Область техники, к которой относится изобретение
Настоящее изобретение относится к способу определения продолжительности процесса посадки и/или процесса высадки по меньшей мере одного автономного подвижного объекта, перевозимого подвижной единицей. Настоящее изобретение дополнительно относится к использованию такого способа определения, а также к способу обучения модели, используемой в способе определения.
Уровень техники
К современным железнодорожным системам, а также современным поездам, эксплуатируемым в таких железнодорожных системах, предъявляются повышенные требования, такие как работа по предсказуемым графикам и с высокой точностью, а также безопасное и надежное движение. Следовательно, непредвиденные случаи, такие как ограничение или блокировка функций компонентов поезда или сети путей, или препятствия на пути или помехи движению поезда на путях или станциях, могут нарушить правильную работу выбранного поезда или всей сети путей. Например, двери являются, как правило, одним из "самых слабых" компонентов поезда, то есть двери очень часто ломаются, а если дверь заблокирована, пассажиры не могут использовать ее для посадки в поезд и высадки из него. В результате время остановки поезда на станции может увеличиться, так как пассажирам потребуется больше времени для посадки и высадки из-за сокращения количества рабочих дверей, что в свою очередь может привести к задержке поезда. Эта проблема становится особенно актуальной для поездов метрополитена и поездов местного сообщения в часы "пик", так как эти поезда обычно имеют много остановок, и количество пассажиров является большим. Во многих случаях машинисты поездов должны платить высокие штрафы за каждую минуту задержки поезда, если это происходит из-за технической проблемы.
Например, известно, что контроль за процессом посадки и/или процессом высадки осуществляется в реальном времени с помощью датчиков, установленных на двери. Таким образом, датчики обнаруживают, имеются ли еще пассажиры, осуществляющие посадку или высадку из поезда через выбранную дверь. Благодаря выходному сигналу датчика осуществляется контроль текущей ситуации около двери. В настоящее время не проводятся профилактические оценки увеличения времени из-за ситуаций, связанных, например, со сломанными дверями.
Первая задача настоящего изобретения состоит в том, чтобы выполнить способ определения продолжительности процесса посадки и/или процесса высадки по меньшей мере одного автономного подвижного объекта, перевозимого подвижной единицей, с помощью которого можно устранить вышеупомянутые недостатки, и, в частности, выполнить способ, который оптимизирует работу транспортной сети, получая в результате более гибкую, надежную, экономичную по времени и затратам сеть по сравнению с той, которая известна из уровня техники.
Кроме того, вторая задача изобретения состоит в том, чтобы обеспечить преимущественное использование способа определения продолжительности процесса посадки и/или процесса высадки.
Более того, третья задача настоящего изобретения состоит в том, чтобы выполнить способ обучения модели, используемой при осуществлении способа определения, который позволяет быстро и надежно выполнить способ определения.
Раскрытие сущности изобретения
Соответственно, настоящее изобретение обеспечивает способ определения продолжительности процесса посадки и/или процесса высадки по меньшей мере одного автономного подвижного объекта, перевозимого подвижной единицей.
Предполагается, что способ содержит этап: определения продолжительности процесса посадки и/или процесса высадки по меньшей мере одного автономного подвижного объекта, осуществляющего посадку и/или высадку из подвижной единицы, с использованием модели, описывающей процесс посадки и/или процесс высадки по меньшей мере одного автономного подвижного объекта, осуществляющего посадку и/или высадку из подвижной единицы при целенаправленном динамичном перемещении в пространстве.
Благодаря операциям способа согласно изобретению можно предпочтительно эффективно управлять подвижной единицей, такой как поезд. Можно легко оценить задержки поезда. Более того, в связи с возможностью точного вычисления периодов времени выполнения операций и расписания движения поездов, поезда можно использовать без нарушения работы сети даже в том случае, если компонент, такой как дверь, функционирует неправильно или сломан. Кроме того, задержку можно вычислить быстро, обеспечивая при этом преимущественное взаимодействие в режиме реального времени. В дополнение к этому, можно сократить затраты и время, а также предотвратить штрафы из-за задержек.
Даже в том случае, если выбранный термин используется в форме единственного числа или в определенной числовой форме в формуле изобретения и описании, объем патента (заявки) не должен ограничиваться формой единственного числа или определенной числовой формой. Кроме того, объем изобретения должен охватывать более одной или несколько конкретных конструкций.
Выражение "автономный подвижный объект" означает объект, который может двигаться самостоятельно или, другими словами, объект, который принимает активное участие во время посадки или высадки из подвижной единицы. Автономный подвижный объект может упоминаться в приведенном ниже тексте как "объект". Следовательно, автономный подвижный объект может быть объектом, выбранным из группы, состоящей из: человека, животного, робота и транспортного средства. Под выражением "перевозимый подвижной единицей" следует понимать возможность перемещения объекта с помощью подвижной единицы в будущем (после посадки) и/или в прошлом (перед высадкой). Следовательно, можно также использовать выражение "перевозимый подвижной единицей и/или перевезенный подвижной единицей".
Подвижная единица может представлять собой любую единицу транспортного средства, в частности, сконструированную единицу, такую как моторизированное транспортное средство (автомобиль, мотоцикл, велосипед, автомобиль-фургон, грузовик, автобус, поезд), которое может перемещаться, в частности, под управлением человека. Предпочтительно, это транспортное средство может быть рельсовым транспортным средством. Рельсовое транспортное средство подразумевает любое транспортное средство, выполнимое для специалиста в данной области техники, которое вследствие физического взаимодействия с путем, в частности, с заранее заданным путем, ограничено этим путем или маршрутом. Под физическим взаимодействием/соединением следует понимать соединение с геометрическим замыканием, электрическое соединение или магнитное соединение. Физическое соединение может быть разъемным. В этом контексте "заданный путь" означает ранее существовавший путь или маршрут, построенный человеком и содержащий выбранные средства, которые образуют или формируют путь, такой как рельсы или кабель. Заданный путь может также упоминаться в приведенном ниже тексте как путь. Предпочтительно, заданный путь является путем линии метрополитен или железнодорожным путем, таким как магистральные железные дороги в Великобритании, Германии или России.
Транспортное средство может представлять собой поезд, подземную железную дорогу, трамвай или троллейбус. Предпочтительно, рельсовое транспортное средство может быть поездом. Следовательно, способ может использоваться в тех случаях, когда несколько транспортных средств движутся по одному и тому же пути. Предпочтительно рельсовое транспортное средство или поезд может быть высокоскоростным поездом. Таким образом, способ можно использовать для сети, в которой высокий уровень безопасности является важным и необходимым. Рельсовое транспортное средство может также упоминаться в приведенном ниже тексте как транспортное средство или поезд.
В этом контексте процесс посадки и/или процесс высадки подразумевает все действия, выполняемые одним специально выбранным автономным подвижным объектом в отношении входа и/или выхода из подвижной единицы, которые осуществляются непосредственно подвижной единицей и сопутствующими объектами, окружающими или движущимися наряду с входом и/или выходом из подвижной единицы. Таким образом, это касается фактического действия, связанного с входом/выходом из подвижной единицы, а также всех предварительных и последующих действий в отношении этого действия входа/выхода, такого как перемещение выбранного объекта в или из подвижной единицы из (безопасной) начальной точки в (безопасную) конечную точку или ожидание выбранным объектом препятствий (например, другого присутствующего объекта) для входа или выхода из подвижной единицы. Выражения "процесс посадки" и "процесс высадки" могут упоминаться в дальнейшем как "посадка" и "высадка". Более того, "продолжительность" означает время, необходимое для осуществления/выполнения/окончания процесса посадки и/или процесса высадки.
Продолжительность определяется по меньшей мере для одной станции или остановки подвижной единицы, но может определяться для нескольких станций по отдельности или для совокупности нескольких станций. Более того, согласно изобретению определение выполняется для одного специально выбранного автономного подвижного объекта. Однако это можно выполнить по отдельности для нескольких объектов, и определение может учитывать продолжительность/время, необходимую/необходимое одновременно всем объектам. Кроме того, определение может быть выполнено для одного положения/местоположения подвижной единицы или для нескольких местоположений. Например, продолжительность можно определить для одной двери или для нескольких дверей подвижной единицы. Однако, поскольку процесс посадки и/или высадки через каждую дверь обычно выполняется одновременно, общая продолжительность определяется с помощью продолжительности, относящейся к двери, через которую происходит самая продолжительная (без накопления интервалов времени) посадка/высадка.
Модель может представлять собой любую модель, выполнимую для специалиста в данной области техники, которая описывает посадку/высадку при целенаправленном динамичном перемещении в пространстве. Однако наиболее подходящей моделью посадки и/или высадки может быть модель, выбранная из группы, состоящей из: модели клеточного автомата и модели социальных сил. Следовательно, динамику движения можно определить и оценить эффективным и надежным образом. Например, для получения дополнительной информации о модели клеточного автомата смотри работу "Blue VJ, Adler JL (2001) Cellular automata microsimulation for modeling bidirectional pedestrian walkways. Transp Res Part B Methodol 35: 293–312" и о модели социальных сил смотри работу "Johansson A, Helbing D, Shukla PK (2007) Specification of the social force pedestrian model by evolutionary adjustment to video tracking data. Adv Complex Syst 10: 271–288".
В дополнительном варианте осуществления изобретения в модели клеточного автомата используется сетка по меньшей мере с одной ячейкой, в которой размер по меньшей мере одной ячейки зависит от среднего значения, относящегося к категории по меньшей мере одного автономного подвижного объекта. Таким образом, определение может быть адаптировано к индивидуальным потребностям, а также к различным настройкам. В этом контексте "категория … объекта" означает характеристику объекта, такую как габариты, размер, длина, форма и т.д. Более того, выражение "среднее значение" относится к среднему значению, полученному в результате изучения специфической характеристики множества сопоставимых объектов, таких как все мужчины из выбранной группы, все инвалидные коляски с электроприводом и т.д. Кроме того, зону наблюдения можно разбить на решетку с ячейками.
Кроме того, предпочтительно, когда модель клеточного автомата использует шестиугольную сетку из-за двух своих дополнительных естественных направлений движения. Эта сетка является особенно предпочтительной по сравнению с квадратной сеткой. Диаметр ячейки может быть выбран исходя из необходимого размера в зависимости от требований к размерам объекта. Диаметр следует определять как диаметр внешнего круга вокруг шестиугольника. Диаметр может находиться между 200 сантиметрами (см) и 25 см, предпочтительно между 75 см и 35 см и наиболее предпочтительно между 60 см и 40 см. Следовательно, эти размеры подходят под инвалидные коляски с электроприводом, сопоставимые по размеру с собаками. Предпочтительно, диаметр ячейки устанавливается равным 53 см для того, чтобы человек, принадлежащий к европеоидной расе среднего телосложения, помещался в эту ячейку. Этот параметр можно адаптировать таким образом, чтобы он лучше подходил, например, для пешеходов уроженцев Азии или детей.
Предпочтительно, модель клеточного автомата может использовать двумерную плоскость и, таким образом, адаптироваться к объектам, таким как пешеходы, которые перемещаются в одной плоскости, то есть только в двух измерениях. Следовательно, пространственные размеры и топология могут быть выбраны таким образом, чтобы соответствовать важнейшим свойствам объекта или всей системы.
Для получения правильных прогнозов модель обрабатывает по меньшей мере один входной параметр. Входным параметром может быть любой входной параметр, осуществимый для специалиста в данной области техники, который описывает или характеризует процесс посадки, и/или процесс высадки или любой элемент/время/условие, относящиеся к этим процессам. Входной параметр является переменной, выбранной из группы, состоящей из: данных посадки и/или высадки, данных конфигурации, временных данных и эксплуатационных данных. Модель может работать с несколькими переменными одновременно, а также с разными или несколькими значениями одного и того же типа переменных.
Данные посадки и/или высадки, главным образом, касаются процесса посадки и/или высадки и могут представлять собой входную переменную, выбранную из группы, состоящей из: числа, вида или размера объекта, расположенного внутри подвижной единицы, числа, вида или размера объекта, расположенного вне подвижной единицы, количества препятствий, расположенных внутри подвижной единицы, количества препятствий, расположенных вне подвижной единицы, количества препятствий в подвижной единице и положения объекта.
В этом контексте под объектом следует понимать активную часть во время процесса посадки/высадки и препятствия в качестве неактивной части. Следовательно, препятствием может быть другой автономный подвижный объект или пассивное препятствие, такое как (временный) стационарный элемент/предмет (например, стена, перила, ступенька, железнодорожное место, багаж, тележка, детская коляска, урна для мусора, зона технического обслуживания, нефункционирующая, заблокированная, сломанная дверь и т.д.), который может оказывать воздействие на, или мешать или блокировать активный объект во время посадки/высадки.
Более того, данные конфигурации, главным образом, касаются одной или более характеристик, таких как одна или более пространственных или размерных характеристик одного или более элементов или компонентов, задействованных в процессе посадки и/или высадки, и может быть входной переменной, выбранной из группы, состоящей из: местоположения, размера или вида препятствия внутри и за пределами подвижной единицы, характеристики подвижной единицы, такой как количество вагонов, характеристики станции подвижной единицы, например, в каком направлении поезд движется в направлении станции и, таким образом, с какой стороны у поезда будут открываться двери.
Предпочтительно и преимущественно точная топология объекта, препятствие(я), и/или подвижная единица, или ее часть(и), и/или элемент(ы) или компонент(ы), задействованные в процессе посадки и/или высадки, могут учитываться этой моделью. Следовательно, посадка/высадка может быть смоделирована реалистично и точно.
Кроме того, временные данные, главным образом, относятся к признакам, связанным со временем, и могут представлять собой входную переменную, выбранную из группы, состоящей из: запланированного времени прибытия на станцию подвижной единицы, запланированного времени отправления со станции подвижной единицы, фактического времени прибытия на станцию подвижной единицы, фактического времени отправления со станции подвижной единицы и предпочтительной продолжительности процесса посадки или процесса высадки.
Кроме того, эксплуатационные данные, главным образом, касаются эксплуатационных характеристик элементов или компонентов, задействованных в процессе посадки и/или высадки, и могут представлять собой входную переменную, выбранную из группы, состоящей из: скорости свободного перемещения объекта, скорости подвижной единицы и скорости открытия двери подвижной единицы.
По виду входная переменная может принадлежать к нескольким категориям, однако они сортируются, как показано выше, по отношению к их основной функции.
Перемещение объекта зависит от окружающей его среды, как свободное пространство для перемещения и наличия других объектов и препятствий. Эти факторы определяют скорость свободного перемещения объекта. Преимущественно, скорость свободного перемещения объекта находится между 1 м/с и 1,5 м/с, предпочтительно между 1,2 м/с и 1,4 м/с и наиболее предпочтительно 1,34 м/с. Было показано, что эти значения представляют собой скорости, найденные в контексте перемещения пешеходов, например, на станции или на платформе.
Как объяснялось выше, на посадку и/или высадку автономного подвижного объекта могут влиять несколько факторов, таких как препятствия, окружающие объект или расположенные вдоль пути, выбранного во время посадки и/или высадки. Такое препятствие может располагаться/находиться за пределами, внутри или рядом с подвижной единицей и может представлять собой любой элемент или конструкцию, выполнимую для специалиста в данной области техники, такой как стена, перила, ступенька, железнодорожное место, багаж, чемодан, тележка, детская коляска, урна для мусора, зона технического обслуживания, нефункционирующая, заблокированная, сломанная дверь. Согласно предпочтительной конкретизации препятствием может быть другой автономный подвижный объект и стационарный элемент, и, главным образом, препятствием в подвижной единице является сломанная дверь. Таким образом, препятствия или неисправности можно учитывать во время определения продолжительности посадки и/или высадки.
В этом контексте под выражением "сломанная дверь" следует понимать дверь, предназначенную для входа и выхода из подвижной единицы, которая не может правильно работать или использоваться по какой-либо причине. Например, она может быть сломана или заблокирована. Например, дверь может быть заблокирована чем-то изнутри или снаружи подвижной единицы, поэтому эту дверь запрещено использовать.
Изобретение дополнительно относится к использованию ранее описанного способа определения, предназначенного для определения задержки подвижной единицы на станции подвижной единицы, при этом процесс посадки и/или процесс высадки происходят на станции.
Предполагается, что задержка определяется путем:
сравнения определенной продолжительности процесса посадки и/или процесса высадки с заданной продолжительностью процесса посадки и/или процесса высадки; и
если определенная продолжительность процесса посадки и/или процесса высадки является более продолжительной, чем заданная продолжительность процесса посадки и/или процесса высадки,
то разность между определенной продолжительностью процесса посадки и/или процесса высадки и заданной продолжительностью процесса посадки и/или процесса высадки равна задержке подвижной единицы на станции.
В соответствии с предметом изобретения можно легко оценить задержки поезда на выбранной станции. Более того, можно сократить затраты и время, а также можно предотвратить штрафы из-за задержек.
В этом контексте "заданная продолжительность процесса посадки и/или процесса высадки" означает заранее определенную или известную продолжительность. Эта продолжительность может быть известна из-за исторического опыта или установлена в соответствии с необходимыми требованиями.
Предложенное изобретение может использоваться для определения общей задержки подвижной единицы по расстоянию перемещения подвижной единицы, где расстояние перемещения ведет через несколько станций к конечной станции подвижной единицы, и где определение общей задержки подвижной единицы на расстоянии перемещения на конечной станции основано на накоплении задержек на соответствующих нескольких станциях и на конечной станции. Предпочтительно работой подвижной единицы можно управлять эффективным образом.
Чтобы использовать вычисления общей задержки с существующим или заданным графиком, накопление может учитывать по меньшей мере одно граничное условие. Это граничное условие может быть любым условием, выполнимым для специалиста в данной области техники, и может быть, например, заранее установленным временем отправления на выбранной станции или периодом времени, относящимся к занятому участку пути (подвижная единица приобретает задержку, вступая в конфликт с одной или более другими подвижными единицами, движущимися по пути подвижной единицы).
Предложенное изобретение можно дополнительно использовать для прогнозирования в реальном времени задержки и/или общей задержки, причем определение задержки и/или общей задержки основано на реальных временных данных в качестве входных данных для пространственной целенаправленной динамической модели. Так как определение выполняется быстро, то можно быстро установить задержку. Это позволяет оператору сети быстро реагировать, например, на приведение в действие контрмер.
Предложенное изобретение можно дополнительно использовать для автономного моделирования задержки и/или общей задержки, причем определение задержки и/или общей задержки основано на исторических данных в качестве входных данных для пространственной целенаправленной динамической модели. Благодаря этому можно точно рассчитать время работы и графики. Следовательно, поезда можно эксплуатировать без ущерба для работы сети, даже если такой компонент, как дверь, функционирует неправильно или сломан.
Изобретение дополнительно относится к способу обучения пространственной целенаправленной динамической модели, в частности, пространственной целенаправленной динамической модели согласно вышеописанному способу.
Предложенный способ обучения содержит по меньшей мере следующие этапы:
предоставление набора данных обучения, которые содержат множество данных обучения,
причем данные обучения содержат продолжительность процесса посадки и/или процесса высадки по меньшей мере одного автономного подвижного объекта, осуществляющего посадку и/или высадку из подвижной единицы, и
кроме того, данные обучения выбираются из группы, состоящей из:
данных посадки и/или высадки, и/или
данных конфигурации, и/или
временных данных, и/или
эксплуатационных данных и/или
обучение модели с использованием набора данных обучения, в котором адаптирован по меньшей мере один параметр модели.
Благодаря способу согласно изобретению обучение может быть выполнено эффективно и быстро. Более того, этот способ обеспечивает гораздо более высокую надежность определения по сравнению со способами уровня техники.
Предпочтительно, данные посадки и/или высадки, и/или данные конфигурации, и/или временные данные и/или эксплуатационные данные представляют собой по меньшей мере одну переменную, как упомянуто выше.
Изобретение дополнительно относится к системе определения, предназначенной для определения продолжительности процесса посадки и/или процесса высадки по меньшей мере одного автономного подвижного объекта, перевозимого подвижной единицей. Предложено, чтобы система определения содержала устройство определения, выполненное с возможностью выполнения этапа определения способа согласно изобретению.
Система определения может содержать компьютер и может располагаться в и/или управляться из центра управления сети. Более того, используемые входные данные или необходимые данные, такие как заданная продолжительность, переменные, исторические данные, граничное условие, могут храниться в базе данных системы определения или ее компьютера.
Благодаря этим признакам изобретения определение можно выполнять автоматически и, таким образом, можно сократить затраты, время и трудовые ресурсы.
Изобретение и/или его описанные варианты осуществления можно осуществить по меньшей мере частично или полностью в виде программного обеспечения и/или аппаратных средств, в последнем случае, например, посредством специальной электрической цепи.
Кроме того, изобретение и/или его описанные варианты осуществления можно осуществить по меньшей мере частично или полностью посредством машиночитаемого носителя, имеющего компьютерную программу, причем компьютерная программа при ее исполнении на компьютере выполняет способ согласно изобретению и/или согласно его вариантам осуществления.
Таким образом, предложено использовать способ, который позволяет автоматически производить оценку задержки поезда, например, из-за сломанной(ых) двери(ей).
Таким образом, преимущества изобретения представлены ниже.
Машинисты поездов могут более эффективно управлять работой поезда, то есть, если они управляют поездом с одной или более сломанными дверями, они могут вычислить, на каком пути и в какое время дня одна или более сломанных дверей приведут к задержке поезда, и когда нет (и какой продолжительной может быть эта задержка), что может помочь в принятии ими решений, где и какой поезд должен работать, чтобы минимизировать задержки и, следовательно, штрафы.
Способ можно использовать в реальном времени и в автономном режиме. Автономный режим необходим для оценки возможных задержек в случае использования поезда с одной или более сломанными дверями. И режим реального времени для оценки текущей задержки поезда (для предсказания задержки поезда) основан на текущей ситуации. Это позволяет выиграть время для реагирования в случае, если это необходимо.
Это позволяет производить автоматический расчет задержки поезда.
Способ выполняется быстро даже в случае сложного сценария, когда время моделирования на обычном ПК такого сценария для поезда составляет менее одной секунды.
Данный способ позволяет сократить время и затраты.
Приведенное выше описание предпочтительных вариантов осуществления изобретения содержит многочисленные признаки, которые частично объединены друг с другом в зависимых пунктах формулы изобретения. Целесообразно, чтобы эти признаки можно было рассматривать по отдельности и объединять друг с другом в дополнительные подходящие комбинации. Кроме того, признаки способа, сформулированные как аппаратные признаки, могут рассматриваться как признаки совокупности компонентов и, соответственно, признаки совокупности компонентов, сформулированные как признаки процесса, можно рассматривать как признаки способа.
Вышеописанные характеристики, признаки и преимущества изобретения и способ их достижения можно более четко понять в связи с последующим описанием примерных вариантов осуществления, которые будут объяснены со ссылкой на чертежи. Примерные варианты осуществления предназначены для иллюстрации изобретения, но не должны ограничивать объем изобретения комбинациями признаков, приведенных в нем с точки зрения функциональных признаков. Кроме того, подходящие признаки каждого из примерных вариантов осуществления могут быть также явно рассмотрены изолированно, исключены из одного из примерных вариантов осуществления, введены в другой примерный вариант осуществления и/или объединены с любым из пунктов прилагаемой формулы изобретения.
Краткое описание чертежей
Настоящее изобретение будет описано со ссылкой на чертежи, на которых:
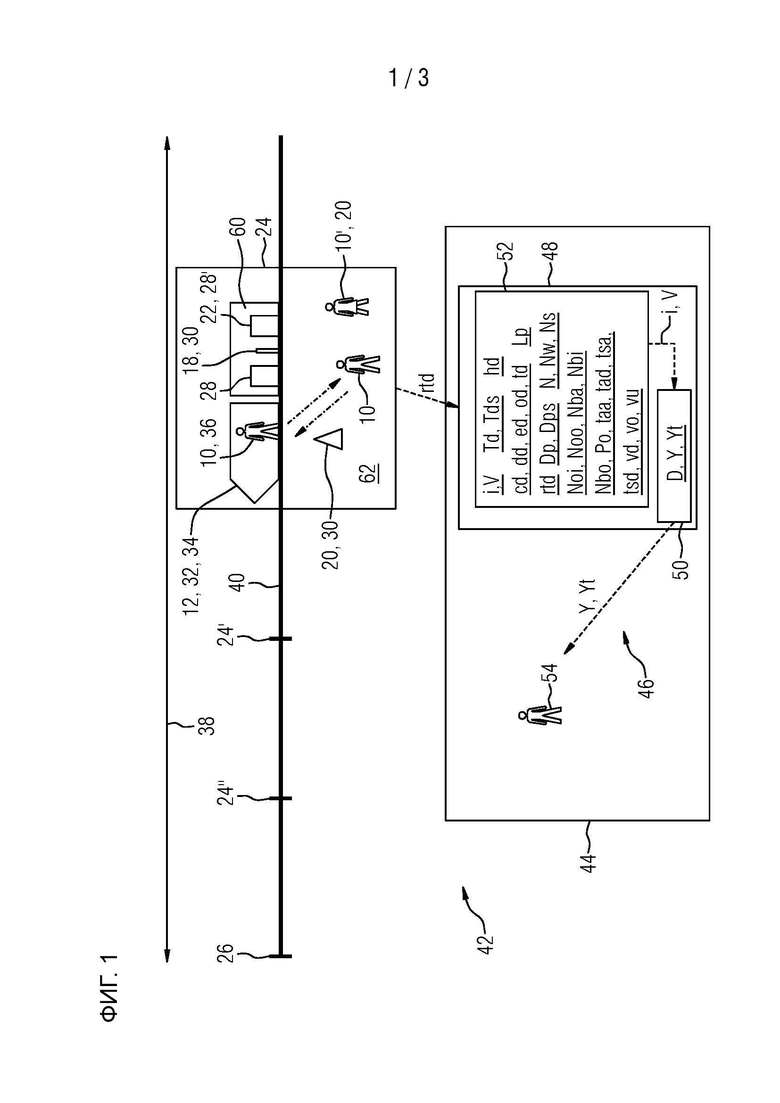
на фиг. 1 схематично показан путь с несколькими станциями для подвижной единицы, используемой объектом, а также системой определения для определения продолжительности процесса посадки и/или процесса высадки;
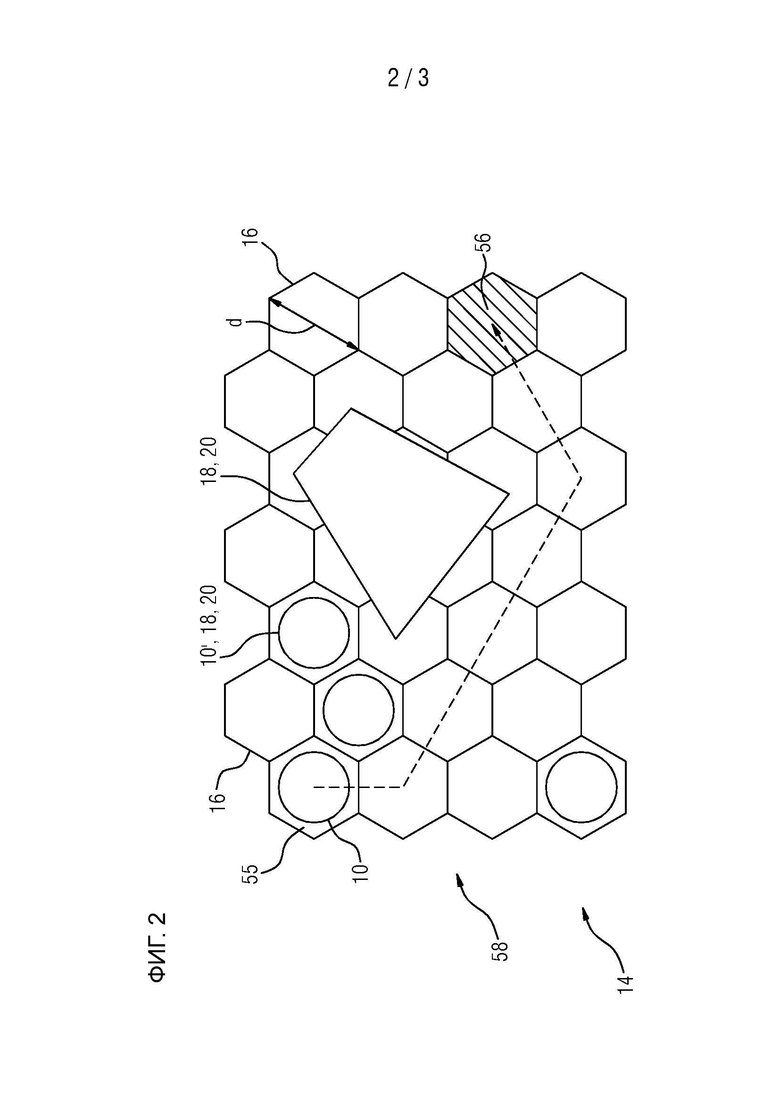
на фиг. 2 показано перемещение объекта (фиг. 1) в связи с моделью клеточного автомата;
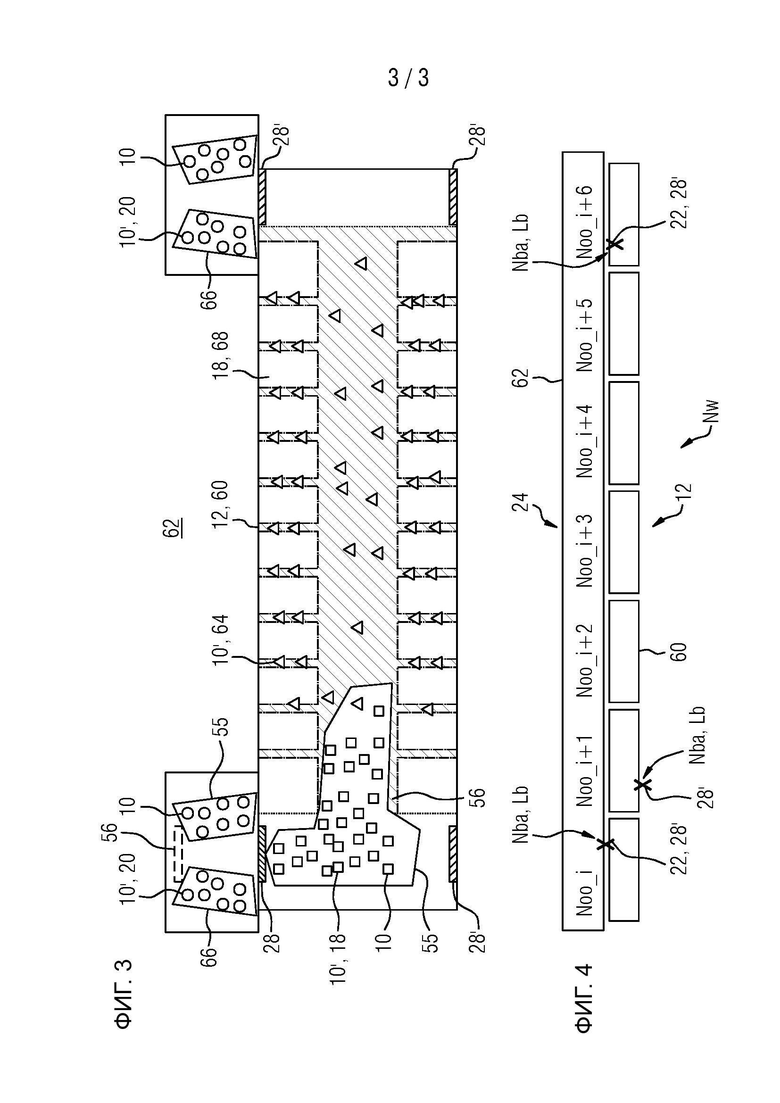
на фиг. 3 показана подвижная единица (фиг. 1) на одной станции при подготовке сценария моделирования посадки в и/или высадки из поезда; и
на фиг. 4 показано схематичное представление сценария (фиг. 3).
Осуществление изобретения
На фиг. 1 показан в схематичном виде заданный путь 40 железной дороги или системы 42 метрополитена, такой, например, как железнодорожная магистраль Германии или России или Мюнхенское метро. Более того, на фиг. 1 показана подвижная единица 12, такая как рельсовое транспортное средство 32, например, поезд 34 в виде поезда 34 метрополитена, который движется по заданному пути 40. Приведенные ниже в тексте термины подвижная единица 12, транспортное средство 32 и поезд 34 будет использоваться синонимично. Подвижная единица 12 перемещается на расстояние 38 перемещения по пути 40. Вдоль этого пути 40 подвижная единица проходит или прибывает и отправляется, соответственно, с нескольких станций 24, 24’, 24’’, при этом на фиг. 1 в качестве примера показана более подробно одна станция 24. Кроме того, поездка подвижной единицы 12 заканчивается на конечной станции 26. Таким образом, путь на расстоянии 38 перемещения проходит через несколько станций 24, 24’, 24’’ до конечной станции 26. Предварительное или последующее перемещение из/в зону технического обслуживания или парковки для подвижной единицы 12 в данном описании не рассматривается.
Подвижная единица 12 перевозит по меньшей мере один автономный подвижный объект 10, такой как человек 36 (пассажир), животное, робот или транспортное средство. Для перевозки поездом 34 или поездки на нем объект 10 садится в подвижную единицу 12 на станции 24, и в случае, если объект 10 перевозился поездом 34 или ехал на нем, объект 10 высаживается из подвижной единицы 12 на станции 24. Следовательно, процесс посадки и/или процесс высадки происходит на (конечной) станции 24, 24’, 24’’, 26. Для посадки/высадки поезд 34 содержит несколько дверей 28, 28’, две из которых показаны на фиг. 1 в качестве примера.
Как правило, несколько объектов 10, 10’, людей 36 или пассажиров одновременно пользуются поездом 34. Например, в этом описании только один объект 10 будет изучаться или исследоваться в качестве активного участника процесса посадки или процесса высадки. Это изображено с помощью противоположно направленных стрелок, показанных пунктирными линиями, соединяющими объект 10 вне поезда 34 (на станции 24) и объект 10 внутри поезда 34. Другие представленные автономные подвижные объекты 10’ будут рассматриваться в качестве пассивных элементов и, таким образом, в качестве препятствия 18, 20 для активного объекта 10. Однако, так как обычно несколько объектов 10, 10’ или пассажиров садятся/высаживаются из поезда 34, все объекты 10, 10’ контролируются по отдельности, и полученная продолжительность представляет собой продолжительность D, необходимую для всех объектов 10, 10’.
Кроме того, могут присутствовать другие препятствия 18, 20, 22 внутри поезда 34 (препятствия 18), а также вне поезда 34 (препятствия 20) или в поезде 34 (препятствия 22). Эти препятствия 18, 20, 22 могут быть, например, неподвижным элементом 30, таким как стена, перила, ступенька, железнодорожное место, багаж, тележка, детская коляска, урна для мусора, зона технического обслуживания и т.д. Более того, как изложено выше, препятствие 18, 20 может быть также другим движущимся (пассивным) объектом 10’, таким как не садящийся на поезд пассажир, находящийся на платформе 62 на станции 24, 24’, 24’’, 26, или не высаживающийся пассажир, находящийся внутри поезда 34. Препятствие 22 в подвижной единице 12 может представлять собой, например, неработающую, заблокированную или сломанную дверь 28’ (смотри на фиг. 3 заштрихованный прямоугольник в левой ориентации (снизу вверх).
Система 42 метрополитена дополнительно имеет центр 44 управления, который содержит компьютер 46, оснащенный подходящей компьютерной программой, которая содержит инструкции, которые, при их исполнении компьютером 46, предписывает компьютеру 46 выполнять этапы способа определения. Предложенный способ обеспечивает определение продолжительности D процесса посадки и/или процесса высадки автономного подвижного объекта 10 (активного пассажира), перевозимого подвижной единицей 12 (детали смотри ниже).
Более того, центр 42 управления содержит в качестве части компьютера 46 систему 48 определения для выполнения способа определения продолжительности D процесса посадки и/или процесса высадки. Поэтому, система 42 управления содержит по меньшей мере одно устройство 50 определения для выполнения этапов определения способа определения. Устройство 50 определения является устройством обработки. Более того, оно содержит запоминающее устройство 52 для хранения параметров, таких как входной параметр i, переменные V или исторические данные hd. Параметры можно использовать для определения продолжительности D с помощью устройства 50 определения (на фиг. 1 для большей наглядности показан только ввод входного параметра i и переменной V). Центр 44 управления может контролироваться оператором 54, который может также принимать поступающие выходные данные, такие как задержка Y или общая задержка Yt (детали смотри ниже).
Как изложено выше, изобретение касается способа определения продолжительности D процесса посадки и/или процесса высадки автономного подвижного объекта 10, перевозимого подвижной единицей 12. Это выполняется путем определения продолжительности D процесса посадки и/или процесса высадки автономного подвижного объекта 10, осуществляющего посадку и/или высадку из подвижной единицы 12, с использованием модели, описывающей процесс посадки и/или процесс высадки автономного подвижного объекта 10, осуществляющего посадку и/или высадку из подвижной единицы 12, при целенаправленном динамичном перемещении в пространстве. Более того, модель посадки и/или высадки является моделью, выбранной из группы, состоящей из: модели клеточного автомата и модели социальных сил. Другими словами, модель может представлять собой, например, модель клеточного автомата или модель социальных сил.
Для определения продолжительности D требуется по меньшей мере один входной параметр i или входные данные, или они обрабатываются с помощью модели. Этот входной параметр i может храниться в запоминающем устройстве 52 центра 44 управления. Это может быть переменная V, выбранная из группы, состоящей из: данных посадки и/или данных dd высадки, данных cd конфигурации, временных данных td и эксплуатационных данных od. Данные ed посадки и/или данные dd высадки могут представлять собой входную переменную V, выбранную из группы, состоящей из: количества Noi, вида или размера объекта 10, 10’ в подвижной единице 12, количества Noo, вида или размера объекта 10, 10’ вне подвижной единицы 12, количества Nbi препятствий 18 внутри подвижной единицы 12, количества Nbo препятствий 20 вне подвижной единицы 12, количества Nba, вида или размера препятствий 22 у подвижной единицы 12, положения Po объекта 10.
Кроме того, данные cd конфигурации могут представлять собой входную переменную V, выбранную из группы, состоящей из: местоположения Lb, размера или вида препятствий 18, 20, 22, характеристики подвижной единицы 12, характеристики станции 24, 24’, 24’’, 26 подвижной единицы 12. Более того, временные данные td могут представлять собой входную переменную V, выбранную из группы, состоящей из: запланированного времени tsa прибытия подвижной единицы 12 на станцию 24, 24’, 24’’, 26, запланированного времени tsd отправления подвижной единицы 12 со станции 24, 24’, 24’’, 26, фактического времени taa прибытия подвижной единицы 12 на станцию 24, 24’, 24’’, 26, фактического времени tad отправления подвижной единицы 12 со станции 24, 24’, 24’’, 26, предпочтительной продолжительности Dp процесса посадки или процесса высадки. Кроме того, эксплуатационные данные od могут представлять собой входную переменную V, выбранную из группы, состоящей из: скорости vo свободного перемещения объекта 10, скорости vu подвижной единицы 12, скорости vd открытия двери 28, 28’ подвижной единицы 12.
Фактически модель учитывает точную топологию объектов 10, 10’, препятствие(я) 18, 20, 22, подвижную единицу 12 или часть ее (такую как места 68) и/или элемент(ы) или компонент(ы), задействованные в процессе посадки и/или высадки.
Другими словами, входной параметр i может представлять собой:
- расписание поезда, которое указывает на то, сколько времени должна занимать остановка поезда 34 на каждой станции 24, 24’, 24’’, 26, t_расписание (Dp), t_прибытие_по расписанию (tsa), t_фактическое_прибытие (taa), t_отправление_от_станции_по расписанию (tsd), t_фактическое_отправление_от_станции (tad). Эта информация должна быть предоставлена для каждой станции 24, 24’, 24’’, 26, где запланировано прохождение поезда 34. Эту информацию можно получить из расписания и/или текущей ситуации.
- количество (Nba) и местоположение (pb) препятствий 22 в поезде 34. Например, одна или более сломанных дверей 28’, которые заблокированы и не могут открыться. Также могут быть рассмотрены характеристики или параметры препятствия 22 или двери 28’, то есть ширина прохода.
- внутреннюю конфигурацию поезда, то есть топологию вагона поезда 60, положение/местоположение Lb и размер кресел/мест 68 и другие препятствия 20, если они есть, ширину дверей 28, 28’, длину и ширину вагона 60 и т.д. Как правило, эта информация также имеется у производителей поездов или компаний по эксплуатации поездов.
- количество (Noi, Noo) объектов 10 (пассажиров), которые осуществляют посадку в поезд 34 и высадку из него на станции 24, 24’, 24’’, 26. Эта информация может представлять собой исторические данные hd или данные rtd, поступающие в реальном времени, и может быть получена из статистических данных или видеозаписи или от датчика любого типа, который может предоставлять информацию о текущем количестве (Noi, Noo, Nbi, Nbo) пассажиров, которые осуществляют посадку в поезд 34 и высадку из него.
Ниже, в качестве примера, будет подробно описан способ определения D посадки/высадки объекта 10 на станции 24 со ссылкой на фиг. 2-4. Термин "объект" может использоваться взаимозаменяемо с термином "пассажир" или "пешеход".
На первом этапе необходимо провести моделирование для каждой станции 24, 24’, 24’’, 26 и оценку с помощью моделирования относительно того, сколько времени по всей вероятности потребуется объекту 10 или пассажирам для посадки и высадки из поезда 34.
Применение моделирования потока пешеходов является необходимым, так как только с помощью моделирования можно учесть все сложные нелинейные эффекты, такие как нелинейные замедления пешеходов/пассажиров в случае увеличения плотности потока пассажиров.
Как изложено выше, наиболее подходящими моделями для моделирования посадки и высадки из поезда 34 являются либо клеточный автомат, либо модели социальных сил, так как они позволяют моделировать высадку и посадку в поезд 34 на микроскопическом уровне, который является правильным масштабом моделей для моделирования сценариев, например, со сломанными дверями 28’. В данном документе модель клеточного автомата рассматривается в качестве примера. Однако, аналогичным образом можно также применить модель социальных сил.
Описание будет ограничено минимумом, необходимым для применения этой модели. Для получения дополнительной информации смотри работу "Davidich M, Köster G (2013) Predicting Pedestrian Flow: A Methodology and a Proof of Concept Based on Real-Life Data. PLoS ONE 8(12): e83355", которая упоминается в приведенном ниже тексте как "Davidich & Köster 2013".
В модели предполагается, что объект 10 или пассажиры "знают" кратчайший путь (как осуществлять высадку и посадку в поезд 34 через дверь 28 (смотри заштрихованный прямоугольник в правильной ориентации (снизу вверх) на фиг. 3)). Ограниченным видением объекта 10 является пренебрежение, а также неполное знание местности. Пешеходы перемещаются из своих текущих положений (на фиг. 3 источники 55, которые представляют собой, например, четырехугольные зоны 66 для садящихся пассажиров (незаштрихованные кружки), или заключенную в рамку зону 55 или места 68 внутри поезда 34 для высаживающихся пассажиров (незаштрихованные квадраты)) по направлению к отдельным целям 56 (которые на фиг. 3 представляют собой зону справа снаружи дверей 28 для объекта 10, который высаживается из поезда 34, и зону справа после дверей 28 внутри поезда 34 для объекта 10, который входит в поезд 34 (смотри фиг. 2 и 3, заштрихованная зона в правильной ориентации (снизу вверх) внутри поезда 34) для объекта 10, осуществляющего посадку, и удлиненный четырехугольник, контуры которого показаны штриховой линией для объекта 10, осуществляющего высадку) вдоль кратчайшего пути без препятствий, если такой путь не заблокирован "пассивным" объектом 10’ или препятствием 18, 20, соответственно.
Активные объекты 10, а также пассивные объекты 10’ движутся с отдельными предпочтительными скоростями – скорости (vo) свободного перемещения – до тех пор, пока путь будет свободным. Предлагается использовать значения скорости vo свободного перемещения объекта 10 между 1 м/с и 1,5 м/с, предпочтительно между 1,2 м/с и 1,4 м/с и наиболее предпочтительно 1,34 м/с. Более того, предпочтительно она имеет нормальное распределение.
Кроме того, каждый человек нуждается в личном пространстве, которое зависит от его/ее текущей ситуации. Эта потребность выражается в расстояниях, на которых люди пытаются оставаться по отношению друг к другу. Это также заставляет людей держаться на расстоянии от препятствий 18, 20, таких как стены. Поток пешеходов замедляются при увеличении локальной плотности в направлении движения. Это замедление обычно сопровождается так называемой диаграммой Вайдмана, которая описывает то, как поток людей замедляется в случае увеличения плотности потока пешеходов. Для получения дополнительной информации смотри работу "Davidich & Köster 2013".
В модели клеточного автомата используется сетка 14 с ячейками 16. Другими словами, в модели клеточного автомата зона наблюдения 58 представлена в виде решетки с ячейками 16 (смотри фиг. 2). Предлагается использовать шестиугольную сетку 14 для двух дополнительных естественных направлений движения по сравнению с квадратной сеткой. Размер ячейки 16 зависит от среднего значения, относящегося к категории объекта 10. Например, диаметр ячейки d устанавливается равным 53 см для того, чтобы мужчина, принадлежащий к европеоидной расе среднего телосложения, помещался в эту ячейку. Этот параметр можно адаптировать таким образом, чтобы он лучше подходил для пешеходов уроженцев Азии или детей. Каждая ячейка 16 на каждом временном этапе имеет одно из следующих состояний: свободное или занятое объектом 10, препятствием 18, 20 или целью 56.
Далее рассматриваются пространственные размеры и топология. Пешеходы перемещаются в одной плоскости, то есть в двух измерениях. Источники 55 или начальные положения пешеходов и целей 56 имеют параметры трех типов – их положения, расписания появления/исчезновения пешеходов и, для источников 55, также распределения цель-источник, которое позволяет получить вероятности для выбора пунктов назначения пешеходов при появлении пешеходов.
Кроме того, применяется модель "потенциальных полей". Объект 10 (пешеходы), рассматривается(ются) как отрицательно заряженная(ые) частица(ы), называемая(ые) электроном(ами). Объект 10 (пешеходы) притягивается положительными зарядами, такими как выходы, и отталкивается отрицательными зарядами, такими как другие пешеходы/объект 10’ или препятствия 18, 20. Силы, действующие между объектом 10 (пешеходами), целями 56 и препятствиями 18, 20, выражаются через подходящие скалярные функции, потенциалы которых суммируются для образования общего потенциального поля. Для получения дополнительной информации смотри работу "Davidich & Köster 2013".
Препятствиям 18, 20, таким как стены, присваиваются положительные потенциалы, чтобы заставить "людей" предпочтительно держаться на расстоянии друг от друга. Потенциал притяжения большого радиуса действия цели 56 кодируется в поле пола (floor field), которое соответствует времени прибытия фронта волны, распространяющейся с постоянной скоростью от цели 56 через пространство, образованное препятствиями 18, 20 и границами сценария. Для получения дополнительной информации смотри работу "Hartmann D (2010) Adaptive pedestrian dynamics based on geodesics. New J Phys 12: 043032", которая упоминается в приведенном ниже тексте как "Hartmann D 2010".
Это гарантирует, что каждый объект 10, 10’ перемещается по кратчайшему пути к своей цели 56 до тех пор, пока этот путь свободен от других объектов 10’. Возможно также включение групп пешеходов в пути к цели 56 при вычислении поля пола, тем самым добавляя еще один динамический аспект к потенциалу. Для получения дополнительной информации смотри работу "Hartmann D 2010".
Когда виртуальный человек продвигается вперед, он или она выбирает пустую соседнюю ячейку 16 с самым крутым понижением общего потенциала, тем самым успешно уклоняясь от препятствий 18, 20 и других объектов 10’. Отталкивающий потенциал попутного пешехода на кратчайшем пути ведет к уклонению или замедлению.
Динамика моделирования следует определенной схеме последовательного обновления. Каждый человек имеет индивидуальную скорость, то есть скорость vo свободного перемещения, которую он/она пытается достичь и действительно достигает в случае, когда путь свободен. Значение скорости vo свободного перемещения определяет то, как часто будет выбрано соответствующее лицо для обновления: на каждом временном этапе, все лица (объект 10, 10’) идентифицируются таким образом, что им разрешено перемещаться. Более быстро перемещающиеся лица выбираются чаще с тем, чтобы в среднем каждое лицо перемещалось с заданной скоростью до тех пор, пока путь свободен. Положения выбранных пешеходов обновляются в порядке их "периода жизни" при моделировании, то есть времени, прошедшего с момента их появления. Для получения дополнительной информации смотри работу "Davidich & Köster 2013".
Общий подход модели, которая обсуждалась выше, теперь адаптирован к сценарию посадки и/или высадки. Такой общий сценарий настройки для некоторого вагона 60 для некоторой станции 24 показан на фиг. 3. Вычисляется количество Noi, Noo, Nbi, Nbo пассажиров, представляющих собой активный объект 10, и все пассивные объекты 10’, входящие в поезд 34 и выходящие из поезда 34.
В частности, из входного параметра i можно узнать количество Nba и местоположение Lb препятствия 22 или сломанной двери 28’, соответственно. Например, как показано на фиг. 4, количество Nw вагонов 60, местоположения Lb сломанных дверей 28’ или ширина дверей 28’ являются известными. Более того, для каждой станции 24, 24’, 24’’, 26 известно с какой стороны поезда 34 должны открываться двери 28, 28’. В качестве примера на фиг. 4 показаны две сломанные двери 28’, которые обращены к платформе 62 станции 24. Как привило, из статистических данных известно, сколько объектов 10, 10’ или пассажиров осуществляют посадку и высадку из поезда 34 на каждой станции 24, 24’, 24’’, 26. В качестве примера на фиг. 4 это показано с помощью количества Noo_i-Noo_i+6 объектов 10, 10’ в каждом вагоне 60. Пассажиры, осуществляющие посадку и высадку, должны быть равномерно распределены по каждому вагону 60, то есть количество Noo, Nbo объектов 10, 10’ (препятствия 20), или пассажиры, осуществляющие посадку в поезд 34, должны быть распределены по вагонам 60 (ссылочные позиции в формуле изобретения опущены для лучшего представления):
Количество садящихся в поезд пассажиров/количество вагонов =
Количество пассажиров, стремящихся войти в каждый вагон)
и
Количество пассажиров, стремящихся войти в дверь i каждого вагона =
Количество пассажиров, стремящихся войти в каждый вагон/ количество дверей в вагоне на стороне платформы
Иногда распределение между дверями 28, 28’ является неравным (например, большая доля людей пытается войти в головной или хвостовой вагон 60). Если эта информация доступна, то можно учесть это неравномерное распределение, в противном случае, если дополнительная информация отсутствует, то предлагается даже такое распределение, которое описано выше.
Аналогичным образом вычисляется количество Noi, Nbi высаживающихся объектов 10, 10’ (препятствий 18) или пассажиров в вагоне 60:
Количество пассажиров, желающих сойти с поезда на определенной станции/ количество вагонов =
Количество пассажиров, желающих выйти из вагона i
и
Количество пассажиров, стремящихся выйти из двери i каждого вагона =
Количество пассажиров в вагоне i /
Количество работающих дверей в вагоне на стороне платформы
В данном случае предполагается, что, если объект 10 или пассажиры находится/находятся уже внутри поезда 34, то он/они знает/знают, работает или нет дверь 28, 28’, по сравнению с объектом 10 или пассажирами, который/которые ожидает/ожидают на платформе 62 (сначала они предполагают, что все двери 28, 28’ работают).
Имеется также количество Nbi, Nbo пассивных объектов 10’ или пассажиров (например, субъектов 64), находящихся в поезде 34 или на платформе 62, которые не осуществляют высадку и посадку в поезд 34, что также следует принимать во внимание. Обычно известно, сколько объектов 10, 10’ или пассажиров перемещается от станции A (24) до станции B (24’), или сколько пассажиров находится в поезде 34 в определенный момент времени. Исходя из этого, можно оценить количество Nbi, Nbo пассажиров (объекты 10’ или препятствия 18, 20) и распределить их между вагонами 60 так, как описано выше.
Таким образом, для каждой двери 28, 28’ каждого вагона 60 известно количество Noi, Noo, Nbi, Nbo объектов 10’ или препятствий 18, 20 (пассивных объектов 10’) или пассажиров, которые хотят осуществить посадку или высадку из вагона 60. Это показано на фиг. 3 для каждой двери 28, 28’ для объектов 10, 10’, осуществляющих посадку, незаштрихованными кружками и для объектов 10, 10’, осуществляющих высадку, незаштрихованными квадратами. Кроме того, известно количество пассажиров (объектов 10’, субъектов 64), которые едут на поезде 34 и не осуществляют высадку/посадку в поезд 34 на станции 24. На фиг. 3 они показаны в виде незаштрихованных треугольников.
Модель также включает в себя промежуточные цели. Некоторые объекты 10, 10’ или пассажиры хотят войти в поезд 34 через неработающие двери 28’ и встать перед ней (в момент времени t=0). Поскольку можно предположить, что они не знали с самого начала, что эта дверь 28’ не работает, они сначала остаются перед дверью 28’ (смотри на фиг. 3 справа незаштрихованные кружки в четырехугольных зонах 66). Сначала каждый из этих пешеходов получает в качестве промежуточной цели ближайшую к нему рабочую дверь 28. Как только он/она достигает этой рабочей двери 28, он/она получает конечную цель 56 в соответствии с целью 56, назначенной соответствующей двери 28, например, место 68 в вагоне 60. Для получения дополнительной информации смотри работу "Davidich M, Geiss F, Mayer HG, Pfaffnger A, Royer C (2013) Waiting zones for realistic modelling of pedestrian dynamics: A case study using two major german railway stations as examples. Transp Res Part C Emerg Technol Volume 37, December 2013, Pages 210–222", которая упоминается в приведенном ниже тексте как "Davidich M et al. 2013".
Кроме того, для развития сценария учитывается местоположение пассажиров в момент времени t = 0 и их назначение целям 56. Для моделирования поезда ситуация заключается в следующем.
При t=0 объекты 10, 10’ или пассажиры, которые хотят войти в поезд 34, сначала группируются в стороне от дверей 28, 28’ на стороне, где предположительно должны открываться двери 28, 28’ (смотри четырехугольные зоны 66). Обычно люди группируются в равном количестве с каждой стороны двери 28, 28’. Пассажиры, осуществляющие посадку (незаштрихованные кружки), обычно дают время лицам, осуществляющим высадку (незаштрихованные квадраты), и пространство для того, чтобы они вышли из поезда 34 первыми, и только затем перемещаются в направлении их цели 56 (зона с пунктирными линиями в правильной ориентации (снизу вверх) внутри поезда 34), рядом с которой они остаются внутри вагона 60. Однако в данном случае можно было бы учитывать различные культурные проявления, если бы они были известны (например, не дожидаясь, когда все люди высадятся из поезда 34).
Более подробно, входящий объект 10 или пассажиры получает некоторую ячейку 16 в качестве цели 56 в вагоне 60, в который они хотят войти. Эта ячейка 16 является случайной, однако она не должна быть занятой никакими другими пешеходами или препятствием 18, таким как место 68 (прямоугольники, показанные пунктирной линией). Объект 10 или пассажиры, осуществляющие высадку из поезда 34, начинают свое движение первыми (с момента времени t=0). Их первоначальные положения Po объекта 10 или пешеходов находятся рядом с дверями 28 при условии, что их можно достичь при наличии других препятствий 18 и пассивных препятствий 10’, или других пешеходов, которые не осуществляют высадку из поезда 34.
В случае часов пик, когда плотность пассажиров является высокой, пассажиры, которые не осуществляют высадку или посадку в поезд 34, но только едут внутри поезда 34, следует также принимать во внимание, так как они могут препятствовать или блокировать посадку и высадку объекта 10 или пассажиров, особенно при высокой плотности. Их можно учитывать по принципу "зоны ожидания". Для получения дополнительной информации смотри работу "Davidich M et al. 2013". В момент времени t=0 они должны иметь более высокую вероятность получения мест 68 в качестве предпочтительной цели 56, и остальные из них должны быть равномерно распределены по вагону 60.
Объект 10 или пассажиры, которые высаживаются из поезда 34, должны быть распределены таким образом (с момента времени t=0), чтобы они имели более высокую вероятность нахождения рядом с дверью 28, через которую они хотят выйти. Чем ближе местоположение к двери 28, тем выше вероятность того, что объект 10 или пассажир, осуществляющий высадку, будет находиться там.
Объекты 10, 10’, которые высаживаются из поезда 34, размещаются рядом с дверью 28 (смотри заключенную в рамку зону 55, показанную на фиг. 3). Объекты 10, 10’, входящие в поезд 34 размещаются перед дверями 28, 28’ (даже в том случае, если дверь 28’ не работает) (смотри четырехугольные зоны 66). Пассажиры или объекты 64, которые едут на поезде 34, отмечены незаштрихованным треугольником и в основном занимают места 68.
Объект 10, который высаживается из поезда 34, должен получить цель 56 снаружи вагона 60 на некотором расстоянии от двери 28, через которую он осуществляет высадку. Размещение цели 56 на расстоянии поможет имитировать поведение пешеходов и учитывать замедление пешеходов при их высокой плотности, например, имитировать ситуацию, когда объект 10, 10’ или пешеходы, которые осуществляют высадку из поезда 34, сначала могут еще больше замедлить свое движение в случае, когда они оказываются позади них.
Необходимо рассчитать время остановки на каждой станции. Время, необходимое для посадки и высадки из поезда 34, представляет собой отрезок времени, в течение которого все объекты 10, 10’ или пассажиры, которые хотели осуществить высадку из поезда 34, высадились из поезда 34 из всех вагонов 60, и все объекты 10, 10’ или пассажиры, которые хотели осуществить посадку в поезд 34, сели на поезд 34. Если время является разным для различных вагонов 60, самое продолжительное время (продолжительность D) выбирается и сохраняется для каждой станции 24, 24’, 24’’, 26 (i) в виде t_модель_станции_i (продолжительность D_i).
Предпочтительно осуществлять сбор статистических данных. Следовательно, для оценки времени с помощью этого моделирования в идеале один и тот же сценарий должен запускаться много раз для сбора некоторых статистических данных и получения средней продолжительности: t_модель_станции_i_среднее.
Построение сценариев выполняют для каждой станции 24, 24’, 24’’, 26, через которую проходит поезд 34, и вычисляют t_модель_станции_i_среднее для каждой станции 24, 24’, 24’’, 26.
Теперь модель используется для оценки задержки. Поэтому, вычисляется t_стоянка_на_каждой_станции_согласно_расписанию_по_станции_i. Таким образом, вычисляется время (продолжительность D), которое необходимо на каждой станции i (24, 24’, 24’’, 26) для сменяемости объектов 10, 10’ или пассажиров.
Из расписания можно вычислить: t_стоянка_на_каждой_станции_согласно_расписанию_по_станции_i = t_отправление_по_расписанию_от_станции_i – t_прибытия_по_расписанию_на_станцию_i.
На этот раз: t_стоянки_на_каждой_станции_согласно_расписанию_по_станции_i следует сравнить с t_моделирование_станция_i_среднее.
Предполагается, что поезд 34 не может сократить время движения между станциями 24, 24’, 24’’, 26. Это справедливо для пригородных поездов и поездов 34 метрополитена, которые имеют относительно короткие расстояния между станциями 24, 24’, 24’’, 26, и для этих поездов задержки Y на станциях 24, 24’, 24’’, 26 из-за неработающей двери 28’ становятся критичными.
Следовательно, способ можно использовать для определения задержки Y подвижной единицы 12 на станции 24, 24’, 24’’, 26. Задержку Y можно определить путем:
сравнения определенной продолжительности D для процесса посадки и/или высадки с заданной продолжительностью Dps для процесса посадки и/или высадки, которая, например, хранится в запоминающем устройстве 52 центра 44 управления. Если определенная продолжительность D для процесса посадки и/или высадки является более продолжительной, чем заданная продолжительность Dps для процесса посадки и/или высадки, то разность между определенной продолжительностью D для процесса посадки и/или высадки и заданной продолжительностью Dps для процесса посадки и/или высадки равна задержке Y подвижной единицы 12 на станции 24, 24’, 24’’, 26.
Способ можно также использовать для определения общей задержки Yt подвижной единицы 12, исходя из расстояния 38 перемещения. Определение общей задержки Yt подвижной единицы 12 на расстоянии 38 перемещения на конечной станции 26 основывается на накоплении задержек Y на соответствующих нескольких станциях 24, 24’, 24’’ и на конечной станции 26.
В развернутой форме:
Сначала t_суммарная_задержка_i = 0,
Для всех i=1... N (где N – количество станций)
Затем для всех станций от станции 1 до станции N
Если t_моделирование_станции_i_среднее > t_стоянки_на_каждой_станции_согласно_расписанию_по_станции_i,
то
t_моделирование_станции_i_среднее - t_стоянки_на_каждой_станции_согласно_расписанию_по_станции_i = t_задержки_i
t_задержки_суммарное_i = t_задержки_суммарное_i-1+t_задержки_i
то есть задержки Y за счет различных станций 24, 24’, 24’’, 26 суммируются последовательно.
2. Если t_моделирование_станция_i_среднее = t_стоянки_на_каждой_станции_согласно_расписанию_по_станции_i,
то задержка = 0 (на этой станции задержка отсутствует)
3. Если t_моделирование_станция_i_среднее < t_стоянки_на_каждой_станции_согласно_расписанию_по_станции_i,
то,
если на предыдущих станциях 24, 24’, 24’’ уже были задержки Y (t_задержки_суммарное_i-1> 0),
то есть t_моделирование_станция_i_среднее > t_стоянки_на_каждой_станции_согласно_расписанию_по_станции_i, и
t_отправления_фактическое > t_отправления_по _расписанию,
то можно уменьшить задержку Y на этой станции
t_задержки_суммарное = t_задержки_суммарное - (t_стоянко_на_каждой_станции_согласно_расписанию_по_станции_i - t_моделирование_станция_i_среднее),
где
t_отправления_фактическое является фактическим временем (tad) отправления, которое можно вычислить следующим образом:
t_отправления_фактическое = t_отправления_по_расписанию + t_задержки_суммарное_i-1
или задержка = 0 t_задержки_суммарное_i = t_задержки_суммарное_i-1 не изменяется для этой станции 24, 24’, 24’’, 26 (так как поезд 34 не может отправиться раньше, чем указано в расписании).
В данном случае учитываются два момента. Во-первых, поезд 34 не может покинуть станцию 24, 24’, 24’’ раньше расписания.
Во-вторых, если раньше уже была задержка Y, так что реальное время (tad) отправления было позже время (tsd) отправления по расписанию, поезд 34 может уменьшить задержку Y.
Таким образом, проезжая через каждую станцию 24, 24’, 24’’, 26 многократно вычисляется delay_sum, то есть общая задержка Yt. Другими словами, все дельты для всех станций 24, 24’, 24’’, 26 суммируются (и принимается во внимание то, была или нет возможность уменьшить задержку Y).
Этот алгоритм можно также модифицировать для оценки в реальном времени общей задержки Yt на основании текущей ситуации. Для этого в идеале текущий входной параметр i должен быть выбран из анализа видео или сигналов датчиков любого другого типа, которые должны предоставлять информацию относительно того, сколько объектов 10, 10’ или людей хотят войти в поезд 34. Оценка высадки из поезда 34 является такой же, как описано выше. В этом случае можно учитывать не только запланированное время tsa, tsd поезда 34 (когда поезд 34 должен прибыть на станцию 24, 24’, 24’’, 26 и отправиться с нее), но также действительное время taa, tad прибытия (вместо запланированного времени), и можно принять во внимание, что поезд 34 не может отправиться раньше запланированного времени tsd. Принимая во внимание эти изменения, можно легко смоделировать текущие задержки Y на каждой станции 24, 24’, 24’’, 26 и предсказать общую задержку Yt поезда 34, так как время выполнения моделирования на обычном PC для сценария этого типа составляет обычно менее секунды, поэтому предсказание является возможным.
Таким образом, способ можно использовать для прогнозирования в реальном времени задержки Y и/или общей задержки Yt, причем определение задержки Y и/или общей задержки Yt основано на данных rtd, поступающих в реальном времени, в качестве входного параметра i для пространственной целенаправленной динамической модели. Кроме того, способ можно использовать для автономного моделирования задержки Y и/или общей задержки Yt, причем определение задержки Y и/или общей задержки Yt основано на исторических данных hd в качестве входного параметра i для пространственной целенаправленной динамической модели.
Более того, изобретение описывает способ обучения пространственной целенаправленной динамической модели. Этот способ обучения содержит следующие этапы: предоставление набора Tds данных обучения, которые содержат множество данных Td обучения, причем данные обучения содержат продолжительность D процесса посадки и/или процесса высадки автономного подвижного объекта 10, осуществляющего посадку и/или высадку из подвижной единицы 12, и дополнительно данные Td обучения выбираются из группы, состоящей из: данных ed посадки, и/или данных dd высадки, и/или данных cd конфигурации, и/или временных данных td и/или эксплуатационных данных od. Эти данные могут представлять собой любую входную переменную V, раскрытую выше.
Наконец, способ обучения содержит этап: обучения модели с использованием набора Tds данных обучения, в котором адаптирован по меньшей мере один параметр модели.
Следовательно, способ согласно изобретению описывает путь, на котором можно рассчитать заранее задержку(и) Y из-за сломанной(ых) двери(ей) 28’. В частности, он раскрывает моделирование сценария высадки и посадки и применение алгоритма, полученного при моделировании.
Таким образом, в изобретении предложена, в качестве примерного краткого изложения эксплуатации поезда 34 со сломанной дверью 28’:
идея применения модели потока пешеходов для вычисления задержки Y поезда 34 из-за сломанной двери 28’.
Конкретное описание того, как следует применять модель потока пешеходов, включает в себя:
то, какие использовать типы пространственных целенаправленных динамических моделей;
то, как модифицировать известные статистические данные о пассажирских потоках в сценарии моделирования;
то, как осуществить построение конкретного сценария для определенной станции 24, 24’, 24’’, 26 или остановки, которая отражала бы реальную ситуацию сменяемости пассажиров, включая параметры, явления и все начальные условия для моделирования, которые следует учитывать.
То, как оценить среднюю продолжительность сменяемости пассажиров (для посадки и высадки из поезда 34) с помощью моделирования.
Алгоритм того, как вычислить общую задержку Yt поезда 34 со сломанной дверью 28’ для автономных сценариев и сценариев в реальном времени.
Следует отметить, что термин "содержащий" не исключает других элементов или этапов, а употребление в тексте существительных в единственном числе не исключает их множественное число. Кроме того, можно объединить элементы, описанные в связи с различными вариантами осуществления. Следует также отметить, что ссылочные позиции в формуле изобретения не должны быть истолкованы как ограничивающие объем формулы изобретения.
Хотя изобретение проиллюстрировано и подробно описано посредством предпочтительных вариантов осуществления, изобретение не ограничивается раскрытыми примерами, и другие варианты могут быть получены от них специалистом в данной области без отклонения от объема настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХЭТАЖНЫЙ ВАГОН ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2467900C2 |
| Устройство для безостановочного движения поездов пассажирского пневмотранспорта | 2015 |
|
RU2613636C1 |
| КОНСТРУКЦИЯ ВАГОНА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА И ЖЕЛЕЗНОДОРОЖНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2017 |
|
RU2723194C1 |
| ПАВИЛЬОН ДЛЯ ОЖИДАНИЯ И ПОСАДКИ И ВЫСАДКИ ПАССАЖИРОВ ГОРОДСКОГО ОБЩЕСТВЕННОГО ТРАНСПОРТА | 2000 |
|
RU2250332C2 |
| Трехпролетная станция метрополитена открытого способа производства работ с островным расположением пассажирской платформы и однопутными перегонными тоннелями | 2019 |
|
RU2746610C1 |
| МОДУЛЬНАЯ ТРАНСПОРТНАЯ СИСТЕМА И СПОСОБ ЕЕ ЭКСПЛУАТАЦИИ | 2001 |
|
RU2205761C1 |
| СПОСОБ ДВИЖЕНИЯ ПОЕЗДОВ ПАССАЖИРСКОГО ПНЕВМОТРАНСПОРТА | 2014 |
|
RU2559871C1 |
| Автоматизированная система контроля мотор-вагонного подвижного состава | 2021 |
|
RU2774509C1 |
| Способ безостановочного движения поездов пневмотранспорта | 2015 |
|
RU2613638C2 |
| СПЕЦИАЛИЗИРОВАННОЕ НАДЗЕМНОЕ СРЕДСТВО ОБЩЕСТВЕННОГО ТРАНСПОРТА | 2014 |
|
RU2682122C2 |
Изобретение относится к области управления на железнодорожном транспорте для определения продолжительности (D) процесса посадки и высадки. В способе определяют продолжительность (D) процесса посадки и/или процесса высадки по меньшей мере одного автономного подвижного объекта (10), осуществляющего посадку и/или высадку из подвижной единицы (12), с использованием модели, описывающей процесс посадки и/или процесс высадки по меньшей мере одного автономного подвижного объекта (10), осуществляющего посадку и/или высадку из подвижной единицы (12) при дискретном динамичном перемещении в пространстве, причем модель обрабатывает по меньшей мере один входной параметр (i), причем входной параметр (i) является переменной (V), выбранной из группы, состоящей из: данных (ed, dd) посадки и/или высадки, данных (cd) конфигурации, временных данных (td) и эксплуатационных данных (od). Достигается повышение точности и безопасности движения. 3 н. и 11 з.п. ф-лы, 4 ил.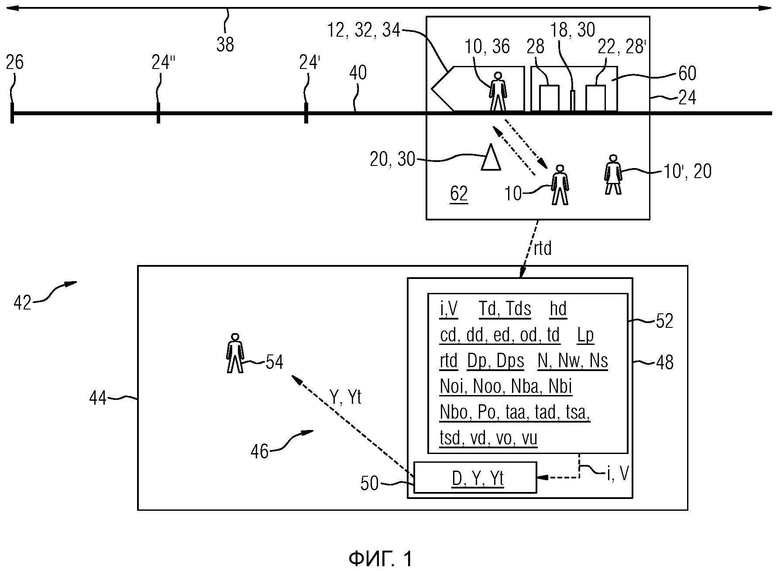
1. Способ определения продолжительности (D) процесса посадки и/или процесса высадки по меньшей мере одного автономного подвижного объекта (10), перемещаемого подвижной единицей (12), причем
способ содержит этап, на котором:
определяют продолжительность (D) процесса посадки и/или процесса высадки по меньшей мере одного автономного подвижного объекта (10), осуществляющего посадку и/или высадку из подвижной единицы (12), с использованием модели, описывающей процесс посадки и/или процесс высадки по меньшей мере одного автономного подвижного объекта (10), осуществляющего посадку и/или высадку из подвижной единицы (12) при дискретном динамичном перемещении в пространстве, причем модель обрабатывает по меньшей мере один входной параметр (i), причем входной параметр (i) является переменной (V), выбранной из группы, состоящей из: данных (ed, dd) посадки и/или высадки, данных (cd) конфигурации, временных данных (td) и эксплуатационных данных (od).
2. Способ по п. 1, в котором модель посадки и/или высадки является моделью, выбранной из группы, состоящей из: модели клеточного автомата и модели социальных сил.
3. Способ по п. 2, в котором модель клеточного автомата использует сетку (14) по меньшей мере с одной ячейкой (16), причем размер указанной по меньшей мере одной ячейки (16) зависит от среднего значения, относящегося к категории указанного по меньшей мере одного автономного подвижного объекта (10).
4. Способ по п. 2 или 3, в котором модель клеточного автомата использует шестиугольную сетку (14) по меньшей мере с одной ячейкой (16), имеющей диаметр ячейки (d) 53 см, и/или модель клеточного автомата использует двухмерную плоскость.
5. Способ по п. 1,
в котором данные (ed, dd) посадки и/или высадки представляют собой входную переменную (V), выбранную из группы, состоящей из: количества (Noi), вида или размера объектов (10) внутри подвижной единицы (12), количества (Noo), вида или размера объектов (10) вне подвижной единицы (12), количества (Nbi) препятствий (18) внутри подвижной единицы (12), количества (Nbo) препятствий (20) вне подвижной единицы (12), количества (Nba), вида или размера препятствий (22) у подвижной единицы (12), положения (Po) объекта (10),
при этом данные (cd) конфигурации представляют собой входную переменную (V), выбранную из группы, состоящей из: местоположения (Lb), размера или вида препятствия (18, 20, 22), характеристики подвижной единицы (12), характеристики станции (24, 24’, 24’’, 26) подвижной единицы (12),
временные данные (td) представляют собой входную переменную (V), выбранную из группы, состоящей из: времени (tsa) прибытия подвижной единицы (12) на станцию (24, 24’, 24’’, 26) по расписанию, времени (tsd) отправления подвижной единицы (12) со станции (24, 24’, 24’’, 26) по расписанию, фактического времени (taa) прибытия подвижной единицы (12) на станцию (24, 24’, 24’’, 26), фактического времени (tad) отправления подвижной единицы (12) со станции (24, 24’, 24’’, 26), предпочтительной продолжительности (Dp) процесса посадки или процесса высадки,
эксплуатационные данные (od) представляют собой входную переменную (V), выбранную из группы, состоящей из: скорости (vo) свободного перемещения объекта (10), скорости (vu) подвижной единицы (12), скорости (vd) открывания двери (28, 28’) подвижной единицы (12).
6. Способ по п. 5, в котором скорость (vo) свободного перемещения по меньшей мере одного автономного подвижного объекта (10) находится между 1 м/с и 1,5 м/с, предпочтительно между 1,2 м/с и 1,4 м/с и наиболее предпочтительно 1,34 м/с.
7. Способ по п. 5, в котором препятствие (18, 20) представляет собой другой автономный подвижный объект (10’), неподвижный элемент (30) и, особенно, препятствие (22) в подвижной единице (12) является сломанной дверью (28’).
8. Способ по любому из пп. 1-7, в котором подвижная единица (12) является рельсовым транспортным средством (32), особенно, поездом (34).
9. Способ по любому из пп. 1-8, в котором указанный по меньшей мере один автономный подвижный объект (10, 10’) является объектом (10, 10’), выбранным из группы, состоящей из: человека (36), животного, робота и транспортного средства.
10. Применение способа по любому из пп. 1-9 для определения задержки (Y) подвижной единицы (12) на станции (24, 24’, 24’’, 26) подвижной единицы (12), причем процесс посадки и/или процесс высадки происходит на станции (24, 24’, 24’’, 26) и характеризуется тем, что задержка (Y) определяется путем:
сравнения определенной продолжительности (D) процесса посадки и/или процесса высадки с заданной продолжительностью (Dps) процесса посадки и/или процесса высадки и
если определенная продолжительность (D) процесса посадки и/или процесса высадки является более продолжительной, чем заданная продолжительность (Dps) процесса посадки и/или процесса высадки, то разность между определенной продолжительностью (D) процесса посадки и/или процесса высадки и заданной продолжительностью (Dps) процесса посадки и/или процесса высадки равна задержке (Y) подвижной единицы (12) на станции (24, 24’, 24’’, 26).
11. Применение по п. 10 для определения общей задержки (Yt) подвижной единицы (12) на расстоянии (38) поездки подвижной единицы (12), в котором расстояние (38) поездки проходит через несколько станций (24, 24’, 24’’) до конечной станции (26) подвижной единицы (12), при этом определение общей задержки (Yt) подвижной единицы (12) на расстоянии (38) поездки до конечной станции (26) основывается на накоплении задержек (Y) на соответствующих нескольких станциях (24, 24’, 24’’) и на конечной станции (26).
12. Применение по п. 10 или 11 для прогнозирования в реальном времени задержки (Y) и/или общей задержки (Yt), в котором определение задержки (Y) и/или общей задержки (Yt) основано на данных (rtd), поступающих в реальном времени, в качестве входных данных (i) для пространственной дискретной динамической модели.
13. Применение по п. 10 или 11 для автономного моделирования задержки (Y) и/или общей задержки (Yt), в котором определение задержки (Y) и/или общей задержки (Yt) основано на исторических данных (hd), используемых в качестве входных данных (i) для пространственной дискретной динамической модели.
14. Способ обучения пространственной дискретной динамической модели, в частности, пространственной дискретной динамической модели по меньшей мере по одному из пп. 1-9, содержащий по меньшей мере следующие этапы, на которых:
предоставляют набор (Tds) обучающих данных, содержащий множество обучающих данных (Td),
причем обучающие данные (Td) содержат продолжительность (D) процесса посадки и/или процесса высадки по меньшей мере одного автономного подвижного объекта (10), осуществляющего посадку и/или высадку из подвижной единицы (12), и
дополнительно обучающие данные (Td) выбираются из группы, состоящей из:
данных (ed, dd) посадки и/или высадки, и/или
данных (cd) конфигурации, и/или
временных данных (td), и/или
эксплуатационных данных (od), и/или,
в частности,
данных (ed, dd) посадки и/или высадки по п.5, и/или
данных (cd) конфигурации по п.5, и/или
временных данных (td) по п.5, и/или
эксплуатационных данных (od) по п.5, и
обучают модель с использованием набора обучающих данных (Tds), причем по меньшей мере один параметр модели является адаптированным.
| CN106529001 A, 22.03.2017 | |||
| ГЕНЕРАТОР ВЕНТИЛЬНОГО ТИПА | 2011 |
|
RU2469455C2 |
| ГЕНЕРАТОР ВЕНТИЛЬНОГО ТИПА | 2011 |
|
RU2469455C2 |
| ПОДЗЕМНЫЙ РАЗБУРИВАТЕЛЬ | 2011 |
|
RU2592586C2 |
| ГАЗОГЕНЕРИРУЮЩИЙ СОСТАВ | 2009 |
|
RU2388737C1 |

