Область техники
[0001] Настоящая технология в целом относится к системам обнаружения и определения дальности с помощью света (LiDAR, лидар) и к способам для обнаружения объектов в окружающей среде автономного транспортного средства; и, в частности, к системам лидара и способам для обнаружения объектов в желаемой области интереса в окружающей среде.
Уровень техники
[0002] Несколько основанных на компьютерах навигационных систем, которые выполнены с возможностью помощи в навигации и/или управлении транспортными средствами, были предложены и реализованы в предшествующем уровне техники. Эти системы варьируются от более простых решений на основе картографической локализации, т.е. использования компьютерной системы для помощи водителю в навигации по маршруту от начальной точки до конечной точки; к более сложным, таким как системы вождения с содействием посредством компьютера или автономные от водителя.
[0003] Некоторые из этих систем реализованы как так называемые системы «круиз-контроля» (системы автоматического поддержания скорости движения). В рамках этих систем компьютерная система, установленная на транспортных средствах, поддерживает заданную пользователем скорость транспортного средства. Некоторые из систем круиз-контроля реализуют систему «интеллектуального управления расстоянием», с помощью которой пользователь может установить расстояние до потенциального автомобиля впереди (например, выбрать значение, выраженное в количестве транспортных средств), а компьютерная система регулирует скорость транспортного средства, по меньшей мере частично, на основе транспортного средства, приближающегося к потенциальному транспортному средству впереди в пределах предварительно определенного расстояния. Некоторые из систем круиз-контроля дополнительно оснащены системами контроля столкновений, которые при обнаружении транспортного средства (или других препятствий) перед движущимся транспортным средством замедляют или останавливают транспортное средство.
[0004] Некоторые из более совершенных систем обеспечивают полностью автономное вождение транспортного средства без прямого управления со стороны оператора (т.е. водителя). Эти автономно управляемые транспортные средства включают в себя системы, которые могут вызывать ускорение, торможение, остановку, смену полосы движения и самостоятельную парковку.
[0005] Одной из основных технических проблем при реализации вышеупомянутых систем является способность обнаруживать объекты, расположенные вокруг транспортного средства. В одном примере системам может потребоваться способность обнаруживать транспортное средство впереди текущего транспортного средства (текущее транспортное средство, имеющее систему на борту), причем это транспортное средство впереди может представлять риск/опасность для текущего транспортного средства и может потребовать, чтобы система приняла корректирующие меры, будь то торможение или иное изменение скорости, остановка или смена полосы движения. В другом примере системам может потребоваться обнаружение пешеходного перехода или перехода для животных перед транспортным средством или иным образом в окружающей среде транспортного средства.
[0006] Обнаружение объектов на основе лидара обычно включает в себя передачу лучей света в направлении интересующей области и обнаружение отраженных световых лучей, например, от объектов в интересующей области, для формирования представления интересующей области, включая любые объекты. В качестве источника излучения (света) часто используются лазеры, излучающие световые импульсы с узкой длиной волны. Положение и расстояние до объекта можно вычислить, среди прочего, с помощью расчетов времени пролета излучаемого и обнаруженного светового луча. Вычисляя такие позиции, как «точки данных», можно сформировать цифровое многомерное представление окружающей среды.
[0007] Как правило, что касается физики обнаружения объектов на основе лидара, один подход, известный в настоящее время в данной области техники, основан на использовании импульсного излучения и относится к системам лидара Time of Flight (ToF) (времяпролетная лидарная система). В системах ToF лидара каждый датчик лидара излучает короткий импульс предварительно заданной длины волны и дополнительно регистрирует время, которое требуется для того, чтобы импульс рассеялся от окружающего объекта и вернулся к соответствующему датчику лидара. Поворачивая систему ToF лидара, расположенную в верхней части транспортного средства, содержащую множество таких датчиков лидара, на 360 градусов, можно сформировать трехмерное представление окружающей среды транспортного средства.
[0008] Трехмерное представление частично формируется отраженными лучами, принимаемыми лидаром, который генерирует точки данных, представляющие окружающие объекты. Эти точки образуют облака, которые представляют окружающую среду и образуют трехмерную карту. Каждая точка в облаке точек связана с координатами в координатном пространстве. Кроме того, каждая точка может быть связана с некоторой дополнительной информацией, такой как расстояние до объекта от беспилотного транспортного средства. Другая информация может быть связана с точками в облаке точек.
[0009] Чем больше будет получено точек приемлемого качества, тем лучше. В этом случае компьютер беспилотного транспортного средства может выполнять задачи различной когнитивной сложности с использованием облака точек, например фильтрацию, кластеризацию или выборку точек, объединение облаков точек, распознавание объекта и т.д. Качество выполнения этих отдельных задач влияет на общее качество определения местоположения и навигации беспилотного транспортного средства. Точная информация об окружающих предметах повышает безопасность вождения.
[00010] Желательно увеличить объем полученных точек в течение определенного периода времени без ущерба для других аспектов лидарной системы, таких как размер, стоимость и сложность.
Сущность изобретения
[00011] Следовательно, существует потребность в системах и способах, которые позволяют избежать, уменьшить или преодолеть ограничения предшествующего уровня техники.
[00012] Разработчики отметили, что полученные точки данных в течение определенного периода времени могут быть увеличены за счет уменьшения мертвого времени (времени простоя) между передачей различных импульсов света в интересующую область. В связи с этим был разработан сканер, который включает в себя множество зеркал для отражения света от источника света, причем зеркала выполнены с возможностью сканирования как в горизонтальном, так и в вертикальном направлениях, и который может уменьшить мертвое время между передачей различных импульсов света.
[00013] Некоторые подходы предшествующего уровня техники были предложены относительно сканеров, которые включают в себя зеркала.
[00014] Публикация патентной заявки США US8130432 описывает сканер пространства для самоконтролируемого движущегося объекта. Сканер пространства имеет структуру, в которой отражающее зеркало вращается и наклоняется. Таким образом, сканер пространства может сканировать движущийся объект в горизонтальном и вертикальном направлениях для получения пространственных данных, тем самым выполняя движение с самостоятельным управлением.
[00015] Публикация патентной заявки США US2020049819 описывает трехмерный сканер пространства, сконфигурированный так, что отражающее зеркало поворачивается и наклоняется так, чтобы сканировать мобильный объект как в горизонтальном, так и в вертикальном направлении, тем самым получая пространственные данные.
[00016] Публикация патентной заявки США US2018231640 A описывает устройство лидара, включающее в себя источник света для излучения светового луча для сканирования диапазона ориентаций, связанных с целевой зоной сканирования. Устройство лидара дополнительно включает в себя первое зеркало микроэлектромеханической системы (MEMS), выполненное с возможностью приема и перенаправления светового луча в целевую зону сканирования. Первое зеркало MEMS выполнено с возможностью наклона по вертикали и горизонтали для перенаправления светового луча под множеством углов. Устройство лидара дополнительно включает в себя детектор света для приема светового луча, отраженного от одного или нескольких объектов, расположенных в целевой зоне сканирования. Первое зеркало MEMS наклоняется в нескольких направлениях по отношению к источнику света, чтобы позволить источнику света испускать световой луч, а детектору света принимать отраженный световой луч для получения нескольких угловых разрешений одного или нескольких объектов.
[00017] В соответствии с первым широким аспектом настоящей технологии обеспечен сканер для лидарной системы автономного транспортного средства, причем сканер содержит: компонент ступицы, содержащий корпус ступицы, который выполнен с возможностью вращения вокруг оси вращения ступицы; по меньшей мере три зеркальных компонента, подвижно соединенных с компонентом ступицы, каждый зеркальный компонент имеет: переднюю сторону, имеющую отражающую поверхность для направления падающих световых лучей; и заднюю сторону, имеющую соединитель для прикрепления упомянутых по меньшей мере трех зеркальных компонентов к компоненту ступицы с соответствующими отражающими поверхностями, обращенными наружу, причем соединитель выполнен с возможностью допускать вращение зеркального компонента вместе с компонентом ступицы и допускать наклон зеркального компонента вокруг оси наклона зеркала, которая является поперечной к оси вращения ступицы.
[00018] В некоторых вариантах осуществления компонент ступицы и по меньшей мере три зеркальных компонента образуют многогранную конфигурацию, при этом по меньшей мере три зеркальных компонента образуют по меньшей мере три стороны многогранника.
[00019] В некоторых вариантах осуществления данные отражающие поверхности по меньшей мере трех зеркальных компонентов имеют конфигурацию расположения бок о бок при соединении с компонентом ступицы и расположены под углом друг к другу.
[00020] В некоторых вариантах осуществления по меньшей мере три зеркальных компонента расположены по окружности относительно компонента ступицы вокруг оси вращения ступицы.
[00021] В некоторых вариантах осуществления соответствующие оси наклона зеркала множества зеркальных компонентов расположены по окружности компонента ступицы и лежат в одной плоскости.
[00022] В некоторых вариантах осуществления соединитель каждого зеркального компонента образует часть шарнирного соединения.
[00023] В некоторых вариантах осуществления по меньшей мере три зеркальных компонента содержат 3, 4, 5, 6, 7 или 8 зеркальных компонентов.
[00024] В некоторых вариантах осуществления по меньшей мере три зеркальных компонента содержат шесть зеркальных компонентов, расположенных по окружности вокруг компонента ступицы для образования конфигурации шестиугольной призмы, имеющей шесть сторон, причем отражающие поверхности шести зеркальных компонентов образуют шесть сторон шестиугольной призмы.
[00025] В некоторых вариантах осуществления перемещение зеркального компонента вокруг оси наклона зеркала определяет диапазон углов наклона, включающий верхний угол наклона по отношению к опорной плоскости и нижний угол наклона относительно опорной плоскости, и при этом диапазон углов наклона каждого зеркального компонента могут быть одинаковыми или отличаться друг от друга.
[00026] В некоторых вариантах осуществления способ дополнительно содержит привод вертикального перемещения для изменения угла наклона или диапазона углов наклона относительно оси наклона зеркала каждого зеркала из по меньшей мере трех зеркальных компонентов, при этом привод вертикального перемещения выполнен с возможностью изменения угла наклона каждого зеркала.
[00027] В некоторых вариантах осуществления привод вертикального перемещения содержит базовый компонент, имеющий радиус, который изменяется по длине, расположенный по окружности вокруг основания компонента ступицы, причем базовый компонент выполнен с возможностью возвратно-поступательного движения параллельно оси вращения ступицы, находясь в контакте с задней стороной каждого из по меньшей мере трех зеркальных компонентов для перемещения по меньшей мере трех зеркальных компонентов вокруг их соответствующих осей наклона зеркала, когда базовый компонент совершает возвратно-поступательное движение.
[00028] В некоторых вариантах осуществления сканер дополнительно содержит ролик, предусмотренный на задней стороне каждого из по меньшей мере трех зеркальных компонентов, причем ролик выполнен с возможностью вращения вокруг оси вращения ролика и вдоль поверхности базового компонента, когда компонент ступицы вращается.
[00029] В некоторых вариантах осуществления ось вращения ролика параллельна поверхности базового компонента.
[00030] В некоторых вариантах осуществления базовый компонент имеет форму конуса и имеет диаметр на нижнем конце, который шире, чем диаметр на верхнем конце, так что перемещение базового компонента вверх вызывает увеличение угла наклона относительно опорной плоскости зеркального компонента.
[00031] В некоторых вариантах осуществления компонент ступицы связан с возможностью осуществления связи с контроллером лидарной системы, причем контроллер выполнен с возможностью управления вращением компонента ступицы.
[00032] В некоторых вариантах осуществления привод вертикального перемещения связан с возможностью осуществления связи с контроллером лидарной системы, причем контроллер выполнен с возможностью управления перемещением привода вертикального перемещения, который может вызывать наклон зеркального компонента вокруг оси наклона зеркала.
[00033] В некоторых вариантах осуществления базовый компонент связан с возможностью осуществления связи с контроллером лидарной системы, причем контроллер выполнен с возможностью управления возвратно-поступательным движением привода вертикального перемещения, который может вызывать наклон зеркального компонента вокруг оси наклона зеркала.
[00034] С другой стороны обеспечена лидарная система для обнаружения объектов в окружающей среде автономного транспортного средства, при этом лидарная система содержит: компонент ступицы, содержащий корпус ступицы, который выполнен с возможностью вращения вокруг оси вращения ступицы; по меньшей мере три зеркальных компонента, подвижно соединенных с компонентом ступицы, причем каждый зеркальный компонент имеет: переднюю сторону, имеющую отражающую поверхность для направления падающих световых лучей; и заднюю сторону, имеющую соединитель для прикрепления упомянутых по меньшей мере трех зеркальных компонентов к компоненту ступицы с соответствующими отражающими поверхностями, обращенными наружу, причем соединитель выполнен с возможностью допускать вращение зеркального компонента вместе с компонентом ступицы и допускать наклон зеркального компонента вокруг оси наклона зеркала, которая является поперечной к оси вращения ступицы.
[00035] В некоторых вариантах осуществления лидарная система дополнительно содержит контроллер, связанный с возможностью осуществления связи со сканером, причем контроллер выполнен с возможностью вызывать вращение компонента ступицы вокруг оси вращения и/или наклонное движение по меньшей мере трех зеркальных компонентов вокруг соответствующей оси наклона зеркала.
[00036] В некоторых вариантах осуществления лидарная система дополнительно содержит приемник для приема отраженных выходных лучей из интересующей области.
[00037] С другой стороны обеспечен способ формирования шаблона сканирования в интересующей области с помощью сканера лидарной системы автономного транспортного средства, причем способ выполняется контроллером лидарной системы, который связан с возможностью осуществления связи со сканером, способ включает в себя: контроллер, вызывающий вращение компонента ступицы вокруг оси вращения ступицы, к которой прикреплены по меньшей мере три зеркальных компонента, каждый зеркальный компонент имеет отражающую поверхность, обращенную наружу от компонента ступицы, для позиционирования заданного одного из по меньшей мере трех зеркальных компонентов, так что излучаемый световой луч из лидарной системы падает на заданный один зеркальный компонент для передачи горизонтального расширенного луча; контроллер, вызывающий наклон заданного одного зеркального компонента относительно компонента ступицы на заранее определенный первый угол наклона для передачи первого вертикально расширенного луча.
[00038] В некоторых вариантах осуществления способ включает в себя контроллер, вызывающий дополнительное вращение компонента ступицы вокруг оси вращения ступицы, чтобы расположить заданный другой один из по меньшей мере трех зеркальных компонентов так, чтобы другой испускаемый световой луч из лидарной системы падал на заданный другой из по меньшей мере трех зеркальных компонентов.
[00039] В некоторых вариантах осуществления способ включает в себя контроллер, вызывающий наклон заданного другого одного зеркального компонента относительно компонента ступицы на предварительно заданный второй угол наклона для передачи второго вертикального расширенного луча, причем предварительно заданный первый угол наклона и предварительно заданный второй угол наклона могут быть одинаковыми или разными.
[00040] В некоторых вариантах осуществления способ дополнительно включает в себя контроллер, координирующий испускание светового луча с вращением компонента ступицы, так что последовательные световые лучи падают на разные зеркальные компоненты.
[00041] В еще одном дополнительном аспекте обеспечен сканер для лидарной системы автономного транспортного средства, причем сканер содержит: отражающие поверхности, расположенные по окружности вокруг вращающегося компонента ступицы и вращающиеся вместе с компонентом ступицы; каждая отражающая поверхность выполнена с возможностью наклона вокруг оси наклона зеркала, которая является поперечной к оси вращения ступицы; привод вертикального перемещения, выполненный с возможностью заставлять отражающую поверхность наклоняться.
[00042] Некоторые варианты осуществления настоящей системы и способа позволяют снизить мертвое время во время работы лидара. Множество отражающих поверхностей может означать, что другая отражающая поверхность представляется проходящему световому лучу посредством перемещения ступицы, которое может быть согласовано с передачей светового луча. В некоторых вариантах осуществления множество отражающих поверхностей расположено по окружности вокруг компонента ступицы, и вращение компонента ступицы может представлять другую отражающую поверхность для светового луча. В некоторых вариантах осуществления имеется 4, 6 или 8 отражающих поверхностей.
[00043] В некоторых вариантах осуществления настоящей системы и способа быстрый переход сканирования между верхней и нижней частями поля обзора (FOV) может быть достигнута за счет наклона отражающих поверхностей. Кроме того, множество разнесенных отражающих поверхностей можно наклонять одновременно, например парами или тройками.
[00044] В некоторых вариантах осуществления настоящей системы и способа размер лидара может быть уменьшен или минимизирован по сравнению с обычными системами лидара из-за компонента ступицы и компонента отражающей поверхности. Статические зеркала не требуются.
[00045] В некоторых вариантах осуществления настоящей системы и способа нет необходимости в беспроводных электрических соединениях между компонентами, поскольку нет вращающихся/поворачивающих электронных компонентов, требующих беспроводного соединения. Следовательно, надежность способов и систем лидара может быть повышена из-за отсутствия беспроводной передачи данных.
[00046] В контексте настоящего описания термин «источник света» в широком смысле относится к любому устройству, выполненному с возможностью испускания излучения, такого как сигнал излучения в форме луча, например, без ограничения, луч света, включающий в себя излучение одной или нескольких соответствующих длин волн в электромагнитном спектре. В одно примере источником света может быть «лазерный источник». Таким образом, источник света может включать в себя лазер, такой как твердотельный лазер, лазерный диод, лазер высокой мощности, или альтернативный источник света, такой как источник света на основе светоизлучающих диодов (LED). Некоторые (не ограничивающие) примеры лазерного источника включают в себя: лазерный диод Фабри-Перо, лазер с квантовыми ямами, лазер с распределенным брэгговским отражателем (DBR), лазер с распределенной обратной связью (DFB), волоконный лазер или лазер поверхностного излучения с вертикальным резонатором (VCSEL). Кроме того, лазерный источник может испускать световые лучи в различных форматах, таких как световые импульсы, непрерывные волны (CW), квазинепрерывные волны и так далее. В некоторых неограничивающих примерах лазерный источник может включать в себя лазерный диод, выполненный с возможностью излучения света с длиной волны от примерно 650 нм до 1150 нм. В качестве альтернативы, источник света может включать в себя лазерный диод, выполненный с возможностью излучения световых лучей с длиной волны от примерно 800 нм до примерно 1000 нм, от примерно 850 нм до примерно 950 нм, от примерно 1300 нм до примерно 1600 нм или в любом другом подходящем диапазоне. Если не указано иное, термин «примерно» применительно к числовому значению определяется как отклонение до 10% от указанного значения.
[00047] В контексте настоящего описания «выходной луч» может также называться лучом излучения, таким как луч света, который формируется источником излучения и направлен далее в сторону интересующей области. Выходной луч может иметь один или более параметров, таких как: длительность луча, угловая дисперсия луча, длина волны, мгновенная мощность, плотность фотонов на разных расстояниях от источника света, средняя мощность, интенсивность мощности луча, ширина луча, частота повторения луча, последовательность лучей, рабочий цикл импульса, длина волны или фаза и т.д. Выходной луч может быть неполяризованным или произвольно поляризованным, может не иметь определенной или фиксированной поляризации (например, поляризация может меняться со временем) или может иметь конкретную поляризацию (например, линейную поляризацию, эллиптическую поляризацию или круговую поляризацию).
[00048] В контексте настоящего описания «входной луч» - это излучение или свет, попадающий в систему, обычно после отражения от одного или нескольких объектов в интересующей области. «Входной луч» также может называться лучом излучения или световым лучом. Под отражением подразумевается, что по меньшей мере часть выходного луча, падающего на один или более объектов в интересующей области, отражается от одного или нескольких объектов. Входной луч может иметь один или более параметров, таких как: время пролета (то есть время от излучения до обнаружения), мгновенная мощность (например, сигнатура мощности), средняя мощность во всем возвратном импульсе и распределение фотонов/сигнал в периоде возвратного импульса и т.д. В зависимости от конкретного использования, некоторое излучение или свет, собранный во входном луче, может быть от источников, отличных от отраженного выходного луча. Например, по меньшей мере некоторая часть входного луча может включать в себя световой шум из окружающей среды (включая расширенный солнечный свет) или других источников света, внешних по отношению к настоящей системе.
[00049] В контексте настоящего описания термин «окружение» или «среда» данного транспортного средства относится к области или объему вокруг заданного транспортного средства, включая часть его текущего окружения, доступную для сканирования с использованием одного или нескольких датчиков, установленных на заданное транспортное средство, например, для формирования трехмерной карты такого окружения или обнаружения в нем объектов.
[00050] В контексте настоящего описания «интересующая область» может в широком смысле включать в себя часть наблюдаемой среды лидарной системы, в которой один или более объектов могут быть обнаружены. Следует отметить, что на интересующую область лидарной системы могут влиять различные условия, такие как, но не ограничиваясь ими: ориентация лидарной системы (например, направление оптической оси лидарной системы); положение лидарной системы по отношению к окружающей среде (например, расстояние над землей и прилегающий рельеф местности и препятствия); рабочие параметры лидарной системы (например, мощность излучения, вычислительные настройки, заданные углы работы) и т.д. Интересующая область лидарной системы может быть определена, например, плоским углом или телесным углом. В одном примере интересующая область также может быть определена в определенном диапазоне расстояний (например, до 200 м или около того).
[00051] В контексте настоящей спецификации «сервер» - это компьютерная программа, которая работает на соответствующем аппаратном обеспечении и способна принимать запросы (например, от электронных устройств) по сети и выполнять эти запросы или вызывать выполнение этих запросов. Аппаратное обеспечение может быть реализовано как один физический компьютер или одна физическая компьютерная система, но ни то, ни другое не требуется в отношении настоящей технологии. В данном контексте использование выражения «сервер» не предназначено для обозначения того, что каждая задача (например, полученные инструкции или запросы) или любая конкретная задача будет получена, выполнена или вызвана к выполнению тем же сервером (то есть такое же программное обеспечение и/или аппаратное обеспечение); оно предназначено для обозначения, что любое количество программных элементов или аппаратных устройств может быть вовлечено в прием/отправку, выполнение или обеспечение выполнения любой задачи или запроса, или последствий любой задачи или запроса; и все это программное и аппаратное обеспечение может быть одним сервером или несколькими серверами, и оба случая включены в выражение «по меньшей мере один сервер».
[00052] В контексте настоящего описания «электронное устройство» - это любое компьютерное аппаратное обеспечение, которое способно запускать программное обеспечение, подходящее для соответствующей решаемой задачи. В контексте настоящего описания термин «электронное устройство» подразумевает, что устройство может функционировать как сервер для других электронных устройств, однако это не обязательно в отношении настоящей технологии. Таким образом, некоторые (не ограничивающие) примеры электронных устройств включают в себя самоуправляемый блок, персональные компьютеры (настольные компьютеры, ноутбуки, нетбуки и т.д.), смартфоны и планшеты, а также сетевое оборудование, такое как маршрутизаторы, коммутаторы и шлюзы. Следует понимать, что в данном контексте тот факт, что устройство функционирует как электронное устройство, не означает, что оно не может функционировать как сервер для других электронных устройств.
[00053] В контексте настоящего описания выражение «информация» включает в себя информацию любого характера или вида, которая может быть сохранена в базе данных. Таким образом, информация включает в себя, помимо прочего, визуальные произведения (например, карты), аудиовизуальные произведения (например, изображения, фильмы, звукозаписи, презентации и т.д.), данные (например, данные о местоположении, данные о погоде, данные о дорожном движении, числовые данные и т.д.), текст (например, мнения, комментарии, вопросы, сообщения и т.д.), документы, электронные таблицы и т.д.
[00054] В контексте настоящего описания «база данных» - это любой структурированный набор данных, независимо от его конкретной структуры, программного обеспечения для управления базой данных или компьютерного аппаратного обеспечения, на котором данные хранятся, реализованы или иным образом доступны для использования. База данных может находиться на том же аппаратном обеспечении, что и процесс, который хранит или использует информацию, хранящуюся в базе данных, или она может находиться на отдельном оборудовании, например на выделенном сервере или множестве серверов.
[00055] В контексте настоящего описания слова «первый», «второй», «третий» и т.д. использовались в качестве прилагательных только с целью обеспечения различия между существительными, которые они отличают друг от друга, а не с целью описания каких-либо конкретных отношений между этими существительными. Кроме того, как обсуждается здесь в других контекстах, ссылка на «первый» элемент и «второй» элемент не препятствует тому, чтобы эти два элемента были одним и тем же фактическим элементом реального мира.
[00056] Каждая из реализаций настоящей технологии обладает по меньшей мере одним из вышеупомянутых аспектов и/или цели, но не обязательно имеет их все. Следует понимать, что некоторые аспекты настоящей технологии, которые возникли в попытке достичь вышеупомянутой цели, могут не удовлетворять этой цели и/или удовлетворять другим целям, которые не описаны в данном документе явным образом.
[00057] Дополнительные и/или альтернативные признаки, аспекты и преимущества реализаций настоящей технологии станут очевидными из нижеследующего описания, сопроводительных чертежей и приложенной формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[00058] Эти и другие признаки, аспекты и преимущества настоящей технологии станут более понятными из нижеследующего описания, приложенной формулы изобретения и сопроводительных чертежей, на которых:
[00059] Фиг. 1 изображает принципиальную схему примерной компьютерной системы, конфигурируемой для реализации некоторых неограничивающих вариантов осуществления настоящей технологии;
[00060] Фиг. 2 изображает принципиальную схему сетевой вычислительной среды, подходящей для использования с некоторыми неограничивающими вариантами осуществления настоящей технологии;
[00061] Фиг. 3 изображает принципиальную схему примерной лидарной системы, реализованной в соответствии с некоторыми неограничивающими вариантами осуществления настоящей технологии;
[00062] Фиг. 4 изображает общий вид блока сканера, содержащего зеркальные компоненты, лидарной системы, показанной на фиг. 3, в соответствии с некоторыми неограничивающими вариантами осуществления настоящей технологии;
[00063] Фиг. 5 изображает вид в разрезе блока сканера, показанного на фиг. 4, по линии 5'-5' в соответствии с некоторыми неограничивающими вариантами осуществления настоящей технологии;
[00064] Фиг. 6 изображает вид сбоку одного из зеркальных компонентов блока сканера по фиг. 4 в соответствии с некоторыми неограничивающими вариантами осуществления настоящей технологии;
[00065] Фиг. 7 изображает вид сверху блока сканера по фиг. 4 в соответствии с некоторыми неограничивающими вариантами осуществления настоящей технологии;
[00066] Фиг. 8 изображает вид сверху другого варианта осуществления блока сканера по фиг. 4 в соответствии с некоторыми другими неограничивающими вариантами осуществления настоящей технологии;
[00067] Фиг. 9 изображает вид сверху другого варианта осуществления блока сканера по фиг. 4 в соответствии с некоторыми другими неограничивающими вариантами осуществления настоящей технологии;
[00068] Фиг. 10 изображает вид сверху другого варианта осуществления блока сканера по фиг. 4 в соответствии с некоторыми другими неограничивающими вариантами осуществления настоящей технологии;
[00069] Фиг. 11 изображает вид сбоку в первом положении зеркального компонента и базового компонента блока сканера по фиг. 4 в соответствии с некоторыми неограничивающими вариантами осуществления настоящей технологии;
[00070] Фиг. 12 изображает вид сбоку во втором положении зеркального компонента и базового компонента по фиг. 11 в соответствии с некоторыми неограничивающими вариантами осуществления настоящей технологии;
[00071] Фиг. 13 изображает вид сбоку в третьем положении зеркального компонента и базового компонента по фиг. 11 в соответствии с некоторыми неограничивающими вариантами осуществления настоящей технологии;
[00072] Фиг. 14 изображает блок-схему способа обнаружения объектов в интересующей области в соответствии с различными неограничивающими вариантами осуществления настоящей технологии;
[00073] Фиг. 15 изображает слева вид сверху варианта осуществления блока сканера по фиг. 4 в первом положении, а справа - вид сбоку одного из зеркальных компонентов блока сканирования в соответствии с различными неограничивающими вариантами осуществления настоящей технологии; и
[00074] Фиг. 16 изображает слева вид сверху варианта осуществления блока сканера по фиг. 4 во втором положении, а справа - вид сбоку еще одного из зеркальных компонентов блока сканирования, в соответствии с различными неограничивающими вариантами осуществления настоящей технологии.
Подробное описание
[00075] Приведенные в данном документе примеры и условные формулировки призваны главным образом помочь читателю понять принципы настоящей технологии, а не ограничить ее объем такими конкретно приведенными примерами и условиями. Должно быть понятно, что специалисты в данной области смогут разработать различные механизмы, которые, хоть и не описаны в данном документе явным образом, тем не менее воплощают принципы настоящей технологии и включаются в ее суть и объем.
[00076] Кроме того, нижеследующее описание может описывать реализации настоящей технологии в относительно упрощенном виде для целей упрощения понимания. Специалисты в данной области поймут, что различные реализации настоящей технологии могут иметь большую сложность.
[00077] В некоторых случаях также могут быть изложены примеры модификаций настоящей технологии, которые считаются полезными. Это делается лишь для содействия пониманию и, опять же, не для строгого определения объема или очерчивания границ настоящей технологии. Эти модификации не являются исчерпывающим списком, и специалист в данной области может осуществлять другие модификации, все еще оставаясь при этом в рамках объема настоящей технологии. Кроме того, случаи, когда примеры модификаций не приводятся, не следует толковать так, что никакие модификации не могут быть осуществлены и/или что описанное является единственным способом реализации такого элемента настоящей технологии.
[00078] Более того, все утверждения в данном документе, излагающие принципы, аспекты и реализации технологии, а также их конкретные примеры, предназначены для охвата как их структурных, так и функциональных эквивалентов, независимо от того, известны они в настоящее время или разрабатываются в будущем. Таким образом, например, специалисты в данной области осознают, что любые блок-схемы в данном документе представляют концептуальные виды иллюстративной схемы, воплощающей принципы настоящей технологии. Аналогичным образом, будет понятно, что любые блок-схемы, схемы последовательности операций, схемы изменения состояний, псевдо-коды и подобное представляют различные процессы, которые могут быть по сути представлены на считываемых компьютерам носителях и исполнены компьютером или процессором вне зависимости от того, показан такой компьютер или процессор явным образом или нет.
[00079] Функции различных элементов, показанных на фиг., включая любой функциональный блок, обозначенный как «процессор», могут быть обеспечены за счет использования специализированного аппаратного обеспечения, а также аппаратного обеспечения, способного выполнять программное обеспечение в сочетании с соответствующим программным обеспечением. При обеспечении процессором функции могут быть обеспечены одним выделенным процессором, одним совместно используемым процессором или множеством отдельных процессоров, некоторые из которых могут быть совместно используемыми. Кроме того, явное использование термина "процессор" или "контроллер" не должно истолковываться как относящееся исключительно к аппаратному обеспечению, способному исполнять программное обеспечение, и может в неявной форме включать в себя, без ограничений, аппаратное обеспечение цифрового сигнального процессора (DSP), сетевой процессор, интегральную схему специального назначения (ASIC), программируемую пользователем вентильную матрицу (FPGA), постоянную память (ROM) для хранения программного обеспечения, оперативную память (RAM) и энергонезависимое хранилище. Другое аппаратное обеспечение, традиционное и/или специализированное, также может быть включено в состав.
[00080] Программные модули, или просто модули, в качестве которых может подразумеваться программное обеспечение, могут быть представлены в настоящем документе как любая комбинация элементов блок-схемы последовательности операций или других элементов, указывающих выполнение этапов процесса и/или текстовое описание. Такие модули могут выполняться аппаратным обеспечением, которое явно или неявно показано.
[00081] Учитывая эти основополагающие вещи, рассмотрим некоторые неограничивающие примеры, чтобы проиллюстрировать различные реализации аспектов настоящей технологии.
Компьютерная система
[00082] Ссылаясь первоначально на фиг. 1, на ней изображена принципиальная схема компьютерной системы 100, подходящей для использования с некоторыми реализациями настоящей технологии. Компьютерная система 100 содержит различные аппаратные компоненты, включая в себя один или более одноядерных или многоядерных процессоров, совместно представленных процессором 110, твердотельный накопитель 120 и память 130, которая может быть оперативной памятью или любым другим типом памяти.
[00083] Связь между различными компонентами компьютерной системы 100 может быть обеспечена одной или несколькими внутренними и/или внешними шинами (не показаны) (например, шиной PCI, универсальной последовательной шиной, шиной Firewire IEEE 1394, шиной SCSI, шиной Serial-ATA и т.д.), с которыми различные компоненты аппаратного обеспечения связаны электронным образом. Согласно вариантам осуществления настоящей технологии твердотельный накопитель 120 хранит программные инструкции, подходящие для загрузки в память 130 и выполнения процессором 110 для определения присутствия объекта. Например, программные инструкции могут быть частью приложения управления транспортным средством, выполняемого процессором 110. Следует отметить, что компьютерная система 100 может иметь дополнительные и/или опциональные компоненты (не показаны), такие как модули сетевой связи, модули определения местоположения и т.п.
Сетевая вычислительная среда
[00084] Со ссылкой на фиг. 2 изображена сетевая вычислительная среда 200, подходящая для использования с некоторыми неограничивающими вариантами осуществления настоящей технологии. Сетевая вычислительная среда 200 включает в себя электронное устройство 210, связанное с транспортным средством 220 и/или связанное с пользователем (не показан), который связан с транспортным средством 220 (например, с оператором транспортного средства 220). Сетевая вычислительная среда 200 также включает в себя сервер 235 на связи с электронным устройством 210 через сеть 240 связи (например, Интернет и т.п., как будет описано более подробно в данном документе ниже).
[00085] В некоторых неограничивающих вариантах осуществления настоящей технологии сетевая вычислительная среда 200 может включать в себя спутник GPS (не показан), передающий и/или принимающий сигнал GPS на/от электронного устройства 210. Следует понимать, что настоящая технология не ограничивается GPS и может использовать технологию определения местоположения, отличную от GPS. Следует отметить, что спутник GPS можно вообще не использовать.
[00086] Транспортное средство 220, с которым связано электронное устройство 210, может быть любым транспортным средством для отдыха или иного, например, частным или коммерческим автомобилем, грузовиком, мотоциклом и т.п. Хотя транспортное средство 220 изображено как наземное транспортное средство, это может быть не так во всех без исключения неограничивающих вариантах осуществления настоящей технологии. Например, в некоторых неограничивающих вариантах осуществления настоящей технологии транспортное средство 220 может быть водным транспортным средством, таким как лодка, или летательным аппаратом, например летающим дроном.
[00087] Транспортное средство 220 может управляться пользователем или транспортным средством без водителя. В некоторых неограничивающих вариантах осуществления настоящей технологии предполагается, что транспортное средство 220 может быть реализовано как самоуправляемый автомобиль (SDC). Следует отметить, что конкретные параметры транспортного средства 220 не являются ограничивающими, эти конкретные параметры включают, например: производителя транспортного средства, модель транспортного средства, год выпуска транспортного средства, вес транспортного средства, размеры транспортного средства, распределение веса транспортного средства, площадь поверхности транспортного средства, высоту транспортного средства, тип трансмиссии (например, 2x или 4x), тип шин, тормозную систему, топливную систему, пробег, идентификационный номер транспортного средства и объем двигателя.
[00088] Согласно настоящей технологии, реализация электронного устройства 210 особо не ограничивается. Например, электронное устройство 210 может быть реализовано как блок управления двигателем транспортного средства, центральный процессор транспортного средства, навигационное устройство транспортного средства (например, TomTom™, Garmin™), планшет, персональный компьютер, встроенный в транспортное средство 220, и т.п. Таким образом, следует отметить, что электронное устройство 210 может быть или может не быть постоянно связано с транспортным средством 220. Дополнительно или альтернативно электронное устройство 210 может быть реализовано в устройстве беспроводной связи, таком как мобильный телефон (например, смартфон или радиотелефон). В определенных вариантах осуществления электронное устройство 210 имеет дисплей 270.
[00089] Электронное устройство 210 может включать в себя некоторые или все компоненты компьютерной системы 100, изображенной на фиг. 1, в зависимости от конкретного варианта осуществления. В некоторых вариантах осуществления электронное устройство 210 представляет собой бортовое компьютерное устройство и включает в себя процессор 110, твердотельный накопитель 120 и память 130. Другими словами, электронное устройство 210 включает в себя аппаратное обеспечение, и/или программное обеспечение, и/или микропрограммное обеспечение, или их комбинацию для обработки данных, как будет более подробно описано ниже.
[00090] В некоторых неограничивающих вариантах осуществления настоящей технологии сеть 240 связи представляет собой Интернет. В альтернативных неограничивающих вариантах осуществления настоящей технологии сеть 240 связи может быть реализована как любая подходящая локальная сеть (LAN), глобальная сеть (WAN), частная сеть связи и т.п. Следует четко понимать, что реализации для сети 240 связи предназначены только для целей иллюстрации. Между электронным устройством 210 и сетью 240 связи обеспечен канал связи (отдельно не пронумерованный), реализация которого будет зависеть, среди прочего, от того, как реализовано электронное устройство 210. Просто в качестве примера, а не ограничения, в тех неограничивающих вариантах осуществления настоящей технологии, где электронное устройство 210 реализовано как устройство беспроводной связи, такое как смартфон или навигационное устройство, канал связи может быть реализован как канал беспроводной связи. Примеры каналов беспроводной связи могут включать в себя, без ограничения, канал сети связи 3G, канал сети связи 4G и т.п. Сеть 240 связи также может использовать беспроводное соединение с сервером 235.
[00091] В некоторых вариантах осуществления настоящей технологии сервер 235 реализован как компьютерный сервер и может включать в себя некоторые или все компоненты компьютерной системы 100 на фиг. 1. В одном неограничивающем примере сервер 235 реализован как сервер Dell™ PowerEdge™ Server под управлением операционной системы Microsoft™ Windows Server™, но также может быть реализован в любом другом подходящем оборудовании, программном обеспечении и/или микропрограммном обеспечении или их комбинации. В проиллюстрированном неограничивающем варианте осуществления настоящей технологии сервер 235 является единственным сервером. В альтернативных неограничивающих вариантах осуществления настоящей технологии функциональные возможности сервера 235 могут быть распределены и могут быть реализованы посредством нескольких серверов (не показаны).
[00092] В некоторых неограничивающих вариантах осуществления настоящей технологии процессор 110 электронного устройства 210 может поддерживать связь с сервером 235 для приема одного или нескольких обновлений. Такие обновления могут включать, помимо прочего, обновления программного обеспечения, обновления карт, обновления маршрутов, обновления погоды и т.п. В некоторых неограничивающих вариантах осуществления настоящей технологии процессор 110 также может быть выполнен с возможностью передачи на сервер 235 определенных рабочих данных, таких как пройденные маршруты, данные трафика, данные производительности и т.п. Некоторые или все такие данные, передаваемые между транспортным средством 220 и сервером 235, могут быть зашифрованы и/или анонимизированы.
[00093] Следует отметить, что электронное устройство 210 может использовать различные датчики и системы для сбора информации об окружении 250 транспортного средства 220. Как видно на фиг. 2, транспортное средство 220 может быть оборудовано множеством систем 280 датчиков. Следует отметить, что различные системы датчиков из множества систем 280 датчиков могут использоваться для сбора различных типов данных, касающихся окружения 250 транспортного средства 220.
[00094] В одном примере множество систем 280 датчиков может включать в себя различные оптические системы, включая, среди прочего, одну или более систем датчиков типа камеры, которые установлены на транспортном средстве 220 и связаны с возможностью осуществления связи с процессором 110 электронного устройства 210. Вообще говоря, одна или более систем датчиков типа камеры могут быть выполнены с возможностью сбора данных изображения о различных частях окружения 250 транспортного средства 220. В некоторых случаях данные изображения, обеспеченные одной или несколькими системами датчиков типа камеры, могут использоваться электронным устройством 210 для выполнения процедур обнаружения объекта. Например, электронное устройство 210 может быть выполнено с возможностью подачи данных изображения, обеспеченных одной или несколькими системами датчиков типа камеры, в нейронную сеть обнаружения объектов (ODNN), которая обучена локализовать и классифицировать потенциальные объекты в окружении 250 транспортного средства 220.
[00095] В другом примере множество систем 280 датчиков может включать в себя одну или более систем датчиков радарного типа, которые установлены на транспортном средстве 220 и связаны с возможностью осуществления связи с процессором 110. Вообще говоря, одна или более систем датчиков радарного типа могут быть выполнены с возможностью использования радиоволн для сбора данных о различных частях окружения 250 транспортного средства 220. Например, одна или более систем датчиков радарного типа могут быть выполнены с возможностью сбора радиолокационных данных о потенциальных объектах в окружении 250 транспортного средства 220, такие данные потенциально представляют расстояние до объектов от системы датчиков радарного типа, ориентацию объектов, быстроту и/или скорость объектов и т.п.
[00096] Следует отметить, что множество систем 280 датчиков может включать в себя дополнительные типы систем датчиков к тем, которые не исчерпывающе описаны выше, и без выхода за рамки настоящей технологии.
Лидарная система
[00097] В соответствии с настоящей технологией и, как показано на фиг. 2, транспортное средство 220 оснащено по меньшей мере одной системой обнаружения и определения дальности с помощью света (LiDAR), такой как лидарная система 300, для сбора информации об окружении 250 транспортного средства 220. Хотя здесь описано только в контексте присоединения к транспортному средству 220, также предполагается, что лидарная система 300 может работать автономно или подключаться к другой системе.
[00098] В зависимости от варианта осуществления транспортное средство 220 может включать в себя больше или меньше лидарных систем 300, чем показано. В зависимости от конкретного варианта осуществления выбор включения конкретных из множества систем 280 датчиков может зависеть от конкретного варианта осуществления лидарной системы 300. Лидарная система 300 может быть установлена или модифицирована на транспортном средстве 220 в различных местах и/или в различных конфигурациях.
[00099] Например, в зависимости от реализации транспортного средства 220 и лидарной системы 300, лидарная система 300 может быть установлена на внутренней, верхней части лобового стекла транспортного средства 220. Тем не менее, как показано на фиг. 2, другие места для установки лидарной системы 300 входят в объем настоящего раскрытия, в том числе на заднем окне, боковых окнах, переднем капоте, крыше, передней решетке, переднем бампере или сбоку транспортного средства. 220. В некоторых случаях лидарная система 300 может даже быть установлена в специальном корпусе, установленном на верхней части транспортного средства 220.
[000100] В некоторых неограничивающих вариантах осуществления, таких как вариант на фиг. 2, данная одна из множества лидарных систем 300 установлена на крыше транспортного средства 220 во вращающейся конфигурации. Например, лидарная система 300, установленная на транспортном средстве 220 с возможностью поворота, может включать в себя по меньшей мере некоторые компоненты, которые могут вращаться на 360 градусов вокруг оси вращения данной лидарной системы 300. При установке в поворотных конфигурациях данная лидарная система 300 может собирать данные о большинстве частей окружения 250 транспортного средства 220.
[000101] В некоторых неограничивающих вариантах осуществления настоящей технологии, например, показанной на фиг. 2, лидарной системы 300 устанавливаются сбоку или на передней решетке, например, в стационарной конфигурации. Например, лидарная система 300, установленная на транспортном средстве 220 в стационарной конфигурации, может включать в себя по меньшей мере некоторые компоненты, которые не могут поворачиваться на 360 градусов и выполнены с возможностью сбора данных о заранее определенных частях окружения 250 транспортного средства 220.
[000102] Независимо от конкретного местоположения и/или конкретной конфигурации лидарной системы 300, она выполнена с возможностью сбора данных об окружении 250 транспортного средства 220, используемый, например, для построения многомерной карты объектов в окружении 250 транспортного средства 220. Теперь будут описаны подробности, относящиеся к конфигурации лидарных систем 300 для сбора данных об окружении 250 транспортного средства 220.
[000103] Следует отметить, что хотя в приведенном здесь описании лидарная система 300 реализована как лидарная система Time of Flight - и, как таковая, включает в себя соответствующие компоненты, подходящие для такой реализации, - другие реализации лидарной системы 300 также возможны без отклонения от объема настоящей технологии. Например, в некоторых неограничивающих вариантах осуществления настоящей технологии лидарная система 300 также может быть реализована как лидарная система непрерывной волны с частотной модуляцией (FMCW) согласно одному или нескольким вариантам осуществления и на основе их соответствующих компонентов, как раскрыто в совместной заявке на патент России 2020117983, поданной 1 июня 2020 г. и озаглавленной «LiDAR DETECTION METHODS AND SYSTEMS»; содержание которой полностью включено в настоящее описание посредством ссылки.
[000104] Со ссылкой на фиг. 3 изображена принципиальная схема одного конкретного варианта осуществления лидарной системы 300, реализованной в соответствии с некоторыми неограничивающими вариантами осуществления настоящей технологии.
[000105] Вообще говоря, лидарная система 300 включает в себя множество внутренних компонентов, включая, но не ограничиваясь: (i) источник 302 света (также называемый «лазерный источник» или «источник излучения»), (ii) элемент 304 светоделения, (iii) блок 308 сканера (также называемый «сканером» и «узлом сканера»), (iv) приемный блок 306 (также называемый здесь «системой обнаружения», «приемным узлом» или «детектором») и (v) контроллер 310. Предполагается, что в дополнение к компонентам, не исчерпывающим образом перечисленным выше, лидарная система 300 может включать в себя множество датчиков (таких как, например, датчик температуры, датчик влажности и т.д.), которые не показаны на фиг. 3 ради ясности.
[000106] В некоторых неограничивающих вариантах осуществления настоящей технологии один или более внутренних компонентов лидарной системы 300 расположены в общем корпусе 330, как показано на фиг.3. В некоторых вариантах осуществления настоящей технологии контроллер 310 может быть расположен вне общего корпуса 330 и соединен с возможностью осуществления связи с находящимися в нем компонентами.
[000107] Вообще говоря, лидарная система 300 работает следующим образом: источник 302 света лидарной системы 300 испускает световые импульсы, формируя выходной луч 314; блок 308 сканера сканирует выходной луч 314 через окружение 250 транспортного средства 220 для обнаружения/захвата данных априори неизвестных объектов (таких как объект 320) в нем, например, для формирования многомерной карты окружения 250 где объекты (включая объект 320) представлены в виде одной или нескольких точек данных. Источник 302 света и блок 308 сканера будут описаны более подробно ниже.
[000108] В качестве некоторых неограничивающих примеров объект 320 может включать в себя все или часть из следующего человек, транспортное средство, мотоцикл, грузовик, поезд, велосипед, инвалидная коляска, прогулочная коляска, пешеход, животное, дорожный знак, светофор, разметка полосы движения, разметка дорожного покрытия, место для парковки, пилон, ограждение, дорожный барьер, выбоина, железнодорожный переезд, препятствие на дороге или рядом с ней, бордюр, остановившееся транспортное средство на дороге или рядом с ней, столб, дом, здание, мусорный бак, почтовый ящик, дерево, любой другой подходящий объект или любая подходящая комбинация всех или части из двух или более объектов.
[000109] Далее, допустим, что объект 320 находится на расстоянии 318 от лидарной системы 300. Как только выходной луч 314 достигает объекта 320, объект 320 обычно отражает по меньшей мере часть света от выходного луча 314, и некоторые из отраженных световых лучей могут возвращаться обратно в лидарную систему 300, чтобы быть принятыми в виде входного луча 316. Под отражением подразумевается, что по меньшей мере часть светового луча из выходного луча 314 отражается от объекта 320. Часть светового луча из выходного луча 314 может поглощаться или рассеиваться объектом 320.
[000110] Соответственно, входной луч 316 улавливается и обнаруживается лидарной системой 300 через приемный блок 306. В ответ приемный блок 306 затем конфигурируется для формирования одного или нескольких репрезентативных сигналов данных. Например, приемный блок 306 может формировать выходной электрический сигнал (не показан), который представляет входной луч 316. Приемный блок 306 также может подавать сформированный таким образом электрический сигнал в контроллер 310 для дальнейшей обработки. Наконец, путем измерения времени между испусканием выходного луча 314 и приемом входного луча 316 контроллер 310 вычисляет расстояние 318 до объекта 320.
[000111] Как будет описано более подробно ниже, элемент 304 светоделения используется для направления выходного луча 314 от источника 302 света к блоку 308 сканера и для направления входного луча 316 от блока сканера к приемному блоку 306.
[000112] Использование и реализации этих компонентов лидарной системы 300 в соответствии с некоторыми неограничивающими вариантами осуществления настоящей технологии будут описаны непосредственно ниже.
Источник света
[000113] Источник 302 света связан с возможностью осуществления связи с контроллером 310 и выполнен с возможностью испускания света с заданной рабочей длиной волны. С этой целью в некоторых неограничивающих вариантах осуществления настоящей технологии источник 302 света может включать в себя по меньшей мере один лазер, предварительно выполненный с возможностью работы на данной рабочей длине волны. Заданная рабочая длина волны источника 302 света может находиться в инфракрасной, видимой и/или ультрафиолетовой частях электромагнитного спектра. Например, источник 302 света может включать в себя по меньшей мере один лазер с рабочей длиной волны от примерно 650 нм до 1150 нм. В качестве альтернативы источник 302 света может включать в себя лазерный диод, выполненный с возможностью излучения света с длиной волны от примерно 800 нм до примерно 1000 нм, от примерно 850 нм до примерно 950 нм или от примерно 1300 нм до примерно 1600 нм. В некоторых других вариантах осуществления источник 302 света может включать в себя светоизлучающий диод (LED).
[000114] Источник 302 света лидарной системы 300 обычно представляет собой безопасный для глаз лазер, или, другими словами, лидарная система 300 может быть классифицирована как безопасная для глаз лазерная система или лазерное изделие. Вообще говоря, безопасный для глаз лазер, лазерная система или лазерное изделие может быть системой с некоторыми или всеми из: длины волны излучения, средней мощности, пиковой мощности, пиковой интенсивности, энергии импульса, размера луча, расходимости луча, времени экспозиции, или сканированного выходного луча такого, что излучаемый этой системой свет, имеет малую возможность или не имеет возможности нанести вред глазам человека.
[000115] Согласно некоторым неограничивающим вариантам осуществления настоящей технологии рабочая длина волны источника 302 света может находиться в пределах частей электромагнитного спектра, которые соответствуют свету, излучаемому Солнцем. Следовательно, в некоторых случаях солнечный свет может действовать как фоновый шум, который может заглушать световой сигнал, обнаруживаемый лидарной системой 300. Этот солнечный фоновый шум может приводить к ложноположительным обнаружениям и/или может иным образом искажать измерения лидарной системы 300. Хотя в некоторых случаях может оказаться целесообразным увеличить отношение сигнал/шум (SNR) лидарной системы 300 путем увеличения уровня мощности выходного луча 314, это может быть нежелательно по меньшей мере в некоторых ситуациях. Например, в некоторых реализациях может быть нежелательно увеличивать уровни мощности выходного луча 314 до уровней, превышающих безопасные для глаз пороги.
[000116] Источник 302 света включает в себя импульсный лазер, выполненный с возможностью создания, испускания или излучения импульсов света с определенной длительностью импульса. Например, в некоторых неограничивающих вариантах осуществления настоящей технологии источник 302 света может быть выполнен с возможностью излучения импульсов с длительностью импульса (например, шириной импульса) в диапазоне от 10 пс до 100 нс. В других неограничивающих вариантах осуществления настоящей технологии источник 302 света может быть выполнен с возможностью излучения импульсов с частотой повторения импульсов приблизительно от 100 кГц до 5 МГц или периодом импульса (например, временем между последовательными импульсами) приблизительно 200 нс до 10 мкс. Однако в целом источник 302 света может генерировать выходной луч 314 с любой подходящей средней оптической мощностью, а выходной луч 314 может включать в себя оптические импульсы с любой подходящей энергией импульса или пиковой оптической мощностью для данного приложения.
[000117] В некоторых неограничивающих вариантах осуществления настоящей технологии источник 302 света может включать в себя один или более лазерных диодов, включая, но не ограничиваясь: лазерный диод Фабри-Перо, лазер с квантовыми ямами, лазер с распределенным брэгговским отражателем (DBR), лазер с распределенной обратной связью (DFB) или лазер с поверхностным излучением с вертикальным резонатором (VCSEL). Так же, как примеры, данный лазерный диод, работающий в источнике 302 света, может быть лазерным диодом на основе арсенида алюминия-галлия (AlGaAs), лазерным диодом на основе арсенида индия-галлия (InGaAs) или лазерным диодом на основе арсенид-фосфида индия-галлия (InGaAsP) или любым другим подходящим лазерным диодом. Также предполагается, что источник 302 света может включать в себя один или более лазерных диодов, которые модулируются по току для создания оптических импульсов.
[000118] В некоторых неограничивающих вариантах осуществления настоящей технологии источник 302 света обычно выполнен с возможностью излучения выходного луча 314, который является коллимированным оптическим лучом, но предполагается, что полученный луч может иметь любую подходящую расходимость луча для данного применения. Вообще говоря, расходимость выходного луча 314 является угловой мерой увеличения размера поперечного сечения луча (например, радиуса луча или диаметра луча) по мере того, как выходной луч 314 перемещается от источника 302 света или лидарной системы 300. В некоторых неограничивающих вариантах осуществления настоящей технологии выходной луч 314 может иметь, по существу, круглое поперечное сечение.
[000119] Также предполагается, что выходной луч 314, излучаемый источником 302 света, может быть неполяризованным или произвольно поляризованным, может не иметь определенной или фиксированной поляризации (например, поляризация может изменяться со временем) или может иметь конкретную поляризацию (например, выходной луч 314 может иметь линейную поляризацию, эллиптическую поляризацию или круговую поляризацию).
[000120] По меньшей мере, в некоторых неограничивающих вариантах осуществления настоящей технологии выходной луч 314 и входной луч 316 могут быть, по существу, коаксиальными. Другими словами, выходной луч 314 и входной луч 316 могут по меньшей мере частично перекрываться или иметь общую ось распространения, так что входной луч 316 и выходной луч 314 перемещаются, по существу, по одному и тому же оптическому пути (хотя и в противоположных направлениях). Тем не менее, в других неограничивающих вариантах осуществления настоящей технологии выходной луч 314 и входной луч 316 могут не быть коаксиальными, или, другими словами, могут не перекрываться или не иметь общую ось распространения внутри лидарной системы 300 без отклонения от объем настоящей технологии.
[000121] Следует отметить, что по меньшей мере в некоторых неограничивающих вариантах осуществления настоящей технологии источник 302 света может поворачиваться, например, на 360 градусов или меньше, вокруг оси вращения (не изображена) лидарной системы 300, когда лидарная система 300 выполнена во вращающейся конфигурации. Однако в других вариантах осуществления источник 302 света может быть стационарным, даже когда лидарная система 300 реализована во вращающейся конфигурации, не выходя за рамки настоящей технологии.
Элемент светоделения
[000122] Продолжая ссылаться на фиг. 3, дополнительно предусмотрен элемент 304 светоделения, расположенный в корпусе 330. Например, как упоминалось ранее, элемент 304 светоделения выполнен с возможностью направления выходного луча 314 от источника 302 света к блоку 308 сканера. Элемент 304 светоделения также выполнен с возможностью направления входного луча 316, отраженного от объекта 320, в приемный блок 306 для дальнейшей обработки контроллером 310.
[000123] Однако, в соответствии с другими неограничивающими вариантами осуществления настоящей технологии элемент 304 светоделения может быть выполнен с возможностью разделения выходного луча 314 по меньшей мере на два компонента меньшей интенсивности, включая сканирующий луч (отдельно не изображенный), используемый для сканирования окружения 250 лидарной системы 300 и опорный луч (отдельно не изображен), который далее направляется на приемный блок 306.
[000124] Другими словами, в этих вариантах осуществления можно сказать, что элемент 304 светоделения выполнен с возможностью разделения интенсивности (оптической мощности) выходного луча 314 между сканирующим лучом и опорным лучом. В некоторых неограничивающих вариантах осуществления настоящей технологии элемент 304 разделения луча может быть выполнен с возможностью равного деления интенсивности выходного луча 314 между сканирующим лучом и опорным лучом. Однако в других неограничивающих вариантах осуществления настоящей технологии элемент 304 светоделения может быть выполнен с возможностью деления интенсивности выходного луча 314 при любом заранее определенном коэффициенте разделения. Например, элемент 304 светоделения может быть сконфигурирован так, чтобы использовать до 80% интенсивности выходного луча 314 для формирования сканирующего луча, а оставшуюся часть до 20% интенсивности выходного луча 314 - для формирования опорного луча. В еще других неограниченных вариантах осуществления настоящей технологии элемент 304 светоделения может быть выполнен с возможностью изменять коэффициент разделения для формирования сканирующего луча (например, от 1% до 95% интенсивности выходного луча 314).
[000125] Следует также отметить, что некоторая часть (например, до 10%) интенсивности выходного луча 314 может быть поглощена материалом элемента 304 светоделения, что зависит от его конкретной конфигурации.
[000126] В зависимости от реализации лидарной системы 300, элемент 304 светоделения может быть обеспечен в различных формах, включая, но не ограничиваясь: компонент светоделителя на основе стеклянной призмы, компонент светоделителя на основе полусеребряного зеркала, компонент светоделителя на основе дихроичной зеркальной призмы, компонент светоделителя на основе волоконной оптики и т.п.
[000127] Таким образом, согласно неограничивающим вариантам осуществления настоящей технологии неполный список регулируемых параметров, связанных с элементом 304 светоделения, на основе его конкретного применения, может включать, например, рабочий диапазон длин волн, который может варьироваться от конечного числа длин волн до более широкого светового спектра (например, от 1200 до 1600 нм); угол падения; поляризующий/неполяризующий и тому подобное.
[000128] В конкретном неограничивающем примере элемент 304 светоделения может быть реализован как волоконно-оптический компонент светоделителя, который может быть типа, доступного от OZ Optics Ltd., 219 Westbrook Rd Ottawa, Ontario K0A 1L0, Канада. Следует четко понимать, что элемент 304 светоделения может быть реализован в любом другом подходящем оборудовании.
Внутренние тракты луча
[000129] Как схематично изображено на фиг. 3, лидарная система 300 формирует множество внутренних трактов 312 луча, по которым распространяются выходной луч 314 (генерируемый источником 302 света) и входной луч 316 (принимаемый из окружения 250). В частности, свет распространяется по внутренним трактам 312 луча следующим образом: свет от источника 302 света проходит через элемент 304 светоделения к блоку 308 сканера и, в свою очередь, блок 308 сканера направляет выходной луч 314 наружу в направлении окружения 250.
[000130] Точно так же входной луч 316 следует по множеству внутренних трактов 312 луча к приемному блоку 306. В частности, входной луч 316 направляется блоком 308 сканера в лидарную систему 300 через элемент 304 светоделения в сторону приемного блока 306. В некоторых реализациях лидарная система 300 может быть оборудована трактами луча, которые направляют входной луч 316 непосредственно из окружения 250 в приемный блок 306 (без прохождения входного луча 316 через блок 308 сканера).
[000131] Следует отметить, что в различных неограничивающих вариантах осуществления настоящей технологии множество внутренних трактов 312 луча может включать в себя множество оптических компонентов. Например, лидарная система 300 может включать в себя один или более оптических компонентов, выполненных с возможностью настройки, формирования, фильтрации, изменения, управления или направления выходного луча 314 и/или входного луча 316. Например, лидарная система 300 может включать в себя одну или более линз, зеркал, фильтров (например, полосовых или интерференционных фильтров), оптических волокон, циркуляторов, светоделителей, поляризаторов, поляризационных светоделителей, волновых пластин (например, полуволновые или четвертьволновые пластины), дифракционные элементы, микроэлектромеханические (МЕМ) элементы, коллимирующие элементы или голографические элементы.
[000132] Предполагается, что по меньшей мере в некоторых неограничивающих вариантах осуществления настоящей технологии данный внутренний тракт луча и другой внутренний тракт луча из множества внутренних трактов 312 луча могут совместно использовать по меньшей мере некоторые общие оптические компоненты, однако это может не иметь место в каждом варианте осуществления настоящей технологии.
Блок сканера
[000133] Вообще говоря, блок 308 сканера направляет выходной луч 314 в одном или нескольких направлениях далее к окружению 250. Блок 308 сканера связан с возможностью осуществления связи с контроллером 310. По существу, контроллер 310 выполнен с возможностью управления блоком 308 сканера, чтобы направлять выходной луч 314 в желаемом направлении далее и/или по заранее определенному шаблону сканирования. Вообще говоря, в контексте настоящего описания «шаблон сканирования» может относиться к шаблону или пути, по которому выходной луч 314 направляется блоком 308 сканера во время работы.
[000134] В некоторых неограничивающих вариантах осуществления настоящей технологии контроллер 310 выполнен с возможностью заставлять блок 308 сканера сканировать выходной луч 314 по множеству горизонтальных угловых диапазонов и/или вертикальных угловых диапазонов; общая угловая протяженность, на которой блок 308 сканера сканирует выходной луч 314, называется здесь полем обзора (FoV). Предполагается, что конкретное расположение, ориентация и/или угловые диапазоны могут зависеть от конкретной реализации лидарной системы 300. Поле обзора обычно включает в себя множество интересующих областей (ROI), определенных как части поля обзора, которые могут содержать, например, интересующие объекты. В некоторых реализациях блок 308 сканера может быть выполнен с возможностью дальнейшего исследования выбранной интересующей области (ROI) 325. ROI 325 лидарной системы 300 может относиться к площади, объему, области, угловому диапазону и/или части (ам) окружения 250, вокруг которого лидарная система 300 может быть выполнена с возможностью сканирования и/или может захватывать данные.
[000135] Следует отметить, что местоположение объекта 320 в окружении 250 транспортного средства 220 может перекрываться, охватываться или заключаться по меньшей мере частично в ROI 325 лидарной системы 300.
[000136] Согласно некоторым неограничивающим вариантам осуществления настоящей технологии блок 308 сканера может быть выполнен с возможностью сканирования выходного луча 314 по горизонтали и/или вертикали, и, как таковая, ROI 325 лидарной системы 300 может иметь горизонтальное направление и вертикальное направление. Например, ROI 325 может быть определена под углом 45 градусов в горизонтальном направлении и 45 градусов в вертикальном направлении. В некоторых реализациях разные оси сканирования могут иметь разную ориентацию.
[000137] В некоторых вариантах осуществления блок 308 сканера включает в себя по меньшей мере одно зеркало 309, которое будет описано более подробно ниже. В некоторых вариантах осуществления блок 308 сканера не включает гальваническое зеркало. В некоторых вариантах осуществления блок 308 сканера не включает в себя беспроводные вращающиеся компоненты.
[000138] В некоторых неограничивающих вариантах осуществления настоящей технологии блок 308 сканера может дополнительно включать в себя множество других оптических компонентов и/или компонентов механического типа для выполнения сканирования выходного луча 314. Например, блок 308 сканера может включать в себя одно или более зеркал, призм, линз, компонентов MEM, пьезоэлектрических компонентов, оптических волокон, разделителей, дифракционных элементов, коллимирующих элементов и т.п. Следует отметить, что блок 308 сканера также может включать в себя один или более дополнительных исполнительных механизмов (отдельно не изображенных), приводящих в движение по меньшей мере некоторые из других оптических компонентов для вращения, наклона, поворота или перемещения под углом вокруг одной или нескольких осей, например.
[000139] Таким образом, лидарная система 300 может использовать предварительно заданный шаблон сканирования для формирования облака точек, по существу покрывающего ROI 325 лидарной системы 300. Как будет описано более подробно ниже, это облако точек лидарной системы 300 может использоваться для визуализации многомерной карты объектов в окружении 250 транспортного средства 220.
[000140] Как станет очевидно из описания, представленного в данном документе ниже, в некоторых неограничивающих вариантах осуществления настоящей технологии блок 308 сканера зеркала может быть выполнен с возможностью (i) уменьшения мертвого времени между передачей различных импульсов света в ROI 325, и/или (ii) быстрого перемещения между разными полями обзора, например, в вертикальном направлении.
Приемный блок
[000141] Согласно некоторым неограничивающим вариантам осуществления настоящей технологии приемный блок 306 связан с возможностью осуществления связи с контроллером 310 и может быть реализован множеством способов. Согласно настоящей технологии, приемный блок 306 включает в себя фотодетектор, но может включать (но не ограничивается) фотоприемник, оптический приемник, оптический датчик, детектор, оптический детектор, оптические волокна и т.п. Как упомянуто выше, в некоторых неограничивающих вариантах осуществления настоящей технологии приемный блок 306 может быть выполнен с возможностью сбора или обнаружения по меньшей мере части входного луча 316 и формирования электрического сигнала, который соответствует входному лучу 316. Например, если входной луч 316 включает в себя оптический импульс, приемный блок 306 может формировать импульс электрического тока или напряжения, который соответствует оптическому импульсу, обнаруженному приемным блоком 306.
[000142] Предполагается, что в различных неограничивающих вариантах осуществления настоящей технологии приемный блок 306 может быть реализован с одним или несколькими лавинными фотодиодами (APD), одним или несколькими однофотонными лавинными диодами (SPAD), одним или несколькими PN-фотодиодами (например, структурой фотодиода, образованной полупроводником p-типа и полупроводником n-типа), одним или несколькими PIN-фотодиодами (например, структурой фотодиода, образованной нелегированной собственной полупроводниковой областью, расположенной между областями p-типа и n-типа), и тому подобное.
[000143] В некоторых неограничивающих вариантах осуществления приемный блок 306 также может включать в себя схему, которая выполняет усиление сигнала, дискретизацию, фильтрацию, преобразование сигнала, аналого-цифровое преобразование, аналого-цифровое преобразование времени, обнаружение импульсов, обнаружение порога, обнаружение нарастающего фронта, обнаружение спадающего фронта и тому подобное. Например, приемный блок 306 может включать в себя электронные компоненты, выполненные с возможностью преобразования принятого фототока (например, тока, создаваемого APD в ответ на принятый оптический сигнал) в сигнал напряжения. Приемный блок 306 может также включать в себя дополнительную схему для создания аналогового или цифрового выходного сигнала, который соответствует одной или нескольким характеристикам (например, нарастающему фронту, спадающему фронту, амплитуде, длительности и т.п.) принятого оптического импульса.
Контроллер
[000144] В зависимости от реализации контроллер 310 может включать в себя один или более процессоров, специализированную интегральную схему (ASIC), программируемую пользователем вентильную матрицу (FPGA) и/или другие подходящие схемы. Контроллер 310 также может включать в себя энергонезависимую компьютерно-читаемую память для хранения инструкций, выполняемых контроллером 310, а также данных, которые контроллер 310 может создавать на основе сигналов, полученных от других внутренних компонентов лидарной системы 300, и/или может обеспечить сигналы к другим внутренним компонентам лидарной системы 300. Память может включать в себя энергозависимые (например, RAM) и/или энергонезависимые (например, флэш-память, жесткий диск) компоненты. Контроллер 310 может быть выполнен с возможностью формирования данных во время работы и сохранения их в памяти. Например, эти данные, сформированные контроллером 310, могут указывать на точки данных в облаке точек лидарной системы 300.
[000145] Предполагается, что по меньшей мере в некоторых неограничивающих вариантах осуществления настоящей технологии контроллер 310 может быть реализован способом, аналогичным реализации электронного устройства 210 и/или компьютерной системы 100, не выходя за рамки объема настоящей технологии. В дополнение к сбору данных от приемного блока 306, контроллер 310 также может быть выполнен с возможностью обеспечения управляющих сигналов и потенциально получения диагностических данных от источника 302 света и блока 308 сканера.
[000146] Как указано ранее, контроллер 310 связан с возможностью осуществления связи с источником 302 света, блоком 308 сканера и приемным блоком 306. В некоторых неограничивающих вариантах осуществления настоящей технологии контроллер 310 может быть выполнен с возможностью приема электрических запускающих импульсов от источника 302 света, где каждый электрический запускающий импульс соответствует излучению оптического импульса источником 302 света. Контроллер 310 может дополнительно обеспечивать инструкции, управляющий сигнал и/или сигнал запуска источнику 302 света, указывающий, когда источник 302 света должен генерировать оптические импульсы, указывающие, например, выходной луч 314.
[000147] Так же, как пример, контроллер 310 может быть выполнен с возможностью отправки электрического запускающего сигнала, который включает в себя электрические импульсы, так что источник 302 света излучает оптический импульс, представленный выходным лучом 314, в ответ на каждый электрический импульс электрического запускающего сигнала. Также предполагается, что контроллер 310 может заставить источник 302 света регулировать одну или более характеристик выходного луча 314, создаваемого источником 302 света, таких как, помимо прочего: частота, период, длительность, энергия импульса, пиковая мощность, средняя мощность и длина волны оптических импульсов.
[000148] В соответствии с настоящей технологией контроллер 310 выполнен с возможностью определения значения «времени пролета» для оптического импульса, чтобы определять расстояние между лидарной системой 300 и одним или несколькими объектами в поле обзора, как это будет описано ниже. Время пролета основано на информации о времени, связанной с (i) первым моментом времени, когда заданный оптический импульс (например, выходного луча 314) был испущен источником 302 света, и (ii) вторым моментом времени, когда часть заданного оптического импульса (например, от входного луча 316) была обнаружена или принята приемным блоком 306. В некоторых неограничивающих вариантах осуществления настоящей технологии первый момент может указывать на момент времени, когда контроллер 310 испускает соответствующий электрический импульс, связанный с данным оптическим импульсом; и второй момент времени может указывать на момент времени, когда контроллер 310 принимает от приемного блока 306 электрический сигнал, сформированный в ответ на прием части заданного оптического импульса от входного луча 316.
[000149] В других неограничивающих вариантах осуществления настоящей технологии, где элемент 304 светоделения выполнен с возможностью разделения выходного луча 314 на сканирующий луч (не показан) и опорный луч (не показан), первый момент времени может быть моментом времени приема, от принимающего блока 306, первого электрического сигнала, формируемого в ответ на прием части опорного луча. Соответственно, в этих вариантах осуществления второй момент времени может быть определен как момент времени приема контроллером 310 из приемного блока 306 второго электрического сигнала, формируемого в ответ на прием другой части данного оптического импульса от входного луча 316.
[000150] В соответствии с настоящей технологией контроллер 310 выполнен с возможностью определения на основе первого момента времени и второго момента времени значения времени пролета и/или значения фазовой модуляции для излучаемого импульса выходного луча 314. Значение T времени пролета, в некотором смысле, время «кругового пути» для излучаемого импульса, чтобы пройти от лидарной системы 300 к объекту 320 и обратно в лидарную систему 300. Таким образом, контроллер 310 в общих чертах выполнен с возможностью определения расстояния 318 в соответствии со следующим уравнением:
где D - расстояние 318, T - значение времени пролета, а c - скорость света (приблизительно 3,0 × 108 м/с).
[000151] Как упоминалось ранее, лидарная система 300 может использоваться для определения расстояния 318 до одного или нескольких других потенциальных объектов, расположенных в окружении 250. Путем сканирования выходного луча 314 через ROI 325 лидарной системы 300 в соответствии с заранее определенным шаблоном сканирования, контроллер 310 выполнен с возможностью отображения расстояний (аналогичных расстоянию 318) до соответствующих точек данных в пределах ROI 325 лидарной системы 300. В результате контроллер 310 обычно выполнен с возможностью визуализации этих точек данных, захваченных последовательно (например, облака точек), в форме многомерной карты. В некоторых реализациях данные, относящиеся к определенному времени пролета и/или расстояниям до объектов, могут отображаться в различных информационных форматах.
[000152] В качестве примера, эта многомерная карта может использоваться электронным устройством 210 для обнаружения или иной идентификации объектов или определения формы или расстояния до потенциальных объектов в пределах ROI 325 лидарной системы 300. Предполагается, что лидарная система 300 может быть выполнена с возможностью многократного/итеративного захвата и/или формирования облаков точек с любой подходящей скоростью для данного приложения.
[000153] Блок сканера
[000154] Со ссылкой на фиг. 4-13, некоторые варианты осуществления блока 308 сканера в соответствии с настоящим раскрытием теперь будут описаны более подробно. Согласно некоторым вариантам осуществления настоящей технологии блок 308 сканера выполнен с возможностью выборочного определения различных интересующих областей 325 в пределах поля обзора. Таким образом, посредством определенных вариантов осуществления переключение между различными интересующими областями 325 может быть обеспечено более быстрым и/или более эффективным способом. Кроме того, блок 308 сканера может позволить быстро и/или эффективно адаптировать шаблон сканирования, что будет более подробно описано ниже. В некоторых вариантах осуществления блок 308 сканера уменьшает или минимизирует мертвое время между последовательными выходными лучами 314.
[000155] В широком смысле, со ссылкой на фиг. 4 и 5, блок 308 сканера содержит множество отражающих поверхностей 340, выполненных с возможностью перемещения таким образом, что каждая отражающая поверхность 340 может передавать выходной луч 314 как вертикальный расходящийся луч 342 вдоль вертикальной плоскости 344 расхождения и горизонтальный расходящийся луч 346 вдоль горизонтальной плоскости 348 расхождения для определения шаблона сканирования в пределах поля обзора. Каждую отражающую поверхность 340 можно заставить наклоняться вверх и вниз для определения вертикального расходящегося луча 342. Каждую отражающую поверхность 340 также можно заставить перемещаться в горизонтальной плоскости 348 расхождения, чтобы определить горизонтальный расходящийся 346 луч. Кроме того, последовательности выходных лучей 314 могут быть вызваны падением на разные отражающие поверхности 340, которые могут быть выполнены с возможностью формирования одного и того же или другого расходящегося луча, путем координации тайминга горизонтального движения отражающих поверхностей и тайминга передач выходного луча 314. Могут быть предусмотрены один или более приводов перемещения, чтобы вызывать перемещение отражающих поверхностей 340. В некоторых вариантах осуществления обеспечен привод горизонтального перемещения, который может заставить каждую отражающую поверхность 340 перемещаться в горизонтальной плоскости 348 расхождения для передачи горизонтального расходящегося луча 346, и привод вертикального перемещения, который может заставить каждую отражающую поверхность 340 перемещаться в пределах вертикальной плоскости 344 расхождения для определения вертикального расходящегося луча 342.
[000156] Более конкретно, каждая отражающая поверхность 340 предусмотрена на соответствующем зеркальном компоненте 350 (таком как зеркало 309), блок 308 сканера содержит множество подключенных к нему зеркальных компонентов 350. В некоторых вариантах осуществления привод горизонтального перемещения представляет собой вращающийся компонент 352 ступицы, к которому прикреплены зеркальные компоненты 350. Вращающийся компонент 352 ступицы содержит корпус 354 ступицы, который вращается вокруг оси 356 вращения ступицы. Множество отражающих поверхностей 340 расположены обращенными наружу вокруг компонента 352 ступицы. Компонент 352 ступицы может быть выполнен с возможностью вращения в одном или обоих направлениях - по часовой стрелке или против часовой стрелки, вокруг оси 356 вращения ступицы. Передача одиночного выходного луча 314 может быть вызвана падением на множество отражающих поверхностей 340 посредством вращения компонента 352 ступицы. Благодаря разным наклонным положениям множества отражающих поверхностей 340 в некоторых вариантах осуществления расходящийся луч может быть вызван для быстрого и эффективного переключения между верхним и нижним полем обзора.
[000157] В проиллюстрированных вариантах осуществления блок 308 сканера имеет шесть зеркальных компонентов 350. В других вариантах осуществления (не показаны) могут быть предусмотрены два, три, четыре, пять, семь, восемь, девять или 10 зеркальных компонентов 350. В некоторых вариантах осуществления предусмотрены по меньшей мере два зеркальных компонента 350.
[000158] Каждый зеркальный компонент 350 имеет переднюю сторону 358 и заднюю сторону 360. Отражающая поверхность 340 каждого зеркального компонента 350 находится на передней стороне 358. На задней стороне 360 каждого зеркального компонента 350 предусмотрен соединитель 362 для прикрепления зеркального компонента 350 к компоненту 352 ступицы с соответствующей отражающей поверхностью 340, обращенной наружу. Каждый зеркальный компонент 350 соединен с компонентом 352 ступицы таким образом, что позволяет зеркальному компоненту 350 (i) вращаться вместе с компонентом 352 ступицы вокруг оси 356 вращения ступицы и (ii) наклоняться назад и вперед относительно оси 364 наклона зеркала, ось 364 наклона зеркала расположена поперек оси 356 вращения ступицы и отстоит от нее. В некоторых вариантах осуществления соединитель 362 позволяет зеркальному компоненту 350 наклоняться вверх и вниз по одной или нескольким параллельным плоскостям наклона (Фиг. 6) и вращаться в одной или нескольких параллельных плоскостях вращения ступицы (Фиг. 7), которые, по существу, поперечны одной или нескольким плоскостям наклона. Таким образом, привод горизонтального перемещения можно рассматривать как компонент 352 ступицы, вращение которого вызывает горизонтальное перемещение зеркального компонента 350.
[000159] Как лучше всего видно на фиг. 4 и 7, ось 364 наклона зеркала множества зеркальных компонентов 350 расположена по круговой окружности 366 компонента 352 ступицы. Оси 364 наклона зеркала зеркальных компонентов 350 лежат в одной плоскости друг с другом. Соединитель 362 и ось 364 наклона зеркала расположены примерно на половине длины отражающей поверхности 340. Зеркальный компонент 350 может перемещаться вокруг оси 364 наклона зеркала для определения угла 368 наклона относительно опорной плоскости 372 (фиг. 6). Угол 368 наклона каждого используемого зеркального компонента 350 может быть одинаковым или отличаться друг от друга. Каждый зеркальный компонент 350 имеет максимально допустимый диапазон угла наклона, в пределах которого угол 368 наклона каждого используемого зеркального компонента 350 может регулироваться контроллером 310 способом, который будет объяснен ниже.
[000160] Теперь обратимся к относительной конфигурации отражающих поверхностей 340 каждого зеркального компонента 350 относительно друг друга. Отражающие поверхности 340 шести зеркальных компонентов 350 проходят по окружности вокруг компонента 353 ступицы в конфигурации бок о бок с минимальным расстоянием между ними. Как упомянуто выше, могут быть предусмотрены два или более зеркальных компонента 350. Различные варианты осуществления блоков 308 сканера с различным количеством зеркальных компонентов 350 показаны на фиг. 8-10, на которых зеркальные компоненты 350 показаны в ненаклонном нейтральном положении для простоты сравнения. Под нейтральным положением подразумевается, что отражающая поверхность 340 параллельна опорной плоскости 372. Угол между соседними отражающими поверхностями 340 зеркальных компонентов 350 зависит от количества предусмотренных зеркальных компонентов 350. Для блока 308 сканера с шестью зеркальными компонентами 350 угол между соседними отражающими поверхностями составляет 60°, для модуля 308 сканера с четырьмя зеркальными компонентами 350 угол между соседними отражающими поверхностями составляет 40°. Этот угол между отражающими поверхностями 340 будет определять вращение, необходимое приводу горизонтального перемещения (то есть компоненту 352 ступицы), чтобы расположить последующую отражающую поверхность 340 последующего зеркального компонента 350 по отношению к выходному лучу 314 при использовании (при условии, что путь выходного луча 314 не перемещается).
[000161] Компонент 352 ступицы и зеркальные компоненты 350 образуют многогранную конфигурацию с зеркальными компонентами 350, определяющими стороны многогранника. С шестью зеркальными компонентами 350 сканирующий блок 308 напоминает шестиугольную призму.
[000162] Форма и конфигурация каждой отражающей поверхности 340 не ограничены, и каждая отражающая поверхность 340 может иметь любую подходящую форму, размер и конфигурацию в соответствии с желаемой интересующей областью 325 и шаблоном сканирования. Например, в некоторых вариантах осуществления каждая отражающая поверхность 340 является плоской. Каждая отражающая поверхность может иметь прямоугольную или любую другую подходящую форму. Каждая отражающая поверхность 340 может покрывать всю переднюю сторону 358 соответствующего зеркального компонента 350 или его часть.
[000163] В некоторых других вариантах осуществления (не показаны) отражающая поверхность 340 может быть подразделена на частично отражающие поверхности, имеющие разные отражающие свойства. На зеркальном компоненте 350 может быть предусмотрено любое количество отражающих зон. В некоторых вариантах осуществления отражающая поверхность 340 может быть неплоской (не показана), например, одной или более из следующих: изогнутой выпуклой, изогнутой вогнутой и многогранной с плоскими или неплоскими гранями. Криволинейная поверхность может определяться радиусом кривизны, произвольным сплайном или уравнением.
[000164] В некоторых вариантах осуществления привод вертикального перемещения содержит возвратно-поступательный базовый элемент конической формы, как будет описано ниже со ссылкой на фиг. 5 и 11-13.
[000165] На задней стороне 360 каждого зеркального компонента 350 предусмотрен ролик 376, соединенный с зеркальным компонентом 350 парой рычагов 378. Ролик 376 выполнен с возможностью вращения вокруг оси 380 вращения ролика. Ролик 376 может быть изготовлен из любого подходящего материала. В некоторых вариантах осуществления ролик имеет поверхность, изготовленную из материала, обладающего демпфирующими свойствами для уменьшения или минимизации шума (например, из упругого материала, такого как полимер или резина). В некоторых других вариантах осуществления ролик имеет поверхность, выполненную с возможностью обеспечения точности движения, например, из неэластичного материала.
[000166] В основании 382 компонента 352 ступицы предусмотрен базовый компонент 384, расположенный по окружности вокруг основания 382 компонента 352 ступицы и выполненный с возможностью возвратно-поступательного движения параллельно оси 356 вращения ступицы. Базовый компонент 384 имеет поверхность 386, по которой может катиться ролик 376, и которой ось 380 вращения ролика может быть параллельна. Когда компонент 352 ступицы вращается при использовании, ролик 376 выполнен с возможностью катиться по поверхности 386.
[000167] В некоторых вариантах осуществления базовый компонент 384 имеет форму усеченного конуса с центральным отверстием 392, в котором расположен компонент 352 ступицы. Базовый компонент 384 выполнен с возможностью перемещения относительно компонента 352 ступицы. Базовый компонент 384 выполнен с возможностью перемещения в направлении, параллельном оси 356 вращения ступицы, ниже высоты 394 оси 364 наклона зеркала, чтобы регулировать угол наклона отражающей поверхности 340 зеркального компонента 350. Базовый компонент 384 имеет радиус 388, который изменяется по высоте 390 базового компонента 384, так что возвратно-поступательное движение базового компонента 384 относительно ролика 376 заставляет отражающую поверхность 340 поворачиваться вокруг оси 364 наклона зеркала, сохраняя при этом контакт с поверхность 386.
[000168] В некоторых вариантах осуществления радиус 388 базового компонента 384 увеличивается по его высоте 390. В качестве одного примера, проиллюстрированного на фиг. 11-13, в положении нейтрального наклона (фиг. 11) базовый компонент 384 находится в самом верхнем положении, соответствующем наибольшему радиусу. Когда базовый компонент 384 перемещается вниз из нейтрального положения наклона, ролик 376 перемещается по поверхности 386 базового компонента 384 с уменьшающимся радиусом 388, заставляя зеркальный компонент 350 наклоняться вниз (фиг. 12). Когда ролик 376 контактирует с наименьшим радиусом 388 базового компонента 384 в самом нижнем положении, угол наклона отражающей поверхности 340 имеет максимальный наклон вниз (фиг. 13).
[000169] Следовательно, в некоторых вариантах осуществления угол 368 наклона зеркального компонента 350 может быть определен на основе положения базового компонента 384. В варианте осуществления, показанном на фиг. 11-13, зеркальный компонент 350 выполнен с возможностью перемещения между нейтральным положением (в котором угол наклона 368 относительно опорной плоскости 372 равен нулю градусов) и положением с наклоном вниз. В других вариантах осуществления угол 368 наклона может охватывать другие положения зеркального компонента 350, такие как положение с наклоном вверх. Угол 368 наклона может составлять примерно 40°, например, примерно 15° выше нейтрального положения и примерно 25° ниже нейтрального положения.
[000170] Следует понимать, что базовый компонент 384 может быть выполнен с возможностью совершать возвратно-поступательное движение вверх и вниз в пределах максимального диапазона перемещения или в пределах поддиапазона этого максимального диапазона. Другими словами, угол 368 наклона зеркального компонента 350, вызванный перемещением базового компонента 384, может быть любым поддиапазоном в пределах максимально допустимого диапазона.
[000171] В некоторых вариантах осуществления базовый компонент 384 может содержать рисунок поверхности переменной высоты. Например, рисунок поверхности базового компонента 384 может содержать волнообразный рисунок высоты на базовом компоненте конической формы. Когда компонент ступицы вращается, зеркальный компонент 350 перемещается согласно волнистости, а также радиусу базового компонента 384.
[000172] В некоторых вариантах осуществления базовый компонент 384 перемещается вверх и вниз, так что первая подгруппа отражающих поверхностей имеет первый угол наклона, а вторая подгруппа отражающих поверхностей имеет второй угол наклона. Первый угол наклона и второй угол наклона могут отличаться друг от друга. В некоторых вариантах осуществления первая подгруппа отражающих поверхностей 340 содержит пару или тройку отражающих поверхностей 340, которые не примыкают друг к другу. В некоторых вариантах осуществления вторая подгруппа отражающих поверхностей 340 содержит пару или тройку отражающих поверхностей 340, которые не примыкают друг к другу. В некоторых вариантах осуществления первая подгруппа отражающих поверхностей 340 и вторая подгруппа отражающих поверхностей поочередно расположены вокруг компонента 352 ступицы.
[000173] В вариантах осуществления, описанных выше, блок 308 сканера сконфигурирован так, что выходной луч 314 принимается на заданной отражающей поверхности 340, которая имеет заданный угол 368 наклона относительно опорной плоскости 372. В других вариантах осуществления блок 308 сканера сконфигурирован так, что выходной луч принимается на заданной отражающей поверхности 340, в то время как зеркальный компонент 350 поворачивается вокруг оси 364 наклона зеркала. В этих вариантах осуществления можно считать, что отражающая поверхность 340 представляет заданный диапазон углов наклона для выходного луча 314. Движение отражающей поверхности 340 вызывается возвратно-поступательным движением базового компонента 384.
[000174] В некоторых других вариантах осуществления привод вертикального перемещения содержит любой другой механизм, который может заставить зеркальный компонент 350 поворачиваться вокруг оси 364 наклона зеркала.
[000175] Например, в некоторых вариантах осуществления привод вертикального перемещения содержит привод с линейной обмоткой (не показан), содержащий узел катушки и постоянный магнит. Ток, протекающий через узел катушки, при взаимодействии с магнитной силой постоянного магнита создает силу, перпендикулярную направлению тока, которая заставляет зеркальный компонент 350 перемещаться.
[000176] В некоторых вариантах осуществления привод вертикального перемещения содержит рычаг, приводимый в действие двигателем (не показан), который может контактировать с зеркальным компонентом 350, заставляя его перемещаться вокруг оси 364 наклона зеркала. Рычаг, который контактирует с зеркальным компонентом 350, может быть рычагом, длина которого может быть увеличена, или рычагом фиксированной длины.
[000177] Приводы вертикального и/или горизонтального перемещения могут быть связаны с возможностью осуществления связи с контроллером 310 или другими контроллерами для управления перемещением зеркального компонента 350. В некоторых вариантах осуществления компонент 352 ступицы соединен с контроллером 310, который может управлять вращательным движением компонента 310 ступицы, а базовый компонент 384 соединен с контроллером 310, который может управлять возвратно-поступательным движением базового компонента 384.
[000178] В некоторых вариантах осуществления контроллер 310, который соединен с возможностью осуществления связи с источником 302 света, а также с приводами вертикального и/или горизонтального перемещения блока 308 сканера, выполнен с возможностью вызывать относительное перемещение между выходным лучом 314 и блоком 308 сканера для избирательного контакта заданного выходного луча 314 с заданной отражающей поверхностью для излучения заданного горизонтального расходящегося луча 346 и заданного вертикального расходящегося луча 342 для желаемого шаблона сканирования в интересующей области 325.
[000179] В этом отношении контроллер 310 выполнен с возможностью перемещать компонент 352 ступицы, чтобы представить заданную отражающую поверхность 340 выходному лучу 314 с заданной скоростью вращения, которая может определять горизонтальный расходящийся луч 346, и перемещать базовый компонент 384 для обеспечения отражающей поверхности 340, на которую падает выходной луч 314, с заданным диапазоном 368 углов наклона, чтобы определять заданный вертикальный расходящийся луч 342.
[000180] В некоторых вариантах осуществления контроллер 310 может быть выполнен с возможностью определения последовательности отражающих поверхностей 340 и диапазонов углов наклона, чтобы генерировать заранее определенный шаблон сканирования. Это может быть выполнено, например, контроллером 310, с использованием определенных соотношений между одним или несколькими параметрами, такими как: соотношение между положением базового компонента 384 и диапазоном 368 угла наклона; соотношение между скоростью вращения компонента 352 ступицы и горизонтальным расходящимся лучом 346.
[000181] В некоторых других вариантах осуществления контроллер 310 может быть сконфигурирован так, чтобы блок 308 сканера генерировал заданный шаблон сканирования на основе одного или нескольких триггеров, таких как определение любым способом, что сканирование заданной интересующей области в пределах поля обзора обязательно.
[000182] Одним из таких примеров этого сценария является обнаружение лидарной системой 300 неопознанного объекта в одной области поля обзора транспортного средства 220, что требует дальнейшего исследования. Другой такой пример - обнаружение неопознанного объекта после неподробного сканирования (например, мусор на дороге). В этом случае контроллер 310 может определить, что интересующие области, в которых расположен мусор, должны быть просканированы, и вызвать контакт между выходным лучом 314 и заданной отражающей поверхностью 340.
[000183] В некоторых других вариантах осуществления запускающее событие для формирования заданного шаблона сканирования содержит предварительно заданное географическое запускающее событие. Контроллер 310 может определять наличие заранее определенного географического запускающего события, такого как местоположение GPS и т.д. Например, заранее определенное географическое запускающее событие может содержать местоположение известной опасной точки, такой как, но не ограничиваясь этим, крутой поворот на дороге, крутой уклон, крутой спуск, слепой поворот, ветреный переход, школьный переход, переход для животных, общеизвестно оживленный перекресток, район с высокими зданиями, район без высоких зданий. Контроллер 310 может быть выполнен с возможностью генерации заранее определенного сканирования на основе заданного заранее определенного географического запускающего события. Например, на школьном переходе выходной луч 314 может формировать шаблон сканирования, соответствующий росту и скорости движения детей. В другом примере, когда транспортное средство 220 находится в области без высоких зданий, контроллер 310 может быть вынужден формировать шаблон сканирования, который находится ниже в поле обзора.
[000184] В некоторых других вариантах осуществления запускающее событие для формирования заданного шаблона сканирования содержит предварительно заданное запускающее событие окружающей среды, например, при определении датчиком определенных условий окружающей среды, таких как сильный дождь.
[000185] Контроллер 310 выполнен с возможностью выполнения способа 1000 для работы лидарной системы, такой как лидарная система 300, или блока сканера лидарной системы, такого как блок 308 сканера, таким образом, чтобы можно было переключаться между различными интересующими областями в пределах поля обзора для обнаружения объектов в различных частях окружения транспортного средства 220 в определенных вариантах осуществления.
Реализуемые компьютером способы
[000186] Теперь со ссылкой на фиг. 14 изображена блок-схема способа 1000 для формирования шаблона сканирования в интересующей области с помощью сканера лидарной системы автономного транспортного средства в соответствии с неограничивающими вариантами осуществления настоящей технологии. Способ 1000 может выполняться контроллером 310.
[000187] ЭТАП 1010: Обеспечение вращения компонента ступицы вокруг оси вращения ступицы, к которому прикреплены по меньшей мере три зеркальных компонента, каждый зеркальный компонент имеет отражающую поверхность, направленную наружу от компонента ступицы, для позиционирования заданного одного из по меньшей мере трех зеркальных компонентов так, что испускаемый световой луч из лидарной системы падает на заданный один зеркальный компонент для передачи горизонтального расходящегося луча
[000188] Способ 1000 включает в себя принуждение компонента ступицы блока сканера, такого как компонент 352 ступицы блока 308 сканера, к вращению вокруг оси вращения ступицы, такой как ось 356 вращения ступицы. Блок 308 сканера содержит по меньшей мере два зеркальных компонента 350, прикрепленных к компоненту 352 ступицы и выполненных с возможностью вращения вместе с компонентом 352 ступицы. Каждый зеркальный компонент 350 имеет отражающую поверхность 340, обращенную наружу от компонента 352 ступицы. На этапе 1010 поворот компонента 352 ступицы позиционирует заданный один из по меньшей мере трех зеркальных компонентов 350, так что выходной луч 315 лидарной системы падает на отражающую поверхность 340 заданного одного зеркального компонента 350. Выходной луч 314 затем передается как расходящийся луч, включая горизонтальный расходящийся луч, такой как горизонтальный расходящийся луч 346.
[000189] Способ 1000 может дополнительно содержать контроллер 310, заставляющий источник излучения лидарной системы, такой как источник 302 света, излучать выходной луч 314 вдоль внутреннего пути излучения лидарной системы. Лидарная система может содержать вариант осуществления лидарной системы 300.
[000190] ЭТАП 1020: контроллер вызывает наклон заданного зеркального компонента относительно компонента ступицы на заранее определенный первый угол наклона для передачи первого вертикального расходящегося луча
[000191] Способ 1000 включает в себя этап 1020, на котором контроллер 310 вызывает наклон заданного одного зеркального компонента 350 относительно компонента 352 ступицы на первый угол наклона, чтобы передать первый вертикальный расходящийся луч. Контроллер 310 может дополнительно включать в себя обеспечение дополнительного вращения компонента 352 ступицы вокруг оси 356 вращения ступицы для позиционирования заданного другого одного из по меньшей мере трех зеркальных компонентов 350 так, чтобы другой излучаемый световой луч из лидарной системы падал на заданный другой из по меньшей мере трех зеркальных компонентов 350. Заданный другой один из по меньшей мере трех зеркальных компонентов 350 может содержать заданный второй угол наклона для передачи второго вертикального расходящегося луча. В этом отношении способ 1000 может включать в себя контроллер 310, дополнительно содержащий вызов наклона данного другого одного зеркального компонента 350 относительно компонента 352 ступицы на предварительно заданный второй угол наклона для передачи второго вертикального расходящегося луча. Заданный первый угол наклона и заданный второй угол наклона могут быть одинаковыми или разными.
[000192] Способ 1000 может включать в себя контроллер 310, координирующий излучение светового луча с вращением компонента 352 ступицы, так что последовательные световые лучи падают на разные зеркальные компоненты 350.
[000193] Блок 308 сканера может включать в себя базовый компонент 384, который выполнен с возможностью перемещения вверх и вниз в определенном линейном диапазоне, чтобы заставить зеркальный компонент 350 наклоняться в пределах определенного максимально допустимого диапазона наклона. В этом отношении способ 1000 может дополнительно содержать контроллер 310, заставляющий базовый компонент 384 совершать возвратно-поступательное движение в пределах первого линейного диапазона, чтобы вызвать наклон данного одного из по меньшей мере трех зеркальных компонентов 350 в пределах первого диапазона углов наклона.
[000194] На фиг. 15 и 16 показаны определенные варианты осуществления, в которых блок 308 сканера содержит шесть зеркальных компонентов 350 и находится в первом и втором положении соответственно. После того, как контроллер 310 вызывает вращение компонента 352 ступицы, при t=1 (первое положение), показанном на фиг. 15, данный один из шести зеркальных компонентов 396 располагается так, что выходной луч 314 падает на соответствующую отражающую поверхность 398 (изображение слева, которое показывает вид сверху компонента 352 ступицы и шести зеркальных компонентов 350), и с заранее определенным первым углом наклона относительно опорной плоскости 372 при нулевом градусе (вид справа). При t=2 (второе положение), показанном на фиг. 16, заданный другой из шести зеркальных компонентов 402 расположен так, что выходной луч 314 падает на соответствующую отражающую поверхность 404 (вид слева), и с заданным вторым углом 406 наклона (вид справа), который отличается от первого угла 400 наклона.
В другом варианте осуществления (не показан) базовый компонент 384 приводится в движение так, что первая подгруппа отражающих поверхностей 398 имеет другой угол наклона или диапазон углов наклона по сравнению с углом наклона или диапазоном углов наклона второй подгруппы отражающих поверхностей 398. Это может быть вызвано тем, что происходит в пределах одной передачи выходного луча 314. Первое и второе подмножества могут быть расположены поочередно вокруг компонента ступицы или по любому другому заданному шаблону. Углы наклона отражающих поверхностей могут быть заданы для попеременного излучения расходящихся лучей в верхней и нижней частях поля обзора, вызывая быстрое переключение между верхней и нижней частями. Смежные отражающие поверхности, которые имеют разные углы наклона или диапазоны углов наклона, могут быть направлены к той или иной из верхней и нижней частей поля обзора. Когда предусмотрены две смежные отражающие поверхности, их можно рассматривать как «пару» отражающих поверхностей для последовательного направления расходящегося луча в разные части поля обзора, такие как верхняя и нижняя части поля обзора. В других вариантах осуществления могут быть предусмотрены три смежные отражающие поверхности, которые можно рассматривать как «триплет», каждая из которых направляет расходящийся луч в разные части поля обзора. Таким образом может быть достигнуто быстрое переключение между различными частями поля обзора.
ПУНКТЫ
Пункт 1. Сканер для лидарной системы автономного транспортного средства, причем сканер содержит: компонент ступицы, содержащий корпус ступицы, который выполнен с возможностью вращения вокруг оси вращения ступицы; по меньшей мере три зеркальных компонента, подвижно соединенных с компонентом ступицы, причем каждый зеркальный компонент имеет: переднюю сторону, имеющую отражающую поверхность для направления падающих световых лучей; и заднюю сторону, имеющую соединитель для прикрепления упомянутых по меньшей мере трех зеркальных компонентов к компоненту ступицы с соответствующими отражающими поверхностями, обращенными наружу, причем соединитель выполнен с возможностью допускать вращение зеркального компонента вместе с компонентом ступицы и допускать наклон зеркального компонента вдоль ось наклона зеркала, которая является поперечной к оси вращения ступицы.
Пункт 2. Сканер по п. 1, в котором компонент ступицы и по меньшей мере три зеркальных компонента образуют многогранную конфигурацию с по меньшей мере тремя зеркальными компонентами, образующими по меньшей мере три стороны многогранника.
Пункт 3. Сканер по п. 1 или 2, в котором заданные отражающие поверхности по меньшей мере трех зеркальных компонентов имеют конфигурацию расположения бок о бок при присоединении к компоненту ступицы и расположены под углом друг к другу.
Пункт 4. Сканер по любому из пп. 1-3, в котором по меньшей мере три зеркальных компонента расположены по окружности относительно компонента ступицы вокруг оси вращения ступицы.
Пункт 5. Сканер по любому из пп. 1-4, в котором соответствующие оси наклона зеркала множества зеркальных компонентов расположены по окружности компонента ступицы и лежат в одной плоскости.
Пункт 6. Сканер по любому из пп. 1-5, в котором соединитель каждого зеркала образует часть шарнирного соединения.
Пункт 7. Сканер по любому из пп. 1-6, в котором по меньшей мере три зеркальных компонента содержат 3, 4, 5, 6, 7 или 8 зеркальных компонентов.
Пункт 8. Сканер по любому из пп. 1-7, в котором по меньшей мере три зеркальных компонента содержат шесть зеркальных компонентов, расположенных по окружности вокруг компонента ступицы, чтобы образовать конфигурацию шестиугольной призмы, имеющей шесть сторон, с отражающими поверхностями шести зеркальных компонентов, образующими шесть сторон шестиугольной призмы.
Пункт 9. Сканер по любому из пп. 1-8, в котором перемещение зеркального компонента вокруг оси наклона зеркала определяет диапазон углов наклона, содержащий верхний угол наклона относительно опорной плоскости и нижний угол наклона относительно опорной плоскости, и при этом диапазон углов наклона каждого зеркального компонента может быть одинаковым или отличаться друг от друга.
Пункт 10. Сканер по любому из пп. 1-9, дополнительно содержащий привод вертикального перемещения для изменения угла наклона вокруг оси наклона зеркала каждого зеркального компонента из по меньшей мере трех зеркальных компонентов, при этом привод вертикального перемещения выполнен с возможностью изменения угла наклона каждого зеркального компонента.
Пункт 11. Сканер по п. 10, в котором привод вертикального перемещения содержит базовый компонент, имеющий радиус, который изменяется по длине, расположенный по окружности вокруг основания компонента ступицы, причем базовый компонент выполнен с возможностью возвратно-поступательного движения параллельно оси вращения ступицы при нахождении в контакте с задней стороной каждого из по меньшей мере трех зеркальных компонентов для перемещения по меньшей мере трех зеркальных компонентов вокруг их соответствующей оси наклона зеркала, когда базовый компонент совершает возвратно-поступательное движение.
Пункт 12. Сканер по п. 11, дополнительно содержащий ролик, обеспеченный на задней стороне каждого из по меньшей мере трех зеркальных компонентов, причем ролик выполнен с возможностью вращения вокруг оси вращения ролика и вдоль поверхности базового компонента, когда компонент ступицы вращается.
Пункт 14. Сканер по любому из пп. 11-13, в котором базовый компонент имеет форму конуса и его диаметр на нижнем конце шире, чем диаметр на верхнем конце, так что перемещение базового компонента вверх вызывает увеличение угла наклона зеркального компонента относительно опорной плоскости.
Пункт 15. Сканер по любому из пп. 1-14, в котором компонент ступицы связан с возможностью осуществления связи с контроллером лидарной системы, причем контроллер выполнен с возможностью управления вращением компонента ступицы.
Пункт 16. Сканер по любому из пп. 10-15, в котором привод вертикального перемещения связан с возможностью осуществления связи с контроллером лидарной системы, причем контроллер выполнен с возможностью управления перемещением привода вертикального перемещения, которое может вызвать наклон зеркального компонента относительно оси наклона зеркала.
Пункт 18. Лидарная система для обнаружения объектов в окружающей среде автономного транспортного средства, причем лидарная система, как описано в п. 1.
Пункт 19. Лидарная система по п. 18, дополнительно содержащая контроллер, связанный с возможностью осуществления связи со сканером, причем контроллер выполнен с возможностью вызывать вращение компонента ступицы вокруг оси вращения и/или наклонное движение по меньшей мере трех зеркальных компонентов вокруг соответствующей оси наклона зеркала.
Пункт 20. Лидарная система по п. 18, дополнительно содержащая приемник для приема отраженных выходных лучей из интересующей области.
Пункт 21. Способ формирования шаблона сканирования в интересующей области с помощью сканера лидарной системы автономного транспортного средства, причем способ выполняется контроллером лидарной системы, который связан с возможностью осуществления связи со сканером, причем способ включает в себя: контроллер, вызывающий вращение компонента ступицы вокруг оси вращения ступицы, к которой прикреплены по меньшей мере три зеркальных компонента, причем каждый зеркальный компонент имеет отражающую поверхность, обращенную наружу от компонента ступицы, для позиционирования заданного одного из по меньшей мере трех зеркальных компонентов так, чтобы испускаемый световой луч из лидарной системы падает на заданный один зеркальный компонент для передачи горизонтального расходящегося луча; и контроллер, вызывающий наклон заданного одного зеркального компонента относительно компонента ступицы на заранее определенный первый диапазон углов наклона для передачи первого вертикального расходящегося луча.
Пункт 22. Способ по п. 21, в котором контроллер дополнительно включает в себя обеспечение дополнительного вращения компонента ступицы вокруг оси вращения ступицы для позиционирования заданного другого одного из по меньшей мере трех зеркальных компонентов так, чтобы другой испускаемый световой луч из лидарной системы падал на заданный другой один из по меньшей мере трех зеркальных компонентов.
Пункт 23. Способ по п. 22, в котором контроллер дополнительно включает в себя обеспечение наклона заданного другого одного зеркального компонента относительно компонента ступицы на предварительно заданный второй угол наклона для передачи второго вертикального расходящегося луча, причем предварительно заданный первый угол наклона и предварительно заданный второй угол наклона могут быть одинаковыми или разными.
Пункт 24. Способ по п. 22, дополнительно содержащий контроллер, координирующий испускание светового луча с вращением компонента ступицы так, чтобы последовательные световые лучи падали на разные зеркальные компоненты.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ | 2020 |
|
RU2789827C2 |
| Лидарные системы и способы | 2020 |
|
RU2798364C2 |
| Лидарные системы и способы | 2020 |
|
RU2798363C2 |
| ЛИДАРНАЯ СИСТЕМА И СПОСОБ КАЛИБРОВКИ ЛИДАРНОЙ СИСТЕМЫ | 2021 |
|
RU2829904C1 |
| ЛИДАРНАЯ СИСТЕМА И СПОСОБ КАЛИБРОВКИ ЛИДАРНОЙ СИСТЕМЫ | 2021 |
|
RU2829088C1 |
| Лидарная система и способ с когерентным детектированием | 2020 |
|
RU2792949C2 |
| ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ С ВЫБОРОЧНЫМ СКАНИРОВАНИЕМ | 2020 |
|
RU2792951C2 |
| МУЛЬТИСПЕКТРАЛЬНЫЕ ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ | 2020 |
|
RU2792948C2 |
| ЛИДАРНЫЕ (LIDAR) СПОСОБЫ И СИСТЕМЫ СО СКАНИРОВАНИЕМ С ИЗБИРАТЕЛЬНОЙ ПЛОТНОСТЬЮ НА ОСНОВЕ MEMS | 2019 |
|
RU2752016C2 |
| СПОСОБЫ И СИСТЕМЫ ОБНАРУЖЕНИЯ ЛИДАРОВ | 2020 |
|
RU2775823C2 |
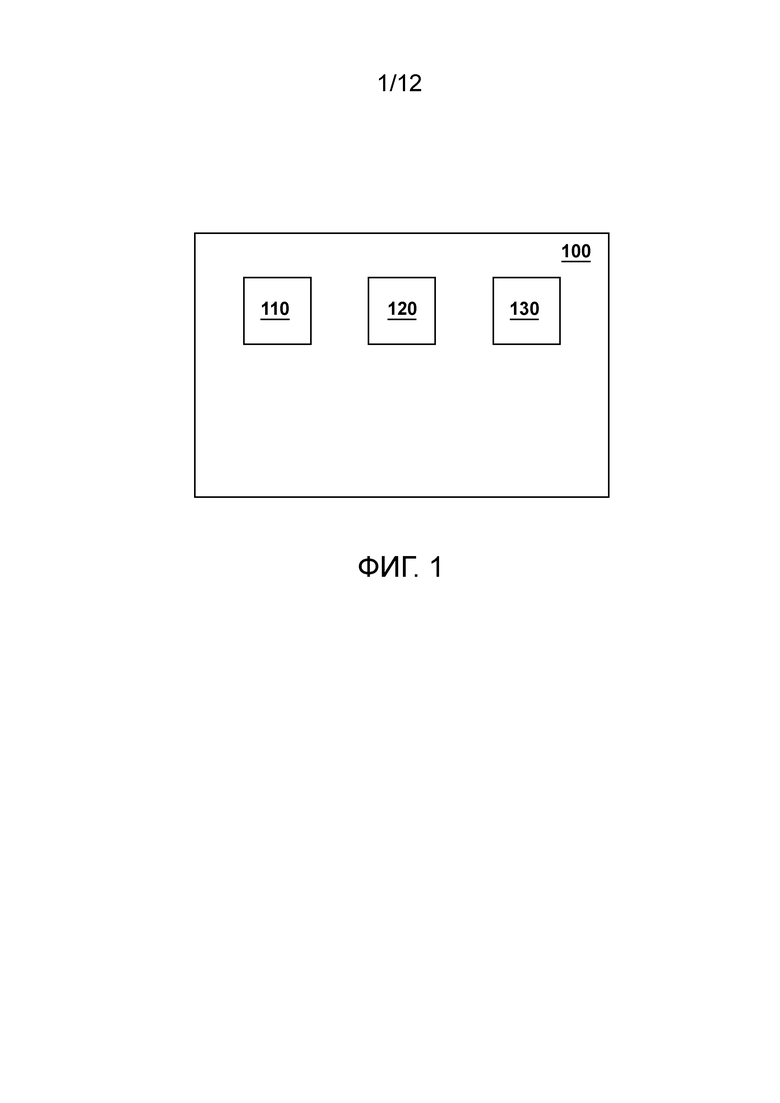
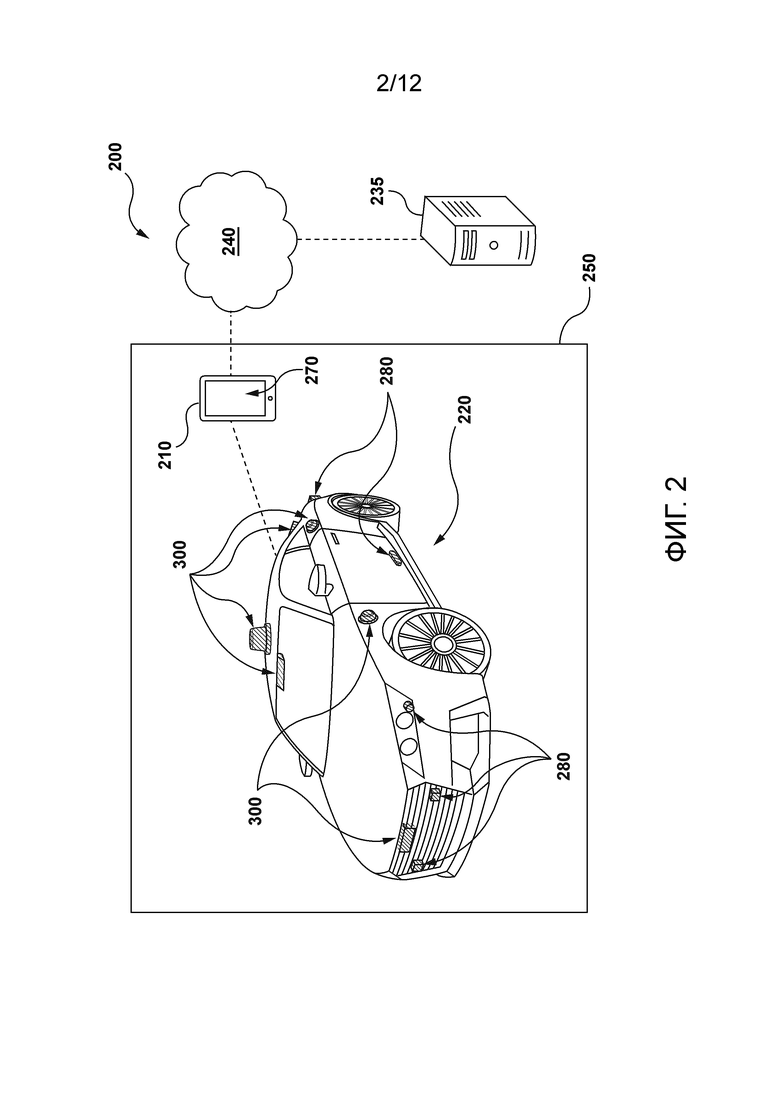

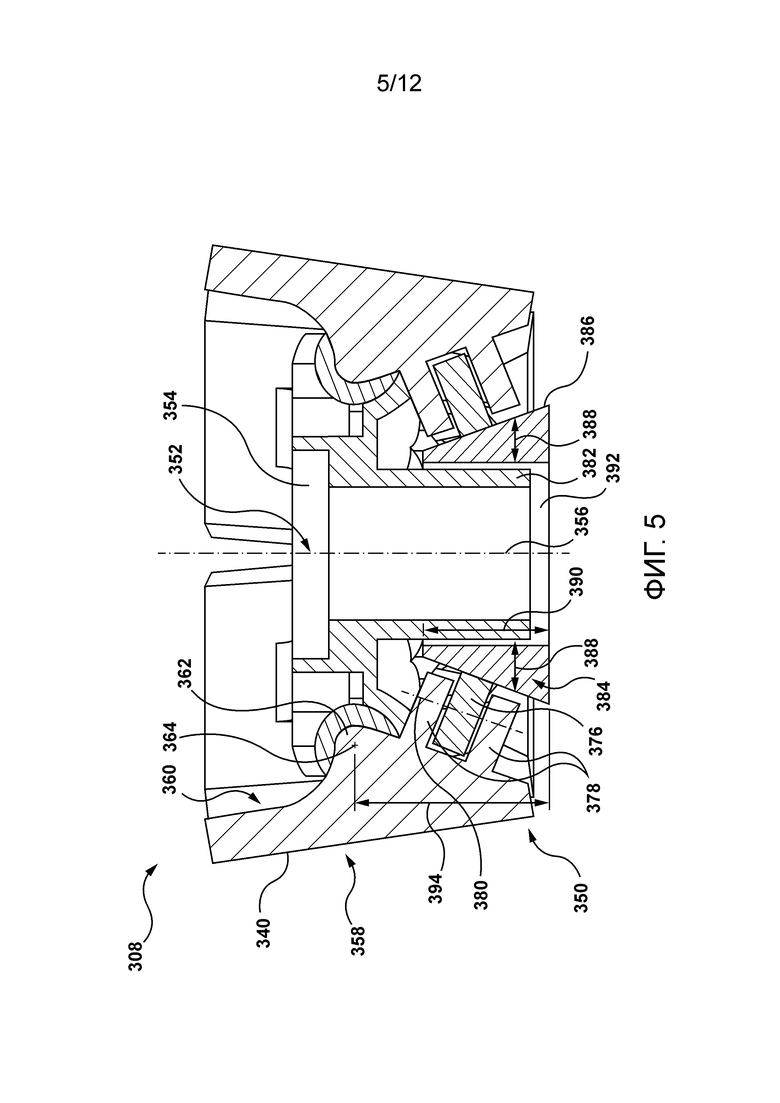
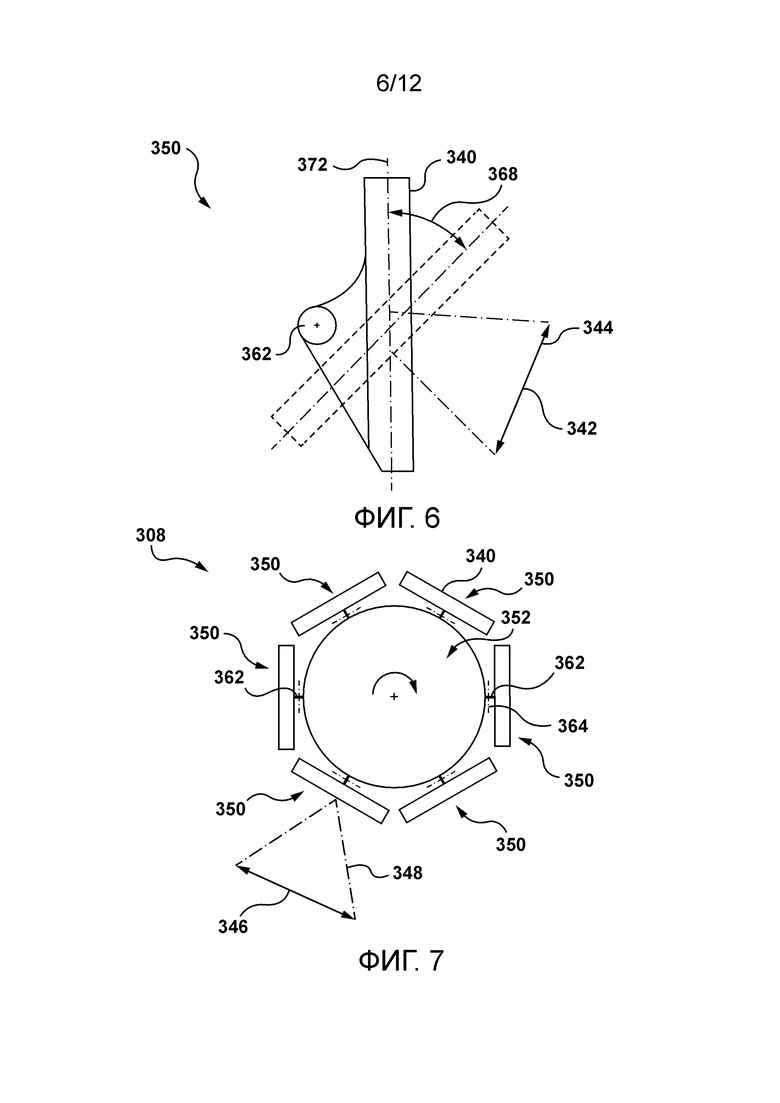
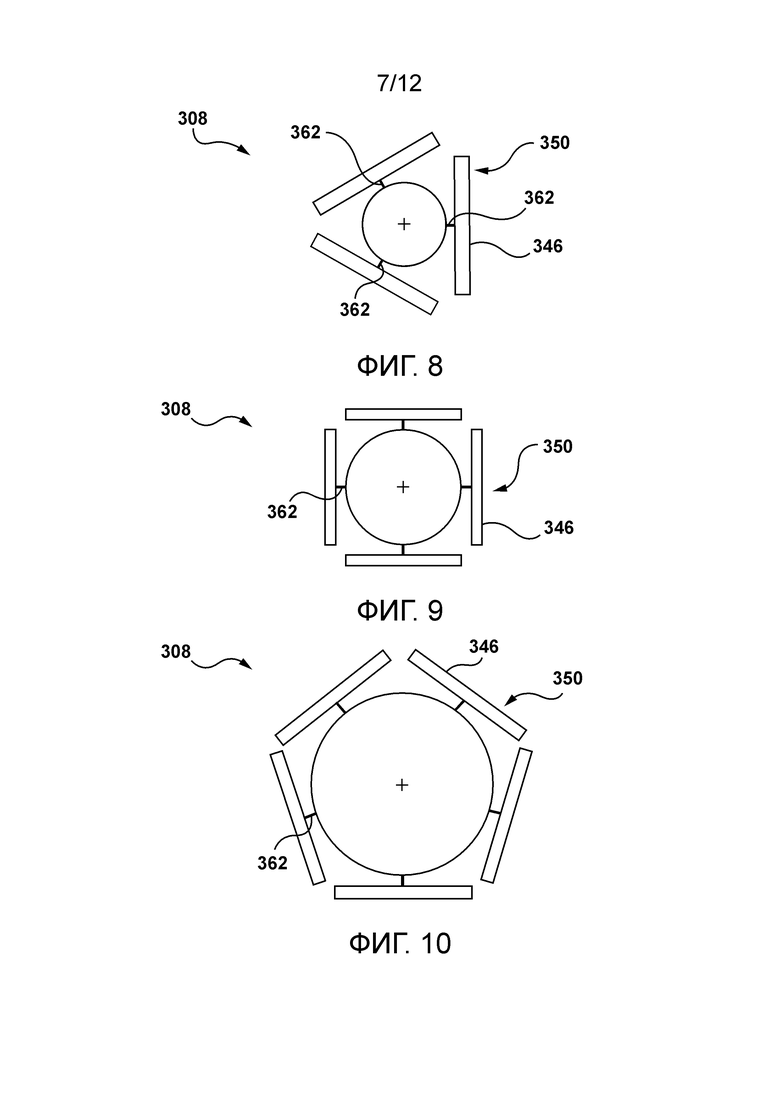





Использование: настоящая технология в целом относится к системам обнаружения и определения дальности с помощью света (LiDAR, лидар) и к способам для обнаружения объектов в окружающей среде автономного транспортного средства; и, в частности, к системам лидара и способам для обнаружения объектов в желаемой области интереса в окружающей среде. Сущность: сканер для лидарной системы автономного транспортного средства, причем сканер содержит: компонент ступицы, содержащий корпус ступицы, который вращается вокруг оси вращения ступицы; по меньшей мере три зеркальных компонента, подвижно соединенных с компонентом ступицы, каждый зеркальный компонент имеет: переднюю сторону, имеющую отражающую поверхность для направления падающих световых лучей; и заднюю сторону, имеющую соединитель для прикрепления по меньшей мере трех зеркальных компонентов к компоненту ступицы с соответствующими отражающими поверхностями, обращенными наружу, причем соединитель выполнен с возможностью допускать вращение зеркального компонента вместе с компонентом ступицы и допускать наклон зеркального компонента вокруг оси наклона зеркала, которая является поперечной к оси вращения ступицы. Технический результат: повышение надежности, а также качества определения местоположения и навигации беспилотного транспортного средства, повышение безопасности вождения за счет получения более точной информации об окружающих предметах. 4 н. и 21 з.п. ф-лы, 16 ил.
1. Сканер для лидарной системы автономного транспортного средства, причем сканер содержит:
компонент ступицы, содержащий корпус ступицы, который выполнен с возможностью вращения вокруг оси вращения ступицы;
по меньшей мере три зеркальных компонента, подвижно соединенных с компонентом ступицы, причем каждый зеркальный компонент имеет:
переднюю сторону, имеющую отражающую поверхность для направления падающих световых лучей; и
заднюю сторону, имеющую соединитель для прикрепления упомянутых по меньшей мере трех зеркальных компонентов к компоненту ступицы с соответствующими отражающими поверхностями, обращенными наружу, причем соединитель выполнен с возможностью допускать вращение зеркального компонента вместе с компонентом ступицы и допускать наклон зеркального компонента вокруг оси наклона зеркала, которая является поперечной к оси вращения ступицы.
2. Сканер по п. 1, в котором компонент ступицы и по меньшей мере три зеркальных компонента образуют многогранную конфигурацию с по меньшей мере тремя зеркальными компонентами, образующими по меньшей мере три стороны многогранника.
3. Сканер по п. 1, в котором заданные отражающие поверхности по меньшей мере трех зеркальных компонентов имеют конфигурацию расположения бок о бок при присоединении к компоненту ступицы и расположены под углом друг к другу.
4. Сканер по п. 1, в котором по меньшей мере три зеркальных компонента расположены по окружности относительно компонента ступицы вокруг оси вращения ступицы.
5. Сканер по п. 1, в котором соответствующие оси наклона зеркала множества зеркальных компонентов расположены по окружности компонента ступицы и лежат в одной плоскости.
6. Сканер по п. 1, в котором соединитель каждого зеркального компонента образует часть шарнирного соединения.
7. Сканер по п. 1, в котором по меньшей мере три зеркальных компонента содержат 3, 4, 5, 6, 7 или 8 зеркальных компонентов.
8. Сканер по п. 1, в котором по меньшей мере три зеркальных компонента содержат шесть зеркальных компонентов, расположенных по окружности вокруг компонента ступицы с образованием конфигурации шестиугольной призмы, имеющей шесть сторон, причем отражающие поверхности шести зеркальных компонентов образуют шесть сторон шестиугольной призмы.
9. Сканер по п. 1, в котором перемещение зеркального компонента вокруг оси наклона зеркала определяет диапазон углов наклона, содержащий верхний угол наклона относительно опорной плоскости и нижний угол наклона относительно опорной плоскости, и в котором диапазон углов наклона каждого зеркального компонента может быть одинаковым или отличаться друг от друга.
10. Сканер по п. 1, дополнительно содержащий привод вертикального перемещения для изменения угла наклона вокруг оси наклона зеркала каждого зеркала из по меньшей мере трех зеркальных компонентов, при этом привод вертикального перемещения выполнен с возможностью изменения угла наклона каждого зеркала.
11. Сканер по п. 10, в котором привод вертикального перемещения содержит базовый компонент, имеющий радиус, который изменяется по его длине, расположенный по окружности вокруг основания компонента ступицы, причем базовый компонент выполнен с возможностью возвратно-поступательного движения параллельно оси вращения ступицы при нахождении в контакте с задней стороной каждого из по меньшей мере трех зеркальных компонентов для перемещения по меньшей мере трех зеркальных компонентов вокруг их соответствующих осей наклона зеркала, когда базовый компонент совершает возвратно-поступательное движение.
12. Сканер по п. 11, дополнительно содержащий ролик, обеспеченный на задней стороне каждого из по меньшей мере трех зеркальных компонентов, причем ролик выполнен с возможностью вращения вокруг оси вращения ролика и вдоль поверхности базового компонента, когда компонент ступицы вращается.
13. Сканер по п. 12, в котором ось вращения ролика параллельна поверхности базового компонента.
14. Сканер по п. 11, в котором базовый компонент имеет форму конуса и его диаметр на нижнем конце шире, чем диаметр на верхнем конце, так что перемещение базового компонента вверх вызывает увеличение угла наклона зеркального компонента относительно опорной плоскости.
15. Сканер по п. 1, в котором компонент ступицы соединен с возможностью осуществления связи с контроллером лидарной системы, причем контроллер выполнен с возможностью управления вращением компонента ступицы.
16. Сканер по п. 10, в котором привод вертикального перемещения соединен с возможностью осуществления связи с контроллером лидарной системы, причем контроллер выполнен с возможностью управления перемещением привода вертикального перемещения, которое может вызвать наклон зеркального компонента вокруг оси наклона зеркала.
17. Сканер по п. 11, в котором базовый компонент соединен с возможностью осуществления связи с контроллером лидарной системы, причем контроллер выполнен с возможностью управления возвратно-поступательным движением привода вертикального перемещения, которое может вызвать наклон зеркального компонента вокруг оси наклона зеркала.
18. Лидарная система для обнаружения объектов в окружающей среде автономного транспортного средства, причем лидарная система содержит:
компонент ступицы, содержащий корпус ступицы, который выполнен с возможностью вращения вокруг оси вращения ступицы;
по меньшей мере три зеркальных компонента, подвижно соединенных с компонентом ступицы, причем каждый зеркальный компонент имеет:
переднюю сторону, имеющую отражающую поверхность для направления падающих световых лучей; и
заднюю сторону, имеющую соединитель для прикрепления по меньшей мере трех зеркальных компонентов к компоненту ступицы с соответствующими отражающими поверхностями, обращенными наружу, причем соединитель выполнен с возможностью допускать вращение зеркального компонента вместе с компонентом ступицы и допускать наклон зеркального компонента вокруг оси наклона зеркала, которая является поперечной к оси вращения ступицы.
19. Лидарная система по п. 18, дополнительно содержащая контроллер, связанный с возможностью осуществления связи со сканером, причем контроллер выполнен с возможностью вызывать вращение компонента ступицы вокруг оси вращения и/или наклонное движение по меньшей мере трех зеркальных компонентов вокруг соответствующей оси наклона зеркала.
20. Лидарная система по п. 18, дополнительно содержащая приемник для приема отраженных выходных лучей из интересующей области.
21. Способ формирования шаблона сканирования в интересующей области сканером лидарной системы автономного транспортного средства,
причем сканер содержит компонент ступицы и по меньшей мере три зеркальных компонента, подвижно соединенных с компонентом ступицы соединителем, выполненным с возможностью допускать вращение зеркального компонента вместе с компонентом ступицы и допускать наклон зеркального компонента вокруг оси наклона зеркала, которая является поперечной к оси вращения ступицы,
при этом способ выполняется контроллером лидарной системы, который соединен с возможностью осуществления связи со сканером, способ включает в себя:
контроллер, вызывающий вращение компонента ступицы вокруг оси вращения ступицы, к которому прикреплены по меньшей мере три зеркальных компонента, причем каждый зеркальный компонент имеет отражающую поверхность, обращенную наружу от компонента ступицы, для позиционирования заданного одного из по меньшей мере трех зеркальных компонентов так, что испускаемый световой луч из лидарной системы падает на заданный один зеркальный компонент для передачи горизонтального расходящегося луча;
контроллер, вызывающий наклон заданного зеркального компонента относительно компонента ступицы на заранее определенный первый угол наклона для передачи первого вертикального расходящегося луча.
22. Способ по п. 21, причем контроллер дополнительно включает в себя обеспечение дополнительного вращения компонента ступицы вокруг оси вращения ступицы для позиционирования заданного другого одного из по меньшей мере трех зеркальных компонентов так, чтобы другой испускаемый световой луч из лидарной системы падал на заданный другой один из по меньшей мере трех зеркальных компонентов.
23. Способ по п. 22, причем контроллер дополнительно включает в себя обеспечение наклона заданного другого одного зеркального компонента относительно узла ступицы на предварительно заданный второй угол наклона для передачи второго вертикального расходящегося луча, при этом предварительно заданный первый угол наклона и предварительно заданный второй угол наклона могут быть одинаковыми или разными.
24. Способ по п. 22, дополнительно содержащий контроллер, координирующий испускание светового луча с вращением компонента ступицы так, чтобы последовательные световые лучи падали на разные зеркальные компоненты.
25. Сканер для лидарной системы автономного транспортного средства, содержащий:
отражающие поверхности, расположенные по окружности вокруг вращающегося компонента ступицы и вращающиеся вместе с компонентом ступицы;
причем каждая отражающая поверхность выполнена с возможностью наклона вокруг оси наклона зеркала, которая является поперечной к оси вращения ступицы;
привод вертикального перемещения, выполненный с возможностью заставлять отражающую поверхность наклоняться.
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |
| US 2019195992 A1, 27.06.2019 | |||
| Способ восстановления спиралей из вольфрамовой проволоки для электрических ламп накаливания, наполненных газом | 1924 |
|
SU2020A1 |
| US 5793491 A, 11.09.1998. | |||

