Предлагаемые способ и устройство относятся к области ближней радиолокации непрерывного излучения, и могут быть использованы в системах автоматизированного управления транспортных средств, в том числе беспилотных. Изобретение может быть использовано в локомотивных устройствах безопасности и управления, в частности, в устройствах регистрации параметров движения и контроля скоростного режима ведения поезда, а также в устройствах контроля скорости иных наземных транспортных средств.
Хорошо известный в радиолокации доплеровский эффект широко используется в измерениях скорости и пройденного пути автомобильных и железнодорожных транспортных средств, тракторов и строительной техники [1-11]. Излучаемые антенной бортового радиолокатора электромагнитные волны отражаются от подстилающей поверхности со смещением частоты и попадают через антенну в приемник. Получаемая в нем разностная (доплеровская) частота Fд определяет путевую скорость Vтс движения транспортного средства, что видно из следующего уравнения:

где
Vтс - путевая скорость движения транспортного средства;
Fд - частота Доплера;
с - скорость распространения электромагнитного излучения;
 - частота электромагнитного излучения;
- частота электромагнитного излучения;
θ - угол облучения подстилающей поверхности.
Интегрируя выражение (1) для скорости, получают пройденный путь. Один период доплеровского сигнала с частотой 24,125 ГГц и углом излучения 35° соответствует прохождению отрезка пути длиной 8 мм. Суммируя число периодов доплеровского сигнала, получают величину пройденного пути. Для учета направления движения используют дополнительный квадратурный канал получения доплеровского сигнала с фазовым смещением ±90°. По знаку разности фаз этих сигналов определяют направление движения транспортного средства.
Такие важные параметры, как точность и надежность измерения скорости и пройденного пути, определяются величиной и качеством отраженного сигнала, которые, в свою очередь, в большой степени зависят от характеристик подстилающей поверхности, а также вида формируемого антенной поля. Для того чтобы не было полного зеркального отражения, когда угол падения равен углу отражения, поверхность должна обладать определенной минимальной шероховатостью Δr, чтобы часть излучения вернулась к антенне. При этом действует следующий критерий [10]:

где
Δr - шероховатость поверхности;
λ - длина волны излучения;
с - скорость распространения электромагнитного излучения;
 - частота электромагнитного излучения;
- частота электромагнитного излучения;
θ - угол облучения подстилающей поверхности.
Таким образом, при длине волны λ=1,25 см (частота 24,125 ГГц) и θ=45° шероховатость должна быть не менее 2 мм. Это условие хорошо выполняется, например, на железнодорожном пути со щебеночным балластом. В таком случае подстилающую поверхность можем представить в виде множества излучателей Ламберта (см. раздел 3.8, стр. 182-191, [12]), где отраженная энергия пропорциональна косинусу угла падения. В диапазоне обычно используемых углов раскрытия антенны Δθ=6…60° амплитуду отраженного сигнала можно считать практически независимой от направления распространения. В этом случае говорят об изотропном отражении от поверхности, которое характеризуется диаграммой обратного рассеяния (ДОР)

где
σ(θ) - ДОР подстилающей поверхности;
 - нормированная ДОР
- нормированная ДОР 
σ0 - некоторый масштабный множитель, учитывающий поглощение излучения при отражении.
θ - угол облучения подстилающей поверхности.
Несколько иная картина на пути с гладким бетонным основанием, когда шероховатость поверхности приближается к предельной, отвечающей условию выражения (2), характеристика направленности становится более выраженной, а амплитуда отраженного излучения сильно зависимой от угла облучения θ (см. рис. 3.34, стр. 186, [12]).
Формируемый антенной луч электромагнитного излучения не является строго параллельным и характеризуется некоторой расходимостью в вертикальной и горизонтальных плоскостях:

где
Δθ - угловая ширина луча в вертикальной плоскости;
Δβ - угловая ширина луча в горизонтальной плоскости;
с - скорость распространения электромагнитного излучения;
 - частота электромагнитного излучения;
- частота электромагнитного излучения;
D0, Dβ - раскрыв антенны в вертикальной и горизонтальной плоскостях соответственно.
Угловая расходимость луча приводит к разбросу доплеровских частот отраженного сигнала, полученного от каждого i-го парциального элемента неоднородности подстилающей поверхности:

где
Fдi - частота Доплера от i-го элемента неоднородности подстилающей поверхности;
Vтс - путевая скорость движения транспортного средства;
 - частота электромагнитного излучения;
- частота электромагнитного излучения;
с - скорость распространения электромагнитного излучения;
δθi, δβi - углы визирования i-го элемента облучения неоднородности в вертикальной и горизонтальной плоскостях соответственно.
Благодаря конечной ширине луча антенны Δθ и Δβ спектр доплеровских частот получается ограниченным. Доплеровское расхождение частот выразится как разность между крайними значениями частоты в пределах ширины луча при углах (θ-0,5Δθ) и (θ+0,5θθ) с учетом угла 0,5Δβ. В результате сложения статистически независимых сигналов от всех неоднородностей (4), находящихся в поле излучения антенны в пределах отмеченных углов, на выходе смесителя приемника формируется преобразованный сигнал в виде флуктуационного шума с эффективной шириной спектра ΔFфл, которая определяется выражением:

где
ΔFфл - эффективная ширина спектра флуктуационного шума;
 - стандартное отклонение от среднего значения флуктуационного шума доплеровской частоты;
- стандартное отклонение от среднего значения флуктуационного шума доплеровской частоты;
Vтс - путевая скорость движения транспортного средства;
θ - угол облучения подстилающей поверхности;
Δθ - угловая ширина луча в вертикальной плоскости;
Δβ - угловая ширина луча в горизонтальной плоскости;
Dθ, Dβ - раскрыв антенны в вертикальной и горизонтальной плоскостях соответственно.
Выражение (6) отличается от формулы (5), полученной в [2], вторым членом суммы в скобках. Этот член учитывает элементы неоднородности облучаемой подстилающей поверхности, которые отстоят от продольной оси антенны на углы ±Δβ.
Форма спектра (6) зависит от вида формируемого поля в ближней зоне антенны. Обычно для антенн с расходящимся лучом при пренебрежении боковыми лепестками спектр определяется формой диаграммы направленности антенны, и для однородных поверхностей дороги соответствует гауссовой кривой (см. фиг. 1 и 2 работы [2]).
Статистические вариации элементов отражающей поверхности дороги при движении транспортного средства порождают шумы сканирования. Разброс частот сканирования для антенны с расходящимся лучом по углам θ и β описывается выражением:

где
ΔFск - эффективная ширина спектра шума сканирования;
 - стандартное отклонение от среднего значения спектра шума сканирования;
- стандартное отклонение от среднего значения спектра шума сканирования;
Vтс - путевая скорость движения транспортного средства;
λ - длина волны электромагнитного излучения;
θ - угол ориентации облучения подстилающей поверхности;
Dθ, Dβ - раскрыв антенны в вертикальной и горизонтальной плоскостях соответственно;
H - высота установки антенны относительно дорожного полотна;
Δβ - угловая ширина луча в горизонтальной плоскости;
Выражение (7) отличается от формулы (21), полученной в [2], вторым членом суммы в скобках. Этот член учитывает элементы неоднородности облучаемой подстилающей поверхности, которые отстоят от продольной оси антенны на углы ±Δβ.
Обе эти компоненты ΔFфл и ΔFск являются помехой по отношению к полезному сигналу и снижают точность измерения скорости даже в условиях однородной отражающей поверхности, например, полотна асфальтированной автомобильной дороги. Общее стандартное отклонение σд с учетом значений шума (6) и (7) составляет [5]:

где
σд - стандартное отклонение спектра шума сканирования;
 - стандартное отклонение от среднего значения флуктуационного шума доплеровской частоты;
- стандартное отклонение от среднего значения флуктуационного шума доплеровской частоты;
 - стандартное отклонение от среднего значения спектра шума сканирования.
- стандартное отклонение от среднего значения спектра шума сканирования.
Нормированное стандартное отклонение σд/Fд, представляющее как шум флуктуаций, так и шум сканирования, определяет относительную погрешность измерений скорости. При этом в обсуждаемом приложении спектральный разброс, обусловленный сканированием, примерно на порядок меньше, чем разброс, обычно вносимый флуктуационным шумом.
Измерение скорости, в принципе, сводится к нахождению среднего значения доплеровской частоты  в пределах заданного интервала времени Tизм. При этом выражение для нормированного стандартного отклонения
в пределах заданного интервала времени Tизм. При этом выражение для нормированного стандартного отклонения  измеренных значений имеет вид [2]:
измеренных значений имеет вид [2]:

где
σд,Т - стандартное отклонение измеренных значений частоты 
 - среднее измеренное значение доплеровской частоты
- среднее измеренное значение доплеровской частоты 
Тизм - значение измерительного интервала времени;
σд - стандартное не усредненное отклонение.
Как следует из (9), с увеличением мерного интервала Тизм погрешность измерений уменьшается, при этом в пределе измеренное значение частоты  стремится к величине, которая соответствует центру тяжести спектра сигнала (см. стр. 24, фиг. 2 статьи [5]). Обычно путем умножения полученного среднего значения частоты
стремится к величине, которая соответствует центру тяжести спектра сигнала (см. стр. 24, фиг. 2 статьи [5]). Обычно путем умножения полученного среднего значения частоты  на поправочный коэффициент Kп получают скорость
на поправочный коэффициент Kп получают скорость  транспортного средства:
транспортного средства: 
Из-за уменьшения энергии отраженного сигнала пропорционально квадрату расстояния от отражающей поверхности центр тяжести спектра обычно смещен относительно центра гауссова распределения. Поэтому результаты усредняющих измерений имеют методическую погрешность, зависящую как от угла облучения поверхности, так и от характера ее неоднородностей. Частично эта погрешность устраняется выбором величины поправочного коэффициента Kп, определяемого в результате калибровки измерителя, что обычно практикуется на автомобильном транспорте. В условиях железнодорожного транспорта более целесообразно выполнение коррекции величины поправочного коэффициента Kп по реперным точкам на пути движения транспортного средства.
В радиолокационных спидометрах для автомобилей и тракторов основные ошибки измерений, кроме указанных выше флуктуационных и сканирования, обусловлены также изменениями угла облучения поверхности вследствие тангажа и рыскания корпуса, качки и заноса, а также вертикальными вибрациями транспортного средства из-за неровностей дороги [2-8]. Все перечисленные причины вызывают дополнительные флуктуации амплитуды и фазы доплеровского сигнала, его замирания и скачки, а также пропадания сигнала. Необходимо отметить, что ошибки из-за изменения угла облучения уменьшаются примерно на порядок при использовании двух радиолокационных спидометров, один из которых направлен по ходу, а другой против хода движения по схеме «Двуликий Янус» (см. рис. 2 на стр. 13 статьи [9], рис. 2.20 на стр. 72 книги [10]).
В условиях железной дороги, как показали исследования [10, 11], влиянием изменений угла облучения поверхности можно пренебречь. При этом формирование доплеровского сигнала измерителей скорости определяется особенностями строения верхнего уровня пути. От щебеночного балласта порождаемый сигнал, естественно, имеет вид, характерный однородной поверхности. Однако неоднородности пути типа бетонных, стальных или деревянных шпал, а также элементы крепления к ним рельсов вызывают ярко выраженный максимумы в виде всплесков уровня отраженного излучения. Наличие рельсов, стальных шпал, мостовых металлоконструкций и прочих элементов в поле излучения антенны также усложняют радиолокационную картину подстилающей поверхности. Формируемый в данных условиях доплеровский сигнал имеет сложную структуру, которую при обработке сигналов в измерителях скорости высокой точности необходимо учитывать.
Известны устройства для радиолокационного измерения скорости и пройденного пути транспортных средств, предложенные согласно патентам [13-24], которые содержат последовательно соединенные антенну, доплеровский приемо-передатчик и блок обработки сигналов. В этих устройствах используются антенны, имеющие диаграмму направленности в виде расходящегося луча, фронт волны которых сферический. Доплеровские приемо-передатчики, обычно выполненные по гомодинной или автодинной схеме, обеспечивают формирование доплеровского сигнала, частота которого пропорциональна скорости транспортного средства. 1 В блоке обработки производится первичная обработка доплеровского сигнала, а также его преобразование в цифровые показания скорости транспортного средства и его пробега.
Основные отличия известных устройств состоят в реализации технических решений первичной обработки сигналов, предназначенной для улучшение качества сигналов путем их фильтрации, анализа, запоминания и восстановления с целью повышения точности и надежности измерений. Несмотря на большое число технических решений, направленных на улучшение качества сигналов при их первичной обработке, все они не устраняют основной недостаток известных способов и устройств, связанный с наличием помех и искажений доплеровского сигнала из-за сферичности фронта излучаемой антенной волны. Эти искажения, порождающие формирование доплеровского сигнала в виде флуктуационного шума и шума сканирования, ограничивают потенциальные возможности повышения точности измерения скорости и пройденного пути транспортного средства. Кроме того, для точного определения скорости транспортного средства требуется большое время измерения.
Известны также устройства [25-29] для радиолокационного измерения параметров движения транспортного средства относительно подстилающей поверхности. В данных измерителях, в отличие от упомянутых выше, используются рупорно-линзовые антенны, которые благодаря наличию фокусирующей линзы формируют электромагнитное излучение в виде карандашного луча. Такая форма луча уменьшает диаметр облучаемого «пятна» на поверхности полотна дороги, что снижает согласно (6) разброс ΔFфл доплеровских частот. Формируемый при этом практически плоский фронт волны на всем протяжении луча значительно увеличивает в (7) виртуальную высоту Hv, установки радиолокационного измерителя, без изменения конструктивных и иных факторов. Тем самым уменьшается также шум сканирования ΔFск. Отмеченные достоинства применения такой формы излучения в радиолокационных измерителях подтверждены результатами экспериментальных исследований (см. раздел 3.4 на стр. 12-14 работы [2], и стр. 194-195 статьи [3]), полученными с одной и той же рупорной антенной.
Недостатком известных устройств являются их сравнительно большие габариты по высоте из-за применяемых типов антенн (рупорные, линзовые, параболические), создающие проблему при размещении радиолокационного устройства под кузовом транспортного средства.
Известны также радиолокационные устройства для измерения параметров движения транспортного средства относительно подстилающей поверхности (см. патенты [30-34], статью [35], раздел 2.1 статьи [36]). В данных измерителях, в отличие от упомянутых выше, используются волноводные и волноводно-рупорные антенны вытекающей волны (ABB) продольная ось которых совпадает с направлением движения транспортного средства. Эти антенны в ближней зоне по длине излучающего волновода формируют протяженное наклонное к подстилающей поверхности излучение в виде параллельных лучей с практически плоским фронтом волны. Такая структура поля по сравнению с существующими аналогами измерителей, использующих традиционные (рупорные, линзовые, параболические) антенны, позволяет значительно улучшить качество доплеровского сигнала, существенно уменьшив глубину его флуктуаций, а также повысить точность измерения скорости и уменьшить высоту устройства.
Известно устройство (прототип) радиолокационного измерения параметров движения транспортных средств, содержащий последовательно соединенные волноводно-рупорную ABB, автодинный приемо-передатчик и блок обработки сигналов (см. раздел 2.1 статьи: Носков В.Я., Варавин А.В., Васильев А.В., Ермак Г.П. и др. Современные гибридно-интегральные автодинные генераторы микроволнового и миллиметрового диапазонов и их применение. Часть. 9. Радиолокационное применение автодинов // Успехи современной радиоэлектроники. 2016. №3. С. 32-86. [36]). При этом автодинный приемо-передатчик выполнен в виде системы двух взаимно связанных синхронизированных СВЧ генераторов, обеспечивающих получение на выходе подключенных к ним блоков выделения двух автодинных сигналов доплеровской частоты, имеющих относительный сдвиг фаз 90 градусов.
Исходя из принципа действия устройства-прототипа в нем заложен способ радиолокационного измерения скорости движения наземного транспортного средства, включающий генерацию зондирующих высокочастотных колебаний, формирование из них по оси антенны плоского фронта электромагнитного излучения, нормаль которого направлена под острым углом к подстилающей поверхности, а его проекция на подстилающую поверхность совпадает или противоположна с вектором скорости транспортного средства, облучение этой поверхности электромагнитным излучением, прием отраженного от неоднородностей и шероховатостей подстилающей поверхности части излучения, смешение его с частью зондирующих колебаний, преобразование частоты полученной смеси высокочастотных колебаний в область низких частот, выделение из преобразованных колебаний доплеровских сигналов и их обработка, причем по частоте доплеровских сигналов определяют скорость движения транспортного средства, интегрированием периодов сигналов - пройденный путь, а по разности фаз доплеровских сигналов - направление движения.
Общим недостатком прототипа и известных аналогов является узкая диаграмма направленности антенны как в продольной, так и поперечной плоскостях сечения относительно направления движения транспортного средства. Этот недостаток приводит к формированию малого по площади пятна облучения на подстилающей поверхности. По этой причине в ряде случаев происходит значительное ухудшение точности измерений вплоть до полного сбоя процесса измерения вследствие значительного уменьшения или даже отсутствия отраженного излучения. Такие ситуации возникают, например, при прохождении локомотивом по железнодорожному мосту с просветами между шпал, участков дороги, залитых водой или покрытых листовым железом на железнодорожных переездах.
В случае применения ABB, как отмечалось выше, обеспечивается формирование плоского фазового фронта волны в продольной плоскости сечения поля, что значительно снижает уровень составляющих флуктуационных шумов ΔFфл (6) и шумов сканирования ΔFск (7), а также возможность формирования протяженного пятна облучения в направлении движения транспортного средства. Однако в поперечной плоскости сечения электромагнитное поле излучения имеет цилиндрический характер фазового фронта волны. Данная цилиндричность является причиной, ограничивающей дальнейшее повышение точности измерения скорости. Она порождает наличие флуктуационных и сканирующих шумов доплеровского сигнала от неоднородностей подстилающей поверхности, находящихся сбоку относительно оси движения, где как раз и проявляются эти искажения фазового фронта.
В последние годы в связи с активным развитием беспилотных и высокоскоростных технологий на автомобильном и железнодорожном транспорте возросли требования к его безопасности. В связи с этим новые технические решения, направленные на улучшение качественных показателей датчиков и измерителей для современных систем автоматизированного управления движением транспортных средств, являются востребованными. Поэтому повышение точности и надежности радиолокационных измерителей параметров движения транспортных средств относительно полотна дороги является важной проблемой, решение которой позволит для транспорта создать прецизионные измерители скорости, свободные от указанных недостатков.
Технический результат настоящего изобретения заключается в повышении точности и надежности измерения скорости движения наземных транспортных средств относительно дорожного полотна путем улучшения качества доплеровских сигналов за счет усовершенствования антенной системы.
Повышение точности измерений достигается за счет формирования в ближней зоне антенны плоского фазового фронта излучения по всему его сечению. При этом повышение надежности измерений обеспечивается благодаря применению протяженной антенны в направлении движения транспортного средства. Такая антенна обеспечивает формирование соответствующего пятна облучения на подстилающей поверхности, которое может перекрывать по расстоянию две или более неоднородностей дорожного полотна, например, железнодорожных шпал. Прием отраженного излучения от неоднородностей и шероховатостей подстилающей поверхности выполняется всей апертурой антенны с последующим суммированием всех составляющих сигналов на выходе антенны. За счет суммирования множества парциальных волн, отраженных от блестящих точек этого пятна, пропадание части парциальных отражений (например, из-за просветов между шпалами на железнодорожном мосту) практически не оказывает влияния на результат измерений, поскольку результирующий сигнал при этом формируется оставшимися парциальными отражениями от блестящих точек. В случае наличия на фоне подстилающей поверхности значительной неоднородности, например, шпалы, скачок амплитуды сигнала менее выражен при наличии других сигналов, полученных от совокупности других неоднородностей, например, балласта и наличия других шпал. При этом если протяженность облучаемого пятна на дороге не меньше расстояния между шпалами, то выход из пятна одной шпалы при движении сопровождается появлением следующей шпалы или шпальных креплений рельса. Таким образом поддерживается более высокий уровень отраженного сигнала и его постоянство, что способствует повышению не только надежности, но и точности измерений.
Решение технической проблемы, на которое направлено настоящее изобретение, достигается тем, что в предлагаемых способе и устройстве реализован принцип согласованной пространственно-временной обработки радиосигналов, при котором как объект локации, так и антенная система наклонного излучения имеют пространственно-распределенный характер. При этом согласование достигается формированием плоского фазового фронта как падающего на подстилающую поверхность, так отраженного от неоднородностей на ней излучений. Такая картина электромагнитного поля обеспечивает «сжатие» отраженного сигнала по частоте, в результате которого на выходе преобразователя частоты от всех неоднородностей формируется совокупность квазигармонических временных сигналов в виде сигналов Доплера одной и той же частоты. Результатом сложения этих сигналов является сигнал также квазигармонический, в формировании которого участвует вся апертура антенной системы и область облучения на подстилающей поверхности.
Сущность способа радиолокационного измерения параметров движения наземного транспортного средства относительно подстилающей поверхности включает генерацию высокочастотных зондирующих колебаний, преобразование этих колебаний в зондирующие электромагнитные радиоволны с равномерным распределением их амплитуды по продольной оси апертуры антенны, излучение этих радиоволн под острым углом к подстилающей поверхности с формированием плоского фазового фронта по продольной оси апертуры антенны, причем проекция нормали к плоскости фазового фронта на подстилающую поверхность совпадает или противоположна с вектором скорости транспортного средства, облучение подстилающей поверхности электромагнитными радиоволнами одинаковой интенсивностью по продольной оси апертуры антенны, прием отраженных от неоднородностей и шероховатостей подстилающей поверхности парциальных радиоволн, сложение этих отраженных парциальных радиоволн и преобразование их в высокочастотные колебания отраженного радиосигнала, смешение высокочастотных колебаний отраженного радиосигнала с частью высокочастотных зондирующих колебаний, преобразование частоты полученной смеси в область низких частот, выделение из преобразованных колебаний квадратурных доплеровских сигналов и их обработка, причем по частоте доплеровских сигналов при их обработке определяют скорость движения транспортного средства, интегрированием периодов доплеровского сигнала - пройденный путь, а по разности фаз доплеровских сигналов - направление движения, с целью повышения точности и надежности измерения скорости зондирующие электромагнитные радиоволны равномерно распределяются также по ширине апертуры антенны и излучаются под тем же острым углом к подстилающей поверхности, как и осевое излучение радиоволн, с формированием общего плоского фазового фронта радиоволн всей апертуры антенны, облучение подстилающей поверхности электромагнитными радиоволнами одинаковой интенсивности по всей площади облучаемой поверхности, прием отраженных от неоднородностей и шероховатостей облучаемой подстилающей поверхности парциальных радиоволн и сложение этих отраженных парциальных радиоволн с парциальными радиоволнами, полученными по оси апертуры антенны.
Сущность устройства радиолокационного измерения параметров движения наземного транспортного средства относительно подстилающей поверхности, содержащего антенну наклонного излучения, подключенную к доплеровскому приемо-передатчику с квадратурным преобразованием частоты, низкочастотные сигнальные выходы которого подключены к блоку обработки доплеровских сигналов, состоит в том, что антенна наклонного излучения выполнена прямоугольной с плоским раскрывом излучающей поверхности, которая электрически представляет собой множество равномерно распределенных излучателей высокой частоты с равной амплитудой токов возбуждения, создающих в ближней зоне антенны наклонное к ее поверхности излучение с плоским фазовым фронтом в его сечении, при этом раскрыв излучающей поверхности антенны имеет размеры ширины S и длины L не менее десяти длин волн электромагнитных колебаний, причем длина L апертуры антенны при наличии на подстилающей поверхности периодических неоднородностей, например, железнодорожных шпал, должна быть не менее интервала между этими неоднородностями, продольная ось антенны совпадает с вектором скорости, а антенна своим плоским раскрывом излучающей поверхности должна быть закреплена на кузове транспортного средства параллельно подстилающей поверхности на высоте в соответствие с условием:

где
H - высота от центра антенны до отражающей поверхности;
Rд.з - радиус дальней зоны антенны;
L - продольный размер излучающей поверхности антенны;
θ - угол излучения антенны относительно ее плоскости;
λ - длина волны электромагнитного излучения.
Техническая реализация устройства имеет альтернативные решения.
Электродинамический эквивалент прямоугольного плоского раскрыва излучающей поверхности антенны наклонного излучения по длине и ширине содержит соответственно М и N рядов излучателей высокой частоты, причем по ширине каждый ряд из N излучателей возбуждается синфазно, а по длине антенны между любыми из М соседними синфазно возбуждаемыми рядами излучателей фаза тока возбуждения отличается от фазы тока предыдущего ряда излучателей на одну и ту же величину ψ.
Антенна наклонного излучения с прямоугольным плоским раскрывом излучающей поверхности может быть выполнена в виде волноводно-щелевой, полосковой или микрополосковой фазированной антенной решетки. Согласно другим вариантам антенны она может быть выполнена в виде антенной решетки дифракционного излучения или волноводно-линзовой антенны вытекающей волны.
Предлагаемое техническое решение обладает новизной, поскольку авторам неизвестны способы и устройства, содержащие признаки, которые фигурируют в предлагаемом изобретении в качестве отличительных признаков.
Изменение распределения зондирующего излучения с симметричного относительно продольной оси антенны с формированием цилиндрического фазового фронта на равномерное распределение зондирующего излучения по ширине поверхности антенны с формированием плоского фазового фронта всего излучения антенны, а также увеличение продольного размера антенны до величины не менее интервала между периодическими неоднородностями подстилающей поверхности и условие нахождения этой поверхности в ближней зоне антенны обеспечило получение нового свойства устройства - повышенные точность и надежность измерения скорости транспортного средства относительно подстилающей поверхности. Анализ результатов патентного поиска и литературных источников показал, что предлагаемое решение не следует явным образом из уровня техники. Из определенного выше уровня техники не выявлена известность влияния существенных признаков заявляемого технического решения на достижение указанного технического результата. Следовательно, заявляемое техническое решение соответствует условию патентоспособности «изобретательский уровень».
Изобретение направлено на улучшение характеристик работы устройств бесконтактного измерения скорости движения транспортных средств, предназначенных для систем безопасности и автоматизированного управления движения транспортных средств, в том числе беспилотных, что необходимо для развития коммуникационных отраслей деятельности человека. Таким образом, заявляемое изобретение соответствует критерию «промышленная применимость».
Сущность изобретения поясняется чертежами.
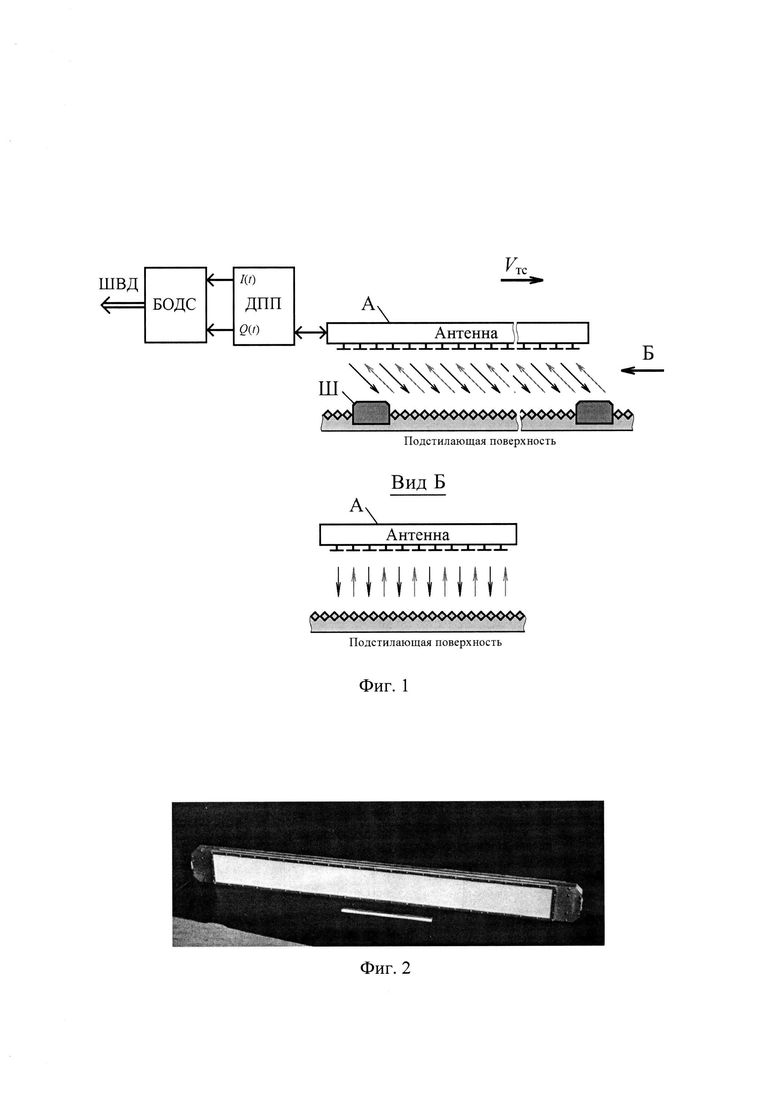
На фигуре 1 представлена структурная схема устройства и элементы подстилающей поверхности, поясняющие принцип действия: А - антенна наклонного излучения; ДПП - доплеровский приемо-передатчик с квадратурным преобразованием частоты; БОДС - блок обработки доплеровских сигналов; Ш - железнодорожная шпала; ШВД - шина выходных данных; Vтс - вектор скорости транспортного средства. Стрелками на фигуре показано падающее на подстилающую поверхность и отраженное от неоднородностей поверхности излучение.
На фигуре 2 представлена фотография предпочтительного варианта выполнения антенны А наклонного излучения со стороны ее излучаемой поверхности.
На фигуре 3 приведены варианты гомодинного (а) и автодинного (б) выполнения ДПП.
На фигуре 4 представлена структурная схема БОДС: 1 - двухканальный управляемый фильтр верхних частот (ДУ ФВЧ); 2 - двухканальный компаратор с гистерезисом; 3 - фазовый компаратор определения направления движения; 4 - обнаружитель пропадания сигнала; 5 - следящий фильтр на основе системы частотно-фазовой автоподстройки частоты (ЧФАПЧ); 6 - обнаружитель захвата следящего фильтра; 7 - переключатель сигналов; 8 - частотный компаратор; 9 и 10 - шины выходных данных (ШВД).
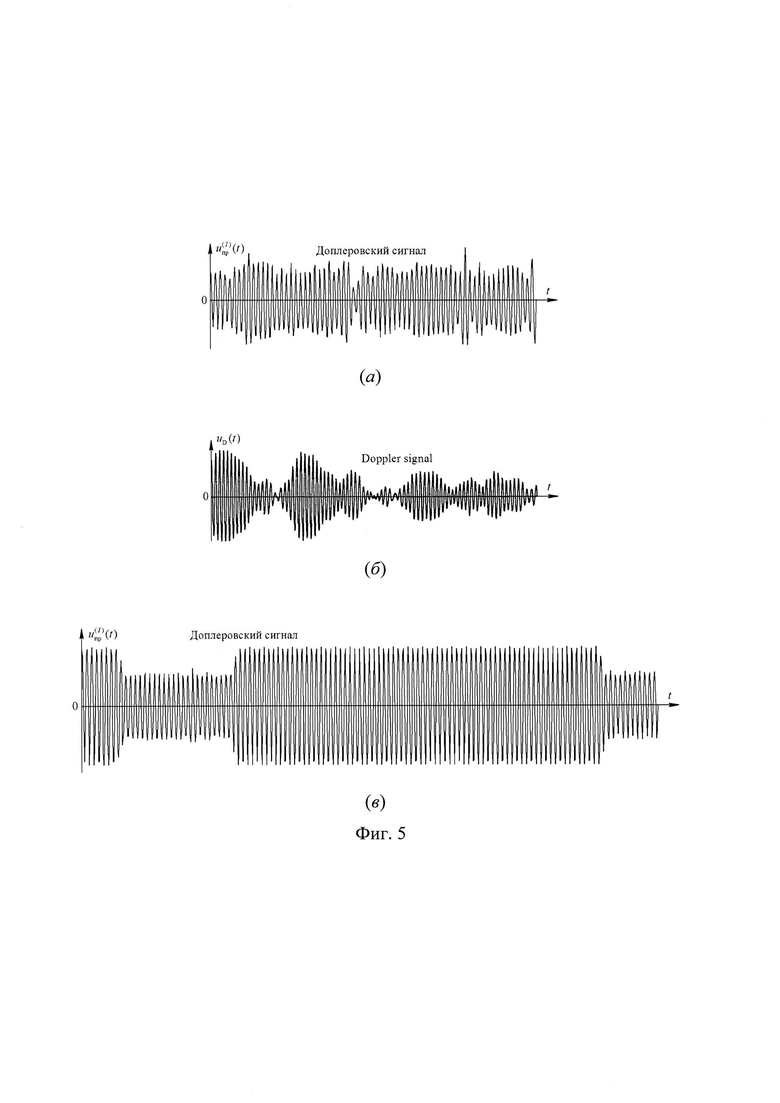
На фигуре 5 представлены фрагменты записи сигналов, полученные предлагаемым устройством (а) и (в), а также аналога из источника [6] (б).
Суть предложенного способа будет рассмотрена ниже при описании работы устройства.
Устройство (см. фигуру 1) содержит антенну А наклонного излучения, подключенную к доплеровскому приемо-передатчику ДПП с квадратурным преобразованием частоты, низкочастотные сигнальные выходы I(t) и Q(t) которого подключены к блоку обработки доплеровских сигналов БОДС.
Антенна А наклонного излучения имеет различные варианты исполнения. При этом общие требования ко всем вариантам антенны А состоят в следующем. Антенна А должна быть выполнена прямоугольной с плоским раскрывом излучающей поверхности, имеющей размеры ширины S и длины L не менее десяти длин волн электромагнитных колебаний. При наличии на подстилающей поверхности периодических неоднородностей, например, железнодорожных шпал, длина L апертуры антенны должна быть не менее междушпального интервала (из расчета 1840 шпал на километр). Продольная ось антенны должна совпадать с вектором скорости. Антенна должна формировать равномерное по поверхности наклонное излучение СВЧ с плоским фазовым фронтом в ближней зоне антенны. Проекция нормали к фазовому фронту на подстилающую поверхность должна быть сонаправленной или противоположно направленной вектору скорости транспортного средства. Антенна должна быть закреплена на кузове транспортного средства так, чтобы плоский раскрыв излучающей поверхности был параллелен подстилающей поверхности и находился на высоте, которая определяется следующим условием:

где
H - высота от центра антенны до отражающей поверхности;
Rд.з - радиус дальней зоны антенны;
L - продольный размер излучающей поверхности антенны;
θ - угол излучения антенны относительно ее плоскости;
λ - длина волны электромагнитного излучения.
По первому варианту антенна А может быть выполнена в виде прямоугольной фазированной антенной решетки (ФАР) с плоским раскрывом излучающей поверхности, которая по длине и ширине содержит соответственно М и JV рядов излучателей, причем по ширине каждый ряд из 7V излучателей возбуждается синфазно, а по длине антенны между любыми из М соседними синфазно возбуждаемыми рядами излучателей фаза тока возбуждения отличается от фазы тока предыдущего ряда излучателей на одну и ту же величину ψ. Методика конструирования и расчета таких антенн в виде волноводно-щелевой, волноводной, печатной полосковой или микрополосковой ФАР изложена в учебной литературе по антеннам (см., например, стр. 163-165, книги [37], стр. 140-162, 183-204, 278-290 книги [38]). Пример технического решения планарной полосковой антенны для радиолокационного измерителя скорости транспортного средства относительно дороги представлен в описании к английскому патенту GB 2235587 A (см. фиг. 2, [39]).
По второму варианту антенна А наклонного излучения с прямоугольным плоским раскрывом излучающей поверхности может быть выполнена в виде антенны дифракционного излучения (см. рис. 1, [40]). Антенна дифракционного излучения обычно состоит из передающей линии медленных поверхностных волн, например, диэлектрического волновода, и дифракционной решетки. Дифракционная решетка представляет собой гребенку периодических неоднородностей по ширине волновода на всю длину активной части антенны. Решетки могут быть выполнены печатным способом в виде ленты на слое фольгированного диэлектрика или в виде периодических канавок, стержней, выступов и других неоднородностей на основании антенны. При внесении дифракционной решетки в поле поверхностной волны диэлектрического волновода происходит преобразование поверхностной волны в объемную, которая приобретает пространственную ориентацию излучения под углом 6 к поверхности волновода и соосно с ним. Данное преобразование выполняется при наличии фазового синхронизма между медленной поверхностной волной диэлектрического волновода и быстрой волной, рассеянной дифракционной решеткой. Выбор периода решетки определяет фазовый синхронизм волн и угол 9 излучения быстрой волной, а расстояние между диэлектрическим волноводом и дифракционной решеткой определяет амплитуду излучения.
Методика конструирования и расчета таких антенн изложена в большом числе публикаций (см., например, статьи [40-42] и библиографию в них). Фотографии внешнего вида некоторых вариантов планарных антенн дифракционного излучения представлены на рис. 8-10 и 12 статьи [42]. Известны также описания оригинальных технических решений таких антенн (см., например, патенты [43, 44]). При этом особый интерес представляет экспериментальная антенна, показанная на фотографии рис. 20 статьи [42]. Данная антенна была разработана по заказу авторов настоящего изобретения специально для экспериментальной проверки заявленных способа и устройства измерения скорости транспортного средства относительно подстилающей поверхности дороги. Эта же фотография представлена на фигуре 2. Апертура антенны 1000×100 мм2, рабочая длина волны в свободном пространстве 8 мм, угол наклона пучка излучения 45° относительно плоскости антенны, общие потери в антенне составляют 2,7 дБ.
По третьему варианту выполнения антенна А наклонного излучения с прямоугольным плоским раскрывом излучающей поверхности может быть изготовлена в виде волноводно-рупорной антенны вытекающей волны, аналогичной используемой в прототипе (см. рис. 13 статьи [36]). Отличия могут состоять в отношении выполнения длины антенны и применения дополненной цилиндрической линзы в раскрыве рупора, как показано на рис. 2 статьи [42]. Эта линза корректирует фазовый фронт излучения, делая его в рабочем диапазоне расстояний плоским.
Необходимо отметить, что на краях апертуры антенны неизбежно наличие сферичности фазового фронта формируемого излучения. Однако, как показали результаты моделирования ближнего поля антенны вытекающей волны, влияние сферичности в ближней зоне антенны становится пренебрежимо малым в пределах ширины луча по уровню минус три дБ, если соответствующий раскрыв антенны превышает десять длин волн излучения (см. фиг. 3 и 4, [45]).
Доплеровский приемо-передатчик (ДПП) с квадратурным преобразованием частоты, имеющий выходы I(t) и Q(t) квадратурных сигналов, также имеет альтернативные технические решения. Он может быть выполнен по гомодинной [15-17] или автодинной [27-29, 32, 35, 36] схеме. ДПП может иметь в своем составе синтезатор частоты, программируемый контроллером. Необходимо отметить, что готовые модули ДПП выпускаются промышленностью (см., например, описание доплеровского модуля: «24.125 GHz Ranging Sensor Head, Dual Channel, Short Range», Model SSD-24303-20M-DW на сайте https://www.eravant.com/).
При гомодинном исполнении ДПП содержит отдельные узлы передатчика и приемника, связанные с антенной через развязывающее устройство, например, циркулятор (см. фиг. 1а [46]), при этом приемник выполненный на основе квадратурного смесителя, обеспечивает на своих выходах формирование двух сигналов I(t) и Q(t), сдвинутых по фазе на 90° (см. выражения (3.6) и (3.7), стр. 106, [47]).
Пример выполнения ДПП по гомодинной схеме, представленный на фигуре 3,a, содержит СВЧ автогенератор АГ, подключенный своим высокочастотным выходом к входу первого делителя мощности ДМ-1, первый выход которого подключен к первому входу циркулятора Ц, а второй - к входу фазовращателя ФВ, при этом к третьему входу циркулятора Ц подключен вход второго делителя мощности ДМ-2, а второй вход циркулятора Ц подключен к антенне А. При этом выходы делителя мощности ДМ-2 соответственно подключены к сигнальным входам смесителей СМ-I и CM-Q, гетеродинные входы которых подключены к выходам фазовращателя ФВ, при этом квадратурные выходы I(t) и Q(t) смесителей СМ-I и CM-Q подключены к одноименным выходам ДПП. В состав ДПП могут входить дополнительные элементы, не изменяющие суть изобретения. Например, перед вторым делителем мощности ДМ-2 может быть установлен малошумящий усилитель, а между первым делителем мощности ДМ-1 и циркулятором Ц - усилитель мощности. На выходах смесителей СМ-I и CM-Q могут использоваться усилители преобразованного сигнала.
При автодинном исполнении ДПП, как отмечалось выше, функции передатчика и приемника выполняет единственный элемент - автогенератор. Для получения квадратурных сигналов в автодинном ДПП известен вариант с двумя детекторными диодами в отрезке передающей линии между автогенератором и антенной (см. рис. 9,б, [48]). Другой вариант основан на использовании, так называемого «двухдиодного автодина» (см. рис. 10, [48]), представляющего собой систему из двух взаимно синхронизированных парциальных автогенераторов при сильной связи [36, 49]. При этом регистрация сдвинутых по фазе сигналов I(t) и Q(t) производится в цепи питания этих парциальных автогенераторов (см. рис. 14, 15, 22, статьи [48]). Для уменьшения степени искажений сигналов из-за автодинных изменений частоты автодинные генераторы желательно стабилизировать посредством внешних высоко добротных резонаторов [50].
Пример выполнения ДПП по автодинной схеме представлен на фиг. 3,б. Данный ДПП содержит СВЧ автогенератор АГ, подключенный своим высокочастотным выходом к входу последовательно соединенных первого СМ-I и второго CM-Q смесителей «на проход», имеющих фазовое расстояние dв между ними, кратное нечетному числу 1/8 длины волны в передающей линии, причем выход второго смесителя CM-Q предназначен для подключения антенны А, а квадратурные выходы I(t) и Q(t) смесителей СМ-I и CM-Q подключены к одноименным входам и выходам ДПП. В состав ДПП, выполненных по автодинной схеме, могут входить дополнительные элементы, не изменяющие суть изобретения. Например, на выходах смесителей СМ-I и CM-Q могут использоваться усилители преобразованного сигнала.
БОДС (см. фиг. 1) может быть реализован по любому из вариантов, рассмотренных выше аналогов и прототипа. Рассмотрим принцип действия предлагаемого устройства на конкретном примере БОДС прототипа, описание которого опубликовано в [51].
БОДС содержит следующие основные узлы (см. фиг. 4): двухканальный фильтр 1 верхних частот (ДК ФВЧ) с управляемой частотой среза; двухканальный компаратор 2 с гистерезисом; фазовый компаратор 3 определения направления движения; обнаружитель 4 пропадания сигнала; следящий фильтр 5 на основе системы частотно-фазовой автоподстройки частоты (ЧФАПЧ); обнаружитель 6 захвата следящего фильтра; переключатель 7 сигналов; частотный компаратор 8; шины 9 и 10 выходных данных (ШВД).
ДК ФВЧ 1 предназначен для подавления низкочастотных сигналов, вызванных вертикальным перемещением транспорта на скоростях выше 20 км/ч. Может быть выполнен на микросхемах операционных усилителей по схеме универсального перестраиваемого активного фильтра с регулировкой частоты и добротности [https://vpayaem.ru/inf_filter_universal.html]. При этом для изменения частоты среза фильтров сопротивление переменных резисторов РЗ (см. рис. 1 ссылки в Интернет) можно переключать с помощью аналоговых коммутаторов (см. рис. 2.27, стр. 229, [52]).
Двухканальный компаратор 2 с гистерезисом предназначен для формирования из входных квазигармонических доплеровских сигналов I(t) и Q(t), превышающих значение заданного порогового уровня, импульсных сигналов прямоугольной формы. При этом фронт и срез этих импульсов соответствует моментам перехода сигналами нулевого уровня. Гистерезис компаратора необходим для исключения многократного срабатывания из-за шумов. Каждый из компараторов в двухканальном компараторе 2 с гистерезисом может быть выполнен на трех микросхемах операционных усилителей по схеме, представленной на рис. 6.4 стр. 115, [53].
Фазовый компаратор 3 предназначен для определения направления движения. Он может быть выполнен на одном D-триггере микросхемы (см. рис. 1.50, стр. 73, [52]).
Обнаружитель 4 пропадания сигналов предназначен для определения моментов времени, в течение которых наблюдается уменьшение уровня сигнала ниже заданного и выдачи соответствующих команд для перевода фазового компаратора 3, следящего фильтра 4 и обнаружителя захвата в режим «памяти» по частоте. Может быть выполнен согласно структурной схемы обнаружителя, представленной на рис. 3.10 на стр. 147, [54].
Следящий фильтр 5 служит для выделения энергетически средней частоты спектра принятого сигнала и восстановления сигнала при его пропадании на время до 4 с. Основой следящего фильтра является система ЧФАПЧ. Эта система содержит генератор, управляемый напряжением (ГУН), частотно-фазовый детектор (ЧФД) и цепь обратной связи, состоящей из интегратора и корректора частотной характеристики. Структурная схема, принцип действия и порядок расчета основных компонентов системы ЧФАПЧ изложены, например, на стр. 282-287, [52].
Обнаружитель 6 при вхождении в синхронизм следящего фильтра 5 с входным сигналом вырабатывает сигнал управления для коммутатора 7. Обнаружитель может быть выполнен на логическом элементе «исключающее ИЛИ» (см. рис. 1.40, стр. 62, [52]).
Переключатель 7 сигналов предназначен для подачи на выход БОДС сигнала со следящего фильтра 5 или минуя его в зависимости от наличия захвата системы ЧФАПЧ. Переключатель 7 может быть выполнен на микросхемах коммутаторов аналоговых и цифровых сигналов (см. стр. 228-232, [52]).
Частотный компаратор 8 предназначен для грубого определения частоты входного сигнала с целью выделения двух диапазонов работы БОДС (в пределах до 20 км/ч и более 20 км/ч) и выдачи команд управления на ДК ФВЧ 1. Может быть выполнен, например, по схеме счетного частотного детектора (еще, так называемого, частотно-импульсного детектора) на основе последовательно соединенных формирователя однополярных импульсов неизменной длительности и фильтра нижних частот (см. рис. 8.17, б на стр. 195, [55]).
Входы I(t) и Q(t) квадратурных сигналов БОДС подключены к входам ДК ФВЧ 1, выходы которого подключены к входам двухканального компаратора 2, при этом первый и второй выходы двухканального компаратора 2 подключены к входам фазового компаратора 3 определения направления движения, а третий выход - к обнаружителю 4 пропадания сигнала, выход которого подключен к входам управления фазового компаратора 3 и следящего фильтра 5 на основе системы ЧФАПЧ, причем второй выход двухканального амплитудного компаратора 2 дополнительно подключен к сигнальному входу следящего фильтра 5 и первому сигнальному входу переключателя 7 сигналов, при этом сигнальный выход следящего фильтра 5 подключен ко второму входу переключателя 7 сигналов, а выход синхронизации следящего фильтра 5 подключен к обнаружителю 6 захвата, выход которого подключен к управляющему входу переключателя 7 сигналов, при этом выход переключателя 7 сигналов подключен к входу частотного компаратора 8, выход которого подключен к управляющему входу ДУ ФВЧ, причем выход фазового компаратора 3 подключен к шине 9, а выход переключателя 7 сигналов - к шине 10 выходных данных.
Устройство радиолокационного измерения параметров движения наземного транспортного средства относительно подстилающей поверхности, выполненное в соответствие с предложенным способом работает следующим образом.
После подачи напряжения питания на устройство (см. фиг. 1) в автогенераторе АГ (см. фиг. 3,а) возбуждаются СВЧ колебания, которые, пройдя через первый делитель мощности ДМ-1 и циркулятор Ц, направляются в антенну А в виде зондирующего радиосигнала uзонд(t) с амплитудой Uзонд колебаний:

где
uзонд(t) - мгновенные значения зондирующего радиосигнала;
Uзонд - амплитуда зондирующего радиосигнала;
 - круговая частота зондирующего радиосигнала;
- круговая частота зондирующего радиосигнала;
ϕ0 - случайная начальная фаза зондирующего радиосигнала.
В антенне А СВЧ колебания (11) распределяются равномерно по поверхности и излучаются под одним и тем же углом 8 в пространство, где находится подстилающая поверхность. Часть мощности радиосигнала автогенератора АГ со второго выхода первого делителя мощности ДМ-1, пройдя через квадратурный фазовращатель ФВ, делится поровну и поступает на смесители СМ-I и CM-Q в качестве гетеродинных сигналов с относительной разностью фаз π/2 Эти сигналы назовем «прямыми» (индекс «прм»), в общем виде они записываются как

где
 - мгновенные значения «прямых» радиосигналов;
- мгновенные значения «прямых» радиосигналов;
Uпрм - амплитуда «прямых» радиосигнала;
 - круговая частота зондирующего радиосигнала;
- круговая частота зондирующего радиосигнала;
ϕ0 - случайная начальная фаза зондирующего радиосигнала.
От имеющихся на подстилающей поверхности неоднородностей часть мощности излучения отражается и принимается антенной А в виде совокупности N парциальных радиосигналов. Вследствие перемещения устройства относительно поверхности дороги парциальные радиосигналы имеют доплеровское смещение частоты. Поскольку угол θ облучения всех лучей одинаков, то доплеровское смещение парциальных радиосигналов имеет одну и ту же величину Ωд. Совокупность этих парциальных радиосигналов проходит через циркулятор Ц, делится по мощности поровну вторым делителем мощности ДМ-2 и поступают на сигнальные входы первого и второго смесителей СМ-I и CM-Q соответственно (см. фиг. 3,a). Выражение для этих радиосигналов запишем в виде:

где
uотр.1(t), uотр.2(t) - мгновенные значения отраженных радиосигналов на сигнальных входах первого СМ-I и второго CM-Q смесителей соответственно;
Uзонд - амплитуда зондирующего радиосигнала;
Гn - нормированный относительно Uзонд (безразмерный) коэффициент, характеризующий ослабления амплитуды излучаемого сигнала по пути распространения до n-ой неоднородности и обратно, приведенный к порту антенны А;
 - круговая частота зондирующего радиосигнала;
- круговая частота зондирующего радиосигнала;
 - частота доплеровского смещения;
- частота доплеровского смещения;
ϕ0 - случайная начальная фаза зондирующего радиосигнала;
ϕn - случайный фазовый сдвиг отраженного радиосигнала, связанный с различием расстояния до n-ой неоднородности и ее отражающих свойств;
N - количество неоднородностей на облучаемой поверхности;
Vтс - скорость транспортного средства;
с - скорость распространения электромагнитного излучения;
θ - угол облучения подстилающей поверхности.
В результате нелинейного взаимодействия прямых (12), (13) и отраженных (14) колебаний в смесителях СМ-I и CM-Q происходит преобразование сигналов в область низких доплеровских частот. При этом на выходах I(t) и Q(t) смесителей эти сигналы имеют разность фаз ±90°, причем знак этой разности зависит от направления движения транспортного средства. Выражения для преобразованных сигналов имеют вид:
где
 - мгновенные значения преобразованных сигналов на сигнальных выходах первого СМ-I и второго CM-Q смесителей соответственно;
- мгновенные значения преобразованных сигналов на сигнальных выходах первого СМ-I и второго CM-Q смесителей соответственно;
kпр - коэффициент преобразования смесителей СМ-I и CM-Q по напряжению, полагая, что эти смесители имеют идентичные параметры;
Uзонд - амплитуда зондирующего радиосигнала;

 - приведенный к порту антенны А нормированные относительно Uзонд коэффициенты, характеризующие ослабление амплитуды излучаемого сигнала по пути распространения до n-ой неоднородности и обратно, а также отражающие свойства этой неоднородности для синфазной и квадратурной составляющих радиосигнала соответственно;
- приведенный к порту антенны А нормированные относительно Uзонд коэффициенты, характеризующие ослабление амплитуды излучаемого сигнала по пути распространения до n-ой неоднородности и обратно, а также отражающие свойства этой неоднородности для синфазной и квадратурной составляющих радиосигнала соответственно;
Ωд - частота доплеровского смещения;
 - случайные фазовые сдвиги отраженного радиосигнала, связанные с расстоянием до n-ой неоднородности и ее отражающих свойств;
- случайные фазовые сдвиги отраженного радиосигнала, связанные с расстоянием до n-ой неоднородности и ее отражающих свойств;
 - синфазная и ортогональная составляющие собственных шумов смесителей и шумов СВЧ генератора, преобразованных на выходы смесителей СМ-I и CM-Q.
- синфазная и ортогональная составляющие собственных шумов смесителей и шумов СВЧ генератора, преобразованных на выходы смесителей СМ-I и CM-Q.
Отметим, что начальная фаза ϕ0 в (15), (16) отсутствует, так как при преобразовании сигналов она вычитается.
Вторые слагаемые 
 в (15) и (16) отображают результат преобразования собственных шумов смесителей СМ-I и CM-Q и шумов СВЧ генератора. Эти шумовые составляющие
в (15) и (16) отображают результат преобразования собственных шумов смесителей СМ-I и CM-Q и шумов СВЧ генератора. Эти шумовые составляющие 
 на выходах смесителей СМ-I и CM-Q представляют собой независимые стационарные нормальные процессы с нулевым средним значением. Взаимная корреляция этих составляющих отсутствует. Присутствие этих шумов выражается в шумовой модуляции сигналов I(t) и Q(t) на выходах смесителей СМ-I и CM-Q. В реальных условиях устройство функционирует при отношении сигнал-шум значительно больше единицы. Поэтому влиянием шумовых составляющих
на выходах смесителей СМ-I и CM-Q представляют собой независимые стационарные нормальные процессы с нулевым средним значением. Взаимная корреляция этих составляющих отсутствует. Присутствие этих шумов выражается в шумовой модуляции сигналов I(t) и Q(t) на выходах смесителей СМ-I и CM-Q. В реальных условиях устройство функционирует при отношении сигнал-шум значительно больше единицы. Поэтому влиянием шумовых составляющих  и
и  на работу устройства можем пренебречь.
на работу устройства можем пренебречь.
Первые слагаемые в (15) и (16) представляют собой сумму квазигармонических парциальных колебаний, имеющих одну и туже частоту Ωд. При этом амплитуды и начальные фазы этих колебаний являются случайными функциями, зависящими от отражательных способностей и относительного расстояния до облучаемых неоднородностей подстилающей поверхности. В процессе перемещения транспортного средства картина облучаемых неоднородностей постоянно изменяется. Поэтому эти колебания подвергаются одновременной модуляции амплитуды и фазы независимыми случайными процессами. Многочисленные экспериментальные исследования сигналов, отраженных от земной поверхности (см. раздел 6.2, стр. 156-159, [56]), показывают, что в подавляющем большинстве случаев распределение амплитуды сигналов подчиняется закону Релея. Тогда как начальные фазы 
 этих колебаний обычно задаются величиной, равновероятной в интервале от минус π до π (см. раздел 6.1, стр. 148-155, [56]).
этих колебаний обычно задаются величиной, равновероятной в интервале от минус π до π (см. раздел 6.1, стр. 148-155, [56]).
Результирующие сигналы (15) и (16) на выходах I(t) и Q(t) смесителей являются суммой очень большого числа перекрывающихся, расположенных случайным образом на оси времени парциальных сигналов, полученных от неупорядоченных неоднородностей облучаемой поверхности. Эти сигналы представляют собой стационарный эргодический случайный процесс, для которого справедлива центральная предельная теорема. Содержание этой теоремы сводится к следующему: распределение суммы достаточно большого числа случайных, взаимно независимых слагаемых, среди которых нет доминирующих, близко к нормальному и стационарному процессу независимо от законов распределения отдельных слагаемых. В соответствие с этой теоремой и результатами анализа распределения плотности вероятности суммы гармонических колебаний со случайными фазами, выполненного в [57-59], следует важный вывод, что при суммировании достаточно большого числа гармонических колебаний не только со случайными начальными фазами, но и с различными близкими частотами получается процесс не только стационарный, но и эргодический. Показано также, что плотность вероятности результирующего колебания не зависит от частоты, (см. стр. 163-167, [57] и стр. 272-277, [58]). Кроме того, установлено, что результирующий процесс флуктуаций является достаточно узкополосным процессом, который может быть представлен в виде синусоидального колебания, случайно модулированного по амплитуде и фазе (см. стр. 173-186, [59]).
Таким образом, суммы квазигармонических парциальных колебаний со случайным распределением начальных фаз в (15) и (16) представляют собой квадратурные гармонические колебания доплеровской частоты Ωд, амплитуды и фазы которых являются медленно меняющимися функциями времени. Выражения для этих колебаний на выходах I(t) и Q(t) смесителей СМ-I и CM-Q запишем в виде:

где
 - мгновенные значения преобразованных сигналов на
- мгновенные значения преобразованных сигналов на
сигнальных выходах первого СМ-I и второго CM-Q смесителей соответственно;
 - результирующие медленно меняющиеся амплитуды сигналов, преобразованных смесителями СМ-I и CM-Q соответственно;
- результирующие медленно меняющиеся амплитуды сигналов, преобразованных смесителями СМ-I и CM-Q соответственно;
Ωд - частота доплеровского смещения;
 - результирующие медленно меняющиеся фазы сигналов, преобразованных смесителями СМ-I и CM-Q соответственно.
- результирующие медленно меняющиеся фазы сигналов, преобразованных смесителями СМ-I и CM-Q соответственно.
Сигналы (17) и (18) с выходов I(t) и Q(t) смесителей СМ-I и CM-Q (см. фигуру 3), поступающие в БОДС (см. фигуру 4), проходят по двум идентичным каналам через фильтры 1 верхних частот, амплитудные компараторы 2, где они формируются в сигнал в виде меандра и подаются на фазовый компаратор 3, выполненный на D-триггере. Состояние триггера указывает на направление движения: вперед или назад. Для повышения точности измерения параметров движения в БОДС используется следящий фильтр 5, выполненный на основе ЧФАПЧ и обеспечивающий, в случае пропадания сигналов, их восстановление на время до 4 с. Данного времени достаточно для успешного преодоления залитых водой участков пути или покрытых листовой сталью железнодорожных переездов, когда эхо-сигнал из-за зеркального отражения излучения пропадает.
Перевод следящего фильтра 5, а также фазового компаратора 3 в режим «память» производится с помощью обнаружителя 4 пропадания сигнала. Подключение следящего фильтра 5 осуществляется через коммутатор 7 с помощью обнаружителя 6 захвата. Для подавления низкочастотных помех, обусловленных качкой локомотива при высоких скоростях движения, производится переключение частоты среза ФВЧ 1 с помощью частотного компаратора 8. Информация о моменте начала движения локомотива, направлении движения, а также меандр, частота первой гармоники которого прямо пропорциональна скорости движения, поступают в систему автоматизированного управления торможением поезда по ШВД 9 и 10.
Предлагаемый способ был реализован в виде действующего макета радиолокационного измерителя скорости движения, предназначенного для системы автоматизированного управления железнодорожным локомотивом. Устройство выполнено на основе планарной антенны (см. фиг. 2) дифракционного излучения 8-мм диапазона и автодинного ДПП на основе двух связанных СВЧ генераторов на диодах Ганна (см. рис. 1, [49]). Частота генерации 37,5 ГГц автодинного ДПП стабилизирована дополнительным высокодобротным резонатором (см. рис. 2, б, [49]), связанным с рабочим резонатором по схеме на отражение с резистивной связью. Резонатор изготовлен из суперинвара, работает на волне Нои, имеет собственную добротность порядка 5×103. Регистрация квадратурных доплеровских сигналов производилась в цепи питания СВЧ генераторов посредством электронных схем, выполненных на основе двух операционных усилителей и транзистора (см. рис. 4, [49]). Потенциал ДПП в полосе доплеровских частот 0,05…20 кГц получен порядка 85…90 дБ.
Полотно антенны предлагаемого измерителя устанавливалось под днищем автомобильного прицепа на высоте 0,3 м от уровня дороги. Угол излучения антенны 45°. Характерный фрагмент записи сигнала, полученного при движении автомобиля с прицепом по грунтовой дороге со скоростью 30 км/ч (по спидометру), представлен на фиг. 5,a. Из записи видно, что сигнал подвержен амплитудным флуктуациям глубиной до 50%, но при этом его частота остается практически постоянной. Следящий фильтр БОДС после захвата частоты сигнала работал устойчиво без срывов слежения.
На фиг. 5,б представлен для сравнения типичный для антенн с расходящимся лучом фрагмент доплеровского сигнала, приведенного в [6] на фиг. 7. Частота излучения альтернативного измерителя скорости составляет 24,1 ГГц, угол наклона луча 30°, его ширина расхождения 10°. Сигнал получен для обычной поверхности земли при движении трактора со скоростью около 1 км/ч. Запись сигнала полностью соответствует описанным выше явлениям, которые сопровождают разброс доплеровских частот. Этот разброс вызывает не только ошибку измерения скорости, но также изменения амплитуды (так называемые, замирания) доплеровского сигнала и затрудняет измерения скорости.
На фиг. 5,в представлен фрагмент записи доплеровского сигнала, полученного от поверхности дороги, имитирующей наличие периодических неоднородностей. На участке дороги поперек пути движения автомобиля с интервалом 0,55 м были прикопаны заподлицо полками вверх несколько отрезков стального П-образного швеллера 100×50 мм. Из записи видно, что амплитуда сигнала периодически меняется. На участках с пониженной амплитудой сигнала в поле излучения антенны находился один швеллер. На участке, где амплитуда возрастает примерно в полтора раза, в поле излучения антенны находились одновременно два швеллера. Полученные результаты подтвердили описанную выше гипотезу о работоспособности предлагаемого устройства на железнодорожном мосту с просветами между шпалами. Необходимо отметить значительное увеличение амплитуды сигналов в данном случае по сравнению со случаем отсутствия швеллеров на дороге, что уменьшает влияние собственных шумов устройства на точность измерения скорости. Этими результатами эксперимента подтверждается также достижение цели известного устройства [18] - повышение надежности измерения скорости при использовании сигналов, полученных от шпал железнодорожного пути.
Таким образом, предлагаемые способ и устройство благодаря формированию плоского фазового фронта по всему сечению луча в ближней зоне излучения антенны обеспечивают по сравнению с аналогами и прототипом получение от неоднородностей подстилающей поверхности совокупность большого числа парциальных сигналов, имеющих практически одну доплеровскую частоту. При этом результирующие сигналы на квадратурных выходах I(t) и Q(t) смесителей СМ-I и CM-Q обеспечивают повышенную точность измерения скорости и сохранение функциональной возможности прототипа - определение направления движения. Кроме того, при использовании длины апертуры антенны более расстояния между характерными неоднородностями полотна дороги повышается надежность измерений в условиях пропадания сигналов. Кроме того, сужение спектра доплеровского сигнала сокращает время, необходимое для выполнения измерения скорости перемещения [6].
В заключение отметим, что новые возможности предлагаемых способа и устройства позволяют создать прецизионные измерители параметров движения, которые весьма востребованы в последнее время на автомобильном и железнодорожном транспорте в связи с активным развитием беспилотных и высокоскоростных технологий.
Источники информации:
1. Кошелев Ю.Д. Доплеровский автодинный измеритель скорости // Электронная техника. Серия. Контрольно-измерительная аппаратура. 1966. Вып.3. С. 99-108.
2. Hyltin Т.М., Fuchser T.D., Tyson Н.В., Regueiro W.R. Vehicular radar speedometer // Sae Paper, 1973. No. 730125. 36 p.
3. Гримс Д.М., Джонс Т.О. Автомобильный радиолокатор: краткий обзор // ТИИЭР. 1974. Т. 62. №6. С. 185-209.
4. Ветлинский В.Н. Автомобильные радиолокационные станции // Зарубежная радиоэлектроника. 1978. №10. С. 51-70.
5. Stuchly S.S., Thansandote A., Mladek J., Townsend J. A Doppler radar velocity meter for agricultural tractors // IEEE Transactions on Vehicular Technology. 1978. V. 27. No. 1. P. 24-30.
6. Egawa A. A microwave Doppler radar velocity meter for construction machinery // SAE Technical Paper Series, 1982. No. 821083. 20 p.
7. Малорацкий Л.Г. Радарные измерители скорости машинно-тракторных агрегатов // Зарубежная радиоэлектроника. 1986. №7. С. 84-91.
8. Хаблов Д.В. Применение сверхвысокочастотных доплеровских датчиков перемещения в антиблокировочной тормозной системе // Измерительная техника. 2021. №2. С. 43-48.
9. Вериго A.M., Кузнецов Н.Н., Колесниченко Ю.Н., Подоров Н.П. Тенн Ф.А. Доплеровский измеритель параметров движения подвижного состава // Автоматика, телемеханика и связь. 1984. №2. С. 12-14.
10. Григорин-Рябов В.В., Вериго A.M., Шелухин О.И., Шелухин В.И. Радиотехнические железнодорожные устройства. - М.: Транспорт, 1986. - 161 с.
11. Использование радара для измерения пройденного пути и скорости // Железные дороги мира. 2000. №10. С. 51-56.
12. Финкельштейн М.И. Основы радиолокации. - М.: Радио и связь, 1983. - 536 с.
13. Патент US 4012736 A, 15.03.1977. Int. Cl.2 G01S 9/44. Radar speedometer / J.H. Angwin.
14. Патент US 4231039 A, 28.10.1980. Int. Cl.2 G01S 9/44. Radar speedometer / J.D.F. Vail, J.L. Witler.
15. Патент US 4316173 A, 16.02.1982. Int. Cl.3 G08G 29/00. Doppler radar vehicle speed sensing system including means for checking system operation based on the detection of low frequency Doppler frequency components / A. Matsumura, A. Endo, K. Sekine.
16. Patent USA US 4356489 A, 26.10.1982. Int. Cl.3 G01S 13/93. Vehicle speed sensing apparatus with electromagnetic wave interference detector / Y. Hirota, A. Endo, K. Sekine.
17. Патент US 4527160 A, 02.07.1985. Int. Cl.3 G01S 13/60. Doppler radar type speedometer / A. Endo, K. Kimura.
18. Патент JPS 58206991 A, 02.12.1983. Int. Cl.3 G01S 13/60. Ground speed detecting device for vehicle / H. Nakatsuka.
19. Патент US 4920345 A, 24.04.1990. Int. Cl.5 G01S 13/60. Device operating on the Doppler principle to determine the distance traveled by a vehicle / E. Lissel, R. Holze.
20. Патент US 5016017 A, 14.05.1991. Int. Cl.5 G01S 13/60. Doppler radar speed detecting method and apparatus therefore / M. Kodera, K. Sasaki, S. Mikami, J. Utsu.
21. Патент US 6230107 B1, 08.05.2001. Int. Cl.7 G01P 21/00. Vehicle speed detection system / S. Yamamoto, H. Nagase, Y. Kitahara.
22. Авт. свид. СССР SU 1341594 A1, 30.09.1987, бюл. 36. МПК4 G01S 13/58. Радиолокационный измеритель скорости для железнодорожного транспорта / Ю.П. Кернов.
23. Патент US 6703966 B2, 09.03.2004. Int. Cl.7 G01S 13/58. Method and device for measuring the speed of a moving object / Corbrion C., Lewiner J., Ditchi Т., Carreel E.
24. Патент US 9500747 B2, 22.11.2016. Int. Cl.(2006) G01S 13/93. Travel distance measurement device / K. Inomata, W. Tsujita, K. Tahara, S. Nagashima.
25. Патент US 4788553 A, 29.11.1988. Int. Cl.4 H01Q 13/00. Doppler radar velocity measurement apparatus / O.A. Phillips.
26. Патент US 4660050 A, 21.04.1987. Int. Cl.4 H01Q 1/32. Doppler radar velocity measurement horn / O.A. Phillips.
27. Авт. свид. СССР SU 1829105 A1, 23.07.1993, бюл. 27. МПК4 G01S 13/60. Датчик измерителя скорости транспортного средства и автодинный преобразователь / С.Д. Якухин, Г.А. Енютин, С.А. Маслов, В.Т. Коновалов.
28. Патент US 7310061 B2, 18.12.2007. Int. Cl.7 G01S 13/58. Velocity sensor and ground vehicle velocity sensor using the same / T. Nagasaku, H. Kondoh, H. Shinoda.
29. Патент US 7532153 B2, 12.05.2009. Int. Cl.(2006) G01S 13/58. Velocity sensor and ground vehicle velocity sensor using the same / T. Nagasaku, H. Kondoh, H. Shinoda.
30. Патент DE 2237139 C2, 29.04.1982. Int. Cl.3 G01S 13/60. Doppler radar for vehicle speed measurement - has underbody hollow conductor antenna with longitudinal slot aperture / G. Horst, D. Juergen, S. Wolf-D.
31. Патент DE 2344627 A1, 07.08.1975. Int. Cl.2 H01Q 13/20, G01S 9/44. Speed measuring device for vehicles and aircraft - using Doppler shift of electromagnetic waves, uses waveguide / G. Horst.
32. Патент DE 2714365 C2, 05.07.1984. Int. Cl.2 G01S 13/62. Mobile Doppler radar station - has two mixers whose Doppler frequencies are used to determine relative motion of station w.r.t. target / L. Kurt, W. Werner.
33. Патент FR 2560389 B1, 13.11.1987. Int. Cl.2 G01S 13/60. Differential microwave device for non-contact measurement of the speed of a terrestrial vehicle / Jean-Louis Vaterskowski, Jean-Claude Van De Velde
34. Патент US 5204682 A, 20.04.1993. Int. Cl.5 G01S 13/60. Doppler radar speed sensor / P.D.L. Beasley
35. Keller В., Meinel H., Rembolt B. Vsb-Radar - a 35 GHz Doppler Radar for Velocity Distance and Acceleration Measurements on Railboand Vehicles // 8-th Eur. Microwave Conf. Paris, 1978. P. 598-612.
36. Носков В.Я., Варавин A.B., Васильев A.B., Ермак Г.П., Закарлюк H.М., Игнатков К.А., Смольский С.М. Современные гибридно-интегральные автодинные генераторы микроволнового и миллиметрового диапазонов и их применение. Часть. 9. Радиолокационное применение автодинов // Успехи современной радиоэлектроники. 2016. №3. С. 32-86.
37. Воскресенский Д.И., Гостюхин В.Л., Максимов В.М., Пономарев Л.И. Устройства СВЧ и антенны / Под ред. Д.И. Воскресенского. - М.: Радиотехника, 2006. - 376 с.
38. Устройства СВЧ и антенны. Проектирование фазированных антенных решеток: Учеб. пособие для вузов / Под ред. Д.И. Воскресенского. - М.: Радиотехника, 2012. - 744 с.
39. Патент GB 2235587 A, 06.03.1991. Int. Cl.5 H01Q 21/00. Janus antenna arrangement / Е. Lissel.
40. Евдокимов А.П., Крыжановский В.В., Сиренко Ю.К. Планарная антенна дифракционного излучения КВЧ-диапазона // Электромагнитные волны и электронные системы. 2011. №6. С. 53-60.
41. Останков А.В., Степанов А.Е. Методика расчета частотно-сканирующей антенны вытекающей волны дифракционного типа // Вестник Воронежского государственного технического университета. 2012. Т. 8. №7-1. С. 133-139.
42. Евдокимов А.П. Антенны дифракционного излучения // Физические основы приборостроения. 2013. Т. 2. №1. С. 108-125.
43. Патент US 6597323 B2, 22.07.2003. Int. Cl.7 H01Q 13/00. Dielectric leaky wave antenna haying mono-layer structure / T. Teshirogi, et all.
44. Патент RU 2449435 C1, 27.04.2012, бюл. 12. МПК(2006) H01Q 13/00. Плоская решетка антенн дифракционного излучения и делитель мощности, используемый в ней / Е.В. Петров, С.М. Кустов, М.С. Захаров.
45. Noskov V.Ya., Shaidurov K.D. Near-Held modeling of the leaky-wave antenna // 2020 Ural Symposium on Biomedical Engineering, Radioelectronics and Information Technology (USBEREIT), 2020, (14-15 May 2020), Yekaterinburg, Russia, 2020, 9117779, p. 277-280.
46. Патент US 4499467, 12.02.1985, Int. Cl.4 G01S 13/62. Doppler radar sets with target direction sensing capability / Rittenbach.
47. Сколник M. Введение в технику радиолокационных систем. М.: Мир, 1965.
48. Носков В.Я., Смольский С.М., Игнатков К.А. и др. Современные гибридно-интегральные автодинные генераторы микроволнового и миллиметрового диапазонов и их применение. Часть 11. Основы реализации автодинов. Успехи современной радиоэлектроники. 2019. №2. С. 5-33.
49. Носков В.Я. Двухдиодный автодинный приемопередатчик // Приборы и техника эксперимента. 2015. №4. С. 65-70.
50. Носков В.Я., Игнатков К.А., Смольский С.М. Современные гибридно-интегральные автодинные генераторы микроволнового и миллиметрового диапазонов и их применение. Часть 8. Авто дины со стабилизацией частоты внешним высокодобротным резонатором // Успехи современной радиоэлектроники. 2013. №12. С. 3-42.
51. Бузыкин В.Т., Веснин В.А., Красильников Ю.Л., Носков В.Я. Радиолокационный измеритель параметров движения на базе двухдиодного автодина // В сб.: Радиолокационные методы в научных исследованиях, народном хозяйстве и медицине: Тез. докл. - Каменск Уральский, 1989. - С. 97-99.
52. Шило В.Л. Популярные цифровые микросхемы. Справочник. - М.: Радио и связь, 1989. - 352 с.
53. Щербаков В.И., Грездов Г.И. Электронные схемы на операционных усилителях: Справочник. К.: Техника, 1983. - 213 с.
54. Информационные технологии в радиотехнических системах / В.А. Васин, И.Б. Власов, Ю.М. Егоров и др.; Под ред. И.Б. Федорова. - М.: Изд-во МГТУ им. Н.Э. Баумана, 2004. - 768 с.
55. Устройства приема и обработки сигналов / Под ред. профессора B.C. Плаксиенко. М.: Уч.-метод., издат. центр «Учебная литература», 2004. - 376 с.
56. Зубкович С.Г. Статистические характеристики радиосигналов, отраженных от земной поверхности. М.: Советское радио, 1968. - 224 с.
57. Гоноровский И.С.Радиосигналы и переходные явления в радиоцепях. - М.: Связьиздат, 1954. - 326 с.
58. Гоноровский И.С. Радиотехнические цепи и сигналы. - М.: Советское радио, 1977. - 608 с.
59. Бунимович В.И. Флюктуационные процессы в радиоприемных устройствах. М.: Советское радио, 1951. - 361 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ ДЛЯ ОБНАРУЖЕНИЯ ЦЕЛЕЙ И ИЗМЕРЕНИЯ ИХ ПАРАМЕТРОВ ДВИЖЕНИЯ В ЗОНЕ СЕЛЕКЦИИ И РАДИОЛОКАЦИОННЫЙ ДАТЧИК ЕГО РЕАЛИЗУЮЩИЙ | 2021 |
|
RU2783402C1 |
| СПОСОБ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИИ И УСТРОЙСТВО С АВТОДИННЫМ ПРИЁМОПЕРЕДАТЧИКОМ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2803413C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТОВ ЛОКАЦИИ В РАДИОЛОКАЦИОННЫХ ДАТЧИКАХ С ЧАСТОТНОЙ МАНИПУЛЯЦИЕЙ НЕПРЕРЫВНОГО ИЗЛУЧЕНИЯ РАДИОВОЛН И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2695799C1 |
| СПОСОБ И УСТРОЙСТВО РАДИОЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2023 |
|
RU2805901C1 |
| СПОСОБ ФИКСАЦИИ МОМЕНТА ОТДЕЛЕНИЯ ОТЦЕПА ОТ СОСТАВА И РАДИОЛОКАЦИОННЫЙ ДАТЧИК ЕГО РЕАЛИЗУЮЩИЙ (ВАРИАНТЫ) | 2023 |
|
RU2815559C1 |
| СПОСОБ ПОВЫШЕНИЯ ПОМЕХОУСТОЙЧИВОСТИ РАДИОЛОКАЦИОННЫХ ДАТЧИКОВ С ПЕРЕКЛЮЧЕНИЕМ ЧАСТОТЫ | 2020 |
|
RU2756789C2 |
| СПОСОБ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИИ И УСТРОЙСТВО С АВТОДИННЫМ ПРИЁМОПЕРЕДАТЧИКОМ ДЛЯ КОНТРОЛЯ ДВУХ ЗОН СЕЛЕКЦИИ ЦЕЛИ ПО ДАЛЬНОСТИ | 2023 |
|
RU2822284C1 |
| СПОСОБ ДОПЛЕРОВСКОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА И РАДИОЛОКАЦИОННАЯ СИСТЕМА ЕГО РЕАЛИЗУЮЩАЯ | 2023 |
|
RU2808775C1 |
| РАДИОФОТОННАЯ СИСТЕМА ЛОКАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ СКОРОСТИ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2023 |
|
RU2812744C1 |
| РАДИОФОТОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ СКОРОСТИ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2023 |
|
RU2834080C1 |

Предлагаемая группа изобретений относится к области ближней радиолокации непрерывного излучения и может быть использована в системах автоматизированного управления транспортных средств, в том числе беспилотных, в локомотивных устройствах безопасности и управления, в частности в устройствах регистрации параметров движения и контроля скоростного режима ведения поезда, а также в устройствах контроля скорости иных наземных транспортных средств. Техническим результатом изобретения является повышение точности и надежности измерения скорости движения наземных транспортных средств относительно дорожного полотна путем улучшения качества доплеровских сигналов за счет усовершенствования антенной системы. Повышение точности измерений достигается за счет формирования в ближней зоне антенны плоского фазового фронта излучения по всему его сечению. При этом повышение надежности измерений обеспечивается благодаря применению протяженной антенны в направлении движения транспортного средства. 2 н. и 7 з.п. ф-лы, 5 ил.
1. Способ радиолокационного измерения параметров движения наземного транспортного средства относительно подстилающей поверхности, включающий генерацию высокочастотных зондирующих колебаний, преобразование этих колебаний в зондирующие электромагнитные радиоволны с равномерным распределением их амплитуды по продольной оси апертуры антенны, излучение этих радиоволн под острым углом к подстилающей поверхности с формированием плоского фазового фронта по продольной оси апертуры антенны, причем проекция нормали к плоскости фазового фронта на подстилающую поверхность совпадает или противоположна с вектором скорости транспортного средства, облучение подстилающей поверхности электромагнитными радиоволнами одинаковой интенсивностью по продольной оси апертуры антенны, прием отраженных от неоднородностей и шероховатостей подстилающей поверхности парциальных радиоволн, сложение этих отраженных парциальных радиоволн и преобразование их в высокочастотные колебания отраженного радиосигнала, смешение высокочастотных колебаний отраженного радиосигнала с частью высокочастотных зондирующих колебаний, преобразование частоты полученной смеси в область низких частот, выделение из преобразованных колебаний квадратурных доплеровских сигналов и их обработку, причем по частоте доплеровских сигналов при их обработке определяют скорость движения транспортного средства, интегрированием периодов доплеровского сигнала - пройденный путь, а по разности фаз доплеровских сигналов - направление движения, отличающийся тем, что зондирующие электромагнитные радиоволны равномерно распределяются также по ширине апертуры антенны и излучаются под тем же острым углом к подстилающей поверхности, как и осевое излучение радиоволн, с формированием общего плоского фазового фронта радиоволн всей апертуры антенны, облучение подстилающей поверхности электромагнитными радиоволнами одинаковой интенсивности по всей площади облучаемой поверхности, прием отраженных от неоднородностей и шероховатостей облучаемой подстилающей поверхности парциальных радиоволн и сложение этих отраженных парциальных радиоволн с парциальными радиоволнами, полученными по оси апертуры антенны.
2. Устройство радиолокационного измерения параметров движения наземного транспортного средства относительно подстилающей поверхности, содержащее антенну наклонного излучения, подключенную к доплеровскому приемопередатчику с квадратурным преобразованием частоты, низкочастотные сигнальные выходы которого подключены к блоку обработки доплеровских сигналов, отличающееся тем, что антенна наклонного излучения выполнена прямоугольной с плоским раскрывом излучающей поверхности, которая электрически представляет собой множество равномерно распределенных излучателей высокой частоты с равной амплитудой токов возбуждения, создающих в ближней зоне антенны наклонное к ее поверхности излучение с плоским фазовым фронтом в его сечении, при этом раскрыв излучающей поверхности антенны имеет размеры ширины S и длины L не менее десяти длин волн электромагнитных колебаний, причем длина L апертуры антенны при наличии на подстилающей поверхности периодических неоднородностей используется не менее интервала между этими неоднородностями, продольная ось антенны совпадает с вектором скорости, а антенна своим плоским раскрывом излучающей поверхности закреплена на кузове транспортного средства параллельно подстилающей поверхности на высоте в соответствии с условием
где Н - высота от апертуры антенны до отражающей поверхности;
Rд.з. - радиус дальней зоны антенны;
L - продольный размер излучающей апертуры антенны;
θ - угол излучения антенны относительно ее плоскости апертуры;
λ - длина волны электромагнитного излучения.
3. Устройство по п. 2, отличающееся тем, что антенна наклонного излучения выполнена в виде прямоугольной фазированной антенной решетки с плоским раскрывом излучающей поверхности, которая по длине и ширине содержит соответственно M и N рядов излучателей, причем по ширине каждый ряд из N излучателей возбуждается синфазно, а по длине антенны между любыми из М соседними синфазно возбуждаемыми рядами излучателей фаза тока возбуждения отличается от фазы тока предыдущего ряда излучателей на одну и ту же величину ψ.
4. Устройство по пп. 2 и 3, отличающееся тем, что антенна наклонного излучения с прямоугольным плоским раскрывом излучающей поверхности выполнена в виде волноводно-щелевой, полосковой или микрополосковой фазированной антенной решетки.
5. Устройство по п. 2, отличающееся тем, что антенна наклонного излучения с прямоугольным плоским раскрывом излучающей поверхности выполнена в виде антенной решетки дифракционного излучения.
6. Устройство по п. 2, отличающееся тем, что антенна наклонного излучения с прямоугольным плоским раскрывом излучающей поверхности выполнена в виде волноводно-линзовой антенны вытекающей волны.
7. Устройство по п. 2, отличающееся тем, что доплеровский приемопередатчик с квадратурными выходами I(t) и Q(t) преобразованных сигналов выполнен по гомодинной схеме и содержит СВЧ генератор, первый и второй смесители, первый и второй делители мощности, циркулятор и фазовращатель с квадратурными выходами высокочастотных сигналов, при этом СВЧ генератор подключен своим высокочастотным выходом к входу первого делителя мощности, первый выход которого подключен к первому входу циркулятора, а второй - к входу фазовращателя, при этом к третьему входу циркулятора подключен вход второго делителя мощности, при этом выходы второго делителя мощности соответственно подключены к сигнальным входам первого и второго смесителей, гетеродинные входы которых подключены к квадратурным выходам фазовращателя, при этом квадратурные выходы I(t) и Q(t) первого и второго смесителей подключены к одноименным входам и выходам доплеровского приемопередатчика.
8. Устройство по п. 2, отличающееся тем, что доплеровский приемопередатчик с квадратурными выходами I(t) и Q(t) преобразованных сигналов выполнен по автодинной схеме и содержит СВЧ генератор.
9. Устройство по п. 2, отличающееся тем, что блок обработки доплеровский сигналов содержит двухканальный фильтр верхних частот с управляемой частотой среза, двухканальный компаратор с гистерезисом, фазовый компаратор определения направления движения, обнаружитель пропадания сигнала, следящий фильтр на основе системы частотно-фазовой автоподстройки частоты (ЧФАПЧ), обнаружитель захвата следящего фильтра, переключатель сигналов, частотный компаратор, шины выходных данных (ШВД), причем входы I(t) и Q(t) квадратурных сигналов блока обработки доплеровских сигналов подключены к входам двухканального фильтра верхних частот, выходы которого подключены к входам двухканального компаратора с гистерезисом, при этом первый и второй выходы двухканального компаратора подключены к входам фазового компаратора определения направления движения, а третий выход - к обнаружителю пропадания сигнала, выход которого подключен к входам управления фазового компаратора и следящего фильтра на основе системы ЧФАПЧ, причем второй выход двухканального амплитудного компаратора дополнительно подключен к сигнальному входу следящего фильтра и первому сигнальному входу переключателя сигналов, при этом сигнальный выход следящего фильтра подключен ко второму входу переключателя сигналов, а выход синхронизации следящего фильтра подключен к обнаружителю захвата, выход которого подключен к управляющему входу переключателя сигналов, при этом выход переключателя сигналов подключен к входу частотного компаратора, выход которого подключен к управляющему входу двухканального фильтра верхних частот, причем выход фазового компаратора и выход переключателя сигналов подключены к шинам выходных данных.
| Радиолокационный измеритель скорости для железнодорожного транспорта | 1985 |
|
SU1341594A1 |
| БЕСКОНТАКТНЫЙ СПОСОБ ИЗМЕРЕНИЯ ПРОЙДЕННОГО ПУТИ | 2018 |
|
RU2686674C1 |
| БЕСКОНТАКТНЫЙ ИЗМЕРИТЕЛЬ ПРОЙДЕННОГО ПУТИ | 2018 |
|
RU2690842C1 |
| JPS 58206991 A, 02.12.1983 | |||
| US 6703966 B2, 09.03.2004 | |||
| Станок для приготовления цементно-песочной черепицы | 1927 |
|
SU23871A1 |
| ЕВДОКИМОВ А.П | |||
| Антенны дифракционного излучения // Физические основы приборостроения | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| С | |||
| Приспособление для останова мюля Dobson аnd Barlow при отработке съема | 1919 |
|
SU108A1 |
| KELLER В., MEINEL H., REMBOLT B | |||
| Скоропечатный станок для печатания со стеклянных пластинок | 1922 |
|
SU35A1 |

