Настоящее изобретение относится к устройству для перемещения объекта, относящемуся к типу, определенному в преамбуле первого пункта формулы изобретения.
В частности, устройство перемещения согласно изобретению приспособлено для перемещения грузов в балансировочной системе.
В настоящее время известны разные средства, двигатели и устройства для перемещения объектов и систем в общем.
Например, известны электродвигатели с колесами или другие системы скольжения.
Известны магнитные средства, двигатели внутреннего сгорания и многие другие системы.
Например, в конкретной области балансировочных систем или устройств существуют средства перемещения разных типов.
Балансировочные устройства представляют собой системы, приспособленные для балансирования элемента, вращающегося вокруг оси вращения, например, вращающегося элемента инструмента и т.п.
Такие балансировочные устройства обычно включают два подвижных груза, которые вращаются вместе с вращающимся элементом, который должен быть сбалансирован, вокруг оси вращения последнего.
Балансировочные устройства также включают средства для измерения несбалансированности элемента, вращающегося вокруг оси вращения, которые приспособлены для постоянной оценки, сбалансирован ли вращающийся элемент при вращении, т.е. расположен ли центр его массы на оси вращения.
Балансировочные устройства описаны в патентных заявках SU-A-1632143 и DE-A-3943759.
Несмотря на то, что большую часть времени подвижные грузы объединены с вращающимся элементом, они также могут двигаться относительно последнего, вращаясь вокруг указанной оси вращения. Когда эти два груза расположены противоположно под углом 180° относительно оси вращения, они не создают несбалансированности вращающегося элемента, но когда они расположены в разных положениях относительно друг друга, они создают несбалансированность для вращающегося тела.
Такую несбалансированности используют для восстановления сбалансированности вращающегося элемента. Таким образом, подвижные грузы задействуют, когда средства для измерения несбалансированности определят таковую.
Подвижные грузы обычно перемещают относительно системы отсчета, формируемой вращающимся элементом при вращении, посредством электродвигателей, расположенных на оси вращения вращающегося элемента и соединенных с грузами посредством зубчатых колес и подобных соединителей.
Одна такая балансировочная система описана в патентной заявке EP 2717032 A, поданной тем же заявителем.
Описанные выше балансировочные устройства имеют несколько важных недостатков.
Фактически, в некоторых случаях часть центральной оси вращающегося элемента занимают другие объекты и устройства, и из-за этого там нельзя расположить двигатели.
Однако, электродвигатели нельзя располагать в положениях не на оси вращения. Фактически, устройства, которые должны быть сбалансированы, часто достигают весьма высокой частоты вращения, порядка десятков тысяч или даже сотен тысяч оборотов в минуту.
Следовательно, электродвигатели, которые расположены не на оси, подвержены центробежному ускорению, которое чрезмерно высокое и может вызвать их поломку.
В патентной заявке US 2006/0005623 A сделана попытка преодолеть этот недостаток путем использования магнитных устройств перемещения.
Такие системы включают подвижные грузы, сформированные из постоянных магнитов и систем перемещения последних, всегда относительно системы отсчета, формируемой вращающимся элементом при вращении, фиксированными магнитами внешними для вращающегося элемента и приспособленными ускорения или замедления грузов, чтобы переместить их относительно вращающегося элемента.
Такое балансировочное устройство расположено в кольце и оставляет центральную часть вращающегося элемента свободной.
Однако описанное выше балансировочное устройство относительно неточное, поскольку подвижные грузы могут быть расположены только в определенных положениях.
Кроме того, магнитные средства во время работы часто захватывают металлический мусор, который в конечном итоге блокирует движение системы, этим также затрудняя техническое обслуживание.
И наконец, такое балансировочное устройство очень сложное и дорогостоящее.
В патенте EP 0124306 B описано устройство, с помощью которого делается попытка преодолеть указанный недостаток путем использования компенсационных грузов, которые могут быть получены путем наполнения или опорожнения контейнеров для жидкости.
Таким образом, такое устройство не включает двигатели, а включает простые форсунки для подачи жидкости под давлением, которая, по требованию, наполняет камеры с окружными секторами, соосными оси вращения, которые представляют собой компенсационные грузы для устранения несбалансированности. Жидкость удерживается в камерах центробежной силой и в случае остановки вращающегося элемента удаляется силой тяжести.
Таким образом, из-за опорожнения при каждой остановке, например, шпинделя, такая система является очень сложной, и после каждого повторного пуска необходима повторная балансировка.
Кроме того, в шлифовальных станках используется охлаждающая жидкость, которая иногда случайно попадает в камеры, вызывая временную несбалансированность вращающегося элемента, что требует дальнейших циклов балансировки.
В этом контексте, техническая задача, лежащая в основе настоящего изобретения, заключается в том, чтобы изобрести устройство для перемещения объекта, способное в значительной мере преодолеть по меньшей мере некоторые из указанных недостатков.
В пределах этой технической задачи одна важная цель изобретения заключается в том, чтобы предложить устройство для перемещения объекта, которое является прочным и устойчивым к повышенным нагрузкам и ускорениям.
Еще одна важная цель изобретения заключается в том, чтобы предложить простое и экономичное устройство перемещения.
И последнее, но не менее важное, одна цель изобретения заключается в том, чтобы предложить устройство перемещения, которое приспособлено для перемещения компенсационных грузов в балансировочном устройстве.
Указанные техническая задача и цели достигнуты устройством для перемещения объекта и способом перемещения объекта, которые заявлены в независимых пунктах прилагаемой формулы изобретения.
Предпочтительные технические решения изложены в зависимых пунктах формулы изобретения.
Признаки и преимущества изобретения станут понятны из подробного описания предпочтительных вариантов его осуществления, содержащего ссылки на прилагаемые чертежи, на которых:
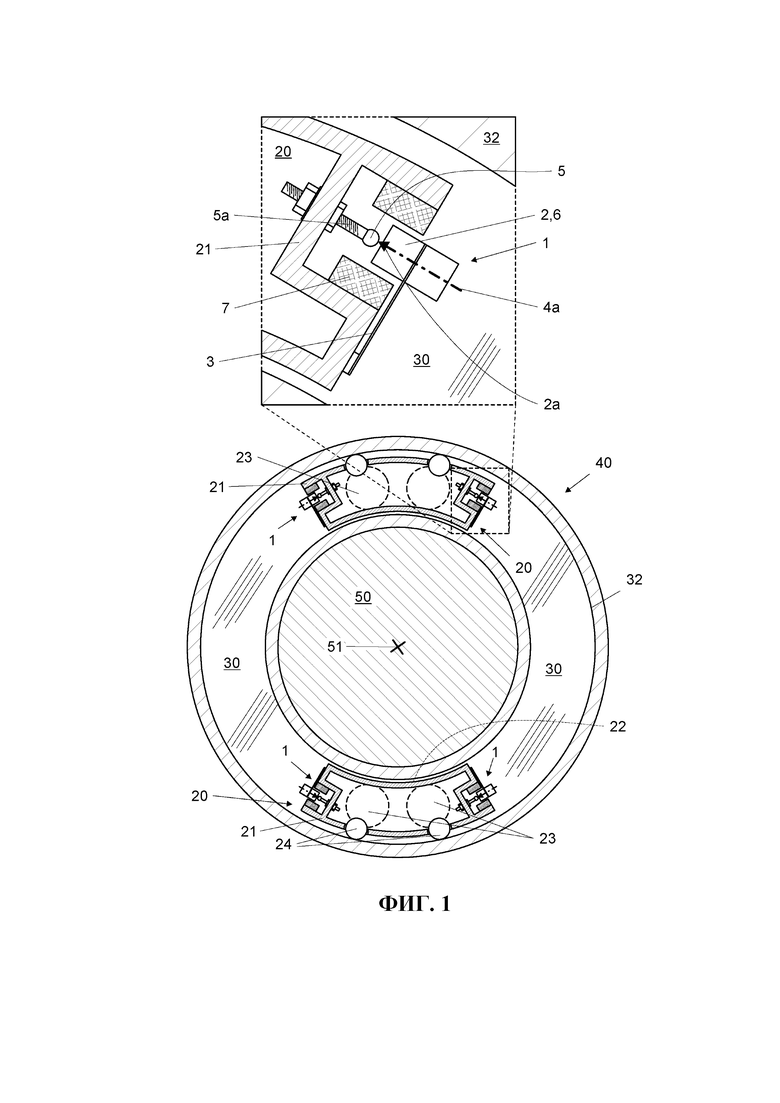
на Фиг. 1 показан увеличенный вид системы в разрезе, включающей устройство изобретения.
В настоящем документе меры, значения, формы и геометрические термины (такие как перпендикулярность и параллелизм) при использовании их со словами наподобие "приблизительно" или другими подобными терминами, такими как "приближенно" или "по существу", должны пониматься как не включающие погрешности или неточности измерений, возникшие в связи с ошибками в производстве и/или изготовлении, и, прежде всего, как не включающие небольшое отклонение от значения, результата измерения, формы или геометрического термина, к которому оно относится. Например, такие термины, если они относятся к значению, предпочтительно указывают, что отклонение не превышает 10% от указанного значения.
Кроме того, если они использованы, такие термины как "первый", "второй", "более высокий", "более низкий", "главный" и "вторичный" необязательно определяют порядок, отношение приоритетов или относительное положение, а могут быть использованы просто для более четкого различения разных компонентов один от другого.
Если не указано иное, значения измерений и данные, приведенные в настоящем документе, должны рассматриваться с использованием атмосферы стандартной для ИКАО (стандарт ISO 2533:1975).
Со ссылкой на чертежи, численная ссылка 1 обозначает в общем устройство перемещения согласно изобретению.
Оно приспособлено для перемещения объекта 20 по поверхности 30 перемещения. Таким образом, объект 20 включает по меньшей мере одно устройство 1 перемещения, а также, предпочтительно, по меньшей мере одну по существу жесткую раму 21. Таким образом, рама 21 является по меньшей мере одной частью объекта 20, которая может быть определена как по существу жесткая, например, изготовлена из металла или стойких полимеров или имеет размеры, которые делают ее стойкой и т.д.
Изобретение также относится к устройству 40 переменной конфигурации, включающему поверхность 30 перемещения и по меньшей мере один подвижный объект 20.
Вкратце, устройство 1 перемещения включает ударный груз 2 и средства подвески 3, которые ограничивают ударный груз 2 на объекте 20. Таким образом, средства подвески ограничены объектом 20 и ударным грузом 2.
Ударный груз 2 предпочтительно изготовлен главным образом из металла, более предпочтительно главным образом из стали.
Устройство 1 перемещения также включает средства 4 перемещения, приспособленные для неоднократного перемещения ударного груза 2 по замкнутому пути 4a, предпочтительно ограниченному объектом 20.
Предпочтительно, средства 4 перемещения относятся к магнитному типу и предпочтительно включают постоянный магнит 6 и соленоид 7.
Предпочтительно, постоянный магнит 6 также ограничен ударным грузом 2, более предпочтительно выполнен как одно целое с ударным грузом 2 и является по меньшей мере частью этого груза, предпочтительно существенной частью ударного груза 2.
Предпочтительно, соленоид 7 расположен около по меньшей мере части ударного груза 2. Он также получает электропитание, предпочтительно переменного тока, чтобы создавать переменное магнитное поле, используемое для перемещения постоянного магнита 6 переменным движением.
Таким образом, устройство 1 перемещения предпочтительно включает средства подачи, предпочтительно электрического тока, для соленоида 7. Они могут быть расположены в объекте 20 или снаружи его и соединены с последним посредством кабельного или беспроводного электрического соединения, например, посредством электромагнитной индукции.
Средства подвески 3, которые соединяют ударный груз 2 с объектом 20, предпочтительно с рамой 21, предпочтительно выполнены как упругий элемент, например, пластинчатая пружина или магнитная подвеска.
Средства подвески 3 предпочтительно также определяют замкнутый путь 4a, образуемый линией, проходящей поочередно в противоположных направлениях. Эта линия предпочтительно является дугой окружности или отрезком прямой линии и т.д. Таким образом, средства подвески 3 предпочтительно являются пластинчатой пружиной, предпочтительно ограниченной на одном конце объектом 20 и, более конкретно, рамой 21 и на противоположном конце ударным грузом 2.
Предпочтительно, устройство 1 перемещения также включает головку 5, ограниченную объектом 20 и приспособленную для создания препятствия на замкнутом пути 4a, таким образом предпочтительно расположенную на пути ударного груза 2.
В примере линейного перемещения ударного груза 2 головка 5 определяет один конец замкнутого пути 4a. Она также предпочтительно перпендикулярна замкнутому пути 4a в точке контакта. Могут быть представлены разные головки 5, хотя предпочтительно не противоположные, и предпочтительно используется только одна головка.
Предпочтительно, головка 5 также выполнена как одно целое с рамой 21 объекта 20. Положение головки 5 относительно замкнутого пути также предпочтительно может регулироваться. Например, головка 5 может быть расположена на конце стержня 5a с резьбой, который ввинчивают в раму 21 и сдвигают к ударному грузу 2 или от него в положении покоя.
Головка 5 предпочтительно имеет сферическую поверхность, по меньшей мере в части, по которой ударяет ударный груз 2. В заключение, она предпочтительно изготовлена из стали или подобного материала.
Взаимная помеха ударного груза 2 и головки 5 происходит в направлении линии 2a перемещения.
Устройство 1 перемещения также включает средства 23 для соединения объекта 20 с поверхностью 30 перемещения, которые подходят для создания трения между объектом 20 и поверхностью 30 перемещения.
Средства 23 соединения следовательно включают опорную поверхность 22 для объекта 20 и поверхности 30 перемещения.
Средства 23 соединения также могут не включать других элементов и использовать силу тяжести и дополнительные противовесы или грузы для создания упомянутого трения.
Альтернативно, средства 23 соединения включают упругие упорные средства, приспособленные для прижатия объекта 20 к упомянутой поверхности 30 перемещения. Средства 23 соединения, в частности в этом последнем случае, могут быть регулируемыми, например, посредством регулировки сжатия пружины, представляющей упругие упорные средства, которая действует путем прижатия опорной поверхности 22 к поверхности 30 перемещения.
Дополнительно или исключительно, средства 23 соединения также могут включать магнитные средства 31, приспособленные для прижатия опорной поверхности 22 объекта 20 к поверхности 30 перемещения.
Предпочтительно, поверхность 30 перемещения определяет линейный путь, который предпочтительно проходит в направлении 2a перемещения. В частности, этот путь может быть кольцеобразным и т.п. Предпочтительно, путь проходит исключительно по линейной траектории, например, окружной или прямолинейной и т.д.
Предпочтительно, объект 20 также включает некоторое множество устройств 1 перемещения, каждой из которых приспособлено для перемещения объекта 20 в разных направлениях и по разным линиям 2a перемещения.
Более предпочтительно, используются два устройства 1 перемещения, включенные в объект 20, которые определяют одно и то же направление 2a перемещения и противоположные линии. Таким образом, упомянутые устройства 1 перемещения приспособлены для перемещения в одном направлении или в противоположном направлении по линейной траектории, определяемой поверхностью 30 перемещения.
Кроме того, средства 23 соединения, средства 4 перемещения, ударный груз 2 и другие элементы выбирают или регулируют таким образом, чтобы, когда ударный груз 2 образует взаимную помеху с головкой 5, он вызывал силу реакции, приспособленную для перемещения объекта 20, предпочтительно рамы 21, относительно поверхности 30 перемещения и превосходящую силу трения, присутствующую между объектом 20 и поверхностью 30.
Фактически, когда ударный груз 2 образует взаимную помеху с головкой 5, взаимодействие этих двух объектов вызывает импульсную силу, вызываемую внезапным торможением ударного груза 2, который ударяется о головку 5 и отскакивает в противоположном направлении. Фактически, это внезапное торможение является ничем другим как весьма повышенным ускорением в противоположном направлении.
Большое ускорение ударного груза 2 вызывает прямо пропорциональную силу, которая, по принципу сохранения центра масс, создает равную и противоположно направленную силу, которая перемещает объект 20. Эта сила превышает порог статического трения между поверхностью 30 перемещения и объектом 20. Фактически, как известно, тело, на которое действует сила и трение, при оптимальном приближении, перемещается только в том случае, если превышен порог статического трения.
После начала движения начинает действовать динамическое трение, которое меньше статического трения. Следовательно, объект 20 перемещается по линии перемещения в направлении 2a смещения объекта прямо пропорционально ускорению и массе ударного груза 2 и обратно пропорционально его массе. Понятно, что объект 20 перемещается вместе с компонентами, соединенными с ним и ограниченными им, такими как ударный груз 2 и средства 4 перемещения.
Кроме того, средства 23 соединения, средства 4 перемещения, ударный груз 2 и другие элементы выбирают или регулируют таким образом, чтобы, когда ударный груз 2 не создает взаимную помеху с головкой 5 на замкнутом пути 4a, не возникали силы реакции, которые способны перемещать объект 20 относительно поверхности 30 перемещения, преодолевая вышеупомянутое трение.
Например, концевой ограничитель пути 4a на противоположной стороне головки 5, в форме, например, упругого концевого упора пружины, которая представляет собой средства подвески 3, вызывает возвратное ускорение, которого недостаточно для того, чтобы преодолеть порог статического трения.
Следовательно, объект 20 не движется по направлениям и линиям, отличающимся от линии и направления 2a перемещения.
Такая асимметрия вызывает перемещение объекта 20 по линии и в направлении 2a перемещения при каждом цикле движения по пути 4a.
Следовательно, путем регулировки числа или частоты проходов по пути 4a можно регулировать перемещение и скорость объекта 20.
Элементы, такие как средства 23 соединения, средства 4 перемещения, ударный груз 2 и др., может легко выбрать специалист в данной области техники. В частности, если ударный груз 2 и головка 5 изготовлены из вышеуказанных материалов, которые имеют большую упругость и стойкость, упомянутая импульсивная сила торможения доводится до максимума. Масса ударного груза 2, например, предпочтительно составляет от 1/100 до 1/5 от массы объекта 20. Выбор упрощается также потому, что упругая возвратная импульсивная сила, вызываемая взаимодействием ударного груза 2 с головкой 5, обычно на порядок или несколько порядков больше силы реакции, которая возникает без столкновений. Следовательно, перемещать объект 20 очень легко только при таких столкновениях.
Предпочтительно, объект 20 также включает некоторое множество устройств 1 перемещения, каждое из которых приспособлено для перемещения массы 20 в другом направлении и по другой линии 2a перемещения. Предпочтительно, используют два устройства, которые действуют в одном направлении и по противоположным линиям. Устройства 1 перемещения предпочтительно могут приводиться в действие по одному по команде, определяя перемещение объекта 20 по линии и в направлении 2a перемещения с определенной скоростью для определенного объекта.
Устройство 40 переменной конфигурации как преимущество и предпочтительно является частью балансировочного устройства вращающегося элемента 50, который способен вращаться вокруг оси вращения 51. Балансировочное устройство предпочтительно использовать для роторов 50 инструментов, в частности для шлифовальных устройств, более конкретно для шлифовальных кругов.
Балансировочное устройство включает балансировочные грузы, предпочтительно некоторое их множество, более предпочтительно два груза, вращающиеся вместе с вращающимся элементом 50 и перемещаемые относительно этого элемента, чтобы компенсировать несбалансированность.
Устройство 1 перемещения идеально для перемещения балансировочных грузов. Так, каждый объект 20 предпочтительно является балансировочным грузом, приспособленным для устранения несбалансированности вращающегося элемента 50 при вращении вокруг оси 51.
В этом случае поверхность 30 перемещения может быть ограничена, предпочтительно может составлять одно целое с вращающимся элементом 50, и по существу имеет форму кольца с осью, совпадающей с осью вращения 51. Таким образом, она определяет окружную траекторию с осью, совпадающей с осью вращения 51.
Таким образом, балансировочные грузы являются объектами 20, каждый из которых предпочтительно по существу определяет сектор окружности с осью, совпадающей с осью вращения 51.
Устройства 1 перемещения изготовлены предпочтительно так, как сказано выше, и для одного объекта 20 используют два таких устройства.
Они определяют противоположные направления, чтобы перемещать объект 20 по часовой стрелке или против часовой стрелки путем вращательного перемещения по оси вращения 51 или путем переднего или обратного перемещения по кольцеобразному пути на поверхности 30 перемещения.
Средствами подвески 3 предпочтительно являются пластинчатые пружины, размещенные главным образом в радиальном направлении, и ударные грузы 2 также, предпочтительно, имеют центр масс, лежащий на пластинчатой пружине, так что центробежная сила действует вдоль оси пластинчатой пружины, не деформируя ее.
Средствами 23 соединения, показанными на Фиг. 1, предпочтительно являются магнитные средства, при этом поверхность 30 предпочтительно изготовлена из шлифованной стали, и поверхность 22 может быть изготовлена из полимерного материала, такого как ПТФЭ, ПЭ или подобного.
Объект 2, который является балансировочным грузом, также предпочтительно включает элементы 24 с низким коэффициентом трения, предпочтительно роликовые подшипники, которые регулируют взаимодействие между наружным кольцом 32 или верхней частью, которая ограничивает поверхность 23 снаружи, и верхней поверхностью объекта 20. Фактически, когда инструмент достигает повышенной скорости, сила взаимодействия между этими двумя поверхностями очень большая, близко к тонне, и элементы с низким коэффициентом трения необходимы для предотвращения трения, вызываемого полной блокировкой перемещаемых объектов 20 относительно вращающегося элемента 50.
И в заключение, балансировочное устройство включает другие устройства и средства, известные как таковые, такие как датчики несбалансированности, обычно являющиеся датчиком вибрации, средствами контроля и т.д.
Подобные балансировочные устройства и их работа описаны, например, в следующих патентных документах: EP 2717032 A, с абзаца 22 до абзаца 62 и на фигурах 1 – 4, или EP 0409050 B1, с колонки 3, строка 20, до колонки 5, строка 46, и на фигурах 1 – 4. Единственным отличием настоящего балансировочного устройства от указанных патентных документов является то, что в последних балансировочные грузы перемещаются посредством электродвигателей, расположенных на оси вращающегося элемента, тогда как в настоящем случае балансировочные грузы перемещаются устройствами 1 перемещения, описанными выше.
Изобретение включает новый способ перемещения объекта 20 по поверхности 30 перемещения посредством устройства 1 перемещения. Такой способ предпочтительно реализуется с физическими элементами и конкретными или функциональными параметрами, описанными выше.
Данный способ перемещения включает следующие этапы:
- неоднократное перемещение ударного груза 2 по замкнутому пути 4a, предпочтительно так, как сказано выше,
- столкновение ударного груза 2 с головкой 5 на линии и в направлении 2a перемещения, что вызывает силу реакции, превышающую упомянутое трение, которая способна перемещать объект 20 относительно поверхности 30 перемещения, предпочтительно так, как сказано выше,
- перемещение ударного груза 2 по замкнутому пути 4a без столкновения, что не вызывает сил реакции, превосходящих упомянутое трение, которые способны перемещать объект 20 относительно поверхности 30 перемещения, предпочтительно так, как сказано выше.
Этот способ также, предпочтительно, является способом балансировки вращающегося элемента.
Устройство 1 перемещения и балансировочное устройство согласно изобретению имеют важные преимущества.
Фактически, устройство 1 перемещения состоит из нескольких деталей и является прочным и стойким к повышенной нагрузке и ускорениям. Таким образом, оно простое и экономичное.
Кроме того, устройство 1 перемещения идеально для перемещения компенсационных грузов в балансировочном устройстве. Фактически, оно легко сопротивляется весьма повышенным центробежным ускорениям и не требует внешнего двигателя для вращения, а требует только источника электропитания, который может быть расположен внутри груза или объекта 20 или может быть подсоединен от внешней сети посредством электромагнитной индукции и т.д.
Описанное выше балансировочное устройство также позволяет получить кольцевую конструкцию, которая оставляет свободной осевую часть этого устройства.
В изобретение могут быть внесены изменения, которые подпадают под объем изобретательской идеи, определенной в формуле изобретения. В этом контексте все детали могут быть заменены эквивалентными элементами, и могут быть использованы любые материалы, формы и размеры.
Группа изобретений относится к области машиностроения. Устройство переменной конфигурации для перемещения подвижного объекта включает поверхность перемещения и подвижный объект. Объект включает устройство для перемещения объекта по поверхности перемещения. Устройство для перемещения включает ударный груз и средства подвески, ограничивающие ударный груз объектом, средства перемещения, приспособленные для неоднократного перемещения ударного груза по замкнутому пути и ограниченные объектом, головку, ограниченную объектом и приспособленную для создания взаимной помехи с замкнутым путем, причем ударный груз создает взаимную помеху с головкой на линии и в направлении перемещения, средства соединения для соединения объекта с поверхностью перемещения, приспособленные для создания трения между объектом и поверхностью перемещения. Когда ударный груз создает взаимную помеху с головкой, это вызывает силу реакции, превосходящую трение, которая способна перемещать объект относительно поверхности перемещения. Когда ударный груз не создает взаимную помеху с головкой на замкнутом пути, это не вызывает сил реакции, превосходящих трение, которые способны перемещать объект относительно поверхности перемещения. Также заявлено балансировочное устройство, включающее такое устройство переменной конфигурации для перемещения подвижного объекта, и способ перемещения объекта по поверхности. Обеспечивается повышение надежности устройства. 3 н. и 9 з.п. ф-лы, 1 ил.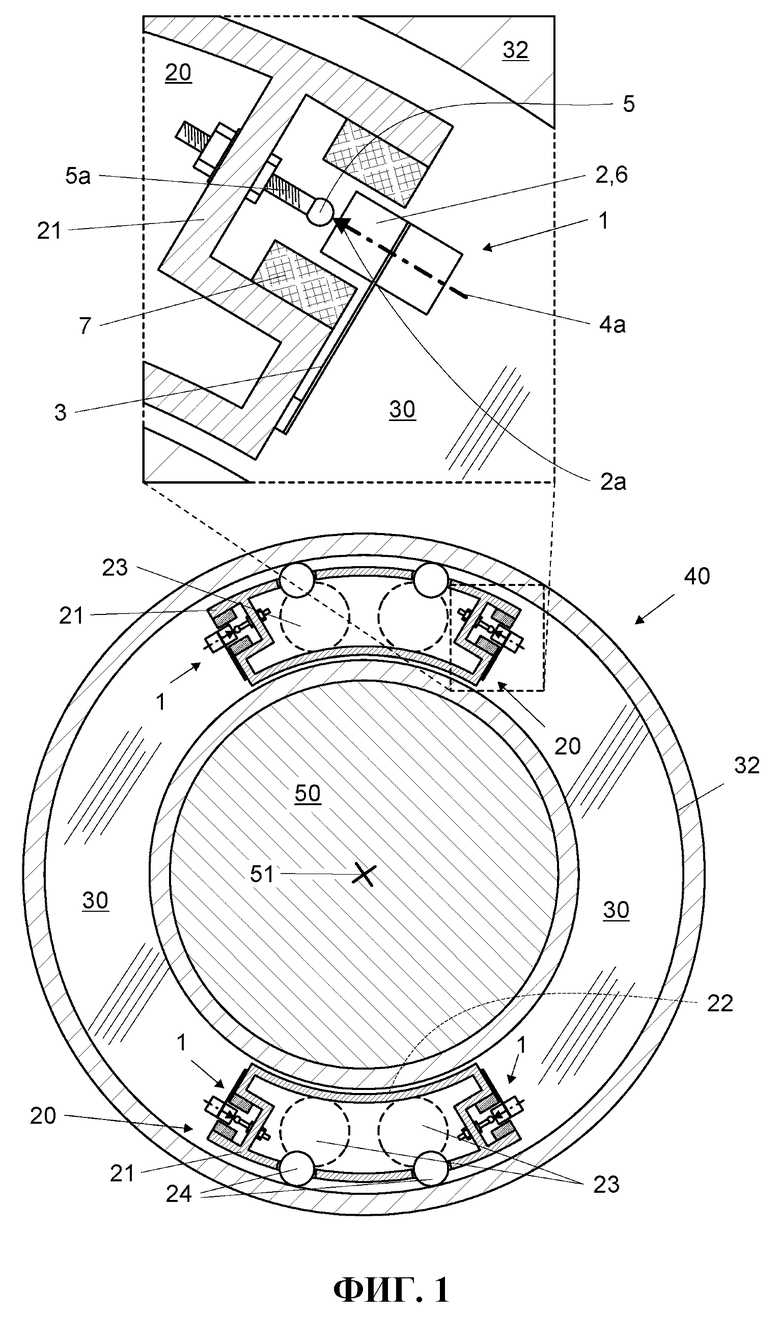
1. Устройство (40) переменной конфигурации для перемещения подвижного объекта (20), включающее поверхность (30) перемещения и выполненное с возможностью взаимодействия с по меньшей мере одним подвижным объектом (20), причем упомянутый объект (20) включает по меньшей мере одно устройство (1) для перемещения упомянутого объекта (20) по упомянутой поверхности (30) перемещения, отличающееся тем, что устройство (1) для перемещения включает:
- ударный груз (2) и средства (3) подвески, ограничивающие упомянутый ударный груз (2) упомянутым объектом (20),
- средства (4) перемещения, приспособленные для неоднократного перемещения упомянутого ударного груза (2) по замкнутому пути (4a) и ограниченные упомянутым объектом (20),
- головку (5), ограниченную упомянутым объектом (20) и приспособленную для создания взаимной помехи с упомянутым замкнутым путем (4a),
- причем упомянутый ударный груз (2) создает взаимную помеху с упомянутой головкой (5) на линии и в направлении (2a) перемещения,
- средства соединения (23) для соединения упомянутого объекта (20) с упомянутой поверхностью (30) перемещения, приспособленные для создания трения между упомянутым объектом (20) и упомянутой поверхностью (30) перемещения,
- когда упомянутый ударный груз (2) создает взаимную помеху с упомянутой головкой (5), это вызывает силу реакции, превосходящую упомянутое трение, которая способна перемещать упомянутый объект (20) относительно упомянутой поверхности (30) перемещения,
- когда упомянутый ударный груз (2) не создает взаимную помеху с упомянутой головкой (5) на упомянутом замкнутом пути (4a), это не вызывает сил реакции, превосходящих упомянутое трение, которые способны перемещать упомянутый объект (20) относительно упомянутой поверхности (30) перемещения.
2. Устройство (40) переменной конфигурации по п. 1, отличающееся тем, что упомянутые средства (4) перемещения включают постоянный магнит (6) и соленоид (7).
3. Устройство (40) переменной конфигурации по п. 2, отличающееся тем, что упомянутый постоянный магнит (6) выполнен как одно целое с упомянутым ударным грузом (2) и является по меньшей мере его частью.
4. Устройство (40) переменной конфигурации по п. 1, отличающееся тем, что упомянутые средства подвески (3) выполнены как упругий элемент, и упомянутый замкнутый путь (4a) образует линию для прохода в противоположных направлениях.
5. Устройство (40) переменной конфигурации по п. 1, отличающееся тем, что упомянутый объект (20) включает жесткую раму (21), и упомянутая головка (5) выполнена как одно целое с упомянутой жесткой рамой (21).
6. Устройство (40) переменной конфигурации по п. 1, отличающееся тем, что упомянутые средства соединения (23) включают опорную поверхность (22), выполненную с возможностью поддержки упомянутого объекта (20) и поверхности перемещения (30).
7. Устройство (40) переменной конфигурации по п. 1, отличающееся тем, что упомянутые средства соединения (23) включают упругие упорные средства, приспособленные для прижатия упомянутого объекта (20) к упомянутой поверхности перемещения (30).
8. Устройство (40) переменной конфигурации по п. 1, отличающееся тем, что упомянутые средства соединения (23) включают магнитные средства (31), приспособленные для прижатия упомянутого объекта (20) к упомянутой поверхности перемещения (30).
9. Устройство (40) переменной конфигурации по п. 1, включающее некоторое множество упомянутых устройств перемещения (1), каждое из которых приспособлено для перемещения упомянутого объекта (20) по разным линиям и в разных направлениях (2a) перемещения.
10. Балансировочное устройство для вращающегося элемента (50), включающее устройство (40) переменной конфигурации по п. 1 или 9, причем упомянутый вращающийся элемент (50) вращается вокруг оси вращения (51), отличающееся тем, что упомянутая поверхность перемещения (30) выполнена как одно целое с упомянутым вращающимся элементом (50) и имеет по существу кольцеобразную форму, при этом ось совпадает с упомянутой осью вращения (51), а упомянутый по меньшей мере один объект (20) является балансировочным грузом, приспособленным для устранения несбалансированности упомянутого вращающегося элемента (50) при вращении относительно упомянутой оси вращения (51).
11. Балансировочное устройство по п. 10, отличающееся тем, что используются два упомянутых объекта (20), являющихся балансировочными грузами, каждый из которых включает два упомянутых устройства (1) перемещения, приспособленных для перемещения каждого из упомянутых объектов (20) в противоположных направлениях и в направлении вращения вокруг упомянутой оси вращения (51) по упомянутой кольцевой поверхности перемещения (30).
12. Способ перемещения объекта (20) по поверхности (30) перемещения в устройстве (40) переменной конфигурации по любому из пп. 1-9, причем упомянутый способ перемещения отличается тем, что включает следующие этапы:
- неоднократное перемещение упомянутого ударного груза (2) по упомянутому замкнутому пути (4a),
- столкновение упомянутого ударного груза (2) с упомянутой головкой (5) на линии и в направлении (2a) перемещения, что вызывает силу реакции, превосходящую упомянутое трение, которая способна перемещать упомянутый объект (20) относительно упомянутой поверхности (30) перемещения,
- перемещение упомянутого ударного груза (2) по упомянутому замкнутому пути (4a) без упомянутого столкновения, что не вызывает сил реакции, превосходящих упомянутое трение, которые способны перемещать упомянутый объект (20) относительно упомянутой поверхности (30) перемещения.
| Корректирующая масса | 1985 |
|
SU1632143A1 |
| DE 3943759 C2, 31.10.1996 | |||
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ КООРДИНАТ ТОЧЕК ОБЪЕКТОВ, НАХОДЯЩИХСЯ В ЖИДКОСТИ | 2003 |
|
RU2248523C1 |

