[0001] Настоящая технология относится к беспилотным транспортным средствам (SDV) и, в частности, к способу и процессору для управления перемещением в полосе движения SDV.
Уровень техники
[0002] В предшествующем уровне техники предложены и реализованы несколько компьютерных навигационных систем, которые выполнены с возможностью помощи при навигации и/или управлении транспортным средством. Эти системы варьируются от более базовых решений на основе картографической локализации (т.е. от использования компьютерной системы для того, чтобы помогать водителю в осуществлении навигации по маршруту из начального пункта в пункт назначения) до более сложных решений (машинных и/или автономных от водителя систем вождения).
[0003] Некоторые из этих систем реализуются как то, что общеизвестно в качестве системы "круиз-контроля". В этих системах, компьютерная система на борту транспортных средств поддерживает заданную пользователем скорость транспортного средства. Часть системы круиз-контроля реализует систему "интеллектуального управления расстоянием", за счет которой пользователь может устанавливать расстояние до потенциального автомобиля впереди (к примеру, выбирать значение, выражаемое в числе транспортных средств), и компьютерная система регулирует скорость транспортного средства, по меньшей мере, частично на основе транспортного средства, приближающегося к потенциальному транспортному средству впереди в пределах предварительно заданного расстояния. Некоторые системы круиз-контроля дополнительно оснащаются системой предотвращения столкновений, причем эти системы, при обнаружении транспортного средства (или других препятствий) перед движущимся транспортным средством, замедляют или останавливают транспортное средство.
[0004] Некоторые из более продвинутых систем обеспечивают полностью автономное вождение транспортного средства без прямого управления оператора (т.е. водителя), так называемых беспилотных транспортных средств (SDV). Данное SDV включает в себя компьютерные системы, которые могут инструктировать SDV ускоряться, тормозить, останавливаться, сменять полосу движения и автоматически парковаться.
[0005] Одна из технических сложностей в реализации вышеуказанных компьютерных систем заключается в планировании траектории SDV относительно препятствия (например, другого транспортного средства), с которым может столкнуться SDV при вождении. Когда SDV собирается выполнять маневр (например, смену полосы движения), препятствие в одной из соседних полос движения может представлять риск/опасность для SDV, что может требовать от компьютерных систем принятия корректирующих мер, будь то торможение либо в иных случаях активное ускорение, приводящее к заданию траектории SDV таким образом, что SDV должно завершать маневр безопасно, как для SDV, так и для других участников дорожного движения.
[0006] Более конкретно, сложность планирования траектории SDV содержит определение кинематических данных, ассоциированных с SDV в начальный момент времени (в момент начала маневра) и в целевой момент времени (в момент для завершения маневра) таким образом, что SDV должно завершать маневр безопасно относительно по меньшей мере одного препятствия, с которым оно может столкнуться при выполнении маневра. На основе этих данных, компьютерные системы затем могут быть выполнены с возможностью определения более оптимального решения для планирования траектории с точки зрения соблюдения правил техники безопасности, расхода топлива и общего комфорта пассажиров SDV, помимо прочего.
[0007] Острота этой проблемы проиллюстрирована посредством следующего гипотетического сценария. Предположим, что SDV (или частично автономное транспортное средство) едет по данному участку дороги. В некоторой точке, согласно предварительно определенному маршруту, SDV должно сменять полосу движения за предварительно определенный временной интервал (например, чтобы съезжать с шоссе). Тем не менее, имеется другое транспортное средство, движущееся по полосе движения, на которую направляется SDV. Соответственно, траектория SDV должна планироваться таким образом, что SDV должно избегать столкновения с другим транспортным средством.
[0008] Предусмотрено несколько способов определения траектории, известных в данной области техники.
[0009] Патент США 8918273 B2, выданный 23 декабря 2014 года, владельцем которого является Robert Bosch GmbH и озаглавленный "Method for determining the evasion trajectory for the motor vehicle and safety device or safety system", описывает способ для определения оптимизированной траектории уклонения посредством устройства безопасности или системы безопасности, в частности, системы помощи при смене полосы движения и/или системы помощи при осуществлении маневров уклонения электромоторного транспортного средства, причем оптимизированная траектория уклонения выводится водителю транспортного средства, и/или траектория электромоторного транспортного средства необязательно частично адаптируется к оптимизированной траектории уклонения, посредством способа, причем оптимизированная траектория уклонения определяется посредством оптимизации поперечно-динамического коэффициента (J) качества, для которого используются поперечное ускорение (a) и/или поперечный рывок (a') электромоторного транспортного средства. Также описано устройство безопасности или система безопасности, в частности, для системы помощи при смене полосы движения и/или системы помощи при осуществлении маневров уклонения для электромоторного транспортного средства, и способ, выполняющийся и/или выполненный посредством устройства безопасности или системы безопасности.
[0010] Публикация заявки на патент США номер 2019/0084619 A1, опубликованная 21 марта 2019 года, владельцем которой является Subaru Corp. и озаглавленная "Traveling control apparatus of vehicle", описывает устройство управления движением транспортного средства, которое включает в себя контроллер смены полосы движения, детектор позиции и детектор полосы движения. Контроллер смены полосы движения включает в себя формирователи первого и второго курсов, которые, соответственно, формируют первый и второй курсы в качестве целевых курсов транспортного средства в первой и второй полосах движения. Формирователи первого и второго курсов, соответственно, вычисляют первую и вторую целевые величины перемещения, в направлениях ширины первой и второй полос движения, транспортного средства, когда транспортное средство перемещается вдоль первого и второго курсов, и, соответственно, формируют первый и второй курсы на основе первой и второй целевых величин перемещения и первого и второго рывков. Первый и второй рывки представляют собой, каждый, скорость изменения ускорения транспортного средства в направлении ширины первой полосы движения на первом курсе или второй полосы движения на втором курсе.
[0011] Патент США 9868443 B2, выданный 16 января 2018 года, владельцем которого является GM Global Technology Operations LLC и озаглавленный "Reactive path planning for autonomous driving", описывает способ адаптивного повторного формирования запланированного пути для маневра автономного вождения. Карта объектов формируется на основе считываемых объектов на дороге, по которой осуществляется движение. Таймер сбрасывается и активируется. Запланированный путь формируется для автономного маневрирования транспортного средства вокруг считываемых объектов. Транспортное средство автономно маневрирует вдоль запланированного пути. Карта объектов обновляется на основе считываемых данных из устройств на транспортном средстве. Проверка системы безопасности выполняется для определения того, является ли запланированный путь осуществимым, на основе обновленной карты объектов. Запланированный путь повторно формируется в ответ на определение, что существующий путь не является осуществимым, в противном случае, выполняется определение в отношении того, истек ли таймер. Если таймер не истек, то проверка системы безопасности выполняется повторно; иначе делается возврат для перепланирования пути.
Сущность изобретения
[0012] Задача настоящей технологии заключается в том, чтобы смягчать по меньшей мере некоторые неудобства, присутствующие в предшествующем уровне техники. Варианты осуществления настоящей технологии могут обеспечивать и/или расширять объем подходов к способам достижения целей и задач настоящей технологии.
[0013] Разработчики настоящей технологии выявили по меньшей мере одну техническую проблему, связанную с подходами предшествующего уровня техники.
[0014] Например, для того, чтобы SDV безопасным образом сменяло полосу движения, SDV должно рассматривать кинематические данные (такие как скорость и ускорение) другого транспортного средства с тем, чтобы избегать столкновения с ним. В этом отношении, предусмотрено по меньшей мере два варианта планирования траектории SDV: (1) смена полосы движения, включающая в себя опережение другого транспортного средства, и (2) смена полосы движения без опережения других транспортных средств, т.е. позволяя другому транспортному средству проезжать первым. Один подход к выбору одного варианта по сравнению с другим может быть основан на связанной с ним эффективности энергопотребления SDV.
[0015] Разработчики настоящей технологии выяснили, что в целом рывки в полосе движения (скорость изменения ускорения SDV в продольном направлении относительно траектории SDV), ассоциированные с каждым из возможных вариантов планирования траектории SDV, выполняющего маневр, могут представлять эффективность энергопотребления SDV. Например, разработчики отметили, что резкое ускорение и/или замедление требуют от SDV расходовать больше энергии по сравнению с режимом вождения при достаточно постоянном ускорении/замедлении. Соответственно, чем резче ускорение/замедление SDV во время маневра, тем больше энергии требуется SDV для того, чтобы завершать маневр.
[0016] Разработчики настоящей технологии также выявили, что рывки в полосе движения, ассоциированные с каждым из вариантов для планирования траектории SDV, выполняющего маневр, могут указывать плавность перемещения SDV, что представляет собой фактор, оказывающий влияние на комфорт пассажиров.
[0017] В отличие от некоторых подходов предшествующего уровня техники, настоящая технология направлена на вычисление, для каждого возможного варианта для планирования траектории SDV, профиля скорости (набора значений скорости и ускорения в пределах предварительно определенных временных интервалов), минимизирующего ассоциированные с ним рывки в полосе движения, и последующий выбор наиболее эффективного с точки зрения рывков варианта для планирования участка траектории SDV, ассоциированного с перемещением в полосе движения.
[0018] В соответствии с первым широким аспектом настоящей технологии обеспечен способ управления перемещением в полосе движения беспилотного транспортного средства (SDV). SDV движется в полосе движения по участку дороги. Перемещение в полосе движения SDV управляется для обеспечения возможности SDV выполнять будущий маневр. Будущий маневр должен выполняться в предварительно определенный будущий момент времени. Способ осуществляется посредством электронного устройства, соединенного с возможностью связи с SDV. Способ содержит: получение, посредством электронного устройства, начальных кинематических данных, ассоциированных с препятствием, которые указывают начальное состояние препятствия в начальный момент времени, при этом начальный момент времени находится раньше во времени, чем упомянутый предварительно определенный будущий момент времени; определение, посредством электронного устройства, будущих кинематических данных, ассоциированных с препятствием, которые указывают будущее состояние препятствия в упомянутый предварительно определенный будущий момент времени; получение, посредством электронного устройства, начальных кинематических данных, ассоциированных с SDV, которые указывают начальное состояние SDV в начальный момент времени; определение, посредством электронного устройства, будущих кинематических данных, ассоциированных с SDV, которые указывают по меньшей мере два возможных варианта будущих состояний SDV в упомянутый предварительно определенный будущий момент времени, причем упомянутые по меньшей мере два возможных варианта будущих состояний SDV обеспечивают возможность SDV выполнять будущий маневр в упомянутый предварительно определенный будущий момент времени; определение, посредством электронного устройства, по меньшей мере двух возможных вариантов наборов данных переходов состояния для перехода SDV из начального состояния SDV в соответствующий один из упомянутых по меньшей мере двух возможных вариантов будущих состояний SDV с использованием перемещения в полосе движения; определение, посредством электронного устройства, оценочного показателя энергоэффективности для соответствующего одного из упомянутых по меньшей мере двух возможных вариантов наборов данных переходов состояния, причем данный оценочный показатель энергоэффективности указывает то, насколько топливоэффективным является переход между начальным состоянием и соответствующим возможным вариантом будущего состояния; и инициирование, посредством электронного устройства, управления перемещением в полосе движения SDV на основе целевого набора данных переходов состояния из числа упомянутых по меньшей мере двух возможных вариантов наборов данных переходов состояния, при этом целевой набор данных переходов состояния представляет собой наиболее топливоэффективный набор данных переходов состояния из числа упомянутых по меньшей мере двух возможных вариантов наборов данных переходов состояния.
[0019] В некоторых реализациях способа способ дополнительно содержит сравнение, посредством сервера, оценочных показателей энергоэффективности упомянутых по меньшей мере двух возможных вариантов наборов данных переходов состояния для определения целевого набора данных переходов состояния.
[0020] В некоторых реализациях способа способ дополнительно содержит: определение, посредством электронного устройства, оценочного показателя соблюдения правил дорожного движения для соответствующего одного из упомянутых по меньшей мере двух возможных вариантов наборов данных переходов состояния. Данный оценочный показатель соблюдения правил дорожного движения указывает, соблюдает ли переход между начальным состоянием и соответствующим возможным вариантом будущего состояния правила дорожного движения упомянутого участка дороги. Целевой набор данных переходов состояния представляет собой наиболее топливоэффективный набор данных переходов состояния из числа упомянутых по меньшей мере двух возможных вариантов наборов данных переходов состояния, который обеспечивает возможность SDV соблюдать правила дорожного движения упомянутого участка дороги.
[0021] В некоторых реализациях способа будущий маневр представляет собой смену полосы движения с начальной полосы движения, в которой SDV движется в начальный момент времени, на другую полосу движения, в которой присутствует препятствие в начальный момент времени.
[0022] В некоторых реализациях способа препятствие представляет собой одно из подвижного препятствия и неподвижного препятствия.
[0023] В некоторых реализациях способа предварительно определенный будущий момент времени представляет собой момент времени, когда SDV не имеет препятствия.
[0024] В некоторых реализациях способа подвижное препятствие представляет собой другое транспортное средство.
[0025] В некоторых реализациях способа данный возможный вариант набора данных переходов состояния включает в себя возможные варианты кинематических данных относительно SDV во множестве промежуточных моментов времени между начальным моментом времени и будущим моментом времени.
[0026] В некоторых реализациях способа инициирование управления перемещением в полосе движения SDV на основе целевого набора данных переходов состояния содержит: инициирование, посредством электронного устройства, управления по меньшей мере одним из ускорения в полосе движения и замедления в полосе движения SDV таким образом, что (i) фактические кинематические данные SDV во множестве промежуточных моментов времени совпадают (ii) с целевыми кинематическими данными из целевого набора данных переходов состояния во множестве промежуточных моментов времени.
[0027] В некоторых реализациях способа определение по меньшей мере двух возможных вариантов наборов данных переходов состояния выполняется посредством алгоритма минимизации рывков в полосе движения, и данный возможный вариант набора данных переходов состояния для SDV задает наиболее эффективный с точки зрения рывков набор данных переходов состояния для перехода SDV из начального состояния SDV в соответствующий возможный вариант будущего состояния SDV с использованием перемещения в полосе движения.
[0028] В некоторых реализациях способа перемещение в полосе движения характеризуется по меньшей мере одним из следующего: ускорение в полосе движения и замедление в полосе движения.
[0029] В некоторых реализациях способа алгоритм минимизации рывков в полосе движения формирует упомянутые по меньшей мере два возможных варианта наборов данных переходов состояния для SDV, причем упомянутые по меньшей мере два возможных варианта наборов данных переходов состояния для SDV представляются как профили скорости.
[0030] В некоторых реализациях способа профили скорости оптимизируются, чтобы минимизировать рывки в полосе движения.
[0031] В соответствии с другим широким аспектом настоящей технологии обеспечено электронное устройство. Электронное устройство содержит процессор; интерфейс связи для осуществления связи с датчиком, установленным на беспилотном транспортном средстве (SDV). Процессор выполнен с возможностью: получения начальных кинематических данных, ассоциированных с препятствием, которые указывают начальное состояние препятствия в начальный момент времени, при этом начальный момент времени находится раньше во времени, чем упомянутый предварительно определенный будущий момент времени; определения будущих кинематических данных, ассоциированных с упомянутым препятствием, которые указывают будущее состояние упомянутого препятствия в упомянутый предварительно определенный будущий момент времени; получения начальных кинематических данных, ассоциированных с SDV, которые указывают начальное состояние SDV в начальный момент времени; определения будущих кинематических данных, ассоциированных с SDV, которые указывают по меньшей мере два возможных варианта будущих состояний SDV в упомянутый предварительно определенный будущий момент времени, причем упомянутые по меньшей мере два возможных варианта будущих состояний SDV обеспечивают возможность SDV выполнять будущий маневр в упомянутый предварительно определенный будущий момент времени; определения по меньшей мере двух возможных вариантов наборов данных переходов состояния для перехода SDV из начального состояния SDV в соответствующий один из упомянутых по меньшей мере двух возможных вариантов будущих состояний SDV с использованием перемещения в полосе движения; определения оценочного показателя энергоэффективности для соответствующего одного из упомянутых по меньшей мере двух возможных вариантов наборов данных переходов состояния, причем данный оценочный показатель энергоэффективности указывает то, насколько топливоэффективным является переход между начальным состоянием и соответствующим возможным вариантом будущего состояния; и инициирования управления перемещением в полосе движения SDV на основе целевого набора данных переходов состояния из числа упомянутых по меньшей мере двух возможных вариантов наборов данных переходов состояния, при этом целевой набор данных переходов состояния представляет собой наиболее топливоэффективный набор данных переходов состояния из числа упомянутых по меньшей мере двух возможных вариантов наборов данных переходов состояния.
[0032] В некоторых реализациях электронного устройства процессор дополнительно выполнен с возможностью сравнения оценочных показателей энергоэффективности упомянутых по меньшей мере двух возможных вариантов наборов данных переходов состояния для определения целевого набора данных переходов состояния.
[0033] В некоторых реализациях электронного устройства процессор дополнительно выполнен с возможностью определения оценочного показателя соблюдения правил дорожного движения для соответствующего одного из упомянутых по меньшей мере двух возможных вариантов наборов данных переходов состояния. Данный оценочный показатель соблюдения правил дорожного движения указывает, соблюдает ли переход между начальным состоянием и соответствующим возможным вариантом будущего состояния правила дорожного движения упомянутого участка дороги. Целевой набор данных переходов состояния представляет собой наиболее топливоэффективный набор данных переходов состояния из числа упомянутых по меньшей мере двух возможных вариантов наборов данных переходов состояния, который обеспечивает возможность SDV соблюдать правила дорожного движения упомянутого участка дороги.
[0034] В некоторых реализациях электронного устройства процессор, выполненный с возможностью инициирования управления перемещением в полосе движения SDV на основе целевого набора данных переходов состояния, дополнительно выполнен с возможностью: инициирования управления по меньшей мере одним из ускорения в полосе движения и замедления в полосе движения SDV таким образом, что (i) фактические кинематические данные SDV во множестве промежуточных моментов времени совпадают (ii) с целевыми кинематическими данными из целевого набора данных переходов состояния во множестве промежуточных моментов времени.
[0035] В некоторых реализациях электронного устройства процессор, выполненный с возможностью определения по меньшей мере двух возможных вариантов наборов данных переходов состояния, дополнительно выполнен с возможностью выполнения алгоритма минимизации рывков в полосе движения. Данный возможный вариант набора данных переходов состояния для SDV задает наиболее эффективный с точки зрения рывков набор данных переходов состояния для перехода SDV из начального состояния SDV в соответствующий возможный вариант будущего состояния SDV только с использованием перемещения в полосе движения.
[0036] В некоторых реализациях электронного устройства процессор, с использованием алгоритма минимизации рывков в полосе движения, выполнен с возможностью формирования упомянутых по меньшей мере двух возможных вариантов наборов данных переходов состояния для SDV, причем упомянутые по меньшей мере два возможных варианта наборов данных переходов состояния для SDV представляются как профили скорости.
[0037] В контексте настоящего описания изобретения "сервер" представляет собой компьютерную программу, которая выполняется на соответствующих аппаратных средствах и выполнена с возможностью приема запросов (например, из клиентских устройств) по сети и выполнения этих запросов либо инструктирования выполнять эти запросы. Аппаратные средства могут реализовываться как один физический компьютер или одна физическая компьютерная система, но ни одно из означенного не должно обязательно иметь место относительно настоящей технологии. В настоящем контексте, использование выражения "сервер" не имеет намерение означать то, что каждая задача (например, принимаемые инструкции или запросы) или любая конкретная задача должна приниматься, выполняться или инструктироваться для выполнения посредством одного и того же сервера (т.е. одного и того же программного обеспечения и/или аппаратных средств); оно имеет намерение означать то, что любое число программных элементов или аппаратных устройств может быть предусмотрено при приеме/отправке, выполнении или инструктировании для выполнения любой задачи или запроса либо результатов любой задачи или запроса; и все это программное обеспечение и аппаратные средства могут представлять собой один сервер либо несколько серверов, причем все из означенного включается в выражение "по меньшей мере один сервер".
[0038] В контексте настоящего описания изобретения "электронное устройство" представляет собой любые компьютерные аппаратные средства, которые выполнены с возможностью выполнения программного обеспечения, соответствующего рассматриваемой релевантной задаче. В контексте настоящего описания изобретения, термин "электронное устройство" подразумевает, что устройство может функционировать в качестве сервера для других электронных устройств и клиентских устройств; тем не менее, это не должно обязательно иметь место относительно настоящей технологии. Таким образом, некоторые (неограничивающие) примеры электронных устройств включают в себя персональные компьютеры (настольные компьютеры, переносные компьютеры, нетбуки и т.д.), смартфоны и планшеты, а также сетевое оборудование, такое как маршрутизаторы, коммутаторы и шлюзы. Следует понимать, что в настоящем контексте тот факт, что устройство функционирует в качестве электронного устройства, не означает того, что оно не может функционировать в качестве сервера для других электронных устройств. Использование выражения "электронное устройство" не исключает использование нескольких клиентских устройств при приеме/отправке, выполнении или инструктировании для выполнения любой задачи или запроса либо результатов любой задачи или запроса, или этапов любого способа, описанного в данном документе.
[0039] В контексте настоящего описания изобретения "клиентское устройство" представляет собой любые компьютерные аппаратные средства, которые выполнены с возможностью выполнения программного обеспечения, соответствующего рассматриваемой релевантной задаче. В контексте настоящего описания изобретения, в общем термин "клиентское устройство" ассоциирован с пользователем клиентского устройства. Таким образом, некоторые (неограничивающие) примеры клиентских устройств включают в себя персональные компьютеры (настольные компьютеры, переносные компьютеры, нетбуки и т.д.), смартфоны и планшеты, а также сетевое оборудование, такое как маршрутизаторы, коммутаторы и шлюзы. Следует отметить, что устройство, выступающее в качестве клиентского устройства в настоящем контексте, не исключается из выступания в качестве сервера для других клиентских устройств. Использование выражения "клиентское устройство" не исключает использование нескольких клиентских устройств при приеме/отправке, выполнении или инструктировании для выполнения любой задачи или запроса либо результатов любой задачи или запроса, или этапов любого способа, описанного в данном документе.
[0040] В контексте настоящего описания изобретения выражение "информация" включает в себя информацию вообще любого характера или вида, выполненную с возможностью сохранения в базе данных. Таким образом, информация включает в себя, но не только, аудиовизуальные произведения (изображения, фильмы, звукозаписи, презентации и т.д.), данные (данные местоположения, числовые данные и т.д.), текст (мнения, комментарии, вопросы, сообщения и т.д.), документы, электронные таблицы и т.д.
[0041] В контексте настоящего описания изобретения выражение "программный компонент" имеет намерение включать в себя программное обеспечение (соответствующее конкретному аппаратному контексту), которое является необходимым и достаточным для того, чтобы осуществлять конкретную упоминаемую функцию(и).
[0042] В контексте настоящего описания изобретения выражение "компьютерные носители хранения информации" (также называемые "носителями хранения данных") имеет намерение включать в себя носители вообще любого характера и вида, в том числе, без ограничения, RAM, ROM, диски (CD-ROM, DVD, гибкие диски, накопители на жестких дисках и т.д.), флэш-накопители, полупроводниковые накопители, накопители на ленте и т.д. Множество компонентов могут комбинироваться, чтобы формировать компьютерные носители хранения информации, включающие в себя два или более компонентов носителей одинакового типа и/или два или более компонентов носителей различных типов.
[0043] В контексте настоящего описания изобретения "база данных" представляет собой любую структурированную совокупность данных, независимо от ее конкретной структуры, программного обеспечения управления базами данных или компьютерных аппаратных средств, на которых данные сохраняются, реализуются или становятся доступными иными способами для использования. База данных может постоянно размещаться в одних и тех же аппаратных средствах с процессом, который сохраняет или использует информацию, сохраненную в базе данных, либо она может постоянно размещаться в отдельных аппаратных средствах, таких как выделенный сервер или множество серверов.
[0044] В контексте настоящего описания изобретения слова "первый", "второй", "третий" и т.д. использованы в качестве характеристик только для целей обеспечения различения существительных, которые они модифицируют, друг от друга, а не для целей описания конкретных взаимосвязей между этими существительными. Таким образом, например, следует понимать, что использование терминов "первая база данных" и "третий сервер" не имеет намерение подразумевать конкретный порядок, тип, хронологию, иерархию или ранжирование (например) относительно сервера, и их использование не имеет намерение (непосредственно) подразумевать то, что "второй сервер" должен обязательно существовать в любой данной ситуации. Дополнительно, как пояснено в данном документе в других контекстах, ссылка на "первый" элемент и "второй" элемент не исключает того, что два элемента представляют собой фактически один и тот же элемент реального мира. Таким образом, например, в некоторых случаях, "первый" сервер и "второй" сервер могут представлять собой одни и те же программные и/или аппаратные компоненты, в других случаях они могут представлять собой различные программные и/или аппаратные компоненты.
[0045] Реализации настоящей технологии имеют по меньшей мере одну из вышеуказанных целей и/или аспектов, но не обязательно имеют все из них. Следует понимать, что некоторые аспекты настоящей технологии, которые получены в результате попытки достигать вышеуказанной цели, могут не удовлетворять этой цели и/или могут удовлетворять другим целям, не изложенным конкретно в данном документе.
[0046] Дополнительные и/или альтернативные признаки, аспекты и преимущества реализаций настоящей технологии должны становиться очевидными из нижеприведенного описания, прилагаемых чертежей и прилагаемой формулы изобретения.
Краткое описание чертежей
[0047] Эти и другие признаки, аспекты и преимущества настоящей технологии должны становиться более понятными при рассмотрении нижеприведенного описания, прилагаемой формулы изобретения и прилагаемых чертежей, на которых:
[0048] Фиг. 1 иллюстрирует принципиальную схему примерной компьютерной системы для реализации конкретных вариантов осуществления систем и/или способов настоящей технологии.
[0049] Фиг. 2 иллюстрирует сетевую вычислительную среду, подходящую для использования с некоторыми реализациями настоящей технологии.
[0050] Фиг. 3 иллюстрирует примерный сценарий для управления траекторией в полосе движения транспортного средства по фиг. 2 посредством процессора компьютерной системы по фиг. 1, согласно неограничивающим вариантам осуществления настоящей технологии.
[0051] Фиг. 4 иллюстрирует процесс для определения, посредством процессора компьютерной системы по фиг. 1, кинематических данных препятствия, ассоциированных с предварительно определенным моментом времени, согласно неограничивающим вариантам осуществления настоящей технологии.
[0052] Фиг. 5 иллюстрирует процесс для определения, посредством процессора компьютерной системы по фиг. 1, по меньшей мере двух возможных вариантов кинематических данных транспортного средства по фиг. 2, ассоциированных с предварительно определенным моментом времени, согласно неограничивающим вариантам осуществления настоящей технологии.
[0053] Фиг. 6 иллюстрирует процесс для определения возможных вариантов наборов данных переходов состояния для транспортного средства по фиг. 2 посредством процессора компьютерной системы по фиг. 1, согласно неограничивающим вариантам осуществления настоящей технологии.
[0054] Фиг. 7 иллюстрирует процесс для определения, посредством процессора компьютерной системы по фиг. 1, оценочного показателя энергоэффективности, ассоциированного с соответствующим возможным вариантом набора данных переходов состояния, согласно неограничивающим вариантам осуществления настоящей технологии.
[0055] Фиг. 8 иллюстрирует процесс для определения, посредством процессора компьютерной системы по фиг. 1, оценочного показателя соблюдения правил дорожного движения, ассоциированного с соответствующим возможным вариантом набора данных переходов состояния, согласно неограничивающим вариантам осуществления настоящей технологии.
[0056] Фиг. 9 иллюстрирует блок-схему последовательности операций способа для управления перемещением в полосе движения транспортного средства по фиг. 2, согласно неограничивающим вариантам осуществления настоящей технологии.
Подробное описание изобретения
[0057] Примеры и условный язык, изложенный в данном документе, преимущественно имеют намерение помогать читателю в понимании принципов настоящей технологии, а не ограничивать ее объем такими конкретно изложенными примерами и условиями. Следует принимать во внимание, что специалисты в данной области техники могут разрабатывать различные компоновки, которые, хотя и не описаны или показаны явно в данном документе, тем не менее, осуществляют принципы настоящей технологии и включаются в пределы ее сущности и объема.
[0058] Кроме того, в качестве помощи в понимании, нижеприведенное описание может описывать относительно упрощенные реализации настоящей технологии. Специалисты в данной области техники должны понимать, что различные реализации настоящей технологии могут иметь большую сложность.
[0059] В некоторых случаях также может быть изложено то, что считается полезными примерами модификаций настоящей технологии. Это осуществляется просто в качестве помощи в понимании и, кроме того, не должно не задавать объем или излагать ограничения настоящей технологии. Эти модификации не представляют собой исчерпывающий список, и специалисты в данной области техники могут вносить другие модификации, в то же время оставаясь в пределах объема настоящей технологии. Дополнительно, если примеры модификаций не изложены, не следует интерпретировать это таким образом, что модификации невозможны, и/или таким образом, что то, что описывается, представляет собой единственный способ реализации этого элемента настоящей технологии.
[0060] Кроме того, все утверждения в данном документе, излагающие принципы, аспекты и реализации технологии, а также их конкретные примеры, имеют намерение охватывать их конструктивные и функциональные эквиваленты независимо от того, являются они известными в настоящее время или разрабатываются в будущем. Таким образом, например, специалисты в данной области техники должны понимать, что блок-схемы в данном документе представляют концептуальные виды иллюстративной схемы, осуществляющей принципы настоящей технологии. Аналогично, следует принимать во внимание, что все блок-схемы последовательности операций, блок-схемы, схемы переходов состояния, псевдокод и т.п. представляют различные процессы, которые могут представляться большей частью на машиночитаемых носителях, и в силу этого выполняются посредством компьютера или процессора, независимо от того, показан или нет в явной форме такой компьютер или процессор.
[0061] Функции различных элементов, показанных на чертежах, включающих в себя все функциональные блоки, помеченные как "процессор", могут обеспечиваться с помощью специализированных аппаратных средств, а также аппаратных средств, выполненных с возможностью выполнения программного обеспечения, в ассоциации с надлежащим программным обеспечением. При обеспечении посредством процессора функции могут обеспечиваться посредством одного специализированного процессора, посредством одного совместно используемого процессора или посредством множества отдельных процессоров, некоторые из которых могут совместно использоваться. Кроме того, явное использование термина "процессор" или "контроллер" не должно истолковываться как означающее исключительно аппаратные средства, выполненные с возможностью выполнения программного обеспечения, и может неявно включать в себя, без ограничений, аппаратные средства процессора цифровых сигналов (DSP), сетевой процессор, специализированную интегральную схему (ASIC), программируемую пользователем вентильную матрицу (FPGA), постоянное запоминающее устройство (ROM) для сохранения программного обеспечения, оперативное запоминающее устройство (RAM) и энергонезависимое устройство хранения. Также могут быть включены другие аппаратные средства, традиционные и/или специализированные.
[0062] Программные модули или просто модули, которые подразумеваются как программные, могут представляться в данном документе в качестве любой комбинации элементов блок-схемы последовательности операций способа или других элементов, указывающих выполнение этапов процесса, и/или текстового описания. Такие модули могут выполняться посредством аппаратных средств, которые показаны явно или неявно.
[0063] С учетом этих основных принципов, далее рассматриваются некоторые неограничивающие примеры, чтобы иллюстрировать различные реализации аспектов настоящей технологии.
Компьютерная система
[0064] При обращении первоначально к фиг. 1, проиллюстрирована компьютерная система 100, подходящая для использования с некоторыми реализациями настоящей технологии, причем компьютерная система 100 содержит различные аппаратные компоненты, включающие в себя один или более одно- или многоядерных процессоров, совместно представленных посредством процессора 110, полупроводниковый накопитель 120, запоминающее устройство 130, которое может представлять собой оперативное запоминающее устройство или любой другой тип запоминающего устройства. Связь между различными компонентами компьютерной системы 100 может осуществляться посредством одной или более внутренних и/или внешних шин (не показаны) (например, посредством PCI-шины, универсальной последовательной шины, шины по стандарту IEEE1394 Firewire, шины SCSI, шины Serial ATA и т.д.), с которыми электронно соединяются различные аппаратные компоненты. Согласно вариантам осуществления настоящей технологии, полупроводниковый накопитель 120 сохраняет программные инструкции, подходящие для загрузки в запоминающее устройство 130 и выполняемые посредством процессора 110 для определения присутствия объекта. Например, программные инструкции могут представлять собой часть управляющего приложения транспортного средства, выполняемого посредством процессора 110. Следует отметить, что компьютерная система 100 может иметь дополнительные и/или необязательные компоненты, такие как модуль 140 сетевой связи для связи, через сеть связи (например, сеть 240 связи, проиллюстрированную на фиг. 2), с другими электронными устройствами и/или серверами, модули локализации (не проиллюстрирован) и т.п.
Сетевая вычислительная среда
[0065] Фиг. 2 иллюстрирует сетевую вычислительную среду 200, подходящую для использования с некоторыми вариантами осуществления систем и/или способов настоящей технологии. Сетевая вычислительная среда 200 содержит электронное устройство 210, ассоциированное с транспортным средством 220 или ассоциированное с пользователем (не проиллюстрирован), который может управлять транспортным средством 220, сервер 235, поддерживающий связь с электронным устройством 210 через сеть 240 связи (например, через Интернет и т.п., как подробнее описано ниже). Необязательно, сетевая вычислительная среда 200 также может включать в себя GPS-спутник (не проиллюстрирован), передающий и/или принимающий GPS-сигнал в/из электронного устройства 210. Следует понимать, что настоящая технология не ограничена GPS и может использовать технологию позиционирования, отличную от GPS. Следует отметить, что GPS-спутник может вообще опускаться.
[0066] Транспортное средство 220, с которым ассоциировано электронное устройство 210, может содержать любое туристическое или перевозное транспортное средство, такое как личный или коммерческий автомобиль, грузовик, мотоцикл и т.п. Транспортное средство может представлять собой управляемое пользователем или транспортное средство без водителя. Следует отметить, что конкретные параметры транспортного средства 220 не являются ограничивающими, причем эти конкретные параметры включают в себя: производителя транспортных средств, модель транспортного средства, год изготовления транспортного средства, вес транспортного средства, габариты транспортного средства, распределение веса транспортного средства, площадь поверхности транспортного средства, высоту транспортного средства, тип приводной передачи (например, 2x или 4x), тип шин, тормозную систему, топливную систему, пробег, идентификационный номер транспортного средства и рабочий объем двигателя.
[0067] Реализация электронного устройства 210 не ограничена конкретным образом, но в качестве примера, электронное устройство 210 может реализовываться как блок управления двигателем транспортного средства, CPU транспортного средства, навигационное устройство транспортного средства (например, TomTomTM, GarminTM), планшетный компьютер и персональный компьютер, встроенный в транспортное средство 220 и т.п. Таким образом, следует отметить, что электронное устройство 210 может быть или не быть постоянно ассоциировано с транспортным средством 220. Дополнительно или альтернативно, электронное устройство 210 может реализовываться в устройстве беспроводной связи, таком как мобильный телефон (например, смартфон или радиотелефон). В конкретных вариантах осуществления, электронное устройство 210 имеет дисплей 270.
[0068] Электронное устройство 210 может содержать часть или все компоненты компьютерной системы 100, проиллюстрированной на фиг. 1. В конкретных вариантах осуществления, электронное устройство 210 представляет собой бортовое компьютерное устройство и содержит процессор 110, полупроводниковый накопитель 120 и запоминающее устройство 130. Другими словами, электронное устройство 210 содержит аппаратные средства и/или программное обеспечение, и/или микропрограммное обеспечение либо комбинацию вышеозначенного для определения траектории транспортного средства 220 в данном сегменте дороги с учетом препятствий, как подробнее описано ниже.
Система датчиков
В неограничивающих вариантах осуществления настоящей технологии электронное устройство 210 содержит или имеет доступ к системе 230 датчиков. Согласно этим вариантам осуществления, система 230 датчиков может содержать множество датчиков, обеспечивающих различные реализации настоящей технологии. Примеры множества датчиков включают в себя, но не только: камеры, лидарные датчики и радарные датчики и т.д. Система 230 датчиков функционально соединяется с процессором 110 для передачи такой захваченной информации в процессор 110 для ее обработки, как подробнее описано ниже.
[0069] Система 230 датчиков может устанавливаться в салоне, в верхнем участке ветрового стекла транспортного средства 220, но другие местоположения находятся в пределах объема настоящего раскрытия сущности, в том числе заднее окно, боковые окна, передний капот, крыша, решетка радиатора или передний бампер транспортного средства 220. В некоторых неограничивающих вариантах осуществления настоящей технологии система 230 датчиков может устанавливаться в выделенном корпусе (не проиллюстрирован), установленном на крыше транспортного средства 220.
[0070] Дополнительно пространственное размещение системы 230 датчиков может проектироваться с учетом ее конкретной технической конфигурации, конфигурации корпуса, погодных условий области, в которой должно использоваться транспортное средство 220 (таких как частый дождь, снег и другие пункты), и т.п.
[0071] В неограничивающих вариантах осуществления настоящей технологии система 230 датчиков может содержать датчик, выполненный с возможностью захвата изображения окружающей области 250. В этом отношении, система 230 датчиков может представлять собой камеру либо множество камер (не проиллюстрированы отдельно).
[0072] То, как камера реализуется, не ограничено конкретным образом. Например, в конкретных неограничивающих вариантах осуществления настоящей технологии камера может реализовываться как монокамера с разрешением, достаточным для того, чтобы обнаруживать объекты на предварительно определенных расстояниях приблизительно до 30 м (хотя камеры с другими разрешениями и дальностями находятся в пределах объема настоящего раскрытия сущности).
[0073] В некоторых вариантах осуществления настоящей технологии камера (либо одна или более камер, которые составляют реализацию системы 230 датчиков) выполнена с возможностью захвата предварительно определенного участка окружающей области 250 вокруг транспортного средства 220. В некоторых вариантах осуществления настоящей технологии, камера выполнена с возможностью захвата изображения (или последовательность изображений), которое представляет приблизительно 90 градусов окружающей области 250 вокруг транспортного средства 220, т.е. вдоль пути перемещения транспортного средства 220.
[0074] В других вариантах осуществления настоящей технологии камера выполнена с возможностью захвата изображения (или последовательность изображений), которое представляет приблизительно 180 градусов окружающей области 250 вокруг транспортного средства 220, т.е. вдоль пути перемещения транспортного средства 220. В еще дополнительных вариантах осуществления настоящей технологии камера выполнена с возможностью захвата изображения (или последовательность изображений), которое представляет приблизительно 360 градусов окружающей области 250 вокруг транспортного средства 220, т.е. вдоль пути перемещения транспортного средства 220 (другими словами, окружающую область полностью вокруг транспортного средства 220).
[0075] В конкретном неограничивающем примере камера может иметь тип, предлагаемый компанией FLIR Integrated Imaging Solutions Inc., 12051 Riverside Way, Ричмонд, BC, V6W 1K7, Канада. Следует четко понимать, что камера может реализовываться в любом другом подходящем оборудовании.
[0076] В неограничивающих вариантах осуществления настоящей технологии система 230 датчиков дополнительно может содержать лидарный прибор (не проиллюстрирован отдельно). Лидар подразумевает оптическое обнаружение и измерение дальности. Предполагается, что специалисты в данной области техники должны понимать функциональность лидарного прибора, но вкратце, передающее устройство (не проиллюстрировано) лидара испускает лазерный импульс, и световые частицы (фотоны) рассеиваются обратно в приемное устройство (не проиллюстрировано) лидарного прибора. Фотоны, которые возвращаются в приемное устройство, собираются с помощью телескопа и подсчитываются в зависимости от времени. Используя скорость света (~3×108 м/с) процессор 110 затем может вычислять то, насколько далеко перемещаются фотоны (при пролете туда и обратно). Фотоны могут рассеиваться от многих различных объектов, окружающих транспортное средство 220, таких как другие частицы (аэрозоли или молекулы) в атмосфере, другой автомобиль, стационарные объекты или потенциальные преграды перед транспортным средством 220.
[0077] В конкретном неограничивающем примере, лидарный прибор, содержащийся в системе 230 датчиков, может реализовываться как лидарный датчик, который может иметь тип, предлагаемый компанией Velodyne LiDAR, Inc. 5521 Hellyer Avenue, Сан-Хосе, CA 95138, США. Следует четко понимать, что лидарный прибор может реализовываться в любом другом подходящем оборудовании.
[0078] В некоторых вариантах осуществления настоящей технологии, лидарный прибор, содержащийся в системе 230 датчиков, может реализовываться как множество лидарных датчиков, к примеру, три, например, или любое другое подходящее число.
[0079] В неограничивающих вариантах осуществления настоящей технологии система 230 датчиков дополнительно может содержать (радарный) прибор на основе радиообнаружения и измерения дальности (не проиллюстрирован отдельно). Вкратце, радарный прибор представляет собой обнаруживающий прибор с использованием радиоволн, чтобы определять дальность, угол и/или скорость объектов. Радарный прибор включает в себя передающее устройство, формирующее электромагнитные волны, антенну, используемую для передачи и приема электромагнитных волн, приемное устройство и процессор для того, чтобы определять свойства обнаруженных объектов. В альтернативных вариантах осуществления настоящей технологии, могут быть предусмотрены отдельная антенна для приема волн и отдельная антенна для передачи волн. Процессор, используемый для определения свойств окружающих объектов, может представлять собой процессор 110.
[0080] В некоторых вариантах осуществления затем настоящей технологии радарный прибор, используемый в системе 230 датчиков, может содержать радарные датчики большой, средней и малой дальности действия. В качестве неограничивающего примера радарный датчик большой дальности действия может использоваться для адаптивной системы круиз-контроля, автоматического экстренного торможения и системы выдачи предупреждений относительно прямых столкновений, в то время как радарные датчики средней и малой дальности действия могут использоваться для помощи при парковке, оповещения относительно пересекающихся потоков движения, помощи на скрещении дорог и обнаружения на слепой стороне.
[0081] В конкретном неограничивающем примере радарный прибор, содержащийся в системе 230 датчиков, может иметь тип, предлагаемый Robert Bosch GmbH компании Robert-Bosch-Platz 1, 70839 Герлинген, Германия. Следует четко понимать, что радарный прибор может реализовываться в любом другом подходящем оборудовании.
[0082] В некоторых неограничивающих вариантах осуществления настоящей технологии система 230 датчиков может использоваться, посредством процессора 110, для калибровки изображения. Например, с использованием изображения, захваченного посредством камеры, и облака лидарных точек, захваченного посредством лидарного прибора, процессор 110 выполнен с возможностью идентификации данной области изображения как соответствующей данной области облака лидарных точек, захваченного посредством лидарного прибора. В других вариантах осуществления настоящей технологии система 230 датчиков калибруется таким образом, что для изображения, захваченного посредством камеры, облака лидарных точек, захваченного посредством лидарного прибора, и радарных данных, захваченных посредством радарного прибора, процессор 110 выполнен с возможностью идентификации данной области изображения как соответствующей данной области облака лидарных точек и радарным данным.
[0083] В неограничивающих вариантах осуществления настоящей технологии транспортное средство 220 дополнительно содержит или имеет доступ к другим датчикам (не проиллюстрированы отдельно). Другие датчики включают в себя одно или более из следующего: блок инерциальных измерений (IMU), прибор на основе глобальной навигационной спутниковой системы (GNSS), радары скорости относительно земли, ультразвуковые сонарные датчики, одометрические датчики, включающие в себя акселерометры и гироскопы, механические датчики наклона, магнитный компас и другие датчики, обеспечивающие работу транспортного средства 220.
[0084] В качестве неограничивающего примера IMU может прикрепляться к транспортному средству 220 и содержать три гироскопа и три акселерометра для обеспечения данных по вращательному движению и прямолинейному движению транспортного средства 220, которые могут использоваться для того, чтобы вычислять движение и позицию транспортного средства 220.
Сеть связи
[0085] В некоторых вариантах осуществления настоящей технологии сеть 240 связи представляет собой Интернет. В альтернативных неограничивающих вариантах осуществления сеть 240 связи может реализовываться как любая подходящая локальная вычислительная сеть (LAN), глобальная вычислительная сеть (WAN), частная сеть связи и т.п. Следует четко понимать, что реализации сети 240 связи предназначаются только для целей иллюстрации. То, как реализуется линия связи (без отдельной ссылки с номером) между электронным устройством 210 и сетью 240 связи, должно зависеть, в числе прочего, от того, как реализуется электронное устройство 210. Просто в качестве примера, а не в качестве ограничения, в неограничивающих вариантах осуществления настоящей технологии, в которых электронное устройство 210 реализуется как устройство беспроводной связи, такое как смартфон или навигационное устройство, линия связи может реализовываться как линия беспроводной связи. Примеры линий беспроводной связи включают в себя, но не только, сетевую 3G-линию связи, сетевую 4G-линию связи и т.п. Сеть 240 связи также может использовать беспроводное соединение с сервером 235.
Сервер
[0086] В некоторых вариантах осуществления настоящей технологии сервер 235 реализуется как традиционный компьютер-сервер и может содержать часть или все компоненты компьютерной системы 100 по фиг. 1. В одном неограничивающем примере сервер 235 реализуется как сервер Dell™ PowerEdge™ под управлением операционной системы Windows Server™ Microsoft™, но также может реализовываться в любых других подходящих аппаратных средствах, программном обеспечении и/или микропрограммном обеспечении либо в комбинации вышеозначенного. В проиллюстрированных неограничивающих вариантах осуществления настоящей технологии сервер представляет собой один сервер. В альтернативных неограничивающих вариантах осуществления настоящей технологии (не показаны) функциональность сервера 235 может распределяться и может реализовываться через несколько серверов.
[0087] В некоторых неограничивающих вариантах осуществления настоящей технологии процессор 110 электронного устройства 210 может поддерживать связь с сервером 235, чтобы принимать одно или более обновлений. Обновления могут представлять собой, но не только, обновления программного обеспечения, обновления карт, обновления маршрутов, обновления прогноза погоды и т.п. В некоторых вариантах осуществления настоящей технологии, процессор 110 также может быть выполнен с возможностью передачи в сервер 235 определенных рабочих данных, таких как проезжаемые маршруты, данные трафика, данные рабочих характеристик и т.п. Некоторые или все данные, передаваемые между транспортным средством 220 и сервером 235, могут шифроваться и/или анонимизироваться.
[0088] В некоторых вариантах осуществления настоящей технологии сервер 235 может иметь доступ (локально и/или удаленно) к информации, ассоциированной с дорожной картой. Вообще говоря, дорожная карта представляет собой карту дорог, которые расположены в городе, административном районе и/или других географических областях. Например, секция дорожной карты может включать в себя такую информацию, как, но не только: присутствие дорог в этой секции, числе полос движения на этих дорогах, присутствии перекрестков, присутствие светофоров, присутствие пешеходных переходов, плату за проезд, взимаемую для использования участка дороги, и т.п.
[0089] В других вариантах осуществления настоящей технологии сервер 235 может иметь доступ (локально и/или удаленно) к информации, указывающей правила дорожного движения, ассоциированные с дорожной картой. Вообще говоря, правила дорожного движения представляют законодательство в сфере дорожного движения, которое определяется посредством органа, обладающего соответствующей юрисдикцией, и которое является применимым, по меньшей мере, на некоторых участках дорожной карты. Например, правила дорожного движения, ассоциированные с данной секцией дорожной карты, представляют законодательство в сфере дорожного движения, которое является применимым на этой данной секции дорожной карты, такое как, но не только: предварительно определенное направление потока трафика каждой полосы движения в секции дорожной карты, присутствие конкретных дорожных знаков, регулирующих трафик в этой секции дорожной карты, включающих в себя знаки "стоп", знаки "уступи дорогу", дорожные информационные указатели и табло, ограничения скорости (например, максимальную разрешенную скорость, ассоциированную с участком дороги, минимальную разрешенную скорость, ассоциированную с участком дороги), индикаторы других законов или правил в сфере дорожного движения и т.п.
[0090] Предполагается, что сервер 235 может быть выполнен с возможностью обеспечения для процессора 110 (например, процессора 110 электронного устройства 210) доступа к информации, указывающей (i) секцию дорожной карты, соответствующую окрестности транспортного средства 220, и (ii) правила дорожного движения, ассоциированные с этой секцией дорожной карты.
[0091] С этой целью, в некоторых неограничивающих вариантах осуществления настоящей технологии сервер 235 может принимать запрос, отправленный посредством электронного устройства 210 для предоставления доступа к информации, указывающей секцию дорожной карты (соответствующей окрестности транспортного средства 220) и надлежащим образом ассоциированные правила дорожного движения. Например, запрос, отправленный посредством электронного устройства 210, может включать в себя информацию, указывающую позицию транспортного средства (например, выражаемую в глобальных геокоординатах) транспортного средства 220. Как результат, сервер 235 может обеспечивать электронному устройству 210 доступ к информации (или обеспечивать саму информацию), указывающей секцию дорожной карты, которая включает в себя позицию транспортного средства для транспортного средства 220 и надлежащим образом ассоциированные правила дорожного движения.
[0092] Ниже в данном документе подробнее описывается то, как электронное устройство 210 использует информацию, указывающую секцию дорожной карты, соответствующую окрестности транспортного средства 220, и правила дорожного движения, ассоциированные с этой секцией дорожной карты.
[0093] Следует отметить, что электронное устройство 210 может быть выполнено с возможностью получения доступа к информации (или получения непосредственно информации), указывающей секцию дорожной карты, соответствующую окрестности транспортного средства 220, и надлежащим образом ассоциированных правил дорожного движения, не через сервер 235. Например, информация, указывающая дорожную карту и правила дорожного движения, может предварительно загружаться и предварительно сохраняться посредством электронного устройства 210.
Процессор
[0094] Как упомянуто выше, процессор 110 (такой как, например, процессор 110 электронного устройства 210) выполнен с возможностью, в числе прочего, обработки (i) информации, которая обеспечивается в него посредством системы 230 датчиков, (ii) информацию, которая указывает секцию дорожной карты, соответствующую окрестности транспортного средства 220, и (iii) информацию, которая указывает правила дорожного движения, ассоциированные с этой секцией дорожной карты, для целей принятия решений (к примеру, для формирования маневров и других траекторий для транспортного средства 220) и/или для работы (к примеру, для инструктирования транспортному средству 220 выполнять такие маневры и другие траектории) транспортного средства 220.
[0095] В соответствии с неограничивающими вариантами осуществления настоящей технологии по меньшей мере, частично на основе вышеприведенных данных, процессор 110 может быть выполнен с возможностью управления перемещением в полосе движения транспортного средства 220, выполняющего маневр относительно по меньшей мере одного препятствия таким образом, что транспортное средство 220 едет по более энергоэффективной траектории. Другими словами, процессор 110 может быть выполнен с возможностью планирования траектории транспортного средства 220, которое выполняет маневр, с учетом расхода топлива транспортного средства 220.
[0096] Далее описывается то, как процессор 110 выполнен с возможностью определения более энергоэффективной траектории, со ссылкой на фиг. 3-8.
[0097] При обращении первоначально к фиг. 3, проиллюстрирован пример дорожного сценария для управления перемещением в полосе движения транспортного средства 220, в соответствии с неограничивающими вариантами осуществления настоящей технологии.
[0098] В вариантах осуществления по фиг. 3 транспортное средство 220 движется по полосе движения. Окрестность транспортного средства 220 проиллюстрирована посредством секции 340 дорожной карты. В предварительно определенный будущий момент времени транспортное средство 220 может инструктироваться, посредством процессора 110, выполнять будущий маневр. В неограничивающих вариантах осуществления настоящей технологии будущий маневр может представлять собой смену полосы движения с полосы движения, первоначально ассоциированной с транспортным средством, на одну из соседних полос движения. Тем не менее, одна из соседних полос движения, в которые направляется транспортное средство 220, может включать в себя по меньшей мере одно препятствие, что вызывает риск столкновений для транспортного средства 220.
[0099] В вариантах осуществления по фиг. 3 по меньшей мере одно препятствие представляет собой подвижное препятствие, такое как препятствие 302, которое включает в себя другое транспортное средство, велосипедиста и т.п. В неограничивающих вариантах осуществления настоящей технологии по меньшей мере одно препятствие также может включать в себя неподвижное препятствие, такое как разделительная полоса с перегородкой, светофор, припаркованное транспортное средство и т.п.
[0100] С этой целью процессор 110 может быть выполнен с возможностью инструктирования транспортного средства 220 перемещаться, во-первых, продольно, т.е. вдоль полосы движения, первоначально ассоциированной с транспортным средством 220 (также упоминается в данном документе в качестве "перемещения в полосе движения") и, во-вторых, поперечно. В варианте осуществления по фиг. 3 поперечное перемещение транспортного средства 220 должно представлять собой поворот налево. Момент времени, когда процессор 110 начинает инструктировать транспортное средство 220 перемещаться в полосе движения, что представляет собой часть выполнения смены полосы движения, упоминается в данном документе как начальный момент t0 времени. Транспортное средство 220 и его окрестность в начальный момент t0 времени проиллюстрированы посредством визуального представления 300 секции 340 дорожной карты. Момент времени, когда процессор 110 инструктирует транспортное средство 220 переключаться с перемещения в полосе движения в поперечное перемещение, упоминается в данном документе как целевой момент tT времени.
[0101] В неограничивающих вариантах осуществления настоящей технологии процессор 110 может обеспечивать транспортное средство 220 по меньшей мере двумя вариантами траектории в полосе движения (т.е. траекторию, по которой транспортное средство 220 перемещается перед поперечным перемещением от начального момента t0 времени до целевого момента tT времени): (1) ускорение транспортного средства 220 таким образом, что транспортное средство 220 находится впереди препятствия 302 на расстоянии, не меньшем первого запаса по безопасности (не проиллюстрирован отдельно), что проиллюстрировано посредством визуального представления 310 секции 340 дорожной карты; или (2) замедление транспортного средства 220 таким образом, что транспортное средство 220 находится перед препятствием 302 на расстоянии, не меньшем второго запаса по безопасности (не проиллюстрирован отдельно), что проиллюстрировано посредством визуального представления 320 секции 340 дорожной карты. Процессор 110 может выбирать первый запас по безопасности и второй запас по безопасности таким образом, что транспортное средство 220, от целевого момента tT времени до завершения смены полосы движения, должно избегать столкновений с препятствием 302.
[0102] Другими словами, первый и второй запасы по безопасности выбираются посредством процессора 110 таким образом, что транспортное средство 220, в целевой момент tT времени не имеет препятствия 302, что обеспечивает возможность безопасного завершения смены полосы движения. С этой целью визуальные представления 310 и 320 иллюстрируют возможные варианты состояний транспортного средства 220, которые соответствуют надлежащим окнам возможности для транспортного средства 220 выполнять смену полосы движения в целевой момент tT времени. Ниже подробнее описывается то, как процессор 110 выполнен с возможностью выбора одного возможного варианта состояния транспортного средства 220 по сравнению с другим.
[0103] В неограничивающих вариантах осуществления настоящей технологии процессор 110 может быть выполнен с возможностью определения кинематических данных, ассоциированных с транспортным средством 220 и препятствием 302 в начальный момент t0 времени и в целевой момент tT времени. Процессор 110 может быть выполнен с возможностью выбора начального момента t0 времени и целевого момента tT времени на основе предварительно определенного временного интервала.
[0104] В неограничивающих вариантах осуществления настоящей технологии кинематические данные содержат, по меньшей мере, (1) значение координаты вдоль оси 332, x; (2) значение мгновенной скорости в полосе движения, v; и (3) значение мгновенного ускорения/замедления в полосе движения, a.
[0105] Таким образом, каждое из визуальных представлений 300, 310 и 320, в общем, иллюстрирует секцию 340 дорожной карты, имеющую (1) две полосы движения (протягивающиеся слева направо в ориентации по фиг. 3) и (2) препятствие 302. Только в качестве иллюстрации, предположим, что как транспортное средство 220, так и препятствие 302 движутся в направлении трафика, указываемом посредством стрелок 312. Дополнительно транспортное средство 220 и препятствие 302 движутся в соответствующих соседних полосах движения. Дополнительно следует отметить, что визуальные представления 300, 310 и 320 проиллюстрированы только для целей иллюстрации сценария, и в силу этого процессор 110 фактически не отображает визуальные представления 300, 310 и 320.
[0106] Из фиг. 3 можно принимать во внимание, что визуальные представления 300, 310 и 320 также включают в себя представления, по меньшей мере, некоторых правил дорожного движения, ассоциированных с секцией 340 дорожной карты. Например, по меньшей мере, некоторые правила дорожного движения могут предписывать направления трафика, которые должны соблюдать движущиеся транспортные средства и которые проиллюстрированы посредством стрелок 312. В другом примере, по меньшей мере, некоторые правила дорожного движения дополнительно могут запрещать движущимся транспортным средствам смену полосы движения, что проиллюстрирована посредством визуального представления 322. Тем не менее, следует отметить, что визуальные представления 312 и 322 проиллюстрированы только для целей иллюстрации примерного сценария, и в силу этого процессор 110 не должен фактически отображать визуальные представления 312 и 322.
[0107] В завершение, каждое из визуальных представлений 300, 310 и 320 также иллюстрирует координатную ось 332 координат, протягивающуюся слева направо (в ориентации по фиг. 3) и совпадающую с направлением трафика в секции 340 дорожной карты. Координатная ось 332 выступает исключительно в качестве помощи в понимании неограничивающих вариантов осуществления настоящей технологии и в силу этого не должна обязательно отображаться посредством процессора 110.
[0108] Смена полосы движения в силу этого отличается посредством начального момента t0 времени, соответствующего начальному состоянию транспортного средства 220 и препятствия 302, и целевого момента tT времени. В целевой момент tT времени, препятствие 302 ассоциировано с целевым состоянием препятствия, и транспортное средство 220 ассоциировано, по меньшей мере, с двумя возможными вариантами целевых состояний (проиллюстрированы в визуальных представлениях 310 и 320, соответственно).
[0109] В связи с этим, визуальное представление 300 иллюстрирует начальное состояние секции 340 дорожной карты в начальный момент времени t0, при этом время t0 является временем, когда транспортное средство 220 начинает смену полосы движения. Начальное состояние секции 340 дорожной карты включает в себя:
(1) начальное состояние транспортного средства 220, характеризующееся начальными кинематическими данными 304 транспортного средства (xv@t0; vv@t0; av@t0), при этом:
- xv@t0 является значением координаты транспортного средства 220 в начальный момент t0 времени вдоль оси 332;
- vv@t0 является значением мгновенной скорости транспортного средства 220 в начальный момент t0 времени; и
- av@t0 является значением мгновенного ускорения транспортного средства 220 в начальный момент t0 времени;
и (2) начальное состояние препятствия 302, характеризующееся начальными кинематическими данными 306 препятствия (xobs@t0; vobs@t0; aobs@t0), при этом:
- xobs@t0 является значением координаты препятствия 302 в начальный момент t0 времени вдоль оси 332;
- vobs@t0 является значением мгновенной скорости препятствия 302 в начальный момент t0 времени; и
- aobs@t0 является значением мгновенного ускорения препятствия 302 в начальный момент t0 времени.
[0110] В неограничивающих вариантах осуществления настоящей технологии процессор 110 может быть выполнен с возможностью определения более энергоэффективной траектории для транспортного средства 220, которое собирается выполнять смену полосы движения, в качестве наиболее энергоэффективного перехода в полосе движения между начальным состоянием транспортного средства 220 и одним из упомянутых по меньшей мере двух возможных вариантов целевых состояний транспортного средства 220.
[0111] С этой целью, сначала, процессор 110, во время t0, выполнен с возможностью получения индикатора начальных кинематических данных 304 транспортного средства (с использованием или системы 230 датчиков и/или на основе процессора 110, имеющего доступ к различным компонентам и системам транспортного средства 220) и индикатора начальных кинематических данных 306 препятствия (с использованием системы 230 датчиков).
[0112] Как упомянуто выше, визуальные представления 310 и 320 соответствуют по меньшей мере двум вероятным возможным вариантам состояний секции 340 дорожной карты в целевой момент времени tT, таким как первый возможный вариант состояния и второй возможный вариант состояния, соответственно. Визуальное представление 310, иллюстрирующее первый возможный вариант состояния секции 340 дорожной карты, включает в себя: (1) первый возможный вариант целевого состояния транспортного средства 220, характеризующийся первым возможным вариантом 314 кинематических данных (xv1@tT; vv1@tT; av1@tT), при этом:
- xv1@tT является значением координаты транспортного средства 220 в целевой момент tT времени вдоль оси 332, соответствующей первому возможному варианту целевого состояния транспортного средства 220;
- vv1@tT является значением мгновенной скорости транспортного средства 220 в целевой момент tT времени, соответствующим первому возможному варианту целевого состояния транспортного средства 220; и
- av1@tT является значением мгновенного ускорения транспортного средства 220 в целевой момент tT времени, соответствующим первому возможному варианту целевого состояния транспортного средства 220;
и (2) целевое состояние препятствия 302, характеризующееся целевыми кинематическими данными 316 препятствия (xobs@tT; vobs@tT; aobs@tT), при этом:
- xv1@tT является значением координаты препятствия 302 в целевой момент tT времени вдоль оси 332, соответствующим целевому состоянию препятствия;
- vv1@tT является значением мгновенной скорости препятствия 302 в целевой момент tT времени, соответствующим целевому состоянию препятствия; и
- av1@tT является значением мгновенного ускорения препятствия 302 в целевой момент tT времени, соответствующим целевому состоянию препятствия.
[0113] Визуальное представление 320, иллюстрирующее второй возможный вариант состояния секции 340 дорожной карты, включает в себя: (1) второй возможный вариант целевого состояния транспортного средства 220, характеризующийся вторым возможным вариантом 324 кинематических данных (xv2@tT; vv2@tT; av2@tT), при этом:
- xv1@tT является значением координаты транспортного средства 220 в целевой момент tT времени вдоль оси 332, соответствующим второму возможному варианту целевого состояния транспортного средства 220;
- vv1@tT является значением мгновенной скорости транспортного средства 220 в целевой момент tT времени, соответствующим второму возможному варианту целевого состояния транспортного средства 220; и
- av1@tT является значением мгновенного ускорения транспортного средства 220 в целевой момент tT времени, соответствующим второму возможному варианту целевого состояния транспортного средства 220;
и (2) целевое состояние препятствия 302, характеризующееся целевыми кинематическими данными 316 препятствия (xobs@tT; vobs@tT; aobs@tT).
[0114] Согласно неограничивающим вариантам осуществления настоящей технологии, чтобы определять наиболее энергоэффективный переход в полосе движения для транспортного средства 220, процессор 110 дополнительно может быть выполнен с возможностью определения целевых кинематических данных 316 препятствия, первый возможный вариант 314 кинематических данных и второй возможный вариант 324 кинематических данных на основе их начальных кинематических данных.
[0115] Со ссылкой на фиг. 4 схематично проиллюстрирован процесс для определения целевых кинематических данных 316 препятствия, согласно неограничивающим вариантам осуществления настоящей технологии.
[0116] В этом отношении, процессор 110 может иметь доступ к модели 400 оценки кинематических данных.
[0117] Вообще говоря, модель 400 оценки кинематических данных представляет комбинацию кинематических математических моделей, выполненных для формирования кинематических данных препятствия 302 для предварительно определенного будущего момента времени на основе их начальных кинематических данных. Неограничивающие примеры модели 400 оценки кинематических данных могут включать в себя (i) график смещения препятствия 302 в секции 340 дорожной карты; (ii) систему кинематических уравнений времени, описывающих кинематическое перемещение препятствия 302 в секции 340 дорожной карты; и (iii) систему динамических уравнений времени, описывающих динамику (например, силовые факторы, оказывающие влияние на препятствие 302, такие как боковой воздушный поток) препятствия 302 в секции 340 дорожной карты.
[0118] Соответственно, чтобы формировать целевые кинематические данные 316 препятствия для препятствия 302 (xobs@tT; vobs@tT; aobs@tT), процессор 110 выполнен с возможностью подачи начальных кинематических данных 306 препятствия (xobs@t0; vobs@t0; aobs@t0) и индикатора целевого момента tT 402 времени в качестве вводов в модель 400 оценки кинематических данных.
[0119] Ссылаясь теперь на фиг. 5, схематично проиллюстрирован процесс для формирования первого возможного варианта 314 кинематических данных и второго возможного варианта 324 кинематических данных, согласно неограничивающим вариантам осуществления настоящей технологии.
[0120] В этом отношении, процессор 110 выполнен с возможностью доступа к возможному варианту 500 конечной модели оценки кинематических данных. Сродни модели 400 оценки кинематических данных, возможный вариант 500 конечной модели оценки кинематических данных включает в себя комбинацию кинематических математических моделей, выполненных для формирования возможных вариантов кинематических данных для транспортного средства 220 для предварительно определенного момента времени на основе их начальных кинематических данных и кинематических данных по меньшей мере одного препятствия в предварительно определенный момент времени.
[0121] Вообще говоря, возможный вариант 500 конечной модели оценки кинематических данных выполнен с возможностью формирования кинематических данных для транспортного средства 220, которое инструктируется посредством процессора 110, с возможностью выполнения смены полосы движения в предварительно определенный будущий момент времени, например, в целевой момент tT времени. Возможный вариант 500 конечной модели оценки кинематических данных дополнительно может быть выполнен с возможностью учета кинематических данных по меньшей мере одного препятствия в целевой момент tT времени. По меньшей мере одно препятствие может двигаться в полосе движения, соседней с полосой движения, в которой движется транспортное средство 220 и в которую должно переходить транспортное средство 220 в результате выполнения смены полосы движения, к примеру, препятствие 302, проиллюстрированное на фиг. 3. Таким образом, кинематические данные (такие как, например, значение координаты вдоль оси 332, значения скорости и показателя ускорения), сформированные посредством возможного варианта 500 конечной модели оценки кинематических данных обеспечивают возможность транспортному средству 220, в целевой момент tT времени, либо (1) переходить в первый возможный вариант состояния (проиллюстрирован как 310 на фиг. 3), который находится впереди препятствия 302 на расстоянии, не меньшем первого запаса по безопасности, либо (2) переходить во второй возможный вариант состояния (проиллюстрирован как 320 на фиг. 3), который находится перед препятствием 302 на расстоянии, не меньшем второго запаса по безопасности. Первый и второй запасы по безопасности предварительно определяются посредством процессора 110 таким образом, что транспортное средство 220 предотвращает столкновение с препятствием 302, за счет этого безопасно выполняя смену полосы движения. Другими словами, первый запас по безопасности и второй запас по безопасности соответствуют надлежащим окнам возможности для транспортного средства 220 выполнять смену полосы движения в целевой момент tT времени.
[0122] С этой целью, процессор 110 выполнен с возможностью подачи следующих входных данных в возможный вариант 500 конечной модели оценки кинематических данных: (1) индикатора целевого момента tT 402 времени; (2) начальных кинематических данных 304 транспортного средства (xv@t0; vv@t0; av@t0); и (3) целевых кинематических данных 316 препятствия (xobs@tT; vobs@tT; aobs@tT). Следовательно, возможный вариант 500 конечной модели оценки кинематических данных выводит первый возможный вариант 314 кинематических данных (xv1@tT; vv1@tT; av1@tT) и второй возможный вариант 324 кинематических данных (xv2@tT; vv2@tT; av2@tT), соответствующие первому возможному варианту состояния и второму возможному варианту состояния транспортного средства 220 в целевой момент tT времени, соответственно.
[0123] Хотя в вариантах осуществления, описанных в данном документе, рассматривается только одно препятствие, т.е. препятствие 302, число препятствий, которые возможный вариант 500 конечной модели оценки кинематических данных может учитывать для того, чтобы формировать возможные варианты кинематических данных для транспортного средства 220, не ограничено. Например, в вариантах осуществления по фиг. 3, может быть предусмотрено другое подвижное препятствие (не проиллюстрирован), движущееся позади препятствия 302 на некотором расстоянии. С этой целью, процессор 110 может быть выполнен с возможностью подачи, в возможный вариант 500 конечной модели оценки кинематических данных, помимо входных данных, упомянутых выше: (4) кинематических данных, ассоциированных с другим препятствием, определенным для целевого момента tT времени; (5) расстояния между препятствием 302 и другим препятствием. С учетом этого, возможный вариант 500 конечной модели оценки кинематических данных, например, может формировать возможные варианты кинематических данных для транспортного средства 220, обеспечивающие возможность транспортному средству 220, в целевой момент tT времени, либо (i) принимать первый возможный вариант состояния перед препятствием 302 на расстоянии, не меньшем первого запаса по безопасности; либо (ii) принимать второй возможный вариант состояния между препятствием 302 и другим препятствием таким образом, что транспортное средство 220 находится на расстоянии, не меньшем второго запаса по безопасности перед препятствием 302 и на расстоянии, не меньшем первого запаса по безопасности перед другим препятствием; либо, в завершение, (iii) принимать третий возможный вариант состояния перед другим препятствием на расстоянии, не меньшем второго запаса по безопасности. Соответственно, если процессор 110 определяет то, что расстояние между препятствием 302 и другим препятствием не обеспечивает возможность второго возможного варианта состояния транспортного средства 220, процессор 110 отбрасывает второй возможный вариант состояния.
[0124] В неограничивающих вариантах осуществления настоящей технологии, чтобы определять возможный вариант целевого состояния транспортного средства 220, ассоциированного с наиболее энергоэффективным переходом в полосе движения транспортного средства 220, процессор 110 может быть дополнительно выполнен с возможностью определения, на основе первого возможного варианта 314 кинематических данных и второго возможного варианта 324 кинематических данных, соответствующих возможных вариантов наборов данных переходов состояния, которые описываются ниже со ссылкой на фиг. 6.
[0125] Вообще говоря, данный возможный вариант набора данных переходов состояния, ассоциированный с транспортным средством 220, представляет структуру данных, включающую в себя, по меньшей мере, часть кинематических данных, ассоциированных с транспортным средством 220 во множестве промежуточных моментов ti времени (например, 100) между начальным моментом t0 времени и целевым моментом tT времени. То, как выбирается множество промежуточных моментов, не ограничено и может включать в себя, например, выбор множества промежуточных моментов на основе предварительно определенного значения шага. Процессор 110 может определять предварительно определенное значение шага, например, на основе значения начальной скорости транспортного средства для транспортного средства 220. Альтернативно, выбор множества промежуточных моментов ti времени может выполняться, посредством процессора 110, любым другим способом.
[0126] Согласно неограничивающим вариантам осуществления настоящей технологии процессор 110 может быть выполнен с возможностью формирования данного возможного варианта набора данных переходов состояния посредством использования алгоритма минимизации рывков.
[0127] Со ссылкой на фиг. 6, проиллюстрирован процесс для формирования, посредством процессора 110, возможных вариантов наборов данных переходов состояния с использованием алгоритма 600 минимизации рывков, согласно неограничивающим вариантам осуществления настоящей технологии.
[0128] Вообще говоря, алгоритм 600 минимизации рывков выполнен с возможностью формирования данного возможного варианта набора данных переходов состояния для транспортного средства 220. С этой целью данный возможный вариант набора данных переходов состояния указывает переход в полосе движения транспортного средства 220 из начального состояния в один из возможных вариантов состояний с минимизированным рывком в полосе движения.
[0129] В неограничивающих вариантах осуществления настоящей технологии рывок в полосе движения, ассоциированный с транспортным средством 220, означает скорость изменения ускорения/замедления, ассоциированную с транспортным средством 220 в продольном направлении, т.е. во время перемещения в полосе движения транспортного средства 220 и без учета рывка во время поперечного перемещения транспортного средства 220.
[0130] В качестве примера реализации алгоритма 600 минимизации рывков, алгоритм 600 минимизации рывков может быть основан на предварительно определенном пороговом значении ускорения/замедления в полосе движения транспортного средства 220 в каждый из множества промежуточных моментов ti времени данного возможного варианта набора данных переходов состояния. Альтернативно, согласно неограничивающим вариантам осуществления настоящей технологии, алгоритм 600 минимизации рывков дополнительно может быть основан на следующем, без ограничения:
- линейное изменение ускорения/замедления в полосе движения и квадратическое изменение скорости в полосе движения;
- нулевой рывок в полосе движения и линейное изменение скорости в полосе движения;
- нулевое ускорение в полосе движения и постоянная скорость в полосе движения.
[0131] В некоторых неограничивающих вариантах осуществления настоящей технологии алгоритм 600 минимизации рывков может быть выполнен с возможностью формирования данного возможного варианта набора данных переходов состояния в форме профиля скорости. С этой целью, данный профиль скорости представляет вектор значений мгновенной скорости транспортного средства 220, в котором каждое значение мгновенной скорости соответствует надлежащему одному из множества промежуточных моментов ti времени между начальным моментом t0 времени и целевым моментом tT времени.
[0132] Соответственно, посредством использования алгоритма 600 минимизации рывков, процессор 110 выполнен с возможностью формирования первого возможного варианта набора 614 данных переходов состояния и второго возможного варианта набора 624 данных переходов состояния на основе первого возможного варианта 314 кинематических данных (xv1@tT; vv1@tT; av1@tT), второго возможного варианта 324 кинематических данных (xv2@tT; vv2@tT; av2@tT), соответственно, и начальных кинематических данных 304 транспортного средства (xv@t0; vv@t0; av@t0). Первый возможный вариант набора 614 данных переходов состояния включает в себя, по меньшей мере, часть кинематических данных транспортного средства 220 (xi1@ti, vi1@ti, ai1@ti), определенных, на основе первого возможного варианта 314 кинематических данных, для каждого множества промежуточных моментов ti времени, при этом:
- xi1@ti является значением координаты транспортного средства 220 в одном из множества промежуточных моментов ti времени в качестве части первого возможного варианта набора 614 данных переходов состояния;
- vi1@ti является значением мгновенной скорости транспортного средства 220 в один из множества промежуточных моментов ti времени в качестве части первого возможного варианта набора 614 данных переходов состояния; и
- ai1@ti является значением мгновенного ускорения транспортного средства 220 в один из множества промежуточных моментов ti времени в качестве части первого возможного варианта набора 614 данных переходов состояния.
[0133] По меньшей мере, часть кинематических данных транспортного средства 220 в соответствующий один из множества промежуточных моментов ti времени оптимизируется, чтобы минимизировать рывок в полосе движения, ассоциированный с переходом транспортного средства 220 из начального состояния в первый возможный вариант состояния. Следовательно, этот переход представляет собой наиболее эффективный с точки зрения рывков переход в полосе движения транспортного средства 220 из начального состояния и первого возможного варианта целевого состояния. То же применимо с необходимыми изменениями ко второму возможному варианту набора 624 данных переходов состояния.
[0134] В неограничивающих вариантах осуществления настоящей технологии, чтобы определять наиболее энергоэффективный переход в полосе движения транспортного средства 220, процессор 110 дополнительно может быть выполнен с возможностью выбора одного из первого возможного варианта набора данных переходов состояния и второго возможного варианта набора данных переходов состояния. За счет этого, процессор 110 выполнен с возможностью определения целевого набора данных переходов состояния. Целевой набор данных переходов состояния задает наиболее энергоэффективный переход в полосе движения транспортного средства 220 из начального состояния в соответствующий возможный вариант целевого состояния.
[0135] В некоторых неограничивающих вариантах осуществления настоящей технологии процессор 110 может быть выполнен с возможностью определения целевого набора данных переходов состояния на основе оценочных показателей энергоэффективности, ассоциированных с соответствующими возможными вариантами наборов данных переходов состояния.
[0136] Со ссылкой теперь на фиг. 7 проиллюстрирован процесс для определения оценочных показателей энергоэффективности, ассоциированных с возможными вариантами наборов данных переходов состояния, определенными для транспортного средства 220, согласно неограничивающим вариантам осуществления настоящей технологии. С этой целью, процессор 110 может иметь доступ к модели 700 оценки энергоэффективности.
[0137] Вообще говоря, модель 700 оценки энергоэффективности выполнена с возможностью формирования оценочного показателя энергоэффективности для данного перехода транспортного средства 220 на основе соответствующего возможного варианта набора данных переходов состояния. В неограничивающих вариантах осуществления настоящей технологии, оценочный показатель энергоэффективности может указывать объем топлива, который требуется транспортному средству 220 для того, чтобы выполнять данный переход. С этой целью, модель 700 оценки энергоэффективности может представлять комбинацию уравнений времени, описывающих расход топлива посредством транспортного средства 220 относительно кинематических данных, ассоциированных с ним, из соответствующего возможного варианта набора данных переходов состояния.
[0138] Таким образом, процессор 110 может быть выполнен с возможностью определения: (1) на основе первого возможного варианта набора 614 данных переходов состояния, первого оценочного показателя 714 энергоэффективности; и (2) на основе второго возможного варианта набора 624 данных переходов состояния, второго оценочного показателя 724 энергоэффективности.
[0139] В неограничивающих вариантах осуществления настоящей технологии, чтобы выбирать один из первого возможного варианта набора 614 данных переходов состояния и второго возможного варианта набора 624 данных переходов состояния, процессор 110 может сравнивать соответствующие оценочные показатели 714 и 724 энергоэффективности, чтобы определять оценочный показатель энергоэффективности, указывающий меньший объем топлива, израсходованного посредством транспортного средства 220. Таким образом, процессор 110 выполнен с возможностью определения целевого набора данных переходов состояния в качестве наиболее топливоэффективного возможного варианта набора данных переходов состояния.
[0140] Например, процессор 110 может определять то, что оценочный показатель 714 энергоэффективности соответствует меньшему объему израсходованного топлива, чем объем израсходованного топлива, представленный посредством второго оценочного показателя 724 энергоэффективности. Следовательно, процессор 110 переходит к выбору первого возможного варианта набора 614 данных переходов состояния в качестве целевого набора данных переходов состояния, за счет этого определяя наиболее энергоэффективный переход в полосе движения для транспортного средства 220. С этой целью, в начальный момент t0 времени, процессор 110 инициирует управление перемещением в полосе движения транспортного средства 220 таким образом, что фактические кинематические данные транспортного средства 220 в каждый из множества промежуточных моментов ti времени совпадают с соответствующими кинематическими данными в первом возможном варианте набора 614 данных переходов состояния (xi1@ti, vi1@ti, ai1@ti).
[0141] В неограничивающих вариантах осуществления настоящей технологии процессор 110 может быть выполнен с возможностью инициирования управления перемещением в полосе движения транспортного средства 220 посредством обработки по меньшей мере одного из ускорения в полосе движения и замедления в полосе движения транспортного средства 220. Таким образом, соответствующий переход транспортного средства 220 из начального состояния в один из возможных вариантов целевых состояний, инструктируемый посредством процессора 110, может выполняться только с использованием перемещения в полосе движения транспортного средства 220.
[0142] Другими словами, процессор 110 инструктирует транспортное средство 220 выполнять наиболее эффективный с точки зрения рывков переход в полосе движения из начального состояния в первый возможный вариант целевого состояния, посредством целевого момента tT времени, на основе определенных оценочных показателей 714 и 724 энергоэффективности. За счет этого, процессор 110 инструктирует транспортное средство 220 выполнять смену полосы движения таким образом, что транспортное средство 220, во время перемещения в полосе движения, должно ехать по наиболее топливоэффективному переходу из начального состояния; и во время поперечного перемещения, должно завершать смену полосы движения с безопасным предотвращением столкновения с препятствием 302.
[0143] В неограничивающих вариантах осуществления настоящей технологии, чтобы определять целевой набор данных переходов состояния, процессор 110 дополнительно может быть выполнен с возможностью определения оценочного показателя соблюдения правил дорожного движения для каждого из возможных вариантов наборов данных переходов состояния, ассоциированных с транспортным средством 220. Данный оценочный показатель соблюдения правил дорожного движения указывает, соответствует ли соответствующий возможный вариант набора данных переходов состояния переходу транспортного средства 220 из начального состояния в соответствующие возможные варианты целевых состояний, обеспечивающие возможность соблюдения правил дорожного движения. С этой целью, процессор 110 выполнен с возможностью определения целевого набора данных переходов состояния в качестве наиболее топливоэффективного возможного варианта набора данных переходов состояния, обеспечивающего возможность транспортному средству 220 выполнять смену полосы движения без нарушения правил дорожного движения.
[0144] Со ссылкой теперь на фиг. 8 проиллюстрирован процесс для определения оценочных показателей соблюдения правил дорожного движения для определенных возможных вариантов наборов данных переходов состояния, ассоциированных с транспортным средством 220, согласно неограничивающим вариантам осуществления настоящей технологии.
[0145] Как упомянуто выше процессор 110, через сеть 240 связи, имеет доступ к серверу 235. Сервер 235 обеспечивает процессор 110 информацией относительно правил дорожного движения, ассоциированных с секцией 340 дорожной карты. Например, процессор 110 в числе прочего может принимать, из сервера 235, индикатор запрета 802 на смену полосы движения в секции 340 дорожной карты, которая проиллюстрирована посредством визуального представления 322 на фиг. 3.
[0146] В этом примере процессор 110 выполнен с возможностью определения, на основе принимаемого индикатора запрета 802 на смену полосы движения: (1) первого оценочного показателя 814 соблюдения правил дорожного движения, на основе первого возможного варианта набора 614 данных переходов состояния; и (2) второго оценочного показателя соблюдения правил дорожного движения, на основе второго возможного варианта набора 624 данных переходов состояния. Соответственно, на основе определенных оценочных показателей соблюдения правил дорожного движения, процессор выполнен с возможностью определения целевого набора данных переходов состояния.
[0147] Например, процессор 110 может определять то, что первый оценочный показатель 814 соблюдения правил дорожного движения равен 0, что означает то, что первый возможный вариант набора 614 данных переходов состояния соответствует переходу транспортного средства 220 из начального состояния в первый возможный вариант целевого состояния, который не обеспечивает возможность транспортному средству 220 соблюдать правила дорожного движения в секции 340 дорожной карты. Более конкретно, ссылаясь на фиг. 3, в визуальном представлении 310 секции 340 дорожной карты, соответствующей первому возможному варианту целевого состояния транспортного средства 220, этот переход должен приводить к нарушению правила дорожного движения, запрещающего смену полосы движения, поскольку в целевой момент tT времени, поперечное перемещение транспортного средства 220 должно проходить через визуальное представление 322. Следовательно, процессор 110 затем переходит отбрасывать первый возможный вариант набора 614 данных переходов состояния при определении целевого набора данных переходов состояния.
[0148] Тем не менее, процессор 110 также может определять то, что второй оценочный показатель 824 соблюдения правил дорожного движения равен 1, что означает то, что второй возможный вариант набора 624 данных переходов состояния соответствует переходу транспортного средства 220 из начального состояния во второй возможный вариант целевого состояния, который обеспечивает возможность транспортному средству 220 соблюдать правила дорожного движения в секции 340 дорожной карты. Более конкретно, ссылаясь на фиг. 3, в визуальном представлении 320 секции 340 дорожной карты, соответствующей второму возможному варианту целевого состояния транспортного средства 220, этот переход должен приводить к выполнению, в целевой момент tT времени, поперечного перемещения транспортного средства 220 без нарушения правил дорожного движения. Следовательно, поскольку в описанном примере предусмотрено только два возможных варианта наборов данных переходов состояния, процессор 110 затем переходит к определению второго возможного варианта набора 624 данных переходов состояния в качестве целевого набора данных переходов состояния.
[0149] Соответственно, процессор 110 инициирует управление перемещением в полосе движения транспортного средства 220 таким образом, что фактические кинематические данные транспортного средства 220 в каждый из множества промежуточных моментов ti времени совпадают с соответствующими кинематическими данными из второго возможного варианта набора 624 данных переходов состояния (xi2@ti, vi2@ti, ai2@ti).
[0150] В некоторых неограничивающих вариантах осуществления настоящей технологии процессор 110 может быть выполнен с возможностью определения целевого набора данных переходов состояния на основе более двух возможных вариантов наборов данных переходов состояния. С этой целью, процессор 110 может быть выполнен с возможностью определения целевого набора данных переходов состояния на основе как соответствующих оценочных показателей энергоэффективности, так и оценочных показателей соблюдения правил дорожного движения, ассоциированных с возможными вариантами наборов данных переходов состояния.
[0151] Вернемся к примеру, включающему в себя другое препятствие, движущееся позади препятствия 302, приведенному относительно фиг. 5. Допустим, что второй и третий возможный вариант кинематических данных транспортного средства 220 соответствуют второму и третьему возможным вариантам наборов данных переходов состояния (не проиллюстрированы), соответственно, определенным согласно примерам, описанным выше относительно фиг. 6. Дополнительно процессор 110 может быть выполнен с возможностью определения второго и третьего оценочных показателей энергоэффективности, ассоциированных с соответствующими возможными вариантами наборов данных переходов состояния (не проиллюстрированы). В завершение, процессор 110 дополнительно может быть выполнен с возможностью определения соответствующих второго и третьего оценочных показателей соблюдения правил дорожного движения как равные 1, что соответствует переходам транспортного средства 220 из начального состояния во второй и третий возможный вариант целевого состояния, обеспечивающие возможность транспортному средству 220 соблюдать правила дорожного движения в секции 340 дорожной карты. Таким образом, процессор 110 затем переходит к определению целевого набора данных переходов состояния в качестве набора данных, ассоциированного с оценочным показателем эффективности более высокой энергии. Другими словами, процессор 110 затем переходит к определению целевого набора данных переходов состояния в качестве наиболее топливоэффективного набора данных переходов состояния между вторым возможным вариантом набора данных переходов состояния и третьим возможным вариантом набора данных переходов состояния.
[0152] В неограничивающих вариантах осуществления настоящей технологии число правил дорожного движения, учитываемых посредством процессора 110 при определении оценочных показателей соблюдения правил дорожного движения, не ограничено и может включать в себя другие правила дорожного движения, предписанные для данной секции дорожной карты.
[0153] Например, процессор 110 может определять то, что первый возможный вариант набора 614 данных переходов состояния включает в себя, в некоторый один из множества промежуточных временных интервалов ti, значение мгновенной скорости транспортного средства 220, превышающее ограничение скорости, предписанное для секции 340 дорожной карты. Соответственно, процессор 110 затем выполнен с возможностью отбрасывания первого возможного варианта набора 614 данных переходов состояния при определении целевого набора данных переходов состояния. В другом примере, в вариантах осуществления по фиг. 3, допустим, что вместо визуального представления 322 правила, запрещающего смену полосы движения, предусмотрено визуальное представление одного пешеходного перехода и перекрестка. Процессор 110 затем выполнен с возможностью отбрасывания первого возможного варианта набора 614 данных переходов состояния, поскольку переход транспортного средства 220, ассоциированного с первым возможным вариантом набора 614 данных переходов состояния, должен приводить к тому, что транспортное средство 220 нарушает правила дорожного движения, предписывающие не сменять полосу движения на перекрестках и пешеходных переходах.
[0154] За счет этого, процессор 110 инструктирует транспортное средство 220 выполнять смену полосы движения таким образом, что транспортное средство 220, во время перемещения в полосе движения, должно ехать по наиболее топливоэффективному переходу из начального состояния с соблюдением правил дорожного движения, предписанных для данной секции дорожной карты; и во время поперечного перемещения, должно завершать смену полосы движения с безопасным предотвращением столкновения с любыми препятствиями.
[0155] С учетом архитектуры и примеров, обеспеченных выше, можно осуществлять способ для управления перемещением в полосе движения SDV (например, транспортного средства 220). Со ссылкой теперь на фиг. 9, проиллюстрирована блок-схема последовательности операций способа 900, согласно неограничивающим вариантам осуществления настоящей технологии. Способ 900 осуществляется посредством процессора 110. Процессор 110, например, может представлять собой часть электронного устройства 210.
[0156] Способ 900 осуществляется посредством процессора 110, чтобы обеспечивать возможность транспортному средству 220 выполнять будущий маневр в упомянутый предварительно определенный будущий момент времени (например, в целевой момент tT времени, описанный в данном документе). Транспортное средство 220 движется по полосе движения, например, как проиллюстрировано на фиг. 3. В неограничивающих вариантах осуществления настоящей технологии, будущий маневр может представлять собой смену полосы движения с начальной полосы движения, в которой движется транспортное средство 220, на одну из соседних полос движения.
[0157] Вообще говоря, процессор 110 инструктирует транспортное средство 220 выполнять смену полосы движения посредством (1) выполнения перемещения в полосе движения от начального момента t0 времени до целевого момента tT времени; и (2) выполнения поперечного перемещения в целевой момент tT времени, который, в примере по фиг. 3, должен представлять собой поворот налево. Процессор 110 выполнен с возможностью определения начального момента t0 времени как находящийся раньше целевого момента tT времени на предварительно определенный временной интервал.
[0158] В неограничивающих вариантах осуществления настоящей технологии перемещение в полосе движения транспортного средства 220 отличается посредством, по меньшей мере, (1) значения координаты вдоль оси 332, x; (2) значения мгновенной скорости в полосе движения, v; и (3) значения мгновенного ускорения/замедления в полосе движения, a.
[0159] Согласно неограничивающим вариантам осуществления настоящей технологии одна из соседних полос движения, в которые транспортное средство 220 инструктируют выполнять смену полосы движения, может включать в себя по меньшей мере одно препятствие. Препятствие может представлять собой подвижное препятствие (например, препятствие 302, проиллюстрированное на фиг. 3), включающее в себя другое транспортное средство, например, или неподвижное препятствие.
Этап 902 - Получение, посредством электронного устройства, начальных кинематических данных, ассоциированных с препятствием, которые указывают начальное состояние препятствия в начальный момент времени
[0160] Способ 900 начинается на этапе 902 с получения, посредством процессора 110, начальных кинематических данных, ассоциированных с препятствием 302, с использованием системы 230 датчиков (например, начальных кинематических данных 306 препятствия, ассоциированных с препятствием 302).
[0161] В неограничивающих вариантах осуществления настоящей технологии, начальные кинематические данные 306 препятствия (xobs@t0; vobs@t0; aobs@t0), указывают начальное состояние препятствия 302 в начальный момент t0 времени, который проиллюстрирован в визуальном представлении 300 на фиг. 3.
Этап 904 - Определение, посредством электронного устройства, будущих кинематических данных, ассоциированных с препятствием, которые указывают будущее состояние препятствия в упомянутый предварительно определенный будущий момент времени
[0162] На этапе 904, процессор 110 выполнен с возможностью определения, на основе начальных кинематических данных 306 препятствия (xobs@t0; vobs@t0; aobs@t0), целевых кинематических данных 316 препятствия. В неограничивающих вариантах осуществления настоящей технологии целевые кинематические данные 316 препятствия указывают целевое состояние препятствия для препятствия 302 в целевой момент tT времени. Целевое состояние препятствия проиллюстрировано в визуальных представлениях 310 и 320 на фиг. 3.
[0163] В неограничивающих вариантах осуществления настоящей технологии процессор 110 выполнен с возможностью, чтобы определять целевые кинематические данные 316 препятствия, доступа к модели оценки кинематических данных. Например, процессор 110 может иметь доступ к модели 400 оценки кинематических данных, за счет которой процессор 110 определяет целевые кинематические данные 316 препятствия (xobs@tT; vobs@tT; aobs@tT).
Этап 906 - Получение, посредством электронного устройства, начальных кинематических данных, ассоциированных с SDV, которые указывают начальное состояние SDV в начальный момент времени
[0164] На этапе 906, процессор 110 выполнен с возможностью, на основе использования системы 230 датчиков, получения начальных кинематических данных 304 транспортного средства (xv@t0; vv@t0; av@t0), ассоциированных с транспортным средством 220. Согласно неограничивающим вариантам осуществления настоящей технологии, начальные кинематические данные 304 транспортного средства указывают начальное состояние транспортного средства 220 в начальный момент t0 времени, который проиллюстрирован в визуальном представлении 300 на фиг. 3.
[0165] В неограничивающих вариантах осуществления настоящей технологии начальное состояние транспортного средства 220 означает состояние, при котором процессор 110 начинает инструктировать транспортное средство 220 выполнять перемещение в полосе движения в качестве части выполнения смены полосы движения.
Этап 908 - Определение, посредством электронного устройства, будущих кинематических данных, ассоциированных с SDV, которые указывают по меньшей мере два возможных варианта будущих состояний SDV в упомянутый предварительно определенный будущий момент времени
[0166] На этапе 908, процессор 110 выполнен с возможностью определения по меньшей мере двух возможных вариантов кинематических данных транспортного средства 220, ассоциированных с соответствующими возможными вариантами целевых состояний транспортного средства 220. Данный возможный вариант целевого состояния транспортного средства 220 представляет собой состояние транспортного средства 220, при котором процессор 110 инструктирует транспортное средство 220 завершать перемещение в полосе движения, имеющее данный возможный вариант кинематических данных, и начинать поперечное перемещение, чтобы выполнять смену полосы движения с учетом препятствия 302. Другими словами, данный возможный вариант целевого состояния транспортного средства 220 означает состояние транспортного средства 220 в целевой момент tT времени, в которое транспортное средство 220 инструктируют переходить из начального состояния при езде по траектории в полосе движения.
[0167] В неограничивающих вариантах осуществления настоящей технологии процессор 110 выполнен с возможностью определения данного возможного варианта кинематических данных для транспортного средства 220 таким образом, что транспортное средство избегает столкновения с препятствием 302 при выполнении поперечного перемещения.
[0168] С этой целью, процессор 110 выполнен с возможностью обеспечения транспортному средству 220 по меньшей мере двух вариантов траектории в полосе движения: (1) ускорение транспортного средства 220 таким образом, что транспортное средство 220 находится впереди препятствия 302 на расстоянии, не меньшем первого запаса по безопасности, что, например, может быть проиллюстрировано посредством визуального представления 310 секции 340 дорожной карты; или (2) замедление транспортного средства 220 таким образом, что транспортное средство 220 находится перед препятствием 302 на расстоянии, не меньшем второго запаса по безопасности, что, например, может быть проиллюстрировано посредством визуального представления 320 секции 340 дорожной карты. Процессор 110 может быть выполнен с возможностью выбора первого запаса по безопасности и второго запаса по безопасности таким образом, что транспортное средство 220, от целевого момента tT времени до завершения смены полосы движения, должно избегать столкновений с препятствием 302. За счет этого процессор 110 выполнен с возможностью определения, по меньшей мере, первого возможного варианта целевого состояния и второй возможного варианта целевого состояния для транспортного средства 220, чтобы выполнять перемещение в полосе движения из начального состояния. Соответственно, первый и второй возможные варианты целевых состояний транспортного средства 220 соответствуют состояниям транспортного средства 220, при которых транспортное средство 220 не имеет препятствия 302, что обеспечивает возможность транспортному средству 220 выполнять смену полосы движения безопасно, т.е. с избеганием столкновений с препятствием 302. С этой целью, первый возможный вариант целевого состояния и второй возможный вариант целевого состояния транспортного средства 220 в целевой момент tT времени соответствуют надлежащим окнам возможности для транспортного средства 220 выполнять смену полосы движения с учетом препятствия 302.
[0169] В неограничивающих вариантах осуществления настоящей технологии процессор 110 затем выполнен с возможностью определения соответствующего возможного варианта кинематических данных для транспортного средства 220, соответствующего первому возможному варианту целевого состояния и второму возможному варианту целевого состояния. В этом отношении процессор 110 может иметь доступ к возможному варианту конечной модели оценки кинематических данных. Например, после осуществления доступа к возможному варианту 500 конечной модели оценки кинематических данных, описанному выше со ссылкой на фиг. 5, процессор 110, на основе начальных кинематических данных 304 транспортного средства и целевых кинематических данных 316 препятствия, может определять: (1) первый возможный вариант 314 кинематических данных (xv1@tT; vv1@tT; av1@tT) и (2) второй возможный вариант 324 кинематических данных (xv2@tT; vv2@tT; av2@tT).
Этап 910 - Определение, посредством электронного устройства, по меньшей мере двух возможных вариантов наборов данных переходов состояния для перехода SDV из начального состояния SDV в соответствующий один из упомянутых по меньшей мере двух возможных вариантов будущих состояний SDV с использованием перемещения в полосе движения
[0170] На этапе 910 после определения кинематических данных транспортного средства 220, соответствующих начальному состоянию и одному или более возможных вариантов целевых состояний транспортного средства 220, процессор 110 дополнительно выполнен с возможностью, на основе этого, определения соответствующих возможных вариантов наборов данных переходов состояния. В неограничивающих вариантах осуществления настоящей технологии данный возможный вариант набора данных переходов состояния задает переход в полосе движения транспортного средства 220 из начального состояния в соответствующий возможный вариант целевого состояния.
[0171] В неограничивающих вариантах осуществления настоящей технологии данный возможный вариант набора данных переходов состояния представляет структуру данных (например, вектор), включающую в себя, по меньшей мере, часть кинематических данных (например, значение координаты, значение скорости в полосе движения или значение ускорения в полосе движения) транспортного средства 220, определенных для каждого из множества промежуточных моментов ti времени между начальным моментом t0 времени и целевым моментом tT времени.
[0172] В неограничивающих вариантах осуществления настоящей технологии процессор 110 может быть выполнен с возможностью выбора множества промежуточных моментов ti времени на основе предварительно определенного значения шага. Тем не менее, другие способы выбора множества промежуточных моментов времени также могут использоваться посредством процессора 110, чтобы выбирать множество промежуточных моментов ti времени.
[0173] В неограничивающих вариантах осуществления настоящей технологии, чтобы определять соответствующие возможные варианты наборов данных переходов состояния, процессор 110 может иметь доступ к алгоритму минимизации рывков. Например, процессор 110 может иметь доступ к алгоритму 600 минимизации рывков, описанному выше со ссылкой на фиг. 6, который используется для минимизации ассоциированных рывков в полосе движения. Таким образом, процессор 110 выполнен с возможностью подачи (1) начальных кинематических данных 304 транспортного средства, (2) первого возможного варианта 314 кинематических данных (3) и второго возможного варианта 324 кинематических данных в алгоритм 600 минимизации рывков. Следовательно, алгоритм 600 минимизации рывков выводит первый возможный вариант набора 614 данных переходов состояния и второй возможный вариант набора 624 данных переходов состояния. Соответственно, первый возможный вариант набора 614 данных переходов состояния включает в себя, для каждого из множества промежуточных моментов ti времени, соответствующие кинематические данные транспортного средства 220 (xi1@ti, vi1@ti, ai1@ti). Второй набор данных возможных вариантов переходов состояния включает в себя, для каждого из множества промежуточных моментов ti времени, соответствующие кинематические данные транспортного средства 220 (xi2@ti, vi2@ti, ai2@ti).
[0174] Таким образом, каждый из первого возможного варианта набора 614 данных переходов состояния и второго возможного варианта набора 624 данных переходов состояния соответствует надлежащему наиболее эффективному с точки зрения рывков набору данных переходов состояния, задающему соответствующий переход в полосе движения транспортного средства 220 из начального состояния в соответствующий возможный вариант целевого состояния только с использованием перемещения в полосе движения.
[0175] В некоторых неограничивающих вариантах осуществления настоящей технологии процессор 110 может быть выполнен с возможностью формирования данного возможного варианта набора данных переходов состояния в форме профиля скорости. Данный профиль скорости представляет вектор, в котором соответствующее значение скорости транспортного средства 220 соответствует каждому из множества промежуточных моментов ti времени. Посредством применения алгоритма 600 минимизации рывков для того, чтобы формировать данный профиль скорости, процессор 110 оптимизирует каждое значение мгновенной скорости транспортного средства 220, соответствующе надлежащему одному из множества промежуточных моментов ti времени, с тем чтобы минимизировать соответствующие рывки в полосе движения, ассоциированные с ним.
[0176] В неограничивающих вариантах осуществления настоящей технологии процессор 110 может быть дополнительно выполнен с возможностью выбора одного из первого возможного варианта набора 614 данных переходов состояния и второго возможного варианта набора 624 данных переходов состояния, за счет этого определяя целевой набор данных переходов состояния. Целевой набор данных переходов состояния задает наиболее энергоэффективный переход в полосе движения транспортного средства 220 из начального состояния в соответствующий возможный вариант целевого состояния.
Этап 912 - Определение, посредством электронного устройства, оценочного показателя энергоэффективности для соответствующего одного из упомянутых по меньшей мере двух возможных вариантов наборов данных переходов состояния
[0177] На этапе 912, чтобы определять целевой набор данных переходов состояния, процессор 110 выполнен с возможностью определения оценочных показателей энергоэффективности для переходов в полосе движения транспортного средства 220, заданных посредством первого возможного варианта набора 614 данных переходов состояния и второго возможного варианта набора 624 данных переходов состояния.
[0178] В неограничивающих вариантах осуществления настоящей технологии данный оценочный показатель энергоэффективности указывает объем топлива, который требуется транспортному средству 220 для того, чтобы выполнять данный переход в полосе движения. Таким образом, данный оценочный показатель энергоэффективности указывает то, насколько топливоэффективным является данный переход в полосе движения транспортного средства 220. Чтобы определять данный оценочный показатель энергоэффективности, процессор 110 может иметь доступ к модели оценки энергоэффективности.
[0179] Например, процессор 110 может иметь доступ к модели 700 оценки энергоэффективности, описанной в данном документе со ссылкой на фиг. 7. Таким образом, процессор 110 может быть выполнен с возможностью определения первого оценочного показателя 714 энергоэффективности и второго оценочного показателя 724 энергоэффективности.
[0180] В неограничивающих вариантах осуществления настоящей технологии процессор 110 дополнительно может быть выполнен с возможностью сравнения первого оценочного показателя 714 энергоэффективности со вторым оценочным показателем 724 энергоэффективности, чтобы определять наиболее топливоэффективный переход в полосе движения транспортного средства 220, соответствующий целевому набору данных переходов состояния. С этой целью, процессор 110 выполнен с возможностью определения оценочного показателя энергоэффективности, который должен соответствовать меньшему объему израсходованного топлива.
[0181] Например, процессор 110 может определять то, что оценочный показатель 714 энергоэффективности соответствует меньшему объему топлива, чем объем топлива, ассоциированный со вторым оценочным показателем 724 энергоэффективности. Соответственно, процессор 110 определяет то, что целевой набор данных переходов состояния в качестве первого возможного варианта набора 614 данных переходов состояния, поскольку первый возможный вариант набора 614 данных переходов состояния в силу этого определяется в качестве наиболее топливоэффективного набора данных переходов состояния из числа упомянутых по меньшей мере двух возможных вариантов наборов данных переходов состояния, ассоциированных с транспортным средством 220.
[0182] В неограничивающих вариантах осуществления настоящей технологии процессор 110 дополнительно может быть выполнен с возможностью определения, для каждого возможного варианта набора данных переходов состояния, оценочного показателя соблюдения правил дорожного движения. Оценочный показатель соблюдения правил дорожного движения указывает, соблюдает ли данный переход в полосе движения транспортного средства 220 между начальным состоянием и соответствующим возможным вариантом целевого состояния правила дорожного движения, предписанные для данной секции дорожной карты (например, для секции 340 дорожной карты).
[0183] С этой целью, процессор 110 может иметь доступ, через сеть 240 связи, к серверу 235. Сервер 235 обеспечивает процессор 110 информацией относительно правил дорожного движения, ассоциированных с секцией 340 дорожной карты. Таким образом, процессор 110 выполнен с возможностью приема, из сервера 235, индикатора по меньшей мере одного правила дорожного движения, например, запрета 802 на смену полосы движения в секции 340 дорожной карты, поясненной выше со ссылкой на фиг. 8.
[0184] В примере по фиг. 8, процессор 110 может быть выполнен с возможностью определения, на основе принимаемого индикатора запрета 802 на смену полосы движения: (1) первого оценочного показателя 814 соблюдения правил дорожного движения, на основе первого возможного варианта набора 614 данных переходов состояния; и (2) второго оценочного показателя соблюдения правил дорожного движения, на основе второго возможного варианта набора 624 данных переходов состояния. Соответственно, на основе определенных оценочных показателей соблюдения правил дорожного движения, процессор выполнен с возможностью определения целевого набора данных переходов состояния.
[0185] Например, процессор может определять то, что первый оценочный показатель 814 соблюдения правил дорожного движения равен 0 (переход в первый возможный вариант целевого состояния не соблюдает правила дорожного движения), и второй оценочный показатель 824 соблюдения правил дорожного движения равен 1 (переход во второй возможный вариант целевого состояния соблюдает правила дорожного движения). Соответственно, процессор 110 выполнен с возможностью перехода к определению целевого набора данных переходов состояния в качестве второго возможного варианта набора 624 данных переходов состояния, поскольку переход в полосе движения транспортного средства 220, заданный таким способом, соблюдает правила дорожного движения, предписанные для секции 340 дорожной карты.
[0186] Таким образом, процессор 110 выполнен с возможностью определения целевого набора данных переходов состояния в качестве наиболее топливоэффективного набора данных из числа упомянутых по меньшей мере двух возможных вариантах наборов данных переходов состояния, который обеспечивает возможность транспортному средству 220 соблюдать правила дорожного движения, предписанные для данной секции дорожной карты.
Этап 914 - Инициирование управления перемещением в полосе движения SDV на основе целевого набора данных переходов состояния из числа упомянутых по меньшей мере двух возможных вариантов наборов данных переходов состояния
[0187] На этапе 914 процессор 110 инструктирует транспортное средство 220 выполнять переход в полосе движения из начального состояния в соответствующий возможный вариант целевого состояния, ассоциированного с целевым набором данных переходов состояния. В этом отношении процессор 110 инициирует управление по меньшей мере одним из ускорения в полосе движения и замедления в полосе движения таким образом, что фактические кинематические данные транспортного средства 220 в каждый из множества промежуточных моментов ti времени совпадают с соответствующими целевыми кинематическими данными из целевого набора данных переходов состояния.
[0188] В примере, в котором процессор 110 определяет целевой набор данных переходов состояния в качестве первого возможного варианта набора 614 данных переходов состояния в начальный момент t0 времени, процессор 110 инициирует управление перемещением в полосе движения транспортного средства 220 таким образом, что фактические кинематические данные транспортного средства 220 в каждый из множества промежуточных моментов ti времени совпадают с соответствующими кинематическими данными в первом возможном варианте набора 614 данных переходов состояния (xi1@ti, vi1@ti, ai1@ti). За счет этого, процессор 110 инструктирует транспортное средство 220 выполнять смену полосы движения таким образом, что транспортное средство 220 во время перемещения в полосе движения должно ехать по наиболее топливоэффективному переходу из начального состояния; и во время поперечного перемещения, должно завершать смену полосы движения с безопасным предотвращением столкновения с препятствием 302.
[0189] В другом примере, в котором процессор 110 определяет целевой набор данных переходов состояния в качестве второго возможного варианта набора 624 данных переходов состояния в начальный момент t0 времени, процессор 110 инициирует управление перемещением в полосе движения транспортного средства 220 таким образом, что фактические кинематические данные транспортного средства 220 в каждый из множества промежуточных моментов ti времени совпадают с соответствующими кинематическими данными из второго возможного варианта набора 624 данных переходов состояния (xi2@ti, vi2@ti, ai2@ti). За счет этого, процессор 110 инструктирует транспортное средство 220 выполнять смену полосы движения таким образом, что транспортное средство 220, во время перемещения в полосе движения, должно ехать по наиболее топливоэффективному переходу из начального состояния с соблюдением правил дорожного движения, предписанных для данной секции дорожной карты; и во время поперечного перемещения, должно завершать смену полосы движения с безопасным предотвращением столкновения с препятствием 302.
[0190] Следует четко понимать, что не все технические эффекты, упомянутые в данном документе, должны использоваться в каждом варианте осуществления настоящей технологии.
[0191] Модификации и улучшения вышеописанных реализаций настоящей технологии могут становиться очевидными для специалистов в данной области техники. Вышеприведенное описание должно быть примерным, а не ограничивающим. В силу этого, объем настоящей технологии имеет намерение быть ограниченным исключительно посредством объема прилагаемой формулы изобретения.

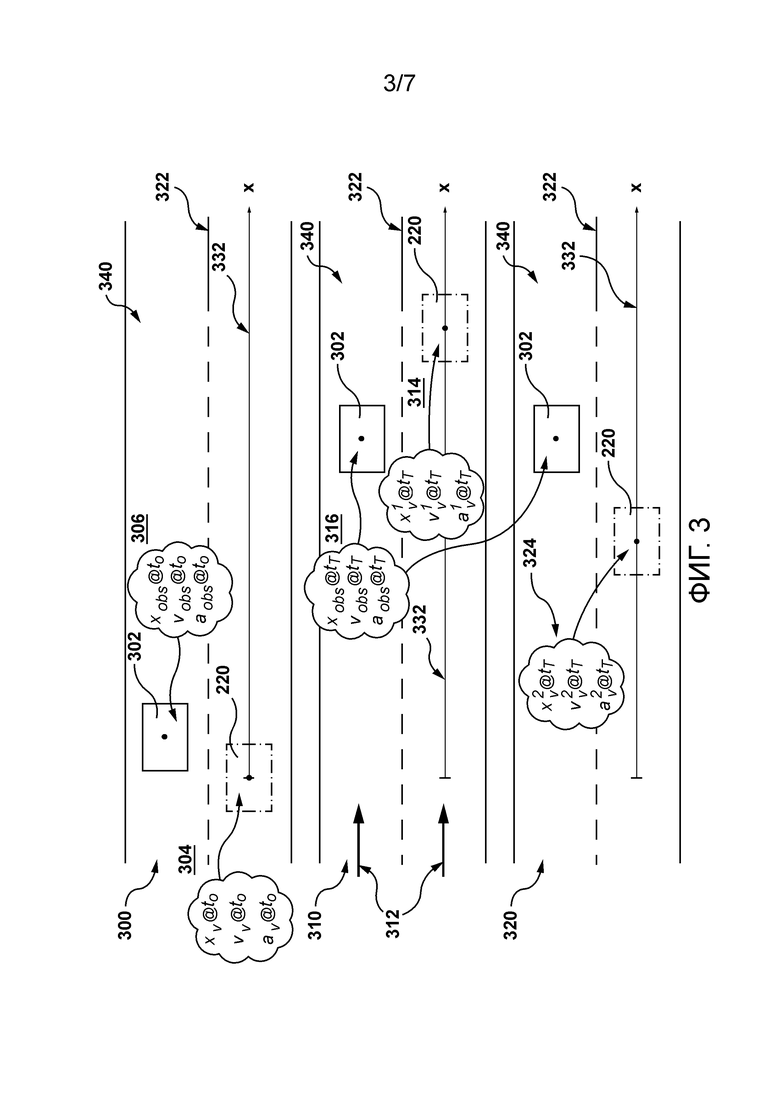

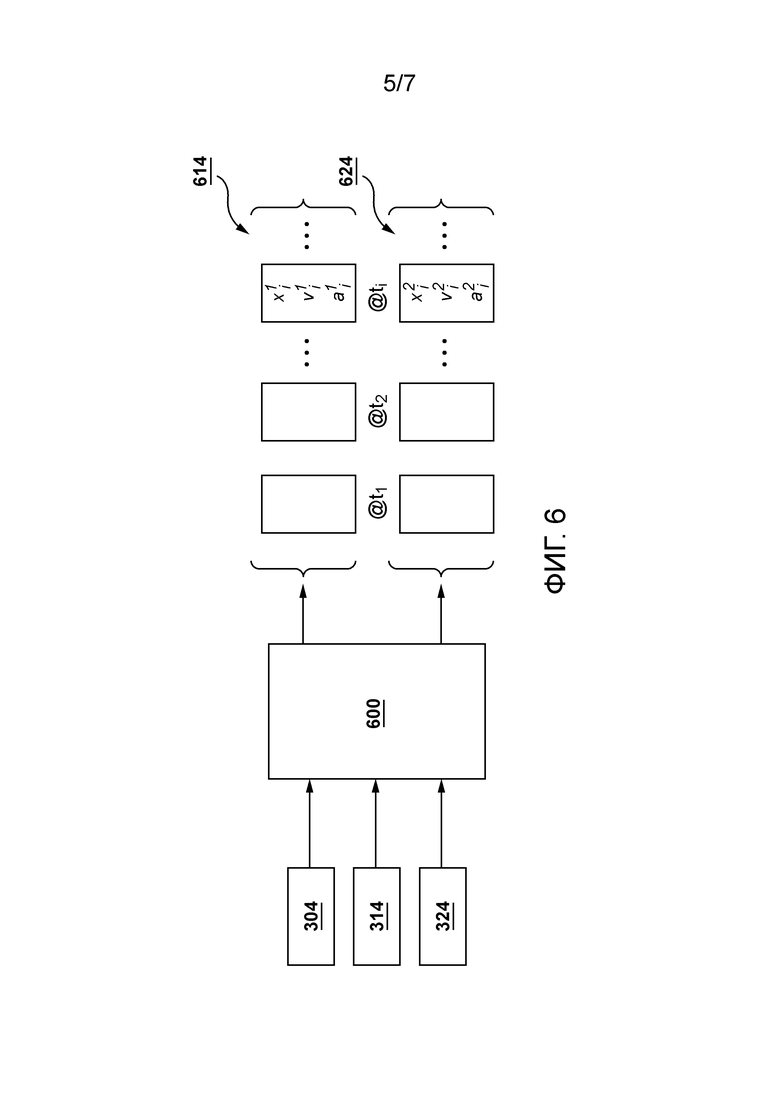
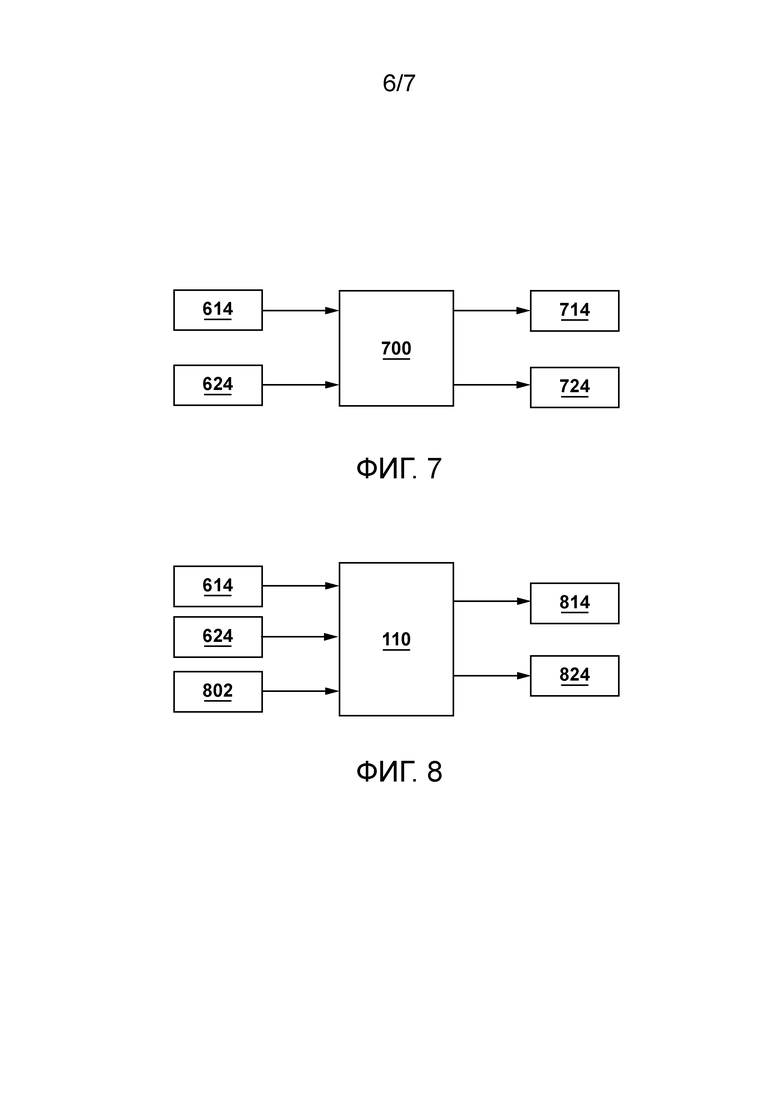
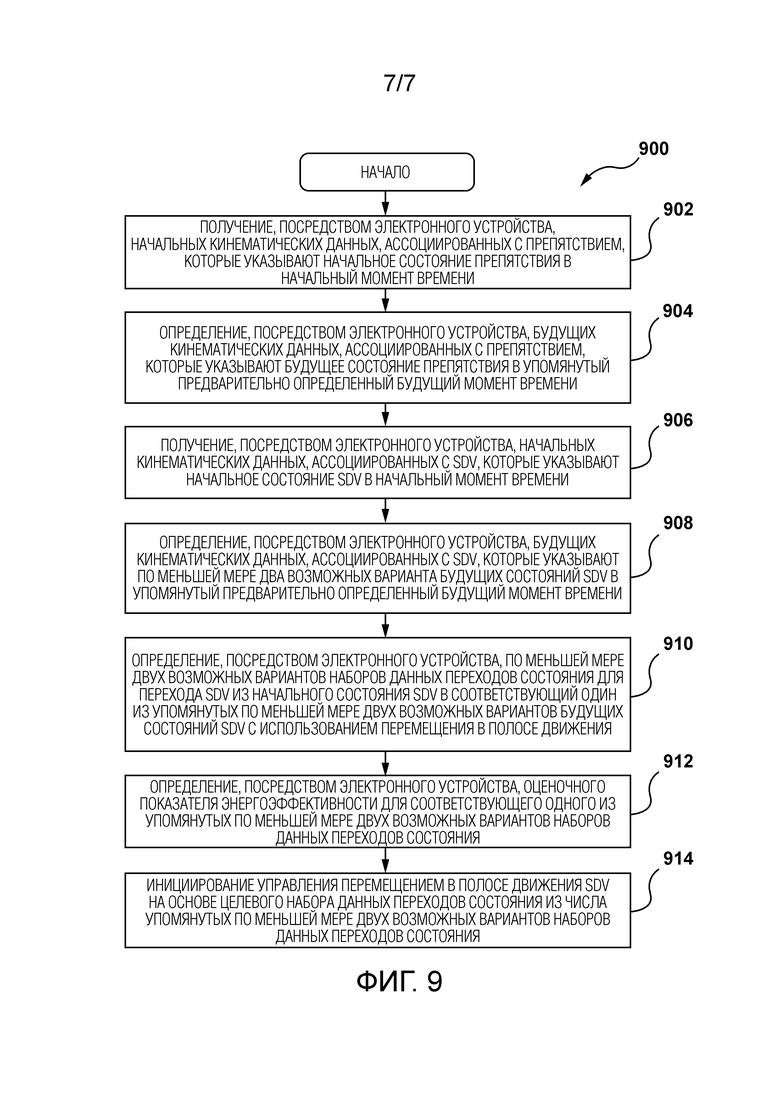
Изобретение относится к способу и процессору для управления перемещением в полосе движения беспилотного транспортного средства. SDV движется в полосе движения на участке дороги, причем перемещением в полосе движения SDV следует управлять для обеспечения возможности выполнять будущий маневр, который следует выполнять в предварительно определенный будущий момент времени. Способ осуществляют посредством электронного устройства, соединенного с возможностью связи с SDV. Способ содержит этапы, на которых получают начальные кинематические данные, ассоциированные с препятствием, которые указывают начальное состояние препятствия в начальный момент времени, определяют будущие кинематические данные, ассоциированные с упомянутым препятствием, которые указывают будущее состояние упомянутого препятствия в упомянутый предварительно определенный будущий момент времени, получают начальные кинематические данные, ассоциированные с SDV, определяют будущие кинематические данные, ассоциированные с SDV, которые указывают по меньшей мере два возможных варианта будущих состояний SDV, определяют по меньшей мере два возможных варианта наборов данных переходов состояния для перехода SDV из начального состояния SDV в соответствующий один из упомянутых по меньшей мере двух возможных вариантов будущих состояний SDV с использованием перемещения в полосе движения, определяют оценочный показатель энергоэффективности для соответствующего одного из упомянутых по меньшей мере двух возможных вариантов наборов данных переходов состояния и инициируют управление перемещением в полосе движения SDV на основе целевого набора данных переходов состояния из числа упомянутых по меньшей мере двух возможных вариантов наборов данных переходов состояния. Целевой набор данных переходов состояния представляет собой наиболее топливоэффективный набор данных переходов состояния из числа упомянутых по меньшей мере двух возможных вариантов наборов данных переходов состояния. Достигается повышение безопасности автономного транспортного средства. 2 н. и 18 з.п. ф-лы, 9 ил.
1. Способ управления перемещением в полосе движения беспилотного транспортного средства (SDV),
- причем SDV движется в полосе движения на участке дороги,
- причем перемещением в полосе движения SDV следует управлять для обеспечения возможности SDV выполнять будущий маневр, причем будущий маневр следует выполнять в предварительно определенный будущий момент времени,
- причем способ осуществляют посредством электронного устройства, соединенного с возможностью связи с SDV, при этом способ содержит этапы, на которых:
- получают, посредством электронного устройства, начальные кинематические данные, ассоциированные с препятствием, которые указывают начальное состояние препятствия в начальный момент времени,
- причем начальный момент времени находится раньше во времени, чем упомянутый предварительно определенный будущий момент времени;
- определяют, посредством электронного устройства, будущие кинематические данные, ассоциированные с упомянутым препятствием, которые указывают будущее состояние упомянутого препятствия в упомянутый предварительно определенный будущий момент времени;
- получают, посредством электронного устройства, начальные кинематические данные, ассоциированные с SDV, которые указывают начальное состояние SDV в начальный момент времени;
- определяют, посредством электронного устройства, будущие кинематические данные, ассоциированные с SDV, которые указывают по меньшей мере два возможных варианта будущих состояний SDV в упомянутый предварительно определенный будущий момент времени,
- причем упомянутые по меньшей мере два возможных варианта будущих состояний SDV обеспечивают возможность SDV выполнять будущий маневр в упомянутый предварительно определенный будущий момент времени;
- определяют, посредством электронного устройства, по меньшей мере два возможных варианта наборов данных переходов состояния для перехода SDV из начального состояния SDV в соответствующий один из упомянутых по меньшей мере двух возможных вариантов будущих состояний SDV с использованием перемещения в полосе движения;
- определяют, посредством электронного устройства, оценочный показатель энергоэффективности для соответствующего одного из упомянутых по меньшей мере двух возможных вариантов наборов данных переходов состояния,
- причем данный оценочный показатель энергоэффективности указывает то, насколько топливоэффективным является переход между начальным состоянием и соответствующим возможным вариантом будущего состояния; и
- инициируют, посредством электронного устройства, управление перемещением в полосе движения SDV на основе целевого набора данных переходов состояния из числа упомянутых по меньшей мере двух возможных вариантов наборов данных переходов состояния,
- причем целевой набор данных переходов состояния представляет собой наиболее топливоэффективный набор данных переходов состояния из числа упомянутых по меньшей мере двух возможных вариантов наборов данных переходов состояния.
2. Способ по п. 1, при этом способ дополнительно содержит этап, на котором:
- сравнивают, посредством электронного устройства, оценочные показатели энергоэффективности упомянутых по меньшей мере двух возможных вариантов наборов данных переходов состояния для определения целевого набора данных переходов состояния.
3. Способ по п. 1, при этом способ дополнительно содержит этап, на котором:
- определяют, посредством электронного устройства, оценочный показатель соблюдения правил дорожного движения для соответствующего одного из упомянутых по меньшей мере двух возможных вариантов наборов данных переходов состояния,
- причем данный оценочный показатель соблюдения правил дорожного движения указывает, соответствует ли переход между начальным состоянием и соответствующим возможным вариантом будущего состояния правилам дорожного движения упомянутого участка дороги;
- и при этом целевой набор данных переходов состояния представляет собой наиболее топливоэффективный набор данных переходов состояния из числа упомянутых по меньшей мере двух возможных вариантов наборов данных переходов состояния, который обеспечивает возможность SDV соблюдать правила дорожного движения упомянутого участка дороги.
4. Способ по п. 1, в котором будущий маневр представляет собой смену полосы движения с начальной полосы движения, в которой SDV движется в начальный момент времени, на другую полосу движения, в которой присутствует препятствие в начальный момент времени.
5. Способ по п. 1, в котором препятствие представляет собой одно из подвижного препятствия и неподвижного препятствия.
6. Способ по п. 1, в котором предварительно определенный будущий момент времени представляет собой момент времени, когда SDV не имеет препятствия.
7. Способ по п. 5, в котором подвижное препятствие представляет собой другое транспортное средство.
8. Способ по п. 1, в котором данный возможный вариант набора данных переходов состояния включает в себя возможные варианты кинематических данных относительно SDV во множестве промежуточных моментов времени между начальным моментом времени и будущим моментом времени.
9. Способ по п. 8, в котором инициирование управления перемещением в полосе движения SDV на основе целевого набора данных переходов состояния содержит этап, на котором:
- инициируют, посредством электронного устройства, управление по меньшей мере одним из ускорения в полосе движения и замедления в полосе движения SDV таким образом, что:
- (i) фактические кинематические данные SDV во множестве промежуточных моментов времени совпадают (ii) с целевыми кинематическими данными из целевого набора данных переходов состояния во множестве промежуточных моментов времени.
10. Способ по п. 1, в котором по меньшей мере два возможных варианта будущих состояний SDV в упомянутый предварительно определенный будущий момент времени соответствуют надлежащим окнам возможности выполнить будущий маневр в упомянутый предварительно определенный будущий момент времени.
11. Способ по п. 1, в котором определение по меньшей мере двух возможных вариантов наборов данных переходов состояния выполняют посредством алгоритма минимизации рывков в полосе движения, и при этом:
- данный возможный вариант набора данных переходов состояния для SDV задает наиболее эффективный с точки зрения рывков набор данных переходов состояния для перехода SDV из начального состояния SDV в соответствующий возможный вариант будущего состояния SDV только с использованием перемещения в полосе движения.
12. Способ по п. 11, в котором перемещение в полосе движения характеризуется по меньшей мере одним из следующего: ускорение в полосе движения и замедление в полосе движения.
13. Способ по п. 11, в котором алгоритм минимизации рывков в полосе движения формирует упомянутые по меньшей мере два возможных варианта наборов данных переходов состояния для SDV, причем упомянутые по меньшей мере два возможных варианта наборов данных переходов состояния для SDV представляют как профили скорости.
14. Способ по п. 13, в котором профили скорости оптимизируют, чтобы минимизировать рывки в полосе движения.
15. Электронное устройство, содержащее:
- процессор;
- интерфейс связи для осуществления связи с датчиком, установленным на беспилотном транспортном средстве (SDV);
- причем процессор выполнен с возможностью:
- получения начальных кинематических данных, ассоциированных с препятствием, которые указывают начальное состояние препятствия в начальный момент времени,
- причем начальный момент времени находится раньше во времени, чем упомянутый предварительно определенный будущий момент времени;
- определения будущих кинематических данных, ассоциированных с упомянутым препятствием, которые указывают будущее состояние упомянутого препятствия в упомянутый предварительно определенный будущий момент времени;
- получения начальных кинематических данных, ассоциированных с SDV, которые указывают начальное состояние SDV в начальный момент времени;
- определения будущих кинематических данных, ассоциированных с SDV, которые указывают по меньшей мере два возможных варианта будущих состояний SDV в упомянутый предварительно определенный будущий момент времени,
- причем упомянутые по меньшей мере два возможных варианта будущих состояний SDV обеспечивают возможность SDV выполнять будущий маневр в упомянутый предварительно определенный будущий момент времени;
- определения по меньшей мере двух возможных вариантов наборов данных переходов состояния для перехода SDV из начального состояния SDV в соответствующий один из упомянутых по меньшей мере двух возможных вариантов будущих состояний SDV с использованием перемещения в полосе движения;
- определения оценочного показателя энергоэффективности для соответствующего одного из упомянутых по меньшей мере двух возможных вариантов наборов данных переходов состояния,
- причем данный оценочный показатель энергоэффективности указывает то, насколько топливоэффективным является переход между начальным состоянием и соответствующим возможным вариантом будущего состояния; и
- инициирования управления перемещением в полосе движения SDV на основе целевого набора данных переходов состояния из числа упомянутых по меньшей мере двух возможных вариантов наборов данных переходов состояния,
- причем целевой набор данных переходов состояния представляет собой наиболее топливоэффективный набор данных переходов состояния из числа упомянутых по меньшей мере двух возможных вариантов наборов данных переходов состояния.
16. Электронное устройство по п. 15, в котором процессор дополнительно выполнен с возможностью:
- сравнения оценочных показателей энергоэффективности упомянутых по меньшей мере двух возможных вариантов наборов данных переходов состояния для определения целевого набора данных переходов состояния.
17. Электронное устройство по п. 15, в котором процессор дополнительно выполнен с возможностью:
- определения оценочного показателя соблюдения правил дорожного движения для соответствующего одного из упомянутых по меньшей мере двух возможных вариантов наборов данных переходов состояния,
- причем данный оценочный показатель соблюдения правил дорожного движения указывает, соблюдает ли переход между начальным состоянием и соответствующим возможным вариантом будущего состояния правила дорожного движения упомянутого участка дороги, и при этом:
- целевой набор данных переходов состояния представляет собой наиболее топливоэффективный набор данных переходов состояния из числа упомянутых по меньшей мере двух возможных вариантов наборов данных переходов состояния, который обеспечивает возможность SDV соблюдать правила дорожного движения упомянутого участка дороги.
18. Электронное устройство по п. 15, в котором процессор, выполненный с возможностью инициирования управления перемещением в полосе движения SDV на основе целевого набора данных переходов состояния, дополнительно выполнен с возможностью:
- инициирования управления по меньшей мере одним из ускорения в полосе движения и замедления в полосе движения SDV таким образом, что:
- (i) фактические кинематические данные SDV во множестве промежуточных моментов времени совпадают (ii) с целевыми кинематическими данными из целевого набора данных переходов состояния во множестве промежуточных моментов времени.
19. Электронное устройство по п. 15, в котором процессор, выполненный с возможностью определения по меньшей мере двух возможных вариантов наборов данных переходов состояния, дополнительно выполнен с возможностью выполнения алгоритма минимизации рывков в полосе движения, и при этом:
- данный возможный вариант набора данных переходов состояния для SDV задает наиболее эффективный с точки зрения рывков набор данных переходов состояния для перехода SDV из начального состояния SDV в соответствующий возможный вариант будущего состояния SDV только с использованием перемещения в полосе движения.
20. Электронное устройство по п. 19, в котором процессор, с использованием алгоритма минимизации рывков в полосе движения, выполнен с возможностью формирования упомянутых по меньшей мере двух возможных вариантов наборов данных переходов состояния для SDV, причем упомянутые по меньшей мере два возможных варианта наборов данных переходов состояния для SDV представляются как профили скорости.
| US 7117076 B2, 03.10.2006 | |||
| US 9868443 B2, 16.01.2018 | |||
| СПОСОБ И СИСТЕМА ДЛЯ СОДЕЙСТВИЯ УДЕРЖАНИЮ ПОЛОСЫ ДВИЖЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2618837C2 |

