Предлагаемое изобретение относится к области измерительной техники, а более конкретно к измерительным элементам угловой скорости.
Известен микромеханический гироскоп [В.Я.Распопов, Микромеханические приборы. Учебное пособие, 2-е изд., Тул. гос. университет, Московский гос. технологический университет им. К.Э.Циолковского, Тула, 2004, стр.337, рис.5.9], содержащий подложку из диэлектрического материала, опорные элементы (анкеры), закрепленные на подложке с противоположных сторон, рамку, расположенную с зазором относительно подложки и связанную с опорными элементами через упругие перемычки (элементы), инерционную массу (чувствительный элемент), расположенную с зазором относительно подложки и связанную с рамкой через упругие элементы, систему возбуждения колебаний (двигатели), состоящую из неподвижных электродов, закрепленных на подложке, и подвижных электродов, систему емкостного съема выходных колебаний (датчики перемещений), состоящую из неподвижных электродов, закрепленных на подложке, и подвижных электродов, выполненных в инерционной массе (чувствительном элементе).
Подвижные электроды системы возбуждения колебаний (двигателей) выполнены в рамке.
При подаче на неподвижные электроды системы возбуждения колебаний (двигателей) переменного напряжения, относительно подвижных электродов системы возбуждения колебаний (двигателей), между ними возникнет электростатическое взаимодействие, что приведет к возникновению первичных колебаний рамки в направлении оси X, расположенной в плоскости подложки. Колебания рамки через упругие перемычки (элементы) передаются инерционной массе (чувствительному элементу). При возникновении вращения подложки вокруг оси Z, направленной перпендикулярно плоскости подложки, инерционная масса (чувствительный элемент) под действием сил Кориолиса начнет совершать вторичные колебания в направлении оси Y, расположенной в плоскости подложки. Вторичные колебания инерционной массы (чувствительного элемента) приведут к изменению емкостей между электродами системы емкостного съема выходных колебаний (датчиков перемещений), которые характеризуют величину действующей угловой скорости.
Это техническое решение является наиболее близким по технической сущности и решаемой задаче к заявляемому объекту, поэтому выбрано в качестве прототипа.
Данный гироскоп позволяет измерять величину угловой скорости при вращении его вокруг оси Z, перпендикулярной плоскости подложки.
Недостатки конструкции данного гироскопа:
- отсутствие элементов развязки первичных и вторичных колебаний, что приводит к влиянию сил, создаваемых системой возбуждения колебаний (двигателей), на вторичные колебания инерционной массы (чувствительного элемента) и, следовательно, уменьшению точности измерения угловой скорости;
- отсутствие элементов, предотвращающих замыкание электродов системы возбуждения колебаний (двигателей) и электродов системы емкостного съема выходных колебаний (датчиков перемещений), что ведет к уменьшению надежности работы микромеханического гироскопа при действии ударов большой интенсивности.
Задача предлагаемого изобретения - увеличение точности измерения угловой скорости и увеличение надежности работы микромеханического гироскопа в условиях действия ударов большой интенсивности.
Технический результат, достигнутый при осуществлении предлагаемого изобретения, заключается:
- в развязке первичных и вторичных колебаний инерционной массы, тем самым устраняется влияния сил, создаваемых системой возбуждения колебаний, на вторичные колебания инерционной массы;
- в предотвращении замыкания электродов системы возбуждения колебаний и электродов системы емкостного съема выходных колебаний.
Для достижения технического результата микромеханический гироскоп, содержащий подложку из диэлектрического материала, опорные элементы, закрепленные на подложке с противоположных сторон, рамку, расположенную с зазором относительно подложки и связанную с опорными элементами через упругие перемычки, инерционную массу, расположенную с зазором относительно подложки и связанную с рамкой через упругие элементы, систему возбуждения колебаний, состоящую из неподвижных электродов, закрепленных на подложке, и подвижных электродов, систему емкостного съема выходных колебаний, состоящую из неподвижных электродов, закрепленных на подложке, и подвижных электродов, выполненных в инерционной массе, согласно изобретению снабжен дополнительными упругими перемычками и рамой, расположенной внутри инерционной массы с зазором относительно подложки и связанной с инерционной массой через дополнительные упругие перемычки, причем подвижные электроды системы возбуждения колебаний выполнены в раме, а резонансная частота колебаний рамы меньше резонансной частоты колебаний инерционной массы.
Для увеличения надежности работы в условиях действия ударов большой интенсивности в устройство микромеханического гироскопа введены упоры, ограничивающие перемещения инерционной массы, рамки и рамы. Упоры выполнены в раме, в опорных элементах и в рамке.
Введение в конструкцию предлагаемого изобретения рамы, расположенной между опорными элементами с зазором относительно подложки и связанной с инерционной массой через дополнительные упругие перемычки, причем в раме выполнены подвижные электроды системы возбуждения колебаний, а резонансная частота колебаний рамы меньше резонансной частоты колебаний инерционной массы, обеспечивает развязку первичных и вторичных колебаний инерционной массы. При возникновении вторичных колебаний инерционной массы рама остается неподвижной в направлении вторичных колебаний, потому что ее резонансная частота меньше резонансной частоты инерционной массы. Неподвижная в направлении вторичных колебаний рама обеспечивает устранение влияния сил, создаваемых системой возбуждения колебаний, на вторичные колебания инерционной массы, потому что подвижные электроды системы возбуждения колебаний выполнены в раме, и тем самым осуществляется увеличение точности измерения угловой скорости. Введение в конструкцию упоров, которые ограничивают перемещения инерционной массы, рамки и рамы и предотвращают замыкание электродов системы возбуждения колебаний и системы емкостного съема выходных колебаний, привело к увеличению надежности работы микромеханического гироскопа в условиях действия ударов и большой интенсивности.
Наличие в заявляемом изобретении признаков, отличающих его от прототипа, позволяет считать его соответствующим условию «новизна».
Новые признаки, которые содержит отличительная часть формулы изобретения, не выявлены в технических решениях аналогичного назначения. На этом основании можно сделать вывод о соответствии заявляемого изобретения условию «изобретательский уровень».
Изобретение иллюстрируется чертежами.
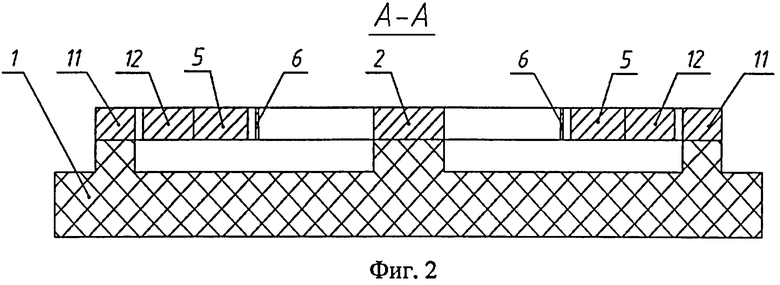
На фиг.1 представлена конструкция предлагаемого микромеханического гироскопа.
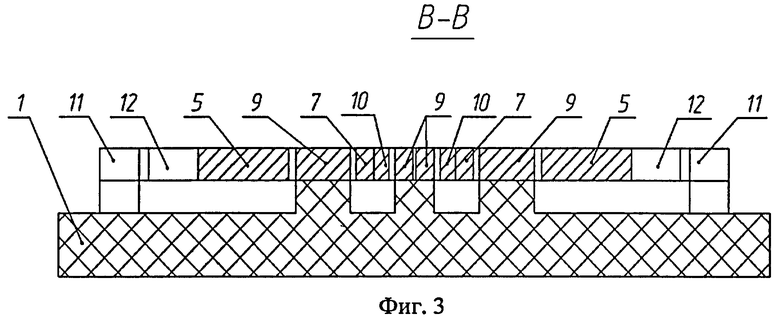
На фиг.2 представлен разрез А-А на фиг.1.
На фиг.3 представлен разрез В-В на фиг.1.
Микромеханический гироскоп содержит подложку 1 из диэлектрического материала, два опорных элемента 2, закрепленных на подложке 1 с противоположных сторон, рамку 3, выполненную в виде двух прямоугольных балок, расположенных с противоположных сторон подложки 1 с зазором относительно нее между опорными элементами 2 и связанных с ними через упругие перемычки 4, выполненные прямоугольной формы в сечении. Инерционная масса 5 расположена между прямоугольными балками рамки 3 с зазором относительно подложки 1 и связана с рамкой 3 через упругие элементы 6, выполненные прямоугольной формы в сечении. Рама 7 расположена внутри инерционной массы 5 с зазором относительно подложки 1 и связана с инерционной массой 5 через дополнительные упругие перемычки 8, причем резонансная частота колебаний рамы 7 меньше резонансной частоты колебаний инерционной массы 5. Система возбуждения колебаний состоит из неподвижных электродов 9, закрепленных на подложке 1 и выполненных в виде гребневой структуры, подвижных электродов 10, выполненных в раме 7 в виде гребневой структуры. Система емкостного съема выходных колебаний состоит из неподвижных электродов 11, закрепленных на подложке 1 и выполненных в виде гребневой структуры, подвижных электродов 12, выполненных в инерционной массе 5 в виде гребневой структуры. В раме 7 выполнены упоры 13, ограничивающие ее перемещение. В опорных элементах 2 выполнены упоры 14, ограничивающие перемещение прямоугольных балок рамки 3. В прямоугольных балках рамки 3 выполнены упоры 15, ограничивающие перемещение инерционной массы 5 (фиг.1, 2, 3).
Работает устройство следующим образом.
При подаче на неподвижные электроды 9 системы возбуждения колебаний переменного напряжения частотой, равной резонансной частоте инерционной массы 5, относительно подвижных электродов 10 системы возбуждения колебаний, между ними возникает электростатическое взаимодействие, что приводит, за счет изгиба упругих элементов 6, к возникновению первичных колебаний рамы 7 в плоскости платы (вдоль оси Y). Колебания рамы 7 через дополнительные упругие перемычки 8 передаются инерционной массе 5. При возникновении вращения подложки 1 вокруг оси, направленной перпендикулярно плоскости подложки (вокруг оси Z), инерционная масса 5 с рамкой 3 под действием сил Кориолиса, за счет изгиба упругих перемычек 4 и дополнительных упругих перемычек 8, начнут совершать вторичные колебания в плоскости платы (вдоль оси X), частота которых равна частоте подаваемого напряжения на электроды 9 и 10 системы возбуждения колебаний. Вторичные колебания инерционной массы 5 приведут к изменению емкостей между электродами 11 и 12 системы емкостного съема выходных колебаний, которые характеризуют величину действующей угловой скорости. Так как резонансная частота колебаний рамы 7 меньше частоты вторичных колебаний инерционной массы 5, то рама 7, за счет изгиба дополнительных упругих перемычек 8, не будет двигаться в направлении оси X, следовательно, подвижные электроды 10 системы возбуждения колебаний, выполненные в раме 7, не будут перемещаться в направлении оси X, что ведет к устранению влияния сил, создаваемых системой возбуждения колебаний, и увеличению точности измерения угловой скорости.
При действии ударов большой интенсивности упоры 13 и 14 ограничивают перемещение рамы 7 и прямоугольных балок рамки 3, что предотвращает замыкание электродов 9 и 10 системы возбуждения колебаний, упоры 14 и 15 ограничивают перемещение инерционной массы 5 и рамки 3, что предотвращает замыкание электродов 11 и 12 системы емкостного съема выходных колебаний. Все это приводит к увеличению надежности микромеханического гироскопа.
Таким образом, были изготовлены лабораторные образцы микромеханического гироскопа, конструкция которого позволяет измерять величину угловой скорости вокруг оси Z, расположенной перпендикулярно подложке, и по сравнению с аналогами позволяет повысить точность измеряемой угловой скорости на 30% и увеличить надежность при действии ударов большой интенсивности.
Следовательно, заявляемое изобретение соответствует условию «промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| Микрооптоэлектромеханический датчик угловой скорости | 2022 |
|
RU2790042C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2016 |
|
RU2656119C2 |
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП | 2014 |
|
RU2561006C1 |
| Компенсационный микрооптоэлектромеханический датчик угловой скорости | 2023 |
|
RU2806242C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2007 |
|
RU2353903C1 |
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП | 2005 |
|
RU2296302C1 |
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП | 2004 |
|
RU2269746C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2018 |
|
RU2686441C1 |
| Интегральный микромеханический гироскоп | 2021 |
|
RU2778622C1 |
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП | 2005 |
|
RU2289788C1 |
Изобретение относится к области измерительной техники и предназначено для измерений угловой скорости. Гироскоп содержит подложку из диэлектрического материала, опорные элементы, закрепленные на подложке с противоположных сторон, рамку, расположенную с зазором относительно подложки и связанную с опорными элементами через упругие перемычки, инерционную массу, расположенную с зазором относительно подложки и связанную с рамкой через упругие элементы, раму, расположенную внутри инерционной массы с зазором относительно подложки и связанную с инерционной массой через дополнительные упругие перемычки, систему возбуждения колебаний, состоящую из неподвижных электродов, закрепленных на подложке, и подвижных электродов, выполненных в раме, систему емкостного съема выходных колебаний, состоящую из неподвижных электродов, закрепленных на подложке, и подвижных электродов, выполненных в инерционной массе. Резонансная частота колебаний рамы меньше резонансной частоты колебаний инерционной массы. Изобретение позволяет повысить точность измерений угловой скорости и увеличить надежность устройства. 1 з.п. ф-лы, 3 ил.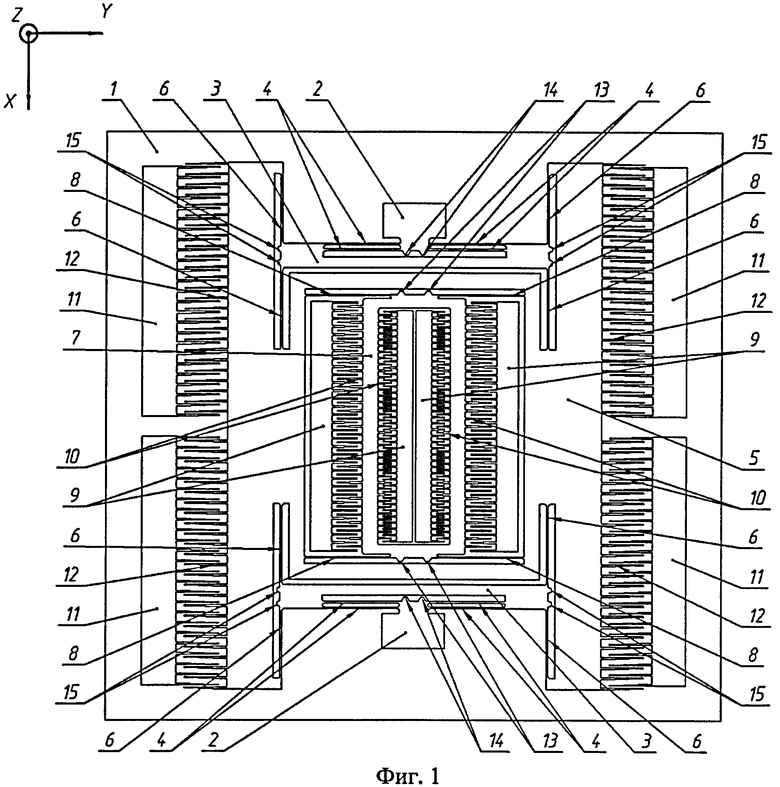
1. Микромеханический гироскоп, содержащий подложку из диэлектрического материала, опорные элементы, закрепленные на подложке с противоположных сторон, рамку, расположенную с зазором относительно подложки и связанную с опорными элементами через упругие перемычки, инерционную массу, расположенную с зазором относительно подложки и связанную с рамкой через упругие элементы, систему возбуждения колебаний, состоящую из неподвижных электродов, закрепленных на подложке, и подвижных электродов, систему емкостного съема выходных колебаний, состоящую из неподвижных электродов, закрепленных на подложке, и подвижных электродов, выполненных в инерционной массе, отличающийся тем, что он снабжен дополнительными упругими перемычками и рамой, расположенной внутри инерционной массы с зазором относительно подложки и связанной с инерционной массой через дополнительные упругие перемычки, причем подвижные электроды системы возбуждения колебаний выполнены в раме, а резонансная частота колебаний рамы меньше резонансной частоты колебаний инерционной массы.
2. Микромеханический гироскоп по п.1, отличающийся тем, что он снабжен упорами, выполненными в раме, в опорных элементах и в рамке.
| РАСПОПОВ В.Я | |||
| Микромеханические приборы | |||
| Учебное пособие | |||
| - Тула: ТулГУ, 2004, с.337, рис.5.9 | |||
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2006 |
|
RU2300773C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2004 |
|
RU2266521C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2004 |
|
RU2251077C1 |
| US 7089792 B2, 15.08.2006 | |||
| US 7258008 B2, 21.08.2007. | |||

