Микрооптоэлектромеханический датчик предназначен для измерения угловой скорости подвижных объектов, и может быть использован, например, в системах управления самолетов, кораблей, автомобилей и прочих.
Известен «Микромеханический гироскоп» (патент № 2400706, МПК G01C 19/56 (2006/01), опубликован 27.09.2010 г.), выбранный в качестве прототипа, выполненный на диэлектрической подложке, содержащий опорные элементы, закрепленные на подложке с противоположных сторон, рамку, расположенную с зазором относительно подложки и связанную с опорными элементами через упругие перемычки, инерционную массу, расположенную с зазором относительно подложки и связанную с рамкой через упругие элементы, раму, расположенную внутри инерционной массы с зазором относительно подложки и связанную с инерционной массой через дополнительные упругие перемычки, систему возбуждения колебаний, состоящую из неподвижных электродов, закрепленных на подложке, и подвижных электродов, выполненных в раме, систему емкостного съема выходных колебаний, состоящую из неподвижных электродов, закрепленных на подложке, и подвижных электродов, выполненных в инерционной массе
Принцип действия данного датчика основан на измерении емкости между электродами съема выходных колебаний, возникающих из-за воздействия угловой скорости на инерционную массу.
Недостатком датчика является низкая чувствительность, связанная с его высокой шумовой характеристикой, вызванной единой физической природой системы съема выходных колебаний и системы возбуждения колебаний, и как следствие, малая величина детектируемого сигнала.
Целью настоящего изобретения является разработка датчика с высокой чувствительностью.
Техническим результатом предлагаемого изобретения является повышение чувствительности датчика.
Заявленный технический результат достигается тем, что в известном микрооптоэлектромеханическом датчике угловой скорости, содержащем подложку из диэлектрического материала, рамку, расположенную с зазором относительно подложки и связанную с опорными элементами, инерционную массу, расположенную с зазором относительно подложки и связанную с рамкой через упругие элементы, систему возбуждения колебаний, состоящую из неподвижных электродов, закрепленных на подложке, и подвижных электродов, закрепленных на внешней стороне рамки, и системы съема выходных колебаний, согласно заявляемому изобретению, система съема выходных колебаний выполнена в виде двух узлов оптического считывания, расположенных на подложке напротив середины свободных от электродов сторон рамки, каждый из которых содержит источник оптического излучения, оптический модулятор и два фотоприемника, связанные по оптическому лучу, выходы фотоприемников соединены со входами блока обработки, при этом, каждый из оптических модуляторов выполнен в виде двух призм полного внутреннего отражения, поверхности отражения которых расположены под углом 90° друг к другу, и клиновидного оптического элемента, закрепленного на наружной стороне рамки напротив призм полного внутреннего отражения, причем величина симметричных зазоров между поверхностями отражения призм полного внутреннего отражения и гранями клиновидного оптического элемента является равномерной и не превышает величину длины волны источника оптического излучения.
В частном случае на поверхность клиновидного оптического элемента может быть нанесено тонкопленочное покрытие диоксида кремния.
В частном случае каждая призма полного внутреннего отражения выполнена по планарной технологии из диоксида кремния.
Благодаря использованию оптического метода для съема выходных колебаний на основе оптического туннельного эффекта, повышается помехозащищенность датчика, т.к. в системе возбуждения колебаний и системы съема выходных колебаний используются сигналы различной физической природы, и, как следствие, происходит повышение чувствительности датчика.
Сущность изобретения поясняется чертежами.
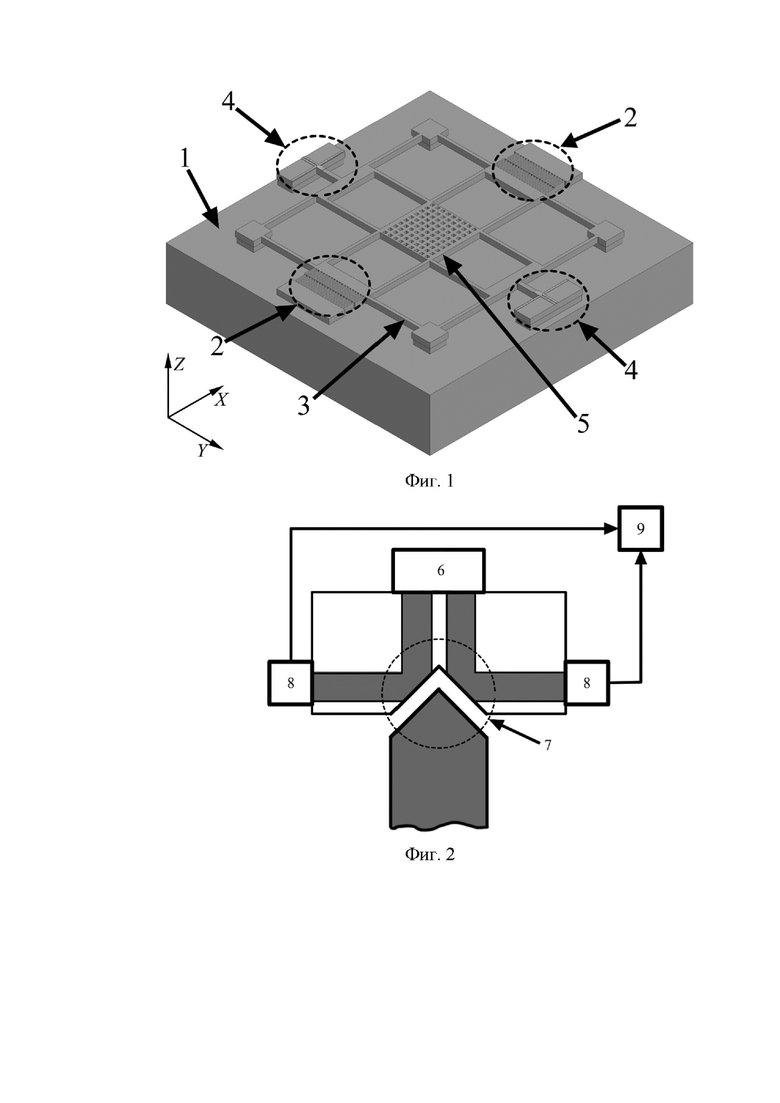
На фиг. 1 показана конструкция предлагаемого микрооптоэлектромеханического датчика угловой скорости. Предлагаемый датчик содержит подложку из диэлектрического материала 1, систему возбуждения колебаний 2, рамку 3, узлы оптического считывания 4, инерциальную массу 5.
На фиг. 2 показана конструкция узла оптического считывания 4 и связь с блоком обработки 9. Узел оптического считывания 4 содержит источник оптического излучения 6, оптический модулятор 7, фотоприемники 8, связанные по оптическому лучу. Выходы фотоприемников соединены со входами блока обработки 9.
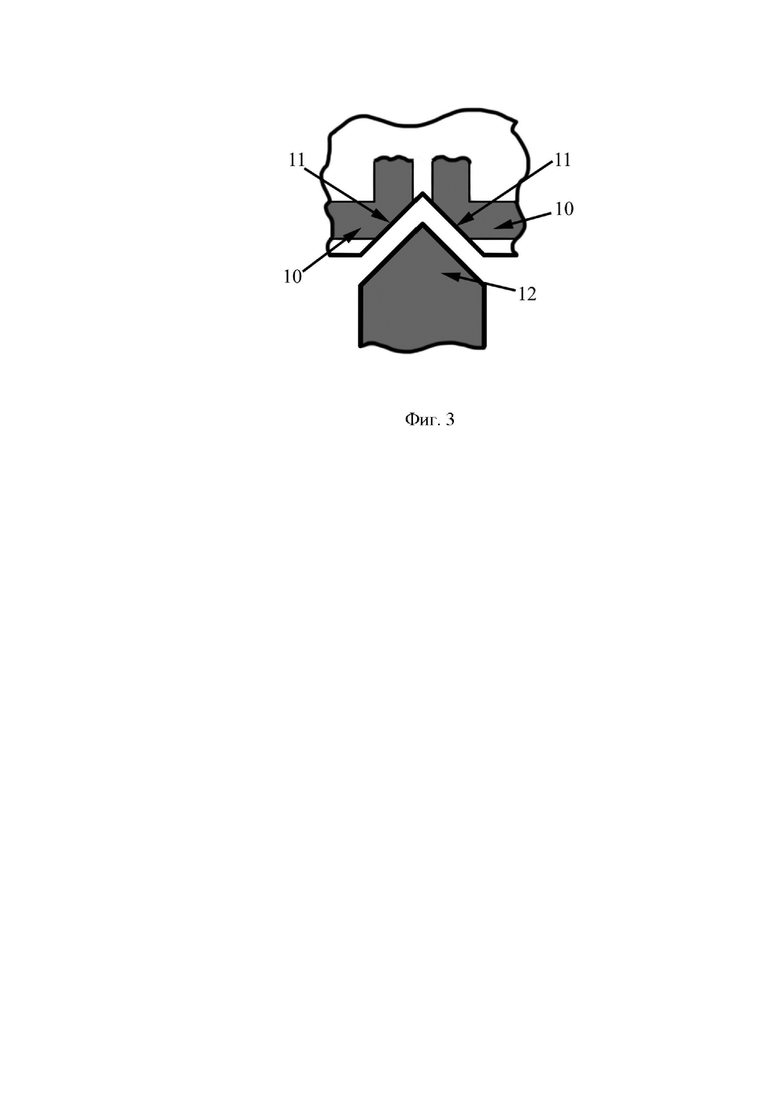
На фиг. 3 показана конструкция оптического модулятора 7. Оптический модулятор 7, выполнен в виде двух призм полного внутреннего отражения 10, выполненных по планарной технологии из диоксида кремния, поверхности отражения 11 которых расположены под углом 90° друг к другу, и клиновидного оптического элемента 12, закрепленного на наружной стороне рамки 3 напротив призм полного внутреннего отражения 10, причем величина симметричных зазоров между поверхностями отражения 11 призм полного внутреннего отражения 10 и гранями клиновидного оптического элемента 12 является равномерной и не превышает величину длины волны источника оптического излучения. На поверхности клиновидного оптического элемента 12 имеется покрытие из диоксида кремния.
Предлагаемый микрооптоэлектромеханический датчик угловой скорости содержит подложку 1 из диэлектрического материала, рамку 3, расположенную с зазором относительно подложки 1 и связанную с опорными элементами, инерционную массу 5, расположенную с зазором относительно подложки 1 и связанную с рамкой 3 через упругие элементы. Систему возбуждения колебаний, состоящую из неподвижных электродов, закрепленных на подложке 1, и подвижных электродов, закрепленных на внешней стороне, два узла оптического считывания 4, содержащие источник оптического излучения 6, оптический модулятор 7, два фотоприемника 8, связанные по оптическому лучу. Каждый оптический модулятор 7, детектирующий колебания, индуцированные инерциальными смещениями, выполнен в виде двух призм полного внутреннего отражения 10, поверхности отражения 11 которых расположены под углом 90° друг к другу, и клиновидного оптического элемента 12, закрепленного на наружной стороне рамки напротив призм полного внутреннего отражения 10, причем величина симметричных зазоров между отражающими поверхностями 11 призм полного внутреннего отражения 10 и гранями клиновидного оптического элемента 12 является равномерной и не превышает величину длины волны источника оптического излучения. На поверхности клиновидного оптического элемента 12 имеется тонкопленочное покрытие диоксида кремния, а призмы полного внутреннего отражения 10 выполнены по планарной технологии из диоксида кремния.
Устройство работает следующим образом. Первичные колебания рамки 3 вдоль оси OX создаются путем приложения переменного напряжения к системе возбуждения колебаний 2, соответствующей резонансной частоте колебаний рамки 3. В отсутствие угловой скорости, амплитуда колебаний рамки вдоль оси OY равна нулю. При внешнем вращении с угловой скоростью Ω вокруг оси OZ возникает сила Кориолиса, формирующая вторичные колебания рамки 3 вдоль оси OY. Амплитуда колебаний рамки 3 вдоль оси OY пропорциональна Ω. Эти колебания детектируются узлами оптического считывания 4. При этом, равномерный зазор между клиновидным оптическим элементом 12 и двумя призмами внутреннего отражения 10 изменяется по гармоническому закону. Изменение величины равномерного зазора приводит к изменению отражательной способности области, разделяющей поверхности отражения 11 призм полного внутреннего отражения 10 и клиновидного оптического элемента 12, что приводит к изменению мощности оптического излучения, поступающего на фотоприемник 8, и затем, после детектирования к формированию электрического сигнала, используемого в блоке обработки 9.
Таким образом, изобретение может быть использовано для измерения угловой скорости объекта с повышенными помехозащищенностью и чувствительностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| Компенсационный микрооптоэлектромеханический датчик угловой скорости | 2023 |
|
RU2806242C1 |
| Компенсационный микрооптоэлектромеханический преобразователь линейного ускорения с магнитолевитирующим чувствительным элементом | 2024 |
|
RU2833178C1 |
| ОПТОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ МИКРОДАТЧИК | 2020 |
|
RU2739829C1 |
| ЛИДАР | 2020 |
|
RU2759260C1 |
| Микро-опто-электро-механический датчик угловой скорости на основе волнового твердотельного гироскопа с кольцевым резонатором и оптического туннельного эффекта | 2016 |
|
RU2641507C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ МОД ПЛАНАРНЫХ ОПТИЧЕСКИХ ВОЛНОВОДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2022247C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2008 |
|
RU2400706C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ БИОЛОГИЧЕСКИХ, БИОХИМИЧЕСКИХ, ХИМИЧЕСКИХ ИЛИ ФИЗИЧЕСКИХ ПАРАМЕТРОВ СРЕДЫ | 1993 |
|
RU2021591C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВНЕШНЕГО ВОЗДЕЙСТВИЯ НА СРЕДУ ИЛИ ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2021590C1 |
| КОСМИЧЕСКИЙ ИЗМЕРИТЕЛЬ ПРИРАЩЕНИЯ СКОРОСТИ | 2012 |
|
RU2524687C2 |
Микроптоэлектромеханический датчик угловой скорости предназначен для измерения угловой скорости подвижных объектов и может быть использован, например, в системах управления самолетов, кораблей, автомобилей и прочих. Предлагаемый датчик включает подложку из диэлектрического материала, рамку, расположенную с зазором относительно подложки, связанную с опорными элементами, и инерционную массу, расположенную с зазором относительно подложки и связанную с рамкой через упругие элементы. Система возбуждения колебаний состоит из неподвижных электродов, закрепленных на подложке, и подвижных электродов, закрепленных на внешней стороне рамки, системы съема информации, состоящей из двух узлов оптического считывания, источника оптического излучения, фотоприемников, оптического модулятора, выполненного в виде двух призм полного внутреннего отражения, поверхности отражения которых расположены под углом 90° друг к другу, и клиновидного оптического элемента, закрепленного на наружной стороне рамки напротив призм полного внутреннего отражения. Величина симметричных зазоров между отражающими поверхностями призм полного внутреннего отражения и гранями клиновидного оптического элемента является равномерной и не превышает величину длины волны источника оптического излучения. На поверхности каждого клиновидного оптического элемента имеется покрытие из диоксида кремния, и каждая призма полного внутреннего отражения выполнена по планарной технологии из диоксида кремния. Технический результат - повышение помехозащищенности и чувствительности. 2 з.п. ф-лы, 3 ил.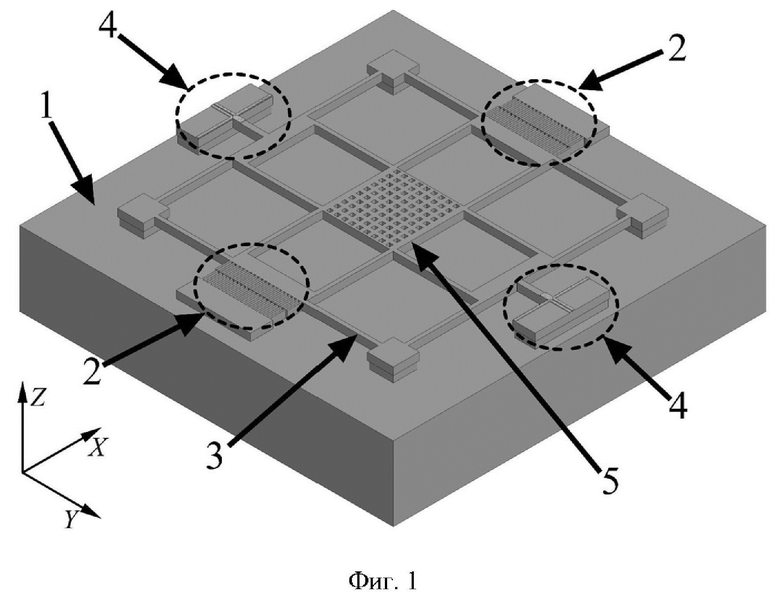
1. Микрооптоэлектромеханический датчик угловой скорости, содержащий подложку из диэлектрического материала, рамку, расположенную с зазором относительно подложки и связанную с опорными элементами, инерционную массу, расположенную с зазором относительно подложки и связанную с рамкой через упругие элементы, систему возбуждения колебаний, состоящую из неподвижных электродов, закрепленных на подложке, и подвижных электродов, закрепленных на внешней стороне рамки, и системы съема выходных колебаний, отличающийся тем, что система съема выходных колебаний выполнена в виде двух узлов оптического считывания, расположенных на подложке напротив середины свободных от электродов сторон рамки, каждый из которых содержит источник оптического излучения, оптический модулятор и два фотоприемника, связанные по оптическому лучу, выходы фотоприемников соединены с входами блока обработки, при этом каждый из оптических модуляторов выполнен в виде двух призм полного внутреннего отражения, поверхности отражения которых расположены под углом 90° друг к другу, и клиновидного оптического элемента, закрепленного на наружной стороне рамки напротив призм полного внутреннего отражения, причем величина симметричных зазоров между поверхностями отражения призм полного внутреннего отражения и гранями клиновидного оптического элемента является равномерной и не превышает величину длины волны источника оптического излучения.
2. Микрооптоэлектромеханический датчик угловой скорости по п. 1, отличающийся тем, что на поверхность клиновидного оптического элемента нанесено тонкопленочное покрытие диоксида кремния.
3. Микрооптоэлектромеханический датчик угловой скорости по п. 1, отличающийся тем, что каждая призма полного внутреннего отражения выполнена по планарной технологии из диоксида кремния.
| RU 98120397 A, 27.08.2000 | |||
| CN 202836572 U, 27.03.2013 | |||
| ВОЛОКОННО-ОПТИЧЕСКИЙ ГИРОСКОП | 2015 |
|
RU2589450C1 |
| CN 202836572 U, 27.03.2013. | |||

