Область техники, к которой относится изобретение
[0001] Настоящая технология в целом относится к лидарным системам (LIDAR, LIght Detection And Ranging) и к способам обнаружения объектов в окружающем пространстве автономного транспортного средства. В частности, она относится к лидарным системам и способам для обнаружения объектов в интересующей области окружающего пространства.
Уровень техники
[0002] В известных решениях предложены и реализованы компьютерные навигационные системы, способствующие навигации и/или управлению транспортными средствами. Известны различные системы такого рода - от простых решений, основанных на определении местоположения на карте и использующих компьютерную систему для помощи водителю в навигации на маршруте от пункта отправления до пункта назначения, до более сложных решений, таких как компьютеризированные и/или автономные системы вождения.
[0003] Некоторые из этих систем реализованы в виде широко известной системы круиз-контроля. В этом случае компьютерная система, установленная на транспортном средстве, поддерживает заданную пользователем скорость движения транспортного средства. Некоторые системы круиз-контроля реализуют систему интеллектуального управления дистанцией, позволяя пользователю задавать расстояние до идущего впереди автомобиля (например, выбирать значение, выраженное в количестве транспортных средств), при этом компьютерная система регулирует скорость транспортного средства, по меньшей мере частично, в зависимости от его приближения к впереди идущему транспортному средству на заранее заданное расстояние. Некоторые из систем круиз-контроля дополнительно оснащены системами предупреждения столкновений, которые при обнаружении транспортного средства (или других препятствий) перед движущимся транспортным средством замедляют или останавливают его.
[0004] Некоторые из наиболее передовых систем обеспечивают полностью автономное движение транспортного средства без непосредственного участия в управлении оператора (т.е. водителя). Такие автономно управляемые транспортные средства содержат системы, способные ускорять, замедлять, останавливать, перестраивать в другой ряд и самостоятельно парковать транспортное средство.
[0005] Одна из основных технических проблем, возникающих при реализации вышеупомянутых систем, заключается в способности обнаруживать объекты вокруг транспортного средства. Например, таким системам требуется обнаруживать другое транспортное средство перед транспортным средством с установленной системой, способное представлять опасность для этого транспортного средства и требовать принятия системой корректирующих мер, таких как торможение или иное изменение скорости, остановка или перестроение в другой ряд. В другом примере таким системам может требоваться обнаружение пешехода или животного, пересекающего дорогу перед транспортным средством или движущегося иным образом вблизи транспортного средства.
[0006] Обнаружение объектов с помощью лидарной системы обычно предполагает передачу лучей света в направлении интересующей области и обнаружение отраженных световых лучей (например, от объектов в интересующей области) для формирования представления интересующей области, включая соответствующие объекты. В качестве источника излучения (света) часто используются лазеры, излучающие световые импульсы в узком диапазоне длин волн. Положение и расстояние до объекта могут быть вычислены, среди прочего, путем расчета времени пролета излучаемого и обнаруженного светового луча. Вычисляя такие положения и трактуя их как «точки данных», можно сформировать цифровое многомерное представление окружающего пространства транспортного средства.
[0007] С точки зрения физики обнаружения объектов с помощью лидаров, здесь используется известный в данной области техники подход, основанный на применении импульсного излучения и реализуемый «времяпролетными» (Time of Flight, ToF) лидарными системами. Во лидарных системах ToF каждый лидарный датчик излучает короткий импульс заданной длины волны и затем фиксирует время, требуемое для того, чтобы этот импульс отразился от объекта в окружающем пространстве и вернулся к этому лидарному датчику. Если лидарная система ToF расположена в верхней части транспортного средства и содержит несколько таких лидарных датчиков, то ее поворот на 360 градусов позволяет формировать трехмерное представление обстановки вокруг этого транспортного средства.
[0008] Такое трехмерное представление частично формируется отраженными лучами, принимаемыми лидаром, который формирует точки данных, представляющие окружающие объекты. Эти точки образуют облака, которые представляют окружающие объекты и образуют трехмерную карту. Каждая точка в таком облаке точек связана с координатами в координатном пространстве. Кроме того, каждая точка может быть связана с некоторой дополнительной информацией, такой как расстояние до данного объекта от беспилотного транспортного средства. С точками в облаке точек может быть связана и другая информация.
[0009] Чем больше будет набрано точек приемлемого качества, тем лучше. В этом случае компьютер беспилотного транспортного средства может использовать это облако точек при выполнении задач различной когнитивной сложности, например, фильтрации, кластеризации или выборки точек, объединения облаков точек, распознавания объекта и т.д. Качество выполнения этих отдельных задач влияет на общее качество определения местонахождения и навигации беспилотного транспортного средства. Точная информация об окружающих объектах повышает безопасность вождения.
[00010] При определенных обстоятельствах распределение облаков точек может быть неоднородным, что приводит к повышенной плотности точек в некоторых интересующих областях и пониженной плотности точек в других интересующих областях. Это может приводить к различиям в чувствительности при обнаружении объекта в разных интересующих областях.
[00011] Таким образом, существует потребность в системах и способах, позволяющих обойти, уменьшить или преодолеть ограничения предшествующего уровня техники.
[00012] Для решения указанной выше проблемы были предложены некоторые подходы предшествующего уровня техники.
[00013] Публикация патентной заявки US 2012249996 A1 описывает лазерный радар, содержащий первый сканирующий элемент, выполняющий сканирование лазерным лучом в виртуальной плоскости, проходящей через некоторую ось. Модуль управления перемещает первый сканирующий элемент, изменяя угол направления сканирующего луча в этой плоскости. Второй сканирующий элемент отклоняет сканирующий лазерный луч и снова сканирует окружающее пространство отклоненным лазерным лучом. Оптический коллектор собирает отраженный свет. Привод вращает второй сканирующий элемент и оптический коллектор вокруг оси. Второй сканирующий элемент содержит отклоняющую поверхность для отклонения лазерного луча. Отклоняющая поверхность состоит из нескольких отражающих поверхностей, коаксиально расположенных относительно оси. Отражающие поверхности имеют разный наклон по отношению к горизонтальной плоскости, перпендикулярной оси устройства.
[00014] Публикация патентной заявки US 2013033732 A1 описывает вращающуюся платформу для сканирования, содержащую вращающийся корпус и два или более подвеса для поддержки вращающегося корпуса на первом конце соответствующих подвесов, при этом подвесы имеют длину, превышающую радиус вращающегося корпуса, и смещены от центра вращения вращающегося корпуса. Подвесы прикреплены, соответственно, к основанию на втором конце в месте, расположенном ближе к центру вращения, чем к первому концу соответствующего подвеса, позволяя вращающемуся корпусу вращаться вокруг центра вращения с практически линейной зависимостью вращения от сигнала привода.
[00015] Публикация патентной заявки US 2019265338 A1 описывает излучающее устройство для оптической системы обнаружения для транспортных средств, которое предназначено для сканирования области вокруг транспортного средства с помощью светового луча и содержит источник света, испускающий световые лучи, и блок отклонения. Блок отклонения предназначен для отклонения светового луча, подаваемого на блок отклонения от источника света, под разными углами сканирования (α), и содержит зеркало произвольной формы. Зеркало произвольной формы содержит по меньшей мере два плоских элемента с разными углами наклона, чтобы отражать световой луч и формировать заданное поле обзора излучающего устройства при заранее заданных значениях (-α3, -α2, -α1, α0 , +α1, +α2, +α3) угла сканирования (α), при этом указанные значения соответствуют углам наклона. Изобретение также относится к устройству оптического обнаружения, транспортному средству, содержащему по меньшей мере одно устройство оптического обнаружения, и к способу формирования поля обзора для излучателя устройства оптического обнаружения транспортного средства.
Раскрытие изобретения
[00016] В соответствии с первым широким аспектом настоящей технологии реализована лидарная система для обнаружения объектов в окружающем пространстве автономного транспортного средства, содержащая источник для излучения выходных лучей по внутреннему пути излучения и сканер, расположенный на внутреннем пути излучения и направляющий выходные лучи в поле обзора вокруг транспортного средства в виде множества точек данных в схеме сканирования. Сканер содержит сканирующую поверхность с неплоским профилем и множество сегментов отражающей поверхности, причем для каждого сегмента отражающей поверхности задается положение на сканирующей поверхности и угол относительно опорной поверхности для отражения выходных лучей с заданным углом распространения лучей, а положение и угол каждого сегмента отражающей поверхности позволяют регулирующей распределение точек данных в схеме сканирования по полю обзора.
[00017] В некоторых вариантах осуществления положение и угол по меньшей мере некоторых сегментов из множества сегментов отражающей поверхности обеспечивают однородное распределение точек данных в по меньшей мере части схемы сканирования.
[00018] В некоторых вариантах осуществления положение и угол по меньшей мере некоторых сегментов из множества сегментов отражающей поверхности обеспечивают однородную плотность точек данных во внешней части и в центральной части схемы сканирования.
[00019] В некоторых вариантах осуществления положение и угол по меньшей мере некоторых сегментов из множества сегментов отражающей поверхности позволяют компенсировать разницу в частоте сканирования на краю сканирующей поверхности по сравнению с центром сканирующей поверхности для регулирования распределения точек данных.
[00020] В некоторых вариантах осуществления по меньшей мере один сегмент из множества сегментов отражающей поверхности является линейным.
[00021] В некоторых вариантах осуществления по меньшей мере один сегмент из множества сегментов отражающей поверхности является криволинейным.
[00022] В некоторых вариантах осуществления множество сегментов отражающей поверхности позволяет выполнить сканирующую поверхность выпуклой формы.
[00023] В некоторых вариантах осуществления множество сегментов отражающей поверхности позволяет выполнить сканирующую поверхность вогнутой формы.
[00024] В некоторых вариантах осуществления сканер представляет собой колеблющееся гальванометрическое зеркало.
[00025] В некоторых вариантах осуществления сканер представляет собой вращающуюся призму, а сканирующей поверхностью является одна из граней этой вращающейся призмы.
[00026] В некоторых вариантах осуществления сканер содержит вращающуюся призму и зеркало, при этом сканирующая поверхность содержит по меньшей мере одну грань вращающейся призмы и по меньшей мере одну поверхность зеркала.
[00027] В некоторых вариантах осуществления по меньшей мере два сегмента из множества сегментов отражающей поверхности расположены под углом друг к другу.
[00028] В некоторых вариантах осуществления по меньшей мере два сегмента из множества сегментов отражающей поверхности изготовлены из разных материалов для придания разных оптических свойств соответствующим распространяющимся лучам.
[00029] В некоторых вариантах осуществления множество сегментов отражающей поверхности образует линейную скругленную поверхность.
[00030] В некоторых вариантах осуществления лидарная система дополнительно содержит контроллер, связанный с источником излучения и со сканером и выполненный с возможностью побуждения падения выходного луча на заданный сегмент отражающей поверхности.
[00031] В некоторых вариантах осуществления этот контроллер позволяет перемещать сканер для избирательного контакта выходных лучей с заданным сегментом отражающей поверхности.
[00032] В некоторых вариантах осуществления контроллер позволяет перемещать выходные лучи для избирательного контакта выходных лучей с заданным сегментом отражающей поверхности.
[00033] В некоторых вариантах осуществления лидарная система дополнительно содержит приемник для приема отраженных распространяющихся лучей из поля обзора.
[00034] В соответствии с другим аспектом реализован способ обнаружения объектов в окружающем пространстве автономного транспортного средства, выполняемый контроллером, связанным с источником излучения и со сканером лидарной системы. Способ включает в себя обеспечение испускания источником излучения выходных лучей по внутреннему пути излучения лидарной системы и обеспечение направления сканером выходных лучей в поле обзора вокруг транспортного средства. Сканер содержит сканирующую поверхность с неплоским профилем и множеством сегментов отражающей поверхности, характеризующихся положением на сканирующей поверхности и углом к опорному элементу для отражения выходных лучей в виде распространяющегося луча с заданным углом распространения, при этом положение и угол по меньшей мере некоторых сегментов из множества сегментов отражающей поверхности позволяют регулировать угол распространения распространяющегося луча для регулирования распределения точек данных в схеме сканирования по полю обзора.
[00035] В некоторых вариантах осуществления способ дополнительно включает в себя обеспечение контроллером, связанным с источником излучения и со сканером, падения выходного луча на заданный сегмент отражающей поверхности.
[00036] В соответствии с еще одним аспектом реализован способ определения измененной конфигурации блока сканера для обеспечения однородной схемы сканирования. Способ включает в себя контроллер, определяющий схему предварительного сканирования, обеспечиваемый поверхностью предварительного сканирования блока сканера; если схема предварительного сканирования не является однородной, способ дополнительно включает в себя определение контроллером требуемого регулирования угла распространения распространяющегося луча для обеспечения однородной схемы сканирования и определение того, на какую часть поверхности предварительного сканирования блока сканера должен падать выходной луч для отражения в виде распространяющегося луча, и корректировку угла идентифицированной части поверхности предварительного сканирования для реализации требуемого регулирования распространяющегося луча.
[00037] В контексте настоящего описания термин «источник света» в широком смысле относится к любому устройству для испускания излучения, такого как излучаемый сигнал в виде луча, например, луча света, включая излучение на одной или нескольких соответствующих длинах волн в электромагнитном спектре. В одном из примеров источником света может быть лазер. Таким образом, источник света может содержать лазер, такой как твердотельный лазер, лазерный диод, лазер высокой мощности, либо альтернативный источник света, такой как источник света на основе светоизлучающих диодов. Некоторые (не имеющие ограничительного характера) примеры лазерного источника включают в себя лазерный диод Фабри-Перо, лазер с квантовыми ямами, лазер с распределенным брэгговским отражателем (DBR), лазер с распределенной обратной связью (DFB), волоконный лазер или лазер поверхностного излучения с вертикальным резонатором (VCSEL). Кроме того, лазерный источник может излучать световые лучи в различных форматах, таких как световые импульсы, непрерывные волны, квазинепрерывные волны и т.д. В некоторых неограничивающих примерах лазерный источник может содержать лазерный диод, излучающий свет с длиной волны от приблизительно 650 нм до приблизительно 1150 нм. Кроме того, источник света может содержать лазерный диод, излучающий световые лучи с длиной волны от приблизительно 800 нм до приблизительно 1000 нм, от приблизительно 850 нм до приблизительно 950 нм, от приблизительно 1300 нм до приблизительно 1600 нм или в любом другом подходящем диапазоне. Если не указано иное, термин «приблизительно» применительно к числовому значению определяется как отклонение до 10% от указанного значения.
[00038] В контексте настоящего описания «выходной луч» может также называться испускаемым лучом, таким как луч света, формируемый источником излучения и направленный от источника к интересующей области. Выходной луч может иметь один или несколько параметров, таких как длительность луча, угловая дисперсия луча, длина волны, мгновенная мощность, плотность фотонов на разном расстоянии от источника света, средняя мощность, интенсивность луча, ширина луча, частота повторения луча, последовательность лучей, рабочий цикл импульса, длина волны, фаза и т.д. Выходной луч может быть неполяризованным или случайно поляризованным, может не иметь определенной или фиксированной поляризации (например, поляризация может меняться со временем) или может иметь определенную поляризацию (например, линейную, эллиптическую или круговую поляризацию).
[00039] В контексте настоящего описания «входной луч» представляет собой излучение или свет, обычно попадающий в систему после отражения от одного или нескольких объектов в интересующей области. Входной луч также может называться испускаемым лучом или лучом света. Под отражением подразумевается, что по меньшей мере часть выходного луча, падающего на один или несколько объектов в интересующей области, отражается от этого одного или нескольких объектов. Входной луч может иметь один или несколько параметров, таких как время пролета (то есть время от момента излучения до момента приема), мгновенная мощность (например, сигнатура мощности), средняя мощность во всем отраженном импульсе, распределение фотонов в сигнале за период обратного импульса и т.д. В зависимости от конкретной реализации, излучение или свет, собранный во входном луче, может происходить от источников, отличных от источника отраженного выходного луча. Например, некоторая часть входного луча может содержать световой шум из окружающей среды (включая рассеянный солнечный свет) или от других источников света, внешних по отношению к данной системе.
[00040] В контексте настоящего описания термин «окружение» или «среда» вокруг данного транспортного средства относится к области или объему вокруг этого транспортного средства, включая часть его текущего окружения, доступную для сканирования с использованием одного или нескольких датчиков, установленных на данном транспортном средстве, например, для создания трехмерной карты такого окружения или для обнаружения в нем объектов.
[00041] В контексте настоящего описания «интересующая область» может в широком смысле включать в себя часть наблюдаемого окружения лидарной системы, в которой могут быть обнаружены один или несколько объектов. Следует отметить, что на интересующую область вокруг лидарной системы могут влиять различные условия, такие как ориентация лидарной системы (например, направление оптической оси лидарной системы), положение лидарной системы по отношению к окружающей среде (например, высота над землей, рельеф окружающей местности и препятствия), рабочие параметры лидарной системы (например, мощность излучения, параметры расчета, определенные рабочие углы) и т.д. Интересующая область лидарной системы может быть определена, например, углом или телесным углом. В одном примере интересующая область также может быть определена в пределах некоторого диапазона расстояний (например, до 200 м).
[00042] В контексте настоящего описания термин «сервер» означает компьютерную программу, выполняемую соответствующими аппаратными средствами и способную принимать запросы (например, от электронных устройств) через сеть и выполнять эти запросы или инициировать их выполнение. Аппаратные средства могут быть реализованы в виде одного физического компьютера или одной компьютерной системы, что не существенно для настоящей технологии. В настоящем контексте выражение «сервер» не означает, что каждая задача (например, принятая команда или запрос) или некоторая определенная задача принимается, выполняется или запускается одним и тем же сервером (т.е. одними и теми же программными и/или аппаратными средствами). Это выражение означает, что любое количество программных средств или аппаратных средств может принимать, отправлять, выполнять или инициировать выполнение любой задачи или запроса либо результатов любых задач или запросов. Все эти программные и аппаратные средства могут представлять собой один сервер или несколько серверов, причем оба эти случая подразумеваются в выражении «по меньшей мере один сервер».
[00043] В контексте настоящего описания термин «электронное устройство» означает любое компьютерное аппаратное средство, способное выполнять программы, подходящие для решения поставленной задачи. В контексте настоящего описания термин «электронное устройство» подразумевает, что устройство может функционировать в качестве сервера для других электронных устройств, но это не обязательно для настоящей технологии. Таким образом, некоторые (не имеющие ограничительного характера) примеры электронных устройств включают в себя устройства для автономного вождения, персональные компьютеры (настольные, ноутбуки, нетбуки и т.п.), смартфоны и планшеты, а также сетевое оборудование, такое как маршрутизаторы, коммутаторы и шлюзы. Должно быть понятно, что в настоящем контексте факт функционирования устройства в качестве электронного устройства не означает, что оно не может функционировать в качестве сервера для других электронных устройств.
[00044] В контексте настоящего описания выражение «информация» относится к информации любого рода или вида, допускающей хранение в базе данных. Такая информация включает в себя, помимо прочего, визуализированные данные (например, карты), аудиовизуальные произведения (например, изображения, фильмы, звукозаписи, презентации и т.д.), различные данные (например, данные о местоположении, данные о погоде, данные о трафике, числовые данные и т.д.), текст (например, мнения, комментарии, вопросы, сообщения и т.д.), документы, электронные таблицы и т.д., но не ограничивается этим.
[00045] В контексте настоящего описания термин «база данных» означает любой структурированный набор данных, независимо от его конкретной структуры, программного обеспечения для управления базой данных или компьютерных аппаратных средств для хранения этих данных, их применения или иным способом выполнения для их использования. База данных может располагаться в тех же аппаратных средствах, где реализован процесс, обеспечивающий хранение или использование информации, хранящейся в базе данных, либо база данных может располагаться в отдельных аппаратных средствах, таких как специализированный сервер или несколько серверов.
[00046] В контексте настоящего описания числительные «первый» «второй», «третий» и т.д. используются лишь для указания различия между существительными, к которым они относятся, а не для описания каких-либо определенных взаимосвязей между этими существительными. Кроме того, как встречается в настоящем описании в другом контексте, ссылка на «первый» элемент и «второй» элемент не исключает того, что эти два элемента в действительности могут быть одним и тем же элементом.
[00047] Каждый вариант осуществления настоящей технологии относится к по меньшей мере одной из вышеупомянутых целей и/или аспектов, но не обязательно ко всем ним. Должно быть понятно, что некоторые аспекты настоящей технологии, связанные с попыткой достижения вышеупомянутой цели, могут не соответствовать этой цели и/или могут соответствовать другим целям, явным образом здесь не упомянутым.
[00048] Дополнительные и/или альтернативные признаки, аспекты и преимущества вариантов осуществления настоящей технологии содержатся в дальнейшем описании, в приложенных чертежах и в формуле изобретения.
Краткое описание чертежей
[00049] Эти и другие признаки, аспекты и преимущества настоящей технологии поясняются в дальнейшем описании, в приложенной формуле изобретения и на следующих чертежах.
[00050] На фиг. 1 представлена схема примера компьютерной системы для реализации некоторых неограничивающих вариантов осуществления настоящей технологии.
[00051] На фиг. 2 представлена схема сетевой вычислительной среды, подходящей для использования с некоторыми неограничивающими вариантами осуществления настоящей технологии.
[00052] На фиг. 3 представлена схема примера лидарной системы, реализованной в соответствии с некоторыми неограничивающими вариантами осуществления настоящей технологии.
[00053] На фиг. 4 представлен вид сбоку блока сканера лидарной системы, показанной на фиг. 3, в соответствии с некоторыми неограничивающими вариантами осуществления настоящей технологии.
[00054] На фиг. 5 представлен вид сбоку блока сканера лидарной системы, показанной на фиг. 3, в соответствии с некоторыми другими неограничивающими вариантами осуществления настоящей технологии.
[00055] На фиг. 6 представлен вид сверху сканирующей поверхности блока сканера с фиг. 4 и фиг. 5 в соответствии с некоторыми неограничивающими вариантами осуществления настоящей технологии.
[00056] На фиг. 7 схематично показано распространение лучей от блока сканера с фиг. 4 и фиг. 5 в поле обзора в соответствии с некоторыми другими неограничивающими вариантами осуществления настоящей технологии.
[00057] На фиг. 8 схематично показано распределение точек данных в поле обзора с фиг. 7 в соответствии с некоторыми другими неограничивающими вариантами осуществления настоящей технологии.
[00058] На фиг. 9 представлен вид сбоку сканера предшествующего уровня техники.
[00059] На фиг. 10 схематично показано распространение лучей от блока сканера, показанного на фиг. 9.
[00060] На фиг. 11 показано распределение точек данных при угле колебания блока сканера согласно настоящей технологии по сравнению с блоком сканера предшествующего уровня техники.
[00061] На фиг. 12 показан угол распространения луча, распространяющегося от изогнутой отражающей поверхности.
[00062] На фиг. 13 представлен блок сканера с фиг. 3, выполненный в виде призмы в соответствии с некоторыми другими неограничивающими вариантами осуществления настоящей технологии.
[00063] На фиг. 14 представлена схема способа обнаружения объекта, расположенного вблизи транспортного средства, в сетевой вычислительной среде с фиг. 2 на основе данных, полученных лидарной системой с фиг. 3, в соответствии с некоторыми неограничивающими вариантами осуществления настоящей технологии.
Осуществление изобретения
[00064] Представленные в данном описании примеры и условные обозначения предназначены для обеспечения лучшего понимания принципов настоящей технологии, а не для ограничения ее объема до таких специально приведенных примеров и условий. Очевидно, что специалисты в данной области техники способны разработать различные способы и устройства, которые явно не описаны и не показаны, но реализуют принципы настоящей технологии в пределах ее существа и объема.
[00065] Кроме того, чтобы способствовать лучшему пониманию, последующее описание может содержать упрощенные варианты реализации настоящей технологии. Специалистам в данной области должно быть понятно, что различные варианты осуществления настоящей технологии могут быть значительно сложнее.
[00066] В некоторых случаях приводятся полезные примеры модификаций настоящей технологии. Они способствуют пониманию, но также не определяют объема или границ настоящей технологии. Представленный перечень модификаций не является исчерпывающим и специалист в данной области может разработать другие модификации в пределах объема настоящей технологии. Кроме того, если в некоторых случаях модификации не описаны, это не означает, что они невозможны и/или что описание содержит единственно возможный вариант реализации того или иного элемента настоящей технологии.
[00067] Описание принципов, аспектов и вариантов реализации настоящей технологии, а также их конкретные примеры предназначены для охвата их структурных и функциональных эквивалентов, независимо от того, известны они в настоящее время или будут разработаны в будущем. Например, специалистам в данной области техники должно быть понятно, что любые приведенные здесь структурные схемы соответствуют концептуальным представлениям иллюстративных принципиальных схем, реализующих принципы настоящей технологии. Также должно быть понятно, что любые блок-схемы, схемы процессов, диаграммы изменения состояния, псевдокоды и т.п. соответствуют различным процессам, которые могут быть представлены на машиночитаемом физическом носителе информации и могут выполняться компьютером или процессором, независимо от того, показан такой компьютер или процессор явно или нет.
[00068] Функции различных элементов, показанных на иллюстрациях, включая любой функциональный блок, обозначенный как «процессор», могут быть реализованы с использованием специализированных аппаратных средств, а также аппаратных средств, способных выполнять соответствующее программное обеспечение. Если используется процессор, эти функции могут выполняться одним выделенным процессором, одним совместно используемым процессором или несколькими отдельными процессорами, некоторые из которых могут использоваться совместно. Кроме того, явное использование термина «процессор» или «контроллер» не должно трактоваться как указание исключительно на аппаратные средства, способные выполнять программное обеспечение, и может подразумевать, помимо прочего, аппаратные средства цифрового сигнального процессора (DSP), сетевой процессор, специализированную интегральную схему (ASIC), программируемую вентильную матрицу (FPGA), ПЗУ для хранения программного обеспечения, ОЗУ и энергонезависимое ЗУ. Также могут подразумеваться другие аппаратные средства, общего назначения и/или заказные.
[00069] Программные модули или просто модули, реализация которых предполагается в виде программных средств, могут быть представлены здесь как любое сочетание элементов блок-схемы или других элементов, указывающих на выполнение шагов процесса и/или содержащих текстовое описание. Такие модули могут выполняться аппаратными средствами, показанными явно или подразумеваемыми.
[00070] Далее с учетом изложенных выше принципов рассмотрены некоторые не имеющие ограничительного характера примеры, иллюстрирующие различные варианты реализации аспектов настоящей технологии.
Компьютерная система
[00071] На фиг. 1 представлена схема компьютерной системы 100, подходящей для использования с некоторыми реализациями настоящей технологии. Компьютерная система 100 содержит различные аппаратные элементы, включая один или несколько одноядерных или многоядерных процессоров, совместно представленных процессором 110, твердотельный накопитель 120 и память 130, которая может быть памятью с произвольным доступом или памятью любого другого типа.
[00072] Связь между различными элементами компьютерной системы 100 может осуществляться через одну или несколько внутренних и/или внешних шин (не показаны), таких как шина PCI, шина USB, шина FireWire стандарта IEEE 1394, шина SCSI, шина Serial-ATA и т.д., с которыми различные аппаратные элементы соединены электронным образом. Согласно вариантам осуществления настоящей технологии, твердотельный накопитель 120 хранит программные команды, пригодные для загрузки в память 130 и исполнения процессором 110 с целью определения наличия объекта. Например, программные команды могут входить в состав управляющего приложения транспортного средства, выполняемого процессором 110. Следует отметить, что компьютерная система 100 может содержать дополнительные и/или необязательные элементы (не показаны), такие как модули передачи данных по сети, модули определения местоположения и т.д.
Сетевая компьютерная среда
[00073] На фиг. 2 представлена сетевая вычислительная среда 200, подходящая для использования с некоторыми неограничивающими вариантами осуществления настоящей технологии. Сетевая вычислительная среда 200 содержит электронное устройство 210, связанное с транспортным средством 220 и/или с пользователем (не показано), связанным с транспортным средством 220 (например, с водителем транспортного средства 220). Сетевая вычислительная среда 200 также содержит сервер 235, поддерживающий связь с электронным устройством 210 через сеть 240 связи (например, Интернет и т.п., как более подробно описано ниже).
[00074] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии сетевая вычислительная среда 200 может содержать спутник GPS (не показан), передающий сигнал GPS электронному устройству 210 и/или принимающий сигнал GPS от него. Должно быть понятно, что настоящая технология не ограничивается системой GPS и что она может использовать технологию определения местоположения, отличную от системы GPS. Следует отметить, что спутник GPS может вовсе отсутствовать.
[00075] Транспортное средство 220, с которым связано электронное устройство 210, может представлять собой любое транспортное средство для отдыха или иных целей, например, личный или коммерческий автомобиль, грузовик, мотоцикл и т.п. Несмотря на то, что транспортное средство 220 изображено в виде наземного транспортного средства, это не обязательно для всех неограничивающих вариантов осуществления настоящей технологии. Например, в некоторых неограничивающих вариантах осуществления настоящей технологии транспортное средство 220 может быть водным транспортным средством, таким как катер, или летательным аппаратом, таким как дрон.
[00076] Транспортное средство 220 может управляться пользователем или представлять собой самоуправляемое транспортное средство. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии предполагается, что транспортное средство 220 может быть реализовано как беспилотный автомобиль. Следует отметить, что при этом не накладывается каких-либо ограничений на конкретные параметры транспортного средства 220, например, такие как производитель транспортного средства, модель транспортного средства, год выпуска транспортного средства, масса транспортного средства, размеры транспортного средства, распределение массы транспортного средства, площадь поверхности транспортного средства, высота транспортного средства, вид трансмиссии (например, привод на два или на четыре колеса), вид шин, тормозная система, топливная система, пробег, идентификационный номер транспортного средства и рабочий объем двигателя.
[00077] Согласно настоящей технологии, на реализацию электронного устройства 210 не накладывается каких-либо ограничений. Например, электронное устройство 210 может быть реализовано в виде блока управления двигателем транспортного средства, центрального процессора транспортного средства, навигационного устройства транспортного средства (например, TomTomTM, GarminTM), планшета, персонального компьютера, встроенного в транспортное средство 220, и т.д. Следует отметить, что электронное устройство 210 может быть связано или не связано с транспортным средством 220 постоянным образом. Дополнительно или в качестве альтернативы, электронное устройство 210 может быть реализовано в устройстве беспроводной связи, таком как мобильный телефон (например, смартфон или радиотелефон). В некоторых вариантах осуществления изобретения электронное устройство 210 содержит дисплей 270.
[00078] Электронное устройство 210 может содержать некоторые или все элементы компьютерной системы 100, представленной на фиг. 1, в зависимости от конкретного варианта осуществления. В некоторых вариантах осуществления изобретения электронное устройство 210 представляет собой бортовой компьютер и содержит процессор 110, твердотельный накопитель 120 и память 130. Иными словами, электронное устройство 210 содержит аппаратные средства и/или прикладное программное обеспечение и/или встроенное программное обеспечение либо их сочетание для обработки данных, как более подробно описано ниже.
[00079] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии сеть 240 связи представляет собой сеть Интернет. В альтернативных не имеющих ограничительного характера вариантах осуществления настоящей технологии сеть 240 связи может быть реализована как любая подходящая локальная сеть (LAN, Local Area Network), глобальная сеть (WAN, Wide Area Network), частная сеть связи и т.п. Должно быть понятно, что варианты осуществления сети 240 связи приведены лишь в иллюстративных целях. Реализация линии связи (отдельно не обозначена) между электронным устройством 210 и сетью 240 связи зависит, среди прочего, от реализации электронного устройства 210. В качестве неограничивающего примера в тех не имеющих ограничительного характера вариантах осуществления настоящей технологии, где электронное устройство 210 реализовано в виде устройства беспроводной связи, такого как смартфон или навигационное устройство, эта линия связи может быть реализована в виде беспроводной линии связи. Примеры беспроводных линий связи могут включать в себя канал сети связи 3G, канал сети связи 4G и т.п., но не ограничивается ими. В сети 240 связи также может использоваться беспроводное соединение с сервером 235.
[00080] В некоторых вариантах осуществления настоящей технологии сервер 235 реализован в виде компьютерного сервера и может содержать некоторые или все элементы компьютерной системы 100, представленной на фиг. 1. В одном не имеющем ограничительного характера примере сервер 235 реализован в виде сервера Dell™ PowerEdge™, работающего под управлением операционной системы Microsoft™ Windows Server™, но он также может быть реализован с использованием любых других подходящих аппаратных средств, прикладного программного обеспечения и/или встроенного программного обеспечения либо их сочетания. В изображенных не имеющих ограничительного характера вариантах осуществления настоящей технологии сервер 235 представляет собой одиночный сервер. В других не имеющих ограничительного характера вариантах осуществления данной технологии функции сервера 235 могут быть распределены между несколькими серверами (не показано).
[00081] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии процессор 110 устройства 210 может быть связан с сервером 235 для получения одного или нескольких обновлений. Такие обновления могут включать в себя, помимо прочего, обновления программного обеспечения, обновления карт, обновления маршрутов, обновления погоды и т.п. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии процессор 110 также может отправлять серверу 235 некоторые рабочие данные, такие как пройденные маршруты, данные о дорожном движении, рабочие характеристики и т.д. Некоторые или все такие данные, передаваемые между транспортным средством 220 и сервером 235, могут быть зашифрованы и/или обезличены.
[00082] Следует отметить, что электронное устройство 210 может использовать различные датчики и системы для сбора информации об окружении 250 транспортного средства 220. Как видно на фиг. 2, транспортное средство 220 может быть оборудовано множеством систем 280 датчиков. Следует отметить, что различные системы датчиков из множества систем 280 датчиков могут использоваться для сбора различных типов данных, касающихся окружения 250 транспортного средства 220.
[00083] В одном примере множество систем 280 датчиков может содержать различные оптические системы, включая, среди прочего, одну или несколько систем датчиков типа камеры, которые установлены на транспортном средстве 220 и связаны с процессором 110 электронного устройства 210. В целом, одна или несколько систем датчиков типа камеры может собирать данные изображения о различных частях окружения 250 транспортного средства 220. В некоторых случаях данные изображения, предоставленные одной или несколькими системами датчиков типа камеры, могут использоваться электронным устройством 210 для выполнения процедур обнаружения объекта. Например, электронное устройство 210 может подавать данные изображения, предоставленные одной или несколькими системами датчиков типа камеры, в нейронную сеть для обнаружения объектов, обученную определять положение потенциальных объектов в окружении 250 транспортного средства 220 и классифицировать эти объекты.
[00084] В другом примере множество систем 280 датчиков может содержать одну или несколько систем датчиков радарного типа, которые установлены на транспортном средстве 220 и связаны с процессором 110. В целом, одна или несколько систем датчиков радарного типа для сбора данных о различных частях окружении 250 транспортного средства 220 может использовать радиоволны. Например, одна или несколько систем датчиков радарного типа может собирать радиолокационные данные о потенциальных объектах в окружении 250 транспортного средства 220. Такие данные могут относиться к расстоянию от системы датчиков радиолокационного типа до объектов, ориентации объектов, абсолютной скорости и/или относительной скорости объектов и т.п.
[00085] Следует отметить, что множество систем 280 датчиков может содержать дополнительные типы систем датчиков помимо тех, примеры которых описаны выше, без выхода за границы настоящей технологии.
Лидарная система
[00086] В соответствии с настоящей технологией, как показано на фиг. 2, транспортное средство 220 оборудовано по меньшей мере одной лазерной системой обнаружения и определения дальности, такой как лидарная система 300, для сбора информации об окружении 250 транспортного средства 220. Несмотря на то, что здесь дано описание лишь в контексте установки лидарной системы 300 на транспортное средство 220, также предполагается, что она может работать автономно или с подключением к другой системе.
[00087] В зависимости от варианта осуществления, транспортное средство 220 может содержать больше или меньше лидарных систем 300, чем показано на иллюстрациях. В зависимости от конкретного варианта осуществления, выбор конкретных систем 280 датчиков может зависеть от конкретного варианта осуществления лидарной системы 300. Лидарная система 300 может быть установлена на транспортном средстве 220 изначально или при его модернизации в различных местах и/или в различных конфигурациях.
[00088] Например, в зависимости от реализации транспортного средства 220 и лидарной системы 300, лидарная система 300 может быть установлена на внутренней верхней части лобового стекла транспортного средства 220. Тем не менее, как показано на фиг. 2, другие места для установки лидарной системы 300, в том числе на заднем окне, боковых окнах, переднем капоте, крыше, передней решетке, переднем бампере или на боку транспортного средства 220, также входят в объем настоящего изобретения. В некоторых случаях лидарная система 300 может быть расположена в специальном кожухе, установленном сверху транспортного средства 220.
[00089] В некоторых не имеющих ограничительного характера вариантах осуществления, например, как показано на фиг. 2, одна из нескольких лидарных систем 300 установлена на крыше транспортного средства 220 с возможностью вращения. Например, лидарная система 300, установленная на транспортном средстве 220 и способная вращаться, может содержать некоторые элементы, способные поворачиваться на 360 градусов вокруг оси вращения данной лидарной системы 300. При установке с возможностью вращения лидарная система 300 может собирать данные о большинстве частей окружения 250 транспортного средства 220.
[00090] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии, например, как показано на фиг. 2, лидарные системы 300 неподвижно устанавливаются сбоку или на передней решетке. Например, лидарная система 300, установленная на транспортном средстве 220 без возможности вращения, может содержать некоторые элементы, которые не могут вращаться на 360 градусов, но обеспечивают сбор данных о заранее заданных частях окружения 250 транспортного средства 220.
[00091] Независимо от конкретного местоположения и/или конкретной конструкции лидарной системы 300, она обеспечивает сбор данных об окружении 250 транспортного средства 220, используемых, например, для построения многомерной карты объектов в окружении 250 транспортного средства 220. Далее подробно описана конструкция лидарных систем 300 для сбора данных об окружении 250 транспортного средства 220.
[00092] Следует отметить, что несмотря на то, что в приведенном здесь описании лидарная система 300 реализована как времяпролетная лидарная система и поэтому содержит соответствующие элементы, подходящие для такой реализации, без выхода за пределы настоящей технологии также возможны другие реализации лидарной системы 300. Например, в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии лидарная система 300 может быть реализована как лидарная система с частотно-модулированной непрерывной волной (Frequency-Modulated Continuous Wave, FMCW) согласно одному или нескольким вариантам реализации на основе соответствующих элементов, как описано в патентной заявке «LiDAR detection methods and systems» («Лидарные способы и системы обнаружения» того же заявителя с номером патентного поверенного 102691-023 (еще не опубликованная патентная заявка США), содержание которой полностью включено в настоящее описание посредством ссылки.
[00093] На фиг. 3 представлена схема одного конкретного варианта осуществления лидарной системы 300, реализованной в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
[00094] В общем случае лидарная система 300 содержит несколько внутренних элементов, включая (а) источник 302 света (также называемый «лазерным источником» или «источником излучения»), (б) элемент 304 расщепления луча, (в) блок 308 сканера (также называемый «узлом сканера»), (г) приемный блок 306 (также называемый «системой обнаружения», «приемным узлом» или «детектором») и (д) контроллер 310, но не ограничиваясь ими. Предполагается, что в дополнение к элементам, примеры которых перечислены выше, лидарная система 300 может содержать различные датчики (такие как датчик температуры, датчик влажности и т.д.), которые для простоты не показаны на фиг. 3.
[00095] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии один или несколько внутренних элементов лидарной системы 300 расположены в общем корпусе 330, как показано на фиг. 3. В некоторых вариантах осуществления настоящей технологии контроллер 310 может быть расположен вне общего корпуса 330 и связан с находящимися в нем элементами.
[00096] В целом лидарная система 300 работает следующим образом: источник 302 света лидарной системы 300 излучает световые импульсы, формируя выходной луч 314, блок 308 сканера сканирует выходным лучом 314 окружение 250 транспортного средства 220 для обнаружения в нем заранее неизвестных объектов (таких как объект 320) и сбора данных об этих объектах, например, для создания многомерной карты окружения 250, где объекты (включая объект 320) представлены в виде одной или нескольких точек данных. Источник 302 света и блок 308 сканера более подробно описаны ниже.
[00097] В качестве некоторых не имеющих ограничительного характера примеров, объект 320 может быть человеком или его частью, транспортным средством, мотоциклом, грузовиком, поездом, велосипедом, инвалидной коляской, прогулочной коляской, пешеходом, животным, дорожным знаком, светофором, разметкой полосы движения, разметкой дорожного покрытия, местом для парковки, опорой, ограждением, дорожным барьером, выбоиной, железнодорожным переездом, препятствием на дороге или рядом с ней, бордюром, остановившемся транспортным средством на дороге или рядом с ней, столбом освещения, домом, зданием, мусорным баком, почтовым ящиком, деревом, любым другим дорожным объектом или любой комбинацией двух или большего количества таких объектов или их частей.
[00098] Пусть объект 320 находится на расстоянии 318 от лидарной системы 300. Когда выходной луч 314 достигает объекта 320, объект 320 обычно отражает по меньшей мере часть света выходного луча 314 и некоторые из отраженных световых лучей могут возвращаться в лидарную систему 300, где они могут быть приняты в виде входного луча 316. Под отражением подразумевается, что по меньшей мере часть светового луча из выходного луча 314 отражается от объекта 320. Часть светового луча из выходного луча 314 может поглощаться или рассеиваться объектом 320.
[00099] Соответственно, входной луч 316 улавливается и фиксируется лидарной системой 300 с помощью приемного блока 306. В ответ приемный блок 306 способен формировать один или несколько репрезентативных сигналов данных. Например, приемный блок 306 может формировать выходной электрический сигнал (не показан), который представляет входной луч 316. Приемный блок 306 также может выдавать сформированный таким образом электрический сигнал в контроллер 310 для дальнейшей обработки. Наконец, путем измерения времени между излучением выходного луча 314 и приемом входного луча 316 контроллер 310 вычисляет расстояние 318 до объекта 320.
[000100] Как более подробно описано ниже, элемент 304 расщепления луча используется для направления выходного луча 314 от источника 302 света к блоку 308 сканера и для направления входного луча 316 от блока сканера к приемному блоку 306.
[000101] Использование и реализация этих элементов лидарной системы 300 в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии описаны ниже.
Источник света
[000102] Источник 302 света, связанный с контроллером 310, способен излучать свет с заданной рабочей длиной волны. Для этого в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии источник 302 света может содержать по меньшей мере один лазер, предварительно настроенный для работы на рабочей длине волны. Рабочая длина волны источника 302 света может находиться в инфракрасной, видимой и/или ультрафиолетовой частях электромагнитного спектра. Например, источник 302 света может содержать по меньшей мере один лазер с рабочей длиной волны приблизительно от 650 нм до 1150 нм. В качестве альтернативы, источник 302 света может содержать лазерный диод, настроенный на излучение световых лучей с длиной волны приблизительно от 800 нм до 1000 нм, приблизительно от 850 нм до 950 нм или приблизительно от 1300 нм до 1600 нм. В некоторых других вариантах осуществления источник 302 света может содержать светоизлучающий диод (LED).
[000103] Источник 302 света лидарной системы 300 обычно представляет собой безопасный для глаз лазер или, другими словами, лидарная система 300 может быть классифицирована как безопасная для глаз лазерная система или лазерное изделие. В целом, безопасный для глаз лазер, лазерная система или лазерное изделие может быть системой с некоторыми или всеми из следующих параметров: длиной волны излучения, средней мощностью, пиковой мощностью, пиковой интенсивностью, энергией импульса, размером луча, расходимостью луча, временем экспозиции или схемой сканирования выходного луча, при которых излучаемый этой системой свет создает малую или нулевую вероятность повреждения глаз человека.
[000104] Согласно некоторым не имеющим ограничительного характера вариантам осуществления настоящей технологии, рабочая длина волны источника 302 света может оказываться в областях электромагнитного спектра, соответствующих свету Солнца. Следовательно, в некоторых случаях солнечный свет может действовать как фоновый шум, способный заглушать световой сигнал, обнаруживаемый лидарной системой 300. Этот солнечный фоновый шум может приводить к ложным обнаружениям и/или может иным образом влиять на измерения лидарной системы 300. Несмотря на то, что в некоторых случаях может быть целесообразным увеличение отношения сигнал/шум (SNR) лидарной системы 300 путем увеличения уровня мощности выходного луча 314, в некоторых ситуациях это может оказаться нежелательным. Например, в некоторых реализациях может быть нежелательно увеличивать уровень мощности выходного луча 314 до уровня, превышающего безопасный для глаз порог.
[000105] Источник 302 света содержит импульсный лазер, необходимый для формирования, испускания или излучения импульсов света с определенной длительностью импульса. Например, в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии источник 302 света может излучать импульсы с длительностью импульса (шириной импульса) в диапазоне от 10 пс до 100 нс. В других не имеющих ограничительного характера вариантах осуществления настоящей технологии источник 302 света может излучать импульсы с частотой повторения приблизительно от 100 кГц до 5 МГц или с периодом импульса (временем между последовательными импульсами) приблизительно от 200 нс до 10 мкс. При этом в общем случае источник 302 света может формировать выходной луч 314 с любой подходящей средней оптической мощностью, а выходной луч 314 может включать в себя оптические импульсы с любой энергией импульса или пиковой оптической мощностью, подходящей для данного применения.
[000106] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии источник 302 света может содержать один или несколько лазерных диодов, включая лазерный диод Фабри-Перо, лазер с квантовыми ямами, лазер с распределенным брэгговским отражателем (DBR), лазер с распределенной обратной связью (DFB) или лазер с поверхностным излучением с вертикальным резонатором (VCSEL), но не ограничиваясь ими. В качестве примеров, лазерный диод в источнике 302 света может быть лазерным диодом на основе арсенида алюминия-галлия (AlGaAs), лазерным диодом на арсениде индия-галлия (InGaAs) или арсенид-фосфиде индия-галлия ( InGaAsP) либо любым другим подходящим лазерным диодом. Также предполагается, что источник 302 света может содержать один или несколько лазерных диодов, модулируемых по току для формирования оптических импульсов.
[000107] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии источник 302 света в общем случае способен излучать выходной луч 314, являющийся коллимированным оптическим лучом, но предполагается, что такой луч может иметь любую расходимость луча, подходящую для данного применения. В целом, расходимость выходного луча 314 является угловой мерой увеличения размера поперечного размера луча (например, радиуса луча или диаметра луча) по мере удаления выходного луча 314 от источника 302 света или от лидарной системы 300. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии выходной луч 314 может иметь практически круглое поперечное сечение.
[000108] Также предполагается, что выходной луч 314, излучаемый источником 302 света, может быть неполяризованным или случайно поляризованным, может не иметь определенной или фиксированной поляризации (например, его поляризация может меняться со временем) или может иметь определенную поляризацию (например, выходной луч 314 может быть с линейной, эллиптической или круговой поляризацией).
[000109] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии выходной луч 314 и входной луч 316 могут быть по существу коаксиальными. Другими словами, выходной луч 314 и входной луч 316 могут частично перекрываться или иметь общую ось распространения, так что входной луч 316 и выходной луч 314 распространяются по существу по одному оптическому пути (но в противоположных направлениях). Тем не менее, в других не имеющих ограничительного характера вариантах осуществления настоящей технологии выходной луч 314 и входной луч 316 могут не быть коаксиальными или, другими словами, могут не перекрываться или не иметь общей оси распространения внутри лидарной системы 300 без отклонения от объема настоящей технологии.
[000110] Следует отметить, что в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии источник 302 света может поворачиваться, например, на 360 градусов или меньше, вокруг оси вращения (не показана) лидарной системы 300, если лидарная система 300 выполнена с возможностью вращения. Тем не менее, в других вариантах осуществления источник 302 света может быть неподвижным, даже если лидарная система 300 реализована с возможностью вращения, не выходя за рамки настоящей технологии.
Элемент расщепления луча
[000111] На фиг. 3 изображен элемент 304 расщепления луча, расположенный в корпусе 330. Например, как упоминалось выше, элемент 304 расщепления луча способен направлять выходной луч 314 от источника 302 света к блоку 308 сканера. Элемент 304 расщепления луча также предназначен и используется для направления входного луча 316, отраженного от объекта 320, в приемный блок 306 для дальнейшей обработки контроллером 310.
[000112] Тем не менее, в соответствии с другими не имеющими ограничительного характера вариантами осуществления настоящей технологии, элемент 304 расщепления луча может разделять выходной луч 314 на по меньшей мере две части меньшей интенсивности, включая сканирующий луч (отдельно не показан), используемый для сканирования окружения 250 лидарной системы 300, и опорный луч (отдельно не показан), направляемый в приемный блок 306.
[000113] Другими словами, в этих вариантах осуществления можно сказать, что элемент 304 расщепления луча делит интенсивность (оптическую мощность) выходного луча 314 между сканирующим лучом и опорным лучом. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии элемент 304 расщепления луча делит поровну интенсивность выходного луча 314 между сканирующим лучом и опорным лучом. В других не имеющих ограничительного характера вариантах осуществления настоящей технологии элемент 304 расщепления луча может делить интенсивность выходного луча 314 между сканирующим лучом и опорным лучом в любой заранее заданной пропорции. Например, элемент 304 расщепления луча может использовать до 80% интенсивности выходного луча 314 для формирования сканирующего луча, а оставшуюся часть до 20% интенсивности выходного луча 314 - для формирования опорного луча. В других не имеющих ограничительного характера вариантах осуществления настоящей технологии элемент 304 расщепления луча может изменять коэффициент деления при формировании сканирующего луча (например, от 1% до 95% интенсивности выходного луча 314).
[000114] Кроме того, следует отметить, что некоторая часть (например, до 10%) интенсивности выходного луча 314 может поглощаться материалом элемента 304 расщепления луча, что зависит от его конструкции.
[000115] В зависимости от реализации лидарной системы 300, элемент 304 расщепления луча может быть реализован в различных формах, включая элемент расщепления луча на основе стеклянной призмы, элемент расщепления луча на основе полусеребряного зеркала, элемент расщепления луча на основе дихроичной зеркальной призмы, элемент расщепления луча на основе волоконной оптики и т.п., но не ограничиваясь ими.
[000116] Таким образом, согласно не имеющим ограничительного характера вариантам осуществления настоящей технологии, неполный список регулируемых параметров, связанных с элементом 304 расщепления луча, в зависимости от его применения, может включать в себя, например, рабочий диапазон длин волн, который может варьироваться от конечного числа длин волн до более широкого светового спектра (например, от 1200 до 1600 нм), угол падения входящего луча, наличие или отсутствие поляризации и т.п.
[000117] В конкретном не имеющим ограничительного характера примере элемент 304 расщепления луча может быть реализован как волоконно-оптический элемент расщепления луча, например, поставляемый компанией OZ Optics Ltd., 219 Westbrook Rd Ottawa, Ontario K0A 1L0 Canada (Канада). Следует понимать, что элемент 304 расщепления луча может быть реализован в виде любого другого подходящего оборудования.
Внутренние пути луча
[000118] Как схематично показано на фиг. 3, лидарная система 300 формирует несколько внутренних путей 312 луча, по которым проходит выходной луч 314 (формируемый источником 302 света) и входной луч 316 (принимаемый из окружения 250). В частности, свет распространяется по внутренним путям 312 луча следующим образом: свет от источника 302 света проходит через элемент 304 расщепления луча к блоку 308 сканера, а блок 308 сканера, в свою очередь, направляет выходной луч 314 наружу в направлении окружения 250.
[000119] Подобным образом входной луч 316 следует по множеству внутренних путей 312 луча к приемному блоку 306. В частности, входной луч 316 направляется блоком 308 сканера в лидарную систему 300 через элемент 304 расщепления луча в сторону приемного блока 306. В некоторых реализациях лидарная система 300 может иметь пути лучей, направляющие входной луч 316 непосредственно из окружения 250 в приемный блок 306 (без прохождения входного луча 316 через блок 308 сканера).
[000120] Следует отметить, что в различных неограничивающих вариантах осуществления настоящей технологии множество внутренних путей 312 луча может содержать несколько оптических элементов. Например, лидарная система 300 может содержать один или несколько оптических элементов, предназначенных для обработки, изменения формы, фильтрации, модификации, управления или направления выходного луча 314 и/или входного луча 316. Например, лидарная система 300 может содержать одно или несколько устройств из числа линз, зеркал, фильтров (например, полосовых или интерференционных фильтров), оптических волокон, циркуляторов, светоделителей, поляризаторов, поляризационных светоделителей, волновых пластин (например, полуволновых или четвертьволновых пластин), дифракционных элементов, микроэлектромеханических (МЕМ) элементов, коллимирующих элементов или голографических элементов.
[000121] Предполагается, что в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии один внутренний путь луча и другой внутренний путь луча из множества внутренних путей 312 луча могут совместно использовать некоторые общие оптические элементы, тем не менее, это не обязательно для каждого варианта осуществления настоящей технологии.
Блок сканера
[000122] В общем случае блок 308 сканера направляет выходной луч 314 в одном или нескольких направлениях в окружение 250. Блок 308 сканера связан с контроллером 310. Таким образом, контроллер 310 позволяет управлять блоком 308 сканера, чтобы направлять выходной луч 314 в требуемом направлении и/или согласно заранее заданной схемы сканирования. В целом, в контексте настоящего описания «схема сканирования» может относиться к схеме или пути, по которому выходной луч 314 направляется блоком 308 сканера во время работы.
[000123] В некоторых неограничивающих вариантах осуществления настоящей технологии контроллер 310 обеспечивает сканирование выходящим из блока 308 сканера выходным лучом 314 во множестве горизонтальных угловых диапазонов и/или вертикальных угловых диапазонов. Суммарный угол, в котором блок 308 сканера сканирует выходным лучом 314, называется здесь полем обзора. Предполагается, что конкретное расположение, ориентация и/или угловые диапазоны могут зависеть от конкретной реализации лидарной системы 300. Поле обзора обычно содержит несколько интересующих областей, определяемых как части поля обзора, способные содержать, например, интересующие объекты. В некоторых реализациях блок 308 сканера обеспечивает дополнительное обследование выбранной интересующей области 325. Интересующая область 325 лидарной системы 300 может относиться к площади, объему, области, угловому диапазону и/или части (нескольким частям) окружения 250, в котором лидарная система 300 может выполнять сканирование и/или получать данные.
[000124] Следует отметить, что местоположение объекта 320 в окружении 250 транспортного средства 220 может перекрываться, охватываться или заключаться частично или полностью в интересующей области 325 лидарной системы 300.
[000125] Согласно некоторым не имеющим ограничительного характера вариантам осуществления настоящей технологии, блок 308 сканера может сканировать выходным лучом 314 по горизонтали и/или по вертикали и, таким образом, интересующая область 325 лидарной системы 300 может иметь горизонтальное направление и вертикальное направление. Например, интересующая область 325 может быть определена углом 45 градусов в горизонтальном направлении и углом 45 градусов в вертикальном направлении. В некоторых реализациях разные оси сканирования могут иметь разную ориентацию.
[000126] В некоторых вариантах осуществления блок 308 сканера содержит зеркало 309, связанное с гальванометром (отдельно не показано), обеспечивающим управление им. Соответственно, контроллер 310 через гальванометр обеспечивает вращение зеркала вокруг связанной с ним перпендикулярной оси, сканируя интересующую область 325 в соответствии с заранее заданной схемой сканирования.
[000127] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии блок 308 сканера может дополнительно содержать несколько других оптических и/или механических элементов для сканирования выходным лучом 314. Например, блок 308 сканера может содержать одно или несколько устройств из числа зеркал, призм, линз, микроэлектромеханических элементов, пьезоэлектрических элементов, оптических волокон, делителей, дифракционных элементов, коллимирующих элементов и т.п. Следует отметить, что блок 308 сканера может также содержать один или несколько дополнительных исполнительных механизмов (отдельно не показаны), приводящих в действие некоторые другие оптические элементы, например, для вращения, наклона, поворота или углового перемещения вокруг одной или нескольких осей.
[000128] Таким образом, лидарная система 300 может использовать заранее заданную схему сканирования для формирования облака точек, по существу покрывающего интересующую область 325 лидарной системы 300. Как более подробно описано ниже, это облако точек лидарной системы 300 может использоваться для представления многомерной карты объектов в окружении 250 транспортного средства 220.
[000129] Как должно быть понятно из приведенного ниже описания, в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии сканирующая поверхность зеркала может быть связана с соответствующей частотой сканирования.
Приемный блок
[000130] Согласно некоторым не имеющим ограничительного характера вариантам осуществления настоящей технологии, приемный блок 306 связан с контроллером 310 и может быть реализован множеством способов. В соответствии с настоящей технологией, приемный блок 306 содержит фотодетектор, но может содержать фотоприемник, оптический приемник, оптический датчик, детектор, оптический детектор, оптическое волокно и т.п., не ограничиваясь ими. Как упомянуто выше, в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии приемный блок 306 может получать или обнаруживать весь входной луч 316 или его часть и формировать электрический сигнал, соответствующий входному лучу 316. Например, если входной луч 316 включает в себя оптический импульс, приемный блок 306 может формировать импульс электрического тока или напряжения, соответствующий оптическому импульсу, обнаруженному приемным блоком 306.
[000131] Предполагается, что в различных не имеющих ограничительного характера вариантах осуществления настоящей технологии приемный блок 306 может быть реализован с одним или несколькими лавинными фотодиодами (APD), одним или несколькими однофотонными лавинными диодами (SPAD), одним или несколькими PN-фотодиодами (например, с фотодиодной структурой, образованной полупроводником p-типа и полупроводником n-типа), одним или несколькими PIN-фотодиодами (например, с фотодиодной структурой, образованной нелегированной полупроводниковой областью, расположенной между областями p-типа и n-типа) и т.п.
[000132] В некоторых не имеющих ограничительного характера вариантах осуществления приемный блок 306 может также содержать схему, выполняющую усиление сигнала, выборку, фильтрацию, обработку сигнала, аналого-цифровое преобразование, временное цифровое преобразование, обнаружение импульсов, обнаружение порога, обнаружение нарастающего фронта, обнаружение спадающего фронта и т.п. Например, приемный блок 306 может содержать электронные элементы для преобразования принятого фототока (например, тока, создаваемого диодом APD в ответ на принятый оптический сигнал) в сигнал напряжения. Приемный блок 306 может также содержать дополнительную схему для формирования аналогового или цифрового выходного сигнала, соответствующего одной или нескольким характеристикам (например, переднему фронту, заднему фронту, амплитуде, длительности и т.п.) принятого оптического импульса.
Контроллер
[000133] В зависимости от реализации, контроллер 310 может содержать один или несколько процессоров, специализированную интегральную схему (ASIC), программируемую пользователем вентильную матрицу (FPGA) и/или другие подходящие схемы. Контроллер 310 также может содержать энергонезависимую машиночитаемую память для хранения инструкций, выполняемых контроллером 310, а также данных, которые контроллер 310 может формировать на основе сигналов, полученных от других внутренних элементов лидарной системы 300, и на основе сигналов, которые он может передавать другим внутренним элементам лидарной системы 300. Память может содержать энергозависимые (например, RAM) и/или энергонезависимые (например, флэш-память, жесткий диск) элементы. Контроллер 310 может собирать данные во время работы и сохранять их в памяти. Например, такие данные, сформированные контроллером 310, могут указывать на точки данных в облаке точек лидарной системы 300.
[000134] Предполагается, что в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии контроллер 310 может быть реализован подобно электронному устройству 210 и/или компьютерной системе 100, не выходя за рамки настоящей технологии. В дополнение к сбору данных от приемного блока 306, контроллер 310 также может обеспечивать управляющие сигналы и возможность получения диагностических данных от источника 302 света и блока 308 сканера.
[000135] Как указано выше, контроллер 310 связан с источником 302 света, блоком 308 сканера и приемным блоком 306. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии контроллер 310 может обеспечивать прием электрических запускающих импульсов от источника 302 света, где каждый электрический запускающий импульс соответствует излучению оптического импульса источником 302 света. Контроллер 310 может дополнительно обеспечивать инструкции, управляющий сигнал и/или сигнал запуска для источника 302 света, указывающий на то, когда источник 302 света должен формировать оптические импульсы, соответствующие, например, выходному лучу 314.
[000136] Кроме того, контроллер 310 может отправлять электрический запускающий сигнал, включающий в себя электрические импульсы, при этом источник 302 света излучает оптический импульс, представленный выходным лучом 314, в ответ на каждый импульс этого электрического запускающего сигнала. Также предполагается, что контроллер 310 может изменять в источнике 302 света одну или несколько характеристик выходного луча 314, создаваемого источником 302 света, таких как частота, период, длительность, энергия импульса, пиковая мощность, средняя мощность и длина волны оптических импульсов.
[000137] В соответствии с настоящей технологией, контроллер 310 позволяет определять значения «времени пролета» для оптического импульса с целью вычисления расстояния между лидарной системой 300 и одним или несколькими объектами в поле обзора, как это описано ниже. Время пролета основано на информации о времени, связанной (а) с первым моментом времени, когда оптический импульс (например, выходной луч 314) был испущен источником 302 света, и (б) со вторым моментом времени, когда часть этого оптического импульса (например, из входного луча 316) была обнаружена или принята приемным блоком 306. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии первый момент может указывать на момент времени, когда контроллер 310 излучает соответствующий электрический импульс, связанный с оптическим импульсом, а второй момент времени может указывать на момент времени, когда контроллер 310 принимает от приемного блока 306 электрический сигнал, формируемый в ответ на прием части оптического импульса от входного луча 316.
[000138] В других не имеющих ограничительного характера вариантах осуществления настоящей технологии, где элемент 304 расщепления луча обеспечивает разделение выходного луча 314 на сканирующий луч (не показан) и опорный луч (не показан), первый момент времени может быть моментом времени приема от приемного блока 306 первого электрического сигнала, формируемого в ответ на прием части опорного луча. Соответственно, в этих вариантах осуществления второй момент времени может быть определен как момент времени приема контроллером 310 от приемного блока 306 второго электрического сигнала, формируемого в ответ на прием другой части данного оптического импульса из входного луча 316.
[000139] В соответствии с настоящей технологией, контроллер 310 позволяет определять на основе первого момента времени и второго момента времени значение времени пролета и/или значение фазового сдвига для излучаемого импульса выходного луча 314. Величина времени T пролета, в определенном смысле, является временем пути в обе стороны для излучаемого импульса, требуемым для прохождения от лидарной системы 300 к объекту 320 и обратно в лидарную систему 300. Таким образом, контроллер 310 позволяет определять расстояния 318 в соответствии со следующим уравнением:
где D - расстояние 318, T - значение времени пролета, c - скорость света (приблизительно 3×108 м/с).
[000140] Как упоминалось выше, лидарная система 300 может использоваться для определения расстояния 318 до одного или нескольких других потенциальных объектов, расположенных в окружении 250 транспортного средства. Путем сканирования выходного луча 314 по интересующей области 325 лидарной системы 300 в соответствии с заранее заданной схемой сканирования, контроллер 310 определяет расстояния (подобные расстоянию 318) до соответствующих точек данных в интересующей области 325 лидарной системы 300. В результате контроллер 310 обычно способен представить эти последовательно зафиксированные точки (например, облака точек) в виде многомерной карты. В некоторых реализациях данные, относящиеся к определенному времени пролета и/или к расстояниям до объектов, могут представляться в разных форматах данных.
[000141] Такая многомерная карта может использоваться электронным устройством 210 для обнаружения или иного рода идентификации объектов либо для определения формы потенциальных объектов или расстояния до них в интересующей области 325 лидарной системы 300. Предполагается, что лидарная система 300 может обеспечивать многократную или итеративную фиксацию и/или формирование облаков точек с любой скоростью, подходящей для данного применения.
[000142] Фиг. 4-6 иллюстрируют конкретные варианты осуществления блока 308 сканера, где блок 308 сканера содержит сканирующую поверхность 350, которая является отражающей и предназначена для регулирования распределения точек данных в облаке точек в поле обзора (обозначено на фиг. 7 и фиг. 8 в виде точек 352 данных, образованных распространяющимися лучами 354 в поле 356 обзора). В некоторых вариантах осуществления блок 308 сканера обеспечивает более равномерное распределение точек 352 данных в пределах поля 356 обзора (проиллюстрировано на фиг. 7 и 8) по сравнению с распределением точек данных, формируемых блоками сканера с линейными и/или плоскими сканирующими поверхностями предшествующего уровня техники (например, как показано на фиг. 9 и фиг. 10). В некоторых вариантах осуществления блок 308 сканера обеспечивает по существу равномерное распределение точек 352 данных в пределах поля 356 обзора. Следует отметить, что точки 352 данных на чертежах показаны для поля 356 обзора, но распределение точек 352 данных также применимо к интересующей области 325 в определенных вариантах осуществления.
[000143] Одним из примеров блока сканера предшествующего уровня техники с плоской сканирующей поверхностью является колеблющееся зеркало. Разработчики установили, что такие блоки сканера с плоскими отражающими поверхностями предшествующего уровня техники (фиг. 9) формируют распределение точек 352 данных, не являющееся однородным (фиг. 10). Точки 352 данных имеют тенденцию быть ближе друг к другу в крайних/периферийных частях 360 поля 356 обзора по сравнению с центральной частью 362 поля 356 обзора. Это может быть связано с изменением скорости движения сканирующей поверхности 358 колеблющегося зеркала в зависимости от расстояния от оси 364 вращения зеркала. Как показано на фиг. 6, для колеблющегося зеркала с осью 364 вращения, расположенной по центру, поверхность сканирования 358 движется быстрее в центральной части 366 поверхности 358 сканирования по сравнению с ее скоростью движения на концевых частях 368 поверхности сканирования 358. Концевые части 368 имеют тенденцию замедляться при изменении направления колебаний, создавая более высокую плотность точек 352 данных в периферийных частях 360 поля 356 обзора.
[000144] Поэтому разработчики стремились компенсировать распределение точек данных, вызванное переменной скоростью движения различных частей сканирующей поверхности во время колебаний. Для этого разработчики создали блок 308 сканера с неплоской поверхностью 350 сканирования (фиг. 4 и 5) согласно некоторым не имеющим ограничительного характера вариантам осуществления настоящей технологии. Под неплоской поверхностью 350 сканирования в некоторых вариантах осуществления понимается поверхность 350 сканирования, имеющая отражающую поверхность, не лежащую в одной плоскости. В некоторых вариантах осуществления поверхность 350 сканирования имеет изогнутый профиль. В некоторых вариантах осуществления поверхность 350 сканирования имеет в целом вогнутую форму (фиг. 4). В некоторых других вариантах осуществления поверхность 350 сканирования имеет в целом выпуклую форму (фиг. 5). В некоторых вариантах реализации (не показаны) поверхность 350 сканирования содержит вогнутую и выпуклую части. В некоторых вариантах реализации (не показаны) поверхность 350 сканирования не является ни вогнутой, ни выпуклой, но имеет по меньшей мере одну неплоскую часть (например, волнообразной формы).
[000145] Как можно видеть на увеличенном представлении сканирующей поверхности 350 на фиг. 4, а также на фиг. 6, где показан вид сверху сканирующей поверхности 350, сканирующая поверхность 350 содержит множество сегментов 370 отражающей поверхности, на которые выходной луч 314 может падать и отражаться в виде распространяющегося луча 354. Сегменты 370 отражающей поверхности показаны на фиг. 6 как расположенные в виде сетки, но это лишь пример конструкции. Сегменты 370 отражающей поверхности могут иметь любой размер, любую форму и располагаться любым образом, подходящим для конкретной схемы сканирования. Каждый сегмент 370 отражающей поверхности можно рассматривать как имеющий положение 376 на поверхности 350 сканирования.
[000146] В некоторых вариантах реализации некоторые из сегментов 370 отражающей поверхности являются линейными и ориентированы под углом 378 относительно опорного элемента 380. Угол 378 также называется здесь «опорным углом». Термин «опорный» относится к опорной плоскости (или нескольким плоскостям) или к опорному направлению. В некоторых вариантах реализации некоторые из сегментов 370 отражающей поверхности расположены под углом друг к другу. Выражение «под углом» означает, что сегменты 370 отражающей поверхности не находятся в одной плоскости. Угол между двумя сегментами 370 отражающей поверхности может быть в диапазоне от приблизительно 0,1° до приблизительно 180° или (более предпочтительно) от приблизительно 0° до приблизительно 90°. Выражение «под углом» также означает, что в некоторых вариантах осуществления опорный угол 378 некоторых сегментов 370 отражающей поверхности отличается от опорного угла 378 других сегментов 370 отражающей поверхности. Другими словами, топология сканирующей поверхности 350 оказывается неплоской из-за различия опорных углов 378 разных сегментов 370 отражающей поверхности.
[000147] Количество сегментов 370 отражающей поверхности сканирующей поверхности 350 не ограничено. В некоторых вариантах осуществления количество сегментов 370 отражающей поверхности достаточно велико, чтобы сгладить результирующую кривизну сканирующей поверхности 350, которую можно рассматривать как огибающую кривую. Количество сегментов 370 отражающей поверхности, их размер, форма и относительные опорные углы 378 определяются согласно схеме сканирования и распределению точек 352 данных схемы сканирования, требующей регулирования. Другими словами, конструкция сегментов 370 отражающей поверхности 350 для нелинейного сканирования определяется на основании скорости колебаний блока 308 сканера и/или размеров всей поверхности 350 сканирования. Некоторые из сегментов 370 отражающей поверхности могут обеспечивать регулирования распределения точек 352 данных в поле 356 обзора путем регулирования угла 382 распространения выходного луча 314 (также называемого «углом 382 отражения») в поле 356 обзора. Следует понимать, что в некоторых вариантах осуществления лишь часть точек 352 данных может требовать перераспределения для получения по существу однородного распределения точек 352 данных по всему полю 356 обзора. В этих случаях только сегменты 370 отражающей поверхности, связанные с требующими перераспределения точками 352 данных, могут иметь опорный угол 378, отличный от опорного угла линейной поверхности. Другими словами, поверхность 350 сканирования может содержать по меньшей мере несколько сегментов 370 отражающей поверхности, предназначенных для перераспределения положения соответствующих точек данных с целью получения однородного распределения точек 352 данных.
[000148] На фиг. 11 показано распределение точек 352 данных в поле 356 обзора в зависимости от времени сканирования для плоских сканирующих поверхностей 358 ( ) предшествующего уровня техники по сравнению с неплоскими сканирующими поверхностями 350 (
) предшествующего уровня техники по сравнению с неплоскими сканирующими поверхностями 350 ( ) для вариантов осуществления настоящей технологии. Угол β представляет собой угол колебаний (также называемый здесь «углом поворота») сканирующих поверхностей 358, 350. Как можно видеть, при колебаниях блока 308 сканера угол колебаний поверхностей 358, 350 сканирования изменяется. В результате для поверхности 358 линейного сканирования точки данных распределяются неравномерно по периоду колебания. В некоторых вариантах осуществления с неплоской поверхностью 350 сканирования согласно настоящей технологии сегменты 370 отражающей поверхности расположены так, чтобы отражать выходной луч 314 в виде распространяющихся лучей 354 с углами 382 распространения, компенсирующими неравномерность распределения.
) для вариантов осуществления настоящей технологии. Угол β представляет собой угол колебаний (также называемый здесь «углом поворота») сканирующих поверхностей 358, 350. Как можно видеть, при колебаниях блока 308 сканера угол колебаний поверхностей 358, 350 сканирования изменяется. В результате для поверхности 358 линейного сканирования точки данных распределяются неравномерно по периоду колебания. В некоторых вариантах осуществления с неплоской поверхностью 350 сканирования согласно настоящей технологии сегменты 370 отражающей поверхности расположены так, чтобы отражать выходной луч 314 в виде распространяющихся лучей 354 с углами 382 распространения, компенсирующими неравномерность распределения.
[000149] Способ определения конструкции (например, положения 376 и опорного угла 378) сегментов 370 отражающей поверхности вариантов осуществления поверхности 350 сканирования изложен ниже.
[000150] Не ограничиваясь какой-либо теорией, следует отметить, что угол распространения распространяющегося луча 354 на отражающей поверхности зеркала пропорционален удвоенному углу наклона зеркала. Под углом наклона подразумевается угол относительно опорной плоскости, например, опорного элемента 380. Если зеркало является плоским, угол смещения поверхности зеркала (т.е. угол колебания) равен углу смещения зеркала:
 pp = d ,
pp = d ,
где pp - угол смещения плоского зеркала.
[000151] Тем не менее, это не так при криволинейном зеркале. Если зеркало изогнуто, угол смещения поверхности зеркала определяется углом смещения зеркала в сумме с кривизной зеркала:
pk = d + c ,
где pk - угол смещения криволинейного зеркала. Следовательно, форма поверхности сканирования может влиять на схему сканирования.
[000152] Связь между кривизной, углом падения и углом отражения в целом можно определить как
 ,
,
где - угол отражения, β - кривизна сканирующей поверхности. Следовательно, можно сказать, что угол отражения на изогнутой поверхности сканирования пропорционален двукратной кривизне поверхности сканирования.
[000153] Таким образом, в случае неравномерного распределения точек данных (также называемого здесь неравномерной схемой сканирования), как показано на фиг. 10, можно сделать распределение точек 352 данных более равномерным, если регулировать углы 382 распространения некоторых из распространяющихся лучей 354 (показаны сплошными линиями). Требуемые регулируемые положения распространяющихся лучей обозначены пунктирными линиями.
[000154] Таким образом, положение 376 и опорный угол 378 сегментов 370 отражающей поверхности определяются в соответствии с распределением точек 352 данных по умолчанию на основе движения сканирующей поверхности 350 и ее размера, требуемого распределения точек 352 данных и угла 382 распространения распространяющегося луча 354, необходимого для получения требуемого распределения.
[000155] В некоторых вариантах осуществления (как показано на фиг. 4 и фиг. 5) блок 308 сканера может быть частично реализован в виде колеблющегося зеркала 384, такого как колеблющееся гальванометрическое зеркало, способное вращаться вокруг оси 386 колебания.
[000156] В некоторых вариантах осуществления, как показано на фиг. 12, блок 308 сканера может быть частично реализован в виде призмы 388 с несколькими гранями 390. По меньшей мере одна из граней призмы 390 является поверхностью 350 сканирования, содержащей множество сегментов 372 отражающей поверхности. Призма 388 может быть реализована с возможностью вращения вокруг оси 392 вращения.
[000157] В некоторых вариантах осуществления блок 308 сканера может содержать как призму 388, так и колеблющееся зеркало 384.
[000158] В определенных вариантах осуществления любой из вышеупомянутых версий блока 308 сканера по меньшей мере два сегмента из сегментов 370 отражающей поверхности могут быть выполнены из разных материалов, имеющих разные оптические свойства, или могут содержать один или несколько слоев из разных материалов. Например, различные материалы могут изменять оптические свойства выходного луча 314, такие как его поляризация, длина волны, частота и т.д. Как следствие, результирующие распространяющиеся лучи 354 могут иметь разные оптические свойства.
[000159] Следует понимать, что в некоторых вариантах осуществления направление выходного луча 314 не связано с блоком 308 сканера. Другими словами, выходной луч 314 направляется на сегмент 370 отражающей поверхности путем перемещения контроллером 310 в соответствии с заранее определенной последовательностью.
[000160] В некоторых вариантах осуществления один или несколько сегментов 370 отражающей поверхности могут индивидуально перемещаться для изменения соответствующего опорного угла 378. В этом отношении в определенных вариантах осуществления один или несколько сегментов 370 отражающей поверхности имеют изменяемую конструкцию, например, в отношении формы, угла и т.д. Один или несколько сегментов отражающей поверхности могут быть изготовлены из гибкого материала с покрытием. Один или несколько сегментов отражающей поверхности могут содержать несколько различных множеств сегментов и могут использоваться для изменения поля обзора. Изменение отдельных сегментов 370 отражающей поверхности или множества сегментов 370 отражающей поверхности может выполняться с использованием системы механической регулировки или пьезоэлектрической системы. В некоторых вариантах осуществления изменение отдельных сегментов 370 отражающей поверхности может выполняться путем качания или колебания матрицы микромеханических зеркал. Матрица микромеханических зеркал может быть реализована, например, в виде цифрового микрозеркального устройства.
[000161] Контроллер 310 реализует способ 1000 функционирования лидарной системы, такой как лидарная система 300, обеспечивая формирование схемы сканирования с по существу однородным распределением точек 352 данных в определенных вариантах осуществления.
Компьютерные способы
[000162] На фиг. 14 представлена блок-схема способа 1000 согласно не имеющим ограничительного характера вариантам осуществления настоящей технологии. Способ 1000 может выполняться контроллером 310.
[000163] Шаг 1010: обеспечение испускания источником излучения выходных лучей по внутреннему пути излучения лидарной системы.
[000164] Способ 1000 включает в себя обеспечение испускания источником излучения выходных лучей по внутреннему пути излучения лидарной системы. Лидарная система может содержать вариант осуществления лидарной системы 300, включая источник 302 света и выходной луч 314.
[000165] Шаг 1020: обеспечение направления сканером лидарной системы выходных лучей в поле обзора лидарной системы в виде распространяющихся лучей под таким углом распространения, который нужен для регулирования распределения точек данных в схеме сканирования поля обзора.
[000166] Для шага 1020 сканер может содержать блок 308 сканера согласно настоящей технологии и множество сегментов 370 отражающей поверхности, причем каждый сегмент 370 отражающей поверхности имеет заданное положение 376 на поверхности 350 сканирования и заданный угол 378 относительно опорной поверхности 380 для отражения выходных лучей 314 в виде распространяющегося луча 354 с заданным углом 382 распространения.
[000167] В некоторых вариантах осуществления положение 376 и угол 378 по меньшей мере некоторых сегментов из множества сегментов 370 отражающей поверхности позволяют обеспечить однородную плотность точек 352 данных во внешней и центральной частях 360, 362 схемы сканирования.
[000168] В некоторых вариантах осуществления контроллер 310 обеспечивает выходные лучи 314, падающие на набор сегментов 370 отражающей поверхности, в соответствии с заранее определенной последовательностью.
[000169] На этом способ 1020 завершается.
[000170] Согласно другому аспекту реализован способ определения измененной конфигурации блока 308 сканера для обеспечения однородной схемы сканирования. Способ включает в себя определение контроллером, таким как контроллер 310, схемы предварительного сканирования, формируемой поверхностью предварительного сканирования блока сканера. Если эта предварительная схема сканирования не является однородной, способ дополнительно включает в себя определение контроллером требуемого регулирования угла 382 распространения сканирующего луча для создания однородной схемы сканирования, определение того, на какую часть поверхности для предварительного сканирования блока сканера должен падать выходной луч для его отражения в виде распространяющегося луча, и изменение угла идентифицированной части поверхности предварительного сканирования для достижения требуемого регулирования распространяющегося луча.
[000171] Таким образом, некоторые не имеющие ограничительного характера варианты осуществления лидарной системы 300 позволяют обеспечить однородную схему сканирования поля обзора или интересующей области, способную улучшить обнаружение объектов вокруг транспортного средства 220. В частности, обнаружение объектов при этом оказывается одинаково точным во всем поле обзора или во всей интересующей области, позволяя избегать «слепых зон».
[000172] Соответственно, эти неограничивающие варианты осуществления лидарной системы 300 позволяют фиксировать более надежные данные об одном или нескольких объектах в окружении 250 транспортного средства, например, обеспечивая (1) формирование более точной многомерной карты объектов и (2) более эффективное управление (например, планирование траектории движения) транспортным средством 220, в частности, с точки зрения предотвращения столкновений с объектами в окружении 250.
[000173] Для специалиста в данной области могут быть очевидными возможные изменения и усовершенствования описанных выше вариантов осуществления настоящей технологии. Предшествующее описание приведено лишь в иллюстративных целях, а не для ограничения объема изобретения. Объем охраны настоящей технологии определяется исключительно объемом приложенной формулы изобретения.
[000174] Несмотря на то, что описанные выше варианты реализации приведены со ссылкой на конкретные шаги, выполняемые в определенном порядке, должно быть понятно, что эти шаги могут быть объединены, разделены или что их порядок может быть изменен без отклонения от настоящей технологии. Соответственно, порядок и группировка шагов не носят ограничительного характера для настоящей технологии.
[000175] Варианты реализации
[000176] 1. Лидарная система для обнаружения объектов в окружающем пространстве автономного транспортного средства, содержащая: источник излучения, испускающий выходные лучи по внутреннему пути излучения; и сканер, расположенный на внутреннем пути излучения и направляющий выходные лучи в поле обзора вокруг транспортного средства в виде множества точек данных в схеме сканирования, при этом сканер содержит сканирующую поверхность, имеющую неплоский профиль и содержащую множества сегментов отражающей поверхности, причем каждый сегмент отражающей поверхности характеризуется положением на поверхности сканирования и углом относительно опорного элемента для отражения выходных лучей в виде распространяющегося луча с заданным углом распространения, при этом положение и угол каждого сегмента отражающей поверхности позволяют регулировать распределение точек данных в схеме сканирования по полю обзора.
[000177] 2. Лидарная система по вар. 1, в которой положение и угол по меньшей мере некоторых сегментов из множества сегментов отражающей поверхности обеспечивают однородное распределение точек данных в по меньшей мере части схемы сканирования.
[000178] 3. Лидарная система по вар. 2, в которой положение и угол по меньшей мере некоторых сегментов из множества сегментов отражающей поверхности обеспечивают однородное распределение плотности точек данных во внешней части и в центральной части схемы сканирования.
[000179] 4. Лидарная система по любому из вар. 1-3, в которой положение и угол по меньшей мере некоторых сегментов из множества сегментов отражающей поверхности позволяют компенсировать разницу в частоте сканирования на краю поверхности сканирования по сравнению с центром поверхности сканирования для регулирования распределения точек данных.
[000180] 5. Лидарная система по любому из вар. 1-4, в которой по меньшей мере один сегмент отражающей поверхности из множества сегментов отражающей поверхности является линейным.
[000181] 6. Лидарная система по любому из вар. 1-4, в которой по меньшей мере один сегмент отражающей поверхности из множества сегментов отражающей поверхности является криволинейным.
[000182] 7. Лидарная система по любому из вар. 1-6, в которой множество сегментов отражающей поверхности представляет сканирующую поверхность выпуклой формы.
[000183] 8. Лидарная система по любому из вар. 1-6, в которой множество сегментов отражающей поверхности представляет сканирующую поверхность вогнутой формы.
[000184] 9. Лидарная система по любому из вар. 1-8, в которой сканер представляет собой колеблющееся гальванометрическое зеркало.
[000185] 10. Лидарная система по любому из вар. 1-8, в которой сканер представляет собой вращающуюся призму, а сканирующая поверхность представляет собой грань этой вращающейся призмы.
[000186] 11. Лидарная система по любому из вар. 1-8, в которой сканер содержит вращающуюся призму и зеркало, при этом сканирующая поверхность содержит по меньшей мере одну грань вращающейся призмы и по меньшей мере одну поверхность зеркала.
[000187] 12. Лидарная система по любому из вар. 1-11, в которой по меньшей мере два сегмента из множества сегментов отражающей поверхности расположены под углом друг к другу.
[000188] 13. Лидарная система по любому из вар. 1-12, в которой по меньшей мере два сегмента из множества сегментов отражающей поверхности изготовлены из разных материалов для придания разных оптических свойств соответствующим распространяющимся лучам.
[000189] 14. Лидарная система по любому из вар. 1-13, в которой множество сегментов отражающей поверхности образует линейную скругленную поверхность.
[000190] 15. Лидарная система по любому из вар. 1-14, дополнительно содержащая контроллер, связанный с источником излучения и со сканером и обеспечивающий падение выходного луча на заданный сегмент отражающей поверхности.
[000191] 16. Лидарная система по вар. 15, в которой контроллер позволяет перемещать сканер для избирательного контакта выходных лучей с заданным сегментом отражающей поверхности.
[000192] 17. Лидарная система по вар. 15 или вар. 16, в которой контроллер позволяет перемещать выходные лучи для избирательного контакта выходных лучей с сегментом отражающей поверхности.
[000193] 18. Лидарная система по любому из вар. 1-17, дополнительно содержащая приемник для приема отраженных распространяющихся лучей из поля обзора.
[000194] 19. Способ обнаружения объектов в окружающем пространстве автономного транспортного средства, выполняемый контроллером, связанным с источником излучения и со сканером лидарной системы, включающий в себя: обеспечение испускания источником излучения выходных лучей по внутреннему пути излучения лидарной системы; и обеспечение направления сканером выходных лучей в поле обзора вокруг транспортного средства, при этом сканер содержит поверхность сканирования, имеющую неплоский профиль и содержащую множество сегментов отражающей поверхности, характеризующихся положением сканирующей поверхности и углом относительно опорного элемента для отражения выходных лучей в виде распространяющегося луча с заданным углом распространения, а положение и угол по меньшей мере некоторых сегментов отражающей поверхности позволяют регулировать угол распространения распространяющегося луча для регулирования распределения точек данных в схеме сканирования по полю обзора.
[000195] 20. Способ по вар. 1, дополнительно включающий в себя обеспечение контроллером, связанным с источником излучения и со сканером, падения выходного луча на заданный сегмент отражающей поверхности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Лидарные системы и способы | 2020 |
|
RU2798364C2 |
| Лидарные системы и способы | 2020 |
|
RU2798363C2 |
| ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ С ВЫБОРОЧНЫМ СКАНИРОВАНИЕМ | 2020 |
|
RU2792951C2 |
| СКАНЕР ДЛЯ ЛИДАРНОЙ СИСТЕМЫ, ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ С ИСПОЛЬЗОВАНИЕМ СКАНЕРА | 2020 |
|
RU2781619C2 |
| Лидарная система и способ с когерентным детектированием | 2020 |
|
RU2792949C2 |
| ЛИДАРНАЯ СИСТЕМА И СПОСОБ КАЛИБРОВКИ ЛИДАРНОЙ СИСТЕМЫ | 2021 |
|
RU2829088C1 |
| МУЛЬТИСПЕКТРАЛЬНЫЕ ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ | 2020 |
|
RU2792948C2 |
| ЛИДАРНАЯ СИСТЕМА И СПОСОБ КАЛИБРОВКИ ЛИДАРНОЙ СИСТЕМЫ | 2021 |
|
RU2829904C1 |
| Способ и процессор для классификации точек на границе многоугольного участка | 2023 |
|
RU2836700C1 |
| СПОСОБ И СЕРВЕР ДЛЯ ОБНОВЛЕНИЯ ПРЕДСТАВЛЕНИЯ КАРТЫ | 2024 |
|
RU2836391C1 |
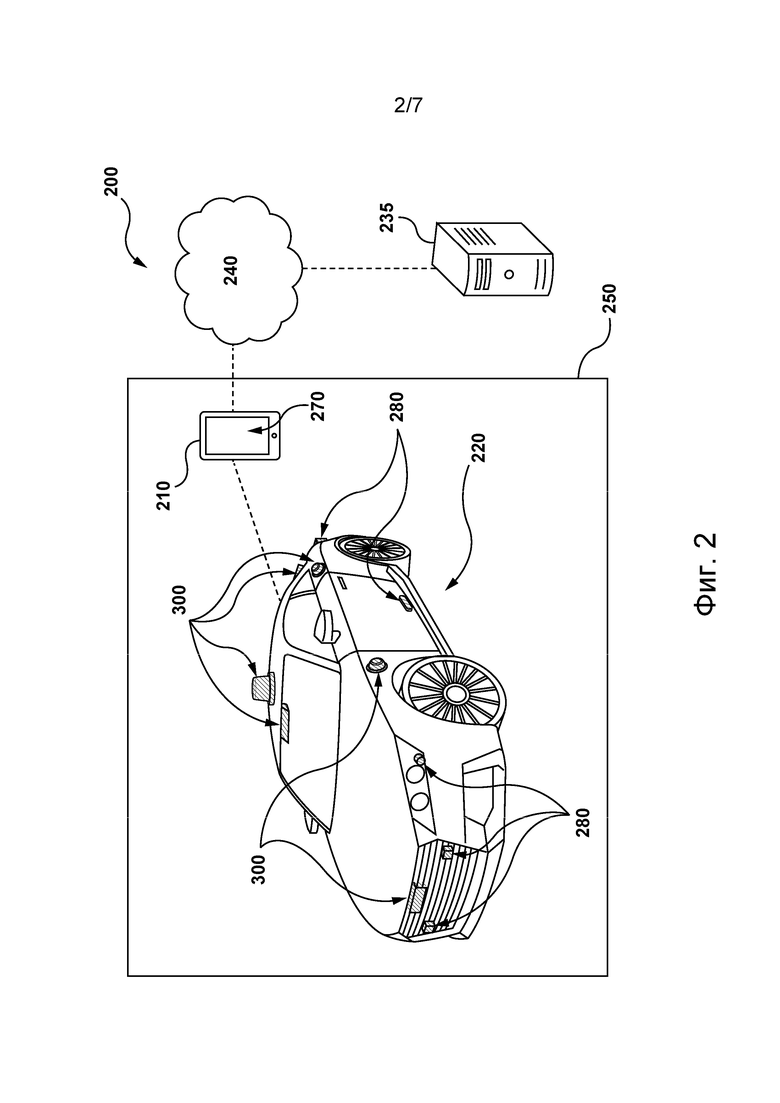
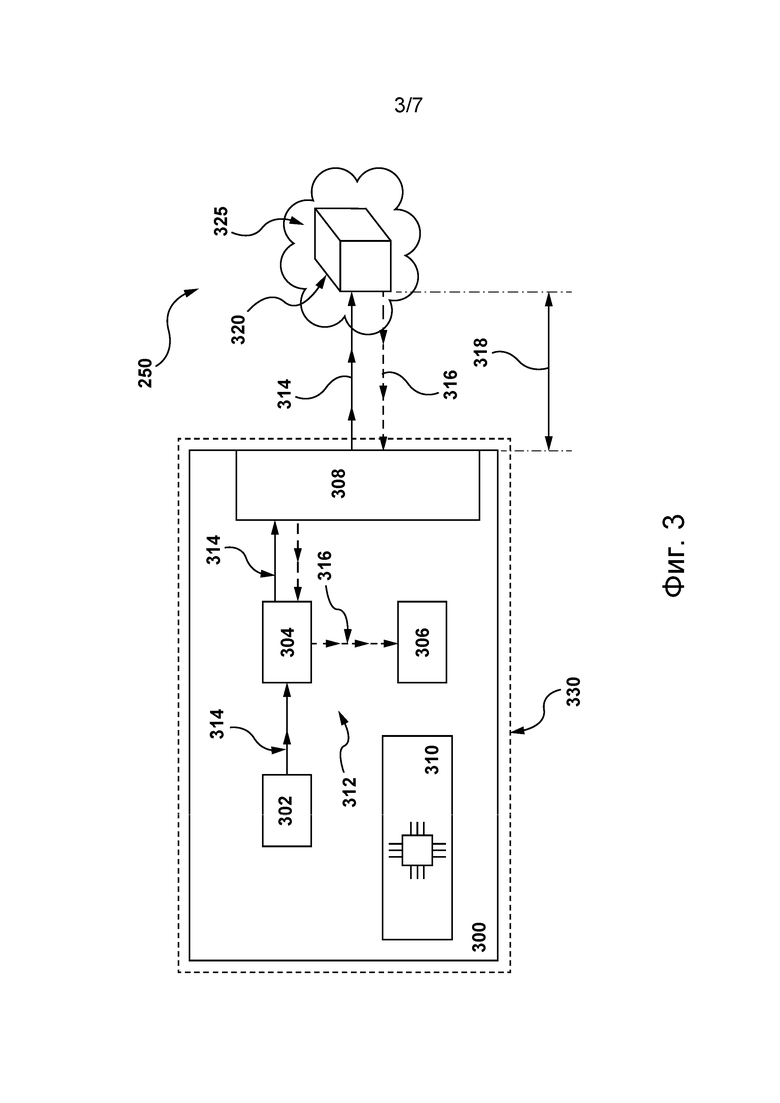
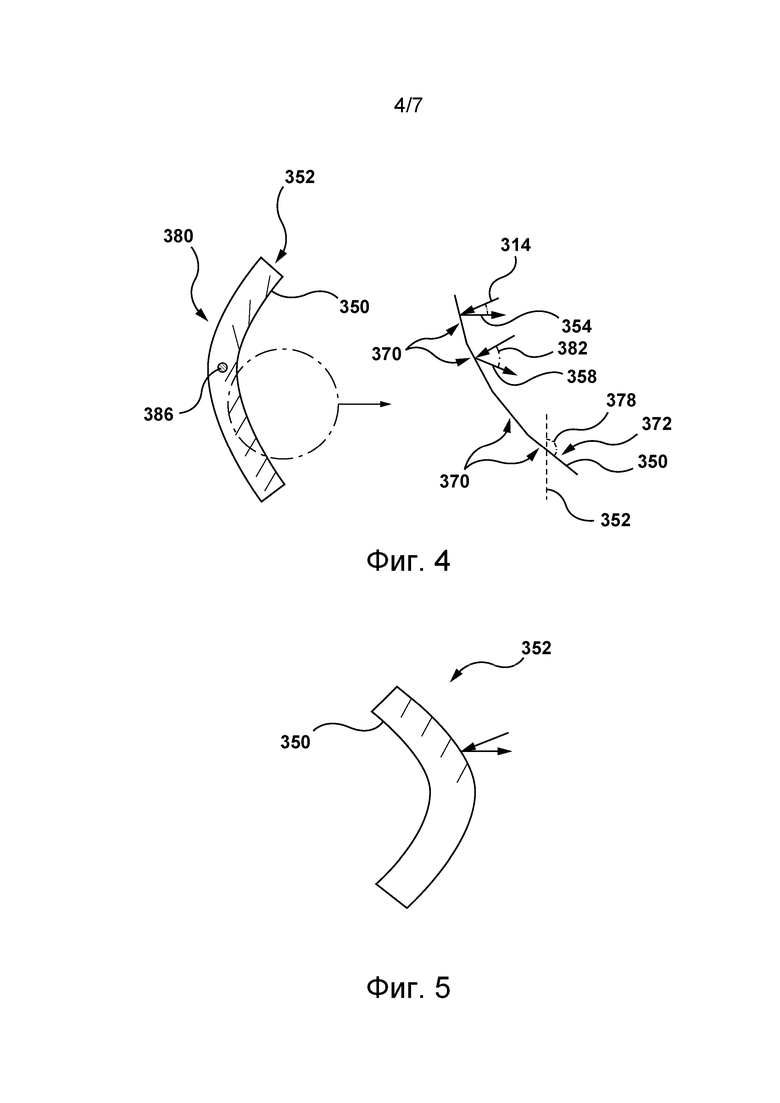
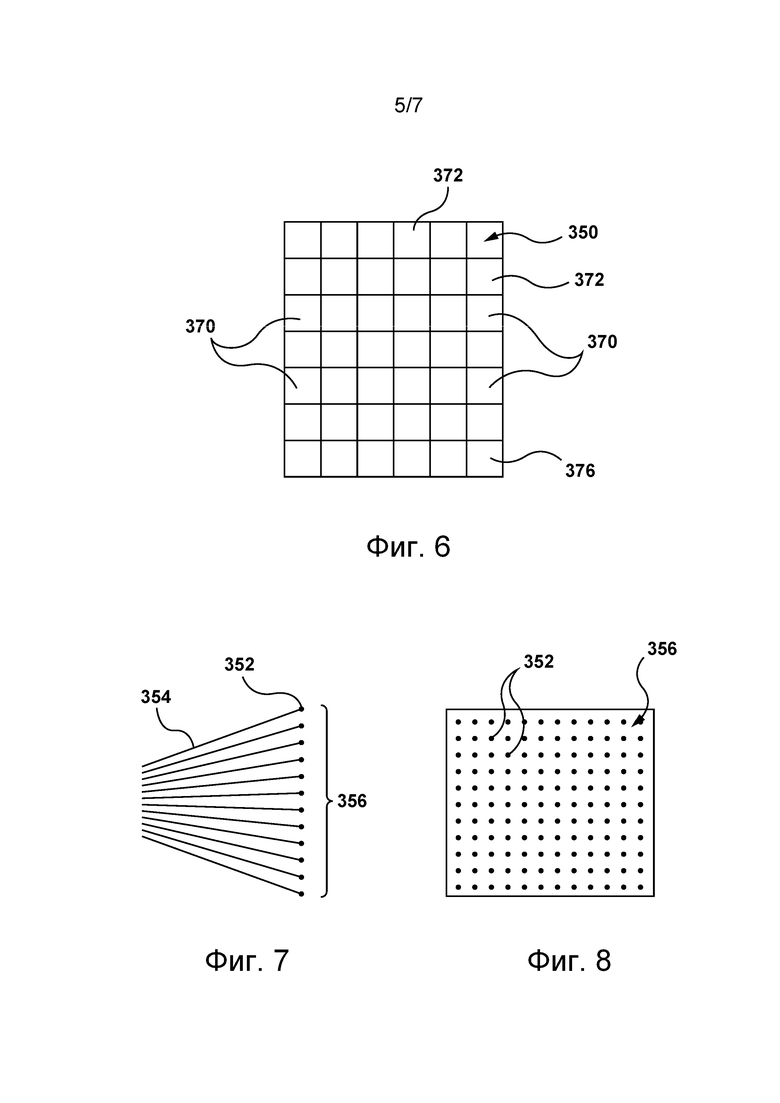
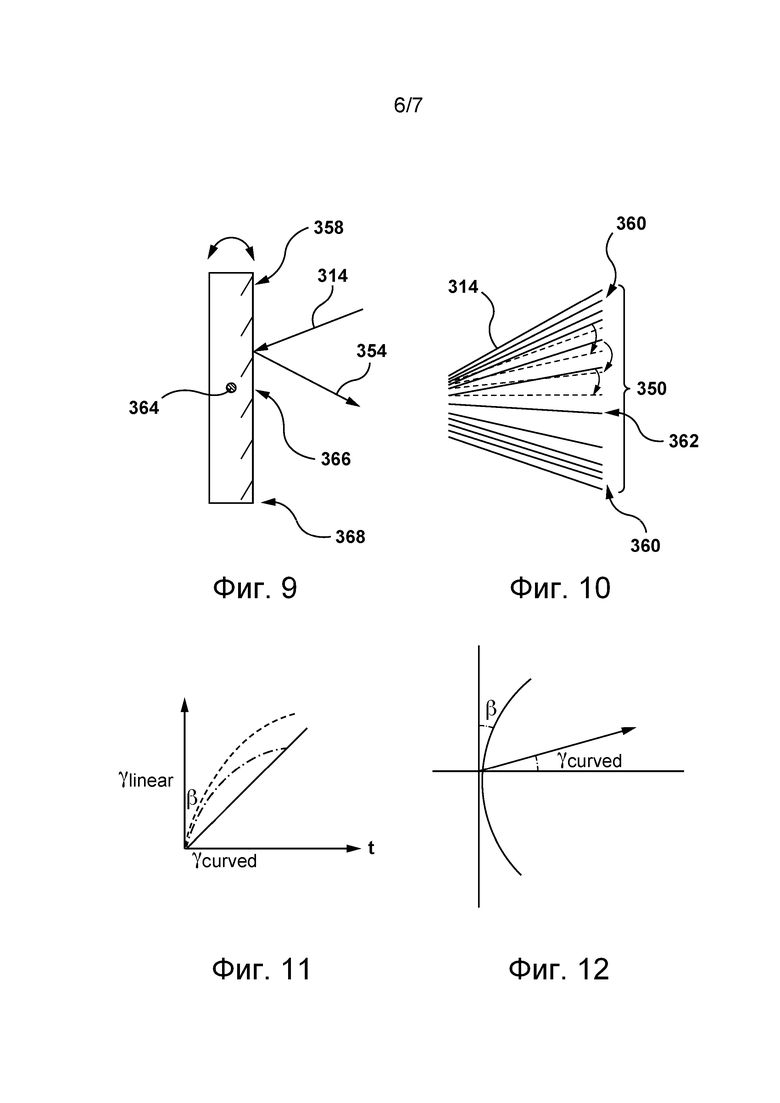
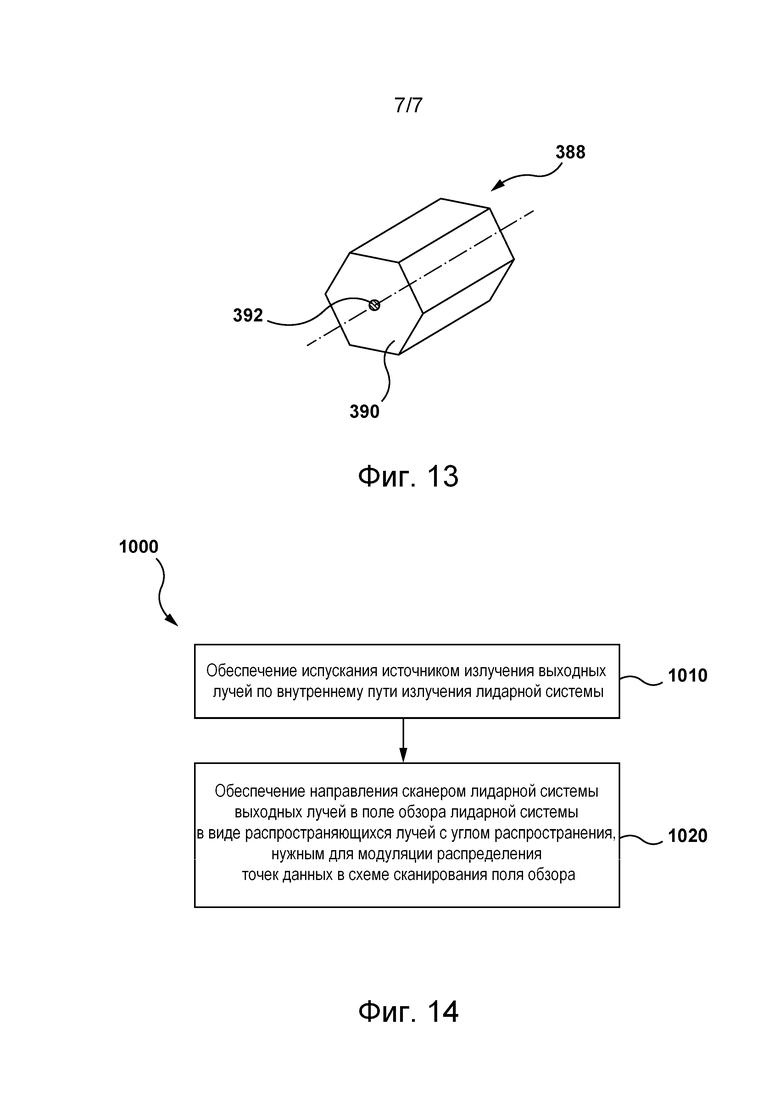
Использование: в лидарных системах транспортного средства. Сущность: лидарная система для обнаружения объектов в окружающем пространстве автономного транспортного средства содержит источник излучения, обеспечивающий испускание выходных лучей, и сканер, позволяющий направлять выходные лучи в поле обзора в окружающем пространстве транспортного средства в виде множества точек данных в схеме сканирования. Сканер содержит поверхность сканирования, имеющую неплоский профиль и содержащую множество сегментов отражающей поверхности. Каждый сегмент отражающей поверхности характеризуется положением на сканирующей поверхности и углом относительно опорного элемента для отражения выходных лучей в виде распространяющегося луча под заданным углом. При этом положение и угол по меньшей мере некоторых сегментов отражающей поверхности позволяют регулировать распределение точек данных в схеме сканирования по полю обзора. Технический результат: повышение надежности фиксирования данных об одном или нескольких объектах в окружении транспортного средства путем формирования более точной многомерной карты объектов, также обеспечивается более эффективное управление транспортным средством, в том числе с точки зрения предотвращения столкновений с объектами в окружении. 2 н. и 18 з.п. ф-лы, 14 ил.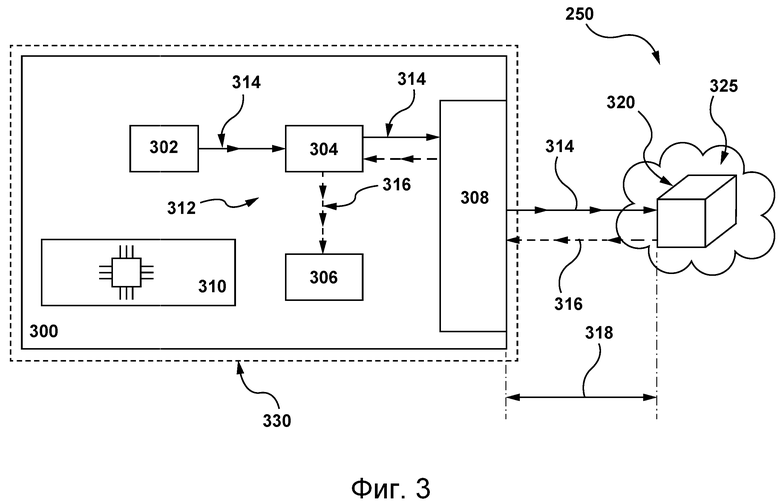
1. Лидарная система для обнаружения объектов в окружающем пространстве автономного транспортного средства, содержащая:
- источник излучения, выполненный с возможностью излучения выходных лучей по внутреннему пути излучения; и
- сканер, расположенный на внутреннем пути излучения, выполненный с возможностью направления выходных лучей в поле обзора окружающей среды в виде множества точек данных в схеме сканирования и содержащий
сканирующую поверхность, имеющую неплоский профиль и содержащую множество сегментов отражающей поверхности, причем каждый сегмент отражающей поверхности имеет
заданное положение на поверхности сканирования и заданной угол относительно опорной плоскости для отражения выходных лучей в виде распространяющегося луча с заданным углом распространения,
при этом заданное положение и заданный угол каждого сегмента отражающей поверхности выполнены с возможностью регулирования распределения точек данных в схеме сканирования в пределах поля обзора.
2. Система по п. 1, в которой заданное положение и заданный угол по меньшей мере некоторых сегментов из множества сегментов отражающей поверхности обеспечивают однородное распределение точек данных в по меньшей мере части схемы сканирования.
3. Система по п. 2, в которой заданное положение и заданный угол по меньшей мере некоторых сегментов из множества сегментов отражающей поверхности обеспечивают однородную плотность точек данных во внешней части и в центральной части схемы сканирования.
4. Система по п. 1, в которой заданное положение и заданный угол по меньшей мере некоторых сегментов из множества сегментов отражающей поверхности обеспечивают компенсацию разницы в частоте сканирования на краю сканирующей поверхности по сравнению с центром сканирующей поверхности для регулирования распределения точек данных.
5. Система по п. 1, в которой по меньшей мере один сегмент отражающей поверхности из множества сегментов отражающей поверхности является линейным.
6. Система по п. 1, в которой по меньшей мере один сегмент отражающей поверхности из множества сегментов отражающей поверхности является криволинейным.
7. Система по п. 1, в которой множество сегментов отражающей поверхности позволяет выполнить сканирующую поверхность выпуклой формы.
8. Система по п. 1, в которой множество сегментов отражающей поверхности позволяет выполнить сканирующую поверхность вогнутой формы.
9. Система по п. 1, в которой сканер представляет собой колеблющееся гальванометрическое зеркало.
10. Система по п. 1, в которой сканер представляет собой вращающуюся призму, а сканирующая поверхность представляет собой грань вращающейся призмы.
11. Система по п. 1, в которой сканер содержит вращающуюся призму и зеркало, при этом сканирующая поверхность содержит по меньшей мере одну грань вращающейся призмы и по меньшей мере одну поверхность зеркала.
12. Система по п. 1, в которой по меньшей мере два сегмента из множества сегментов отражающей поверхности расположены под углом друг к другу.
13. Система по п. 1, в которой по меньшей мере два сегмента из множества сегментов отражающей поверхности изготовлены из разных материалов для придания разных оптических свойств соответствующим распространяющимся лучам.
14. Система по п. 1, в которой множество сегментов отражающей поверхности позволяет образовывать линейную скругленную поверхность.
15. Система по п. 1, дополнительно содержащая контроллер, связанный с источником излучения и со сканером, причем контроллер выполнен с возможностью побуждения падения выходного луча на заданный сегмент отражающей поверхности.
16. Система по п. 15, в которой контроллер выполнен с возможностью перемещения сканера для избирательного контакта выходных лучей с заданным сегментом отражающей поверхности.
17. Система по п. 15, в которой контроллер выполнен с возможностью перемещения выходных лучей для избирательного контакта выходных лучей с заданным сегментом отражающей поверхности.
18. Система по п. 1, дополнительно содержащая приемник для приема отраженных распространяющихся лучей из поля обзора.
19. Способ обнаружения объектов в окружающем пространстве автономного транспортного средства, выполняемый контроллером, связанным с источником излучения и со сканером лидарной системы, включающий в себя:
- побуждение испускания источником излучения выходных лучей по внутреннему пути излучения лидарной системы; и
- побуждение направления сканером выходных лучей в поле обзора вокруг транспортного средства, при этом сканер содержит сканирующую поверхность с неплоским профилем и множеством сегментов отражающей поверхности, характеризующихся положением на поверхности сканирования и углом относительно опорной поверхности для отражения выходных лучей в виде распространяющегося луча с заданным углом распространения, а заданное положение и заданный угол по меньшей мере некоторых сегментов отражающей поверхности обеспечивают регулирование угла распространения распространяющегося луча для регулирования распределения точек данных в схеме сканирования по полю обзора.
20. Способ по п. 1, дополнительно включающий в себя обеспечение контроллером, связанным с источником излучения и со сканером, падения выходного луча на заданный сегмент отражающей поверхности.
| US 8836922 B1, 16.09.2014 | |||
| US 20190265338 A1, 29.08.2019 | |||
| DE 102012102244 B4, 12.02.2015 | |||
| US 20150301182 A1, 22.10.2015 | |||
| JP 6340851 B2, 13.06.2018. |

