Изобретение относится к оптическому приборостроению и может быть использовано в схемах лазерных локаторов для дистанционного зондирования атмосферного аэрозоля и атмосферной турбулентности.
Описание аэрозольного лидара дано в работе Разенкова И.А., «Аэрозольный лидар для непрерывных атмосферных наблюдений», Оптика атмосферы и океана, 2013, Т. 26, № 1, С. 52–63. Этот лидар относится к классу микроимпульсных лазерных систем, в которых передающий и принимающий каналы точно совмещены и приём осуществляется через передающий телескоп. Преимущество таких систем заключается в их высокой термомеханической стабильности, когда при изменении температуры лидара не происходит существенного смещения оптических осей относительно друг друга. Кроме того, такие системы работают в режиме счёта фотонов, поэтому динамический диапазон регистрируемых эхосигналов ограничен только временем накопления. Наиболее близким к заявленному устройству является [RU 165087 U1, 2016] устройство для регистрации усиления обратного рассеяния (УОР) в атмосфере, обладающего афокальным приёмопередающим телескопом, в котором с помощью антенного переключателя, состоящего из тонкоплёночного поляризатора и четвертьволновой пластинки, которые позволяют всю мощность лазерного пучка отправить в атмосферу и зарегистрировать всё пришедшее обратно из атмосферы излучение. Устройство позволяет производить регистрацию точно на оси лазерного пучка и вне оси пучка одновременно из одного зондируемого объёма в атмосфере. Недостатком данной полезной модели является ограниченность в применении, т.к. решается одна единственная задача оценивания интенсивности турбулентности, и при этом имеет место крайне неэффективное использование приёмопередающего телескопа, площадь которого задействована менее чем на 40%.
Техническим результатом заявляемого изобретения является создание конструкции, где передача и приём осуществляются через один телескоп, который одновременно и расширяет лазерный пучок и кратно понижает ошибку рассогласования между оптическими осями передатчика и приёмника.
Поставленная задача решается с помощью дополнения в аэрозольный лидар парой перемещаемых диафрагм, одна из которых располагается в передатчике, а другая – в приёмнике. Когда обе диафрагмы убраны и находятся вне зондирующего лазерного пучка и вне приходящих пучков рассеянного излучения из атмосферы, тогда конструкция представляет собой обычный микроимпульсный аэрозольный лидар. В этом случае происходит полное заполнение приёмопередающего телескопа лазерным излучением передатчика и полное использование всей поверхности телескопа при приёме излучения, рассеянного в атмосфере. Это режим работы устройства именуемый «аэрозольный лидар». Когда обе диафрагмы задвинуты и одна находится внутри зондирующего лазерного пучка, а другая внутри приходящих пучков рассеянного излучения из атмосферы, тогда конструкция представляет собой микроимпульсный турбулентный лидар, работающий на эффекте усиления обратного рассеяния (УОР). В этом случае первая диафрагма ограничивает лазерный пучок, формируя на одной стороне приёмопередающего телескопа зондирующий луч, а вторая диафрагма с парой одинаковых отверстий формирует в приёмнике два поля зрения симметрично относительно центра телескопа таким образом, что одно из них точно совпадает с зондирующим пучком. В этом случае имеем режим работы устройства именуемый «турбулентный лидар».
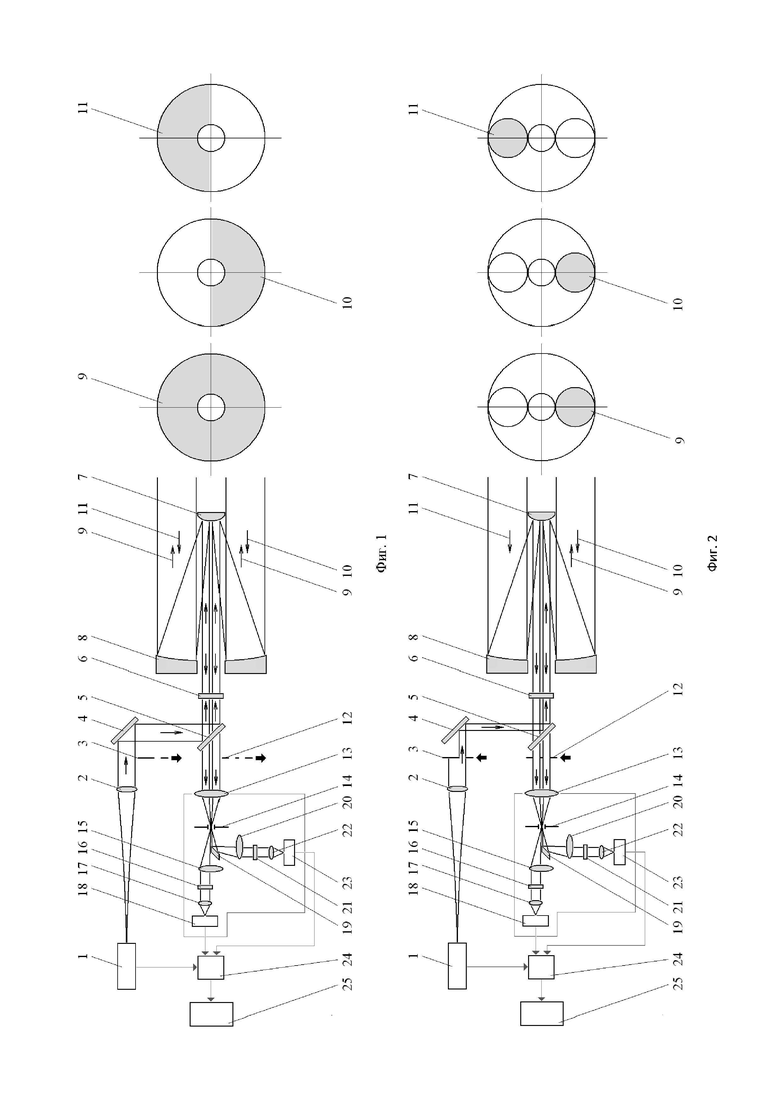
На фиг. 1 схематично изображено устройство в режиме «аэрозольный лидар», когда обе диафрагмы 3 и 12 убраны. На фиг. 2 схематично изображено устройство в режиме «турбулентный лидар», когда обе диафрагмы 3 и 12 задвинуты. Фиг. 1 и фиг. 2 включают подробную оптическую схему устройства, показывают расположение пучков на выходной апертуре телескопа и схематично изображают электронную часть. Вертикальными чёрными стрелками на фиг. 1 и фиг. 2 обозначены механические привода, которые убирают или задвигают диафрагмы 3 и 12.
Устройство состоит из передающей и приёмной частей. Передающая часть одноканальная, а принимающая – двухканальная. На фиг. 1 (режим «аэрозольный лидар») передающий канал заполняет весь телескоп, а приёмные каналы 10 (нижний) и 11 (верхний) идентичны и каждый принимает половину приходящего из атмосферы излучения, На фиг. 2 (режим «турбулентный лидар») приёмный канал 10 (нижний) является осевым и совпадает с передающим каналом 9, а второй принимающий канал 11 (верхний) является внеосевым. Общими для передатчика и всех приёмных каналов являются тонкоплёночный поляризатор 5, четвертьволновая пластинка 6 и афокальный приёмопередающий телескоп, состоящий из зеркал 7 и 8. Лазерные приёмопередатчики (лидары) с общим телескопом называют «системами с расширением лазерного пучка через приёмный телескоп» и характеризуют как системы с повышенной термомеханической стабильностью. Передатчик состоит из лазера 1, коллимирующей линзы 2, поворотного зеркала 4, тонкоплёночного поляризатора 5, четвертьволновой пластинки 6 и двух зеркального афокального телескопа 7-8. Излучение 9 лазера 1 линейно поляризованное с плоскостью поляризации, перпендикулярной рисунку на фиг. 1 и фиг. 2. После четвертьволновой пластинки 6 излучение 9 имеет круговую поляризацию. Между линзой 2 и зеркалом 4 в режиме работы «турбулентный лидар» (фиг. 2) устанавливается диафрагма 3, формирующая узкий зондирующий пучок. В режиме работы «аэрозольный лидар» (фиг. 1) диафрагма 3 удаляется наружу из лазерного пучка и тогда формируется широкий зондирующий пучок 9. Узкий или широкий лазерный пучок 9 после телескопа 7-8 уходит в атмосферу, а возвращаются обратно пучки 10 (нижний, осевой) и 11 (верхний, внеосевой). Далее принимаемые пучки 10 и 11 проходят сквозь четвертьволновую пластинку 6, при этом поляризация излучения вновь становится линейной с плоскостью поляризации, совпадающей с рисунком на фиг. 1 и фиг. 2. Затем оба пучка 10 и 11 проходят сквозь тонкоплёночный поляризатор 5 и поступают на формирователь поля зрения приёмной системы, состоящий из двойной диафрагмы 12, фокусирующей линзы 13 и апертурной диафрагмы 14. Пучок 10 проходит прямо через коллимирующую линзу 15 на интерференционный фильтр 16, отсекающий фоновую засветку. Далее стоит фокусирующая линза 17 и детектор 18. Пучок 11 отражается от плоского зеркала 19, имеющего прямоугольную форму и скошенный край. Далее пучок проходит через, коллимирующую линзу 20, интерференционный фильтр 21, фокусирующую линзу 22 на детектор 23.
Устройство работает следующим образом. Во время работы короткий световой импульс от лазера 1 проходит через линзу 2 и диафрагму 3, если устройство работает в режиме «турбулентный» лидар, затем направляется зеркалом 4 на тонкоплёночный поляризатор 5 и четвертьволновую пластинку 6, являющиеся антенным переключателем. Поляризатор 5 отражает световой импульс и направляет его через четвертьволновую пластинку 6, которая преобразует линейную поляризацию излучения лазера в круговую поляризацию. Затем излучение приходит на зеркальный афокальный телескоп 7-8, расширяющий пучок 9 и направляющий его в атмосферу. Обратно рассеянное излучение приходит на телескоп 8-7. Пучок 10 приходит на нижнюю часть телескопа, а пучок 11 на верхнюю. В режиме «турбулентный лидар», когда установлены диафрагмы 3 и 12, на нижнюю приёмную апертуру приходит рассеянное излучение 10, которое дважды прошло через одни и те же турбулентные неоднородности и это излучение формирует эхосигнал осевого приёмного канала, на который воздействует атмосферная турбулентность. На верхнюю приёмную апертуру приходит рассеянное излучение 11, которое в атмосферу и обратно прошло разными путями, и это эхосигнал внеосевого приёмного канала, на который атмосферная турбулентность влияния не оказывает. Согласно эффекту усиления обратного рассеяния, открытому в 1973 году Виноградовым, Кравцовым и Татарским, рассеянное назад излучение на оси пучка должно превышать излучение вне оси пучка. Вне зависимости от режима работы пучки 10 и 11 проходят через телескоп 8-7, четвертьволновую пластинку 6 и сквозь тонкоплёночный поляризатор 5. Приходящее из атмосферы излучение 10 и 11 имеет круговую поляризацию. После второго прохождения через четвертьволновую пластинку 6 излучение вновь становится линейно поляризованным, но при этом плоскость поляризации поворачивается на 90°. Поэтому пучки 10 и 11 беспрепятственно проходит через тонкоплёночный поляризатор 5. Далее пучки поступают в приёмный ящик через двойную диафрагму 12, если она установлена (режим «турбулентный лидар»), фокусирующую линзу 13, в фокусе которой располагается апертурная диафрагма 14, которая определяет равные поля зрения для обоих каналов. После диафрагмы 14 пучок нижнего (осевого) канала 10 идёт прямо, а пучок верхнего (внеосевого) канала 11 отражается зеркалом 19. Оба пучка 10 и 11 коллимируются соответственно линзами 15 и 20, проходят сквозь интерференционные фильтры 16 и 21, затем фокусируются линзами 17 и 22 на фотодетекторы 18 и 23. Электрические сигналы с детекторов 18 и 23 идут в систему регистрации 24. Кроме того, в систему регистрации 24 от лазера 1 поступает сигнал синхронизации в момент посылки зондирующего импульса в атмосферу. Система регистрации 24 производит накопление сигналов, поскольку устройство работает в режиме счёта фотонов, и затем информация в цифровом виде передаётся в компьютер 25. Компьютер 25 используется для вычисления коэффициентов обратного и полного рассеяния в режиме работы «аэрозольный лидар» и для расчёта отношения сигналов 10 и 11 и для расчёта параметров интенсивности атмосферной турбулентности в режиме работы «турбулентный лидар».
Преимущество описанного выше устройства по сравнению с аналогами заключается в его способности работать в двух режимах – режиме «аэрозольный лидар» и режиме «турбулентный лидар». Выбор режимов работы зависит от решаемой задачи. На практике, например, может быть последовательное чередование режимов, когда лидар непрерывно работает в режиме контроля за аэрозольной обстановкой, а затем, например, один раз в час оценивает турбулентную обстановку. Важно, что в режиме «аэрозольный лидар» приёмопередающий телескоп используется на 100%, при этом эхосигналы 10 и 11 должны суммироваться в компьютере 25. Для режима «турбулентный лидар» на этапе создания и настойки устройства есть возможность подбора размера диафрагм 3 и 12, чтобы найти оптимальное сочетание между чувствительностью лидара и временем накопления эхосигналов. Достоинство представленной конструкции ещё в том, что при переключении режимов работы все оптические элементы остаются на своих местах, что гарантирует сохранение настроек и стабильную работу. А возможная небольшая механическая ошибка в установке диафрагм 3 и 12 в режиме «турбулентный лидар» на результат работы не повлияет, т.к. в устройстве реализуется относительный метод измерений для компенсации возможного изменения коэффициента обратного рассеяния вдоль трассы зондирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и лидарная система для обнаружения ориентированных ледяных кристаллов в атмосфере | 2023 |
|
RU2813096C1 |
| Способ и лидарная система для оперативного обнаружения турбулентности в ясном небе с борта воздушного судна | 2023 |
|
RU2798694C1 |
| Способ определения вертикального профиля интенсивности оптической турбулентности в атмосфере | 2022 |
|
RU2789631C1 |
| КОГЕРЕНТНАЯ ЛИДАРНАЯ СИСТЕМА НА ОСНОВЕ ПОЛУПРОВОДНИКОВОГО ЛАЗЕРА И УСИЛИТЕЛЯ | 2008 |
|
RU2484500C2 |
| СПОСОБ ЛАЗЕРНОГО ЗОНДИРОВАНИЯ АТМОСФЕРНЫХ КРИСТАЛЛИЧЕСКИХ ОБРАЗОВАНИЙ | 2021 |
|
RU2772071C1 |
| ЛАЗЕРНЫЙ ДОПЛЕРОВСКИЙ ИЗМЕРИТЕЛЬ | 1999 |
|
RU2227303C2 |
| Способ определения вертикального профиля интенсивности оптической турбулентности в атмосфере | 2022 |
|
RU2790930C1 |
| ДОПЛЕРОВСКИЙ СКАНИРУЮЩИЙ ЛИДАР БОРТОВОГО БАЗИРОВАНИЯ | 2017 |
|
RU2655040C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ МИНИАТЮРНЫЙ ОПТИЧЕСКИЙ ДАТЧИК ДЛЯ ДИСТАНЦИОННОГО ОБНАРУЖЕНИЯ МИКРО- И МАКРООБЪЕКТОВ И ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК ОБНАРУЖЕННЫХ ОБЪЕКТОВ | 2020 |
|
RU2736920C1 |
| Лазерный доплеровский измеритель скорости | 1990 |
|
SU1748071A1 |
Изобретение относится к области оптического зондирования атмосферы. Комбинированный лидар содержит лазер для генерации световых импульсов, линзовый коллиматор для формирования узкого зондирующего пучка, антенный переключатель из тонкопленочного поляризатора и четвертьволновой пластинки, для точного совмещения оптических осей передающего и принимающих каналов, приемопередающий афокальный зеркальный телескоп, двойную апертурную диафрагму, формирователь угла поля зрения приемников, интерференционный светофильтр и два фотодетектора, систему регистрации и компьютер. В лидар введена пара перемещаемых диафрагм, одна из которых располагается в передатчике, а другая – в приемнике, что позволяет устройству работать в двух режимах – режиме «аэрозольный лидар» и режиме «турбулентный лидар». Технический результат заключается в создании конструкции, способной стабильно функционировать в режимах дистанционного зондирования атмосферного аэрозоля и атмосферной турбулентности. 2 ил.
Комбинированный лидар, включающий: лазер для генерации световых импульсов, линзовый коллиматор для формирования узкого зондирующего пучка, антенный переключатель из тонкопленочного поляризатора и четвертьволновой пластинки, для точного совмещения оптических осей передающего и принимающих каналов, приемопередающий афокальный зеркальный телескоп, двойную апертурную диафрагму, формирователь угла поля зрения приемников, интерференционный светофильтр и два фотодетектора, систему регистрации и компьютер, отличающийся тем, что в лидар добавлена пара перемещаемых диафрагм, одна из которых располагается в передатчике, а другая – в приемнике, позволяющих данному устройству работать в двух режимах – режиме «аэрозольный лидар» и режиме «турбулентный лидар».
| 0 |
|
SU165087A1 | |
| ДАТЧИК УСИЛИЙ | 0 |
|
SU177661A1 |
| Способ измерения скольжения многофазного асинхронного электродвигателя и устройство для его реализации | 1983 |
|
SU1137389A1 |
| WO 2011079323 A2, 30.06.2011. | |||

