Изобретение относится к системам обмена данными и может быть использовано для реализации информационного обмена между источниками (получателями) информации, расположенными на подвижных объектах (ПО), и источниками (получателями) информации, расположенными на земле, через наземные комплексы (НК) и наземную сеть передачи данных.
В системе радиосвязи с подвижными объектами [1] во время движения подвижные объекты, находящиеся в пределах радиогоризонта, обмениваются данными с наземным комплексом связи. Принимаемые наземным комплексом связи из канала «воздух-земля» сообщения через аппаратуру передачи данных (АПД) поступают в вычислитель автоматизированного рабочего места (АРМ) оператора связи на базе ПЭВМ, где в соответствии с принятым в системе протоколом обмена производится идентификация принятого в сообщении адреса с адресами подвижных объектов, хранящимися в его памяти. При совпадении адреса подвижного объекта с хранящимся в списке адресом информация о местоположении, параметрах движения ПО и состоянии его датчиков выводится на экран монитора наземного АРМ. В вычислителе АРМ на базе ПЭВМ решается задача обеспечения непрерывной радиосвязи со всеми N ПО. При выходе за пределы радиогоризонта хотя бы одного из ПО или приближении к границе зоны устойчивой радиосвязи, определяется программно один из ПО, который назначается ретранслятором сообщений. По результатам анализа местоположения и параметров движения остальных ПО определяются оптимальные пути доставки сообщений к удаленному от НК за радиогоризонт подвижному объекту. Сообщение от НК через последовательную цепочку, состоящую из (N-1) ПО, может быть доставлено N-му ПО. Для этого на НК в формирователе типа ретранслируемых сообщений в заранее определенные разряды (заголовок) передаваемой кодограммы закладываются номер ПО, назначенного ретранслятором, и адреса подвижных объектов, обеспечивающих заданный трафик сообщения.
Принятые на ПО сообщения анализируются в блоке анализа типа сообщений. После анализа решается вопрос о направлении данных по двунаправленной шине в систему управления подвижного объекта или ретрансляции их на соседний ПО.
В обычном режиме, когда не требуется ретрансляция сигналов с НК, осуществляется адресный опрос ПО путем формирования сообщения для передачи в канал радиосвязи в соответствии с протоколом обмена. Набираемое оператором (диспетчером) сообщение отображается на мониторе АРМ.
На ПО после прохождения через антенну, радиостанцию, аппаратуру передачи данных сигнал поступает в бортовой вычислитель, где происходит идентификация принятого в сообщении адреса с собственным адресом подвижного объекта. Далее сообщение передается в блок анализа типа ретранслируемого сообщения, где происходит дешифрация полученного заголовка (служебной части) сообщения и определяется, в каком режиме должна работать аппаратура ПО. Информационная часть сообщения записывается в память бортового вычислителя и при необходимости выводится на экран блока регистрации данных.
Формирователи типа ретранслируемых сообщений позволяют обеспечить обмен цифровыми данными по каналу «оператор-пилот» (CPDLC) взамен существующей речевой информации. Они предназначены для выбора элементов сообщений разрешения/информации/запроса, которые соответствуют принятой речевой фразеологии, и набора произвольного текста. Отображение набираемых и принятых сообщений осуществляется на блоке регистрации данных ПО и мониторе АРМ НК соответственно.
Сообщения с выходов приемников сигналов глобальных навигационных спутниковых систем ГЛОНАСС/GPS записываются в память наземного и бортового вычислителей с привязкой к глобальному времени и используются для расчета навигационных характеристик и параметров движения каждого ПО. Принятые на НК навигационные сообщения от всех ПО обрабатываются в вычислителе и выводятся на экран монитора АРМ.
Однако указанной выше системе присущи следующие недостатки:
- радиостанции работают только на фиксированных частотах, видах кодирования и модуляции;
- отсутствует защита от источника помех.
Известна система радиосвязи с подвижными объектами [2]. Она отличается от упомянутой выше системы тем, что в ней имеются наземные и бортовые антенны и радиостанции ДКМВ дальней связи. В результате размер зоны гарантированного управления (связи) НК не ограничивается радиусом прямой радиовидимости R. Кроме того, К бортовых широкодиапазонных антенно-фидерных устройства (ШД АФУ), подключены двунаправленными радиочастотными кабелями к К бортовым широкодиапазонным радиочастотным модулям (ШД РМ), которые связаны аналоговыми высокочастотными кабелями с модулем физического уровня (МФУ), который имеет двухсторонний цифровой интерфейс с модулем канального уровня (МКУ). МКУ соединен двухсторонним цифровым интерфейсом через модуль маршрутизации (ММ) с модулем интерфейсов (МИ). Входы МИ подключены к бортовым датчикам, приемнику навигационной спутниковой системы, бортовому формирователю типа ретранслируемых сообщений, выход подключен к блоку регистрации данных, второй вход/выход подключен к бортовому анализатору типа принимаемых сообщений, третий вход/выход к бортовому вычислителю, связанному с помощью двунаправленного интерфейса с бортовой системой управления ПО. Наземные антенны MB и ДКМВ диапазонов связаны соответственно с радиостанциями MB и ДКМВ диапазонов, подключенными двухсторонними связями через аппаратуру передачи данных к первому входу/выходу вычислителя автоматизированного рабочего места (АРМ), второй вход/выход которого подключен к управляющему входу/выходу радиостанции ДКМВ, третий вход/выход подключен к входу/выходу наземной системы связи, первый вход подключен к приемнику сигналов глобальных навигационных спутниковых систем (ГЛОНАСС/GPS), второй вход подключен к пульту управления АРМ, третий вход - к формирователю типа ретранслируемых сообщений, а выход - к монитору АРМ.
Система радиосвязи с подвижными объектами обеспечивает обмен пакетами данных между бортовыми пользователями упомянутой системы (системой управления ПО) и наземными конечными пользователями системы радиосвязи - диспетчерскими пунктами (ДП) управления воздушным движением (УВД) и оперативного авиационного контроля (OAK), а также центром управления (ЦУ) системой обмена данными, который заключается в следующем. Передачу данных в MB диапазоне с НК обеспечивают по цепочке последовательно соединенных первого ПО, второго ПО и далее до N-го ПО, а передачу данных с N-го ПО на НК осуществляют в обратном порядке. Наземную сеть передачи данных подключают двухсторонними интерфейсами к каждому из М разнесенных территориально НК. Таким образом, наземной сетью передачи данных объединяют между собой все НК по информационному взаимодействию и обеспечивают соединение каждого НК с наземными пользователями системы связи (ДП УВД И OAK) и центром управления (ЦУ) системой связи, основной задачей которого является частотная диспетчеризация - назначение разрешенных частот MB и ДКМВ связи для НК и ПО через наземную сеть связи.
Передачу данных «воздух-земля» в MB диапазоне между ПО и НК осуществляют на рабочей частоте, назначаемой ЦУ для каждого НК. Передачу данных «воздух-воздух» в MB диапазоне между ПО осуществляют на рабочей частоте «воздух-воздух», также назначаемой ЦУ. Список частотной поддержки MB связи, содержащий список М наземных комплексов НК с их адресами, координатами, назначенными им частотами, а также частотой связи «воздух-воздух», разрабатывают в ЦУ и доводят по наземной системе связи до каждого НК, а также во время предполетной подготовки до каждого ПО.
Передачу данных в ДКМВ диапазоне между ПО и НК осуществляют на рабочей частоте, назначаемой ЦУ для каждого НК по результатам долгосрочного прогноза на каждые 2 часа. В центре управления системой связи по долгосрочному прогнозу разрабатывают таблицу частотно-временного расписания ДКМВ связи для каждого НК на сутки и доводят до НК по наземной системе связи. В ЦУ также разрабатывают системную таблицу ДКМВ связи, содержащую список М наземных комплексов НК системы связи с их координатами, адресами и таблицами их частотно-временного расписания, и доводят до каждого ПО во время предполетной подготовки через наземную сеть передачи данных.
Воздушное пространство разбивают на информационные районы полета (ИРП) размером 1000-1200 км. В каждом ИРП располагают хотя бы один НК, ответственный за информационное обеспечение полетом. Осуществляют связь с НК каждого ПО, находящегося в зоне ответственности данного НК, или в MB диапазоне, или в ДКМВ диапазоне в зависимости от удаления от НК. В зоне прямой радиовидимости (до 200-300 км) обеспечивают связь в MB диапазоне за пределами прямой видимости, если не удается увеличить радиус зоны управления до 1000-1200 км с помощью ретрансляции по каналам «воздух-воздух» MB диапазона, связь организуют в ДКМВ диапазоне.
В ДКМВ диапазоне для передачи данных используют традиционные не адаптивные модемы с защитным интервалом для борьбы с многолучевостью, которые обеспечивают символьную скорость 75, 150, 300 Бод и скорость передачи данных пользователя, не превышающую 18, 37, 75 бит/с с учетом кодирования Рида-Соломона с четырехкратной избыточностью. Для ведения ДКМВ связи используют частоту из таблицы частотно-временного расписания НК, в зоне ответственности которого находится ПО.
Однако указанной выше системе присущи следующие недостатки:
- радиостанции работают только на фиксированных частотах, видах кодирования и модуляции;
- отсутствует защита от источника помех;
- при повышении интенсивности обмена данными возрастает вероятность коллизий случайного доступа в сети обмена, что снижает эффективное использование пропускной способности канала связи и может явиться причиной недопустимо больших задержек передачи сообщений.
Наиболее близкой по назначению и большинству существенных признаков является система радиосвязи с подвижными объектами [3], которая принята за прототип. Система радиосвязи с подвижными объектами, как и предыдущий аналог, состоит из М территориально разнесенных наземных комплексов связи и N подвижных объектов, связанных между собой каналами связи «воздух-воздух» MB диапазона, а каналами радиосвязи «воздух-земля» MB и ДКМВ диапазонов с М наземными комплексами. Наземные комплексы соединены между собой и с внешними абонентами через наземную сеть передачи данных. Каждый подвижный объект содержит К бортовых широкодиапазонных антенно-фидерных устройств, подключенных двухсторонними связями через последовательно соединенные К бортовых широкодиапазонных радиочастотных модулей, модуль физического уровня, модуль канального уровня, модуль маршрутизатора и модуль интерфейсов к бортовому вычислителю. Один из входов/выходов бортового вычислителя связан с помощью двунаправленного интерфейса с бортовой системой управления подвижным объектом. Входы модуля интерфейса подключены к бортовым датчикам, приемнику навигационной спутниковой системы, бортовому формирователю типа ретранслируемых сообщений а его выход - к блоку регистрации данных. Второй вход/выход модуля интерфейсов подключен к бортовому анализатору типа принимаемых сообщений, а третий вход/выход - к бортовому вычислителю. Каждый наземный комплекс содержит связанные между собой двунаправленным интерфейсом блок цифровой обработки сигналов (БЦОС) и персональную электронно-вычислительную машину (ПЭВМ), подключенную двухсторонними связями к вычислителю автоматизированного рабочего места (АРМ). Второй вход/выход вычислителя АРМ подключен к входу/выходу наземной сети передачи данных с входом/выходом системы. Первый вход вычислителя АРМ подключен к приемнику сигналов глобальных навигационных спутниковых систем, второй вход - к наземному формирователю типа ретранслируемых сообщений, третий вход - к формирователю типа ретранслируемых сообщений, а выход - к монитору АРМ. В каждый наземный комплекс установлены n наземных широкодиапазонных антенно-фидерных устройства, подключенных двухсторонними связями через n наземных широкодиапазонных радиочастотных модулей к соответствующим n входам/выходам БЦОС. С помощью m наземных передающих антенн ДКМВ диапазона, подключенных двухсторонними связями через m наземных передатчиков ДКМВ диапазона к соответствующим m входам/выходам БЦОС, обеспечивается обмен данными с ПО, находящимися за пределами радиогоризонта. Управление процедурами обработки сигналов в БЦОС осуществляется программно с помощью вычислителя АРМ. Принцип работы прототипа, в основном, совпадает со вторым аналогом.
Недостатки прототипа, на устранение которых направлено изобретение, следующие:
- неэффективно используется частотный спектр выделенного радиодиапазона;
- не осуществляется анализ всех принимаемых сообщений для выделения предназначенных абоненту неискаженных данных;
- не используется анализ всех сообщений одного и того же назначения, но переданных по разным каналам различных диапазонов;
- отсутствуют на всех НК и ПО сведения о характеристиках абонентов системы;
- затруднены автоматическое обнаружение неисправностей, реконфигурация системы для восстановления работоспособности без прерывания нормального функционирования.
Задачей, на решение которой направлено заявляемое изобретение, является расширение функциональных возможностей системы, а именно ускорение процедуры решения задач планирования частот связи, эффективное использование выделенного частотного спектра радиодиапазона, уменьшение влияния помех на достоверность передачи информации из-за осведомленности о внешних вторжениях и упрощение взаимодействия между разнесенными абонентами.
Поставленная задача решается за счет:
- автоматического анализа радиоэфира в максимально возможном по широте диапазоне частот и выявления таких участков электромагнитного спектра, которые временно менее всего загружены и доступны для организации на них каналов связи;
- динамической перестройки, смены не только рабочих частот, формы диаграмм направленности антенн, но и технологии радиодоступа;
- информации о собственных вычислительных (программных) возможностях и характеристиках других абонентов, текущем состоянии эфира и алгоритме действий, которые могут выполнять абоненты системы;
- "гибкого" программируемого изменения конфигурации;
- организации единой синхронизации в радиосети;
- построения аппаратуры на принципах программного выполнения основных функций в узлах системы;
- наличия базы данных о текущих характеристиках абонентов системы с входом для текущего обновления массивов.
Техническим результатом изобретения является:
- программная реализация бортового и наземного оборудования, упрощающая введение известных новых и реализацию существующих режимов обмена данными за счет автоматического изменения программного обеспечения;
- повышение надежности связи за счет автоматического выбора сообщения, принятого по радиоканалу с наилучшим отношением сигнал/шум и использования критерия максимального правдоподобия, обработку сообщений на канальном уровне с помощью избыточных циклических кодов для устранения ошибок, не исправленных модемом, и исправление этих ошибок с помощью автоматического запроса повторения;
- динамическая перестройка не только рабочих частот, формы диаграмм направленности антенн, но и технологии радиодоступа;
- эффективное использование выделенного частотного спектра радиодиапазона;
- применение адаптивных процедур при работе с источниками помех;
- увеличение эксплуатационной надежности системы, благодаря реализации не только на подвижных объектах, но и в наземных комплексах концепции интегрированной модульной авионики, основанной на обеспечении отказоустойчивых режимов работы оборудования за счет автоматического обнаружения и изоляции неисправных модулей, автоматической замены их на резервные без прерывания нормальной работы.
Указанный технический результат достигается тем, что в известной системе радиосвязи с подвижными объектами, имеющей в своем составе М территориально разнесенных наземных комплексов связи и N подвижных объектов, связанных между собой каналами связи «воздух-воздух», а также связанных с помощью каналов радиосвязи «воздух-земля» с М наземными комплексами, которые соединены между собой и с внешними абонентами через наземную сеть передачи данных с входом/выходом системы, каждый подвижный объект содержит К бортовых широкодиапазонных антенно-фидерных устройств, подключенных двухсторонними связями к соответствующим входам/выходам К бортовых широкодиапазонных радиочастотных модулей, бортовой модуль физического уровня (МФУ), соединенный двухсторонними связями с модулем канального уровня (МКУ) вычислительного модуля связи, состоящего из последовательно соединенных двунаправленными интерфейсами модуля канального уровня, модуля маршрутизатора и модуля интерфейса, входы модуля интерфейса подключены к бортовым датчикам, приемнику глобальной навигационной спутниковой системы, бортовому формирователю типа ретранслируемых сообщений, выход модуля интерфейса подключен к блоку регистрации данных, второй вход/выход модуля интерфейса подключен к бортовому анализатору типа принимаемых сообщений, третий вход/выход - к бортовому вычислителю, связанному с помощью двунаправленного интерфейса с бортовой системой управления подвижным объектом, а каждый наземный комплекс связи содержит m наземных широкодиапазонных антенно-фидерных устройств, подключенных двухсторонними связями к входам/выходам m наземных широкодиапазонных радиочастотных модулей, блок цифровой обработки сигналов (БЦОС), связанный двунаправленным интерфейсом с вычислителем автоматизированного рабочего места (АРМ), второй вход/выход которого подключен к входу/выходу наземной сети передачи данных с входом/выходом системы, первый вход вычислителя АРМ подключен к приемнику сигналов глобальных навигационных спутниковых, систем, второй вход - к наземному формирователю типа ретранслируемых сообщений, третий вход - к пульту управления АРМ, а выход - к монитору АРМ, в каждый наземный комплекс дополнительно введены m фазовращателей, подключенных двухсторонними связями к соответствующим m входам/выходам наземного модуля физического уровня (НМФУ) и к соответствующим входам/выходам m наземных широкодиапазонных радиочастотных модулей, а управляющие входы/выходы m фазовращателей - к соответствующим m входам/выходам вычислителя АРМ, НМФУ через последовательно соединенные двухсторонними связями и расположенные в БЦОС наземный модуль канального уровня (НМКУ) блока цифровой обработки сигналов, вычислитель БЦОС подключен двухсторонними связями к вычислителю АРМ, а также к базе данных БЦОС, база данных АРМ двухсторонними связями подключена к соответствующему входу/выходу вычислителя АРМ, а управляющие входы/выходы m наземных широкодиапазонных радиочастотных модулей, НМФУ и НМКУ соединены с соответствующими входами/выходами вычислителя АРМ, в каждый ПО дополнительно введены К фазовращателей, подключенных двухсторонними связями к соответствующим К входам/выходам бортового модуля физического уровня (МФУ) и к соответствующим входам/выходам К бортовых широкодиапазонных радиочастотных модулей, а управляющие входы/выходы фазовращателей - к соответствующим К входам/выходам бортового вычислителя, управляющие входы/выходы К бортовых широкодиапазонных радиочастотных модулей, МФУ и МКУ подключены двухсторонними связями к соответствующим входам/выходам бортового вычислителя, бортовой вычислитель имеет вход/выход для загрузки соответствующих данных.
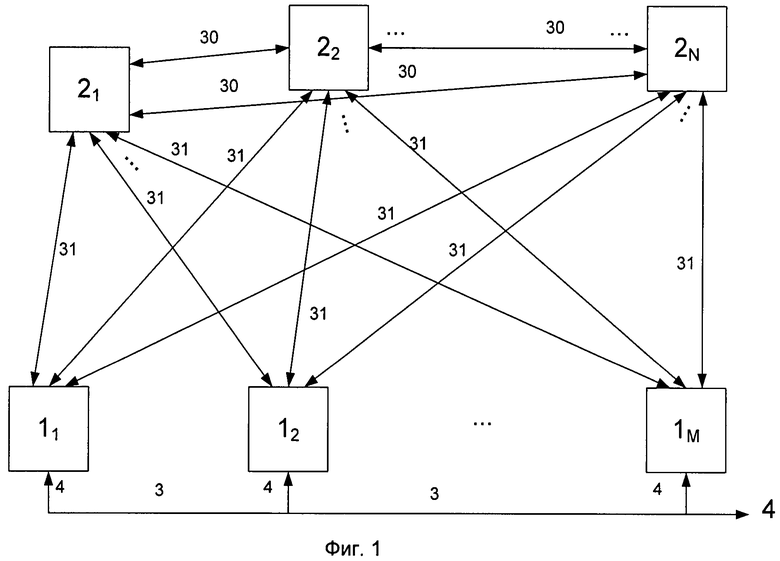
Структурная схема заявляемой системы радиосвязи с подвижными объектами, представленная на фиг.1, где обозначено:
1 - наземный комплекс связи;
2 - подвижный объект, оснащенный бортовым комплексом связи, структурная схема которого приведена на фиг.2;
3 - наземная сеть передачи данных с входом/выходом 4.
N подвижных объектов 2 связаны между собой каналами 30 связи «воздух-воздух» и с помощью каналов 31 радиосвязи «воздух-земля» с соответствующими НК 1, которые объединены между собой и наземными пользователями системы с помощью входов/выходов 4 наземной сети 3 передачи данных.
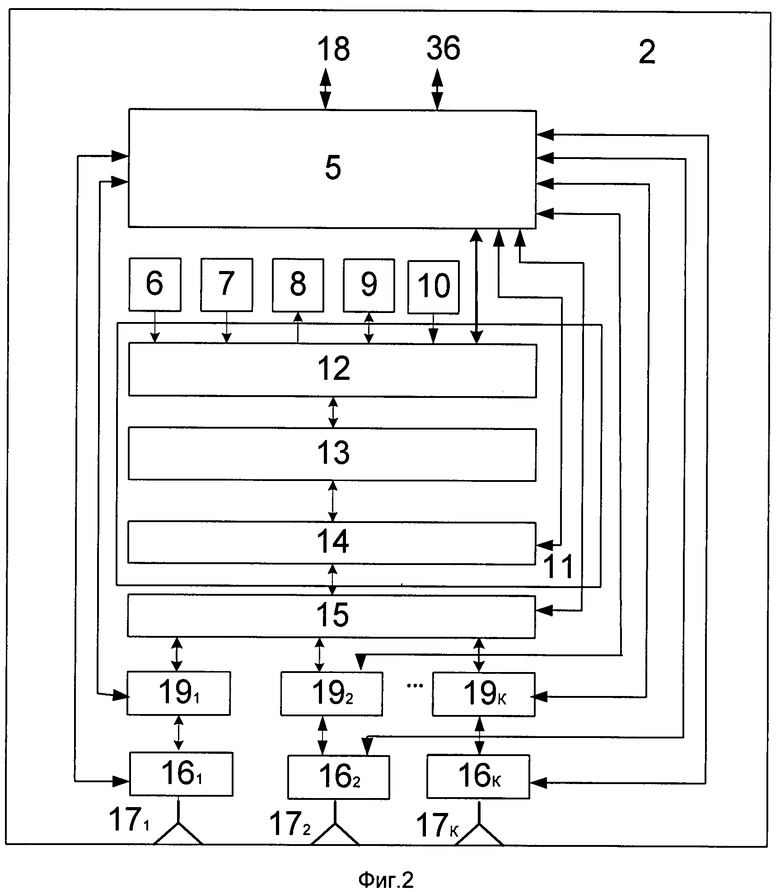
Структурная схема бортового комплекса связи подвижного объекта 2 заявляемой системы радиосвязи с подвижными объектами приведена на фиг.2, где обозначено:
5 - бортовой вычислитель;
6 - бортовые датчики;
7 - бортовой приемник сигналов глобальной навигационной спутниковой системы, например ГЛОНАСС/GPS с антенной;
8 - блок регистрации данных;
9 - бортовой анализатор типа принимаемых сообщений;
10 - бортовой формирователь типа ретранслируемых сообщений;
11 - вычислительный модуль связи (ВМС);
12 - модуль интерфейсов с бортовым оборудованием (МИ);
13 - модуль маршрутизации (ММ);
14 - модуль канального уровня (МКУ);
15 - модуль физического уровня (МФУ);
16 - бортовой широкодиапазонный радиочастотный модуль (ШД РМ);
17 - бортовое широкодиапазонное антенно-фидерное устройство (ШД
АФУ);
18 - двунаправленная шина бортового интерфейса;
19 - фазовращатель;
36 - вход/выход бортового вычислителя для загрузки соответствующих данных.
Структурная схема наземного комплекса 1 заявляемой системы радиосвязи с подвижными объектами представлена на фиг.3, где обозначено:
4 - вход/выход наземной сети 3 передачи данных;
20 - наземное широкодиапазонное антенно-фидерное устройство;
21 - наземный широкодиапазонный радиочастотный модуль;
22 - фазовращатель;
23 - наземный модуль физического уровня (НМФУ);
24 - вычислитель автоматизированного рабочего места (АРМ);
25 - наземный приемник сигналов глобальных навигационных спутниковых систем с антенной;
26 - формирователь типа ретранслируемых сообщений;
27 - монитор АРМ;
28 - пульт управления АРМ;
29 - наземный блок цифровой обработки сигналов (БЦОС);
32 - наземный модуль канального уровня (МКУ);
33 - вычислитель БЦОС;
34 - база данных БЦОС;
35 - база данных АРМ.
Заявляемая система радиосвязи с ПО является многоканальной и работает следующим образом. На подвижном объекте 2 имеется К каналов, а на НК 1 - m каналов. Числа Кит выбираются из условий обеспечения заданной аппаратной надежности и достоверности передачи информации, одновременного обслуживания требуемого количества ПО 2, обеспечения заданной зоны радиосвязи и выделенных диапазонов частот. Узлы 16, 17 и 19 на ПО 2, узлы 20, 21 и 22 на НК 1 являются универсальными и предназначены для работы в нескольких диапазонах волн, например метровом, дециметровом, сантиметровом, миллиметровом и т.п. Оценка уровня загрузки спектральной полосы в выделенных диапазонах, управление динамическим доступом к спектральным радиочастотным ресурсам, формам используемых радиосигналов и положению диаграмм направленности антенн на ПО 2 и НК 1 осуществляется программно с помощью управляющих сигналов бортового вычислителя 5 и вычислителя 33 БЦОС 29, вычислителя 24 АРМ.
Во время движения подвижные объекты 2, находящиеся в пределах радиогоризонта НК 1, обмениваются с ним данными по радиолиниям связи, параметры которых позволяют обеспечить устойчивую связь в зоне прямой (оптической) видимости. Принимаемые одним из наземных ШД АФУ 20 из канала «воздух-земля» сообщения через узлы 20, 23, 29 поступают в вычислитель 24 АРМ, который может быть выполнен, например, на базе серийной ПЭВМ. В нем в соответствии с принятым в системе протоколом обмена проводится идентификация принятого в сообщении адреса ПО 2 с адресами всех обслуживаемых системой подвижных объектов, хранящимися в базе 35 данных АРМ. При совпадении адреса подвижного объекта 2 с хранящимся в списке адресом информация о местоположении, параметрах движения ПО 2 и состоянии его датчиков запоминается в вычислителе 24 АРМ. При отсутствии в базе 35 данных АРМ принятого в сообщении адреса или при превышении времени задержки ответного сообщения полученная информация стирается. За счет взаимного обмена данными между НК 1 по сети 3 в каждом наземном вычислителе 24 АРМ решаются задачи обеспечения постоянной устойчивой радиосвязи со всеми N ПО 2 и на основе информации о точном местонахождении всех ПО 2 и параметрах их движения, получаемой с узла 7, осуществляются операции запоминания этих сообщений в наземном вычислителе 24 АРМ и вывод необходимых данных на экран монитора 27 АРМ НК 1 в виде, удобном для восприятия оператором (диспетчером).
При организации обмена данными пользователей, например диспетчерских пунктов УВД, с ПО 2 через наземную сеть 3 передачи данных с входом/выходом 4, информация, например, по протоколу Х.25 поступает на вычислитель 24 АРМ НК 1. В вычислителе 24 АРМ определяется наличие выбранного ПО 2 в зоне обслуживания этого наземного комплекса 1. Если наличие ПО 2 подтверждается, то по информации с базы 35 данных АРМ определяется направление на него, выделенный диапазон и рабочие частоты, на которых будет проводиться сеанс связи. С выхода вычислителя 24 АРМ посылаются соответствующие управляющие сигналы на узлы 20 (через узлы 21), 22, 23, 32, 33 и с помощью полученных данных формируется сообщение, содержащее адрес получателя - (адрес борта ПО 2), а также адрес отправителя, например диспетчерского пункта УВД) поступает в вычислитель 33 БЦОС 29, где в соответствии с информацией с базы 34 данных БЦОС реализуются заложенные протоколы сетевого уровня для обмена данными, например, ARINC 635, 631, 750, DO-224, ED-108. Затем с помощью НМКУ 32, входящего в состав блока 29 цифровой обработки сигналов, НМФУ 23 реализуются протоколы канального и физического уровней, используемые для обмена данными (модемов-кодеков), где осуществляют известные операции, например, [4, 5, 6, 7, 8, 9, 10, 11]:
- кодирование данных для коррекции ошибок;
- перемежение данных для борьбы с пакетированием ошибок из-за замираний и импульсных помех;
- скремблирование данных для выравнивания спектра передаваемого сигнала;
- формирование ключевой синхронизирующей последовательности и преамбулы, содержащей известную последовательность для реализации адаптивных методов приема сообщения;
- формирование заданной формы огибающей каждого символа типа приподнятого косинуса для обеспечения заданной спектральной маски излучаемого сигнала.
Сформированный для передачи радиосигнал с выхода модуля 23 подают на вход одного из m наземных широкодиапазонных радиочастотных модулей 22 (НШД РЧ), в котором с помощью управляющих воздействий вычислителя 24 АРМ подготовлены условия для формирования радиосигнала, излучаемого через соответствующую ШД АФУ 20, а именно требуемый уровень мощности, рабочая частота. Затем усиленный радиосигнал через широкодиапазонное АФУ 20 передают по радиоканалу на ПО 2. При необходимости для увеличения энергетического потенциала радиолинии формируют в широкодиапазонном АФУ 20 узкую диаграмму направленности антенны (ДНА) и устанавливают ее в направлении на обслуживаемое ПО 2 с помощью управляющих сигналов с вычислителя 24 АРМ, поданных через соответствующие узлы 21.
Для обеспечения связи на каждом НК 1 на разрешенных частотах производят излучение сигналов маркеров, которые являются сигналами связи/управления/синхронизации с известными формой сигнала, периодом повторения и временем излучения. Эти сведения закладываются в базы данных БЦОС 34 и АРМ 35, а также в бортовой вычислитель 5. Сигналы маркеров разнесены во времени и по частоте так, чтобы ПО 2 могли оценить качество сигналов разных наземных комплексов и выбрать НК 1 для связи. На каждом ПО 2 по результатам оценки качества принятых сигналов маркеров разных НК для каждого диапазона волн выбирают лучшую (вероятностно-оптимальную) частоту связи.
В процессе движения на ПО 2 и НК 1 инициируют процедуру поиска частоты, например сканирование по известным радиочастотам, заложенным в базу 35 данных АРМ и бортовой вычислитель 5 с помощью входа/выхода 36 до тех пор, пока не обнаружат правильный пакет от наземного комплекса с приемлемым адресом источника, или пока не истечет заданное время таймера сканирования. В таком случае на ПО настраиваются на другую частоту и продолжают сканирование в бортовом вычислителе 5 и вычислителе 24 АРМ. На ПО 2 радиосигнал от ШД АФУ 17 подают на ШД РМ 16, с выхода которого через соответствующий фазовращатель 19 сигнал подают на вход МФУ 15, где его демодулируют, дескремблируют, деперемежают, декодируют с коррекцией ошибок, и выдают в МКУ 14, где его проверяют на наличие не исправленных декодером ошибок и в случае отсутствия ошибок упаковывают в пакет, например ISO 8208, и выдают на вход ММ 13, где его преобразуют в сообщение, предназначенное для передачи через МИ 12 к бортовым пользователям (блокам 5, 8, 9 или через блок 5 на шину 18).
В процессе обмена данными от ПО 2 к получателю информации на каждом ПО 2 пакетное сообщение от бортовых конечных систем (5, 6, 18), содержащее адрес получателя и адрес отправителя, передают от бортового вычислителя 5 через модуль 12 интерфейса в модуль 13 маршрутизатора, где его упаковывают в пакет, например ISO 8208 сетевого уровня, и передают в модуль 14 канального уровня для преобразования в сообщение канального уровня, содержащее проверочные последовательности, вычисленные с помощью избыточного циклического кода, и передачи его в модуль 15 физического уровня, где осуществляют операции, указанные выше при рассмотрении процедур обработки сигналов на НК 1.
Сформированный на ПО 2 для передачи сигнал с выхода модуля 15 через соответствующий фазовращатель 19 подают на вход бортового широкодиапазонного радиочастотного модуля 16 (БШД РЧ), где его усиливают до требуемого уровня мощности, подают на бортовое широкодиапазонное АФУ 17 и передают по радиоканалу на наземный комплекс 1, на котором зарегистрирован ПО 2. При необходимости для увеличения энергетического потенциала радиолинии формируют в широкодиапазонном АФУ 17 узкую диаграмму направленности и устанавливают ее в направлении на обслуживающий НК 1 с помощью управляющих сигналов с бортового вычислителя 5, поданных через соответствующие узлы 16.
На каждом НК 1 радиосигнал через одно из НШД АФУ 19 подается на соответствующий НШД РМ 20 и через соответствующий фазовращатель 22 - на НМФУ 23 и вычислитель 24 АРМ, где в соответствии с известными процедурами его демодулируют, дескремблируют, деперемежают, декодируют с коррекцией ошибок, проверяют на наличие не исправленных декодером ошибок и в случае отсутствия ошибок формируют из него пакет, например ISO 8208, предназначенный для передачи по протоколу Х.25 по наземной сети 3 передачи данных получателю информации. При отсутствии радиосигналов на входах НШД АФУ 20 с помощью вычислителя 24 АРМ узлами 21 осуществляют сканирование и автоматический анализ частот выделенных для связи диапазонов частот и выявление таких участков электромагнитного спектра, которые временно менее всего загружены и доступны для организации на них каналов связи. Полученные сведения передают на обслуживаемые ПО 2 и соседние наземные комплексы. Если при сканировании выявлено наличие источника помех, то с помощью вычислителя 24 АРМ и ДНА НШД АФУ 20 известными в радиолокации методами [12, 4, 8] определяют его местоположение, параметры движения и сообщают на обслуживаемые ПО 2 и соседние наземные комплексы. Для упрощения процедуры планирования частот связи, уменьшения влияния помех на достоверность передачи информации осуществляется с помощью вычислителей 24 и 5 решение задачи осведомленности о внешних вторжениях, которая подразумевает оценку различных параметров источника помех, например, по частоте, уровню сигнала, виду модуляции, типу кодирования, времени задержки ответа, направлению приема, угловому перемещению источника информации, местоположению источника информации, длительности сигнала, виду доступа к линии связи, величине доплеровской скорости, информации в сообщении, ожидаемому содержанию ответа, «последней связи» (регистрации) источника информации, ожидаемому времени сеанса связи, скорости передачи данных, адресу абонента, наличию искусственно введенных сообщений, содержанию преамбулы (служебной части сообщения), данным наземных и бортовых средств разведки и радиолокаторов, занимаемой полосе частот спектром сигнала, вызываемому адресу, логике взаимодействия, сравнению принятого сообщения с эталонными из базы данных и другим. По результатам оценки с помощью управляющих воздействий вычислителей 24 (5) осуществляется динамическая перестройка рабочих частот в узлах 21 (16), формирование требуемой формы диаграмм направленности ШД АФУ 20 (17) и/или технологии радиодоступа. Узел 34 хранит данные для выполнения функций вычислителя 33 БЦОС 29.
В бортовом вычислителе 5 (в базах данных БЦОС 34 и АРМ 35) хранится полная информации о собственных вычислительных, аппаратных возможностях и характеристиках всех НК 2 и ПО 2, обслуживаемых системой, текущем состоянии эфира и алгоритмах действий, которые могут выполнять абоненты системы.
Для обеспечения передачи данных по каналу в пределах прямой (оптической) видимости разрабатывают список частотной поддержки радиосвязи, в котором указывают список М наземных комплексов 1 с их адресами, координатами, поддерживаемыми ими режимами работы, например ACARS, VDL-2, VDL-4, VDL-3, наборами разрешенных для каждого НК 1 частот радиосвязи, доводят список частотной поддержки до каждого ПО 2 через наземную систему 3 передачи данных и оборудование системы: узлы 24, 33, 32, 23, 22, 21, 20, эфир, 17, 16, 19, 15, 14, 13, 12, 5, 18 и далее на систему управления ПО 2. Непосредственно на ПО 2 вводят все необходимые данные через вход/выход 36 бортового вычислителя 5 для загрузки.
На ПО 2 начинают анализировать радиосигналы маркеров, находясь на стоянке в зоне аэропорта после включения питания и проведения автоматического встроенного контроля технической исправности. Независимо от функционирования канала связи ПО 2 постоянно поддерживает канал связи в режиме передачи данных с тем НК 1, на той частоте и в том диапазоне, качество канала на которой является наилучшим или приемлемым. Этим обеспечивается выполнение задачи эффективного использования выделенного частотного спектра радиодиапазона.
Во время движения каждым ПО 2 обеспечиваются автоматический выбор рабочей частоты из списка разрешенных частот, случайный и резервированный доступ к каналу связи в режиме множественного доступа с временным разделением, обмен данными с территориально разнесенными наземными комплексами, объединенными с помощью наземной сети 3 передачи данных в единую систему. В случае отсутствия ПО 2 в зоне обслуживания наземного комплекса 1, с помощью формирователя 28 типа ретранслируемых сообщений определяется маршрут доведения соответствующей кодограммы до наземного комплекса 1, на котором отмечался ПО 2 «по последней связи».
При выходе за пределы радиогоризонта или приближении к границе зоны устойчивой радиосвязи НК 1 хотя бы одного из ПО 2 определяется программно один из ПО 2, который назначается первым ретранслятором сообщений. При постоянном изменении дальности между ПО 2 и НК 1 в качестве ретранслятора в течение определенного времени может быть назначен любой из N ПО 2, местоположение которого известно и оптимально по отношению к НК 1 и всем остальным ПО 2. По анализу местоположения и параметров движения остальных ПО 2 в вычислителе 24 АРМ определяются оптимальные пути доставки сообщений к удаленному от НК 1 за радиогоризонт подвижному объекту 2 -получателю сообщения. Сообщение от НК 1 через определенную последовательную цепочку ретрансляторов, состоящую при необходимости из нескольких (от 1 до (N-1)) ПО 2, может быть доставлено к требуемому ПО 2 -получателю. Для этого на НК 1 в формирователе 26 типа ретранслируемых сообщений в заранее определенные разряды передаваемой кодограммы закладываются адрес ПО 2, назначенного первым ретранслятором, при необходимости адреса других подвижных объектов 2 - ретрансляторов, обеспечивающих заданный трафик сообщения и адрес ПО 2 - получателя. Принятые и обработанные на ПО 2 в устройствах 17, 16, 15, 14, 13, 12 сообщения поступают в блок 9 анализа типа сообщений. Если сообщение предназначено для данного ПО 2, то после анализа решается вопрос о направлении данных по двунаправленной шине 18 на систему управления ПО 2 или о передаче сообщения в режиме ретрансляции к соседнему ПО 2. Для исключения коллизий минимизируется число разрядов в передаваемом сообщении и осуществляется ретрансляция данных последовательно во времени. При обмене данными при наличии потенциально конфликтной ситуации экипаж ПО 2 должен полностью выполнять команды оператора НК 1, имеющего больший объем информации о ситуации в своей зоне ответственности. Для этого с НК 1 оператором посылается на ПО 2 соответствующее сообщение, которое отображается на экране бортового блока 8 регистрации данных в виде согласованной отметки и формуляров, в которых могут быть отображены, например, номер рейса или номер борта, высота полета (номер эшелона) или другие характеристики. На основании принятых с НК 1 данных в бортовом вычислителе 5 ПО 2 совместно с наземным вычислителем 24 решается задача наличия опасных сближений с соседними ПО 2 с учетом их прогнозируемых положений и возможных маневров, определяется время следующих сеансов связи с получателями информации. По информации, отображаемой на экране бортового блока 8 регистрации данных, экипажем ПО 2 по согласованию с оператором НК 1 при необходимости определяется направление дальнейшего движения.
Если организовать обмен данными с помощью подвижных объектов-ретрансляторов не удается, то с помощью управляющих воздействий вычислителей 5 и 24 на узлы 14, 15, 16, 19 и 32, 23, 22, 21 соответственно программно с помощью известных технологий осуществляется изменение режимов работы части этих узлов, а также части узлов 17 и 20 для работы в ДКМВ канале или по спутниковой радиолинии связи.
Для каждого ПО 2 тенденции движения соседних подвижных объектов при необходимости могут быть отображены на экране собственного бортового блока 8 регистрации данных, а на экране монитора 27 АРМ - всех ПО 2 в районе действия НК 1 или в заданном секторе с помощью характеризующих предыдущее местоположение ПО 2 отметок, формируемых вычислителями 5 и 24. По мере движения ПО 2 устаревшие отметки стираются. Загрузка в память бортового вычислителя 5 необходимых данных в виде системной таблицы, содержащей списки адресов, координат наземных комплексов и назначенных им частот связи, осуществляются через вход/выход 36 бортового вычислителя 5, например, во время предполетной подготовки каждого подвижного объекта 2.
При передаче с НК 1 приоритетных сообщений для ПО 2 в соответствии с принятыми в системе радиосвязи с подвижными объектами категориями срочности в формирователе 26 типа ретранслируемых сообщений в заголовке сообщения формируется код запрета передачи других сообщений на время, отводимое для трансляции данных с НК 1 на выбранный ПО 2n с учетом времени реакции ПО 2 на принятое сообщение и времени задержки в трактах обработки дискретных сигналов. Принимаемая на ПО 2n информация отображается на экране бортового блока 8 регистрации данных в виде буквенно-цифровых символов или в виде точек и векторов.
Остальные менее приоритетные сообщения в соответствии с протоколом обмена находятся в очереди соответствующей категории срочности. В вычислителях 5 и 24 определяется время «старения» информации, и, если сообщение в течение определенного промежутка времени не было передано в канал связи, оно «стирается», и посылается запрос на повторную передачу сообщения.
При работе НК 1 в режиме прямой радиовидимости (ближней связи), когда не требуется ретрансляция сигналов, осуществляется адресный опрос ПО 2 путем формирования сообщения для передачи в канал радиосвязи в соответствии с протоколом обмена. Набираемое оператором НК 1 (диспетчером) на пульте 28 управления АРМ сообщение отображается на мониторе 27 АРМ и после прохождения сообщения через вычислитель 24 АРМ, наземные узлы 33, 32, 23, 22, 21, 20, бортовые широкодиапазонные антенно-фидерные устройства 17 ПО 2, бортовые широкодиапазонные радиочастотные модули 16, модуль 15 физического уровня, модуль 14 канального уровня вычислительного модуля 11 связи, модуль 13 маршрутизации вычислительного модуля 11 связи, модуль 12 интерфейсов вычислительного модуля 11 связи поступает в бортовой вычислитель 5, где происходит идентификация принятого в сообщении адреса с адресом ПО 2. Далее через модуль 12 интерфейсов сообщение передается в блок 9 анализа типа ретранслируемого сообщения для дешифрации полученного заголовка (служебной части) сообщения и определения режима работы аппаратуры ПО 2. Информационная часть сообщения записывается в память бортового вычислителя 5 и при необходимости выводится на экран блока 8 регистрации данных, который может быть выполнен в виде монитора или другого устройства отображения.
С помощью определенного формата заголовка сообщения с выхода бортового формирователя 10 типа ретранслируемых сообщений может быть задан режим свободного доступа к каналу связи для всех подвижных объектов 2 или режим фиксированного (резервированного) доступа с назначением конкретного временного интервала для организации обмена данными с наземным комплексом 1.
НК 1 гарантирует для каждого зарегистрированного на нем ПО 2 требуемые системные характеристики связи, а именно вероятность своевременной доставки сообщения с заданной достоверностью и интенсивностью потока сообщений, т.е. вероятность того, что средняя задержка передачи сообщения не превысит требуемого порога, например, при достоверности связи не хуже 10-6 и заданной интенсивности потока сообщений с борта ПО 2. Средняя задержка передачи сообщения в зона прямой видимости при надежности канала распространения радиоволн, близкой к 1, обусловлена коллизиями случайного доступа и растет с увеличением вероятности коллизий, а вероятность коллизий растет с ростом количества ПО 2, использующих один, канал связи в режиме случайного множественного доступа, и с ростом интенсивности потока сообщений от каждого ПО 2. Зная точные количественные зависимости указанных параметров для разных режимов обмена данными, НК 1 должен прогнозировать системные характеристики в зависимости от количества зарегистрированных на одном частотном канале ПО 2 и прекращать регистрацию новых ПО 2 (выставлять флаг «занятости» канала связи в сигналах управления), если прогнозируемые системные характеристики деградируют ниже заданного уровня, уменьшая тем самым вероятность коллизий случайного доступа и, следовательно, увеличивая задержку передачи сообщения.
Для того, чтобы минимизировать вероятность коллизий случайного доступа, не создавать помех текущей передаче сообщения подготовленная кодограмма с ПО 2 передается только в том случае, когда радиоканал свободен. Для того, чтобы разнести во времени моменты выхода на связь разных подвижных объектов и НК 1, когда после занятости канала все ПО обнаружили, что радиоканал свободен, в вычислителе 33 БЦОС 29 и в модуле 14 канального уровня ПО 2 формируются псевдослучайные разные задержки времени начала передачи сообщений от подвижных объектов 2 (для каждого своя) и от НК 1.
Если подвижные объекты 3 сформировали для передачи сообщения и обнаружили, что радиоканал свободен, то они информируют остальные подвижные объекты 2 о начале цикла передачи данных, в том числе о своем местоположении, и случайным образом. в выделенных им временных слотах распределяют передаваемые сообщения. В каждом из ПО 2 время окончания сигнала несущей частоты в радиоканале и импульсы синхронизации используются для расчета в модулях 14 и 32 канального уровня интервала времени собственной передачи и внутри этого интервала модули 15 и 23 физического уровня осуществляет передачу собственного пакета данных.
Сообщения о местоположении подвижного объекта и параметрах его движения с выходов приемников 7 и 25 сигналов глобальных навигационных спутниковых систем, например, ГЛОНАСС/GPS, записываются в память вычислителей 5 и 24 с привязкой к глобальному времени [12, 4, 13]. Точная синхронизация слотов, используемых для обмена данными между абонентами системы, и их запланированное использование для передачи известно каждому пользователю по отношению к окружающим пользователям с известными координатами. Чем дальше находится ПО 2 от аэродрома или от зоны интенсивного движения, тем меньше времени ему отводится для передачи данных. Такая информация позволяет каждому НК 1 организовать высокоэффективное использование диапазонов частот, выделенных для связи.
При работе в некоторых режимах ПО 2 ведут независимую трансляцию на этих каналах с одним и тем же периодом и сдвигом посылок в одном канале относительно другого с тем, чтобы обеспечить равномерность получения информации по каналам одновременно. Совместная обработка принятых сообщений одинакового назначения, например, по критерию максимального правдоподобия, позволит повысить достоверность передачи сообщений [3]. Такая возможность на борту появляется с установкой широкодиапазонных АФУ 17, ШД РМ 16, МФУ 15, МКУ14 и в НК 1 узлов 20, 21, 22, 23, 25-28, 32, 33, 34 и 35.
В вычислителях 5 и 24 данные ПО 2 используются для расчета навигационных характеристик и параметров движения каждого подвижного объекта. В зависимости от выбранного интервала времени выдачи на НК 1 сообщений о местоположении ПО 2 в вычислителе 5 в заданное время формируется соответствующее сообщение с привязкой к глобальному времени проведения измерения координат ПО 2. Это время используется в вычислителе 24 НК 1 для известной операции построения экстраполяционных отметок от ПО 2 [12].
Синхронизация работы всех узлов системы осуществляется на основе использования всеми абонентами участниками движения единого глобального всемирного координированного времени (UTC), получаемого от существующих объектов глобальной навигационной спутниковой системы.
Для взаимодействия наземных комплексов 1, пользователей и ПО 2 используется наземная сеть 4 передачи данных. Она может быть реализована различными известными способами, например, при межсетевой работе НК 1 через центры коммутации пакетов в соответствии с протоколом Х.25 [4]. Соединения между НК 1 и центрами коммутации пакетов Х.25 (маршрутизаторами) могут обеспечиваться через специально выделенные или арендуемые каналы связи. Они позволят транслировать сообщение, адресованное пользователем определенному ПО 2 на тот наземный комплекс 1, на котором данный ПО 2 «зарегистрирован», и где в данный момент времени обеспечиваются оптимальные условия приема. Система радиосвязи с ПО 2 работает в автоматическом режиме без вмешательства оператора на выбранных вероятностно-оптимальных частотах из списка частот, назначенного при планировании связи.
На момент подачи заявки разработаны алгоритмы функционирования. Узлы 3, 5-17, 20-21, 24 -28 одинаковые с прототипом.
Вводимые узлы 23 и 32 аналогичны одноименным бортовым устройствам 15 и 14, узлы 33 и 34 могут быть выполнены на плате процессорной 5066-586-133MHZ-1MB, 2 MB Flash CPU Card фирмы Octagon Systems, узел 35 - на дополнительных модулях к ЭВМ типа «Багет-01-07» ЮКСУ.466225.001, узлы 19 и 22 - на серийно выпускаемых фазовращателях, например, в микрополосковом исполнении.
Основное преимущество использования введенных на НК 1 устройств 22, 23, 32-35 и на ПО 19 состоит в постоянной оценке уровня загрузки выделенных диапазонов частот, управлении динамическим доступом к спектральным радиочастотным ресурсам, используемым формам радиосигналов и изменениям положения в пространстве диаграмм направленности антенн. При точном выполнении принятой в изобретении стратегии управления в динамическом режиме можно использовать незанятые каналы и автоматически переключать рабочие частоты, оптимизируя сетевую топологию системы на основе данных по источникам помех, местоположению ПО и НК, требуемой пропускной способности и интенсивности трафика, обеспечить высший уровень конфигурируемости и гибкости, предоставляемый архитектурой и вычислительными средствами. Высший уровень конфигурируемости, реализуемый в предлагаемом оборудовании ПО 2 и НК 1 - это полностью гибкие виды модуляции, протоколы уровня линии, сети и пользовательские функции, возможность изменения ширины полосы сигнала и центральной частоты по программе в широких пределах [14]. Благодаря заявленной системе появляется возможность создания интеллектуальной широкодиапазонной программируемой (с помощью вычислителя 5, 24 и соответствующих модулей) системы радиосвязи с широкодиапазонными радиочастотными модулями 16 и 21 и широкодиапазонным АФУ 17 и 20, выполненными, например, на широкодиапазонных адаптивных антенных решетках [15, 16]. Модули 15 и 23 физического уровня содержат высокоскоростные, с большим динамическим диапазоном АЦП и ЦАП, и базируются на высокопроизводительных сигнальных процессорах, которые в цифровом виде реализуют большинство функций физического уровня, а именно, операции частотного преобразования, фильтрации, синтеза частот, приемо-возбудителя связи и предназначены для формирования и обработки радиосигналов на физическом уровне (кодирования/декодирования, перемежения/деперемежения, скремблирования/дескремблирования данных, модуляции/демодуляции, реализации адаптивных методов передачи и приема сигналов, полосовой фильтрации, преобразования частоты и т.п.). Модули 14 и 32 канального уровня обеспечивают протоколы обмена данными уровня линии и доступа к подсети «воздух-земля», обмена с модулем 13 маршрутизации ПО 2 и вычислителем 33 БЦОС 29, поддержку отказоустойчивого режима работы и другие функции. Модуль 13 маршрутизации обеспечивает маршрутизацию принятых сообщений «воздух-земля», например, в виде пакетов ISO 8208 к получателям на борту. Модуль 12 интерфейсов обеспечивает все необходимые интерфейсы с бортовым оборудованием.
Вычислительный модуль связи 11, входящий в состав ПО 2, обеспечивает функциональное взаимодействие с бортовыми устройствами 5, 7, 8, 9, 10 и 15 и датчиками 6 событий.
Наземный блок 29 цифровой обработки сигналов выполняет функции входящих в его состав узлов: 32, 33, 34 и обеспечивает взаимодействие с устройствами: 21, 22, 23, 25-28.
Модули 14 и 32 канального уровня предназначены для упаковки, распаковки сообщений, управления доступом к каналу, выбора частоты, дополнительного кодирования/декодирования избыточным циклическим кодом для обнаружения ошибок, не исправленных на физическом уровне, автоматического запроса повторения, криптозащиты на канальном уровне и т.п. Он реализуется, например, на плате процессорной 5066-586-133MHz-1 MB, 2 MB Flash CPU Card фирмы Octagon Systems.
Модуль 13 маршрутизатора взаимодействует с модулем 14 канального уровня на уровне доступа к подсети, например, по протоколу ISO 8208 (в среде ATN) в соответствии с заданными режимами передачи данных и может быть реализован на универсальном вычислителе типа платы процессорной 5066-586-133MHz-1MB, 2 MB Flash CPU Card фирмы Octagon Systems.
Модуль 12 интерфейса обеспечивает взаимодействие вычислительного модуля 11 связи с бортовой авионикой (устройствами 5, 6, 7, 8, 9, 10) по разным стыкам, например, дискретный сигнал по протоколам ARINC 429, ARINC 664 и ARINC 646, разовые команды и т.п. Он может быть выполнен, например, на коммутаторе AFDX [17].
Модули 15 и 23 физического уровня обеспечивают параллельную обработку сигналов в реальном масштабе времени одновременно нескольких каналов связи, организованных в выделенных диапазонах с выходов широкодиапазонных радиочастотных блоков 16 и 21, прошедших соответствующие фазовращатели 19 и 22. Причем при неисправности одного из модулей 16, соединенного с бортовым широкодиапазонным антенно-фидерным устройством 17 (или узлов 21 и 20), программно подключается взамен вышедшего из строя модуля 16 (21) другой исправный модуль 16 (21) с помощью соответствующего модуля 14 или 32 канального уровня. В этом случае все функции обработки и формирования сигнала соответствующего радиоканала связи, преобразования данных и закрытия информации (при необходимости) будут выполнены программным способом в виде законченных программных модулей. Взаимодействие программных модулей будет осуществляться по заранее определенным правилам взаимодействия (протоколам и процедурам взаимодействия, входным и выходным данным), что обеспечит их оперативное изменение (замена программного кода), при необходимости, в процессе движения ПО 2. Это обеспечивает формирование и обработку любого сигнала и данных, закрытие информации, интерфейс с внешним оборудованием по различным алгоритмам и стандартам даже в том случае, когда ПО 2 находится на границах 2 зон ответственности НК 1, в которых для обмена данными между НК 1 и ПО 2 используются различные режимы линии передачи данных и диапазоны частот. Таким образом, на уровне каналов связи (физический, канальный уровни, включая криптозащиту канала, доступа к подсети) модуль 16 на ПО 2 (21 на НК 1), соединенный с бортовым ШД АФУ 17 (20), совместно с модулем 15 (23) физического уровня и модулем 14 (32) канального уровня обеспечивают совместимость с различными системами связи (линиями передачи данных «воздух-земля»), работающими в разных диапазонах частот. Вычислители 24 и 5 осуществляют управление аналоговыми высокочастотными узлами из состава модулей 21 и 16 соответственно (устанавливает частоту передачи, ширину полосы и т.д.), а также обеспечивают соответствие конфигурации системы текущим требованиям пользователя: формирования алгоритмов функционирования системы в зависимости от изменения состояния эфира, наличия помех, пространственных, временных координат и используемых программных приложений.
Модули 15 и 23 строятся на быстродействующих сигнальных процессорах, которые включает в себя, например:
- интерфейсы и шлюзы (ввода-вывода и преобразования данных) на базе, например матрицы шлюзов, программируемых полями (FPGA (Field Programmable Gate Array)) по технологии PCI (VME);
- сигнальные процессоры, например типа DSP ADSP-21060 (фирмы Analog Devices), программируемых логических интегральных схем (ПЛИС) EPF10K50 (фирмы Altera), контроллеров AVR ATmega16 (фирмы Atmel) для контроля и управления процессом обработки (для модемов-кодеков, фильтров);
- универсальный вычислительный процессор, реализующий протоколы обмена данными «воздух-земля», обнаружение и изоляцию неисправностей внутри модуля 15 или 23, реконфигурацию модуля 15 или 23.
Таким образом, оборудование ПО 2 и НК 1 выполняет функции каналообразования, аппаратуры передачи данных (кодека, модема, контроллера протоколов канального уровня) с программной реализацией режимов работы аппаратуры (видов модуляции, кодирования, протоколов обмена) с возможностью введения новых режимов работы программным способом через внешний интерфейс (шины 18 и 4, вход/выход 36). Оборудование системы представляет собой конструктивное и функциональное объединение с максимальным использованием цифровой обработки сигналов отдельных устройств, выполняющих функции фильтрации, частотного преобразования, усиления, формирования и обработки сигналов (кодирования, декодирования, модуляции, демодуляции, выбора частоты и т.д.), управления протоколами обмена данными «воздух-земля», менеджмента связью (маршрутизации сообщений), обмена данными с авионикой борта, например, отстройки от источника помех [14, 15], слежения за технической исправностью не только для обнаружения отказов, но и для изоляции отказов и реконфигурации аппаратуры для обеспечения отказоустойчивой работы. Эта способность позволяет повысить аппаратурную надежность оборудования, т.е. вероятность работы оборудования без отказов во время полета, без внеурочного обслуживания (только регламентное обслуживание по расписанию) с заменой отказавших модулей. Резервирование ресурсов будет обеспечено программно на уровне модулей.
Заявляемое изобретение имеет следующие преимущества:
- система обладает структурной, временной, пространственной и функционально сетевой избыточностью за счет взаимоувязанных процессов: интеллектуального управления, оптимального на данный момент времени распределения ресурсов, прогнозирования действий источника помех и нахождения оптимального решения;
- непрерывный автоматический анализ радиоэфира позволяет выявить участки электромагнитного спектра, которые временно менее всего загружены и осуществить динамическую перестройку рабочих частот, формы диаграмм направленности антенн и технологии радиодоступа;
- информация о собственных вычислительных (программных), аппаратных возможностях и характеристиках других абонентов, текущем состоянии эфира и алгоритме действий, которые могут выполнять абоненты системы позволяют обеспечить "гибкое" программируемое изменение конфигурации;
- организации единой синхронизации в радиосети, наличие базы данных о текущих характеристиках абонентов системы с входом для текущего обновления массивов и построение аппаратуры на принципах программного выполнения основных функций упрощает обмен данными между абонентами системы;
- повышается аппаратурная (эксплуатационная) надежность наземного оборудования и системы в целом;
- повышается надежность связи за счет использования одновременно различных режимов линии передачи данных в разных диапазонах, программного выбора требуемого режима работы бортового и наземного широкодиапазонного оборудования.
Литература
1. Патент РФ (полезная модель) №68 213 U1. М. Кл. Н04В 7/26.
2. Патент РФ (полезная модель) №68 211 U1, М. Кл. Н04В 7/26.
3. Патент РФ (полезная модель) №115 593 U1, М. Кл. Н04В 7/26. (прототип).
4. Б.И. Кузьмин «Сети и системы цифровой электросвязи», часть 1 «Концепция» ИКАО CNS/ATM. Москва Санкт-Петербург: ОАО «НИИЭР», 1999, 206 с.
5. Руководство по ВЧ-линии передачи данных (Doc9741 - AN/962). Издание первое. - ICAO, 2000, 148 с.
6. ARINC 753-3. Система ДКМВ передачи данных HFDL. 2001.
7. ARINC 635-3. Протоколы ДКМВ передачи данных HFDL. 2001.
8. Автоматизированные системы управления воздушным движением: Новые информационные технологии в авиации: Учеб. Пособие / P.M. Ахмедов, А.А. Бибутов, А.В. Васильев и др.; под ред. С.Г. Пятко и А.И. Красова. - СПб.: Политехника, 2004.
9. RTCA/DO-265. Стандарты минимальных требований к эксплуатационным характеристикам (MOPS) для авиационной мобильной высокочастотной линии данных (HFDL). 2000.
10. Приложение 10 к соглашениям ИКАО. Том 3. Часть 1. Глава 6. ОВЧ линия цифровой связи (VDL) «Воздух-Земля».
11. Приложение 10 к соглашениям ИКАО. Том 3. Часть 1. Глава 11. ВЧ линия передачи данных (HFDL).
12. Д.С. Конторов, Ю.С. Голубев-Новожилов. Введение в радиолокационную системотехнику. - М.; Сов. Радио, 1971, 367 с.
13. GPS - глобальная система позиционирования. - М.: ПРИН, 1994, 76 с.
14. RTCA/DO-297. Руководство по разработке ИМА и рассмотрение ее сертификации. 2005.
15. Shekh К., Gesbert D., Gore D., Paulraj A. Smart antennas for broadband wireless access networks //EEE Communication Magazine. Nov. 1999.
16. Елена Строганова. Доцент МТУСИ, к.т.н., эксперт ИЦ МТУСИ.
17. ARINC 664. Бортовая сеть передачи данных. В 7-ми частях. 2005.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2518014C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2516868C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2014 |
|
RU2557801C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2022 |
|
RU2793106C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ С ПРИМЕНЕНИЕМ РАДИОФОТОННЫХ ЭЛЕМЕНТОВ | 2018 |
|
RU2686456C1 |
| КОМПЛЕКС БОРТОВЫХ СРЕДСТВ ЦИФРОВОЙ СВЯЗИ | 2021 |
|
RU2771858C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2516704C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2572521C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2018 |
|
RU2688199C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2505929C1 |
Изобретение относится к радиотехнике и может использоваться в системах обмена данными подвижных объектов (ПО), наземных комплексов (НК) и абонентов системы. Технический результат состоит в расширении функциональных возможностей системы за счет ускорения процедуры решения задач планирования частот связи, эффективного использования выделенного частотного спектра радиодиапазона и уменьшения влияния помех на достоверность передачи информации из-за осведомленности о внешних вторжениях. Для этого в ПО введены фазовращатели, соединенные соответствующими связями с бортовым вычислителем, а в НК - фазовращатели, соединенные с соответствующими входами/выходами вычислителя АРМ, с входами/выходами бортового модуля физического уровня (МФУ) и входами/выходами бортовых широкодиапазонных радиочастотных модулей, управляющие входы/выходы МФУ и модуля канального уровня подключены двухсторонними связями к соответствующим входам/выходам бортового вычислителя. 3 ил.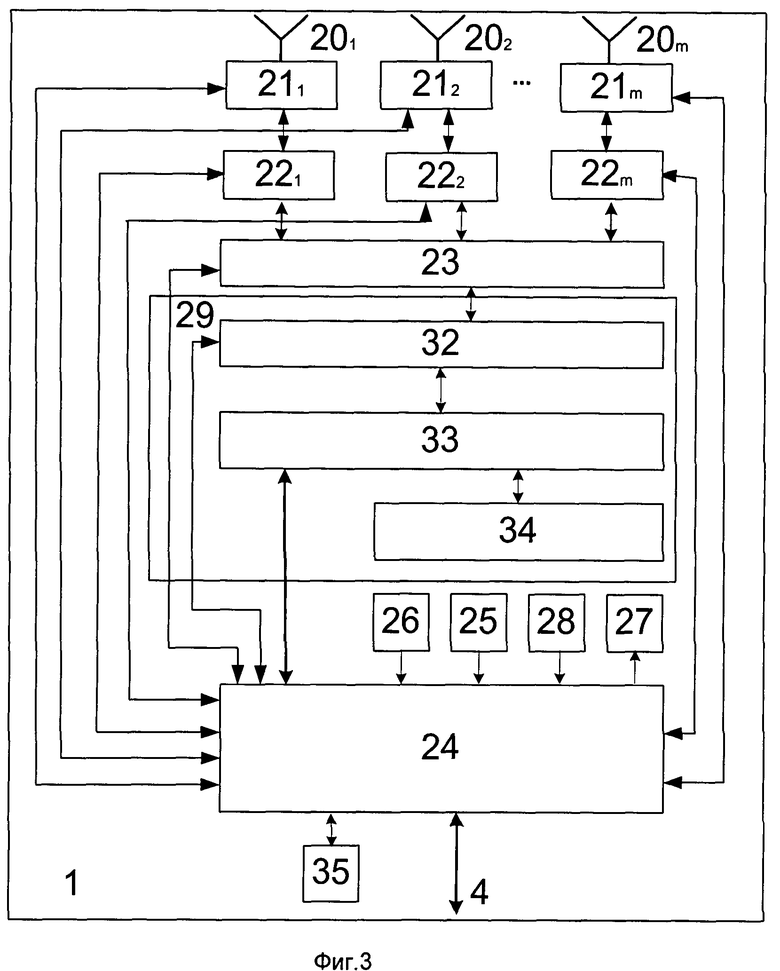
Система радиосвязи с подвижными объектами (ПО), имеющая в своем составе М территориально разнесенных наземных комплексов связи и N подвижных объектов, связанных между собой каналами связи «воздух-воздух», а также связанных с помощью каналов радиосвязи «воздух-земля» с М наземными комплексами, которые соединены между собой и с внешними абонентами через наземную сеть передачи данных с входом/выходом системы, каждый подвижный объект содержит К бортовых широкодиапазонных антенно-фидерных устройств, подключенных двухсторонними связями к соответствующим входам/выходам К бортовых широкодиапазонных радиочастотных модулей, бортовой модуль физического уровня (МФУ), соединенный двухсторонними связями с модулем канального уровня (МКУ) вычислительного модуля связи, состоящего из последовательно соединенных двунаправленными интерфейсами модуля канального уровня, модуля маршрутизатора и модуля интерфейса, входы модуля интерфейса подключены к бортовым датчикам, приемнику глобальной навигационной спутниковой системы, бортовому формирователю типа ретранслируемых сообщений, выход модуля интерфейса подключен к блоку регистрации данных, второй вход/выход модуля интерфейса подключен к бортовому анализатору типа принимаемых сообщений, третий вход/выход - к бортовому вычислителю, связанному с помощью двунаправленного интерфейса с бортовой системой управления подвижным объектом, а каждый наземный комплекс связи содержит m наземных широкодиапазонных антенно-фидерных устройств, подключенных двухсторонними связями к входам/выходам m наземных широкодиапазонных радиочастотных модулей, блок цифровой обработки сигналов (БЦОС), связанный двунаправленным интерфейсом с вычислителем автоматизированного рабочего места (АРМ), второй вход/выход которого подключен к входу/выходу наземной сети передачи данных с входом/выходом системы, первый вход вычислителя АРМ подключен к приемнику сигналов глобальных навигационных спутниковых систем, второй вход - к наземному формирователю типа ретранслируемых сообщений, третий вход - к пульту управления АРМ, а выход - к монитору АРМ, отличающаяся тем, что в каждый наземный комплекс дополнительно введены m фазовращателей, подключенных двухсторонними связями к соответствующим m входам/выходам наземного модуля физического уровня (НМФУ) и к соответствующим входам/выходам m наземных широкодиапазонных радиочастотных модулей, а управляющие входы/выходы m фазовращателей - к соответствующим m входам/выходам вычислителя АРМ, НМФУ через последовательно соединенные двухсторонними связями и расположенные в БЦОС наземный модуль канального уровня (НМКУ) блока цифровой обработки сигналов, вычислитель БЦОС подключен двухсторонними связями к вычислителю АРМ, а также к базе данных БЦОС, база данных АРМ двухсторонними связями подключена к соответствующему входу/выходу вычислителя АРМ, а управляющие входы/выходы m наземных широкодиапазонных радиочастотных модулей, НМФУ и НМКУ соединены с соответствующими входами/выходами вычислителя АРМ, в каждый ПО дополнительно введены К фазовращателей, подключенных двухсторонними связями к соответствующим К входам/выходам бортового модуля физического уровня (МФУ) и к соответствующим входам/выходам К бортовых широкодиапазонных радиочастотных модулей, а управляющие входы/выходы фазовращателей - к соответствующим К входам/выходам бортового вычислителя, управляющие входы/выходы К бортовых широкодиапазонных радиочастотных модулей, МФУ и МКУ подключены двухсторонними связями к соответствующим входам/выходам бортового вычислителя, бортовой вычислитель имеет вход/выход для загрузки соответствующих данных.
| Тихоходный электродвигатель | 1944 |
|
SU68211A1 |
| Электроконтактное приспособление к абразивно-доводочным станкам для автоматического контроля отверстий в процессе обработки | 1951 |
|
SU94101A1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2309543C2 |
| US5669062 A 16.09.1997 | |||

