Изобретение относится к космической технике и предназначено для измерения приращения скорости поступательного движения в условиях невесомости в бортовых системах навигации и управления движением космических аппаратов (КА).
Настоящее изобретение предназначено для достоверного и точного измерения приращения скорости КА. Измеритель приращения скорости в навигации - устройство, которое при знании времени приложения импульса можно считать акселерометром.
Известно множество схем устройств акселерометров. В качестве основных направлений разработок, для сравнения с предлагаемым устройством, можно привести следующие:
1. Известен интегральный микромеханический автоэмиссионный акселерометр (RU 2390031 С1), содержащий подложку, четыре неподвижных электрода, жестко закрепленных относительно подложки, инерционную массу, расположенную с зазором относительно подложки, четыре подвижных электрода, жестко соединенных с инерционной массой, образующих с неподвижными электродами четыре пары туннельных контактов, используемых в качестве преобразователей перемещения, якорную область, жестко закрепленную относительно подложки, четыре вспомогательных неподвижных электрода, жестко закрепленных относительно подложки, четыре вспомогательных подвижных электрода, расположенных с зазором над вспомогательными неподвижными электродами, образуя с ними четыре плоских конденсатора, дополнительно содержащий крестообразный подвес, центральная часть которого закреплена относительно якорной области, и опорную рамку, соединенную с крестообразным подвесом и закрепленную относительно инерционной массы, при этом вспомогательные подвижные электроды закреплены по углам опорной рамки, подложка и инерционная масса выполнены из диэлектрического материала, подвижные и неподвижные электроды и вспомогательные неподвижные электроды выполнены из металла, а якорная область, крестообразный подвес, опорная рамка и вспомогательные подвижные электроды выполнены из полупроводникового материала единым элементом. При возникновении ускорения подложки в направлении одной из осей, опорная рамка вместе с инерционной массой и закрепленными на ней подвижными электродами под действием сил инерции перемещается вдоль этой оси, что приводит к деформации крестообразного подвеса. Туннельные токи, протекающие между подвижными электродами и неподвижными электродами, получают равные приращения вследствие одновременного изменения ширины всех зазоров, характеризуя величину ускорения. При работе в компенсационном режиме, сила, воздействующая на опорную рамку с закрепленной на ней инерционной массой, вызванная измеряемым ускорением, уравновешивается с помощью вспомогательных неподвижных электродов и вспомогательных подвижных электродов, что позволяет поддерживать постоянными туннельные токи, протекающие между подвижными и неподвижными электродами. Выходным сигналом при этом является величина напряжения, прикладываемого между вспомогательными электродами. В данном аналоге используют то, что «вследствие малости зазора, разделяющего области подвижных и неподвижных электродов, электроны, имеющие достаточную вероятность прохождения сквозь потенциальные барьеры, образованные зазорами, туннелируют из неподвижных электродов в соответствующие подвижные электроды и тем самым создают туннельные токи, которые являются выходными сигналами устройства».
Недостатком данного устройства является низкая чувствительность, поднять которую в данном направлении техники достаточно трудно, поскольку теория туннельного эффекта сложна, а формулы плотности и силы тока имеют специфический для каждого вещества коэффициент и степенную форму, в степени стоят напряженность внешнего электрического поля и величина в тех же единицах, включающая в себя достаточно много нелинейной специфики, относящейся к свойствам электрона. Отсюда следует, что функция изменения силы тока (что можно интерпретировать как ускорение от внешних сил) также не линейна - одни и те же условия опыта не гарантируют качества определения ускорения.
2. Известен трехосевой акселерометр с переменной осевой чувствительностью (RU 2390030 С2), содержащий инерциальную массу и опорную систему для инерциальной массы, причем опорная система содержит основание и множество опорных элементов, проходящих между основанием и инерциальной массой для подвешивания инерциальной массы в ортогональных направлениях, обеспечивая статически неопределенную конструкцию, датчики напряжений, предназначенные для измерения обусловленного напряжением ускорения в опорных элементах посредством определения параметра ускорения массы. Вместо тензодатчиков возможно использование других датчиков, например пучковых резонаторных систем, в которых частоты колебаний изменяются при изменении нагрузки пропорционально ускорению, формируя соответствующий выходной сигнал.
В данном аналоге возможно применение широкого спектра различных чувствительных элементов, параметры которых изменяются пропорционально ускорению от нагрузки, таких как тензорезисторы, кристаллические диэлектрики, резонаторные системы. Недостатком данного устройства является то, что ни одна модификация данного технического решения не приближает точность определения ускорения к точности показаний единичного хорошего датчика, скажем, 2-3%, так как этому препятствует наличие длинной цепочки датчиковой аппаратуры, преобразовательных цепей и часов от внешнего усилия до результата.
В отношении тензодатчиков. Они работают обычно в области упругих деформаций при ε·10-3, изменяя свое сопротивление пропорционально начальному, е и коэффициенту тензочувствительности k=2-200, при этом в области малых нагрузок (k - единицы), что имеет место при включениях двигателей коррекции в космосе, собственно эффект исчезает на фоне температурного изменения сопротивления даже при изменении температуры на несколько градусов. Такую теплоизоляцию в условиях космоса обеспечить проблематично.
В отношении пьезоэлектрических датчиков. Под действием давления возникают электрические сигналы (суммарная ЕДС пропорциональна давлению) за счет поляризации диэлектрика, пропорциональной некоторому коэффициенту (для кварца, например, 3·10-8), сильно зависящему от условий работы. В общем, эффект, с одной стороны, тонкий (небольшая величина поляризации), с другой, грубоватый - (большие внешние нагрузки). И главное, ввиду того что при относительно постоянном давлении (ускорении), что требуется в космических условиях при определении ускорения движения центра масс КА, эффект быстро исчезает, т.к. электрические заряды «стекают». Поэтому пьезодатчики в принципе не применимы.
В отношении применения резонаторных систем. Данное техническое решение основано на том, что элемент-камертон, подверженный колебанию от генератора частоты, под действием растяжения-сжатия от воздействия инерционной массы изменяет частоту своих колебаний пропорционально ускорению. Пропорциональность возможна еще при колебательном движении инерционной массы и маловероятна при поступательном движении. В любом случае точность определения изменения результирующего колебания резонатора весьма низкая либо технически сложная задача.
3. Наиболее близким из известных технических решений является угловой акселерометр (RU 2399915 С1), содержащий инерционную массу на упругих подвесах, датчик положения, основание и крышку, два постоянных магнита, компаратор, ключ и источник постоянного тока, инерционная масса выполнена из монокристаллического кремния в виде диска с оптическими щелями и размещена в зазоре между постоянными магнитами с возможностью углового перемещения, магниты закреплены на основании и крышке, датчик положения выполнен из двух излучателей и двух фотоприемников, оптические оси которых проходят через оптические щели и закреплены в отверстиях на основании и крышке, на поверхности инерционной массы радиально напылены токопроводящие дорожки, начала и концы которых соединены между собой напыленными токопроводящими кольцами, и каждое из колец токопроводами через упругие подвесы соединено с выходами ключа, к первому входу которого подключен источник постоянного тока, а ко второму входу подключен выход компаратора, к входу которого подключены выходы фотоприемников, а излучатели подключены к источнику постоянного тока. Данное техническое решение взято за прототип.
Опускаем рассмотрение чисто механических всякого рода пружинных систем со стрелками - они явно непригодны для такого деликатного дела, как определение ускорения от слабых возмущающих движение центра масс КА факторов.
Прототип, в принципе, дает хорошие результаты и обладает приемлемыми массогабаритными характеристиками, однако устройство предназначено строго для определения угловых ускорений от внешних сил и должно находиться в центре инерции, отступление от которого вносит значительные погрешности определения углового ускорения. Это большой недостаток данного решения. И данное техническое решение по своей функциональности непригодно для вышеуказанной задачи определения поступательного ускорения.
Задачей является создание прибора, измеряющего приращение скорости либо ускорение поступательного движения, в зависимости от характера действия факторов возмущений негравитационной природы порядка 10-6-10-10 омметров в секунду за секунду [1]. Погрешность прибора (см. обоснование методической точности) должна быть заведомо меньше 6%, при любом уровне ускорения или приращения скорости. В настоящее время в РФ приборы такого класса отсутствуют, более того, отсутствует и система метрологического обеспечения измерений такой величины. Однако подход к созданию космического измерителя приращения скорости (КИПС) снимает актуальность вопроса метрологического обеспечения.
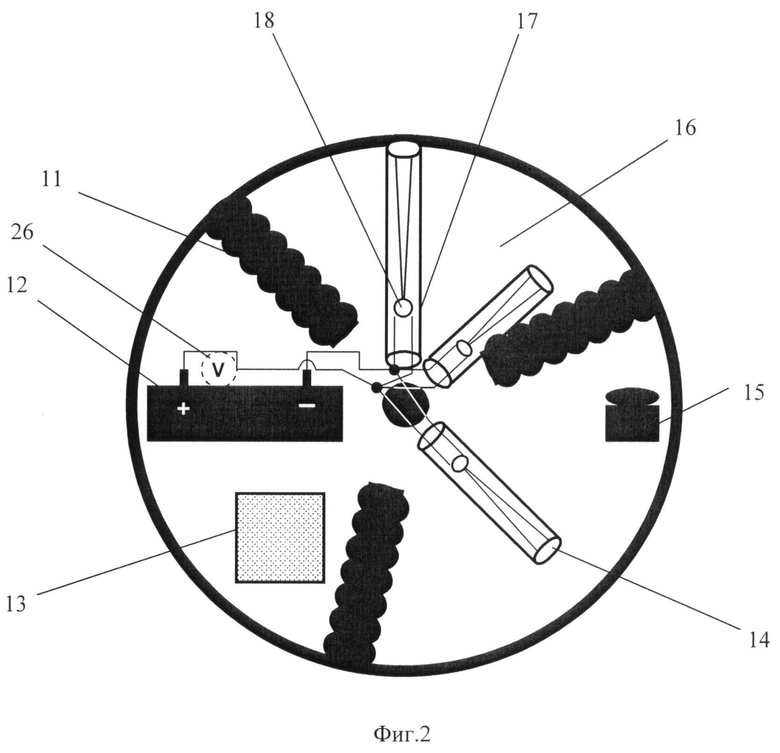
Цель достигается тем, что КИПС, содержащий инерционную массу (ИМ), датчик положения, имеет корпус в виде полого шара, на внутренней поверхности корпуса закреплена сеть фотоприемников, замкнутая на цифровую аппаратуру вне шара, на корпусе расположены равномерным разнесением в пространстве четыре одинаковых внешних электромагнита (ВЭМ), при этом оси ВЭМ пересекаются в центре сферы и строго «привязаны» к спутниковой орбитальной системе координат (ОСК), внутри корпуса находится ИМ - полый шарик не ферромагнетик с тремя отверстиями, оборудованными линзами, главные оптические оси которых являются основными осями подвижной системы координат (ИСК) с началом в центре масс шарика, внутри шарика: четыре одинаковых электромагнита (ЭМ), равномерно разнесенные в пространстве так, что оси ЭМ пересекаются в центре масс шарика; три излучателя (светодиоды) по числу основных осей подвижной системы координат, установленные в главных фокусах линз; источник питания; блок коммутации (БК); цепь индуктивной подзарядки источника питания (ИП) от ВЭМ; датчик заряда ИП; массовый баланс;
эпоксидный наполнитель шарика с каналами прохождения лучей от излучателей до линз, датчик положения выполнен как оптрон из трех оптопар, излучателями и приемниками излучений в которых являются соответственно светодиоды внутри ИМ и сеть адресных фотоприемников на внутренней поверхности корпуса.
Технический результат достигается за счет того, что перед началом рабочего цикла осуществляется притягивание на старт ИМ с последующим переводом ИМ в центр КИПС и выключение всех ЭМ КИПС. Зная начальную привязку ПСК к ОСК и годограф - характер отображения движения лучей от ПСК по поверхности сферы (внутренней поверхности корпуса КИПС) посредством сети адресных фотоприемников, каждый из которых имеет свои номинальные координаты в ОСК, следовательно, зная расстояние, которое проходит инерционная масса внутри сферы, проекции этого расстояния на оси ОСК и время прохождения этих расстояний, будем иметь значение результирующего приращения скорости от слабых возмущающих факторов в проекциях на оси ОСК с относительной погрешностью менее 7%. Время прохождения расстояния инерционной массой есть:

где t1 - шаг рабочего цикла прибора, с;
t0 - момент отключения всех электромагнитов, с.
Времена t1 и t0 считываются по бортовой шкале времени - в секундах от начала опорного года с максимально возможной точностью (0,25 с).
При работе всех ЭМ КИПС в начале измерений проекция каждой из геометрических осей ЭМ ИМ на сферу равноудалена от ближайших к ним центров посадочных мест ВЭМ. Так взаимодействуют магнитные поля ЭМ КИПС - так достигается стабильная фиксация осей ПСК в пространстве в начале рабочего цикла.
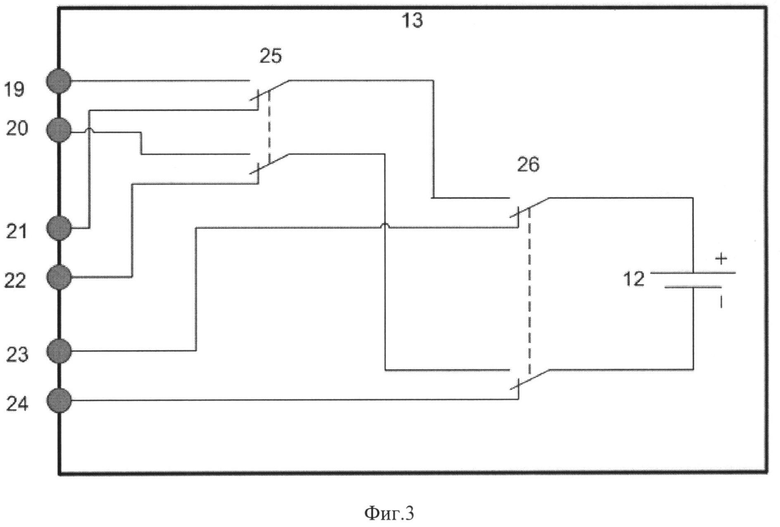
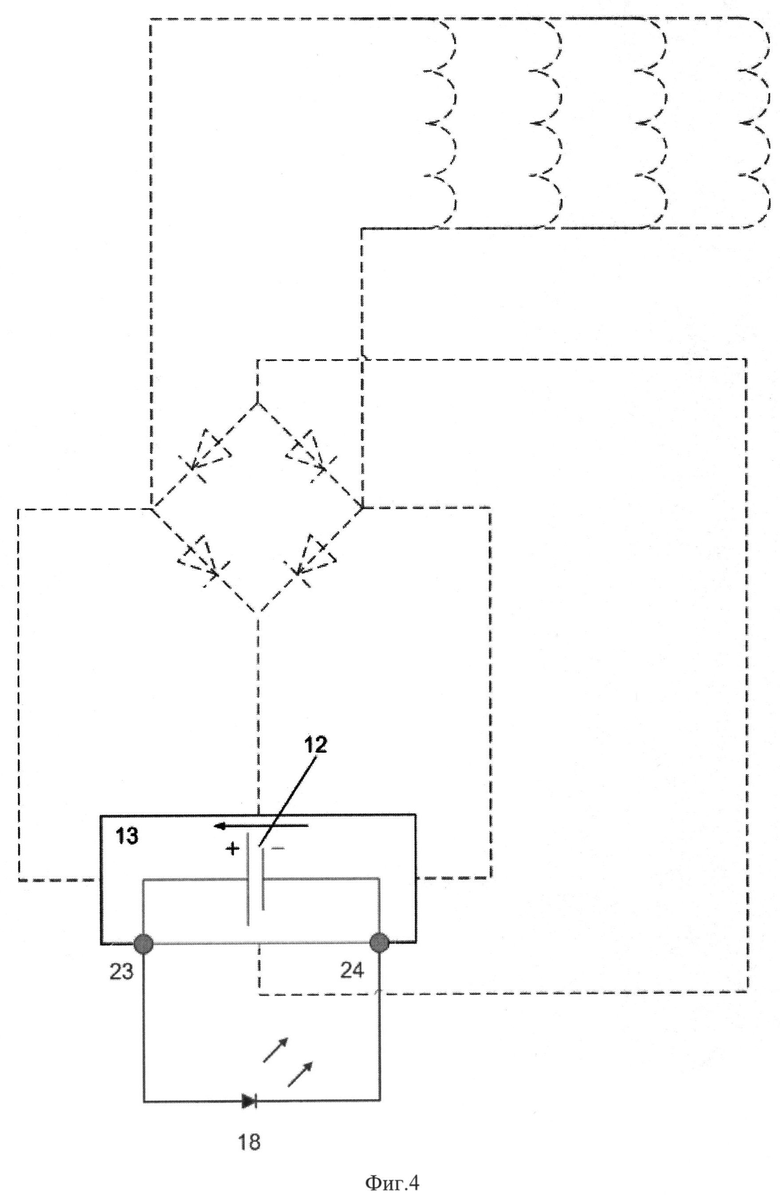
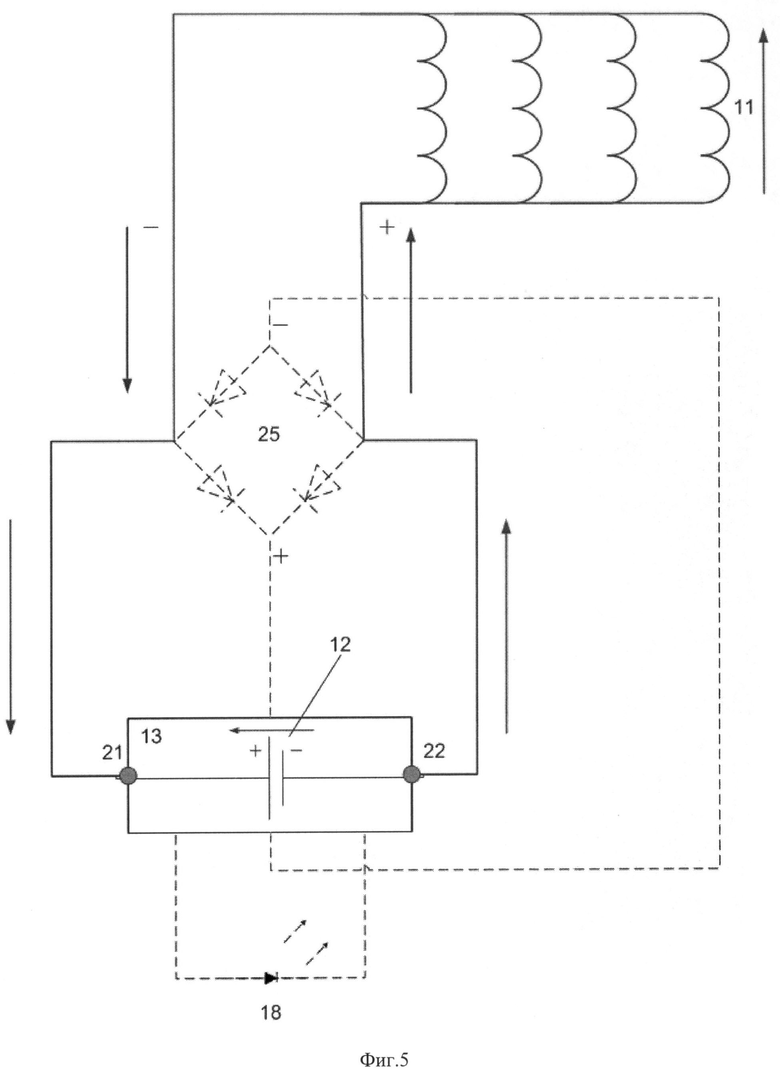
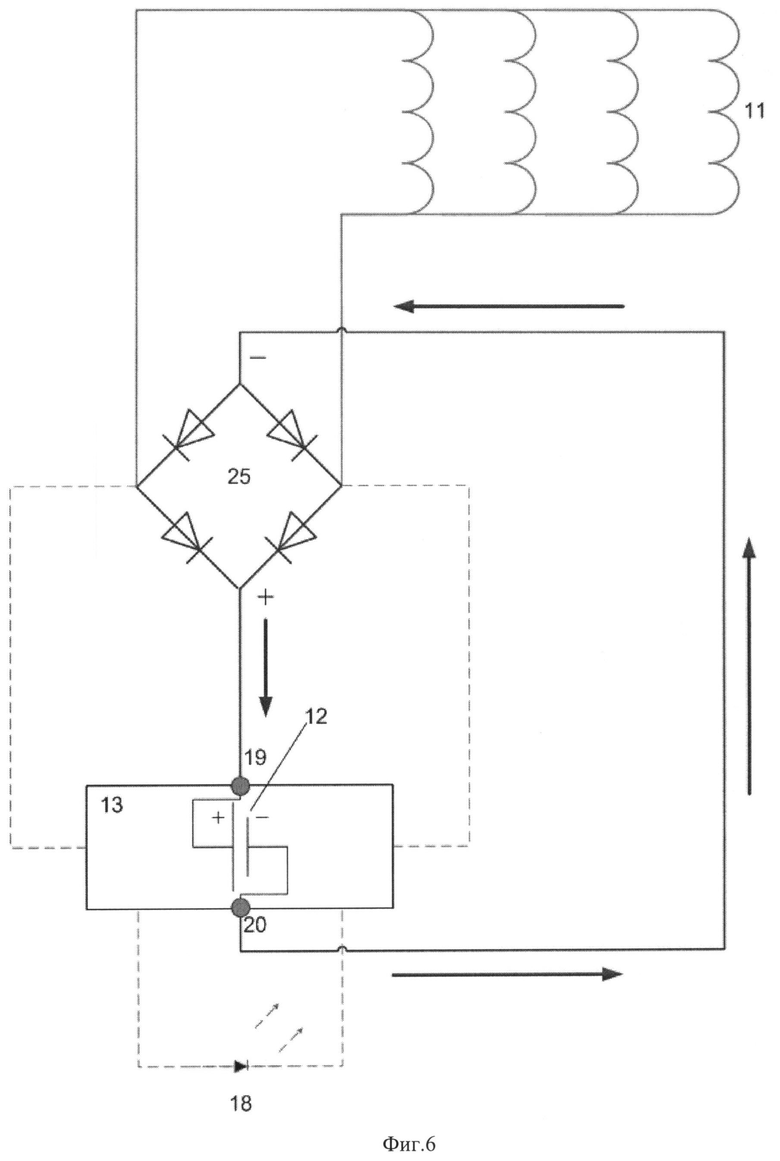
Сущность изобретения поясняется чертежами. На фиг.1 представлена электрокинематическая схема КИПС, на фиг.2 представлено устройство инерционной массы, на фиг.3 представлена принципиальная электрическая схема БК ИМ, на фиг.4, фиг.5, фиг.6 представлены принципиальные электрические схемы активной ИМ соответственно в режимах:
- измерений;
- начальной и точной арретации (на постоянном токе);
- заряда.
Описание всех режимов работы КИПС приведено ниже.
Введены следующие обозначения:
1 - экранно-вакуумная теплоизоляция;
2 - внешние электромагниты (ВЭМ);
3 - корпус КИПС;
4 - лучи от светодиодов;
5 - корпус инерционной массы;
6, 11 - электромагниты инерционной массы (ЭМ ИМ);
7 - блок контроля и управления (БКУ);
8 - внешний источник питания (ВИП);
9 - бортовое программное обеспечение КИПС;
10 - оператор на командно-измерительном пункте;
12 - источник питания - аккумуляторная батарея (АБ);
13 - блок коммутации (БК);
14 - линза;
15 - массовый баланс;
16 - эпоксидный наполнитель;
17 - канал прохождения лучей от излучателей;
18 - излучатель - светодиод;
19-24 - входы-выходы в БК-из БК;
25 - выпрямитель;
26 - датчик заряда АБ ИМ;
27 - оси ПСК.
Размер ячейки сети фотоприемников (0,9÷1) мм2. Сеть фотоприемников совмещают со сферической, предохраняющей от случайных механических повреждений решеткой высотой (0,1-0,3) мм над активной поверхностью фотоприемника, ячейка которой имеет тот же размер, что ячейка сети фотоприемников ((0,9÷1) мм2). Толщина стенок решетки 1 мм. Таким образом, расстояние между центрами фотоприемников на сфере будет около 2 мм в зависимости от принятой схемы регуляризации ячеек.
ИМ со всем ее оборудованием, за исключением малой центральной области, где расположены разъемы излучателей, заливают эпоксидным непрозрачным составом 16, который при затвердевании создает идеальные условия эксплуатации ИМ.
ВИП работает в двух режимах:
- создает постоянный ток;
- создает переменный ток.
Фактически ВИП - набор из двух источников тока: аккумуляторной батареи КА, заряжающейся от солнечных батарей КА, и генератора переменного тока.
КИПС имеет шесть режимов работы и работает следующим образом:
1. Режим начальной арретации ИМ:
- включают АБ 12;
- отключают от ВИП 8 все ВЭМ 2;
- на один из ВЭМ 2 подают постоянный ток того же направления, что и во всех ЭМ ИМ 6;
- по положению светового пятна на сетке фотоприемников фиксируют примыкание одного из ЭМ ИМ к ВЭМ. Тем самым устанавливают ИМ на старт для «выстрела» в центральную область КИПС;
- меняют направление постоянного тока в ВЭМ, тем самым производя «выстрел» в центральную область КИПС;
- через расчетное (известное) время постоянный ток подают на все ВЭМ. Это время зависит от силы отталкивания между ВЭМ и ЭМ ИМ. Арретация ИМ происходит при взаимодействии магнитных полей всех ВЭМ и ЭМ ИМ в варианте взаимоотталкивания как наиболее эффективном т (см. фиг.5).
2. Режим арретации ИМ:
- выключают АБ;
- подключают все ВЭМ к ВИП от переменного тока.
В дальнейшем ИМ будет находиться в центре КИПС в варианте взаимопритяжения за счет явления взаимной индукции под влиянием переменных магнитных потоков ВЭМ, проходящих через ЭМ ИМ, либо будет примкнута к одному из ВЭМ.
3. Режим точной арретации ИМ:
- включают светодиоды 18;
- оператор 10 (или программа программного обеспечения 9) фиксирует наступление устойчивости положения световых пятен на сетке фотоприемников;
- переходят к режиму измерений.
4. Режим измерений:
- выключают все (восемь) ЭМ 2,6 КИПС. ИМ начинает свое движение внутри корпуса КИПС, высвечивая тот или иной пронумерованный фотоприемник-фотодиод на сферической поверхности внутренней стенки корпуса КИПС (см. фиг.4).
Все внешние факторы, за исключением тех, от которых и измеряют возмущения, исключены.
5. Режим зарядки АБ:
- отключают светодиоды 18;
- если КИПС находился в режиме измерений, то выполняются работы по начальной арретации ИМ, затем арретации ИМ, при этом АБ остается во включенном положении. АБ получает заряд за счет явления взаимной индукции под влиянием переменных магнитных потоков ВЭМ, проходящих через ЭМ ИМ (см. фиг.6).
Режим зарядки применяется при разрядке АБ до нижнего уровня.
6. Режим ожидания:
АБ выключена. Этот режим необходим в связи с возможными длительными перерывами работы КИПС по целевому назначению. КИПС находится в режиме арретации.
Итак, ВЭМ находятся всегда в рабочем состоянии, за исключением периодов, когда КИПС находится в режиме измерений, - через них проходит постоянный или сглаженный переменный ток. Режим точной арретации (когда используется постоянный ток) всегда предшествует режиму измерений, режим арретации (дежурный режим; когда используется переменный ток) всегда следует за режимом измерений и предшествует режиму начальной арретации, режим начальной арретации предшествует режиму точной арретации.
БКУ 7 имеет электрическую связь с ВЭМ, радиосвязь с БК 13 ИМ и с датчиком уровня заряда-разряда АБ ИМ. БКУ связан телеметрически с оператором 10 на командно-измерительном пункте и (или) информационно - с соответствующим бортовым программным обеспечением 9 КИПС.
В состав программного обеспечения КИПС входят следующие программы:
- программа расчета вектора приращения скорости;
- программа расчета пройденного ИМ расстояния по активации фотоприемников в привязке к ОСК;
- программа контроля за длительностью начальной арретации и точной арретации по состоянию активации фотоприемников;
- программа рекомендации плана компенсации результирующего приращения скорости КА от возмущающих факторов, меньших, чем солнечное давление и эксцентриситет орбиты КА, включением двигателей малой тяги.
Обоснование методической точности предлагаемого решения
Если фиксировать только относительное расстояние, пройденное ИМ (КА), и время, то получим величину приращения скорости - важную для оценок и навигации величину. Если будет достоверно известно, что возмущающий фактор (возмущающие факторы) имеет (имеют) перманентный характер, то получим к тому величину ускорения (результирующего ускорения).
1. Приращение скорости, ввиду ничтожно малой длительности возмущающего импульса по сравнению с рабочим циклом измерений КИПС (когда возмущения действуют постоянно, см. п.2), рассчитывают по формуле равномерного движения при отсутствии начальной скорости:

где S - пройденное расстояние, м.
Пронумеруем координатные оси ПСК:


Проекцию (ПSij) расстояния, пройденного центром ИМ в процессе измерений
КИПС, на выбранную координатную плоскость ПСК на начальный момент рабочего цикла измерений (НПСК), фиксированную в начале рабочего цикла, определяют по соотношению:

где R - радиус внутренней сферы КИПС (0,075-0,125) м;
Li - проекция на внутреннюю сферу КИПС пройденного центром ИМ пути, высвеченного лучом от i-го светодиода и зафиксированного адресными фотоприемниками, м.
Следует иметь в виду, что нумерация лучей (li) (или координатных осей ПСК) соотносится с нумерацией Пs так: (l1-ПS23); (l2-ПS13); (l3-ПS12). Поскольку речь
идет о параллельном переносе ПСК ИМ на текущий момент времени относительно НПСК ИМ и последняя имеет строгую привязку к ОСК через матрицу косинусов установочных углов поворота в режимах начальной и точной арретации ИМ, всегда можно иметь любой набор данных, связанных с положением ИМ в инерциальном пространстве. Адресность фотоприемников снимает все вопросы определения положения ИМ в пространстве КИПС на любой момент времени.
Можно было бы обойтись и двумя излучателями, дающими излучение только вдоль двух координатных осей, поскольку на момент окончания рабочего цикла измерений всегда напрямую, через адресность фотоприемников получаем координаты конца пути ИМ. Однако избыточное независимое измерение позволяет выявлять систематические ошибки установок излучателей, т.е. систематические уклонения лучей l1, l2 и l3 от номинальных направлений. Уравнение (4) позволяет находить линейные, а через них и угловые невязки. Юстировка КИПС не входит в состав отличительных признаков изобретения - устройства, - важна лишь идея работоспособности технического решения.
Дифференцируем (2) и переходим к уравнению независимых ошибок:

и


Примем, что расстояние, которое может пройти центр ИМ внутри КИПС (точнее КА, относительно неподвижной в инерциальном пространстве ИМ), составляет (0,05-0,10) м. Примем, что время прохождения этого расстояния находится в реальном диапазоне [360-36000] с, т.е. [6 мин - 10 час]. Тогда приращение скорости ΔV составит (1,4·10-4-2,8·10-6) м/с, что, при наличии постоянного ускорения, составит соответственно (3,9-10-7-7,7-10-11) м/с2.
Величина δV1 - составляющая погрешности приращения скорости от действующих на пройденное расстояние ИМ факторов: плотности размещения фотоприемников (δS1); работы системы ориентации и стабилизации (СОС) КА (δS2); и точности начальной арретации ИМ (δS3). Последние два фактора обуславливают точность привязки ПСК к ОСК.
Плотность сети фотоприемников с учетом предохраняющей решетки составляет 1 фотоприемник на 4 мм2 площади, или центры фотоприемников отстоят друг от друга на расстоянии 2 мм. Это составляющая δS1.
КА в процессе эксплуатации производит эволюции вокруг центра масс согласно логике работы СОС. КИПС может быть расположен от центра масс КА на удалении, гарантированно не превышающем 1 м. Погрешность поддержания ориентации КА в пространстве не превышает 0,10. Это значит, что в предельном случае точка соприкосновения ИМ со стенкой КИПС может отстоять от точки радиального направления на расстоянии, не превышающем l=1000·sin(0,10)=1,75 мм, что, в свою очередь, означает погрешность в знании пройденного расстояния:

где r - радиус внешней поверхности ИМ, 0,025 м.
Тогда δS2=(0,012-0,031)мм.
Итак, δS1,2=2,031 мм.
Точность арретации ИМ (δS3) как вполне эффективного действия, оценивается в 1 мм при r=25 мм.
Итак, δS=3,031 мм. Тогда, δV1=0,003031/360=8,4·10-6 м/с при 6 мин полного рабочего цикла измерений - когда ИМ касается решетки с фотоприемниками, и 8,4·10-8 м/с - при 10 ч полного рабочего цикла.
Рассмотрим второе слагаемое (7) в уравнении (5) - составляющую погрешности ускорения от точности привязки событий, т.е. от точности фиксации времен t1 и t0. Эта точность определяется погрешностью снятия бортового времени, которое составляет на борту КА порядка 0,25 с (δt=0,25). Тогда δV2 равно 9,6·10-8 м/с и 1,9·10-11 м/с при соответственно 6 мин и 10 ч полного рабочего цикла измерений. Значения величины δV2 на два порядка меньше значений δV1, следовательно, значениями величины δV2 всегда можно пренебрегать.
Отношение δV/ΔV вне зависимости от градаций степеней приращения скорости в процентах составляет от 3% до 6%.
2. Постоянно действующее на интервале рабочего цикла измерений достоверное ускорение, интересующее чисто теоретически, определяется из уравнения равноускоренного движения при отсутствии начальной скорости движения тела:

где S - пройденное расстояние, м;
Δt=t1-t0, с.
Дифференцируем (9) и переходим к уравнению независимых ошибок:

Набор факторов, влияющих на точность измерений КИПС, тот же, крайние значения длительности измерений (Δt) и расстояния, которое может пройти центр ИМ внутри КИПС (R-r), те же, что и в п.1. Имеем δa=2·0,003031/(360)2=4,7·10-8 м/c2, при 6 мин полного рабочего цикла измерений, и 4,7·10-12 м/c2 - при 10 ч полного рабочего цикла. Отношение δа/а вне зависимости от градаций степеней возмущающих ускорений в процентах составляет так же от 3% до 6%.
КИПС является именно космической техникой, поскольку в условиях гравитации он работать не может, что позволяет именовать данный измеритель космическим.
Следует отметить, что для вычленения того или иного возмущающего орбитальное движение КА фактора необходимо исключать или ответственно учитывать в прогнозе движения все другие возмущающие факторы того же порядка воздействия.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОРРЕКЦИИ ОРБИТАЛЬНОГО ДВИЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2011 |
|
RU2496688C2 |
| ВЫСОКОТОЧНЫЙ КОСМИЧЕСКИЙ АКСЕЛЕРОМЕТР | 2011 |
|
RU2468374C1 |
| Акселерометр космический | 2019 |
|
RU2721589C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ТЯГИ СТАЦИОНАРНОГО ПЛАЗМЕННОГО ДВИГАТЕЛЯ | 2022 |
|
RU2786669C1 |
| СПОСОБ КОРРЕКЦИИ ОРБИТАЛЬНОГО ДВИЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2022 |
|
RU2787522C1 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ЗЕМЛИ | 2015 |
|
RU2621933C2 |
| СПОСОБ УДЕРЖАНИЯ ГЕОСТАЦИОНАРНОГО КОСМИЧЕСКОГО АППАРАТА НА ЗАДАННОЙ ОРБИТАЛЬНОЙ ПОЗИЦИИ | 2011 |
|
RU2486111C1 |
| МИКРОМЕХАНИЧЕСКИЙ ДАТЧИК УГЛОВОЙ СКОРОСТИ | 2009 |
|
RU2410701C1 |
| СПОСОБ КОРРЕКЦИИ ОРБИТАЛЬНОГО ДВИЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2012 |
|
RU2496689C1 |
| ЛИНЕЙНЫЙ МИКРОАКСЕЛЕРОМЕТР С ОПТИЧЕСКОЙ СИСТЕМОЙ | 2014 |
|
RU2564810C1 |
Изобретение относится к измерительным приборам космического аппарата (КА) и может использоваться для высокоточного определения малого приращения скорости поступательного движения КА. Измеритель имеет полый шарообразный корпус (1), на внешней поверхности которого находятся электромагниты (2). На внутренней поверхности корпуса (1) расположена сеть адресных фотоприемников, а внутри корпуса - инерционная масса (5). Электромагнитный подвес массы (5) выполнен в виде встроенных электромагнитов (6), взаимодействующих с электромагнитами (2). Датчик положения массы (5) представляет собой оптрон из трех оптопар. В оптопарах излучателями служат светодиоды внутри массы (5) с оптическими осями (27). Излучение вдоль этих осей попадает на указанные фотоприемники корпуса. Светодиоды питаются от аккумулятора гелиевого типа, встроенного в массу (5). Он заряжается от токов в обмотках электромагнитов (6). Режимы работы устройства задаются оператором (10) через блок контроля и управления (7) с программным обеспечением (9). Питание осуществляется от источника (8). Технический результат изобретения состоит в создании высокоточного (погрешность менее 6 %) прибора для измерения приращений скорости при действии ускорений негравитационной природы порядка (10-6-10-10) м/с2. 1 з.п. ф-лы, 6 ил.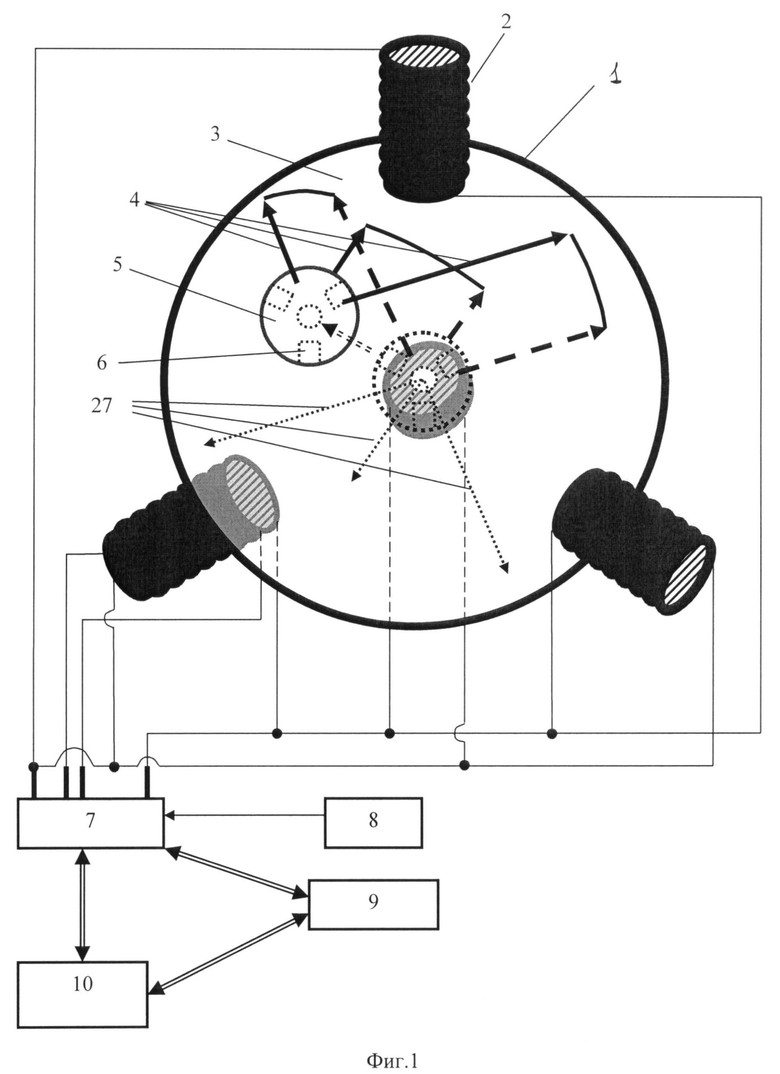
1. Космический измеритель приращения скорости, содержащий инерционную массу и датчик положения, отличающийся тем, что корпус измерителя представляет собой полый шар, на внутренней поверхности которого закреплена сеть фотоприемников, замкнутая на цифровую аппаратуру вне шара, на корпусе расположены равномерным разнесением в пространстве четыре одинаковых внешних электромагнита, при этом оси электромагнитов пересекаются в центре сферы и строго привязаны к спутниковой орбитальной системе координат, внутри корпуса находится инерционная масса - полый шарик, не являющийся ферромагнетиком, с тремя отверстиями, оборудованными линзами, главные оптические оси которых являются основными осями подвижной системы координат с началом в центре масс шарика, внутри шарика находятся: четыре одинаковых электромагнита, равномерно разнесенных в пространстве так, что их оси пересекаются в центре масс шарика, три излучателя (светодиоды) по числу основных осей подвижной системы координат, установленные в главных фокусах линз, источник питания, блок коммутации, цепь индуктивной подзарядки источника питания от внешних электромагнитов, датчик заряда источника питания, массовый баланс; эпоксидный наполнитель шарика с каналами прохождения лучей от излучателей до линз, при этом датчик положения выполнен как оптрон из трех оптопар, излучателями и приемниками излучений в которых являются соответственно светодиоды внутри инерционной массы и сеть адресных фотоприемников на внутренней поверхности корпуса.
2. Измеритель по п.1, отличающийся тем, что функцию датчика заряда источника питания выполняет миллиамперметр во внешней цепи, по которой проходит фототок.
| US 20020036251 A1, 28.03.2002 | |||
| US 20020104927 A1, 08.08.2002 | |||
| US 6574534 B2, 03.06.2003 | |||
| ОТОПИТЕЛЬНАЯ ПЕЧЬ | 1991 |
|
RU2020381C1 |
| Акселерометр | 1979 |
|
SU845102A1 |
| УГЛОВОЙ АКСЕЛЕРОМЕТР | 2009 |
|
RU2399915C1 |

