Область техники, к которой относится изобретение
[01] Настоящая технология в целом относится к световым системам обнаружения и измерения дальности (LiDAR, Light Detection and Ranging,) и в частности - к способам и системам выборочного сканирования объектов в интересующих областях.
Уровень техники
[02] Лидарные системы (световые системы обнаружения и измерения дальности, также называемые лидарами) широко используются в самоуправляемых (автономных) транспортных средствах. Лидарные системы позволяют измерять расстояние между системой и окружающими объектами, освещая окружающее пространство светом и улавливая свет, отраженный от одного или нескольких объектов в этом окружающем пространстве.
[03] В типичной времяпролетной (ToF, Time of Flight) лидарной системе источник света излучает множество импульсных узких лазерных лучей для сканирования поля обзора. Свет, отраженный от объекта и/или рассеянный объектом в поле обзора, принимается блоком обнаружения лидарной системы для определения местоположения объекта. Во времяпролетных системах измеряется время между (1) излучением светового луча и (2) обнаружением рассеянного светового луча для определения расстояния до объекта.
[04] Отраженные лучи, принятые лидаром, обрабатываются для формирования точек данных с помощью центрального компьютера, при этом каждый импульс луча отображается как одна точка данных в облаке точек, представляя окружающую обстановку в виде трехмерной карты. Трехмерная карта является более или менее подробной и точной в зависимости от плотности или частоты обновления облака точек. В общем случае, чем выше частота выборки в поле обзора, тем более подробной и точной оказывается трехмерная карта.
[05] Частота импульсов, излучаемых лидарной системой, и соответствующее количество точек обычно ограничивается несколькими факторами. Например, для некоторых лазерных источников в лидарах может быть ограничена частота излучения (максимальная частота импульсов), при превышении которой может снижаться мощность лазерного источника. В таком случае мощность световых импульсов, излучаемых лазером, снижается и мощность принимаемого отраженного света снижается соответственно. Например, для объектов с низкой отражающей способностью меньшей мощности лазерных импульсов может быть недостаточно для получения сигнала, пригодного для формирования трехмерной карты.
[06] Следовательно, требуются системы и способы, позволяющие исключить, уменьшить или преодолеть ограничения известных технических решений.
Раскрытие изобретения
[07] Разработчики настоящей технологии нашли определенные решения, позволяющие исключить, уменьшить и/или преодолеть по меньшей мере некоторые ограничения предшествующего уровня техники.
[08] В соответствии с широким аспектом настоящей технологии реализована времяпролетная лидарная система с несколькими режимами сканирования для оптимизации частоты сканирования в зависимости от плотности объектов, формирующих сильные сигналы. В соответствии с не имеющими ограничительного характера вариантами осуществления настоящей технологии, лидарная система содержит источник света, представляющий собой лазерный источник, соединенный с волоконным усилителем. В некоторых случаях волоконный усилитель представляет собой усилитель на легированном волокне, в частности, усилитель на легированном эрбием волокне (EDFA, Erbium Doped Fiber Amplifier). Например, в лидарной системе с усилителем EDFA импульсы, излучаемые лазерным источником, усиливаются возбужденными ионами эрбия в сердцевине волокна. После того, как сформированный импульс лазерного луча излучается лидарной системой, требуется некоторое время для накачки источника света, которое определяется скоростью инверсии населенности в легированном волоконном усилителе. Таким образом, при частоте импульсов (т.е. частоте излучения импульсов), превышающей частоту накачки (инверсии населенности), мощность импульсов, излучаемых источником света, снижается из-за неполной накачки усилителя.
[09] В соответствии с не имеющими ограничительного характера вариантами осуществления настоящей технологии для одной или нескольких областей поля обзора системы определяется отношение сигнал-шум и сравнивается с заранее заданным пороговым отношением сигнал-шум для управления лидарной системой в одном из множества режимов сканирования. Для областей поля обзора, в которых отношение сигнал/шум выше порогового значения, частота импульсов выходного луча может быть повышена для увеличения пространственного разрешения (или частоты обновления) трехмерной карты такой области. С применением настоящей технологии частота импульсов может быть повышена до величины, превышающей скорость инверсии населенности усилителя на легированном волокне, если отношение сигнал/шум превышает пороговое значение. Таким образом, даже при меньшей мощности светового импульса в идентифицированной области выполняется более частая выборка за счет излучения до завершения инверсии населенности в усилителе. Поскольку световой импульс пониженной мощности направляется только в области с достаточно высоким отношением сигнал/шум при исходной мощности, ожидается, что в этих областях и при пониженной мощности формируется сигнал приемлемого качества. Соответственно, в областях с отношением сигнал/шум, не превышающим порогового значения, выборка с повышенной частотой не выполняется, чтобы исключить прием слишком слабого отраженного сигнала из-за снижения мощности светового импульса. Это позволяет сбалансировать пространственное разрешение и мощность сигнала.
[010] В соответствии с первым широким аспектом настоящей технологии реализован способ управления оптической системой. Способ включает в себя воздействие контроллером на источник света для излучения импульсов света с первой частотой следования импульсов, направление импульсов света сканирующим устройством, подключенным к контроллеру, из оптической системы, обнаружение по меньшей мере одним датчиком, подключенным к контроллеру, светового сигнала, отраженного от по меньшей мере одного объекта в поле обзора оптической системы, определение контроллером отношения сигнал-шум отраженного светового сигнала, определение контроллером разности между отношением сигнал/шум и пороговым отношением сигнал-шум и воздействие контроллером на источник света для излучения импульсов света со второй частотой следования импульсов, отличной от первой частоты следования импульсов, на основе этой разности.
[011] В некоторых вариантах осуществления изобретения способ дополнительно включает в себя определение контроллером того, что отношение сигнал/шум больше порогового отношения сигнал-шум, при этом вторая частота следования импульсов больше первой частоты следования импульсов.
[012] В некоторых вариантах осуществления изобретения вторая частота следования импульсов больше частоты накачки источника света.
[013] В некоторых вариантах осуществления изобретения отношение сигнал/шум является первым отношением сигнал/шум, а способ после воздействия на источник света для излучения импульсов света со второй частотой следования импульсов дополнительно включает в себя определение контроллером второго отношения сигнал/шум, определение контроллером того, что второе отношение сигнал/шум меньше порогового отношения сигнал-шум, и воздействие контроллером на источник света для излучения импульсов света с третьей частотой следования импульсов, отличной от второй частоты следования импульсов.
[014] В некоторых вариантах осуществления изобретения третья частота следования импульсов равна первой частоте следования импульсов.
[015] В некоторых вариантах осуществления изобретения определение отношения сигнал/шум отраженного светового сигнала включает в себя определение контроллером отношения сигнал/шум подзоны, соответствующего отношению сигнал/шум части отраженного сигнала, поступающей из интересующей области в пределах поля обзора, определение разности между отношением сигнал/шум и порогом отношения сигнал-шум включает в себя определение контроллером того, что отношение сигнал/шум подзоны больше порогового отношения сигнал/шум, а воздействие контроллером на источник света для излучения импульсов света со второй частотой следования импульсов включает в себя воздействие контроллером на источник света для излучения импульсов света со второй частотой следования импульсов при сканировании этой интересующей области, если отношение сигнал/шум подзоны превышает пороговое отношение сигнал/шум.
[016] В некоторых вариантах осуществления изобретения определение отношения сигнал/шум подзоны включает в себя определение контроллером множества отношений сигнал/шум подзоны для множества интересующих областей, определение того, что отношение сигнал/шум подзоны больше порогового отношения сигнал-шум, включает в себя определение того, что по меньшей мере одно отношение сигнал/шум подзоны из множества отношений сигнал/шум подзоны больше порогового отношения сигнал/шум, при этом по меньшей мере одно отношение сигнал/шум подзоны соответствует сигналам, принятым в интересующей области из множества интересующих областей, и воздействие контроллером на источник света для излучения импульсов света со второй частотой следования импульсов при сканировании интересующей области, если по меньшей мере одно отношение сигнал/шум превышает пороговое отношение сигнал-шум.
[017] В соответствии со вторым широким аспектом настоящей технологии реализован способ управления оптической системой. Способ включает в себя воздействие контроллером на источник света для излучения импульсов света с первой частотой следования импульсов, направление блоком сканирования, подключенным к контроллеру, импульсов света из оптической системы, обнаружение по меньшей мере одним датчиком, подключенным к контроллеру, множества световых сигналов, отраженных в поле обзора оптической системы, состоящем из множества интересующих областей, управление контроллером источником света, по меньшей мере частично, на основе множества отраженных световых сигналов, при этом управление для интересующей области включает в себя определение контроллером отношения сигнал/шум отраженного светового сигнала этой интересующей области, определение контроллером разности между отношением сигнал/шум и пороговым отношением сигнал/шум, воздействие контроллером на источник света для излучения импульсов света со второй частотой следования импульсов, отличной от первой частоты следования импульсов, на основе разности сигналов при сканировании этой интересующей области.
[018] В некоторых вариантах реализации отношение сигнал/шум больше порогового отношения сигнал-шум, а вторая частота следования импульсов больше первой частоты следования импульсов.
[019] В некоторых вариантах осуществления изобретения интересующая область является первой интересующей областью, отношение сигнал/шум является первым отношением сигнал/шум, а для второй интересующей области способ дополнительно включает в себя определение контроллером второго отношения сигнал/шум светового сигнала, отраженного во второй интересующей области, определение контроллером разности между вторым отношением сигнал/шум и пороговым отношением сигнал/шум и воздействие контроллером на источник света для излучения импульсов света с третьей частотой следования импульсов, отличной от первой частоты следования импульсов, на основе этой разности при сканировании второй интересующей области.
[020] В некоторых вариантах осуществления изобретения третья частота следования импульсов равна второй частоте следования импульсов.
[021] В соответствии с еще одним широким аспектом настоящей технологии реализована система, содержащая источник света, блок сканирования, способный направлять свет от источника света, приемный блок, способный принимать свет, отраженный от объектов окружающего пространства и содержащий по меньшей мере один датчик, а также контроллер, подключенный по меньшей мере к блоку сканирования и приемному блоку и способный выполнять хранящиеся в нем команды, включая воздействие контроллером на источник света для излучения импульсов света с первой частотой следования импульсов, направление импульсов света сканирующим устройством, подключенным к контроллеру, из оптической системы, обнаружение по меньшей мере одним датчиком, подключенным к контроллеру, светового сигнала, отраженного от по меньшей мере одного объекта в поле обзора оптической системы, определение контроллером отношения сигнал-шум отраженного светового сигнала, определение контроллером разности между отношением сигнал/шум и пороговым отношением сигнал-шум и воздействие контроллером на источник света для излучения импульсов света со второй частотой следования импульсов, отличной от первой частоты следования импульсов, на основе этой разности.
[022] В некоторых вариантах осуществления изобретения вторая частота следования импульсов больше первой частоты следования импульсов.
[023] В некоторых вариантах осуществления изобретения источник света содержит лазер, подключенный к контроллеру, и усилитель на легированном волокне.
[024] В некоторых вариантах осуществления изобретения вторая частота следования импульсов больше первой частоты следования импульсов и больше частоты накачки усилителя на легированном волокне.
[025] В соответствии с еще одним широким аспектом настоящей технологии реализована лидарная система, содержащая источник света, блок сканирования, способный направлять импульсы света из источника света, приемный блок, способный принимать световые сигналы, отраженные от объектов окружающего пространства и содержащий по меньшей мере один датчик, а также контроллер, подключенный по меньшей мере к блоку сканирования и приемному блоку и способный выполнять описанный выше способ в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления изобретения.
[026] В контексте данного описания термин «источник света» в целом относится к любому устройству, способному излучать сигнал, например, в виде луча, в том числе, луча света с одной или несколькими длинами волн в электромагнитном спектре. В одном примере осуществления изобретения источником света может быть лазерный источник. Таким образом, источник света может содержать лазер, например, твердотельный лазер, лазерный диод, лазер высокой мощности или альтернативный источник света, например, источник света на основе светоизлучающих диодов. Некоторыми (не имеющими ограничительного характера) примерами лазерного источника являются лазерный диод Фабри-Перо, лазер на квантовых ямах, лазер с распределенным брэгговским отражателем (DBR, Distributed Bragg Reflector), лазер с распределенной обратной связью (DFB, Distributed FeedBack), волоконный лазер или поверхностно-излучающий лазер с вертикальным резонатором (VCSEL, Vertical-Cavity Surface-Emitting Laser). Кроме того, лазерный источник может излучать световые лучи в различных форматах, например, световые импульсы, непрерывные колебания, квазинепрерывные колебания и т.д. В некоторых не имеющих ограничительного характера примерах лазерный источник может содержать лазерный диод, способный излучать свет с длиной волны в диапазоне приблизительно 650-1150 нм. В альтернативном варианте источник света может содержать лазерный диод, способный излучать свет с длиной волны в диапазоне приблизительно 800-1000 нм, приблизительно 850-950 нм, приблизительно 1300-1600 нм или в любом другом подходящем диапазоне. Если не указано иное, термин «приблизительно» применительно к числовому значению означает отклонение, не превышающее 10% от указанного значения.
[027] В контексте данного описания термин «выходной луч» может также относиться к пучку излучения, например, к лучу света, формируемому источником излучения и направленному в сторону интересующей области. Выходной луч может характеризоваться одним или несколькими параметрами, такими как продолжительность излучения, угловая расходимость луча, длина волны, мгновенная мощность, плотность фотонов на разных расстояниях от источника света, средняя мощность, удельная мощность пучка, ширина луча, частота повторения импульсов излучения, последовательность излучаемых импульсов, скважность импульсов, длина волны, фаза и т.д. Выходной луч может быть неполяризованным или случайно поляризованным, может не иметь определенной или постоянной поляризации (например, поляризация может меняться со временем) или может иметь определенную поляризацию (например, линейную, эллиптическую или круговую поляризацию).
[028] В контексте данного описания «входной луч» представляет собой излучение или свет, попадающий в систему, обычно после отражения от одного или нескольких объектов в интересующей области. Входной луч также может называться лучом излучения или световым лучом. Термин «отражение» означает, что по меньшей мере часть выходного луча падает на один или несколько объектов в интересующей области и отражается от этого одного или нескольких объектов. Входной луч может характеризоваться одним или несколькими параметрами, такими как время пролета (т.е. время от момента излучения до момента обнаружения), мгновенная мощность (например, сигнатура мощности), средняя мощность обратного импульса, распределение фотонов в сигнале по периоду обратного импульса и т.д. В зависимости от конкретного использования, некоторая часть излучения или света во входном луче может исходить не от отраженного выходного луча, а от других источников. Например, по меньшей мере некоторая часть входного луча может представлять сбой световой шум из окружающего пространства (в том числе - рассеянный солнечный свет) или от других источников света, внешних по отношению к настоящей системе.
[029] В контексте данного описания термин «окружающее пространство» транспортного средства относится к площади или объему вокруг транспортного средства, включая часть его текущего окружающего пространства, доступную для сканирования с использованием одного или нескольких датчиков, установленных на этом транспортном средстве, например, для формирования трехмерной карты такого окружающего пространства или для обнаружения в нем объектов.
[030] В контексте данного описания термин «интересующая область» может в широком смысле означать часть наблюдаемого окружающего пространства лидарной системы, в которой могут быть обнаружены один или несколько объектов. Следует отметить, что на интересующую область лидарной системы могут влиять различные условия, такие как ориентация лидарной системы (например, направление оптической оси лидарной системы), положение лидарной системы в окружающем пространстве (например, расстояние над поверхностью земли, рельеф местности и препятствия в непосредственной близи от системы), рабочие параметры лидарной системы (например, мощность излучения, вычислительные настройки, заданные углы работы) и т.д., но не ограничиваясь ими. Интересующая область лидарной системы может быть определена, например, плоским или телесным углом. В одном примере интересующая область также может быть определена дальностью (например, приблизительно до 200 м).
[031] В контексте данного описания «сервер» представляет собой компьютерную программу, выполняемую на соответствующем оборудовании и способную принимать по сети запросы (например, от электронных устройств) и выполнять эти запросы или инициировать их выполнение. Соответствующие аппаратные средства могут быть реализованы в виде одного компьютера или одной компьютерной системы, что не существенно для настоящей технологии. В данном контексте выражение «сервер» не означает, что каждая задача (например, принятая команда или запрос) или некоторая конкретная задача принимается, выполняется или запускается одним и тем же сервером (т.е. одними и теми же программными и/или аппаратными средствами). Это выражение означает, что любое количество программных средств или аппаратных средств может принимать, отправлять, выполнять или запускать выполнение любой задачи или запроса либо результатов любых задач или запросов. Все эти программные и аппаратные средства могут представлять собой один сервер или несколько серверов, причем оба эти случая подразумеваются в выражении «по меньшей мере один сервер».
[032] В контексте данного описания «электронное устройство» представляет собой любое компьютерное оборудование, способное выполнять программное обеспечение, подходящее для поставленной задачи. В контексте данного описания термин «электронное устройство» подразумевает, что устройство может функционировать в качестве сервера для других электронных устройств, тем не менее, это не является обязательным для настоящей технологии. Таким образом, некоторые (не имеющие ограничительного характера) примеры электронных устройств включают в себя устройство для автономного вождения, персональные компьютеры (настольные компьютеры, ноутбуки, нетбуки и т.д.), смартфоны и планшеты, а также сетевое оборудование, такое как маршрутизаторы, коммутаторы и шлюзы. Должно быть понятно, что в данном контексте тот факт, что устройство функционирует в качестве электронного устройства, не означает, что оно не может функционировать в качестве сервера для других электронных устройств.
[033] В контексте данного описания выражение «информация» включает в себя информацию любого рода или вида, допускающую хранение в базе данных. Таким образом, информация включает в себя визуальные произведения (например, карты), аудиовизуальные произведения (например, изображения, фильмы, звукозаписи, презентации и т.д.), данные (например, данные о местоположении, данные о погоде, данные о трафике, числовые данные и т.д.), текст (например, мнения, комментарии, вопросы, сообщения и т.д.), документы, электронные таблицы и т.д., но не ограничивается ими.
[034] В контексте данного описания термин «база данных» означает любой структурированный набор данных, независимо от его конкретной структуры, программного обеспечения для управления базой данных или компьютерных аппаратных средств для хранения этих данных, их применения или обеспечения их использования иным способом. База данных может располагаться в тех же аппаратных средствах, где реализован процесс, обеспечивающий хранение или использование информации, хранящейся в базе данных, либо база данных может располагаться в отдельных аппаратных средствах, таких как специализированный сервер или множество серверов.
[035] В контексте данного описания числительные «первый» «второй», «третий» и т.д. используются лишь для указания различия между существительными, к которым они относятся, но не для описания каких-либо определенных взаимосвязей между этими существительными. Кроме того, как встречается в данном описании в другом контексте, ссылка на «первый» элемент и «второй» элемент не исключает того, что эти два элемента в действительности могут быть одним и тем же элементом.
[036] Каждый вариант осуществления настоящей технологии относится к по меньшей мере одной из вышеупомянутых целей и/или аспектов, но не обязательно ко всем ним. Должно быть понятно, что некоторые аспекты настоящей технологии, связанные с попыткой достижения вышеупомянутой цели, могут не соответствовать этой цели и/или могут соответствовать другим целям, явным образом здесь не упомянутым.
[037] Дополнительные и/или альтернативные признаки, аспекты и преимущества вариантов осуществления настоящей технологии содержатся в дальнейшем описании, в приложенных чертежах и в формуле изобретения.
Краткое описание чертежей
[038] Эти и другие признаки, аспекты и преимущества настоящей технологии содержатся в дальнейшем описании, в приложенной формуле изобретения и на следующих чертежах.
[039] На фиг. 1 схематически представлен пример компьютерной системы, пригодной для реализации некоторых не имеющих ограничительного характера вариантов осуществления настоящей технологии.
[040] На фиг. 2 схематически представлена сетевая компьютерная среда, пригодная для использования с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
[041] На фиг. 3 схематически представлен пример лидарной системы, реализованной в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
[042] На фиг. 4 представлена блок-схема способа управления лидарной системой, показанной на фиг. 3, реализованного в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
Осуществление изобретения
[043] Представленные в данном описании примеры и условный язык предназначены для обеспечения лучшего понимания принципов настоящей технологии, а не для ограничения ее объема до таких специально приведенных примеров и условий. Очевидно, что специалисты в данной области техники способны разработать различные способы и устройства, которые явно не описаны и не показаны, но реализуют принципы настоящей технологии в пределах ее существа и объема.
[044] Кроме того, чтобы способствовать лучшему пониманию, последующее описание может содержать упрощенные варианты реализации настоящей технологии. Специалистам в данной области должно быть понятно, что другие варианты осуществления настоящей технологии могут быть значительно сложнее.
[045] В некоторых случаях приводятся полезные примеры модификаций настоящей технологии. Они способствуют пониманию, но также не определяют объема или границ настоящей технологии. Представленный перечень модификаций не является исчерпывающим и специалист в данной области может разработать другие модификации в пределах объема настоящей технологии. Кроме того, если в некоторых случаях модификации не описаны, это не означает, что они невозможны и/или что описание содержит единственно возможный вариант реализации того или иного элемента настоящей технологии.
[046] Описание принципов, аспектов и вариантов реализации настоящей технологии, а также их конкретные примеры предназначены для охвата их структурных и функциональных эквивалентов, независимо от того, известны они в настоящее время или будут разработаны в будущем. Например, специалистам в данной области техники должно быть понятно, что любые описанные здесь структурные схемы соответствуют концептуальным представлениям иллюстративных принципиальных схем, реализующих принципы настоящей технологии. Также должно быть понятно, что любые блок-схемы, схемы процессов, диаграммы изменения состояния, псевдокоды и т.п. соответствуют различным процессам, которые могут быть представлены на машиночитаемом физическом носителе информации и могут выполняться компьютером или процессором, независимо от того, показан такой компьютер или процессор явно или нет.
[047] Функции различных элементов, показанных на чертежах, включая любой функциональный блок, обозначенный как «процессор», могут быть реализованы с использованием специализированных аппаратных средств, а также аппаратных средств, способных выполнять соответствующее программное обеспечение. Если используется процессор, эти функции могут выполняться одним выделенным процессором, одним совместно используемым процессором или множеством отдельных процессоров, некоторые из которых могут использоваться совместно. Кроме того, явное использование термина «процессор» или «контроллер» не должно трактоваться как указание исключительно на аппаратные средства, способные выполнять программное обеспечение, и может подразумевать, помимо прочего, аппаратные средства цифрового сигнального процессора (DSP), сетевой процессор, специализированную интегральную схему (ASIC), программируемую вентильную матрицу (FPGA), ПЗУ для хранения программного обеспечения, ОЗУ и энергонезависимое ЗУ. Также могут подразумеваться другие аппаратные средства, общего назначения и/или заказные.
[048] Программные модули или просто модули, реализация которых предполагается в виде программных средств, могут быть представлены здесь в виде любого сочетания элементов блок-схемы или других элементов, указывающих на выполнение шагов процесса и/или содержащих текстовое описание. Такие модули могут выполняться аппаратными средствами, показанными явно или подразумеваемыми.
[049] Далее с учетом изложенных выше принципов рассмотрены некоторые не имеющие ограничительного характера примеры, иллюстрирующие различные варианты реализации аспектов настоящей технологии.
[050] Компьютерная система
[051] На фиг. 1 схематически представлена компьютерная система 100, пригодная для использования с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии. Компьютерная система 100 содержит различные элементы аппаратных средств, включая один или несколько одно- или многоядерных процессоров, обобщенно представленных процессором 110, твердотельный накопитель 120 и память 130, которая может представлять собой ОЗУ или память любого другого вида.
[052] Связь между элементами компьютерной системы 100 может осуществляться через одну или несколько внутренних и/или внешних шин (не показаны), таких как шина PCI, шина USB, шина FireWire стандарта IEEE 1394, шина SCSI, шина Serial-ATA и т.д., с которыми различные аппаратные элементы соединены электронным образом. Согласно вариантам осуществления настоящей технологии, твердотельный накопитель 120 хранит программные команды, пригодные для загрузки в память 130 и выполнения процессором 110 с целью определения наличия объекта. Например, программные команды могут входить в состав управляющего приложения транспортного средства, выполняемого процессором 110. Следует отметить, что компьютерная система 100 может содержать дополнительные и/или необязательные элементы (не показаны), такие как модули передачи данных по сети, модули определения местоположения и т.д.
[053] Сетевая компьютерная среда
[054] На фиг. 2 представлена сетевая компьютерная среда 200, пригодная для использования с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии. Сетевая компьютерная среда 200 содержит электронное устройство 210, связанное с транспортным средством 220 и/или с пользователем (не показан), который связан с транспортным средством 220 (в частности, с оператором транспортного средства 220). Сетевая компьютерная среда 200 также содержит сервер 235, соединенный с электронным устройством 210 через сеть 240 связи (например, через сеть Интернет и т.п., как более подробно описано ниже).
[055] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии сетевая компьютерная среда 200 может содержать спутник системы GPS (не показан), передающий сигнал GPS электронному устройству 210 и/или принимающий сигнал GPS от него. Должно быть понятно, что настоящая технология не ограничивается системой GPS и может использовать технологию определения местоположения, отличную от системы GPS. Следует отметить, что спутник GPS может вовсе отсутствовать.
[056] Транспортное средство 220, с которым связано электронное устройство 210, может представлять собой любое транспортное средство для отдыха или иных целей, например, автомобиль для личного или коммерческого использования, грузовой автомобиль, мотоцикл и т.д. Несмотря на то, что транспортное средство 220 изображено как наземное транспортное средство, это не является обязательным для каждого не имеющего ограничительного характера варианта осуществления настоящей технологии. Например, в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии транспортное средство 220 может быть водным транспортным средством, таким как лодка, или летательным аппаратом, таким как дрон.
[057] Транспортное средство 220 может управляться пользователем или может представлять собой самоуправляемое транспортное средство. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии предполагается, что транспортное средство 220 может быть реализовано как самоуправляемый автомобиль (SDC, Self-Driving Car). Следует отметить, что не накладывается каких-либо ограничений на конкретные параметры транспортного средства 200, такие как производитель транспортного средства, модель транспортного средства, год выпуска транспортного средства, масса транспортного средства, размеры транспортного средства, распределение массы транспортного средства, площадь поверхности транспортного средства, высота транспортного средства, вид трансмиссии (например, привод на два или четыре колеса), вид шин, тормозная система, топливная система, пробег, идентификационный номер транспортного средства и рабочий объем двигателя.
[058] Согласно настоящей технологии, на реализацию электронного устройства 210 не накладывается каких-либо конкретных ограничений. Например, электронное устройство 210 может быть реализовано в виде блока управления двигателем транспортного средства, центрального процессора транспортного средства, навигационного устройства транспортного средства (например, TomTom™, Garmin™), планшета, персонального компьютера, встроенного в транспортное средство 220, и т.д. Следует отметить, что электронное устройство 210 может быть связано или не связано с транспортным средством 220 постоянным образом. Дополнительно или в качестве альтернативы, электронное устройство 210 может быть реализовано в виде устройства беспроводной связи, такого как мобильный телефон (например, смартфон или радиотелефон). В некоторых вариантах осуществления изобретения электронное устройство 210 содержит дисплей 270.
[059] Электронное устройство 210 может содержать некоторые или все элементы компьютерной системы 100, представленной на фиг. 1, в зависимости от конкретного варианта осуществления изобретения. В некоторых вариантах осуществления изобретения электронное устройство 210 представляет собой бортовое компьютерное устройство и содержит процессор 110, твердотельный накопитель 120 и память 130. Иными словами, электронное устройство 210 содержит аппаратные средства и/или программное обеспечение и/или микропрограммное обеспечение или их комбинацию для осуществления обработки данных, как более подробно описано ниже.
[060] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии сеть 240 связи представляет собой сеть Интернет. В альтернативных не имеющих ограничительного характера вариантах осуществления настоящей технологии сеть 240 связи может быть реализована как любая подходящая локальная сеть (LAN, Local Area Network), глобальная сеть (WAN, Wide Area Network), частная сеть связи и т.п. Должно быть понятно, что варианты осуществления сети 240 связи приведены лишь в иллюстративных целях. Между электронным устройством 210 и сетью 240 связи предусмотрена линия связи (отдельно не обозначена), реализация которой зависит, среди прочего, от реализации электронного устройства 210. Лишь в качестве примера, не имеющего ограничительного характера, в тех вариантах осуществления настоящей технологии, где электронное устройство 210 реализовано в виде устройства беспроводной связи, такого как смартфон или навигационное устройство, линия связи может быть реализована в виде беспроводной линии связи. Примеры беспроводных линий связи включают в себя канал сети связи 3G, канал сети связи 4G и т.п. В сети 240 связи также может использоваться беспроводное соединение с сервером 235.
[061] В некоторых вариантах осуществления настоящей технологии сервер 235 реализован как компьютерный сервер и может содержать некоторые или все элементы компьютерной системы 100, показанной на фиг. 1. В одном не имеющем ограничительного характера примере сервер 235 реализован в виде сервера Dell™ PowerEdge™, работающего под управлением операционной системы Microsoft™ Windows Server™, но он также может быть реализован с использованием любых других подходящих аппаратных средств, программного обеспечения и/или микропрограммного обеспечения либо их сочетания. В представленных не имеющих ограничительного характера вариантах осуществления настоящей технологии сервер 235 представляет собой одиночный сервер. В других не имеющих ограничительного характера вариантах осуществления настоящей технологии (не показаны) функции сервера 235 могут быть распределены между несколькими серверами.
[062] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии процессор 110 электронного устройства 210 может быть связан с сервером 235 для получения одного или нескольких обновлений. Такие обновления могут включать в себя, среди прочего, обновления программного обеспечения, обновления карт, обновления маршрутов, обновления погодных данных и т.п. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии процессор 110 также может отправлять серверу 235 некоторые рабочие данные, такие как пройденные маршруты, данные о дорожном движении, рабочие характеристики и т.п. Некоторые или все данные, передаваемые между транспортным средством 220 и сервером 235, могут быть зашифрованы и/или обезличены.
[063] Следует отметить, что электронное устройство 210 может использовать множество датчиков и систем для сбора информации об окружающем пространстве 250 транспортного средства 220. Как показано на фиг. 2, транспортное средство 220 может быть оборудовано множеством систем 280 датчиков. Следует отметить, что для сбора данных различного вида об окружающем пространстве 250 транспортного средства 220 могут использоваться различные системы датчиков из множества систем 280 датчиков.
[064] В одном примере множество систем 280 датчиков может содержать различные оптические системы, в том числе, среди прочего, одну или несколько систем датчиков типа «камера», установленных на транспортном средстве 220 и подключенных к процессору 110 электронного устройства 210. В целом, одна или несколько систем датчиков типа «камера» может собирать данные изображения о различных частях окружающего пространства 250 транспортного средства 220. В некоторых случаях данные изображения, предоставленные одной или несколькими системами датчиков типа «камера», могут использоваться электронным устройством 210 для выполнения процедур обнаружения объекта. Например, электронное устройство 210 может передавать данные изображения, предоставленные одной или несколькими системами датчиков типа «камера», в нейронную сеть обнаружения объектов (ODNN, Object Detection Neural Network), обученную локализации и классификации потенциальных объектов в окружающем пространстве 250 транспортного средства 220.
[065] В другом примере множество систем 280 датчиков может содержать одну или несколько систем датчиков типа «радиолокатор», установленных на транспортном средстве 220 и подключенных к процессору 110. В целом, одна или несколько систем датчиков типа «радиолокатор» может использовать радиоволны для сбора данных о различных частях окружающего пространства 250 транспортного средства 220. Например, одна или несколько систем датчиков типа «радиолокатор» может собирать радиолокационные данные о потенциальных объектах в окружающем пространстве 250 транспортного средства 220 и эти данные могут относиться к расстоянию от системы датчиков типа «радиолокатор» до объектов, к ориентации объектов, к скорости объектов и т.п.
[066] Следует отметить, что множество систем 280 датчиков может содержать системы датчиков других видов в дополнение к описанным выше примерам в пределах объема настоящей технологии.
[067] Лидарная система
[068] В соответствии с настоящей технологией и как показано на фиг. 2, транспортное средство 220 оборудовано по меньшей мере одной лазерной системой обнаружения и измерения дальности (лидаром), такой как лидарная система 300 для сбора информации об окружающем пространстве 250 транспортного средства 220. Несмотря на то, что лидарная система 300 описана здесь только как прикрепленная к транспортному средству 220, также предполагается, что она может работать автономно или с подключением к другой системе.
[069] В зависимости от варианта осуществления изобретения, транспортное средство 220 может содержать больше или меньше лидарных систем 300, чем показано на рисунках. В зависимости от конкретного варианта осуществления изобретения, решение о количестве конкретных систем 280 датчиков из множества таких систем может зависеть от конкретного варианта осуществления лидарной системы 300. Лидарная система 300 может быть установлена на транспортном средстве 220 изначально или при его модернизации в различных его местах и/или в различных вариантах исполнения.
[070] Например, в зависимости от реализации транспортного средства 220 и лидарной системы 300, лидарная система 300 может быть установлена на внутренней верхней части лобового стекла транспортного средства 220. При этом, как показано на фиг. 2, установка лидарной системы 300 в других местах, включая заднее окно, боковые окна, передний капот, крышу, переднюю решетку, передний бампер или боковую сторону транспортного средства 220, не выходит за пределы настоящей технологии. В некоторых случаях лидарная система 300 может быть смонтирована в специальном корпусе, установленном сверху на транспортном средстве 220.
[071] В некоторых не имеющих ограничительного характера вариантах осуществления изобретения, таких как показанный на фиг. 2, одна лидарная система 300 из множества таких систем установлена на крыше транспортного средства 220 и способна вращаться. Например, лидарная система 300, установленная на транспортном средстве 220 и выполненная с возможностью вращения, может содержать по меньшей мере некоторые элементы, способные поворачиваться на 360 градусов вокруг оси вращения лидарной системы 300. Лидарная система 300, установленная с возможностью вращения, может собирать данные о большей части окружающего пространства 250 транспортного средства 220.
[072] В других не имеющих ограничительного характера вариантах осуществления настоящей технологии, таких как показанный на фиг. 2, лидарная система 300 установлена на боковой стороне или на передней решетке и выполнена, например, без возможности вращения. В частности, лидарная система 300, установленная на транспортном средстве 220 без возможности вращения, может содержать по меньшей мере некоторые элементы, не способные поворачиваться на 360 градусов, но способные собирать данные о заданных частях окружающего пространства 250 транспортного средства 220.
[073] Независимо от конкретного местоположения и/или конкретного варианта исполнения, лидарная система 300 способна осуществлять сбор данных об окружающем пространстве 250 транспортного средства 220, например, для построения многомерной карты объектов в окружающем пространстве 250 транспортного средства 220. Ниже описано, как лидарная система 300 осуществляет сбор данных об окружающем пространстве 250 транспортного средства 220.
[074] На фиг. 3 представлена схема одного конкретного варианта осуществления лидарной системы 300, реализованного в соответствии с не имеющими ограничительного характера вариантами осуществления настоящей технологии.
[075] В целом, лидарная система 300 содержит множество внутренних элементов, в том числе: (1) источник 302 света (также называемый источником излучения), (2) светоделительный элемент 304, (3) блок 308 сканирования (также называемый сканирующим узлом), (4) приемный блок 306 (также называемый системой обнаружения, приемным узлом или детектором), (5) контроллер 310. Предполагается, что в дополнение к внутренним элементам, перечисленным выше, лидарная система 300 может содержать множество датчиков (таких как, например, датчик температуры, датчик влажности и т.д.), которые не показаны на фиг. 3 для упрощения.
[076] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии один или несколько внутренних элементов лидарной системы 300 могут быть реализованы в общем корпусе 330, как показано на фиг. 3. В некоторых вариантах осуществления настоящей технологии контроллер 310 может быть расположен вне общего корпуса 330 и связан с находящимися в нем элементами.
[077] В общем случае лидарная система 300 работает следующим образом: источник 302 света лидарной системы 300 излучает импульсы света, формируя выходной луч 314, блок 308 сканирования сканирует выходным лучом 314 окружающее пространство 250 транспортного средства 220 для обнаружения или получения данных о находящихся в нем заранее неизвестных объектов (таких как объект 320), например, для создания многомерной карты окружающего пространства 250, где объекты (включая объект 320) представлены в виде одной или нескольких точек данных. Источник 302 света и блок 308 сканирования более подробно описаны ниже.
[078] В некоторых не имеющих ограничительного характера примерах объект 320 может включать в себя, полностью или частично, человека, транспортное средство, мотоцикл, грузовик, поезд, велосипед, инвалидную коляску, прогулочную коляску, пешехода, животное, дорожный знак, светофор, разметку полосы движения, разметку дорожного покрытия, парковочное место, пилон, ограждение, дорожный барьер, выбоину, железнодорожный переезд, препятствие на дороге или рядом с ней, бордюр, остановившееся транспортное средство на дороге или рядом с ней, столб, дом, иное строение, мусорный бак, почтовый ящик, дерево, любой другой подходящий объект или любое подходящее сочетание, полностью или частично, двух и более объектов.
[079] Далее, пусть объект 320 расположен на некотором расстоянии 318 от лидарной системы 300. Когда выходной луч 314 достигает объекта 320, в общем случае свет выходного луча 314 может по меньшей мере частично отражаться от объекта 320, при этом некоторые из отраженных световых лучей могут возвращаться обратно к лидарной системе 300 в виде входного луча 316. Термин «отражение» означает, что по меньшей мере часть света выходного луча 314 отражается от объекта 320. Часть света выходного луча 314 может поглощаться или рассеиваться объектом 320.
[080] Таким образом, входной луч 316 улавливается и обнаруживается лидарной системой 300 с помощью приемного блока 306. В результате приемный блок 306 способен формировать один или нескольких сигналов репрезентативных данных. Например, приемный блок 306 может сформировать выходной электрический сигнал (не показан), который представляет входной луч 316. Кроме того, приемный блок 306 может передавать сформированный таким образом электрический сигнал контроллеру 310 для дальнейшей обработки. Наконец, измеряя время между моментом излучения выходного луча 314 и моментом приема входного луча 316, контроллер 310 вычисляет расстояние 318 до объекта 320.
[081] Как более подробно описано ниже, светоделительный элемент 304 направляет выходной луч 314 от источника 302 света к блоку 308 сканирования и входной луч 316 от блока сканирования к приемному блоку 306.
[082] Использование и варианты реализации этих элементов лидарной системы 300 в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии описаны ниже.
[083] Источник света
[084] Источник 302 света связан с контроллером 310 и способен излучать свет с заданной рабочей длиной волны. Для этого в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии источник 302 света может содержать по меньшей мере один лазер, настроенный для работы на рабочей длине волны. Рабочая длина волны источника 302 света может находиться в инфракрасной, видимой и/или ультрафиолетовой части электромагнитного спектра. Например, источник 302 света может содержать по меньшей мере один лазер с рабочей длиной волны в диапазоне приблизительно 650-1150 нм. В альтернативном варианте источник 302 света может содержать лазерный диод, способный излучать свет с длиной волны в диапазоне приблизительно 800-1000 нм, приблизительно 850-950 нм или приблизительно 1300-1600 нм.
[085] Обычно источник 302 света лидарной системы 300 представляет собой безопасный для зрения лазер, или, иными словами, лидарная система 300 может быть классифицирована как безопасная для зрения лазерная система или лазерное изделие. В целом, безопасный для зрения лазер, лазерная система или лазерное изделие может быть системой с некоторыми или всеми из следующих характеристик: длиной волны излучения, средней мощностью, пиковой мощностью, пиковой интенсивностью, энергией импульса, размером луча, расходимостью луча, временем экспозиции и характеристиками сканирования выходным лучом, при которых вероятность нарушения зрения человека под воздействием излучаемого этой системой света мала или равна нулю.
[086] Согласно некоторым не имеющим ограничительного характера вариантам осуществления настоящей технологии, рабочая длина волны источника 302 света может лежать в области электромагнитного спектра, соответствующей излучаемому Солнцем свету. Поэтому в некоторых случаях солнечный свет может действовать как фоновый шум, способный маскировать световой сигнал, обнаруживаемый лидарной системой 300. Этот солнечный фоновый шум может приводить к ложноположительным обнаружениям и/или иным образом искажать измерения лидарной системы 300.
[087] В соответствии с настоящей технологией, источник 302 света содержит импульсный лазер 388, способный формировать, испускать или излучать импульсы света определенной длительности. Например, в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии источник 302 света может излучать импульсы с длительностью (т.е. с шириной импульса) от 10 пс до 100 нс. В других не имеющих ограничительного характера вариантах осуществления настоящей технологии источник 302 света может излучать импульсы с частотой повторения приблизительно от 100 кГц до 5 МГц или с периодом повторения импульсов (т.е. с временным интервалом между соседними импульсами) приблизительно от 200 нс до 10 мкс. Тем не менее, в общем случае источник 302 света может формировать выходной луч 314 с любой подходящей средней оптической мощностью, в зависимости от специфики конкретного применения.
[088] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии источник 302 света может содержать один или несколько лазерных диодов, таких как, лазерный диод Фабри-Перо, лазер на квантовых ямах, лазер с распределенным брэгговским отражателем (DBR), лазер с распределенной обратной связью (DFB) или поверхностно-излучающий лазер с вертикальным резонатором (VCSEL), но нее ограничиваясь ими. Лишь в качестве примера, лазерный диод в источнике 302 света может представлять собой лазерный диод на арсениде алюминия-галлия (AlGaAs), лазерный диод на арсениде индия-галлия (InGaAs), лазерный диод на арсенид-фосфиде индия-галлия (InGaAsP) или любой другой подходящий лазерный диод. Также предполагается, что источник 302 света может содержать один или несколько лазерных диодов, модулируемых током для формирования оптических импульсов.
[089] Согласно настоящей технологии, источник 302 света лидарной системы 300 дополнительно содержит усилитель 390, в частности, в приведенном примере - усилитель 390 на легированном волокне, также показанный на фиг. 3. Волоконный усилитель 390 может быть усилителем на легированном эрбием волокне, где в сердцевину волокна введены ионы эрбия. Импульсный лазер 388 подключен к волоконному усилителю 390 и световые импульсы, излучаемые импульсным лазером 388, принимаются и усиливаются волоконным усилителем 390.
[090] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии волоконный усилитель 390 представляет собой усилитель 390 на легированном волокне, а в некоторых случаях - усилитель 390 на легированном эрбием волокне (EDFA). Для вариантов осуществления лидарной системы 300, реализующей EDFA-усилитель 390, импульсы, излучаемые импульсным лазером 388, усиливаются возбужденными ионами эрбия в сердцевине волокна EDFA-усилителя 390. После излучения результирующего импульса лазерного луча источнику 302 света требуется некоторое время для накачки, также называемое скоростью накачки или частотой накачки, чтобы обеспечить максимальное усиление импульса. Частота накачки определяется скоростью инверсии населенности в легированном волоконном усилителе 390. Как более подробно описано ниже, когда частота импульсов (т.е. скорость, с которой излучаются импульсы) импульсного лазера 388 превышает частоту накачки (инверсии населенности), из-за неполной накачки эрбиевого волоконного усилителя 390 наблюдается снижение мощности импульсов, излучаемых источником 302 света.
[091] Следует отметить, что в соответствии с настоящей технологией длительность импульса представляет собой время, в течение которого лазер излучает, и обычно не изменяется, хотя это может относиться не ко всем вариантам осуществления изобретения. Настоящая технология направлена на управление частотой следования импульсов (также называемой частотой излучения), которая определяется временем между излучением импульсов (т.е. обратно пропорциональна времени между импульсами). Согласно по меньшей мере некоторым не имеющим ограничительного характера вариантам осуществления настоящей технологии, время между импульсами может составлять от 100 нс до 2 мкс. Следует также отметить, что частота следования импульсов и длительность импульсов не обязательно коррелированы, за исключением того, что длительность импульса должна быть меньше интервала времени между импульсами при формировании отдельных импульсов источником 302 света.
[092] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии источник 302 света обычно способен излучать выходной луч 314 в виде коллимированного оптического луча, но предполагается, что полученный луч может иметь любую расходимость, подходящую для данного применения. В целом, расходимость выходного луча 314 является угловой мерой увеличения поперечного размера луча (например, его радиуса или диаметра) по мере распространения выходного луча 314 от источника 302 света или лидарной системы 300. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии выходной луч 314 может иметь практически круглое поперечное сечение.
[093] Также предполагается, что выходной луч 314, излучаемый источником 302 света, может быть неполяризованным или случайно поляризованным, может не иметь определенной или постоянной поляризации (например, поляризация может изменяться со временем) или может иметь определенную поляризацию (например, выходной луч 314 может иметь линейную, эллиптическую или круговую поляризацию).
[094] В по меньшей мере некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии выходной луч 314 и входной луч 316 могут быть по существу соосными. Иными словами, выходной луч 314 и входной луч 316 могут по меньшей мере частично перекрываться или иметь общую ось распространения, при этом входной луч 316 и выходной луч 314 проходят по существу по одному и тому же оптическому пути (но в противоположных направлениях). При этом в других не имеющих ограничительного характера вариантах осуществления настоящей технологии выходной луч 314 и входной луч 316 могут не быть соосными или, иными словами, могут не перекрываться или не иметь общей оси распространения внутри лидарной системы 300 без отступления от существа и объема настоящей технологии.
[095] Следует отметить, что в по меньшей мере некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии источник 302 света может поворачиваться, например, на угол на 360 градусов или меньше вокруг оси вращения (не показана) лидарной системы 300, если лидарная система 300 имеет возможность вращения. Тем не менее, в других вариантах осуществления изобретения источник 302 света может быть неподвижным, даже когда лидарная система 300 имеет возможность вращения, без отступления от существа и объема настоящей технологии.
[096] Светоделительный элемент
[097] Как показано на фиг. 3, дополнительно предусмотрен светоделительный элемент 304, расположенный в корпусе 330. Например, как упоминалось ранее, светоделительный элемент 304 способен направлять выходной луч 314 от источника 302 света к блоку 308 сканирования. Светоделительный элемент 304 также способен направлять входной луч 316, отраженный от объекта 320, к приемному блоку 306 для дальнейшей обработки контроллером 310.
[098] Тем не менее, в соответствии с другими не имеющими ограничительного характера вариантами осуществления настоящей технологии, светоделительный элемент 304 может разделять выходной луч 314 на по меньшей мере две составляющих меньшей интенсивности, в том числе сканирующий луч (отдельно не показан) для сканирования окружающего пространства 250 лидарной системы 300, и опорный луч (отдельно не показан), который далее направляется к приемному блоку 306.
[099] Иными словами, можно сказать, что в этих вариантах осуществления изобретения светоделительный элемент 304 способен делить интенсивность (оптическую мощность) выходного луча 314 между сканирующим лучом и опорным лучом. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии светоделительный элемент 304 может делить интенсивность выходного луча 314 поровну между сканирующим лучом и опорным лучом. В других не имеющих ограничительного характера вариантах осуществления настоящей технологии светоделительный элемент 304 может делить интенсивность выходного луча 314 между сканирующим лучом и опорным лучом с любым заданным коэффициентом деления. Например, светоделительный элемент 304 может использовать до 80% интенсивности выходного луча 314 для формирования сканирующего луча, а оставшуюся часть, составляющую до 20% интенсивности выходного луча 314, использовать для формирования опорного луча. Кроме того, в других не имеющих ограничительного характера вариантах осуществления настоящей технологии светоделительный элемент 304 способен изменять коэффициент деления (например, от 1% до 95% интенсивности выходного луча 314) при формировании сканирующего луча.
[0100] Кроме того, следует отметить, что некоторая часть (например, до 10%) интенсивности выходного луча 314 может поглощаться материалом светоделительного элемента 304, что зависит от его конструкции.
[0101] В зависимости от реализации лидарной системы 300, светоделительный элемент 304 может быть представлен в различной форме, в том числе - как светоделительный элемент на основе стеклянной призмы, светоделительный элемент на основе полупосеребренного зеркала, светоделительный элемент на основе дихроичной зеркальной призмы, волоконнооптический светоделительный элемент и т.п., но не ограничиваясь этим.
[0102] Таким образом, в соответствии с не имеющими ограничительного характера вариантами осуществления настоящей технологии, открытый список регулируемых параметров, связанных со светоделительным элементом 304, на основе его конкретного применения может содержать, например, рабочий диапазон длин волн, который может варьироваться от конечного числа длин волн до расширенного светового спектра (например, от 1200 до 1600 нм), входной угол падения, наличие или отсутствие поляризации и т.п.
[0103] В конкретном не имеющем ограничительного характера примере светоделительный элемент 304 может быть реализован как волоконнооптический светоделительный элемент, выпускаемый компанией OZ Optics Ltd., 219 Westbrook Rd Ottawa, Ontario K0A 1L0 Canada (Канада). Должно быть понятно, что светоделительный элемент 304 может быть реализован в виде любого другого подходящего оборудования.
[0104] Внутренние пути прохождения луча
[0105] Как схематически показано на фиг. 3, лидарная система 300 имеет множество внутренних путей 312 прохождения луча, по которым проходит выходной луч 314 (формируемый источником 302 света) и входной луч 316 (принимаемый из окружающего пространства 250). В частности, свет распространяется по внутренним путям 312 прохождения луча следующим образом: свет от источника 302 света проходит через светоделительный элемент 304 к блоку 308 сканирования, а блок 308 сканирования, в свою очередь, направляет выходной луч 314 наружу в окружающее пространство 250.
[0106] Подобным образом, входной луч 316 следует по множеству внутренних путей 312 прохождения луча к приемному блоку 306. В частности, входной луч 316 направляется блоком 308 сканирования в лидарную систему 300 через светоделительный элемент 304 - к приемному блоку 306. В некоторых вариантах реализации в лидарной системе 300 могут быть предусмотрены пути прохождения луча, направляющие входной луч 316 прямо из окружающего пространства 250 в приемный блок 306 (без прохождения входного луча 316 через блок 308 сканирования).
[0107] Следует отметить, что в различных не имеющих ограничительного характера вариантах осуществления настоящей технологии множество внутренних путей 312 прохождения луча может содержать различные оптические элементы. Например, лидарная система 300 может содержать один или несколько оптических элементов, способных нормировать, корректировать форму, фильтровать, модифицировать, изменять направление выходного луча 314 и/или входного луча 316. Например, лидарная система 300 может содержать по меньшей мере одно из числа линз, зеркал, фильтров (например, полосовых или интерференционных фильтров), оптических волокон, циркуляторов, светоделителей, поляризаторов, поляризационных светоделителей, волновых пластин (например, полуволновых или четвертьволновых пластин), дифракционных элементов, микроэлектромеханических (MEM) элементов, коллиматорных элементов и голографических элементов.
[0108] Предполагается, что в по меньшей мере некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии один и какой-либо другой внутренние пути прохождения луча из множества внутренних путей 312 прохождения луча могут совместно использовать по меньшей мере некоторые общие оптические элементы, но не во всех без исключения вариантах осуществления настоящей технологии.
[0109] Блок сканирования
[0110] В общем случае блок 308 сканирования направляет выходной луч 314 по одному или нескольким направлениям в окружающее пространство 250. Блок 308 сканирования соединен с контроллером 310. Таким образом, контроллер 310 может управлять блоком 308 сканирования, чтобы направлять выходной луч 314 от источника в требуемом направлении и/или в соответствии с заданной характеристикой сканирования. В целом, в контексте данного описания характеристикой сканирования может быть схема или путь, по которому блок 308 сканирования направляет выходной луч 314 во время работы.
[0111] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии контроллер 310 может воздействовать на блок 308 сканирования для сканирования выходным лучом 314 во множестве горизонтальных и/или вертикальных угловых диапазонов. Общий диапазон углов, в котором блок 308 сканирования направляет выходной луч 314, называется здесь полем обзора (FoV, Field of View). Предполагается, что конкретная структура, ориентация и/или угловые диапазоны могут зависеть от конкретной реализации лидарной системы 300. Обычно поле обзора содержит множество интересующих областей (ROI, Region Of Interest), определяемых как часть поля обзора, которая, например, может содержать представляющие интерес объекты. В некоторых вариантах реализации блок 308 сканирования может дополнительно обследовать выбранную интересующую область 325. Интересующей областью 325 лидарной системы 300 может быть площадь, объем, область, угловой диапазон и/или часть (части) окружающего пространства 250, в которой лидарная система 300 может выполнять сканирование и/или осуществлять сбор данных.
[0112] Следует отметить, что местоположение объекта 320 в окружающем пространстве 250 транспортного средства 220 может перекрываться с интересующей областью 325, охватываться интересующей областью 325 или охватывать, по меньшей мере частично, интересующую область 325 лидарной системы 300.
[0113] Следует также отметить, что в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии, блок 308 сканирования способен сканировать выходным лучом 314 по горизонтали и/или по вертикали и, соответственно, исследуемая область 325 лидарной системы 300 может быть ориентирована в горизонтальном направлении и вертикальном направлении. Например, исследуемая область 325 может быть определена углом 45° в горизонтальном направлении и углом 45° в вертикальном направлении. В некоторых вариантах реализации разные оси сканирования могут иметь разную ориентацию.
[0114] В соответствии с настоящей технологией, для сканирования выходным лучом 314 интересующей области 325 блок 308 сканирования содержит пару зеркал (отдельно не показаны), каждое из которых независимо связано с соответствующим гальванометром (отдельно не показан), обеспечивающим управление им. Соответственно, контроллер 310 обеспечивает с помощью соответствующего гальванометра вращение каждого зеркала из пары зеркал вокруг соответствующей связанной с ним одной из взаимно перпендикулярных осей, выполняя сканирование интересующей области 325 согласно заранее заданной характеристике сканирования.
[0115] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии блок 308 сканирования может дополнительно содержать множество других оптических и/или механических элементов для обеспечения сканирования выходным лучом 314. Например, блок 308 сканирования может содержать одно или несколько зеркал, призм, линз, микроэлектромеханических элементов, пьезоэлектрических элементов, оптических волокон, светоделителей, дифракционных элементов, коллиматорных элементов и т.п. Следует отметить, что блок 308 сканирования может также содержать один или несколько дополнительных исполнительных элементов (отдельно не показаны), приводящих в движение по меньшей мере некоторые другие оптические элементы, например, для их вращения, наклона, поворота или углового перемещения вокруг одной или нескольких осей.
[0116] Таким образом, лидарная система 300 может использовать заранее заданную характеристику сканирования для формирования облака точек, практически перекрывающего интересующую область 325 лидарной системы 300. Как более подробно описано ниже, это облако точек лидарной системы 300 может использоваться для визуализации многомерной карты объектов в окружающем пространстве 250 транспортного средства 220.
[0117] Из приведенного ниже описания должно быть понятно, что в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии заранее заданная характеристика сканирования исследуемой области 325 может быть связана с соответствующей частотой сканирования.
[0118] Приемный блок
[0119] Согласно некоторым не имеющим ограничительного характера вариантам осуществления настоящей технологии, приемный блок 306 подключен к контроллеру 310 и может быть реализован множеством способов. В соответствии с настоящей технологией, приемный блок 306 содержит датчик 307, например, фотодетектор, но может содержать фотоприемник, оптический приемник, оптический датчик, детектор, оптический детектор, оптические волокна и т.п., не ограничиваясь ими. Как указано выше, в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии приемный блок 306 может принимать или обнаруживать по меньшей мере часть входного луча 316 и формировать электрический сигнал, соответствующий входному лучу 316. Например, если входной луч 316 представляет собой оптический импульс, приемный блок 306 может формировать импульс электрического тока или напряжения, соответствующий оптическому импульсу, обнаруженному приемным блоком 306.
[0120] Предполагается, что в различных не имеющих ограничительного характера вариантах осуществления настоящей технологии приемный блок 306 может быть реализован с использованием одного или нескольких лавинных фотодиодов (APD, Avalanche PhotoDiode), одного или нескольких однофотонных лавинных диодов (SPAD, Single-Photon Avalanche Diode), одного или нескольких PN-фотодиодов (например, фотодиодной структуры, образованной полупроводником p-типа и полупроводником n-типа), одного или несколько PIN-фотодиодов (например, фотодиодной структуры, образованной нелегированной областью полупроводника с собственной проводимостью, расположенной между областями p-типа и n-типа) и т.п.
[0121] В некоторых не имеющих ограничительного характера вариантах осуществления изобретения приемный блок 306 также может содержать схемотехнические элементы, выполняющие усиление, дискретизацию, фильтрацию сигнала, преобразование формы сигнала, аналого-цифровое преобразование, преобразование времени в цифровой сигнал, обнаружение импульсов, пороговое обнаружение, обнаружение нарастающего фронта, обнаружение спадающего фронта и т.п. Например, приемный блок 306 может содержать электронные элементы, способные преобразовывать принятый фототок (например, ток, создаваемый диодом APD при приеме оптического сигнала) в сигнал напряжения. Приемный блок 306 также может содержать дополнительные схемы для формирования аналогового или цифрового выходного сигнала, соответствующего одной или нескольким характеристикам (например, переднему фронту, заднему фронту, амплитуде, длительности и т.п.) принятого оптического импульса.
[0122] Контроллер
[0123] В зависимости от реализации, контроллер 310 может содержать один или несколько процессоров, специализированную интегральную схему (ASIC, Application-Specific Integrated Circuit), программируемую пользователем логическую матрицу (FPGA, Field-Programmable Gate Array) и/или другие подходящие схемотехнические элементы. Кроме того, контроллер 310 может содержать долговременную машиночитаемую память для хранения команд, выполняемых контроллером 310, а также данных, которые контроллер 310 может формировать на основе сигналов, получаемых от других внутренних элементов лидарной системы 300 и/или выдаваемых другим внутренним элементам лидарной системы 300. Память может содержать энергозависимые элементы (например, ОЗУ) и/или энергонезависимые элементы (например, флэш-память, жесткий диск). Контроллер 310 может формировать данные во время работы и сохранять их в памяти. Например, данные, формируемые контроллером 310, могут быть связаны с точками данных в облаке точек лидарной системы 300.
[0124] Предполагается, что в по меньшей мере некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии контроллер 310 может быть реализован аналогично электронному устройству 210 и/или компьютерной системе 100 без отступления от существа и объема настоящей технологии. В дополнение к сбору данных от приемного блока 306, контроллер 310 также может выдавать управляющие сигналы для источника 302 света и блока 308 сканирования и принимать диагностические данные от них.
[0125] Как указывалось ранее, контроллер 310 подключен к источнику 302 света, блоку 308 сканирования и приемному блоку 306. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии контроллер 310 может принимать электрические запускающие импульсы от источника 302 света, где каждый электрический запускающий импульс соответствует излучению оптического импульса источником 302 света. Контроллер 310 может дополнительно выдавать источнику 302 света команды, управляющий сигнал и/или сигнал запуска, указывающие на то, когда источник 302 света должен формировать оптические импульсы, например, выходной луч 314.
[0126] Лишь в качестве примера, контроллер 310 может выдавать электрический сигнал запуска, представляющий собой электрические импульсы, при этом источник 302 света излучает оптический импульс, представленный оптическим лучом 314, в ответ на каждый электрический импульс электрического сигнала запуска. Также предполагается, что контроллер 310 может обеспечивать регулирование источником 302 света одной или нескольких характеристик выходного луча 314, создаваемого источником 302 света, таких как частота, период, длительность, энергия импульса, пиковая мощность, средняя мощность и длина волны оптических импульсов, но не ограничиваясь ими.
[0127] Согласно настоящей технологии, контроллер 310 способен определять значения «времени пролета» оптического импульса для определения расстояния между лидарной системой 300 и одним или несколькими объектами в интересующей области, как описано ниже. Время пролета основано на информации о времени, связанной (1) с первым моментом времени, когда оптический импульс (например, выходной луч 314) был излучен источником 302 света, и (2) со вторым моментом времени, когда часть оптического импульса (например, входной луч 316) была обнаружена или принята приемным блоком 306. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии первый момент времени может соответствовать моменту формирования контроллером 310 электрического импульса, связанного с оптическим импульсом, а второй момент времени может соответствовать моменту приема контроллером 310 от приемного блока 306 электрического сигнала, сформированного при приеме части оптического импульса из входного луча 316.
[0128] В других не имеющих ограничительного характера вариантах осуществления настоящей технологии, где светоделительный элемент 304 может разделять выходной луч 314 на сканирующий луч (не показан) и опорный луч (не показан), первый момент времени может быть моментом приема от приемного блока 306 первого электрического сигнала, сформированного в ответ на прием части опорного луча. Соответственно, в этих вариантах осуществления изобретения второй момент времени может быть определен как момент приема контроллером 310 от приемного блока 306 второго электрического сигнала, сформированного в ответ на прием другой части оптического импульса из входного луча 316.
[0129] В соответствии с настоящей технологией, контроллер 310 способен определять на основе первого и второго моментов времени значения времени пролета и/или величину фазового сдвига для излучаемого импульса выходного луча 314. Значение времени T пролета, в определенном смысле, является временем прохождения «туда и обратно» излучаемого импульса от лидарной системы 300 до объекта 320 и обратно до лидарной системы 300. Таким образом, контроллер 310 способен ориентировочно определять расстояние 318 по следующей формуле:
где D - расстояние 318, T - время пролета, c - скорость света (приблизительно 3,0×108 м/с).
[0130] Как было указано ранее, лидарная система 300 может использоваться для определения расстояния 318 до одного или нескольких других потенциальных объектов, расположенных в окружающем пространстве 250. Выполняя сканирование выходным лучом 314 интересующей области 325 лидарной системы 300 в соответствии с заданной характеристикой сканирования, контроллер 310 способен отображать расстояние (подобно расстоянию 318) до соответствующих точек данных в интересующей области 325 лидарной системы 300. В результате контроллер 310 обычно может визуализировать эти поочередно получаемые точки данных (например, облака точек), в виде многомерной карты. В некоторых вариантах реализации данные, связанные с определенным временем пролета и/или с расстоянием до объекта, могут отображаться в разном информационном формате.
[0131] Например, эта многомерная карта может использоваться электронным устройством 210 для обнаружения или иного рода идентификации объектов либо для определения формы или расстояния до потенциальных объектов в интересующей области 325 лидарной системы 300. Предполагается, что лидарная система 300 может многократно или итеративно получать и/или формировать облака точек с любой скоростью, пригодной для данного применения.
[0132] Способ управления системой
[0133] Ниже более подробно описана приведенная на фиг. 4 блок-схема способа 400 для управления лидарной системой 300 в соответствии с не имеющими ограничительного характера вариантами осуществления настоящей технологии.
[0134] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии способ 400 может быть реализован контроллером 310, подключенным к лидарной системе 300. Как было указано выше, в по меньшей мере некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии контроллер 310 может содержать один или несколько процессоров и может быть реализован аналогично электронному устройству 210 и/или компьютерной системе 100 без отступления от существа и объема настоящей технологии. Реализация способа 400 начинается на шаге 410.
[0135] Шаг 410: воздействие на источник света для излучения импульсов света с первой частотой следования импульсов.
[0136] На шаге 410 контроллер 310 выдает источнику 302 света команды, управляющий сигнал и/или сигнал запуска, указывающие на то, когда источник 302 света должен излучать импульсы света в направлении блока 308 сканирования с первой частотой следования импульсов. Как было упомянуто выше, частота следования импульсов представляет собой скорость или частоту, с которой импульсы излучаются источником 302 света.
[0137] Когда начинается выполнение способа 400, первая частота следования импульсов обычно одинакова для разных частей поля обзора и меньше (медленнее) частоты накачки волоконного усилителя 390. Таким образом, для каждого импульса выборки обеспечивается требуемое максимальное усиление на выходе волоконного усилителя 390. В некоторых не имеющих ограничительного характера вариантах реализации способа предполагается, что выборки из разных частей поля обзора могут поступать с разной частотой по причинам, выходящим за рамки настоящей технологии. Для простоты объяснения при описании способа 400 в данном документе предполагается, что никакие другие методы работы не используются одновременно с ним для управления лидарной системой 300, хотя предполагается, что настоящий способ 400 может выполняться в дополнение к другим способам работы и/или одновременно с ними.
[0138] При выполнении одного или нескольких шагов способа 400 контроллер 310 может обеспечивать начало излучения источником 302 света выходного луча 314 в направлении блока 308 сканирования при определенных условиях. Такие условия могут включать в себя работу транспортного средства 220 в самоуправляемом режиме, управление транспортным средством 220 в движении, независимо от режима управления движением, управление неподвижным транспортным средством 220, управление при начальном запуске транспортного средства 220, ручное управление транспортным средством 220, выполняемое пользователем (не показан) и т.д., но не ограничиваясь этим.
[0139] Шаг 420: направление импульсов света из системы.
[0140] На шаге 420 контроллер 310 выдает команды, управляющий сигнал и/или сигнал запуска, по которым блок 308 сканирования должен направлять световые импульсы выходного луча 314 наружу из лидарной системы 300. В зависимости от конкретного варианта осуществления изобретения, эти импульсы сканируют часть или все поле обзора лидарной системы 300 для формирования трехмерных карт окружающего пространства, попадающего в поле обзора.
[0141] Шаг 430: обнаружение светового сигнала, отраженного от по меньшей мере одного объекта в поле обзора системы.
[0142] На шаге 430 отраженный свет из поля обзора лидарной системы 300 принимается датчиком 307 приемного блока 306. Затем контроллер 310 принимает сигнал и/или информацию, соответствующую одному или нескольким отраженным световым сигналам, принятым датчиком 307. Как описано выше, входной луч 316 поступает в лидарную систему 300 из поля обзора и направляется элементами лидарной системы 300 к датчику 307 и к приемному блоку 306.
[0143] В по меньшей мере некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии прием на шаге 430 может включать в себя обнаружение множества световых сигналов, отраженных от одной или нескольких интересующих областей в поле обзора.
[0144] Шаг 440: определение отношения сигнал/шум отраженного светового сигнала.
[0145] На шаге 440 контроллер 310 определяет или вычисляет отношение сигнал/шум отраженного сигнала, принятого датчиком 307 приемного блока 306. Отношение сигнал/шум вычисляется путем деления ранее определенной мощности сигнала на уровень мощности фонового шума. В зависимости от варианта осуществления изобретения, уровень фонового шума может определяться различными способами. Согласно одному не имеющему ограничительного характера варианту осуществления изобретения, уровень фонового шума может определяться путем приема или измерения уровня сигнала от датчика 307 в то время, когда входной луч 316 еще не достиг датчика 307. В по меньшей мере некоторых не имеющих ограничительного характера вариантах осуществления изобретения уровень фонового шума может быть определен путем установки затвора перед датчиком 307 для периодической блокировки входного луча 316 и измерения сигнала датчика 307 во время блокировки затвором входного луча 316. В зависимости от реализации способа, уровень фонового шума может определяться эпизодически или с постоянной частотой.
[0146] В по меньшей мере некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии контроллер 310 может определять отношение сигнал/шум части отраженного сигнала, принятого датчиком 307, соответствующей интересующей области (ROI) в поле обзора. В зависимости от варианта осуществления изобретения, отдельные значения отношения сигнал/шум для одной или нескольких интересующих областей могут определяться контроллером 310 одновременно и/или поочередно. Например, разные значения отношения сигнал/шум для разных частей поля обзора могут определяться в одном цикле сканирования. В другом не имеющем ограничительного характера примере контроллер 310 может определять отношение сигнал/шум для разных частей поля обзора в разных циклах сканирования поля обзора.
[0147] Шаг 450: определение разности между отношением сигнал/шум и пороговым отношением сигнал/шум.
[0148] На этапе 450 контроллер 310 определяет разность между отношением сигнал/шум и пороговым отношением сигнал/шум. Определив отношение сигнал/шум на шаге 440, контроллер сравнивает его с пороговым отношением сигнал/шум, чтобы определить относительный уровень сигнала входного луча 316. В по меньшей мере некоторых не имеющих ограничительного характера вариантах осуществления изобретения определение этой разности может включать в себя определение абсолютной величины и знака разности между отношением сигнал/шум и пороговым значением. В по меньшей мере некоторых не имеющих ограничительного характера вариантах осуществления изобретения может определяться факт превышения порогового значения величиной отношения сигнал/шум.
[0149] В по меньшей мере некоторых не имеющих ограничительного характера вариантах осуществления изобретения пороговое отношение сигнал/шум, в общем случае, является минимально допустимым значением отношения сигнал/шум, ниже которого шум влияет на качество сигнала. В по меньшей мере некоторых не имеющих ограничительного характера вариантах осуществления изобретения пороговое отношение сигнал/шум может быть минимальным приемлемым значением, тем не менее, при некоторых меньших значениях такое отношение сигнал/шум все же может обеспечивать сбор достоверных данных. В по меньшей мере некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии пороговое отношение сигнал/шум представляет собой заранее заданное значение, хранящееся в контроллере 310, тем не менее, оно также может храниться в электронном устройстве 210 и/или в компьютерной системе 100 без отступления от существа и объема настоящей технологии. Также предполагается, что это порог может быть вычислен контроллером 310 (или электронным устройством 210 и/или компьютерной системой 100) в зависимости от переменных лидарной системы 300, включая условия окружающей среды и/или погодные условия, уровень естественного и искусственного освещения, требуемую дальность (требуемую текущую дальность излучения), текущую скорость и дорожные условия, но не ограничиваясь ими.
[0150] Шаг 460: воздействие на основе упомянутой разности на источник света для излучения импульсов света со второй частотой следования импульсов, отличной от первой частоты следования импульсов.
[0151] На шаге 460 контроллер 310 на основе упомянутой разности воздействует на источник света для излучения импульсов света со второй частотой следования импульсов, отличной от первой частоты следования импульсов.
[0152] В по меньшей мере некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии контроллер 310 может обеспечивать изменение источником 302 света частоты следования импульсов выходного луча 314 при любой ненулевой разности между отношением сигнал/шум, определенным на шаге 450, и пороговым значением. В по меньшей мере некоторых других не имеющих ограничительного характера вариантах осуществления изобретения контроллер 310 может обеспечивать изменение источником 302 света частоты следования импульсов выходного луча 314, если разность между пороговым значением и определенным отношением сигнал/шум превышает минимальное значение разности. В качестве одного не имеющего ограничительного характера примера, источник 302 света может изменять частоту следования импульсов, если определенное отношение сигнал/шум по меньшей мере вдвое превышает пороговое значение отношение сигнал/шум.
[0153] На одном или нескольких не имеющих ограничительного значения шагах способа 400 контроллер 310 может определять факт превышения величиной отношения сигнал/шум порогового отношения сигнал/шум. В таком случае частота следования импульсов источника 302 света может быть увеличена так, чтобы вторая частота следования импульсов была больше (быстрее) первой частоты следования импульсов. В по меньшей мере некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии вторая частота следования импульсов может быть больше частоты накачки источника 302 света, в частности, частоты накачки волоконного усилителя 390. Как упомянуто выше, мощность выходного луча 314 обычно уменьшается («спад мощности») в случаях, когда частота следования импульсов выходного луча 314 больше частоты накачки усилителя 390. Если на шаге 450 определено, что отношение сигнал/шум превышает пороговое значение, то считается, что при уменьшении мощности выходного луча 314 отношение сигнал/шум должно оставаться достаточно высоким для формирования требуемой трехмерной карты. Иными словами, частота следования импульсов выходного луча 314 может быть увеличена для создания более подробной трехмерной карты при сохранении по меньшей мере минимального значения отношения сигнал/шум. Таким образом, пространственное разрешение (определяемое частотой следования импульсов) может быть улучшено для всего поля обзора или его части, в которой качество сигнала достаточно высоко и допустимо некоторое его снижение (до уровня не ниже минимально допустимого качества сигнала).
[0154] В по меньшей мере некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии способ 400 дополнительно включает в себя определение второго отношения сигнал/шум при формировании источником 302 света выходного луча 314 со второй частотой следования импульсов после предыдущих измерений отношения сигнал/шум. Способы определения второго отношения сигнал/шум могут совпадать или отличаться от тех, что используются для определения начального отношения сигнал/шум, в зависимости от конкретной реализации.
[0155] В по меньшей мере некоторых таких не имеющих ограничительного характера вариантах осуществления изобретения способ 400 может дополнительно включать в себя определение контроллером 310 того, что второе отношение сигнал/шум меньше порогового отношения сигнал/шум. В этом случае контроллер 310 может воздействовать на источник 302 света для излучения импульсов света с третьей частотой следования импульсов, отличной от второй частоты следования импульсов. В качестве одного не имеющего ограничительного характера примера, третья частота следования импульсов может быть меньше второй частоты следования импульсов, при этом усилитель 390 будет иметь больше времени для накачки усилителя 390, чтобы увеличить мощность выходного луча 314 и способствовать восстановлению требуемого уровня отношения сигнал/шум. В некоторых случаях третья частота следования импульсов равна первой частоте следования импульсов, т.е. выходной луч 314 формируется с той же частотой следования импульсов, что и первоначально. В некоторых других не имеющих ограничительного характера вариантах осуществления изобретения предполагается, что третья частота следования импульсов может быть больше или меньше первой частоты, в зависимости от различных факторов в лидарной системе 300 или ее конкретной реализации.
[0156] В по меньшей мере некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии определение отношения сигнал/шум отраженного светового сигнала на шаге 440 включает в себя определение контроллером 310 значений отношения сигнал/шум для одной или нескольких подзон (отношения сигнал/шум подзон), при этом отношение сигнал/шум подзоны соответствует отношению сигнал/шум части отраженного сигнала, поступающего из интересующей области в пределах поля обзора лидарной системы 300. В таком варианте осуществления изобретения способ 400 может включать в себя определение на шаге 450 разности между отношением сигнал/шум одной или нескольких подзон и пороговым отношением сигнал/шум. В по меньшей мере некоторых таких не имеющих ограничительного характера вариантах осуществления изобретения контроллер 310 может определять, что отношение сигнал/шум для некоторой подзоны больше порогового отношения сигнал-шум, и воздействовать на источник 302 света для излучения импульсов света со второй частотой следования импульсов при сканировании интересующей области, для которой определено отношение сигнал/шум подзоны. В некоторых случаях контроллер 310 может определять, что отношение сигнал/шум множества подзон превышает пороговое значение, и воздействовать на источник 302 света для излучения импульсов света со второй частотой следования импульсов при сканировании соответствующих интересующих областей. В по меньшей мере некоторых таких не имеющих ограничительного характера вариантах осуществления изобретения также предполагается, что контроллер 310 может воздействовать на источник 302 света для излучения импульсов света с разными частотами следования импульсов при сканировании разных интересующих областей, в зависимости от разности между отношением сигнал/шум в каждой подзоне и пороговым значением.
[0157] В по меньшей мере некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии способ 400 может дополнительно включать в себя воздействие контроллером 310 на источник 302 света с целью возвращения к первой частоте следования импульсов для одной или нескольких интересующих областей, одной или нескольких подзон и/или всего поля обзора через некоторый период времени. В по меньшей мере некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии способ 400 может дополнительно включать в себя воздействие на источник 302 света с целью возвращения к первой частоте следования импульсов после определения снижения качества 3D-карты согласно методам, выходящим за границы настоящей технологии.
[0158] Специалистам в данной области техники должно быть понятно, что по меньшей мере некоторые варианты осуществления настоящей технологии направлены на расширение арсенала технических средств для решения конкретной технической проблемы, а именно, улучшения качества пространственной локализации объектов лидарной системой с ограничением влияния качества сигнала.
[0159] Для специалиста в данной области могут быть очевидными возможные изменения и усовершенствования описанных выше вариантов осуществления настоящей технологии. Предшествующее описание приведено лишь в иллюстративных целях, а не для ограничения объема изобретения. Объем охраны настоящей технологии определяется исключительно объемом приложенной формулы изобретения.
[0160] Несмотря на то, что выше описаны варианты реализации изобретения с указанием конкретных шагов, выполняемых в конкретном порядке, должно быть понятно, что некоторые из этих шагов могут быть объединены, разделены на части или переупорядочены без отступления от существа и объема настоящей технологии. Соответственно, порядок выполнения и группирование этих шагов не являются ограничением настоящей технологии.
| название | год | авторы | номер документа |
|---|---|---|---|
| Лидарная система и способ с когерентным детектированием | 2020 |
|
RU2792949C2 |
| ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ С ВЫБОРОЧНЫМ СКАНИРОВАНИЕМ | 2020 |
|
RU2792951C2 |
| МУЛЬТИСПЕКТРАЛЬНЫЕ ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ | 2020 |
|
RU2792948C2 |
| Лидарные системы и способы | 2020 |
|
RU2798364C2 |
| Лидарные системы и способы | 2020 |
|
RU2798363C2 |
| ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ | 2020 |
|
RU2789827C2 |
| ЛИДАРНАЯ СИСТЕМА И СПОСОБ КАЛИБРОВКИ ЛИДАРНОЙ СИСТЕМЫ | 2021 |
|
RU2829088C1 |
| ЛИДАРНАЯ СИСТЕМА И СПОСОБ КАЛИБРОВКИ ЛИДАРНОЙ СИСТЕМЫ | 2021 |
|
RU2829904C1 |
| СПОСОБ И СЕРВЕР ДЛЯ ОБНОВЛЕНИЯ ПРЕДСТАВЛЕНИЯ КАРТЫ | 2024 |
|
RU2836391C1 |
| СКАНЕР ДЛЯ ЛИДАРНОЙ СИСТЕМЫ, ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ С ИСПОЛЬЗОВАНИЕМ СКАНЕРА | 2020 |
|
RU2781619C2 |
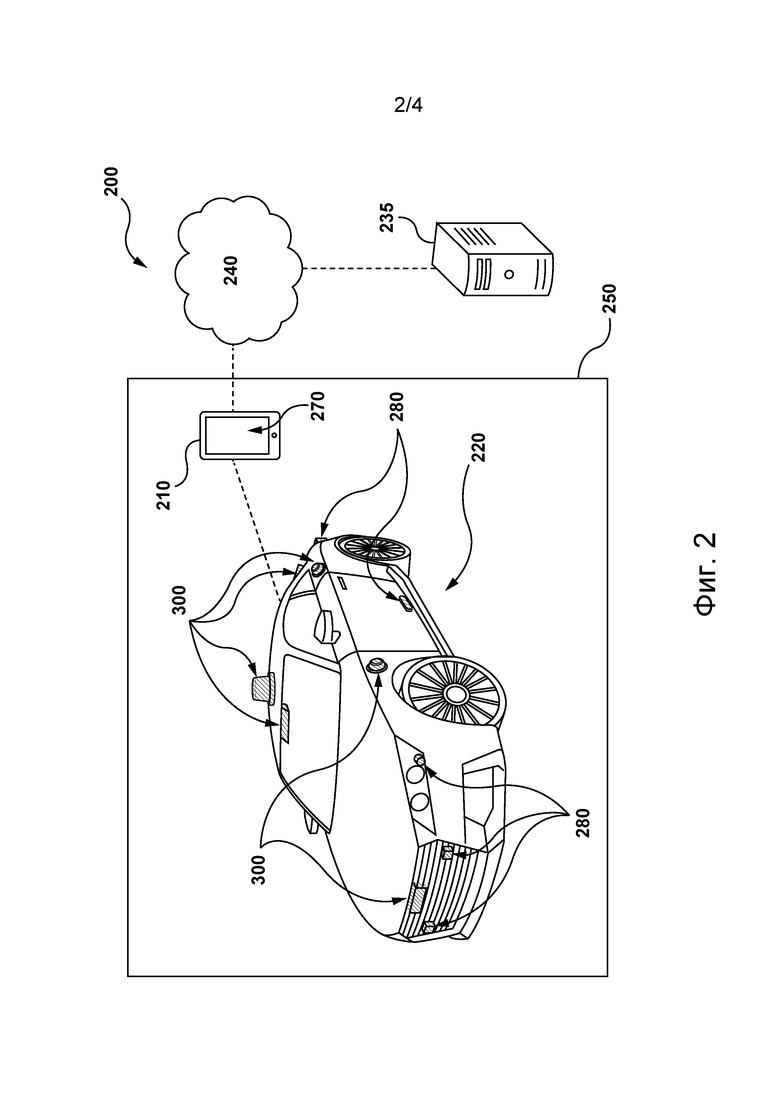
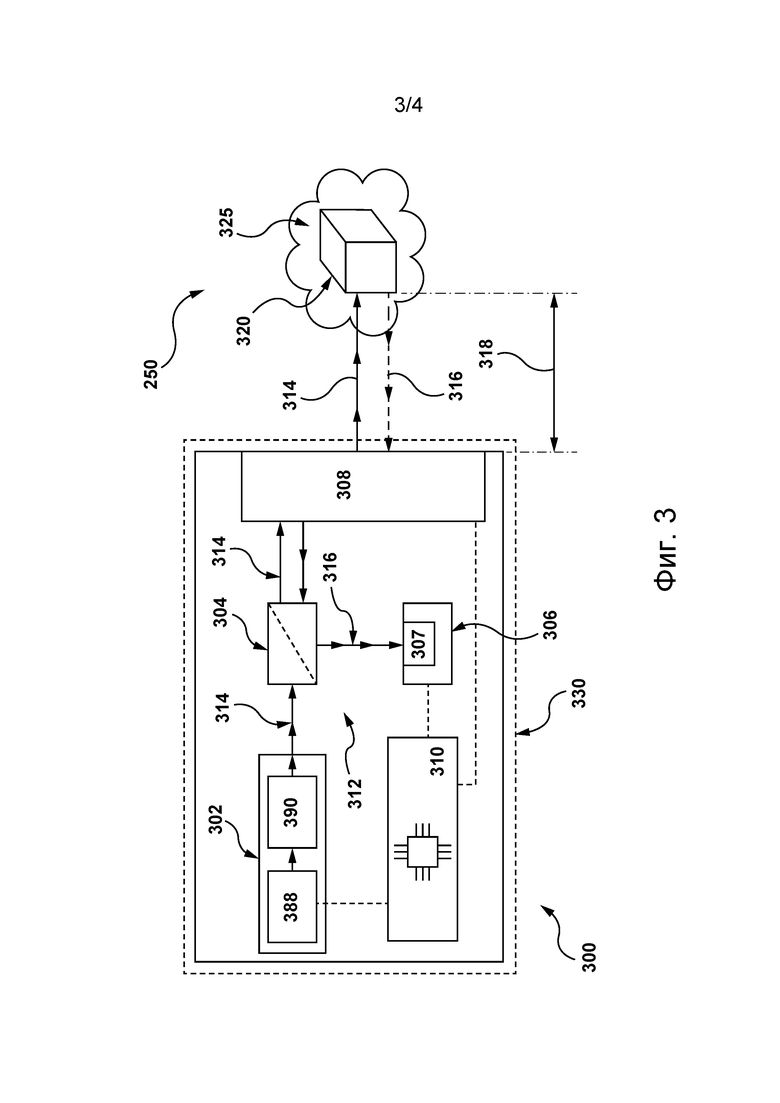
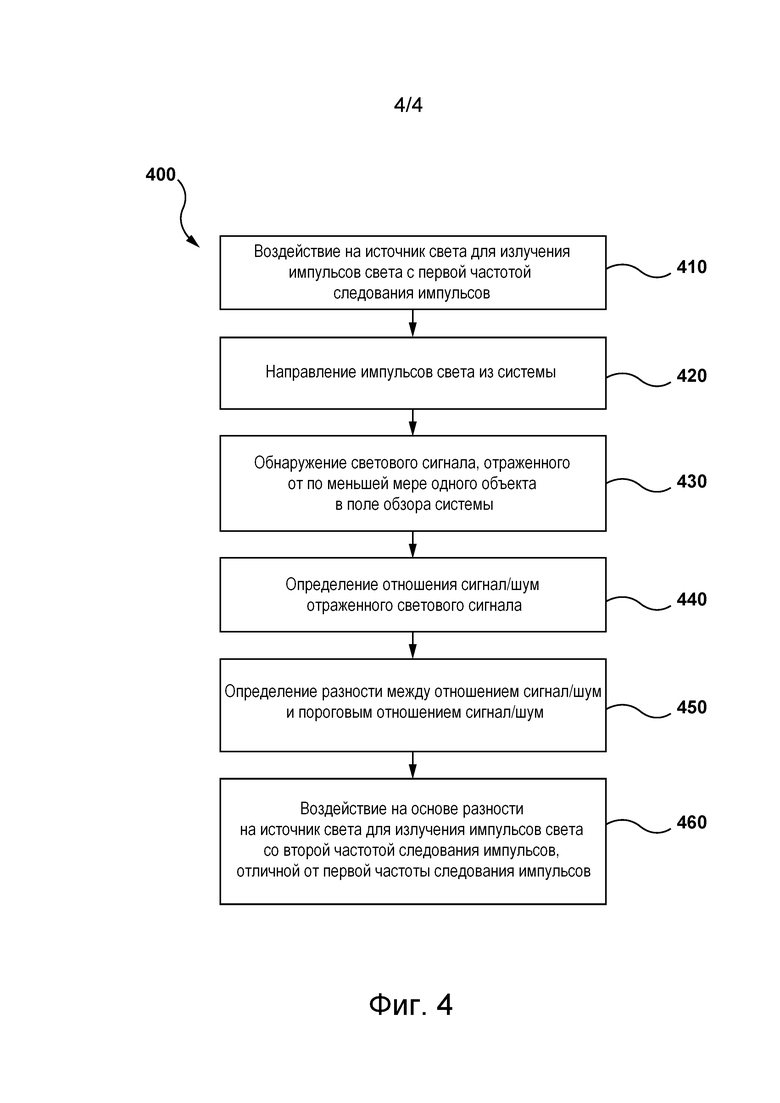
Использование: настоящая технология в целом относится к световым системам обнаружения и измерения дальности (LiDAR, Light Detection and Ranging,) и в частности - к способам и системам выборочного сканирования объектов в интересующих областях. Сущность: лидарная система и способ управления оптической системой предполагают воздействие контроллером на источник света для излучения импульсов света с первой частотой следования импульсов, направление импульсов света сканирующим устройством, подключенным к контроллеру, из оптической системы, обнаружение по меньшей мере одним датчиком, подключенным к контроллеру, светового сигнала, отраженного от по меньшей мере одного объекта в поле обзора оптической системы, определение контроллером отношения сигнал-шум отраженного светового сигнала, определение контроллером разности между отношением сигнал/шум и пороговым отношением сигнал-шум и воздействие контроллером на источник света для излучения, импульсов света со второй частотой следования импульсов, отличной от первой частоты следования импульсов, на основе этой разности. Технический результат: улучшение качества пространственной локализации объектов лидарной системой с ограничением влияния качества сигнала. 4 н. и 8 з.п. ф-лы, 4 ил.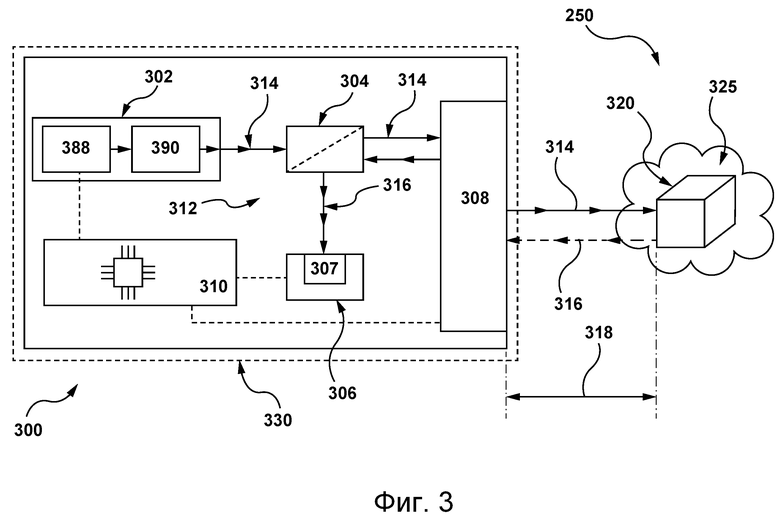
1. Способ управления лазерной системой обнаружения и измерения дальности, включающий в себя:
- воздействие контроллером на источник света для излучения импульсов света с первой частотой следования импульсов;
- направление блоком сканирования, подключенным к контроллеру, импульсов света из оптической системы;
- обнаружение по меньшей мере одним датчиком, подключенным к контроллеру, светового сигнала, отраженного от по меньшей мере одного объекта в поле обзора оптической системы;
- определение контроллером отношения сигнал/шум отраженного светового сигнала;
- определение контроллером разности между отношением сигнал/шум и пороговым отношением сигнал/шум, причем отношение сигнал/шум превышает пороговое отношение сигнал/шум;
- воздействие контроллером на источник света для излучения импульсов света со второй частотой следования импульсов, отличной от первой частоты следования импульсов, на основе этой разности, при этом вторая частота следования импульсов больше первой частоты следования импульсов, и
вторая частота следования импульсов больше частоты накачки источника света.
2. Способ по п. 1, в котором отношение сигнал/шум является первым отношением сигнал/шум и который дополнительно включает в себя:
- определение контроллером второго отношения сигнал/шум после его воздействия на источник света для излучения импульсов света со второй частотой следования импульсов;
- определение контроллером того, что второе отношение сигнал/шум меньше порогового отношения сигнал/шум; и
- воздействия контроллером на источник света для излучения импульсов света с третьей частотой следования импульсов, отличной от второй частоты следования импульсов.
3. Способ по п. 2, в котором третья частота следования импульсов равна первой частоте следования импульсов.
4. Способ по п. 1, в котором определение отношения сигнал/шум отраженного светового сигнала включает в себя определение контроллером отношения сигнал/шум подзоны, соответствующего отношению сигнал/шум части отраженного сигнала, поступающего из интересующей области в поле обзора, при этом:
- определение разности между пороговым отношением сигнал/шум и отношением сигнал/шум включает в себя определение контроллером того, что отношение сигнал/шум подзоны больше порогового отношения сигнал/шум; и
- воздействие контроллером на источник света для излучения импульсов света со второй частотой следования импульсов включает в себя воздействие контроллером на источник света для излучения импульсов света со второй частотой следования импульсов при сканировании интересующей области, если отношение сигнал/шум подзоны превышает пороговое отношение сигнал/шум.
5. Способ по п. 4, в котором:
- определение отношения сигнал/шум подзоны включает в себя определение контроллером множества отношений сигнал/шум подзоны для множества интересующих областей;
- определение того, что отношение сигнал/шум подзоны больше порогового отношения сигнал/шум, включает в себя определение того, что по меньшей мере одно отношение сигнал/шум подзоны из множества отношений сигнал/шум подзоны больше порогового отношения сигнал/шум, при этом по меньшей мере одно отношение сигнал/шум подзоны соответствует сигналам, принятым в интересующей области из множества интересующих областей; и
- если по меньшей мере на одно отношение сигнал/шум превышает пороговое отношение сигнал-шум, контроллер воздействует на источник света для излучения импульсов света со второй частотой следования импульсов при сканировании интересующей области.
6. Способ управления лазерной системой обнаружения и измерения дальности, включающий в себя:
- воздействие контроллером на источник света для излучения импульсов света с первой частотой следования импульсов;
- направление блоком сканирования, подключенным к контроллеру, импульсов света из оптической системы;
- обнаружение по меньшей мере одним датчиком, подключенным к контроллеру, множества световых сигналов, отраженных в поле обзора оптической системы, состоящего из множества интересующих областей;
- управление контроллером источником света, по меньшей мере частично, на основе множества отраженных световых сигналов,
при этом управление для интересующей области включает в себя:
- определение контроллером отношения сигнал/шум отраженного светового сигнала интересующей области;
- определение контроллером разности между отношением сигнал/шум и пороговым отношением сигнал/шум; и
- воздействие контроллером на источник света для излучения импульсов света со второй частотой следования импульсов, отличной от первой частоты следования импульсов, на основе этой разности при сканировании интересующей области, причем
отношение сигнал/шум больше порогового отношения сигнал/шум, а вторая частота следования импульсов больше первой частоты следования импульсов.
7. Способ по п. 6, в котором интересующая область является первой интересующей областью, отношение сигнал/шум является первым отношением сигнал/шум, а для второй интересующей области способ дополнительно включает в себя:
- определение контроллером второго отношения сигнал/шум отраженного светового сигнала второй интересующей области;
- определение контроллером разности между отношением сигнал/шум и пороговым отношением сигнал/шум; и
- воздействие контроллером на источник света для излучения импульсов света с третьей частотой следования импульсов, отличной от первой частоты следования импульсов, на основе этой разности при сканировании второй интересующей области.
8. Способ по п. 7, в котором третья частота следования импульсов равна второй частоте следования импульсов.
9. Лидарная система, содержащая:
- источник света;
- блок сканирования, способный направлять импульсы света от источника света;
- приемный блок, способный принимать свет, отраженный от объектов окружающего пространства, и содержащий по меньшей мере один датчик;
- контроллер, подключенный по меньшей мере к блоку сканирования и к приемному блоку и способный выполнять хранящиеся в нем команды, включая:
- воздействие контроллером на источник света для излучения импульсов света с первой частотой следования импульсов;
- направление блоком сканирования, подключенным к контроллеру, импульсов света из оптической системы;
- обнаружение по меньшей мере одним датчиком, подключенным к контроллеру, светового сигнала, отраженного от по меньшей мере одного объекта в поле обзора оптической системы;
- определение контроллером отношения сигнал/шум отраженного светового сигнала;
- определение контроллером разности между отношением сигнал/шум и пороговым отношением сигнал/шум; и
- воздействие контроллером на источник света для излучения импульсов света со второй частотой следования импульсов, отличной от первой частоты следования импульсов, на основе этой разности, при этом
вторая частота следования импульсов больше первой частоты следования импульсов.
10. Система по п. 9, в которой источник света содержит лазер, подключенный к контроллеру, и усилитель на легированном волокне.
11. Система по п. 9, в которой вторая частота следования импульсов больше первой частоты следования импульсов и больше частоты накачки усилителя на легированном волокне.
12. Лидарная система, содержащая:
- источник света;
- блок сканирования, способный направлять импульсы света от источника света;
- приемный блок, способный принимать свет, отраженный от объектов окружающего пространства и содержащий по меньшей мере один датчик; и
- контроллер, подключенный по меньшей мере к блоку сканирования и к приемному блоку и способный выполнять способ по п. 6.
| WO 2018055449 A2, 29.03.2018 | |||
| CN 110031823 B, 24.03.2020 | |||
| US 20110007299 A1, 13.01.2011 | |||
| US 20200278431 A1, 03.09.2020 | |||
| KR 102086026 B1, 06.03.2020 | |||
| ИЗМЕРИТЕЛЬ ФАЗОВЫХ ШУМОВ УЗКОПОЛОСНЫХ ЛАЗЕРОВ, ОСНОВАННЫЙ НА СОСТОЯЩЕМ ИЗ РМ-ВОЛОКНА ИНТЕРФЕРОМЕТРЕ МАХА-ЦЕНДЕРА | 2017 |
|
RU2664692C1 |

