Область техники, к которой относится изобретение
[1] Настоящая технология относится к способам и электронным устройствам для управления транспортным средством, а более конкретно, к способам и электронным устройствам для калибровки лидарной системы.
Уровень техники
[2] В предшествующем уровне техники предложены и реализованы несколько компьютерных навигационных систем, которые выполнены с возможностью помощи при навигации и/или управлении транспортным средством. Эти системы варьируются от более базовых решений на основе картографической локализации (т.е. от использования компьютерной системы для того, чтобы помогать водителю в осуществлении навигации по маршруту из начального пункта в пункт назначения) до более сложных решений (компьютеризированных и/или автономных от водителя систем вождения).
[3] Некоторые из этих систем реализуются как то, что общеизвестно в качестве системы "оптимального регулирования скорости" или системы “круиз-контроля”. В этих системах компьютерная система на борту транспортных средств поддерживает заданную пользователем скорость транспортного средства. Часть системы оптимального регулирования скорости реализует систему "интеллектуального управления дистанцией", за счет которой пользователь может устанавливать дистанцию до потенциального автомобиля впереди (к примеру, выбирать значение, выражаемое в числе транспортных средств), и компьютерная система регулирует скорость транспортного средства по меньшей мере частично на основе транспортного средства, приближающегося к впереди идущему потенциальному транспортному средству в пределах предварительно заданной дистанции. Некоторые системы оптимального регулирования скорости дополнительно оснащаются системами управления столкновениями, причем эти системы, при обнаружении транспортного средства (или другого препятствия) перед движущимся транспортным средством, замедляют или останавливают транспортное средство.
[4] Некоторые усовершенствованные системы обеспечивают полностью автономное вождение транспортного средства без прямого управления оператора (т.е. водителя). Эти транспортные средства с поддержкой автономного вождения включают в себя компьютерные системы, которые могут побуждать транспортное средство ускоряться, тормозить, останавливаться, сменять полосу движения и автоматически парковаться.
[5] Одна из основных технических проблем в реализации вышеуказанных компьютерных систем заключается в способности компьютерной системы обнаруживать объект, расположенный поблизости от транспортного средства. В одном примере компьютерным системам может требоваться способность обнаруживать транспортное средство впереди рассматриваемого транспортного средства (причем рассматриваемое транспортное средство имеет компьютерную систему на борту), причем это впереди идущее транспортное средство может представлять риск/опасность для рассматриваемого транспортного средства и может требовать от компьютерной системы принятия корректирующей меры, будь то торможение либо в иных случаях изменение скорости, остановка или смена полосы движения.
[6] Другие технические проблемы с реализацией вышеуказанных компьютерных систем заключаются в декалибровке датчиков и других систем, которые собирают данные относительно окрестностей транспортного средства. Множество факторов, включающих в себя погоду, дорожные условия, привычки при вождении, например, оказывают влияние на датчики и другие системы с течением времени, которые требуют калибровки, чтобы обеспечивать то, что данные точно собираются и корректно используются посредством других систем для управления транспортными средствами.
Сущность изобретения
[7] Разработчики настоящей технологии выяснили, что решение предшествующего уровня техники имеет недостатки.
[8] В первом широком аспекте настоящей технологии обеспечен способ калибровки лидарной (LIDAR) системы оптического обнаружения и дальнометрии. Лидарная система имеет систему координат. Система координат имеет оси. Одна из осей проходит вдоль направления нормали к поверхности земли. Лидарная система может устанавливаться на беспилотном транспортном средстве (SDV). SDV расположено на поверхности земли. Способ осуществляется посредством электронного устройства, связанного с SDV. Способ содержит получение, посредством электронного устройства, от лидарной системы поднабора обнаруженных точек данных в системе координат лидарной системы и изображение внешней поверхности SDV. Поднабор обнаруженных точек данных представляет собой поднабор множества обнаруженных точек данных лидарной системы. Способ содержит формирование, посредством электронного устройства, поднабора точек данных зеркального изображения на основе поднабора обнаруженных точек данных. Поднабор точек данных зеркального изображения представляет зеркальное изображение внешней поверхности SDV. Способ содержит проецирование, посредством электронного устройства, поднабора точек данных зеркального изображения на поднабор обнаруженных точек данных таким образом, чтобы задавать пары перекрывающихся точек данных. Каждая данная пара перекрывающихся точек данных включает в себя: (i) первую точку данных из поднабора обнаруженных точек данных и (ii) вторую точку данных из поднабора точек данных зеркального изображения таким образом, что вторая точка данных представляет собой зеркальное изображение третьей точки данных в поднаборе обнаруженных точек данных, которая располагается симметрично напротив первой точки данных. Способ содержит использование, посредством электронного устройства, (i) по меньшей мере двух первых точек данных и (ii) по меньшей мере двух соответствующих третьих точек данных, которые располагаются симметрично напротив по меньшей мере двух первых точек данных, для определения оси симметрии SDV в системе координат лидарной системы. Способ содержит калибровку, посредством электронного устройства, лидарной системы с использованием углового смещения между осью симметрии SDV и другой из осей системы координат лидарной системы.
[9] В некоторых вариантах осуществления способа способ дополнительно содержит, до получения поднабора обнаруженных точек данных, получение множества обнаруженных точек данных от лидарной системы.
[10] В некоторых вариантах осуществления способа способ дополнительно содержит фильтрацию, посредством электронного устройства, множества обнаруженных точек данных для определения поднабора обнаруженных точек данных.
[11] В некоторых вариантах осуществления способа фильтрация множества обнаруженных точек данных содержит применение, посредством электронного устройства, правила аппроксимации ко множеству обнаруженных точек данных, обнаруженных посредством лидарной системы.
[12] В некоторых вариантах осуществления способа правило аппроксимации содержит индикацию пороговой дистанции, которая, как считается, включает в себя обнаруженный поднабор точек данных.
[13] В некоторых вариантах осуществления способа до получения множества обнаруженных точек данных способ дополнительно содержит , обеспечение посредством электронного устройства индикации к увеличению внешней поверхности SDV.
[14] В некоторых вариантах осуществления способа обеспечение индикации к увеличению внешней поверхности содержит обеспечение посредством электронного устройства индикации к полному открытию расположенных напротив дверей SDV.
[15] В некоторых вариантах осуществления способа обеспечение индикации к увеличению внешней поверхности дополнительно содержит обеспечение посредством электронного устройства индикации к полному открытию багажника SDV.
[16] В некоторых вариантах осуществления способа проецирование посредством электронного устройства поднабора точек данных зеркального изображения на поднабор обнаруженных точек данных содержит итеративную минимизацию посредством электронного устройства дистанции между поднабором точек данных зеркального изображения и поднабором обнаруженных точек данных.
[17] В некоторых вариантах осуществления способа итеративная минимизация дистанции содержит определение правила преобразования между поднабором точек данных зеркального изображения и поднабором обнаруженных точек данных таким образом, чтобы перекрывать данную точку данных зеркального изображения с данной обнаруженной точкой данных. Данная точка данных зеркального изображения сформирована на основе данной другой обнаруженной точки, которая располагается симметрично напротив данной обнаруженной точки данных.
[18] В некоторых вариантах осуществления способа итеративная минимизация дистанции содержит применение посредством электронного устройства итеративного алгоритма ближайших точек (ICP).
[19] В некоторых вариантах осуществления способа (i) по меньшей мере две первые точки данных и (ii) по меньшей мере две соответствующие третьи точки данных содержат, соответственно, две первые точки данных и (ii) две соответствующие третьи точки данных.
[20] В некоторых вариантах осуществления способа (i) по меньшей мере две первые точки данных и (ii) по меньшей мере две соответствующие третьи точки данных содержат, соответственно, три первые точки данных и (ii) три соответствующие третьи точки данных.
[21] В некоторых вариантах осуществления способа использование (i) по меньшей мере двух первых точек данных и (ii) по меньшей мере двух соответствующих третьих точек данных, которые располагаются симметрично напротив по меньшей мере двух первых точек данных, для определения оси симметрии SDV, содержит:
- выбор посредством электронного устройства (i) по меньшей мере двух первых точек данных и (ii) по меньшей мере двух соответствующих третьих точек данных;
- определение посредством электронного устройства средней точки для каждой пары (i) из по меньшей мере двух первых точек данных и (ii) по меньшей мере двух соответствующих третьих точек данных; и
- определение посредством электронного устройства линии через соответствующие средние точки в качестве оси симметрии SDV.
[22] В некоторых вариантах осуществления способа система координат лидарной системы имеет три ортогональных оси.
[23] В некоторых вариантах осуществления способа множество обнаруженных точек данных собираются в системе сферических координат и преобразуются в систему координат лидарной системы, имеющей три ортогональных оси.
[24] В некоторых вариантах осуществления способа поднабор точек данных зеркального изображения формируется в системе координат лидарной системы.
[25] В некоторых вариантах осуществления способа поднабор точек данных зеркального изображения формируется в многомерном пространстве, идентичном многомерному пространству поднабора обнаруженных точек данных.
[26] В некоторых вариантах осуществления до калибровки способ дополнительно содержит: (i) определение посредством электронного устройства направления нормали к поверхности земли на основе множества обнаруженных точек данных лидарной системы и (ii) привязку посредством электронного устройства одной из осей системы координат на основе направления нормали к поверхности земли таким образом, что одна из осей проходит в направлении нормали.
[27] В некоторых вариантах осуществления способ дополнительно содержит определение посредством электронного устройства углового смещения между осью симметрии SDV и одной из осей системы координат лидарной системы.
[28] В некоторых вариантах осуществления способа использование углового смещения содержит: (i) определение посредством электронного устройства правила вращательного сдвига на основе углового смещения таким образом, что другая из осей системы координат лидарной системы совпадает с осью симметрии SDV, и (ii) использование посредством электронного устройства правила вращательного сдвига для вращения используемых обнаруженных точек данных лидарной системы, за счет этого определяя внешне калиброванные используемые обнаруженные точки данных.
[29] В некоторых вариантах осуществления способ дополнительно содержит итеративное повторение калибровки лидарной системы в ходе работы SDV.
[30] Во втором широком аспекте настоящей технологии обеспечен способ определения оси симметрии беспилотного транспортного средства (SDV). В SDV может устанавливаться лидарная (LIDAR) система оптического обнаружения и дальнометрии. Лидарная система имеет систему координат. Система координат имеет оси, способ осуществляется посредством электронного устройства, связанного с SDV. Способ содержит получение, посредством электронного устройства, от лидарной системы поднабора обнаруженных точек данных в системе координат лидарной системы и изображение внешней поверхности SDV. Поднабор обнаруженных точек данных представляет собой поднабор множества обнаруженных точек данных лидарной системы. Способ содержит формирование, посредством электронного устройства, поднабора точек данных зеркального изображения на основе поднабора обнаруженных точек данных. Поднабор точек данных зеркального изображения представляет зеркальное изображение внешней поверхности SDV. Способ содержит проецирование, посредством электронного устройства, поднабора точек данных зеркального изображения на поднабор обнаруженных точек данных таким образом, чтобы задавать пары перекрывающихся точек данных. Каждая данная пара перекрывающихся точек данных включает в себя: (i) первую точку данных из поднабора обнаруженных точек данных и (ii) вторую точку данных из поднабора точек данных зеркального изображения таким образом, что вторая точка данных представляет собой зеркальное изображение третьей точки данных в поднаборе обнаруженных точек данных, которая располагается симметрично напротив первой точки данных. Способ содержит использование, посредством электронного устройства, (i) по меньшей мере двух первых точек данных и (ii) по меньшей мере двух соответствующих третьих точек данных, которые располагаются симметрично напротив по меньшей мере двух первых точек данных, для определения оси симметрии SDV в системе координат лидарной системы.
[31] В третьем широком аспекте настоящей технологии обеспечено электронное устройство для калибровки (лидарной) системы оптического обнаружения и дальнометрии. Лидарная система имеет систему координат. Система координат имеет оси. Одна из осей проходит вдоль направления нормали к поверхности земли. Лидарная система может устанавливаться на беспилотном транспортном средстве (SDV). SDV расположено на поверхности земли. Электронное устройство выполнено с возможностью получать от лидарной системы поднабор обнаруженных точек данных в системе координат лидарной системы и представлять внешнюю поверхность SDV. Поднабор обнаруженных точек данных представляет собой поднабор множества обнаруженных точек данных лидарной системы. Электронное устройство выполнено с возможностью формировать поднабор точек данных зеркального изображения на основе поднабора обнаруженных точек данных. Поднабор точек данных зеркального изображения представляет зеркальное изображение внешней поверхности SDV. Электронное устройство выполнено с возможностью проецировать поднабор точек данных зеркального изображения на поднабор обнаруженных точек данных таким образом, чтобы задавать пары перекрывающихся точек данных. Каждая данная пара перекрывающихся точек данных включает в себя: (i) первую точку данных из поднабора обнаруженных точек данных и (ii) вторую точку данных из поднабора точек данных зеркального изображения таким образом, что вторая точка данных представляет собой зеркальное изображение третьей точки данных в поднаборе обнаруженных точек данных, которая располагается симметрично напротив первой точки данных. Электронное устройство выполнено с возможностью использовать (i) по меньшей мере две первые точки данных и (ii) по меньшей мере две соответствующие третьи точки данных, которые располагаются симметрично напротив по меньшей мере двух первых точек данных, для определения оси симметрии SDV в системе координат лидарной системы. Электронное устройство выполнено с возможностью калибровать лидарную систему с использованием углового смещения между осью симметрии SDV и другой из осей системы координат лидарной системы.
[32] В некоторых вариантах осуществления электронное устройство дополнительно выполнено с возможностью, до получения поднабора обнаруженных точек данных, получать множество обнаруженных точек данных от лидарной системы.
[33] В некоторых вариантах осуществления электронное устройство дополнительно выполнено с возможностью фильтровать множество обнаруженных точек данных для определения поднабора обнаруженных точек данных.
[34] В некоторых вариантах осуществления для возможности электронным устройством фильтровать множество обнаруженных точек данных электронное устройство выполнено с возможностью применять правило аппроксимации ко множеству обнаруженных точек данных, обнаруженных посредством лидарной системы.
[35] В некоторых вариантах осуществления электронного устройства правило аппроксимации содержит индикацию пороговой дистанции, которая, как считается, включает в себя обнаруженный поднабор точек данных.
[36] В некоторых вариантах осуществления электронное устройство дополнительно выполнено с возможностью до получения множества обнаруженных точек данных обеспечивать индикацию для того, чтобы увеличивать внешнюю поверхность SDV.
[37] В некоторых вариантах осуществления электронного устройства обеспечение индикации к увеличению внешней поверхности содержит выполнение электронного устройства с возможностью обеспечить индикации к полному открытию расположенных напротив дверей SDV.
[38] В некоторых вариантах осуществления электронного устройства обеспечение индикации к увеличению внешней поверхности содержит выполнение электронного устройства с возможностью обеспечивать индикацию к полному открытию багажника SDV.
[39] В некоторых вариантах осуществления для возможности проецирования электронным устройством поднабора точек данных зеркального изображения на поднабор обнаруженных точек данных электронное устройство выполнено с возможностью итеративно минимизировать дистанцию между поднабором точек данных зеркального изображения и поднабором обнаруженных точек данных.
[40] В некоторых вариантах осуществления электронного устройства итеративная минимизация дистанции содержит выполнение электронного устройства с возможностью определять правило преобразования между поднабором точек данных зеркального изображения и поднабором обнаруженных точек данных таким образом, чтобы перекрывать данную точку данных зеркального изображения с данной обнаруженной точкой данных. Данная точка данных зеркального изображения сформирована на основе данной другой обнаруженной точки, которая располагается симметрично напротив данной обнаруженной точки данных.
[41] В некоторых вариантах осуществления электронного устройства итеративная минимизация дистанции содержит выполнение электронного устройства с возможностью применять итеративный алгоритм ближайших точек (ICP).
[42] В некоторых вариантах осуществления электронного устройства (i) по меньшей мере две первые точки данных и (ii) по меньшей мере две соответствующие третьи точки данных содержат, соответственно, две первые точки данных и (ii) две соответствующие третьи точки данных.
[43] В некоторых вариантах осуществления электронного устройства (i) по меньшей мере две первые точки данных и (ii) по меньшей мере две соответствующие третьи точки данных содержат, соответственно, три первые точки данных и (ii) три соответствующие третьи точки данных.
[44] В некоторых вариантах осуществления электронного устройства использование (i) по меньшей мере двух первых точек данных и (ii) по меньшей мере двух соответствующих третьих точек данных, которые располагаются симметрично напротив по меньшей мере двух первых точек данных, для определения оси симметрии SDV, содержит выполнение электронного устройства с возможностью:
- выбирать (i) по меньшей мере две первые точки данных и (ii) по меньшей мере две соответствующие третьи точки данных;
- для каждой пары (i) из по меньшей мере двух первых точек данных и (ii) по меньшей мере двух соответствующих третьих точек данных, определять среднюю точку; и
- определять линию через соответствующие средние точки в качестве оси симметрии SDV.
[45] В некоторых вариантах осуществления электронного устройства система координат лидарной системы имеет три ортогональных оси.
[46] В некоторых вариантах осуществления электронного устройства множество обнаруженных точек данных собираются в системе сферических координат и преобразуются в систему координат лидарной системы, имеющей три ортогональных оси.
[47] В некоторых вариантах осуществления электронного устройства поднабор точек данных зеркального изображения формируется в системе координат лидарной системы.
[48] В некоторых вариантах осуществления электронного устройства поднабор точек данных зеркального изображения формируется в многомерном пространстве, идентичном многомерному пространству поднабора обнаруженных точек данных.
[49] В некоторых вариантах осуществления электронного устройства электронное устройство дополнительно выполнено с возможностью до калибровки: (i) определять направление нормали к поверхности земли на основе множества обнаруженных точек данных лидарной системы и (ii) привязывать одну из осей системы координат на основе направления нормали к поверхности земли таким образом, что одна из осей проходит в направлении нормали.
[50] В некоторых вариантах осуществления электронное устройство дополнительно выполнено с возможностью определять угловое смещение между осью симметрии SDV и одной из осей системы координат лидарной системы.
[51] В некоторых вариантах осуществления электронного устройства использование углового смещения содержит выполнение электронного устройства с возможностью (i) определять правило вращательного сдвига на основе углового смещения таким образом, что другая из осей системы координат лидарной системы совпадает с осью симметрии SDV, и (ii) использовать правило вращательного сдвига для вращения используемых обнаруженных точек данных лидарной системы, за счет этого определяя внешне калиброванные используемые обнаруженные точки данных.
[52] В некоторых вариантах осуществления электронное устройство дополнительно выполнено с возможностью итеративно калибровать лидарную систему в ходе работы SDV.
[53] В четвертом широком аспекте настоящей технологии обеспечено электронное устройство для определения оси симметрии беспилотного транспортного средства (SDV), при этом в SDV может устанавливаться (лидарная) система оптического обнаружения и дальнометрии. Лидарная система имеет систему координат. Система координат имеет оси. SDV расположено на поверхности земли. Электронное устройство выполнено с возможностью получать от лидарной системы поднабор обнаруженных точек данных в системе координат лидарной системы и представлять внешнюю поверхность SDV. Поднабор обнаруженных точек данных представляет собой поднабор множества обнаруженных точек данных лидарной системы. Электронное устройство выполнено с возможностью формировать поднабор точек данных зеркального изображения на основе поднабора обнаруженных точек данных. Поднабор точек данных зеркального изображения представляет зеркальное изображение внешней поверхности SDV. Электронное устройство выполнено с возможностью проецировать поднабор точек данных зеркального изображения на поднабор обнаруженных точек данных таким образом, чтобы задавать пары перекрывающихся точек данных. Каждая данная пара перекрывающихся точек данных включает в себя: (i) первую точку данных из поднабора обнаруженных точек данных и (ii) вторую точку данных из поднабора точек данных зеркального изображения таким образом, что вторая точка данных представляет собой зеркальное изображение третьей точки данных в поднаборе обнаруженных точек данных, которая располагается симметрично напротив первой точки данных. Электронное устройство выполнено с возможностью использовать (i) по меньшей мере две первые точки данных и (ii) по меньшей мере две соответствующие третьи точки данных, которые располагаются симметрично напротив по меньшей мере двух первых точек данных, для определения оси симметрии SDV в системе координат лидарной системы.
[54] В контексте настоящего описания изобретения "сервер" представляет собой компьютерную программу, которая выполняется на соответствующих аппаратных средствах и допускает прием запросов (например, из клиентских устройств) по сети и выполнение этих запросов либо побуждение выполнения этих запросов. Аппаратные средства могут реализовываться как один физический компьютер или одна физическая компьютерная система, но ни одно из означенного не должно обязательно иметь место относительно настоящей технологии. В настоящем контексте использование выражения "сервер" не означает, что каждая задача (например, принимаемые инструкции или запросы) или любая конкретная задача должна приниматься, выполняться или побуждаться к выполнению посредством идентичного сервера (т.е. идентичного программного обеспечения и/или аппаратных средств); оно означает, что любое число программных элементов или аппаратных устройств может быть обеспечено при приеме/отправке, выполнении или побуждении к выполнению любой задачи или запроса либо результатов любой задачи или запроса; и все это программное обеспечение и аппаратные средства могут представлять собой один сервер либо несколько серверов, причем все из означенного включается в выражение "по меньшей мере один сервер".
[55] В контексте настоящего описания изобретения "электронное устройство" представляет собой любые компьютерные аппаратные средства, которые допускают выполнение программного обеспечения, соответствующего рассматриваемой релевантной задаче. В контексте настоящего описания изобретения термин "электронное устройство" подразумевает, что устройство может функционировать в качестве сервера для других электронных устройств и клиентских устройств; тем не менее, это не должно обязательно иметь место относительно настоящей технологии. Таким образом, некоторые (неограничивающие) примеры электронных устройств включают в себя персональные компьютеры (настольные компьютеры, переносные компьютеры, нетбуки и т.д.), смартфоны и планшеты, а также сетевое оборудование, такое как маршрутизаторы, коммутаторы и шлюзы. Следует понимать, что в настоящем контексте тот факт, что устройство функционирует в качестве электронного устройства, не означает того, что оно не может функционировать в качестве сервера для других электронных устройств. Использование выражения "электронное устройство" не исключает использование нескольких клиентских устройств при приеме/отправке, выполнении или побуждении к выполнению любой задачи или запроса либо результатов любой задачи или запроса, или этапов любого способа, описанного в данном документе.
[56] В контексте настоящего описания изобретения "клиентское устройство" представляет собой любые компьютерные аппаратные средства, которые допускают выполнение программного обеспечения, соответствующего рассматриваемой релевантной задаче. В контексте настоящего описания изобретения термин "клиентское устройство" в общем связан с пользователем клиентского устройства. Таким образом, некоторые (неограничивающие) примеры клиентских устройств включают в себя персональные компьютеры (настольные компьютеры, переносные компьютеры, нетбуки и т.д.), смартфоны и планшеты, а также сетевое оборудование, такое как маршрутизаторы, коммутаторы и шлюзы. Следует отметить, что устройство, выступающее в качестве клиентского устройства в настоящем контексте, не исключается из выступания в качестве сервера для других клиентских устройств. Использование выражения "клиентское устройство" не исключает использование нескольких клиентских устройств при приеме/отправке, выполнении или побуждении к выполнению любой задачи или запроса либо результатов любой задачи или запроса, или этапов любого способа, описанного в данном документе.
[57] В контексте настоящего описания изобретения выражение "информация" включает в себя информацию вообще любого характера или вида, допускающую сохранение в базе данных. Таким образом, информация включает в себя, но не только, аудиовизуальные произведения (изображения, фильмы, звукозаписи, презентации и т.д.), данные (данные местоположения, числовые данные и т.д.), текст (мнения, комментарии, вопросы, сообщения и т.д.), документы, электронные таблицы и т.д.
[58] В контексте настоящего описания изобретения выражение "программный компонент" включает в себя программное обеспечение (соответствующее конкретному аппаратному контексту), которое является необходимым и достаточным для того, чтобы осуществлять конкретную упоминаемую функцию(и).
[59] В контексте настоящего описания изобретения выражение "компьютерные носители хранения информации" (также называемые "носителями хранения данных") включает в себя носители вообще любого характера и вида, в том числе, без ограничения, RAM, ROM, диски (CD-ROM, DVD, гибкие диски, накопители на жестких дисках и т.д.), флэш-накопители, полупроводниковые накопители, накопители на ленте и т.д. Множество компонентов могут комбинироваться для формирования компьютерных носителей хранения информации, включающих в себя два или более компонентов носителей идентичного типа и/или два или более компонентов носителей различных типов.
[60] В контексте настоящего описания изобретения "база данных" представляет собой любую структурированную совокупность данных, независимо от ее конкретной структуры, программного обеспечения управления базами данных или компьютерных аппаратных средств, на которых данные сохраняются, реализуются или становятся доступными иными способами для использования. База данных может постоянно размещаться в идентичных аппаратных средствах с процессом, который сохраняет или использует информацию, сохраненную в базе данных, либо она может постоянно размещаться в отдельных аппаратных средствах, таких как выделенный сервер или множество серверов.
[61] В контексте настоящего описания изобретения слова "первый", "второй", "третий" и т.д. использованы в качестве прилагательных только для целей обеспечения различения существительных, которые они модифицируют, друг от друга, а не для целей описания конкретных взаимосвязей между этими существительными. Таким образом, например, следует понимать, что использование терминов "первая база данных" и "третий сервер" не подразумевает конкретный порядок, тип, хронологию, иерархию или ранжирование (например) относительно сервера, и их использование не (непосредственно) подразумевает, что "второй сервер" должен обязательно существовать в любой данной ситуации. Дополнительно, как пояснено в данном документе в других контекстах, ссылка на "первый" элемент и "второй" элемент не исключает того, что два элемента представляют собой идентичный фактический элемент реального мира. Таким образом, например, в некоторых случаях, "первый" сервер и "второй" сервер могут представлять собой идентичные программные и/или аппаратные компоненты, в других случаях они могут представлять собой различные программные и/или аппаратные компоненты.
[62] Реализации настоящей технологии имеют по меньшей мере одну из вышеуказанных целей и/или аспектов, но не обязательно имеют все из них. Следует понимать, что некоторые аспекты настоящей технологии, которые получены в результате попытки достигнуть вышеуказанной цели, могут не удовлетворять этой цели и/или могут удовлетворять другим целям, не изложенным конкретно в данном документе.
[63] Дополнительные и/или альтернативные признаки, аспекты и преимущества реализаций настоящей технологии должны становиться очевидными из нижеприведенного описания, прилагаемых чертежей и прилагаемой формулы изобретения.
Краткое описание чертежей
[64] Эти и другие признаки, аспекты и преимущества настоящей технологии должны становиться более понятными при рассмотрении нижеприведенного описания, прилагаемой формулы изобретения и прилагаемых чертежей, на которых:
[65] Фиг. 1 иллюстрирует принципиальную схему примерной компьютерной системы для реализации конкретных вариантов осуществления систем и/или способов настоящей технологии.
[66] Фиг. 2 иллюстрирует сетевое вычислительное окружение, подходящее для использования с некоторыми вариантами осуществления настоящей технологии.
[67] Фиг. 3 иллюстрирует вид "с высоты птичьего полета" транспортного средства сетевого вычислительного окружения по фиг. 2 в неограничивающем варианте осуществления настоящей технологии.
[68] Фиг. 4 иллюстрирует изображение вида "с высоты птичьего полета" множества обнаруженных точек данных в многомерном пространстве, обеспечиваемых посредством лидарной системы сетевого вычислительного окружения по фиг. 2 в неограничивающем варианте осуществления настоящей технологии.
[69] Фиг. 5 иллюстрирует схематичную иллюстрацию множества компьютеризированных операций, которые электронное устройство сетевого вычислительного окружения по фиг. 2 выполнено с возможностью выполнять для определения оси симметрии транспортного средства сетевого вычислительного окружения по фиг. 2 по меньшей мере в некоторых вариантах осуществления настоящей технологии.
[70] Фиг. 6 иллюстрирует поднабор обнаруженных точек данных, обеспеченный посредством лидарной системы сетевого вычислительного окружения по фиг. 2, представляющий внешнюю поверхность транспортного средства сетевого вычислительного окружения по фиг. 2, и поднабор точек данных зеркального изображения, сформированный посредством электронного устройства сетевого вычислительного окружения по фиг. 2, представляющий зеркальное изображение внешней поверхности транспортного средства сетевого вычислительного окружения по фиг. 2 в неограничивающем варианте осуществления настоящей технологии.
[71] Фиг. 7 иллюстрирует множество перекрывающихся точек данных, заданных посредством электронного устройства сетевого вычислительного окружения по фиг. 2 в качестве результата операции проецирования по фиг. 5 в неограничивающем варианте осуществления настоящей технологии.
[72] Фиг. 8 иллюстрирует ось симметрии транспортного средства сетевого вычислительного окружения по фиг. 2, определенную посредством электронного устройства сетевого вычислительного окружения по фиг. 2 по меньшей мере в некоторых вариантах осуществления настоящей технологии.
[73] Фиг. 9 иллюстрирует блок-схему последовательности операций способа в системе сетевого вычислительного окружения по фиг. 2, в соответствии с неограничивающими вариантами осуществления настоящей технологии.
[74] Фиг. 10 иллюстрирует схематичную иллюстрацию того, как угловые смещения и правила вращательного сдвига определяются посредством электронного устройства по фиг. 2, в соответствии с неограничивающими вариантами осуществления настоящей технологии.
Подробное описание изобретения
[75] Примеры и условный язык, изложенный в данном документе, преимущественно помогают читателю в понимании принципов настоящей технологии, а не ограничивают ее объем такими конкретно изложенными примерами и условиями. Следует принимать во внимание, что специалисты в данной области техники могут разрабатывать различные компоновки, которые, хотя и не описаны или показаны явно в данном документе, тем не менее осуществляют принципы настоящей технологии и включаются в пределы ее сущности и объема.
[76] Кроме того, в качестве помощи в понимании, нижеприведенное описание может описывать относительно упрощенные реализации настоящей технологии. Специалисты в данной области техники должны понимать, что различные реализации настоящей технологии могут иметь большую сложность.
[77] В некоторых случаях также может быть изложено то, что считается полезными примерами модификаций настоящей технологии. Это осуществляется просто в качестве помощи в понимании и, кроме того, не должно задавать объем или устанавливать ограничения настоящей технологии. Эти модификации не представляют собой исчерпывающий список, и специалисты в данной области техники могут вносить другие модификации при одновременном пребывании в пределах объема настоящей технологии. Дополнительно, если примеры модификаций не изложены, не следует интерпретировать это таким образом, что модификации невозможны, и/или таким образом, что то, что описывается, представляет собой единственный способ реализации этого элемента настоящей технологии.
[78] Кроме того, все утверждения в данном документе, излагающие принципы, аспекты и реализации технологии, а также их конкретные примеры охватывают их конструктивные и функциональные эквиваленты независимо от того, являются они известными в настоящее время или разрабатываются в будущем. Таким образом, например, специалисты в данной области техники должны признавать, что блок-схемы в данном документе представляют концептуальные виды иллюстративной схемы, осуществляющей принципы настоящей технологии. Аналогично, следует принимать во внимание, что все блок-схемы последовательности операций, блок-схемы, схемы переходов состояния, псевдокод и т.п. представляют различные процессы, которые могут представляться большей частью на машиночитаемых носителях, и в силу этого выполняются посредством компьютера или процессора, независимо от того, показан или нет в явной форме такой компьютер или процессор.
[79] Функции различных элементов, показанных на чертежах, включающих в себя все функциональные блоки, помеченные как "процессор", могут обеспечиваться с помощью специализированных аппаратных средств, а также аппаратных средств, допускающих выполнение программного обеспечения, в ассоциации с надлежащим программным обеспечением. При обеспечении посредством процессора, функции могут обеспечиваться посредством одного специализированного процессора, посредством одного совместно используемого процессора или посредством множества отдельных процессоров, некоторые из которых могут совместно использоваться. Кроме того, явное использование термина "процессор" или "контроллер" не должно истолковываться как означающее исключительно аппаратные средства, допускающие выполнение программного обеспечения, и может неявно включать в себя, без ограничений, аппаратные средства процессора цифровых сигналов (DSP), сетевой процессор, специализированную интегральную схему (ASIC), программируемую пользователем вентильную матрицу (FPGA), постоянное запоминающее устройство (ROM) для сохранения программного обеспечения, оперативное запоминающее устройство (RAM) и энергонезависимое устройство хранения. Также могут быть включены другие аппаратные средства, традиционные и/или специализированные.
[80] Программные модули или просто модули, которые подразумеваются как программные, могут представляться в данном документе в качестве любой комбинации элементов блок-схемы последовательности операций способа или других элементов, указывающих выполнение этапов процесса, и/или текстового описания. Такие модули могут выполняться посредством аппаратных средств, которые показаны явно или неявно.
[81] С учетом этих основных принципов, далее рассматриваются некоторые неограничивающие примеры, чтобы иллюстрировать различные реализации аспектов настоящей технологии.
Компьютерная система
[82] При обращении первоначально к фиг. 1, показана компьютерная система 100, подходящая для использования с некоторыми реализациями настоящей технологии, причем компьютерная система 100 содержит различные аппаратные компоненты, включающие в себя один или более одно- или многоядерных процессоров, совместно представленных посредством процессора 110, полупроводниковый накопитель 120, запоминающее устройство 130, которое может представлять собой оперативное запоминающее устройство или любой другой тип запоминающего устройства.
[83] Связь между различными компонентами компьютерной системы 100 может осуществляться посредством одной или более внутренних и/или внешних шин (не показаны) (например, посредством PCI-шины, универсальной последовательной шины, шины по стандарту IEEE1394 Firewire, шины SCSI, шины Serial ATA и т.д.), с которыми электронно соединяются различные аппаратные компоненты. Согласно вариантам осуществления настоящей технологии полупроводниковый накопитель 120 сохраняет программные инструкции, подходящие для загрузки в запоминающее устройство 130 и выполняемые посредством процессора 110 для определения присутствия объекта. Например, программные инструкции могут представлять собой часть управляющего приложения транспортного средства, выполняемого посредством процессора 110. Следует отметить, что компьютерная система 100 может иметь дополнительные и/или необязательные компоненты (не проиллюстрированы), такие как модули сетевой связи, модули локализации и т.п.
Сетевое компьютерное окружение
[84] Фиг. 2 иллюстрирует сетевое компьютерное окружение 200, подходящее для использования с некоторыми вариантами осуществления систем и/или способов настоящей технологии. Сетевое компьютерное окружение 200 содержит электронное устройство 210, связанное с транспортным средством 220 и/или связанное с пользователем (не проиллюстрирован), который может управлять транспортным средством 220, сервер 235, поддерживающий связь с электронным устройством 210 через сеть 245 связи (например, через Интернет и т.п., как подробнее описывается ниже в данном документе).
[85] Необязательно, сетевое компьютерное окружение 200 также может включать в себя GPS-спутник (не проиллюстрирован), передающий и/или принимающий GPS-сигнал в/из электронного устройства 210. Следует понимать, что настоящая технология не ограничена GPS и может использовать технологию позиционирования, отличную от GPS. Следует отметить, что GPS-спутник может вообще опускаться.
[86] Транспортное средство 220, с которым связано электронное устройство 210, может содержать любое туристическое или перевозное транспортное средство, такое как личный или коммерческий автомобиль, грузовик, мотоцикл и т.п. Хотя транспортное средство 220 проиллюстрировано как наземное транспортное средство, это может не иметь место в каждом варианте осуществления настоящей технологии. Например, транспортное средство 220 может представлять собой водное судно, такое как лодка, или воздушное судно, такое как беспилотный летательный аппарат.
[87] Транспортное средство 220 может представлять собой управляемое пользователем или безоператорное транспортное средство. По меньшей мере в некоторых вариантах осуществления настоящей технологии предполагается, что транспортное средство 220 может реализовываться как беспилотное транспортное средство (SDV). Следует отметить, что конкретные параметры транспортного средства 220 не являются ограничивающими, причем эти конкретные параметры включают в себя: производителя транспортных средств, модель транспортного средства, год изготовления транспортного средства, вес транспортного средства, габариты транспортного средства, распределение веса транспортного средства, площадь поверхности транспортного средства, высоту транспортного средства, тип приводной передачи (например, 2x или 4x), тип шин, тормозную систему, топливную систему, пробег, идентификационный номер транспортного средства и рабочий объем двигателя.
[88] Следует отметить, что транспортное средство 220 может управляться на поверхности 280 земли (см. фиг. 2). Например, транспортное средство 220 может быть расположено на поверхности 280 земли, имеющей направление 285 нормали, как проиллюстрировано, и может двигаться по ней в ходе работы.
[89] Реализация электронного устройства 210 не ограничена конкретным образом, но в качестве примера, электронное устройство 210 может реализовываться как блок управления двигателем транспортного средства, CPU транспортного средства, навигационное устройство транспортного средства (например, TomTom™, Garmin™), планшетный компьютер, персональный компьютер, встроенный в транспортное средство 220, и т.п. Таким образом, следует отметить, что электронное устройство 210 может или не может быть постоянно связано с транспортным средством 220. Дополнительно или альтернативно электронное устройство 210 может реализовываться в устройстве беспроводной связи, таком как мобильный телефон (например, смартфон или радиотелефон). В конкретных вариантах осуществления электронное устройство 210 имеет дисплей 270.
[90] Электронное устройство 210 может содержать часть или все компоненты компьютерной системы 100, проиллюстрированной на фиг. 1. В конкретных вариантах осуществления электронное устройство 210 представляет собой бортовое компьютерное устройство и содержит процессор 110, полупроводниковый накопитель 120 и запоминающее устройство 130. Другими словами, электронное устройство 210 содержит аппаратные средства и/или программное обеспечение, и/или микропрограммное обеспечение либо комбинацию вышеозначенного для обработки данных, как подробнее описано ниже.
Лидарная система
[91] В соответствии с неограничивающими вариантами осуществления настоящей технологии электронное устройство 210 дополнительно содержит или имеет доступ к (лидарной) системе 230 оптического обнаружения и дальнометрии, которая, вообще говоря, выполнена с возможностью захватывать данные по меньшей мере относительно участка окружающей области 250 транспортного средства 220.
[92] Со ссылкой на фиг. 3, проиллюстрирован вид 300 "с высоты птичьего полета" транспортного средства 220 в окружающей области 250. В этой неограничивающей реализации, лидарная система 230 устанавливается на транспортном средстве 220 на крыше, и транспортное средство 220 расположено на поверхности 280 земли.
[93] Тем не менее, предполагается, что лидарная система 230 может устанавливаться (или модернизироваться) на транспортном средстве 220 во множестве местоположений и/или во множестве конфигураций. Например, лидарная система 230 может монтироваться в салоне, в верхнем участке ветрового стекла транспортного средства 220, но другие местоположения находятся в пределах объема настоящего раскрытия сущности, в том числе заднее окно, боковые окна, передний капот, крыша, решетка радиатора, передний бампер или бок транспортного средства 220. В других неограничивающих вариантах осуществления настоящей технологии лидарная система 230 может устанавливаться даже в выделенном корпусе (не проиллюстрирован), установленном поверх транспортного средства 220.
[94] Независимо от конкретного местоположения, в котором лидарная система 230 устанавливается на транспортном средстве 220, как упомянуто выше, лидарная система 230 выполнена с возможностью захватывать данные относительно окрестностей 250 транспортного средства 220. Ниже описывается то, как лидарная система 230 выполнена с возможностью захватывать данные относительно окрестностей 250 транспортного средства 220.
[95] Вообще говоря, лидарная система 230 включает в себя в числе прочего (i) компонент испускания излучения и (ii) компонент обнаружения излучения. Компонент испускания излучения лидарной системы 230, такой как одно или более лазерных устройств (например), испускает излучение к окрестностям лидарной системы 230 (например, к окружающей области 250 транспортного средства 220). Испускаемое излучение затем рассеивается (и/или, например, отражается) во множестве направлений при контакте с объектом в окрестностях лидарной системы 230.
[96] По меньшей мере часть этого рассеянного (и/или отраженного) излучения рассеивается (и/или отражается) в направлении компонента обнаружения излучения лидарной системы 230, которая захватывает это рассеянное излучение. После того как рассеянное излучение захватывается, лидарная система 230 определяет "время пролета" излучения, т.е. разность между (i) моментом времени, когда излучение испускается, и (ii) моментом времени, когда рассеянное излучение захватывается. С использованием этого времени пролета и скорости света, лидарная система 230 имеет возможность определять позицию объекта, который рассеивает (и/или отражает) испускаемое излучение относительно лидарной системы 230.
[97] Лидарная система 230 выражает такую определенную позицию объекта в качестве обнаруженной точки данных в многомерном пространстве (например, в трехмерном пространстве). В связи с этим, вследствие повторного испускания излучения и захвата рассеянного излучения, лидарная система 230 может быть выполнена с возможностью определять большое число обнаруженных точек данных, которые вместе формируют многомерную карту (например, трехмерную карту) объектов, которые находятся около лидарной системы 230.
[98] Чтобы лучше иллюстрировать это, далее следует обратиться к фиг. 4, иллюстрирующей представление 400 в форме вида "с высоты птичьего полета" множества обнаруженных точек 420 данных в многомерном пространстве. Это многомерное пространство может представляться в системе 1000 координат лидарной системы 230.
[99] Как можно видеть на фиг. 4, лидарная система 230 может быть выполнена с возможностью формировать множество обнаруженных точек 420 данных, которые вместе формируют многомерную карту объектов около лидарной системы 230, т.е., как проиллюстрировано, множество обнаруженных точек 420 данных вместе формируют многомерную карту (i) внешней поверхности транспортного средства 220 и (ii) поверхности 280 земли.
[100] Тем не менее, следует отметить, что если другие объекты находятся в окрестностях лидарной системы 230 (в дополнение к транспортному средству 220), то множество обнаруженных точек 420 данных должны формировать многомерную карту (i) внешней поверхности транспортного средства 220, (iii) поверхности 280 земли и (iii) других объектов, без отступления от объема настоящей технологии.
[101] Со ссылкой на фиг. 10 ниже описывается система 1000 координат лидарной системы 230. Вообще говоря, лидарная система 230 может использовать систему 1000 координат для определения местоположения различных обнаруженных точек данных в многомерном пространстве, упомянутом выше. Например, система 1000 координат лидарной системы 230 может содержать три ортогональных оси, а именно, оси X, Y и Z. В связи с этим, система 1000 координат лидарной системы 230 может обеспечивать возможность лидарной системе 230 преобразовывать множество обнаруженных точек 420 данных в трехмерном пространстве, имеющем первую размерность по оси X, вторую размерность по оси Y и третью размерность по оси Z.
[102] Тем не менее, предполагается, что в ходе обнаружения (например, когда лидарная система 230 формирует множество обнаруженных точек 420 данных), лидарная система 230 может определять местоположение множества обнаруженных точек 420 данных в системе сферических координат, и после этого множество обнаруженных точек 420 данных могут преобразовываться посредством лидарной системы 230 в систему 1000 координат, имеющую три ортогональных оси, как описано выше.
[103] Возвращаясь к описанию по фиг. 2, лидарная система 230 функционально соединяется с процессором 110 электронного устройства 210 для передачи данных по меньшей мере относительно участка окрестностей лидарной системы 230 (например, включающего в себя множество обнаруженных точек 420 данных) в процессор 110 для их обработки. Хотя это подробнее описывается ниже, данные, передаваемые посредством лидарной системы 230 в процессор 110, могут использоваться посредством электронного устройства 210 для управления/маневрирования транспортным средством 220.
[104] Следует отметить, что множество дополнительных датчиков и систем могут реализовываться в комбинации с лидарной системой 230 на транспортном средстве 220 в некоторых вариантах осуществления настоящей технологии. Например, датчики с камерой могут устанавливаться на транспортном средстве 220 и функционально соединяться с процессором 110. В другом примере, радарные системы могут устанавливаться на транспортном средстве 220 и функционально соединяться с процессором 110. В связи с этим, транспортное средство 220 проиллюстрировано на фиг. 2 для простоты как имеющее только лидарную систему 230; тем не менее, в других вариантах осуществления транспортное средство 220 может реализовываться с дополнительными датчиками и системами в лидарной системе 230, без отступления от объема настоящей технологии.
[105] Лидарная система 230 является калибруемой.
[106] В первом случае, лидарная система 230 может подвергаться "внутренней калибровке". Вообще говоря, внутренняя калибровка означает технологии, которые могут использоваться для того, чтобы обеспечивать надлежащее функционирование лидарной системы 230 и точный захват и формирование лидарной системой 230 данных. Другими словами, "внутренняя калибровка" может выполняться для обеспечения того, что данные, захваченные или сформированные посредством лидарной системы 230, не смещаются непосредственно вследствие неправильного функционирования или анормального функционирования лидарной системы 230.
[107] В одном примере лидарная система 230 может неправильно функционировать или анормально функционировать, если она ошибочно определяет время пролета излучения, что приводит к ошибочной позиции объекта, который рассеивает излучение, и в силу этого, приводит к ошибочно обнаруженной точке данных. Внутренняя калибровка типично выполняется первоначально в ходе изготовления лидарной системы 230. Внутренняя калибровка лидарной системы 230 также может потенциально выполняться в ходе модернизации транспортного средства 220 лидарной системой 230.
[108] Во втором случае лидарная система 230 также может подвергаться "внешней калибровке". Вообще говоря, внешняя калибровка означает технологии, которые могут использоваться для обеспечения того, что данные, обеспеченные посредством лидарной системы 230 (например, обнаруженные точки данных, формирующие многомерную карту окрестностей лидарной системы 230), надлежащим образом используются посредством других систем. Это означает то, что даже если лидарная система 230 функционирует надлежащим образом (например, лидарная система 230 подвергнута успешной внутренней калибровке), данные, обеспеченные посредством лидарной системы 230, могут (хотя и без собственного смещения) использоваться посредством других систем со смещением вследствие множества факторов.
[109] Следовательно, внешняя калибровка используется не для того, чтобы компенсировать неправильное функционирование или анормальное функционирование лидарной системы 230 по сути, а для того, чтобы компенсировать по меньшей мере часть множества факторов, вследствие которых данные, обеспеченные посредством лидарной системы 230, могут использоваться посредством других систем со смещением.
[110] Как должно становиться очевидным из нижеприведенного описания, разработчики настоящей технологии создают способы и устройства для выполнения внешней калибровки лидарной системы 230. Ниже в данном документе подробнее описывается, какие факторы могут компенсироваться через способы и устройства, созданные посредством разработчиков настоящей технологии, и как они могут обеспечивать возможность выполнения внешней калибровки лидарной системы 230.
Сеть связи
[111] В некоторых вариантах осуществления настоящей технологии сеть 245 связи представляет собой Интернет. В альтернативных неограничивающих вариантах осуществления сеть связи может реализовываться как любая подходящая локальная вычислительная сеть (LAN), глобальная вычислительная сеть (WAN), частная сеть связи и т.п. Следует четко понимать, что реализации для сети связи предназначаются только для целей иллюстрации. То, как реализуется линия связи (без отдельной ссылки с номером) между электронным устройством 210 и сетью 245 связи, должно зависеть, в числе прочего, от того, как реализуется электронное устройство 210. Просто в качестве примера, а не в качестве ограничения, в тех вариантах осуществления настоящей технологии, в которых электронное устройство 210 реализуется как устройство беспроводной связи, такое как смартфон или навигационное устройство, линия связи может реализовываться как линия беспроводной связи. Примеры линий беспроводной связи включают в себя, но не только, сети связи 3G, линию сети связи 4G и т.п. Сеть 245 связи также может использовать беспроводное соединение с сервером 235.
Сервер
[112] В некоторых вариантах осуществления настоящей технологии сервер 235 реализуется как компьютер-сервер и может содержать часть или все компоненты компьютерной системы 100 по фиг. 1. В одном неограничивающем примере сервер 235 реализуется как сервер Dell™ PowerEdge™ под управлением операционной системы Windows Server™ Microsoft™, но также может реализовываться в любых других подходящих аппаратных средствах, программном обеспечении и/или микропрограммном обеспечении либо в комбинации вышеозначенного. В проиллюстрированных неограничивающих вариантах осуществления настоящей технологии сервер представляет собой один сервер. В альтернативных неограничивающих вариантах осуществления настоящей технологии (не показаны) функциональность сервера 235 может распределяться и может реализовываться через несколько серверов.
[113] В некоторых неограничивающих вариантах осуществления настоящей технологии процессор 110 электронного устройства 210 может поддерживать связь с сервером 235, чтобы принимать одно или более обновлений. Обновления могут представлять собой, но не только, обновления программного обеспечения, обновления карт, обновления маршрутов, обновления прогноза погоды и т.п. В некоторых вариантах осуществления настоящей технологии процессор 110 также может быть выполнен с возможностью передавать на сервер 235 определенные рабочие данные, такие как проезжаемые маршруты, данные трафика, данные рабочих характеристик и т.п. Некоторые или все данные, передаваемые между транспортным средством 220 и сервером 235, могут шифроваться и/или анонимизироваться.
Внешняя калибровка лидарной системы
[114] Как упомянуто выше, разработчики настоящей технологии создают способы и системы для выполнения внешней калибровки лидарной системы 230, чтобы компенсировать по меньшей мере часть множества факторов, вследствие которых данные, обеспеченные посредством лидарной системы 230, могут смещенно использоваться посредством других систем.
[115] Чтобы лучше иллюстрировать это, допустим, что лидарная система 230 устанавливаться сверху транспортного средства 220, как видно на фиг. 3.
[116] Во-первых, следует отметить, что транспортное средство 220 имеет "прямое направление", которое представляет собой направление, в котором транспортное средство 220 движется в ходе работы. Это означает то, что, когда транспортное средство 220 движется строго вперед, транспортное средство 220 движется строго вдоль этого прямого направления. Типично, прямое направление совпадает с продольной осью рамы транспортного средства 220. В некоторых вариантах осуществления продольная ось рамы транспортного средства 220 также может совпадать с осью симметрии транспортного средства 220 таким образом, что участки транспортного средства 220, расположенные на каждой стороне продольной оси рамы, представляют собой зеркальные изображения друг друга.
[117] Во-вторых, следует отметить, что транспортное средство 220 движется в этом прямом направлении на поверхности 280 земли. Поверхность 280 земли, как описано выше, имеет направление 285 нормали, которое представляет собой направление нормали к поверхности 280 земли. Например, по меньшей мере в некоторых случаях, предполагается, что прямое направление транспортного средства 220 может быть ортогональным к направлению 285 нормали к поверхности 280 земли.
[118] В-третьих, следует отметить, что лидарная система 230 имеет систему 1000 координат, которая используется для преобразования множества обнаруженных точек 420 данных в трехмерном пространстве относительно лидарной системы 230. Тем не менее, хотя множество обнаруженных точек 420 данных преобразуются в трехмерном пространстве относительно лидарной системы 230 (в системе 1000 координат), электронное устройство 210 априори не знает, по сути, то, как множество обнаруженных точек 420 данных должны преобразовываться в трехмерном пространстве относительно транспортного средства 220.
[119] Следовательно, во время внешней калибровки лидарной системы 230, электронное устройство 210 может иметь задачу определения, в некотором смысле, "ссылочной информации" относительно транспортного средства 220 и/или окрестностей 250, чтобы преобразовывать множество обнаруженных точек 420 данных относительно транспортного средства 220 (а не только относительно лидарной системы 230).
[120] Чтобы лучше иллюстрировать проблему, ниже описывается пример калибровки в ходе модернизации транспортного средства 220 лидарной системой 230. В ходе модернизации транспортного средства 220 лидарной системой 230, ссылочная информация может первоначально измеряться или иным образом определяться человеком-оператором (например), имеющим задачу монтажа лидарной системы 230 на транспортном средстве 220. Например, когда лидарная система 230 первоначально устанавливается на транспортном средстве 220, человек-оператор может:
- измерять или иным образом определять ось симметрии транспортного средства 220;
- измерять или иным образом определять направление 285 нормали к поверхности 280 земли; и
- устанавливать лидарную систему 230 на транспортном средстве 220 таким образом, что:
(i) одна из осей системы 1000 координат лидарной системы 230 соответствует прямому направлению транспортного средства 220 (например, оси симметрии транспортного средства 220); и
(ii) другая из осей системы 1000 координат лидарной системы 230 соответствует направлению 285 нормали к поверхности 280 земли.
[121] Такой монтаж лидарной системы 230 на транспортном средстве 220 может обеспечивать возможность преобразования обнаруженных точек данных лидарной системы 230 относительно транспортного средства 220 вследствие совпадения (i) некоторых осей системы 1000 координат с (ii) осью симметрии транспортного средства 220 и направлением 285 нормали.
[122] В связи с этим, в некоторых вариантах осуществления в ходе модернизации транспортного средства 220 лидарной системой 230, ссылочная информация относительно транспортного средства 220 (например, ось симметрии транспортного средства 220) и относительно окрестностей 250 (например, направление 285 нормали к поверхности 280 земли) может измеряться или иным образом определяться человеком-оператором и использоваться для того, чтобы преобразовывать обнаруженные точки данных лидарной системы 230 относительно транспортного средства 220.
[123] Тем не менее, в ходе работы транспортного средства 220, лидарная система 230 может непреднамеренно смещаться относительно транспортного средства 220. В одном неограничивающем примере транспортное средство 220 может сталкиваться с "ухабом" на дороге, по которой оно движется. Движение поверх этого "ухаба" может смещать лидарную систему 230 относительно транспортного средства 220, что приводит к непреднамеренному несовпадению между (i) осями системы 1000 координат лидарной системы 230 и (ii) осью симметрии транспортного средства 220 и направлением 285 нормали к поверхности 280 земли (например, ссылочной информацией). Следует отметить, что другие факторы, такие как погода, например, могут приводить этому непреднамеренному несовпадению в ходе работы транспортного средства 220.
[124] В связи с этим, разработчики настоящей технологии создали системы и способы, которые по меньшей мере в некоторых вариантах осуществления настоящей технологии используются посредством электронного устройства 210 для того, чтобы определять, в ходе работы транспортного средства 220, ссылочную информацию относительно транспортного средства 220 (например, ось симметрии транспортного средства 220) и относительно окрестностей 250 (например, направление 285 нормали к поверхности 280 земли) для преобразования обнаруженных точек данных лидарной системы 230 относительно транспортного средства 220, и после этого использовать обнаруженные точки данных лидарной системы 230, преобразованные относительно транспортного средства 220, для управления/маневрирования транспортным средством 220.
[125] Со ссылкой на фиг. 10 по меньшей мере в некоторых вариантах осуществления настоящей технологии электронное устройство 210 может быть выполнено с возможностью, в ходе работы транспортного средства 220:
(i) определять направление 285 нормали к поверхности 280 земли в системе 1000 координат лидарной системы 230 (например, ссылочную информацию относительно окрестностей 250)
(ii) определять первое угловое смещение 1050 между направлением 285 нормали и одной из осей системы 1000 координат (например, осью Z, как проиллюстрировано);
(iii) на основе первого углового смещения 1050, определять первое правило 1060 вращательного сдвига для привязки (например, совмещения) одной из осей системы 1000 координат с направлением 285 нормали,
- за счет этого вращая множество обнаруженных точек 420 данных в направлении первой стрелки 1070;
(iv) определять ось 800 симметрии транспортного средства 220 в системе 1000 координат лидарной системы 230 (например, ссылочную информацию относительно транспортного средства 220);
(v) определять второе угловое смещение 1080 между осью 800 симметрии транспортного средства 220 и другой из осей системы 1000 координат (например, осью X, как проиллюстрировано); и
(vi) на основе второго углового смещения 1080, определять второе правило 1090 вращательного сдвига для привязки (например, совмещения) другой из осей системы 1000 координат с осью 800 симметрии транспортного средства 220,
- за счет этого вращая множество обнаруженных точек 420 данных в направлении второй стрелки 1100.
[126] Следовательно, даже если лидарная система 230 непреднамеренно смещается относительно транспортного средства 220 в ходе работы, электронное устройство 210 может выполнять вышеуказанные этапы для внешней калибровки лидарной системы 230, т.е. в этом случае, преобразовывать множество обнаруженных точек 420 данных лидарной системы 230 относительно транспортного средства 220. Другими словами, электронное устройство 210 может быть выполнено с возможностью выполнять вышеуказанные этапы для компенсации непреднамеренного смещения лидарной системы 230 относительно транспортного средства 220 в ходе работы.
[127] С другой стороны, как пояснено выше, внешняя калибровка используется не для того, чтобы компенсировать неправильное функционирование или анормальное функционирование лидарной системы 230, а вместо этого, для того, чтобы компенсировать другие факторы (такие как, например, непреднамеренно измененная позиционная взаимосвязь между лидарной системой 230 и транспортным средством 220) таким образом, что обнаруженные точки данных лидарной системы 230 не используются смещенно посредством электронного устройства 210 для управления/маневрирования транспортным средством 220.
[128] Таким образом, можно сказать, что разработчики настоящей технологии создают способы и устройства для внешней калибровки лидарной системы 230 с использованием (i) первого углового смещения 1050 между одной из осей системы 1000 координат лидарной системы 230 и направлением 285 нормали и (ii) второго углового смещения 1080 между другой из осей системы 1000 координат лидарной системы 230 и осью 800 симметрии транспортного средства 220.
[129] Предполагается, что первое угловое смещение 1050 и/или второе угловое смещение 1080 могут непрерывно определяться, в реальном времени, в ходе работы транспортного средства 220 (по возможности). В некоторых вариантах осуществления это может обеспечивать возможность электронному устройству 210 непрерывно компенсировать, в реальном времени, непреднамеренное смещение лидарной системы 230 относительно транспортного средства 220.
[130] Как упомянуто выше, предполагается, что в некоторых вариантах осуществления настоящей технологии электронное устройство 210 может быть выполнено с возможностью определять ссылочную информацию относительно транспортного средства 220 и/или окрестностей 250. Другими словами, электронное устройство 210 может быть выполнено с возможностью, в ходе работы транспортного средства 220, определять (i) ось 800 симметрии транспортного средства 220 и (ii) направление 285 нормали к поверхности 280 земли. Ниже описывается то, как электронное устройство 210 может быть выполнено с возможностью определять направление 285 нормали, первое угловое смещение 1050, ось симметрии транспортного средства 220 и второе угловое смещение 1080 для выполнения внешней калибровки лидарной системы 230.
Определение направления нормали к поверхности земли
[131] В некоторых вариантах осуществления настоящей технологии электронное устройство 210 может быть выполнено с возможностью использовать информацию по меньшей мере относительно части множества обнаруженных точек 420 данных, проиллюстрированных на фиг. 4, чтобы определять направление 285 нормали к поверхности 280 земли.
[132] В некоторых вариантах осуществления электронное устройство 210 может быть выполнено с возможностью получать множество обнаруженных точек 420 данных и может быть выполнено с возможностью отфильтровывать обнаруженные точки данных, которые не соответствуют поверхности 280 земли, и/или определять то, какие обнаруженные точки данных из множества обнаруженных точек 420 данных соответствуют поверхности 280 земли.
[133] Это может выполняться посредством электронного устройства 210 множеством способов. Только в качестве примера, обнаруженные точки данных, соответствующие поверхности 280 земли, могут совместно использовать по меньшей мере одну аналогичную характеристику, такую как, но не только, расположение в трехмерном пространстве в общей двумерной плоскости. В связи с этим, электронное устройство 210 может быть выполнено с возможностью определять направление 285 нормали в качестве направления нормали этой общей двумерной плоскости в системе 1000 координат лидарной системы 230.
[134] Тем не менее, также предполагается, что направление 285 нормали может определяться посредством электронного устройства 210 в системе 1000 координат в соответствии с известными технологиями в данной области техники.
Определение ось симметрии транспортного средства
[135] Со ссылкой на фиг. 5 проиллюстрировано множество компьютеризированных операций 500, которые электронное устройство 210 может быть выполнено с возможностью выполнять для определения оси 800 симметрии транспортного средства 220. Множество компьютеризированных операций 500 содержат: (i) операцию 502 фильтрации, (ii) операцию 504 зеркалирования, (iii) операцию 506 проецирования, (iv) операцию 508 идентификации расположенных симметрично напротив обнаруженных точек данных (SODDPI) и (v) операцию 510 идентификации осей. Ниже по очереди поясняются множество компьютеризированных операций 500.
[136] Как упомянуто выше, лидарная система 230 выполнена с возможностью формировать множество обнаруженных точек 420 данных, которые вместе представляют многомерную карту объектов в окрестностях лидарной системы 230 (включающую в себя внешнюю поверхность транспортного средства 220, поверхность 280 земли и другие потенциальные объекты). Электронное устройство 210 может быть выполнено с возможностью получать данные, указывающие множество обнаруженных точек 420 данных, от лидарной системы 230.
[137] В некоторых вариантах осуществления электронное устройство 210 может быть выполнено с возможностью выполнять операцию 502 фильтрации для множества обнаруженных точек 420 данных. Вообще говоря, выполнение операции 502 фильтрации может обеспечивать возможность электронному устройству 210 определять поднабор 600 обнаруженных точек данных, проиллюстрированный на фиг. 6, из множества обнаруженных точек 420 данных, обеспеченных посредством лидарной системы 230, который представляет внешнюю поверхность транспортного средства 220.
[138] Следует отметить, что для простоты, (i) общее число обнаруженных точек данных в поднаборе 600 обнаруженных точек данных, которые представляют внешнюю поверхность транспортного средства 220 (как проиллюстрировано на фиг. 6), уменьшается по сравнению с (ii) общим числом обнаруженных точек данных во множестве обнаруженных точек 420 данных, которые представляют внешнюю поверхность транспортного средства 220 (как проиллюстрировано на фиг. 4).
[139] В некоторых случаях, операция 502 фильтрации может реализовываться в соответствии с известными технологиями. Тем не менее по меньшей мере в некоторых вариантах осуществления электронное устройство 210 может быть выполнено с возможностью выполнять операцию 502 фильтрации посредством применения правила аппроксимации к данному множеству обнаруженных точек данных лидарной системы 230. Например, правило аппроксимации может содержать индикацию пороговой дистанции, которая, как считается, включает в себя поднабор 600 обнаруженных точек данных (например, пороговой дистанции, которая, как считается, включает в себя внешнюю поверхность транспортного средства 220). Следовательно, обнаруженные точки данных из множества обнаруженных точек 420 данных лидарной системы 230, находящиеся в пределах пороговой дистанции от лидарной системы 230, могут идентифицироваться посредством электронного устройства 210 как представляющие собой часть поднабора 600 обнаруженных точек данных.
[140] Независимо от того, как реализуется операция 502 фильтрации, следует отметить, что цель операции 502 фильтра состоит в том, чтобы идентифицировать то, какие обнаруженные точки данных из окрестностей лидарной системы 230 соответствуют внешней поверхности транспортного средства 220.
[141] Тем не менее, в других вариантах осуществления операция 502 фильтрации может выполняться одновременно с тем, когда электронное устройство 210 выполнено с возможностью отфильтровывать обнаруженные точки данных, которые не соответствуют поверхности 280 земли, и/или определять то, какие обнаруженные точки данных из множества обнаруженных точек 420 данных соответствуют поверхности 280 земли. Другими словами, электронное устройство 210 может быть выполнено с возможностью определять одновременно из множества обнаруженных точек 420 данных то, (i) какие обнаруженные точки данных соответствуют поверхности 280 земли, и то, (ii) какие обнаруженные точки данных должны быть включены в поднабор обнаруженных точек данных, представляющих внешнюю поверхность транспортного средства 220.
[142] Также предполагается, что по меньшей мере в некоторых вариантах осуществления операция 502 фильтрации может быть необязательной и в силу этого опускаться из множества компьтерно-реализованных операций 500, которые электронное устройство 210 выполняет для определения оси 800 симметрии транспортного средства 220.
[143] В целом, следует отметить, что способ, которым электронное устройство 210 выбирает/определяет поднабор 600 обнаруженных точек данных, представляющий внешнюю поверхность транспортного средства 220, из множества обнаруженных точек 420 данных, не ограничен конкретным образом.
[144] В некоторых вариантах осуществления настоящей технологии электронное устройство 210 также может быть выполнено с возможностью обеспечивать индикацию к увеличению внешней поверхности транспортного средства 220. В одном неограничивающем примере электронное устройство 210 может быть выполнено с возможностью обеспечивать такую индикацию человеку-оператору во время внешней калибровки лидарной системы 230. Предполагается, что электронное устройство 210 может быть выполнено с возможностью обеспечивать такую индикацию по множеству причин, таких как, например, в ответ на определение посредством электронного устройства 210 того, что поднабор 600 обнаруженных точек данных не включает в себя минимальное пороговое число точек данных.
[145] Такая индикация к увеличению внешней поверхности транспортного средства 220, может обеспечиваться в различных формах посредством электронного устройства 210. В одном варианте осуществления обеспечение индикации к увеличению внешней поверхности транспортного средства 220, может содержать выполнение электронного устройства 210 с возможностью обеспечивать индикации к полному открытию расположенных напротив дверей транспортного средства 220. В другом варианте осуществления обеспечение индикации к увеличению внешней поверхности транспортного средства 220 может содержать выполнение электронного устройства 210 с возможностью обеспечить индикацию к полному открытию багажника транспортного средства 220.
[146] Возвращаясь к фиг 5, как упомянуто выше, электронное устройство 210 также выполнено с возможностью выполнять операцию 504 зеркалирования. Вообще говоря, электронное устройство 210 может быть выполнено с возможностью выполнять операцию 504 зеркалирования для формирования поднабора 650 точек данных зеркального изображения на основе поднабора 600 обнаруженных точек данных (см. фиг. 6). Следует отметить, что электронное устройство 210 с использованием операции 504 зеркалирования может формировать поднабор 650 точек данных зеркального изображения таким образом, что поднабор 650 точек данных зеркального изображения представляет зеркальное изображение внешней поверхности транспортного средства 220.
[147] Предполагается, что посредством выполнения операции 504 зеркалирования, электронное устройство 210 может быть выполнено с возможностью формировать поднабор 650 точек данных зеркального изображения в многомерном пространстве, идентичном многомерному пространству поднабора 600 обнаруженных точек данных. Другими словами, после того как операция 504 зеркалирования выполняется посредством электронного устройства 210, электронное устройство 210 может иметь доступ как (i) к поднабору 600 обнаруженных точек данных, представляющему внешнюю поверхность транспортного средства 220, так и (ii) к поднабору 650 точек данных зеркального изображения, представляющему зеркальное изображение внешней поверхности транспортного средства 220, в идентичном многомерном пространстве.
[148] Чтобы лучше иллюстрировать это, на фиг. 6, проиллюстрирована виртуальная ось 680 зеркалирования, которую электронное устройство 210 может использовать для того, чтобы формировать поднабор 650 точек данных зеркального изображения на основе поднабора 600 обнаруженных точек данных во время операции 504 зеркалирования. То, как электронное устройство 210 определяет то, что виртуальная ось 680 зеркалирования, не является ограничивающим. Также следует отметить, что виртуальная ось 680 зеркалирования проиллюстрирована только в качестве иллюстрации, и по сути, предполагается, что электронное устройство 210 не обязательно выполнено с возможностью подготавливать посредством рендеринга визуальное изображение виртуальной оси 680 зеркалирования.
[149] Как можно видеть поднабор 600 обнаруженных точек данных включает в себя обнаруженные точки 601, 602, 603, 604, 606 и 607 данных. Электронное устройство 210 может быть выполнено с возможностью использовать виртуальную ось 680 зеркалирования для формирования поднабора 650 точек данных зеркального изображения таким образом, что:
- точка 657 данных зеркального изображения из поднабора 650 точек данных зеркального изображения формируется на основе обнаруженных точек 607 данных;
- точка 656 данных зеркального изображения из поднабора 650 точек данных зеркального изображения формируется на основе обнаруженных точек 606 данных;
- точка 655 данных зеркального изображения из поднабора 650 точек данных зеркального изображения формируется на основе обнаруженных точек 605 данных;
- точка 654 данных зеркального изображения из поднабора 650 точек данных зеркального изображения формируется на основе обнаруженных точек 604 данных;
- точка 653 данных зеркального изображения из поднабора 650 точек данных зеркального изображения формируется на основе обнаруженных точек 603 данных;
- точка 652 данных зеркального изображения из поднабора 650 точек данных зеркального изображения формируется на основе обнаруженных точек 602 данных; и
- точка 651 данных зеркального изображения из поднабора 650 точек данных зеркального изображения формируется на основе обнаруженных точек 601 данных.
[150] После того как поднабор 650 точек данных зеркального изображения формируется посредством электронного устройства 210, электронное устройство 210 также выполнено с возможностью выполнять операцию 506 проецирования (см. фиг. 5). Вообще говоря, электронное устройство 210 может быть выполнено с возможностью выполнять операцию 506 проецирования для поднабора 650 точек данных зеркального изображения таким образом, что поднабор 650 точек данных зеркального изображения, в некотором смысле, "перекрывает" поднабор 600 обнаруженных точек данных. Другими словами, электронное устройство 210 может быть выполнено с возможностью выполнять операцию 506 проецирования для задания данных пар перекрывающихся точек данных между (i) поднабором 600 обнаруженных точек данных и (ii) поднабором 650 точек данных зеркального изображения, когда поднабор 650 точек данных зеркального изображения перекрывает поднабор 600 обнаруженных точек данных.
[151] Предполагается, что во время операции 506 проецирования, электронное устройство 210 может быть выполнено с возможностью итеративно минимизировать дистанцию между поднабором 600 обнаруженных точек данных и поднабором 650 точек данных зеркального изображения (например, дистанцию между поднаборами 600 и 650 в целом) до тех пор, пока поднабор 650 точек данных зеркального изображения не перекроет поднабор 600 обнаруженных точек данных. Например, в некоторых вариантах осуществления в качестве части операции 506 проецирования, электронное устройство 210 может быть выполнено с возможностью применять итеративный алгоритм ближайших точек (ICP) для итеративной минимизации дистанции между поднабором 600 обнаруженных точек данных и поднабором 650 точек данных зеркального изображения.
[152] В некоторых вариантах осуществления настоящей технологии предполагается, что итеративная минимизация дистанции между поднабором 600 обнаруженных точек данных и поднабором 650 точек данных зеркального изображения может содержать выполнение электронного устройства 210 с возможностью задавать правило преобразования между поднабором 600 обнаруженных точек данных и поднабором 650 точек данных зеркального изображения таким образом, чтобы перекрывать данную точку данных зеркального изображения из поднабора 650 точек данных зеркального изображения с данной обнаруженной точкой данных из поднабора 600 обнаруженных точек данных.
[153] Чтобы лучше иллюстрировать это, со ссылкой на фиг. 7 проиллюстрирован вывод 700 операции 506 проецирования. Следует отметить, что вывод 700 проиллюстрирован на фиг. 7 только в качестве иллюстрации, и что электронное устройство 210 не обязательно выполнено с возможностью подготавливать посредством рендеринга такое визуальное изображение вывода 700.
[154] Как можно видеть из вывода 700, поднабор 650 точек данных зеркального изображения перекрывает поднабор 600 обнаруженных точек данных. Когда поднабор 650 точек данных зеркального изображения перекрывает поднабор 600 обнаруженных точек данных, электронное устройство 210 в силу этого задает данные пары перекрывающихся точек данных между (i) поднабором 600 обнаруженных точек данных и (ii) поднабором 650 точек данных зеркального изображения, такие как:
- первая пара 701 перекрывающихся точек данных, включающая в себя (i) обнаруженную точку 601 данных и (ii) точку 657 данных зеркального изображения;
- вторая пара 702 перекрывающихся точек данных, включающая в себя (i) обнаруженную точку 603 данных и (ii) точку 656 данных зеркального изображения;
- третья пара 703 перекрывающихся точек данных, включающая в себя (i) обнаруженную точку 604 данных и (ii) точку 655 данных зеркального изображения;
- четвертая пара 704 перекрывающихся точек данных, включающая в себя (i) обнаруженную точку 605 данных и (ii) точку 654 данных зеркального изображения;
- пятая пара 705 перекрывающихся точек данных, включающая в себя (i) обнаруженную точку 606 данных и (ii) точку 653 данных зеркального изображения; и
- шестая пара 706 перекрывающихся точек данных, включающая в себя (i) обнаруженную точку 607 данных и (ii) точку 651 данных зеркального изображения.
[155] Как упомянуто выше, этот вывод 700 может формироваться посредством электронного устройства 210, итеративно минимизирующего дистанцию между поднабором 600 обнаруженных точек данных и поднабором 650 точек данных зеркального изображения в идентичном многомерном пространстве. Другими словами, электронное устройство 210 может быть выполнено с возможностью выполнять последовательность вычислительных итераций для того, чтобы формировать вывод 700, при этом, во время каждой итерации из последовательности вычислительных итераций, электронное устройство 210 имеет задачу минимизации дистанции между поднабором 600 обнаруженных точек данных и поднабором 650 точек данных зеркального изображения в идентичном многомерном пространстве. С другой стороны, как упомянуто выше по меньшей мере в некоторых вариантах осуществления настоящей технологии формирование данных, указывающих вывод 700, может достигаться посредством электронного устройства 210 с использованием ICP-алгоритма.
[156] Следует отметить, что в некоторых случаях, не все обнаруженные точки данных из поднабора 600 обнаруженных точек данных должны перекрываться посредством соответствующих точек данных зеркального изображения из поднабора 650 точек данных зеркального изображения после операции 506 проецирования. Например, как проиллюстрировано на фиг. 7, обнаруженная точка 602 данных из поднабора 600 обнаруженных точек данных не перекрывается посредством какой-либо точки данных зеркального изображения из поднабора 650 точек данных зеркального изображения.
[157] Это также означает, что, в некоторых случаях, не все точки данных зеркального изображения из поднабора 650 точек данных зеркального изображения должны перекрывать соответствующую обнаруженную точку данных из поднабора 600 обнаруженных точек данных после операции 506 проецирования. Например, как проиллюстрировано, точка 652 данных зеркального изображения из поднабора 650 точек данных зеркального изображения не перекрывает обнаруженные точки данных из поднабора 600 обнаруженных точек данных.
[158] Тем не менее, электронное устройство 210 с использованием операции 506 проецирования может быть выполнено с возможностью итеративно минимизировать дистанцию между поднабором 600 обнаруженных точек данных и поднабором 700 точек данных зеркального изображения до тех пор, пока пороговое число и/или пороговое количественное отношение обнаруженных точек данных из поднабора 600 обнаруженных точек данных не перекроется посредством соответствующих точек данных зеркального изображения из поднабора 700 точек данных зеркального изображения. Предполагается, что это пороговое число и/или это пороговое количественное отношение обнаруженных точек данных могут быть предварительно определены человеком-оператором по меньшей мере в некоторых вариантах осуществления настоящей технологии.
[159] Следует отметить, что посредством выполнения операции 506 проецирования, как пояснено выше, электронное устройство 210 задает пары 701, 702, 703, 704, 705 и 706 перекрывающихся точек данных. Также следует отметить, что точки данных в любой данной паре перекрывающихся точек данных, заданной таким способом посредством электронного устройства 210, имеют конкретную взаимосвязь между собой.
[160] Взаимосвязь между точками данных в любой данной паре перекрывающихся точек данных является следующей: любая данная пара перекрывающихся точек данных, заданная посредством электронного устройства 210, выполняющего операцию 506 проецирования, включает в себя (i) первую точку данных из поднабора 600 обнаруженных точек данных и (ii) вторую точку данных из поднабора 650 точек данных зеркального изображения, и таким образом, что вторая точка данных представляет собой зеркальное изображение третьей точки данных из поднабора 600 обнаруженных точек данных, которая располагается симметрично напротив первой точки данных в поднаборе 600 обнаруженных точек данных.
[161] Чтобы лучше иллюстрировать эту взаимосвязь, рассмотрим пример первой пары 701 перекрывающихся точек данных. Как упомянуто выше, пара 701 перекрывающихся точек данных включает в себя (i) первую точку данных, представляющую собой обнаруженную точку 601 данных из поднабора 600 обнаруженных точек данных, и (ii) вторую точку данных, представляющую собой точку 657 данных зеркального изображения из поднабора 650 точек данных зеркального изображения. Напомним, что точка 657 данных зеркального изображения формируется в качестве зеркального изображения обнаруженной точки 607 данных (т.е. третьей точки данных, связанной с первой парой 701 перекрывающихся точек данных), и поскольку точка 657 данных зеркального изображения перекрывает обнаруженную точку 601 данных, обнаруженная точка 607 данных (т.е. третья точка данных) должна представлять собой расположенную симметрично напротив обнаруженную точку данных по отношению к обнаруженной точке 601 данных в поднаборе 600 обнаруженных точек данных.
[162] Другими словами, взаимосвязь между точками данных в данной паре перекрывающихся точек данных также может поясняться следующим образом: если обнаруженная точка 607 данных (т.е. третья точка данных) не располагается симметрично напротив обнаруженной точки 601 данных в поднаборе 600 обнаруженных точек данных, посредством формирования точки 657 данных зеркального изображения (т.е. второй точки данных в первой паре 701 перекрывающихся точек данных) через операцию 504 зеркалирования и затем проецирования точки 657 данных зеркального изображения через операцию 506 проецирования, данные 657 зеркального изображения не должны перекрывать обнаруженную точку 601 данных (т.е. первую точку данных в первой паре 701 перекрывающихся точек данных).
[163] Следовательно, можно сказать, что если данная пара перекрывающихся точек данных задается через электронное устройство 210, выполняющее операцию 506 проецирования, то обнаруженная точка данных (т.е. первая точка данных) в этой данной паре перекрывающихся точек данных должна располагаться симметрично напротив другой обнаруженной точки данных (т.е. третьей точки данных) в поднаборе 600 обнаруженных точек данных, и что эта другая обнаруженная точка данных представляет собой точку данных, на основе которой сформирована точка данных зеркального изображения (т.е. вторая точка данных) в этой данной паре перекрывающихся точек данных.
[164] Следует отметить, что эта взаимосвязь между точками данных в данной паре перекрывающихся точек данных присутствует в каждой из пар 701, 702, 703, 704, 705 и 706 перекрывающихся точек данных, как проиллюстрировано в неограничивающем примере по фиг. 7. Это означает то, что:
- поскольку вторая пара 702 перекрывающихся точек данных задается посредством операции 506 проецирования, в таком случае обнаруженная точка 603 данных (первая точка данных во второй паре 702 перекрывающихся точек данных) располагается симметрично напротив обнаруженной точки 606 данных в поднаборе 600 обнаруженных точек данных, на основе которого сформирована точка 656 данных зеркального изображения (вторая точка данных во второй паре 702 перекрывающихся точек данных);
- поскольку третья пара 703 перекрывающихся точек данных задается посредством операции 506 проецирования, в таком случае обнаруженная точка 604 данных (первая точка данных в третьей паре 703 перекрывающихся точек данных) располагается симметрично напротив обнаруженной точки 605 данных в поднаборе 600 обнаруженных точек данных, на основе которого сформирована точка 655 данных зеркального изображения (вторая точка данных в третьей паре 703 перекрывающихся точек данных);
- поскольку четвертая пара 704 перекрывающихся точек данных задается посредством операции 506 проецирования, в таком случае обнаруженная точка 605 данных (первая точка данных в четвертой паре 704 перекрывающихся точек данных) располагается симметрично напротив обнаруженной точки 604 данных в поднаборе 600 обнаруженных точек данных, на основе которого сформирована точка 654 данных зеркального изображения (вторая точка данных в четвертой паре 704 перекрывающихся точек данных);
- поскольку пятая пара 705 перекрывающихся точек данных задается посредством операции 506 проецирования, в таком случае обнаруженная точка 606 данных (первая точка данных в пятой паре 705 перекрывающихся точек данных) располагается симметрично напротив обнаруженной точки 603 данных в поднаборе 600 обнаруженных точек данных, на основе которого сформирована точка 653 данных зеркального изображения (вторая точка данных в пятой паре 705 перекрывающихся точек данных); и
- поскольку шестая пара 706 перекрывающихся точек данных задается посредством операции 506 проецирования, в таком случае обнаруженная точка 607 данных (первая точка данных в шестой паре 706 перекрывающихся точек данных) располагается симметрично напротив обнаруженной точки 601 данных в поднаборе 600 обнаруженных точек данных, на основе которого сформирована точка 651 данных зеркального изображения (вторая точка данных в паре 706).
[165] Предполагается, что эта взаимосвязь между точками данных в соответствующих парах 701, 702, 703, 704, 705 и 706 перекрывающихся точек данных может быть использована посредством электронного устройства 210 для определения оси симметрии транспортного средства 220. Например, электронное устройство 210 может быть выполнено с возможностью выполнять SODDPI-операцию 508 (см. фиг. 5), в ходе которой электронное устройство 210 может использовать эту взаимосвязь между точками данных в соответствующих парах 701, 702, 703, 704, 705 и 706 перекрывающихся точек данных.
[166] Вообще говоря, в ходе SODDPI-операции 508, электронное устройство 210 выполнено с возможностью определять то, какие обнаруженные точки данных в поднаборе 600 обнаруженных точек данных располагаются симметрично напротив друг друга в поднаборе 600 обнаруженных точек данных. Как упомянуто выше, после того как пары 701, 702, 703, 704, 705 и 706 перекрывающихся точек данных задаются посредством операции 506 проецирования, электронное устройство 210 может быть выполнено с возможностью определять в ходе SODDPI-операции 508 то, что:
- обнаруженные точки 601 и 607 данных представляют собой расположенные симметрично напротив точки данных в поднаборе 600 обнаруженных точек данных;
- обнаруженные точки 603 и 606 данных представляют собой расположенные симметрично напротив точки данных в поднаборе 600 обнаруженных точек данных; и
- обнаруженные точки 604 и 605 данных представляют собой расположенные симметрично напротив точки данных в поднаборе 600 обнаруженных точек данных.
[167] Справедливо и то, что в некоторых вариантах осуществления настоящей технологии электронное устройство 210 может выполнять SODDPI-операцию 508, чтобы определять то, какие обнаруженные точки данных в поднаборе 600 обнаруженных точек данных не имеют расположенных симметрично напротив обнаруженных точек данных в поднаборе 600 обнаруженных точек данных.
[168] Чтобы лучше иллюстрировать это, рассмотрим пример обнаруженной точки 602 данных. Следует отметить, что обнаруженная точка 602 данных не составляет часть какой-либо пары перекрывающихся точек данных, которые заданы в результате операции 506 проецирования. Другими словами, обнаруженная точка 602 данных не перекрывается посредством какой-либо точки данных зеркального изображения из поднабора 650 точек данных зеркального изображения. В этом случае, электронное устройство 210 может быть выполнено с возможностью определять в ходе SODDPI-операции 508 то, что обнаруженная точка 602 данных не имеет расположенной симметрично напротив обнаруженной точки данных в поднаборе 600 обнаруженных точек данных, поскольку, в противном случае, обнаруженная точка 602 данных должна перекрываться посредством зеркального изображения этой расположенной симметрично напротив обнаруженной точки данных после операции 506 проецирования.
[169] В общих словах, в ходе SODDPI-операции 508, электронное устройство 210 может быть выполнено с возможностью определять то, какие обнаруженные точки данных в поднаборе обнаруженных точек данных имеют расположенные симметрично напротив обнаруженные точки данных в поднаборе 600 обнаруженных точек данных (и, необязательно, то, какие обнаруженные точки данных не имеют расположенных симметрично напротив обнаруженных точек данных).
[170] В некоторых вариантах осуществления настоящей технологии электронное устройство 210 может быть выполнено с возможностью использовать эту информацию относительно того, какие обнаруженные точки данных имеют расположенные симметрично напротив обнаруженные точки данных в поднаборе 600 обнаруженных точек данных, для того, чтобы выполнять операцию 510 определения осей для определения оси симметрии транспортного средства 220. Ниже описывается то, как электронное устройство 210 выполнено с возможностью выполнять процедуру 510 определения осей, со ссылкой фиг. 8.
[171] В качестве части операции 510 определения осей, электронное устройство 210 может быть выполнено с возможностью выбирать данную пару расположенных симметрично напротив обнаруженных точек данных и определять данную среднюю точку из них в многомерном пространстве. Например, электронное устройство 210 может быть выполнено с возможностью выбирать обнаруженные точки 604 и 605 данных (которые располагаются симметрично напротив друг друга в поднаборе 600 обнаруженных точек данных) и может быть выполнено с возможностью определять первую среднюю точку 802. В другом примере электронное устройство 210 может быть выполнено с возможностью выбирать обнаруженные точки 603 и 606 данных (которые располагаются симметрично напротив друг друга в поднаборе 600 обнаруженных точек данных) и может быть выполнено с возможностью определять вторую среднюю точку 804. В дополнительном примере электронное устройство 210 может быть выполнено с возможностью выбирать обнаруженные точки 601 и 607 данных (которые располагаются симметрично напротив друг друга в поднаборе 600 обнаруженных точек данных) и может быть выполнено с возможностью определять третью среднюю точку 806.
[172] Также в качестве части процедуры 510 определения осей, электронное устройство 210 также может быть выполнено с возможностью определять данную линию, которая проходит через средние точки соответствующих пар расположенных симметрично напротив обнаруженных точек данных. Другими словами, электронное устройство 210 может быть выполнено с возможностью определять данную линию через любую комбинацию по меньшей мере двух из (i) первой средней точки 802, (ii) вторых средних точек 804 и (iii) третьей средней точки 806. Как результат, данная линия может использоваться посредством электронного устройства 210 в качестве оси 800 симметрии транспортного средства 220.
[173] Предполагается, что электронное устройство 210 может быть выполнено с возможностью определять по меньшей мере две средних точки между соответствующими парами расположенных симметрично напротив обнаруженных точек данных в поднаборе 600 обнаруженных точек данных для того, чтобы определять данную линию, проходящую по меньшей мере через две средних точки, и использовать данную линию в качестве оси симметрии транспортного средства 220.
Калибровка
[174] Как упомянуто выше, электронное устройство 210 может быть выполнено с возможностью использовать направление 285 нормали к поверхности 280 земли и ось 800 симметрии транспортного средства 220 для выполнения внешней калибровки лидарной системы 230. Другими словами, электронное устройство 210 может быть выполнено с возможностью внешне калибровать обнаруженные точки данных лидарной системы 230 посредством использования (i) направления 285 нормали в системе 1000 координат лидарной системы 230 и (ii) оси 800 симметрии в системе 1000 координат лидарной системы 230.
[175] Ниже описывается эта внешняя калибровка, в ходе которой электронное устройство 210 может быть выполнено с возможностью определять внешне калиброванные обнаруженные точки данных лидарной системы 230.
[176] Со ссылкой на фиг. 10, после того как электронное устройство 210 определяет направление 285 нормали в системе 1000 координат лидарной системы 230, электронное устройство 210 может определять первое угловое смещение 1050 в качестве угла между направлением 285 нормали и одной из осей системы 1000 координат (в проиллюстрированном примере осью Z).
[177] Как упомянуто выше, электронное устройство 210 может быть выполнено с возможностью определять первое правило 1060 вращательного сдвига на основе первого углового смещения 1050 для, в некотором смысле, привязки (например, совмещения) одной из осей системы 1000 координат (в проиллюстрированном примере оси Z) с направлением 285 нормали. Посредством определения этого первого правила 1060 вращательного сдвига, электронное устройство 210 выполнено с возможностью вращать множество обнаруженных точек 420 данных в направлении первой стрелки 1070.
[178] Следует отметить, что, после того как одна из осей системы 1000 координат совмещается с направлением нормали, электронное устройство 210 может быть выполнено с возможностью (i) определять ось 800 симметрии транспортного средства 220 и (ii) привязывать (например, совмещать) другую из осей системы 1000 координат (в проиллюстрированном примере ось X) с ней.
[179] После того как электронное устройство 210 определяет ось 800 симметрии транспортного средства 220 в системе 1000 координат лидарной системы 230, как описано выше, электронное устройство 210 может определять второе угловое смещение 1080 в качестве угла между осью 800 симметрии и другой из осей системы 1000 координат (в проиллюстрированном примере осью X).
[180] Как упомянуто выше, электронное устройство 210 может быть выполнено с возможностью определять второе правило 1090 вращательного сдвига на основе второго углового смещения 1080 для, в некотором смысле, привязки (например, совмещения) другой из осей системы 1000 координат (в проиллюстрированном примере оси X) с осью 800 симметрии. Посредством определения этого второго правила 1090 вращательного сдвига, электронное устройство 210 выполнено с возможностью вращать множество обнаруженных точек 420 данных в направлении второй стрелки 1100.
[181] В целом, можно сказать, что электронное устройство 210 может быть выполнено с возможностью определять первое правило 1060 вращательного сдвига (на основе первого углового смещения 1050) и второе правило 1090 вращательного сдвига (на основе второго углового смещения 1050) для привязки одной и еще одной другой из осей системы координат с направлением 285 нормали и с осью 800 симметрии, соответственно. Как результат, электронное устройство 210 может быть выполнено с возможностью использовать первое правило 1060 вращательного сдвига и второе правило 1090 вращательного сдвига для вращения множества обнаруженных точек 420 данных, за счет этого определяя внешне калиброванное множество обнаруженных точек данных лидарной системы 230.
Компьютеризированные способы
[182] В некоторых вариантах осуществления электронное устройство 210 может быть выполнено с возможностью выполнять компьтерно-реализованный способ 900 для калибровки лидарной системы 230. Следует отметить, что в некоторых вариантах осуществления настоящей технологии электронное устройство 210 может быть выполнено с возможностью выполнять другой компьютеризированный способ для определения оси 800 симметрии транспортного средства 220, без отступления от объема настоящей технологии. Следует отметить, что другой компьютеризированный способ для определения оси 800 симметрии транспортного средства 220 может содержать по меньшей мере некоторые этапы компьютеризированного способа 900, которые поясняются ниже по очереди.
Этап 902 - Получение поднабора обнаруженных точек данных
[183] Способ 900 начинается на этапе 902, за счет выполнения электронного устройства 210 с возможностью получать поднабор 600 обнаруженных точек данных, проиллюстрированный на фиг. 6.
[184] В некоторых вариантах осуществления до этапа 902 электронное устройство 210 может быть выполнено с возможностью получать множество обнаруженных точек 420 данных (см. фиг. 4) от лидарной системы 230.
[185] В других вариантах осуществления электронное устройство 210 может быть выполнено с возможностью фильтровать множество обнаруженных точек 420 данных для определения поднабора 600 обнаруженных точек данных. В некоторых случаях, электронное устройство 210 может выполнять такую фильтрацию посредством применения правила аппроксимации, как упомянуто выше, ко множеству обнаруженных точек 420 данных лидарной системы 230. Например, правило аппроксимации может включать в себя индикацию пороговой дистанции, которая, как считается, включает в себя поднабор обнаруженных точек данных.
[186] В других вариантах осуществления до этапа 902 электронное устройство 210 может быть выполнено с возможностью обеспечения индикации к увеличению внешней поверхности транспортного средства 220, посредством (i) обеспечения индикации к полному открытию расположенных напротив дверей транспортного средства 220, и/или (ii) обеспечения индикации к полному открытию багажника транспортного средства 220.
[187] В некоторых вариантах осуществления поднабор 600 обнаруженных точек данных и/или множество обнаруженных точек 420 данных могут получаться в системе 1000 координат лидарной системы 230. Предполагается, что система 1000 координат лидарной системы может иметь три ортогональных оси, как проиллюстрировано на фиг. 10. Тем не менее, в некоторых случаях, предполагается, что множество обнаруженных точек 420 данных и/или поднабор 600 обнаруженных точек данных могут собираться и/или формироваться посредством лидарной системы 230 в системе сферических координат и после этого могут преобразовываться в систему 1000 координат лидарной системы 230, имеющей три ортогональных оси, без отступления от объема настоящей технологии.
[188] Это еще один дополнительный вариант осуществления, электронное устройство 210 также может быть выполнено с возможностью определять направление 285 нормали к поверхности 280 земли на основе множества обнаруженных точек 420 данных лидарной системы 230, как упомянуто выше. Электронное устройство 210 также может быть выполнено с возможностью привязывать одну из осей системы 1000 координат (в проиллюстрированном примере по фиг. 10, ось Z) на основе направления 285 нормали к поверхности 280 земли таким образом, что одна из осей проходит в направлении 285 нормали.
Этап 904 - Формирование поднабора точек данных зеркального изображения
[189] Способ 900 переходит к этапу 904, за счет выполнения электронного устройства 210 с возможностью формировать поднабор 650 точек данных зеркального изображения на основе поднабора 600 обнаруженных точек данных (см. фиг. 6). Как упомянуто выше, поднабор 650 точек данных зеркального изображения представляет зеркальное изображение внешней поверхности транспортного средства 220.
[190] Предполагается, что поднабор 650 точек данных зеркального изображения может формироваться посредством электронного устройства 210 в системе 1000 координат лидарной системы 230. Также предполагается, что поднабор 650 точек данных зеркального изображения может формироваться в многомерном пространстве, идентичном многомерному пространству поднабора 600 обнаруженных точек данных, к примеру, в трехмерном пространстве, идентичном трехмерному пространству поднабора 600 обнаруженных точек данных.
Этап 906 - Проецирование поднабора точек данных зеркального изображения на поднабор обнаруженных точек данных
[191] Способ 900 переходит к этапу 906, за счет выполнения электронного устройства 210 с возможностью проецировать поднабор 650 точек данных зеркального изображения на поднабор 600 обнаруженных точек данных и/или наоборот.
[192] Со ссылкой на фиг. 7 электронное устройство 210 может быть выполнено с возможностью выполнять этап 906 для задания пар перекрывающихся точек данных, таких как:
- первая пара 701 перекрывающихся точек данных, включающая в себя (i) обнаруженную точку 601 данных и (ii) точку 657 данных зеркального изображения;
- вторая пара 702 перекрывающихся точек данных, включающая в себя (i) обнаруженную точку 603 данных и (ii) точку 656 данных зеркального изображения;
- третья пара 703 перекрывающихся точек данных, включающая в себя (i) обнаруженную точку 604 данных и (ii) точку 655 данных зеркального изображения;
- четвертая пара 704 перекрывающихся точек данных, включающая в себя (i) обнаруженную точку 605 данных и (ii) точку 654 данных зеркального изображения;
- пятая пара 705 перекрывающихся точек данных, включающая в себя (i) обнаруженную точку 606 данных и (ii) точку 653 данных зеркального изображения; и
- шестая пара 706 перекрывающихся точек данных, включающая в себя (i) обнаруженную точку 607 данных и (ii) точку 651 данных зеркального изображения.
[193] Следует отметить, что каждая данная пара перекрывающихся точек данных включает в себя (i) первую точку данных из поднабора 600 обнаруженных точек данных и (ii) вторую точку данных из поднабора 650 точек данных зеркального изображения таким образом, что вторая точка данных представляет собой зеркальное изображение третьей точки данных в поднаборе 600 обнаруженных точек данных, которая располагается симметрично напротив первой точки данных.
[194] Предполагается, что этап 906 может содержать итеративную минимизацию, посредством электронного устройства 210, дистанции между поднабором 650 точек данных зеркального изображения и поднабором 600 обнаруженных точек данных. Например, итеративная минимизация может выполняться посредством электронного устройства 210, применяющего ICP-алгоритм.
[195] Следует отметить, что в некоторых вариантах осуществления настоящей технологии итеративная минимизация дистанции посредством электронного устройства 210 может содержать определение правила преобразования между поднабором 650 точек данных зеркального изображения и поднабором 600 обнаруженных точек данных таким образом, чтобы перекрывать данную точку данных зеркального изображения с данной обнаруженной точкой данных, и при этом данная точка данных зеркального изображения сформирована на основе данной другой обнаруженной точки, которая располагается симметрично напротив данной обнаруженной точки данных.
Этап 908 - Использование обнаруженных точек данных для определения оси симметрии транспортного средства
[196] Способ 900 переходит к этапу 902, за счет выполнения электронного устройства 210 с возможностью использовать (i) по меньшей мере две первые точки данных и (ii) по меньшей мере две соответствующие третьи точки данных, которые располагаются симметрично напротив по меньшей мере двух первых точек данных, для определения оси 800 симметрии транспортного средства 220 в системе 1000 координат лидарной системы 230.
[197] Например, как проиллюстрировано на фиг. 8, электронное устройство 210 может быть выполнено с возможностью использовать по меньшей мере два из следующего:
(i) обнаруженные точки 604 данных (данная первая точка данных) и обнаруженная точка 605 данных (соответствующая третья точка данных);
(ii) обнаруженные точки 603 данных (данная первая точка данных) и обнаруженная точка 606 данных (соответствующая третья точка данных); и
(iii) обнаруженные точки 601 данных (данная первая точка данных) и обнаруженная точка 607 данных (соответствующая третья точка данных).
[198] Следует отметить, что, как пояснено выше:
- обнаруженные точки 601 и 607 данных представляют собой расположенные симметрично напротив точки данных в поднаборе 600 обнаруженных точек данных;
- обнаруженные точки 603 и 606 данных представляют собой расположенные симметрично напротив точки данных в поднаборе 600 обнаруженных точек данных; и
- обнаруженные точки 604 и 605 данных представляют собой расположенные симметрично напротив точки данных в поднаборе 600 обнаруженных точек данных.
[199] Следует отметить, что по меньшей мере в некоторых вариантах осуществления настоящей технологии использование (i) по меньшей мере двух первых точек данных и (ii) по меньшей мере двух соответствующих третьих точек данных, которые располагаются симметрично напротив по меньшей мере двух первых точек данных, для определения оси 800 симметрии транспортного средства 220 может содержать выбор (i) по меньшей мере двух первых точек данных и (ii) по меньшей мере двух соответствующих третьих точек данных, которые располагаются симметрично напротив по меньшей мере двух первых точек данных. После этого, для каждой пары (i) из по меньшей мере двух первых точек данных и (ii) по меньшей мере двух соответствующих третьих точек данных электронное устройство 210 может быть выполнено с возможностью определять соответствующую среднюю точку.
[200] Например, электронное устройство 210 может быть выполнено с возможностью выбирать обнаруженные точки 604 и 605 данных (которые располагаются симметрично напротив друг друга в поднаборе 600 обнаруженных точек данных) и может быть выполнено с возможностью определять первую среднюю точку 802. В другом примере электронное устройство 210 может быть выполнено с возможностью выбирать обнаруженные точки 603 и 606 данных (которые располагаются симметрично напротив друг друга в поднаборе 600 обнаруженных точек данных) и может быть выполнено с возможностью определять вторую среднюю точку 804. В дополнительном примере электронное устройство 210 может быть выполнено с возможностью выбирать обнаруженные точки 601 и 607 данных (которые располагаются симметрично напротив друг друга в поднаборе 600 обнаруженных точек данных) и может быть выполнено с возможностью определять третью среднюю точку 806.
[201] В некоторых вариантах осуществления электронное устройство 210 также может быть выполнено с возможностью определять данную линию, которая проходит через средние точки соответствующих пар расположенных симметрично напротив обнаруженных точек данных. Другими словами, электронное устройство 210 может быть выполнено с возможностью определять данную линию через любую комбинацию по меньшей мере двух из (i) первой средней точки 802, (ii) вторых средних точек 804 и (iii) третьей средней точки 806. Как результат, данная линия может использоваться посредством электронного устройства 210 в качестве оси 800 симметрии транспортного средства 220.
[202] Предполагается, что электронное устройство 210 может быть выполнено с возможностью определять по меньшей мере две средних точки между соответствующими парами расположенных симметрично напротив обнаруженных точек данных в поднаборе 600 обнаруженных точек данных для того, чтобы определять данную линию, проходящую по меньшей мере через две средних точки, и использовать данную линию в качестве оси симметрии транспортного средства 220.
Этап 910 - Калибровка лидарной системы
[203] Способ 900 переходит к этапу 910 за счет выполнения электронного устройства 210 с возможностью использования для лидарной системы 230 данного углового смещения между осью 800 симметрии транспортного средства 220 и другой из осей системы 1000 координат лидарной системы 230.
[204] Со ссылкой на фиг. 10 в способе 900 электронное устройство 210 может быть выполнено с возможностью определять второе угловое смещение 1080 между осью 800 симметрии транспортного средства 220 (например, данного SDV) и одной из осей системы 1000 координат лидарной системы 230 (в проиллюстрированном примере, осью X).
[205] В некотором варианте осуществления электронное устройство 210 может быть выполнено с возможностью определять правило вращательного сдвига 1090 на основе второго углового смещения 1080 для вращения используемых обнаруженных точек данных лидарной системы 230 (например, множества обнаруженных точек 420 данных). В связи с этим, электронное устройство 210 в силу этого выполнено с возможностью определять внешне калиброванные используемые обнаруженные точки данных лидарной системы 230.
[206] Дополнительно предполагается, что способ 900 дополнительно итеративно повторяется посредством электронного устройства 210 в ходе работы транспортного средства 220. В связи с этим электронное устройство 210 может быть дополнительно выполнено с возможностью итеративно выполнять внешнюю калибровку лидарной системы 230 в ходе работы транспортного средства 220.
[207] Модификации и улучшения вышеописанных реализаций настоящей технологии могут становиться очевидными для специалистов в данной области техники. Вышеприведенное описание должно быть примерным, а не ограничивающим. В силу этого объем настоящей технологии может быть ограничен исключительно объемом прилагаемой формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБЫ И СИСТЕМЫ ДЛЯ СИНХРОНИЗАЦИИ ДАТЧИКОВ БЕСПИЛОТНЫХ ТРАНСПОРТНЫХ СРЕДСТВ (SDV) ОНЛАЙН | 2019 |
|
RU2789923C2 |
| СПОСОБ И ПРОЦЕССОР ДЛЯ УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ В ПОЛОСЕ ДВИЖЕНИЯ АВТОНОМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2019 |
|
RU2745804C1 |
| СПОСОБЫ И СИСТЕМЫ ДЛЯ ОБРАБОТКИ ДАННЫХ ЛИДАРНЫХ ДАТЧИКОВ | 2020 |
|
RU2775822C1 |
| СПОСОБЫ И СИСТЕМЫ ДЛЯ ОБРАБОТКИ ДАННЫХ ЛИДАРНЫХ ДАТЧИКОВ | 2020 |
|
RU2764708C1 |
| СПОСОБЫ И СИСТЕМЫ ДЛЯ АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЯ ПРИСУТСТВИЯ ОБЪЕКТОВ | 2019 |
|
RU2769921C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ПРЕДСКАЗАНИЯ БУДУЩЕГО СОБЫТИЯ В БЕСПИЛОТНОМ АВТОМОБИЛЕ (SDC) | 2019 |
|
RU2757038C2 |
| СПОСОБЫ И СИСТЕМЫ ОБНАРУЖЕНИЯ С ПОМОЩЬЮ ЛИДАРА (LiDAR) С ВОЛОКОННО-ОПТИЧЕСКОЙ МАТРИЦЕЙ | 2019 |
|
RU2762744C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ КАЛИБРОВКИ НЕСКОЛЬКИХ ЛИДАРНЫХ ДАТЧИКОВ | 2019 |
|
RU2767949C2 |
| Способы и системы обнаружения на основе лидара (LiDAR) с FBG-фильтром | 2019 |
|
RU2790129C2 |
| СПОСОБЫ И СИСТЕМЫ ДЛЯ ОПРЕДЕЛЕНИЯ КОМПЬЮТЕРОМ НАЛИЧИЯ ДИНАМИЧЕСКИХ ОБЪЕКТОВ | 2019 |
|
RU2767955C1 |


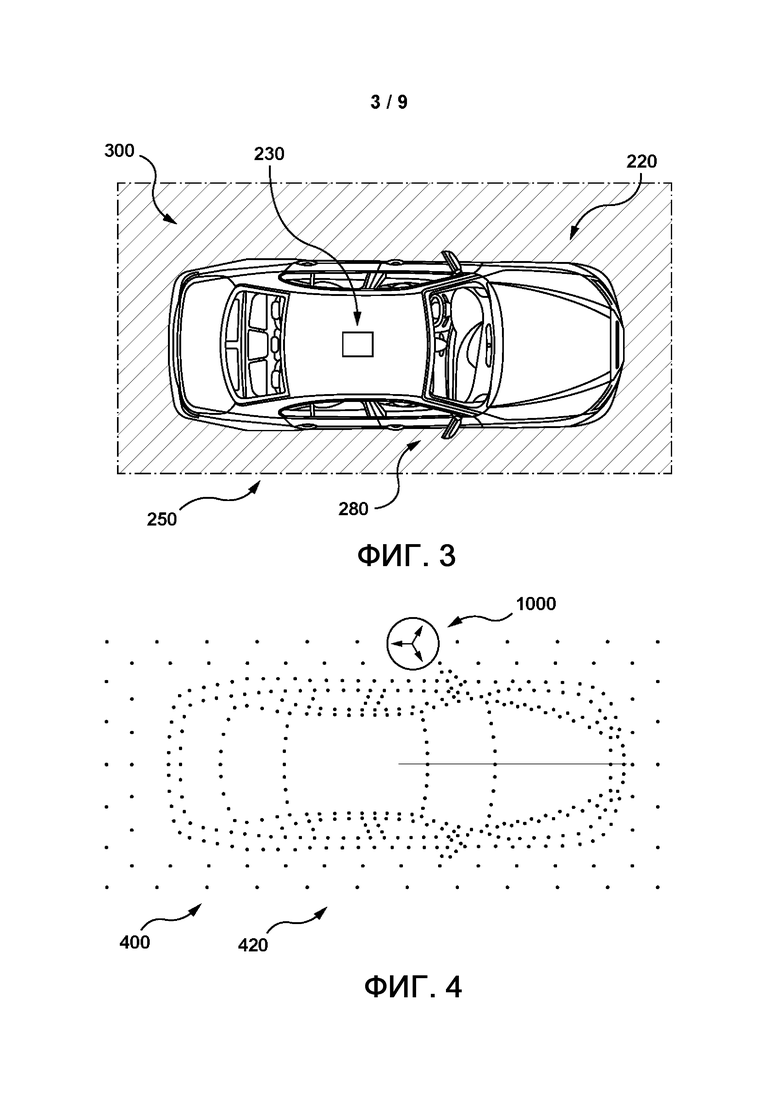

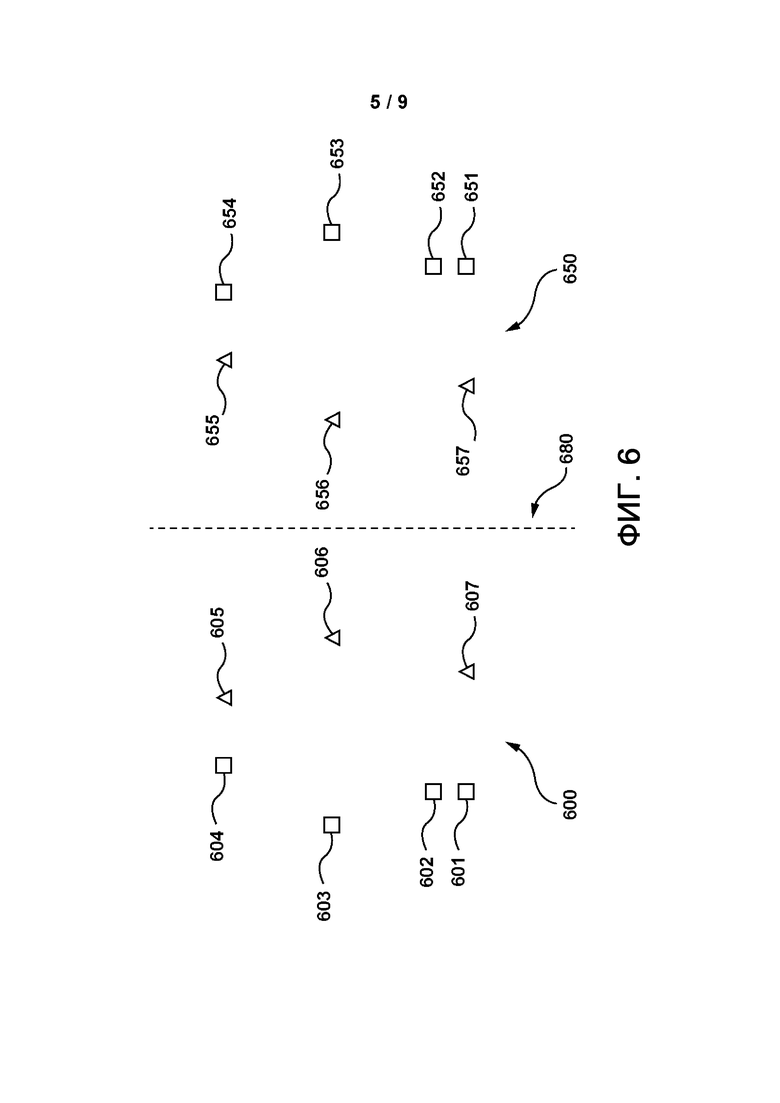




Настоящая технология относится к способам и электронным устройствам для управления транспортным средством, а более конкретно к способам и электронным устройствам для калибровки лидарной системы. Раскрываются способы и устройства для определения оси симметрии беспилотного транспортного средства (SDV) и для калибровки лидарной (LIDAR) системы оптического обнаружения и дальнометрии. Одна из осей системы координат лидарной системы проходит вдоль направления нормали к поверхности земли. Способ включает в себя получение поднабора обнаруженных точек в системе координат; формирование поднабора зеркальных точек на основе поднабора обнаруженных точек; проецирование поднабора зеркальных точек на поднабор обнаруженных точек таким образом, чтобы задавать пары перекрывающихся точек данных; использование расположенных симметрично напротив обнаруженных точек для определения оси симметрии SDV в системе координат лидарной системы и калибровку лидарной системы с использованием углового смещения между осью симметрии SDV и другой из осей системы координат лидарной системы. Технический результат - повышение точности калибровки лидарной системы. 3 н. и 42 з.п. ф-лы, 10 ил.
1. Способ калибровки лидарной (LIDAR) системы оптического обнаружения и дальнометрии, установленной на беспилотном транспортном средстве (SDV), которое располагается на поверхности земли, причем лидарная система имеет систему координат, причем система координат имеет оси, причем одна из осей проходит вдоль направления нормали к поверхности земли, причем способ осуществляют посредством компьютерного аппаратного средства, связанного с SDV, при этом способ содержит этапы, на которых:
получают посредством компьютерного аппаратного средства от лидарной системы поднабор обнаруженных точек данных в системе координат лидарной системы и представляют внешнюю поверхность SDV,
причем поднабор обнаруженных точек данных представляет собой поднабор множества обнаруженных точек данных лидарной системы;
формируют посредством компьютерного аппаратного средства поднабор точек данных зеркального изображения на основе поднабора обнаруженных точек данных,
причем поднабор точек данных зеркального изображения представляет зеркальное изображение внешней поверхности SDV;
проецируют посредством компьютерного аппаратного средства поднабор точек данных зеркального изображения на поднабор обнаруженных точек данных таким образом, чтобы задавать пары перекрывающихся точек данных,
причем каждая данная пара перекрывающихся точек данных включает в себя:
(i) первую точку данных из поднабора обнаруженных точек данных и (ii) вторую точку данных из поднабора точек данных зеркального изображения,
таким образом, что вторая точка данных представляет собой зеркальное изображение третьей точки данных в поднаборе обнаруженных точек данных, которая располагается симметрично напротив первой точки данных;
используют посредством компьютерного аппаратного средства (i) по меньшей мере две первые точки данных и (ii) по меньшей мере две соответствующие третьи точки данных, которые располагаются симметрично напротив по меньшей мере двух первых точек данных, для определения оси симметрии SDV в системе координат лидарной системы; и
калибруют посредством компьютерного аппаратного средства лидарную систему с использованием углового смещения между осью симметрии SDV и другой из осей системы координат лидарной системы.
2. Способ по п. 1, при этом способ дополнительно содержит до получения поднабора обнаруженных точек данных этап, на котором:
получают множество обнаруженных точек данных от лидарной системы.
3. Способ по п. 2, при этом способ дополнительно содержит этап, на котором:
фильтруют посредством компьютерного аппаратного средства множество обнаруженных точек данных для определения поднабора обнаруженных точек данных.
4. Способ по п. 3, в котором фильтрация множества обнаруженных точек данных содержит этап, на котором:
применяют посредством компьютерного аппаратного средства правило аппроксимации ко множеству обнаруженных точек данных, обнаруженных посредством лидарной системы.
5. Способ по п. 4, в котором правило аппроксимации содержит:
индикацию пороговой дистанции, которая, как считается, включает в себя обнаруженный поднабор точек данных.
6. Способ по п. 1, при этом способ дополнительно содержит, до получения множества обнаруженных точек данных, этап, на котором:
обеспечивают посредством компьютерного аппаратного средства индикацию к увеличению внешней поверхности SDV.
7. Способ по п. 6, в котором обеспечение индикации к увеличению внешней поверхности содержит этап, на котором:
обеспечивают посредством компьютерного аппаратного средства индикацию к полному открытию расположенных напротив дверей SDV.
8. Способ по п. 6, в котором обеспечение индикации к увеличению внешней поверхности дополнительно содержит этап, на котором:
обеспечивают посредством компьютерного аппаратного средства индикацию к полному открытию багажника SDV.
9. Способ по п. 1, в котором проецирование посредством компьютерного аппаратного средства поднабора точек данных зеркального изображения на поднабор обнаруженных точек данных содержит этап, на котором:
итеративно минимизируют посредством компьютерного аппаратного средства дистанцию между поднабором точек данных зеркального изображения и поднабором обнаруженных точек данных.
10. Способ по п. 9, в котором итеративная минимизация дистанции содержит этап, на котором определяют правило преобразования между поднабором точек данных зеркального изображения и поднабором обнаруженных точек данных таким образом, чтобы:
перекрывать данную точку данных зеркального изображения с данной обнаруженной точкой данных,
причем данная точка данных зеркального изображения сформирована на основе данной другой обнаруженной точки, которая располагается симметрично напротив данной обнаруженной точки данных.
11. Способ по п. 10, в котором итеративная минимизация дистанции содержит этап, на котором:
применяют посредством компьютерного аппаратного средства итеративный алгоритм ближайших точек (ICP).
12. Способ по п. 1, в котором (i) по меньшей мере две первые точки данных и (ii) по меньшей мере две соответствующие третьи точки данных содержат, соответственно, две первые точки данных и (ii) две соответствующие третьи точки данных.
13. Способ по п. 1, в котором (i) по меньшей мере две первые точки данных и (ii) по меньшей мере две соответствующие третьи точки данных содержат, соответственно, три первые точки данных и (ii) три соответствующие третьи точки данных.
14. Способ по п. 1, в котором использование (i) по меньшей мере двух первых точек данных и (ii) по меньшей мере двух соответствующих третьих точек данных, которые располагаются симметрично напротив по меньшей мере двух первых точек данных, для определения оси симметрии SDV, содержит этапы, на которых:
выбирают посредством компьютерного аппаратного средства (i) по меньшей мере две первые точки данных и (ii) по меньшей мере две соответствующие третьи точки данных;
для каждой пары (i) из по меньшей мере двух первых точек данных и (ii) по меньшей мере двух соответствующих третьих точек данных определяют, посредством компьютерного аппаратного средства, среднюю точку; и
определяют посредством компьютерного аппаратного средства линию через соответствующие средние точки в качестве оси симметрии SDV.
15. Способ по п. 1, в котором система координат лидарной системы имеет три ортогональных оси.
16. Способ по п. 1, в котором множество обнаруженных точек данных собирают в системе сферических координат и преобразуют в систему координат лидарной системы, имеющей три ортогональных оси.
17. Способ по п. 1, в котором поднабор точек данных зеркального изображения формируют в системе координат лидарной системы.
18. Способ по п. 10, в котором поднабор точек данных зеркального изображения формируют в том же многомерном пространстве, что и поднабор обнаруженных точек данных.
19. Способ по п. 1, при этом способ дополнительно содержит, до калибровки, этапы, на которых:
определяют посредством компьютерного аппаратного средства направление нормали к поверхности земли на основе множества обнаруженных точек данных лидарной системы;
привязывают посредством компьютерного аппаратного средства одну из осей системы координат на основе направления нормали к поверхности земли,
таким образом, что одна из осей проходит в направлении нормали.
20. Способ по п. 1, при этом способ дополнительно содержит этап, на котором:
определяют посредством компьютерного аппаратного средства угловое смещение между осью симметрии SDV и одной из осей системы координат лидарной системы.
21. Способ по п. 20, в котором использование углового смещения содержит этапы, на которых:
определяют, посредством компьютерного аппаратного средства, правило вращательного сдвига на основе углового смещения таким образом, что другая из осей системы координат лидарной системы совпадает с осью симметрии SDV; и
используют посредством компьютерного аппаратного средства правило вращательного сдвига для вращения используемых обнаруженных точек данных лидарной системы,
за счет этого определяя внешне калиброванные используемые обнаруженные точки данных.
22. Способ по п. 1, при этом способ дополнительно содержит этап, на котором итеративно повторяют калибровку лидарной системы в ходе работы SDV.
23. Способ определения оси симметрии беспилотного транспортного средства (SDV), расположенного на поверхности земли и содержащего установленную на нем лидарную (LIDAR) систему оптического обнаружения и дальнометрии, причем лидарная система имеет систему координат, причем система координат имеет оси, причем способ осуществляют посредством компьютерного аппаратного средства, связанного с SDV, при этом способ содержит этапы, на которых:
получают посредством компьютерного аппаратного средства от лидарной системы поднабор обнаруженных точек данных в системе координат лидарной системы и представляют внешнюю поверхность SDV,
причем поднабор обнаруженных точек данных представляет собой поднабор множества обнаруженных точек данных лидарной системы;
формируют посредством компьютерного аппаратного средства поднабор точек данных зеркального изображения на основе поднабора обнаруженных точек данных,
причем поднабор точек данных зеркального изображения представляет зеркальное изображение внешней поверхности SDV;
проецируют посредством компьютерного аппаратного средства поднабор точек данных зеркального изображения на поднабор обнаруженных точек данных таким образом, чтобы задавать пары перекрывающихся точек данных,
причем каждая данная пара перекрывающихся точек данных включает в себя:
(i) первую точку данных из поднабора обнаруженных точек данных и (ii) вторую точку данных из поднабора точек данных зеркального изображения,
таким образом, что вторая точка данных представляет собой зеркальное изображение третьей точки данных в поднаборе обнаруженных точек данных, которая располагается симметрично напротив первой точки данных;
используют посредством компьютерного аппаратного средства (i) по меньшей мере две первые точки данных и (ii) по меньшей мере две соответствующие третьи точки данных, которые располагаются симметрично напротив по меньшей мере двух первых точек данных для определения оси симметрии SDV в системе координат лидарной системы.
24. Компьютерное аппаратное средство для калибровки лидарной (LIDAR) системы оптического обнаружения и дальнометрии, установленной на беспилотном транспортном средстве (SDV), которое располагается на поверхности земли, причем лидарная система имеет систему координат, причем система координат имеет оси, причем одна из осей проходит вдоль направления нормали к поверхности земли, причем компьютерное аппаратное средство выполнено с возможностью:
получать от лидарной системы поднабор обнаруженных точек данных в системе координат лидарной системы и представлять внешнюю поверхность SDV,
причем поднабор обнаруженных точек данных представляет собой поднабор множества обнаруженных точек данных лидарной системы;
формировать поднабор точек данных зеркального изображения на основе поднабора обнаруженных точек данных,
причем поднабор точек данных зеркального изображения представляет зеркальное изображение внешней поверхности SDV;
проецировать поднабор точек данных зеркального изображения на поднабор обнаруженных точек данных таким образом, чтобы задавать пары перекрывающихся точек данных,
причем каждая данная пара перекрывающихся точек данных включает в себя:
(i) первую точку данных из поднабора обнаруженных точек данных и (ii) вторую точку данных из поднабора точек данных зеркального изображения,
таким образом, что вторая точка данных представляет собой зеркальное изображение третьей точки данных в поднаборе обнаруженных точек данных, которая располагается симметрично напротив первой точки данных;
использовать (i) по меньшей мере две первые точки данных и (ii) по меньшей мере две соответствующие третьи точки данных, которые располагаются симметрично напротив по меньшей мере двух первых точек данных для определения оси симметрии SDV в системе координат лидарной системы; и
калибровать лидарную систему с использованием углового смещения между осью симметрии SDV и другой из осей системы координат лидарной системы.
25. Компьютерное аппаратное средство по п. 24, при этом компьютерное аппаратное средство дополнительно выполнено с возможностью до получения поднабора обнаруженных точек данных:
получать множество обнаруженных точек данных от лидарной системы.
26. Компьютерное аппаратное средство по п. 25, при этом компьютерное аппаратное средство дополнительно выполнено с возможностью:
фильтровать множество обнаруженных точек данных для определения поднабора обнаруженных точек данных.
27. Компьютерное аппаратное средство по п. 26, в котором выполнение компьютерного аппаратного средства с возможностью фильтровать множество обнаруженных точек данных содержит выполнение компьютерного аппаратного средства с возможностью:
применять правило аппроксимации ко множеству обнаруженных точек данных, обнаруженных посредством лидарной системы.
28. Компьютерное аппаратное средство по п. 27, в котором правило аппроксимации содержит:
индикацию пороговой дистанции, которая, как считают, включает в себя обнаруженный поднабор точек данных.
29. Компьютерное аппаратное средство по п. 24, при этом компьютерное аппаратное средство дополнительно выполнено с возможностью до получения множества обнаруженных точек данных:
обеспечивать индикацию к увеличению внешней поверхности SDV.
30. Компьютерное аппаратное средство по п. 29, в котором для обеспечения индикации к увеличению внешней поверхности компьютерное аппаратное средство выполнено с возможностью:
обеспечить индикацию к полному открытию расположенных напротив дверей SDV.
31. Компьютерное аппаратное средство по п. 29, в котором для обеспечения индикации к увеличению внешней поверхности компьютерное аппаратное средство выполнено с возможностью:
обеспечить индикацию к полному открытию багажника SDV.
32. Компьютерное аппаратное средство по п. 24, в котором выполнение компьютерного аппаратного средства с возможностью проецировать поднабор точек данных зеркального изображения на поднабор обнаруженных точек данных содержит выполнение компьютерного аппаратного средства с возможностью:
итеративно минимизировать дистанцию между поднабором точек данных зеркального изображения и поднабором обнаруженных точек данных.
33. Компьютерное аппаратное средство по п. 32, в котором для итеративной минимизации дистанции компьютерное аппаратное средство выполнено с возможностью определять правило преобразования между поднабором точек данных зеркального изображения и поднабором обнаруженных точек данных таким образом, чтобы:
перекрывать данную точку данных зеркального изображения с данной обнаруженной точкой данных,
причем данная точка данных зеркального изображения сформирована на основе данной другой обнаруженной точки, которая располагается симметрично напротив данной обнаруженной точки данных.
34. Компьютерное аппаратное средство по п. 33, в котором для итеративной минимизации дистанции компьютерное аппаратное средство выполнено с возможностью:
применять итеративный алгоритм ближайших точек (ICP).
35. Компьютерное аппаратное средство по п. 24, в котором (i) по меньшей мере две первые точки данных и (ii) по меньшей мере две соответствующие третьи точки данных содержат, соответственно, две первые точки данных и (ii) две соответствующие третьи точки данных.
36. Компьютерное аппаратное средство по п. 24, в котором (i) по меньшей мере две первые точки данных и (ii) по меньшей мере две соответствующие третьи точки данных содержат, соответственно, три первые точки данных и (ii) три соответствующие третьи точки данных.
37. Компьютерное аппаратное средство по п. 24, в котором использование (i) по меньшей мере двух первых точек данных и (ii) по меньшей мере двух соответствующих третьих точек данных, которые располагаются симметрично напротив по меньшей мере двух первых точек данных, для определения оси симметрии SDV содержит выполнение компьютерного аппаратного средства с возможностью:
выбирать (i) по меньшей мере две первые точки данных и (ii) по меньшей мере две соответствующие третьи точки данных;
для каждой пары (i) из по меньшей мере двух первых точек данных и (ii) по меньшей мере двух соответствующих третьих точек данных определять среднюю точку; и
определять линию через соответствующие средние точки в качестве оси симметрии SDV.
38. Компьютерное аппаратное средство по п. 24, в котором система координат лидарной системы имеет три ортогональных оси.
39. Компьютерное аппаратное средство по п. 24, в котором множество обнаруженных точек данных собирается в системе сферических координат и преобразуется в систему координат лидарной системы, имеющей три ортогональных оси.
40. Компьютерное аппаратное средство по п. 24, в котором поднабор точек данных зеркального изображения формируется в системе координат лидарной системы.
41. Компьютерное аппаратное средство по п. 33, в котором поднабор точек данных зеркального изображения формируется в том же многомерном пространстве, что и поднабор обнаруженных точек данных.
42. Компьютерное аппаратное средство по п. 24, при этом компьютерное аппаратное средство дополнительно выполнено с возможностью, до калибровки:
определять направление нормали к поверхности земли на основе множества обнаруженных точек данных лидарной системы;
привязывать одну из осей системы координат на основе направления нормали к поверхности земли,
таким образом, что одна из осей проходит в направлении нормали.
43. Компьютерное аппаратное средство по п. 24, при этом компьютерное аппаратное средство дополнительно выполнено с возможностью:
определять угловое смещение между осью симметрии SDV и одной из осей системы координат лидарной системы.
44. Компьютерное аппаратное средство по п. 43, в котором использование углового смещения содержит выполнение компьютерного аппаратного средства с возможностью:
определять правило вращательного сдвига на основе углового смещения таким образом, что другая из осей системы координат лидарной системы совпадает с осью симметрии SDV; и
использовать правило вращательного сдвига для вращения используемых обнаруженных точек данных лидарной системы,
за счет этого определяя внешне калиброванные используемые обнаруженные точки данных.
45. Компьютерное аппаратное средство по п. 24, при этом компьютерное аппаратное средство дополнительно выполнено с возможностью итеративно калибровать лидарную систему в ходе работы SDV.
| US 20170285649 A1, 05.10.2017 | |||
| WO 2019073526 A1, 18.04.2019 | |||
| US 20170129391 A1, 11.05.2017 | |||
| US 20180210451 A1, 26.07.2018 | |||
| US 20180259958 A1, 13.09.2018 | |||
| US 20080243390 A1, 02.10.2008 | |||
| WO 2017013749 A1, 26.01.2017 | |||
| US 20160272199 A1, 22.09.2016. |

