Изобретение относится к области метеорологии и физики атмосферы и может быть использовано при создании систем контроля интенсивности оптической турбулентности на вертикальных трассах и для поддержки работы адаптивных оптических систем астрономических телескопов или систем слежения за воздушно-космическим пространством. Основным параметром, характеризующим интенсивность оптической турбулентности в атмосфере, является структурная характеристика показателя преломления Cn2.
Известен акустический способ определения структурной характеристики температуры CT2, из которой можно определить Cn2. Акустический способ основан на пульсационных измерениях скорости ветра и температуры в атмосфере с помощью бистатического содара, работающего на явлении рассеяния акустических волн атмосферными мелкомасштабными турбулентными неоднородностями (В.Ф. Крамар и др. Бистатический содар для исследования полей ветра и характеристик турбулентности в приземном и пограничном слоях атмосферы, патент RU 2735909 C1). Недостатками способа являются небольшая дальность зондирования в несколько сотен метров.
Известен способ анализа дифференциальных дрожаний двух или четырех изображений звезды (DIMM - Differential Image Motion Monitor), построенных на одном объективе (Sarazin M., Roddier F. The ESO differential image motion monitor // Astron. Astrophys. 1990. V. 227, N 1. P. 294-300). Недостатком способа является отсутствие возможности получения вертикального распределения характеристики Cn2, т.к. способ DIMM является интегральным.
Известен усовершенствованный способ MASS-DIMM (MASS - Multi Aperture Scintillation Sensor), в котором DIMM прибор дополняется кольцевыми апертурами для измерения вертикального распределения характеристики Cn2 (Kornilov V., Tokovinin A., Vozyakova O., Zaitsev A., Shatsky N., Potanin S., Sarazin M. MASS: a monitor of the vertical turbulence distribution // Proc. SPIE. 2003. V. 4839. P. 837-845). Недостатком способа является низкое пространственное разрешение и нечувствительность к турбулентному слою вблизи поверхности земли.
Известен способ определения высотного профиля Cn2(z) методом триангуляции, когда производится измерение корреляции интенсивности мерцаний двух звезд с известным угловым расстоянием между ними (SCIDAR - SCIntillation Detection and Ranging). В способе SCIDAR анализируется кросскорреляционная функция двойной звезды (Vernin J., Roddier F. Experimental determination of two-dimensional spatiotemporal power spectra of stellar light scintillation Evidence for a multilayer structure of the air turbulence in the upper troposphere // J. Opt. Soc. Am. 1973. V. 63. P. 270-273). Недостатком способа является необходимость использования большого телескопа (не менее 1,5 м) и трудности с нахождением двойных звезд с большим угловым разносом и требуемой яркостью.
Известен способ определения высотного профиля Cn2(z) методом триангуляции, когда по двойной звезде производится измерение кросскорреляционной функции наклонов волнового фронта (SLODAR - SLOpe Detection And Ranging) с помощью датчика Шэка-Гартмана (Wilson R.W. SLODAR: measuring optical turbulence altitude with a Shack-Hartmann wavefront sensor // Mon. Not. R. Astron. Soc. 2002. V. 337, Iss. 1. P. 103-108). Недостатком способа также является необходимость использования большого телескопа (не менее 1,5 м) и трудности с нахождением двойных звезд с большим угловым разносом и требуемой яркостью.
Наиболее близким по технической сущности к предлагаемому изобретению является лидарный способ дистанционного измерения интенсивности оптической турбулентности, в котором дифференциальный способ DIMM сочетается с использованием лазерной опорной звезды (Gimmestad G.G., Roberts D.W., Stewart J.M., Wood J.W. Development of a lidar technique for profiling optical turbulence // Opt. Engin. 2012. V. 51, N 10. P. 101713-1-101713-18). Прототип работает следующим образом. Излучение импульсного лазера фокусируется на заданной высоте с помощью телескопа передатчика лидара, создавая яркую искусственную звезду. Приемная система лидара одновременно регистрирует четыре изображения звезды с помощью маски, расположенной перед приемным телескопом. Благодаря турбулентности, изображения во времени смещаются относительно друг друга. Регистрируя и анализируя временные ряды относительных перемещений звезды, можно оценить интенсивность оптической турбулентности в атмосфере. Недостатками способа являются небольшая дальность зондирования (менее 2 км) и низкая оперативность из-за необходимости перемещения искусственной звезды по высоте для получения профиля структурной характеристики показателя преломления Cn2.
Техническим результатом предлагаемого изобретения является дистанционное оперативное определение вертикального профиля структурной характеристики показателя преломления Cn2 непосредственно от поверхности земли.
Технический результат способа достигается с помощью специализированного турбулентного лидара, работающего на эффекте усиления обратного рассеяния, и плоского поворотного зеркала. Зондирование атмосферы лидаром осуществляется следующим образом. Лидарная трасса зондирования организована так, что вначале лазерный пучок распространяется параллельно поверхности земли на расстояние, равное слепой зоне лидара (≈1 км), а затем поворотным плоским зеркалом пучок направляется вертикально вверх. Передатчик лидара посылает в атмосферу лазерные импульсы и принимает эхосигналы. Эхосигналы основного и дополнительного приемных каналов регистрируются фотоприемниками в режиме счета фотонов, затем в виде электрических одноэлектронных импульсов поступают в систему регистрации, где они накапливаются. Затем накопленные эхосигналы передаются в компьютер, где они обрабатываются (Разенков И.А. Оценка интенсивности турбулентности из лидарных данных. // Оптика атмосферы и океана. 2020. Т. 33. № 01. С. 32-40. DOI: 10.15372/AOO20200104). Результатом работы системы является информация о высотном распределении интенсивности оптической турбулентности.
Особенность способа заключается в том, что впервые для дистанционного контроля интенсивности турбулентности используется система, работающая на эффекте усиления обратного рассеяния. Эффект усиления обратного рассеяния возникает при двойном (прямом и обратном) распространении оптического излучения в турбулентной атмосфере (Виноградов А.Г., Гурвич А.С., Кашкаров С.С., Кравцов Ю.А., Татарский В.И. «Закономерность увеличения обратного рассеяния волн». Свидетельство на открытие № 359. Приоритет открытия: 25 августа 1972 г. в части теоретического обоснования и 12 августа 1976 г. в части экспериментального доказательства закономерности. Государственный реестр открытий СССР // Бюл. изобретений. 1989. № 21). Аналоги работают на других принципах и эффект усиления обратного рассеяния не используют. В отличие от аналогов, преимущества системы заключаются в способности контролировать интенсивность турбулентности с высоким пространственным разрешением непосредственно от поверхности земли.
В способе применяется турбулентный лидар [RU 165087 U1, 2014; RU 177661 U1, 2017], трасса зондирования которого состоит из горизонтального участка и вертикального участка.
Контроль интенсивности турбулентности в атмосфере осуществляется приемо-передатчиком, блоком регистрации эхо-сигналов и блоком обработки информации. Трасса зондирования лидара имеет горизонтальный (≈1 км) участок и вертикальный (>10 км). Лидаром с пространственным разрешением 15 м производится зондирование атмосферы в вертикальном направлении. Принимаемые приемо-передатчиком эхосигналы в виде фотоэлектрических импульсов поступают в блок регистрации, где они анализируются дискриминатором, затем прошедшие дискриминатор фотоэлектрические импульсы преобразуются в сигналы стандартного TTL-уровня. Сигналы TTL-уровня поступают на счетчик фотонов, который производит накопление сигналов вдоль всей трассы зондирования. Накопленная информация о пространственном распределении эхосигналов основного P1(z) и дополнительного P2(z) приемных каналов, где z - дистанция от лидара, из блока регистрации передается в блок обработки информации. Время накопления эхосигналов в каждом цикле измерений составляет 1 мин. В блоке обработки вычисляют фактор q(z) влияния турбулентности на среднюю мощность рассеянного света на приемнике согласно алгоритму:  . Вычисляют структурную характеристику коэффициента преломления согласно алгоритму:
. Вычисляют структурную характеристику коэффициента преломления согласно алгоритму:  , где: R - радиус приемо-передающей апертуры лидара;
, где: R - радиус приемо-передающей апертуры лидара;  - волновое число; λ - длина волны;
- волновое число; λ - длина волны;  - масштаб Френеля.
- масштаб Френеля.
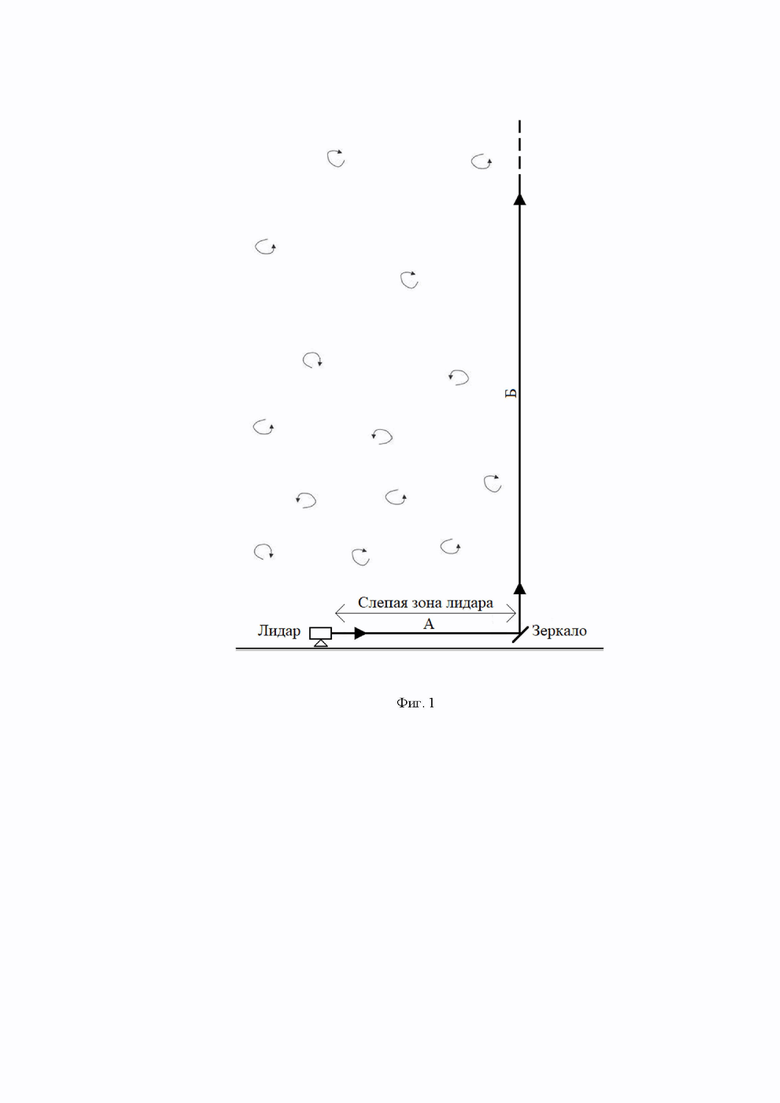
Краткое описание чертежей. На фиг. 1 показана схема зондирования. Трасса зондирования имеет горизонтальный участок А и вертикальный участок Б. Поворот луча вверх осуществляется поворотным зеркалом. Слепая зона лидара показывает минимальное расстояние, начиная с которого турбулентный лидар способен дать информацию о структурной характеристике Cn2. Горизонтальный участок А выбирается равным слепой зоне лидара. У поверхности земли интенсивность атмосферной турбулентности максимальная. На вертикальном участке Б интенсивность атмосферной турбулентности быстро убывает с высотой.
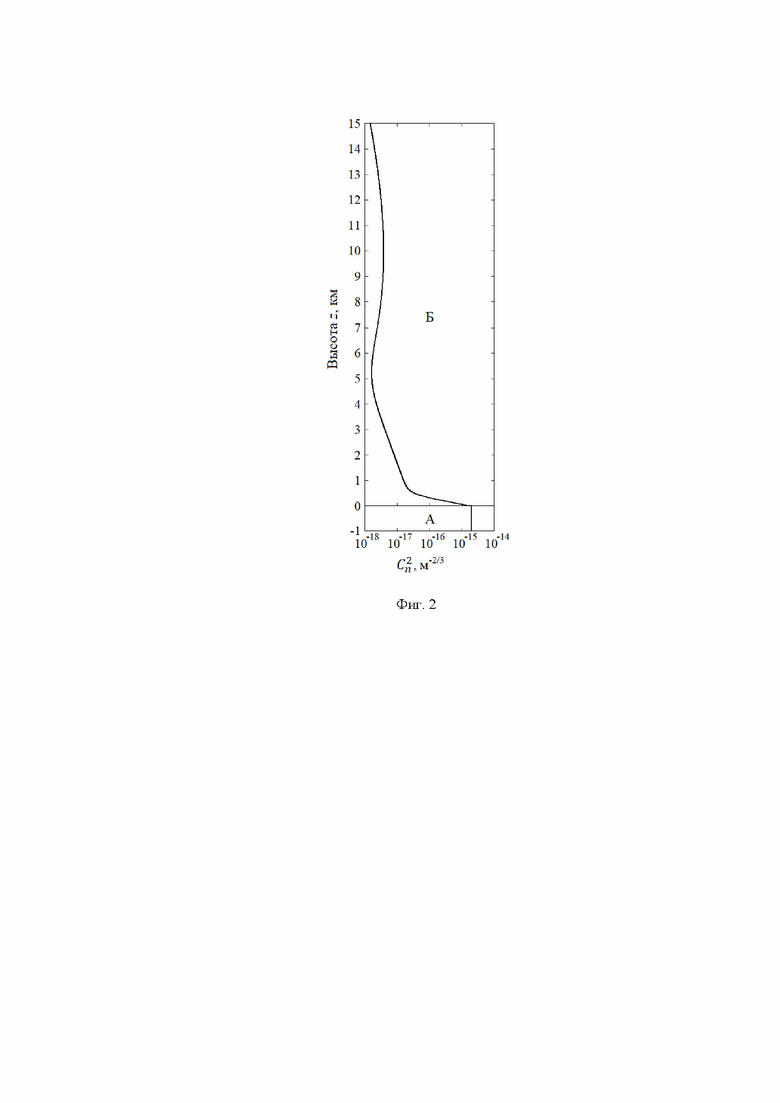
На фиг. 2 представлена аналитическая модель Хафнагеля-Волли профиля структурной характеристики оптической турбулентности Cn2 для ночного времени (Parenti R.R., Sasiela R.J. Laser-guide-star for astronomical application // J. Opt. Soc. Amer. A. 1994. V. 11, N 1. P. 288-309). Высотный профиль характеристики Cn2(z) на фиг. 2 вычислен согласно алгоритму  , где z - высота.
, где z - высота.
На фиг. 3 показан фактор q(z), рассчитанный из отношения лидарных эхосигналов. Кривая 1 соответствует схеме зондирования на фиг. 1, включающей горизонтальный участок А и вертикальный участок Б. Кривая 2 соответствует схеме зондирования в отсутствие горизонтального участка А.
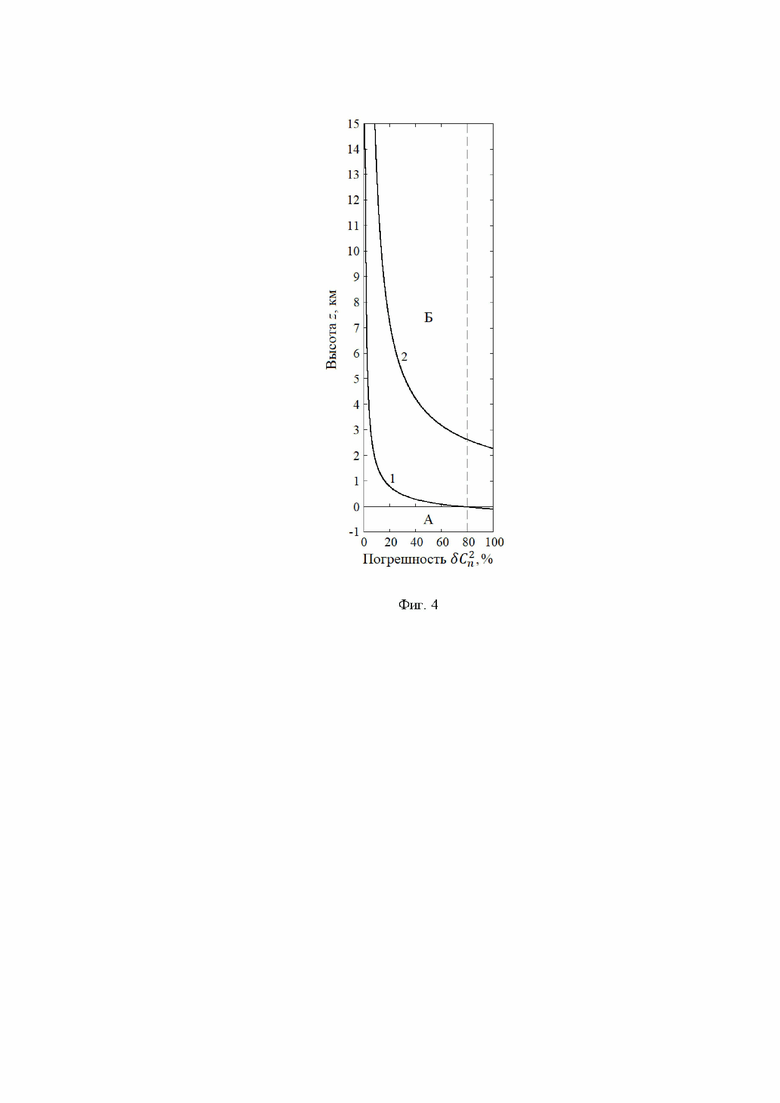
На фиг. 4 представлена относительная погрешность определения характеристики Cn2 при условии, что экспериментальная абсолютная погрешность определения фактора q(z) составляет 0,05. Кривая 1 соответствует схеме зондирования на фиг. 1, включающей горизонтальный участок А и вертикальный участок Б. Кривая 2 соответствует схеме зондирования в отсутствие горизонтального участка А.
Осуществление изобретения. Принцип работы турбулентного лидара основан на эффекте увеличения обратного рассеяния (УОР). Сравним два варианта вертикального зондирования. На фиг. 1 показана схема зондирования турбулентным лидаром интенсивности оптической турбулентности, а именно, структурной характеристики показателя преломления Cn2. Обычно используется схема зондирования, когда трасса направлена вертикально вверх. Схема зондирования на фиг. 1 отличается тем, что, она имеет горизонтальный участок А и вертикальный участок Б. Эффект УОР возникает при распространении света в турбулентной атмосфере. На фиг. 2 показан высотный профиль интенсивности оптической турбулентности Cn2. Лазерный пучок распространяется в атмосфере, при этом на молекулах и аэрозольных частицах происходит рассеяние света, поэтому часть излучения возвращается обратно. Эффект УОР - увеличение обратного рассеяния - не меняет общую рассеянную мощность, а только перераспределяет ее в пространстве таким образом, что при обратном рассеянии на оси зондирующего пучка происходит увеличение эхосигнала. Увеличение эхосигнала с расстоянием происходит в зависимости от относительной дисперсии флуктуаций интенсивности, которую вычисляется согласно алгоритму (формула Рытова)  , где k0=2π/λ - волновое число; λ - длина волны. Из этой формулы следует, что по мере удаления от лидара дисперсия β2 растет. Лидар регистрирует два эхосигнала: основной P1(z), на который турбулентность влияет, и дополнительный P2(z), на который турбулентность не влияет. Из отношения эхосигналов рассчитывается лидарная функция согласно алгоритму , показанная. Фактор q(z) увеличивается от нуля и с высотой растет медленно. На фиг. 3 функция q(z) для схемы зондирования, включающей горизонтальный участок А и вертикальный участок Б (фиг. 1) показана кривой 1. Кривая 2 соответствует схеме зондирования в отсутствие горизонтального участка А. Рост кривой 1 происходит значительно быстрее кривой 2, т.к. в этом случае имеется горизонтальный участок трассы А у поверхности земли, где интенсивность турбулентности максимальная. Согласно схеме зондирования, показанной на фиг. 1, горизонтальный участок А равен слепой зоне лидара, поэтому информация о профиле Cn2 может быть получена непосредственно от поверхности земли (z=0). Высотный профиль характеристики Cn2(z) рассчитывается из профиля фактора q(z), поэтому относительная погрешность определения δCn2(z) определяется относительной погрешностью δq(z). Полагая, что абсолютное значение q(z) при измерениях определяется с абсолютной погрешностью 0,05, рассчитаем относительную погрешность определения δCn2(z) согласно алгоритму: δCn2(z)=[0,05/ q(z)]×100%. Результаты расчета представлены на фиг. 4, пунктиром показан уровень погрешности 80%. Для схемы зондирования, включающей горизонтальный участок А и вертикальный участок Б (фиг. 1) погрешность менее 80% имеет место, начиная от поверхности земли. В отсутствие горизонтального участка А трассы зондирования А погрешность менее 80% будет иметь место, начиная с высоты 2,6 км. С увеличением высоты ошибка параметра Cn2 уменьшается.
, где k0=2π/λ - волновое число; λ - длина волны. Из этой формулы следует, что по мере удаления от лидара дисперсия β2 растет. Лидар регистрирует два эхосигнала: основной P1(z), на который турбулентность влияет, и дополнительный P2(z), на который турбулентность не влияет. Из отношения эхосигналов рассчитывается лидарная функция согласно алгоритму , показанная. Фактор q(z) увеличивается от нуля и с высотой растет медленно. На фиг. 3 функция q(z) для схемы зондирования, включающей горизонтальный участок А и вертикальный участок Б (фиг. 1) показана кривой 1. Кривая 2 соответствует схеме зондирования в отсутствие горизонтального участка А. Рост кривой 1 происходит значительно быстрее кривой 2, т.к. в этом случае имеется горизонтальный участок трассы А у поверхности земли, где интенсивность турбулентности максимальная. Согласно схеме зондирования, показанной на фиг. 1, горизонтальный участок А равен слепой зоне лидара, поэтому информация о профиле Cn2 может быть получена непосредственно от поверхности земли (z=0). Высотный профиль характеристики Cn2(z) рассчитывается из профиля фактора q(z), поэтому относительная погрешность определения δCn2(z) определяется относительной погрешностью δq(z). Полагая, что абсолютное значение q(z) при измерениях определяется с абсолютной погрешностью 0,05, рассчитаем относительную погрешность определения δCn2(z) согласно алгоритму: δCn2(z)=[0,05/ q(z)]×100%. Результаты расчета представлены на фиг. 4, пунктиром показан уровень погрешности 80%. Для схемы зондирования, включающей горизонтальный участок А и вертикальный участок Б (фиг. 1) погрешность менее 80% имеет место, начиная от поверхности земли. В отсутствие горизонтального участка А трассы зондирования А погрешность менее 80% будет иметь место, начиная с высоты 2,6 км. С увеличением высоты ошибка параметра Cn2 уменьшается.
Предлагаемое изобретение позволит повысить точность и надежность контроля интенсивности оптической турбулентности в вертикальном направлении и обеспечить работу адаптивных оптических систем астрономических телескопов или систем слежения за воздушно-космическим пространством.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения вертикального профиля интенсивности оптической турбулентности в атмосфере | 2022 |
|
RU2790930C1 |
| Способ и лидарная система для оперативного обнаружения турбулентности в ясном небе с борта воздушного судна | 2023 |
|
RU2798694C1 |
| Способ и лидарная система для оперативного контроля интенсивности турбулентности на глиссаде | 2021 |
|
RU2769090C1 |
| Дистанционный способ определения интенсивности ветровой, температурной и оптической турбулентности | 2022 |
|
RU2797644C1 |
| Мобильный лидар для зондирования атмосферного озона на наклонных и горизонтальных трассах | 2023 |
|
RU2803518C1 |
| Способ обнаружения локальных очагов горения | 2024 |
|
RU2835391C1 |
| Устройство для зондирования атмосферного озона на наклонных и горизонтальных трассах с адаптивной системой ВКР-преобразования | 2024 |
|
RU2839559C1 |
| Способ и лидарная система для обнаружения ориентированных ледяных кристаллов в атмосфере | 2023 |
|
RU2813096C1 |
| СПОСОБ ИССЛЕДОВАНИЯ АТМОСФЕРНОЙ ТУРБУЛЕНТНОСТИ ПО АНАЛИЗУ МЕРЦАНИЯ ЗВЕЗД И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2022 |
|
RU2805129C1 |
| Комбинированный лидар | 2020 |
|
RU2738588C1 |

Изобретение относится к области метеорологии и физики атмосферы и может быть использовано для определения вертикального профиля интенсивности оптической турбулентности в атмосфере. Сущность: выполняют зондирование атмосферы лидаром, работающим на эффекте усиления обратного рассеяния. Вначале лазерный пучок распространяют параллельно поверхности земли на расстояние, равное слепой зоне лидара. Затем поворотным плоским зеркалом направляют пучок вертикально вверх. При этом с помощью приемо-передатчика лидара посылают в атмосферу лазерные импульсы и принимают эхосигналы основного и дополнительного приемных каналов, которые регистрируются в режиме счета фотонов. Зарегистрированные эхосигналы в виде электрических одноэлектронных импульсов поступают в систему регистрации, где они накапливаются и передаются в компьютер для обработки информации о высотном распределении интенсивности оптической турбулентности. Технический результат: оперативное определение вертикального профиля интенсивности оптической турбулентности в атмосфере непосредственно от поверхности земли. 4 ил.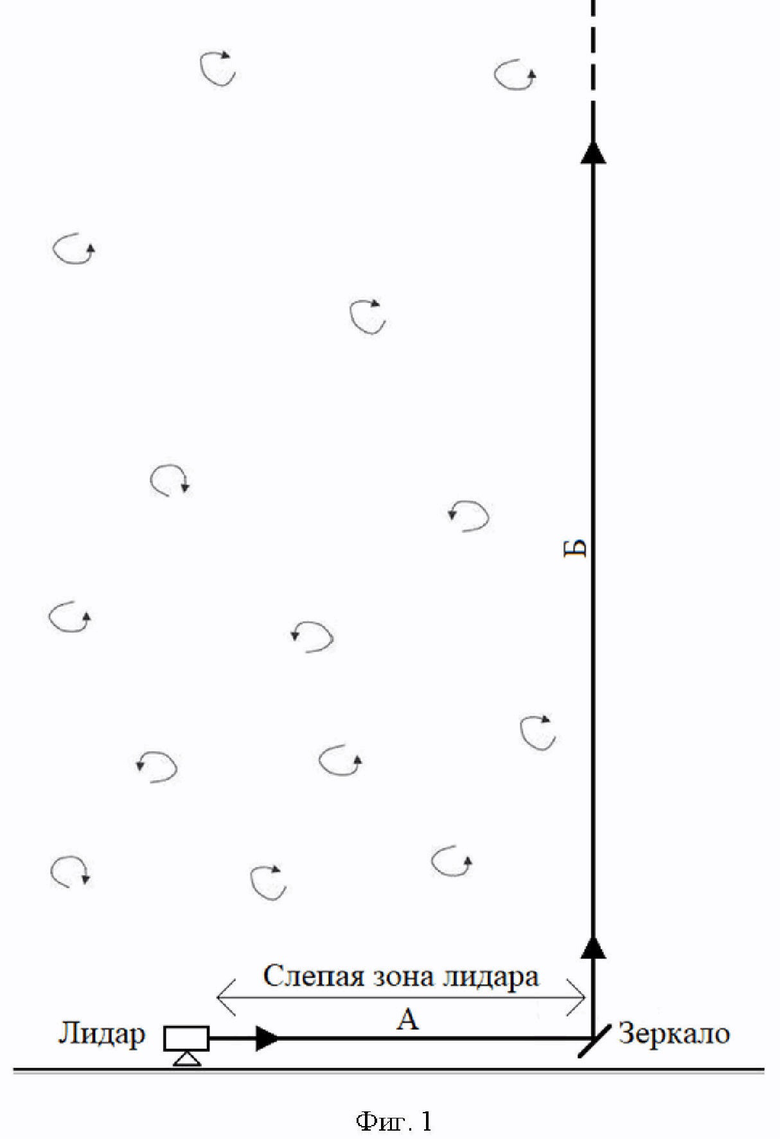
Способ определения вертикального профиля интенсивности оптической турбулентности в атмосфере, осуществляемый лидаром, работающим на эффекте усиления обратного рассеяния, который производит зондирование атмосферы, при этом вначале лазерный пучок распространяется параллельно поверхности земли на расстояние, равное слепой зоне лидара, а затем поворотным плоским зеркалом пучок направляется вертикально вверх, приемо-передатчик лидара посылает в атмосферу лазерные импульсы и принимает эхосигналы основного и дополнительного приемных каналов, которые регистрируются фотоприемниками в режиме счета фотонов, затем в виде электрических одноэлектронных импульсов поступают в систему регистрации, где они накапливаются и передаются в компьютер для обработки информации о высотном распределении интенсивности оптической турбулентности.
| G.G.Gimmestad et al | |||
| Development of a lidar technique for profiling optical turbulence / Optical Engineering, 2012, V.51 (10), P.101713-1-101713-18 | |||
| И.А.Разенков | |||
| Оценка интенсивности турбулентности из лидарных данных / Оптика атмосферы и океана, 2020, т.33, N1, стр.32-40 | |||
| И.А.Разенков | |||
| Перспективы применения турбулентного УОР-лидара для |

