Изобретение относятся к железнодорожному транспорту и может быть использовано для управления движением на железных дорогах с высокоточным определением местоположения как элементов подвижного состава железнодорожного транспорта, так и объектов инфраструктуры железнодорожного пути.
Известно устройство радиочастотной идентификации и позиционирования железнодорожного транспорта, содержащее как минимум две радиочастотные метки, установленные на известных местах участка железнодорожного пути, и расположенный на железнодорожном транспортном средстве радиочастотный считыватель, радиочастотные метки выполнены по технологии устройств на поверхностных акустических волнах: ПАВ-меток, работающих на частоте 2,4 ГГц, радиочастотный считыватель выполнен как минимум двухканальным и с двумя приемопередающими антеннами, расположенными на днище железнодорожного транспортного средства в промежутках между его колесными парами и разнесенными по длине железнодорожного транспортного средства, пары приемопередающих антенн и соответствующие им ПАВ-метки, установленные на железнодорожном пути, расположены в параллельных плоскостях, которые в поперечном направлении железнодорожного транспортного средства наклонены к горизонту соответственно под углом 0-65° (RU 125535, B61L 25/00, 10.03.13).
Известное устройство обеспечивает повышенную достоверность и надежность идентификации радиочастотной метки, и повышенную точность позиционирования железнодорожного транспорта. Однако оно не решает задачи определения с высокой точностью в абсолютных координатах местоположения железнодорожного транспортного средства в любом месте пути его следования.
В качестве прототипа принята система радиочастотной идентификации и позиционирования железнодорожного транспорта, содержащая, по меньшей мере, две радиочастотные метки на каждом участке пути, где необходима остановка, установленные на известных местах железнодорожного пути, и устройство управления, второй вход которого соединен с выходом радиочастотного считывателя, дополнительные радиочастотные метки, установленными по пути следования железнодорожного транспортного средства по обеим сторонам железнодорожного пути со сдвигом друг относительно друга, и пунктом сбора и обработки информации, причем первая приемопередающая антенна считывателя установлена на днище железнодорожного транспортного средства, вторая и третья приемопередающие антенны установлены слева и справа на кабине машиниста соответственно, а передающая антенна установлена сверху на кабине машиниста, пункт сбора и обработки информации выполнен в виде последовательно включенных приемной антенны, усилителя высокой частоты, смесителя, второй вход которого через гетеродин соединен с выходом блока поиска, усилителя промежуточной частоты, удвоителя фазы, второго анализатора спектра, блока сравнения, второй вход которого через первый анализатор спектра соединен с выходом усилителя промежуточной частоты, порогового блока, второй вход которого через линию задержки соединен с его выходом, ключа, второй вход которого соединен с выходом усилителя промежуточной частоты, фазового детектора и компьютера, последовательно подключенных к выходу удвоителя фазы делителя фазы на два и узкополосного фильтра, выход которого соединен с вторым входом фазового детектора, при этом вход блока поиска соединен с выходом порогового блока, каждая радиочастотная метка выполнена в виде пьезокристалла с нанесенными на его поверхность алюминиевым тонкопленочным встречно-штыревым преобразователем, связанным с микрополосковой антенной, и набором отражателей, при этом встречно-штыревой преобразователь содержит две гребенчатые системы электродов, электроды каждой из гребенок соединены друг с другом шинами, связанными с микрополосковой антенной (RU 2499714, B61L 25/02, 27.11.13).
Известное техническое решение за счет использования дополнительных радиочастотных меток, размещаемых на пути следования железнодорожного транспортного средства по обеим сторонам железнодорожного пути со сдвигом друг относительно друга, пункта сбора и обработки информации и радиоканала с применением сложных ФМн-сигналов позволяет обеспечить не только прицельную остановку железнодорожных транспортных средств, но и определять направление, скорость, пройденный путь и местоположение железнодорожных транспортных средств. Недостаток этого технического решения заключается в сложности его реализации и невозможности определения с высокой точностью в абсолютных координатах местоположения железнодорожных транспортных средств.
Технический результат изобретения заключается в повышении точности определения в абсолютных координатах местоположения железнодорожного транспортного средства.
Технический результат достигается тем, что в системе определения местоположения железнодорожного подвижного состава, содержащей радиочастотные метки, размещенные на железнодорожном пути и объектах инфраструктуры, и радиочастотный считыватель, установленный на железнодорожном подвижном составе, согласно изобретению каждая шпала железнодорожного пути снабжена радиочастотной меткой, а на железнодорожном подвижном составе установлены дешифратор, микропроцессор с подключенными к нему блоком памяти, в котором записана цифровая модель пути с прилегающей инфраструктурой и информацией о размещенных на пути шпалах с их абсолютными координатами, и приемопередающим устройством, соединенным по каналу связи с приемопередающим устройством диспетчерского пункта или центра управления движением, у которых в памяти вычислительного устройства записана цифровая модель пути с прилегающей инфраструктурой и информацией о размещенных на пути шпалах с их абсолютными координатами, при этом выход радиочастотного считывателя через дешифратор подключен к входу микропроцессора, соединенного с блоком управления железнодорожного подвижного состава, и с приемопередающим устройством.
На железнодорожном подвижном составе может быть установлено не менее двух радиочастотных считывателей.
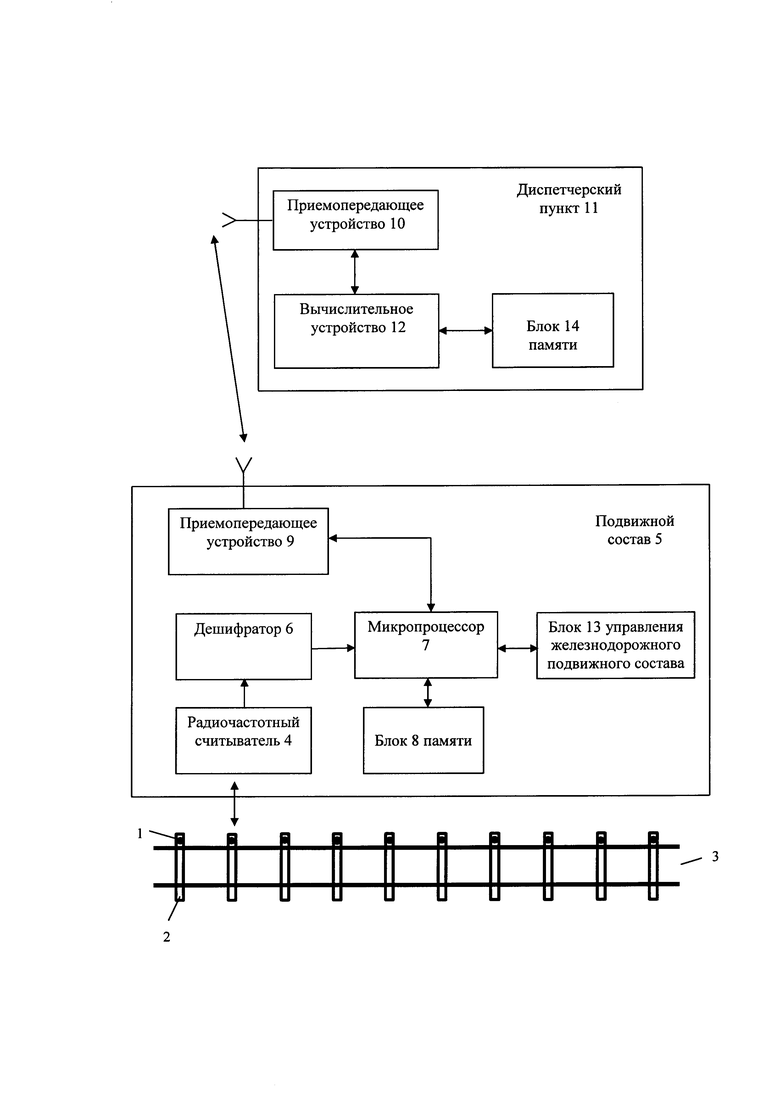
На чертеже представлена схема системы определения местоположения железнодорожного подвижного состава.
Система определения местоположения железнодорожного подвижного состава содержит радиочастотные метки 1 на каждой шпале 2 железнодорожного пути 3, и на объектах инфраструктуры (на чертеже не показано), радиочастотный считыватель 4, установленный на железнодорожном подвижном составе 5, на котором установлены дешифратор 6, микропроцессор 7 с подключенными к нему блоком 8 памяти, в котором записана цифровая модель пути 3 с прилегающей инфраструктурой и информацией о размещенных на пути шпалах 2 с их абсолютными координатами, и приемопередающим устройством 9, соединенным по каналу связи с приемопередающим устройством 10 диспетчерского пункта 11 или центра управления движением, у которых в памяти вычислительного устройства 12 записана цифровая модель пути 3 с прилегающей инфраструктурой и информацией о размещенных на пути 3 шпалах 2 с их абсолютными координатами, при этом выход радиочастотного считывателя 4 через дешифратор 6 подключен к входу микропроцессора 7, соединенного с блоком 13 управления железнодорожного подвижного состава 5 и с приемопередающим устройством 9.
Система определения местоположения железнодорожного подвижного состава работает следующим образом.
Перед началом работы системы для установленных на каждой шпале 2 железнодорожного пути 3 электронных радиочастотных меток 1 (RFID метки) определяются их абсолютные координаты путем геодезических изысканий, в том числе используя имеющиеся пункты опорной геодезической сети. Путем анализа данных о состоянии пути 3, полученных после проездов вагонов-путеизмерителей, оснащенных средствами для считывания электронных радиочастотных меток, с помощью математического моделирования определяются абсолютные координаты оси пути, местоположение объектов инфраструктуры, формируется цифровая модель железнодорожного пути. Сформированная таким образом модель пути позволяет определить местоположение железнодорожных транспортных средств как непосредственно на самом транспорте (подвижном составе 5), так и в диспетчерских пунктах 11 (или центрах управления движения) путем считывания уникального идентификатора электронной радиочастотной метки (RFID метки) и сопоставления данного идентификатора с имеющейся информацией в базе данных цифровой модели пути 3, которая перед началом работы системы записывается в блок 8 памяти подвижного состава 5 и в память вычислительного устройства 12 (в блоке 14 памяти) диспетчерского пункта 11 или центра управления движением.
При движении железнодорожного транспортного средства (подвижного состава 5), радиочастотный считыватель 4 осуществляет считывание информации с радиочастотных меток 1, которыми снабжены все шпалы 2 железнодорожного пути 3. Сигнал с радиочастотного считывателя 4 поступает в дешифратор 6, где происходит ее декодирование и выделение необходимой информации для ее последующей обработки в микропроцессоре 7 и передачи обработанной информации в блок 13 управления железнодорожного подвижного состава 5, а также в диспетчерские пункты 11 (или центры управления движения) по каналу связи, реализованному посредством приемопередающего устройства 9 в подвижном составе 5 и приемопередающего устройства 10 в диспетчерском пункте 11. Радиочастотная метка 1 содержит уникальный идентификатор, который после дешифровки позволяет сопоставить информацию со считанной метки с имеющейся информацией в базе данных цифровой модели пути 3, записанной в блоках 8 и 14 памяти, и соответственно определить координаты местоположения. Следовательно, имея соответствующим образом сформированный маршрут и расписание движения, блок 13 управления железнодорожного подвижного состава может осуществлять необходимые скоростные режимы движения, безопасного торможения и остановки железнодорожного подвижного состава 5.
Полученная диспетчерским пунктом по каналу связи информация о точном местоположении соответствующего железнодорожного транспортного средства может быть передана в центры организации и управления движением для осуществления контроля соблюдения параметров движения составов, а также для организации оптимальных интервалов движения. Центры управления движением, диспетчерские пункты путем обратной связи могут осуществлять адресное регулирование интервалов и режимов движения железнодорожного транспорта.
При установке на железнодорожном подвижном составе двух радиочастотных считывателей, один из которых размещен на хвостовом вагоне, можно с высокой точностью определить целостность состава поезда, поскольку при известности длины состава в данном случае будут известны и точные абсолютные координаты первого и хвостового вагонов.
Средства определения местоположения железнодорожного подвижного состава могут быть установлены на вагоны-путеизмерители, путеизмерительные и диагностические комплексы, которые осуществляют регулярный мониторинг состояния железнодорожного пути, используя штатные путеизмерительные и дефектоскопные комплексы. В данном случае при расшифровке полученных данных о состоянии пути, дефектах и отступлениях будет одновременно получена информация от радиочастотного считывателя 4 об их точном местонахождении, что позволяет адресно точно осуществить ремонтные и регламентные мероприятия. В свою очередь центр управления определяет соответственно координаты местоположения, сопоставляет считанную информацию о состоянии пути с его точным местоположением в координатном пространстве. При этом информация о критичных дефектах железнодорожного пути по имеющимся каналам связи может быть передана в диспетчерские пункты, соответствующие диагностические центры с целью принятия управленческих решений об организации движения, ограничениях в режимах движения и пропускной способности, обеспечить оперативный ремонт.
Таким образом, предлагаемая система определения местоположения железнодорожного подвижного состава по сравнению с известными из уровня техники техническими решениями аналогичного назначения может быть использована не только для прицельной остановки железнодорожных транспортных средств, определения направления движения, скорости, пройденного пути, но и для определения в абсолютных координатах местоположения с высокой, субдециметровой точностью (±300 мм,  от расстояния между шпал) как элемента строения железнодорожного пути, так и местоположение железнодорожного транспорта в каждый момент времени на любой скорости путем считывания электронной разметки пути, реализованной за счет использования стандартных радиочастотных меток.
от расстояния между шпал) как элемента строения железнодорожного пути, так и местоположение железнодорожного транспорта в каждый момент времени на любой скорости путем считывания электронной разметки пути, реализованной за счет использования стандартных радиочастотных меток.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПОДВИЖНОГО РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА НА ЖЕЛЕЗНОДОРОЖНОМ ПУТИ | 2015 |
|
RU2579606C1 |
| КОМПЬЮТЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ ПОРТОВЫМ КОНТЕЙНЕРНЫМ ТЕРМИНАЛОМ | 2010 |
|
RU2435228C1 |
| СПОСОБ И СИСТЕМА ПРИЦЕЛЬНОЙ ОСТАНОВКИ ЖЕЛЕЗНОДОРОЖНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2009 |
|
RU2397094C1 |
| Компьютерная система дистанционного контроля и управления объектами жизнеобеспечения городской инфраструктуры | 2019 |
|
RU2733054C1 |
| КОМПЬЮТЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ ПОРТОВЫМ КОНТЕЙНЕРНЫМ ТЕРМИНАЛОМ | 2017 |
|
RU2656972C1 |
| КОМПЬЮТЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ СТРОИТЕЛЬНЫМ КОМПЛЕКСОМ | 2016 |
|
RU2615025C1 |
| СПОСОБ И СИСТЕМА РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ И ПОЗИЦИОНИРОВАНИЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2012 |
|
RU2499714C2 |
| СПОСОБ И СИСТЕМА РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ И ПОЗИЦИОНИРОВАНИЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2014 |
|
RU2559869C1 |
| Система распределенного контроля железнодорожного пути для высокоскоростного движения | 2017 |
|
RU2671796C1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО КОНТРОЛЯ И УПРАВЛЕНИЯ ИНКАССАТОРСКИМИ МАШИНАМИ | 2011 |
|
RU2463665C1 |
Изобретение относится к железнодорожной автоматике для определения местоположения подвижного состава. Система содержит радиочастотные метки на каждой шпале железнодорожного пути, и на объектах инфраструктуры, радиочастотный считыватель, установленный на железнодорожном подвижном составе, на котором установлены дешифратор, микропроцессор с подключенными к нему блоком памяти, в котором записана цифровая модель пути с прилегающей инфраструктурой и информацией о размещенных на пути шпалах с их абсолютными координатами, и приемопередающим устройством, соединенным по каналу связи с приемопередающим устройством диспетчерского пункта или центра управления движением, у которых в памяти вычислительного устройства записана цифровая модель пути с прилегающей инфраструктурой и информацией о размещенных на пути шпалах с их абсолютными координатами, при этом выход радиочастотного считывателя через дешифратор подключен к входу микропроцессора, соединенного с блоком управления железнодорожного подвижного состава и с приемопередающим устройством. Достигается повышение точности определения местоположения железнодорожного транспортного средства. 1 з.п. ф-лы, 1 ил.
1. Система определения местоположения железнодорожного подвижного состава, содержащая радиочастотные метки, размещенные на железнодорожном пути и объектах инфраструктуры, и радиочастотный считыватель, установленный на железнодорожном подвижном составе, отличающаяся тем, что каждая шпала железнодорожного пути снабжена радиочастотной меткой, а на железнодорожном подвижном составе установлены дешифратор, микропроцессор с подключенными к нему блоком памяти, в котором записана цифровая модель пути с прилегающей инфраструктурой и информацией о размещенных на пути шпалах с их абсолютными координатами, и приемопередающим устройством, соединенным по каналу связи с приемопередающим устройством диспетчерского пункта или центра управления движением, у которых в памяти вычислительного устройства записана цифровая модель пути с прилегающей инфраструктурой и информацией о размещенных на пути шпалах с их абсолютными координатами, при этом выход радиочастотного считывателя через дешифратор подключен к входу микропроцессора, соединенного с блоком управления железнодорожного подвижного состава и с приемопередающим устройством.
2. Система определения местоположения железнодорожного подвижного состава по п. 1, отличающаяся тем, что на железнодорожном подвижном составе установлено не менее двух радиочастотных считывателей.
| CN 107139973 A, 08.09.2017 | |||
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| Токарный резец | 1924 |
|
SU2016A1 |
| CN 107284475 A, 24.10.2017 | |||
| US 2017043797 A1, 16.02.2017 | |||
| CN 102139704 A, 03.08.2011 | |||
| CN 103818407 A, 28.05.2014 | |||
| Сушильная камера, например для шлихтовальной машины | 1959 |
|
SU125535A1 |

