Изобретение относится к устройству управления канатной транспортной установкой, в частности, в городской или пригородной среде.
Такая установка обычно содержит две конечные станции, между которыми протянуты один или более канатов, обеспечивающих по меньшей мере тягу пассажирских транспортных средств. Между этими конечными станциями вдоль канатной трассы могут быть добавлены дополнительные станции. Это очень часто случается в городской или пригородной среде.
Важно иметь возможность регулировать поток пассажиров, которые садятся в транспортные средства и выходят из них. Речь идет не только об обеспечении работы установки в соответствии с ее размерными характеристиками, но и об ее эффективной эксплуатации. Кроме того, следует заботиться о комфорте пассажиров. Наконец, следует учитывать максимальную нагрузку в каждом транспортном средстве.
Особенность канатных транспортных установок типа, упомянутого во вводной части, заключается в том, что движение совокупности транспортных средств происходит по замкнутому пути или пути челночного типа, по меньшей мере между конечными станциями. Следует соблюдать определенное распределение транспортных средств на линии или темп относительно времени, в частности, чтобы избежать столкновений между транспортными средствами. Для соблюдения этого темпа посадка и высадка на станции обычно производятся в установленный период времени. Иными словами, любое транспортное средство на линии имеет одинаковый интервал времени на станции, в течение которого на транспортном средстве может выполняться посадка и высадка пассажиров.
Установка обычно оснащена устройством управления, содержащим по меньшей мере один контроллер, способный организовать период посадки для транспортных средств на станции. Этот период посадки заканчивается запретом доступа к транспортному средству.
В достаточно простых установках, в частности в горах, станция оборудована платформой, по меньшей мере один участок которой оборудован для высадки и посадки пассажиров. По мере приближения к этому участку двери транспортного средства открываются, обычно за счет механического действия кулачка, что означает начало периода посадки/высадки. По мере удаления от этого участка двери транспортного средства закрываются, также за счет механического действия кулачка, что означает окончание периода посадки/высадки. Посадка и высадка происходят при движении транспортного средства с пониженной скоростью вдоль участка платформы. Период посадки/высадки соответствует времени, необходимому транспортному средству, чтобы пройти участок платформы.
В других установках период посадки и высадки может включать остановку транспортного средства на станции и открывание, а затем закрывание дверей. При необходимости в этот период могут подаваться звуковые и/или световые предупредительные сигналы.
Обычно регулирование потока пассажиров в канатных транспортных установках обеспечивается операторами. Роль последних состоит в том, чтобы запретить доступ к транспортному средству, когда оно заполнено, или пригласить пользователей на посадку, чтобы заполнить транспортное средство. Чаще всего операторы действуют на основании общего визуального контроля.
Такой способ регулирования потока пассажиров несовместим с транспортными средствами большой вместимости или при увеличении притока пассажиров. Фактически, в этих двух случаях операторы, как правило, не могут достаточно точно оценить загруженность транспортного средства, чтобы эффективно регулировать поток пассажиров. Задача этих операторов еще более усложняется на промежуточной станции: там операторы должны подсчитывать пассажиров, которые высаживаются, или тех, кто остается в транспортном средстве, чтобы регулировать поток пассажиров на посадку.
Прежде всего, этот тип регулирования требует наличия количества операторов, которое тем больше, чем больше продолжительность работы или чем больше транспортных средств и/или станций. В некоторых случаях этот тип регулирования слишком дорогостоящий, чтобы его можно было рассматривать, в частности, когда установка расположена в городской или пригородной среде.
Для преодоления этой трудности, из документа EP 3009993 известна, в частности, организация посадочной платформы с одним или более шлюзами, каждый из которых обеспечивает доступ к соответствующему транспортному средству. Доступ пассажиров к шлюзу контролируется, например, посредством турникета, так что пропускная способность каждого шлюза может быть адаптирована к вместимости транспортного средства. Эти шлюзы позволяют точно подсчитать пассажиров, которые собираются сесть в транспортное средство, до того, как последние войдут в рассматриваемое транспортное средство.
Такая установка оказывается эффективной, особенно в том случае, если транспортные средства прибывают на посадочную платформу пустыми. На промежуточной станции предусмотреть такую установку может быть сложно. Кроме того, рассматриваемые шлюзы занимают значительное место на платформе. Наконец, эти шлюзы обычно плохо воспринимаются пассажирами, поскольку они вызывают у них чувство дискомфорта.
Из документа FR 2953476 известна также подвесная канатная транспортная установка, в которой пассажиры указывают на входе на каждую станцию свой пункт назначения с помощью устройства обязательной регистрации. Программист централизует эти показания с установкой в сборе и определяет для каждого транспортного средства, прибывающего на станцию, количество мест, доступных для посадки. На каждой посадочной платформе установлен шлюз доступа, к которому могут получить доступ пассажиры только в количестве, соответствующем имеющимся местам.
Эта установка очень чувствительна к возможным ошибкам при вводе пунктов назначения. Установка не содержит каких-либо устройств дублирования, позволяющих исправить возможные отклонения от фактического. Кроме того, при определении количества доступных мест не учитывается объем, фактически занимаемый пассажирами в транспортном средстве, а также общий вес этих пассажиров.
Изобретение ставит перед собой цель улучшить ситуацию.
Предлагается устройство управления канатной транспортной установкой типа, содержащего по меньшей мере один контроллер, способный организовать период посадки номинальной продолжительности для транспортных средств на станции, причем этот период посадки заканчивается запретом доступа к транспортному средству. Контроллер содержит вход для приема по меньшей мере одной величины, представляющей загруженность транспортного средства. Контроллер выполнен с возможностью реагирования на прием такой величины во время периода посадки со сравнением ее с пороговым значением и инициированием запрета доступа к транспортному средству заранее, до окончания периода посадки, в зависимости от результата сравнения между указанной величиной и пороговым значением.
Предлагаемое устройство позволяет просто и эффективно регулировать поток пассажиров для посадки/высадки в транспортных средствах установки без изменения посадочной платформы и с повышением комфорта пассажиров.
В зависимости от результата сравнения между величиной, представляющей загруженность транспортного средства, и пороговым значением, например, когда эта величина включает значение загруженности, превышающее пороговое значение, запрет доступа может быть инициирован заранее, во время периода посадки. Это приводит к прерыванию посадки пассажиров до окончания периода посадки. Количество пассажиров в транспортном средстве регулируется. Пока рассматриваемое значение загруженности остается ниже порогового значения, пассажиры могут совершать посадку до конца периода посадки. Период посадки определяется порядком движения транспортных средств на линии. В период посадки может учитываться номинальный простой, связанный с порядком движения транспортных средств на линии, при этом доступ к транспортному средству заранее запрещается.
Предпочтительно период посадки происходит в соответствии с первым простоем, и, когда контроллер инициирует запрет доступа с опережением первого простоя, автомат организует задержку простоя определенной продолжительности после этого запрета доступа, при этом продолжительность задержки простоя определяется в зависимости от этого опережения. При необходимости может быть предусмотрено, чтобы продолжительность задержки простоя соответствовала указанному опережению, из которого при необходимости вычисляют отсрочку в выполнении последовательности запрета доступа.
На практике необходимо, чтобы в конце задержки простоя автомат проверял выполнение условия отправления и предпочтительно генерировал порядок отправления.
Пороговое значение может быть меньше максимального значения вместимости транспортного средства, чтобы обеспечить комфорт пассажиров.
Запрет доступа к транспортному средству, если он инициирован заранее, может быть похож на запрет, инициируемый в конце периода посадки.
Таким образом, пассажиры не ощущают никаких ограничений, что позволяет избежать любых опасений, связанных с возможной перегрузкой транспортного средства, а также неудобствами, связанными с физическим подсчетом или особым устройством платформы.
Кроме того, предлагается канатная транспортная установка типа, содержащего транспортные средства и по меньшей мере одну станцию, при этом установка дополнительно содержит контроллер, способный организовать период посадки в течение номинальной продолжительности для транспортных средств на указанной станции. Этот период посадки заканчивается запретом доступа к транспортному средству. Контроллер содержит вход для приема по меньшей мере одной величины, представляющей загруженность транспортного средства. Контроллер выполнен с возможностью реагирования на прием такой величины во время периода посадки со сравнением ее с пороговым значением и инициированием запрета доступа к транспортному средству заранее, до окончания периода посадки, в зависимости от результата сравнения между указанной величиной и пороговым значением.
Также предлагается способ управления канатной транспортной установкой, в которой организован период посадки номинальной продолжительности для транспортных средств на станции, причем этот период посадки заканчивается запретом доступа к транспортному средству. Способ включает следующие этапы:
- прием по меньшей мере одной величины, представляющей загруженность транспортного средства;
- реагирование на прием такой величины во время периода посадки со сравнением ее с пороговым значением и инициированием запрета доступа к транспортному средству заранее, до окончания периода посадки, в зависимости от результата сравнения между указанной величиной и пороговым значением.
Также предлагается устройство управления транспортной установкой типа, содержащего по меньшей мере один контроллер, способный организовать период посадки для по меньшей мере одного транспортного средства на станции в заданный момент до отправления транспортного средства, причем этот период посадки заканчивается запретом доступа к транспортному средству и последующим отправлением транспортного средства в указанный заданный момент. Контроллер содержит вход для приема по меньшей мере одной величины, представляющей загруженность транспортного средства, и выполнен с возможностью реагирования на прием указанной величины во время периода посадки со сравнением ее с пороговым значением и инициированием запрета доступа к транспортному средству заранее, до окончания периода посадки, в зависимости от результата сравнения между указанной величиной и пороговым значением.
Наконец, предлагается способ управления транспортной установкой, в которой организован период посадки для по меньшей мере одного транспортного средства на станции в заданный момент до отправления транспортного средства, причем этот период посадки заканчивается запретом доступа к транспортному средству и последующим отправлением транспортного средства в указанный заданный момент. На практике осуществляется прием по меньшей мере одной величины, представляющей загруженность транспортного средства, и реагирование на прием указанной величины во время периода посадки со сравнением ее с пороговым значением и инициированием запрета доступа к транспортному средству заранее, до окончания периода посадки, в зависимости от результата сравнения между указанной величиной и пороговым значением.
Другие характеристики и преимущества настоящего изобретения станут очевидными после рассмотрения подробного описания, приведенного ниже, и прилагаемых графических материалов, на которых:
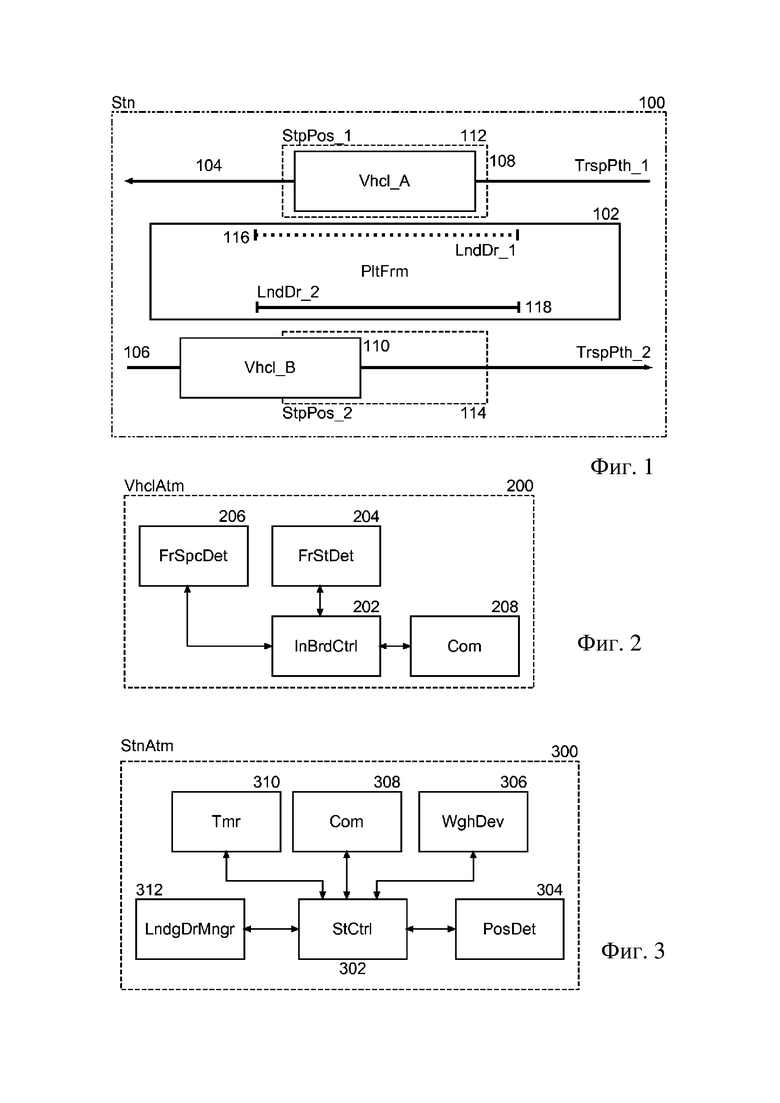
- на фиг. 1 представлена схема, показывающая часть канатной транспортной установки;
- на фиг. 2 представлена функциональная схема системы автоматизации транспортного средства для использования, например, в установке, показанной на фиг. 1;
- на фиг. 3 представлена функциональная схема системы автоматизации станции для использования, например, в установке, показанной на фиг. 1;
- на фиг. 4 представлена блок-схема, показывающая работу устройства управления для использования, например, в установке, показанной на фиг. 1;
- на фиг. 5 представлена блок-схема, подробно описывающая этап 411 на фиг. 4 согласно первому варианту осуществления;
- на фиг. 6 представлена блок-схема, подробно описывающая этап 411 на фиг. 4 согласно второму варианту осуществления;
- на фиг. 7 представлена блок-схема, подробно описывающая этап 411 на фиг. 4 согласно третьему варианту осуществления;
- на фиг. 8 представлена блок-схема, иллюстрирующая развитие этапа 411;
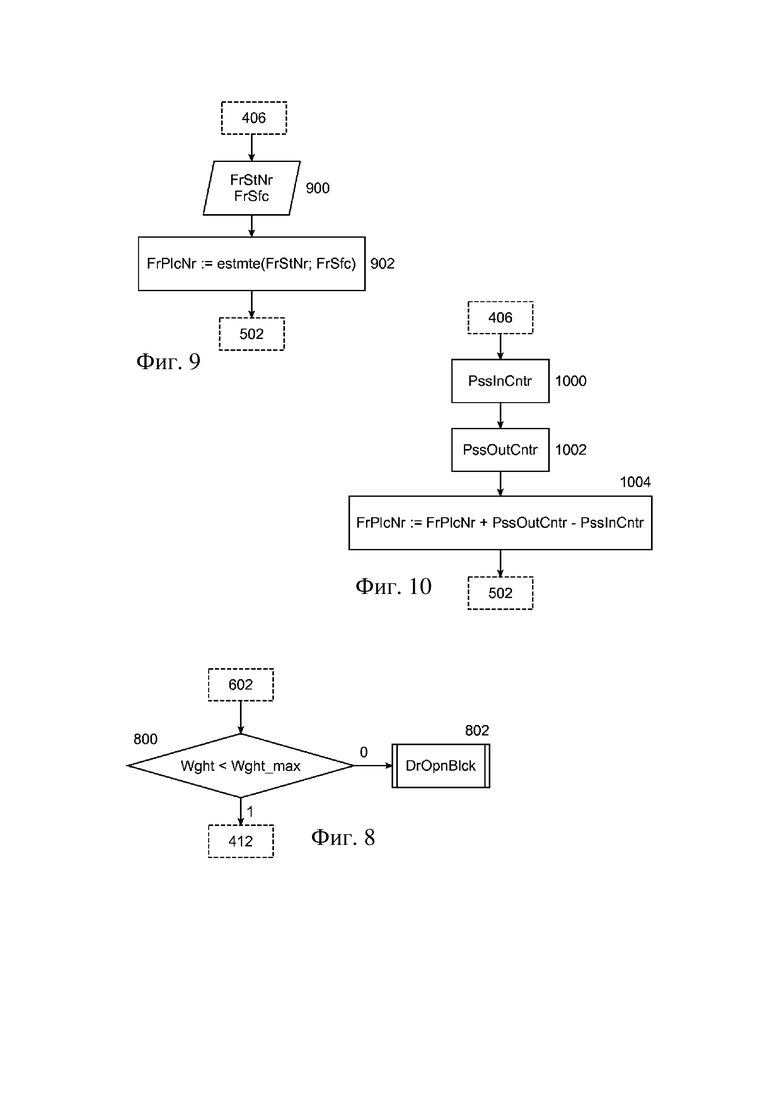
- на фиг. 9 представлена блок-схема, иллюстрирующая другое развитие этапа 411;
- на фиг. 10 представлена блок-схема, иллюстрирующая вариант развития, показанного на фиг. 9;
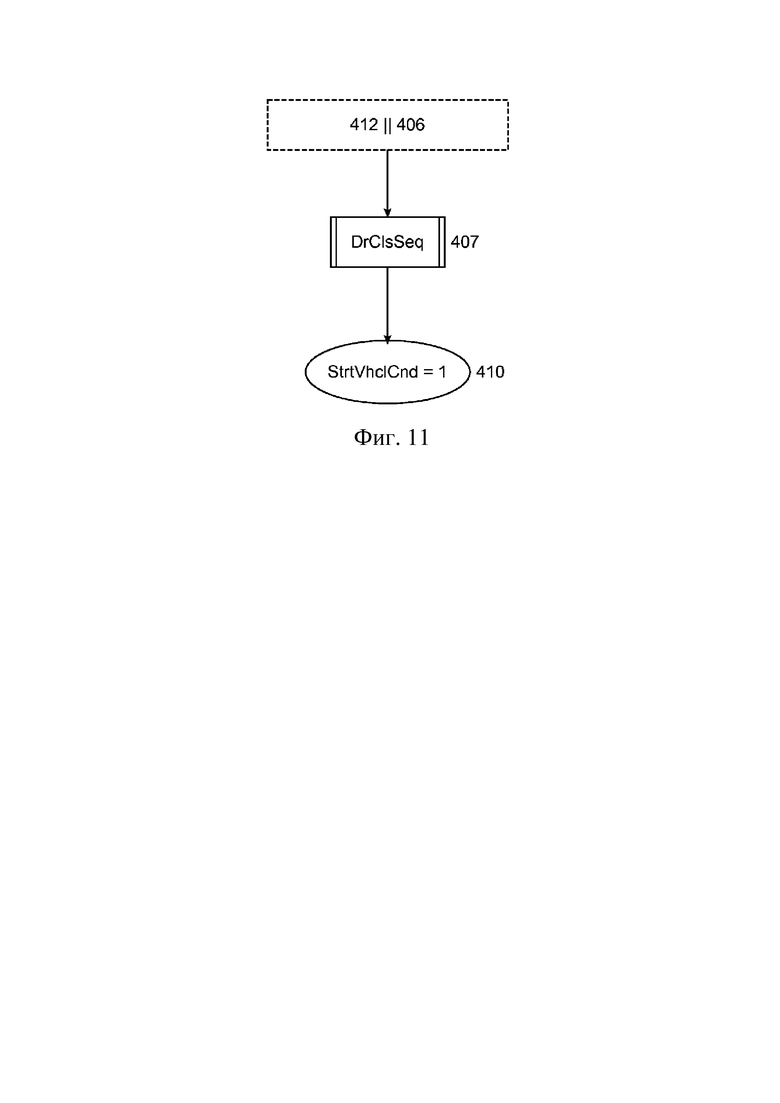
- на фиг. 11 представлена блок-схема, показывающая вариант работы, показанной на фиг. 4.
Прилагаемые графические материалы содержат элементы с определенными ссылочными номерами. Они могут не только служить для дополнения настоящего изобретения, но и способствовать его определению, если это необходимо.
Рассмотрим фиг. 1.
На ней показана установка канатной транспортной системы типа подвесной канатной дороги, фуникулера и т. п. в виде части станции 100.
Станция 100 содержит удлиненную платформу 102, которая проходит вдоль части первого пути 104 транспортировки и второго пути 106 транспортировки системы и расположена между ними. Система содержит транспортные средства, приспособленные для транспортировки пассажиров, в данном случае первое транспортное средство 108 и второе транспортное средство 110. Предполагается, что эти транспортные средства проходят через станцию 100, при этом первое транспортное средство 108 занимает первый путь 104, тогда как второе транспортное средство 110 занимает второй путь 106.
На первом пути 104 и на втором пути 106 движение транспортных средств организовано во взаимно противоположных направлениях. Первое транспортное средство 108 движется справа налево на фиг. 1, в то время как второе транспортное средство 110 движется слева направо на этой фигуре.
На станции 100 один или более участков удлиненной платформы 102 оборудованы как места стоянки для посадки и/или высадки пассажиров в транспортных средствах. Каждое место стоянки соответствует зоне посадки на одно или более транспортных средств и/или высадки с них. Здесь каждое место стоянки соответствует положению остановки транспортного средства на станции 100.
В показанном здесь примере первое место стоянки, соответствующее первому положению 112 остановки, организовано для первого пути 104, а второе место стоянки, соответствующее второму положению 114 остановки, организовано для второго пути 106. Первое транспортное средство 108 показано здесь в первом положении 112 остановки, в то время как второе транспортное средство 110 приближается ко второму положению 114 остановки.
Каждая место стоянки в данном случае содержит устройство платформенной двери, состоящее из одного или более дверных элементов и установленное на платформе 102 напротив соответствующего положения остановки. В примере, показанном на фиг. 1, первое устройство 116 платформенной двери расположено напротив первого положения 112 остановки, в то время как второе устройство 118 платформенной двери находится напротив второго положения 114 остановки.
Каждым устройством платформенной двери можно управлять для переключения между первым состоянием, или открытым состоянием, в котором устройство обеспечивает доступ пассажиров с платформы 102 к транспортному средству, остановленному в соответствующем положении остановки, и вторым состоянием, или закрытым состоянием, в котором устройство запрещает такой доступ.
В показанном здесь примере первое устройство 116 платформенной двери показано в своем открытом состоянии (пунктирная линия), в то время как второе устройство 118 платформенной двери показано в своем закрытом состоянии (сплошная линия).
Рассмотрим фиг. 2.
На ней показан пример системы автоматизации управления для использования в транспортных средствах канатной транспортной установки, например в первом транспортном средстве 108 и втором транспортном средстве 110 на фиг. 1.
Система 200 автоматизации транспортного средства содержит бортовой контроллер 202. Система 200 автоматизации транспортного средства дополнительно содержит модуль обнаружения незанятых мест или модуль 204 LrStDet, подключенный к бортовому контроллеру 202 и способный доставлять в последний значение, представляющее количество свободных мест в кабине транспортного средства. Кабина соответствует подузлу транспортного средства, в котором физически находятся пассажиры. Кабина может быть оборудована сидячими и/или стоячими местами. Один или более входов модуля LrStDet 204 могут быть подключены к выходу одного или более устройств из группы, состоящей из устройств взвешивания, установленных в местах, сухих контактов, расположенных в местах, оптического детектора, устройства видеосъемки, связанного со схемой обработки изображений, и т. п.
Система 200 автоматизации транспортного средства также содержит модуль обнаружения свободной поверхности или модуль LrStDet 206, подключенный к бортовому контроллеру 202 и способный доставлять в последний значение, представляющее незанятую поверхность в кабине. Один или более входов модуля FrSpcDet 206 могут быть подключены к выходу одного или более устройств из группы, состоящей из компоновки оптических отражателей, распределенных на полу кабины, и оптических детекторов, распределенных на потолке этой кабины, устройства видеосъемки, связанного со схемой обработки изображений, напольного коврика с распределенными контактными элементами, напольного коврика емкостного типа и т. п.
Система 200 автоматизации транспортного средства в данном случае также содержит модуль 208 связи, подключенный к бортовому контроллеру 202, посредством которого система 200 автоматизации транспортного средства может сообщаться с другими системами автоматизации, в частности станции.
Рассмотрим фиг. 3.
На ней показан пример системы автоматизации управления для использования в станции канатной транспортной установки, такой как, например, станция 100 на фиг. 1.
Система 300 автоматизации станции содержит станционный контроллер 302. Система 300 автоматизации станции также содержит модуль 304 позиционирования для транспортных средств на станции. В частности, модуль 304 позиционирования способен определять присутствие транспортного средства по меньшей мере в некоторых зонах посадки и/или высадки на станции, при необходимости в положениях остановки на станции. Например, модуль 304 позиционирования способен определять присутствие транспортного средства по меньшей мере в одном из первого положения 112 остановки и второго положения 114 остановки на фиг. 1. Модуль 304 позиционирования, например, подключен к одному или более датчикам, установленным в соответствующем положении остановки.
Система 300 автоматизации станции также содержит модуль 306 нагрузки для транспортных средств на станции. Модуль 306 нагрузки может определять значение веса по меньшей мере для некоторых транспортных средств станции, в частности, когда они находятся в соответствующем положении остановки, например, как первое транспортное средство 108 на фиг. 1. Это значение веса предпочтительно получают путем измерения. Модуль 306 нагрузки, например, подключен к одному или более устройствам типа датчиков нагрузки, установленным на элементе, который направляет транспортные средства вдоль пути на станции, например на рельсах.
Система 300 автоматизации станции также содержит модуль 308 связи, подключенный к станционному контроллеру 302, который позволяет системе 300 автоматизации станции сообщаться с другими системами автоматизации, обычно системами автоматизации транспортных средств, например такими, как описанная в связи с фиг. 2.
Система 300 автоматизации станции также содержит модуль 310 таймера, подключенный к станционному контроллеру 302. Модуль 310 таймера может доставлять в станционный контроллер 302 значения измерения времени.
Система 300 автоматизации станции, наконец, содержит модуль 312 управления для устройств, выборочно запрещающих посадку с места стоянки, в частности доступ пассажиров к транспортному средству, остановленному в соответствующем положении остановки, как правило, это устройства типа первого устройства 116 платформенной двери, описанной со ссылкой на фиг. 1. Модуль 312 управления, в частности, управляет открыванием и закрыванием рассматриваемых устройств. Дополнительно или альтернативно модуль 312 управления может быть сконфигурирован также с возможностью управления открыванием и/или закрыванием дверей транспортного средства, по меньшей мере, когда это транспортное средство находится напротив места стоянки, в частности в соответствующем положении остановки. Это управление может быть непосредственным, направленным на устройство открывания на станции, или опосредованным, обычно через систему автоматизации транспортного средства.
Рассмотрим фиг. 4.
На ней показана работа станционного автомата, такого как система 300 автоматизации станции на фиг. 3, в последовательности, соответствующей остановке транспортного средства в месте стоянки на станции для посадки/высадки пассажиров.
Последовательность начинается с этапа 400, на котором проверяют условие остановки транспортного средства в месте стоянки, или условие StpVhclCnd. Например, условие может относиться к остановке первого транспортного средства 108, показанного на фиг. 1, в первом месте стоянки. Проверка этого условия StpVhclCnd включает, в частности, проверку двойного условия, а именно:
- данных о присутствии транспортного средства в положении остановки, соответствующем месту стоянки, полученных, например, от модуля типа модуля 304 позиционирования на фиг. 3, и
- данных о неподвижности этого транспортного средства относительно платформы, которые могут быть определены путем измерения скорости транспортного средства, полученной, например, от бортового автомата в этом транспортном средстве.
Условие StpVhclCnd может быть проверено, по меньшей мере частично, бортовым автоматом, например системой 200 автоматизации транспортного средства, показанной на фиг. 2. Информация, относящаяся к этой проверке, может быть передана станционному автомату.
На следующем этапе 402 автомат управляет подпоследовательностью, предназначенной для разрешения доступа к транспортному средству пользователей, находящихся на платформе или в процессе посадки, и, наоборот, доступа к платформе для пассажиров из кабины или в процессе высадки. Обычно речь идет о последовательности открывания дверей, или последовательности DrOpnSeq. Эта последовательность DrOpnSeq содержит команду открывания устройств, запрещающих доступ к транспортному средству с платформы, в частности платформенных дверей, например первого устройства 116 платформенных дверей на фиг. 1. Эта последовательность DrOpnSeq может также содержать команду открывания дверей транспортного средства, направляемую непосредственно на устройство открывания на станции или, опосредованно, системе автоматизации транспортного средства.
После завершения последовательности DrOpnSeq автомат начинает измерение периода времени, например, управляя устройством, подобным таймеру 310 на фиг. 3. Начало этого измерения проиллюстрировано здесь инициализацией переменной t, образующей счетчик времени, до значения 0 («ноль») на этапе 404. Это соответствует началу периода посадки/высадки.
На следующем этапе 406 проверяется, является ли период времени, прошедший с начала измерения на этапе 404, большим или равным первому временному параметру Tn_max. На практике таймер 310 может предоставлять в режиме реального времени автомату время, прошедшее с момента получения таймером 310 команды измерения. Это условие иллюстрируется здесь тем, что показатель счетчика времени t больше или равен первому временному параметру Tn_max.
Если это так, то на этапе 407 автомат управляет последовательностью, предназначенной для запрета посадки/высадки. Это окончание периода посадки/высадки.
Обычно речь идет о последовательности закрывания дверей, или последовательности DrClsSeq. Эта последовательность закрывания DrClsSeq обычно содержит команду передачи звукового и/или визуального оповещения, а также последующую команду закрывания платформенных дверей. Дополнительно или альтернативно эта последовательность DrClsSeq может также содержать команду закрывания дверей транспортного средства, направляемую непосредственно на устройство закрывания на станции или, опосредованно, на автомат транспортного средства. Эта последовательность имеет номинальную продолжительность, или продолжительность Tcls_nom, которая является другим временным параметром установки.
Затем автомат сохраняет, в данном случае в переменной TmFrm, значение, соответствующее максимальному из:
- разности между, с одной стороны, суммой первого временного параметра Tn_max и номинальной продолжительности Tclos_nom последовательности закрывания двери и, с другой стороны, значением счетчика времени t;
- нулевого значения.
Когда этап 407 следует за проверкой 406, значение переменной TmFrm, вычисленное на этапе 408, равно нулю.
Когда эта последовательность на этапе 408 завершена, автомат реализует простой, продолжительность которого соответствует значению переменной TmFrm, сохраненной на этапе 408, что соответствует этапу 409. В случае, когда этап 407 следует за этапом 406, этот простой равен нулю. Это случай, когда эта продолжительность на этапе 406, больше или равна первому временному параметру Tn_max.
По окончании простоя на этапе 409 последовательность остановки транспортного средства может завершиться. Транспортное средство готово возобновить движение по меньшей мере в отношении части станционного автомата, который управляет местом стоянки. Это соответствует проверке условия отправления, или условия StrtVhclCnd. Например, порядок отправления передают от станционного автомата на автомат транспортного средства.
Простой, соответствующий первому временному параметру Tn_max, распознается в последовательности проверки на этапе 406 и последовательности на этапе 407. По истечении периода простоя продолжительностью Tn_max от конца последовательности открывания на этапе 402 автомат управляет последовательностью закрывания дверей на этапе 407. И транспортное средство готово к отправлению сразу после этого закрывания, потому что продолжительность дополнительного простоя, предусмотренного на этапе 409, в данном случае равна нулю. Этот период простоя продолжительностью Tn_max соответствует периоду посадки/высадки для транспортных средств на станции в соответствии с номинальным простоем.
Если проверка на этапе 406 дает отрицательный результат, то есть в случае, когда время, прошедшее с момента окончания последовательности открывания на этапе 402, меньше, чем значение первого временного параметра Tn_max, то автомат проверяет условие, относящееся к величине, представляющей загруженность транспортного средства, или условие VhclOccCnd. Величина относится к измерению, выполненному на транспортном средстве. Например, это условие относится к сравнению измерения загруженности с пороговым значением.
Если это условие VhclOccCnd проверено, то автомат проверяет, что период времени, прошедший с момента окончания последовательности открывания на этапе 402, больше, чем второй временной параметр Tn_min. Значение этого второго временного параметра Tn_min меньше, чем значение первого временного параметра Tn_max. Это представлено этапом 412, на котором проверяют, превышает ли показание счетчика времени t значение второго временного параметра Tn_min.
Если это так, то автомат переходит к этапу 407, где он управляет окончанием периода посадки/высадки, а затем к следующему этапу 408. Здесь значение, сохраненное в переменной TmLrm, соответствует разнице между вторым временным параметром Tn_max и продолжительностью времени, прошедшего с конца последовательности открывания на этапе 402. Таким образом, это значение TmLrm соответствует опережению по времени относительно периода простоя, продолжительность которого соответствует первому временному параметру Tn_max, причем из этого опережения при необходимости вычисляют отсрочку в последовательности DrClsSeq относительно номинальной продолжительности Tcls_nom этой последовательности. На этапе 407 автомат инициирует запрет доступа к транспортному средству заранее по отношению к первому временному параметру Tn_max. Это предварительное инициирование является результатом оценки условия VhclOccCnd, относящегося к величине, представляющей загруженность транспортного средства. После этапа 408 на этапе 409 автомат реализует простой, продолжительность которого соответствует значению TmFrm, то есть опережению по отношению к первому временному параметру Tn_max, причем вычисление выполняют из возможной отсрочки в выполнении последовательности DrClsSeq. В конце этого простоя время, прошедшее с момента открывания дверей, в конце последовательности 402, соответствует первому временному параметру Tn_max, к которому добавляют номинальную продолжительность последовательности DrClsSeq. Период посадки/высадки, оказывается соответствующим первому временному параметру Tn_max и последовательности DrClsSeq закрывания на этапе 407. Затем автомат переходит к этапу 410.
Если проверка на этапе 412 дает отрицательный результат, то на следующем этапе 414, выполняют задержку в течение продолжительности dt перед возвратом к проверке на этапе 406. Другими словами, если условие загруженности на этапе 411 проверено, но время, прошедшее с момента окончания последовательности открывания на этапе 402, остается меньше второго временного параметра Tn_min, то автомат выполняет задержку, особенно перед повторной проверкой этого условия загрузки. Продолжительность dt простоя на этапе 414 соответствует приращению времени. Эта продолжительность dt может быть очень короткой или даже незначительной по сравнению со значениями первого временного параметра Tn_max и второго временного параметра Tn_min. Это позволяет последовательности, показанной на фиг. 4, выполняться практически в режиме реального времени.
В случае, когда проверка на этапе 411 дает отрицательный результат, то есть, если условие загруженности транспортного средства не выполняется, автомат возвращается к простою на этапе 414.
Простой, соответствующий второму временному параметру Tn_min, распознается в последовательности проверки на этапе 412 и последовательности на этапе 414. До истечения этого простоя автомат не управляет последовательностью закрывания дверей на этапе 407. Все работает так, чтобы автомат реагировал на оценку условия VhclOccCnd после истечения минимального периода доступа к транспортному средству, начатого в конце этапа 402, и продолжительность которого соответствует второму временному параметру Tn_min.
Второй временной параметр Tn_min соответствует минимальному времени, в течение которого разрешен доступ к транспортному средству для посадки/высадки. Первый временной параметр Tn_max соответствует максимальному времени, в течение которого разрешен доступ к транспортному средству для посадки/высадки.
До истечения простоя, соответствующего первому временному параметру Tn_max, выдается команда на закрывание дверей на этапе 407, как только проверяется условие VhclOccCnd, относящееся к загруженности транспортного средства, при условии, что простой, соответствующий второму временному параметру Tn_min, истек.
Значения первого временного параметра Tn_max и второго временного параметра Tn_min, а также дополнительного параметра Tcls_nom определяют как номинальные продолжительности работы. Значение первого временного параметра Tn_max обычно составляет порядка нескольких десятков секунд, например от 12 до 40 секунд. Значение второго временного параметра Tn_min обычно составляет порядка десятка секунд, например от 5 до 15 секунд. Значение дополнительного временного параметра Tcls_nom обычно составляет порядка нескольких секунд, например от 1 до 3 секунд.
Опережение TmFrm относительно номинальной продолжительности Tn_max открывания дверей, с которым выполняется управление последовательностью закрывания на этапе 407, используется здесь на этапе 409 простоя. Иными словами, условие отправления транспортного средства StrtVhclCnd на этапе 410 проверяется только после истечения простоя, продолжительность которого соответствует первому временному параметру Tn_max, к которому добавляется продолжительность последовательности DrClsSeq, при этом управление последовательностью закрывания дверей на этапе 407 может быть выполнено или не выполнено заранее, то есть до истечения периода, соответствующего первому временному параметру Tn_max.
Соблюдается период посадки/высадки, который можно рассматривать как максимальную продолжительность работы. Таким образом сохраняется номинальный порядок движения транспортных средств вдоль транспортных путей. Время, выигранное относительно этой максимальной продолжительности работы, то есть опережение TmFrm, можно использовать для управления непредвиденными ситуациями в работе. Типичная непредвиденная ситуация в работе связана с невозможностью закрыть двери из-за того, что они заблокированы пассажиром. Этот вид непредвиденной ситуации, как и другие, возникает особенно в случае большого скопления людей. В случае скопления людей закрывание дверей осуществляется заранее.
Номинальный порядок движения соблюдается еще более надежно, поскольку этап 409 простоя предлагает запас времени работы, который позволяет покрыть отсрочки, связанные с этими непредвиденными ситуациями в работе, без последствий для порядка движения транспортных средств установки.
Рассмотрим фиг. 5.
На ней показана первая реализация этапа 411 по фиг. 4, относящегося к проверке условия загруженности транспортного средства.
На этапе 500, который следует за этапом 406, автомат определяет значение, представляющее количество мест, доступных в кабине транспортного средства, или значение FrPlcNr. Альтернативно, оно может быть выражено в процентах.
На следующем этапе 502 автомат сравнивает значение FrPlcNr с пороговым значением FrPlcNr_thr. Если значение FrPlcNr меньше порогового значения FrPlcNr_thr, переходят к следующему этапу 412. Автомат сможет управлять последовательностью закрывания дверей на этапе 407, а затем регистрировать опережение TmFrm по времени на номинальном значении Tn_max на этапе 408. В противном случае автомат дает задержку в течение периода времени dt на этапе 414.
Здесь автомат управляет последовательностью закрывания дверей, как только количество доступных мест в кабине становится ниже порогового значения FrPlcNr_thr доступных мест, при условии, что доступ к транспортному средству был разрешен сверх минимальной продолжительности работы, определяемой значением второго временного параметра Tn_min (условие этапа 412). Он соответствует ожиданию закрывания дверей относительно периода посадки/высадки или максимальной продолжительности работы, соответствующей значению первого временного параметра Tn_max.
Рассмотрим фиг. 6.
На ней показана вторая реализация этапа 411 по фиг. 4, относящегося к проверке условия загруженности транспортного средства.
На этапе 600, который следует за этапом 406, автомат получает значение измерения, представляющее текущий вес кабины транспортного средства, или самого транспортного средства. Это значение может быть получено модулем, аналогичным модулю 306 нагрузки на фиг. 3.
На следующем этапе 602 автомат сравнивает это значение измеренного веса с пороговым значением Wght_thr веса. Если вес кабины больше порогового значения Wght_thr, переходят к следующему этапу 412. Автомат сможет управлять последовательностью закрывания дверей на этапе 407, а затем регистрировать опережение TmFrm на этапе 408. В противном случае автомат дает задержку в течение периода времени dt на этапе 414.
Здесь автомат управляет закрыванием дверей, как только измеренный вес Wght кабины превышает пороговое значения Wght_thr веса, при условии, что доступ к кабине был разрешен сверх минимальной продолжительности работы, определяемой значением второго временного параметра Tn_min (условие этапа 412). Это пороговое значение Wght_thr веса определяется как рабочий порог, а не как порог безопасности. Иными словами, это пороговое значение Wght_thr определяется таким образом, чтобы учесть регулярность порядка движения транспортных средств установки и комфорт пассажиров, а не как предельное значение, относящееся к безопасности, связанное, например, с максимально допустимым весом для транспортного средства. Это пороговое значение Wght_thr может быть связано с количеством пассажиров, например с учетом среднего веса на пассажира.
Рассмотрим фиг. 7.
На ней показана третья реализация этапа 411 по фиг. 4.
Этапы 700 и 702 аналогичны этапам 500 и 502 на фиг. 5, за исключением того, что, когда значение количества свободных мест FrPlcNr больше, чем пороговое значение FrPlcNr_thr, автомат выполняет этапы 704 и 706, аналогичные этапам 600 и 602 на фиг. 6.
В этом варианте осуществления автомат управляет последовательностью закрывания дверей на этапе 407, как только количество доступных мест в транспортном средстве становится меньше порогового значения FrPlcNr_thr или вес этого транспортного средства превышает пороговое значение Wght_thr, в любом случае при условии, что продолжительность открывания этих дверей превысила минимальную продолжительность Tn_min (условие этапа 412).
Рассмотрим фиг. 8.
На ней показано развитие варианта осуществления, показанного на фиг. 6. В конце проверки на этапе 602, в случае, когда вес кабины больше, чем пороговое значение Wght_thr, автомат сравнивает значение веса транспортного средства со значением максимального веса, или значением Wght_max, во время этапа 800. Если измеренный вес меньше максимального веса Wght_max, то автомат управляет последовательностью закрывания дверей на этапе 407 и регистрирует значение TmFrm опережения на этапе 408 в случае, если проверяется условие этапа 412.
В противном случае автомат управляет последовательностью блокировки дверей в открытом положении на этапе 802. Эта последовательность может, в частности, содержать команду подачи сигнала безопасности или приглашения высадиться последним пассажирам, осуществившим посадку.
В этом развитии, как только вес кабины или транспортного средства стал ниже максимального веса Wght_max, двери снова могут быть закрыты, и транспортному средству разрешено покинуть свое положение остановки (этап 410) по истечении простоя, связанного с соблюдением порядка движения транспортных средств (этап 409).
Последовательность закрывания дверей не инициируется до тех пор, пока величина, представляющая загруженность транспортного средства, в данном случае вес кабины, превышает предельное значение, большее, чем пороговое значение.
Значение максимального веса Wght_max представляет собой предельное значение безопасности, устанавливаемое само по себе на основе вместимости транспортного средства, а не его работы. Например, оно установлено стандартами. Это значение может быть получено из количества мест и площади пола кабины с учетом минимальной разрешенной площади на пассажира и среднего веса пассажира.
Это позволяет оптимизировать размеры установки, исходя из значения максимального веса Wght_max, поскольку проверка на этапе 800 гарантирует, что вес транспортных средств на линии не превышает этого максимального значения.
Предпочтительно пороговое значение веса Wght_thr и значение максимального веса Wght_max, относящиеся к транспортному средству или его кабине, определены по отношению друг к другу так, чтобы предотвратить управление последовательностью запирания дверей на этапе 802, по меньшей мере в нормальных условиях работы. Речь идет о том, чтобы не ухудшить порядок движения транспортных средств и, наконец, эффективность работы установки и ее доступность.
Значения первого и второго временных параметров Tn_min и Tn_max, относящихся к минимальной и максимальной продолжительности открывания дверей, параметра FrPlcNr_thr, относящегося к порогу доступных мест в транспортном средстве, а также рабочим порогам и порогам безопасности для веса транспортного средства, представленным пороговыми значениями веса Wght_thr и значением максимального веса Wght_max, определены по отношению друг к другу так, чтобы работа установки была плавной, эффективной, надежной и безопасной. В частности, значения параметров FrPlcNr_thr и порогового веса Wght_thr соответствуют пороговым значениям загруженности транспортного средства. Они определены так, чтобы позволить нескольким дополнительным пассажирам сесть на борт во время последовательности закрывания дверей, обычно во время подачи звукового сигнала, который предшествует закрыванию этих дверей, без учета номинальной вместимости транспортного средства в отношении доступных в нем мест, при этом не превышается максимальное значение веса Wght_max.
Рассмотрим фиг. 9.
На ней подробно показан первый вариант осуществления этапа 500 по фиг. 5, в котором автомат определяет количество доступных мест в транспортном средстве.
На этапе 900 автомат получает значение, представляющее количество незанятых мест в кабине, или значение FrStNr, и значение, представляющее свободную площадь пола в этой кабине, или значение FrSfc. Эти значения могут поступать от автомата транспортного средства, например от модулей FrStDet 204 и FrSpcDet 206 соответственно.
На следующем этапе 902 автомат определяет значение FrPlcNr как результат вызова оценочной функции с этими значениями.
Значения этапа 900 принимаются каждый раз, когда условие VhclOccCnd загруженности оценивается на этапе 411, регулярно, в конце каждого простоя продолжительностью dt (этап 414). Эти значения можно измерять регулярно с интервалом времени, соответствующим простою на этапе 414. Таким образом, на практике эти значения, получают в режиме реального времени, по меньшей мере в течение периода времени, соответствующего открытому состоянию дверей, между концом этапа 402 и началом этапа 407.
Рассмотрим фиг. 10.
На ней подробно показан второй вариант осуществления этапа 500 по фиг. 5, в котором автомат определяет количество доступных мест в транспортном средстве.
Автомат предварительно получил значение FrPlcNr, относящееся к количеству мест, доступных перед последовательностью открывания дверей на этапе 402. Это значение, например, вычисляется автоматом транспортного с помощью модулей FrStDet 204 и FrSpcDet 206.
На этапе 1000, который следует за этапом 406, автомат производит запрос к первому счетчику, относящемуся к количеству пассажиров на борту с момента открывания дверей.
На следующем этапе 1002, автомат производит запрос ко второму счетчику, относящемуся к количеству пассажиров, высадившихся с момента открывания дверей.
На следующем этапе 1004 автомат определяет значение FrPlcNr как разность между суммой начального значения FrPlcNr и количества высадившихся пассажиров и числом севших на борт.
В отличие от предыдущих вариантов осуществления, в частности варианта, показанного на фиг. 9, где значение FrPlcNr измеряется практически в режиме реального времени в течение всей продолжительности открывания дверей, это значение FrPlcNr здесь является результатом единичного измерения или оценки.
Рассмотрим фиг. 11.
На ней показан вариант работы станционного автомата, изображенного на фиг. 4. Согласно этому варианту, условие отправления этапа 410 проверяется по меньшей мере в отношении станционного автомата, который управляет местом стоянки, от конца последовательности запрета доступа на этапе 407, была ли эта последовательность инициирована с опережением относительно первого временного параметра Tn_max (после этапа 412) или нет (после этапа 406). Этот вариант особенно подходит в случае установки, где соблюдение порядка движения транспортных средств контролируется не станционным автоматом или той частью этого автомата, которая управляет местом стоянки. Этот вариант управления сохраняет преимущества, полученные из раннего инициирования запрета доступа к транспортному средству, в частности предоставление временного окна, позволяющего покрыть по меньшей мере часть отсрочки, связанной с непредвиденной ситуацией в работе.
Изобретение не ограничивается описанными выше вариантами осуществления, приведенными только в качестве примера. Изобретение охватывает все варианты, которые может предусмотреть специалист в данной области техники. В частности:
- Были описаны места стоянки, каждое из которых соответствует участку пути, на котором транспортные средства выполняют остановку для посадки и/или высадки пассажиров, например первое положение 112 остановки на фиг. 1. Важно то, что место стоянки организовано в любом случае напротив участка пути, где транспортные средства могут осуществлять посадку или высадку пассажиров, независимо от того, осуществляется ли эта посадка/высадка на неподвижном транспортном средстве или при движении с пониженной скоростью на рассматриваемом участке.
- Устройства платформенных дверей были описаны как устройства, которые могут приводиться в действие для выборочного разрешения и запрета доступа к транспортным средствам с места стоянки. В целом, можно использовать любое устройство, способное выполнять эту функцию. В частности, тип используемого устройства может варьироваться в зависимости от того, происходит ли посадка или высадка на протяженном участке платформы, например в случае, когда транспортные средства движутся с пониженной или ограниченной скоростью, например в случае, когда транспортные средства останавливаются.
- Описаны места стоянки, каждое из которых содержит устройство платформенной двери. Место стоянки может содержать несколько устройств платформенной двери. Несколько мест стоянки также могут иметь одинаковое устройство платформенной двери.
- По меньшей мере некоторые из модулей, описанных в отношении станционного автомата, могут быть по меньшей мере частично интегрированы в качестве альтернативы в автомат транспортного средства в соответствии с предусмотренными вариантами осуществления. Это, в частности, относится к модулю взвешивания, который, в частности, когда взвешивание касается кабины и/или когда датчик нагрузки находится между подвеской транспортного средства и его кабиной, может быть интегрирован в систему 200 автоматизации транспортного средства, а не в систему 300 автоматизации станции. Из соображений точности предпочтительно измерять вес кабины, а не всего транспортного средства. Однако не исключается работа с весом всего транспортного средства.
- Модули, отвечающие за обнаружение незанятых мест, например модуль FrStDet 204 на фиг. 1, и за обнаружение свободной поверхности, например FrSpcDet 206 на фиг. 1, могут быть сгруппированы вместе в одном модуле, например с возможностью определения количества свободных мест в кабине.
- Модули, описанные со ссылкой на фиг. 2 и 3, могут быть по меньшей мере частично заменены функциями связи, позволяющими получать соответствующую информацию от устройств, внешних по отношению к транспортным средствам и/или станции.
- Обычно последовательность, описанная в отношении фиг. 4, не ограничивается случаем транспортных средств, которые останавливаются с целью посадки/высадки. Начальное условие StpVhclCnd можно проверить, когда транспортное средство находится на участке пути, соответствующем месту стоянки. Это условие можно дополнить тем, что транспортное средство соблюдает ограничение скорости относительно платформы.
- Описаны места стоянки для посадки и высадки пассажиров. По меньшей мере некоторые из мест стоянки могут быть предназначены исключительно для посадки или высадки. Таким образом, станционный автомат может быть устроен так, чтобы проверять минимальный простой Tn_min открывания дверей в местах стоянки, предназначенных для высадки пассажиров. Для мест стоянки, предназначенных для посадки, станционный автомат, наоборот, может не проверять этот минимальный простой Tn_min.
- Открывание дверей транспортного средства или платформенных дверей может быть выполнено без вмешательства системы автоматизации транспортного средства или станции, например с помощью чисто механического инициирования. Тем не менее, можно сохранить автоматический контроль закрывания тех или иных платформенных дверей и дверей транспортного средства.
- Описана посадка и высадка пассажиров на месте стоянки, обусловленные как устройством, прикрепленным к платформе, обычно устройством платформенной двери, так и устройством, прикрепленным к транспортному средству, обычно его дверьми. Изобретение может быть предусмотрено без устройства, установленного на месте стоянки, при этом станционный автомат управляет дверьми транспортного средства, по меньшей мере в отношении их закрывания.
Точно так же станционный автомат может не управлять дверьми транспортного средства, если он уже управляет устройством доступа, установленным на месте стоянки. Кроме того, устройство, установленное на месте стоянки, не обязательно физически препятствует доступу к транспортному средству. Альтернативно или дополнительно могут использоваться одно или более сигнальных устройств, таких как, например, цветные огни.
- Был описан второй временной параметр Tn_min, установленный фиксированным. В качестве альтернативы значение этого параметра может варьироваться в зависимости от рассматриваемого транспортного средства, например, в зависимости от его загрузки.
- Описан станционный автомат, отвечающий за проверку критерия максимального веса. Поскольку это функция связана с безопасностью транспортной установки, эта проверка может выполняться с помощью отдельного автомата.
- Пороговое значение веса Wght_thr может быть определено в зависимости от максимальной вместимости, которую транспортное средство не должно превышать из соображений безопасности, например, не должно превышаться максимальным значением веса Wght_max, даже если автомат не проверяет, что эта максимальная вместимость не превышена. В этом случае пороговое значение веса Wght_thr может быть объединено с коэффициентом безопасности.
- Изобретение описано на частном случае установки типа подвесной канатной дороги. Изобретение применимо к канатной пассажирской транспортной установке любого типа, в частности:
- типа воздушного канатной дороги, в частности моноканатной (один несущий тяговый канат), двойной моноканатной (два несущих тяговых каната) или двухканатной (один или более тяговых канатов и один или более несущих канатов);
- типа фуникулера;
- отцепляемого типа, то есть состоящего из одного или более тяговых канатов, движущихся с постоянной скоростью, и транспортных средств, буксируемых этими тросами, которые могут отцепляться для остановки на станции и/или снижения своей скорости с целью посадки/высадки;
- импульсного типа, то есть, когда транспортные средства постоянно прикреплены к одному или более тяговым канатам, при этом скорость этих канатов может изменяться, чтобы позволить транспортным средствам останавливаться на станции;
- челночного типа.
- Изобретение также можно рассматривать как способ управления канатной транспортной установкой.


Изобретение относится к устройству управления канатной транспортной установкой, в частности, в городской или пригородной среде. Устройство управления канатной транспортной установкой, содержащее по меньшей мере один контроллер, способный организовать период посадки (Tn_max) номинальной продолжительности для транспортных средств на станции. Этот период (Tn_max) посадки заканчивается запретом доступа к транспортному средству. Контроллер содержит вход для приема по меньшей мере одной величины, представляющей загруженность транспортного средства. Контроллер выполнен с возможностью реагирования на прием такой величины во время периода посадки (Tn_max) со сравнением ее с пороговым значением и инициированием запрета доступа к транспортному средству заранее, до окончания периода посадки (Tn_max), в зависимости от результата сравнения между указанной величиной и пороговым значением. В результате повышается эффективность эксплуатации так как усовершенствована возможность регулировки потока пассажиров. 3 н. и 16 з.п. ф-лы, 11 ил.
1. Устройство управления канатной транспортной установкой, содержащее по меньшей мере один контроллер (300), способный организовать период (Tn_max) посадки номинальной продолжительности для транспортных средств (108, 110) на станции (100), причем этот период (Tn_max) посадки заканчивается запретом (407) доступа к транспортному средству, отличающееся тем, что контроллер (300) содержит вход для приема по меньшей мере одной величины (FrPlcNr, Wght), представляющей загруженность транспортного средства, и при этом контроллер выполнен с возможностью реагирования на прием такой величины (FrPlcNr, Wght) во время периода (Tn_max) посадки со сравнением ее с пороговым значением (FrPlcNr_thr, Wght_thr) и инициированием запрета (407) доступа к транспортному средству заранее, до окончания периода (Tn_max) посадки, в зависимости от результата сравнения между указанной величиной (FrPlcNr, Wght) и пороговым значением (FrPlcNr_thr, Wght_thr).
2. Устройство по п. 1, отличающееся тем, что контроллер (300) выполнен с возможностью реагирования на прием указанной величины (FrPlcNr, Wght) по истечении минимального периода (Tn_min) доступа к транспортному средству (108, 110).
3. Устройство по любому из пп. 1 или 2, отличающееся тем, что указанная величина (FrPlcNr, Wght) получена в режиме реального времени.
4. Устройство по любому из предыдущих пунктов, отличающееся тем, что указанная величина (FrPlcNr, Wght) частично является результатом по меньшей мере одного измерения (FrStNr, FrSfc, Wght), выполненного на транспортном средстве (108, 110).
5. Устройство по любому из предыдущих пунктов, отличающееся тем, что величина (FrPlcNr, Wght), представляющая загруженность транспортного средства включает величину (FrPlcNr), представляющую количество свободных или занятых мест в транспортном средстве (108, 110).
6. Устройство по п. 5, отличающееся тем, что величина (FrPlcNr), представляющая количество свободных или занятых мест в транспортном средстве, является результатом по меньшей мере одного измерения свободной или занятой поверхности (FrSfc), соответственно, в транспортном средстве (108, 110) и обнаружения свободных или занятых мест (FrStNr), соответственно, в транспортном средстве (108, 110).
7. Устройство по п. 6, отличающееся тем, что измерение свободной или занятой поверхности (FrSfc) получено от одного или более устройств из группы, состоящей из компоновки оптических отражателей, распределенных на полу транспортного средства, и оптических детекторов, распределенных на потолке этого транспортного средства, устройства видеосъемки, связанного со схемой обработки изображений, напольного коврика с распределенными контактными элементами, напольного коврика емкостного типа.
8. Устройство по любому из пп. 6 или 7, отличающееся тем, что обнаружение свободных или занятых мест (FrStNr) в транспортном средстве (108, 110) получено от одного или более устройств из группы, состоящей из устройств взвешивания, установленных в местах, сухих контактов, расположенных в местах, оптического детектора, устройства видеосъемки, связанного со схемой обработки изображений.
9. Устройство по любому из предыдущих пунктов, отличающееся тем, что величина (FrPlcNr, Wght), представляющая загруженность транспортного средства включает величину (Wght), представляющую вес транспортного средства.
10. Устройство по любому из предшествующих пунктов, отличающееся тем, что пороговое значение (FrPlcNr_thr, Wght_thr) соответствует пороговому значению загруженности транспортного средства.
11. Устройство по любому из предыдущих пунктов, отличающееся тем, что пороговое значение (FrPlcNr_thr, Wght_thr) частично определено по меньшей мере в зависимости от предельного значения безопасности (Wght_max).
12. Устройство по любому из предыдущих пунктов, отличающееся тем, что период (Tn_max) посадки происходит в соответствии с первым простоем, и, когда контроллер (300) инициирует запрет (407) доступа с опережением (TmFrm) первого простоя, автомат организует задержку простоя определенной продолжительности после этого запрета доступа (408), при этом продолжительность задержки простоя определяется в зависимости от этого опережения (TmFrm).
13. Устройство по п. 12, отличающееся тем, что продолжительность задержки простоя соответствует указанному опережению (TmFrm), из которого при необходимости вычитается отсрочка запрета (407) доступа.
14. Устройство по любому из пп. 12 или 13, отличающееся тем, что в конце задержки простоя автомат проверяет выполнение условия отправления (StrtVhclCnd) и предпочтительно генерирует порядок отправления.
15. Устройство по любому из предыдущих пунктов, отличающееся тем, что величина (Wght), представляющая загруженность транспортного средства, содержит значение загруженности, и контроллер (300) выполнен с возможностью инициирования запрета (407) доступа к транспортному средству, когда значение загруженности больше порогового значения (Wght_thr).
16. Устройство по любому из предыдущих пунктов, отличающееся тем, что величина (FrPlcNr), представляющая загруженность транспортного средства, содержит значение незагруженности, и контроллер (300) выполнен с возможностью инициирования запрета (407) доступа к транспортному средству, когда значение незагруженности меньше порогового значения (FrPlcNr_thr).
17. Устройство по любому из предыдущих пунктов, отличающееся тем, что контроллер (300) выполнен с возможностью не инициировать запрет доступа к транспортному средству (408) до тех пор, пока величина (FrPlcNr, Wght), представляющая загруженность транспортного средства, больше предельного значения загруженности транспортного средства (Wght_max), большего, чем указанное пороговое значение (FrPlcNr_thr, Wght_thr).
18. Канатная транспортная установка, содержащая транспортные средства (108, 110) и по меньшей мере одну станцию (100), при этом установка дополнительно содержит контроллер (300), способный организовать период (Tn_max) посадки номинальной продолжительности для транспортных средств (108, 110) на указанной станции (300), причем этот период (Tn_max) посадки заканчивается запретом доступа к транспортному средству, отличающаяся тем, что контроллер (300) содержит вход для приема по меньшей мере одной величины (FrPlcNr, Wght), представляющей загруженность транспортного средства, и при этом контроллер выполнен с возможностью реагирования на прием такой величины (FrPlcNr, Wght) во время периода (Tn_max) посадки со сравнением ее с пороговым значением (FrPlcNr_thr, Wght_thr) и инициированием запрета (407) доступа к транспортному средству заранее, до окончания периода посадки, в зависимости от результата сравнения между указанной величиной (FrPlcNr, Wght) и пороговым значением (FrPlcNr_thr, Wght_thr).
19. Способ управления канатной транспортной установкой, в которой организован период (Tn_max) посадки номинальной продолжительности для транспортных средств (108, 110) на станции (100), причем этот период (Tn_max) посадки заканчивается запретом доступа к транспортному средству, при этом способ включает следующие этапы:
прием по меньшей мере одной величины (FrPlcNr, Wght), представляющей загруженность транспортного средства,
реагирование на прием такой величины во время периода (Tn_max) посадки со сравнением ее с пороговым значением (FrPlcNr_thr, Wght_thr) и инициированием запрета (407) доступа к транспортному средству заранее, до окончания периода (Tn_max) посадки, в зависимости от результата сравнения между указанной величиной (FrPlcNr, Wght) и пороговым значением (FrPlcNr_thr, Wght_thr).
| FR 2953476 A1, 10.06.2011 | |||
| EP 3009993 A1, 20.04.2016 | |||
| JP H06234363 A, 23.08.1994 | |||
| JP H5058276 A, 09.03.1993 | |||
| JP 2009122863 A, 04.06.2009 | |||
| СИСТЕМА КАНАТНОЙ ДОРОГИ | 2015 |
|
RU2671930C1 |

