ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящая технология относится к системам и способам обнаружения и определения дальности с помощью света (LiDAR) для обнаружения объектов в области, представляющей интерес.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
[0002] В предшествующем уровне техники были предложены и реализованы различные навигационные системы, основанные на компьютере. Эти системы варьируются от более базовых решений, основанных на локализации с помощью карты решениях - т.е. на использовании компьютерной системы для поддержки водителя при навигации по маршруту от начального пункта до пункта назначения; до более сложных решений, таких как системы вождения с компьютерной поддержкой и/или без вмешательства водителя.
[0003] Некоторые из этих систем реализованы как то, что является общеизвестным как системы “круиз-контроля”. В этих системах компьютерная система на борту транспортного средства поддерживает установленную пользователем скорость транспортного средства. Некоторые из систем круиз-контроля реализуют систему “интеллектуального управления дистанцией”, причем пользователь может установить дистанцию до потенциально находящегося впереди автомобиля (например, выбрать значение, выраженное в числе транспортных средств), и компьютерная система регулирует скорость транспортного средства, основываясь, по меньшей мере частично, на транспортном средстве, приближающемся к потенциально находящемуся впереди транспортному средству в пределах предварительно заданной дистанции. Некоторые из систем круиз-контроля дополнительно оснащены системой контроля столкновений, такие системы после обнаружения транспортного средства (или иного препятствия) впереди движущегося транспортного средства замедляют или останавливают данное транспортное средство.
[0004] Некоторые из более продвинутых систем обеспечивают полностью автономное вождение транспортного средства без прямого управления от оператора (т.е. водителя). Эти автономно управляемые транспортные средства включают в себя системы, которые могут побуждать транспортное средство ускоряться, тормозить, останавливаться, менять полосу и самостоятельно парковаться.
[0005] Одной из основных технических проблем в реализации вышеописанных систем является способность обнаруживать объекты, расположенные поблизости от транспортного средства. В одном примере, системам может требоваться способность обнаруживать транспортное средство впереди данного транспортного средства (данного транспортного средства, имеющего данную систему на борту), причем транспортное средство впереди может вызывать риск/опасность для данного транспортного средства и может требовать от системы предпринимать корректирующие меры, будь то торможение или иное изменение скорости, остановка или смена полосы.
[0006] Обнаружение объектов с помощью лидара в общем содержит передачу пучков света в направлении области, представляющей интерес, и обнаружение отраженных световых пучков, таких как отраженные от объектов в области, представляющей интерес, чтобы генерировать представление области, представляющей интерес, включая любые объекты. Лазеры, излучающие импульсы света в пределах узкой длины волны, часто используются в качестве источников света. Положение и дистанция объекта могут вычисляться с использованием вычислений времени пролета излученного и обнаруженного пучка света. Путем вычисления таких положений как “точек данных”, может быть сгенерировано цифровое многомерное представление окружения.
[0007] Одним из факторов, оказывающих влияние на качество генерируемого представления окружения и объектов в нем, является способность обнаруживать максимально возможное количество отраженных пучков света. Однако обнаружение внешнего света из окружения, а также отраженных пучков света от объекта, может ограничить разрешение обнаружения объекта или маскировать обнаружение объекта. Другим фактором, влияющим на качество генерируемого представления окружения и обнаружение объектов в нем, является способность сканировать максимально широкую область, представляющую интерес.
[0008] При разработке усовершенствованных лидарных систем, в основном принимаются во внимание минимизация затрат и максимизация надежности и долговечности продукта. Например, увеличение количества лазеров или увеличение сканируемой зоны путем вращения компонентов или деталей компонентов часто является неприемлемым по соображениям надежности, связанным с износом, приводящим к преждевременному отказу системы, и увеличивает затраты.
КРАТКОЕ ОПИСАНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0009] Поэтому, существует потребность в системах и способах, которые избегают, сокращают или преодолевают ограничения предшествующего уровня техники.
[00010] Разработчики заметили, что качество обнаружения объектов и/или представления объектов в области, представляющей интерес, связано с величиной оптического шума, обнаруживаемого системой при обнаружении отраженного света от объектов. Оптический шум может включать в себя внешний свет от солнца, передних фар, фонарных столбов и тому подобного, который может маскировать отраженный свет от объектов. Повышение чувствительности обнаружения света не является решением, потому что это также увеличивает обнаруженный шумовой сигнал. Разработчики создали решение, которое учитывает по меньшей мере некоторые из этих факторов.
[00011] Вкратце, аспекты настоящей технологии относятся к системам и способам для обнаружения объектов в области, представляющей интерес (ROI), содержащим основанную на длине волны фильтрацию света из области, представляющей интерес, чтобы отделить свет, имеющий длины волн, относящиеся к отраженному свету от объектов, от света, имеющего длины волн, относящиеся к шуму. В некоторых вариантах осуществления отфильтрованный свет может затем детектироваться широкополосными детекторами, что ослабляет потребность в специфических для длины волны детекторах, которые могут увеличить стоимость лидарной системы.
[00012] В соответствии с первым широком аспектом настоящей технологии обеспечена лидарная система для обнаружения объектов в области, представляющей интерес, причем система содержит: источник излучения для излучения выходного пучка на предварительно заданной длине волны в направлении области, представляющей интерес; систему обнаружения для обнаружения входного пучка из области, представляющей интерес, причем система обнаружения включает в себя: оптическое волокно на обратном маршруте, выполненное с возможностью захвата входного пучка, причем входной пучок содержит полезную часть, имеющую длину волны, соответствующую предварительно заданной длине волны выходного пучка, и шумовую часть, имеющую длины волн за пределами предварительно заданной длины волны, оптическое волокно на обратном маршруте включает в себя: волоконную брэгговскую решетку (FBG) для фильтрации входного пучка, чтобы отделить полезную часть входного пучка от шумовой части; и детектор для приема полезной части входного пучка. В некоторых вариантах осуществления детектор представляет собой одиночный широкополосный детектор.
[00013] В некоторых вариантах осуществления FBG-фильтр выполнен с возможностью передачи полезной части входного пучка на одиночный широкополосный детектор вдоль оптического канала оптического волокна на обратном маршруте.
[00014] В некоторых других вариантах осуществления FBG-фильтр выполнен с возможностью отражения полезной части входного пучка на одиночный широкополосный детектор.
[00015] В некоторых вариантах осуществления маршрут передачи выходного пучка к области, представляющей интерес, включает в себя подучасток, который представляет собой тот же путь, что и обратный маршрут из области, представляющей интерес, в направлении одиночного широкополосного детектора.
[00016] Маршрут передачи может содержать оптическое волокно передачи, подучасток маршрута передачи, который представляет собой тот же путь, что и обратный маршрут, содержит часть оптического волокна передачи, которое избирательно соединено с возможностью связи с оптическим волокном на обратном маршруте. В некоторых вариантах осуществления лидарная система дополнительно содержит оптический циркулятор для избирательной передачи входного пучка из области, представляющей интерес, в оптическое волокно на обратном маршруте. Оптическое волокно передачи и оптическое волокно на обратном маршруте могут содержать, каждое, сердцевину и оболочечную структуру.
[00017] Подучасток маршрута передачи, который представляет собой тот же путь, что и обратный маршрут, может содержать волокно с двойной оболочкой, причем волокно с двойной оболочкой имеет первую часть для передачи выходного пучка и вторую часть для передачи входного пучка. Лидарная система может дополнительно содержать оптический циркулятор для избирательной передачи входного пучка из области, представляющей интерес, в оптическое волокно на обратном маршруте.
[00018] В некоторых других вариантах осуществления маршрут передачи выходного пучка к области, представляющей интерес, включает в себя подучасток, который представляет собой другой путь, иной, чем обратный маршрут из области, представляющей интерес, в направлении одиночного широкополосного детектора. Подучасток маршрута передачи, который представляет собой другой путь, иной, чем обратный маршрут, может содержать отдельные оптические волокна, первое оптическое волокно для передачи выходного пучка и второе оптическое волокно для передачи входного пучка. В некоторых вариантах осуществления второе оптическое волокно представляет собой оптическое волокно на обратном маршруте.
[00019] В некоторых вариантах осуществления оптическое волокно на обратном маршруте содержит матрицу оптических волокон, каждое оптическое волокно имеет приемный конец, приемные концы оптических волокон выполнены в двумерной матрице; и приемную линзу для фокусировки данного входного пучка на данный приемный конец данного оптического волокна на обратном маршруте волоконно-оптической матрицы.
[00020] В некоторых вариантах осуществления лидарная система дополнительно содержит микроэлектромеханический (MEM) компонент для приема выходного пучка на отражающей поверхности MEM компонента и для отражения выходного пучка в направлении области, представляющей интерес, MEM компонент выполнен с возможностью осцилляции относительно первой оси осцилляции с первой амплитудой осцилляции для расширения выходного пучка на вертикальный интервал вдоль вертикальной оси в области, представляющей интерес.
[00021] В некоторых вариантах осуществления предварительно заданная длина волны выходного пучка равна около 1550 нм.
[00022] В другом аспекте обеспечен способ на основе лидара для обнаружения объектов в области, представляющей интерес, способ реализуют процессором, соединенным с возможностью связи с лидарной системой, причем способ содержит: побуждение источника излучения излучать выходной пучок в направлении области, представляющей интерес; захват входного пучка в оптическом волокне на обратном маршруте системы обнаружения лидарной системы, причем входной пучок содержит полезную часть, имеющую длину волны, соответствующую предварительно заданной длине волны выходного пучка оптического волокна на обратном маршруте, и шумовую часть, имеющую длины волн за пределами предварительно заданной длины волны, отделение полезной части входного пучка от шумовой части; и обнаружение полезной части входного пучка детектором, причем детектор содержит одиночный широкополосный детектор.
[00023] В определенных вариантах осуществления отделение полезной части входного пучка от шумовой части входного пучка содержит отражение полезной части входного пучка на детектор и передачу шумовой части по оптическому маршруту оптического волокна на обратном маршруте.
[00024] В определенных вариантах осуществления отделение полезной части входного пучка от шумовой части входного пучка содержит передачу полезной части входного пучка по оптическому маршруту оптического волокна на обратном маршруте и отражение шумовой части.
[00025] При помощи определенных вариантов осуществления настоящей технологии обнаружение объектов в ROI может быть улучшено. В определенных вариантах осуществления преимущества настоящей технологии включают в себя увеличение производительности системы без негативного влияния на стоимость и сложность системы.
[00026] Сокращение или удаление шумового ракурса входного пучка может обеспечить возможность повышенной чувствительности обнаружения объектов в области, представляющей интерес. Более того, посредством использования компонентов фильтра, таких как FBG в оптическом волокне на обратном маршруте, можно минимизировать количество подвижных деталей в системе. Это может, в свою очередь, выливаться в экономию затрат и повышенный срок службы лидарной системы. Комбинация сокращения или удаления шумового ракурса входного пучка вместе с широкополосным детектором в определенных вариантах осуществления, в противоположность детекторам, которые обнаруживают узкую полосу длины волны, экономически эффективна без снижения качества обнаружения.
[00027] В контексте настоящего описания “источник излучения” в широком смысле относится к любому устройству, выполненному с возможностью испускания излучения, такого как сигнал излучения в форме пучка. Источник излучения включает в себя, но без ограничения, источник света, выполненный с возможностью излучения пучков света. Источник света может представлять собой лазер, такой как твердотельный лазер, лазерный диод, лазер высокой мощности или альтернативный источник света, такой как источник света на основе светоизлучающего диода (LED). Некоторыми (неограничивающими) примерами источника света являются лазерный диод Фабри-Перо, лазер на квантовой яме, лазер с распределенным брэгговским отражателем (DBR), лазер с распределенной обратной связью (DFB), волоконный лазер или лазер поверхностного излучения с вертикальным резонатором (VCSEL). К тому же источник света может излучать пучки света в разных форматах, таких как световые импульсы, непрерывная волна (CW), квази-CW и так далее. В некоторых неограничивающих примерах источник света может включать в себя лазерный диод, выполненный с возможностью излучения света на длине волны между около 650 нм и 1150 нм. Альтернативно источник света может включать в себя лазерный диод, выполненный с возможностью излучения пучков света на длине волны между около 800 нм и около 1000 нм, между около 850 нм и около 950 нм, между около 1300 нм и около 1600 нм или в любом другом подходящем диапазоне. Если не указано иное, термин "около" в отношении числового значения определяется как отклонение до 10% относительно установленного значения.
[00028] В контексте настоящего описания “выходной пучок” может также упоминаться как пучок излучения, такой как пучок света, который генерируется источником излучения и направляется от места излучения в направлении области, представляющей интерес. Выходной пучок может иметь один или более параметров, таких как: длительность пучка, угловая дисперсия пучка, длина волны, мгновенная мощность, плотность фотонов на разных расстояниях от источника света, средняя мощность, интенсивность мощности пучка, ширина пучка, частота повторений пучка, последовательность пучков, скважность импульсов, длина волны или фаза и т.д. Выходной пучок может быть не поляризован или может быть случайно поляризован, может не иметь конкретной или фиксированной поляризации (например, поляризация может меняться во времени) или может иметь конкретную поляризацию (например, линейную поляризацию, эллиптическую поляризацию или круговую поляризацию).
[00029] В контексте настоящего описания “входной пучок” может также упоминаться как пучок излучения, такой как пучок света, отраженный от одного или более объектов в ROI. Под отраженным понимается, что по меньшей мере часть выходного пучка, падающего на один или более объектов в ROI, отражается от одного или более объектов. Выходной пучок может иметь один или более параметров, таких как: время пролета (т.е., время от излучения до обнаружения), мгновенная мощность (например, сигнатура мощности), средняя мощность по всему обратному импульсу и распределение фотонов/сигнал по периоду обратного импульса и т.д.
[00030] В контексте настоящего описания “область, представляющая интерес” может в широком смысле включать в себя часть наблюдаемой окружающей среды лидарной системы, в которой могут обнаруживаться один или более объектов. Отметим, что область лидарной системы, представляющая интерес, может испытывать влияние различных условий, таких как, но без ограничения: ориентация лидарной системы (например, направление оптической оси лидарной системы); положение лидарной системы относительно окружающей среды (например, расстояние над землей и смежная топография и препятствия); рабочие параметры лидарной системы (например, мощность излучения, вычислительные настройки, определенные рабочие углы) и т.д. ROI лидарной системы может определяться, например, плоским углом или пространственным углом. В одном примере ROI может также определяться в определенном диапазоне (например, до 200 м или тому подобное).
[00031] В контексте настоящего описания "сервер" представляет собой компьютерную программу, которая работает на подходящих аппаратных средствах и способна принимать запросы (например, от электронных устройств) по сети и выполнять эти запросы или вызывать выполнение этих запросов. Аппаратные средства могут быть реализованы как один физический компьютер или одна физическая компьютерная система, но ничто из этого не является обязательным требованием для настоящей технологии. В настоящем контексте использование выражения "сервер" не должно означать, что каждая задача (например, принятые инструкции или запросы) или любая конкретная задача будет принята, выполнена или побуждаться к выполнению одним и тем же сервером (т.е. одним и тем же программным обеспечением и/или аппаратными средствами); оно должно означать, что любое количество элементов программного обеспечения или аппаратных устройств может быть вовлечено в прием/отправку, выполнение или побуждение выполнения любой задачи или запроса или следствий любой задачи или запроса; и все из этого программного обеспечения и аппаратных средств могут представлять собой один сервер или множество серверов, оба из которых включены в выражение "по меньшей мере один сервер".
[00032] В контексте настоящего описания "электронное устройство" представляет собой любые компьютерные аппаратные средства, которые способны выполнять программное обеспечение, подходящее для релевантной рассматриваемой задачи. В контексте настоящего описания термин "электронное устройство" подразумевает, что устройство может функционировать как сервер для других электронных устройств и клиентских устройств, однако это не является обязательным требованием для настоящей технологии. Таким образом, некоторые (неограничивающие) примеры электронных устройств включают в себя персональные компьютеры (настольные компьютеры, ноутбуки, нетбуки и т.д.), смартфоны и планшеты, а также сетевое оборудование, такое как маршрутизаторы, переключатели и шлюзы. Следует понимать, что в настоящем контексте тот факт, что устройство функционирует как электронное устройство, не означает, что оно не может функционировать как сервер для других электронных устройств.
[00033] В контексте настоящего описания выражение "информация" включает в себя информацию любого характера или вида, которая может храниться в базе данных. Таким образом, информация включает в себя, но без ограничения, визуальные произведения (например, карты), аудиовизуальные произведения (например, изображения, фильмы, звуковые записи, презентации и т.д.), данные (например, данные местоположения, данные погоды, данные трафика, числовые данные и т.д.), текст (например, мнения, комментарии, вопросы, сообщения и т.д.), документы, электронные таблицы и т.д.
[00034] В контексте настоящего описания "база данных" представляет собой любую структурированную совокупность данных, независимо от ее конкретной структуры, программного обеспечения управления базой данных или компьютерных аппаратных средств, на которых данные хранятся, реализуются или иным образом предоставляются для использования. База данных может находиться на тех же самых аппаратных средствах, что и процесс, который хранит или использует информацию, сохраненную в базе данных, или она может находиться на отдельных аппаратных средствах, таких как выделенный сервер или множество серверов.
[00035] В контексте настоящего описания слова "первый", "второй", "третий" и т.д. были использованы как прилагательные только в целях обеспечения возможности различения между существительными, которые они модифицируют, друг от друга, а не в целях описания какого-либо конкретного отношения между этими существительными. Дополнительно, как обсуждается здесь в других контекстах, ссылка на "первый" элемент и "второй" элемент не препятствует тому, что два элемента представляют собой тот же самый действительный реальный элемент.
[00036] Реализации настоящей технологии имеют, каждая, по меньшей мере одну из вышеупомянутых целей и/или аспектов, но не обязательно имеет все из них. Следует понимать, что некоторые аспекты настоящей технологии, которые явились результатом попытки достичь вышеупомянутой цели, могут не удовлетворять этой цели и/или могут удовлетворять другим целями, не изложенным конкретно здесь.
[00037] Дополнительные и/или альтернативные признаки, аспекты и преимущества реализаций настоящей технологии станут очевидны из нижеследующего описания, сопровождающих чертежей и прилагаемой формулы изобретения.
Краткое описание чертежей
[00038] Эти и другие признаки, аспекты и преимущества настоящей технологии будут более понятны, принимая во внимание следующее описание, прилагаемую формулу изобретения и сопровождающие чертежи, где:
[00039] Фиг. 1 изображает схематичную диаграмму примерной компьютерной системы для реализации определенных вариантов осуществления систем и/или способов настоящей технологии.
[00040] Фиг. 2 изображает сетевую компьютерную среду, подходящую для использования с некоторыми реализациями настоящей технологии.
[00041] Фиг. 3 изображает схематичную диаграмму примерной лидарной системы для реализации определенных вариантов осуществления систем и/или способов настоящей технологии;
[00042] Фиг. 4 изображает реализацию лидарной системы согласно фиг. 3 в соответствии с определенными вариантами осуществления настоящей технологии;
[00043] Фиг. 5 представляет собой схематичную иллюстрацию распределения длин волн входного пучка, в соответствии с определенными вариантами осуществления настоящей технологии;
[00044] Фиг. 6 представляет собой схематичную иллюстрацию распределения длин волн отраженной части входного пучка, в соответствии с определенными вариантами осуществления настоящей технологии;
[00045] Фиг. 7 представляет собой схематичную иллюстрацию распределения длин волн переданной части входного пучка, в соответствии с определенными вариантами осуществления настоящей технологии;
[00046] Фиг. 8 изображает альтернативную реализацию лидарной системы согласно фиг. 3, в соответствии с определенными вариантами осуществления настоящей технологии;
[00047] Фиг. 9 изображает схематичное представление лидарной системы согласно фиг. 4, реализованной в соответствии с конкретным неограничивающим вариантом осуществления настоящей технологии;
[00048] Фиг. 10 изображает профиль поперечного сечения оптического волокна лидарной системы согласно фиг. 9;
[00049] Фиг. 11 изображает схематичное представление лидарной системы согласно фиг. 4, реализованной в соответствии с альтернативным неограничивающим вариантом осуществления настоящей технологии;
[00050] Фиг. 12 изображает профиль поперечного сечения оптического волокна лидарной системы согласно фиг. 11;
[00051] Фиг. 13 изображает схематичное представление лидарной системы согласно фиг. 4, реализованной в соответствии с дополнительным альтернативным неограничивающим вариантом осуществления настоящей технологии;
[00052] Фиг. 14 изображает профиль поперечного сечения оптического волокна и оптического волокна на обратном маршруте лидарной системы согласно фиг. 13;
[00053] Фиг. 15 изображает схематичное представление лидарной системы согласно фиг. 4, реализованной в соответствии с другим дополнительным альтернативным неограничивающим вариантом осуществления настоящей технологии;
[00054] Фиг. 16 изображает профиль поперечного сечения оптического волокна и оптических волокон на обратном маршруте лидарной системы согласно фиг. 15 в соответствии с определенными вариантами осуществления настоящей технологии;
[00055] Фиг. 17 изображает профиль поперечного сечения оптического волокна и оптических волокон на обратном маршруте лидарной системы согласно фиг. 15 в соответствии с определенными вариантами осуществления настоящей технологии;
[00056] Фиг. 18 изображает схематичную иллюстрацию системы детектора лидарной системы согласно фиг. 4, реализованной в соответствии с определенными неограничивающими вариантами осуществления настоящей технологии; и
[00057] Фиг. 19 иллюстрирует блок-схему последовательности операций способа для обнаружения объектов в области, представляющей интерес, в соответствии с различными неограничивающими вариантами осуществления настоящей технологии.
Подробное описание
[00058] Примеры и условный язык, как изложено здесь, принципиально предназначены для того, чтобы помогать читателю в понимании принципов настоящей технологии и не ограничивать ее объем такими конкретно изложенными примерами и условиями. Понятно, что специалисты в данной области техники смогут создать различные компоновки, которые, хотя не описаны или не показаны здесь явно, тем не менее воплощают принципы настоящей технологии и включены в ее сущность и объем.
[00059] Более того, в качестве помощи в понимании, следующее описание может описывать относительно упрощенные реализации настоящей технологии. Как будет понятно специалистам в данной области техники, различные реализации настоящей технологии могут быть более сложными.
[00060] В некоторых случаях могут также быть изложены полезные примеры модификаций настоящей технологии. Это делается только в качестве помощи в понимании, но, вновь, не для определения объема или установления границ настоящей технологии. Эти модификации не являются исчерпывающим списком, и специалист в данной области техники сможет создать другие модификации, тем не менее остающиеся в пределах объема настоящей технологии. Дополнительно, если примеры модификаций не были изложены, это не должно интерпретироваться так, что модификации невозможны и/или что описанное представляет собой единственный способ реализации этого элемента настоящей технологии.
[00061] Более того, все положения в настоящем документе, излагающие принципы, аспекты и реализации технологии, а также их конкретные примеры должны включать в себя как структурные, так и функциональные их эквиваленты, независимо от того, известны ли они в настоящем или будут разработаны в будущем. Таким образом, например, специалистам в данной области техники будет понятно, что любые блок-схемы здесь представляют концептуальные представления иллюстративных схем, воплощающих принципы настоящей технологии. Аналогично, будет понятно, что любые блок-схемы последовательностей операций, блок-схемы процесса, диаграммы переходов состояний, псевдокод и тому подобное представляют различные процессы, которые могут, по существу, быть представлены в считываемых компьютером носителях и поэтому исполняться компьютером или процессором, независимо от того, показан ли такой компьютер или процессор явно или нет.
[00062] Функции различных элементов, показанных на чертежах, включая любой функциональный блок, обозначенный как "процессор", могут обеспечиваться через использование выделенных аппаратных средств, а также аппаратных средств, способных исполнять программное обеспечение в ассоциации с подходящим программным обеспечением. При обеспечении процессором, функции могут обеспечиваться одним выделенным процессором, одним совместно используемым процессором или множеством отдельных процессоров, некоторые из которых могут использоваться совместно. Более того, явное использование термина "процессор" или "контроллер" не должно пониматься как ссылающееся исключительно на аппаратные средства, способные исполнять программное обеспечение, и может в неявном виде включать в себя, без ограничения, аппаратные средства цифрового сигнального процессора (DSP), сетевой процессор, специализированную интегральную схему (ASIC), программируемую вентильную матрицу (FPGA), постоянную память (ROM) для хранения программного обеспечения, память с произвольным доступа (RAM) и энергонезависимое хранилище. Другие аппаратные средства, обычные и/или персонализированные, могут также быть включены.
[00063] Модули программного обеспечения или просто модули, которые подразумеваются представляющими собой программное обеспечение, могут быть представлены здесь как любая комбинация элементов блок-схемы последовательности операций или других элементов, указывающих выполнение этапов процесса, и/или текстовое описание. Такие модули могут исполняться аппаратными средствами, которые показаны в явном или в неявном виде.
[00064] С этими введенными фундаментальными положениями, теперь рассмотрим некоторые неограничивающие примеры, чтобы проиллюстрировать различные реализации аспектов настоящей технологии.
Компьютерная система
[00065] Со ссылкой сначала на фиг. 1 изображена компьютерная система 100, подходящая для использования с некоторыми реализациями настоящей технологии, причем компьютерная система 100 содержит различные компоненты аппаратных средств, включая один или более одноядерных или многоядерных процессоров, совместно представленных процессором 110, твердотельный накопитель 120, память 130, которая может представлять собой память с произвольным доступом или любой другой тип памяти.
[00066] Связь между различными компонентами компьютерной системы 100 может обеспечиваться одной или несколькими внутренними и/или внешними шинами (не показаны) (например, шиной PCI, универсальной последовательной шиной, шиной IEEE 1394 “Firewire”, шиной SCSI, шиной Serial-ATA и т.д.), с которыми электронным способом связаны различные компоненты аппаратных средств. В соответствии с вариантами осуществления настоящей технологии твердотельный накопитель 120 хранит программные инструкции, подходящие для загрузки в память 130 и исполнения процессором 110 для определения наличия объекта. Например, программные инструкции могут представлять собой часть приложения управления транспортным средством, исполняемого процессором 110. Следует отметить, что компьютерная система 100 может иметь дополнительные и/или опциональные компоненты (не изображены), такие как модули сетевой связи, модули локализации и тому подобное.
Сетевая компьютерная среда
[00067] Фиг. 2 иллюстрирует сетевую компьютерную среду 200, подходящую для использования с некоторыми вариантами осуществления систем и/или способов настоящей технологии. Сетевая компьютерная среда 200 содержит электронное устройство 210, ассоциированное с транспортным средством 220 или ассоциированное с пользователем (не изображен), который ассоциирован с транспортным средством 220, таким как оператор транспортного средства 220, сервер 235, осуществляющий связь с электронным устройством 210 через сеть 240 связи (например, Интернет или тому подобного, как будет описано более подробно здесь ниже).
[00068] Необязательно сетевая компьютерная среда 200 может также включать в себя спутник GPS (не изображен), передающий и/или принимающий сигнал GPS на/от электронного устройства 210. Будет понятно, что настоящая технология не ограничена GPS и может использовать технологию позиционирования, отличную от GPS. Следует отметить, что спутник GPS может быть вообще опущен.
[00069] Транспортное средство 220, с которым ассоциировано электронное устройство 210, может содержать любое транспортное средство для транспортировки, для досуга или иного, такое как личный или коммерческий автомобиль, грузовик, мотоцикл или тому подобное. Хотя транспортное средство 220 изображено как наземное транспортное средство, это может быть необязательным в каждом варианте осуществления настоящей технологии. Например, транспортное средство 220 может представлять собой плавучее средство, такое как лодка, или летательный аппарат, такой как летающий дрон.
[00070] Транспортное средство 220 может представлять собой приводимое в действие пользователем или беспилотное транспортное средство. По меньшей мере в некоторых вариантах осуществления настоящей технологии предполагается, что транспортное средство 220 может быть реализовано как беспилотный автомобиль (SDC). Следует отметить, что конкретные параметры транспортного средства 220 являются неограничивающими, эти конкретные параметры включают в себя: производителя транспортного средства, модель транспортного средства, год выпуска транспортного средства, вес транспортного средства, габариты транспортного средства, распределение веса транспортного средства, площадь поверхности транспортного средства, высоту транспортного средства, тип трансмиссии (например, 2x или 4x), тип шин, тормозную систему, топливную систему, пробег в милях, идентификационный номер транспортного средства и размер двигателя.
[00071] Реализация электронного устройства 210 не ограничена конкретно, но в качестве примера, электронное устройство 210 может быть реализовано как блок управления двигателем транспортного средства, CPU транспортного средства, навигационное устройство транспортного средства (например, TomTom™, Garmin™), планшет и персональный компьютер, встроенный в транспортное средство 220, и тому подобное. Таким образом, следует отметить, что электронное устройство 210 может или не может быть постоянно ассоциировано с транспортным средством 220. Дополнительно или альтернативно электронное устройство 210 может быть реализовано в устройстве беспроводной связи, таком как мобильный телефон (например, смартфон или радиофон). В некоторых вариантах осуществления электронное устройство 210 имеет дисплей 270.
[00072] Электронное устройство 210 может содержать некоторые или все из компонентов компьютерной системы 100, изображенной на фиг. 1. В некоторых вариантах осуществления электронное устройство 210 представляет собой бортовое компьютерное устройство и содержит процессор 110, твердотельный накопитель 120 и память 130. Другими словами, электронное устройство 210 содержит аппаратные средства и/или программное обеспечение и/или прошивку или их комбинацию для обработки данных, как будет описано более подробно ниже.
[00073] В некоторых вариантах осуществления настоящей технологии сеть 240 связи представляет собой Интернет. В альтернативных не ограничивающих вариантах осуществления сеть 240 связи может быть реализована как любая подходящая локальная сеть (LAN), глобальная сеть (WAN), частная сеть связи или тому подобное. Следует понимать, что реализации для сети 240 связи представлены только в целях иллюстрации. Линия связи (не пронумерована отдельно) обеспечена между электронным устройством 210 и сетью 240 связи, реализация которой будет зависеть, помимо прочего, от того, как реализовано электронное устройство 210. Только в качестве примера и не для ограничения, в тех вариантах осуществления настоящей технологии, где электронное устройство 210 реализовано как устройство беспроводной связи, такое как смартфон или устройство навигации, линия связи может быть реализована как беспроводная линия связи. Примеры беспроводных линий связи включают в себя, но без ограничения, линию сети связи 3G, линию сети связи 4G и тому подобное. Сеть 240 связи может также использовать беспроводное соединение с сервером 235.
[00074] В некоторых вариантах осуществления настоящей технологии сервер 235 реализован как компьютерный сервер и может содержать некоторые или все из компонентов компьютерной системы 100 согласно фиг. 1. В одном не ограничивающем примере, сервер 235 реализован как сервер Dell™ PowerEdge™, применяющий операционную систему Microsoft™ Windows Server™, но может также быть реализован в любых других подходящих аппаратных средствах, программном обеспечении и/или прошивке или их комбинации. В изображенных не ограничивающих вариантах осуществления настоящей технологии сервер представляет собой одиночный сервер. В альтернативных не ограничивающих вариантах осуществления настоящей технологии (не показаны) функциональность сервера 235 может быть распределена и может быть реализована посредством множества серверов.
[00075] В некоторых не ограничивающих вариантах осуществления настоящей технологии процессор 110 электронного устройства 210 может осуществлять связь с сервером 235, чтобы принимать одно или несколько обновлений. Обновления могут представлять собой, но без ограничения, обновления программного обеспечения, обновления карты, обновления маршрутов, обновления погоды и тому подобное. В некоторых вариантах осуществления настоящей технологии процессор 110 может также быть выполнен с возможностью передачи на сервер 235 определенных операционных данных, таких как пройденные маршруты, данные трафика, данные производительности и тому подобное. Некоторые или все данные, передаваемые между транспортным средством 220 и сервером 235, могут быть зашифрованными и/или сохраняющими анонимность.
[00076] Следует отметить, что разнообразие сенсоров и систем может использоваться электронным устройством 210 для сбора информации об окружении 250 транспортного средства 220. Как видно на фиг. 2, транспортное средство 220 может быть оборудовано множеством систем 280 сенсоров. Следует отметить, что разные системы сенсоров из множества систем 280 сенсоров могут использоваться для сбора разных типов данных касательно окружения 250 транспортного средства 220.
[00077] В одном примере, множество систем 280 сенсоров может содержать одну или более систем сенсоров типа камеры, которые смонтированы на транспортном средстве 220 и соединены с возможностью связи с процессором 110. В широком смысле слова одна или более систем сенсоров типа камеры могут быть выполнены с возможностью сбора данных изображения о различных участках окружения 250 транспортного средства 220. В некоторых случаях данные изображения, обеспеченные одной или более системами сенсоров типа камеры, могут использоваться электронным устройством 210 для выполнения процедур обнаружения объекта. Например, электронное устройство 210 может быть выполнено с возможностью подачи данных изображения, обеспеченных одной или более системами сенсоров типа камеры, на нейронную сеть обнаружения объектов (ODNN), которая была обучена локализовать и классифицировать потенциальные объекты в окружении 250 транспортного средства 220.
[00078] В другом примере множество систем 280 сенсоров может содержать одну или более систем сенсоров типа радара, которые смонтированы на транспортном средстве 220 и соединены с возможностью связи с процессором 110. В широком смысле слова одна или более систем сенсоров типа радара могут быть выполнены с возможностью использования радиоволн для сбора данных о различных участках окружения 250 транспортного средства 220. Например, одна или более систем сенсоров типа радара могут быть выполнены с возможностью сбора данных радара о потенциальных объектах в окружении 250 транспортного средства 220, и эти данные могут представлять расстояние до объектов от системы сенсора типа радара, ориентацию объектов, быстроту и/или скорость объектов и тому подобное.
[00079] Следует отметить, что множество систем 280 сенсоров может содержать дополнительные типы систем сенсоров помимо тех, которые не исчерпывающе описаны выше, и без отклонения от объема настоящей технологии.
[00080] Кроме того, транспортное средство 220 оборудовано одной или более системами обнаружения и определения дальности с помощью света (LiDAR) для сбора информации об окружении 250 транспортного средства 220. Лидарные системы могут иметься в дополнение к множеству систем 280 сенсоров или в некоторых случаях вместо них. Данная лидарная система 230 из одной или более лидарных систем может монтироваться на транспортном средстве 220 или переоснащать его в различных местоположениях и/или различных конфигурациях.
[00081] Например, данная лидарная система 230 может быть смонтирована на внутреннем верхнем участке лобового стекла транспортного средства 220. Тем не менее, как проиллюстрировано на фиг. 2, другие местоположения для монтажа данной лидарной системы 230 входят в объем настоящего раскрытия, в том числе, на заднем стекле, боковых стеклах, капоте, крыше, решетке радиатора, переднем бампере или на стороне транспортного средства 220. В некоторых случаях, данная лидарная система 230 может быть даже установлена в специальном корпусе, смонтированном наверху транспортного средства 220.
[00082] Как упомянуто выше, лидарная система 230 может также быть смонтирована в различных конфигурациях.
[00083] В одном варианте осуществления, таком как вариант осуществления согласно фиг. 2, данная лидарная система 230 из одной или более лидарных систем смонтирована на крыше транспортного средства 220 в поворотной конфигурации. Например, данная лидарная система 230, смонтированная в транспортном средстве 220 в поворотной конфигурации, может содержать по меньшей мере некоторые компоненты, которые вращаются на 360 градусов вокруг оси вращения данной лидарной системы 230. Следует отметить, что данная лидарная система 230, смонтированная в поворотных конфигурациях, может собирать данные о большинстве участков окружения 250 транспортного средства 220.
[00084] В другом варианте осуществления, таком как вариант осуществления согласно фиг. 2, данная лидарная система 230 из одной или более лидарных систем смонтирована сбоку или на решетке радиатора, например, в неповоротной конфигурации. Например, данная лидарная система 230, смонтированная на транспортном средстве 220 в неповоротной конфигурации, может содержать по меньшей мере некоторые компоненты, которые не вращаются на 360 градусов и выполнены с возможностью сбора данных о предварительно заданных участках окружения 250 транспортного средства 220.
[00085] Независимо от конкретного местоположения и/или конкретной конфигурации данной лидарной системы 230 лидарная система 230 выполнена с возможностью захвата данных об окружении 250 транспортного средства 220 для построения многомерной карты объектов в окружении 250 транспортного средства 220. То, как данная лидарная система 230выполнена с возможностью захвата данных об окружении 250 транспортного средства 220, будет описано далее.
Лидарная система
[00086] Со ссылкой на фиг. 3 изображен неограничивающий пример лидарной системы 310. Следует отметить, что лидарная система 230 (см. фиг. 2) может быть реализована аналогично реализации лидарной системы 310.
[00087] В широком смысле слова лидарная система 310 может содержать множество внутренних компонентов, таких как, но без ограничения: (i) компонент 312 источника света (также упоминаемый как “компонент источника излучения”), (ii) компонент 316 сканера, (iii) компонент 318 приемника (также упоминаемый как “система обнаружения”) и (iv) компонент 320 контроллера. Предполагается, что в дополнение к внутренним компонентам, не исчерпывающе перечисленным выше, лидарная система 310 может дополнительно содержать множество датчиков (таких как, например, датчик температуры, датчик влажности и т.д.), которые опущены на фиг. 3 для ясности.
[00088] В определенных вариантах осуществления, один или более внутренних компонентов лидарной системы 310 могут быть реализованы в общем корпусе 340 как изображено на фиг. 3. В других реализациях, по меньшей мере компонент 320 контроллера может быть расположен за пределами общего корпуса 340 и, необязательно, удаленно от него.
Компонент источника света
[00089] Компонент 312 источника света соединен с возможностью связи с компонентом 320 контроллера и выполнен с возможностью испускания излучения, такого как сигнал излучения в форме пучка. В определенных вариантах осуществления компонент 312 источника света выполнен с возможностью излучения света. Компонент 312 источника света содержит один или более лазеров, которые излучают свет, имеющий конкретную рабочую длину волны. Рабочая длина волны компонента 312 источника света может быть в инфракрасном, видимом и/или ультрафиолетовом участках электромагнитного спектра. Например, компонент 312 источника света может включать в себя один или более лазеров с рабочей длиной волны между около 650 нм и 1150 нм. Альтернативно источник света может включать в себя лазерный диод, выполненный с возможностью излучения света на длине волны между около 800 нм и около 1000 нм, между около 850 нм и около 950 нм или между около 1300 нм и около 1600 нм. Однако следует отметить, что компонент 312 источника света может включать в себя лазеры с разными рабочими длинами волн без отклонения от объема настоящей технологии. В определенных других вариантах осуществления компонент 312 источника света содержит светоизлучающий диод (LED).
[00090] При работе компонент 312 источника света генерирует выходной пучок 322 света. Предполагается, что выходной пучок 322 может иметь любую подходящую форму, такую как непрерывная волна или импульс. Как проиллюстрировано на фиг. 3, выходной пучок 322 выходит из лидарной системы 310 и направляется от места излучения в направлении окружения 250.
[00091] Пусть объект 330 расположен на расстоянии 390 от лидарной системы 310. Однако следует отметить, что, как будет пояснено ниже более подробно, присутствие объекта 330 и расстояние 390 не известны априори, и целью лидарной системы 310 является определить местоположение объекта 330 и/или захватить данные для построения многомерной карты по меньшей мере участка окружения 250 с объектом 330 (и другими потенциальными объектами), представленным на ней в форме одной или более точек данных.
[00092] Когда выходной пучок 322 достигает объекта 330, объект 330 может отражать по меньшей мере часть света из выходного пучка 322, и некоторые из отраженных пучков света могут возвращаться в направлении лидарной системы 310. Под отраженным понимается, что по меньшей мере часть пучка света из выходного пучка 322 отражается от объекта 330. Часть пучка света из выходного пучка 322 может поглощаться объектом 330.
[00093] В примере, проиллюстрированном на фиг. 3, отраженный пучок света представлен входным пучком 324. Входной пучок 324 захватывается лидарной системой 310 посредством компонента 318 приемника. Следует отметить, что, в некоторых случаях, входной пучок 324 может содержать только относительно малую долю света из выходного пучка 322. Следует также отметить, что угол входного пучка 324 относительно поверхности объекта 330 (“угол падения”) может быть таким же или отличным от угла выходного пучка 322 относительно поверхности объекта 330 (“угла отражения”).
[00094] Рабочая длина волны лидарной системы 310 может лежать в пределах участков электромагнитного спектра, которые соответствуют свету, создаваемому солнцем. Поэтому, в некоторых случаях, солнечный свет может действовать как фоновый шум, который может затенять световой сигнал, обнаруживаемый лидарной системой 310. Этот солнечный фоновый шум может приводить к ложноположительным обнаружениям и/или может иным образом искажать измерения лидарной системы 310 . Хотя может быть приемлемым повышать отношение сигнала к шуму (SNR) лидарной системы 310 путем повышения уровня мощности выходного пучка 322, это может быть нежелательно по меньшей мере в некоторых ситуациях. Например, повышение уровней мощности выходного пучка 322 может привести к тому, что лидарная система 310 будет небезопасной для зрения.
[00095] Предполагается, что лидарная система 310 может содержать безопасный для зрения лазер, или, иными словами, лидарная система 310 может быть классифицирована как безопасная для зрения лазерная система или лазерный продукт. В широком смысле слова, безопасный для зрения лазер, лазерная система или лазерный продукт может представлять собой систему с некоторым или всем из: длины волны излучения, средней мощности, пиковой мощности, пиковой интенсивности, энергии импульса, размера пучка, расходимости пучка, длительности экспозиции или сканируемого выходного пучка, такими, что свет, излучаемый из этой системы, имеет низкую возможность или не имеет никакой возможности причинения вреда глазам человека.
[00096] Как было упомянуто ранее, компонент 312 источника света может включать в себя один или более импульсных лазеров, выполненных с возможностью генерирования, испускания или излучения импульсов света с определенной длительностью импульса. Например, компонент 312 источника света может быть выполнен с возможностью излучения импульсов с длительностью импульса (например, шириной импульса) в диапазоне от 10 пс до 100 нс. В другом примере компонент 312 источника света может излучать импульсы с частотой повторения импульсов приблизительно от 100 кГц до 5 МГц или периодом импульсов (например, временем между последовательными импульсами) приблизительно от 200 нс до 10 мкс. В целом, однако, компонент 312 источника света может генерировать выходной пучок 322 с любой подходящей средней оптической мощностью, и выходной пучок 322 может включать в себя оптические импульсы с любой подходящей энергией импульса или пиковой оптической мощностью для данного приложения.
[00097] В некоторых вариантах осуществления компонент 312 источника света может содержать один или более лазерных диодов, таких как, но без ограничения: лазерный диод Фабри-Перо, лазер на квантовой яме, лазер с распределенным брэгговским отражателем (DBR), лазер с распределенной обратной связью (DFB) или лазер поверхностного излучения с вертикальным резонатором (VCSEL). Только в качестве примеров, данный лазерный диод, работающий в компоненте 312 источника света, может представлять собой лазерный диод на арсениде алюминия-галлия (AlGaAs), лазерный диод на арсениде индия-галлия (InGaAs) или лазерный диод на арсениде-фосфиде индия-галлия (InGaAsP) или любой другой подходящий лазерный диод. Также предполагается, что компонент 312 источника света может включать в себя один или более лазерных диодов, которые модулируются током, чтобы генерировать оптическое импульсы.
[00098] В некоторых вариантах осуществления выходной пучок 322, излучаемый компонентом 312 источника света, представляет собой коллимированный оптический пучок с любой расходимостью пучка, подходящей для данного приложения. В широком смысле слова расходимость выходного пучка 322 представляет собой угловую меру увеличения размера пучка (например, радиуса пучка или диаметра пучка) по мере того, как выходной пучок 322 распространяется от компонента 312 источника света или лидарной системы 310. В некоторых вариантах осуществления выходной пучок 322 может иметь, по существу, круговое поперечное сечение.
[00099] Также предполагается, что выходной пучок 322, излучаемый компонентом 312 источника света, может быть не поляризован или произвольно поляризован, может не иметь конкретной или фиксированной поляризации (например, поляризация может изменяться по времени) или может иметь конкретную поляризацию (например, выходной пучок 322 может быть линейно поляризованным, эллиптически поляризованным или иметь круговую поляризацию).
[000100] По меньшей мере в некоторых вариантах осуществления выходной пучок 322 и входной пучок 324 могут быть, по существу, коаксиальными. Другими словами, выходной пучок 322 и входной пучок 324 могут по меньшей мере частично перекрываться или совместно использовать общую ось распространения, так что входной пучок 324 и выходной пучок 322 распространяются вдоль, по существу, одного и того же оптического маршрута (хотя и в противоположных направлениях). Тем не менее, в других вариантах осуществления предполагается, что выходной пучок 322 и входной пучок 324 могут не быть коаксиальными, или другими словами, могут не перекрываться или не использовать совместно общую ось распространения внутри лидарной системы 310 без отклонения от объема настоящей технологии.
[000101] Следует отметить, что по меньшей мере в некоторых вариантах осуществления настоящей технологии компонент 312 источника света может вращаться, например, на 360 градусов или меньше, вокруг оси вращения (не изображена) лидарной системы 310, когда лидарная система 310 реализована во вращаемой конфигурации. Однако в других вариантах осуществления компонент 312 источника света может быть стационарным, даже когда лидарная система 310 реализована во вращаемой конфигурации, без отклонения от объема настоящей технологии.
Внутренние пути пучков
[000102] Как схематично проиллюстрировано на фиг. 3, лидарная система 310 может использовать данный внутренний путь пучка из множества внутренних путей 314 пучков для излучения выходного пучка 322 (сгенерированного компонентом 312 источника света) в направлении окружения 250. В одном примере, данный внутренний путь пучка из множества внутренних путей 314 пучков может позволять предоставлять свет от компонента 312 источника света на компонент 316 сканера, и, в свою очередь, компонент 316 сканера может позволять направлять выходной пучок 322 от места излучения в направлении окружения 250.
[000103] Также лидарная система 310 может использовать другой данный внутренний путь пучка из множества внутренних путей 314 пучков для предоставления входного пучка 324 на компонент 318 приемника. В одном примере, другой данный внутренний путь пучка среди множества внутренних путей 314 пучков может позволить предоставить входной пучок 324 от компонента 316 сканера на компонент 318 приемника. В другом примере, другой данный внутренний путь пучка среди множества внутренних путей 314 пучков может позволить предоставить входной пучок 324 непосредственно из окружения 250 на компонент 318 приемника (без прохождения входного пучка 324 через компонент 316 сканера).
[000104] Следует отметить, что множество внутренних путей 314 пучков могут содержать множество оптических компонентов. Например, лидарная система 310 может включать в себя один или более оптических компонентов, выполненных с возможностью преобразования, формирования, фильтрации, модифицирования, управления или направления выходного пучка 322 и/или входного пучка 324. Например, лидарная система 310 может включать в себя одну или более линз, зеркал, фильтров (например, полосовых или интерференционных фильтров), оптических волокон, циркуляторов, разделителей пучка, поляризаторов, поляризующих разделителей пучка, волновых пластинок (например, полуволновых или четвертьволновых пластинок), дифракционных элементов, микроэлектромеханических (MEM) элементов, коллиматорных элементов или голографических элементов.
[000105] Предполагается, что по меньшей мере в некоторых вариантах осуществления данный внутренний путь пучка и другой внутренний путь пучка из множества внутренних путей 314 пучков могут совместно использовать по меньшей мере некоторые общие оптические компоненты, однако это может не требоваться в каждом варианте осуществления настоящей технологии.
Компонент сканера
[000106] Говоря в общем, компонент 316 сканера направляет выходной пучок 322 в одном или более направлениях от места излучения в направлении окружения 250. Компонент 316 сканера может содержать множество оптических компонентов и/или компонентов механического типа для выполнения сканирования выходного пучка 322. Например, компонент 316 сканера может включать в себя одно или более зеркал, призм, линз, MEM компонентов, пьезоэлектрических компонентов, оптических волокон, разделителей, дифракционных элементов, коллиматорных элементов и тому подобного. Следует отметить, что компонент 316 сканера может также включать в себя один или более приводов (не проиллюстрированы), приводящих в действие по меньшей мере некоторые оптические компоненты, например, чтобы вращаться, наклоняться, поворачиваться или перемещаться по углу вокруг одной или более осей.
[000107] Компонент 316 сканера может быть выполнен с возможностью сканирования выходного пучка 322 во множестве горизонтальных угловых диапазонов и/или вертикальных угловых диапазонов. Другими словами, компонент 316 сканера может приводиться в действие, чтобы предоставлять лидарной системе 310 желательную область, 380 представляющую интерес (ROI). ROI 380 лидарной системы 310 может относиться к площади, объему, области, угловому диапазону и/или участку(ам) окружения 250, для сканирования которых лидарная система 310 может быть выполнена с возможностью захвата и/или может захватывать данные.
[000108] Следует отметить, что компонент 316 сканера может быть выполнен с возможностью сканирования выходного пучка 322 горизонтально и/или вертикально, и как таковая ROI 380 лидарной системы 310 может иметь горизонтальное направление и вертикальное направление. Например, лидарная система 310 может иметь горизонтальную ROI 380 в 360 градусов и вертикальную ROI 380 в 45 градусов.
[000109] Компонент 316 сканера может быть соединен с возможностью связи с компонентом 320 контроллера. Например, компонент 320 контроллера может быть выполнен с возможностью управления компонентом 316 сканера, чтобы направлять выходной пучок 322 в желательном направлении от места излучения и/или по желательному растру. В широком смысле слова растр может относиться к диаграмме или пути, по которому выходной пучок 322 направляется компонентом 316 сканера во время работы.
[000110] Лидарная система 310 может таким образом использовать растр, чтобы генерировать облако точек, по существу, охватывающее ROI 380 лидарной системы 310. Как будет описано более подробно здесь дополнительно ниже, это облако точек лидарной системы 310 может использоваться, чтобы визуализировать многомерную карту объектов в окружении 250 транспортного средства 220.
[000111] При работе в определенных вариантах осуществления компонент 312 источника света излучает импульсы света (представленные выходным пучком 322), которые компонент 316 сканера сканирует по ROI 380 лидарной системы 310 в соответствии с растром. Как упомянуто выше, объект 330 может отражать один или несколько излучаемых импульсов. Компонент 318 приемника принимает или обнаруживает фотоны из входного пучка 324 и генерирует одно или несколько представлений сигналов данных. Например, компонент 318 приемника может генерировать выходной электрический сигнал (не изображен), который представляет входной пучок 324. Компонент 318 приемника может также обеспечивать сгенерированный таким образом электрический сигнал на компонент 320 контроллера для дополнительной обработки.
Компонент приемника
[000112] Компонент 318 приемника соединен с возможностью связи с компонентом 320 контроллера и может быть реализован разнообразными способами. Например, компонент 318 приемника может содержать фотоприемник, оптический приемник, оптический датчик, детектор, фотодетектор, оптический детектор, оптические волокна и тому подобное. Как упомянуто выше, в некоторых вариантах осуществления компонент 318 приемника получает или обнаруживает по меньшей мере часть входного пучка 324 и вырабатывает электрический сигнал, который соответствует входному пучку 324. Например, если входной пучок 324 включает в себя оптический импульс, компонент 318 приемника может выработать электрический ток или импульс напряжения, который соответствует оптическому импульсу, обнаруженному компонентом 318 приемника.
[000113] Предполагается, что компонент 318 приемника может быть реализован с помощью одного или более лавинных фотодиодов (APD), одного или более однофотонных лавинных диодов (SPAD), одного или более PN-фотодиодов (например, со структурой фотодиода, сформированной полупроводником р-типа и полупроводником n-типа), одного или более PIN-фотодиодов (например, со структурой фотодиода, сформированной нелегированной собственной полупроводниковой областью, расположенной между областями р-типа и n-типа) и тому подобного.
[000114] В некоторых не ограничивающих вариантах осуществления компонент 318 приемника может также содержать схему, которая выполняет усиление сигнала, дискретизацию, фильтрацию, формирование сигнала, аналого-цифровое преобразование, время-цифровое преобразование, детектирование импульса, пороговое детектирование, детектирование нарастающего фронта, детектирование спадающего фронта и тому подобное. Например, компонент 318 приемника может включать в себя электронные компоненты, выполненные с возможностью преобразования принятого фототока (например, ток, выработанный посредством APD в ответ на принятый оптический сигнал) в сигнал напряжения. Компонент 318 приемника может также включать в себя дополнительную схему для формирования аналогового или цифрового выходного сигнала, который соответствует одной или более характеристикам (например, нарастающему фронту, спадающему фронту, амплитуде, длительности и тому подобному) принятого оптического импульса.
Компонент контроллера
[000115] В зависимости от реализации компонент 320 контроллера может включать в себя один или более процессоров, специализированную интегральную схему (ASIC), программируемую вентильную матрицу (FPGA) и/или другую подходящую схему. Компонент 320 контроллера может также включать в себя не-временную считываемую компьютером память для хранения инструкций, исполняемых компонентом 320 контроллера, а также данных, которые компонент 320 контроллера может формировать на основе сигналов, полученных от других внутренних компонентов лидарной системы 310, и/или может обеспечивать сигналы на другие внутренние компоненты лидарной системы 310. Память может включать в себя энергозависимые (например, RAM) и/или энергонезависимые (например, флэш-память, жесткий диск) компоненты. Компонент 320 контроллера может быть выполнен с возможностью генерирования данных во время работы и сохранения их в памяти. Например, эти данные, сгенерированные компонентом 320 контроллера, могут указывать точки данных в облаке точек лидарной системы 310.
[000116] Предполагается, что по меньшей мере в некоторых неограничивающих вариантах осуществления настоящей технологии, компонент 320 контроллера может быть реализован аналогично электронному устройству 210 и/или компьютерной системе 100, без отклонения от объема настоящей технологии.
[000117] В дополнение к сбору данных от компонента 318 приемника, компонент 320 контроллера может также быть выполнен с возможностью предоставления управляющих сигналов на и потенциального приема диагностических данных от компонента 312 источника света и компонента 316 сканера.
[000118] Как изложено ранее, компонент 320 контроллера соединен с возможностью связи с одним или более из компонента 312 источника света, компонента 316 сканера и компонента 318 приемника. Компонент 320 контроллера может принимать электрические запускающие импульсы от компонента 312 источника света, где каждый электрический запускающий импульс соответствует излучению оптического импульса компонентом 312 источника света. Компонент 320 контроллера может дополнительно предоставлять инструкции, управляющий сигнал и/или запускающий сигнал на компонент 312 источника света, указывая, когда компонент 312 источника света должен формировать оптические импульсы.
[000119] Только в качестве примера, компонент 320 контроллера может быть выполнен с возможностью отправления электрического запускающего сигнала, который включает в себя электрические импульсы, так что компонент 312 источника света излучает оптический импульс в ответ на каждый электрический импульс электрического запускающего сигнала. Также предполагается, что компонент 320 контроллера может побуждать компонент 312 источника света регулировать одну или более характеристик света, формируемого компонентом 312 источника света, таких как, но без ограничения: частота, период, длительность, энергия импульса, пиковая мощность, средняя мощность и длина волны оптических импульсов.
[000120] Следует отметить, что компонент 320 контроллера может быть выполнен с возможностью определения значения “времени пролета” для оптического импульса на основе информации тайминга, ассоциированной с тем, (i) когда данный импульс был излучен компонентом 312 источника света, и (ii) когда часть импульса (например, из входного пучка 324) была обнаружена или принята компонентом 318 приемника.
[000121] Предполагается, что компонент 320 контроллера может быть выполнен с возможностью анализа одной или более характеристик электрических сигналов от компонента 312 источника света и/или компонента 318 приемника, чтобы определять одну или более характеристик объекта 330, таких как расстояние 390 от места излучения из лидарной системы 310.
[000122] Например, компонент 320 контроллера может определять значение времени пролета и/или значение модуляции фазы для излученного импульса выходного пучка 322. Положим, что лидарная система 310 определяет значение “T” времени пролета, представляющее по смыслу время “двустороннего распространения” для излученного импульса, чтобы пройти от лидарной системы 310 на объект 330 и обратно на лидарную систему 310. В результате компонент 320 контроллера может быть выполнен с возможностью определения расстояния 390 в соответствии со следующим уравнением:
где D обозначает расстояние 390, T обозначает значение времени пролета, и c обозначает скорость света (приблизительно 3,0×108 м/с).
[000123] Как было упомянуто ранее, лидарная система 310 может использоваться, чтобы определять расстояние до одного или более других потенциальных объектов, расположенных в окружении 250. Путем сканирования выходного пучка 322 по ROI 380 лидарной системы 310 в соответствии с растром, лидарная система 310 выполнена с возможностью отображения расстояния (аналогичные расстоянию 390) на соответственные точки данных в ROI 380 лидарной системы 310. В результате лидарная система 310 может быть выполнена с возможностью визуализации этих точек данных, захваченных последовательно (например, облака точек), в форме многомерной карты.
[000124] В качестве примера, эта многомерная карта может использоваться электронным устройством 210 для обнаружения или идентификации иным образом объектов или определения формы или расстояния потенциальных объектов в ROI 380 лидарной системы 310. Предполагается, что лидарная система 310 может быть выполнена с возможностью повторного/итерационного захвата и/или генерирования облака точек с любой подходящей скоростью для данного приложения.
[000125] Следует отметить, что местоположение данного объекта в окружении 250 транспортного средства 220 может перекрываться, охватываться или заключаться по меньшей мере частично в ROI лидарной системы 310. Например, объект 330 может включать в себя, полностью или частично, человека, транспортное средство, мотоцикл, грузовик, поезд, велосипед, кресло-каталку, детскую коляску, пешехода, животное, дорожный знак, светофор, разметку полосы, дорожную разметку, пространство парковки, дорожный конус, отбойник, дорожное заграждение, выбоину, железнодорожный переезд, препятствие на дороге или рядом с ней, бордюр, остановившееся транспортное средство на дороге или рядом с ней, опору воздушной линии, дом, здание, мусорный бак, почтовый ящик, дерево, любой другой подходящий объект или любую подходящую комбинацию, полностью или частично, двух или более объектов.
Конкретные компоненты системы
[000126] Со ссылкой на фиг. 4, изображена реализация лидарной системы 310, выполненная в соответствии с конкретным неограничивающим вариантом осуществления настоящей технологии.
[000127] Более конкретно, в лидарной системе 310, компонент 312 источника света содержит лазер 402 и необязательно коллиматор 404 для генерации и излучения выходного пучка 322 на предварительно заданной длине волны в направлении области, представляющей интерес; и компонент 318 приемника содержит оптический детектор 406, соединенный с возможностью связи с оптическим волокном 408 на обратном маршруте, оптическое волокно 408 на обратном маршруте имеет компонент 410 фильтра для отделения полезной части входного пучка 324 от шумовой части входного пучка 324. Полезная часть имеет длину волны, соответствующую предварительно заданной длине волны выходного пучка 322, а шумовая часть имеет длины волны за пределами предварительно заданной длины волны.
[000128] Следует отметить, что другие элементы могут присутствовать, но не быть проиллюстрированы в целях ясности.
[000129] В определенных вариантах осуществления сгенерированный выходной пучок 322 содержит множество последовательных выходных пучков. Дополнительно каждый выходной пучок 322 может коллимироваться и/или модулироваться коллиматором 404. В определенных вариантах осуществления лазер 402 выполнен с возможностью излучения света на предварительно заданной длине волны в 1550 нм. В этих вариантах осуществления полезная часть входного пучка 324 может рассматриваться как длина волны или диапазон длин волн, включающий 1550 нм, такой как одно из: 1550 нм ± 1 нм; 1550 нм ± 2 нм; 1550 нм ± 3 нм; 1550 нм ± 4 нм; 1550 нм ± 5 нм; 1550 нм ± 10 нм; и 1550 нм ± 20 нм. Шумовая часть входного пучка 324 может рассматриваться как длина волны, отличная от 1550 нм, или длины волн за пределами предварительно заданного диапазона длин волн.
[000130] Как обсуждалось ранее, лидарная система 310 может использовать данный внутренний путь пучка из множества внутренних путей 314 пучков для излучения выходного пучка 322 в направлении ROI 380. В этом отношении, компонент 316 сканера может содержать любую подходящую систему для излучения выходного пучка к ROI 380. Без ограничения, в определенных вариантах осуществления компонент 316 сканера содержит привод, связанный с передающим оптическим волокном, привод выполнен с возможностью модулировать выходной конец передающего оптического волокна как описано в российской заявке, озаглавленной “Системы и способы на основе лидара для обнаружения объектов в области, представляющей интерес”, содержание которой включено в настоящий документ посредством ссылки. В определенных вариантах осуществления компонент 316 сканера содержит микроэлектромеханический (MEM) компонент и необязательно пассивные отражающие компоненты для усиления сканируемой зоны с использованием выходного пучка 322, как описано в российской патентной заявке, озаглавленной “Системы и способы на основе лидара для обнаружения объектов в области, представляющей интерес”, содержание которой включено в настоящий документ посредством ссылки.
[000131] В определенных вариантах осуществления лидарная система представляет собой вращательную систему, и один или более из компонента 312 источника света, компонента 316 сканера и лидарной системы 310 могут быть выполнены с возможностью вращения горизонтально для сканирования ROI 380. В этом отношении может быть обеспечена платформа (не показана) внутри лидарной системы 310 или как часть общего корпуса 340, например, для поддержки одного или более из компонента 312 источника света, компонента 316 сканера и лидарной системы 310 для горизонтального движения.
[000132] При отражении от объекта 330 в ROI 380, оптическое волокно 408 на обратном маршруте скомпоновано, чтобы захватывать входной пучок 324, и чтобы передавать входной пучок 324 на оптический детектор 406. Оптическое волокно 408 на обратном маршруте может быть скомпоновано, чтобы захватывать входной пучок 324 непосредственно из ROI 380 или опосредованно через оптические компоненты (не показаны), скомпонованные, чтобы направлять или передавать входной пучок 324. Обратный маршрут 409 входного пучка 324 может иметь подучасток, который представляет собой тот же самый путь, что и маршрут 411 передачи выходного пучка 322, или маршрут 409 передачи и обратный маршрут 409 могут быть отдельными.
[000133] В определенных вариантах осуществления оптический детектор 406 представляет собой широкополосный детектор, такой как полупроводниковый фотодиод. В определенных вариантах осуществления лидарная система 310 обеспечена одиночным оптическим детектором 406. Широкополосный детектор может быть выполнен с возможностью захвата в пределах +/-30 градусов и передачи на детектор 0,1 нанометра, например, со всеми другими отфильтрованными длинами волны.
[000134] Возвращаясь теперь к оптическому волокну 408 на обратном маршруте и компоненту 410 фильтра, как изложено ранее, компонент 410 фильтра выполнен так, чтобы отделять полезную часть входного пучка 324 от шумовой части входного пучка 324. В определенных вариантах осуществления компонент 410 фильтра содержит волоконную брэгговскую решетку (FBG), сформированную в оптическом волокне 408 на обратном маршруте, FBG содержит части сердцевины 412 оптического волокна 408 на обратном маршруте, имеющие коэффициент преломления, иной, чем у других частей сердцевины 412. FBG в определенных вариантах осуществления функционирует как диэлектрическое зеркало, отражающее определенные длины волн и передающее другие длины волн. В определенных вариантах осуществления FBG выполнен с возможностью отражения полезной части входного пучка 324 на оптический детектор 406 (фиг. 4). Как проиллюстрировано схематично на фиг. 5, входной пучок 324 содержит широкий диапазон длин волн. При помощи FBG полезная часть входного пучка 324, которая представляет собой более узкий поднабор входного пучка 324, отражается на оптический детектор 406 (фиг. 6), а оставшаяся часть входного пучка 324 передается по оптическому волокну 408 на обратном маршруте от его входного конца 414 к выходному концу 415.
[000135] В определенных других вариантах осуществления FBG выполнена с возможностью передачи полезной части входного пучка 324 на оптический детектор 406 по оптической оси оптического волокна 408 на обратном маршруте от входного конца 414 к выходному концу 415 (фиг. 8). В определенных других вариантах осуществления может обеспечиваться любой другой тип компонента 410 фильтра вместо FBG для отделения полезной части от шумовой части.
[000136] Компонент 318 приемника может включать в себя другие компоненты, которые не показаны на чертежах, например, оптические компоненты, такие как линзы, призмы, зеркала и тому подобное, для направления входного пучка 324 к входному концу 414 оптического волокна 408 на обратном маршруте или фокусировки входного пучка 324. Оптический компонент может находиться на расстоянии, соответствующем фокусному расстоянию света, подлежащего обнаружению.
[000137] Как обсуждалось ранее, лидарная система 310 может использовать данный внутренний путь пучка из множества внутренних путей 314 пучков для излучения выходного пучка 322, сгенерированного компонентом 312 источника света, в направлении ROI 380 и для приема отраженных пучков компонентом 318 приемника.
[000138] Как упомянуто ранее, в определенных вариантах осуществления маршрут 411 передачи выходного пучка 322 к ROI 380 включает в себя подучасток, который является тем же самым, что и обратный маршрут 409 от ROI 380 в направлении оптического детектора 406. Другими словами, выходной пучок 322 и входной пучок 324 могут по меньшей мере частично перекрываться или совместно использовать общую ось распространения, так что выходной пучок 322 и входной пучок 324 распространяются, по существу, по одному и тому же оптическому пути (хотя и в разных направлениях).
[000139] Вариант осуществления этой реализации проиллюстрирован на фиг. 9, на которой маршрут 411 передачи содержит передающее оптическое волокно 418 для передачи выходного пучка 322 от компонента 312 источника света на компонент 316 сканера, где он излучается к ROI 380. Обратный маршрут 409 содержит участок передающего оптического волокна 418 и оптическое волокно 408 на обратном маршруте, соединяющие с возможностью связи компонент 316 сканера с оптическим детектором 406. Как таковой, обратный маршрут 409 включает в себя входной пучок 324, передаваемый компонентом 316 сканера и перенаправляемый на оптический детектор 406 оптическим циркулятором 420. В других вариантах осуществления оптическое волокно 408 на обратном маршруте и передающее оптическое волокно 418 соединены оптическим коннектором (не показан). В таких вариантах осуществления участок передающего оптического волокна 418 функционирует в качестве части как маршрута 411 передачи, так и обратного маршрута 409.
[000140] Передающее оптическое волокно 418 и оптическое волокно 408 на обратном маршруте в этих вариантах осуществления содержат, каждое, оптическое волокно 422 с одиночной оболочкой, имеющее одиночный канал, через который может распространяться свет, в этих случаях сердцевина 424 окружена оболочкой 425. Сердцевина 424 может обеспечивать возможность распространения света в двух противоположных направлениях в разное время.
[000141] Оптический циркулятор 420 соединен с возможностью связи с компонентом 320 контроллера. Компонент 320 контроллера может побуждать оптический циркулятор 420 управлять направлением распространения света через передающее оптическое волокно 418 и оптическое волокно 408 на обратном маршруте. Другими словами, компонент 320 контроллера может побуждать оптический циркулятор 420 перенаправлять входной пучок 324 на оптическое волокно 408 на обратном маршруте. В фазе вывода оптический циркулятор 420 выполнен с возможностью разрешения передачи света в направлении от компонента 312 источника света на компонент 316 сканера. В фазе ввода оптический циркулятор 420 выполнен с возможностью передачи света в направлении от компонента 316 сканера на компонент 318 приемника (от компонента 316 сканера на оптический циркулятор 420 и от оптического циркулятора 420 на компонент 318 приемника через оптическое волокно 408 на обратном маршруте). Компонент 320 контроллера может вызывать модуляцию оптического сканера 420 между фазой ввода и фазой вывода на основе одного или нескольких триггеров. Такие триггеры включают в себя тайминг излучения выходного пучка 322 компонентом 312 источника света, предварительно заданное время и предварительно заданный временной интервал, в качестве лишь некоторых примеров.
[000142] Вариант осуществления лидарной системы 310 согласно фиг. 11 отличается от варианта осуществления системы согласно фиг. 9 тем, что вместо передающего оптического волокна 418, имеющего одиночный канал распространения, передающее оптическое волокно 418 имеет два канала для передачи входного пучка 324 и выходного пучка 322. Один канал передающего оптического волокна 418 предназначен для распространения выходного пучка 322, а другой канал передающего оптического волокна 418 предназначен для распространения входного пучка 324. Структура в поперечном сечении передающего оптического волокна 418 с двумя каналами в определенных неограничивающих вариантах осуществления проиллюстрирована на фиг. 12 и содержит сердцевину 426, внутреннюю оболочку 428 и внешнюю оболочку 430. В определенных вариантах осуществления сердцевина 426 выполнена с возможностью передачи выходного пучка 322, а внутренняя оболочка 428 выполнена с возможностью передачи входного пучка 324. Оптический циркулятор 420 выполнен с возможностью перенаправления входного пучка 324, исходящего от компонента 316 сканера, в оптическое волокно 408 на обратном маршруте. В фазе вывода оптический циркулятор 420 выполнен с возможностью обеспечения передачи света в направлении от компонента 312 источника света на компонент 316 сканера. В фазе ввода оптический циркулятор 420 выполнен с возможностью передачи света от компонента 316 сканера на оптический циркулятор 420 и от оптического циркулятора 420 на компонент 318 приемника через оптическое волокно 408 на обратном маршруте.
[000143] В других вариантах осуществления предполагается, что выходной пучок 322 и входной пучок 324 могут включать в себя подучасток, который является отличающимся путем друг для друга. Другими словами, в определенных вариантах осуществления путь 411 передачи и обратный путь 409 не перекрываются или не используют совместно общую ось распространения внутри лидарной системы 310.
[000144] Примерная реализация таких вариантов осуществления проиллюстрирована на фиг. 13. Лидарная система 310 согласно фиг. 13 отличается от лидарной системы согласно фиг. 9 тем, что передающее оптическое волокно 418 используется только для передачи выходного пучка 322, а оптическое волокно 408 на обратном маршруте используется только для передачи входного пучка 324. Не существует совместно используемого маршрута между входным пучком 324 и выходным пучком 322. В этом отношении оптическое волокно 408 на обратном маршруте соединено с возможностью связи на входном конце с компонентом 318 приемника, а на выходном конце с компонентом 316 сканера.
[000145] Передающее оптическое волокно 418 и оптическое волокно 408 на обратном маршруте могут иметь любую подходящую конфигурацию. В определенных вариантах осуществления передающее оптическое волокно 418 и оптическое волокно 408 на обратном маршруте имеют, каждое, структуру из сердцевины 424 и оболочки 425 (фиг. 14).
[000146] Вариант осуществления лидарной системы 310 согласно фиг. 15 отличается от варианта осуществления лидарной системы согласно фиг. 13 тем, что вместо лидарной системы 310, содержащей одиночное оптическое волокно 408 на обратном маршруте, соединенное с возможностью связи на одном конце с компонентом 318 приемника, может быть обеспечено множество оптических волокон 408 на обратном маршруте и множество компонентов 318 приемника. Каждое из множества оптических волокон 408 на обратном маршруте может быть соединено на одном конце с компонентом 316 сканера, а на своем другом соответственном конце с данным компонентом 318 приемника. Множество оптических волокон 408 на обратном маршруте может быть выполнено как матрица волокон (фиг. 16 и 17). Конфигурация матрицы волокон не ограничена никаким образом и включает в себя ступенчатую конфигурацию, как показано на фиг. 16, и линейную конфигурацию, как показано на фиг. 17. В других дополнительных вариантах осуществления передающее оптическое волокно 418 может содержать множество оптических волокон (не показаны). Количество передающих оптических волокон 418 и оптических волокон 408 на обратном маршруту не ограничено и может содержать любое количество, подходящее для данного приложения.
[000147] Любое из отдельных передающих оптических волокон 418 и оптических волокон 408 на обратном маршруте или матрицы волокон может также включать в себя внешний оболочечный слой 434.
[000148] Возвратимся теперь к оптическому детектору 406 компонента 318 приемника. Фиг. 18 изображает характерную реализацию оптического детектора 406, выполненного в соответствии с конкретным неограничивающим вариантом осуществления настоящей технологии. Как изображено, в определенных вариантах осуществления оптический детектор 406 использует волоконно-оптическую матрицу 450 и множество детекторов 452-1, 452-2,… 452-N. Волоконно-оптическая матрица 450 содержит множество оптических волокон 454, таких как оптические волокна 408 на обратном маршруте, включая компонент 410 фильтра, такой как FBG. Множество оптических волокон 454, ассоциированных с волоконно-оптической матрицей 450, могут быть соединены с множеством детекторов 452-1, 452-2,… 452-N, чтобы формировать N оптических путей 456-1, 456-2,… 456-N от волоконно-оптической матрицы 450 к множеству детекторов 452-1, 452-2,… 452-N.
[000149] В определенных вариантах осуществления множество детекторов 452-1, 452-2,… 452-N взаимно-однозначно соответствуют множеству оптических волокон 454, ассоциированных с волоконно-оптической матрицей 450, и каждый детектор во множестве детекторов 452-1, 452-2,… 452-N может быть выполнен с возможностью приема входного пучка 324 через волоконно-оптическую матрицу 450. Другими словами, данное оптическое волокно 454 волоконно-оптической матрицы 450 ассоциировано с данным детектором из множества детекторов 452-1, 452-2,… 452-N во взаимно-однозначном отношении. В этих вариантах осуществления данное оптическое волокно и данный детектор соединены посредством данного оптического пути.
[000150] В вышеуказанной взаимно-однозначной компоновке множества детекторов 452-1, 452-2,… 452-N и множества оптических волокон 454, можно достичь повышенной плотности точек данных в данной ROI 380 и, таким образом, повышенного разрешения объекта 330 в ROI 380, как будет описано ниже. Под повышенной плотностью точек данных в данной ROI 380 понимается увеличенное количество выходных пучков 322, падающих в ROI 380 в данное время, и, следовательно, увеличенное количество точек данных, определяемых в ROI 380 в данное время.
[000151] В вариантах осуществления с вышеуказанной взаимно-однозначной компоновкой компонент 320 контроллера может быть выполнен с возможностью контроля того, какое из оптических волокон 454 волоконно-оптической матрицы 450 и его ассоциированный детектор принимает конкретный входной пучок 324. При таком процессе контроля компонент 312 источника света может быть выполнен с возможностью излучения выходного пучка 322 без ожидания обнаружения предшествующего входного пучка 324, что приводит в определенных вариантах осуществления к повышенной плотности точек данных.
[000152] Предполагается, что в определенных других вариантах осуществления вместо взаимно-однозначного отношения между оптическими волокнами 454 волоконно-оптической матрицы 450 и множеством детекторов 452-1, 452-2,… 452-N, поднабор множества оптических волокон 454, ассоциированных с волоконно-оптической матрицей 450, может иметь общий детектор из множества детекторов 452-1, 452-2,… 452-N. В этих вариантах осуществления будет существовать множество оптических путей, ассоциированных с одиночным детектором. В таких вариантах осуществления уменьшение количества детекторов может также приводить к экономии затрат. Также, в определенных вариантах осуществления общий детектор из множества детекторов 452-1, 452-2,… 452-N может требовать меньшей мощности и пространства, тем самым снижая требование по физическому пространству и мощности при реализации лидарной системы 310.
[000153] В определенных вариантах осуществления оптический детектор 406 может также включать в себя оптоволоконный коннектор 458 и множество микролинз 460-1, 460-2,… 460-N. Оптоволоконный коннектор 458 может быть выполнен с возможностью соединения множества оптических волокон 454, ассоциированных с волоконно-оптической матрицей 450, с множеством детекторов 452-1, 452-2,… 452-N, чтобы формировать N оптических путей 456-1, 456-2,… 456-N от волоконно-оптической матрицы 450 до множества детекторов 452-1, 452-2,… 452-N. Множество микролинз 460-1, 460-2,… 460-N могут взаимно однозначно соответствовать множеству детекторов 442-1, 442-2,… 442-N и могут быть выполнены с возможностью сведения входных пучков 324, переданных посредством множества оптических волокон 454, ассоциированных с волоконно-оптической матрицей 450, на соответствующем множестве детекторов 452-1, 452-2,… 452-N.
[000154] Возвращаясь теперь к оптическим волокнам 454, предполагается, что в определенных вариантах осуществления множество оптических волокон 454 могут быть сконструированы как волоконно-оптическая матрица 450 любым способом, таким как лазерная сварка, сварка встык, пайка или тому подобное. Дополнительно, по меньшей мере некоторые из оптических волокон 454 в волоконно-оптической матрице 450 могут иметь ось поддержания поляризации, которая ориентирована или выровнена на основе позиционирования множества оптических волокон. В качестве примера оси поддержания поляризации оптических волокон 454 все выровнены, чтобы быть, по существу, параллельными единой плоскости. Например, ось поддержания поляризации может способствовать управлению и поддержке оптическими волокнами 454 определенных поляризаций, например, линейной поляризации.
[000155] Оптические волокна 454 могут иметь любую подходящую конфигурацию. В определенных вариантах осуществления по меньшей мере некоторые из оптических волокон 454 могут иметь круговое поперечное сечение. В определенных других вариантах осуществления по меньшей мере некоторые из оптических волокон 454 могут иметь поперечное сечение, которое не является круговым, таким как многоугольная (например, восьмиугольная, шестнадцатиугольная или другая подходящая многоугольная) форма, или иметь изогнутую периферию с по меньшей мере одной плоской стороной (например, уплощенной стороной на круговом поперечном сечении), или любую другую форму. Оптические волокна 454 могут иметь любой подходящий коэффициент преломления.
[000156] Предполагается, что отдельные оптические волокна 454 в волоконно-оптической матрице 450 могут быть скомпонованы любым образом, например, выровненными рядами, ступенчатыми рядами, в круговой или спиральной конфигурации или тому подобном. Будет понятно, что физические характеристики волоконно-оптической матрицы 450, а также отдельных оптических волокон 454 не ограничены. Аналогично, приемные концы множества оптических волокон 454, ассоциированных с волоконно-оптической матрицей 450, посредством которой принимается входной пучок 324, могут быть скомпонованы любым образом как двумерная матрица, например, с одинаковым или неодинаковым разнесением. Волоконно-оптическая матрица 450 может иметь одинаковое или неодинаковое количество приемных концов по оси x или оси y.
[000157] В определенных вариантах осуществления обеспечена приемная линза (не показана), выполненная с возможностью фокусирования входного пучка 324 на один из приемных концов оптических волокон 454 волоконно-оптической матрицы 450. В определенных вариантах осуществления расстояние между приемной линзой и одним из приемных концов оптических волокон 454 волоконно-оптической матрицы 450 содержит фокусное расстояние входного пучка 324. Торцевая поверхность волоконно-оптической матрицы 450 может находиться в фокальной плоскости приемной линзы. Дополнительно, для данного временного интервала обнаружения, приемная линза может быть выполнена с возможностью фокусирования разных входных пучков 324 на разных приемных концах оптических волокон 454 волоконно-оптической матрицы 450. В этом отношении в определенных вариантах осуществления приемная линза может быть выполнена с возможностью перемещения или наклона подходящим образом, так что по меньшей мере один из входных пучков 324 может быть сфокусирован на по меньшей мере одном из множества оптических волокон 454. Перемещение приемной линзы может управляться компонентом 320 контроллера.
[000158] Как обсуждалось ранее, в определенных вариантах осуществления множество детекторов 452-1, 452-2,… 452-N может быть выполнено с возможностью обнаружения по меньшей мере оптического сигнала входных пучков 324 и формирования соответствующего электрического сигнала. Например, если входной пучок 324 содержит оптический импульс, множество детекторов 452-1, 452-2,… 452-N могут обнаруживать оптические импульсы и формировать электрические сигналы, такие как электрический ток или импульсы напряжения, которые соответствуют обнаруженным оптическим сигналам.
[000159] Предполагается, что множество детекторов 452-1, 452-2,… 452-N могут быть реализованы как фотодетекторы с одним или несколькими лавинными фотодиодами (APD), одним или несколькими однофотонными лавинными диодами (SPAD), одним или несколькими PN-фотодиодами (например, со структурой фотодиода, сформированной полупроводником р-типа и полупроводником n-типа), одним или несколькими PIN-фотодиодами (например, со структурой фотодиода, сформированной нелегированной собственной полупроводниковой областью, расположенной между областями р-типа и n-типа) и тому подобное.
[000160] Возвращаясь теперь к компоненту 320 контроллера, в определенных вариантах осуществления множество детекторов 452-1, 452-2,… 452-N соединены с возможностью связи с компонентом 320 контроллера. Компонент 320 контроллера выполнен с возможностью приема электрических сигналов от множества детекторов 452-1, 452-2,… 452-N и может дополнительно быть выполнен с возможностью анализа электрических сигналов для обнаружения объекта 330 в ROI 380. Предполагается, что компонент 320 контроллера может использовать любые подходящие методы (такие как методы на основе определения “времени пролета”, как обсуждалось ранее) для обнаружения объектов без отклонения от принципов, представленных здесь.
[000161] Компонент 320 контроллера может дополнительно быть соединен с возможностью связи с компонентом 312 источника света таким образом, что компонент 320 контроллера может быть выполнен с возможностью управления излучением от компонента 312 источника света. В одном варианте осуществления излучение следующего выходного пучка(ов) после излучения выходного пучка 322 может быть скоординировано с обнаружением входных пучков 324 оптическим детектором 416. Как таковой компонент 320 контроллера может быть выполнен с возможностью побуждения компонента 312 источника света излучать выходной пучок (пучки) после того, как был обнаружен входной пучок 324. В других вариантах осуществления компонент 312 источника света может быть выполнен с возможностью работы независимо от оптического детектора 416. То есть компонент 312 источника света может излучать следующий выходной пучок (пучки) без координации с обнаружением входных пучков 324 оптическим детектором 406.
Реализуемые компьютером способы
[000162] Обратимся теперь к фиг. 15, иллюстрирующей блок-схему последовательности операций способа 600 для обнаружения объектов в области, представляющей интерес, в соответствии с различными неограничивающими вариантами осуществления настоящей технологии.
[000163] В некоторых не ограничивающих вариантах осуществления настоящей технологии способ 600 может быть реализован компонентом 320 контроллера, соединенным с возможностью связи с лидарной системой 310. Как обсуждалось ранее, по меньшей мере в некоторых неограничивающих вариантах осуществления настоящей технологии компонент 320 контроллера может включать в себя один или несколько процессоров и может быть реализован аналогично электронному устройству 210 и/или компьютерной системе 100, без отклонения от объема настоящей технологии. Способ 600 начинается на этапе 602.
[000164] Этап 602: побуждение источника излучения излучать выходной пучок в направлении области, представляющей интерес
[000165] На этапе 602, компонент 320 контроллера обеспечивает инструкции, управляющий сигнал и/или сигнал запуска на компонент 312 источника света, указывающие, когда компонент 312 источника света (такой как упомянутый компонент источника света) должен излучать выходной пучок 322 в направлении области 380, представляющей интерес. Выходной пучок 322 имеет предварительно заданную длину волны или предварительно заданный диапазон длин волны. На одном или нескольких этапах, ассоциированных со способом 600, компонент 320 контроллера может быть выполнен с возможностью побуждения компонента 312 источника света к излучению выходного пучка 322 при определенных условиях. Такие условия могут включать в себя одно или несколько из следующего: при действии транспортного средства 220 в беспилотном режиме; когда транспортное средство 220 находится в движении независимо от режима вождения; когда транспортное средство 220 неподвижно; когда транспортное средство 220 первоначально включено; в предварительно заданное время или местоположении; и на основе ручной операции, выполняемой пользователем, приводящим в действие транспортное средство 220, и т.д.
[000166] Этап 604: захват входного пучка в оптическом волокне на обратном маршруте системы обнаружения лидарной системы, причем входной пучок содержит полезную часть, имеющую длину волны, соответствующую предварительно заданной длине волны выходного пучка оптического волокна на обратном маршруте, и шумовую часть, имеющую длины волн за пределами предварительно заданной длины волны
[000167] На этапе 604, способ 600 содержит захват входного пучка 324 в оптическом волокне 408 на обратном маршруте компонента 318 приемника. Входной пучок 324 исходит из ROI 380 и содержит полезную часть, которая включает в себя отраженные части выходного пучка 322 от объекта 330 в ROI 380. Полезная часть имеет предварительно заданную длину волны или диапазон длин волны, соответствующие предварительно заданной длине волны или диапазону длин волны выходного пучка. Входной пучок 324 также включает в себя шумовую часть, имеющую длины волны за пределами предварительно заданной длины волны или диапазона длин волны.
[000168] Захват может также содержать направление входного пучка 324 в оптическое волокно 408 на обратном маршруте и/или фокусировку входного пучка на оптическом волокне 408 на обратном маршруте. В этом отношении, способ может также включать в себя приведение процессором в движение конца оптического волокна на обратном маршруте или приведение в движение оптического компонента.
[000169] Этап 606: отделение полезной части входного пучка от шумовой части
[000170] На этапе 606, способ 600 содержит отделение полезной части входного пучка 324 от шумовой части входного пучка 324. В определенных вариантах осуществления отделение содержит фильтрацию входного пучка 324, например, при помощи компонента 410 фильтра. В определенных вариантах осуществления компонент 410 фильтра содержит волоконную брэгговскую решетку, сформированную в оптическом волокне 408 на обратном маршруте.
[000171] В определенных вариантах осуществления отделение полезной части входного пучка 324 от шумовой части входного пучка 324 содержит отражение полезной части входного пучка 324 на оптический детектор 406 и передачу шумовой части по оптическому маршруту оптического волокна 408 на обратном маршруте.
[000172] В определенных других вариантах осуществления отделение полезной части входного пучка 324 от шумовой части входного пучка 324 содержит передачу полезной части входного пучка 324 по оптическому маршруту оптического волокна 408 на обратном маршруте и отражение шумовой части.
[000173] Этап 608: обнаружение полезной части входного пучка детектором, причем детектор содержит одиночный широкополосный детектор.
[000174] На этапе 608 способ 600 содержит обнаружение полезной части входного пучка 324 оптическим детектором 406, который в определенных вариантах осуществления представляет собой одиночный широкополосный детектор.
[000175] В вариантах осуществления, где оптический детектор 416 представляет собой волоконно-оптическую матрицу 432, способ 600 содержит определение ассоциации между данным детектором из множества детекторов 452, обнаруженным оптическим сигналом и данным выходным пучком 322. В определенных вариантах осуществления, в которых лидарная система 310 включает в себя оптический циркулятор 420, способ 600 содержит обеспечение перенаправления входного пучка 324 в направлении компонента 318 приемника.
[000176] На одном или нескольких неограничивающих этапах, ассоциированных со способом 600, чтобы определить объект 330 в ROI 380, компонент 320 контроллера может быть выполнен с возможностью определения значения “времени пролета” для пучка света на основе информации тайминга, ассоциированной с тем, (i) когда данный пучок света (например, выходной пучок 322) был излучен компонентом 312 источника света, и (ii) когда полезная часть входного пучка 324 была обнаружена оптическим детектором 406.
[000177] На одном или нескольких неограничивающих этапах, ассоциированных со способом 600, процессор может управлять излучением следующего выходного пучка 322 после излучения более раннего выходного пучка 322, и такое излучение может быть скоординировано с обнаружением входного пучка оптическим детектором 416. Как таковой, компонент 320 контроллера может быть выполнен с возможностью побуждения компонента 312 источника света излучать выходной пучок 322 после того, как входной пучок 324 был обнаружен.
[000178] На одном или нескольких неограничивающих этапах, ассоциированных со способом 600, компонент 312 источника света может быть выполнен с возможностью работы независимо от оптического детектора 416. То есть компонент 312 источника света может излучать выходной пучок 322 без координации с обнаружением входного пучка 324, обнаруженного оптическим детектором 416.
[000179] Специалистам в данной области техники должно быть понятно, что по меньшей мере некоторые варианты осуществления настоящей технологии имеют целью расширить диапазон технических решений для решения конкретной технической проблемы, а именно, повышения эффективности лидарной системы при уменьшении бремени аппаратных средств, возлагаемого на различные лидарной системы, за счет введения MEM компонентов и модуляции амплитуды осцилляций, ассоциированных с MEM компонентами, для избирательного управления интервалами выходного пучка (пучков).
[000180] Модификации и усовершенствования вышеописанных реализаций настоящей технологии могут стать очевидными специалистам в данной области техники. Подразумевается, что предшествующее описание является иллюстративным, а не ограничивающим. Поэтому подразумевается, что объем настоящей технологии ограничивается только объемом прилагаемой формулы изобретения.
[000181] В то время как вышеописанные реализации были описаны и показаны со ссылкой на конкретные этапы, выполняемые в конкретном порядке, будет понятно, что эти этапы могут комбинироваться, подразделяться или переупорядочиваться без отклонения от идей настоящей технологии. Соответственно, порядок и группировка этапов не ограничивают настоящую технологию.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИДАРНАЯ (LiDAR) СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ ОБЪЕКТОВ В ИНТЕРЕСУЮЩЕЙ ОБЛАСТИ И СПОСОБ НА ЕЕ ОСНОВЕ | 2019 |
|
RU2762618C2 |
| СПОСОБЫ И СИСТЕМЫ ОБНАРУЖЕНИЯ С ПОМОЩЬЮ ЛИДАРА (LiDAR) С ВОЛОКОННО-ОПТИЧЕСКОЙ МАТРИЦЕЙ | 2019 |
|
RU2762744C2 |
| СПОСОБЫ И СИСТЕМЫ НА ОСНОВЕ ЛИДАРА (LIDAR) С РАСШИРЕННЫМ ПОЛЕМ ЗРЕНИЯ НА ОСНОВЕ ПАССИВНЫХ ЭЛЕМЕНТОВ | 2019 |
|
RU2745882C1 |
| ЛИДАРНЫЕ (LIDAR) СПОСОБЫ И СИСТЕМЫ СО СКАНИРОВАНИЕМ С ИЗБИРАТЕЛЬНОЙ ПЛОТНОСТЬЮ НА ОСНОВЕ MEMS | 2019 |
|
RU2752016C2 |
| СПОСОБЫ И СИСТЕМЫ ОБНАРУЖЕНИЯ ЛИДАРОВ | 2020 |
|
RU2775823C2 |
| Лидарные системы и способы определения расстояния от лидарной системы до объекта | 2020 |
|
RU2798360C2 |
| ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ | 2021 |
|
RU2821361C1 |
| ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ | 2021 |
|
RU2829187C1 |
| ОПТИЧЕСКИЕ СИСТЕМЫ И СПОСОБЫ УПРАВЛЕНИЯ ИМИ | 2020 |
|
RU2793241C2 |
| СКАНЕР ДЛЯ ЛИДАРНОЙ СИСТЕМЫ, ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ С ИСПОЛЬЗОВАНИЕМ СКАНЕРА | 2020 |
|
RU2781619C2 |
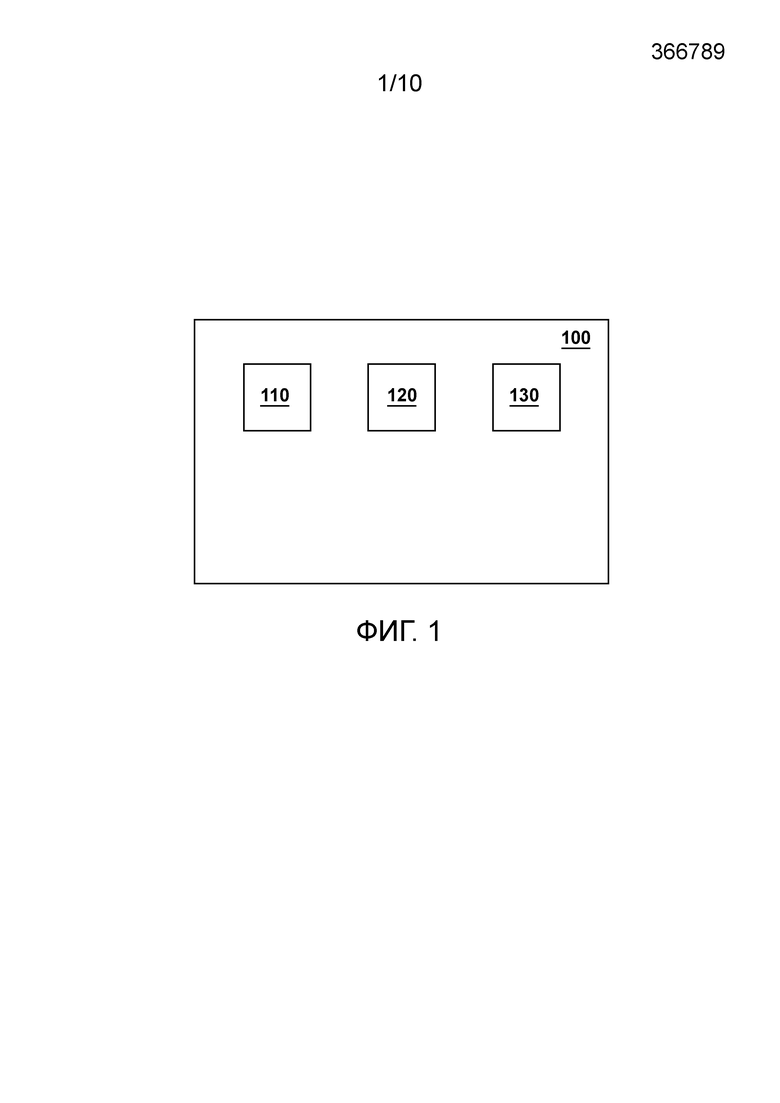
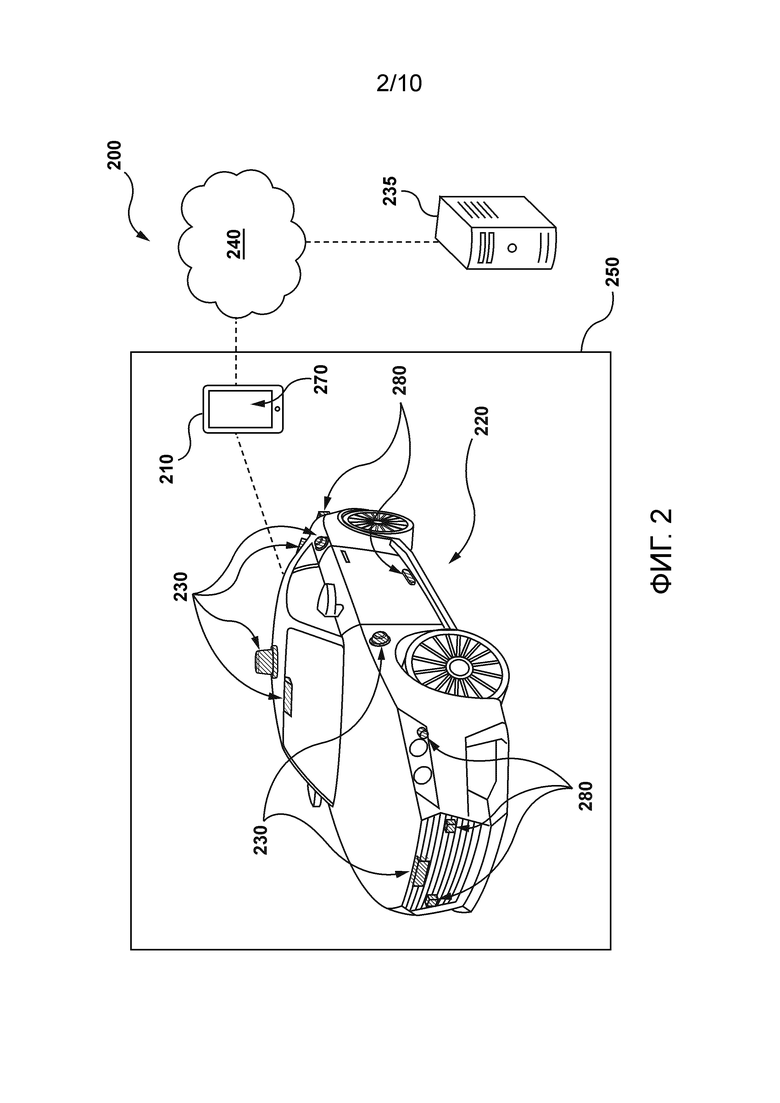
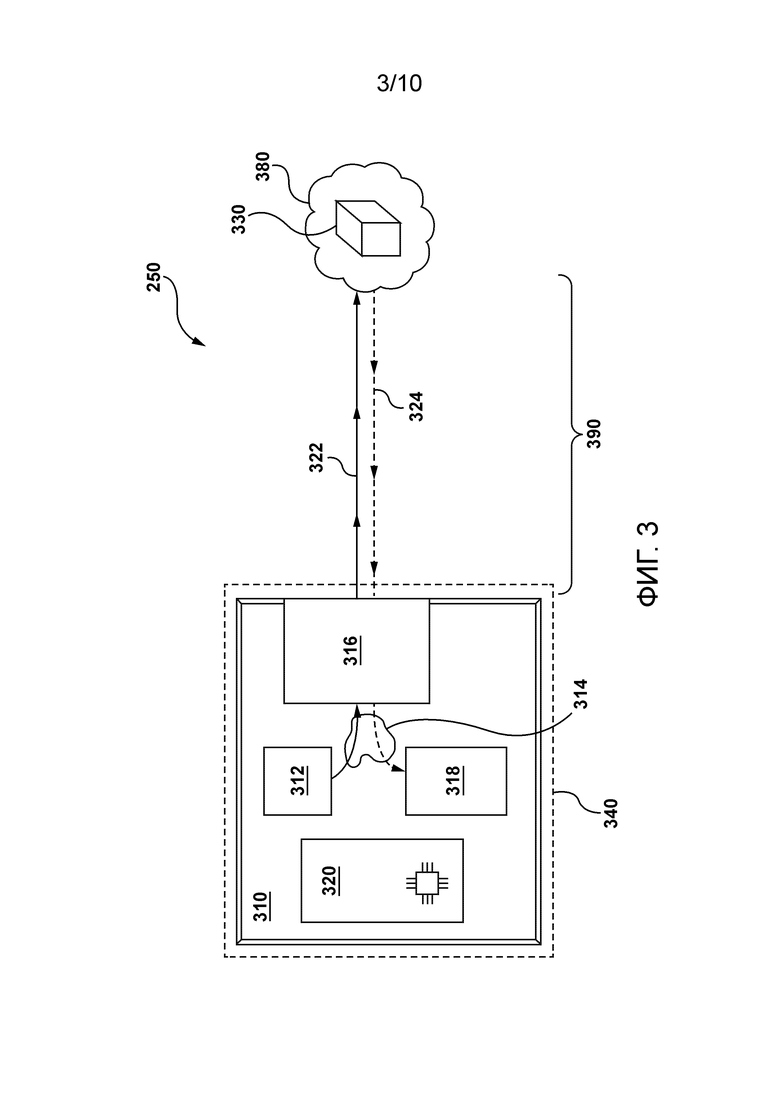
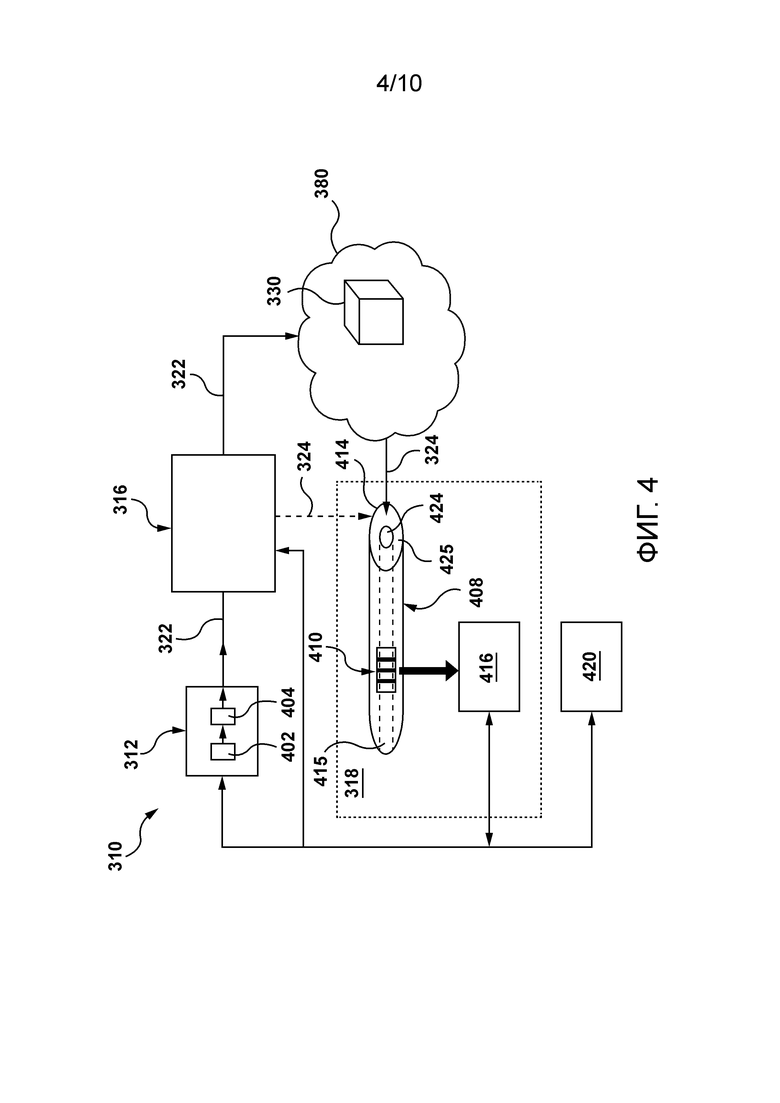
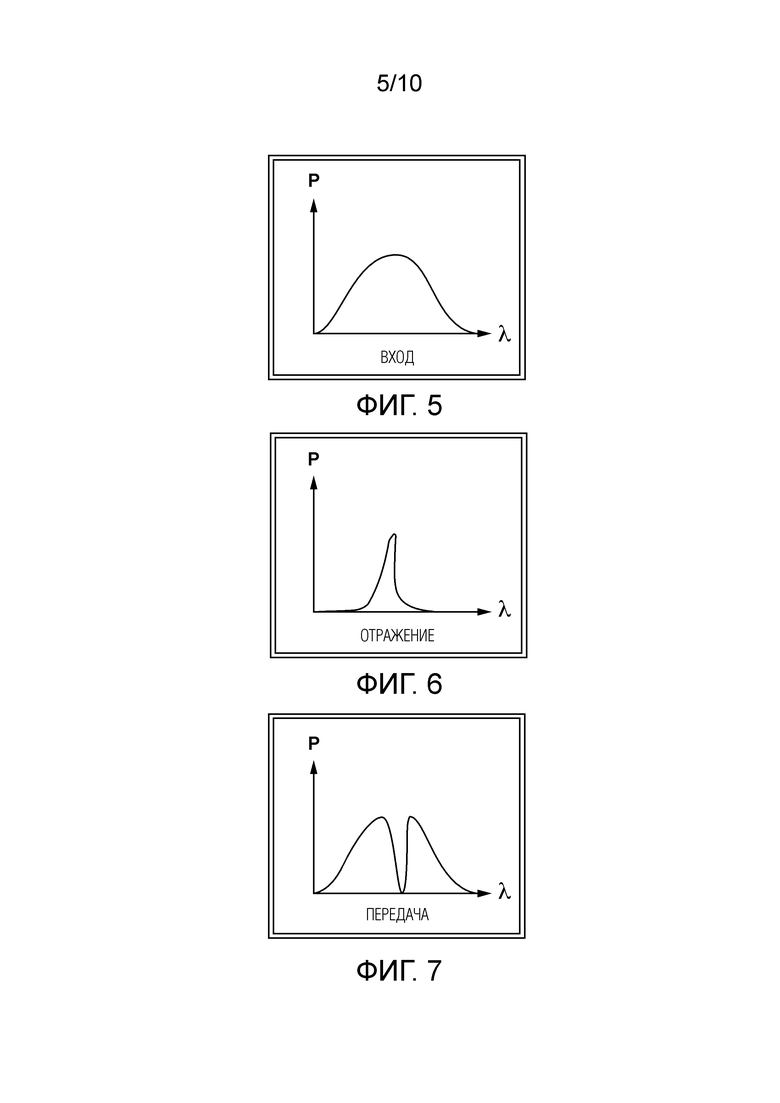
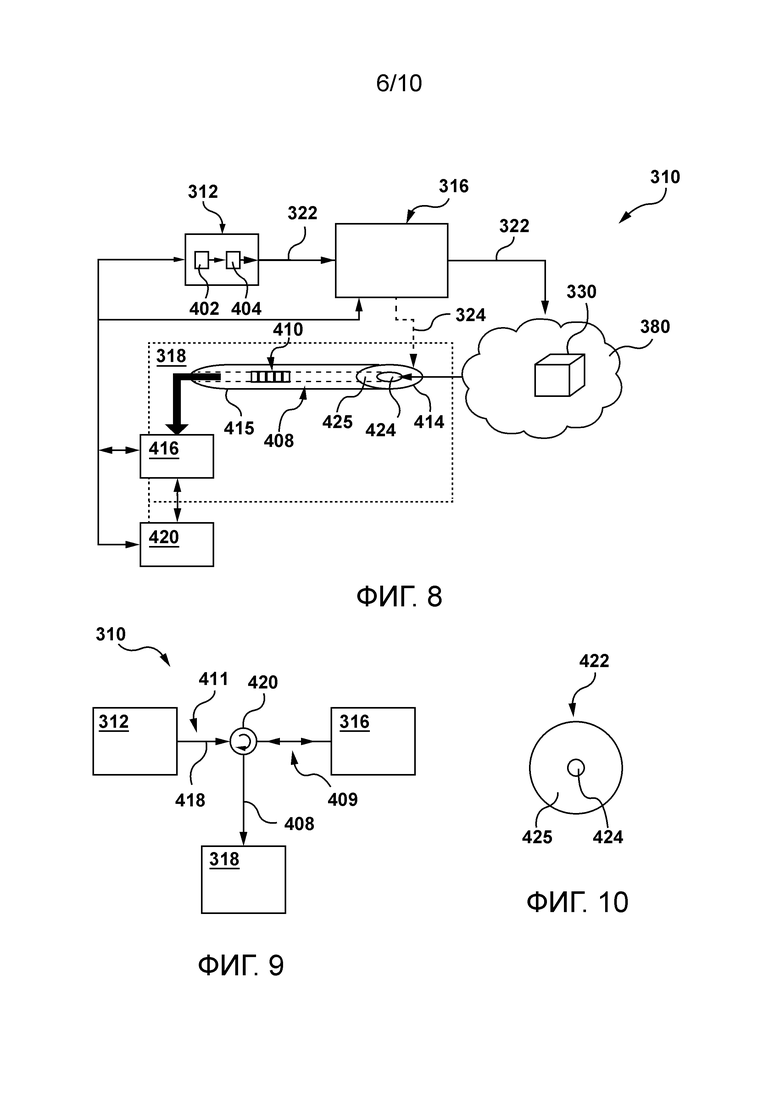
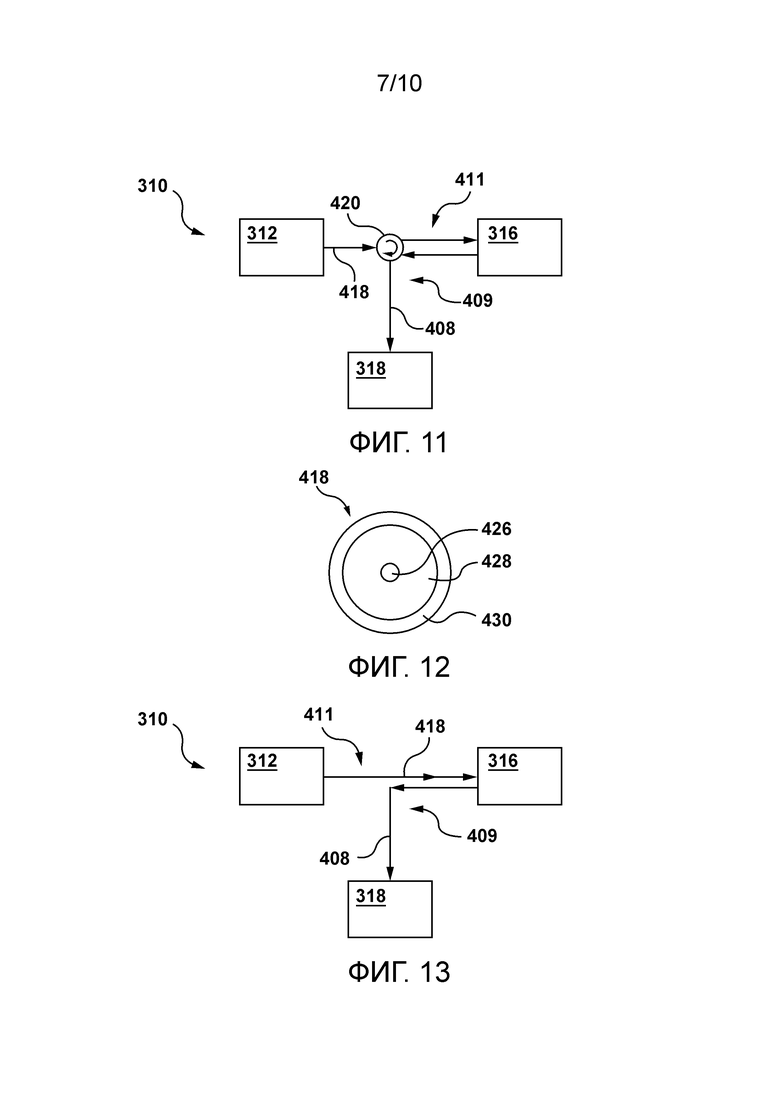
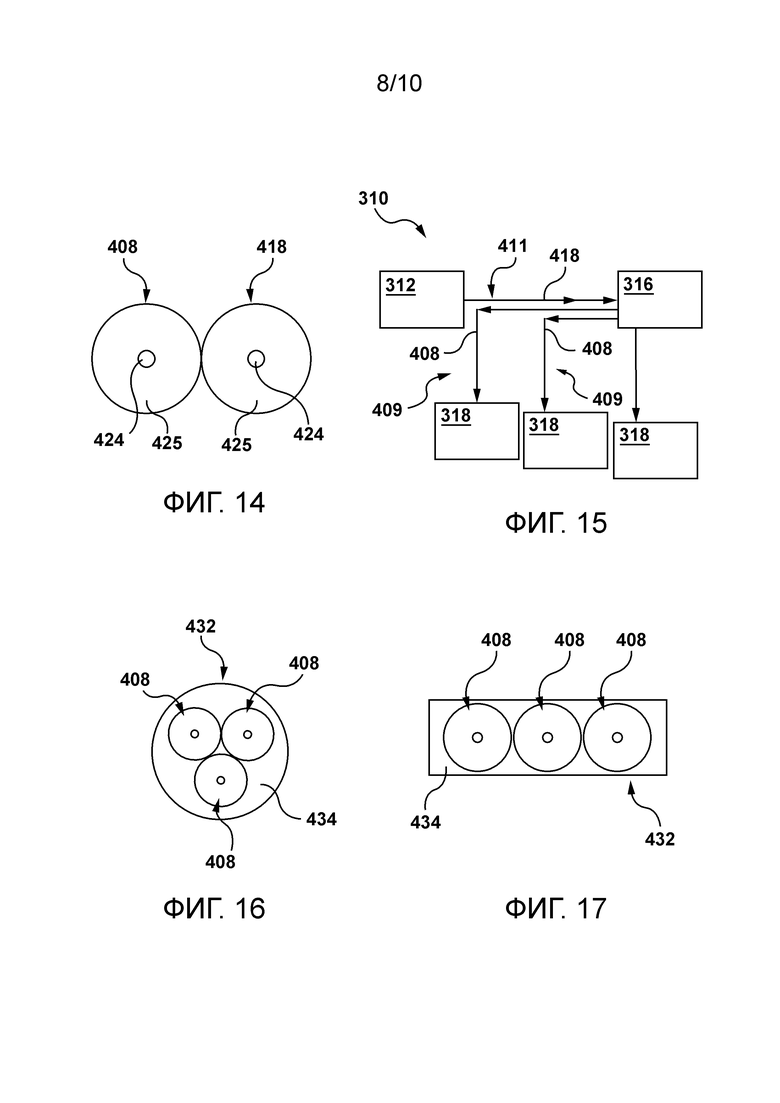
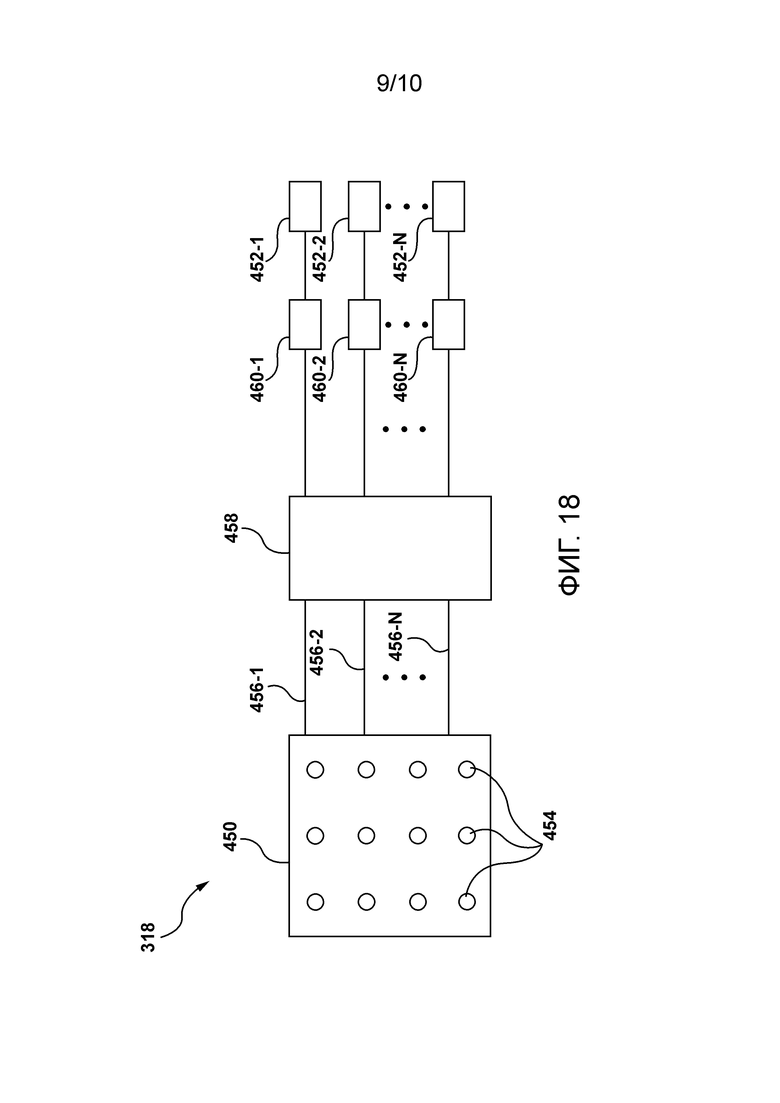
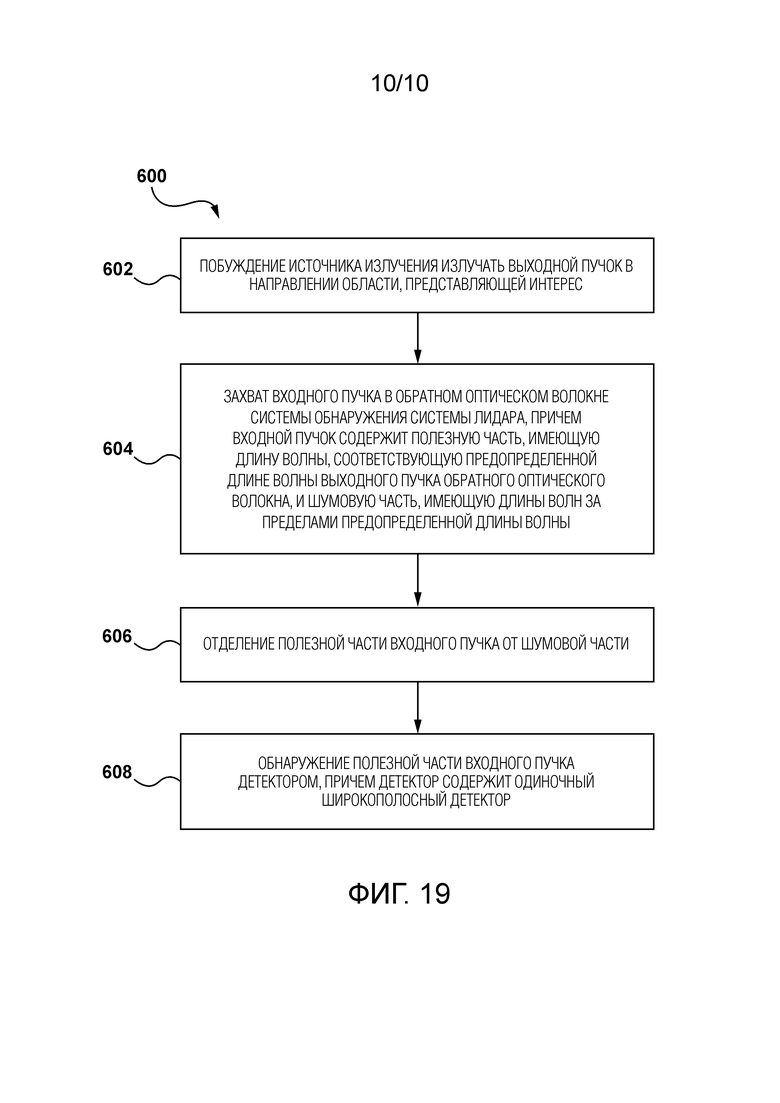
Изобретение относится к системам и способам обнаружения и определения дальности с помощью света (LiDAR) для обнаружения объектов. Лидарная (LiDAR) система для обнаружения объектов в области, представляющей интерес, причем система содержит: источник излучения для излучения выходного пучка на предварительно заданной длине волны в направлении области, представляющей интерес; систему обнаружения для обнаружения входного пучка из области, представляющей интерес, причем система обнаружения включает в себя: оптическое волокно на обратном маршруте, выполненное с возможностью захвата входного пучка, причем входной пучок содержит полезную часть, имеющую длину волны, соответствующую предварительно заданной длине волны выходного пучка, и шумовую часть, имеющую длины волн за пределами предварительно заданной длины волны, при этом оптическое волокно на обратном маршруте включает в себя: фильтр на волоконной брэгговской решетке (FBG) для фильтрации входного пучка, чтобы отделять полезную часть входного пучка от шумовой части; и одиночный широкополосный детектор для приема полезной части входного пучка. Технический результат – увеличение надежности. 2 н. и 17 з.п. ф-лы, 19 ил.
1. Лидарная (LiDAR) система для обнаружения объектов в области, представляющей интерес, причем система содержит:
источник излучения для излучения выходного пучка на предварительно заданной длине волны в направлении области, представляющей интерес;
систему обнаружения для обнаружения входного пучка из области, представляющей интерес, причем система обнаружения включает в себя:
оптическое волокно на обратном маршруте, выполненное с возможностью захвата входного пучка, причем входной пучок содержит
полезную часть, имеющую длину волны, соответствующую предварительно заданной длине волны выходного пучка, и
шумовую часть, имеющую длины волн за пределами предварительно заданной длины волны,
при этом оптическое волокно на обратном маршруте включает в себя:
фильтр на волоконной брэгговской решетке (FBG) для фильтрации входного пучка, чтобы отделять полезную часть входного пучка от шумовой части; и
одиночный широкополосный детектор для приема полезной части входного пучка.
2. Лидарная система по п. 1, причем фильтр на волоконной брэгговской решетке выполнен с возможностью передачи полезной части входного пучка на одиночный широкополосный детектор по оптическому каналу оптического волокна на обратном маршруте.
3. Лидарная система по п. 1, причем фильтр на волоконной брэгговской решетке выполнен с возможностью отражения полезной части входного пучка на одиночный широкополосный детектор.
4. Лидарная система по п. 1, причем маршрут передачи выходного пучка в область, представляющую интерес, включает в себя подучасток, который представляет собой тот же самый путь, что и обратный маршрут из области, представляющей интерес, в направлении одиночного широкополосного детектора.
5. Лидарная система по п. 1, причем маршрут передачи выходного пучка в область, представляющую интерес, включает в себя подучасток, который представляет собой путь, отличный от обратного маршрута из области, представляющей интерес, в направлении одиночного широкополосного детектора.
6. Лидарная система по п. 4, причем маршрут передачи содержит передающее оптическое волокно, подучасток маршрута передачи, который представляет собой тот же самый путь, что и обратный маршрут, содержит участок передающего оптического волокна, который избирательно соединен с возможностью связи с оптическим волокном на обратном маршруте.
7. Лидарная система по п. 6, дополнительно содержащая оптический циркулятор для избирательной передачи входного пучка из области, представляющей интерес, в оптическое волокно на обратном маршруте.
8. Лидарная система по п. 6, причем передающее оптическое волокно и обратное оптическое волокно содержат, каждое, сердцевину и оболочечную структуру.
9. Лидарная система по п. 4, причем подучасток маршрута передачи, который представляет собой тот же самый путь, что и обратный маршрут, содержит волокно с двойной оболочкой, причем волокно с двойной оболочкой имеет первую часть для передачи выходного пучка и вторую часть для передачи входного пучка.
10. Лидарная система по п. 9, дополнительно содержащая оптический циркулятор для избирательной передачи входного пучка из области, представляющей интерес, в оптическое волокно на обратном маршруте.
11. Лидарная система по п. 5, причем подучасток маршрута передачи, который представляет собой путь, отличный от обратного маршрута, содержит отдельные оптические волокна, первое оптическое волокно для передачи выходного пучка и второе оптическое волокно для передачи входного пучка.
12. Лидарная система по п. 11, причем второе оптическое волокно представляет собой оптическое волокно на обратном маршруте.
13. Лидарная система по п. 1, причем оптическое волокно на обратном маршруте содержит матрицу оптических волокон, причем каждое оптическое волокно имеет приемный конец, причем приемные концы оптических волокон выполнены в двумерной матрице; и приемную линзу для фокусировки данного входного пучка на данный приемный конец данного оптического волокна на обратном маршруте волоконно-оптической матрицы.
14. Лидарная система по п. 13, дополнительно содержащая микроэлектромеханический (MEM) компонент для приема выходного пучка на отражающей поверхности MEM компонента и для отражения выходного пучка в направлении области, представляющей интерес, причем MEM компонент выполнен с возможностью осцилляции относительно первой оси осцилляции с первой амплитудой осцилляции для расширения выходного пучка на вертикальный интервал вдоль вертикальной оси в области, представляющей интерес.
15. Лидарная система по п. 1, дополнительно содержащая микроэлектромеханический (MEM) компонент для приема выходного пучка на отражающей поверхности MEM компонента и для отражения выходного пучка в направлении области, представляющей интерес, причем MEM компонент выполнен с возможностью осцилляции относительно первой оси осцилляции с первой амплитудой осцилляции для расширения выходного пучка на вертикальный интервал вдоль вертикальной оси в области, представляющей интерес.
16. Лидарная система по п. 1, причем предварительно заданная длина волны выходного пучка составляет около 1550 нм.
17. Способ на основе лидара (LiDAR) для обнаружения объектов в области, представляющей интерес, причем способ реализуют процессором, соединенным с возможностью связи с лидарной системой, при этом способ содержит:
побуждение источника излучения излучать выходной пучок в направлении области, представляющей интерес;
захват входного пучка в оптическом волокне на обратном маршруте системы обнаружения лидарной системы, причем входной пучок содержит полезную часть, имеющую длину волны, соответствующую предварительно заданной длине волны выходного пучка оптического волокна на обратном маршруте, и шумовую часть, имеющую длины волн за пределами предварительно заданной длины волны,
отделение полезной части входного пучка от шумовой части; и
обнаружение полезной части входного пучка детектором, причем детектор содержит одиночный широкополосный детектор.
18. Способ на основе лидара по п. 17, причем отделение полезной части входного пучка от шумовой части входного пучка содержит отражение полезной части входного пучка на детектор и передачу шумовой части по обратному оптическому маршруту оптического волокна.
19. Способ на основе лидара по п. 17, причем отделение полезной части входного пучка от шумовой части входного пучка содержит передачу полезной части входного пучка по обратному оптическому маршруту оптического волокна и отражение шумовой части.
| US2018120433A1, 03.05.2018 | |||
| US 10324170 B1, 18.06.2019 | |||
| Горизонтальная рекуперативная печь для нагрева и последующего охлаждения сыпучих материалов в кипящем слое | 1957 |
|
SU116245A1 |
| US 6830184 B2, 14.12.2004 | |||
| WO 2018197246 A1, 01.11.2018 | |||
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2292566C1 |

