Изобретение относится к области оснащения надводных кораблей аппаратурой и может быть применено при вооружении надводных кораблей (НК).
Анализ мировых тенденций развития в различных отраслях военной техники - ракетостроении, авиации, кораблестроении, танкостроении, ПВО и ряде других - показывает, что одним из основных и стремительно развивающихся направлений является интеграция средств обнаружения целей и средств их поражения.
Так, известна интегрированная система боевого управления нижней полусферы надводного корабля, содержащая различные гидроакустические и неакустические станции, интегрирующее звено и звено анализа тактической обстановки и выработки рекомендации [Охрименко С.Н., Паршуков В.Н., Рубанов И.Л., Сергиенко М.М. Интегрированная система боевого управления нижней полусферы надводного корабля - дальнейшее развитие интегрированных систем подводного наблюдения // Гидроакустика. - 2017. - №31(3). - с. 62-63].
Известна интегрированная система боевого управления нижней полусферы надводного корабля (НК), содержащая гидроакустический канал с расположенной в носовом обтекателе цилиндрической антенной, гидроакустический канал с гибкой протяженной буксируемой антенной, канал обработки информации от радиогидроакустических буев, систему управления противолодочным оружием (ПЛО), а также пульты управления гидроакустическими каналами, пульт управления противолодочным оружием и пульт отображения и анализа информации [Модернизация ГАК AN/SQQ-89 ВМС США (http:pentagonus.ru/publ/36-l-O-391) Дата обращения 10.03.2022; Корякин Ю.А., Смирнов С.А., Яковлев Г.В. Корабельная гидроакустическая техника. Состояние и актуальные проблемы. С-Пб. Наука. - 2004 - с. 297-298; Пичугин С.Состояние и перспективы развития систем гидроакустического наблюдения ВМС США // Зарубежное военное обозрение. - 2010. - №6. - с. 61-70].
Известная интегрированная система боевого управления нижней полусферы надводного корабля AN/SQQ-89 наиболее близка к предлагаемому устройству по технической сущности и вследствии этого принята за прототип.
Недостатком известного устройства является невозможность интегрированной системы боевого управления нижней полусферы надводного корабля управлять маневрированием НК.
Действительно, известно, что маневрирование наблюдателя (в нашем случае НК) относительно цели позволяет оптимизировать (сократить) время поиска и занятия позиции для применения средств поражения (в нашем случае ПЛО) [Абчук В.А., Матвейчук Ф.А., Томашевский Л.П. Справочник по исследованию операций. - М. - Воениздат.- 1979. - с. 214-255].
Последнее приводит к целесообразности в системе боевого управления нижней полусферы надводного корабля интеграции не только средств обнаружения целей и средств их уничтожения, но и средств маневрирования НК.
Задачей изобретения является обеспечение возможности интегрированной системы боевого управления нижней полусферы надводного корабля маневрированием НК.
Техническим результатом является повышение эффективности интегрированной системы боевого управления нижней полусферы надводного корабля как комплексной боевой системы.
Для достижения указанного технического результата в известную интегрированную систему боевого управления нижней полусферы надводного корабля (НК), содержащую гидроакустический канал с расположенной в носовом обтекателе цилиндрической антенной, гидроакустический канал с гибкой протяженной буксируемой антенной, канал обработки информации от радиогидроакустических буев, каждый из которых соединен соответственно с первым, вторым и третьим пультом управления гидроакустическим каналом, а также систему управления противолодочным оружием (ПЛО), соединенную с пультом управления противолодочным оружием, и пульт отображения и анализа информации, входы которого соединены с выходами всех пультов управления, введены новые признаки, а именно: в ее состав введен пульт управления маневрированием надводного корабля, содержащий последовательно соединенные систему обмена информации, блок трассового анализа и прогноза местоположения цели, блок определения области занятия позиции для применения ПЛО, блок прокладки курса, блок управления системой маневрирования надводного корабля, а также содержащий устройство памяти, соединенное первой двусторонней связью с системой обмена информацией, также содержащий первый второй и третий блоки отображения, входы которых соединены со вторыми выходами блока трассового анализа, блока определения области занятия позиции для применения ПЛО и блока прокладки курса соответственно, вторые входы которых соединены соответственно с первым, вторым и третьим выходами блока знаний, соединенного второй двусторонней связью с системой обмена информации, также содержащий пульт оператора, выход которого соединен со вторым входом блока управления системой маневрирования НК, выход которого соединен с системой маневрирования НК, а вход системы обмена информации соединен с пультом отображения и анализа информации
Наилучшие результаты достигаются, если: - блоки отображения, блок управления системой маневрирования надводного корабля и пульт оператора объединены в единый пользовательский терминал оператора, что облегчает работу оператора вследствие улучшения эргономики его рабочего места;
- выход блока управления системой управления маневрированием надводного корабля содержит канал управления рулевыми и подруливающими устройствами и канал управления движителем НК.
Принятая в интегрированной системе боевого управления нижней полусферы надводного корабля многоуровневая обработка информации позволяет осуществлять контроль процесса проведения поисково-следящей операции по поиску, обнаружению и применения ПЛО по цели на всех ее уровнях.
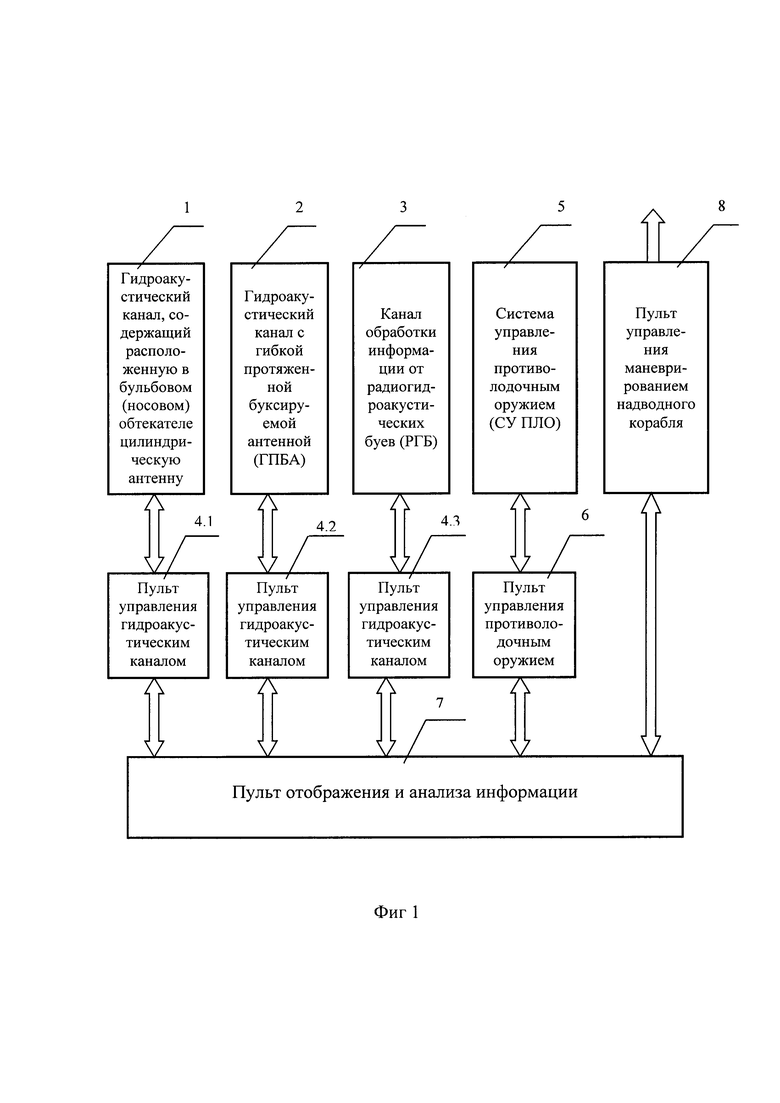
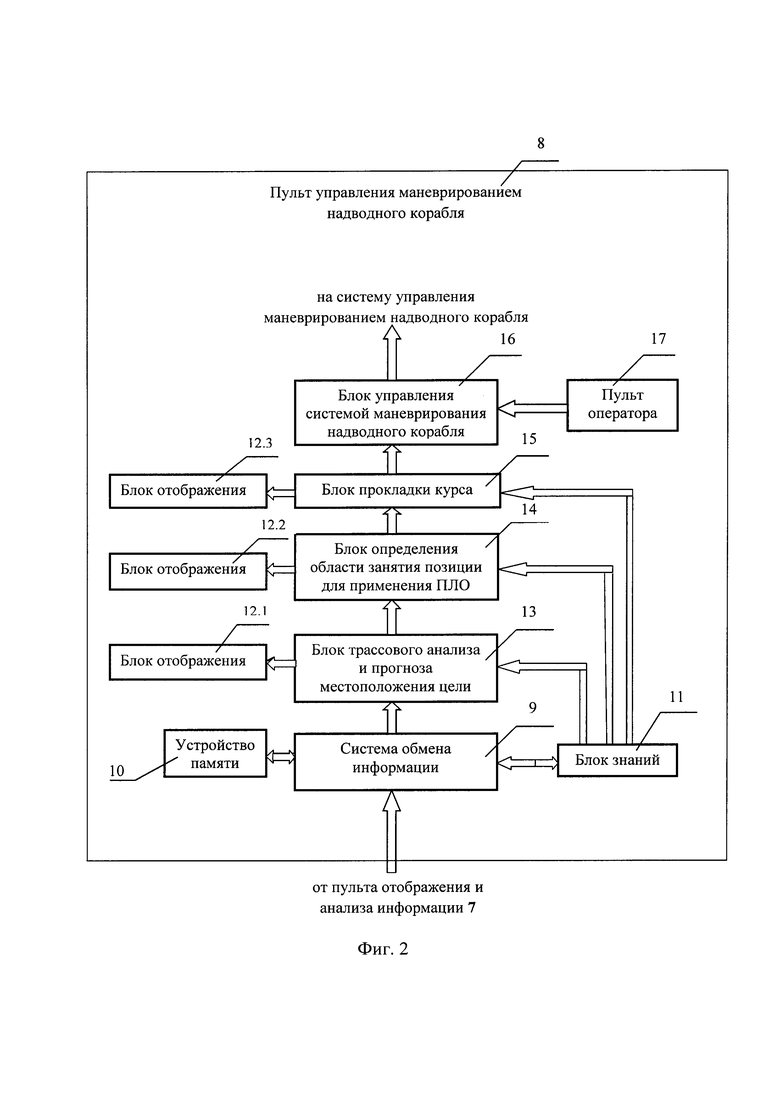
Сущность изобретения поясняется Фиг. 1 и Фиг. 2, где на Фиг. 1 приведена блок-схема предлагаемого устройства - интегрированной системы боевого управления нижней полусферы надводного корабля, на Фиг. 2 - блок-схема пульта управления маневрированием надводного корабля. Сама система управления маневрированием надводного корабля не входит в заявляемую интегрированную систему.
Интегрированная система боевого управления нижней полусферы надводного корабля (НК) (Фиг. 1) содержит гидроакустический канал 1 с расположенной в носовом обтекателе цилиндрической антенной, гидроакустический канал 2 с гибкой протяженной буксируемой антенной, канал 3 обработки информации от радиогидроакустических буев, пульты 4.1
- 4.3 управления гидроакустическими каналами, систему управления ПЛО 5, пульт 6 управления ПЛО, пульт 7 отображения и анализа информации, пульт 8 управления маневрированием надводного корабля.
Гидроакустические каналы 1-3 предназначены для обнаружения в режимах гидролокации и шумопеленгования подводных и надводных целей и выдачи целеуказаний.
Пульты 4.1-4.3 управления гидроакустическими каналами предназначены для обеспечения работы последних и передачи информации от них на пульт 7 отображения и анализа информации.
Система управления 5 ПЛО предназначена для выбора средства поражения цели и его наведения.
Пульт 6 управления ПЛО предназначен для обеспечения работы ПЛО, в частности, передачи на нее целеуказаний пульта 7 отображения и анализа информации.
Пульт 7 отображения и анализа информации предназначен для сбора, отображения и анализа информации об обнаруженных целях и передачи ее на пульт 6 управления ПЛО и пульт 8 управления маневрированием надводного корабля.
Система управления маневрированием надводного корабля (не показана) предназначена для вывода последнего в точку возможного применения ПЛО с учетом возможного маневрирования цели.
Пульт 8 управления маневрированием надводного корабля предназначен для обеспечения вывода НК в точку применения ПЛО с учетом информации об обнаруженных целях.
Пульт управления маневрированием надводного корабля (Фиг. 2) содержит систему 9 обмена информации, устройство памяти 10, блок 11 знаний, блоки 12.1, 12.2 и 12.3 отображения, блок 13 трассового анализа и прогноза местоположения цели, блок 14 определения области занятия позиции для применения ПЛО, блок 15 прокладки курса, блок 16 управления системой маневрирования надводного корабля, пульт 17 оператора.
Система обмена информации 9 предназначена для приема информации от пульта отображения и анализа информации и передачи ее в блоки пульта управления маневрированием надводного корабля.
Устройство памяти 10 предназначено для хранения информации, полученной от пульта отображения и анализа информации и результатов ее обработки.
Блок знаний 11 содержит формализованные знания, содержащиеся в руководящих документах (РД), тактико-технические характеристики (ТТХ) гидроакустических каналов интегрированной системы боевого управления нижней полусферы надводного корабля в различных гидрологоакустических условиях (ГАУ), включающие дальность обнаружения, вероятность правильного обнаружения и ложной тревоги, а также ТТХ ПЛО, НК и вероятных целей в различных гидрометеорологических условиях (ГМУ), карты района, результаты метеопрогноза и др.
Блоки отображения 12.1-12.3 обеспечивают прием и отображение на типовых дисплеях данных, соответственно, от блока трассового анализа и прогноза местоположения цели 13, блока определения области занятия позиции для применения ПЛО 14, блока прокладки курса 15.
Блок трассового анализа и прогноза местоположения цели 13 на основе информации, полученной от пульта отображения и анализа информации и блока знаний 11, обеспечивает трассовый анализ движения цели и прогнозирование ее дальнейшего местоположения.
Блок определения области занятия позиции для применения ПЛО 14 на основании информации о местоположении цели от блока 13, ТТХ ПЛО и НК от блока знаний 11 обеспечивает определение области занятия позиции для применения ПЛО.
Блок прокладки курса 15 на основании информации об области занятия позиции для применения ПЛО, полученной от блока 14, и полученных от блока знаний 11 ТТХ НК и карт района проведения поисково-следящей операции обеспечивает прокладку курса к позиции применения ПЛО.
Блок управления системой маневрирования надводного корабля 16 предназначен для маневрирования в соответствии с курсом, проложенным блоком прокладки курса 15.
Пульт оператора 17 предназначен для контроля маневрирования НК и прерывания процесса в случае возникновения нештатных или аварийных ситуаций.
Все блоки реализованы на типовых бортовых вычислительных комплексах современных НК.
Предлагаемая интегрированная система боевого управления нижней полусферы надводного корабля функционирует следующим образом.
После обнаружения цели любым гидроакустическим каналом 1-3 и анализа информации при помощи пульта отображения и анализа информации 7 данные о ней передаются в пульт управления маневрированием надводного корабля 8 (Фиг. 1) и при помощи системы обмена информации (Фиг. 2) во все блоки пульта 8.
При подготовке НК к участию в поисково-следящей операции в устройство памяти 10 и в блок знаний 11 пульта управления маневрированием надводного корабля 8 (Фиг. 2) заносятся руководящие документы. Кроме того, в блок знаний И заносятся также ТТХ гидроакустических каналов в различных ГАУ, ТТХ ПЛО, ТТХ НК и вероятных целей в возможных ГМУ, электронные карты поиска, результаты метеопрогноза на время проведения поисково-следящей операции.
Далее на основании информации об обнаруженной цели и данных из блока 11 при помощи блока трассового анализа и прогноза местоположения цели 13, блока определения области занятия позиции для применения ПЛО 14, блока прокладки курса 15 блоком управления системой маневрирования надводного корабля 16 на систему передаются данные для управления рулевыми и подруливающими устройствами и управления движителем.
Оператор при помощи пульта 17 на основании данных, отображенных на дисплеях блоков отображения 12.1-12.3, осуществляет контроль маневрирования НК и обладает возможностью прерывания процесса при возникновении нештатных или аварийных ситуаций.
Таким образом, обеспечивается возможность управления интегрированной системой боевого управления нижней полусферы надводного корабля маневрированием НК и, соответственно, повышение ее эффективности как комплексной боевой системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система интеллектуальной поддержки оператора центра сбора и обработки информации сетецентрической системы освещения подводной обстановки | 2022 |
|
RU2785442C1 |
| ИНТЕГРИРОВАННАЯ ПОДСИСТЕМА УПРАВЛЕНИЯ ПРОТИВОТОРПЕДНОЙ ЗАЩИТЫ НАДВОДНОГО КОРАБЛЯ | 2019 |
|
RU2756387C1 |
| СПОСОБ ПОРАЖЕНИЯ МОРСКОЙ ЦЕЛИ (ВАРИАНТЫ) | 2011 |
|
RU2513366C2 |
| Интегрированная система навигации кораблей и судов обеспечения Военно-Морского Флота | 2020 |
|
RU2765606C1 |
| СИСТЕМА ОБЕСПЕЧЕНИЯ ГИДРОАКУСТИЧЕСКОЙ СОВМЕСТИМОСТИ КОРАБЕЛЬНЫХ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ | 2019 |
|
RU2724112C1 |
| Комплекс навигации и управления кораблем | 2022 |
|
RU2786251C1 |
| АВТОМАТИЗИРОВАННЫЙ ТРЕНАЖЕРНЫЙ КОМПЛЕКС ДЛЯ ПОДГОТОВКИ ЭКИПАЖЕЙ КОРАБЛЕЙ | 2003 |
|
RU2234138C1 |
| Учебно-тренировочный комплекс связи надводного корабля | 2021 |
|
RU2783021C1 |
| СПОСОБ ПОРАЖЕНИЯ МОРСКОЙ ЦЕЛИ ТОРПЕДАМИ | 2019 |
|
RU2733734C2 |
| ПРОТИВОВОЗДУШНЫЙ АВТОНОМНЫЙ УНИВЕРСАЛЬНЫЙ КОМПЛЕКС САМООБОРОНЫ ПОДВОДНЫХ ЛОДОК ("ПАУК" СО ПЛ) И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2008 |
|
RU2382313C2 |
Изобретение относится к области оснащения надводных кораблей аппаратурой и может быть применено при вооружении надводных кораблей. В состав интегрированной системы боевого управления нижней полусферы надводного корабля (НК) введен пульт управления маневрированием НК, содержащий систему обмена информацией, блок трассового анализа и прогноза местоположения цели, блок определения области занятия позиции для применения ПЛО, блок прокладки курса, блок управления системой маневрирования НК, устройство памяти, соединенное первой двусторонней связью с системой обмена информацией, первый, второй и третий блоки отображения, входы которых соединены со вторыми выходами блока трассового анализа, блока определения области занятия позиции для применения ПЛО и блока прокладки курса соответственно, вторые входы которых соединены соответственно с первым, вторым и третьим выходами блока знаний, пульт оператора, выход которого соединен со вторым входом блока управления системой маневрирования НК. Повышается эффективность системы как комплексной боевой системы. 2 з.п. ф-лы, 2 ил.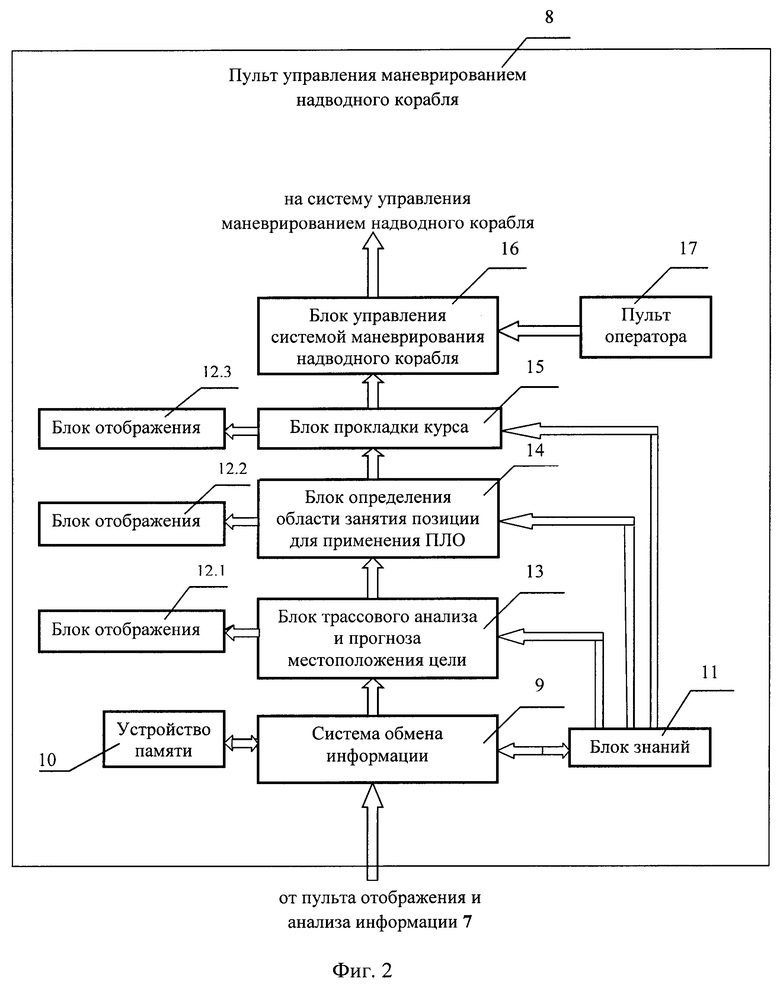
1. Интегрированная система боевого управления нижней полусферы надводного корабля, содержащая гидроакустический канал с расположенной в носовом обтекателе цилиндрической антенной, гидроакустический канал с гибкой протяженной буксируемой антенной, канал обработки информации от радиогидроакустических буев, каждый из которых соединен соответственно с первым, вторым и третьим пультами управления гидроакустическим каналом, а также систему управления противолодочным оружием (ПЛО), соединенную с пультом управления противолодочным оружием, и пульт отображения и анализа информации, входы которого соединены с выходами всех пультов управления, отличающаяся тем, что в ее состав введен пульт управления маневрированием надводного корабля, содержащий последовательно соединенные систему обмена информацией, блок трассового анализа и прогноза местоположения цели, блок определения области занятия позиции для применения ПЛО, блок прокладки курса, блок управления системой маневрирования надводного корабля, а также содержащий устройство памяти, соединенное первой двусторонней связью с системой обмена информацией, также содержащий первый, второй и третий блоки отображения, входы которых соединены со вторыми выходами блока трассового анализа, блока определения области занятия позиции для применения ПЛО и блока прокладки курса соответственно, вторые входы которых соединены соответственно с первым, вторым и третьим выходами блока знаний, соединенного второй двусторонней связью с системой обмена информацией, также содержащий пульт оператора, выход которого соединен со вторым входом блока управления системой маневрирования НК, выход которого соединен с системой маневрирования НК, а вход системы обмена информацией соединен с пультом отображения и анализа информации.
2. Интегрированная система по п. 1, отличающаяся тем, что блоки отображения, блок управления системой маневрирования надводного корабля и пульт оператора конструктивно объединены в единый пользовательский терминал.
3. Интегрированная система по п. 1 или 2, отличающаяся тем, что выход блока управления системой маневрирования надводного корабля содержит канал управления рулевыми и подруливающими устройствами и канал управления движителем.
| ИНТЕГРИРОВАННАЯ ПОДСИСТЕМА УПРАВЛЕНИЯ ПРОТИВОТОРПЕДНОЙ ЗАЩИТЫ НАДВОДНОГО КОРАБЛЯ | 2019 |
|
RU2756387C1 |
| Электрическая печь с газовой защитой нагревательных элементов | 1937 |
|
SU53473A1 |
| Способ наблюдения за распределением активной и реактивной мощности в электрических сетях | 1934 |
|
SU41881A1 |
| МНОГОПРОЦЕССОРНАЯ КОРАБЕЛЬНАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА | 2015 |
|
RU2583741C1 |
| KR 1020150047839, 06.05.2015. | |||

