Изобретение относится к области метеорологии и физики атмосферы и может быть использовано при создании авиационного оборудования летательных аппаратов для заблаговременного обнаружения турбулентности в ясном небе (ТЯН) впереди воздушного судна (ВС) с целью обеспечения безопасности полетов.
Известен пассивный способ обнаружения ТЯН с помощью радиометров, принимающих радио излучение кислорода на частоте 56,6 ГГц и находящихся на борту ВС, которые дистанционно определяют температуру воздуха под разными углами к направлению движения в вертикальной плоскости (Alasdair McPferson. Clear air turbulence detector. US patent 3 722 272, 1973), либо в горизонтальной плоскости (Benjamin R. Fow et al. Clear air turbulence advance warning and evasive course indicator using radiometer. US patent 3 359 557, 1967). Полученные с помощью радиометров значения температуры вдали от борта и измерения температуры воздуха вблизи борта ВС позволяют построить изоплеты температуры. Для обнаружения ТЯН используется предположение о сходимости изоплет в области интенсивной турбулентной зоны. Недостатком способа является низкое пространственное разрешение и низкая чувствительность при обнаружении ТЯН.
Известен пассивный способ обнаружения ТЯН с помощью сканирующего радиометра, находящегося на борту ВС. Радиометр дистанционно определяют температуру воздуха и позволяет через заранее заданные интервалы времени строить температурные карты в горизонтальной плоскости (Kenrick R. Lesliee. Apparatus and method for predicting clear air turbulence. US patent 6 237 405 B1, 2001). Из полученных температурных карт вычисляется градиент температуры и определяется число Ричардсона Ri. Для обнаружения ТЯН используется правило Майлса-Говарда (Miles J.W., Howard L.N. Note on a geterogeneous shear flow. J. Fluid. Mech., 20, 331, 1964), согласно которому в воздушном течении при 0<Ri<1/4 возникает неустойчивость Кельвина-Гельмгольца, которая генерирует турбулентность. Недостатком способа является низкое пространственное разрешение при обнаружении интенсивной турбулентной зоны и большая погрешность при определении числа Ричардсона Ri.
Известен способ автоматического обнаружения ТЯН с помощью впереди летящего ВС, которое имеет средства регистрации болтанки и передачи информации на другое ВС (Guy Deker et al. Automatic turbulence detection method. US patent 2008/0119971 A1, 2008). Недостатком способа является вероятный факт отсутствие другого впереди летящего ВС, либо отсутствие соответствующей аппаратуры на одном из ВС. Кроме того впереди летящее ВС гарантированно попадает в область ТЯН.
Известен способ обнаружения ТЯН с помощью радиоизлучения от спутников, находящихся на низких околоземных орбитах (Brian J. Tillotson. System for measuring turbulence remotely. US patent 8 174 431 B1, 2012). Для обнаружения ТЯН используется тот факт, что при пересечении турбулентных зон радиоволны меняют свои свойства (амплитуду и фазу). Способ предполагает фильтрацию и анализ радиоволн от спутников на нескольких принимающих платформах, находящихся на земле, на воде и в воздухе, включая специальную наземную станцию. Недостатком способа является сложность и невозможность полного покрытия материков и океанов для его реализации.
Известен лидарный способ обнаружения ТЯН с помощью двух лазеров и приемника (Allen R. Geiger. Clear air turbulence detection. US patent 4 359 640, 1982). В способе описаны разные варианты зондирования, причем, лазеры могут иметь разные длины волн, также могут быть как импульсными, так и непрерывными. Лазерные пучки могут быть направленными как в одну точку впереди ВС, так и в разные стороны. Здесь же в одной из схем зондирования ТЯН предполагается быстрое сканирование лучом лазера перед ВС с последующей регистрацией эхосигнала с помощью диссектора и построения двумерного изображения. Решение о наличии ТЯН принимается на основе анализа изображения, когда появляются темные пятна на однородном поле электронно-лучевого дисплея. Очевидным недостатком способа является его низкая чувствительность, как в вариантах использования непрерывных лазеров, так и в вариантах применения диссектора для регистрации эхосигналов.
Известен лидарный способ обнаружения ТЯН с помощью одночастотного лазера и приемника, состоящего из интерферометра и диссектора (Elmer H. Hara. Clear air turbulence detector. US patent 4 195 931, 1980). Лазерное излучение с узким спектром фокусируется перед ВС, затем из атмосферы рассеянное обратно излучение принимается и пропускается через интерферометр Фабри-Перо. В способе используется факт присутствия доплеровского уширения в спектре лазерного излучения, рассеянного молекулами воздуха. Интерферометр настроен таким образом, что пропускает только сигнал молекулярного рассеяния и не пропускает свет, рассеянный аэрозольными частицами. Интерферометр формирует интерференционную картину в виде концентрических колец, которая затем регистрируется диссектором. Затем полученное диссектором изображение сопоставляется с изображением в отсутствие ТЯН и принимается решение о наличии или отсутствии турбулентности. Недостатком способа является его сложность, связанная с необходимостью применения одночастотного стабилизированного лазера, поскольку даже незначительное смещение частоты лазера из-за вибраций или небольшое изменение температуры внутри прибора, полностью изменит интерференционную картину. Недостатком способа также является его низкая чувствительность, поскольку интерферометр настраивается только на молекулярное рассеяние (рассеяние Рэлея), а аэрозольное рассеяния (рассеяние Ми) при этом отсекается.
Известен и реализован на практике лидарный проект Европейского содружества FP-7 для непрямого, т.е. косвенного, обнаружения ТЯН (Henk P.J. Veerman et al. Flight testing DELICAT – a promise for medium-range clear air turbulence protection. European 46th SETP and 25th SFTE Symposium, 15-18 June 2014, Luled, Sweden). Принцип работы лидара DELICAT проекта FP-7 основан на дистанционной регистрации флуктуаций плотности воздуха посредством анализа флуктуаций молекулярного релеевского рассеяния. Способ является непрямым, поскольку основан на предположении, что флуктуации плотности воздуха должны резко возрастать только при возникновении турбулентности. Система DELICAT представляет собой упрощенный вариант лидара высокого спектрального разрешения, т.к. в нем выделяется и используется только молекулярная компонента рассеянного излучения. В лидарах высокого спектрального разрешения молекулярный эхосигнал используется для абсолютной калибровки эхосигнала аэрозольного приемного канала, поэтому такие лидары применяют для прецизионных наблюдений атмосферного аэрозоля (Razenkov I. A. et al., The design of a new airborne High Spectral Resolution Lidar, 24th International Laser Radar Conference June 23-27, 2008, Boulder, Colorado). К недостаткам лидара DELICAT можно отнести его низкую чувствительность, поскольку регистрируется только эхосигнал молекулярного рассеяния (рассеяние Рэлея) и отсекается эхосигнал аэрозольного рассеяния (рассеяние Ми). Недостатком способа, реализованного в лидаре DELICAT, являются также необходимость постоянного контроля положения лазерного пучка в пространстве, чтобы пучок постоянно располагался горизонтально, в противном случае лидар будет регистрировать изменения плотности воздуха на близких высотах. В лидаре DELICAT реализован опосредованный способ регистрации турбулентности, к тому же система получилась громоздкой и сложной в настройке и управлении.
Наиболее близким по технической сущности к предлагаемому изобретению является способ дистанционного обнаружения турбулентности с использованием доплеровского лидара (Takashi Asahara et al. Method for measuring airspeed by optical air data sensor. US patent 8 434 358 B2, 2013). Импульсы инфракрасного лазера (1550 нм) посылаются вперед в атмосферу в направлении движения ВС, в регистрируемом эхосигнале частота рассеянного обратно излучения смещается благодаря эффекту Доплера. Принимаемый эхосигнал смешивается с опорным излучением лазера, в результате чего на радиочастоте возникают биения, частота которых пропорциональна скорости движения ВС относительно воздушного течения. Японским агенством аэрокосмических исследований (JAXA) реализован на практике проект доплеровского ветрового самолетного лидара (Hamaki Inokuchi et al. High altitude turbulence detection using an airborne Doppler lidar. 29th Congress of the International Council of the Aeronautical Sciences. St.-Petersburg, Russia; September 7-12, 2014). Зондирование осуществляется по двум направлениям в вертикальной плоскости под углами + 10° и - 10° относительно направления движения ВС. Это позволяет определить вертикальную компоненту скорости воздушного потока, которая увеличивается при возникновении ТЯН. Недостатком способа с использованием доплеровского лидара являются большие габариты, вес и энергопотребление аппаратуры.
Техническим результатом предлагаемого изобретения является дистанционное оперативное обнаружение турбулентности в ясном небе (ТЯН) впереди воздушного судна.
Технический результат системы достигается тем, что система зондирует атмосферу турбулентным лидаром с борта воздушного судна в направлении полета, регистрирует два профиля эхосигналов в режиме счета фотонов, передает сигналы в электронный блок, где происходит накопление эхосигналов, вычисление характеристик турбулентности на расстоянии 10-15 км от воздушного судна и передачи полученной информации на монитор в кабину пилота. Система работает непрерывно в течение всего полета от взлета до посадки.
Окончательным результатом работы системы является заблаговременная, за 30-60 сек подлетного времени, оценка интенсивности ожидаемой болтанки воздушного судна в градациях «слабая», «умеренная» и «сильная».
Технический результат способа достигается тем, что используется специализированный турбулентный лидар, работающий на эффекте усиления обратного рассеяния, который располагается на борту воздушного судна. Зондирование атмосферы лидаром для обнаружения турбулентности в ясном небе осуществляется следующим образом.
Лидар располагается на борту воздушного судна и направление зондирования лидара должно совпадать с продольной осью воздушного судна. Лидар имеет один передающий канал и два принимающих, причем, один принимающий канал (основной) точно совмещен с передающим каналом, второй (дополнительный) принимающий канал располагается рядом под первым каналом. Приемо-передающий канал и второй принимающий канал располагаются один под другим по вертикали. Зондирующий лазерный пучок с помощью поворотного зеркала, расположенного снаружи фюзеляжа под защитным обтекателем, направляется в атмосферу в направлении полета воздушного судна. Передатчик лидара посылает в атмосферу лазерные импульсы и принимает эхосигналы. Эхосигналы основного и дополнительного приемных каналов регистрируются фотоприемниками в режиме счета фотонов, затем в виде электрических одноэлектронных импульсов поступают в электронный блок, где они накапливаются и обрабатываются. Результатом работы всей системы является информация об интенсивности ожидаемой (прогнозируемой) болтанки по курсу движения ВС в градациях «слабая», «умеренная» и «сильная» и оповещение пилота за 30-60 сек до начала вхождения в интенсивную турбулентную зону.
Особенность способа заключается в том, что впервые для дистанционного обнаружения интенсивной турбулентной зоны впереди ВС используется система, работающая на эффекте усиления обратного рассеяния. Эффект усиления обратного рассеяния возникает при двойном (прямом и обратном) распространении оптического излучения в турбулентной атмосфере по одному и тому же пути (Виноградов А.Г., Гурвич А.С., Кашкаров С.С., Кравцов Ю.А., Татарский В.И. Закономерность увеличения обратного рассеяния волн. Свидетельство на открытие № 359. Приоритет открытия: 25 августа 1972 г. в части теоретического обоснования и 12 августа 1976 г. в части экспериментального доказательства закономерности. Государственный реестр открытий СССР // Бюлл. изобретений. 1989. № 21). Аналоги работают на других принципах и эффект усиления обратного рассеяния не используют. При авариях, связанных с турбулентностью, сильные колебания воздушного судна могут привести к тому, что незакрепленные предметы и люди будут летать по салону, что может привести к травмам. Столкновения с атмосферной турбулентностью являются основной причиной травм пассажиров и летных экипажей в авиационных происшествиях без летального исхода. По статистике более 40% аварий происходит из-за турбулентности, обозначаемой как «турбулентность в ясном небе» (ТЯН), которая не может быть обнаружена никаким существующим бортовым оборудованием, включая современный метеорологический радар. Это объясняет, почему число аварий из-за турбулентности выросло в 5 раз с 1980 года, причем, рост числа происшествий происходит быстрее, чем увеличение интенсивности воздушного движения.
Помимо ТЯН, атмосферная турбулентность может возникать при заходе на посадку, что может привести к нестабильности траектории полета и жесткой посадке. Заблаговременное предупреждение о турбулентных условиях позволит экипажу воздушного судна подготовиться и таким образом исключить человеческую ошибку, как причину возможной аварии.
Достижение технического результата в предлагаемом изобретении обеспечивается за счет применения турбулентного лидара для зондирования вдоль траектории полета воздушного судна и специализированной обработке получаемой информации в реальном времени.
На фиг. 1 схематично показан принцип работы турбулентного лидара в полете. Короткий световой импульс от лазера посылается в атмосферу, а рассеянное обратно молекулами воздуха и субмикронными аэрозольными частицами излучение регистрируется фотоприемником. Время задержки между выстрелом лазера и приходом эха, например, с дистанции 15 км от ВС, составляет 100 мксек, т.е. равно времени распространения света на двойное расстояние. Максимальная дальность зондирования определяется частотой следования лазерных импульсов. Чтобы дистанция зондирования была не менее 30 км, частота импульсов лазера должна быть не более 5 кГц. Лидар состоит из приемо-передатчика и электронного блока регистрации, хранения и обработки информации. В состав турбулентного лидара входит микро импульсный ультрафиолетовый лазер с длиной волны излучения 355 нм, при этом выходящий из ВС наружу лазерный пучок безопасен для глаз. Лидар располагается внутри ВС, напротив выступающего наружу обтекателя с кварцевым оптическим окном. Внутри обтекателя находится поворотное зеркало, которое трассу зондирования направляет параллельно фюзеляжу прямо по курсу полета ВС.
На фиг. 2 представлена схема турбулентного лидара, предназначенного для дистанционного контроля интенсивности турбулентности впереди ВС во время полета. Короткие световые импульсы с линейной поляризаций, генерируемые лазером 1, коллимируются линзой 2, проходят сквозь тонко-пленочный поляризатор 3, четверть-волновую пластинку 4, расширяются афокальным телескопом 5 и в виде коллимированного пучка 18 посылаются в атмосферу. Четверть-волновая пластинка 4 линейно поляризованное излучение лазера преобразует в излучение с круговой поляризацией. Рассеянное в атмосфере излучение возвращается в виде пучков основного приемного канала 19 и дополнительного приемного канала 20. Пучки 19 и 20 сужаются, соответственно, телескопами 5 и 10, проходят сквозь четверть-волновые пластинки 4 и 11, после которых поляризация излучения вновь становится линейной, повернутой на 90° относительно поляризации лазера 1. Пучок 19 отражается от тонкопленочного поляризатора 3 и зеркалом 6 направляется на фотоприемник 9. Пучки 19 и 20 проходят сквозь узкополосный интерференционный светофильтр 7, который отсекает фоновую засветку. Кросс-поляризованная компонента эхосигналов не регистрируется: из пучка 19 она удаляется, т.к. проходит сквозь тонкопленочный поляризатор 3 и возвращается обратно в лазер 1; из пучка 20 кросс-поляризованная компонента удаляется поляризационным светоделительным кубом 12. Линзы 8 и 13 фокусируют пучки 19 и 20 на площадки фотодетекторов, соответственно, 9 и 14. В качестве фотодетекторов используются лавино-пролетные диоды. Площадки фотодетекторов 9 и 14 также играют роль диафрагм, которые ограничивают поле зрения приемника лидара. Эхосигналы основного 19 и дополнительного 20 приемных каналов регистрируются фотоприемниками 9 и 14 в режиме счета фотонов, затем в виде электрических одноэлектронных импульсов поступают в электронный блок 15. Электронный блок 15 включает в себя программируемую логическую интегральную схему (ПЛИС) и карту памяти 16. Блок 15 выполняет функции счетчика фотонов, вычислителя и накопителя данных. Информация из блока 15 записывается в карту памяти 16 и по локальной сети передается на монитор 17 в кабину пилотов.
На фиг. 3 и фиг. 4 показан выход лазерного пучка 18 наружу и вход приходящих пучков 19 и 20 внутрь ВС с помощью поворотного зеркала 21 и окна 22, которое крепится на обтекатель 23. Пучки 18, 19 и 20 направлены вдоль фюзеляжа в направлении полета ВС. Приходящие пучки 19 и 20 располагаются один над другим, что позволяет уменьшить выступающую наружу часть обтекателя 23.
Информация о пространственном распределении эхосигналов основного P1(x) и дополнительного P2(x) приемных каналов, где x – дистанция от лидара в направлении полета, накапливается в электронном блоке 15. Время накопления эхосигналов в каждом цикле измерений составляет 10 сек. В электронном блоке 15 вычисляют фактор q(x) влияния турбулентности на среднюю мощность рассеянного света на приемнике согласно алгоритму:  . Вычисляют структурную характеристику коэффициента преломления согласно алгоритму (Разенков И.А. Оценка интенсивности турбулентности из лидарных данных. // Оптика атмосферы и океана. 2020. Т. 33. № 01. С. 1-9):
. Вычисляют структурную характеристику коэффициента преломления согласно алгоритму (Разенков И.А. Оценка интенсивности турбулентности из лидарных данных. // Оптика атмосферы и океана. 2020. Т. 33. № 01. С. 1-9):  , где: R – радиус приемо-передающей апертуры лидара;
, где: R – радиус приемо-передающей апертуры лидара;  – волновое число; λ – длина волны;
– волновое число; λ – длина волны;  – масштаб Френеля.
– масштаб Френеля.
На фиг. 5 показан осредненный высотный профиль структурной характеристики Cn2(z) модели Хафнагеля-Волли (Voitsekhovich V.V. Efficiency of off-axis astronomical adaptive systems: Comparison of theoretical and experimental data / V.V. Voitsekhovich, V.G. Orlov, S. Guevas, R. Avila // Astron. Astrophys. Suppl. Ser. 1998. V 133. P.427 – 430), полученный из экспериментальных данных, где z - высота. Воспользуемся профилем структурной характеристики Cn2(z) на фиг. 5, чтобы смоделировать турбулентность в ясном небе на высоте 10 км. Согласно графику на фиг. 5 на высоте z=10 км характеристика Cn2(z)=10-17 м-2/3.
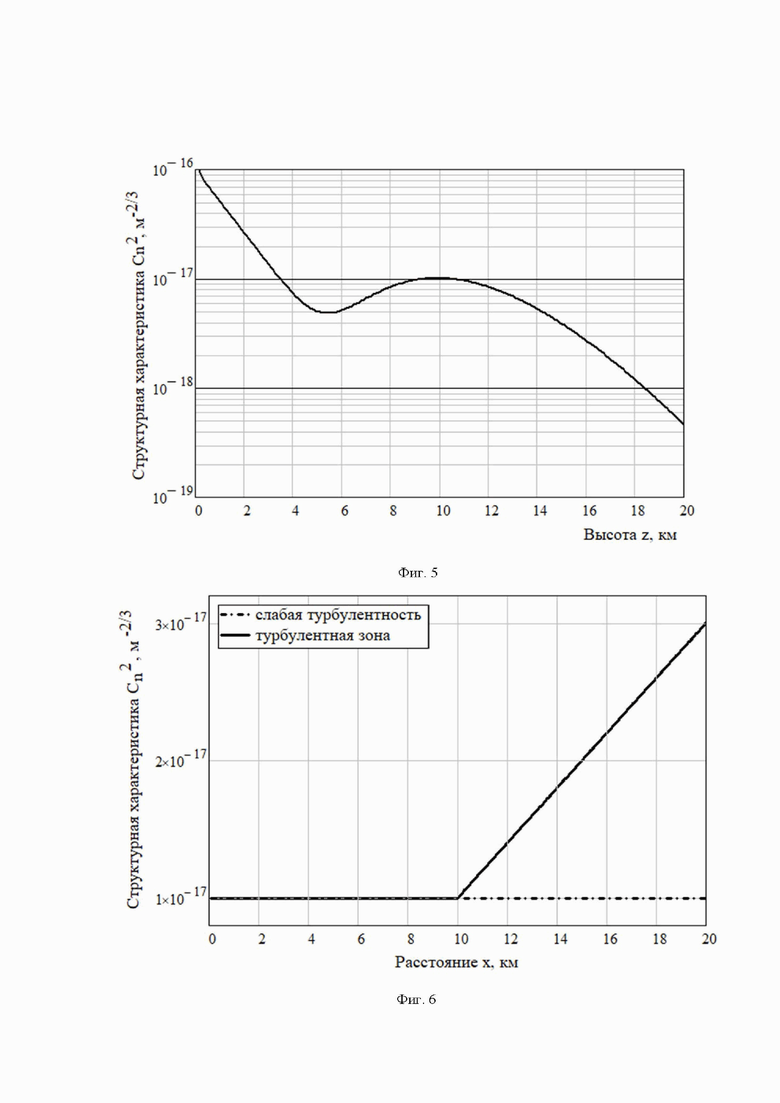
На фиг. 6 прямая линия для интервала расстояний от лидара до 20 км, помеченная как «точка-пунктир», соответствует горизонтальной трассе при слабой турбулентности, при этом значение структурной характеристики коэффициента преломления Cn2=10-17 м-2/3. Соответствующие этому значению Cn2 профили эхосигналов основного P1(x) приемного канала (сплошная) и дополнительного P2(x) приемного канала (пунктир) представлены на фиг. 7.
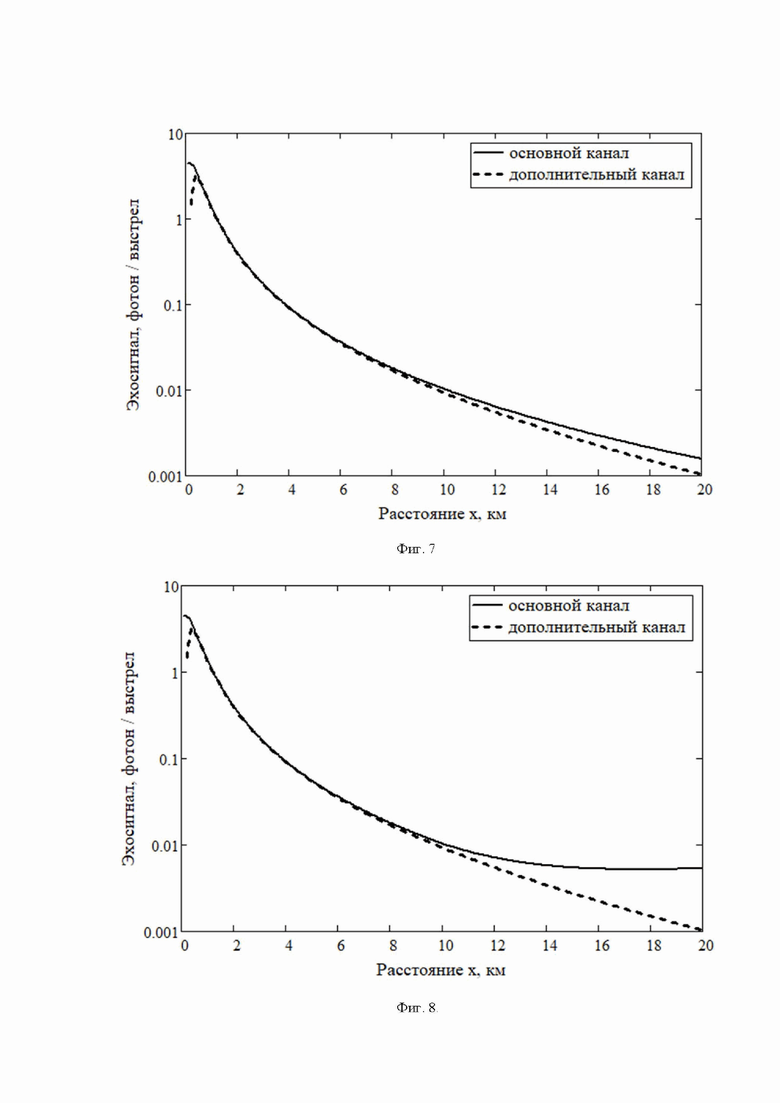
На фиг. 6 сплошная ломаная линия профиля структурной характкристики Cn2(x) соответствует интенсивной турбулентной зоне, которая начинается на дистанции 10 км и интенсивность турбулентности при этом линейно растет до значения 3×10-17 м-2/3 на дистанции 20 км. Соответствующие этому профилю Cn2(x) эхосигналы основного P1(x) приемного канала (сплошная) и дополнитеотного P2(x) приемного канала (пунктир) представлены на фиг. 8. Из сопоставления графиков на фиг. 7 и фиг. 8 следует, что при возникновении интенсивной турбулентной зоны разница между эхосигналами основного P1(x) приемного канала (сплошная) и дополнительного P2(x) приемного канала (пунктир) на фиг. 8 существенно больше, чем на фиг. 7.
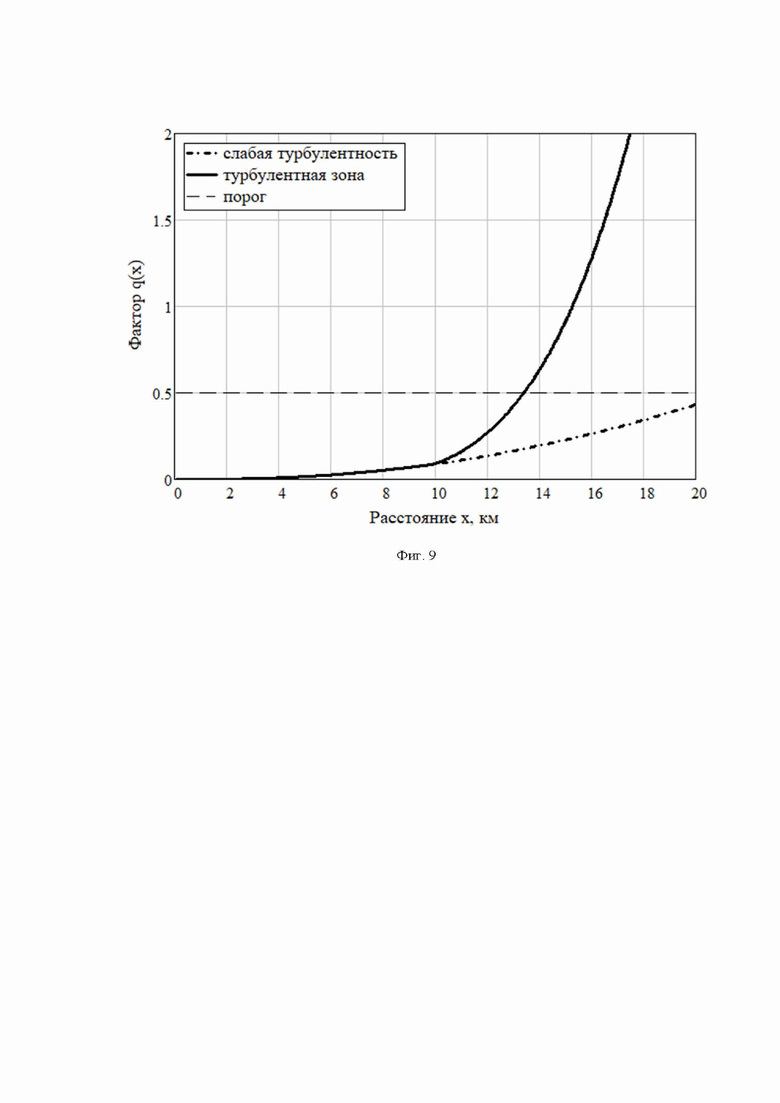
На фиг. 9 представлен фактор q(x), вычисленный из эхосигналов P1(x) и P2(x) согласно алгоритму:  . Фактор q(x) на фиг. 9, полученный из эхосигналов на фиг. 7 для случая слабой турбулентности, отмечен линией «точка-пунктир». Для случая интенсивной турбулентной зоны профиль q(x), вычисленный из эхосигналов на рис. 8, показан на фиг. 9 сплошной линией. Пунктирной линией на фиг. 9 обозначен порог qпор=0,5, который условно разделяет случаи слабой и умеренной интенсивности турбулентности.
. Фактор q(x) на фиг. 9, полученный из эхосигналов на фиг. 7 для случая слабой турбулентности, отмечен линией «точка-пунктир». Для случая интенсивной турбулентной зоны профиль q(x), вычисленный из эхосигналов на рис. 8, показан на фиг. 9 сплошной линией. Пунктирной линией на фиг. 9 обозначен порог qпор=0,5, который условно разделяет случаи слабой и умеренной интенсивности турбулентности.
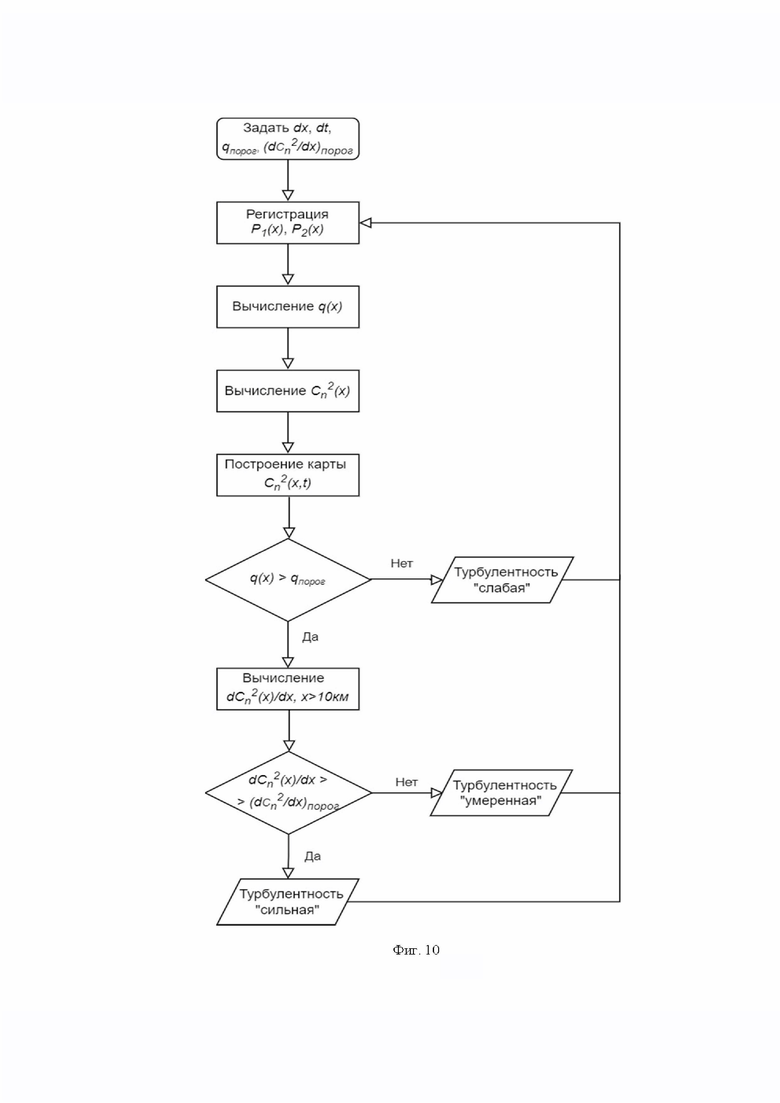
На фиг. 10 дана схема вычислительного алгоритма, позволяющего определить степень интенсивности турбулентной зоны впереди ВС. Перед началом полета и началом работы турбулентного лидара следует задать пространственное разрешение Δx=15 м; время накопления эхосигналов Δt=10 с; пороговое значение для фактора qпор=0,5 и пороговое значение для производной структурной характеристики (dCn2/dx)пор=10-17 м-2/3/км. Заметим, что пороговые значения qпор и (dCn2/dx)пор должны уточняться для конкретной конструкции турбулентного лидара, т.к. они зависят от размера приемо-передающей апертуры, диаметр которой может изменяться от 50 мм до 100 мм. Согласно алгоритму на фиг. 10 в цикле с временным интервалом Δt=10 с производится: регистрация и накопление эхосигналов P1(x) и P2(x) с пространственным разрешением Δx=15 м до дистанции 20 км; вычисление фактора q(x) согласно алгоритму: ; вычисление структурной характеристики Cn2(x) согласно алгоритму: 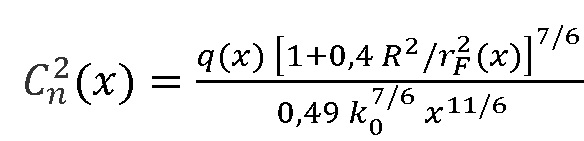 ; построение, либо обновление, карты пространственно-временного распределения характеристики Cn2(x,t); сравнение профиля фактора q(x) с пороговым значением qпор, если q(x) < qпор , тогда турбулентность «слабая», в противном случае производится вычисление производной dCn2/dx для x>10 км; сравнение производной dCn2/dx с пороговым значением (dCn2/dx)пор, если dCn2/dx < (dCn2/dx)пор, тогда турбулентность «умеренная», в противном случае турбулентность «сильная»; описанная процедура повторяется сначала. По локальной сети ВС в реальном времени в кабину пилотов на монитор передается полученная информация, включая графическое представление интенсивности атмосферной турбулентности, где по осям отложены «дистанция» и «подлетное время», как это показано на мониторе 17 на фиг. 2.
; построение, либо обновление, карты пространственно-временного распределения характеристики Cn2(x,t); сравнение профиля фактора q(x) с пороговым значением qпор, если q(x) < qпор , тогда турбулентность «слабая», в противном случае производится вычисление производной dCn2/dx для x>10 км; сравнение производной dCn2/dx с пороговым значением (dCn2/dx)пор, если dCn2/dx < (dCn2/dx)пор, тогда турбулентность «умеренная», в противном случае турбулентность «сильная»; описанная процедура повторяется сначала. По локальной сети ВС в реальном времени в кабину пилотов на монитор передается полученная информация, включая графическое представление интенсивности атмосферной турбулентности, где по осям отложены «дистанция» и «подлетное время», как это показано на мониторе 17 на фиг. 2.
На фиг. 11 показан пример зондирования в горизонтальном направлении перпендикулярном фюзеляжу самолета Ту-134 во время полета на высоте 9000 м в 08:00UTC 10 сентября 2022 г. Начиная с 6-й минуты в течение 13-ти минут в интервале расстояний от 4 до 14 км наблюдалась турбулентная зона «умеренной» интенсивности.
Предлагаемое изобретение позволит заблаговременно обнаруживать турбулентность в ясном небе и тем самым повысит безопасность полетов воздушных судов, поскольку у пилота будет не менее 30 сек для принятия решения (уменьшение скорости полета, совершение маневра) и для своевременного предупреждения пассажиров о вхождении в интенсивную турбулентную зону.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и лидарная система для оперативного контроля интенсивности турбулентности на глиссаде | 2021 |
|
RU2769090C1 |
| Способ определения вертикального профиля интенсивности оптической турбулентности в атмосфере | 2022 |
|
RU2789631C1 |
| Способ определения вертикального профиля интенсивности оптической турбулентности в атмосфере | 2022 |
|
RU2790930C1 |
| Способ обнаружения локальных очагов горения | 2024 |
|
RU2835391C1 |
| Способ и лидарная система для обнаружения ориентированных ледяных кристаллов в атмосфере | 2023 |
|
RU2813096C1 |
| Лидарный способ определения интенсивности оптической турбулентности | 2021 |
|
RU2777294C1 |
| СПОСОБ И ЛИДАРНАЯ СИСТЕМА ДЛЯ ИЗМЕРЕНИЯ ТУРБУЛЕНТНОСТЕЙ АТМОСФЕРЫ, ОСУЩЕСТВЛЯЕМОГО НА БОРТУ ЛЕТАТЕЛЬНЫХ АППАРАТОВ, А ТАКЖЕ В АЭРОПОРТАХ И НА ВЕТРОВЫХ ЭЛЕКТРОСТАНЦИЯХ | 2006 |
|
RU2405172C2 |
| Комбинированный лидар | 2020 |
|
RU2738588C1 |
| Лидар для зондирования плотных аэрозольных образований атмосферы | 2022 |
|
RU2801962C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА ВЫБРОСА | 1991 |
|
RU2028007C1 |



Группа изобретений относится к области метеорологии и физики атмосферы и может быть использовано при создании авиационного оборудования летательных аппаратов для заблаговременного обнаружения турбулентности в ясном небе (ТЯН) впереди воздушного судна (ВС) с целью обеспечения безопасности полетов. Сущность изобретения заключается в осуществлении зондирования атмосферы турбулентным лидаром с борта воздушного судна по курсу полета, регистрации двух профилей эхосигналов в режиме счета фотонов, передаче сигналов в электронный блок, где эхосигналы накапливаются, вычисляется фактор влияния турбулентности и характеристики турбулентности в направлении полета. Результатом работы системы является заблаговременная, за 30-60 сек подлетного времени, оценка интенсивности ожидаемой болтанки воздушного судна в градациях «слабая», «умеренная» и «сильная». Технический результат – дистанционное оперативное определение состояния турбулентности и заблаговременная оценка интенсивности болтанки воздушного судна. 2 н.п. ф-лы, 11 ил.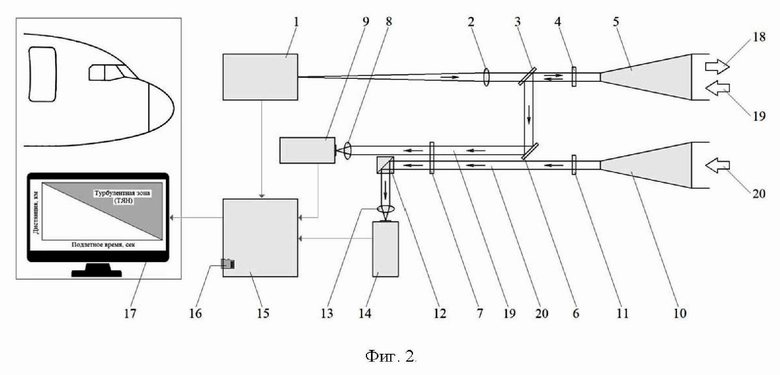
1. Способ контроля интенсивности турбулентности в направлении полета воздушного судна (ВС) с помощью лидарной системы, которая располагается на борту ВС, где направление зондирования лидара совпадает с продольной осью ВС, отличающийся тем, что лидар, созданный на эффекте усиления обратного рассеяния, располагается напротив иллюминатора и плоского поворотного зеркала, трассу зондирования поворотным зеркалом устанавливают параллельно фюзеляжу в направлении полета, передатчик лидара посылает в атмосферу лазерные импульсы и принимает эхосигналы вдоль траектории полета воздушного судна, при этом эхосигналы основного и дополнительного приемных каналов регистрируются фотоприемниками в режиме счета фотонов, затем в виде электрических одноэлектронных импульсов поступают в электронный блок, где они накапливаются, обрабатываются и хранятся, далее определяют из эхосигналов пространственный профиль фактора влияния турбулентности q и профиль градиента структурной характеристики коэффициента преломления dCn2/dx и рассчитывают оценку предстоящей болтанки воздушного судна в градациях «слабая», если q<0,5; «умеренная», если dCn2/dx<10-17 м-2/3/км, «сильная», если dCn2/dx>10-17 м-2/3/км.
2. Лидарная система контроля интенсивности турбулентности в направлении полета воздушного судна, включающая приемопередатчик ультрафиолетового турбулентного лидара и электронный блок, при этом ультрафиолетовый турбулентный лидар расположен на борту воздушного судна напротив кварцевого иллюминатора и поворотного зеркала, которое устанавливает трассу зондирования лидара параллельно фюзеляжу в направлении полета; приемопередатчик посылает в атмосферу короткие световые импульсы и принимает эхосигналы, в электронный блок поступают принимаемые приемопередатчиком эхосигналы в виде фотоэлектрических импульсов, где они регистрируются счетчиком фотонов и производится накопление информации о пространственном распределении эхосигналов основного P1(x) и дополнительного P2(x) приемных каналов, где x – дистанция от лидара, далее вычисляют фактор q(x) влияния турбулентности на среднюю мощность рассеянного света на приемнике согласно алгоритму:  .
.
| US 8434358 B2, 07.05.2013 | |||
| Способ и лидарная система для оперативного контроля интенсивности турбулентности на глиссаде | 2021 |
|
RU2769090C1 |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ ТУРБУЛЕНТНОСТИ ВОЗДУХА ВОКРУГ ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2365523C2 |
| US 2007260366 A1, 08.11.2007. | |||
