ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к диагностическим системам для железнодорожных инфраструктур, в частности к системам для детекции и мониторинга линейных инфраструктур, таких как цепные линии и опорные столбы цепной линии, а также профиль балласта.
УРОВЕНЬ ТЕХНИКИ
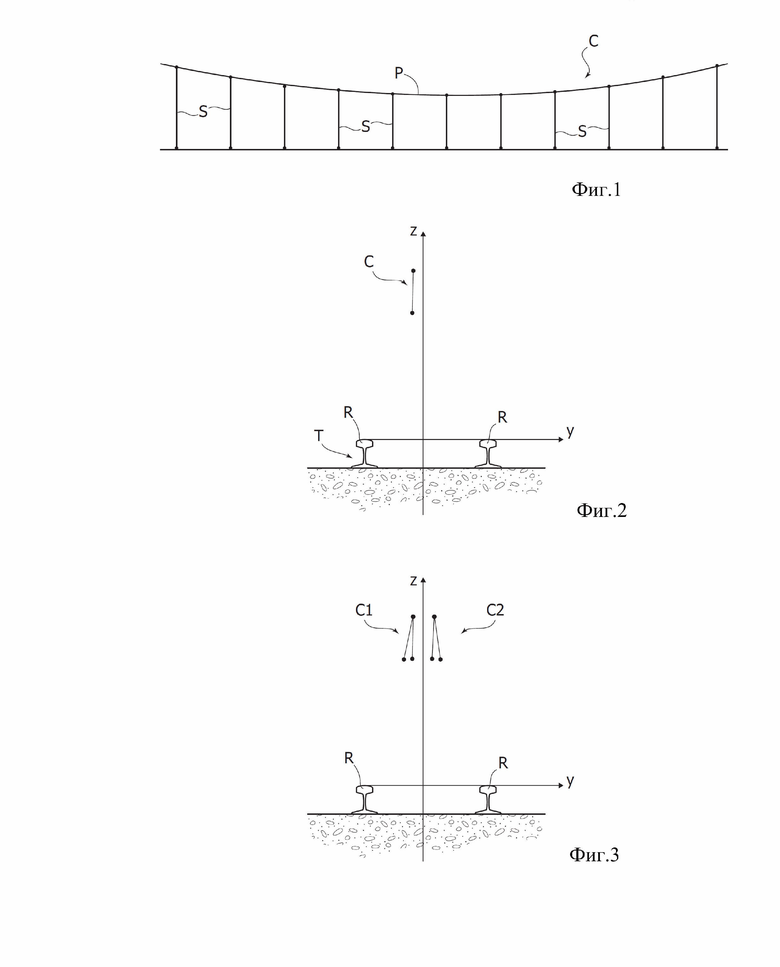
В железнодорожных инфраструктурах определение положения контактного провода и грузонесущего кабеля воздушной силовой линии по отношению к рельсовому пути важно для обеспечения того, чтобы они находились в правильном положении по отношению к контакту с контактным башмаком пантографа железнодорожного подвижного состава. На самом деле, неверная геометрическая форма контактов может привести к тому, что пантограф случайно зацепится за провода, что, скорее всего, приведет к разрушению обоих. Как показано на фиг. 1, воздушная силовая линия С включает в себя грузонесущий кабель или цепную линию Р, на которой контактный провод L подвешен посредством множества подвесов S. Контактный провод L может быть одиночным, как, например, в случае поперечного сечения с фиг. 2 или двойным, как в случае поперечного сечения с фиг. 3. При этом если Z обозначает вертикальную ось, центрированную посередине уклона пути, воздушная линия С может быть расположена в положении, более или менее смещенном относительно оси Z, что означает либо тот факт, что она может быть установлена на расстоянии от средней линии только на одной стороне от самой средней линии или тот факт, что она проходит с одной стороны на другую сторону средней линии.
В настоящее время существуют инструменты для измерения положения контактного провода L и грузонесущего кабеля Р относительно пути, которые основаны на контактной системе. Это контактные датчики, обычно добавляемые к пантографу диагностического транспортного средства для измерения высоты контактного провода L и в некоторых случаях его бокового положения относительно середины пути, которое может изменяться в зависимости от прохождения воздушной линии в плоскости рельсов (ось Y), или же в зависимости от наличия переключателей или пересечений, или просто в результате компенсации теплового расширения посредством натяжных грузов или по любой другой причине.
Кроме того, еще один недостаток, хотя и частичный, заключается в том, что этот инструмент может измерять положение воздушной линии только в рабочих условиях, когда провод L смещен относительно положения покоя из-за взаимодействия с пантографом.
Разумеется, измерение положения в рабочих условиях представляет некоторый интерес для целей диагностики, однако именно положение покоя более интересно, поскольку именно последнее позволяет проводить прогностическую деятельность в отношении возможных недостатков во время движения железнодорожного транспорта.
Кроме того, существует множество бесконтактных измерительных инструментов, предназначенных для измерения положения одного или более проводов L в зависимости от их типа. Когда эти инструменты установлены вблизи пантографа, они могут измерять как положение под давлением пантографа (т.е. с поднятым пантографом), так и статическое положение или положение покоя (т.е. с опущенным пантографом). Это инструменты преимущественно оптического типа, основанные на ротационных сканерах (LIDAR) или оптической триангуляции различных типов.
Несмотря на то, что они достаточно точны и потенциально способны выполнять мониторинг воздушных линий не строго в рабочих условиях, основным недостатком, которым страдают эти инструменты, является загрязнение. Поскольку это оптические приборы, они нуждаются в прозрачных или, во всяком случае, рефракционных окнах, через которые собственно и производится измерение. Поскольку эти окна в любом случае находятся на участках железнодорожного транспорта, на которые воздействуют суровые погодные условия, они подвержены чрезвычайно быстрому ухудшению рабочих характеристик из-за загрязнения атмосферными агентами и/или загрязнения в результате накопления материала, отделяющегося от движущегося железнодорожного транспорта, такого как жир, грязь и жидкости.
Также детекция поперечного профиля балласта на уклоне является важным аспектом, хотя и относительно независимым от того, что было изложено выше. Балласт - это слой щебня, который удерживает шпалы и, следовательно, путь, прикрепленными к грунту. Высота балласта по отношению к шпалам является весьма критическим параметром: она должна быть достаточной, чтобы удерживать путь на грунте, но не чрезмерной, как для того, чтобы не тратить материал, так и для предотвращения повреждения поезда или инфраструктуры камнями, поднятыми при перемещении воздуха из-за прохождения поезда.
Также для определения профиля балласта в настоящее время используются оптические инструменты, которые имеют те же проблемы, что указано выше.
ЗАДАЧА ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является решение вышеупомянутых технических проблем. В частности, задача настоящего изобретения состоит в создании системы для детекции положения линейных инфраструктур, таких как воздушные линии, опорные столбы и профиль балласта, обеспечивающей возможность работы, по существу нечувствительной к загрязнению атмосферными агентами или загрязнению из-за движения самого транспорта.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Задача настоящего изобретения решается системой, железнодорожным транспортным средством и способом, имеющими совокупность признаков, изложенную в прилагаемой формуле изобретения, составляющей неотъемлемую часть сведений технического характера, раскрытых в материалах заявки в отношении изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изобретение описано ниже со ссылкой на прилагаемые чертежи, которые представлены исключительно в качестве неограничивающего примера и на которых:
- фиг. 1-3, которые уже были описаны, иллюстрируют воздушную силовую линию и два ее характерных поперечных сечения, соответственно;
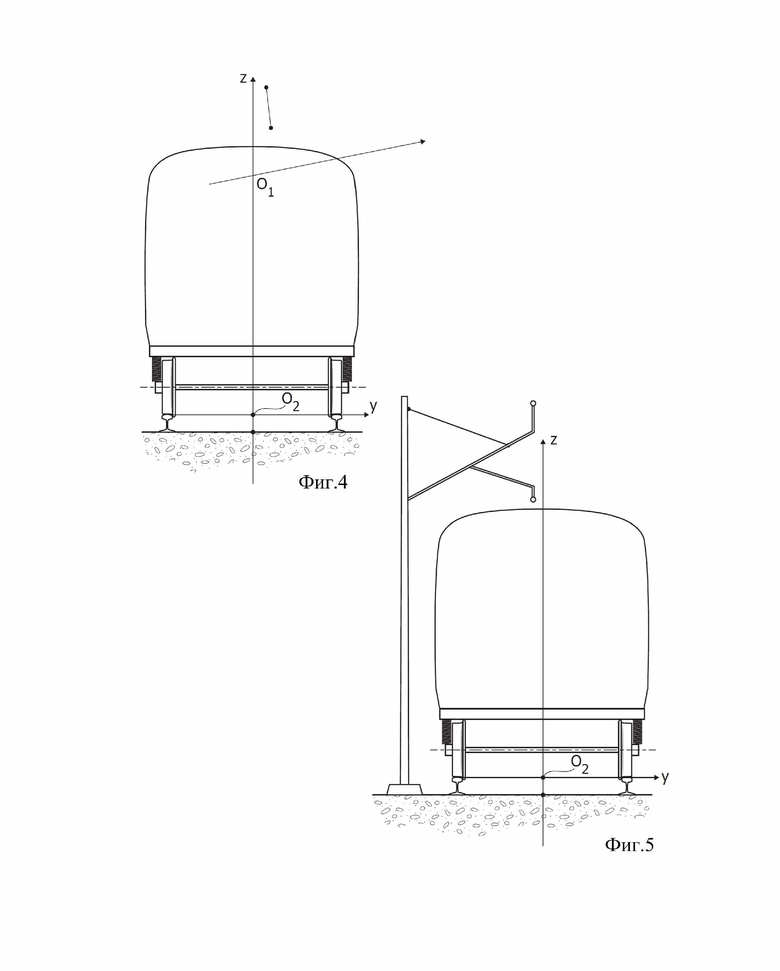
- фиг. 4 и 5 иллюстрируют условия, приведенные на примере смещения линейных инфраструктур относительно середины плоскости рельсов;
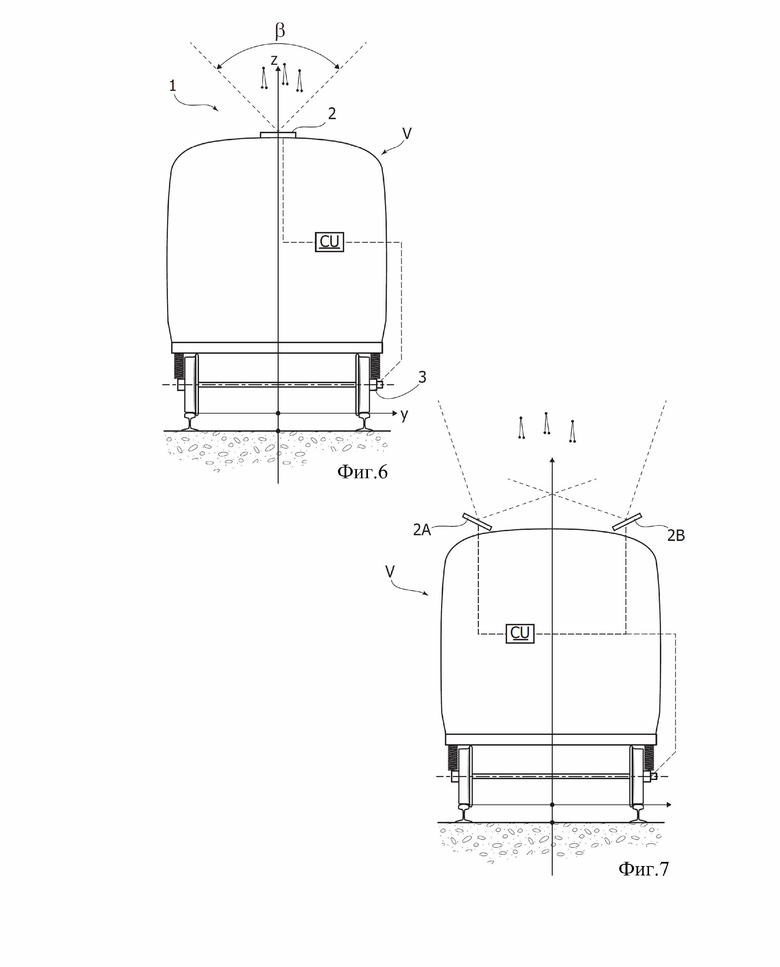
- фиг. 6 и 7 иллюстрируют два варианта осуществления измерительной системы в соответствии с изобретением;
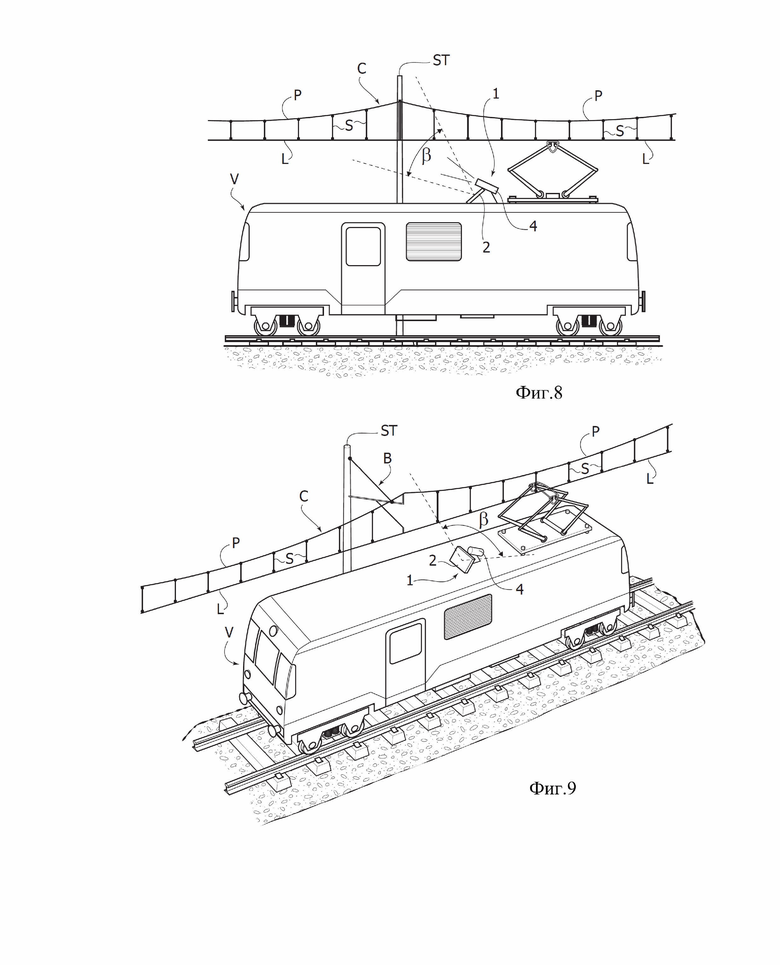
- фиг. 8 и 9 представляют собой два вида (вид сбоку и вид в перспективе, соответственно) другого варианта осуществления измерительной системы согласно изобретению;
- фиг. 10 и 11 иллюстрируют вид в перспективе и вид сверху, соответственно, другого варианта осуществления системы согласно изобретению;
- фиг. 12 и 13 иллюстрируют еще один вариант осуществления изобретения; и
- фиг. 14 иллюстрирует еще один вариант осуществления изобретения, приспособленный, в частности, для детекции профиля балласта на уклоне.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
На фиг. 6 и 7 позицией 1 обозначена система детекции для железнодорожных инфраструктур в соответствии с различными вариантами осуществления изобретения. Система 1 детекции содержит по меньшей мере одно устройство 2 детекции электромагнитных волн, которое, в свою очередь, содержит по меньшей мере одну приемопередающую антенну.
В некоторых вариантах осуществления, таких как проиллюстрированный на фиг. 7, система детекции может содержать два устройства детекции электромагнитных волн, обозначенных ссылочными номерами 2А, 2В. По меньшей мере одна приемопередающая антенна каждого устройства 2, 2А, 2В приспособлена для излучения электромагнитных волн в направлении линейной инфраструктуры и для приема электромагнитных волн, отраженных линейной инфраструктурой.
Систему 1 удобно устанавливать на крыше железнодорожного транспорта, однако - в зависимости от линии инфраструктуры, которая подлежит детекции, - возможны и другие местоположения.
В предпочтительном варианте осуществления устройство 2 детекции содержит радар, относящийся к так называемому типу с фазированной решеткой, включающий в себя множество приемопередающих антенн, питаемых последовательно, с предварительно установленной фазовой задержкой, так что общий волновой фронт может охватывать угол β амплитуды, достаточный для покрытия диапазона изменений положений воздушной линии С, представляющего интерес для конкретного типа применения.
В радаре с фазированной решеткой подача на решетку приемопередающих антенн сигналов, имеющих заранее установленную разность фаз, генерирует волновой фронт с известным угловым сдвигом фазы относительно оси самого радара. Это означает, что, изменяя фазовый сдвиг во времени, можно изменять угол β, определяя в результате рабочий диапазон устройства 2.
Система 1 дополнительно содержит электронный блок управления CU, который приспособлен для приема сигнала, представляющего электромагнитную волну, отраженную и перехваченную приемопередающими антеннами устройства 2, и для определения положения линейной инфраструктуры по отношению к заданной системе отсчета. В общем случае электронный блок управления CU принимает совокупность сигналов, которые содержат информацию, касающуюся излучаемых электромагнитных волн и отраженных электромагнитных волн. Учитывая, что обработка данных сигнала относительно отраженных электромагнитных волн является особенно сложной, обработка выполняется с помощью специализированных вычислительных блоков (таких как DSP+RISC CPU и, возможно, FPGA).
Как можно видеть на фиг. 6 и 7, а также на следующих фигурах 8 и 11, система 1 приспособлена для применения на борту железнодорожного транспортного средства V, которое может быть либо диагностическим транспортным средством, либо полностью обычным пассажирским или грузовым железнодорожным транспортным средством, таким как пассажирский вагон, высокоскоростной поезд, товарный вагон, локомотив или же железнодорожная дрезина, управляемая человеком (например, ручная дрезина или автодрезина). При установке на борт железнодорожного транспортного средства, система 1, кроме того, приспособлена для взаимодействия с датчиком 3 (или вообще любым датчиком углового положения), подключенным к колесной паре тележки железнодорожного транспортного средства (например, интегрированным в положении, соответствующем буксе тележки), что обеспечивает синхронизацию данных, детектируемых устройством 2, с движением транспортного средства вдоль плоскости рельсов.
В частности, каждый сбор данных устройством 2 запускается импульсом, который также вызывает считывание счетчика импульсов кодировщика 3. Таким образом, можно обеспечить измерение с эталонным пробегом на участке пути, по которому движется транспортное средство V, и, кроме того, можно измерить расстояние, пройденное самим транспортным средством V.
Считывание устройством 2 происходит чрезвычайно быстро, и устройство 2 способно эффективно работать до скорости порядка 300 км/ч.
Как показано на фиг. 6, система 1 в соответствии с изобретением, в которой имеется одиночное устройство 2 детекции, может использоваться всякий раз, когда необходимо измерять ничего, кроме положения одного или более контактных проводов L воздушной линии С. Решение с фиг. 7, напротив, предпочтительно, когда требуется измерить также и цепную линую кабеля Р, который может быть скрыт контактным проводом L, если система 1 находится точно под ним.
В случае, когда участок пути имеет какую-либо характеристику геометрической неоднородности или сингулярности или для предотвращения частичной или неполной детекции из-за того, что грузонесущий кабель Р воздушной линии может быть замаскирован проводом L, или опять же из-за того, что при использовании двойного провода L один из двух проводов может быть замаскирован другим - опять же с учетом установки системы 1 на крыше железнодорожного подвижного состава - система 1 более удобно построена как представлено на фиг. 7, то есть, по меньшей мере с двумя устройствами 2А, 2В детекции электромагнитных волн (предпочтительно, радарами с фазированной решеткой), расположенными на противоположных сторонах транспортного средства V и имеющими взаимно инцидентные оси. Таким образом, любой объект, который замаскирован для одного из двух радаров 2А, 2В, не будет замаскирован для другого.
Однако в этих вариантах осуществления системы 1 возникает необходимость улавливать отраженные эхо-сигналы каждого радара 2А, 2В, чтобы предотвратить события ложного распознавания.
Первое решение состоит в подаче на радары 2А, 2В сигналов, имеющих разные частоты, так, чтобы фильтровать сигналы, соответствующие отраженным электромагнитным волнам, с помощью фильтров, чувствительных к частотам, тем самым легко отличая эхо-сигналы радара 2А от эхо-сигналов радара 2В.
Вторая возможность состоит в управлении радарами 2А, 2В (и любыми другими радарами 2, которые могут составлять инструмент 1) посредством так называемого метода разделения времени, т.е. присвоения каждому радару 2А, 2В окна работы в заданном интервале времени, чтобы иметь взаимно однозначное соответствие между конкретным моментом времени и испускаемыми и отраженными электромагнитными волнами. Другими словами, в этом случае есть уверенность, что в данный момент работает один и только один радар из решетки системы 1, в соответствии с последовательностью активации радара.
В других вариантах осуществления можно управлять радарами 2А, 2В и другими возможными радарами системы 1 так, чтобы два метода управления - с переменной частотой и временным разделением - объединялись друг с другом.
Как показано на фиг. 8, в другом варианте осуществления изобретения система 1 приспособлена, в частности, для измерения положения и детекции геометрической формы кронштейнов, несущих воздушную линию С. Кронштейны обозначены позицией В и в общем случае содержат раму, установленную консольно по отношению к опорному столбу ST, к которому прикреплен грузонесущий кабель или цепная линия Р. В этом случае, в дополнение к одному или более устройств 2 детекции электромагнитных волн, опять же предпочтительно расположенным на крыше железнодорожного транспортного средства, система 1 предпочтительно содержит одно или более устройств 4 получения изображения, приспособленных для определения рамок соответствующей линейной инфраструктуры (кронштейн В) и для предоставления, посредством известных алгоритмов обработки изображений, указания геометрической формы самого кронштейна В и - в сочетании с данными, полученными посредством устройства 2, - указания его положения относительно плоскости рельсов (высота в направлении Z относительно оси Y/плоскости XY, при этом ось Z перпендикулярна плоскости XY). Комбинация устройства 2 с устройствами 4 получения изображения важна, поскольку устройство 2 предоставляет внутренне откалиброванные геометрические размеры, тогда как размеры на изображении меняются в зависимости от расстояния, оптики и угла обзора.
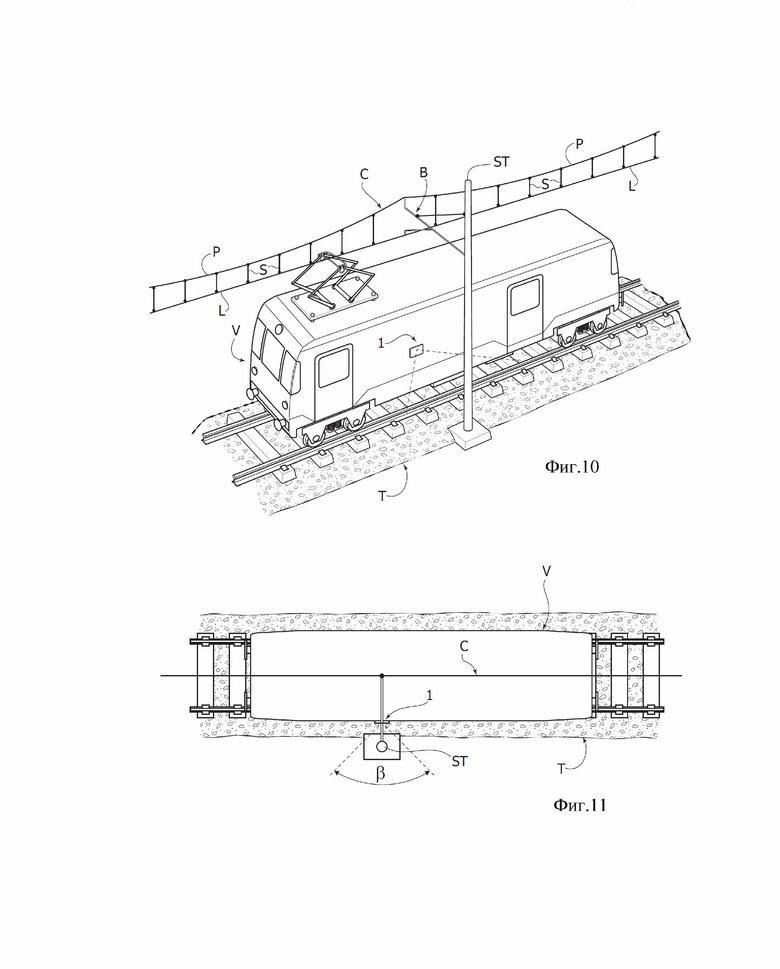
Как показано на фиг. 10 и 11, в еще одном варианте осуществления системы 1 можно предусмотреть радар 2, который может быть установлен на одной стороне железнодорожного транспортного средства V и приспособлен для детекции положения опорных столбов ST.
Также в этом случае устройство 2 детекции электромагнитных волн предпочтительно представляет собой радар с использованием фазированной решетки, приспособленный для сканирования железнодорожной инфраструктуры в пределах диапазона измерения, определяемого углом β, который может изменяться в зависимости от возбуждения приемопередающих антенн самого радара 2.
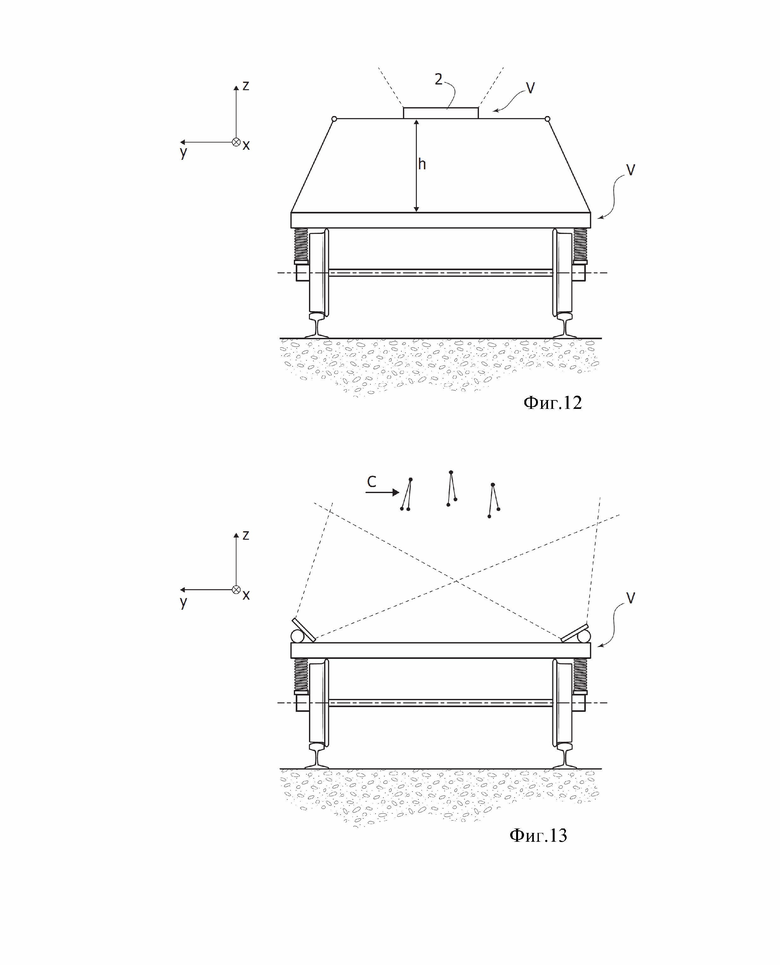
Как показано на фиг. 12 и 13, в еще одном варианте осуществления системы 1 можно предусмотреть радар 2, который может быть установлен на платформе железнодорожного вагона или дрезины, даже с приведением в действие человеком или толкаемым или буксируемым людьми на грунте, и приспособлен для детекции положения проводов (грузонесущий кабель Р или контактные провода L) воздушной линии С. Опорным параметром в данном случае является расстояние h, измеренное в (вертикальном) направлении Z с относительно плоскости (параллельной плоскости XY), касательной к платформе вагона или дрезины, что соответствует расстоянию системы 1 от плоскости самой платформы.
Расстояние h является функцией желаемого поперечного разрешения (ось Y) инструмента: чем лучше желаемое разрешение, тем больше расстояние h. Также в этом случае устройство 2 детекции электромагнитных волн предпочтительно представляет собой радар с использованием фазированной решетки, приспособленный для сканирования железнодорожной инфраструктуры (воздушная линия L) в диапазоне измерения, определяемом углом β, который изменяется как функция управления приемопередающими антеннами самого радара 2. Согласно предпочтительному аспекту изобретения, аппаратное обеспечение системы 1 унифицировано для всех применений, описанных в данном документе; т.е. предпочтительно, чтобы система приемопередающих антенн всегда имела одну и ту же структуру независимо от применения.
Адаптация рабочих параметров достигается за счет генерации различных сигналов для управления антеннами. Угол β в общем случае является одним из параметров, которые адаптируются путем выполнения изменений в отношении управляющих сигналов. Например, в случае транспортных средств V, состоящих из низких или опущенных вагонов, вагонеток или дрезин (малое расстояние h), предпочтительно устанавливать угол β на меньшие значения, чем в случае большого расстояния h, чтобы исследовать всегда и только ту область, что представляет интерес в поперечном направлении Y.
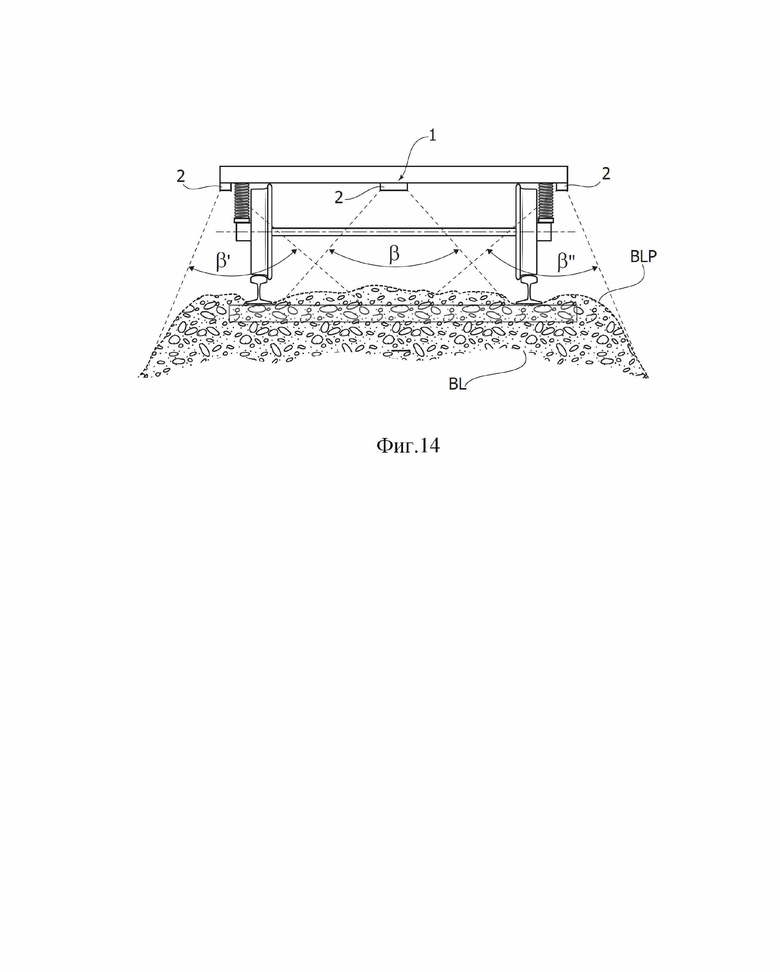
Как показано на фиг. 14, в еще одном варианте осуществления системы 1 можно предусмотреть радар 2, который может быть установлен под днищем (любого) железнодорожного транспортного средства и приспособлен для детекции профиля BLP путевого балласта BL. В этом случае балласт составляет линейную инфраструктуру, исследуемую с помощью системы 1, а профиль BPL соответствует огибающей положений каждой точки балласта относительно системы отсчета каждого устройства 2 детекции электромагнитных волн.
В предпочтительном варианте осуществления система 1 содержит три радара 2, которые расположены один в центральном положении, а два других по обе стороны от транспортного средства, так чтобы покрывать все поперечное сечение балласта BL. В целом, количество радаров 2 соизмеримо с поперечным сечением балласта и углом измерения (или диапазоном углов измерения) β каждого радара 2. В качестве примера на фиг. 14 три радара 2 представлены как имеющие углы измерения β (центральный радар), β' (левый радар), β'' (правый радар). В соответствии с потребностями три угловых значения могут быть идентичными друг другу, адаптированы к площади (например, β≠β'=β''), или же все они могут отличаться друг от друга (β≠β'≠β'').
Детекция профиля BLP балласта BL дает, когда железнодорожное транспортное средство V движется, последовательность поперечных профилей (т.е. профилей, поперечных по отношению к железнодорожному пути, следовательно, по отношению к направлению движения), которые соответствуют либо участку пути между двумя последовательными шпалами или участку пути, охватывающему шпалы. Профиль, детектированный на последнем участке, предоставляет ссылку для обработки профиля, детектированного в пространстве между последовательными шпалами: в частности, блок управления С может быть запрограммирован на распознавание профилей BPL, детектированных в пространствах между последовательными шпалами (следовательно, представляющих только балласт) и те, что получены, когда присутствует шпала, так чтобы сравнивать первое со вторым и определять отклонения профиля BPL только балласта относительно профилей BPL, детектированных там, где присутствуют шпалы (которые по большей части представляют собой профили самих шпал). Таким образом, может быть рассчитан индикатор отклонения профиля, детектированного там, где присутствует только балласт, по сравнению с профилем, детектированным там, где присутствуют только шпалы, и может быть зарегистрирован дефект, когда индикатор отклонения является чрезмерным в положительном направлении, (балласт на шпалах: риск повреждения нижней части железнодорожного транспорта из-за подбрасывания камней) или в отрицательном направлении (балласт слишком далеко ниже шпал: риск смещения уклона).
Также в случае варианта осуществления с фиг. 14, система 1 может быть оборудована одним или более устройствами получения изображения, которые взаимодействуют с одним или более устройств детекции электромагнитных волн (например, радарами) 2.
В каждом из вариантов осуществления, описанных в данном документе, система 1 позволяет реализовать способ детекции линейной инфраструктуры, содержащий:
- установку системы 1 детекции на железнодорожном транспортном средстве V любого типа (локомотив, пассажирский вагон, грузовой вагон, вагонетка или дрезина);
- движение железнодорожного транспортного средства по железнодорожному пути, где расположены подлежащие детекции линейные инфраструктуры;
- активацию по меньшей мере одного устройства детекции электромагнитных волн (например, радара 2) для направления электромагнитных волн на сетевую инфраструктуру, подлежащую детекции; и
- обработку, посредством блока управления, электромагнитных волн, отраженных линейной инфраструктурой, и определение положения линейной инфраструктуры относительно предварительно заданной системы отсчета (например, относительно локальной системы отсчета устройства 2 или, опять же, по отношению к системе отсчета, в свою очередь, определенной по отношению к одной или более локальным системам отсчета устройства 2 или устройств 2).
Специалисту в данной области будет понятно, что система 1 согласно изобретению свободна от всех проблем загрязнения, которые присущи оптическим устройствам известного типа, с сохранением при этом всех их преимуществ. Фактически, устройства 2 детекции электромагнитных волн по существу нечувствительны к загрязнению - независимо от того, установлены ли они на крыше, по бокам или под днищем транспортного средства - и точно так же могут быть установлены на железнодорожном транспортном средстве как это определяется необходимостью. При этом устройства 2 детекции электромагнитных волн не требуют контакта между ними и воздушной линией С, поэтому их можно использовать для измерения любого участка линии, даже не задействованного в питании железнодорожного транспортного средства V.
Разумеется, детали конструкции и варианты осуществления могут широко варьироваться относительно описанных и проиллюстрированных без выхода за объема охраны, определяемого прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГЕОРАДАРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ВЛАЖНОСТИ, ЗАГРЯЗНЕННОСТИ И ТОЛЩИНЫ СЛОЕВ ЖЕЛЕЗНОДОРОЖНОЙ И АВТОДОРОЖНОЙ НАСЫПИ С ИСПОЛЬЗОВАНИЕМ ОТРАЖАТЕЛЬНОГО ГЕОТЕКСТИЛЯ | 2014 |
|
RU2577624C1 |
| Система определения местоположения железнодорожного подвижного состава | 2018 |
|
RU2698498C1 |
| СПОСОБ И УСТРОЙСТВО РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА ОТНОСИТЕЛЬНО ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2022 |
|
RU2793338C1 |
| Система определения скорости локомотива и направления движения | 2023 |
|
RU2808860C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНОЙ СКОРОСТИ ЛОКОМОТИВА | 2001 |
|
RU2189599C1 |
| Локомотивная система определения скорости движения и пройденного пути | 2023 |
|
RU2808862C1 |
| РАДИОЛОКАЦИОННЫЙ МОДУЛЬ И ИЗВЕЩАТЕЛИ ОХРАНЫ НА ЕГО ОСНОВЕ | 2009 |
|
RU2406154C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНОЙ СКОРОСТИ ЛОКОМОТИВА | 2001 |
|
RU2189600C1 |
| МОБИЛЬНАЯ АНТЕННАЯ УСТАНОВКА | 2018 |
|
RU2695040C1 |
| СПОСОБ КОМПЛЕКСНОГО ОБСЛЕДОВАНИЯ ЗЕМЛЯНОГО ПОЛОТНА ЖЕЛЕЗНЫХ ДОРОГ | 2008 |
|
RU2380472C2 |
Группа изобретений относится к устройству для проверки состояния контактной линии. Система детекции для линейных инфраструктур железнодорожной линии содержит по меньшей мере одно устройство детекции электромагнитных волн и блок управления, выполненный с возможностью обработки электромагнитных волн, отраженных указанной линейной инфраструктурой, и определения положения линейной инфраструктуры относительно заранее заданной системы отсчета. При этом указанное устройство детекции электромагнитных волн приспособлено для установки на борту железнодорожного транспортного средства, причем устройство детекции электромагнитных волн содержит радар с фазированной решеткой, включающий в себя множество приемопередающих антенн. Также заявлены железнодорожное транспортное средство, содержащее систему детекции для линейных инфраструктур железнодорожной линии, и способ детекции линейных инфраструктур посредством системы детекции. Технический результат заключается в обеспечении возможности определения положения линейных инфраструктур железнодорожной линии при загрязнении атмосферными агентами или загрязнении от движения самого транспорта. 3 н. и 7 з.п. ф-лы, 14 ил.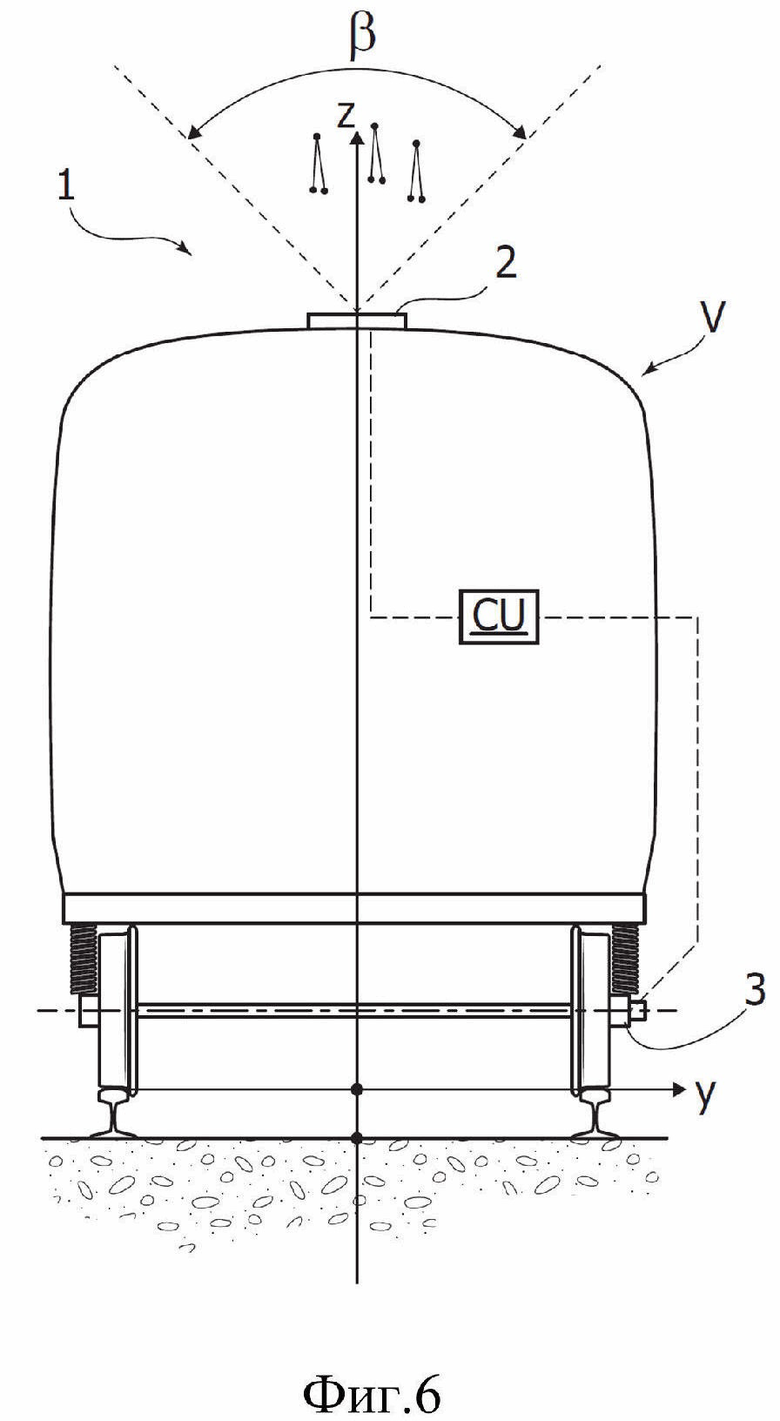
1. Система (1) детекции для линейных инфраструктур (С, Р, L, ST, В, BL) железнодорожной линии, содержащая:
- по меньшей мере одно устройство (2, 2А, 2В) детекции электромагнитных волн, содержащее по меньшей мере одну приемопередающую антенну, причем устройство (2, 2А, 2В) детекции электромагнитных волн приспособлено для излучения электромагнитных волн в направлении линейной инфраструктуры (С, Р, L, ST, В, BL) посредством указанной по меньшей мере одной приемопередающей антенны и для приема электромагнитных волн, отраженных указанной линейной инфраструктурой (С, Р, L, ST, В, BL); и
- блок управления, приспособленный для обработки электромагнитных волн, отраженных указанной линейной инфраструктурой (С, Р, L, ST, В, BL), и определения положения указанной линейной инфраструктуры (С, Р, L, ST, В, BL) относительно заранее заданной системы отсчета,
при этом указанное по меньшей мере одно устройство (2, 2А, 2В) детекции электромагнитных волн приспособлено для установки на борту железнодорожного транспортного средства (V).
2. Система (1) детекции по п. 1, в которой указанное по меньшей мере одно устройство (2, 2А, 2В) детекции электромагнитных волн содержит радар с фазированной решеткой, включающий в себя множество приемопередающих антенн.
3. Система (1) детекции по п. 2, в которой указанное по меньшей мере одно устройство (2А, 2В) детекции электромагнитных волн содержит пару радаров с фазированной решеткой, имеющих инцидентные оси.
4. Система (1) детекции по п. 3, в которой приемопередающие антенны первого радара (2А) с фазированной решеткой указанной пары питаются на другой частоте по сравнению с приемопередающими антеннами второго радара (2В) с фазированной решеткой указанной пары.
5. Система (1) детекции по любому из предыдущих пунктов, дополнительно содержащая по меньшей мере одно устройство (3) получения изображения, приспособленное для взаимодействия с указанным по меньшей мере одним устройством (2, 2А, 2В) детекции электромагнитных волн для получения данных изображения, относящихся к линейной инфраструктуре (С, Р, L, ST, В, BL), на которую падают электромагнитные волны, излучаемые указанным по меньшей мере одним устройством (2, 2А, 2В) детекции электромагнитных волн.
6. Железнодорожное транспортное средство (V), содержащее систему (1) детекции по любому из пп. 1-5.
7. Железнодорожное транспортное средство (V) по п. 6, в котором указанная система детекции установлена в комбинации или в качестве альтернативы:
- на крыше транспортного средства,
- сбоку корпуса транспортного средства,
- под платформой транспортного средства.
8. Способ детекции линейных инфраструктур посредством системы (1) детекции по любому из пп. 1-5, содержащий:
- установку системы (1) детекции на железнодорожном транспортном средстве (V);
- перемещение железнодорожного транспортного средства по железнодорожному пути, где расположены подлежащие детекции линейные инфраструктуры;
- активацию указанного по меньшей мере одного устройства (2, 2А, 2В) детекции электромагнитных волн для направления электромагнитных волн на линейную инфраструктуру, подлежащую детекции; и
- обработку, посредством указанного блока управления, электромагнитных волн, отраженных указанной линейной инфраструктурой (С, Р, L, ST, В, BL), и определение положения указанной линейной инфраструктуры (С, Р, L, ST, В, BL) относительно заранее заданной системы отсчета.
9. Способ по п. 8, в котором указанная линейная инфраструктура представляет собой по меньшей мере одно из следующего:
- воздушную силовую линию (С);
- опорные кронштейны (В) воздушной силовой линии (С);
- опорные столбы воздушной силовой линии (С); и
- балласт (BL) железнодорожного пути.
10. Способ по п. 9, в котором линейная инфраструктура представляет собой железнодорожный балласт (BL), и указанное определение положения указанной линейной инфраструктуры (BL) относительно заданной системы отсчета содержит определение профиля (BLP) указанного балласта (BL) вдоль поперечного сечения железнодорожного пути, в частности, поперечного по отношению к направлению движения перемещающегося железнодорожного транспортного средства (V).
| CN 107678036 A, 09.02.2018 | |||
| WO 9731810 A1, 04.09.1997 | |||
| US 2018329052 A1, 15.11.2018 | |||
| УСТРОЙСТВО для РЕГУЛИРОВАНИЯ НАПРЯЖЕНИЯ | 0 |
|
SU189477A1 |

