Изобретение относится к области лазерной локации и квантовой электроники и предназначено для использования в лазерных локационных системах и комплексах с целью обнаружения движущихся объектов и определения параметров их движения, включая пространственные координаты и скорость движения. Предлагаемое устройство может также быть использовано в системах лазерной космической связи для осуществления связи с космическим кораблем в ближнем или дальнем космосе, а также для осуществления связи с космическим кораблем при осуществлении его посадки на Землю через слой плазмы, окружающей космический корабль. Предлагаемое устройство относится к классу лазерных систем, использующих метод лазерного гетеродинирования при приеме и обработке лазерных локационных сигналов. Данный метод приема лазерных сигналов известен и исследован в научной литературе, где отмечены некоторые преимущества этого метода по сравнению с методом прямого фотодетектирования лазерных сигналов. Однако ряд недостатков при практической реализации лазерного гетеродинирования не позволял в полной мере использовать потенциальные возможности данного метода для создания эффективных лазерных локационных систем широкого применения. Основным техническим недостатком указанного метода лазерного гетеродинирования является необходимость высокоточного согласования волновых фронтов принимаемого лазерного излучения (ЛИ) и излучения лазерного гетеродина на фоточувствительной площадке приемного фотодетектора. В монографии [1] на стр. 156 показано, что при наличии углового рассогласования величиной порядка 12 угловых минут принимаемого и гетеродинного лазерных излучений сигнал на выходе фотоприемника - фотосмесителя на промежуточной частоте уменьшается в пять раз по сравнению с уровнем сигнала при нулевом угловом рассогласовании. Такая зависимость уровня выходного сигнала приводит к сильным флуктуациям и периодическому полному пропаданию выходного сигнала, уменьшению вероятности обнаружения наблюдаемых объектов и снижению эффективности работы лазерной системы приема в реальных условиях слежения за быстро движущимися объектами.
Известен лазерный дальномер с гетеродинной схемой обработки по патенту Германии (з. №2819320) [2], содержащий лазер, генератор тактовых импульсов, приемо-передающую оптическую систему, лазерный гетеродин, оптический смеситель принимаемого лазерного излучения с излучением гетеродина, фотодетектор, блок усиления и обработки сигналов промежуточной частоты с выхода фото детектора, блок памяти и обработки информации. К недостаткам данного устройства следует отнести низкую эффективность и невысокую обнаружительную способность устройства при его работе в реальных условиях наблюдения за движущимися объектами при наличии различных фоновых помех на входе приемной оптической системы. Указанные недостатки обусловлены значительной зависимостью уровня сигнала промежуточной частоты (сигнала фотосмешения) от согласования углов падения на площадку фотодетектора излучения гетеродина и принимаемого лазерного излучения. При осуществлении слежения за быстро движущимся объектом угол падения принимаемого лазерного излучения подвержен непрерывным изменениям, что приводит к значительным флуктуациям уровня величины сигнала промежуточной частоты на выходе фотодетектора и снижению этого уровня, вследствие чего уменьшается вероятность правильного обнаружения объекта, снижается точность определения параметров движения объекта и эффективность работы всего устройства в целом.
Известен лазерный локатор с гетеродинным методом приема лазерных сигналов разработки США, приведенный в книге Лазерная локация [3] на стр. 230, содержащий приемо-передающий телескоп, лазерный передатчик с каскадами лазерного усиления, лазерный гетеродин, фотоприемный блок с блоком усиления, задающий лазерный генератор, второй фотодетектор, блок измерения и контроля частоты, блок обработки информации и управления. К недостаткам данного комплекса следует отнести низкую эффективность работы при значительной сложности комплекса. В комплексе отсутствуют средства, обеспечивающие непрерывное согласование углов падения на фотоприемный блок лазерного излучения гетеродина и принимаемого лазерного излучения, отраженного от сопровождаемого быстро движущегося объекта. В результате возможных изменений угла падения на площадку фотоприемника принимаемого лазерного излучения в рабочем режиме обнаружения и сопровождения объекта происходит динамическое рассогласование указанных углов падения, приводящее к сильным дополнительным флуктуациям уровня сигнала промежуточной частоты и к полному пропаданию сигнала и срыва обнаружения и сопровождения объекта. В данном комплексе использована система подстройки частоты генерации (длины волны) излучения задающего лазерного генератора (лазерного передатчика). Однако использованный метод подстройки длины волны генерации лазера с помощью внутрирезонаторного пьезокорректора не обладает необходимой точностью, что дополнительно снижает точность и эффективность работы лазерного локатора.
В качестве прототипа выбран лазерный локатор с импульсным режимом излучения, схема которого приведена в книге Лазерная локация [4] на стр. 245. Данный лазерный локатор содержит приемный и передающий телескоп с блоком наведения (сканирования), объектив, фотоприемный блок, блок обработки сигналов и управления, лазерный передатчик, лазерный гетеродин, блок измерения частоты, фиксированные ослабители -поглотители излучения, светоделители. К недостаткам данного устройства следует отнести низкую эффективность работы по реальным движущимся объектам, а также невысокую вероятность правильного обнаружения движущегося объекта вследствие наличия рассогласования углов падения на площадку фотоприемного блока принимаемого лазерного излучения и излучения гетеродина в режиме обнаружения и динамического сопровождения движущихся объектов.
Достигаемым техническим результатом является следующее: уменьшение зависимости уровня выходного сигнала от изменений угла прихода принимаемого лазерного излучения (ЛИ), повышение эффективности работы системы лазерной локации в условиях обнаружения и слежения за движущимися объектами и при наличии сильных фоновых засветок, повышение вероятности правильного обнаружения наблюдаемых объектов, реализация устойчивой лазерной связи с космическим кораблем через слой окружающей плазмы при входе в плотные слои атмосферы во время посадки космического корабля на Землю.
Новый технический результат достигается следующим образом.
1. В лазерный локатор, содержащий последовательно установленные на первой оптической оси телескоп с блоком наведения, первый объектив, первый фотоприемный блок, выход которого подключен к блоку спектральных фильтров, выходами подсоединенный к блоку управления, лазерный передатчик, лазерный гетеродин и блок измерения частоты, выход лазерного передатчика оптически связан с телескопом и, посредством полупрозрачного и отражательного зеркал, с первым оптическим входом блока измерения частоты, второй оптический вход которого оптически связан посредством полупрозрачного зеркала с оптическим выходом лазерного гетеродина, управляющие входы лазерного передатчика, лазерного гетеродина и выход блока измерения частоты подключены к блоку управления, введены последовательно оптически связанные первый управляемый ослабитель, первый блок сдвига частоты лазерного излучения, первый блок сканирования лазерного излучения, оптический выход которого посредством отражательного и двух полупрозрачных зеркал оптически связан с оптическим входом первого фотоприемного блока, последовательно оптически связанные второй управляемый ослабитель, второй блок сдвига частоты лазерного излучения, второй блок сканирования лазерного излучения, оптический выход которого посредством двух полупрозрачных зеркал оптически связан с оптическим входом первого фотоприемного блока, оптические входы первого и второго управляемых ослабителей оптически связаны посредством полупрозрачных зеркал с оптическим выходом лазерного гетеродина, последовательно оптически связанные третий управляемый ослабитель, третий блок сдвига частоты лазерного излучения и третий блок сканирования лазерного излучения, последовательно установленные на второй оптической оси оптически связанные акустооптический модулятор с блоком управления, второй объектив, первое полупрозрачное зеркало, управляемый пространственный фильтр, третий объектив, второе полупрозрачное зеркало, второй фотоприемный блок, выход которого подсоединен к входу второго блока спектральных фильтров, подключенного к блоку управления, оптический вход акустооптического модулятора оптически связан посредством отражательного зеркала и полупрозрачного зеркала с оптическим выходом лазерного гетеродина, оптический выход третьего блока сканирования лазерного излучения оптически связан посредством отражательного зеркала и второго полупрозрачного зеркала с оптическим входом второго фотоприемного блока, оптический вход третьего управляемого ослабителя оптически связан с оптическим выходом лазерного гетеродина, третий фотоприемный блок, оптический вход которого связан посредством первого полупрозрачного зеркала с оптическим выходом второго объектива, а выход подсоединен к блоку управления фотоприемным блоком, подключенного к блоку управления, первое и второе выносные зеркала, механически связанные с блоком перемещения, управляющий вход которого подключен к блоку управления, динамический спектральный фильтр, оптический вход которого посредством первого сканирующего зеркала и первого выносного зеркала оптически связан с оптическим выходом телескопа, а оптический выход динамического спектрального фильтра посредством второго сканирующего зеркала и второго выносного зеркала оптически связан с оптическим входом первого объектива, управляющие электроды первого и второго сканирующих зеркал подсоединены к блоку управления сканирующими зеркалами, вход которого подключен к блоку управления, управляющий вход динамического спектрального фильтра подключен к блоку управления, выносной уголковый отражатель, оптически связанный с оптическим входом телескопа и механически связанный с блоком перемещения уголкового отражателя, подключенного к блоку управления, четвертый управляемый ослабитель, оптически связывающий оптический выход лазерного передатчика с телескопом, управляющие входы управляемых ослабителей подключены к блоку управления, управляющие входы блоков сдвига частоты лазерного излучения и блоков сканирования лазерного излучения подключены к блоку управления.
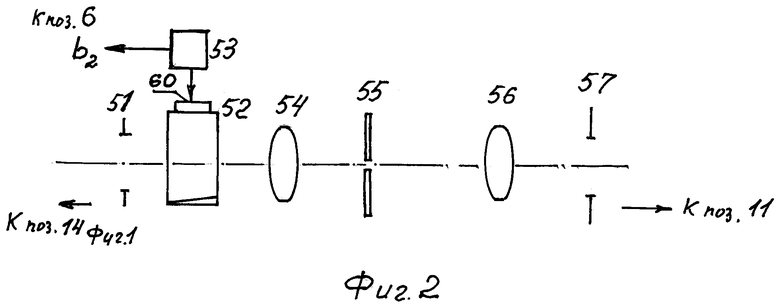
2. Блок сдвига частоты лазерного излучения содержит последовательно установленные на оптической оси оптически связанные входную диафрагму, акустооптическую ячейку с блоком управления, первую линзу, точечную диафрагму, вторую линзу и выходную диафрагму, при этом управляющий электрод акустооптической ячейки подключен к блоку управления акустооптической ячейкой.
3. Блок сканирования лазерного излучения выполнен на основе акустооптической ячейки, в которой возбуждены ультразвуковые волны, обеспечивающие изменение направления распространения лазерного излучения.
4. Динамический спектральный фильтр выполнен на основе акустооптической ячейки, в которой возбуждены ультразвуковые волны, взаимодействующие с проходящим через ячейку принимаемым лазерным излучением.
5. Лазерный передатчик и лазерный гетеродин выполнены на основе лазерных генераторов с возможностью перестройки длины волны генерируемого лазерного излучения.
На фиг. 1 представлена блок-схема лазерного локатора. На фиг. 2 представлена блок-схема блока сдвига частоты лазерного излучения. На фиг. 3 и 4 представлены экспериментально полученные спектры принимаемых информационных сигналов, формируемых в системе лазерного локатора, а на фиг. 5 представлен спектр фонового помехового излучения.
На фиг. 1 цифрами обозначены следующие элементы лазерного локатора.
1. Телескоп.
2. Блок наведения.
3. Первый объектив.
4. Первый фотоприемный блок.
5. Блок спектральных фильтров.
6. Блок управления.
7. Лазерный передатчик.
8. Лазерный гетеродин.
9. Блок измерения частоты.
Далее цифрами обозначены следующие вновь введенные элементы.
10. Первый блок сдвига частоты лазерного излучения.
11. Первый блок сканирования лазерного излучения.
12. Второй блок сдвига частоты лазерного излучения.
13. Второй блок сканирования лазерного излучения.
14. Первый управляемый ослабитель.
15. Второй управляемый ослабитель.
16. Третий управляемый ослабитель.
17. Третий блок сдвига частоты лазерного излучения.
18. Третий блок сканирования лазерного излучения.
19. Акустооптический модулятор.
29. Блок управления акустооптического модулятора.
20. Второй объектив.
21. Первое полупрозрачное зеркало.
22. Управляемый пространственный фильтр.
23. Третий объектив.
24. Второе полупрозрачное зеркало.
25. Второй фотоприемный блок.
26. Второй блок спектральных фильтров.
27. Третий фотоприемный блок.
28. Блок управления третьим фотоприемным блоком.
29. Блок управления акустооптического модулятора поз. 19 (указан выше).
30. Динамический спектральный фильтр.
31. Блок управления сканирующими зеркалами поз. 35 и 36.
32, 33. Первое и второе выносные зеркала.
34. Блок перемещения.
35. Первое сканирующее зеркало.
36. Второе сканирующее зеркало.
37. Выносной уголковый отражатель.
38. Блок перемещения уголкового отражателя.
39. Полупрозрачное зеркало.
40. Отражательное зеркало.
41, 42, 43, 44. Полупрозрачные зеркала.
59. Отражательное зеркало.
45, 46. Отражательные зеркала.
47, 48. Полупрозрачные зеркала.
49. Отражательное зеркало, расположенное в оптической тени контррефлектора
50 телескопа поз. 1.
58. Четвертый управляемый ослабитель.
59. Отражательное зеркало.
На фиг. 2 обозначены следующие элементы.
51. Входная диафрагма.
52. Акустооптическая ячейка.
53. Блок управления акустооптической ячейкой.
54. Первая линза.
55. Диафрагма точечная.
56. Вторая линза.
57. Выходная диафрагма.
60. Пьезоэлемент.
Принцип действия лазерного локатора заключается в следующем.
Лазерный передатчик 7 генерирует импульсы лазерного излучения, подсвечивающего наблюдаемый объект. Телескоп 1 с помощью блока наведения 2 направляется в некоторую заданную область наблюдаемого пространства, в которой возможно нахождение и передвижение обнаруживаемого и наблюдаемого объекта. Отраженное от объекта лазерное излучение улавливается телескопом 1 и с выхода телескопа с помощью первого объектива 3 фокусируется на фоточувствительной площадке (оптическом входе) первого фотоприемного блока 4. При этом из оптического тракта телескопа 1 с помощью блока перемещения 38 вынесен уголковый отражатель 37, используемый в режиме тестирования и настройки лазерного локатора. Одновременно из оптического тракта приемного канала лазерного локатора убраны выносные зеркала 32 и 33 с помощью блока перемещения 34. При этом динамический спектральный фильтр 30, используемый при сильных внешних фоновых помехах, выключен из оптического тракта. Управляемый ослабитель 58 переведен в режим стандартного полного пропускания излучения лазерного передатчика 7 (режим нулевого ослабления). Лазерное излучение с выхода телескопа 1 поступает непосредственно на оптический вход первого объектива 3, который далее фокусирует принятое лазерное излучение, отраженное от объекта, на фоточувствительную площадку первого фотоприемного блока 4. Одновременно на фоточувствительную площадку поступает лазерное излучение, генерируемое лазерным гетеродином 8, через полупрозрачные зеркала 42, 43 и две ветви изменения параметров лазерного гетеродинного излучения поз. 14, 10, 11 - первая ветвь и поз. 15, 12, 13 - вторая ветвь. Указанные две ветви формируют два гетеродинных лазерных излучения, с помощью которых в первом фотоприемном блоке 4 реализуется режим гетеродинного лазерного приема (фотосмешения) принимаемого лазерного излучения на двух различающихся частотах гетеродинного лазерного излучения. Соответственно на выходе фотоприемного блока 4 формируются два электрических сигнала на двух различных промежуточных частотах f1 и f2, поступающих далее на входы первого блока спектральных фильтров 5, в котором осуществляется раздельная фильтрация и усиление каждого из сформированных сигналов промежуточных частот. Сформированное лазерное гетеродинное излучение поступает на вход первого фотоприемного блока 4 через отражательное зеркало 46 и полупрозрачные зеркала 47, 48 с выходов 11 и 13. При этом первое лазерное гетеродинное излучение, сформированное элементами поз. 14, 10, 11 является основным, а второе лазерное гетеродинное излучение, сформированное элементами поз. 15, 12, 13 является дополнительным и служит для тестирования и функционального контроля работы лазерного локатора, а также для настройки и подстройки параметров функционирования лазерного локатора непосредственно в рабочем режиме обнаружения и сопровождения движущегося объекта. Первый 10 и второй 12 блоки сдвига частоты лазерного излучения (ЛИ) служат для компенсации доплеровского сдвига частоты принимаемого лазерного излучения, отраженного от наблюдаемого движущегося объекта. Первый 11 и второй 13 блоки сканирования ЛИ обеспечивают компенсацию рассогласования волновых фронтов принимаемого и гетеродинного лазерных излучений на оптическом входе первого фотоприемного блока 4. Следует отметить, что наличие двух гетеродинных излучений на входе первого фотоприемного блока 4 не приводит к снижению потенциала (чувствительности) приема лазерного излучения, отраженного от наблюдаемого объекта, так как величина амплитуды сигнала соответствующей промежуточной частоты (биений) на выходе фотоприемного блока 4 пропорциональна величине указанного принимаемого лазерного излучения и величине интенсивности лазерного гетеродинного излучения, задаваемого лазерным гетеродином 8. В результате одновременной регистрации фотоприемным блоком 4 принимаемого лазерного излучения, поступающего от телескопа 1, и лазерного излучения от лазерного гетеродина 8, поступающего через элементы основной ветви поз. 14, 10, 11, на выходе фотоприемного блока 4 формируется сигнал промежуточной частоты f1, который поступает в блок спектральных фильтров 5, где осуществляется фильтрация и усиление сигнала в соответствующей ячейке фильтра, настроенной на соответствующую величину промежуточной частоты электрического сигнала. Далее усиленный и оцифрованный сигнал с выхода блока 5 поступает в блок 6 для окончательной обработки и регистрации результата обнаружения отраженного лазерного излучения фотоприемным блоком 3 и фиксации величины промежуточной частоты f1 по номеру ячейки фильтрации сигнала промежуточной частоты в блоке спектральных фильтров 5. При этом зафиксированная величина f1 промежуточной частоты определяет величину радиальной скорости наблюдаемого объекта (по лучу визирования), так как она равна разности частот принимаемого отраженного от объекта лазерного излучения и гетеродинного лазерного излучения, поступающего на вход фотоприемного блока 4 с выхода блока поз. 11 через зеркала 46, 47, 48. Данное (основное) гетеродинное излучение имеет величину частоты, равную сумме частоты излучения лазерного гетеродина 8 и дополнительного сдвига частоты лазерного излучения, осуществляемого первым блоком сдвига частоты лазерного излучения 10, работающего по сигналам управления с выхода блока управления 6. Величина разности частот лазерного излучения лазерного передатчика 7 и лазерного гетеродина 8 измеряется непрерывно блоком измерения частоты 9 и с его выхода поступает в блок управления 6, в котором образуется вся информация о величинах частот лазерных излучений, сформированных подсвечивающим объект лазерным передатчиком 7, лазерным гетеродином 8, а также информация о величине сигнала сдвига частоты лазерного излучения с помощью блока 10 и величине промежуточной частоты f1 сигнала на выходе первого фотоприемного блока 4 (по номеру фильтра в блоке спектральных фильтров 6, осуществившего фильтрацию выходного сигнала от фотоприемного блока 4). По полученной указанной информации в блоке 6 непрерывно вычисляется величина сдвига частоты лазерного излучения, отраженного от наблюдаемого объекта по сравнению с частотой подсвечивающего лазерного излучения и вычисляется величина текущей радиальной скорости объекта по известной формуле Доплера. Таким образом, блок сдвига частоты лазерного излучения 10 осуществляет некоторый фиксированный сдвиг частоты лазерного излучения, сформированного лазерным гетеродином 8. Данная величина сдвига частоты задается блоком управления 6 и выбирается таким образом, чтобы промежуточная частота сигнала f1 на выходе первого фотоприемного блока 4 попадала в сетку фиксированных частот блока фильтрации 5. При очень высокой скорости движения наблюдаемого объекта, например, при слежении за космическими объектами, величина сдвига частоты лазерного излучения выбирается достаточно большой (порядка нескольких Гигагерц), что обеспечивает эффективное слежение за быстро движущимися объектами. Блок сканирования лазерного излучения 11 обеспечивает установление оптимального угла падения пучка лазерного гетеродинного излучения на фоточувствительную площадку первого фотоприемного блока 4. Блок сканирования 11, а также аналогичные блоки поз. 13 и 18 выполнены на основе акустооптических быстродействующих сканеров и обеспечивают прецизионное двухкоординатное изменение направления распространения лазерного гетеродинного излучения на выходе блоков сканирования независимо в двух перпендикулярных друг к другу плоскостях, каждая из которых является также перпендикулярной к плоскости фоточувствительной площадки первого фотоприемного блока 4. Дополнительно можно отметить, что блоки сканирования 11 и 13 осуществляют изменение направления распространения гетеродинного лазерного излучения, падающего на фоточувствительную площадку фотоприемного блока 4, относительно первой оптической оси, нормальной к плоскости фоточувствительной площадки фотоприемного блока 4. Нормальное стандартное направление распространения лазерного гетеродинного излучения на выходе блока сканирования 11 и, соответственно, на входе фотоприемного блока 4, является параллельным и совпадающим с первой оптической осью, при котором гетеродинное лазерное излучение с выхода блока сканирования 11 падает нормально (перпендикулярно) на фоточувствительную площадку фотоприемного блока 4 после отражения от полупрозрачного зеркала 48. В блоке сканирования 11 в этот момент фиксируются управляющие параметры, обеспечивающие указанное нормальное падение гетеродинного лазерного излучения на фоточувствительную площадку фотоприемного блока 4. Одновременно в блоке сдвига частоты 10 фиксируются параметры управления от блока управления 6, обеспечивающие определенную установленную величину промежуточной частоты сигнала на выходе первого фотоприемного блока 4, поступающего на вход блока спектральных фильтров 5. Этим обеспечивается стандартный режим работы лазерного локатора на основе гетеродинного метода приема лазерного излучения, отраженного от наблюдаемого объекта. Одновременно с этим вторая ветвь формирования второго гетеродинного излучения, содержащая элементы поз. 15, 12 и 13 формирует второй сигнал гетеродинного лазерного излучения также на основе лазерного излучения, генерируемого лазерным гетеродином 8 и поступающего на вход указанных элементов с выхода лазерного гетеродина 8 через полупрозрачное зеркало 43. Второй блок сдвига частоты лазерного излучения 12 обеспечивает такую величину сдвига, при которой величина промежуточной частоты сигнала на выходе фотоприемного блока 4 равна некоторой величине f2 и существенно отличается от первой промежуточной частоты f1, что позволяет обеспечить их раздельную фильтрацию в блоке фильтров 6 и последующую раздельную обработку в блоке управления 6. В блоке спектральных фильтров 5 предусмотрен набор электрических фильтров, для обеспечения фильтрации и последующего усиления сигналов промежуточной частоты в некотором спектральном диапазоне в районе второй промежуточной частоты f2. Данные спектральные электрические фильтры предназначены для приема и обработки указанных сигналов биений (фотосмешения) принимаемого лазерного излучения и второго гетеродинного лазерного излучения, сформированного второй ветвью элементов поз. 15, 12 и 13 и поступающего на фоточувствительную площадку первого фотоприемного блока 4 с выхода блока 13 через полупрозрачные зеркала 47 и 48. В момент приема лазерного излучения, отраженного от наблюдаемого объекта, с помощью второго блока сканирования лазерного излучения 13 по командам от блока управления 6 осуществляется периодическое изменение направления распространения указанного второго гетеродинного лазерного излучения относительно направления первой оптической оси, то есть относительно нормали к плоскости фоточувствительной площадки фотоприемного блока 4. Изменение направления распространения второго гетеродинного лазерного излучения осуществляется с помощью двухкоординатного сканера 13 в двух перпендикулярных направлениях относительно нормали к плоскости фоточувствительной площадки фотоприемного блока 4. В результате происходит периодическое изменение угла рассогласования между направлением (вектора) распространения принимаемого лазерного излучения и второго гетеродинного излучения при их падении на фоточувствительную площадку фотоприемного блока 4. В результате на выходе фотоприемного блока 4 образуется второй сигнал промежуточной частоты f2, амплитуда которого отражает непрерывное изменение угла рассогласования направления принимаемого лазерного излучения с направлением распространения второго лазерного гетеродинного излучения. При отсутствии такого рассогласования, то есть при нулевом угле указанного рассогласования и параллельности векторов распространения принимаемого и второго гетеродинного лазерных излучений уровень (амплитуда) сигнала второй промежуточной частоты на выходе фотоприемного блока 4 будет стремится к наибольшему значению. При этом величина уровня сигнала первой промежуточной частоты f1 на выходе первого фотоприемного блока 4 остается неизменной вследствие того, что направление вектора распространения первого гетеродинного лазерного излучения на выходе первого блока сканирования 11 также неизменно и фиксировано вследствие фиксированного управляющего сигнала, поступающего на блок сканирования 11 с выхода блока управления 6. Соответственно является неизменным и угол рассогласования между векторами распространения принимаемого лазерного излучения и первого гетеродинного лазерного излучения, сформированного элементами первой ветви поз. 14, 10, 13. Таким образом, в блоке управления 6 непрерывно формируется информация о величинах сигналов двух промежуточных частот f1 и f2, полученных на выходе первого фотоприемного блока 4 в результате взаимодействия (биений) принимаемого лазерного излучения и первого и второго гетеродинных лазерных излучений. Указанные два сигнала промежуточных частот f1 и f2 получены от одного и того же принимаемого лазерного излучения и различаются только характером изменения угла рассогласования между векторами принимаемого лазерного излучения и первого и второго гетеродинных лазерных излучений. В остальном параметры сигналов первой и второй промежуточных частот являются одинаковыми. Сигнал первой промежуточной частоты получен при неизменном направлении вектора распространения первого гетеродинного лазерного излучения и, соответственно, при неизменном указанном угле рассогласования. Величина этого первого сигнала промежуточной частоты принята за основу сравнения. Сигнал второй промежуточной частоты получен при условиях непрерывного изменения направления вектора распространения второго гетеродинного лазерного излучения, и, соответственно, при непрерывном изменении указанного угла рассогласования векторов принимаемого и второго гетеродинного лазерных излучений. В блоке управления 6 осуществляется непрерывное сравнение изменения амплитуды (уровня) сигнала второй промежуточной частоты относительно уровня сигнала первой промежуточной частоты в тот же момент времени при одном и том же принимаемом лазерном излучении и одинаковом уровне генерируемого излучения лазерного гетеродина. Различием условий получения сигналов первой и второй промежуточных частот является только различие в уровнях указанных углов рассогласования векторов принимаемого и гетеродинных лазерных излучений. Поэтому при превышении уровня сигнала второй промежуточной частоты над уровнем сигнала первой промежуточной частоты в некоторый момент времени и при некотором значении направления вектора распространения второго гетеродинного лазерного излучения в этот момент времени в блоке управления 6 выносится решение о достижении более точного согласования волновых фронтов принимаемого и второго гетеродинного лазерных излучений, в результате чего произошло относительное увеличение уровня сигнала второй промежуточной частоты на выходе первого фотоприемного блока 4. Далее блок управления 6 вырабатывает управляющий сигнал, поступающий в первый блок сканирования лазерного излучения 11, в результате которого блок сканирования 11 устанавливает направление вектора распространения лазерного излучения на выходе данного блока, аналогичное направлению вектора распространения второго гетеродинного лазерного излучения на выходе второго блока сканирования 13 в момент времени наибольшей величины уровня второго сигнала промежуточной частоты, относительно уровня сигнала первой промежуточной частоты. Данное новое найденное направление вектора первого гетеродинного лазерного излучения фиксируется в первом блоке сканирования лазерного излучения 11. Второй блок сканирования 13 лазерного излучения далее продолжает непрерывное изменение во времени направления вектора распространения лазерного излучения на выходе блока 13 относительно вновь найденного направления вектора распространения лазерного излучения в горизонтальном и вертикальном направлениях (плоскостях). Можно утверждать, что на основе двух ветвей формирования первого и второго гетеродинных лазерных излучений, первого фотоприемного блока 4 и блока управления 6 реализована система автоматического слежения и управления углом рассогласования векторов распространения принимаемого и гетеродинного лазерных излучений, устанавливающая оптимальный (минимальный) угол рассогласования в гетеродинном методе приема лазерных локационных сигналов. Указанное слежение за уровнем рассогласования принимаемого лазерного излучения и двух гетеродинных лазерных излучений осуществляется далее непрерывно и постоянно при приеме и слежении за движущимся наблюдаемым объектом. Первый и второй 14 и 15 управляемые ослабители служат для уравнивания величин (интенсивности) первого и второго гетеродинных лазерных излучений на фоточувствительной площадке первого фотоприемного блока 4.
Одновременно с осуществлением управления углом рассогласования принимаемого и гетеродинного лазерных излучений в лазерном локаторе осуществляется автоматическая подстройка и слежение за величиной промежуточной частоты биений, образующейся при взаимодействии принимаемого и гетеродинного лазерных излучений в первом фотоприемном блоке 4. Для выполнения указанной функции служит акустооптический модулятор 19, который совместно со вторым объективом 20 осуществляет в реальном масштабе времени спектральный анализ поступающих с выхода первого фотоприемного блока 4 электрических сигналов промежуточных частот в когерентном свете излучения, поступающего с выхода лазерного гетеродина 8 через полупрозрачное зеркало 44 и отражательное зеркало 59 на оптический вход акустооптического модулятора 19. Электрический сигнал с выхода первого фотоприемного блока 4 (с одного из центральных фоточувствительных элементов) поступает на управляющий электрод акустооптического модулятора 19 через блок управления этого модулятора 29. В акустооптическом модуляторе 19 возбуждается акустическая ультразвуковая волна под воздействием усиленного в блоке 29 электрического сигнала, поступившего с выхода фотоприемного блока 4 и содержащего сформированные сигналы первой и второй промежуточных частот. На оптический вход акустооптического модулятора 19 поступает монохроматический пучок лазерного излучения с выхода лазерного гетеродина 8 через полупрозрачное зеркало 44 и отражательное зеркало 59. В акустооптическом модуляторе 19 указанный лазерный пучок взаимодействует с возбужденной ультразвуковой волной, в результате чего на выходе акустооптического модулятора 19 и одновременно на входе второго объектива 20 образуется пучок лазерного излучения, промодулированный электрическим сигналом с выхода первого фотоприемного блока 4. Объектив 20 осуществляет оптическое Фурье-преобразование в когерентном свете лазерного излучения лазерного гетеродина 8 и формирует пространственный спектр модулированного лазерного пучка в фокальной плоскости объектива 20, совмещенной с плоскостью управляемого пространственного фильтра 22 и одновременно совмещенной с фоточувствительной площадкой третьего фотоприемного блока 27. Сформированный пространственный спектр считывается третьим фотоприемным блоком 27 и через его блок управления 28 поступает в блок управления 6. Одновременно осуществляется пространственная фильтрация сформированного пространственного спектра с помощью управляемого пространственного фильтра 22. Сформированный в реальном масштабе времени пространственный спектр модулированного лазерного пучка представляет собой два спектральных порядка, соответствующих двум сигналам промежуточных частот f1 и f2, сформированным на выходе первого фотоприемного блока 4 в результате взаимодействия принимаемого лазерного излучения и двух гетеродинных лазерных излучений. Управляемый пространственный фильтр 22 по управляющим сигналам с выхода блока управления 6 пропускает на оптический вход третьего объектива 23 только распределение излучения какого либо одного спектрального порядка, соответствующего, например, сигналу первой промежуточной частоты f1. Возможна также фильтрация и исключение некоторых шумовых и помеховых составляющих, сопутствующих или содержащихся вблизи и вместе с сигналом первой промежуточной частоты. (Аналогично и для второй промежуточной частоты). Далее осуществляется операция обратного преобразования (превращения) отфильтрованного распределения излучения первой промежуточной частоты в электрический сигнал для ввода в блок управления 6, осуществляемое с помощью второго фотоприемного блока 25. Третий объектив 23 осуществляет обратное Фурье-преобразование в когерентном свете и формирует в фокальной плоскости объектива 23, распределение лазерного пучка, в котором отфильтрована с помощью управляемого пространственного фильтра 22 (исключена) вторая составляющая сигнала со второй промежуточной частотой, а также исключены некоторые помеховые и мешающие составляющие в сигнале первой промежуточной частоты. Управляемый пространственный фильтр 22 выполняет функцию динамической пропускающей диафрагмы (окна), которая пропускает распределение светового пучка, соответствующее сигналу первой промежуточной частоты f1. Одновременно на фоточувствительную площадку второго фотоприемного блока 25 поступает третий гетеродинный лазерный пучок с выхода лазерного гетеродина 8, дополнительно сформированный с помощью третьей ветви элементов формирования гетеродинного лазерного излучения поз. 16, 17, 18. Данный лазерный пучок поступает на оптический вход (фоточувствительную площадку) фотоприемного блока 25 через отражательное зеркало 45 и полупрозрачное зеркало 24. В результате взаимодействия (биений) сформированных на фоточувствительной площадке фотоприемного блока 25 лазерных пучков на выходе данного фотоприемного блока 25 образуется отфильтрованный в реальном масштабе времени электрический сигнал, содержащий информацию, соответствующую информации, содержащейся ранее в сигнале первой промежуточной частоты f1 на выходе первого фотоприемного блока 4. При этом частота (центральная) этого сигнала определяется как величиной первой промежуточной частоты f1, так и величиной установленного сдвига частоты лазерного излучения f3 в третьем блоке сдвига частоты ЛИ 17, который устанавливается по управляющему сигналу с выхода блока управления 6. Данная частота сигнала биений на выходе фотоприемного блока 25 равна сумме частот f1+f3, где f3 - величина указанного устанавливаемого сдвига частоты лазерного излучения в блоке 17. В блоке управления 6 непрерывно образуется информация о текущей величине частоты сигнала первой промежуточной частоты, поступающего с выхода третьего фотоприемного блока 27 через его блок управления 28. Величина этой частоты равна расстоянию от центра фокальной плоскости (фокуса объектива 20) положения первого дифракционного порядка - отметки от сигнала промежуточной частоты в сформированном в плоскости фоточувствительной площадки фотоприемного блока 27 пространственного спектра принимаемого лазерного пучка, сформированного с помощью второго объектива 20. Положение в фокальной плоскости данного дифракционного порядка все время изменяется, что отражает изменение (флуктуации) скорости движения наблюдаемого объекта. Блок управления 6 непрерывно формирует по полученной указанной информации управляющий сигнал, поступающий в третий блок сдвига частоты ЛИ 17, обеспечивающий компенсацию текущих изменений частоты сигнала, отфильтрованного в управляемом пространственном фильтре 22 и преобразованном в электрический сигнал на выходе второго фотоприемного блока 25. В результате указанная частота сигнала на выходе второго фотоприемного блока 25 остается неизменной и равной величине рабочей частоте фильтрации f4 в одном из узкополосных спектральных электрических фильтров во втором блоке спектральных фильтров 26.
f1+f3=f4=const.
Таким образом, реализуется система автоматического управления и слежения за изменениями частоты принимаемого сигнала, обусловленными доплеровскими смещениями частоты принимаемого лазерного излучения. Такая система позволяет осуществить стабилизацию в необходимых пределах частоты принятого информационного сигнала и обеспечить дальнейшую фильтрацию и обработку этого сигнала с помощью узкополосного фильтра во втором блоке спектральных фильтров 26, в который поступает текущий принимаемый сигнал со стабилизированной центральной частотой с выхода считывающего этот сигнал второго фотоприемного блока 25. Отфильтрованный в узкополосном электрическом фильтре 26 сигнал поступает далее на вход блока управления 6 для дальнейшего анализа. Использование указанной системы слежения и стабилизации промежуточной частоты принятого информационного сигнала позволяет осуществить фильтрацию сигналов во втором блоке спектральных фильтров 26 с помощью специальных узкополосных электрических фильтров, применение которых было бы невозможно без данной системы отслеживания текущих изменений промежуточной частоты принимаемого информационного сигнала. Это позволяет повысить вероятность правильного обнаружения (обнаружительную способность) при окончательной обработке и анализе полученной информации в блоке управления 6. Во время осуществления слежения за частотой принимаемого информационного сигнала с помощью изменения (управления) величиной сдвига частоты лазерного излучения в блоке сдвига частоты ЛИ 17 в третьем блоке сканирования ЛИ 18 осуществляется изменение направления вектора распространения лазерного излучения для согласования волновых фронтов лазерных излучений, падающих на фоточувствительную площадку второго фотоприемного блока 25, а именно: промодулированного лазерного излучения с выхода акустооптического модулятора 19 и третьего гетеродинного лазерного излучения с выхода блока 18. Информация о необходимой величине оптимального угла падения указанного третьего гетеродинного лазерного излучения получается в блоке управления 6 на основе величины смещения дифракционного порядка от сигнала первой промежуточной частоты относительно центра плоскости управляемого пространственного фильтра 22 и, соответственно, центра фоточувствительной площадки третьего фотоприемного блока 27. Данная информация считывается третьим фотоприемным блоком 27 и далее непрерывно поступает с выхода его блока управления 28 в блок управления 6, в котором вырабатываются необходимые управляющие сигналы, поступающие в третий блок сканирования лазерного излучения 18. В предлагаемом лазерном локаторе возможно также осуществление другого метода слежения и компенсации изменений величины промежуточной частоты принимаемого информационного сигнала, при котором сформированный в блоке управления 6 сигнал обратной связи для управления и компенсации вариаций частоты подается на управляющий вход первого блока сдвига частоты лазерного излучения 10, в результате чего осуществляется стабилизация первой промежуточной частоты принимаемого сигнала на выходе первого фотоприемного блока 4. При этом величина сигнала управления сдвигом частоты определяется в блоке управления 6 на основе измерения изменений текущей величины второй промежуточной частоты по информации, поступающей в блок управления 6 от третьего фотоприемного блока 27. Возможно также одновременное отслеживание изменений величины промежуточной частоты принимаемого информационного сигнала путем подачи управляющего сигнала с выхода блока управления 6 на управляющий вход первого блока сдвига частоты ЛИ 10 и на управляющий вход третьего блока сдвига частоты ЛИ 17. В этом случае реализуется двухконтурная система динамической компенсации изменений промежуточной частоты, позволяющая обеспечить особо высокую точность слежения и компенсации флуктуаций частоты принимаемого информационного сигнала на входе второго блока спектральных фильтров 26, что позволяет использовать в данном блоке специальные узкополосные фильтры и повысить обнаружительную способность и эффективность работы лазерного локатора в условиях внешних фоновых засветок и помех. Следует отметить, что формируемый в блоке управления 6 сигнал управления сдвигом частоты лазерного излучения, поступающий на управляющий вход третьего блока сдвига частоты ЛИ 17, содержит важную информацию о динамике изменения скорости движения наблюдаемого космического объекта и может быть использован для анализа состояния и характера движения данного объекта на космической орбите. Акустооптический модулятор 19 и объектив 20 при формировании на фоточувствительной площадке третьего фотоприемного блока 27 пространственного спектра информационного сигнала с выхода первого фотоприемного блока 4 осуществляют одновременно важную функцию тестирования и контроля режима работы приемного канала лазерного локатора, к которому относятся собственно первый фотоприемный блок 4 и элементы формирования первого и второго гетеродинных лазерных излучений поз. 8, 10-13. Это обусловлено тем, что на выходе фотоприемного блока 4 помимо информационных сигналов первой и второй промежуточных частот, образуется также сигнал биений (фотосмешения) первого и второго гетеродинных лазерных излучений, частота которого равна разности частот указанных первого и второго гетеродинных ЛИ. Спектральная отметка от данного сигнала биений двух лазерных гетеродинных излучений в виде дополнительного дифракционного порядка, сформированного объективом 20, считывается третьим фотоприемным блоком 27 и через блок 28 поступает в блок управления 6 для последующего непрерывного контроля указанной частоты биений, равной расстоянию этого дифракционного порядка от центра дифракционной картины спектра, совпадающей с центром фоточувствительной площадки фотоприемного блока 27. Уровень данного дифракционного порядка пропорционален интенсивностям первого и второго гетеродинных лазерных излучений. При изменении угла между векторами распространения первого и второго гетеродинных излучений данный уровень изменяется. При этом величины частот первого и второго гетеродинных лазерных излучений на выходах блоков сдвига частоты ЛИ 10 и 12 подбираются такими, чтобы их разность была меньше получаемых на выходе первого фотоприемного блока 4 первой и второй промежуточных частот во избежание наложения сигналов указанных биений от лазерных гетеродинных излучений и сигналов указанных первой и второй промежуточных частот. Практически такое условие легко выполняется соответствующим выбором величин сдвига лазерных гетеродинных излучений в блоках сдвига частоты ЛИ 10 и 12. Таким образом, в блоке управления 6 в рабочем режиме лазерного локатора осуществляется непрерывный функциональный контроль и тестирование приемного канала лазерного локатора на основе анализа сигналов фотосмешения, не связанных с принимаемым лазерным излучением от наблюдаемого объекта и не требующих наличия отраженных сигналов от объекта для определения состояния нормального функционирования лазерного локатора. Это является важным фактором повышения эффективности и надежности работы лазерного локатора. В предлагаемом лазерном локаторе предусмотрена дополнительная возможность увеличения помехозащищенности и повышения эффективности работы в условиях высокого уровня внешних фоновых помех и засветок, возникающих при работе в дневное время вблизи мощного источника оптического излучения, например, при слежении за объектом, изображение которого находится вблизи солнечного диска. Вначале при работе в дневное время с помощью акустооптического модулятора 19, объектива 20 и третьего фотоприемного блока 27 осуществляется формирование пространственного спектра общего фона на входе телескопа 1, направленного в заданную область пространства с помощью блока наведения 2. Спектр фона формируется в плоскости фоточувствительной площадки фотоприемного блока 27, совмещенной с фокальной плоскостью объектива 20 посредством первого полупрозрачного зеркала 21. При этом прием сигналов с выхода первого фотоприемного блока 4 осуществляется в диапазоне ранее выбранных первой и второй промежуточных частот при соответствующих величинах частот первого и второго гетеродинных лазерных излучений, сформированных первым 10 и вторым 12 блоками сдвига ЛИ. Следует отметить, что частотами этих гетеродинных Лазерных излучений и выбранными промежуточными частотами при пространственной фильтрации в блоке управляемого пространственного фильтра 22, а также общим суммарным рабочим диапазоном модулирующих входных частот в акустооптическом модуляторе 19 определяется спектральный диапазон входного лазерного излучения, регистрируемого в режиме гетеродинного приема фотоприемным блоком 4 и соответствующего длине волны (диапазону) подсвечивающего лазерного излучения, генерируемого лазерным передатчиком 7. Информация о суммарном спектре фонового излучения в указанном диапазоне выбранных рабочих частот лазерного передатчика поступает с выхода третьего фотоприемного блока 27 через блок 28 в блок управления 6, где осуществляется анализ уровня фоновых шумов и принимается решение об использовании дополнительного динамического спектрального фильтра поз.30, осуществляющего узкополосную фильтрацию принимаемого телескопом 1 лазерного излучения до поступления этого излучения на оптический вход (фоточувствительную площадку) первого фотоприемного блока 4. Для этого по командам от блока управления 6 блок перемещения 34 осуществляет введение первого и второго выносных зеркал 32 и 33 в оптический тракт так, как это показано на фиг. 1. При этом лазерное излучение с оптического выхода телескопа 1 теперь попадает на вход первого объектива 1 не напрямую, а после прохождения через динамический спектральный фильтр 30. В результате отражения от зеркал 32 и 35 лазерное принимаемое излучение проходит на вход динамического спектрального фильтра 30. После узкополосной спектральной фильтрации ЛИ с выхода спектрального фильтра 30 излучение попадает на вход объектива 3 после отражения от зеркал 36 и 33. Длина волны (частота) узкополосной фильтрации принимаемого лазерного излучения в динамическом спектральном фильтре 30 управляется по сигналу с выхода блока управления 6 и соответствует длине волны лазерного излучения, генерируемого лазерным передатчиком 7, с учетом возможных изменений на величину доплеровского смещения частоты отраженного от движущегося объекта лазерного излучения. В результате узкополосной фильтрации принимаемого лазерного излучения в динамическом спектральном фильтре 30 происходит отсечка фонового помехового излучения и снижение уровня интермодуляционных шумовых помех на выходе первого фотоприемного блока 4 при его работе в режиме гетеродинного приема лазерного излучения, отраженного от объекта, подсвеченного лазерным излучением лазерного передатчика 7, что обеспечивает увеличение вероятности правильного обнаружения и повышение эффективности работы лазерного локатора в условия высокого уровня внешних фоновых помех. Одновременно динамический спектральный фильтр 30 осуществляет блокирование полосы приема зеркального частотного канала, который в оптическом гетеродинном приемнике образуется также как и в супергетеродинном приемнике радиодиапазона. Исключение приема фоновых шумов зеркальной частоты приема дополнительно повышает помехозащищенность и эффективность работы предлагаемого лазерного локатора. Первое и второе сканирующие зеркала 35 и 36 обеспечивают точное провешивание оптической оси при введении динамического спектрального фильтра 30 в приемный оптический тракт лазерного локатора. Для этого под воздействием управляющих сигналов, поступающих на указанные зеркала от блока управления 31 сканирующими зеркалами, последние изменяют в небольших пределах направления отраженных от зеркал излучений для точного установления направления выходного излучения от телескопа на вход фильтра 30 и выходного излучения от фильтра 30 на вход объектива 3. При этом точная юстировка приемного оптического канала и оптических элементов, обеспечивающих прием лазерного излучения, отраженного от объекта, осуществляют в специальном режиме настройки лазерного локатора, при котором осуществляется ввод в оптический приемо-передающий тракт выносного уголкового отражателя 37 с помощью блока перемещения уголкового отражателя 38, как это показано на фиг. 1. В этом случае лазерный передатчик 7 переводится в режим генерации излучения минимального уровня. Одновременно управляемый ослабитель 58 осуществляет дополнительное ослабление лазерного излучения от передатчика 7 до уровня, позволяющего зарегистрировать излучение без перегрузки первого фотоприемного блока 4. Уголковый отражатель 37 осуществляет возвращение на вход телескопа 1 части генерируемого лазерного излучения точно по направлению оси диаграммы направленности этого излучения, направленного телескопом 1 с помощью блока наведения в сторону наблюдаемого объекта. Далее сформированное уголковым отражателем 37 контрольное лазерное излучение регистрируется фотоприемным блоком 4, имеющим четырехэлементную фоточувствительную площадку. С помощью первого и второго сканирующих зеркал 35, 36 осуществляется наведение оси сформированного контрольного лазерного излучения в центр фоточувствительной площадки первого фотоприемного блока 4. Одновременно в блоках сканирования лазерного излучения 11 и 13 по командам от блока управления 6 устанавливается нормальный угол падения формируемых гетеродинных лазерных излучений на фоточувствительную площадку фотоприемного блока 4. На этом заканчивается этап настройки введенного в приемный тракт лазерного локатора динамического спектрального фильтра 30. Аналогичным образом с помощью введения на входе телескопа 1 выносного уголкового отражателя 37 осуществляется тестирование и настройка стандартного режима работы лазерного локатора без введения в оптический тракт динамического спектрального фильтра 30.
При обнаружении в указанном выше режиме анализа фоновой обстановки значительного уровня фоновых помех в диапазоне лазерного излучения, генерируемого лазерным передатчиком 7, в предлагаемом лазерном локаторе возможен переход на другую длину волны или другой диапазон длин волн, для чего возможно использовать лазерный передатчик и лазерный гетеродин с перестройкой генерируемых длин волн лазерных излучений. При этом одновременно с перестройкой длин волн лазерных излучений, генерируемых в лазерном передатчике и лазерном гетеродине, осуществляется соответствующая динамическая перестройка длины волны полосы фильтрации и приема в динамическом спектральном фильтре 30, а также выбор и установление необходимых сдвигов частоты в блоках сдвига частоты ЛИ 10 и 12 и установление необходимых углов падения гетеродинных лазерных излучений на фоточувствительную площадку первого фотоприемного блока 4. Этим реализуется оптимальный наиболее эффективный режим работы лазерного локатора в выбранном диапазоне приема лазерных локационных сигналов и излучений с минимальным уровнем внешних фоновых засветок и помех.
В предлагаемом лазерном локаторе одну из важных функций выполняют блоки сдвига частоты лазерного излучения поз. 10, 12 и 17. На фиг. 2 представлена блок-схема такого блока сдвига частоты лазерного излучения, выполненного на основе акустооптической ячейки 52, осуществляющей модуляцию проходящего через ячейку лазерного излучения. На оптический вход акустооптической ячейки 52 (фиг. 2) через входную диафрагму 51 поступает лазерное излучение, генерируемое лазерным гетеродином 8 и поступающее (см. фиг. 1) через полупрозрачное зеркало 42 и первый управляемый ослабитель 14 на вход блока сдвига частоты ЛИ поз. 10. При прохождении через акустооптическую ячейку 52 лазерное излучение взаимодействует с ультразвуковой волной определенной частоты, возбужденной в этой ячейке посредством специального пьезоэлемента 60, находящегося в контакте с кристаллом акустооптической ячейки 52. В результате указанного взаимодействия на выходе акустооптической ячейки 52 образуется пучок лазерного излучения, частота которого сдвинута на величину частоты ультразвуковой волны в акустооптической ячейке, частота которой определена и задана в блоке управления 53 данной акустооптической ячейкой. С помощью первой линзы 54 сформированный лазерный пучок со сдвинутой частотой на заданную величину, определяемую в блоке 53 по командам от блока управления 6, направляется в плоскость точечной диафрагмы 55, расположенной строго на оптической оси данного блока сдвига частоты ЛИ. Данная точечная диафрагма имеет диаметр пропускающего отверстия равный 0,2-0,4 миллиметра. Термин «точечная» является условным и отражает малую величину диаметра отверстия диафрагмы. Вторая линза 56 осуществляет расширение пучка лазерного излучения, отфильтрованного осевой точечной диафрагмой 55, до выходной диафрагмы 57. Диафрагма 55 находится в передней фокальной плоскости линзы 56. В результате на выходе данного блока сдвига частоты ЛИ после выходной диафрагмы 57 образуется пучок лазерного излучения, распространяющийся строго вдоль оптической оси блока и имеющий частоту лазерного излучения, сдвинутую точно на величину частоты ультразвуковой волны, которая задана в блоке управления 53 акустооптической ячейкой по управляющему сигналу, поступающему от блока управления 6. Таким образом в блоках сдвига частоты ЛИ, осуществляется управляемый сдвиг частоты проходящего лазерного излучения на заданную в блоке управления 6 величину сдвига без изменения направления распространения этого излучения. Акустооптическая ячейка 52 работает в режиме дифракции Брэгга, при котором на выходе ячейки образуется только один дифрагированный лазерный пучок, в который перекачивается вся энергия поступающего на ячейку лазерного излучения. При осуществлении взаимодействия лазерного излучения с акустооптической ультразвуковой волной в ячейке 52 изменяется направление распространения выходящего из ячейки лазерного пучка. Поэтому диафрагма 55 смещена от точки фокуса первой линзы 54, в результате чего в диафрагму всегда попадает часть сформированного излучения со сдвинутой частотой лазерного излучения. Для исключения влияния изменения направления распространения лазерного излучения, при сдвиге его частоты возможно также использование диффузного отражателя, формирующего широкую диаграмму направленности падающего лазерного излучения со смещенной частотой излучения, из которого затем с помощью точечной диафрагмы выделяется излучение, распространяющееся строго вдоль оптической оси блока сдвига частоты ЛИ. Подробно работа акустооптической ячейки, в которой реализуется сдвиг частоты лазерного излучения, изложена в монографии [5]. Сдвиг частоты лазерного излучения может быть осуществлен как в положительную, так и в отрицательную сторону. Следует отметить, что использованный в блоках сдвига частоты ЛИ метод сдвига частоты на основе акустооптического взаимодействия лазерного излучения в акустооптической ячейке обладает высокой точностью, так как величина сдвига определяется непосредственно величиной частоты управляющего сигнала в блоке управления 53 акустооптической ячейкой, в котором указанная частота задается с высокой точностью с помощью специального синтезатора частоты, входящего в состав данного блока управления 53. Также следует отметить высокое быстродействие данного метода, позволяющее осуществлять сдвиг частоты ЛИ с частотой повторения импульсов лазерного передатчика и осуществлять отслеживание изменения промежуточной частоты на выходе первого фотоприемного блока 4 при наблюдении за быстро движущимися космическими объектами. Следует отметить возможность использования для сдвига частоты ЛИ различных физических эффектов, например, можно использовать нелинейное взаимодействие оптических излучений в нелинейных оптических кристаллах. Важную функцию в предлагаемом лазерном локаторе выполняют блоки сканирования лазерного излучения поз. 11, 13 и 18. Данные блоки выполнены на основе акустооптических отклоняющих лазерное излучение ячеек - прецизионных сканаторов лазерного излучения [6]. Высокая точность отклонения достигается в акустооптических сканаторах вследствие того, что управляющим сигналом, определяющим угол отклонения лазерного излучения, здесь является возбуждающий акустическую волну в ячейке электрический сигнал, частота которого с высокой точностью задается с помощью синтезатора частоты, входящего в состав данного блока сканирования лазерного излучения. Одновременно блоки сканирования на основе акустооптических ячеек обладают высоким быстродействием, определяемым высокой скоростью распространения акустической волны через акустооптическую ячейку. Следует отметить, что при изменении направления угла распространения лазерного излучения через блок сканирования ЛИ 11, 13 и18 происходит некоторый сдвиг частоты лазерного излучения, определяемый частотой поданного на акустооптическую ячейку данного блока сканирования управляющего сигнала. Для компенсации этого смещения частоты отклоняемого лазерного излучения в предшествующем блоке сдвига частоты (например, блок 10 перед блоком сканирования 11) осуществляется дополнительный упреждающий сдвиг частоты, или основной сдвиг частоты ЛИ в блоке сдвига частоты 10 осуществляется с имеющимся или устанавливаемым дополнительным сдвигом частоты в последующем блоке сканирования лазерного излучения 11. Таким образом, последовательно установленные блок сдвига частоты лазерного излучения 10 и блок сканирования 11 лазерного излучения, выполненные на основе акустооптических ячеек, работают как единый блок (элемент) сдвига частоты и сканирования лазерного излучения под управлением сигналов, поступающих от блока управления 6 и обеспечивающих высокую точность изменения частоты и направления распространения лазерного излучения в заданных пределах. В настоящее время разработаны акустооитические ячейки, работающие от ближнего ультрафиолетового до среднего инфракрасного диапазонов длин волн, обеспечивающие сдвиг длины волны лазерного излучения на величину порядка 2 (двух) Гигагерц, а при использовании нескольких каскадов взаимодействия ЛИ с акустической волной обеспечивают сдвиг частоты ЛИ до 10 Гигагерц, что достаточно для компенсации доплеровского сдвига при слежении и осуществлении лазерной связи с космическими объектами. В качестве блоков сканирования лазерного излучения возможно также использование сканирующих зеркал с управляющими пьезоэлементами, аналогично используемым сканирующим зеркалам поз. 35 и 36.
В лазерном локаторе динамический спектральный фильтр 30 реализован на основе акустооптической ячейки и пьезоэлемента, возбуждающего в акустооптической ячейке ультразвуковые волны, определенной частоты и интенсивности. В результате на оптический выход блока 30 проходит только лазерное излучение в заданном узком спектральном диапазоне, определяемом частотой управляющего сигнала, сформированного с высокой точностью с помощью синтезатора частоты, входящего в состав блока 30. При этом происходит некоторый дополнительный контролируемый сдвиг частоты принимаемого лазерного излучения, проходящего через динамический спектральный фильтр 30. Этот дополнительный известный сдвиг частоты принимаемого ЛИ учитывается и компенсируется с помощью блоков сдвига частоты лазерного излучения 10 и 12 при установлении этими блоками заданной величины сдвига частот формируемых гетеродинных лазерных излучений по командам от блока управления 6. Таким образом, блоки сдвига частоты лазерного излучения 10 и 11 выполняют дополнительную функцию компенсации сдвига частоты принимаемого лазерного излучения при его прохождении через динамический спектральный фильтр 30. Дополнительно динамический спектральный фильтр 30 содержит специальный управляющий блок, в который входит синтезатор частоты, обеспечивающий формирование набора управляющих электрических сигналов с точным значением частоты для возбуждения ультразвуковых волн с заданными параметрами, обеспечивающих динамическую фильтрацию принимаемого лазерного излучения. Принцип работы и характеристики акустооптических ячеек, использованных в динамических спектральных фильтрах, акустооптических сканаторах и блоках сдвига частоты изложены в монографии [6] и в многочисленных публикациях [7].
В качестве блоков спектральных фильтров 5 и 26 использованы современные электрические узкополосные фильтры, работающие в диапазонах от 0,1 до сотен мегагерц. При этом в блоках фильтрации 5 и 26 имеются полные наборы спектральных электрических фильтров, подключенных индивидуально и раздельно к каждому выходному электроду четырехплощадочного фоточувствительного элемента фотоприемных блоков поз.4 и 25. В блоке 26 использованы наиболее узкополосные фильтры, так как на его вход поступает сигнал с выхода системы компенсации изменений частоты информационного сигнала, обеспечивающей попадание этого сигнала в узкую полосу соответствующего фильтра в блоке 26 в условия слежения за быстро движущимся объектом. Блок 26 содержит некоторый набор узкополосных спектральных фильтров, настроенных на некоторый ряд фиксированных частот электрической фильтрации, что позволяет осуществлять узкополосную фильтрацию принимаемых сигналов в некотором диапазоне изменения промежуточных частот, определяемом частотой сигнала, поступающего с выхода первого фотоприемного блока 4 на акустооптический модулятор 19, и частотой лазерного излучения, сформированного на выходе блока сдвига частоты лазерного излучения 17. Блоки 5 и 26 содержат также электронные усилители и ряд средств оцифровки усиленных и отфильтрованных сигналов для ввода информации в блок управления 6. Блоки 5 и 26 могут также содержать демодуляторы принимаемых электрических высокочастотных сигналов (ВЧ детекторы) при выполнении различных алгоритмов обработки принимаемых лазерных локационных сигналов и сигналов лазерной космической связи. Блок спектральных фильтров 5 содержит набор электрических фильтров с фиксированной полосой пропускания, настроенных на последовательный ряд частот (промежуточных), в районе первой промежуточной частоты и второй промежуточной частоты. Блок спектральных фильтров 5 содержит также набор соответствующих электрических усилителей и аналого-цифровых преобразователей, осуществляющих оцифровку усиленных и отфильтрованных электрических сигналов для ввода в блок управления 6, представляющий собой специализированную многофункциональную ЭВМ.
В качестве блока управления 6, осуществляющего управление всеми блоками и элементами лазерного локатора, а также осуществляющего обработку информации, поступающей от фотоприемных блоков и блока измерения частоты 9, использована многофункциональная высокопроизводительная электронно-вычислительная машина, снабженная соответствующими интерфейсами, обеспечивающими параллельную связь с блоками и элементами лазерного локатора. В состав блока управления 6 входит также дисплей для отображения информации и пульт управления оператора.
Блок наведения 2 осуществляет наведение оси телескопа 1 в заданную точку наблюдаемого пространства и последующее слежение за обнаруженным движущимся объектом. Блок 2 выполнен на основе управляемых шаговых электродвигателей. Шаговые электрические двигатели использованы также в блоке перемещения 34 и в блоке перемещения 38 выносного уголкового отражателя 37.
Блок измерения частоты 9 является стандартным, аналогичным используемому в прототипе, и содержит фотоприемник, на вход которого поступают лазерные излучения лазерного передатчика 7 и лазерного гетеродина 8. С выхода указанного фотоприемника сигнал биений на промежуточной частоте усиливается, оцифровывается и поступает в цифровом виде в блок управления 6, где осуществляется окончательное измерение промежуточной (разностной) частоты биений лазерного передатчика и гетеродина, например, путем подсчета импульсов за фиксированный период времени. При обнаруженном изменении частоты вследствие нестабильности частоты передатчика или гетеродина, осуществляется подстройка величины сдвига частоты в блоках сдвига частоты ЛИ 10 и 12, что является более точным и эффективным, чем стабилизация частоты в лазерном передатчике в прототипе. Полупрозрачное зеркало 39 ответвляет весьма малую величину излучения лазерного передатчика 7 на вход блока измерения частоты 9, достаточную для нормальной работы этого блока. Основная часть излучения лазерного передатчика 7 (99,9%) проходит через зеркало 39 на вход управляемого ослабителя 58 и далее к отражательному зеркалу 49. Управляемый ослабитель 58 в стандартном режиме не осуществляет ослабления излучения и полностью пропускает весь проходящий световой поток. В качестве управляемых ослабителей лазерного излучения поз. 14, 15, 16 и 58 использованы выпускаемые промышленностью управляемые оптические приборы, обеспечивающие механическое перекрытие сечения проходящего пучка лазерного излучения по типу управляемой диафрагмы или управляемого затвора. Возможно также использование управляемых быстродействующих электрооптических модуляторов проходящего светового потока. Управляемые ослабители 14, 15, 16 предназначены для установления уровней гетеродинных лазерных излучений, обеспечивающих стандартный режим работы фотоприемных блоков 4, 27 и 25. Управляемые ослабители 14 и 15 осуществляют формирование на входе первого фотоприемного блока 4 двух гетеродинных лазерных излучений одинакового уровня. Управляемый ослабитель 58 осуществляет ослабление уровня сигнала лазерного передатчика 7, ответвляемого выносным уголковым отражателем 37 на вход телескопа 1, до уровня стандартной чувствительности первого фотоприемного блока 4. Управляемый пространственный фильтр 22 выполнен на основе оптического транспаранта, например, на базе жидких кристаллов и матрицы электродов, обеспечивающих управляемую электрическую адресацию по командам от блока управления 6, в результате чего осуществляется управление пропусканием отдельных элементов плоскости пространственного фильтра 22, совмещенной с фокальной плоскостью объектива 20, который формирует в этой плоскости пространственный спектр принимаемого информационного сигнала, подлежащего фильтрации. Различные управляемые транспаранты и пространственные фильтры на их основе, а также управляемые ослабители и управляемые оптические затворы на базе жидких кристаллов выпускаются промышленностью. Возможно также использование в качестве управляемого транспаранта электронно-лучевой светомодулирующей трубки с электронной адресацией пропускающих излучение элементов в фокальной плоскости объектива 20 [8].
В лазерном локаторе в качестве лазерного передатчика и лазерного гетеродина могут быть использованы современные лазерные генераторы с достаточно узкой полосой генерации лазерного излучения от ультрафиолетового до среднего инфракрасного диапазона длин волн. В настоящее время в указанных диапазонах имеется большое количество лазерных генераторов, обладающих также возможностью перестройки длины волны генерации в определенных пределах. Одновременно разработаны и выпускаются промышленностью различные акустооитические ячейки и устройства на основе оптических кристаллов, работающие в диапазонах длин волн от ультрафиолетового до ближнего и среднего инфракрасного диапазонов. Фотоприемные блоки выполнены на основе четырехплощадочных приемников лазерного излучения (первый и второй фотоприемные блоки поз. 4 и 25), а также на основе многоэлементных фотоприемных матриц (фотоприемный блок 27). В настоящее время существует большое количество фотоприемных устройств на различных физических принципах, работающих во всех указанных диапазонах длин волн. В предлагаемом лазерном локаторе возможно также использование многоэлементных двумерных матричных фотоприемников в фотоприемном блоке 4 при обеспечении согласования волновых фронтов принимаемого и гетеродинного лазерных излучений с помощью предложенной и использованной в данном лазерном локаторе системы автоматического управления направлением распространения гетеродинного лазерного излучения. Таким образом, на основе современной элементной базы квантовой электроники возможна реализация предложенного лазерного локатора, обладающего высокой эффективностью работы в условиях сильных фоновых засветок и обеспечивающего более высокую вероятность обнаружения быстро движущихся космических объектов и более высокую информативность и достоверность измеряемых параметров движения наблюдаемых объектов.
Предлагаемый лазерный локатор может быть использован в качестве устройства лазерной связи, для реализации связи с движущимися объектами, передвигающимися в приземном пространстве, а также для связи с космическими объектами в ближнем и дальнем космосе. При осуществлении лазерной космической связи предлагаемый лазерный локатор осуществляет обнаружение объекта и слежение за обнаруженным космическим объектом (космическим аппаратом) в режиме излучения зондирующего лазерного сигнала и приема отраженного лазерного подсвечивающего излучения. Одновременно лазерное излучение, формируемое лазерным передатчиком 7, подвергается модуляции информационным сигналом, поступающим от блока управления 6 на модулятор лазерного излучения, входящий в состав лазерного передатчика 7. Отраженный от наблюдаемого космического объекта модулированный лазерный сигнал после приема фотоприемным блоком 4, преобразования и предварительной фильтрации посредством блоков 19 и 22, подвергается узкополосной фильтрации и оцифровке во втором блоке спектральных фильтров 26 и далее направляется в блок управления 6 для окончательной обработки, демодуляции и получения информации, переданной с борта космического корабля. При этом последний должен быть оснащен приемо-передающим лазерным устройством, аналогичным лазерному локатору на фиг. 1. Возможен также прием и фильтрация принимаемого информационного сигнала с помощью первого блока спектральных фильтров 5. Следует отметить также возможность установления с помощью предлагаемого лазерного локатора непрерывной и устойчивой связи с космическим кораблем при осуществлении посадки на Землю и его входе в плотные слои атмосферы через слой плазмы, окружающей в этот момент космический корабль. При этом связь в радиодиапазоне прерывается, а связь в диапазоне лазерных излучений, например, в ближнем ИК-диапазоне, может быть осуществлена за счет прохождения лазерного излучения через слой плазмы без существенного поглощения. Высокая эффективность и надежность лазерной связи через слой плазмы обеспечивается также узкополосной фильтрацией во втором блоке фильтров 26 и наличием системы высокоточного отслеживания изменений доплеровской частоты и стабилизации промежуточной частоты с помощью блоков сдвига частоты лазерного излучения.
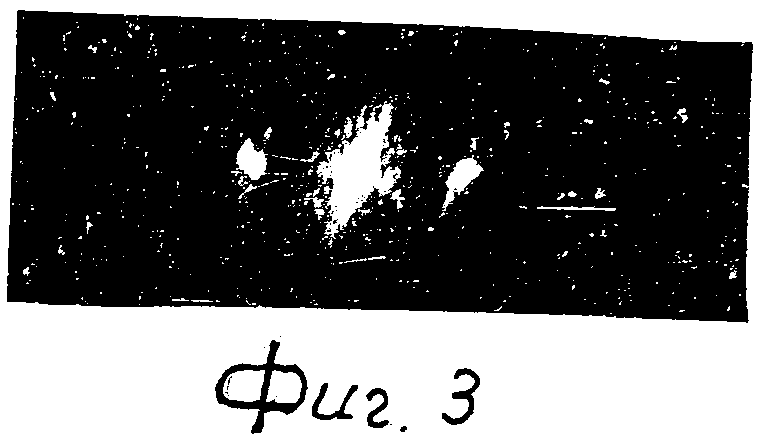
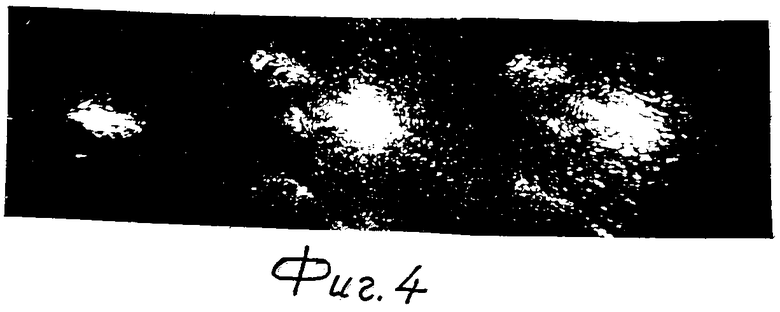
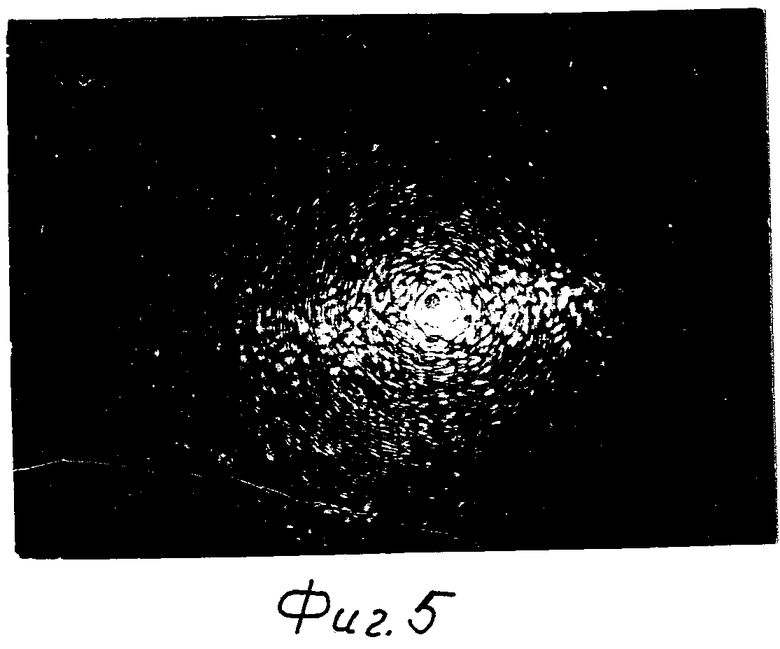
По материалам разработки предлагаемого лазерного локатора проведены экспериментальные исследования, подтвердившие увеличение эффективности работы предложенной системы локатора. На фиг. 3 и 4 приведен характерный вид пространственного спектра сигнала промежуточной частоты с выхода первого фотоприемного блока 4, сформированного акустооптическим модулятором 19 и объективом 20 в его фокальной плоскости, совмещенной с плоскостями управляемого пространственного фильтра 22 и фоточувствительной площадки третьего фотоприемного блока 27, с помощью которого зарегистрированы представленные пространственные спектры. На фиг. 3 представлен пространственный спектр сигнала первой промежуточной частоты, величина которой определяется расстоянием правого дифракционного порядка, представляющего собственно спектр принятого лазерного излучения, от центральной точки спектральной картины. Полученный спектр является симметричным, так как акустооптический модулятор работал в линейном режиме дифракции. На фиг. 4 представлен аналогичный пространственный спектр принимаемого лазерного излучения при увеличенном значении полученной первой промежуточной частоты, например, при введении дополнительного сдвига частоты первого гетеродинного лазерного излучения, осуществляемого первым блоком сдвига частоты лазерного излучения 10. При этом расстояние первого дифракционного порядка от центра симметричной картины спектра увеличивается. Величина указанного расстояния позволяет осуществить оценку изменения скорости движения наблюдаемого космического объекта и обеспечить высокоточное слежение за объектом и узкополосную фильтрацию принимаемых сигналов во втором блоке спектральных фильтров 26. На фиг. 5 представлен пространственный спектр флуктуаций принимаемого лазерного излучения, сформированный указанным выше способом на фоточувствительной площадке третьего фотоприемного блока 27 и полученный при расположении оси телескопа 1 вблизи мощного источника фоновых помех, например, вблизи солнечного диска при приеме в дневных условиях. Представленный на фиг. 5 высокий уровень внешних помех в предлагаемом лазерном локаторе может быть уменьшен с помощью осуществления предварительной фильтрации принимаемого лазерного излучения с помощью динамического спектрального фильтра 30, дополнительно вводимого в приемный оптический тракт лазерного локатора.
Следует отметить, что в предлагаемом лазерном локаторе возможно использование и реализация ряда оптимальных алгоритмов приема и обработки лазерных локационных сигналов, обеспечивающих повышение эффективности работы лазерного локационного комплекса слежения за космическими и наземными объектами и осуществления надежной и непрерывной связи с указанными объектами в сложных помеховых условиях.
Источники информации
[1] М. Росс, Лазерные приемники, М.: «Наука», 1969 г., стр. 156.
[2] Патент ФРГ, з. №2819320, 1979.
[3] Лазерная локация под ред. Н.Д. Устинова, М.: «Машиностроение», 1984 г., стр. 230.
[4] Лазерная локация под ред. Н.Д. Устинова, М.: «Машиностроение», 1984 г., стр. 245, (прототип). Оригинал: Appl. Opt. 1979; v. 18, №3, р. 290.
[5] Мустель Е.Р., Парыгин В.Н. Методы модуляции и сканирования света. М.: «Наука», 1970 г.
[6] Балакший В.И., Парыгин В.Н., Чирков Л.Е. Физические основы акустооптики. М.: Радио и связь, 1985 г., (стр. 219-234); (стр. 134-167).
[7] Балакший В.И., Манкевич С.К., Парыгин В.Н. и др. Квантовая электроника, т. 12, №4, 1985 г., стр. 743-748.
[8] Авторское свидетельство СССР №669976 от 28.02.1979. Манкевич С.К., Электронно-лучевая светомодулирующая трубка.
| название | год | авторы | номер документа |
|---|---|---|---|
| Лазерный голографический локатор | 2023 |
|
RU2812809C1 |
| ЛАЗЕРНАЯ ГОЛОГРАФИЧЕСКАЯ ЛОКАЦИОННАЯ СИСТЕМА | 2022 |
|
RU2790960C1 |
| ЛАЗЕРНАЯ ГОЛОГРАФИЧЕСКАЯ ПРИЕМНАЯ СИСТЕМА | 2022 |
|
RU2799499C1 |
| ЛАЗЕРНОЕ ПРИЕМНОЕ УСТРОЙСТВО | 2015 |
|
RU2584185C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2292566C1 |
| СИСТЕМА ИЗМЕРЕНИЯ КОНЦЕНТРАЦИИ БОРНОЙ КИСЛОТЫ В ПЕРВОМ КОНТУРЕ ТЕПЛОНОСИТЕЛЯ ЯДЕРНОГО ЭНЕРГЕТИЧЕСКОГО РЕАКТОРА | 2015 |
|
RU2594364C2 |
| ЛАЗЕРНАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ТЕПЛОНОСИТЕЛЯ ЯДЕРНОГО ЭНЕРГЕТИЧЕСКОГО РЕАКТОРА | 2018 |
|
RU2695091C2 |
| ЛАЗЕРНЫЙ КОГЕРЕНТНЫЙ ЛОКАТОР ДЛЯ РАКЕТ МОРСКОГО БАЗИРОВАНИЯ | 2014 |
|
RU2565821C1 |
| ЛАЗЕРНАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ТЕПЛОНОСИТЕЛЯ В ЭНЕРГЕТИЧЕСКОМ ЯДЕРНОМ РЕАКТОРЕ | 2019 |
|
RU2705725C2 |
| ЛАЗЕРНЫЙ КОГЕРЕНТНЫЙ ЛОКАТОР ЦЕЛЕУКАЗАНИЯ | 2014 |
|
RU2563312C1 |
Лазерный локатор содержит систему автоматического слежения и управления согласованием волновых фронтов принимаемого и гетеродинного лазерных излучений в плоскости фоточувствительной площадки фотоприемного блока лазерного локатора. Одновременно лазерный локатор содержит систему слежения и компенсации изменений доплеровских сдвигов частоты принимаемого лазерного излучения при осуществлении слежения за быстро движущимися космическими объектами. Высокоэффективная обработка принимаемых лазерных локационных сигналов методом оптического гетеродинирования реализована на основе высокоточных акустооптических элементов сдвига частоты и сканирования лазерного излучения. Технический результат - повышение эффективности работы системы лазерной локации в условиях слежения за движущимися удаленными космическими объектами, увеличение вероятности правильного обнаружения движущихся объектов в условиях сильных фоновых помех. 4 з.п. ф-лы, 5 ил.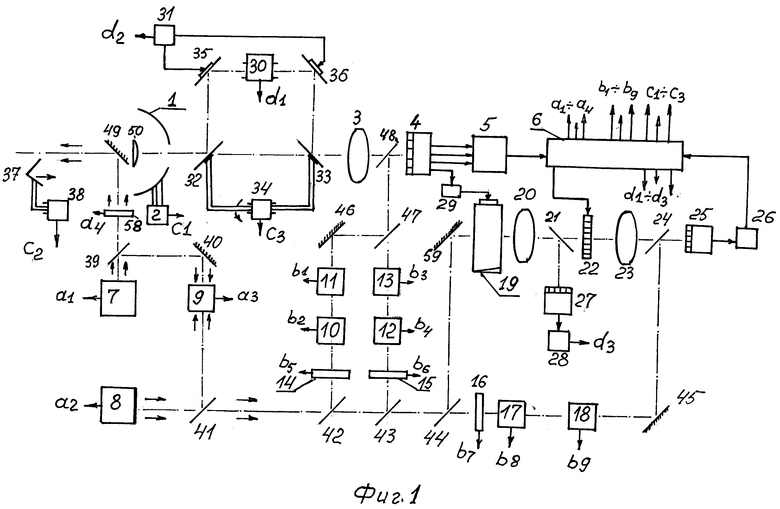
1. Лазерный локатор, содержащий последовательно установленные на первой оптической оси телескоп с блоком наведения, подключенным к блоку управления, первый объектив, первый фотоприемный блок, выход которого подключен к блоку спектральных фильтров, выходами подсоединенный к блоку управления, лазерный передатчик, лазерный гетеродин и блок измерения частоты, выход лазерного передатчика оптически связан с телескопом и, посредством полупрозрачного и отражательного зеркал, с первым оптическим входом блока измерения частоты, второй оптический вход которого оптически связан посредством полупрозрачного зеркала с оптическим выходом лазерного гетеродина, управляющие входы лазерного передатчика, лазерного гетеродина и выход блока измерения частоты подключены к блоку управления, отличающийся тем, что введены последовательно оптически связанные первый управляемый ослабитель, первый блок сдвига частоты лазерного излучения, первый блок сканирования лазерного излучения, оптический выход которого посредством отражательного и двух полупрозрачных зеркал оптически связан с оптическим входом первого фотоприемного блока, последовательно оптически связанные второй управляемый ослабитель, второй блок сдвига частоты лазерного излучения, второй блок сканирования лазерного излучения, оптический выход которого посредством двух полупрозрачных зеркал оптически связан с оптическим входом первого фотоприемного блока, оптические входы первого и второго управляемых ослабителей оптически связаны посредством полупрозрачных зеркал с оптическим выходом лазерного гетеродина, последовательно оптически связанные третий управляемый ослабитель, третий блок сдвига частоты лазерного излучения и третий блок сканирования лазерного излучения, последовательно установленные на второй оптической оси оптически связанные акустооптический модулятор с блоком управления, второй объектив, первое полупрозрачное зеркало, управляемый пространственный фильтр, третий объектив, второе полупрозрачное зеркало, второй фотоприемный блок, выход которого подсоединен ко входу второго блока спектральных фильтров, подключенного к блоку управления, оптический вход акустооптического модулятора оптически связан посредством отражательного зеркала и полупрозрачного зеркала с оптическим выходом лазерного гетеродина, оптический выход третьего блока сканирования лазерного излучения оптически связан посредством отражательного зеркала и второго полупрозрачного зеркала с оптическим входом второго фотоприемного блока, оптический вход третьего управляемого ослабителя оптически связан с оптическим выходом лазерного гетеродина, третий фотоприемный блок, оптический вход которого связан посредством первого полупрозрачного зеркала с оптическим выходом второго объектива, а выход подсоединен к блоку управления фотоприемным блоком, подключенного к блоку управления, а также введены первое и второе выносные зеркала, механически связанные с блоком перемещения, управляющий вход которого подключен к блоку управления, динамический спектральный фильтр, оптический вход которого посредством первого сканирующего зеркала и первого выносного зеркала оптически связан с оптическим выходом телескопа, оптический выход динамического спектрального фильтра посредством второго сканирующего зеркала и второго выносного зеркала оптически связан с оптическим входом первого объектива, управляющие электроды первого и второго сканирующих зеркал подсоединены к блоку управления сканирующими зеркалами, вход которого подключен к блоку управления, а управляющий вход динамического спектрального фильтра подключен к блоку управления, выносной уголковый отражатель, оптически связанный с оптическим входом телескопа и механически связанный с блоком перемещения уголкового отражателя, подключенного к блоку управления, четвертый управляемый ослабитель, оптически связывающий оптический выход лазерного передатчика с телескопом, управляющие входы управляемых ослабителей подключены к блоку управления, управляющие входы блоков сдвига частоты лазерного излучения и блоков сканирования лазерного излучения подключены к блоку управления.
2. Лазерный локатор по п.1, отличающийся тем, что в нем блок сдвига частоты лазерного излучения содержит последовательно установленные на оптической оси оптически связанные входную диафрагму, акустооптическую ячейку с блоком управления, первую линзу, точечную диафрагму, вторую линзу и выходную диафрагму, при этом управляющий электрод акустооптической ячейки подключен к блоку управления акустооптической ячейкой.
3. Лазерный локатор по п.1, отличающийся тем, что в нем блок сканирования лазерного излучения выполнен на основе акустооптической ячейки, в которой возбуждены ультразвуковые волны, обеспечивающие изменение направления распространения лазерного излучения.
4. Лазерный локатор по п.1, отличающийся тем, что в нем динамический спектральный фильтр выполнен на основе акустооптической ячейки, в которой возбуждены ультразвуковые волны, взаимодействующие с проходящим через ячейку принимаемым лазерным излучением.
5. Лазерный локатор по п.1, отличающийся тем, что в нем лазерный передатчик и лазерный гетеродин выполнены на основе лазерных генераторов с возможностью перестройки длины волны генерируемого лазерного излучения.
| АДАПТИВНЫЙ ЛАЗЕРНЫЙ ДОПЛЕРОВСКИЙ ЛОКАТОР | 1990 |
|
RU2012013C1 |
| US 5069545 A1 03.12.1991 | |||
| US 4516853 A1 14.05.1985 | |||
| ЛАЗЕРНЫЙ ЛОКАТОР | 2011 |
|
RU2456636C1 |
| ПРИЕМОПЕРЕДАЮЩЕЕ УСТРОЙСТВО ЛАЗЕРНОГО ЛОКАТОРА | 1986 |
|
RU2048686C1 |

