Содержание притязаний на право приоритета в отношении изобретения под наименованием «Способ интеллектуальной парковки и устройства для его реализации», заявка на которое подана в Патентное ведомство КНР 29 ноября 2019 года под номером 201911206097.0, приведено в настоящей патентной заявке в полном объеме посредством цитирования.
Техническая область
Настоящее изобретение касается области автомобилестроения, в частности, способа интеллектуальной парковки и устройств для его реализации.
Предыдущий уровень техники
С развитием автомобильной промышленности все больше внимания стало уделяться технологиям автоматического вождения (автопилотирования), предусматривающим наличие в автомобилях функции автоматического паркинга.
В настоящее время процессы выполнения функции автоматического паркинга протекают следующим образом: водитель на автомобиле подъезжает к месту, располагающемуся спереди парковочного места и вплотную к нему, и вручную включает систему автоматической парковки, после чего автомобиль автоматически паркуется, совершая определенные маневры задним ходом в автоматическом режиме. Однако ввиду чрезмерно короткой дистанции, на которой осуществляется контроль системой автоматического паркинга, водителю приходится совершать множество маневров для того, чтобы автомобиль был автоматически припаркован, что приводит к увеличению продолжительности вождения и снижению комфортности во время парковки.
Краткий обзор
Принимая во внимание вышесказанное, целью настоящего изобретения является представление нового способа интеллектуальной парковки и устройств для его реализации, которые позволят устранить недостатки, имеющиеся в существующих технологиях вследствие чрезмерно короткой дистанции, на которой осуществляется контроль системой автоматического паркинга, такие как необходимость совершать множество маневров для автоматической парковки, сравнительно большая продолжительность вождения и пониженная комфортность во время парковки.
Для того чтобы достичь вышеизложенной цели, техническое решение, являющееся объектом настоящего раскрытия, реализуется следующим образом:
С одной стороны, представлен способ интеллектуальной парковки, применимый к автомобилям и включающий в себя:
Конечную траекторию для парковки автомобиля, выбранную из по меньшей мере одной предварительно сохраненной траектории;
Конечную точку на упомянутой конечной траектории для парковки автомобиля, установленную как расположенная наиболее близко к упомянутому автомобилю;
Напоминание о необходимости переместить автомобиль в упомянутую конечную точку, отправляемое водителю упомянутого автомобиля, если взаимное расположение упомянутого автомобиля и упомянутой конечной точки отвечает условию близости;
Собственно парковку автомобиля, совершаемую по упомянутой конечной траектории парковки начиная с упомянутой конечной точки после того, как упомянутый автомобиль достигает данной точки.
Далее, этап, предшествующий этапу, на котором делается выбор из по меньшей мере одной предварительно сохраненной траектории конечной траектории для парковки автомобиля, включает в себя, в том числе следующие действия:
Производство большого количества изображений движущегося автомобиля при поступлении команды об обучении траекториям;
Определение траектории движения по меньшей мере одного характерного предмета, находящегося на участке движения автомобиля, на упомянутых изображениях движущегося автомобиля;
Определение конечной траектории парковки автомобиля в соответствии с каждой из упомянутых траекторий движения;
Сохранение информации об упомянутой конечной траектории парковки.
Далее, напоминание о необходимости переместить автомобиль в упомянутую конечную точку, отправляемое водителю упомянутого автомобиля, если взаимное расположение упомянутого автомобиля и упомянутой конечной точки отвечает условию близости, содержит в себе:
Информацию о фактическом расстоянии между текущим местоположением упомянутого автомобиля и упомянутой конечной точкой;
Информацию о первой дистанции отображения упомянутого фактического расстояния в первом направлении, причем первым направлением является направление касательной упомянутой конечной траектории парковки в упомянутой конечной точке;
Информацию о второй дистанции отображения упомянутого фактического расстояния во втором направлении, причем упомянутое второе направление перпендикулярно по отношению к упомянутому первому;
Информацию о курсовом угле между текущим направлением движения упомянутого автомобиля и упомянутым первым направлением;
Если упомянутая первая дистанция меньше или равна первому заданному значению, либо упомянутая вторая дистанция меньше или равна второму заданному значению, либо упомянутый курсовой угол меньше или равен третьему заданному значению, т.е. если удовлетворяется по меньшей мере одно из данных трех условий, то водителю упомянутого автомобиля отправляется сообщение с напоминанием о необходимости доехать до упомянутой конечной точки.
Далее, этап, предшествующий этапу, когда упомянутый автомобиль доезжает до упомянутой конечной точки и начинает парковаться по упомянутой конечной траектории парковки начиная с упомянутой конечной точки, включает в себя, помимо прочего, следующие действия:
Отправка сообщения с напоминанием о необходимости тормозить автомобиль в упомянутой конечной точке;
Упомянутый этап, когда упомянутый автомобиль доезжает до упомянутой конечной точки и начинает парковаться по упомянутой конечной траектории парковки начиная с упомянутой конечной точки, включает в себя:
Парковку по упомянутой конечной траектории парковки начиная с упомянутой конечной точки, когда автомобиль доезжает до упомянутой конечной точки и его скорость определяется как нулевая.
Далее, этап, на котором определяется наиболее близкая к упомянутому автомобилю конечная точка на упомянутой конечной траектории для парковки автомобиля, включает в себя:
Проверку параметров автомобиля, к которым относится по меньшей мере один из следующих параметров: давление в шинах, состояние дверей и состояние зеркала заднего вида;
Определение наиболее близкой к упомянутому автомобилю конечной точки на упомянутой конечной траектории для парковки автомобиля, если упомянутые параметры автомобиля отвечают заданным условиям.
По сравнению с существующими на сегодня технологиями способ интеллектуальной парковки, представляемый настоящим раскрытием, обладает нижеследующими преимуществами:
Согласно данному примеру реализации настоящего раскрытия, автомобиль, откликаясь на поступившую команду о парковке, выбирает из по меньшей мере одной предварительно сохраненной траектории конечную траекторию для парковки и определяет наиболее близкую к автомобилю конечной точки на данной траектории. Если взаимное расположение автомобиля и конечной точки отвечает условию близости, т.е. когда автомобиль находится на близлежащем к конечной траектории парковки участке, автомобиль доезжает до конечной точки и начинает парковаться по конечной траектории для парковки с данной конечной точки. Таким образом, водителю достаточно доехать до близлежащего к конечной траектории парковки участка, чтобы автомобиль мог парковаться с помощью системы интеллектуальной парковки. Согласно данному примеру реализации настоящего раскрытия, автомобиль может быть припаркован способом интеллектуальной парковки с более далекого расстояния, и для начала автоматического паркинга водителю не требуется подъезжать к месту, располагающемуся спереди парковочного места и вплотную к нему. Такая возможность освобождает водителя от необходимости совершать множество маневров для того, чтобы автомобиль был автоматически припаркован, позволяет сокращать продолжительность вождения и повышать комфортность во время парковки.
Другой целью настоящего раскрытия является представление устройства для реализации способа интеллектуальной парковки, включающего в себя:
Первый модуль подтверждения, предназначенный для выбора из по меньшей мере одной предварительно сохраненной траектории конечной траектории для парковки автомобиля;
Второй модуль подтверждения, предназначенный для определения наиболее близкой к упомянутому автомобилю конечной точки на упомянутой конечной траектории для парковки автомобиля;
Модуль отправки, предназначенный для отправки водителю упомянутого автомобиля напоминания о необходимости переместить автомобиль в упомянутую конечную точку, если взаимное расположение упомянутого автомобиля и упомянутой конечной точки отвечает условию близости;
Контрольный модуль, предназначенный для управления процессом парковки автомобиля, совершаемым по упомянутой конечной траектории парковки начиная с упомянутой конечной точки после того, как упомянутый автомобиль достигает данной точки.
Далее, устройство включает в себя, помимо прочего:
Модуль фотографии, предназначенный для производства большого количества изображений движущегося автомобиля при поступлении команды об обучении траекториям;
Третий модуль подтверждения, предназначенный для подтверждения траектории движения по меньшей мере одного характерного предмета, находящегося на участке движения автомобиля, на упомянутых изображениях движущегося автомобиля;
Четвертый модуль подтверждения, предназначенный для подтверждения конечной траектории парковки автомобиля в соответствии с каждой из упомянутых траекторий движения;
Модуль памяти, предназначенный для сохранения информации об упомянутой конечной траектории парковки.
Далее, упомянутый модуль отправки включает в себя:
Первый подмодуль подтверждения, предназначенный для определения фактического расстояния между текущим местоположением упомянутого автомобиля и упомянутой конечной точкой.
Второй подмодуль подтверждения, предназначенный для определения первой дистанции отображения упомянутого фактического расстояния в первом направлении, причем первым направлением является направление касательной упомянутой конечной траектории парковки в упомянутой конечной точке.
Третий подмодуль подтверждения, предназначенный для определения второй дистанции отображения упомянутого фактического расстояния во втором направлении, причем упомянутое второе направление перпендикулярно по отношению к упомянутому первому.
Четвертый подмодуль подтверждения, предназначенный для определения курсового угла между текущим направлением движения упомянутого автомобиля и упомянутым первым направлением.
Подмодуль отправки, предназначенный для отправки водителю упомянутого автомобиля сообщения с напоминанием о необходимости доехать до упомянутой конечной точки, если упомянутая первая дистанция меньше или равна первому заданному значению, либо упомянутая вторая дистанция меньше или равна второму заданному значению, либо упомянутый курсовой угол меньше или равен третьему заданному значению, т.е. если удовлетворяется по меньшей мере одно из данных трех условий.
Далее, упомянутое устройство включает в себя, помимо прочего:
Модуль вывода, предназначенный для выведения напоминания о необходимости тормозить автомобиль в упомянутой конечной точке.
Упомянутый контрольный модуль включает в себя:
Первый контрольный подмодуль, предназначенный для управления процессом парковки, совершаемым по упомянутой конечной траектории парковки начиная с упомянутой конечной точки, когда автомобиль доезжает до упомянутой конечной точки и его скорость определяется как нулевая.
Далее, второй модуль подтверждения включает в себя:
Подмодуль измерения, предзначенный для проверки параметров автомобиля, к которым относится по меньшей мере один из следующих параметров: давление в шинах, состояние дверей и состояние зеркала заднего вида.
Пятый подмодуль подтверждения, предназначенный для определения наиболее близкой к упомянутому автомобилю конечной точки на упомянутой траектории для парковки автомобиля, если упомянутые параметры автомобиля отвечают заданным условиям.
Упомянутые устройства для реализации способа интеллектуальной парковки имеют перед существующими технологиями те же преимущества, что и сам вышеописанный способ интеллектуальной парковки, в связи с чем в дальнейшем подробно речи о них не пойдет.
Вышеизложенное является лишь кратким обзором технических решений, предлагаемых настоящим раскрытием. Для того чтобы более широко раскрыть сущность технических способов, представленных настоящим раскрытием, и в соответствии с инструкцией претворить его в жизнь, а также дать пояснения и сделать более понятными характерные особенности, преимущества и одну из вышеперечисленных и прочих целей настоящего раскрытия, ниже приводятся конкретные примеры его реализации.
Пояснения к иллюстрациям
Для того чтобы внести ясность в технические решения, предлагаемые примерами реализации настоящего раскрытия или существующими технологиями, ниже дается краткая информация об иллюстрациях, используемых для описания примеров реализации данного раскрытия или существующих технологий, причем, очевидно, что нижеописанные иллюстрации относятся к примерам реализации настоящего раскрытия и могут послужить основой для получения рядовыми техническими работниками данной области других иллюстраций без созидательного труда.
Иллюстрации, составляющие часть настоящего раскрытия, используются для облегчения понимания сути представленного в заявке раскрытия, а иллюстрированные примеры реализации и текстовые пояснения к ним служат для интерпретации настоящего раскрытия и не устанавливают ненужных ограничений в его отношении. Далее даются пояснения к прилагаемым иллюстрациям:
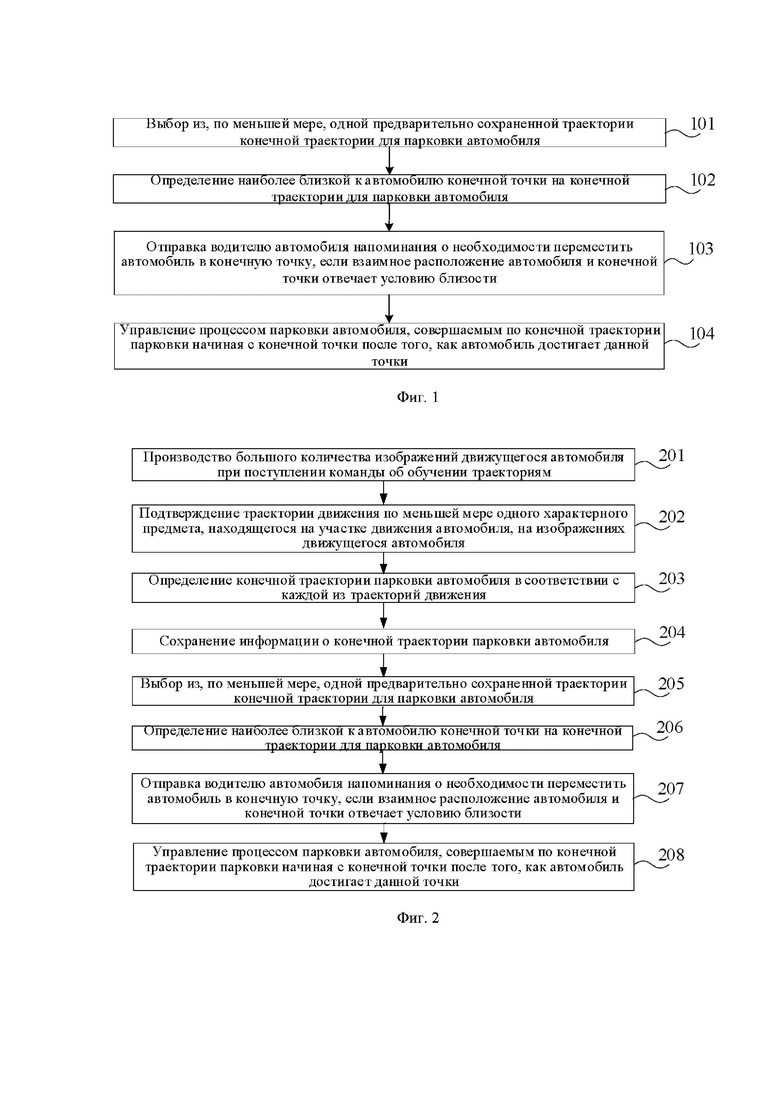
На Фиг. 1 представлена технологическая схема способа интеллектуальной парковки, предложенного примером реализации 1 настоящего раскрытия;
На Фиг. 2 представлена технологическая схема способа интеллектуальной парковки, предложенного примером реализации 2 настоящего раскрытия;
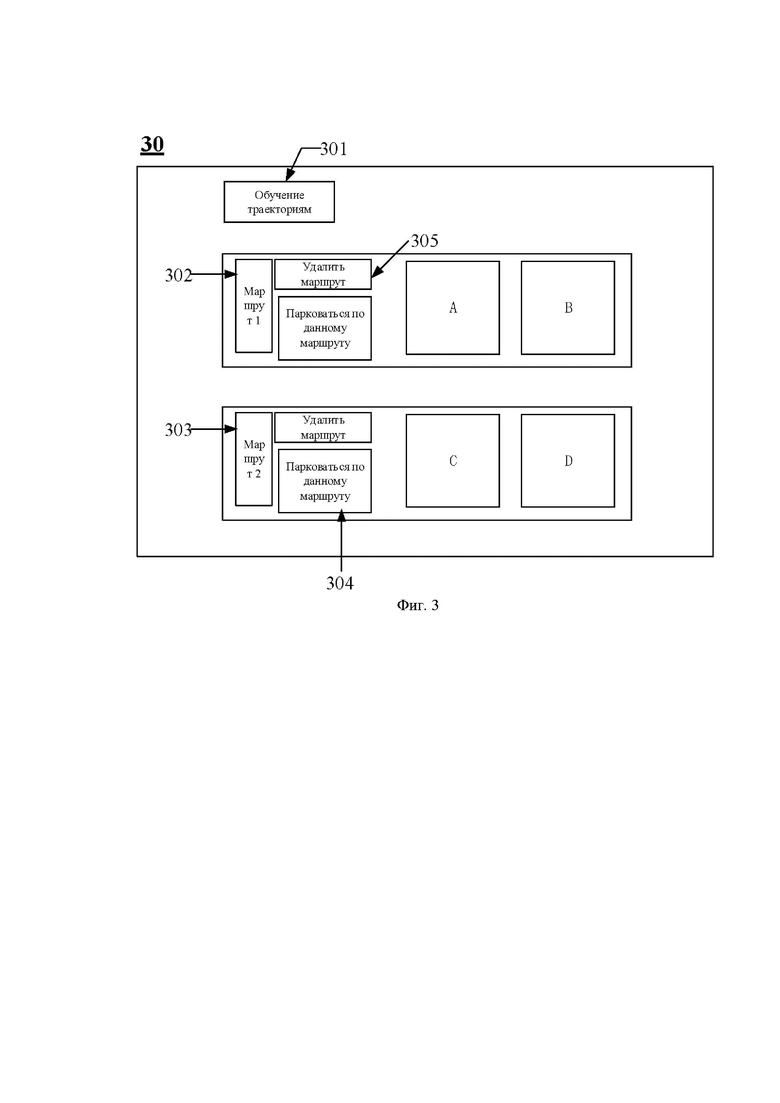
На Фиг. 3 представлено изображение интерфейса системы интеллектуальной парковки, предложенной примером реализации 2 настоящего раскрытия;
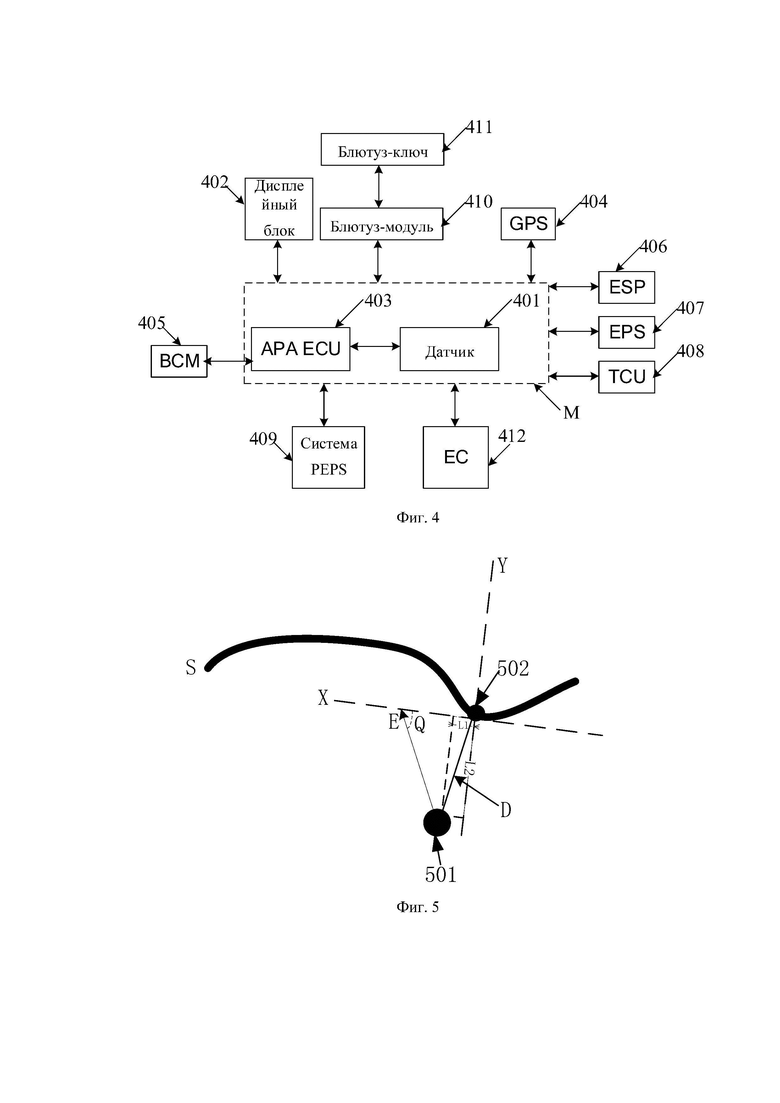
На Фиг. 4 представлена структурная схема автомобиля, предложенного примером реализации 2 настоящего раскрытия;
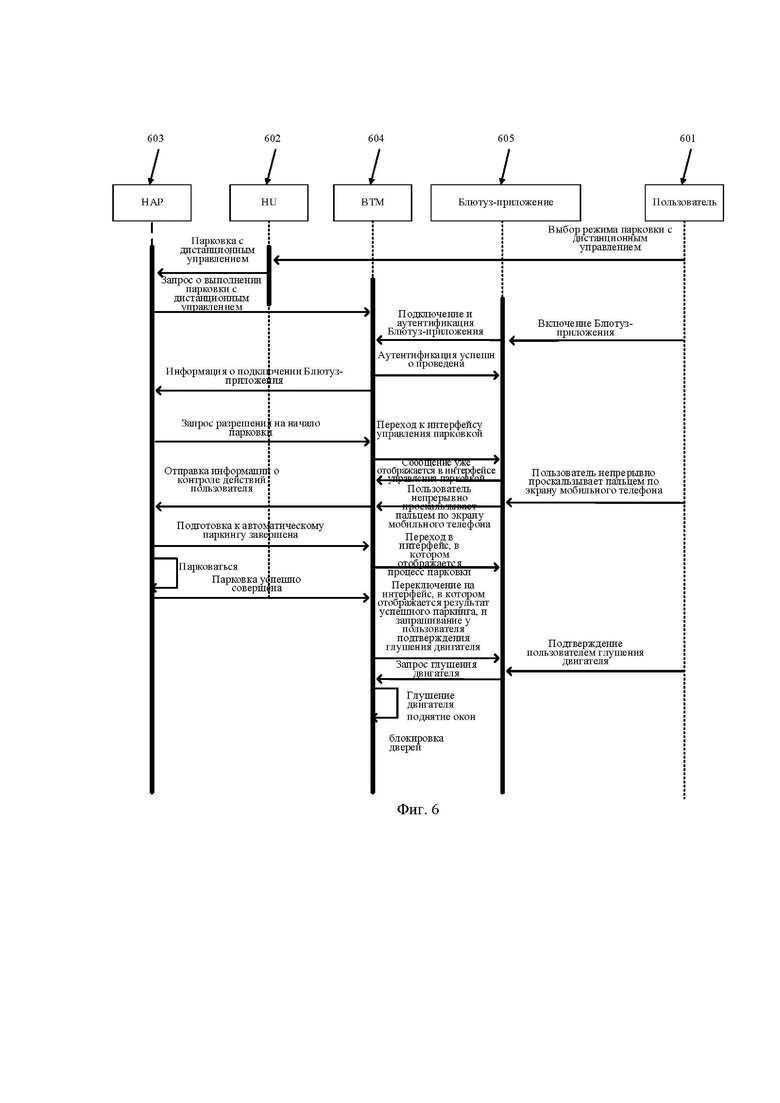
На Фиг. 5 схематически представлен предложенный примером реализации 2 настоящего раскрытия участок, на котором указаны текущее местоположение автомобиля и конечная точка;
На Фиг. 6 схематически представлен процесс передачи команды о выполнении парковки по модели дистанционного воспроизведения, предложенный примером реализации 2 настоящего раскрытия;
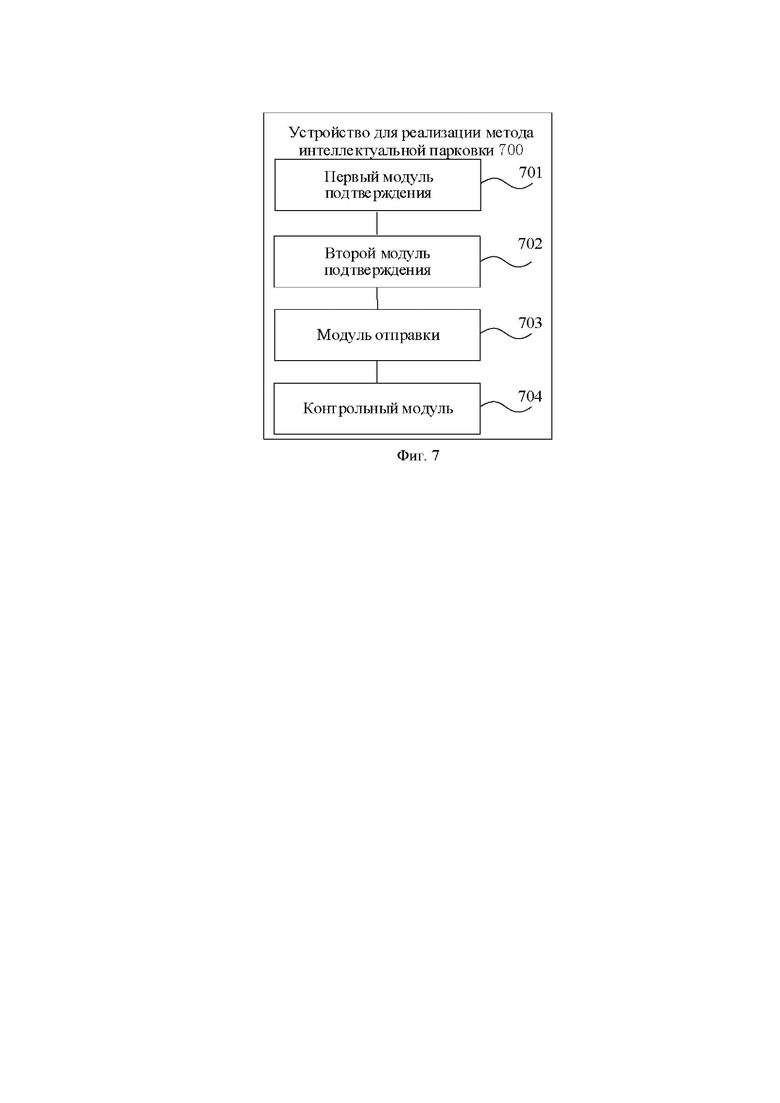
На Фиг. 7 представлен чертеж конструкции устройства для реализации способа интеллектуальной парковки, предложенного примером реализации 3 настоящего раскрытия;
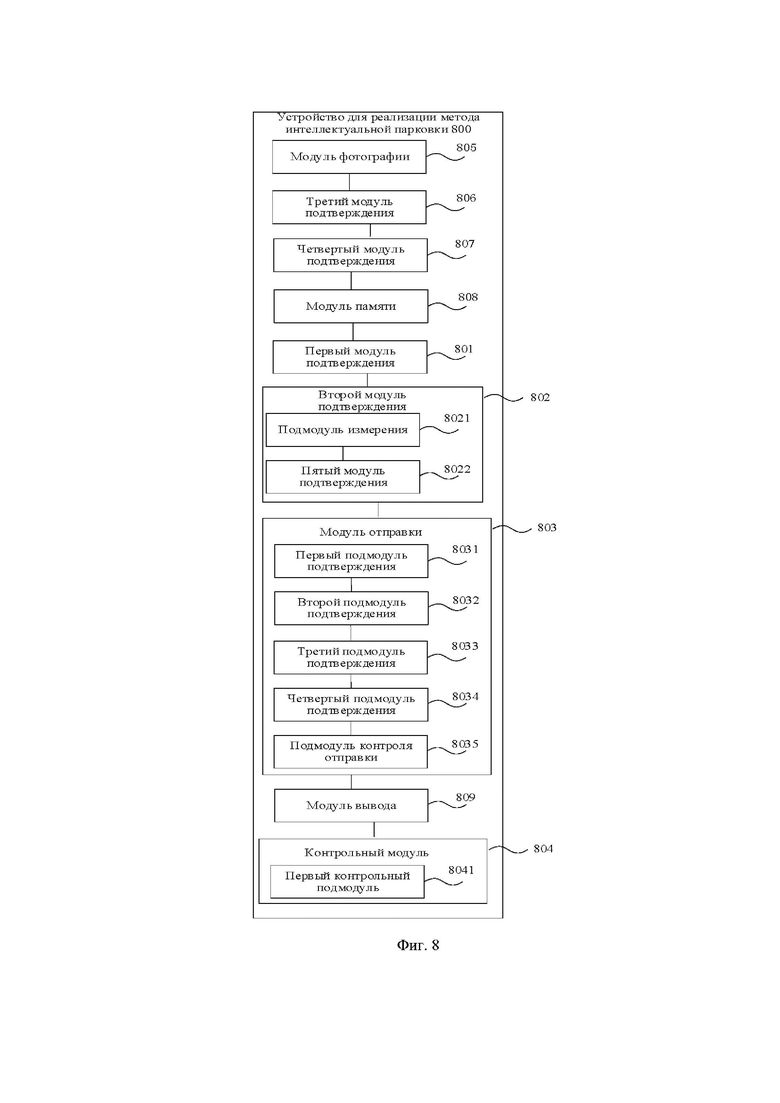
На Фиг. 8 представлен чертеж конструкции устройства для реализации способа интеллектуальной парковки, предложенного примером реализации 4 настоящего раскрытия;
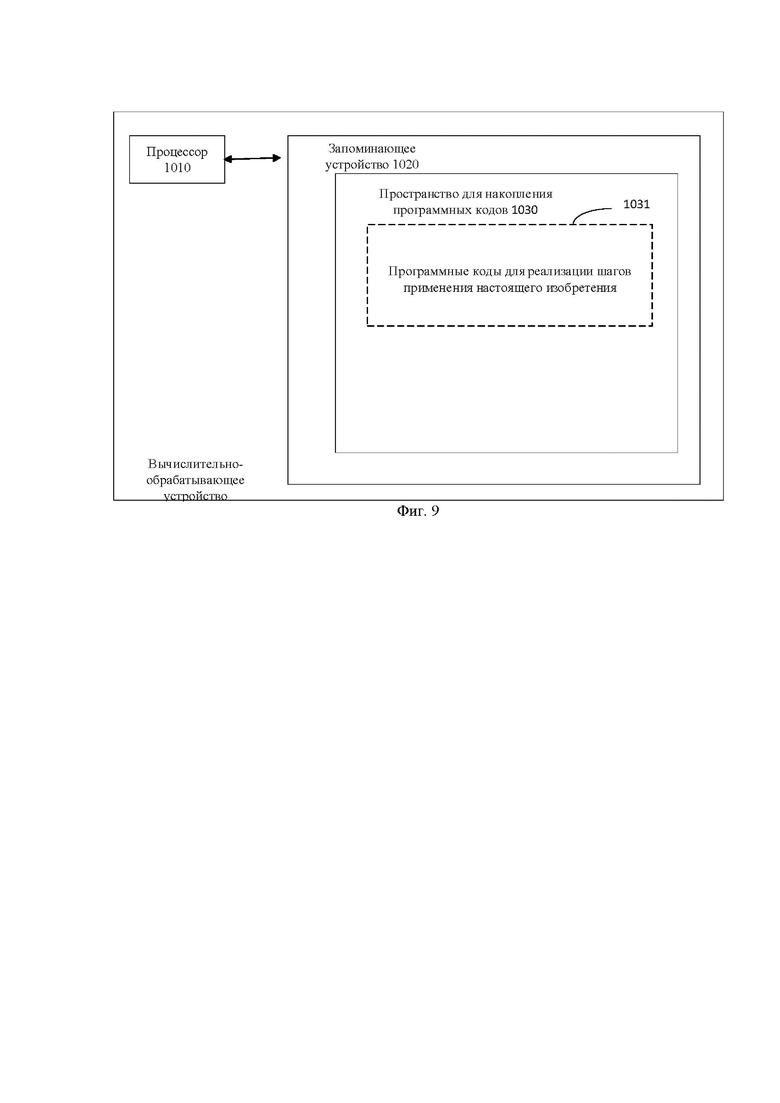
На Фиг. 9 схематически изображена структура вычислительно-обрабатывающего оборудования, используемого для реализации способа, представляемого в настоящем раскрытии; и
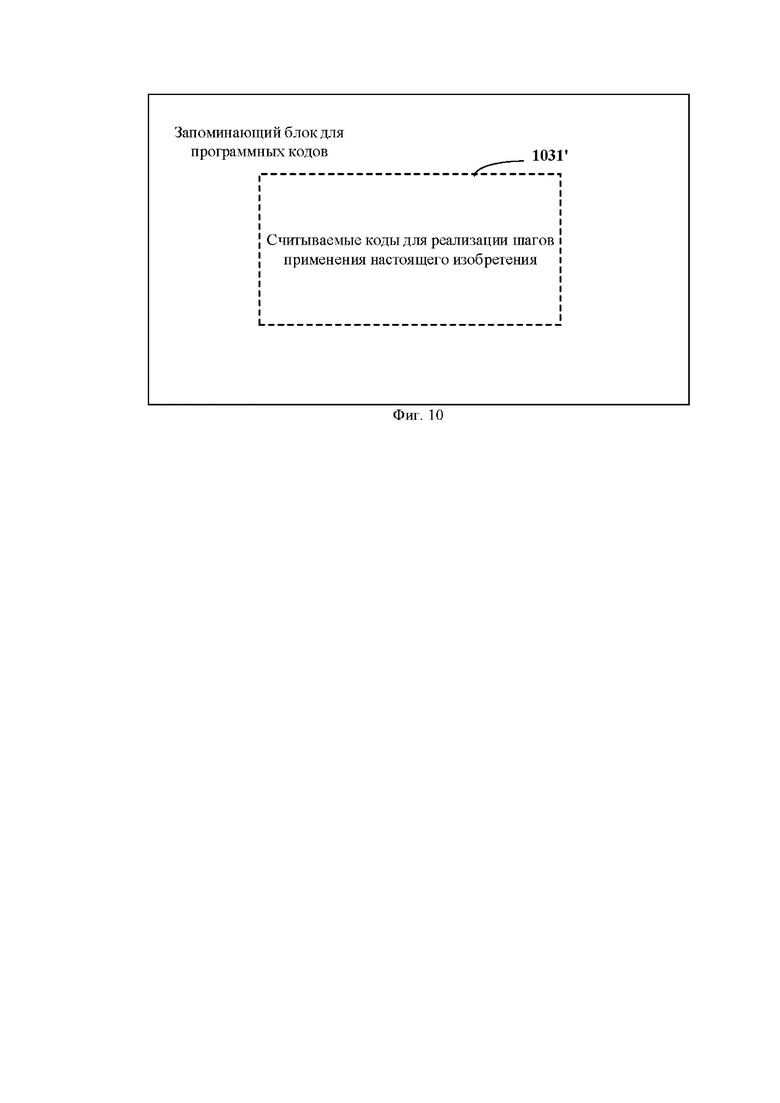
На Фиг. 10 схематически изображен модуль памяти, используемый для хранения или переноса программных кодов, необходимых для реализации представляемого настоящим раскрытием способа.
Детальное описание
В целях раскрытия сущности вышеперечисленных задач, технических решений и преимуществ настоящего раскрытия далее дается полное и детальное описание технических решений, применимых в примерах реализации изобретения, с использованием иллюстраций в виде чертежей. Однако приведенные ниже примеры реализации раскрытия охватывают лишь часть, а не всю сферу его применения. Все прочие способы реализации раскрытия, получаемые рядовыми техническими работниками данной области на основе приведенных в настоящей заявке примеров без созидательного труда, являются объектами патентных прав и подлежат охране в рамках настоящей заявки.
Следует отметить, что при отсутствии противоречий примеры реализации раскрытия, представленные в настоящей заявке, и их характерные особенности могут быть взаимно комбинированы.
Ниже на примерах реализации с иллюстрациями в виде прилагаемых чертежей дается детальное описание настоящего раскрытия.
Пример реализации 1
На Фиг. 1 представлена технологическая схема способа интеллектуальной парковки, предложенного примером реализации 1 настоящего раскрытия. Представляемый способ интеллектуальной парковки применим к автомобилям и, как видно на Фиг. 1, включает в себя:
Шаг 101: выбор из по меньшей мере одной предварительно сохраненной траектории конечной траектории для парковки автомобиля.
Согласно данному примеру реализации настоящего раскрытия, автомобиль может отображать интерфейс управления интеллектуальной парковкой, в котором пользователь может выбрать опцию интеллектуальной парковки и подать команду о парковке. В автомобиль предварительно сохранена по меньшей мере одна траектория для парковки, и при поступлении команды о парковке автомобиль выбирает из таких предварительно сохраненных траекторий конечную траекторию парковки, которая может быть либо выбрана пользователем в отображенном интерфейсе управления интеллектуальной парковки, либо определена автомобилем путем автоматического согласования своего текущего местоположения и ближайшей траектории парковки.
Шаг 102: определение наиболее близкой к автомобилю конечной точки на конечной траектории для парковки автомобиля.
Согласно данному примеру реализации настоящего раскрытия, автомобиль может определить расстояние от каждой точки на конечной траектории парковки до автомобиля, причем точка, соответствующая минимальному из всех значений такого расстояния, и есть конечная.
Шаг 103: отправка водителю автомобиля напоминания о необходимости переместить автомобиль в конечную точку, если взаимное расположение автомобиля и конечной точки отвечает условию близости.
Согласно данному примеру реализации настоящего раскрытия, если взаимное расположение автомобиля и конечной точки отвечает условию близости, что свидетельствует о близком нахождении автомобиля к конечной траектории парковки, то водителю автомобиля отправляется сообщение с напоминанием о необходимости переместить автомобиль в конечную точку.
Шаг 104: управление процессом парковки автомобиля, совершаемым по конечной траектории парковки начиная с конечной точки после того, как автомобиль достигает данной точки.
Согласно данному примеру реализации настоящего раскрытия, когда автомобиль достигает конечной точки, он может начинать парковаться по конечной траектории парковки с этой точки, пока не доедет до самого конца траектории парковки и не завершит процесс автоматической парковки.
Согласно данному примеру реализации настоящего раскрытия, автомобиль выбирает из по меньшей мере одной предварительно сохраненной траектории конечную траекторию для парковки и определяет наиболее близкую к автомобилю конечной точки на данной траектории. Если взаимное расположение автомобиля и конечной точки отвечает условию близости, т.е. когда автомобиль находится на близлежащем к конечной траектории парковки участке, водителю автомобиля отправляется сообщение с напоминанием о необходимости переместить автомобиль в упомянутую конечную точку, а когда автомобиль достигает данной точки, он начинает парковаться по конечной траектории для парковки с конечной точки. Таким образом, водителю достаточно доехать до близлежащего к конечной траектории парковки участка, чтобы автомобиль мог парковаться с помощью системы интеллектуальной парковки. Согласно данному примеру реализации настоящего раскрытия, автомобиль может быть припаркован способом интеллектуальной парковки с более далекого расстояния, и для начала автоматического паркинга водителю не требуется подъезжать к месту, располагающемуся спереди парковочного места и вплотную к нему. Такая возможность освобождает водителя от необходимости совершать множество маневров для того, чтобы автомобиль был автоматически припаркован, позволяет сокращать продолжительность вождения и повышать комфортность во время парковки.
Пример реализации 2
На Фиг. 2 представлена технологическая схема способа интеллектуальной парковки, предложенного примером реализации 2 настоящего раскрытия. Представляемый способ интеллектуальной парковки применим к автомобилям и, как видно на Фиг. 2, включает в себя:
Шаг 201: производство большого количества изображений движущегося автомобиля при поступлении команды об обучении траекториям.
Согласно данному примеру реализации настоящего раскрытия, пользователь может кликнуть на опцию «Обучение траекториям» в интерфейсе управления интеллектуальной парковкой и подать команду об обучении траекториям. При поступлении в автомобиль команды об обучении траекториям он запускает свою собственную систему кругового обзора (Around View Monitor, AVM) и посредством ультразвукового радара и камеры кругового обзора, имеющихся в данной системе, производит множество изображений движущегося автомобиля, на которых могут быть засняты окружающие объекты, присутствующие на участке движения автомобиля во время его движения, такие как установленные в фиксированных местах знаки паркинга, разметки парковочных мест или неподвижные постройки.
Например, на Фиг. 3 представлено изображение интерфейса системы интеллектуальной парковки, предложенной примером реализации 2 настоящего раскрытия. Как видно на Фиг. 3, в интерфейсе системы интеллектуальной парковки 30 имеется опция «Обучение траекториям» 301, при нажатии пользователем которой автомобиль может посредством камеры кругового обзора произвести множество изображений движущегося себя.
Опционально, представленная на Фиг. 4 структурная схема автомобиля, предложенного примером реализации 2 настоящего раскрытия, включает в себя: датчик 401, состоящий из ультразвукового датчика в составе ультразвукового радара и датчика изображения в камере кругового обзора, служащих главным образом для сбора информации об окружающей обстановке вокруг автомобиля. Автомобиль может посредством датчика 401 получить различные изображения движущегося себя.
Опционально, как видно на Фиг. 4, система автомобиля также оснащена дисплейным блоком 402, используемым для отображения интерфейсов, т.е. посредством дисплейного блока 402 можно выполнить шаги, на которых необходимо отображать интерфейс управления интеллектуальной парковкой.
Опционально, прежде чем выполняется шаг 201, автомобиль может измерить параметры окружающей обстановки.
Согласно данному примеру реализации настоящего раскрытия, к таким параметрам окружающей обстановки относятся параметры обстановки для обучения и параметры обстановки на парковочной площадке, в том числе к вышеупомянутым параметрам обстановки для обучения относится степень освещенности в окружающей обстановке, а к параметрам обстановки на парковочной площадке относится информация о том, относится ли окружающая среда к одному из следующих типов пространств: закрытое парковочное пространство, микрорайон высокой плотности застройки или корпоративная территория.
Помимо этого, автомобиль может анализировать изображения, производимые камерой кругового обзора, которой он оборудован, для получения параметров об обстановки на парковочной площадке и посредством датчика освещенности, которым он оборудован, получать информацию о степени освещенности.
Затем, когда параметры об окружающей обстановке отвечают условиям, заданным для участка вокруг траектории парковки, выполняется шаг 201. Если параметры об окружающей обстановке не отвечают условиям, заданным для участка вокруг траектории парковки, то на умном интерфейсе 30 отображается информация об ошибке, суть которой может заключаться в том, что окружающая обстановка не отвечает критериям для обучения траектории, вследствие чего последнее не представляется возможным.
Согласно данному примеру реализации настоящего раскрытия, к условиям, заданным для участка вокруг траектории парковки, относится освещенность выше 800 люксов (Lux) и окружающая среда, являющаяся одним из следующих типов пространств: закрытое парковочное пространство, микрорайон высокой плотности застройки или корпоративная территория.
Помимо вышеизложенного, с одной стороны, если освещенность выше 800 люксов (Lux), то это означает, что пространство в достаточной степени освещено и значения параметров производимых камерой кругового обзора изображений движущегося автомобиля, таких как яркость и коэффициент контрастности, являются оптимальными, что благоприятно для проведения автомобилем анализа изображений движущегося себя и обеспечивает применимость данных изображений. С другой стороны, если окружающая среда является одним из следующих типов пространств: закрытое парковочное пространство, микрорайон высокой плотности застройки или корпоративная территория, то в такой окружающей среде имеется множество характерных предметов, которые могут служить в качестве ориентиров, таких как установленные в фиксированных местах знаки паркинга, разметки парковочных мест и проч. Такие ориентиры позволяют обнаруживать траектории движения еще большего количества характерных предметов с тем, чтобы на их основе извлекать точные траектории движения автомобиля и генерировать точные траектории для парковки автомобиля.
Опционально, как видно на Фиг. 4, в систему автомобиля также входит электронный блок управления системой помощи при автоматической парковке (Auto Parking Assist Electronic Control Unit, APA ECU) 403, соединенный с датчиком 401 и составляющий вместе с датчиков 401 центральную систему М, причем в APA ECU 403 имеется алгоритм распознавания изображений, применяемый для приведения в действие датчика 401 и вычислительной обработки информации на изображениях, произведенных датчиком 401, с целью получения обработанной и отсортированной информации об окружающей обстановке вокруг автомобиля. Посредством APA ECU 403 можно проверять параметры окружающей обстановки. Кроме того, дисплейный блок 402 соединен с центральной системой М.
Опционально, если во время производства большого количества изображений движущегося автомобиля, предусмотренного в шаге 201, обнаруживается, что человеком совершены те или иные аварийные операции, то в первую очередь приостанавливается фотографирование, затем, при поступлении сигнала о том, что ошибка устранена, водителю делается напоминание о необходимости вернуться к месту, в котором было приостановлено фотографирование, и дать автомобилю команду возобновить данный процесс.
Например, когда пользователь тормозит и ставит автомобиль в режим паркинга (Parking, P), камера кругового обзора временно прекращает фотографировать, при этом в интерфейсе управления интеллектуальной парковкой 30 может отображаться информация об ошибке, которая может выглядеть следующим образом: «Автомобиль поставлен пользователем в режим Р, приостановлен процесс обучения траекториям!» Когда пользователь переключает автомобиль на переднюю передачу (Drive, D), т.е. когда автомобиль получает сигнал о том, что ошибка устранена, водителю делается напоминание о необходимости вернуться к месту, в котором было приостановлено фотографирование, и дать автомобилю команду возобновить данный процесс.
Другой пример: когда пользователь в экстренном режиме уступает дорогу пешеходам, т.е. появляется точка перегиба, камера кругового обзора временно прекращает фотографировать, при этом в интерфейсе управления интеллектуальной парковкой 30 может отображаться информация об ошибке, которая может выглядеть следующим образом: «На траектории движения автомобиля пользователя появилась точка перегиба, приостановлен процесс обучения траекториям!» Когда пользователь переключает автомобиль на переднюю передачу (Drive, D), т.е. когда автомобиль получает сигнал о том, что ошибка устранена, водителю делается напоминание о необходимости вернуться к месту, в котором было приостановлено фотографирование, и дать автомобилю команду возобновить данный процесс.
Согласно данному примеру реализации настоящего раскрытия, после того как автомобиль доезжает до точки назначения, пользователь может нажать и выбрать во всплывающем окне в интерфейсе управления интеллектуальной парковкой 30 пункт «Завершить обучение».
Шаг 202: подтверждение траектории движения по меньшей мере одного характерного предмета, находящегося на участке движения автомобиля, на изображениях движущегося автомобиля.
Согласно данному примеру реализации настоящего раскрытия, характерными предметами могут считаться такие предметы на участке движения автомобиля, которые являются наиболее заметными среди прочих, и предметы с неизменяющимся местоположением, такие как знаки паркинга, разметки парковочных мест и т.д. Автомобиль может посредством алгоритмов одновременной локализации и картографирования (Simultaneous Localization And Mapping, SLAM) определять траекторию движения по меньшей мере одного характерного предмета на множестве изображений движущегося автомобиля.
Говоря конкретно, алгоритм SLAM состоит главным образом из двух этапов: начального и конечного. На начальном этапе проводится визуальная одометрия (VO), путем которой на основе соседствующих изображений движущегося автомобиля определяется траектория движения камеры кругового обзора и конечному этапу предоставляются начальные величины.
В том числе визуальный одометр распознает на многочисленных изображениях движущегося автомобиля характерные точки (характерные предметы) и производит согласование характерных точек на каждом изображении движущегося автомобиля. Каждая характерная точка на изображениях движущегося автомобиля состоит из ключевых точек (Key point) и дескрипторов (Descriptor). Под ключевой точкой понимается положение данной характерной точки на данном изображении движущегося автомобиля, причем у некоторых ключевых точек имеется по меньшей мере один из следующих типов данных: данные о направлении и данные о размерах. Под дескриптором обычно понимается вектор, который способом предварительной настройки описывает элементы изображений вокруг ключевой точки. Как правило, дескрипторы проектируются на основе того, что у внешне похожих характерных точек должны быть похожие дескрипторы, поэтому, для того, чтобы в процессе согласования признать две характерные точки совпадающими друг с другом, достаточно, чтобы расстояние между дескрипторами этих двух характерных точек в векторном пространстве было близким. Таким образом, процесс распознавания, согласования и извлечения траекторий движения может включать в себя:
Шаг 2021: поиск на изображениях движущегося автомобиля элементов изображений с характерными точками и извлечение из изображений движущегося автомобиля ключевых точек.
Шаг 2022: расчет дескрипторов характерных точек на основе информации о местоположении ключевых точек;
Шаг 2023: согласование дескрипторов по меньшей мере одной характерной точки участка движения автомобиля на изображениях движущегося автомобиля на основе дескрипторов характерных точек.
Шаг 2024: регистрация информации о местоположении успешно согласованных дескрипторов и связывание данной информации о местоположении в соответствии с временной последовательностью для получения траектории движения по меньшей мере одной характерной точки участка движения автомобиля на изображениях движущегося автомобиля.
Для примера можно рассмотреть ориентированную FAST и повернутые BRIEF (Oriented FAST and Rotated BRIEF, ORB). Характерные точки ORB не изменяются по мере перемещения, вращения или изменения степени освещенности фотоаппарата, при этом с помощью алгоритма извлечения признаков из функции ускоренного тестирования сегмента (Features From Accelerated Segment Test, FAST) быстро извлекаются из изображений движущегося автомобиля ключевые точки, которые называют точками FAST, затем с помощью дескрипторов бинарных робастных независимых элементарных признаков (BRIEF) описываются характерные точки ORB, производится согласование дескрипторов по меньшей мере одной характерной точки участка движения автомобиля на изображениях движущегося автомобиля, регистрация информации о местоположении успешно согласованных дескрипторов и связывание данной информации о местоположении в соответствии с временной последовательностью для получения траектории движения по меньшей мере одной характерной точки ORB на изображениях движущегося автомобиля.
Опционально, как видно на Фиг. 4, автомобиль может выполнять описанный выше шаг 202 посредством APA ECU 403.
Шаг 203: определение конечной траектории парковки автомобиля в соответствии с каждой из траекторий движения.
Опционально, в последовательность выполнения вышеописанного шага 203 может входить следующее действие: определение посредством алгоритмов SLAM конечной траектории для парковки автомобиля в соответствии с каждой траекторией движения.
Согласно данному примеру реализации настоящего раскрытия, автомобиль может сначала на конечном этапе алгоритма SLAM в соответствии с каждой траекторией движения провести ее оптимизацию, затем на конечном этапе алгоритма SLAM подвергнуть картографированию каждую оптимизированную траекторию и дистанции от камеры кругового обзора и в конечном итоге определить конечную траекторию для парковки автомобиля.
Опционально, как видно на Фиг. 4, автомобиль может выполнять описанный выше шаг 203 посредством APA ECU 403.
Шаг 204: сохранение информации о конечной траектории парковки автомобиля.
Согласно данному примеру реализации настоящего раскрытия, автомобиль сохраняет все ключевые точки и дескрипторы, соответствующие характерным точкам на вышеупомянутой конечной траектории парковки, а также изображения начальной и конечной точек данной траектории в библиотеку облаков точек на карте, созданной алгоритмами SLAM.
Опционально, как видно на Фиг. 4, автомобиль может выполнять описанный выше шаг 204 посредством APA ECU 403.
Шаг 205: выбор из по меньшей мере одной предварительно сохраненной траектории конечной траектории для парковки автомобиля.
Согласно данному примеру реализации настоящего раскрытия, в последовательность выполнения вышеописанного шага 205 могут входить следующие действия:
Шаг 2051: отображение интерфейса системы интеллектуальной парковки с изображениями начальной и конечной точек каждой траектории для парковки.
Согласно данному примеру реализации настоящего раскрытия, в автомобиле может отображаться интерфейс управления интеллектуальной парковкой, в котором имеются изображения начальной и конечной точек каждой траектории парковки, дающие пользователю наглядное представление о том, какому месту соответствует та или иная траектория для парковки автомобиля.
Например, как видно на Фиг. 3, в интерфейсе управления интеллектуальной парковкой 30 имеются кнопки «Маршрут 1» 302 и «Маршрут 2» 303, причем опция «Маршрут 1» 302 содержит в себе изображение начальной точки данной траектории парковки A и изображение конечной точки B, а «Маршрут 2» 303 - изображение начальной точки данной траектории парковки C и изображение конечной точки D.
Шаг 2052: прием в интерфейсе системы интеллектуальной парковки команды о парковке.
Согласно данному примеру реализации настоящего раскрытия, в интерфейсе управления интеллектуальной парковкой имеет опция воспроизведения траектории парковки, при выборе пользователем которой подается команда о парковке.
Опционально, как видно на Фиг. 4, автомобиль может выполнять описанный выше шаг 206 посредством APA ECU 403.
Шаг 2053: выбор из по меньшей мере одной предварительно сохраненной траектории конечной траектории для парковки автомобиля.
Согласно данному примеру реализации настоящего раскрытия, после того как пользователем выбрана опция воспроизведения траектории парковки, в интерфейсе управления интеллектуальной парковкой напротив начальной и конечной точек каждой траектории парковки отображается опция «Парковаться по данному маршруту». Пользователь может нажать кнопку «Парковаться по данному маршруту» напротив нужной ему траектории парковки и тем самым выбрать конечную траекторию для парковки своего автомобиля.
Например, как видно на Фиг. 3, в интерфейсе управления интеллектуальной парковкой 30 имеется кнопка «Парковаться по данному маршруту» 304, перед нажатием которой пользователь может выбрать наиболее подходящую из траекторий для парковки автомобиля по изображениям их начальных и конечных точек, а после того, как такая траектория выбрана, нажать опцию «Парковаться по данному маршруту», причем выбранная траектория станет конечной траекторией парковки.
Далее, как видно на Фиг. 3, в интерфейсе управления интеллектуальной парковкой 30 также имеется кнопка «Удалить маршрут» 305, нажатием которой пользователь может удалить ту или иную траекторию парковки.
Опционально, как видно на Фиг. 4, автомобиль может выполнять описанный выше шаг 205 посредством дисплейного блока 402 и APA ECU 403.
Опционально, если информацией о местоположении точки на конечной траектории парковки является информация, предоставленная системой глобального позиционирования (Global Positioning System, GPS), то это означает, что в автомобиле включена функция определения местоположения GPS, а автомобиль снова прибыл в место, находящееся недалеко от точки на конечной траектории парковки, позиционированной системой GPS. Одновременно с этим, если скорость движения автомобиля ниже заданной, то данная конечная траектория парковки будет автоматически согласована с текущим местоположением автомобиля, при этом в интерфейсе управления интеллектуальной парковкой отображается напоминание, которое может выглядеть следующим образом: «Недалеко от вас обнаружены предварительно сохраненные траектории движения автомобиля, продолжайте ехать на низкой скорости!», а заданная скорость автомобиля может составлять 20 км/ч. Настоящим раскрытием в данном отношении не ставятся какие-либо ограничения.
Опционально, как видно на Фиг. 4, в систему рассматриваемого автомобиля входит система GPS 404, соединенная с центральной системой М и предназначенная для определения и контроля местоположением. Автомобиль может посредством системы GPS 404 выполнять этап согласования с применением навигатора.
Шаг 206: определение наиболее близкой к автомобилю конечной точки на конечной траектории для парковки автомобиля.
Согласно данному примеру реализации настоящего раскрытия, в последовательность выполнения вышеописанного шага 206 могут входить следующие действия:
Шаг 2061: проверка параметров автомобиля, к которым относится по меньшей мере один из следующих параметров: давление в шинах, состояние дверей и состояние зеркала заднего вида.
Согласно данному примеру реализации настоящего раскрытия, в целях повышения уровня безопасности во время вождения необходимым является измерение параметров автомобиля, к которым относятся давление в шинах и состояние дверей, зеркала заднего вида, камеры кругового обзора.
Опционально, как видно на Фиг. 4, в систему рассматриваемого автомобиля входит в том числе электронный блок управления с модулем контроля кузова (Body Control Module, BCM) 405, соединенным с центральной системой М и предназначенным главным образом для отправки сообщений о результатах проверки состояния дверей автомобиля и контроля состоянием автомобильных дверных замков, кроме того, посредством BCM 405 можно проверять состояние дверей автомобиля.
Шаг 2062: определение наиболее близкой к автомобилю конечной точки на конечной траектории для парковки автомобиля, если параметры автомобиля отвечают заданным условиям.
Согласно данному примеру реализации настоящего раскрытия, давление в шинах должно быть меньше или равно 1,8 Па (Pa), двери должны быть в закрытом состоянии, а зеркало заднего вида - в развернутом состоянии. Кроме того, закрытая часть камеры кругового обзора должна быть меньше или равна 30%. В отношении заданного значения давления в шинах и степени закрытия камеры кругового обзора настоящим раскрытием не ставятся какие-либо ограничения.
Помимо этого, автомобиль может путем расчетов и сравнений определить наиболее близкую к автомобилю конечную точку на конечной траектории парковки. Если существует более чем одна такая точка, то на основе текущего направления движения автомобиля и параметров окружающей обстановки должна быть определена единственная конечная точка, являющаяся наиболее близкой к автомобилю.
Опционально, если параметры автомобиля не отвечают заданным условиям, то выводится информация об ошибке.
Например, если давление в шинах выше 1,8 Па, то информация об ошибке будет выглядеть следующим образом: «Давление в шинах превышает норму, невозможно продолжать автоматическую парковку!» Если двери автомобиля находятся в открытом состоянии, то информация об ошибке будет выглядеть следующим образом: «Двери открыты, невозможно продолжать автоматическую парковку!» Если зеркало заднего вида находится в свернутом состоянии, то информация об ошибке будет выглядеть следующим образом: «Зеркало заднего вида свернуто, невозможно продолжать автоматическую парковку!» Если площадь закрытой части камеры кругового обзора превышает 30%, то информация об ошибке будет выглядеть следующим образом: «Камера кругового обзора закрыта, невозможно продолжать автоматическую парковку!»
Опционально, как видно на Фиг. 4, в систему рассматриваемого автомобиля также входит система электронного контроля устойчивости кузова (Electronic Stability Program, ESP) 406, соединенная с центральной системой М и отвечающая главным образом за сообщение данных о дистанции движения автомобиля и приведение в действие руля. Таким образом, автомобиль может посредством ESP 406 выполнять шаг 206 и определять наиболее близкую к автомобилю конечную точку на конечной траектории парковки.
Шаг 207: отправка водителю автомобиля напоминания о необходимости переместить автомобиль в конечную точку, если взаимное расположение автомобиля и конечной точки отвечает условию близости.
Согласно данному примеру реализации настоящего раскрытия, в последовательность выполнения вышеописанного шага 207 могут входить следующие действия:
Шаг 2071: определение фактического расстояния между текущим местоположением автомобиля и конечной точкой.
Согласно данному примеру реализации настоящего раскрытия, таким фактическим расстоянием может быть длина прямой линии, соединяющей текущее местоположение автомобиля и конечную точку.
На Фиг. 5 схематически представлен предложенный примером реализации 2 настоящего раскрытия участок, на котором указаны текущее местоположение автомобиля и конечная точка, причем, как видно на Фиг. 5, фактическое расстояние между текущим местоположением автомобиля 501 и конечной точкой 502 обозначается буквой «D».
Опционально, как видно на Фиг. 4, автомобиль может выполнять описанный выше шаг 2071 посредством APA ECU 403.
Шаг 2072: определение первой дистанции отображения фактического расстояния в первом направлении, причем первым направлением является направление касательной конечной траектории парковки в конечной точке.
Например, как видно на Фиг. 5, если первое направление X является направлением касательной конечной траектории парковки S в конечной точке 502, то первая дистанция отображения фактического расстояния D в первом направлении X обозначается, как видно на Фиг. 5, «L1».
Опционально, как видно на Фиг. 4, автомобиль может выполнять описанный выше шаг 2072 посредством APA ECU 403.
Шаг 2073: определение второй дистанции отображения фактического расстояния во втором направлении, причем второе направление перпендикулярно по отношению к первому.
Например, если, как видно на Фиг. 5, второе направление Y перпендикулярно по отношению к первому направлению X, то вторая дистанция отображения фактического расстояния D во втором направлении Y обозначается, как видно на Фиг. 5, «L2».
Опционально, как видно на Фиг. 4, автомобиль может выполнять описанный выше шаг 2073 посредством APA ECU 403.
Шаг 2074: определение курсового угла между текущим направлением движения автомобиля и первым направлением.
Например, как видно на Фиг. 5, курсовым углом Q является угол между текущим направлением движения автомобиля E и первым направлением X.
Опционально, как видно на Фиг. 4, в систему рассматриваемого автомобиля также входит система электрического усилителя руля (Electric Power Steering, EPS) 407, соединенная с центральной системой М и предназначенная главным образом для приведения в действие руля и сообщения в APA ECU 403 данных об угле его поворота. Таким образом, автомобиль может посредством EPS 407 выполнять шаг 2074, определяя курсовой угол между текущим направлением движения автомобиля и первым направлением.
Шаг 2075: отправка водителю автомобиля сообщения с напоминанием о необходимости доехать до конечной точки, если первая дистанция меньше или равна первому заданному значению, либо вторая дистанция меньше или равна второму заданному значению, либо курсовой угол меньше или равен третьему заданному значению, т.е. если удовлетворяется по меньшей мере одно из данных трех условий.
Согласно данному примеру реализации настоящего раскрытия, первое заданное значение может быть расстоянием от конечной траектории движения менее чем в несколько сотен метров, второе заданное значение может равняться 50 см, а третье заданное значение может равняться 5 градусам. В данном отношении настоящим раскрытием не ставятся какие-либо ограничения. Если первая дистанция меньше или равна первому заданному значению, либо вторая дистанция меньше или равна второму заданному значению, либо курсовой угол меньше или равен третьему заданному значению, т.е. если текущее местоположение автомобиля удовлетворяет по меньшей мере одному из данных трех условий, то в интерфейсе управления интеллектуальной парковкой отображается напоминание водителю о необходимости переместить автомобиль в конечную точку. Такое напоминание может выглядеть следующим образом: «Чтобы доехать до конечной точки, проезжайте 100 метров прямо вперед на низкой скорости». В отношении текстового содержания напоминания настоящим раскрытием не ставятся какие-либо ограничения.
Опционально, как видно на Фиг. 4, автомобиль может выполнять описанный выше шаг 2075 посредством APA ECU 403.
Шаг 208: управление процессом парковки автомобиля, совершаемым по конечной траектории парковки начиная с конечной точки после того, как автомобиль достигает данной точки.
Согласно данному примеру реализации настоящего раскрытия, в последовательность выполнения вышеописанного шага 208 могут входить следующие действия:
Шаг 2081: выведение напоминания о необходимости тормозить автомобиль в конечной точке.
Согласно данному примеру реализации настоящего раскрытия, такое напоминание выводится автомобилем в интерфейсе управления интеллектуальной парковкой и служит для указания пользователю необходимости тормозить автомобиль в конечной точке. Такое напоминание может выглядеть следующим образом: «Чтобы обеспечить безопасность при автоматической парковке, нажмите на тормоз».
Опционально, как видно на Фиг. 4, в систему рассматриваемого автомобиля также входит блок управления коробкой передач (Transmission Control Unit, TCU) 408, соединенный с центральной системой М и предназначенный главным образом для сообщения в APA ECU 403 информации о текущей передаче и переключения передач. Таким образом, автомобиль может посредством TCU 408 выполнять шаг 2081, т.е. затормозить, после того как выведено напоминание о необходимости тормозить в конечной точке.
Шаг 2082: управление процессом парковки, совершаемым по конечной траектории парковки начиная с конечной точки, когда автомобиль доезжает до конечной точки и его скорость определяется как нулевая.
Кроме того, при нулевой скорости автомобиль может безопасно выполнить автоматический паркинг.
Опционально, в последовательность выполнения вышеописанного шага 2082 могут входить следующие действия:
Во-первых, когда автомобиль доезжает до конечной точки и его скорость определяется как нулевая, выводится напоминание о том, что необходимо выбрать режим парковки.
Согласно данному примеру реализации настоящего раскрытия, когда автомобиль доезжает до конечной точки и его скорость определяется как нулевая, в интерфейсе управления интеллектуальной парковкой автомобиля отображается напоминание о том, что необходимо выбрать режим парковки, причем такой режим парковки может включать в себя модель воспроизведения внутри автомобиля и модель дистанционного воспроизведения.
Во-вторых, в выбранном автомобилем режиме парковки его парковка совершается по конечной траектории для парковки.
Согласно данному примеру реализации настоящего раскрытия, под моделью воспроизведения внутри автомобиля понимается такая модель, когда состояние автомобиля управляется пользователем, находящимся внутри салона, при этом парковка совершается по конечной траектории для парковки, а после завершения процесса парковки пользователю остается выполнить за автомобиль некоторые завершающие действия, такие как глушение и блокировка двигателя. Под моделью дистанционного воспроизведения понимается такая модель, когда пользователь может, выйдя из автомобиля, контактировать с ним и управлять процессом его парковки по конечной траектории парковки посредством Блютуз-ключа, а после завершения процесса парковки пользователь может дистанционно заглушить и заблокировать двигатель автомобиля.
Опционально, как видно на Фиг. 4, в систему рассматриваемого автомобиля также входит система пассивного доступа и пассивного пуска (Passive Entry Passive Start, PEPS) 409, соединенная с центральной системой М и взаимодействующая с BCM 405. Система PEPS 409 отвечает главным образом за контроль переключений в системе питания, зажигания и запуска двигателя, контроль противоугонной системы, а также прием и приведение в исполнение команд ключа. Таким образом, посредством системы PEPS 409 можно глушить и блокировать двигатель автомобиля.
Опционально, как видно на Фиг. 4, в систему рассматриваемого автомобиля также входят Блютуз-модуль 410 и Блютуз-ключ 411. Блютуз-ключ может представлять собой ключ мобильного оконечного устройства, Блютуз-модуль 410 соединен с центральной системой М, а Блютуз-ключ 411 соединен с Блютуз-модулем 410. Роль Блютуз-модуля 410 заключается главным образом в предоставлении среды для взаимодействия, в которой происходят прием и отправка информационных сообщений в упомянутое мобильное оконечное устройство, а роль Блютуз-ключа 411 - в отправке сигналов о блокировке или разблокировке, а также отправке команд о парковке. Кроме того, между Блютуз-ключом 411 и системой PEPS 409 происходит обмен информацией. Таким образом, в случае выбора модели дистанционного воспроизведения парковка может выполняться посредством Блютуз-модуля 410, Блютуз-ключа 411 и APA ECU 403.
Например, на Фиг. 6 схематически представлен процесс передачи команды о выполнении парковки по модели дистанционного воспроизведения, предложенный примером реализации 2 настоящего раскрытия. Как показано на Фиг. 6, в случае выбора пользователем 601 модели дистанционного воспроизведения сигнал о выборе режима парковки с дистанционным управлением поступает в систему головного устройства (Head Unit, HU) 602 и далее передается мультимедийным монитором 602 в систему паркинга высокой степени автоматизации (Highly Automated Parking, HAP) 603, после чего система автоматизированной парковки 603 направляет в Блютуз-модуль (Bluetooth module, BTM) 604 запрос на совершение парковки с дистанционным управлением, при этом пользователь 601 открывает на своем мобильном оконечном устройстве Блютуз-приложение (Application, APP) 605, которое вместе с Блютуз-модулем 604 выдает запрос о подключении и аутентификации, Блютуз-модуль 604 присылает Блютуз-приложению 605 ответ с уведомлением об успешной аутентификации и системе автоматизированной парковки 603 информацию о подключении Блютуз-приложения 605, после чего система автоматизированной парковки 603 запрашивает у Блютуз-модуля 604 разрешение начать парковку, Блютуз-модуль 604 направляет в Блютуз-приложение 605 команду о передаче сообщения в интерфейс управления парковкой, Блютуз-приложение 605 присылает Блютуз-модулю 604 ответ о том, что сообщение уже передано в интерфейс управления парковкой, пользователь 601 непрерывно проскальзывает пальцем по экрану мобильного телефона, Блютуз-приложение 605 сообщает Блютуз-модулю 604 о том, что пользователь непрерывно проскальзывает пальцем по экрану мобильного телефона, Блютуз-модуль 604 сообщает системе автоматизированной парковки 603 информацию о контроле действий пользователя, система автоматизированной парковки 603 сообщает Блютуз-модулю 604 о готовности к автоматической парковке, Блютуз-модуль 604 направляет Блютуз-приложению 605 уведомление о переходе в интерфейс, в котором отображается процесс парковки, система автоматизированной парковки 603 начинает парковать автомобиль по конечной траектории парковки, а по завершении паркинга система автоматизированной парковки 603 сообщает Блютуз-модулю 604 об успешном въезде в парковочное место, Блютуз-модуль 604 подает в Блютуз-приложение запрос о переключении на интерфейс, в котором отображается результат успешного паркинга, и запрашивает у пользователя подтверждения глушения двигателя, пользователь 601 направляет в Блютуз-приложение 605 подтверждение глушения двигателя, Блютуз-приложение 605 подает Блютуз-модулю 604 команду о глушении двигателя, Блютуз-модуль 604 подает автомобилю команду о глушении двигателя, поднятии окон и блокировке дверей.
Опционально, как видно на Фиг. 4, автомобиль может выполнять описанный выше шаг 2082 посредством APA ECU 403.
Шаг 2083: остановка движения автомобиля в случаях, когда во время его парковки по конечной траектории парковки начиная с конечной точки поступают сигналы о совершении человеком аварийных операций.
Согласно данному примеру реализации настоящего раскрытия, под аварийной операцией, совершаемой человеком, может пониматься торможение пользователем автомобиля. В данном отношении настоящим раскрытием не ставятся какие-либо ограничения.
Опционально, как видно на Фиг. 4, к датчикам относятся датчик ремня безопасности и датчик присутствия человека в водительском сидении, используемые главным образом для передачи информации о состоянии пользователя, находящегося в салоне автомобиля, в APA ECU 403 для анализа и установления намерений пользователя. В данной связи автомобиль может выполнять описанный выше шаг 2083 посредством датчика 401 и останавливаться, когда поступают сигналы о совершении человеком аварийных операций.
Шаг 2084: возобновление процесса парковки по конечной траектории для парковки после поступления сигнала о том, что ошибка устранена.
Например, когда пользователь тормозит и ставит автомобиль в режим P, автомобиль должен остановиться, при этом в интерфейсе управления интеллектуальной парковкой 30 может быть отображена информация об ошибке, которая может выглядеть следующим образом: «Автомобиль поставлен пользователем в режим P, невозможно продолжать автоматическую парковку!» Когда пользователь переключает автомобиль на переднюю передачу (Drive, D), т.е. когда автомобиль получает сигнал о том, что ошибка устранена, он возвращается в место, в котором было приостановлено его движение, и возобновляет процесс парковки по конечной траектории для парковки автомобиля.
Опционально, при поступлении сигнала о том, что ошибка не устранена, отображается информация об ошибке.
Например, когда ошибка возникает в результате торможения и постановки автомобиля в режим P, информация об ошибке может отображаться в следующем виде: «Автомобиль поставлен пользователем в режим P, невозможно продолжать автоматическую парковку!»
Опционально, как видно на Фиг. 4, автомобиль может выполнять описанный выше шаг 2084 посредством APA ECU 403.
Опционально, как видно на Фиг. 4, в систему рассматриваемого автомобиля входит в том числе встроенный контроллер (Embedded Controller, EC) 412, соединенный с центральной системой М и предназначенный главным образом для выполнения функции независимого контроля определенных элементов.
Согласно данному примеру реализации настоящего раскрытия, при поступлении в автомобиль команды об обучении траекториям производится большое количество изображений движущегося автомобиля и определяется траектория движения по меньшей мере одного характерного предмета, находящегося на участке движения автомобиля, на изображениях движущегося автомобиля, затем в соответствии с каждой из траекторий движения определяется конечная траектория парковки автомобиля и сохраняется информация о ней. Таким образом, водитель может, обучаясь траекториям, сохранять в память автомобиля информацию о многочисленных траекториях парковки и применять функцию автоматизированного паркинга в разных местах с различной обстановкой. Далее, автомобиль выбирает из, по меньшей мере, одной предварительно сохраненной траектории конечную траекторию для парковки и определяет наиболее близкую к автомобилю конечную точку на данной траектории. Если взаимное расположение автомобиля и конечной точки отвечает условию близости, т.е. когда автомобиль находится на близлежащем к конечной траектории парковки участке, водителю автомобиля отправляется сообщение с напоминанием о необходимости переместить автомобиль в упомянутую конечную точку, а когда автомобиль достигает данной точки, он начинает парковаться по конечной траектории для парковки с конечной точки. Таким образом, водителю достаточно доехать до близлежащего к конечной траектории парковки участка, чтобы автомобиль мог парковаться с помощью системы интеллектуальной парковки. Согласно данному примеру реализации настоящего раскрытия, автомобиль может быть припаркован способом интеллектуальной парковки с более далекого расстояния, и для начала автоматического паркинга водителю не требуется подъезжать к месту, располагающемуся спереди парковочного места и вплотную к нему. Такая возможность освобождает водителя от необходимости совершать множество маневров для того, чтобы автомобиль был автоматически припаркован, позволяет сокращать продолжительность вождения и повышать комфортность во время парковки.
Пример реализации 3
На Фиг. 7 представлен чертеж конструкции устройства для реализации способа интеллектуальной парковки, предложенного примером реализации 3 настоящего раскрытия. Данное устройство для реализации способа интеллектуальной парковки 700 включает в себя:
Первый модуль подтверждения 701, предназначенный для выбора из, по меньшей мере, одной предварительно сохраненной траектории конечной траектории для парковки автомобиля;
Второй модуль подтверждения 702, предназначенный для определения наиболее близкой к автомобилю конечной точки на конечной траектории для парковки автомобиля;
Модуль отправки 703, предназначенный для отправки водителю автомобиля напоминания о необходимости переместить автомобиль в конечную точку, если взаимное расположение автомобиля и конечной точки отвечает условию близости;
Контрольный модуль 704, предназначенный для управления процессом парковки автомобиля, совершаемым по конечной траектории парковки от конечной точки после того, как автомобиль достигает данной точки.
Конкретные способы реализации каждого из модулей, представленных в данном примере реализации настоящего раскрытия, подробно изложены в разделе описания способа интеллектуальной парковки, в связи с чем в дальнейшем подробно речи о них не пойдет.
Согласно данному примеру реализации настоящего раскрытия, автомобиль посредством первого модуля подтверждения выбирает из, по меньшей мере, одной предварительно сохраненной траектории конечную траекторию для парковки и посредством второго модуля подтверждения определяет наиболее близкую к автомобилю конечной точки на данной траектории. Затем, если взаимное расположение автомобиля и конечной точки отвечает условию близости, т.е. когда автомобиль находится на близлежащем к конечной траектории парковки участке, водителю автомобиля посредством модуля отправки отправляется сообщение с напоминанием о необходимости переместить автомобиль в упомянутую конечную точку, а когда автомобиль достигает данной точки, он начинает под действием контрольного модуля парковаться по конечной траектории для парковки с конечной точки. Таким образом, водителю достаточно доехать до близлежащего к конечной траектории парковки участка, чтобы автомобиль мог парковаться с помощью системы интеллектуальной парковки. Согласно данному примеру реализации настоящего раскрытия, автомобиль может быть припаркован способом интеллектуальной парковки с более далекого расстояния, и для начала автоматического паркинга водителю не требуется подъезжать к месту, располагающемуся спереди парковочного места и вплотную к нему. Такая возможность освобождает водителя от необходимости совершать множество маневров для того, чтобы автомобиль был автоматически припаркован, позволяет сокращать продолжительность вождения и повышать комфортность во время парковки.
Пример реализации 4
На Фиг. 8 представлен чертеж конструкции устройства для реализации способа интеллектуальной парковки, предложенного примером реализации 4 настоящего раскрытия. Данное устройство для реализации способа интеллектуальной парковки 800 включает в себя:
Первый модуль подтверждения 801, предназначенный для выбора из по меньшей мере одной предварительно сохраненной траектории конечной траектории для парковки автомобиля;
Второй модуль подтверждения 802, предназначенный для определения наиболее близкой к автомобилю конечной точки на конечной траектории для парковки автомобиля;
Модуль отправки 803, предназначенный для отправки водителю автомобиля напоминания о необходимости переместить автомобиль в конечную точку, если взаимное расположение автомобиля и конечной точки отвечает условию близости;
Контрольный модуль 804, предназначенный для управления процессом парковки автомобиля, совершаемым по конечной траектории парковки начиная конечной точки после того, как автомобиль достигает данной точки.
Опционально, как видно на Фиг. 8, представляемое устройство для реализации способа интеллектуальной парковки 800 включает в себя, помимо прочего:
Модуль фотографии 805, предназначенный для производства большого количества изображений движущегося автомобиля при поступлении команды об обучении траекториям;
Третий модуль подтверждения 806, предназначенный для определения траектории движения по меньшей мере одного характерного предмета, находящегося на участке движения автомобиля, на изображениях движущегося автомобиля;
Четвертый модуль подтверждения 807, предназначенный для определения конечной траектории парковки автомобиля в соответствии с каждой из траекторий движения;
Модуль памяти 808, предназначенный для хранения конечной траектории парковки.
Опционально, как видно на Фиг. 8, модуль отправки 803 включает в себя:
Первый подмодуль подтверждения 8031, предназначенный для определения фактического расстояния между текущим местоположением автомобиля и конечной точкой;
Второй подмодуль подтверждения 8032, предназначенный для определения первой дистанции отображения фактического расстояния в первом направлении, причем первым направлением является направление касательной конечной траектории парковки в конечной точке;
Третий подмодуль подтверждения 8033, предназначенный для определения второй дистанции отображения фактического расстояния во втором направлении, причем второе направление перпендикулярно по отношению к первому;
Четвертый подмодуль подтверждения 8034, предназначенный для определения курсового угла между текущим направлением движения автомобиля и первым направлением;
Подмодуль отправки 8035, предназначенный для отправления водителю автомобиля сообщения с напоминанием о необходимости доехать до конечной точки, если первая дистанция меньше или равна первому заданному значению, либо вторая дистанция меньше или равна второму заданному значению, либо курсовой угол меньше или равен третьему заданному значению, т.е. если удовлетворяется по меньшей мере одно из данных трех условий.
Опционально, как видно на Фиг. 8, представляемое устройство для реализации способа интеллектуальной парковки 800 включает в себя, помимо прочего:
Модуль вывода 809, предназначенный для выведения напоминания о необходимости тормозить автомобиль в конечной точке;
Контрольный модуль 804 включает в себя:
Первый контрольный подмодуль 8041, предназначенный для управления процессом парковки, совершаемым по конечной траектории парковки начиная с конечной точки, когда автомобиль доезжает до конечной точки и его скорость определяется как нулевая.
Опционально, как видно на Фиг. 8, второй модуль подтверждения 802 включает в себя:
Подмодуль измерения 8021, предназначенный для проверки параметров автомобиля, к которым относится по меньшей мере один из следующих параметров: давление в шинах, состояние дверей и состояние зеркала заднего вида;
Пятый подмодуль подтверждения 8022, предназначенный для определения наиболее близкой к автомобилю конечной точки на траектории для парковки автомобиля, если параметры автомобиля отвечают заданным условиям.
Конкретные способы реализации каждого из модулей, представленных в данном примере реализации настоящего раскрытия, подробно изложены в разделе описания способа интеллектуальной парковки, в связи с чем в дальнейшем подробно речи о них не пойдет.
Согласно данному примеру реализации настоящего раскрытия, при поступлении в автомобиль команды об обучении траекториям посредством модуля фотографии производится большое количество изображений движущегося автомобиля и посредством третьего модуля подтверждения определяется траектория движения по меньшей мере одного характерного предмета, находящегося на участке движения автомобиля, на изображениях движущегося автомобиля, затем в соответствии с каждой из траекторий движения посредством четвертого модуля подтверждения определяется конечная траектория парковки автомобиля и напоследок посредством модуля памяти сохраняется информация о конечной траектории парковки. Таким образом, водитель может путем обучения траекториям сохранять в память автомобиля информацию о многочисленных траекториях парковки и применять функцию автоматизированного паркинга в разных местах с различной обстановкой. Далее, посредством первого модуля подтверждения автомобиль выбирает из по меньшей мере одной предварительно сохраненной траектории конечную траекторию для парковки и посредством второго модуля подтверждения определяет наиболее близкую к автомобилю конечной точки на данной траектории. Затем, если взаимное расположение автомобиля и конечной точки отвечает условию близости, т.е. когда автомобиль находится на близлежащем к конечной траектории парковки участке, водителю автомобиля посредством модуля отправки отправляется сообщение с напоминанием о необходимости переместить автомобиль в упомянутую конечную точку, а когда автомобиль достигает данной точки, он начинает под управлением контрольного модуля парковаться по конечной траектории для парковки с конечной точки. Таким образом, водителю достаточно доехать до близлежащего к конечной траектории парковки участка, чтобы автомобиль мог парковаться с помощью системы интеллектуальной парковки. Согласно данному примеру реализации настоящего раскрытия, автомобиль может быть припаркован способом интеллектуальной парковки с более далекого расстояния, и для начала автоматического паркинга водителю не требуется подъезжать к месту, располагающемуся спереди парковочного места и вплотную к нему. Такая возможность освобождает водителя от необходимости совершать множество маневров для того, чтобы автомобиль был автоматически припаркован, позволяет сокращать продолжительность вождения и повышать комфортность во время парковки.
Приведенные выше примеры являются примерами оптимальных вариантов применения настоящего раскрытия, но не ставят каких-либо границ в его реализации. Любые изменения, адекватные замены или доработки, проделанные с настоящим раскрытием без нарушения его основной идеи и принципов, являются объектами патентных прав и подлежат охране в рамках настоящей заявки.
Вышеописанные примеры реализации устройств служат лишь в качестве средства наглядности, причем под разделением элементов, описанных как отдельные части, может иметься в виду как физическое, так и нефизическое разделение, элементами, служащими для отображения блоков, могут быть как физические, так и нефизические блоки, т.е. элементы могут находиться в одном месте, а могут и быть распределены по разным сетевым блокам. Задачи, поставленные данным примером реализации раскрытия, могут выполняться с применением всех или части модулей, выбранных в соответствии с фактическими потребностями реализующего. Технические работники данной области могут без созидательного труда понять и реализовать данные примеры.
Примеры реализации различных частей настоящего раскрытия могут осуществляться посредством аппаратного обеспечения или модулей программного обеспечения, функционирующих в одном или нескольких процессорах, или же одновременно посредством и того, и другого. Технические работники данной сферы должны понимать, что все или часть функций всех или части элементов вычислительно-обрабатывающего оборудования, представленного в примере реализации настоящего раскрытия, могут на практике выполняться микропроцессорами или цифровыми сигнальными процессорами (DSP). Кроме того, в рамках настоящего раскрытия также могут быть реализованы программы (например, компьютерные программы и их продукты) всех или части оборудования или устройств, используемых для реализации описываемого в настоящей заявке средства. Такие программы для реализации настоящего раскрытия могут храниться в машинно-считываемой среде или быть в форме одного или множества сигналов, которые можно скачать с Интернет сайтов, а также предоставить на носителях сигналов или в любой иной форме.
Например, на Фиг. 9 представлено вычислительно-обрабатывающее оборудование, с помощью которого реализуется средство, представляемое настоящим раскрытием. Традиционно такое вычислительно-обрабатывающее оборудование состоит из процессора 1010 и компьютерной программы или машинно-считываемой среды в виде запоминающего устройства 1020. Запоминающим устройством 1020 может служить электронное запоминающее устройство, такое как флэш-память, EEPROM (электрически стираемое перепрограммируемое постоянное запоминающее устройство), EPROM (полупроводниковое запоминающее устройство для программирования), жесткий диск или ROM (постоянное запоминающее устройство). В запоминающем устройстве 1020 имеется пространство 1030 для накопления программных кодов 1031, используемых для реализации любых из шагов применения вышеописанного средства. Например, пространство 1030 для накопления программных кодов может содержать в себе программные коды 1031, используемые для реализации каждого шага применения предложенного средства. Данные программные коды могут быть считаны или введены из одного или нескольких продуктов компьютерных программ в один или несколько продуктов компьютерных программ, к которым относятся такие носители программных кодов, как жесткие диски, компакт-диски (CD), карты памяти или магнитные диски. Чаще всего в качестве такого продукта компьютерной программы используется портативный или фиксированный запоминающий блок, проиллюстрированный на Фиг. 10. В таком запоминающем блоке может быть тот же сегмент или пространство для накопления, подобный запоминающему устройству 1020 в вычислительно-обрабатывающем оборудовании, представленном на Фиг. 9. Программные коды могут быть соответствующим образом сжаты. Обычно запоминающие блоки содержат в себе машинно-считываемые коды 1031’, т. е. коды, считываемые процессорами, подобными процессору 1010. Обрабатывая эти коды, вычислительно-обрабатывающее оборудование реализует все шаги применения вышеописанного средств.
Выражения «пример реализации» или «один или много примеров реализации», встречающиеся в тексте, означают, что особые признаки, структуры или характеристики, собираемые в описании примера/примеров реализации, объединены по меньшей мере в один пример реализации настоящего раскрытия. Кроме того, следует обратить внимание на то, что встречающееся в тексте выражение «в примере реализации» не означает, что существует только один такой пример и речь идет в каждом случае об одном и том же примере.
В настоящей заявке приведено множество конкретных деталей, однако допустимо, если варианты применения объектов настоящего раскрытия будут реализоваться без учета таких деталей. Для того чтобы не усложнять процесс понимания содержания настоящей заявки, в примерах реализации представленного в ней раскрытия не приведены в подробностях общеизвестные способы, конструкции и технологии.
Никакие референтные символы, заключенные в скобки в пунктах Формулы изобретения, не должны использоваться в качестве критериев для установления ограничений в ее отношении. Выражение «состоять из» или «содержать в себе» не исключает возможность существования компонентов или операций, отличных от тех, что перечислены в Формуле изобретения. Называние того или иного компонента в единственном числе вовсе не означает, что более не существует других подобных компонентов. Настоящее раскрытие может быть реализовано посредством аппаратуры с различными компонентами и компьютера с подходящим языком программирования. Различные установки, перечисленные в пунктах Формулы изобретения, могут быть представлены посредством одной и той же аппаратуры. Выражения «во-первых», «во-вторых», «в-третьих» и т. д. не указывают на какую-либо последовательность. Такие выражения могут быть поняты как наименования.
Напоследок следует отметить, что данные примеры реализации служат лишь для описания технических решений, представленных в настоящем раскрытии, и вовсе не ставят на них какие-либо ограничения. Несмотря на то, что в изложенных выше примерах реализации дано детальное описание настоящего раскрытия, рядовые технические работники данной области должны понимать, что они могут вносить в технические решения, представленные в вышеизложенных примерах реализации, те или иные изменения или производить адекватную замену части технических особенностей, если при таких изменениях или заменах не исчезает сущность и не происходит выход за пределы тех технических решений, которые предлагают приведенные в настоящей патентной заявке примеры реализации раскрытия.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматической парковки, а также устройства и системы для его реализации. | 2020 |
|
RU2798256C1 |
| Способ контроля системой автоматизированного паркинга и устройства для его реализации | 2020 |
|
RU2800036C1 |
| БЕСПИЛОТНОЕ ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ЕГО ДВИЖЕНИЕМ | 2022 |
|
RU2809334C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ ОБЪЕКТОВ | 2022 |
|
RU2806452C1 |
| СПОСОБ ДЛЯ НАПОМИНАНИЯ И УСТРОЙСТВО НАПОМИНАНИЯ | 2015 |
|
RU2644410C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОТСЛЕЖИВАНИЯ ОБЪЕКТОВ | 2022 |
|
RU2814813C1 |
| СПОСОБ И ПРИБОР ДЛЯ ИДЕНТИФИКАЦИИ ТИПА ЭЛЕКТРОННОГО УСТРОЙСТВА, ПОДКЛЮЧЕННОГО К ИНТЕЛЛЕКТУАЛЬНОЙ РОЗЕТКЕ | 2016 |
|
RU2658501C2 |
| Способ и устройство для генерирования наводящего сообщения | 2015 |
|
RU2648637C2 |
| СПОСОБ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2015 |
|
RU2703478C1 |
| УПРАВЛЕНИЕ ИСПОЛЬЗОВАНИЕМ ОДНОГО ПАРКОВОЧНОГО ПРОСТРАНСТВА ДЛЯ НЕСКОЛЬКИХ ТРАНСПОРТНЫХ СРЕДСТВ ПОСРЕДСТВОМ ПРИМЕНЕНИЯ МНОЖЕСТВА КАМЕР | 2013 |
|
RU2607043C1 |
Группа изобретений относится к интеллектуальной парковке автомобиля. Устройство для интеллектуальной парковки включает в себя первый модуль подтверждения, второй модуль подтверждения, модуль отправки и контрольный модуль. Первый модуль предназначен для выбора из предварительно сохраненной траектории конечной траектории для парковки автомобиля. Второй модуль предназначен для определения наиболее близкой к автомобилю конечной точки на конечной траектории для парковки автомобиля. Модуль отправки предназначен для отправки водителю автомобиля напоминания о необходимости переместить автомобиль в конечную точку, если взаимное расположение автомобиля и конечной точки отвечает условию близости. Контрольный модуль предназначен для управления процессом парковки автомобиля, совершаемым по конечной траектории парковки начиная с конечной точки после того, как автомобиль достигает данной точки. Достигается возможность автоматической парковки, позволяющей сокращать продолжительность вождения и повышать комфортность во время парковки. 3 н. и 10 з.п. ф-лы, 10 ил.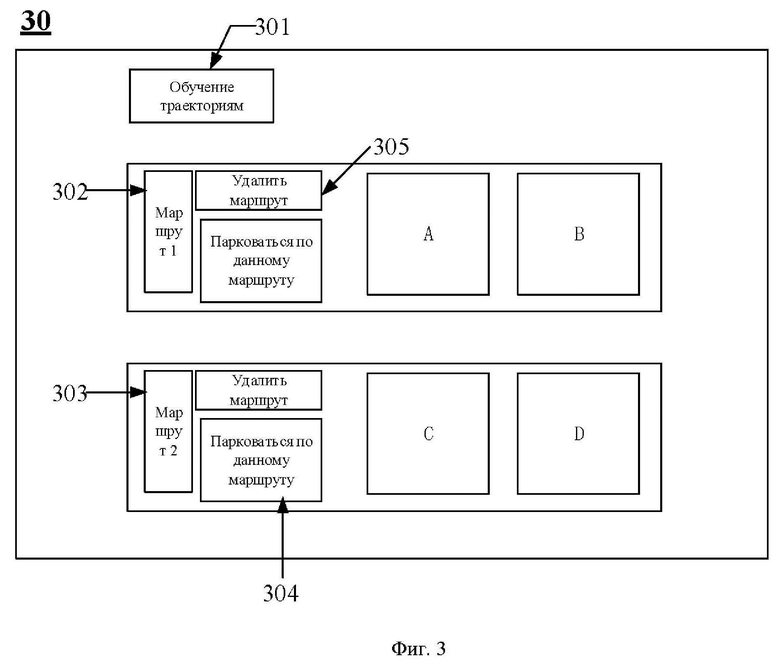
1. Способ интеллектуальной парковки, отличающийся тем, что применяется к автомобилям и включает в себя:
конечную траекторию для парковки автомобиля, выбранную из по меньшей мере одной предварительно сохраненной траектории;
конечную точку на упомянутой конечной траектории для парковки автомобиля, установленную как расположенную наиболее близко к упомянутому автомобилю;
напоминание о необходимости переместить автомобиль в упомянутую конечную точку, отправляемое водителю упомянутого автомобиля, если взаимное расположение упомянутого автомобиля и упомянутой конечной точки отвечает условию близости;
собственно парковку автомобиля, совершаемую по упомянутой конечной траектории парковки начиная с упомянутой конечной точки после того, как упомянутый автомобиль достигает данной точки.
2. Способ по п. 1, отличающийся тем, что этап, предшествующий этапу выбора из по меньшей мере одной предварительно сохраненной траектории конечной траектории для парковки автомобиля, включает в себя, помимо прочего, следующие действия:
производство большого количества изображений движущегося автомобиля при поступлении команды об обучении траекториям;
определение траектории движения по меньшей мере одного характерного предмета, находящегося на участке движения автомобиля, на упомянутых изображениях движущегося автомобиля;
определение конечной траектории парковки автомобиля в соответствии с каждой из упомянутых траекторий движения;
сохранение упомянутой конечной траектории парковки.
3. Способ по п. 2, отличающийся тем, что этап, на котором определяется траектория движения по меньшей мере одного характерного предмета, находящегося на участке движения автомобиля, на упомянутых изображениях движущегося автомобиля, включает в себя также следующие действия:
поиск на упомянутых изображениях движущегося автомобиля элементов изображений с характерными точками и извлечение из упомянутых изображений движущегося автомобиля ключевых точек;
расчет дескрипторов упомянутых характерных точек на основе информации о местоположении упомянутых ключевых точек;
согласование дескрипторов по меньшей мере одной характерной точки участка движения автомобиля на упомянутых изображениях движущегося автомобиля на основе упомянутых дескрипторов упомянутых характерных точек;
регистрация информации о местоположении успешно согласованных дескрипторов и связывание упомянутой информации о местоположении в соответствии с временной последовательностью для получения траектории движения по меньшей мере одной характерной точки участка движения автомобиля на упомянутых изображениях движущегося автомобиля.
4. Способ по п. 2, отличающийся тем, что этап, на котором из по меньшей мере одной предварительно сохраненной траектории выбирается конечная траектория для парковки автомобиля, включает в себя следующие действия:
отображение интерфейса системы интеллектуальной парковки с изображениями начальной и конечной точек каждой траектории для парковки;
прием в интерфейсе системы интеллектуальной парковки команды о парковке;
выбор конечной траектории для парковки автомобиля из по меньшей мере одной предварительно сохраненной траектории;
5. Способ по п. 1, отличающийся тем, что напоминание о необходимости переместить автомобиль в упомянутую конечную точку, отправляемое водителю упомянутого автомобиля, если взаимное расположение упомянутого автомобиля и упомянутой конечной точки отвечает условию близости, содержит в себе:
информацию о фактическом расстоянии между текущим местоположением упомянутого автомобиля и упомянутой конечной точкой;
информацию о первой дистанции отображения упомянутого фактического расстояния в первом направлении, причем первым направлением является направление касательной упомянутой конечной траектории парковки в упомянутой конечной точке;
информацию о второй дистанции отображения упомянутого фактического расстояния во втором направлении, причем упомянутое второе направление перпендикулярно по отношению к упомянутому первому;
информацию о курсовом угле между текущим направлением движения упомянутого автомобиля и упомянутым первым направлением;
если упомянутая первая дистанция меньше или равна первому заданному значению, либо упомянутая вторая дистанция меньше или равна второму заданному значению, либо упомянутый курсовой угол меньше или равен третьему заданному значению, т.е. если удовлетворяется по меньшей мере одно из данных трех условий, то водителю упомянутого автомобиля отправляется сообщение с напоминанием о необходимости доехать до упомянутой конечной точки.
6. Способ по п. 1, отличающийся тем, что этап, предшествующий этапу, когда упомянутый автомобиль доезжает до упомянутой конечной точки и начинает парковаться по упомянутой конечной траектории парковки с упомянутой конечной точки, включает в себя, помимо прочего, следующие действия:
отправка сообщения с напоминанием о необходимости тормозить автомобиль в упомянутой конечной точке;
упомянутый этап, когда упомянутый автомобиль доезжает до упомянутой конечной точки и начинает парковаться по упомянутой конечной траектории парковки с упомянутой конечной точки, включает в себя:
парковку по упомянутой конечной траектории парковки с упомянутой конечной точки, когда автомобиль доезжает до упомянутой конечной точки и его скорость определяется как нулевая.
7. Способ по п. 1, отличающийся тем, что этап, на котором определяется наиболее близкая к упомянутому автомобилю конечная точка на упомянутой конечной траектории для парковки автомобиля, включает в себя:
проверку параметров автомобиля, к которым относится по меньшей мере один из следующих параметров: давление в шинах, состояние дверей и состояние зеркала заднего вида;
определение наиболее близкой к упомянутому автомобилю конечной точки на упомянутой конечной траектории для парковки автомобиля, если упомянутые параметры автомобиля отвечают заданным условиям.
8. Устройство для реализации способа интеллектуальной парковки, отличающееся тем, что включает в себя:
первый модуль подтверждения, предназначенный для выбора из по меньшей мере одной предварительно сохраненной траектории конечной траектории для парковки автомобиля;
второй модуль подтверждения, предназначенный для определения наиболее близкой к упомянутому автомобилю конечной точки на упомянутой конечной траектории для парковки автомобиля;
модуль отправки, предназначенный для отправки водителю упомянутого автомобиля напоминания о необходимости переместить автомобиль в упомянутую конечную точку, если взаимное расположение упомянутого автомобиля и упомянутой конечной точки отвечает условию близости;
контрольный модуль, предназначенный для управления процессом парковки автомобиля, совершаемым по упомянутой конечной траектории парковки начиная с упомянутой конечной точки после того, как упомянутый автомобиль достигает данной точки.
9. Устройство по п. 8, отличающееся тем, что включает в себя, помимо прочего:
модуль фотографии, предназначенный для производства большого количества изображений движущегося автомобиля при поступлении команды об обучении траекториям;
третий модуль подтверждения, предназначенный для определения траектории движения по меньшей мере одного характерного предмета, находящегося на участке движения автомобиля, на упомянутых изображениях движущегося автомобиля;
четвертый модуль подтверждения, предназначенный для определения конечной траектории парковки автомобиля в соответствии с каждой из упомянутых траекторий движения;
модуль памяти, предназначенный для сохранения информации об упомянутой конечной траектории парковки.
10. Устройство по п. 8, отличающееся тем, что упомянутый модуль отправки включает в себя:
первый подмодуль подтверждения, предназначенный для определения фактического расстояния между текущим местоположением упомянутого автомобиля и упомянутой конечной точкой;
второй подмодуль подтверждения, предназначенный для определения первой дистанции отображения упомянутого фактического расстояния в первом направлении, причем первым направлением является направление касательной упомянутой конечной траектории парковки в упомянутой конечной точке;
третий подмодуль подтверждения, предназначенный для определения второй дистанции отображения упомянутого фактического расстояния во втором направлении, причем упомянутое второе направление перпендикулярно по отношению к упомянутому первому;
четвертый подмодуль подтверждения, предназначенный для определения курсового угла между текущим направлением движения упомянутого автомобиля и упомянутым первым направлением;
подмодуль отправки, предназначенный для отправки водителю упомянутого автомобиля сообщения с напоминанием о необходимости доехать до упомянутой конечной точки, если упомянутая первая дистанция меньше или равна первому заданному значению, либо упомянутая вторая дистанция меньше или равна второму заданному значению, либо упомянутый курсовой угол меньше или равен третьему заданному значению, т.е. если удовлетворяется по меньшей мере одно из данных трех условий.
11. Устройство по п. 8, отличающееся тем, что включает в себя, помимо прочего:
модуль вывода, предназначенный для выведения напоминания о необходимости тормозить автомобиль в упомянутой конечной точке;
упомянутый контрольный модуль включает в себя:
первый контрольный подмодуль, предназначенный для управления процессом парковки, совершаемым по упомянутой конечной траектории парковки начиная с упомянутой конечной точки, когда автомобиль доезжает до упомянутой конечной точки и его скорость определяется как нулевая.
12. Устройство по п. 8, отличающееся тем, что второй модуль подтверждения включает в себя:
подмодуль измерения, предназначенный для проверки параметров автомобиля, к которым относится по меньшей мере один из следующих параметров: давление в шинах, состояние дверей и состояние зеркала заднего вида;
пятый подмодуль подтверждения, предназначенный для определения наиболее близкой к упомянутому автомобилю конечной точки на упомянутой конечной траектории для парковки автомобиля, если упомянутые параметры автомобиля отвечают заданным условиям.
13. Вычислительно-обрабатывающее оборудование, отличающееся тем, что включает в себя:
запоминающее устройство, в котором хранятся машинно-считываемые коды;
один или несколько процессоров, во время обработки машинно-считываемых кодов которым или которыми вычислительно-обрабатывающим оборудованием реализуется способ интеллектуальной парковки, упомянутый в любом из пп. 1-7.
| CN 104627175 A, 20.05.2015 | |||
| CN 109278742 A, 29.01.2019 | |||
| CN 109866761 A, 11.06.2019 | |||
| US 2016110619 A1, 21.04.2016 | |||
| US 2018093664 A1, 05.04.2018 | |||
| СИСТЕМА И СПОСОБ (ВАРИАНТЫ) ПАРАЛЛЕЛЬНОЙ ПАРКОВКИ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2702871C2 |
