Техническое решение относится к оптике, к средствам ввода оптических компонентов в оптический тракт и может быть использовано в объективах, в которых при их функционировании требуется смена оптических компонентов для изменения рабочих характеристик объективов.
Известно устройство для ввода оптического компонента в оптический тракт (описание к авторскому свидетельству СССР №1840330 на изобретение, опубликовано 27.09.2006), содержащее корпус с направляющими ячейками, герметизированными от внешней среды, оправы оптических компонентов (светофильтров), которые установлены с возможностью призонного перемещения в них, пневмораспределители с входными и выходными отверстиями и сильфоны, сообщающиеся с входными отверстиями пневмораспределителей, выходные отверстия пневмораспределителей выполнены сообщающимися между собой и герметизированы от внешней среды, причем полость ячеек, сообщающаяся с выходными отверстиями, заполнена рабочей средой под давлением согласно соотношению G<P S<P1S, где: G - вес светофильтров с оправой; Р - давление в полости ячеек, сообщающихся с выходными отверстиями пневмораспределителей; Р1 - давление внутри каждого сильфона при максимальной его деформации; S - полезная площадь торцевой поверхности оправы.
В качестве ближайшего аналога принято устройство для ввода оптического компонента в оптический тракт (описание к патенту РФ №2047192 на изобретение, опубликовано 27.01.1995), содержащее корпус с направляющими ячейками и размещенными в них оправами с оптическими компонентами, полые элементы, сообщающиеся с полостями ячеек, распределительный вал и привод, подпружиненный шток с винтовой канавкой, выполненный с возможностью поступательного перемещения, осуществляемого через гибкую связь, снабженную кольцевым элементом и взаимодействующую с корпусом устройства через дополнительный полый цилиндрический упругий элемент, штифт для предохранения штока от разворота относительно корпуса, установленный с возможностью перемещения в пазу, причем шток сочленен с вращающимся полым распределительным валом с помощью пальца, жестко закрепленного в нем и установленного с возможностью перемещения в винтовом пазу штока.
Для приведенных аналогов существует необходимость приложения механического усилия для замены оптического компонента в тракте (его введении в оптический тракт), обусловливаемая конструктивным решением описанных устройств. В связи с этим конструкции приведенных устройств затрудняют возможность автоматизации ввода оптических компонентов. Относительно каждого из аналогов сложность конструкции, обуславливаемая большим количеством конструктивных элементов, приводит к снижению надежности, возможности выхода из строя и, как следствие, ограничению срока эксплуатации. Также для них характерны высокие затраты при их массовом производстве. Известные устройства отличаются большими габаритами, что делает их не универсальными. Кроме того, по конструктивным причинам устройства характеризуются инерционностью срабатывания - сниженным быстродействием.
Разработка предлагаемого устройства направлена на решение технической проблемы создания средства для ввода оптического компонента в оптический тракт, не требующего больших затрат при массовом производстве, отвечающего требованиям простоты сборки и универсальности использования, условию надежности и снижения инерционности замены оптического компонента в тракте за счет достигаемого технического результата.
Техническим результатом при использовании предлагаемого устройства является:
- достижение повышения его надежности, снижение вероятности его выхода из строя и, как следствие, увеличения срока эксплуатации;
- повышение быстродействия.
Технический результат достигается устройством для ввода оптического компонента в оптический тракт, содержащим корпус, оправу с оптическим компонентом, с корпусом совмещен статор электродвигателя, при этом пакет статора выполнен с сердечниками, на которых установлены образующие фазы катушки, ротор выполнен на основе роликового подшипника с наружным кольцом, жестко связанным с корпусом, с внутренним кольцом, выполненным с возможностью совершения вращательного движения, снабженным постоянными магнитами на его внутренней цилиндрической поверхности, с реализацией возможности воздействия магнитного поля на проводник катушек, внутреннее кольцо жестко соединено своей внешней плоской кольцевой поверхностью с диском, в котором выполнены отверстия для установки в каждом оправы с оптическим компонентом.
В устройстве ротор выполнен на основе роликового подшипника, а именно, цилиндрического однорядного радиального роликового подшипника, внутреннее кольцо роликового подшипника реализовано однобортным внутренним кольцом с плоским упорным кольцом, при этом оно жестко соединено своей внешней плоской кольцевой поверхностью, которая снабжена бортом, с диском, а плоское упорное кольцо, выполненное с возможностью прижима, расположено со стороны другой плоской кольцевой поверхности внутреннего кольца, обращенной к статору, между внешним и внутренним кольцами роликового подшипника расположены ролики, каждый из роликов отделен от ближайшего соседнего ролика сепаратором из фторопласта, постоянные магниты на внутренней цилиндрической поверхности внутреннего кольца наклеены в количестве 24 штук, при этом между магнитами и катушками сформирован в радиальном направлении зазор.
В устройстве пакет статора, выполненный с сердечниками, на которых установлены катушки, образующие фазы, реализован в составе двух идентичных раздельных частей, в отношении каждой части реализовано по два сердечника, каждый из сердечников реализован в виде стержня, расположенного параллельно относительно поверхности пакета статора с зазором в радиальном направлении, величина которого достаточна для установки на сердечник катушки и для совершения вращательного движения внутренним кольцом роликового подшипника, на основе которого выполнен ротор, на сердечниках одной части пакета статора установлены две катушки, соединенные последовательно с образованием одной фазы, а на сердечниках второй части пакета статора установлены другие две катушки, соединенные последовательно с образованием второй фазы.
В устройстве в диске выполнены четыре отверстия для установки в каждом оправы с оптическим компонентом.
Сущность предлагаемого технического решения поясняется нижеследующим описанием и прилагаемыми фигурами.
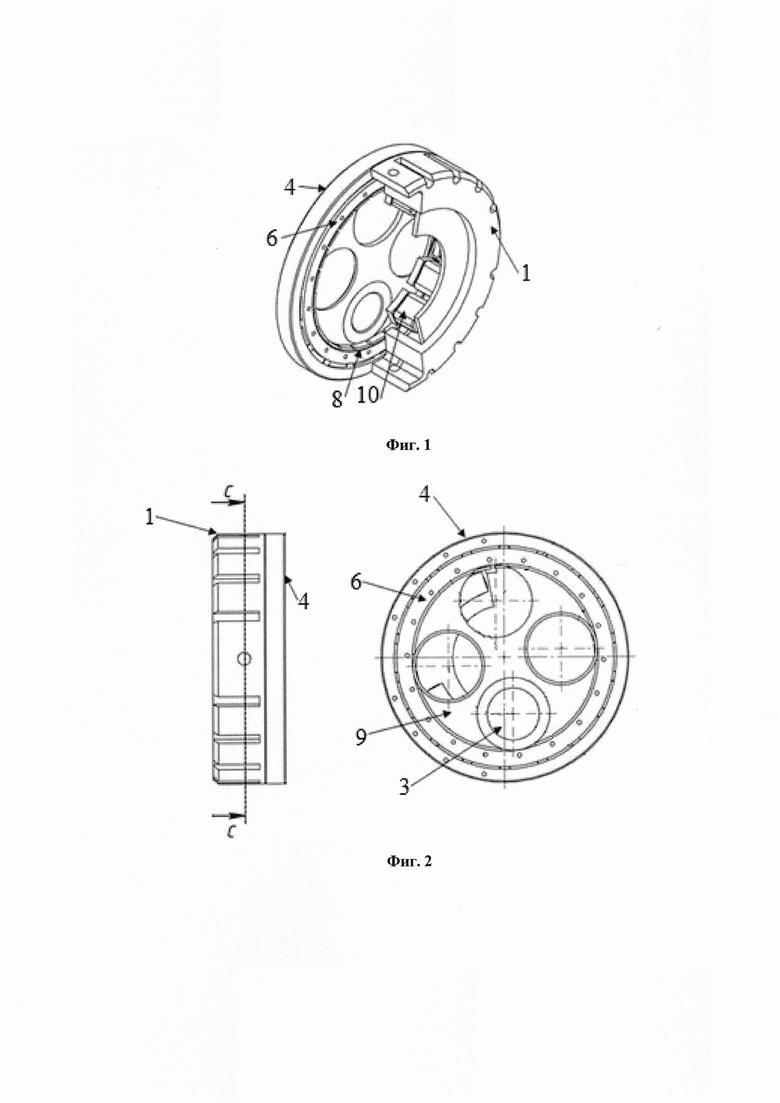
На Фиг. 1 показано устройство для ввода оптического компонента в оптический тракт с демонстрацией его внутреннего выполнения, где: 1 - корпус; 4 - наружное кольцо подшипника; 6 - внутреннее кольцо подшипника; 8 - постоянный магнит; 10 - катушка.
На Фиг. 2 показано устройство для ввода оптического компонента в оптический тракт сбоку и спереди, где: 1 - корпус; 3 - оправа; 4 - наружное кольцо подшипника; 6 -внутреннее кольцо подшипника; 9 - диск.
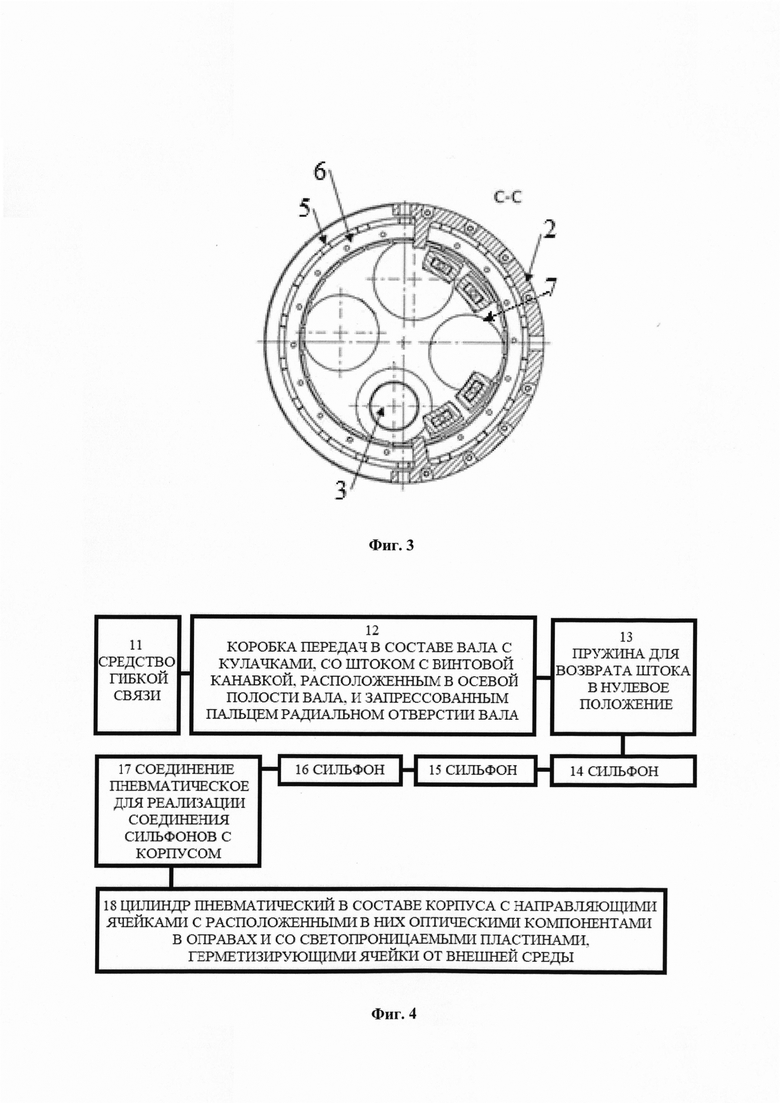
На Фиг. 3 показано устройство для ввода оптического компонента в оптический тракт спереди с поперечным разрезом, где: 2 - пакет статора; 3 - оправа; 5 - ролики; 6 -внутреннее кольцо подшипника; 7 - отверстие.
На Фиг. 4 показана структурная схема, отражающая в устройстве, принятом за прототип, связи узлов элементов, в отношении которых выход из строя любого элемента приводит к отказу работы устройства, где: 11 - средство гибкой связи; 12 - коробка передач в составе вала с кулачками, со штоком с винтовой канавкой, расположенным в осевой полости вала, и с запрессованным пальцем в радиальном отверстии вала; 13 - пружина для возврата штока в нулевое положение; 14, 15 и 16 - сильфоны; 17 - соединение пневматическое для реализации соединения сильфонов с корпусом; 18 - цилиндр пневматический в составе корпуса с направляющими ячейками с расположенными в них оптическими компонентами в оправах и со светопроницаемыми пластинами, герметизирующими ячейки от внешней среды.
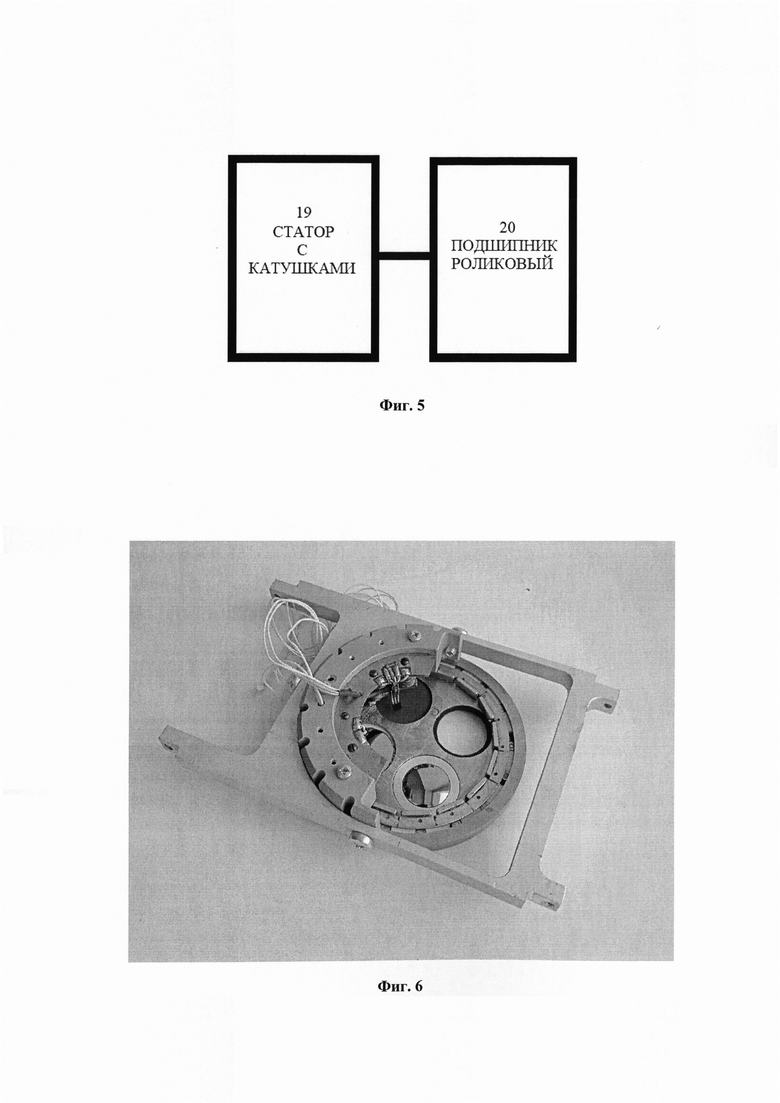
На Фиг. 5 представлена структурная схема, отражающая в предлагаемом устройстве связи узлов элементов, в отношении которых выход из строя любого элемента приводит к отказу работы устройства, где: 19 - статор с катушками; 20 - подшипник роликовый.
На Фиг. 6 представлена фотография устройства для ввода оптического компонента в оптический тракт.
К отличительным особенностям предлагаемого устройства по сравнению с прототипом относятся конструктивные особенности (см. Фиг. 1-3), которые позволяют перейти от введения оптического компонента в тракт за счет прилагаемого механического усилия к введению его путем использования вращательного движения, возникающего в результате действия электромагнитной силы - при взаимодействии проводника с током и магнитного поля. Так, устройство характеризуется отличиями, заключающимися в том, что его корпус 1 совмещен со статором электродвигателя, при этом пакет статора 2 снабжен сердечниками, на которых установлены катушки 10, образующие фазы, ротор выполнен на основе роликового подшипника, с наружным кольцом 4, жестко связанным с корпусом 1, с внутренним кольцом 6, выполненным с постоянными магнитами 8 на его внутренней цилиндрической поверхности с реализацией возможности воздействия магнитного поля на проводник катушек 10, внутреннее кольцо 6 жестко соединено своей внешней плоской кольцевой поверхностью с диском 9, в котором выполнены отверстия 7 для установки в каждом из них оптического компонента.
Влияние указанных особенностей на достижение технического результата в части повышения надежности устройства, снижения вероятности его выхода из строя и, как следствие, увеличения срока эксплуатации подтверждается следующим.
Надежность устройств, безотказность их в работе, оценивается суммарной вероятностью безотказной работы всех элементов в их узлах n, составляющих устройство (Приводы машин: Справочник / В. В. Длоугий, Т. И. Муха, А. П. Цупиков, Б. В. Януш; Под общ. ред. В. В. Длоугого. - 2-е изд., перераб. и доп. - Ленинград: Машиностроение, Ленинградское отделение, 1982. - 383 с, ил., стр. 366), по формуле:

При выполнении практических расчетов надежности механических систем используется хорошо согласующийся с опытными данными экспоненциальный закон распределения времени между отказами (Приводы машин: Справочник / В. В. Длоугий, Т. И. Муха, А. П. Цупиков, Б. В. Януш; Под общ. ред. В. В. Длоугого. - 2-е изд., перераб. и доп. - Ленинград: Машиностроение, Ленинградское отделение, 1982. - 383 с., ил., стр. 366). Вероятность безотказной работы определяется по формуле:

где  - интенсивность отказов всей системы.
- интенсивность отказов всей системы.

где  - интенсивность отказов элемента i.
- интенсивность отказов элемента i.
В выбранном прототипе ввод оптического компонента в оптический тракт осуществляется посредством сложной системы, включающей восемнадцать конструктивных элементов. В их числе элементы, образующие узлы 11-18, а именно: средство гибкой связи (узел 11), коробка передач в составе вала с кулачками, со штоком с винтовой канавкой, расположенным в осевой полости вала, и с запрессованным пальцем в радиальном отверстии вала (узел 12), пружина для возврата штока в нулевое положение (узел 13), сильфоны (узлы 14-16), соединение пневматическое для реализации соединения сильфонов с корпусом (узел 17), цилиндр пневматический в составе корпуса с направляющими ячейками с расположенными в них оптическими компонентами в оправах и со светопроницаемыми пластинами, герметизирующими ячейки от внешней среды (узел 18). Данные узлы механически связаны с образованием структурной схемы, отраженной на Фиг. 4. В представленной схеме элементы соединены последовательно. Отказ любого из них приводит к отказу работы устройства в целом.
В отношении узла 11 - средства гибкой связи интенсивность отказа составляет λ11=0,039⋅10-6 ч-1 (ГОСТ 12.1.004-91, стр. 31-32).
Для узла элементов 12 - коробка передач в составе вала с кулачками, со штоком с винтовой канавкой, расположенным в осевой полости вала, и с запрессованным пальцем в радиальном отверстии вала - согласно таблице 18.1, представленной в справочнике (Приводы машин: Справочник / В.В. Длоугий, Т.И. Муха, А.П. Цупиков, Б.В. Януш; Под общ. ред. В.В. Длоугого. - 2-е изд., перераб. и доп. - Ленинград: Машиностроение, Ленинградское отделение, 1982. - 383 с.), видно, что средняя интенсивность отказов данного узла (узел 12, Фиг. 4), составляет λ12=0,068⋅10-5 ч-1.
Относительно пружины для возврата штока в нулевое положение, соответствующей узлу 13, интенсивность отказа составляет λ13=0,22⋅10-6 ч-1 (ГОСТ 12.1.004-91, стр. 31-32).
В то же время в отношении сильфонов - элементов узлов 14, 15 и 16 (см. Фиг. 4) -интенсивность отказа каждого из них равна λ14=λ15=λ16=2,287⋅10-6 ч-1 (ГОСТ 12.1.004-91, стр. 31-32).
В отношении соединения пневматического для реализации соединения сильфонов с корпусом, являющегося узлом элементов 17 (см. Фиг. 4), интенсивность отказа составляет λ17=0,04⋅10-6 ч-1 (ГОСТ 12.1.004-91, стр. 31-32).
Наконец, для узла 18 из нескольких элементов - цилиндр пневматический в составе корпуса с направляющими ячейками с расположенными в них оптическими компонентами в оправах и со светопроницаемыми пластинами, герметизирующими ячейки от внешней среды (см. Фиг. 4) - интенсивность отказа составляет λ18=0,004⋅10-6 ч-1 (ГОСТ 12.1.004-91, стр. 31-32).
Таким образом, используя формулу (3), получаем интенсивность отказов системы в целом:

В соответствии с формулой (2) вероятность безотказной работы устройства-прототипа в течение 20000 часов составляет:

В предлагаемом устройстве реализовано введение оптического компонента в тракт за счет использования вращательного движения, обусловленного действием электромагнитной силы. В устройстве присутствуют ротор, статор с катушками, в отношении принципа работы устройство представляет собой шаговый двигатель, как вариант синхронного бесколлекторного электродвигателя. Диск 9 (см. Фиг. 2), в котором выполнены отверстия 7 (см. Фиг. 3) для установки оправ 3 (см. Фиг. 2 и 3) с оптическими компонентами совершает вращательное движение по роликам 5 (см. Фиг. 3) роликового подшипника, на базе которого выполнен ротор, снабженный постоянными магнитами 8, расположенными на внутренней цилиндрической поверхности внутреннего кольца 6 роликового подшипника, которое жестко соединено с диском 9 (см. Фиг. 1-3). При этом наружное кольцо 4 роликового подшипника соединено жестко со статором с сердечниками, на которых установлены катушки 10, за счет совмещения его с корпусом 1 (см. Фиг. 1 и 2).
В этом случае совершение движения осуществляется только в отношении одного узла - подшипника роликового (см. Фиг. 5), а именно, движение совершает внутреннее кольцо 6. Система включает два узла элементов, задающих надежность в целом - статор с катушками 10 и подшипник роликовый, реализующий вращающееся соединение. Данные узлы элементов механически связаны с образованием структурной схемы, отраженной на Фиг. 5.
Принимая во внимание возможность отказов катушек статора, рассматривая их как индуктивности, средняя интенсивность отказов катушек статора (Прытков С.Ф., Горбачева В.М., Мартынова М.Н., Петров Г.А. Надежность электрорадиоизделий. Справочник -Издательство: МО РФ, 2004, 641 с.) оценивается как λ19=0,05⋅10-6 ч-1. Соединение ансамбля элементов, обеспечивающего ввод оптического компонента в тракт, со статором с катушками можно оценить, как надежность подшипника роликового (ГОСТ 12.1.004-91, стр. 31), характеризуя средней интенсивностью отказов λ20=0,05⋅10-6 ч-1.
В соответствии с формулой (3) получаем:

Вероятность безотказной работы предлагаемого устройства в течение 20000 часов, вычисляемая по формуле (2), составляет:

Расчеты показывают, что вероятность безотказной работы в течение 20000 часов в отношении предлагаемого устройства увеличивается на 13% по сравнению с прототипом.
Кроме того, известно [Приводы машин: Справочник / В. В. Длоугий, Т. И. Муха, А. П. Цупиков, Б.В. Януш; Под общ. ред. В.В. Длоугого. - 2-е изд., перераб. и доп. - Ленинград: Машиностроение, Ленинградское отделение, 1982. - 383 с.], что для восстанавливаемых изделий показателем надежности также является средняя наработка на отказ Т0, определяемая:

В отношении прототипа средняя наработка на отказ Т0 равна:

В отношении предлагаемого устройства средняя наработка на отказ Т0 равна:

Таким образом, нетрудно видеть, что надежность предлагаемого устройства на 93% превосходит надежность прототипа, обеспечивая снижение вероятности его выхода из строя и, как следствие, увеличение срока эксплуатации.
Влияние отличительных особенностей на достижение технического результата в части повышения быстродействия обеспечивается тем, что в отличие от выбранных аналогов, являющихся механическими устройствами, предлагаемое устройство является электромеханическим, ввод в оптический тракт разных оптических компонентов осуществляется в течение 0,5 с за счет действия электромагнитной силы, приводящей во вращение ротор с диском 9, за счет которого происходит ввод в оптический тракт необходимого оптического компонента.
В обобщенном варианте выполнения устройство для ввода оптического компонента в оптический тракт содержит (см. Фиг. 1-3): корпус 1, пакет статора 2 с сердечниками (позиция не показана), оправа 3 с оптическим компонентом (позиция не показана), роликовый подшипник (позиция не показана), постоянные магниты 8, диск 9, катушки 10. С корпусом 1 совмещен статор электродвигателя. При этом пакет статора 2 выполнен с сердечниками, на которых установлены образующие фазы катушки 10 с зазором относительно ротора в радиальном направлении. Ротор выполнен на основе роликового подшипника с наружным кольцом 4 с дорожкой качения под ролики 5 (см. Фиг. 3), расположенной на его внутренней цилиндрической поверхности, и с внутренним кольцом 6, выполненным с возможностью совершения вращательного движения. Наружное кольцо 4 роликового подшипника жестко связано с корпусом 1. Внутреннее кольцо 6 снабжено постоянными магнитами 8 на его внутренней цилиндрической поверхности с реализацией возможности воздействия магнитного поля на проводник катушек 10. Внутреннее кольцо 6 жестко соединено своей внешней плоской кольцевой поверхностью с диском 9. В диске 9 выполнены отверстия 7 для установки в каждом оправы 3 с оптическим компонентом.
Реализация устройства базируется на элементах шагового электродвигателя как одного из вариантов синхронного бесколлекторного электродвигателя.
Наружное кольцо 4 роликового подшипника выполнено из стали и соединено винтами с корпусом 1, выполненным из алюминия.
Катушки 10 намотаны вручную медным проводом ПЭТВ-2 диаметром 0,25 мм. В каждой катушке выполнено 230 витков.
В корпусе 1 расположен пакет статора 2, который реализован в составе двух идентичных раздельных частей, не связанных друг с другом. В отношении каждой части пакета статора 2 реализовано по два сердечника. Каждый из сердечников реализован в виде стержня, расположенного параллельно относительно внутренней поверхности пакета статора 2 с зазором в радиальном направлении, величина которого согласована с размером в радиальном направлении устанавливаемой на сердечник катушки 10. С одной стороны, величина зазора не должна быть слишком малой, должна быть подходящей для реализации установки на сердечник катушки 10, с другой стороны, она не должна быть слишком большой и, таким образом, в частности, оказывать препятствие при установке на стержень катушки 10 совершению вращательного движения внутреннего кольца 6 роликового подшипника, на основе которого выполнен ротор. Сердечники в виде стержней жестко крепятся винтами к вспомогательному элементу (позиция не показана) статора, жестко связанному с корпусом 1 также посредством винтов (см. Фиг. 1 и 6). Данный вспомогательный элемент выполнен дугообразной формы с шириной, обеспечивающий крепление к нему сердечников, и жестко связан с корпусом 1. На сердечниках одной части пакета статора 2 установлены две катушки 10, соединенные последовательно с образованием одной фазы. На сердечниках второй части пакета статора 2 установлены другие две катушки 10, соединенные последовательно с образованием второй фазы. Таким образом, в предлагаемом устройстве используют четырехполюсный статор. Пары катушек 10 разных фаз разделены угловым расстоянием 90°. В диске 9 выполнены четыре отверстия для установки в каждом оправы 3 с оптическим компонентом. Соответственно угловое расстояние между центрами отверстий 7 диска 9 для установки в каждом оправы 3 с оптическим компонентом составляет также 90°.
Ротор на основе роликового подшипника реализован с использованием цилиндрического однорядного радиального роликового подшипника (см. Фиг. 1 и 2). Внутреннее кольцо 6 роликового подшипника реализовано однобортным внутренним кольцом с плоским упорным кольцом. Внутреннее кольцо 6 жестко соединено своей внешней плоской кольцевой поверхностью, которая снабжена бортом, с диском 9. Плоское упорное кольцо внутреннего кольца 6 выполнено с возможностью прижима и расположено со стороны другой плоской кольцевой поверхности внутреннего кольца 6, обращенной к статору. При этом между внешним кольцом 4 и внутренним кольцом 6 роликового подшипника расположены ролики 5 (см. Фиг. 3). Каждый из роликов 5 отделен от ближайшего соседнего ролика 5 сепаратором из фторопласта. На внутренней цилиндрической поверхности внутреннего кольца 6 расположены постоянные магниты 8 с реализацией возможности воздействия магнитного поля на проводник катушек 10 (см. Фиг. 1). Постоянные магниты 8 выполнены из неодима размером 8×4×1 мм3 в количестве 24 штук и наклеены на внутреннюю цилиндрическую поверхность внутреннего кольца 6. Между постоянными магнитами 8 и катушками 10 сформирован в радиальном направлении зазор (см. Фиг. 3). Катушки 10 выполнены подвешенными относительно постоянных магнитов 8 за счет реализации сердечников в виде стержней, расположенных относительно внутренней поверхности пакета статора 2 с зазором в радиальном направлении. При этом диск 9 и внутреннее кольцо 6 выполнены из немагнитного материала.
Предлагаемое устройство (см. Фиг. 6) используют следующим образом.
В отверстия 7 диска 9 устанавливают оправы 3 с требуемыми оптическими компонентами. Фазные выводы соединенных последовательно друг с другом катушек 10 с образованием двух фаз подсоединяют к управляющей плате. Каждую фазу подключают к управляющему транзисторному ключу. Ключи коммутируют фазы двухфазного источника тока. Управление работой устройства осуществляет контроллер. Контроллер связан с датчиком положения внутреннего кольцо 6 роликового подшипника, на основе которого выполнен ротор, и блоком задания скорости вращения.
В зависимости от сигнала датчика положения и от заданной скорости вращения с помощью ключей происходит коммутация тока в необходимых обмотках, обеспечивая вращательное движение внутреннего кольца 6, жестко связанного с диском 9, в отверстиях 7 которого установлены оправы 3 с оптическими компонентами, с заданной скоростью и, соответственно, ввод оптического компонента в тракт. При подаче сигналов на катушки 10, установленные на стержнях, происходит их взаимодействие с постоянными магнитами 8, в результате чего осуществляется приведение во вращательное движение внутреннего кольца 6. По окончанию поступления заданного количества импульсов достигается требуемое положение внутреннего кольца бив оптический тракт вводится требуемый оптический компонент. Магнитное поле постоянных магнитов 8 внутреннего кольца 6 взаимодействует с формируемым катушками 10 вращающимся магнитным полем статора, в результате чего создается вращающий момент.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения оптического компонента в оправе | 2022 |
|
RU2787254C1 |
| ЭЛЕКТРОМАШИНА | 2013 |
|
RU2542327C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА-КОНСТРУКЦИЯ С ФОРМОВАНИЕМ ПОВЕРХ | 2011 |
|
RU2551844C2 |
| ЭЛЕКТРОШПИНДЕЛЬ | 2013 |
|
RU2528420C1 |
| ЭЛЕКТРОМАШИНА | 2011 |
|
RU2489788C2 |
| Электромашина | 2017 |
|
RU2660821C1 |
| ЭЛЕКТРОМАШИНА | 2011 |
|
RU2474945C2 |
| ЭЛЕКТРОМАШИНА | 2011 |
|
RU2477916C2 |
| ЭЛЕКТРОМАШИНА | 2013 |
|
RU2523029C1 |
| ВЕРТИКАЛЬНО-ОСЕВАЯ ВЕТРОУСТАНОВКА | 2014 |
|
RU2562344C1 |
Изобретение относится к области оптики, а именно к средствам ввода оптических компонентов в оптический тракт, и может быть использовано в объективах. Устройство для ввода оптического компонента в оптический тракт содержит корпус, оправу с оптическим компонентом. С корпусом совмещен статор электродвигателя. При этом пакет статора выполнен с сердечниками, на которых установлены образующие фазы катушки. Ротор выполнен на основе роликового подшипника с наружным кольцом, жестко связанным с корпусом. Внутреннее кольцо роликового подшипника выполнено с возможностью совершения вращательного движения и снабжено постоянными магнитами на его внутренней цилиндрической поверхности. Внутреннее кольцо жестко соединено своей внешней плоской кольцевой поверхностью с диском, в котором выполнены отверстия для установки в каждом оправы с оптическим компонентом. Технический результат выражается в повышении надежности, снижении вероятности выхода из строя устройства и в увеличении срока эксплуатации, а также в повышении быстродействия устройства. 3 з.п. ф-лы, 6 ил.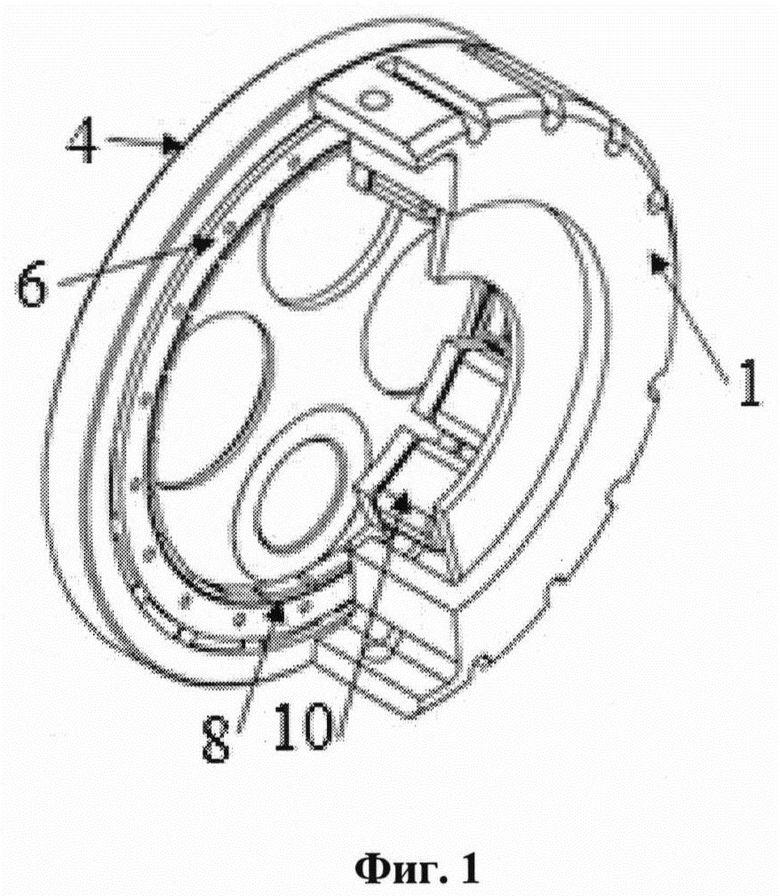
1. Устройство для ввода оптического компонента в оптический тракт, содержащее корпус, оправу с оптическим компонентом, отличающееся тем, что с корпусом совмещен статор электродвигателя, при этом пакет статора выполнен с сердечниками, на которых установлены образующие фазы катушки, ротор выполнен на основе роликового подшипника с наружным кольцом, жестко связанным с корпусом, с внутренним кольцом, выполненным с возможностью совершения вращательного движения, снабженным постоянными магнитами на его внутренней цилиндрической поверхности, с реализацией возможности воздействия магнитного поля на проводник катушек, внутреннее кольцо жестко соединено своей внешней плоской кольцевой поверхностью с диском, в котором выполнены отверстия для установки в каждом оправы с оптическим компонентом.
2. Устройство по п. 1, отличающееся тем, что ротор выполнен на основе роликового подшипника, а именно цилиндрического однорядного радиального роликового подшипника, внутреннее кольцо роликового подшипника реализовано однобортным внутренним кольцом с плоским упорным кольцом, при этом оно жестко соединено своей внешней плоской кольцевой поверхностью, которая снабжена бортом, с диском, а плоское упорное кольцо, выполненное с возможностью прижима, расположено со стороны другой плоской кольцевой поверхности внутреннего кольца, обращенной к статору, между внешним и внутренним кольцами роликового подшипника расположены ролики, каждый из роликов отделен от ближайшего соседнего ролика сепаратором из фторопласта, постоянные магниты на внутренней цилиндрической поверхности внутреннего кольца наклеены в количестве 24 штук, при этом между магнитами и катушками сформирован в радиальном направлении зазор.
3. Устройство по п. 1, отличающееся тем, что пакет статора, выполненный с сердечниками, на которых установлены катушки, образующие фазы, реализован в составе двух идентичных раздельных частей, в отношении каждой части реализовано по два сердечника, каждый из сердечников реализован в виде стержня, расположенного параллельно относительно поверхности пакета статора с зазором в радиальном направлении, величина которого достаточна для установки на сердечник катушки и для совершения вращательного движения внутренним кольцом роликового подшипника, на основе которого выполнен ротор, на сердечниках одной части пакета статора установлены две катушки, соединенные последовательно с образованием одной фазы, а на сердечниках второй части пакета статора установлены другие две катушки, соединенные последовательно с образованием второй фазы.
4. Устройство по п. 1, отличающееся тем, что в диске выполнены четыре отверстия для установки в каждом оправы с оптическим компонентом.
| US 6017155 A, 25.01.2000 | |||
| JP 2014207799 A, 30.10.2014 | |||
| JPH 04222445 A, 12.08.1992. |

