Изобретение относится к лазерной технике и предназначено для регистрации голограмм космических объектов в условиях космического пространства с борта космического аппарата, в частности, космического корабля.
Регистрация голограмм осуществляется с целью получения наиболее полной информации о наблюдаемом объекте и воспроизведения с полученной голограммы объемного изображения наблюдаемого объекта для его дальнейшего изучения. Важной проблемой современной космонавтики является наличие в околоземном пространстве различных остатков космических аппаратов и их элементов, которые могут представлять опасность для действующих и используемых спутников Земли и эксплуатируемых космических аппаратов. Для своевременного очищения околоземного космического пространства от оставшихся не используемых космических аппаратов и их элементов (космического мусора) необходимо иметь информацию о размерах, форме этих объектов космоса для решения вопроса о методах их удаления или разрушения до мелкодисперсной фракции. Получение голограмм таких нежелательных космических объектов позволит получить о них более полную информацию, включающую объемное изображение. Аналогично для Земли и космических аппаратов представляют опасность различные астероиды, которые могут нанести вред при непосредственном столкновении с Землей и действующими космическими аппаратами. Поэтому получение голограмм астероидов и других естественных космических объектов также представляет интерес с целью их более полного изучения. В настоящее время техника голографии хорошо развита и обеспечивает получение голограмм фиксированных неподвижных объектов в земных условиях. Однако для регистрации голограмм в условиях космического пространства необходимо иметь аппаратуру, обеспечивающую регистрацию голограмм движущихся объектов при малом уровне принимаемого отраженного от космического объекта оптического сигнала.
Известен оптический локатор, содержащий импульсный лазер, телескоп, опорный канал с оптическим квантовым усилителем (далее - ОКУ) и объектный канал, систему формирования голограмм, блок восстановления голограмм, полуволновые устройства, блоки сравнения и управления [1]. В данном локаторе для формирования опорного сигнала для регистрации голограммы используется оптический сигнал, выделенный из оптического излучения, отраженного от объекта. Данный сигнал имеет очень малую интенсивность, для формирования качественной голограммы, вследствие чего подвергается усилению, с помощью ОКУ. В то же время для формирования объектного сигнала используется непосредственно оптический сигнал, отраженный от объекта без усиления. Это существенно снижает чувствительность оптического локатора в целом. Кроме того, следует отметить, что современные ОКУ, обладающие высокими коэффициентами усиления и высокой чувствительностью, имеют очень узкую спектральную полосу пропускания. Поэтому использование таких ОКУ в оптических локаторах удаленных космических объектов невозможно без компенсации доплеровского сдвига частоты принимаемого оптического сигнала, отраженного от удаленного движущегося космического объекта. Таким образом, к недостаткам данного оптического локатора следует отнести низкую эффективность приема сигналов, отраженных от космических объектов вследствие низкой чувствительности, невозможности компенсации доплеровских сдвигов в принимаемом оптическом сигнале.
Известен оптический локатор, содержащий блок излучения, приемную и передающую оптические системы, опорный канал с отражателем, информационный канал и приемное устройство [2]. К недостаткам данного локатора следует отнести низкую чувствительность и отсутствие возможности компенсации доплеровского сдвига, что не позволяет регистрировать качественную голограмму и получить достоверную информацию о наблюдаемом космическом объекте.
Известна голографическая установка, содержащая стабилизированную платформу, лазер, оптические системы формирования опорного и предметного пучка, регистратор голограммы и систему стабилизации платформы [3]. К недостаткам данного устройства следует отнести низкую чувствительность при регистрации удаленных объектов и невозможность регистрации голограммы движущегося объекта.
Известно лазерное локационной устройство, содержащее лазерный генератор - передатчик, приемный телескоп, лазерный усилитель - активный квантовый фильтр, фотоприемную матрицу, оптический модулятор, блок обработки информации, блок управления [4]. Данное устройство обладает высокой чувствительностью и обеспечивает прием сигналов и формирование изображений удаленных космических объектов. К недостаткам данного устройства следует отнести отсутствие возможности регистрации голограмм космических объектов.
Наиболее близким аналогом к заявленной системе является лазерный локатор, содержащий телескоп, фотоприемный блок, блок спектральных фильтров, лазерный передатчик и лазерный гетеродин, блоки сдвига частоты и сканирования лазерного излучения, блок измерения частоты [5]. Данный локатор обладает высокой чувствительностью при регистрации сигналов, отраженных от удаленных космических объектов, а также обеспечивает компенсацию доплеровских сдвигов частоты лазерного излучения (далее - ЛИ) при приеме сигналов от движущихся объектов. К недостаткам данного локатора следует отнести отсутствие технических элементов для регистрации голограммы наблюдаемого объекта.
Техническая проблема, решаемая заявленным изобретением, состоит в создании лазерной системы, в которой реализуется возможность регистрации голограмм движущихся объектов.
При этом достигается технический результат, заключающийся в обеспечении высокой чувствительности лазерной системы за счет использования лазерного усилителя для усиления объектного сигнала голограммы и за счет компенсации доплеровских сдвигов частоты ЛИ.
Указанная техническая проблема решается, а технический результат достигается в результате создания лазерной голографической локационной системы, содержащей последовательно установленные на оптической оси оптически связанные телескоп с блоком наведения, первое выносное полупрозрачное зеркало с блоком перемещения, лазерный усилитель с блоками накачки и управления лазерным усилителем, второе выносное полупрозрачное зеркало с блоком перемещения, первое полупрозрачное зеркало и телевизионную камеру, подключенную к блоку управления, а также лазерный передатчик, лазерный гетеродин и измеритель частоты лазерного излучения, первый и второй блоки сдвига частоты лазерного излучения, первый и второй блоки сканирования лазерного излучения, первый, второй и третий управляемые ослабители, и первый фотоприемный блок, подключенные к блоку управления, второй фотоприемный блок и подключенный к его выходу блок спектральных фильтров, выходом подключенный к блоку управления, первый и второй объективы, второе - седьмое полупрозрачные зеркала, первое - четвертое отражательные зеркала, уголковый отражатель с блоком перемещения, при этом оптический выход телескопа связан с оптическим входом первого фотоприемного блока посредством оптически последовательно связанных первого выносного полупрозрачного зеркала, первого отражательного зеркала, и первого объектива, одновременно оптический выход телескопа оптически связан с оптическим входом второго фотоприемного блока посредством последовательно оптически связанных первого выносного полупрозрачного зеркала, третьего полупрозрачного зеркала и второго объектива, оптический выход лазерного гетеродина оптически связан с оптическим входом первого управляемого ослабителя посредством седьмого полупрозрачного зеркала, оптический выход первого управляемого ослабителя оптически связан с оптическим входом первого блока сдвига частоты лазерного излучения, оптический выход которого связан с оптическим входом первого блока сканирования лазерного излучения, оптический выход которого связан с оптическим входом телевизионной камеры посредством первого полупрозрачного зеркала, оптический выход лазерного гетеродина оптически связан с оптическим входом второго фотоприемного блока посредством последовательно оптически связанных второго отражательного зеркала, второго управляемого ослабителя, второго блока сдвига частоты лазерного излучения, второго блока сканирования лазерного излучения и четвертого полупрозрачного зеркала, одновременно оптический выход лазерного гетеродина оптически связан с первым оптическим входом измерителя частоты лазерного излучения посредством шестого полупрозрачного зеркала, оптический выход лазерного передатчика оптически связан с оптическим входом третьего управляемого ослабителя, оптический выход которого оптически связан с четвертым отражательным зеркалом, установленным в оптической тени контррефлектора телескопа, одновременно оптический выход лазерного передатчика оптически связан со вторым оптическим входом измерителя частоты лазерного излучения посредством пятого полупрозрачного зеркала и третьего отражательного зеркала, уголковый отражатель установлен перед телескопом со смещением относительно оптической оси телескопа, блок перемещения уголкового отражателя подключен к блоку управления, к которому подключены также блок наведения телескопа, блоки перемещения первого и второго выносных полупрозрачных зеркал, блоки накачки и управления лазерным усилителем, оптический выход лазерного усилителя оптически связан с оптическим входом первого фотоприемного блока посредством второго выносного полупрозрачного зеркала, второго полупрозрачного зеркала и первого объектива.
В одном из частных вариантов выполнения системы лазерный передатчик и лазерный гетеродин выполнены на основе лазерных генераторов с возможностью перестройки частоты генерируемого лазерного излучения.
В другом частном варианте выполнения системы лазерный усилитель выполнен с возможностью перестройки частоты усиливаемого лазерного излучения.
В еще одном частном варианте выполнения системы блок сканирования лазерного излучения выполнен на основе акустооптической ячейки, предназначенной для возбуждения ультразвуковых волн, обеспечивающих изменение направления распространения проходящего через ячейку лазерного излучения.
В еще одном частном варианте выполнения системы блок сдвига частоты лазерного излучения выполнен на основе акустооптической ячейки, предназначенной для возбуждения ультразвуковых волн, обеспечивающих изменение направления распространения проходящего через ячейку лазерного излучения.
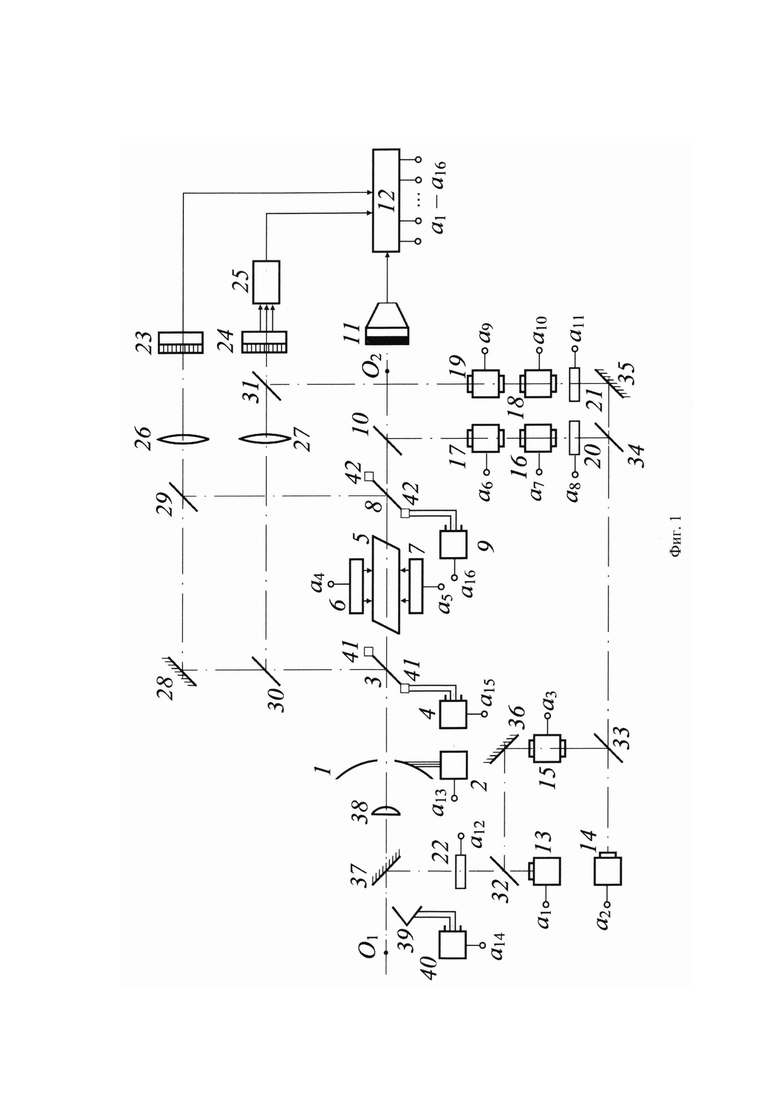
На фиг. 1 представлена блок-схема предлагаемой лазерной голографической локационной системы. Цифрами обозначены следующие элементы.
1. Телескоп.
2. Блок наведения.
3. Первое выносное полупрозрачное зеркало.
4. Блок перемещения первого выносного полупрозрачного зеркала.
5. Лазерный усилитель.
6. Блок накачки.
7. Блок управления лазерным усилителем.
8. Второе выносное полупрозрачное зеркало.
9. Блок перемещения второго выносного полупрозрачного зеркала.
10. Первое полупрозрачное зеркало.
11. Телевизионная камера.
12. Блок управления.
13. Лазерный передатчик.
14. Лазерный гетеродин.
15. Измеритель частоты ЛИ.
16 и 18 - Первый и второй блоки сдвига частоты ЛИ.
17 и 19 - Первый и второй блоки сканирования ЛИ.
20-22 - Первый - третий управляемые ослабители.
23. Первый фотоприемный блок.
24. Второй фотоприемный блок.
25. Блок спектральных фильтров.
26, 27 - Первый и второй объективы.
28. Первое отражательное зеркало.
29-34 - Второе - седьмое полупрозрачные зеркала.
35, 36, 37 - Второе - четвертое отражательные зеркала.
38. Контррефлектор телескопа.
39. Уголковый отражатель.
40. Блок перемещения уголкового отражателя.
41, 42 - Держатели выносных полупрозрачных зеркал.
О1-О2 - Оптическая ось.
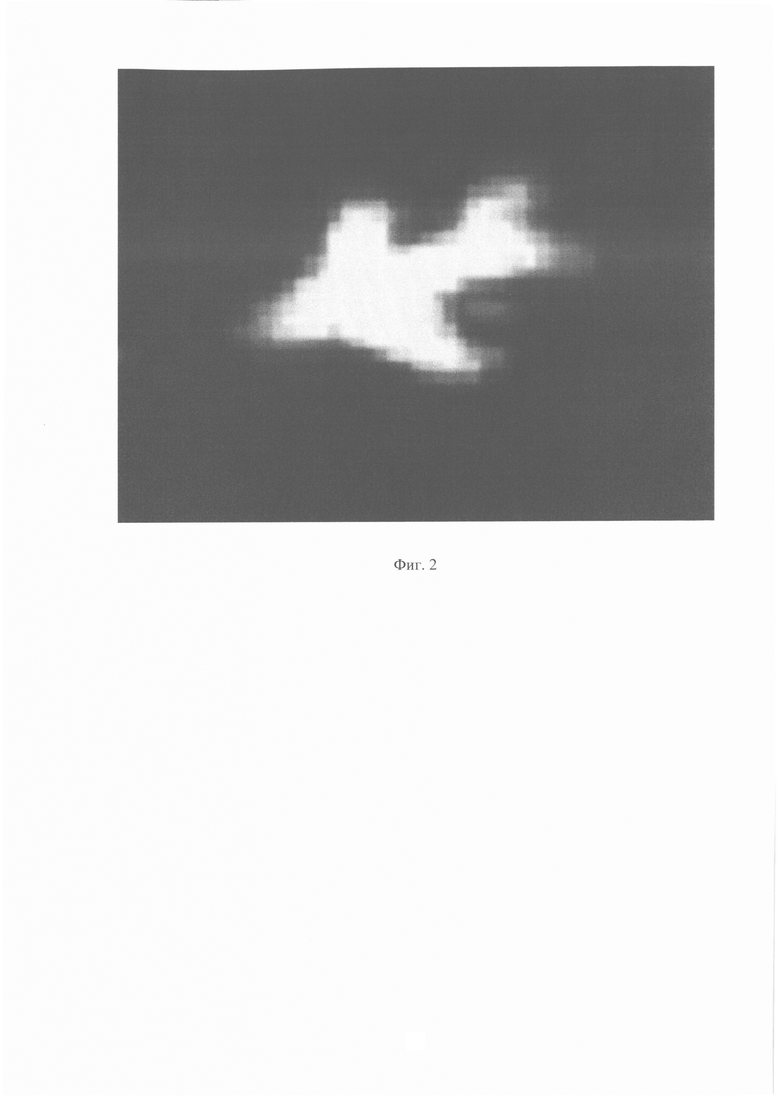
На фиг. 2 представлено изображение наблюдаемого тест-объекта в режиме усиления принимаемого ЛИ в лазерном усилителе (поз. 5 на фиг. 1).
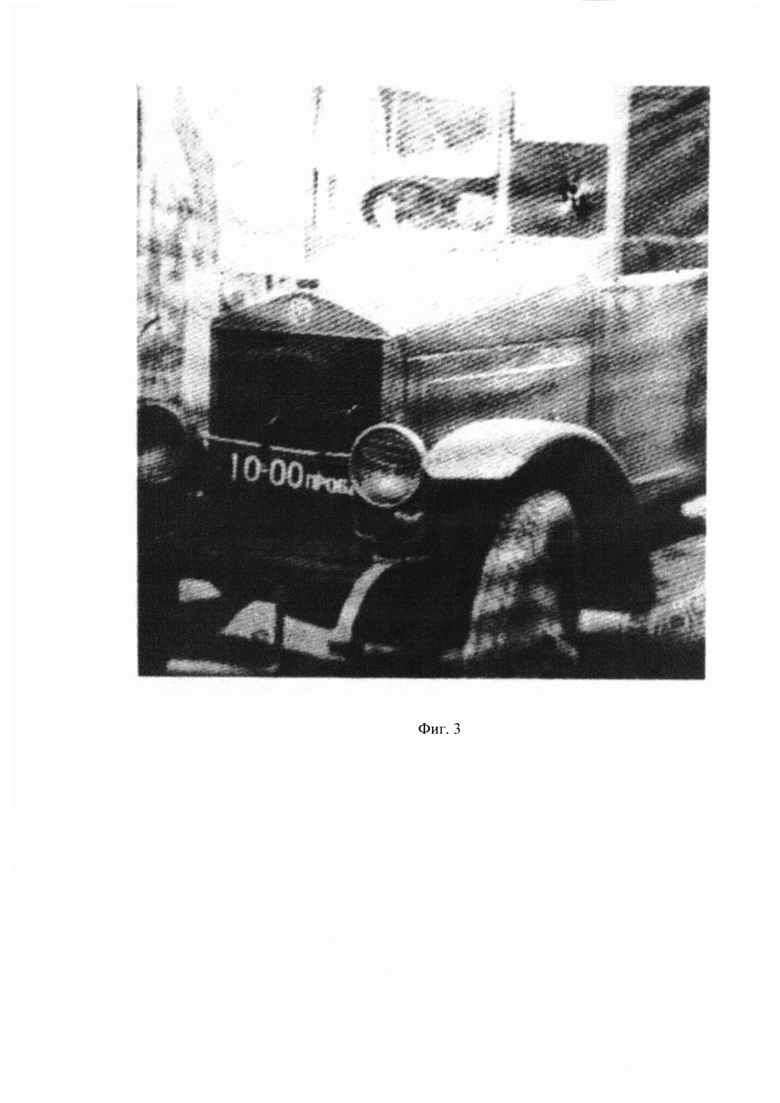
На фиг. 3 представлено изображение тест-объекта, полученное при обработке голограммы.
Принцип действия предлагаемой лазерной голографической локационной системы заключается в следующем.
Лазерная голографическая локационная система (далее - система) осуществляет прием оптического излучения, исходящего от наблюдаемого космического объекта, посредством телескопа 1. Подсвет наблюдаемого космического объекта осуществляется лазерным передатчиком 13. С выхода телескопа 1 оптическое излучение поступает на оптический вход лазерного усилителя 5, проходит через него вдоль оптической оси и подвергается квантовому усилению с коэффициентом усиления K, определяемым режимом работы лазерного усилителя 5 в соответствии с уровнем накачки, определяемом блоком накачки 6. Далее усиленное оптическое излучение, распространяясь вдоль оптической оси, поступает на оптический вход телевизионной камеры 11. Данное усиленное оптическое излучение выполняет роль объектного сигнала при формировании и регистрации голограммы. Одновременно на оптический вход телевизионной камеры 11 поступает лазерный сигнал от лазерного гетеродина 14, который генерирует оптический гетеродинный сигнал соответствующей заданной длины волны (оптической частоты), установленной по сигналам от блока управления 12.
Лазерный гетеродинный сигнал с выхода лазерного гетеродина 14 поступает на вход телевизионной камеры 11 посредством полупрозрачного зеркала 34, управляемого ослабителя 20, первого блока сдвига частоты 16, первого блока сканирования ЛИ 17 и полупрозрачного зеркала 10. Данный лазерный гетеродинный сигнал выполняет роль опорного лазерного сигнала при формировании и регистрации голограммы телевизионной камерой 11. В результате взаимодействия (интерференции) на входе телевизионной камеры 11 принимаемого оптического сигнала и гетеродинного сигнала образуется голограмма, которая регистрируется в телевизионной камере 11, усиливается, оцифровывается и поступает с выхода телевизионной камеры 11 на вход блока управления 12, который представляет собой ЭВМ, осуществляющую обработку зарегистрированных голограмм, а также управляет работой всеми элементами системы (фиг. 1). На этом основной цикл работы системы завершается. Полученная и обработанная голограмма передается на Землю для дальнейшего использования и изучения. Для обеспечения данного основного цикла работы системы до собственно регистрации голограммы в телевизионной камере 11 осуществляется специальный цикл предварительной настройки элементов системы. Далее рассмотрим этот цикл предварительной настройки системы, который обеспечивает правильное и эффективное функционирование всех элементов системы.
Как было отмечено, основным элементом системы является телевизионная камера 11, которая осуществляет прием и регистрацию голограммы наблюдаемого космического объекта. Система содержит дополнительно первый и второй фотоприемные блоки 23 и 24, которые выполняют вспомогательные функции при настройке работы системы, а в период основного цикла работы системы формируют дополнительную информацию о наблюдаемом объекте. При этом первый фотоприемный блок 23 регистрирует прямое изображение объекта, формируемое объективом 26 на основе оптического излучения, принятого телескопом 1. Первый фотоприемный блок 23 представляет собой двумерную матрицу чувствительных фотоэлементов, например, ПЗС матрицу. Второй фотоприемный блок 24 также представляет собой двумерную матрицу фотоэлементов, например, фотоумножителей, каждый из которых регистрирует сигнал интерференции между принятым оптическим сигналом и гетеродинным сигналом, поступающим на оптический вход фотоприемного блока 24 с выхода лазерного гетеродина 14 посредством последовательно оптически связанных следующих вспомогательных элементов: отражательного зеркала 35, третьего управляемого ослабителя 21, второго блока сдвига частоты 18, второго блока сканирования ЛИ 19 и полупрозрачного зеркала 31. Второй фотоприемный блок 24 выполняет функции приемного элемента лазерной гетеродинной системы и формирует и регистрирует изображение наблюдаемого объекта на основе регистрации сигнала биений в каждом фоточувствительном элементе своей двумерной матрицы. Выходы второго фотоприемного блока 24 непосредственно связаны со входами блока спектральных фильтров 25, в котором осуществляется усиление и измерение частоты сигналов с выходов каждого фотоприемного элемента блока 24. В оцифрованной форме эта информация с выхода блока спектральных фильтров 25 поступает в блок управления 12. При этом второй объектив 27, как и первый объектив 26, осуществляет формирование прямого изображения наблюдаемого объекта с оптического выхода телескопа 1. Информация об изображении объекта с выхода первого и второго фотоприемных блоков необходима и используется для настройки режима регистрации голограммы в телевизионной камере 11.
Настройка рабочего режима предлагаемой системы осуществляется следующим образом. Для проведения цикла предварительной настройки используется выносной уголковый отражатель 39, который устанавливается в свое рабочее положение с помощью своего блока перемещения, как это показано на фиг. 1. Далее лазерный передатчик 13 генерирует импульс ЛИ на своей основной длине волны - на рабочей частоте ft лазерного передатчика 13. С выхода лазерного передатчика 13 импульс ЛИ проходит через третий управляемый ослабитель 22, отражается от отражательного зеркала 37, поступает на уголковый отражатель 39, от которого отражается строго в обратном направлении, далее импульс ЛИ поступает на оптический вход телескопа строго по направлению его оси, совпадающей с оптической осью O1-O2. Таким образом, импульс ЛИ имитирует принимаемый оптический сигнал на входе телескопа 1 на основной рабочей длине волны лазерного передатчика 13. Далее по этому контрольному сигналу (контрольному импульсу ЛИ) осуществляется настройка и тестирование работы всех трех приемных элементов системы - первого и второго фотоприемных блоков 23, 24 и телевизионной камеры 11. Первый фотоприемный 23 блок регистрирует интенсивность контрольного импульса ЛИ. На оптический вход второго фотоприемного блока 24 одновременно подается контрольный импульс ЛИ от лазерного гетеродина 14, который излучается одновременно с контрольным импульсом от лазерного передатчика 13. Частота импульса ЛИ fg от лазерного гетеродина 14 отличается от частоты ft на некоторую фиксированную величину Δ1. Эта величина дополнительного сдвига частоты fg импульса ЛИ может устанавливаться, как сдвигом (изменением) частоты генерации лазерного гетеродина 14, так и во втором блоке сдвига частоты ЛИ 18. Второй фотоприемный блок 24 регистрирует интерференционный сигнал (сигнал биений) между поступившими на его оптический вход первым контрольным импульсом ЛИ от лазерного передатчика 75 и вторым контрольным импульсом ЛИ от лазерного гетеродина 14. Образующийся электрический сигнал биений поступает на вход блока спектральных фильтров 25, в котором осуществляется измерение частоты биений Ωb, которая равна следующей величине:

Таким образом, в данном конкретном случае блок спектральных фильтров 25 измеряет величину сдвига частоты ЛИ Δ1, установленного в лазерном гетеродине 14, в блоке сдвига частоты ЛИ 18, или одновременно в обоих этих элементах. На оптический вход телевизионной камеры 11 поступает первый контрольный сигнал ЛИ с выхода телескопа 1. Данный импульс ЛИ проходит через лазерный усилитель 5, который вначале не накачивается и без изменений пропускает импульс ЛИ. На следующем этапе настройки осуществляется накачка лазерного усилителя 5 с помощью блока накачки 6. Одновременно на вход телевизионной камеры 11 поступает второй контрольный импульс ЛИ от лазерного гетеродина 14 через блоки сдвига частоты и сканирования ЛИ 16 и 17. При этом в блоке сдвига частоты ЛИ 16 устанавливается такой сдвиг частоты Δ2, который противоположен по знаку сдвигу частоты Δ1 в лазерном гетеродине 14 относительно частоты лазерного передатчика 13, в результате чего осуществляется компенсация сдвига частоты Δ1 и частота ЛИ, поступающая от лазерного гетеродина 14 на вход телевизионной камеры 11 от полупрозрачного зеркала 10 точно совпадает с частотой импульса ЛИ от лазерного передатчика 13:Δ2=-Δ1. Блок сканирования ЛИ 17 устанавливает некоторый фиксированный небольшой угол наклона второго контрольного импульса ЛИ относительно оптической оси O1-O2. В результате телевизионная камера 11 регистрирует голограмму, образующуюся от биений двух контрольных сигналов - импульсов ЛИ на оптическом входе телевизионной камеры 11. По этой контрольной голограмме осуществляется настройка режимов работы и регистрации телевизионной камеры 11. Далее осуществляют настройку и проверку функционирования системы в различных режимах при различном уровне усиления в лазерном усилителе 5, а также при различных частотах генерирования ЛИ в лазерном передатчике 13 и лазерном гетеродине 14. При этом осуществляют проверку функционирования при компенсации доплеровского сдвига с помощью изменения частоты генерирования ЛИ в лазерном передатчике 13 и в лазерном гетеродине 14, а также при изменении рабочей частоты приема и усиления ЛИ в лазерном усилителе 5 и в блоках сдвига частоты ЛИ 16 и 18. После завершения этапа предварительной настройки системы уголковый отражатель 39 выводится из системы посредством блока перемещения уголкового отражателя 40. На этом этап настройки системы завершается.
Далее основной этап работы предлагаемой системы осуществляется следующим образом.
Космический аппарат, на борту которого находится предлагаемая лазерная голографическая локационная система, приближается к выбранному для наблюдения космическому объекту (астероиду или элементу космического мусора) на минимально возможное расстояние (от 10 м до 10-100 км). При этом по имеющейся астрономической информации осуществляется по возможности уравнивание скоростей перемещения объекта наблюдения и космического аппарата, то есть осуществляется уменьшение относительной скорости перемещения космического аппарата относительно наблюдаемого объекта. Полное исключение взаимного перемещения космического аппарата и наблюдаемого объекта в общем случае невозможно. По имеющейся астрономической информации осуществляется наведение оптической оси телескопа 1 (совпадающей с осью O1-О2) на наблюдаемый объект. Далее лазерный передатчик 15 генерирует импульс ЛИ с некоторой оптической частотой ft. Импульс ЛИ излучается в направлении наблюдаемого объекта посредством отражательного зеркала 37, установленного в тени контррефлектора 38 телескопа 1. Отраженный от объекта импульс ЛИ улавливается телескопом 1 и с его выхода направляется на вход первого фотоприемного блока 23, который регистрирует прямое изображение наблюдаемого объекта, сформированное первым объективом 26. При этом первое выносное полупрозрачное зеркало 3 находится на оптической оси системы O1-О2, как это показано на фиг. 1. Второе выносное полупрозрачное зеркало 8 находится в состоянии вне оптической оси O1-О2. По разности моментов времени излучения импульса ЛИ лазерным передатчиком 15 и момента времени регистрации импульса принятого излучения в первом фотоприемном блоке 23 в блоке управления 12 осуществляют определение дальности до наблюдаемого объекта. Повторяют генерацию импульса ЛИ в передатчике 15 и определяют второй раз расстояние до наблюдаемого объекта через некоторый фиксированный небольшой промежуток времени. На основании этого в блоке управления 12 осуществляют предварительную оценку скорости движения наблюдаемого объекта относительно системы (космического аппарата с системой на борту). На основании этого осуществляют предварительную оценку доплеровского сдвига, который необходимо компенсировать при регистрации голограммы наблюдаемого объекта. Предварительно доплеровский сдвиг ΔD частоты может быть определен по имеющейся астрономической информации в отношении скорости υа перемещения наблюдаемого объекта по линии визирования, например, астероида, относительно космического аппарата с лазерной системой на борту:
ΔD=ft(2υа/с),
где с - скорость света; ft - частота генерации ЛИ в лазерном передатчике.
Далее осуществляют регистрацию импульса ЛИ, отраженного от объекта в гетеродинном режиме приема ЛИ с помощью второго фотоприемного блока 24. Импульс ЛИ генерируется лазерным передатчиком 13 в третий раз. При этом на оптический вход второго фотоприемного блока 24 поступает гетеродинный сигнал ЛИ от лазерного гетеродина 14, который проходит через второй блок сдвига частоты ЛИ 18 и через второй блок сканирования ЛИ 19. В результате на оптическом входе второго фотоприемного блока 24 образуется гетеродинный сигнал с некоторой известной установленной частотой fg1. С выхода телескопа 1 импульс ЛИ поступает на оптический вход второго фотоприемного блока 24 посредством первого выносного полупрозрачного зеркала 3, полупрозрачного зеркала 30 и второго объектива 27. В результате образуется сигнал биений (интерференции) между импульсом ЛИ от объекта и гетеродинным сигналом, который регистрируется одним или одновременно несколькими фоточувствительными элементами второго фотоприемного блока 24. В блоке спектральных фильтров 25 осуществляется измерение частоты Ωmes электрического сигнала биений. На основании этого измерения в блоке управления 12 осуществляют собственно определение сдвига частоты ЛИ при отражении от наблюдаемого объекта Δ, которое непосредственно необходимо скомпенсировать при регистрации голограммы наблюдаемого объекта. Далее осуществляют включение лазерного усилителя 5, осуществляют генерацию импульсов ЛИ в лазерном передатчике 13 и в лазерном гетеродине 14 и регистрируют образующуюся голограмму наблюдаемого объекта телевизионной камерой 11. При этом по сигналам от блока управления 12 осуществляют генерацию ЛИ с такими частотами, которые совместно с установленными сдвигами частот в блоках сдвига частот ЛИ 16 и 18 обеспечивают компенсацию измеренного доплеровского сдвига при регистрации голограммы в телевизионной камере 11. Управление всеми элементами системы и установление необходимых частот генерации ЛИ в лазерных передатчике 13 и гетеродине 14, установление соответствующей частоты приема ЛИ в лазерном усилителе 5, а также установление необходимых сдвигов частоты ЛИ в блоках сдвига частоты ЛИ 16 и 18 осуществляют по сигналам от блока управления 12. При этом в блоке управления 12 вырабатываются управляющие сигналы, которые обеспечивают следующие соотношения между частотами генерации и сдвига ЛИ, обеспечивающие усиление принимаемого ЛИ, отраженного от объекта наблюдения, в лазерном усилителе 5 и регистрацию голограммы в телевизионной камере 11:

где ft - частота генерации ЛИ в лазерном передатчике 13; ΔD - величина доплеровского сдвига (частоты), которая получена по результатам измерений в блоке спектральных фильтров 25.
Величина доплеровского сдвига частоты ΔD связана со скоростью υ1 движения наблюдаемого объекта вдоль линии визирования соотношением:
ΔD=ft(2υ1/c),
где с - скорость света.
Данное соотношение (2) определяет попадание частоты принимаемого ЛИ в полосу приема и усиления лазерного усилителя 5.
Далее в соотношении (2) fa обозначена частота приема и усиления принимаемого ЛИ в лазерном усилителе 5 в стандартном режиме лазерного усилителя 5.
Данное соотношение выполняется при работе лазерного усилителя 5 в его основном стандартном режиме приема без использования сдвига частоты полосы приема непосредственно в самом лазерном усилителе 5. При использовании сдвига полосы приема в лазерном усилителе 5 используется следующее соотношение вместо (2):

где величина Δа определяет сдвиг полосы приема в лазерном усилителе 5 относительно его стандартной частоты приема fa.
Следующее выполняемое соотношение:

где fg - частота гетеродинного сигнала ЛИ, генерируемого в лазерном гетеродине 14; Δbl1 - величина сдвига частоты ЛИ в первом блоке сдвига частоты ЛИ 16, осуществляемая при прохождении гетеродинного сигнала ЛИ через первый блок сдвига частоты ЛИ 16.
При выполнении соотношения (4) частота опорного ЛИ, поступающего на оптический вход телевизионной камеры 11 с выхода первого блока сканирования ЛИ 11 и посредством полупрозрачного зеркала 10, совпадает с частотой сигнала ЛИ от наблюдаемого объекта, которое поступает на вход телевизионной камеры 11 с оптического выхода лазерного усилителя 5. Данное соотношение является основным при регистрации голограммы и определяет равенство оптических частот лазерных излучений (объектного и опорного лазерных пучков) при формировании и регистрации голограммы. Соотношения (2) и (3) определяют попадание частоты принимаемого ЛИ от объекта наблюдения в полосу приема и усиления ЛИ в лазерном усилителе 5. Таким образом, при установлении указанных соотношений относительно основных параметров элементов системы реализуется режим регистрации голограммы удаленного наблюдаемого объекта при компенсации доплеровского сдвига частоты принимаемого ЛИ.
Полученная и зарегистрированная голограмма наблюдаемого объекта с выхода телевизионной камеры 11 поступает в блок управления 12, где осуществляется обработка голограммы в цифровом виде, восстановление изображения с голограммы и другие действия.
В процессе приема ЛИ от объекта, регистрации голограммы и дальнейшего наблюдения объекта осуществляется непрерывное измерение доплеровского сдвига частоты ЛИ во втором фотоприемном блоке 24 и в блоке спектральных фильтров 25. Собственно измерение частоты доплеровского сдвига ΔD осуществляется в блоке управления 12 на основании следующего соотношения:

где Ωmes - частота сигнала биений гетеродинного приема на выходе второго фотоприемного блока 24, измеренная в блоке спектральных фильтров 25; Δbl2 - величина сдвига частоты ЛИ гетеродинного сигнала ЛИ, осуществляемая во втором блоке сдвига частоты ЛИ 15 при прохождении гетеродинного сигнала через этот блок, устанавливаемая по сигналам от блока управления 12, как это было отмечено ранее.
Данная величина сдвига частоты ЛИ в блоке сдвига 15 выбирается и устанавливается в блоке управления 12 из следующего условия: измеряемая частота биений Ωmes не должна превышать максимальной измеряемой частоты в блоке спектральных фильтров 25. При очень большом доплеровском сдвиге увеличивают величину сдвига частоты в блоке 18, в результате чего снижается величина измеряемой частоты биений, как это видно из формулы (5). Отсюда получаем следующую оценку величины частоты доплеровского сдвига ΔD, непрерывно получаемую в блоке управления 12:

В соотношении (6) присутствует разность частот (fg-ft) ЛИ лазерного передатчика 13 и лазерного гетеродина 14. Данная величина непрерывно (с каждым импульсом ЛИ) измеряется в измерителе частоты ЛИ 15 и поступает в блок управления 12. На основании полученной оценки доплеровского сдвига осуществляют непрерывную подстройку устанавливаемых параметров элементов системы при небольших возможных изменениях относительной скорости движения наблюдаемого объекта. При необходимости может быть установлена и использована величина доплеровского сдвига, полученная на основании прогнозируемого изменения скорости движения наблюдаемого объекта в блоке управления 12. Одновременно в блоке управления 12 осуществляют установление величин пропускания ЛИ в управляемых ослабителях 20, 21 и 22 для обеспечения необходимого ослабления интенсивности импульсов ЛИ, генерируемых лазерными передатчиком 13 и гетеродином 14. Блоки сканирования ЛИ 17 и 19 осуществляют по командам от блока управления 12 изменение и корректировку углов падения ЛИ от лазерного гетеродина 14 на оптические входы телевизионной камеры 11 и второго фотоприемного блока 24.
В предлагаемой системе помимо регистрации голограммы наблюдаемого объекта регистрируется также дополнительная информация об объекте. Первый фотоприемный блок 23 регистрирует прямое изображение объекта. При необходимости дополнительно блок 23 регистрирует изображение объекта, полученное после усиления в лазерном усилителе 5. Для получения такого усиленного изображения объекта первое выносное полупрозрачное зеркало 3 выносится из системы, а второе выносное полупрозрачное зеркало 8 устанавливается на оптической оси системы, как это показано на фиг. 1. Усиленный импульс ЛИ с оптического выхода лазерного усилителя 5 поступает на вход объектива 27 посредством выносного полупрозрачного зеркала 8 и полупрозрачного зеркала 29. Объектив 26 строит на оптическом входе первого фотоприемного блока 23 оптическое усиленное изображение наблюдаемого объекта, которое с выхода блока 23 поступает в блок управления 12. Второй фотоприемный блок 24 работает в режиме гетеродинного приема сигнала ЛИ, отраженного от объекта, и регистрирует доплеровский портрет изображения объекта. Для получения этой информации первое выносное полупрозрачное зеркало 3 устанавливается на оптической оси системы, как это показано на фиг. 1. Второй фотоприемный блок 24 представляет собой фотоприемную матрицу чувствительных элементов, выходы которых через электронные усилители подключены к блоку спектральных фильтров 25. Объектив 27 формирует на этой фотоприемной матрице изображение объекта. Для измерения скорости движения объекта - доплеровского сдвига используется центральный элемент фотоприемной матрицы блока 24. Остальные элементы при вращении объекта регистрируют доплеровский портрет изображения объекта, информация о котором с выхода блока спектральных фильтров 25 поступает в блок управления 12 для дальнейшего анализа. Доплеровский портрет объекта содержит информацию о различных величинах доплеровского сдвига отдельных точек изображения объекта при его вращении. При отсутствии вращения наблюдаемого объекта все точки его изображения имеют одинаковый доплеровский сдвиг частоты принимаемого ЛИ. Таким образом, в блок управления 12 помимо голограммы наблюдаемого объекта поступает прямое изображение объекта, усиленное в лазерном усилителе 5 изображение объекта, а также доплеровский портрет изображения объекта. В блоке управления 12 осуществляют восстановление изображения с полученной голограммы, после чего осуществляют сравнение и обработку полученных изображений наблюдаемого космического объекта, на чем рабочий цикл системы завершается.
В предлагаемой лазерной голографической локационной системе возможна регистрация так называемой безопорной голограммы. Данный вид голограммы формируется без опорного пучка. Для этого при регистрации телевизионной камерой 11 сигнала ЛИ с выхода лазерного усилителя 5 опорный лазерный пучок от лазерного гетеродина 14 на вход телевизионной камеры 12 не подается. Это может быть достигнуто выключением на этот момент времени лазерного гетеродина 14, или полным перекрытием проходящего светового потока в управляемом ослабителе 20. Для регистрации безопорной голограммы в телевизионной камере 11 нет необходимости компенсации доплеровского сдвига в принимаемом от объекта ЛИ. При восстановлении такой безопорной голограммы в блоке управления 12 формируется симметричное изображение объекта - так называемая автосвертка. Данное изображение в виде автосвертки истинного изображения объекта также несет полезную информацию об объекте, позволяет определить максимальные размеры наблюдаемого объекта. Следует отметить, что безопорная голограмма и получаемое на ее основе изображение объекта в виде автосвертки не подвержено влиянию атмосферных искажений при наблюдении с земной поверхности. Безопорную голограмму и восстанавливаемое с нее изображение можно зарегистрировать до осуществления компенсации доплеровского сдвига частоты и обеспечить этим предварительную настройку лазерной системы по оценке получаемого симметричного изображения объекта без выполнения операции определения и компенсации доплеровского сдвига частоты. В целом это повышает эффективность работы предлагаемой лазерной системы.
Предлагаемая лазерная голографическая локационная система содержит элементы, выпускаемые промышленностью. Одним из основных элементов системы является лазерный усилитель 5. В качестве лазерного усилителя в системе может быть использован газовый лазерный усилитель на атомарном йоде фотодиссоционного типа [6], имеющий общепринятое наименование - активный квантовый фильтр. Данный лазерный усилитель имеет высокую квантовую чувствительность, узкую полосу пропускания, необходимую для формирования голограммы, высокий коэффициент усиления при сохранении фазовых соотношений в усиливаемом ЛИ, что и обеспечило успешное применение данного лазерного усилителя в системах для формирования голограмм. Дополнительно данный лазерный усилитель обладает возможностью изменения частоты приема и усиления ЛИ, т.е. возможностью сдвига полосы приема ЛИ по частотной оси в относительно больших пределах. Подробно устройство и принцип действия и применения лазерного усилителя - активного квантового фильтра изложены в [6] и в монографии авторов [7]. Данный квантовый усилитель занесен также в книгу рекордов России [8], [9]. В предлагаемой системе изменение частоты полосы приема лазерного усилителя осуществляется для компенсации малых доплеровских сдвигов. При компенсации средних и больших доплеровских сдвигов частоты при наблюдении быстро движущихся астероидов лазерный усилитель 5 используется в стандартном режиме работы, при этом смещение его частоты приема не осуществляется. В этом случае для компенсации доплеровских сдвигов частоты применяется изменение частоты генерации в лазерном передатчике и смещение частот проходящего ЛИ в блоках сдвига частоты ЛИ.
В качестве лазерного передатчика 13 и лазерного гетеродина 14 также могут быть использованы лазерные йодные генераторы, аналогичные лазерному усилителю по составу рабочего вещества и общему устройству [7]. В состав лазерного гетеродина входит расширитель пучка ЛИ, обеспечивающий увеличение сечения пучка ЛИ до размеров приемной площадки телевизионной камеры 11, на которую в дальнейшем поступает излучение лазерного гетеродина. В состав лазерного передатчика также входит расширитель лазерного пучка (коллиматор) для формирования ЛИ для подсвета наблюдаемого объекта. В качестве телевизионной камеры 11 может быть использована современная передающая телекамера, например, ПЗС-камера с большим количеством чувствительных элементов (1000×1000). В качестве первого и второго фотоприемных блоков могут быть использованы высокочувствительные многоэлементные матрицы полупроводникового типа или матрицы фотоэлементов. Блоки сканирования и сдвига частоты ЛИ могут быть выполнены на основе акусто-оптических ячеек [10], выпускаемых промышленностью. Схема и принцип работы блока сдвига частоты импульсов ЛИ приведены в [5]. Изложение принципа работы блока спектральных фильтров 25 также приведено в [5]. В качестве блока управления 12 может быть использована современная высокопроизводительная ЭВМ, которая обеспечивает управление работой всех элементов системы, обработку зарегистрированных голограмм и изображений и, при необходимости, подготовку полученного объема информации для передачи на Землю. В настоящее время вопросы цифровой обработки голограмм и восстановления изображений хорошо освещены в современных научных исследованиях [11]. Хорошо освещены также вопросы регистрации и передачи голограмм по телевизионному каналу [12], восстановления голограмм и их обработка различными цифровыми и оптическими средствами [13]. Поэтому не существует каких-либо проблем в вопросе регистрации, обработки, восстановлении голограмм и изображений цифровыми средствами. До настоящего времени сложной проблемой была регистрация голограмм удаленных объектов, решение которой предложено в настоящем изобретении.
Следует отметить возможность решения еще одной проблемы при использовании предлагаемой лазерной голографической системы для наблюдения за удаленными космическими объектами с Земной поверхности через турбулентную атмосферу. В этом случае возникает проблема компенсации турбулентности атмосферы для обеспечения высокого разрешения при формировании изображений наблюдаемых космических объектов. Разрешающая способность систем наблюдения за космическими объектами с земной поверхности ограничена атмосферной турбулентностью, которая вносит в приходящий от объекта световой поток фазовые искажения. Основной характеристикой фазовых искажений атмосферы является размер той области в плоскости приемной апертуры приемного телескопа, в пределах которой флуктуации принимаемого светового поля являются независимыми. Размер этой области при стандартной атмосфере в приземном слое составляет порядка: rc=30-40 сантиметров. Если размер этой области rc больше диаметра Dr входной апертуры приемного телескопа rc>Dr, то реализуется угловое разрешение при наблюдении космического объекта, соответствующее данной оптической системе с диаметром апертуры телескопа Dr. Если диаметр апертуры телескопа больше размера области rc:Dr>rc, то угловое разрешение оптической системы оказывается хуже дифракционного разрешения данного телескопа и определяется размерами (диаметром) области rc корреляции атмосферных флуктуаций в приземном слое атмосферы. Поэтому оптические телескопы с большими диаметрами приемной апертуры (порядка нескольких метров) обладают угловой разрешающей способностью, соответствующей приемному телескопу с диаметром апертуры, равной диаметру области rc корреляции атмосферных флуктуаций Dr1=rc. Таким образом, приемные телескопы с большими диаметрами неспособны обеспечить высокую угловую разрешающую способность при наблюдении за космическими объектами с земной поверхности и только увеличивают общую чувствительность приемной системы наблюдения. Поэтому для увеличения угловой разрешающей способности больших телескопов используются адаптивные оптические средства [14], обеспечивающие компенсацию фазовых искажений атмосферы в плоскости приемной апертуры телескопа (в сопряженной плоскости), обеспечивающие указанную компенсацию до регистрации собственно изображения космического объекта, т.е. обеспечивающие до детекторную компенсацию атмосферных искажений. Такие адаптивные оптические средства представляют собой различные секционированные отражательные зеркала, управляемые специальными быстродействующими устройствами перемещения или изгиба секционированных зеркал и установленные в сопряженной плоскости приемной апертуры телескопа. Однако применение этих адаптивных оптических элементов является ограниченным и малоэффективным, что обусловлено малым временем корреляции атмосферных флуктуаций τс, которое составляет порядка нескольких миллисекунд (время «замороженности атмосферы»). За это время адаптивная оптическая до детекторная система в виде, например, секционированного зеркала должна обеспечить подбор компенсирующего фазового распределения при последовательной работе каждого элемента и выборе оптимального профиля изгиба зеркала по некоторому критерию, например, максимизации интенсивности наблюдаемого изображения объекта.
Предлагаемая лазерная голографическая система обеспечивает регистрацию голограммы удаленного космического объекта при наблюдении с земной поверхности. При этом регистрируется и сохраняется информация об объемном изображении объекта, а также информация о фазовых атмосферных искажениях в плоскости апертуры телескопа, существовавших в момент регистрации голограммы. Далее полученная голограмма в цифровом виде поступает в блок управления 12, представляющий собой высокопроизводительную современную ЭВМ. Здесь по специальной программе до восстановления изображения наблюдаемого объекта осуществляется обработка голограммы, заключающаяся во внесении в цифровой форме компенсирующих фазовых предискажений в пространственный двумерный спектр изображения объекта, подбор компенсирующих фазовых предискажений до полной компенсации фазовых атмосферных искажений в реализации зарегистрированной голограммы. При этом не существует ограничений в плане ограниченного времени корреляции атмосферных флуктуаций, так как вся реализация атмосферных флуктуаций зарегистрирована при регистрации голограммы одновременно с информацией об изображении объекта. Существует лишь требование, чтобы длительность импульса ЛИ τр при регистрации голограммы не превышала времени корреляции атмосферных флуктуаций τс:τр<τс. Данное требование легко выполняется автоматически, так как длительность импульса ЛИ, формируемого лазерным передатчиком составляет доли микросекунды и значительно меньше времени корреляции атмосферных флуктуаций.
Таким образом, при цифровой обработке зарегистрированной в предлагаемой системе голограммы осуществляется полная компенсация атмосферных искажений и восстановление высококачественного изображения космического объекта с угловой разрешающей способностью, соответствующей диаметру апертуры приемного телескопа Dr, значительно превышающей диаметр области корреляции атмосферных флуктуаций Dr>rc. Таким образом, предлагаемая лазерная система обладает возможностью компенсации атмосферных искажений при использовании больших приемных телескопов без использования дорогостоящей и малоэффективной специальной адаптивной оптики, а также вообще без каких-либо дополнительных средств в составе предлагаемой лазерной системы, кроме использования специальной дополнительной программы для обработки голограммы от объектов, наблюдаемых с земной поверхности. Создание таких программных средств в цифровой голографии известно и освоено в современных научных исследованиях [11]. Предлагаемая лазерная система обеспечивает использование этих программных средств для решения новой для цифровой голографии задачи - обработки голограмм и восстановления изображений космических объектов и реализации высокого углового разрешения при использовании больших астрономических телескопов.
По материалам представленной заявки на изобретение проведен цикл теоретических и экспериментальных работ, представленных в монографии авторов [7]. На фиг. 2 представлен результат получения изображения объекта после усиления импульсного сигнала ЛИ в лазерном усилителе - активном квантовом фильтре [6]. При этом было экспериментально доказано сохранение фазовых соотношений в усиливаемом лазерном сигнале и возможность регистрации голограммы. На фиг. 3 представлено изображение тест-объекта, полученное при обработке голограммы [13].
В предлагаемой лазерной голографической локационной системе следует выделить следующие факторы новизны.
1. Следует отметить реализацию возможности получения и регистрации голограмм удаленных движущихся космических объектов на основе использования лазерного усилителя - активного квантового фильтра, обладающего уникальными возможностями по обеспечению высокой чувствительности на уровне квантового предела, высокой помехозащищенностью при одновременном сохранении фазовой структуры усиливаемого оптического приемного сигнала. Одновременно с используемым лазерным усилителем для усиления объектного голографического сигнала используется лазерный гетеродинный прием сигнала от наблюдаемого объекта для измерения и компенсации доплеровского сдвига с используемыми известными методами лазерного гетеродинирования [15]. Собственно, компенсация доплеровского сдвига при наличии движения наблюдаемого объекта реализуется известными средствами акустооптики, а также дополнительно путем смещения частот генерирования ЛИ в лазерных передатчике и гетеродине и путем сдвига частоты приема и усиления ЛИ в лазерном усилителе - активном квантовом фильтре. Это обеспечивает регистрацию голограммы движущегося космического объекта и восстановление изображения методами цифровой оптики и голографии в используемом современном компьютере. Можно отметить, что изложенная совокупность действий и элементов лазерной системы, реализующей действия, представлена впервые, обладает новизной и позволяет впервые реализовать указанный эффект регистрации голограммы движущегося космического объекта.
2. Вторым фактором можно отметить новизну собственно применения данной предлагаемой лазерной системы для регистрации голограммы космического объекта и восстановления высококачественного изображения при использовании предлагаемой лазерной системы для наблюдений за космическими объектами непосредственно с земной поверхности через приземный слой атмосферы. При этом в результате регистрации голограммы фиксируется информация не только об изображении объекта, но также регистрируется информация о фазовых искажениях атмосферы в момент регистрации голограммы. При восстановлении изображения с голограммы цифровыми методами обеспечивается компенсация этих фазовых искажений и реализация высокой угловой разрешающей способности в изображении наблюдаемого объекта, соответствующая угловой разрешающей (дифракционной) способности приемного телескопа большого диаметра, превышающего диаметр зоны (области) корреляции атмосферных фазовых искажений многократно. Такой эффект достигается без использования каких-либо дополнительных элементов или блоков в предлагаемой лазерной системе, а только за счет использования специального дополнительного программного обеспечения. При этом достигаемый эффект увеличения разрешающей способности превышает величину повышения разрешения телескопов при использовании современной сложной и дорогостоящей адаптивной астрономической оптики. Данный результат при использовании предлагаемой лазерной системы также достигается впервые и не имеет аналогов в научной литературе по адаптивной оптике и системам наблюдения космических объектов.
Предлагаемая лазерная голографическая локационная система вследствие высокой эффективности и указанных свойств найдет применение в системах контроля и наблюдения космического пространства и в наземных оптических наблюдательных системах, в том числе и для замены используемых систем адаптивной оптики.
Источники информации.
1. Авторское свидетельство СССР №944437, опубл. 20.04.1995, бюл. №11.
2. Патент США №3889226, кл. 340-54.
3. Авторское свидетельство СССР №1265688, опубл. 23.10.1986, бюл. №39.
4. Патент РФ №2152056, опубл. 27.06.2000, бюл. №18.
5. Патент РФ №2575766 опубл. 20.02.2016, бюл. №5.
6. Патент РФ №2133533, опубл. 30.09.1997, бюл. №20.
7. Носач О.Ю., Манкевич С.К., Орлов Е.П. Лазерная локация и космическая связь на йодных лазерах, Саарбрюкен, Германия, 2015, стр. 217.
8. Книга рекордов России. Сертификат №00874 (2015 г.). Наибольшая помехозащищенность приема оптического сигнала. Авторы: Манкевич С.К. Носач О.Ю., Орлов Е.П.
9. Книга рекордов России. Сертификат №00875 (2015 г.). Наибольшая чувствительность приема оптического сигнала. Авторы: Манкевич С.К., Носач О.Ю., Орлов Е.П.
10. Балакший В.И., Парыгин В.Н., Чирков Л.Е. Физические основы акустооптики, Москва, Радио и связь, 1985.
11. Ярославский Л.П., Мерзляков Н.С. Цифровая голография, Москва, Наука, 1982.
12. Манкевич С.К., Матвеев И.Н. О чувствительности голографической телевизионной системы. Техника средств связи, серия Техника телевидения, вып. 3 (17), Москва, 1979, стр. 36-44.
13. Манкевич С.К. и др. Применение электронно-лучевой трубки в голографическом телевидении, Техника кино и телевидения, №10, 1979.
14. Воронцов М.А., Шмальгаузен В.И. Принципы адаптивной оптики, Москва, Наука, 1985.
15. Протопопов В.В., Устинов Н.Д. Лазерное гетеродинирование, Москва, Наука, 1985, стр. 288.
| название | год | авторы | номер документа |
|---|---|---|---|
| Лазерный голографический локатор | 2023 |
|
RU2812809C1 |
| ЛАЗЕРНАЯ ГОЛОГРАФИЧЕСКАЯ ПРИЕМНАЯ СИСТЕМА | 2022 |
|
RU2799499C1 |
| ЛАЗЕРНЫЙ ЛОКАТОР | 2014 |
|
RU2575766C1 |
| СПОСОБ ЛАЗЕРНОЙ КОСМИЧЕСКОЙ СВЯЗИ И КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2380834C1 |
| ЛАЗЕРНОЕ ПРИЕМНОЕ УСТРОЙСТВО | 2015 |
|
RU2584185C1 |
| ЛАЗЕРНАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ТЕПЛОНОСИТЕЛЯ В ЭНЕРГЕТИЧЕСКОМ ЯДЕРНОМ РЕАКТОРЕ | 2019 |
|
RU2705725C2 |
| СИСТЕМА ИЗМЕРЕНИЯ КОНЦЕНТРАЦИИ БОРНОЙ КИСЛОТЫ В ПЕРВОМ КОНТУРЕ ТЕПЛОНОСИТЕЛЯ ЯДЕРНОГО ЭНЕРГЕТИЧЕСКОГО РЕАКТОРА | 2015 |
|
RU2594364C2 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ И ЛОКАЦИОННОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2249234C1 |
| Система измерения концентрации борной кислоты в контуре теплоносителя энергетического ядерного реактора | 2015 |
|
RU2606369C1 |
| ЛАЗЕРНОЕ УСТРОЙСТВО КОНТРОЛЯ ОКОЛОЗЕМНОГО КОСМИЧЕСКОГО ПРОСТРАНСТВА | 2012 |
|
RU2502647C1 |
Изобретение относится к области лазерной техники и касается голографической локационной системы. Система содержит телескоп с блоком наведения, лазерные передатчик, гетеродин, лазерный усилитель с блоками накачки и управления, измеритель частоты лазерного излучения, блоки сканирования лазерного излучения, блоки сдвига частоты лазерного излучения, блок спектральных фильтров, управляемые ослабители, объективы, выносные полупрозрачные зеркала, блоки перемещения выносных полупрозрачных зеркал, полупрозрачные и отражательные зеркала, уголковый отражатель, блок перемещения уголкового отражателя, фотоприемные блоки, блок управления и телевизионную камеру. Технический результат заключается в обеспечении высокой чувствительности локационной системы. 4 з.п. ф-лы, 3 ил.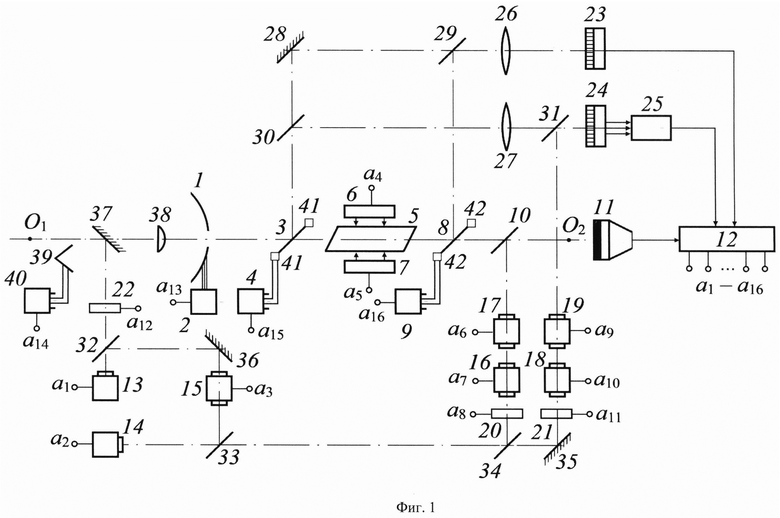
1. Лазерная голографическая локационная система, содержащая последовательно установленные на оптической оси оптически связанные телескоп с блоком наведения, первое выносное полупрозрачное зеркало с блоком перемещения, лазерный усилитель с блоками накачки и управления лазерным усилителем, второе выносное полупрозрачное зеркало с блоком перемещения, первое полупрозрачное зеркало и телевизионную камеру, подключенную к блоку управления, а также лазерный передатчик, лазерный гетеродин и измеритель частоты лазерного излучения, первый и второй блоки сдвига частоты лазерного излучения, первый и второй блоки сканирования лазерного излучения, первый, второй и третий управляемые ослабители и первый фотоприемный блок, подключенные к блоку управления, второй фотоприемный блок и подключенный к его выходу блок спектральных фильтров, выходом подключенный к блоку управления, первый и второй объективы, второе - седьмое полупрозрачные зеркала, первое - четвертое отражательные зеркала, уголковый отражатель с блоком перемещения, при этом оптический выход телескопа связан с оптическим входом первого фотоприемного блока посредством оптически последовательно связанных первого выносного полупрозрачного зеркала, первого отражательного зеркала и первого объектива, одновременно оптический выход телескопа оптически связан с оптическим входом второго фотоприемного блока посредством последовательно оптически связанных первого выносного полупрозрачного зеркала, третьего полупрозрачного зеркала и второго объектива, оптический выход лазерного гетеродина оптически связан с оптическим входом первого управляемого ослабителя посредством седьмого полупрозрачного зеркала, оптический выход первого управляемого ослабителя оптически связан с оптическим входом первого блока сдвига частоты лазерного излучения, оптический выход которого связан с оптическим входом первого блока сканирования лазерного излучения, оптический выход которого связан с оптическим входом телевизионной камеры посредством первого полупрозрачного зеркала, оптический выход лазерного гетеродина оптически связан с оптическим входом второго фотоприемного блока посредством последовательно оптически связанных второго отражательного зеркала, второго управляемого ослабителя, второго блока сдвига частоты лазерного излучения, второго блока сканирования лазерного излучения и четвертого полупрозрачного зеркала, одновременно оптический выход лазерного гетеродина оптически связан с первым оптическим входом измерителя частоты лазерного излучения посредством шестого полупрозрачного зеркала, оптический выход лазерного передатчика оптически связан с оптическим входом третьего управляемого ослабителя, оптический выход которого оптически связан с четвертым отражательным зеркалом, установленным в оптической тени контррефлектора телескопа, одновременно оптический выход лазерного передатчика оптически связан со вторым оптическим входом измерителя частоты лазерного излучения посредством пятого полупрозрачного зеркала и третьего отражательного зеркала, уголковый отражатель установлен перед телескопом со смещением относительно оптической оси телескопа, блок перемещения уголкового отражателя подключен к блоку управления, к которому подключены также блок наведения телескопа, блоки перемещения первого и второго выносных полупрозрачных зеркал, блоки накачки и управления лазерным усилителем, оптический выход лазерного усилителя оптически связан с оптическим входом первого фотоприемного блока посредством второго выносного полупрозрачного зеркала, второго полупрозрачного зеркала и первого объектива.
2. Система по п. 1, характеризующаяся тем, что в ней лазерный передатчик и лазерный гетеродин выполнены на основе лазерных генераторов с возможностью перестройки частоты генерируемого лазерного излучения.
3. Система по п. 1, характеризующаяся тем, что в ней лазерный усилитель выполнен с возможностью перестройки частоты усиливаемого лазерного излучения.
4. Система по п. 1, характеризующаяся тем, что в ней блок сканирования лазерного излучения выполнен на основе акустооптической ячейки, предназначенной для возбуждения ультразвуковых волн, обеспечивающих изменение направления распространения проходящего через ячейку лазерного излучения.
5. Система по п. 1, характеризующаяся тем, что в ней блок сдвига частоты лазерного излучения выполнен на основе акустооптической ячейки, предназначенной для возбуждения ультразвуковых волн, обеспечивающих изменение частоты проходящего через ячейку лазерного излучения.
| ЛАЗЕРНЫЙ ЛОКАТОР | 2014 |
|
RU2575766C1 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2152056C1 |
| US 10502951 B2, 10.12.2019 | |||
| US 9541635 B2, 10.01.2017. | |||

