Содержание притязаний на право приоритета в отношении изобретения под наименованием «Способ контроля системой автоматизированного паркинга и устройства для его реализации», заявка на которое подана в Патентное ведомство КНР 29 ноября 2019 года под номером 201911206068.4, приведено в настоящей патентной заявке в полном объеме посредством цитирования.
Техническая область
Настоящее изобретение касается области автомобилестроения, в частности, способа контроля системой автоматизированного паркинга и устройств для его реализации.
Предыдущий уровень техники
Паркинг автомобиля в городских парковках представляет немалые трудности для лиц, в недостаточной степени владеющих техникой вождения. Однако с развитием автомобильной электроники постепенно все большими автоматизированными системами оборудуются автомобили, в том числе системы автоматизированного паркинга стали важным средством для устранения трудностей при парковке автомобилей.
В настоящее время большинство систем автоматизированного паркинга работает благодаря радиолокационным датчикам и/или датчикам изображения. Являясь составными компонентами систем автоматизированного паркинга, радиолокационные датчики служат главным образом для сбора данных о расстоянии от автомобиля до преград, присутствующих поблизости, а датчики изображения - для сбора различного рода графической информации. Как правило, после включения пользователем системы автоматизированного паркинга автомобиль начинает с помощью радиолокационных датчиков и датчиков изображения собирать данные об обстановке вокруг, определяет точную локацию парковочных мест вблизи автомобиля и генерировать траекторию парковки, по которой он въедет в парковочное место. После подтверждения пользователем намерения парковаться автомобиль начинает автоматически въезжать в парковочное место по сгенерированной траектории парковки.
Однако существующие на сегодняшний день системы автоматизированного паркинга имеют множество недостатков. Во-первых, автомобиль начинает искать место для парковки только после того, как пользователь выбирает и включает систему автоматизированного паркинга, в результате чего им могут быть легко пропущены свободные парковочные места. Во-вторых, автомобиль может идентифицировать только парковочные места общих типов с четкими разметками и не может идентифицировать парковочные места в неоднородных ситуациях, чем обусловливается его низкий коэффициент распознавания мест для парковки. В-третьих, автомобиль может предоставлять на выбор пользователю только одно парковочное место и не в состоянии удовлетворять его потребности в поиске парковочных мест различных типов. Таким образом, имеющиеся на сегодня системы автоматизированного паркинга несовершенны и могут являться причиной пониженного комфорта водителей во время вождения.
Содержание изобретения
Принимая во внимание вышесказанное, целью настоящего изобретения является представление нового способа контроля системой автоматизированного паркинга и устройств для его реализации, которые позволят повысить комфортабельность для водителей во время вождения путем устранения недостатков, имеющихся в существующих технологиях из-за несовершенства систем автоматизированного паркинга, такие как риск проезда мимо свободных парковочных мест, низкий коэффициент распознавания мест для парковки и невозможность удовлетворить потребности водителей в поиске парковочных мест различных типов.
Для того, чтобы достичь вышеизложенной цели, техническое решение, являющееся объектом настоящего раскрытия, реализуется следующим образом:
Способ контроля системой автоматизированного паркинга, применимый к автомобилям, оборудованным датчиками, и включающий в себя:
Графические и радиолокационные данные, собираемые упомянутыми датчиками вокруг упомянутого автомобиля, движущегося со скоростью, значение которой находится в пределах заданного интервала, причем время, в течение которого автомобиль движется со скоростью, значение которой находится в пределах заданного интервала, больше или равно заданному времени;
Информацию об, по меньшей мере, одном парковочном месте, получаемую на выходе заданной модели сверточной нейронной сети, в которую введены упомянутые графические и радиолокационные данные, причем обучение упомянутой модели сверточной нейронной сети осуществляется на основе обучающих графических и радиолокационных данных, собранных с большого количества парковочных мест различных типов;
Если текущая передача, на которой движется автомобиль, является передней или холостой, то информация о конечном месте парковки выбирается из общего потока информации об, по меньшей мере, одном парковочном месте в соответствии с поступившей командой о выборе места для парковки;
На основе упомянутой информации о конечном месте парковки происходит генерация траектории для парковки автомобиля, по которой упомянутый автомобиль автоматически паркуется.
Далее, под упомянутыми датчиками подразумевается множество датчиков изображения и множество радиолокационных датчиков, а упомянутые автомобили оснащены электронными блоками управления и, прежде чем графические и радиолокационные данные собираются упомянутыми датчиками вокруг упомянутых автомобилей в условиях, когда упомянутые автомобили движутся со скоростью, значение которой находится в пределах заданного интервала, причем время, в течение которого автомобиль движется со скоростью, значение которой находится в пределах заданного интервала, больше или равно заданному времени, данный способ также характеризуется следующим:
При запуске упомянутого автомобиля определяется рабочее состояние упомянутых датчиков изображения, радиолокационных датчиков и электронного блока управления, причем различаются исправное и аварийное состояния;
На основе упомянутых рабочих состояний определяется функциональная категория упомянутого автомобиля.
Далее, функциональная категория упомянутого автомобиля может быть любой из четырех (категория нормального функционирования, аварийная категория первой степени, аварийная категория второй степени и аварийная категория третьей степени), а упомянутый этап определения функциональной категории упомянутого автомобиля на основе упомянутых рабочих состояний характеризуется следующим:
Если рабочее состояние упомянутых датчиков изображения, радиолокационных датчиков и электронного блока управления является исправным, то упомянутая функциональная категория автомобиля определяется как упомянутая категория нормального функционирования;
Если рабочее состояние по меньшей мере одного из упомянутых радиолокационных датчиков и/или электронного блока управления является аварийным, то упомянутая функциональная категория автомобиля определяется как упомянутая аварийная категория первой степени;
Если рабочее состояние всех упомянутых датчиков изображения является аварийным, то упомянутая функциональная категория автомобиля определяется как упомянутая аварийная категория второй степени;
Если рабочее состояние некоторых из упомянутых датчиков изображения является аварийным, то упомянутая функциональная категория автомобиля определяется как упомянутая аварийная категория третьей степени.
Далее, упомянутый электронный блок управления используется для управления процессом автоматической парковки упомянутого автомобиля, а после того, как выполнен этап определения функциональной категории упомянутого автомобиля на основе упомянутых рабочих состояний:
Если функциональная категория упомянутого автомобиля определена как упомянутая аварийная категория первой степени, то система подает команду о прекращении функционирования упомянутого электронного блока управления;
Если функциональная категория упомянутого автомобиля определена как упомянутая аварийная категория второй степени, то система подает команду о прекращении функционирования упомянутых датчиков изображения;
Если функциональная категория упомянутого автомобиля определена как упомянутая аварийная категория третьей степени, то система подает команду о прекращении функционирования тех датчиков изображения, упомянутое рабочее состояние которых определено как упомянутое аварийное состояние;
Далее, информация об упомянутом парковочном месте включает с себя один или несколько из любых следующих типов информации: информация о наличии в парковочном месте дорожных конусов, информация о наличии в парковочном месте знаков, запрещающих парковку, информация о наличии в парковочном месте парковочного барьера, информация о наличии в парковочном месте разметок и информация о наличии в парковочном месте преград.
Далее, этап, на котором упомянутые графические и радиолокационные данные вводятся в заданную модель сверточной нейронной сети для получения на выходе упомянутой модели сверточной нейронной сети информации об, по меньшей мере, одном парковочном месте, включает в себя следующие шаги:
Определение упомянутой моделью сверточной нейронной сети упомянутой информации о парковочном месте, в том числе о его категории, на основе введенных в упомянутую модель сверточной нейронной сети упомянутых графических и радиолокационных данных;
Получение на выходе упомянутой модели сверточной нейронной сети упомянутой информации о парковочном месте, в том числе информации о категории парковочного места.
Далее, после того как выполнен этап, на котором упомянутой моделью сверточной нейронной сети на основе введенных в нее упомянутых графических и радиолокационных данных определяется информация о парковочном месте, в том числе о его категории:
Если упомянутое парковочное место является угловым, то упомянутая модель сверточной нейронной сети определяет для упомянутого углового парковочного места направление парковки на основе упомянутых графических и радиолокационных данных;
Упомянутая информация о парковочном месте, получаемая на выходе упомянутой модели сверточной нейронной сети, включает в себя в том числе и информацию о направлении парковки для упомянутого углового парковочного места.
Далее, этап, на котором информация о конечном месте парковки выбирается из информации об, по меньшей мере, одном упомянутом парковочном месте в соответствии с поступившей командой о выборе места для парковки, если текущая передача, на которой движется упомянутый автомобиль, является передней или холостой, включает в себя следующие шаги:
Если в момент поступления сигнала о поиске парковочного места текущая передача, на которой движется упомянутый автомобиль, является упомянутой передней или упомянутой холостой передачей, то отображается интерфейс управления парковкой, содержащий информацию об, по меньшей мере, одном из упомянутых парковочных мест;
При поступлении команды о выборе места для парковки, соответствующей упомянутому интерфейсу управления парковкой, из информации об, по меньшей мере, одном упомянутом парковочном месте в соответствии с поступившей командой о выборе места для парковки выбирается информация о конечном месте парковки.
Далее, после того как выполнен этап, на котором на основе упомянутой информации о конечном месте парковки происходит генерация траектории для парковки автомобиля, по которой упомянутый автомобиль автоматически паркуется:
Если в момент поступления сигнала о поиске парковочного места текущая передача упомянутого автомобиля является парковочной, то с помощью упомянутых датчиков собираются данные об окружающей обстановке вокруг упомянутого автомобиля;
На основе упомянутых данных об окружающей обстановке определяется по меньшей мере одно направление выезда упомянутого автомобиля с места парковки;
Отображается интерфейс управления выездом автомобиля с места парковки, в котором указано по меньшей мере одно из упомянутых направлений выезда с парковки;
При поступлении команды о выезде с места парковки на ее основе выбирается из упомянутых направлений выезда конечное направление;
На основе упомянутой информации о конечном направлении выезда с парковки происходит генерация траектории для выезда автомобиля с места парковки, по которой упомянутый автомобиль автоматически выезжает с места парковки.
Далее, после того как выполнен этап, на котором на основе упомянутой информации о конечном месте парковки происходит генерация траектории для парковки автомобиля, по которой упомянутый автомобиль автоматически паркуется:
В случае если выявляется аномальное состояние упомянутого автомобиля, система подает команду о временном прекращении процесса автоматического паркинга;
В случае подтверждения того, что упомянутое аномальное состояние упомянутого автомобиля устранено, система подает команду о продолжении процесса автоматического паркинга.
Далее, автомобиль считается находящимся в упомянутом аномальном состоянии, если имеет место по меньшей мере одно из нижеследующих обстоятельств:
Упомянутый автомобиль находится в том состоянии, когда водитель не пристегнут ремнем безопасности;
Упомянутый автомобиль находится в том состоянии, когда его двери не закрыты;
На траектории для парковки упомянутого автомобиля появляется преграда.
Упомянутое устройство для реализации способа контроля системой автоматизированного паркинга включает в себя:
Первый модуль сбора данных, используемый для сбора с помощью датчиков графических и радиолокационных данных вокруг упомянутых автомобиля, движущегося со скоростью, значение которой находится в пределах заданного интервала, причем время, в течение которого автомобиль движется со скоростью, значение которой находится в пределах заданного интервала, больше или равно заданному времени.
Модуль нейронной сети, используемый для ввода упомянутых графических и упомянутых радиолокационных данных в заданную модель сверточной нейронной сети и получения на выходе упомянутой модели сверточной нейронной сети информации об, по меньшей мере, одном парковочном месте, причем обучение упомянутой модели сверточной нейронной сети осуществляется на основе обучающих графических и радиолокационных данных, собранных с большого количества парковочных мест различных типов;
Модуль выбора действия «Парковаться», используемый для выбора информации о конечном месте парковки из общего потока информации об, по меньшей мере, одном упомянутом парковочном месте в соответствии с поступившей командой о выборе места для парковки, если текущая передача, на которой движется упомянутый автомобиль, является передней или холостой;
Модуль выбора траектории, используемый для генерации траектории для парковки автомобиля, по которой упомянутый автомобиль автоматически паркуется, на основе упомянутой информации о конечном месте парковки.
Далее, упомянутое устройство включает в себя, помимо прочего:
Модуль измерения, используемый для определения рабочих состояний упомянутых датчиков изображения, радиолокационных датчиков и электронного блока управления при запуске упомянутого автомобиля, причем различаются исправное и аварийное состояния;
Модуль определения функциональной категории, используемый для определения функциональной категории упомянутого автомобиля на основе упомянутых рабочих состояний.
Далее, упомянутый модуль определения функциональной категории включает в себя:
Первый подмодуль подтверждения, используемый для подтверждения того, что функциональная категория упомянутого автомобиля определена как упомянутая категория нормального функционирования, если рабочее состояние упомянутых датчиков изображения, радиолокационных датчиков и электронного блока управления является исправным;
Второй подмодуль подтверждения, используемый для подтверждения того, что функциональная категория упомянутого автомобиля определена как упомянутая аварийная категория первой степени, если рабочее состояние по меньшей мере одного из упомянутых радиолокационных датчиков и/или электронного блока управления является аварийным;
Третий подмодуль подтверждения, используемый для подтверждения того, что функциональная категория упомянутого автомобиля определена как упомянутая аварийная категория второй степени, если рабочее состояние всех упомянутых датчиков изображения является аварийным;
Четвертый подмодуль подтверждения, используемый для подтверждения того, что функциональная категория упомянутого автомобиля определена как упомянутая аварийная категория третьей степени, если рабочее состояние некоторых из упомянутых датчиков изображения является аварийным.
Далее, упомянутое устройство включает в себя:
Первый контрольный модуль, роль которого заключается в подаче команды о прекращении функционирования упомянутого электронного блока управления в случае, если функциональная категория упомянутого автомобиля определена как упомянутая аварийная категория первой степени;
Второй контрольный модуль, роль которого заключается в подаче команды о прекращении функционирования упомянутых датчиков изображения в случае, если функциональная категория упомянутого автомобиля определена как упомянутая аварийная категория второй степени;
Третий контрольный модуль, роль которого заключается в подаче команды о прекращении функционирования тех датчиков изображения, упомянутое рабочее состояние которых определено как упомянутое аварийное состояние, в случае, если функциональная категория упомянутого автомобиля определена как упомянутая аварийная категория третьей степени.
Далее, информация об упомянутом парковочном месте включает в себя один или несколько из любых следующих типов информации: информация о наличии в парковочном месте дорожных конусов, информация о наличии в парковочном месте знаков, запрещающих парковку, информация о наличии в парковочном месте парковочного барьера, информация о наличии в парковочном месте разметок и информация о наличии в парковочном месте преград.
Далее, упомянутый модуль нейронной сети включает в себя:
Подмодуль ввода, используемый для ввода упомянутых графических и упомянутых радиолокационных данных в модель сверточной нейронной сети и получения упомянутой моделью сверточной нейронной сети информации об упомянутом парковочном месте, в том числе о его категории;
Первый подмодуль вывода, используемый для получения на выходе упомянутой модели сверточной нейронной сети информации об упомянутом парковочном месте, в том числе о его категории;
Далее, упомянутый модуль нейронной сети включает в себя:
Подмодуль определения направления парковки в угловом парковочном месте, используемый для определения упомянутой моделью сверточной нейронной сети в отношении упомянутого углового парковочного места направления парковки на основе упомянутых графических и радиолокационных данных, если упомянутое парковочное место является угловым;
Далее, упомянутый модуль выбора действия «Парковаться» включает в себя:
Подмодуль отображения, используемый для отображения интерфейса управления парковкой, содержащий информацию об, по меньшей мере, одном из упомянутых парковочных мест, если в момент поступления сигнала о поиске парковочного места текущая передача, на которой движется упомянутый автомобиль, является упомянутой передней или упомянутой холостой передачей;
Подмодуль выбора, используемый для выбора информации о конечном месте парковки из общего потока информации об, по меньшей мере, одном упомянутом парковочном месте при поступлении команды о выборе места для парковки, соответствующей упомянутому интерфейсу управления парковкой.
Далее, устройство включает в себя, помимо прочего:
Второй модуль сбора данных, используемый для сбора данных об обстановке вокруг упомянутого автомобиля с помощью упомянутых датчиков, если в момент поступления сигнала о поиске парковочного места текущая передача упомянутого автомобиля является парковочной;
Модуль подтверждения, используемый для подтверждения по меньшей мере одного направления выезда упомянутого автомобиля в места парковки на основе данных об обстановке;
Модуль отображения, используемый для отображения интерфейса управления выездом автомобиля с места парковки, содержащего по меньшей мере одно из упомянутых направлений выезда;
Модуль выбора действия «Выехать с места парковки», используемый для выбора из упомянутых направлений выезда с места парковки конечного направления выезда в соответствии с поступившей командой о выезде с места парковки;
Модуль определения траектории выезда с места парковки, используемый для генерации траектории для выезда автомобиля с места парковки, по которой упомянутый автомобиль на основе упомянутой информации о конечном направлении выезда автоматически выезжает с парковочного места.
Далее, упомянутое устройство включают в себя, помимо прочего:
Модуль временного прекращения паркинга, используемый для подачи команды о временном прекращении процесса автоматического паркинга в случае, если выявляется аномальное состояние упомянутого автомобиля;
Модуль возобновления паркинга, используемый для подачи команды о продолжении процесса автоматического паркинга упомянутого автомобиля в случае подтверждения того, что упомянутое аномальное состояние упомянутого автомобиля устранено.
Далее, автомобиль считается находящимся в упомянутом аномальном состоянии, если имеет место по меньшей мере одно из нижеследующих обстоятельств:
Упомянутый автомобиль находится в том состоянии, когда водитель не пристегнут ремнем безопасности;
Упомянутый автомобиль находится в том состоянии, когда его двери не закрыты;
На траектории для парковки упомянутого автомобиля появляется преграда.
По сравнению с существующими на сегодня технологиями способ контроля системой автоматизированного паркинга и устройства для его реализации, представляемые настоящим раскрытием, обладают нижеследующими преимуществами:
Способ контроля системой автоматизированного паркинга и устройства для его реализации, представляемые в примере реализации настоящего раскрытия, включают в себя: графические и радиолокационные данные, собираемые датчиками вокруг автомобиля, движущегося со скоростью, значение которой находится в пределах заданного интервала, причем время, в течение которого автомобиль движется со скоростью, значение которой находится в пределах заданного интервала, больше или равно заданному времени; информацию об, по меньшей мере, одном парковочном месте, получаемую на выходе заданной модели сверточной нейронной сети, в которую введены графические и радиолокационные данные, причем обучение модели сверточной нейронной сети осуществляется на основе обучающих графических и радиолокационных данных, собранных с большого количества парковочных мест различных типов; информацию о конечном месте парковки, выбираемую из общего потока информации об, по меньшей мере, одном парковочном месте в соответствии с поступившей командой о выборе места для парковки, если текущая передача, на которой движется автомобиль, является передней или холостой; траекторию для автоматической парковки автомобиля, генерируемую на основе информации о конечном месте парковки. Настоящим раскрытием предусмотрена возможность заблаговременного поиска вблизи автомобиля парковочного места путем измерения скорости движения автомобиля, идентификации парковочного места для паркинга автомобиля в неоднородных ситуациях путем применения модели сверточной нейронной сети, кроме того, предусмотрена возможность предоставления информации о множестве свободных парковочных мест, что позволяет удовлетворять потребности пользователя в поиске мест для парковки различных типов, оптимизировать саму систему автоматизированного паркинга и повышать комфортабельность пользователя во время вождения.
Вышеизложенное является лишь кратким обзором технических решений, предлагаемых настоящим раскрытием. Для того, чтобы более широко раскрыть сущность технических способов, представленных настоящим раскрытием, и в соответствии с инструкцией претворить его в жизнь, а также дать пояснения и сделать более понятными характерные особенности, преимущества и одну из вышеперечисленных и прочих целей настоящего раскрытия, ниже приводится конкретный пример его реализации.
Пояснения к иллюстрациям
Для того, чтобы внести ясность в технические решения, предлагаемые примером реализации настоящего раскрытия или существующими технологиями, ниже дается краткая информация об иллюстрациях, используемых для описания примера реализации данного раскрытия или существующих технологий, причем, очевидно, что нижеописанные иллюстрации относятся к примеру реализации настоящего раскрытия и могут послужить основой для получения рядовыми техническими работниками данной области других иллюстраций без созидательного труда.
Иллюстрации, составляющие часть настоящего раскрытия, используются для облегчения понимая сути представленного в заявке раскрытия, а иллюстрированный пример реализации и текстовые пояснения к нему служат для интерпретации настоящего раскрытия и не устанавливают ненужных ограничений в его отношении. Далее даются пояснения к прилагаемым иллюстрациям:
на Фиг. 1 представлена технологическая схема способа контроля системой автоматизированного паркинга, упомянутого в примере реализации настоящего раскрытия;
на Фиг. 2 представлена схема базовой компоновки упомянутой в примере реализации настоящего раскрытия системы автоматизированного паркинга в автомобиле, оборудованном такой системой;
на Фиг. 3 представлен интерфейс поиска парковочного места в общем интерфейсе управления парковкой автомобиля, упомянутом в примере реализации настоящего раскрытия;
на Фиг. 4 представлен интерфейс отображения парковочного места в общем интерфейсе управления парковкой автомобиля, упомянутом в примере реализации настоящего раскрытия;
на Фиг. 5 представлена технологическая схема другого способа контроля системой автоматизированного паркинга, упомянутого в примере реализации настоящего раскрытия;
на Фиг. 6 представлено схематическое изображение классификатора парковочных мест с тремя местами, упомянутого в примере реализации настоящего раскрытия;
на Фиг. 7 представлена технологическая схема процесса автоматизированного паркинга, упомянутого в примере реализации настоящего раскрытия;
на Фиг. 8 представлено схематическое изображение упомянутой в примере реализации настоящего раскрытия информации об автомобиле, находящемся в аномальном состоянии;
на Фиг. 9 представлено схематическое изображение упомянутых в примере реализации настоящего раскрытия опций, отображаемых после приостановления процесса паркинга;
на Фиг. 10 представлена схема процесса приостановления автоматического паркинга, упомянутого в примере реализации настоящего раскрытия;
на Фиг. 11 представлена технологическая схема другого способа контроля системой автоматизированного паркинга, упомянутого в примере реализации настоящего раскрытия;
на Фиг. 12 представлена технологическая схема другого способа контроля системой автоматизированного паркинга, упомянутого в примере реализации настоящего раскрытия;
на Фиг. 13 представлена схема выбора направления для выезда с места парковки, функцией которого обладает система автоматизированного паркинга, упомянутая в примере реализации настоящего раскрытия;
на Фиг. 14 представлена схема упомянутого в примере реализации настоящего раскрытия процесса автоматизированного паркинга другого типа;
на Фиг. 15 представлен чертеж конструкции упомянутого в примере реализации настоящего раскрытия автомобиля, оборудованного системой автоматизированного паркинга;
на Фиг. 16 схематически изображена структура вычислительно-обрабатывающего оборудования, используемого для реализации способа, представляемого в настоящем раскрытии; и
на Фиг. 17 схематически изображен модуль памяти, используемый для хранения или переноса программных кодов, необходимых для реализации представляемого настоящим раскрытием способа.
Конкретный пример реализации изобретения
В целях раскрытия сущности вышеперечисленных задач, технических решений и преимуществ настоящего раскрытия далее дается полное и детальное описание технических решений, применимых в примерах реализации изобретения, с использованием иллюстраций в виде чертежей. Однако приведенный ниже пример реализации раскрытия охватывает лишь часть, а не всю сферу его применения. Все прочие способы реализации раскрытия, получаемые рядовыми техническими работниками данной области на основе приведенного в настоящей заявке примера без созидательного труда, являются объектами патентных прав и подлежат охране в рамках настоящей заявки.
Следует отметить, что при отсутствии противоречий пример реализации раскрытия, представленный в настоящей заявке, и его характерные особенности могут быть взаимно комбинированы.
Ниже на примере реализации с иллюстрациями в виде прилагаемых чертежей дается детальное описание настоящего раскрытия.
На Фиг. 1 представлена технологическая схема способа контроля системой автоматизированного паркинга, упомянутого в примере реализации настоящего раскрытия.
Шаг 101: сбор с помощью датчиков графических и радиолокационных данных вокруг упомянутых автомобиля, движущегося со скоростью, значение которой находится в пределах заданного интервала, причем время, в течение которого автомобиль движется со скоростью, значение которой находится в пределах заданного интервала, больше или равно заданному времени.
Современные автомобили оборудованы многочисленными электронными системами, обогащающими функциональность автомобилей и позволяющими повышать их практичность, более того, благодаря взаимодействию электронных систем различных типов между собой возможно повышение уровня автоматизации автомобилей.
Как показано на примере реализации настоящего раскрытия, автомобиль оснащен многочисленными электронными системами и датчиками, являющимися частями базовой компоновки системы автоматизированного паркинга в автомобиле, оборудованном такой системой. Схема такой базовой компоновки представлена на Фиг. 2, на которой проиллюстрированы:
Радиолокационные датчики, предназначенные для сбора вокруг автомобиля радиолокационных данных;
Датчики изображения, предназначенные для сбора вокруг автомобиля графических данных;
Датчики ремней безопасности, предназначенные для сбора информации о том, пристегнуты ли в текущий момент ремни безопасности;
Дисплейный блок, используемый для отображения информации об автомобиле и получения пользовательских команд и состоящий в том числе из автомобильного монитора, центрального дисплея и проч.;
Система электронного контроля устойчивости кузова (Electronic Stability Program, ESP), предназначенная для контроля устойчивости кузова автомобиля, приведения в действие тормозного механизма или воздействия на выходной крутящий момент и взаимодействующая с модулем управления двигателем (Engine Control Module, ECM) или блоком управления транспортным средством (Vehicle Control Unit, VCU);
Система электрического усилителя руля (Electric Power Steering, EPS), предназначенная для приведения в действие руля и сообщения данных об угле его поворота;
Блок управления коробкой передач (Transmission Control Unit, TCU), предназначенный для сообщения данных о текущей передаче и переключения передач на конечные;
Модуль контроля кузова (Body Control Module, BCM), предназначенный для сообщения данных о состоянии дверей автомобиля и контроля автомобильных дверных замков;
Модуль передач Балис (Balise Transmission Module, BTM), предназначенный для приема и отправки данных в оконечные устройства;
К оконечным устройствам относятся электронные ключи, мобильные терминалы, или другое электронное оборудование, подключенное к той же сети, к которой подключен автомобиль;
Электронный блок управления (Electronic Control Unit, ECU), предназначенный для приемки и обработки данных, собранных датчиками, а также для обработки и сообщения данных о вводах и выводах различных электронных систем.
На данном шаге предусмотрена возможность контроля ESP скорости автомобиля. Если автомобиль едет со скоростью, значение которой находится в пределах заданного интервала, причем время, в течение которого он движется со скоростью, значение которой находится в пределах заданного интервала, больше или равно заданному времени, то датчики изображения, которыми он оборудован, собирают вокруг него графические данные, а радиолокационные датчики - радиолокационные данные.
Говоря конкретно, в большинстве случаев, когда автомобиль собирается остановиться, скорость его движения поддерживается в пределах сравнительно малых значений, например, от 0 до 25 км/ч. Одновременно с этим, во избежание стартования автомобиля дополнительно задано условие о времени, в течение которого автомобиль движется со скоростью, значение которой находится в пределах заданного интервала. Например, если скорость движения автомобиля поддерживается в пределах 0 до 25 км/ч, а время, в течение которого поддерживается такая скорость, составляет 10 с, то электронный блок управления может на основе отправленных ESP данных о скорости автомобиля включить датчики изображения и радиолокационные датчики для начала сбора вокруг автомобиля графических и радиолокационных данных.
Например, если, когда пользователь заезжает на стоянку, чтобы найти место для парковки автомобиля, и начинает снижать скорость его движения до 0-25 км/ч, время, в течение которого поддерживается такая скорость, превышает 10 с, то датчики изображения и радиолокационные датчики начинают собирать вокруг автомобиля графические и радиолокационные данные и отправляют собранные данные в электронный блок управления.
Согласно данному примеру реализации настоящего раскрытия, если результат измерения скорости автомобиля показывает, что она отвечает заданным условиям, то автомобиль начинает самостоятельно собирать вокруг себя графические и радиолокационные данные. Электронный блок управления заблаговременно получает графические и радиолокационные данные, собранные датчиками изображения и радиолокационными датчиками, соответственно, раньше, чем пользователь запускает систему автоматизированного паркинга, и по этим данным проводит в дальнейшем анализ парковочных мест.
Шаг 102: ввод в заданную модель сверточной нейронной сети упомянутых графических и радиолокационных данных и получение на выходе упомянутой модели информации об, по меньшей мере, одном парковочном месте, причем обучение упомянутой модели сверточной нейронной сети осуществляется на основе обучающих графических и радиолокационных данных, собранных с большого количества парковочных мест различных типов.
Согласно данному примеру реализации настоящего раскрытия, сверточная нейронная сеть представляет собой нейронную сеть с прямой связью, содержащую в себе вычисления сверток и имеющую глубокую архитектуру, а также один из представительных алгоритмов глубокого обучения. Сверточные нейронные сети обладают повышенной отказоустойчивостью и превосходными способностями проводить параллельную обработку данных и самообучаться, они способны устранять проблемы, возникающие в результате неоднородности информации об окружающей обстановке, нечеткости фоновых знаний и неясности норм вывода заключений, при этом допустимо, если образцы имеют значительные дефекты или искажены, кроме того, сверточные нейронные сети отличаются повышенной оперативностью, хорошей способностью самоадаптации и высоким разрешением, поэтому с ними можно достигнуть высокой точности и скорости при идентификации парковочных мест в условиях, когда на стоянке размещены парковочные места различных типов.
Для построения модели сверточной нейронной модели можно предварительно настроить в ней различные параметры, такие как параметры скрытых и выходных слоев сети. Процесс построения сверточной нейронной сети состоит из следующих этапов: во-первых, графические и радиолокационные обучающие данные, собранные с большого количества парковочных мест различных типов, вводятся в предварительно настроенные скрытые слои сверточной нейронной сети, где из них извлекаются признаки графического и радиолокационного распознавания; во-вторых, извлеченные признаки графического и радиолокационного распознавания классифицируются посредством выходных слоев сверточной нейронной сети; в-третьих, если получаемая в результате классификации информация о парковочном месте совпадает с информацией о парковочном месте, соответствующей всем графическим и радиолокационным обучающим данным, то процесс обучения сверточной нейронной сети считается завершенным и давшим в результате обученную модель сверточной нейронной сети.
Далее, если получаемая в результате классификации информация о парковочном месте не совпадает с информацией о парковочном месте, соответствующей всем графическим и радиолокационным обучающим данным, то можно путем регулировки предварительных настроек изменить параметры скрытых и выходных слоев сети так, чтобы в конечном итоге получаемая в результате классификации информация о парковочном месте совпала с информацией о парковочном месте, соответствующей всем графическим и радиолокационным обучающим данным, а процесс обучения сверточной нейронной сети можно было считать завершенным и давшим в результате обученную модель сверточной нейронной сети.
На данном шаге предусмотрена возможность ввода графических и радиолокационных данных в настроенную модель сверточной нейронной сети в электронном блоке управления, если такая модель обучена и в электронный блок управления поступают графические и радиолокационные данные, для того чтобы модель сверточной нейронной сети вывела информацию о парковочном месте.
Далее, различается действительная и недействительная информация о парковочном месте. Под действительной понимается информация о парковочном месте, в котором можно припарковать автомобиль, при этом выводимая моделью сверточной нейронной сети действительная информация о парковочном месте может быть сохранена электронным блоком управления в локальное хранилище как информация о рассматриваемом парковочном месте. Под недействительной понимается информация о парковочном месте, в котором невозможно припарковать автомобиль, при этом выводимая моделью сверточной нейронной сети недействительная информация о парковочном месте может быть удалена электронным блоком управления.
Например, если пользователь намерен припарковать автомобиль на стоянке, то, пока автомобиль еще движется, датчики уже начинают собирать графические и радиолокационные данные о большом количестве парковочных мест и передают их в электронный блок управления. Часть из таких парковочных мест оборудована парковочными барьерами, часть занята другими запаркованными автомобилями, но есть и свободные места, в которых пользователь может припарковать свой автомобиль. Электронный блок управления может вводить графические и радиолокационные данные в заданную модель сверточной нейронной сети, которая впоследствии выводит информацию о парковочном месте, в том числе, если в парковочном месте имеется парковочный барьер или припаркован другой автомобиль, то информация о таком парковочном месте является недействительной, а если парковочное место пустое, то информация о нем является действительной. Действительная информация о парковочных местах сохраняется электронным блоком управления, а недействительная удаляется им.
Оптимальное решение, предлагаемое настоящим раскрытием, заключается в том, что электронный блок управления может не только хранить информацию о большом количестве парковочных мест, но и оценивать дистанцию на основе сохраненной информации. В случае если электронным блоком управления обнаруживается, что фактическое расстояние между автомобилем и хранимой информацией о парковочном месте превышает заданное значение, он такую информацию удаляет из своей памяти, чтобы не перегружать ее, а также не предоставлять пользователю информации о парковочных местах, находящихся далеко от местонахождения автомобиля, и не доставлять ему в этой связи неудобств.
Согласно данному примеру реализации настоящего раскрытия, электронный блок управления может с помощью заданной модели сверточной нейронной сети выводить информацию о парковочном месте путем ввода в нее графических и радиолокационных данных, кроме того, благодаря модели сверточной нейронной сети электронный блок управления может обрабатывать графические и радиолокационные данные в самых разных и неоднородных условиях, для того чтобы точно распознать действительно свободные места для парковки и повысить комфортабельность пользователя во время вождения.
Шаг 103: выбор из общего потока информации об, по меньшей мере, одном парковочном месте информации о конечном месте парковки в соответствии с поступившей командой о выборе места для парковки, если текущая передача, на которой движется автомобиль, является передней или холостой.
На данном шаге предусмотрена возможность определения и передачи TCU информации о текущей передаче, на которой едет автомобиль, в электронный блок управления. Если текущая передача автомобиля является передней или холостой, то электронный блок управления в соответствии с поступившей командой о выборе места для парковки выбирает из общего потока информации об, по меньшей мере, одном парковочном месте информацию о конечном месте парковки.
Говоря конкретно, пользователь, намеревающийся автоматически припарковать автомобиль, может открыть интерфейс управления автоматической парковкой автомобиля. Получив такой сигнал, электронный блок управления посредством TCU получает информацию о передаче, на которой автомобиль движется в текущий момент, и, если текущая передача автомобиля является передней или холостой, то интерфейс управления автоматической парковкой заменяется на интерфейс управления парковкой. Если до того, как дисплейный блок отображает интерфейс управления парковкой, в электронном блоке управления уже хранится информация о парковочном месте, то данная информация отображается в интерфейсе управления парковкой. Если же в электронном блоке управления нет информации о парковочном месте, до того как дисплейный блок отображает интерфейс управления парковкой, то интерфейс управления парковкой делает напоминание о том, чтобы пользователь продолжал водить автомобиль и беспрерывно с помощью датчиков собирать вокруг автомобиля графические и радиолокационные данные до тех пор, пока в электронный блок управления не будет сохранена информация о парковочном месте, а в интерфейсе управления парковкой не будет отображена упомянутая информация. На Фиг. 3 представлен интерфейс поиска парковочного места в общем интерфейсе управления парковкой автомобиля, упомянутом в примере реализации настоящего раскрытия.
Далее, интерфейс управления заездом автомобиля на парковочное место может одновременно отображать информацию о множестве парковочных мест, одно из которых пользователь может выбирать в соответствии со своими фактическими потребностями. После того как место для парковки выбрано пользователем, т.е. после того как пользователь подает команду о парковке автомобиля, электронный блок управления выбирает по такой команде информацию о конечном парковочном месте.
Например, на Фиг. 4 представлен интерфейс отображения парковочного места в общем интерфейсе управления парковкой автомобиля, упомянутом в примере реализации настоящего раскрытия. Как видно на Фиг. 4, при обнаружении автомобилем поблизости 3 свободных парковочных места на автомобильном мониторе отображаются эти 3 свободных места, из которых пользователь может выбирать. Данные парковочные места обозначены буквами А, В и С, соответственно.
Согласно данному примеру реализации настоящего раскрытия, электронный блок управления может хранить и отображать для пользователя информацию о множестве парковочных мест, когда текущая передача, на которой движется автомобиль, является передней или холостой, затем по команде от пользователя о парковке автомобиле проводит отбор информации о конечном месте для парковки из общего потока информации об, по меньшей мере, одном парковочном месте, а когда пользователю требуется в соответствии с фактическими потребностями самостоятельно выбрать место парковки, предлагает пользователю на выбор информацию о множестве парковочных мест и тем самым позволяет повысить комфортабельность пользователя во время вождения.
Шаг 104: генерация траектории для парковки автомобиля, по которой упомянутый автомобиль автоматически паркуется, на основе упомянутой информации о конечном месте парковки.
На данном шаге предусмотрена возможность генерации электронным блоком управления траектории для парковки автомобиля на основе информации о конечном парковочном месте, при этом электронный блок управления, взаимодействуя с ESP, EPS и TCU в управлении направлением движения, а также процессами переключения передач, торможения и остановки, автоматически заводит автомобиль на конечное место парковки по сгенерированной траектории.
Говоря конкретно, информация о конкретном парковочном месте может содержать в себе информацию о местоположении данного места, а электронный блок управления может сравнивать фактическое местонахождение автомобиля с местоположением места парковки, рассчитывать относительную дистанцию между автомобилем и парковочным местом и составлять на основе результата расчетов необходимую систему координат. Такая система координат позволит электронному блоку управления определить место по координатам, радиус поворота и угол, заключенный между автомобилем и парковочным местом, чтобы рассчитать траекторию заезда на место парковки. Когда автомобиль начинает автоматически парковаться, ESP может по командам, подаваемым электронным блоком управления, постоянно контролировать скорость и процессы торможения автомобиля, EPS может по командам, подаваемым электронным блоком управления, постоянно контролировать направление движения автомобиля, а TCU может по командам, подаваемым электронным блоком управления, постоянно контролировать процессы переключения передач, пока автомобиль не будет полностью заведен на конечное парковочное место и не будет завершен процесс автоматической парковки.
Исходя из вышеизложенного, способ контроля системой автоматизированного паркинга, представляемый настоящим раскрытием, включает в себя: графические и радиолокационные данные, собираемые датчиками вокруг автомобиля, движущегося со скоростью, значение которой находится в пределах заданного интервала, причем время, в течение которого автомобиль движется со скоростью, значение которой находится в пределах заданного интервала, больше или равно заданному времени; информацию об, по меньшей мере, одном парковочном месте, получаемую на выходе заданной модели сверточной нейронной сети, в которую введены графические и радиолокационные данные, причем обучение модели сверточной нейронной сети осуществляется на основе обучающих графических и радиолокационных данных, собранных с большого количества парковочных мест различных типов; информацию о конечном месте парковки, выбираемую из общего потока информации об, по меньшей мере, одном парковочном месте в соответствии с поступившей командой о выборе места для парковки, если текущая передача, на которой движется автомобиль, является передней или холостой; траекторию для автоматической парковки автомобиля, генерируемую на основе информации о конечном месте парковки. Настоящим раскрытием предусмотрена возможность заблаговременного поиска вблизи автомобиля парковочного места путем измерения скорости движения автомобиля, идентификации парковочного места для паркинга автомобиля в неоднородных ситуациях путем применения модели сверточной нейронной сети, кроме того, предусмотрена возможность предоставления информации о множестве свободных парковочных мест, что позволяет удовлетворять потребности пользователя в поиске мест для парковки различных типов, оптимизировать саму систему автоматизированного паркинга и повышать комфортабельность пользователя во время вождения.
На Фиг. 5 представлена технологическая схема другого способа контроля системой автоматизированного паркинга, упомянутого в примере реализации настоящего раскрытия.
Шаг 201: сбор с помощью датчиков графических и радиолокационных данных вокруг упомянутого автомобиля, движущегося со скоростью, значение которой находится в пределах заданного интервала, причем время, в течение которого автомобиль движется со скоростью, значение которой находится в пределах заданного интервала, больше или равно заданному времени.
Данный шаг аналогичен изложенному выше шагу 101 и поэтому не будет подробно описан далее.
Шаг 202: ввод в модель сверточной нейронной сети упомянутых графических и упомянутых радиолокационных данных для получения упомянутой моделью на основе этих данных информации о парковочном месте, в том числе о его категории.
Согласно данному примеру реализации настоящего раскрытия, в электронном блоке управления установлена модель сверточной нейронной сети, обучение которой осуществляется многократно и посредством обучающих графических и радиолокационных данных, собранных с большого количества парковочных мест различных типов и введенных в данную модель, причем информация о парковочных местах различных типов включает в себя один или несколько из любых следующих типов информации: информация о наличии в парковочном месте дорожных конусов, информация о наличии в парковочном месте знаков, запрещающих парковку, информация о наличии в парковочном месте парковочного барьера, информация о наличии в парковочном месте разметок и информация о наличии в парковочном месте преград. Далее, данным примером реализации настоящего раскрытия не ставятся какие-либо ограничения в отношении выбора парковочных мест, спектр которого может быть изменен или расширен.
На данном шаге предусмотрена возможность ввода в заданную модель сверточной нейронной сети графических и радиолокационных данных, полученных электронным блоком управления.
Далее, модель сверточной нейронной сети, получив графические и радиолокационные данные, с помощью своих скрытых слоев извлекает из них признаки графического и радиолокационного распознавания, затем с помощью выходных слоев классифицирует извлеченные признаки и, соответственно, информацию о парковочных местах.
Помимо прочего, информация о парковочном месте может содержать в себе также информацию о его местоположении и категории. Как правило, парковочные места бывают следующих категорий: параллельная, перпендикулярная и угловая парковка. На Фиг. 6 представлено схематическое изображение классификатора парковочных мест с тремя местами, упомянутого в примере реализации настоящего раскрытия, в том числе, как видно на Фиг. 6, буквой «a» обозначена зона для перпендикулярной парковки, буквой «b» - зона для параллельной парковки, а буквами «c» и «d» - зоны для угловой парковки. Местом для параллельной парковки называется такое место парковки, большая грань которого располагается параллельно по отношению к проезжей части дороги. Местом для перпендикулярной парковки называется такое место парковки, большая грань которого располагается перпендикулярно по отношению к проезжей части дороги. Местом для угловой парковки называется такое место парковки, положение большей грани которого не является ни параллельным, ни перпендикулярным по отношению к проезжей части дороги.
Шаг 203: получение на выходе упомянутой модели сверточной нейронной сети упомянутой информации о парковочном месте, в том числе информации о его категории.
На данном шаге предусмотрена возможность вывода и отправления моделью сверточной нейронной сети в электронный блок управления информации о парковочном месте, включающую информацию о его категории, после ее классификации.
Шаг 204: определение упомянутой моделью сверточной нейронной сети в отношении упомянутого углового парковочного места направления парковки на основе упомянутых графических и радиолокационных данных, если упомянутое парковочное место является угловым.
После того, как парковочное место определено моделью сверточной нейронной сети как место для угловой парковки, как это описано в шаге 202, можно непосредственно переходить к шагу 204.
На данном шаге предусмотрена возможность проведения моделью сверточной нейронной сети последующего анализа графических и радиолокационных данных, связанных с данным парковочным местом, после того как оно определено моделью как место для угловой парковки, и определения направления, по которому автомобиль должен заехать на данное угловое парковочное место.
Говоря конкретно, как правило, угловая парковка, при которой передняя часть автомобиля уходит вглубь, называется угловой парковкой передним ходом, а угловая парковка, при которой передняя часть автомобиля оказывается на стороне заезда на парковочное место, называется угловой парковкой задним ходом.
Далее, различаются угловые упаковочные места, на которые заезжают в прямом направлении, и угловые упаковочные места, на которые заезжают в обратном направлении. Как видно на Фиг. 6, в зоне «c» размещены места, на которые заезжают в прямом направлении, а в зоне «d» - места, на которые заезжают в обратном направлении. Место, в котором паркуют автомобиль в прямом направлении, отличается тем, что угол, заключенный между большей гранью такого парковочного места и направлением движения в проезжей части дороги, менее 90 градусов, а место, в котором паркуют автомобиль в обратном направлении, отличается тем, что угол, заключенный между большей гранью такого парковочного места и направлением движения в проезжей части дороги, превышает 90 градусов.
Для заезда передним ходом на угловое парковочное место, на которое заезжают в прямом направлении, требуется выполнить лишь один поворот автомобиля на небольшой угол, в то время как для парковки автомобиля в месте, на которое заезжают в прямом направлении, но при этом выбран способ заезда задним ходом, требуется выполнить многократные повороты на большие углы. Из этого следует, что точное определение направления заезда на угловое парковочное место позволяет сокращать количество маневров при последующем планировании маршрута движения во время автоматического паркинга и, как следствие, снижать вероятность появления ошибок.
Далее, если из выводимой моделью сверточной нейронной сети информации о категории парковочного места следует, что данное парковочное место является угловым, то модель сверточной нейронной сети может подвергнуть последующему анализу графические и радиолокационные данные, соответствующие данному парковочному месту. После того, как направление заезда на угловое парковочное место определено, модель сверточной нейронной сети оценивает данное парковочное место по трем критериям.
Говоря конкретно, критерием оценки первой степени является приоритетное определение моделью сверточной нейронной сети того, имеется ли в данном угловом парковочном месте знак, указывающий на направление заезда, и, если такой знак имеется, то заезд автомобиля на место парковки осуществляется в направлении, указанном данным знаком. Критерием оценки второй степени является, в случае если в данном угловом парковочном месте нет знака, указывающего на направление заезда, определение моделью сверточной нейронной сети того, припаркованы ли по две стороны данного парковочного места другие автомобили, и, если по обе стороны стоят другие автомобили, причем направление их заезда одинаковое, то заезд данного автомобиля на место парковки осуществляется в том же направлении, в каком запаркованы те другие автомобили. Критерием оценки третьей степени является, в случае если ни с одной из сторон данного парковочного места нет других автомобилей или есть другие автомобили, но они запаркованы в разных направлениях, определение моделью сверточной нейронной сети того, является ли данное угловое парковочное место местом, на которое заезжают в прямом направлении, и если да, то в качестве способа парковки выбирается способ заезда передним ходом, в противном случае выбирается способ заезда задним ходом.
Например, автомобиль подъезжает к стоянке, чтобы припарковаться, и место для парковки определено моделью сверточной нейронной сети на основе графических и радиолокационных данных как угловое парковочное место. В таком случае модель сверточной нейронной сети классифицирует данное парковочное место по направлению парковки. Если в данном угловом парковочном месте нет знака, указывающего на направление заезда, но по обе стороны стоят другие автомобили, причем эти автомобили запаркованы в одном и том же направлении, то оценка проводится по критерию второй степени. Далее, если заезд обоих автомобилей, запаркованных по обе стороны рассматриваемого парковочного места, совершен передним ходом, то способ заезда на данное угловое парковочное место определяется моделью сверточной нейронной сети как способ заезда передним ходом.
Согласно данному примеру реализации настоящего раскрытия можно, в случае если парковочное место является угловым, определить с помощью модели сверточной нейронной сети способ заезда на данное парковочное место, что позволило бы повысить практичность системы автоматизированного паркинга при данном способе маневрирования автомобилем, сократить количество маневров при последующем планировании маршрута движения во время автоматического паркинга, снизить вероятность появления ошибок и повысить комфортабельность пользователя во время вождения.
Кроме того, информация о парковочном месте, выводимая упомянутой моделью сверточной нейронной сети, содержит в себе в том числе информацию о способе заезда на упомянутое парковочное место, если оно является угловым.
На данном шаге предусмотрена возможность вывода и отправления моделью сверточной нейронной сети в электронный блок управления информации о парковочном месте, включающей в себя информацию о направлении заезда на данное место, после того, как данная информация прошла классификацию.
Шаг 205: отображение интерфейса управления парковкой, содержащего информацию об, по меньшей мере, одном из упомянутых парковочных мест, если в момент поступления сигнала о поиске парковочного места текущая передача, на которой движется упомянутый автомобиль, является упомянутой передней или упомянутой холостой передачей.
На данном шаге пользователь, намеревающийся автоматически припарковать автомобиль, может открыть интерфейс управления автоматической парковкой автомобиля, подав тем самым сигнал о необходимости совершить парковку. Получив такой сигнал, электронный блок управления посредством TCU получает информацию о передаче, на которой автомобиль движется в текущий момент, и, если текущая передача автомобиля является передней или холостой, то интерфейс управления автоматической парковкой заменяется на интерфейс управления парковкой. Если до того, как дисплейный блок отображает интерфейс управления парковкой, в электронном блоке управления уже хранится информация о парковочном месте, то данная информация отображается в интерфейсе управления парковкой. Если же в электронном блоке управления нет информации о парковочном месте, до того как дисплейный блок отображает интерфейс управления парковкой, то интерфейс управления парковкой делает напоминание о том, чтобы пользователь продолжал водить автомобиль и беспрерывно с помощью датчиков собирать вокруг автомобиля графические и радиолокационные данные до тех пор, пока в электронный блок управления не будет сохранена информация о парковочном месте, а в интерфейсе управления парковкой не будет отображена упомянутая информация.
Говоря конкретно, интерфейс управления парковкой может отображать информацию о множестве парковочных мест, одно из которых пользователь может выбирать в соответствии со своими фактическими потребностями.
Шаг 206: выбор информации о конечном месте парковки из общего потока информации об, по меньшей мере, одном парковочном месте при поступлении команды о выборе места для парковки, соответствующей интерфейсу управления парковкой.
На данном шаге предусмотрена возможность выбора пользователем в соответствии со своими фактическими потребностями информации об одном парковочном месте и возможность выбора электронным блоком управления информации о конечном парковочном месте из общего потока информации об, по меньшей мере, одном парковочном месте при поступлении команды о выборе места для парковки, соответствующей интерфейсу управления парковкой.
Говоря конкретно, на Фиг. 7 представлена технологическая схема процесса автоматизированного паркинга, упомянутого в примере реализации настоящего раскрытия. Как видно на Фиг. 7, после запуска автомобиля система автоматизированного паркинга переходит в режим ожидания поиска парковочных мест 01 и, когда скорость движения автомобиля отвечает заданным критериям для начала поиска места для парковки, автомобиль начинает собирать графические и радиолокационные данные и далее переходит к этапу обнаружения парковочных мест 02, но, если скорость движения автомобиля не отвечает заданным критериям для начала поиска места для парковки, то система автоматизированного паркинга снова переходит в режим ожидания поиска парковочных мест 01. При поступлении сигнала о поиске места для парковки, если при этом текущая передача автомобиля является передней или холостой, на мониторе автомобиля отображается информация о парковочных местах 03, а когда пользователь подает команду о выборе действия «Парковаться» и автомобиль вновь движется, система автоматизированного паркинга повторно выполняет этап обнаружения парковочных мест.Когда пользователь подает команду о выборе действия «Парковаться», автомобиль переходит к этапу подготовки к парковке 04, при этом электронный блок управления взаимодействует со всеми другими системами и, если взаимодействие проходит безотказно, начинается процесс парковки 05, а если такое взаимодействие не удалось, процесс парковки 06 завершается.
Оптимальное решение, предлагаемое настоящим раскрытием, заключается в том, что во избежание парковки автомобиля в неверном месте вследствие ошибочных действий пользователя при выборе им информации о конечном месте для парковки требуется одновременно нажимать на ножной тормоз. Только так в автомобиль поступит команда пользователя о выборе действия «Парковаться» и может быть обеспечена точность выбора им информации о конечном парковочном месте.
Шаг 207: генерация траектории для парковки автомобиля, по которой упомянутый автомобиль автоматически паркуется, на основе упомянутой информации о конечном месте парковки.
Данный шаг аналогичен изложенному выше шагу 104 и поэтому не будет подробно описан далее.
Шаг 208: подача команды о временном прекращении процесса автоматического паркинга в случае, если выявляется аномальное состояние упомянутого автомобиля.
На данном шаге предусмотрена возможность определения и отправки датчиками информации о рабочем состоянии автомобиля в электронный блок управления, который на основе полученной информации определяет, является ли данное состояние автомобиля аномальным, и в случае, если является, подает автомобилю команду о временном прекращении процесса автоматического паркинга. Аномальным считается состояние автомобиля, когда водитель не пристегнут ремнем безопасности, двери автомобиля не закрыты и/или на траектории для парковки упомянутого автомобиля появилась преграда.
Говоря конкретно, датчик ремня безопасности, которым оборудован автомобиль, может определить, пристегнут ли водитель ремнем безопасности. Если во время автоматической парковки автомобиля датчиком ремня безопасности обнаруживается, что ремень безопасности водителя расстегнут, то он отправляет эту информацию в электронный блок управления, который, получив от датчика ремня безопасности такую информацию, подает команду о временном прекращении процесса автоматической парковки автомобиля.
Говоря конкретно, модуль контроля кузова, которым оборудован автомобиль, может определять, закрыты ли двери автомобиля. Если во время автоматической парковки автомобиля модулем контроля кузова обнаруживается, что двери автомобиля не закрыты, то он отправляет эту информацию в электронный блок управления, который, получив от модуля контроля кузова такую информацию, подает команду о временном прекращении процесса автоматической парковки автомобиля.
Говоря конкретно, радиолокационные датчики, которыми оборудован автомобиль, могут определять, не появились ли на траектории для парковки упомянутого автомобиля преграды. Если во время автоматической парковки автомобиля радиолокационными датчиками обнаруживается, что на траектории для парковки упомянутого автомобиля имеются преграды, то они отправляют эту информацию в электронный блок управления, который, получив от радиолокационных датчиков такую информацию, подает команду о временном прекращении процесса автоматической парковки автомобиля.
Далее, к упомянутым аномальным состояниям могут отнестись и другие типы аномальных состояний, в которых может оказаться автомобиль, например, если место водителя дополнительно оборудовано датчиком присутствия человека в водительском сиденье, то такой датчик может в соответствии с результатом измерения давления на сиденье отправить в электронный блок управления информацию об отсутствии человека в водительском сиденье, когда пользователь покидает это сиденье. Данный пример реализации настоящего раскрытия не ставит каких-либо ограничений в данном отношении.
Оптимальное решение, предлагаемое настоящим раскрытием, заключается в том, что, если продолжительность пребывания автомобиля в аномальном состоянии превышает заданное время прерывания процесса парковки, то электронный блок управления может самостоятельно выйти из системы автоматизированного паркинга, для того чтобы дать пользователю достаточно времени на устранение неисправностей и снова запустить автомобиль после того, как его аномальное состояние будет устранено.
Например, если во время автоматической парковки автомобиля на стоянке один из пассажиров, сидящий в салоне автомобиля, открыл дверь сам, то модуль контроля кузова, обнаружив то состояние автомобиля, когда его двери не закрыты, отправляет эту информацию в электронный блок управления, который подтверждает, что автомобиль находится в аномальном состоянии, затем подает команду о временном прекращении процесса автоматической парковки и отображает для пользователя информацию о том, что в данный момент автомобиль находится в аномальном состоянии. На Фиг. 8 представлено схематическое изображение упомянутой в примере реализации настоящего раскрытия информации об автомобиле, находящемся в аномальном состоянии, в том числе надпись «Предупреждение! Двери не закрыты!», появившуюся в интерфейсе управления парковкой.
Согласно данному примеру реализации настоящего раскрытия, электронный блок управления может с помощью датчиков определить, находится ли автомобиль в аномальном состоянии. Если текущее состояние автомобиля является аномальным, то электронный блок управления может подать команду о временном прекращении процесса автоматической парковки автомобиля. Возможность путем определения рабочего состояния автомобиля в режиме реального времени, когда идет процесс его автоматической парковки, обнаруживать аномальные состояния автомобиля и своевременной приостановки автоматической парковки позволяет обеспечивать функциональную безопасность системы автоматизированного паркинга и повышать комфортабельность пользователя во время вождения автомобиля.
Шаг 209: подача команды о продолжении процесса автоматического паркинга упомянутого автомобиля в случае подтверждения того, что упомянутое аномальное состояние упомянутого автомобиля устранено.
На данном шаге предусмотрена возможность определения датчиками выхода автомобиля из аномального состояния после того, как такое состояние автомобиля устранено пользователем, при этом датчики отправляют информацию об этом в электронный блок управления, который на основе полученной информации окончательно определяет, устранено ли аномальное состояние автомобиля, и в случае, если такое состояние действительно устранено, подает команду о продолжении процесса автоматического паркинга автомобиля.
Говоря конкретно, после устранения аномального состояния автомобиля отображается интерфейс, в котором пользователю задается вопрос о том, продолжать ли автоматически парковать автомобиль. На Фиг. 9 представлено схематическое изображение упомянутых в примере реализации настоящего раскрытия опций, отображаемых после приостановления процесса паркинга. Как видно на Фиг. 9, после того как аномальное состояние устранено, автомобиль делает на мониторе напоминание в виде надписи «Продолжить парковаться?» и предлагает два варианта ответа - «Да» и «Нет», один из которых пользователь может выбрать в соответствии со своими фактическими потребностями.
На Фиг. 10 представлена схема процесса приостановления автоматического паркинга, упомянутого в примере реализации настоящего раскрытия. Как видно на Фиг. 10, если во время автоматической парковки автомобиль пребывает в аномальном состоянии, то электронный блок управления подает команду о временном прекращении процесса парковки. В случае если время, в течение которого автомобиль пребывает в аномальном состоянии, превышает заданное время прерывания процесса парковки, электронный блок управления может завершить процесс автоматической парковки. После того как аномальное состояние автомобиля устранено, пользователь может выбрать либо продолжение автоматической парковки нажатием кнопки «Продолжить парковаться», либо прекращение автоматической парковки нажатием кнопки «Завершить парковку».
Исходя из вышеизложенного, способ контроля системой автоматизированного паркинга, представляемый настоящим раскрытием, включает в себя: графические и радиолокационные данные, собираемые датчиками вокруг автомобиля, движущегося со скоростью, значение которой находится в пределах заданного интервала, причем время, в течение которого автомобиль движется со скоростью, значение которой находится в пределах заданного интервала, больше или равно заданному времени; информацию об, по меньшей мере, одном парковочном месте, получаемую на выходе заданной модели сверточной нейронной сети, в которую введены графические и радиолокационные данные, причем обучение модели сверточной нейронной сети осуществляется на основе обучающих графических и радиолокационных данных, собранных с большого количества парковочных мест различных типов; информацию о конечном месте парковки, выбираемую из общего потока информации об, по меньшей мере, одном парковочном месте в соответствии с поступившей командой о выборе места для парковки, если текущая передача, на которой движется автомобиль, является передней или холостой; траекторию для автоматической парковки автомобиля, генерируемую на основе информации о конечном месте парковки. Настоящим раскрытием предусмотрена возможность заблаговременного поиска вблизи автомобиля парковочного места путем измерения скорости движения автомобиля, идентификации парковочного места для паркинга автомобиля в неоднородных ситуациях путем применения модели сверточной нейронной сети, кроме того, предусмотрена возможность предоставления информации о множестве свободных парковочных мест, что позволяет удовлетворять потребности пользователя в поиске мест для парковки различных типов, оптимизировать саму систему автоматизированного паркинга и повышать комфортабельность пользователя во время вождения.
Кроме того, настоящим раскрытием предусмотрена возможность определения способа заезда на парковочное место, если данное парковочное место является угловым, что позволило бы повысить практичность системы автоматизированного паркинга при данном способе маневрирования автомобилем, сократить количество маневров при последующем планировании маршрута движения во время автоматического паркинга, снизить вероятность появления ошибок и повысить комфортабельность пользователя во время вождения.
На Фиг. 11 представлена технологическая схема другого способа контроля системой автоматизированного паркинга, упомянутого в примере реализации настоящего раскрытия.
Шаг 301: определение рабочих состояний датчиков изображения, радиолокационных датчиков и электронного блока управления при запуске автомобиля, причем различаются исправное и аварийное состояния;
На данном шаге предусмотрен запуск системы автоматизированного паркинга, происходящий одновременно с запуском автомобиля. После запуска системы автоматизированного паркинга электронный блок управления начинает проверять рабочее состояние датчиков изображения, радиолокационных датчиков и себя самого, причем различаются исправное и аварийное состояния.
Говоря конкретно, на практике электронные системы в автомобилях представляют собой громоздкие и сложные системы, особенно датчики, устанавливаемые снаружи кузовов. Такие датчики легко ломаются и этим негативно влияют на весь функционал автомобиля. В этой связи данным примером реализации настоящего раскрытия предусмотрена возможность проверки электронным блоком управления рабочего состояния датчиков изображения, радиолокационных датчиков и себя самого после запуска системы автоматизированного паркинга.
Оптимальное решение, предлагаемое настоящим раскрытием, заключается в том, что электронный блок управления может также проверять рабочее состояние других датчиков и электронных систем, в отношении чего данным примером реализации настоящего раскрытия не ставятся какие-либо ограничения.
Шаг 302: определение функциональной категории упомянутого автомобиля на основе упомянутых рабочих состояний.
На данном шаге предусмотрена возможность определения электронным блоком управления функциональной категории системы автоматизированного паркинга автомобиля в соответствии с рабочими состояниями различных датчиков.
Говоря конкретнее, данный шаг может быть разбит на три следующих подшага:
Шаг 3021: если рабочее состояние всех упомянутых датчиков изображения, радиолокационных датчиков и электронного блока управления является исправным, то упомянутая функциональная категория автомобиля определяется как упомянутая категория нормального функционирования;
На данном шаге функциональная категория автомобиля определяется как категория нормального функционирования, если рабочее состояние всех датчиков изображения, радиолокационных датчиков и электронного блока управления является исправным. Кроме того, при нормальном функционировании система автоматизированного паркинга обеспечивает нормальное рабочее состояние всех датчиков изображения, радиолокационных датчиков и электронного блока управления.
Шаг 3022: если рабочее состояние по меньшей мере одного из упомянутых радиолокационных датчиков и/или электронного блока управления является аварийным, то упомянутая функциональная категория автомобиля определяется как упомянутая аварийная категория первой степени.
На данном шаге функциональная категория автомобиля определяется как аварийная категория первой степени, если рабочее состояние по меньшей мере одного из упомянутых радиолокационных датчиков и/или электронного блока управления является аварийным.
Шаг 3023: если рабочее состояние всех упомянутых датчиков изображения является аварийным, то упомянутая функциональная категория автомобиля определяется как упомянутая аварийная категория второй степени.
На данном шаге функциональная категория автомобиля определяется как аварийная категория второй степени, если рабочее состояние всех упомянутых датчиков изображения является аварийным.
Шаг 3024: если рабочее состояние некоторых из упомянутых датчиков изображения является аварийным, то упомянутая функциональная категория автомобиля определяется как упомянутая аварийная категория третьей степени.
На данном шаге функциональная категория автомобиля определяется как аварийная категория третьей степени, если рабочее состояние некоторых из упомянутых датчиков изображения является аварийным.
По завершении шага 3022 выполняется шаг 303.
Шаг 303: подача команды о прекращении функционирования упомянутого электронного блока управления, если функциональная категория упомянутого автомобиля определена как упомянутая аварийная категория первой степени.
На данном шаге предусмотрена возможность запрета электронным блоком управления функционирования соответствующих компонентов системы автоматизированного паркинга в случае, если функциональная категория автомобиля определена как аварийная категория первой степени, чтобы пользователь не мог пользоваться данной системой.
По завершении шага 3023 выполняется шаг 304.
Шаг 304: подача команды о прекращении функционирования упомянутых датчиков изображения, если функциональная категория упомянутого автомобиля определена как упомянутая аварийная категория второй степени.
На данном шаге предусмотрена возможность запрета системой автоматизированного паркинга включения всех датчиков изображения в случае, если функциональная категория автомобиля определена как аварийная категория второй степени, и разрешения системой включения только радиолокационных датчиков и электронного блока управления.
Говоря конкретно, ввиду запрета включения датчиков изображения использование модели сверточной нейронной сети не представляется возможным. Пока автомобиль обрабатывает информацию о парковочном месте, электронный блок управления может на основе данных от радиолокационных датчиков составить виртуальную карту, в центре которой находится данный автомобиль и которая будет непрерывно совершенствоваться с поступлением новых радиолокационных данных, до тех пор, пока не будет получена информация о парковочном месте.
По завершении шага 3024 выполняется шаг 305.
Шаг 305: подача команды о прекращении функционирования тех датчиков изображения, упомянутое рабочее состояние которых определено как упомянутое аварийное состояние, если функциональная категория упомянутого автомобиля определена как упомянутая аварийная категория третьей степени.
На данном шаге предусмотрена возможность запрета системой автоматизированного паркинга включения тех датчиков изображения, рабочее состояние которых определено как аварийное, если функциональная категория автомобиля определена как аварийная категория третьей степени, и разрешения системой включения только тех датчиков изображения, рабочее состояние которых определено как исправное, при этом модель сверточной нейронной сети электронного блока управления может использоваться, однако ее точность будет в некоторой степени снижена.
Шаг 306: сбор с помощью упомянутых датчиков графических и радиолокационных данных вокруг упомянутого автомобиля, движущегося со скоростью, значение которой находится в пределах заданного интервала, причем время, в течение которого автомобиль движется со скоростью, значение которой находится в пределах заданного интервала, больше или равно заданному времени.
Данный шаг аналогичен изложенному выше шагу 101 и поэтому не будет подробно описан далее.
Шаг 307: ввод в заданную модель сверточной нейронной сети упомянутых графических и радиолокационных данных и получение на выходе упомянутой модели информации об, по меньшей мере, одном парковочном месте, причем обучение упомянутой модели сверточной нейронной сети осуществляется на основе обучающих графических и радиолокационных данных, собранных с большого количества парковочных мест различных типов.
Данный шаг аналогичен изложенному выше шагу 102 и поэтому не будет подробно описан далее.
Шаг 308: выбор из общего потока информации об, по меньшей мере, одном парковочном месте информации о конечном месте парковки в соответствии с поступившей командой о выборе места для парковки, если текущая передача, на которой движется автомобиль, является передней или холостой.
Данный шаг аналогичен изложенному выше шагу 103 и поэтому не будет подробно описан далее.
Шаг 309: генерация траектории для парковки автомобиля, по которой упомянутый автомобиль автоматически паркуется, на основе упомянутой информации о конечном месте парковки.
Данный шаг аналогичен изложенному выше шагу 104 и поэтому не будет подробно описан далее.
Исходя из вышеизложенного, способ контроля системой автоматизированного паркинга, представляемый настоящим раскрытием, включает в себя: графические и радиолокационные данные, собираемые датчиками вокруг автомобиля, движущегося со скоростью, значение которой находится в пределах заданного интервала, причем время, в течение которого автомобиль движется со скоростью, значение которой находится в пределах заданного интервала, больше или равно заданному времени; информацию об, по меньшей мере, одном парковочном месте, получаемую на выходе заданной модели сверточной нейронной сети, в которую введены графические и радиолокационные данные, причем обучение модели сверточной нейронной сети осуществляется на основе обучающих графических и радиолокационных данных, собранных с большого количества парковочных мест различных типов; информацию о конечном месте парковки, выбираемую из общего потока информации об, по меньшей мере, одном парковочном месте в соответствии с поступившей командой о выборе места для парковки, если текущая передача, на которой движется автомобиль, является передней или холостой; траекторию для автоматической парковки автомобиля, генерируемую на основе информации о конечном месте парковки. Настоящим раскрытием предусмотрена возможность заблаговременного поиска вблизи автомобиля парковочного места путем измерения скорости движения автомобиля, идентификации парковочного места для паркинга автомобиля в неоднородных ситуациях путем применения модели сверточной нейронной сети, кроме того, предусмотрена возможность предоставления информации о множестве свободных парковочных мест, что позволяет удовлетворять потребности пользователя в поиске мест для парковки различных типов, оптимизировать саму систему автоматизированного паркинга и повышать комфортабельность пользователя во время вождения.
Помимо вышесказанного, настоящим раскрытием также предусмотрена возможность настройки степеней аварийной категории, определения рабочего состояния системы автоматизированного паркинга и степени аварийной категории с помощью электронного блока управления, включения тех или иных функций в системе автоматизированного паркинга в соответствии с определенной степенью аварийной категории, а также повышения практичности системы автоматизированного паркинга и комфортабельности пользователя во время вождения тем, что помогает пользователю припарковать автомобиль, даже когда часть функций перестала срабатывать.
На Фиг. 12 представлена технологическая схема другого способа контроля системой автоматизированного паркинга, упомянутого в примере реализации настоящего раскрытия.
Шаг 401: сбор с помощью датчиков графических и радиолокационных данных вокруг упомянутого автомобиля, движущегося со скоростью, значение которой находится в пределах заданного интервала, причем время, в течение которого автомобиль движется со скоростью, значение которой находится в упомянутых пределах заданного интервала, больше или равно заданному времени.
Данный шаг аналогичен изложенному выше шагу 101 и поэтому не будет подробно описан далее.
Шаг 402: ввод упомянутых графических и упомянутых радиолокационных данных в заданную модель сверточной нейронной сети и получение на выходе упомянутой модели сверточной нейронной сети информации об, по меньшей мере, одном парковочном месте, причем обучение упомянутой модели сверточной нейронной сети осуществляется на основе обучающих графических и радиолокационных данных, собранных с большого количества парковочных мест различных типов.
Данный шаг аналогичен изложенному выше шагу 102 и поэтому не будет подробно описан далее.
Шаг 403: выбор из общего потока информации об, по меньшей мере, одном парковочном месте информации о конечном месте парковки в соответствии с поступившей командой о выборе места для парковки, если текущая передача, на которой движется автомобиль, является передней или холостой.
Данный шаг аналогичен изложенному выше шагу 103 и поэтому не будет подробно описан далее.
Шаг 404: генерация траектории для парковки автомобиля, по которой упомянутый автомобиль автоматически паркуется, на основе упомянутой информации о конечном месте парковки.
Данный шаг аналогичен изложенному выше шагу 104 и поэтому не будет подробно описан далее.
Шаг 405: сбор упомянутых данных об окружающей обстановке вокруг упомянутого автомобиля с помощью упомянутых датчиков, если в момент поступления сигнала о поиске парковочного места текущая передача упомянутого автомобиля является парковочной.
На данном шаге пользователь, намеревающийся автоматически припарковать автомобиль, может открыть интерфейс управления автоматической парковкой, подав тем самым сигнал о необходимости совершить парковку. Получив такой сигнал, электронный блок управления посредством TCU получает информацию о передаче, на которой автомобиль движется в текущий момент, и, если текущая передача автомобиля является парковочной, то радиолокационные датчики собирают радиолокационные данные об окружающей обстановке вокруг автомобиля.
Говоря конкретнее, так как траектория выезда автомобиля с места парковки более упрощённа по сравнению с траекторией заезда на место парковки, для определения направления выезда автомобиля достаточно наличие радиолокационных данных.
Шаг 406: подтверждение по меньшей мере одного направления выезда упомянутого автомобиля в места парковки на основе данных об окружающей обстановке.
На данном шаге предусмотрена возможность получения электронным блоком управления из общих данных об окружающей обстановке конкретных данных о расстоянии от автомобиля до преград, если таковые имеются поблизости, и подтверждения направления выезда автомобиля с места парковки в соответствии с полученными данными об окружающей обстановке.
Говоря конкретнее, данные об окружающей обстановке могут быть как радиолокационными, так и графическими. Если расстояние от автомобиля до присутствующих вокруг него преград больше заданного значения, автомобилем запускается программа автоматического паркинга. После включения функции автоматического паркинга электронный блок управления создает на основе имеющихся радиолокационных данных виртуальную карту участка, по которой определяет направление выезда автомобиля с места парковки. Направлением выезда автомобиля с места парковки может быть одно или комбинация нескольких из следующих направлений: выезд передним ходом, выезд задним ходом, выезд налево и выезд направо.
Например, если в момент, когда пользователь намеревается выехать с парковки, слева от места, в котором припаркован его автомобиль, находится автомобильная дорога, справа от указанного места - стена, сзади от него стоят другие автомобили, а спереди автомобилей нет, то электронный блок управления создает на основе имеющихся радиолокационных данных виртуальную карту участка, по которой определяет для выезда данного автомобиля с места парковки следующую комбинацию направлений: выезд передним ходом с поворотом налево.
Шаг 407: отображение интерфейса управления выездом автомобиля с места парковки, в котором указано по меньшей мере одно из упомянутых направлений выезда с парковки.
На данном шаге после выбора электронным блоком управления направления выезда автомобиля в места парковки происходит переход с интерфейса управления автоматическим выездом к интерфейсу управления выездом автомобиля с места парковки, в котором указано направление выезда.
Говоря конкретнее, на Фиг. 13 представлена схема выбора направления для выезда с места парковки, функцией которого обладает система автоматизированного паркинга, упомянутая в примере реализации настоящего раскрытия, в том числе представлен интерфейс управления выездом автомобиля с места парковки, отображающий четыре идентифицированных автомобилем вокруг себя направления выезда, из которых пользователь может выбрать в соответствии со своими фактическими потребностями.
Шаг 408: выбор конечного направления из упомянутых направлений выезда при поступлении команды о выезде с места парковки.
На данном шаге предусмотрена возможность выбора электронным блоком управления из имеющихся направлений конечного направления для вывода автомобиля с места парковки при поступлении от пользователя команды о выезде с парковки.
Шаг 409: генерация траектории для выезда автомобиля с места парковки, по которой упомянутый автомобиль автоматически выедет с места парковки, на основе упомянутой информации о конечном направлении выезда с парковки.
На данном шаге предусмотрена возможность генерации электронным блоком управления траектории для выезда автомобиля с места парковки на основе информации о конечном направлении выезда, при этом электронный блок управления, взаимодействуя с ESP, EPS и TCU в управлении направлением движения, а также процессами переключения передач, торможения и остановки, автоматически выводит автомобиль с конечного места парковки по сгенерированной траектории.
Говоря конкретно, электронный блок управления может сравнивать фактическое местонахождение автомобиля с конечной точкой, соответствующей конечному направлению выезда с места парковки, рассчитывать относительную дистанцию между автомобилем и конечной точкой и составлять на основе результата расчетов необходимую систему координат. Такая система координат позволит электронному блоку управления определить место по координатам, радиус поворота и угол, заключенный между автомобилем и конечным парковочным местом, чтобы рассчитать траекторию выезда с парковки. Прежде чем автомобиль начнет автоматически парковаться, ESP может по командам, подаваемым электронным блоком управления, постоянно контролировать скорость и процессы торможения автомобиля, EPS может по командам, подаваемым электронным блоком управления, постоянно контролировать направление движения автомобиля, а TCU может по командам, подаваемым электронным блоком управления, постоянно контролировать процессы переключения передач, пока автомобиль не будет полностью заведен на конечное парковочное место и не будет завершен процесс автоматической парковки.
Оптимальное решение, предлагаемое настоящим раскрытием, заключается в том, что электронный блок управления может аналогично подавать команду о временном прекращении процесса автоматической парковки, если в таком процессе обнаруживается, что автомобиль находится в аномальном состоянии, и возобновлять процесс после того, как такое аномальное состояние будет устранено.
На Фиг. 14 представлена схема упомянутого в примере реализации настоящего раскрытия процесса автоматизированного паркинга другого типа. Как видно на Фиг. 14, в то время, когда автомобиль ожидает от пользователя команды о выборе направления выезда с парковки, электронный блок управления может по команде о выборе действия «Выехать с парковки» подтверждать переход к этапу подготовки к выезду с места парковки, при этом электронный блок управления вступает во взаимодействие со всеми остальными системами и, если взаимодействие проходит безотказно, автомобиль начинает выезжать с парковочного места, а если такое взаимодействие не удалось, то процесс автоматического выезда с парковки прекращается. Если взаимодействие электронного блока управления и всех остальных систем проходит безотказно, то автомобиль начинает автоматически выезжать с места парковки. Если автомобиль находится в аномальном состоянии, то электронный блок управления подает команду о временном прекращении выезда с парковки. В случае если время, в течение которого автомобиль пребывает в аномальном состоянии, превышает заданное время прерывания процесса выезда, электронный блок управления может завершить процесс автоматического выезда с парковки. После того как аномальное состояние автомобиля устранено, пользователь может выбрать либо продолжение автоматического выезда с парковки нажатием кнопки «Продолжить автоматически выезжать с парковки», либо прекращение автоматической парковки нажатием кнопки «Завершить автоматический выезд с парковки».
Исходя из вышеизложенного, способ контроля системой автоматизированного паркинга, представляемый настоящим раскрытием, включает в себя: графические и радиолокационные данные, собираемые датчиками вокруг автомобиля, движущегося со скоростью, значение которой находится в пределах заданного интервала, причем время, в течение которого автомобиль движется со скоростью, значение которой находится в пределах заданного интервала, больше или равно заданному времени; информацию об, по меньшей мере, одном парковочном месте, получаемую на выходе заданной модели сверточной нейронной сети, в которую введены графические и радиолокационные данные, причем обучение модели сверточной нейронной сети осуществляется на основе обучающих графических и радиолокационных данных, собранных с большого количества парковочных мест различных типов; информацию о конечном месте парковки, выбираемую из общего потока информации об, по меньшей мере, одном парковочном месте в соответствии с поступившей командой о выборе места для парковки, если текущая передача, на которой движется автомобиль, является передней или холостой; траекторию для автоматической парковки автомобиля, генерируемую на основе информации о конечном месте парковки. Настоящим раскрытием предусмотрена возможность заблаговременного поиска вблизи автомобиля парковочного места путем измерения скорости движения автомобиля, идентификации парковочного места для паркинга автомобиля в неоднородных ситуациях путем применения модели сверточной нейронной сети, кроме того, предусмотрена возможность предоставления информации о множестве свободных парковочных мест, что позволяет удовлетворять потребности пользователя в поиске мест для парковки различных типов, оптимизировать саму систему автоматизированного паркинга и повышать комфортабельность пользователя во время вождения.
Помимо вышесказанного, настоящим раскрытием также предусмотрена возможность планирования системой автоматизированного паркинга траектории движения автомобиля при выезде с места парковки на основе имеющихся радиолокационных данных, благодаря чему пользователь освобождается от необходимости самому вести автомобиль, чтобы выехать с парковки, оптимизируется сама система автоматизированного паркинга и повышается комфортабельность пользователя во время вождения.
На основе вышеприведенного примера реализации настоящим раскрытием также представлены устройства для реализации способа контроля системой автоматизированного паркинга.
На Фиг. 15 представлен чертеж конструкции упомянутого в примере реализации настоящего раскрытия устройства для реализации способа контроля системой автоматизированного паркинга, опционально содержащего в себе следующие модули:
Первый модуль сбора данных 501, используемый для сбора с помощью упомянутых датчиков графических и радиолокационных данных вокруг упомянутого автомобиля, движущегося со скоростью, значение которой находится в пределах заданного интервала, причем время, в течение которого автомобиль движется со скоростью, значение которой находится в пределах заданного интервала, больше или равно заданному времени;
Модуль нейронной сети 502, используемый для ввода упомянутых графических и упомянутых радиолокационных данных в заданную модель сверточной нейронной сети и получения на выходе упомянутой модели сверточной нейронной сети информации об, по меньшей мере, одном парковочном месте, причем обучение упомянутой модели сверточной нейронной сети осуществляется на основе обучающих графических и радиолокационных данных, собранных с большого количества парковочных мест различных типов;
Модуль выбора действия «Парковаться» 503, используемый для выбора информации о конечном месте парковки из общего потока информации об, по меньшей мере, одном упомянутом парковочном месте в соответствии с поступившей командой о выборе места для парковки, если текущая передача, на которой движется упомянутый автомобиль, является передней или холостой;
Модуль выбора траектории 504, используемый для генерации траектории для парковки автомобиля, по которой упомянутый автомобиль автоматически паркуется, на основе упомянутой информации о конечном месте парковки.
Опционально, представляемое настоящим раскрытием устройство для реализации способа контроля системой автоматизированного паркинга включает в себя, помимо прочего:
Модуль измерения 505, используемый для определения рабочих состояний упомянутых датчиков изображения, радиолокационных датчиков и электронного блока управления при запуске упомянутого автомобиля, причем различаются исправное и аварийное состояния;
Модуль определения функциональной категории 506, используемый для определения функциональной категории упомянутого автомобиля на основе упомянутых рабочих состояний.
Опционально, упомянутый модуль определения функциональной категории 506 включает в себя:
Первый подмодуль подтверждения 5061, используемый для подтверждения того, что функциональная категория упомянутого автомобиля определена как упомянутая категория нормального функционирования, если рабочее состояние упомянутых датчиков изображения, радиолокационных датчиков и электронного блока управления является исправным;
Второй подмодуль подтверждения 5062, используемый для подтверждения того, что функциональная категория упомянутого автомобиля определена как упомянутая аварийная категория первой степени, если рабочее состояние по меньшей мере одного из упомянутых радиолокационных датчиков и/или электронного блока управления является аварийным;
Третий подмодуль подтверждения 5063, используемый для подтверждения того, что функциональная категория упомянутого автомобиля определена как упомянутая аварийная категория второй степени, если рабочее состояние всех упомянутых датчиков изображения является аварийным;
Четвертый подмодуль подтверждения 5064, используемый для подтверждения того, что функциональная категория упомянутого автомобиля определена как упомянутая аварийная категория третьей степени, если рабочее состояние некоторых из упомянутых датчиков изображения является аварийным.
Опционально, представляемое настоящим раскрытием устройство для реализации способа контроля системой автоматизированного паркинга включает в себя, помимо прочего:
Первый контрольный модуль 507, роль которого заключается в подаче команды о прекращении функционирования упомянутого электронного блока управления в случае, если функциональная категория упомянутого автомобиля определена как упомянутая аварийная категория первой степени;
Второй контрольный модуль 508, роль которого заключается в подаче команды о прекращении функционирования упомянутых датчиков изображения в случае, если функциональная категория упомянутого автомобиля определена как упомянутая аварийная категория второй степени;
Третий контрольный модуль 509, роль которого заключается в подаче команды о прекращении функционирования тех датчиков изображения, упомянутое рабочее состояние которых определено как упомянутое аварийное состояние, в случае, если функциональная категория упомянутого автомобиля определена как упомянутая аварийная категория третьей степени.
Опционально, информация об упомянутом парковочном месте включает с себя один или несколько из любых следующих типов информации: информация о наличии в парковочном месте дорожных конусов, информация о наличии в парковочном месте знаков, запрещающих парковку, информация о наличии в парковочном месте парковочного барьера, информация о наличии в парковочном месте разметок и информация о наличии в парковочном месте преград.
Опционально, упомянутый модуль нейронной сети 502 включает в себя:
Подмодуль ввода 5021, используемый для ввода упомянутых графических и упомянутых радиолокационных данных в модель сверточной нейронной сети и получения упомянутой моделью сверточной нейронной сети информации об упомянутом парковочном месте, в том числе о его категории;
Первый подмодуль вывода 5022, используемый для получения на выходе упомянутой модели сверточной нейронной сети информации об упомянутом парковочном месте, в том числе о его категории;
Опционально, упомянутый модуль нейронной сети 502 включает в себя:
Подмодуль определения направления парковки в угловом парковочном месте 5023, используемый для определения упомянутой моделью сверточной нейронной сети в отношении упомянутого углового парковочного места направления парковки на основе упомянутых графических и радиолокационных данных, если упомянутое парковочное место является угловым; упомянутая информация о парковочном месте, получаемая на выходе упомянутой модели сверточной нейронной сети, включает в себя в том числе и информацию о направлении парковки для упомянутого углового парковочного места.
Опционально, упомянутый модуль выбора действия «Парковаться» 503 включает в себя:
Подмодуль отображения 5031, используемый для отображения интерфейса управления парковкой, содержащего информацию об, по меньшей мере, одном из упомянутых парковочных мест, если в момент поступления сигнала о поиске парковочного места текущая передача, на которой движется упомянутый автомобиль, является упомянутой передней или упомянутой холостой передачей;
Подмодуль выбора 5032, используемый для выбора информации о конечном месте парковки из общего потока информации об, по меньшей мере, одном упомянутом парковочном месте при поступлении команды о выборе места для парковки, соответствующей упомянутому интерфейсу управления парковкой.
Опционально, представляемые настоящим раскрытием устройства для реализации способа контроля системой автоматизированного паркинга включают в себя, помимо прочего:
Второй модуль сбора данных 510, используемый для сбора упомянутых данных об окружающей обстановке вокруг упомянутого автомобиля с помощью упомянутых датчиков, если в момент поступления сигнала о поиске парковочного места текущая передача упомянутого автомобиля является парковочной;
Модуль подтверждения 511, используемый для подтверждения по меньшей мере одного направления выезда упомянутого автомобиля в места парковки на основе упомянутых данных об окружающей обстановке;
Модуль отображения 512, используемый для отображения интерфейса управления выездом автомобиля с места парковки, содержащего по меньшей мере одно из упомянутых направлений выезда;
Модуль выбора действия «Выехать с места парковки» 513, используемый для выбора из упомянутых направлений выезда с места парковки конечного направления выезда в соответствии с поступившей командой о выезде с места парковки;
Модуль определения траектории выезда с места парковки 514, используемый для генерации траектории для выезда автомобиля с места парковки, по которой упомянутый автомобиль на основе упомянутой информации о конечном направлении выезда автоматически выезжает с парковочного места.
Опционально, представляемое настоящим раскрытием устройство для реализации способа контроля системой автоматизированного паркинга включает в себя, помимо прочего:
Модуль временного прекращения паркинга 515, используемый для подачи команды о временном прекращении процесса автоматического паркинга в случае, если выявляется аномальное состояние упомянутого автомобиля;
Модуль возобновления паркинга 516, используемый для подачи команды о продолжении процесса автоматического паркинга упомянутого автомобиля в случае подтверждения того, что упомянутое аномальное состояние упомянутого автомобиля устранено.
Опционально, предусмотрена возможность установления того, что автомобиль находится в упомянутом аномальном состоянии, если имеет место по меньшей мере одно из нижеследующих обстоятельств:
Упомянутый автомобиль находится в том состоянии, когда водитель не пристегнут ремнем безопасности;
Упомянутый автомобиль находится в том состоянии, когда его двери не закрыты;
На траектории для парковки упомянутого автомобиля появляется преграда.
Исходя из вышеизложенного, устройство для реализации способа контроля системой автоматизированного паркинга, представляемое настоящим раскрытием, включает в себя: графические и радиолокационные данные, собираемые датчиками вокруг автомобиля, движущегося со скоростью, значение которой находится в пределах заданного интервала, причем время, в течение которого автомобиль движется со скоростью, значение которой находится в пределах заданного интервала, больше или равно заданному времени; информацию об, по меньшей мере, одном парковочном месте, получаемую на выходе заданной модели сверточной нейронной сети, в которую введены графические и радиолокационные данные, причем обучение модели сверточной нейронной сети осуществляется на основе обучающих графических и радиолокационных данных, собранных с большого количества парковочных мест различных типов; информацию о конечном месте парковки, выбираемую из общего потока информации об, по меньшей мере, одном парковочном месте в соответствии с поступившей командой о выборе места для парковки, если текущая передача, на которой движется автомобиль, является передней или холостой; траекторию для автоматической парковки автомобиля, генерируемую на основе информации о конечном месте парковки. Настоящим раскрытием предусмотрена возможность заблаговременного поиска вблизи автомобиля парковочного места путем измерения скорости движения автомобиля, идентификации парковочного места для паркинга автомобиля в неоднородных ситуациях путем применения модели сверточной нейронной сети, кроме того, предусмотрена возможность предоставления информации о множестве свободных парковочных мест, что позволяет удовлетворять потребности пользователя в поиске мест для парковки различных типов, оптимизировать саму систему автоматизированного паркинга и повышать комфортабельность пользователя во время вождения.
Технические работники данной области могут легко понять, что для удобства и упрощения процесса описания конкретные принципы действия вышеперечисленных систем, устройств и блоков аналогичны принципам, приведенным в примере реализации представляемого настоящим раскрытием способа, и в дальнейшем не будут повторно описываться.
Приведенный выше пример является примером оптимального варианта применения настоящего раскрытия, но не ставит каких-либо границ в его реализации. Любые изменения, адекватные замены или доработки, проделанные с настоящим раскрытием без нарушения его основной идеи и принципов, являются объектами патентных прав и подлежат охране в рамках настоящей заявки.
Приведенный выше пример является лишь конкретным примером реализации настоящего раскрытия и не ставит каких-либо границ в его реализации. Любые изменения или замены, до которых могут додуматься технические работники, хорошо осведомленные в данной технологической области, и которые не выходят за пределы технической сферы настоящего раскрытия, являются объектами патентных прав и подлежат охране в рамках настоящей заявки, в связи с чем в качестве границ патентных прав в отношении настоящего раскрытия должны быть взяты границы патентных прав в отношении приведенной в настоящей заявке Формулы изобретения.
Вышеописанный пример реализации устройств служит лишь в качестве средства наглядности, причем под разделением элементов, описанных как отдельные части, может иметься в виду как физическое, так и нефизическое разделение, элементами, служащими для отображения блоков, могут быть как физические, так и нефизические блоки, т.е. элементы могут находиться в одном месте, а могут и быть распределены по разным сетевым блокам. Задачи, поставленные данным примером реализации раскрытия, могут выполняться с применением всех или части модулей, выбранных в соответствии с фактическими потребностями реализующего. Технические работники данной области могут без созидательного труда понять и реализовать данный пример.
Примеры реализации различных частей настоящего раскрытия могут осуществляться посредством аппаратного обеспечения или модулей программного обеспечения, функционирующих в одном или нескольких процессорах, или же одновременно посредством и того, и другого. Технические работники данной сферы должны понимать, что все или часть функций всех или части элементов вычислительно-обрабатывающего оборудования, представленного в примере реализации настоящего раскрытия, могут на практике выполняться микропроцессорами или цифровыми сигнальными процессорами (DSP). Кроме того, в рамках настоящего раскрытия также могут быть реализованы программы (например, компьютерные программы и их продукты) всех или части оборудования или устройств, используемых для реализации описываемого в настоящей заявке способа. Такие программы для реализации настоящего раскрытия могут храниться в машинно-считываемой среде или быть в форме одного или множества сигналов, которые можно скачать с Интернет сайтов, а также предоставить на носителях сигналов или в любой иной форме.
Например, на Фиг. 16 представлено вычислительно-обрабатывающее оборудование, с помощью которого реализуется способ, представляемый настоящим раскрытием. Традиционно такое вычислительно-обрабатывающее оборудование состоит из процессора 1010 и компьютерной программы или машинно-считываемой среды в виде запоминающего устройства 1020. Запоминающим устройством 1020 может служить электронное запоминающее устройство, такое как флэш-память, EEPROM (электрически стираемое перепрограммируемое постоянное запоминающее устройство), EPROM (полупроводниковое запоминающее устройство для программирования), жесткий диск или ROM (постоянное запоминающее устройство). В запоминающем устройстве 1020 имеется пространство 1030 для накопления программных кодов 1031, используемых для реализации любых из шагов применения вышеописанного способа. Например, пространство 1030 для накопления программных кодов может содержать в себе программные коды 1031, используемые для реализации каждого шага применения предложенного способа. Данные программные коды могут быть считаны или введены из одного или нескольких продуктов компьютерных программ в один или несколько продуктов компьютерных программ, к которым относятся такие носители программных кодов, как жесткие диски, компакт-диски (CD), карты памяти или магнитные диски. Чаще всего в качестве такого продукта компьютерной программы используется портативный или фиксированный запоминающий блок, проиллюстрированный на Фиг. 17. В таком запоминающем блоке может быть тот же сегмент или пространство для накопления, подобный запоминающему устройству 1020 в вычислительно-обрабатывающем оборудовании, представленном на Фиг. 16. Программные коды могут быть соответствующим образом сжаты. Обычно запоминающие блоки содержат в себе машинно-считываемые коды 1031’, т.е. коды, считываемые процессорами, подобными процессору 1010. Обрабатывая эти коды, вычислительно-обрабатывающее оборудование реализует все шаги применения вышеописанного способа.
Выражения «пример реализации» или «один или много примеров реализации», встречающиеся в тексте, означают, что особые признаки, структуры или характеристики, собираемые в описании примера/примеров реализации, объединены по меньшей мере в один пример реализации настоящего раскрытия. Кроме того, следует обратить внимание на то, что встречающееся в тексте выражение «в примере реализации» не означает, что существует только один такой пример и речь идет в каждом случае об одном и том же примере.
В настоящей заявке приведено множество конкретных деталей, однако допустимо, если варианты применения объектов настоящего раскрытия будут реализоваться без учета таких деталей. Для того, чтобы не усложнять процесс понимания содержания настоящей заявки, в примере реализации представленного в ней раскрытия не приведены в подробностях общеизвестные способы, конструкции и технологии.
Никакие референтные символы, заключенные в скобки в пунктах Формулы изобретения, не должны использоваться в качестве критериев для установления ограничений в ее отношении. Выражение «состоять из», или «содержать в себе», не исключает возможность существования компонентов или операций, отличных от тех, что перечислены в Формуле изобретения. Называние того или иного компонента в единственном числе вовсе не означает, что более не существует других подобных компонентов. Настоящее раскрытие может быть реализовано посредством аппаратуры с различными компонентами и компьютера с подходящим языком программирования. Различные установки, перечисленные в пунктах Формулы изобретения, могут быть представлены посредством одной и той же аппаратуры. Выражения «во-первых», «во-вторых», «в-третьих» и т.д. не указывают на какую-либо последовательность. Такие выражения могут быть поняты как наименования.
Напоследок следует отметить, что данный пример реализации служит лишь для описания технических решений, представленных в настоящем раскрытии, и вовсе не ставят на них какие-либо ограничения. Несмотря на то, что в изложенном выше примере реализации дано детальное описание настоящего раскрытия, рядовые технические работники данной области должны понимать, что они могут вносить в технические решения, представленные в вышеизложенном примере реализации, те или иные изменения или производить адекватную замену части технических особенностей, если при таких изменениях или заменах не исчезает сущность и не происходит выход за пределы тех технических решений, которые предлагает приведенный в настоящей патентной заявке пример реализации раскрытия.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматической парковки, а также устройства и системы для его реализации. | 2020 |
|
RU2798256C1 |
| Способ интеллектуальной парковки и устройства для его реализации | 2020 |
|
RU2793737C1 |
| Информационная система зарядной сети для электромобилей и способ ее работы | 2023 |
|
RU2815521C1 |
| СПОСОБ ПАРКОВКИ АВТОМОБИЛЕЙ ПО ВИШНЕВСКОМУ | 2011 |
|
RU2463420C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ПАРКОВКИ И СЕРВЕР | 2020 |
|
RU2741449C1 |
| МНОГОЭТАЖНЫЙ АВТОМАТИЗИРОВАННЫЙ ПАРКИНГ | 2008 |
|
RU2372460C1 |
| ПАРКОВОЧНАЯ СИСТЕМА НА ОСНОВЕ QR-КОДА И СПОСОБ УПРАВЛЕНИЯ ПАРКОВОЧНОЙ СИСТЕМОЙ | 2021 |
|
RU2763605C1 |
| СПОСОБ И СИСТЕМА ПРЕДУПРЕЖДЕНИЯ О ПАРКОВОЧНОМ БАРЬЕРЕ НА ОСНОВАНИИ ИСТОРИИ ДВИЖЕНИЯ | 2016 |
|
RU2729137C2 |
| Система обнаружения, мониторинга свободных парковочных мест и виртуальной охраны припаркованного транспортного средства "Купол" | 2021 |
|
RU2775022C1 |
| СПОСОБ ПАРКОВКИ АВТОМОБИЛЯ В МНОГОЯРУСНОМ АВТОМАТИЗИРОВАННОМ ПАРКИНГЕ И СИСТЕМА ПАРКОВКИ ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА (ВАРИАНТЫ) | 2016 |
|
RU2634155C1 |
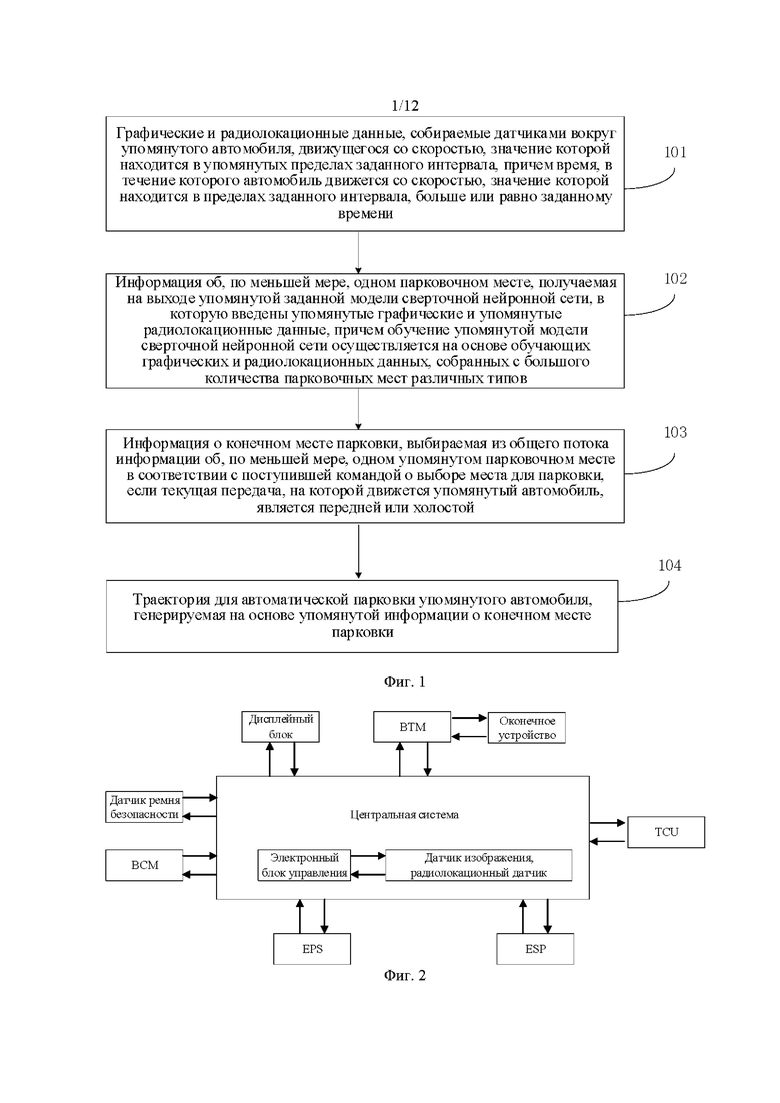
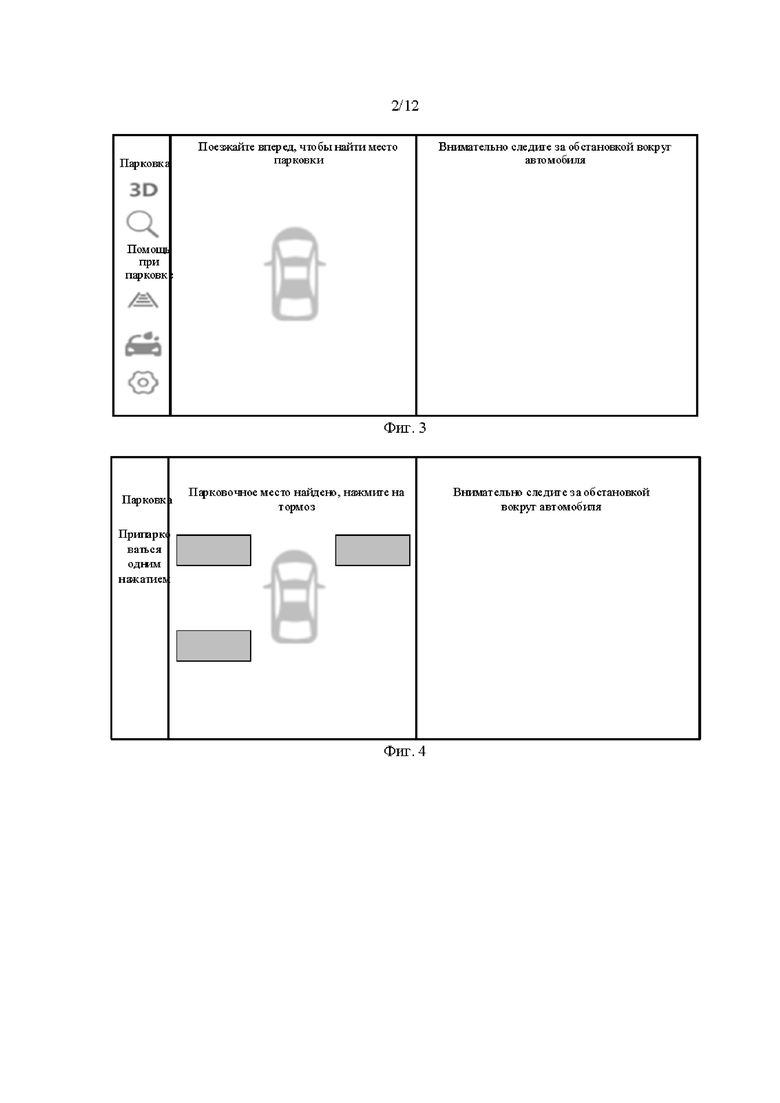
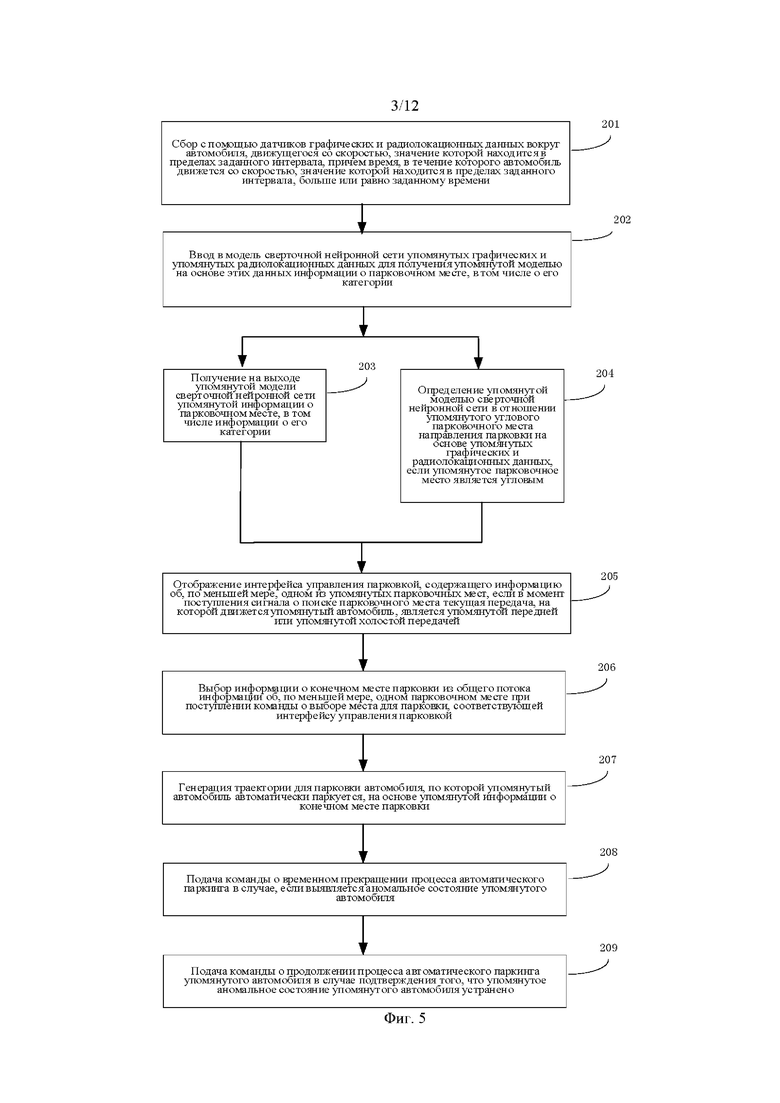
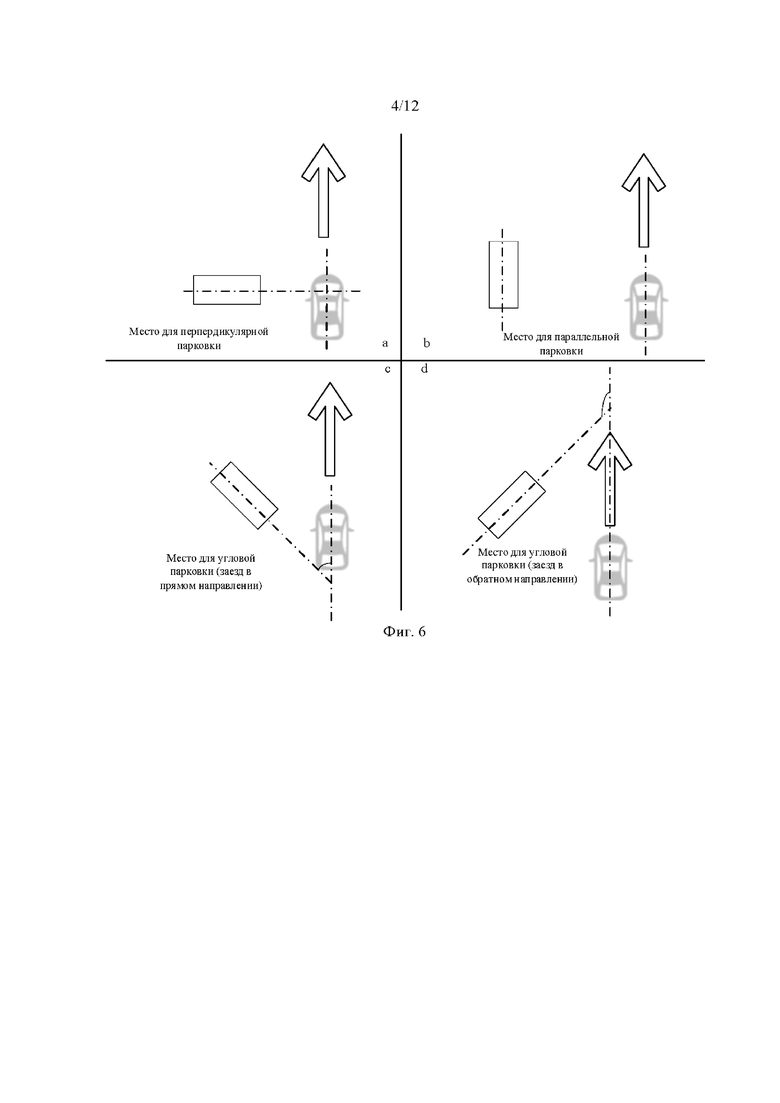
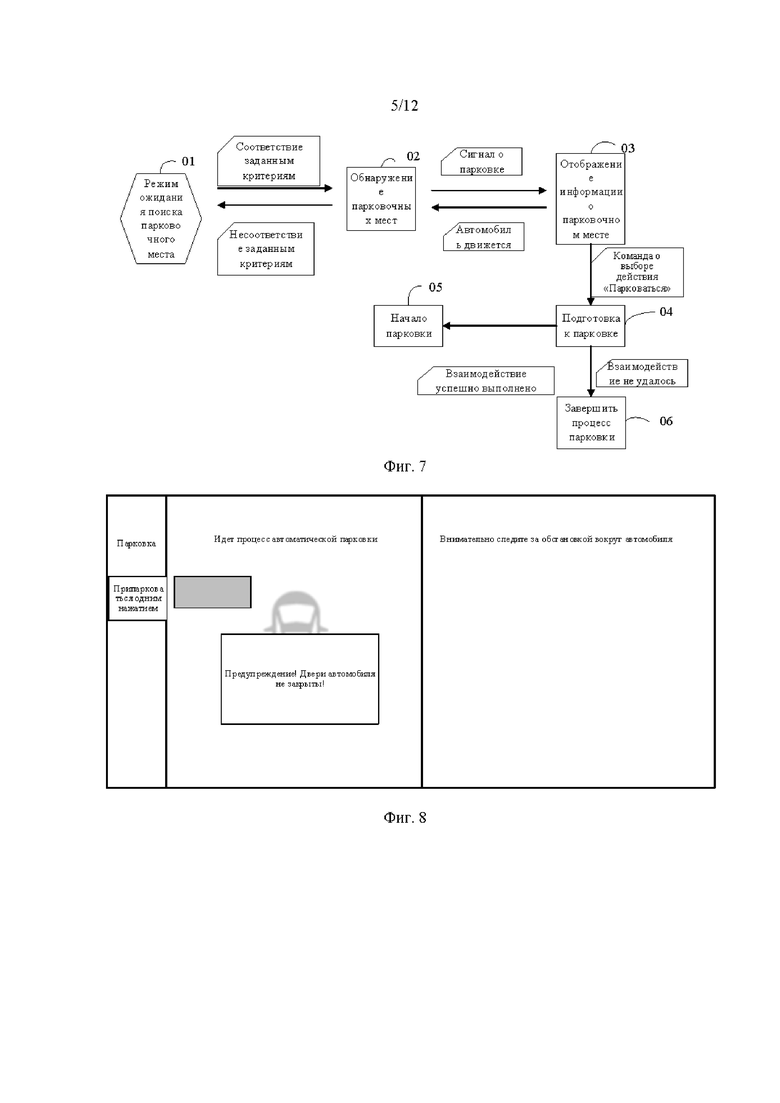
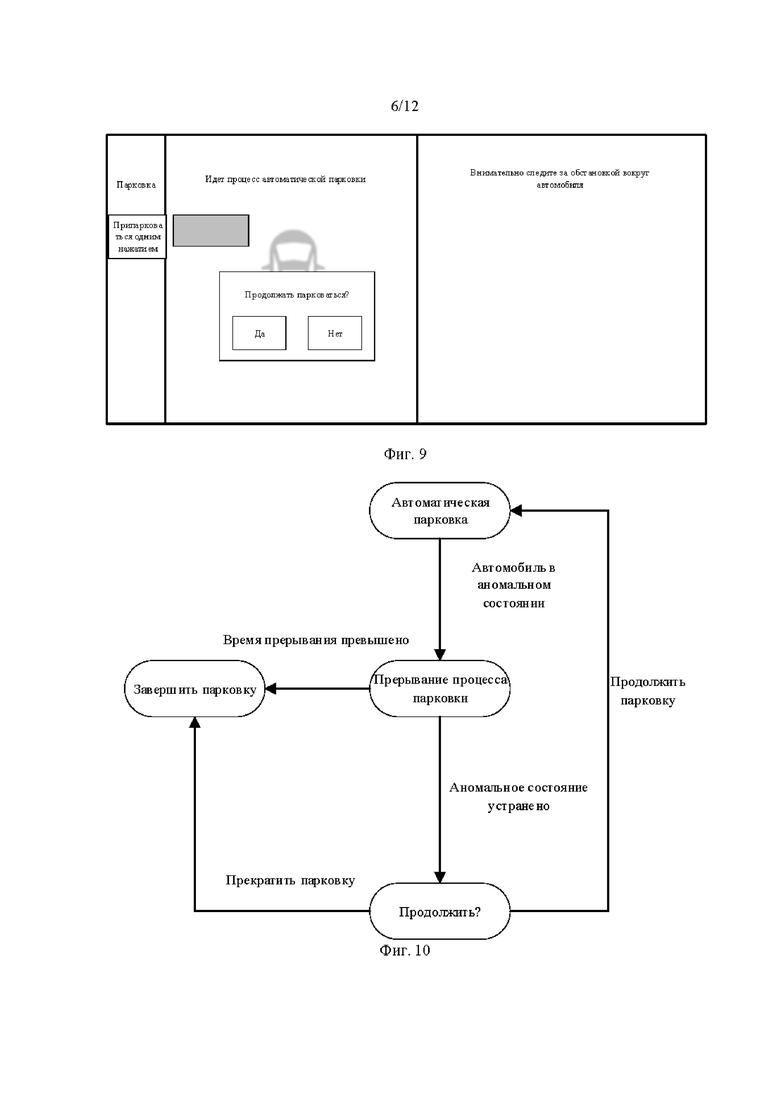
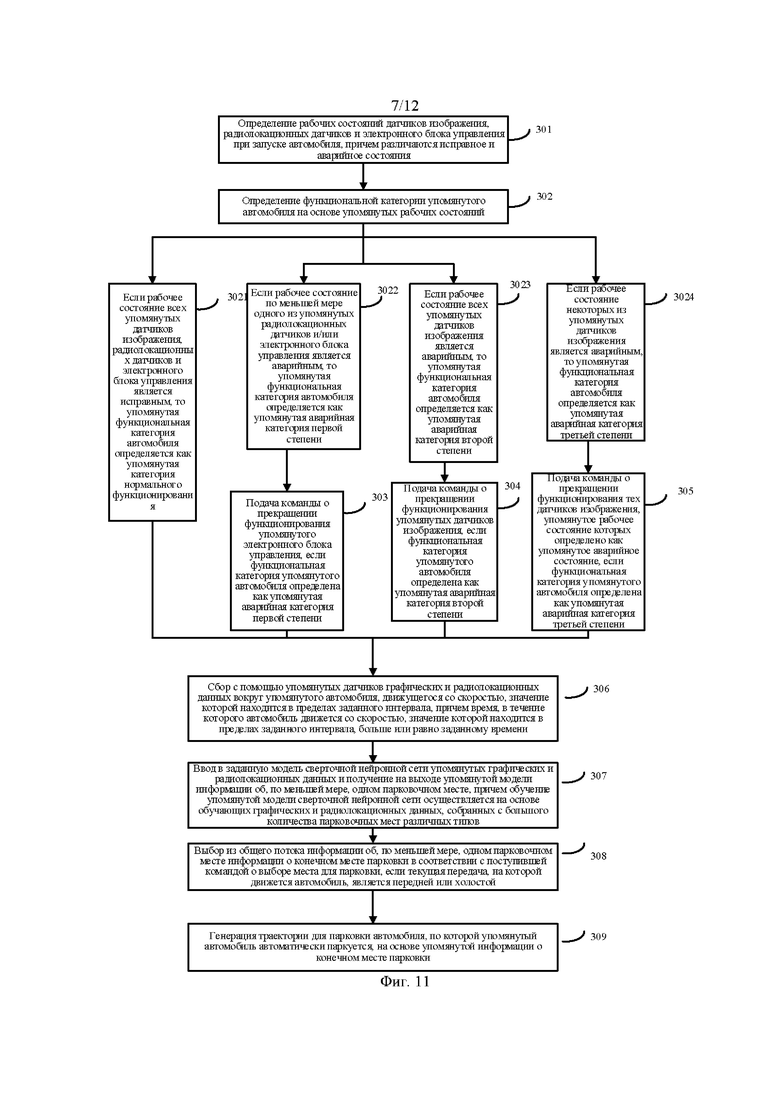
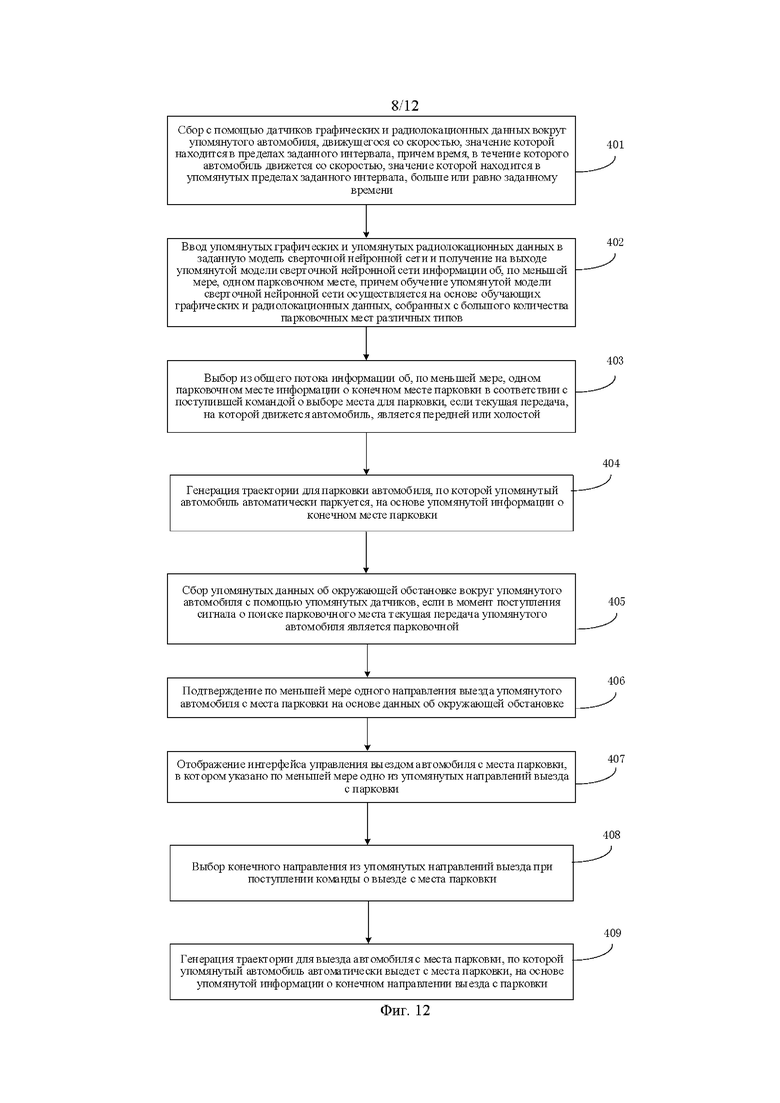
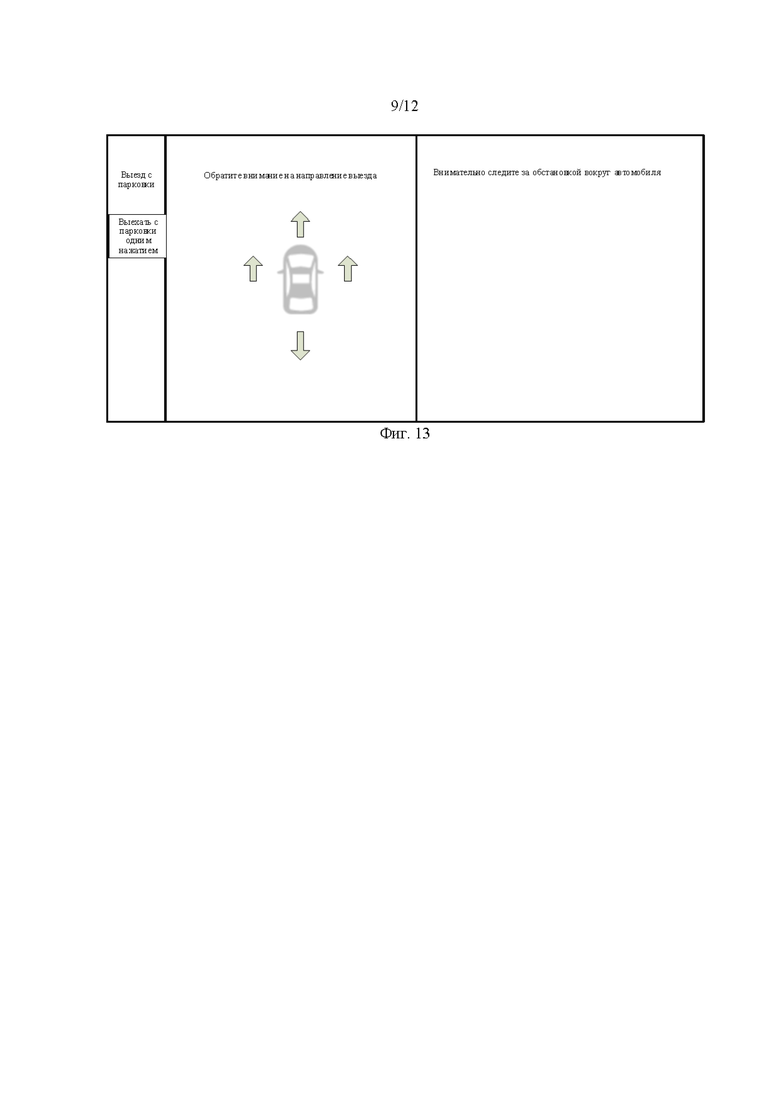
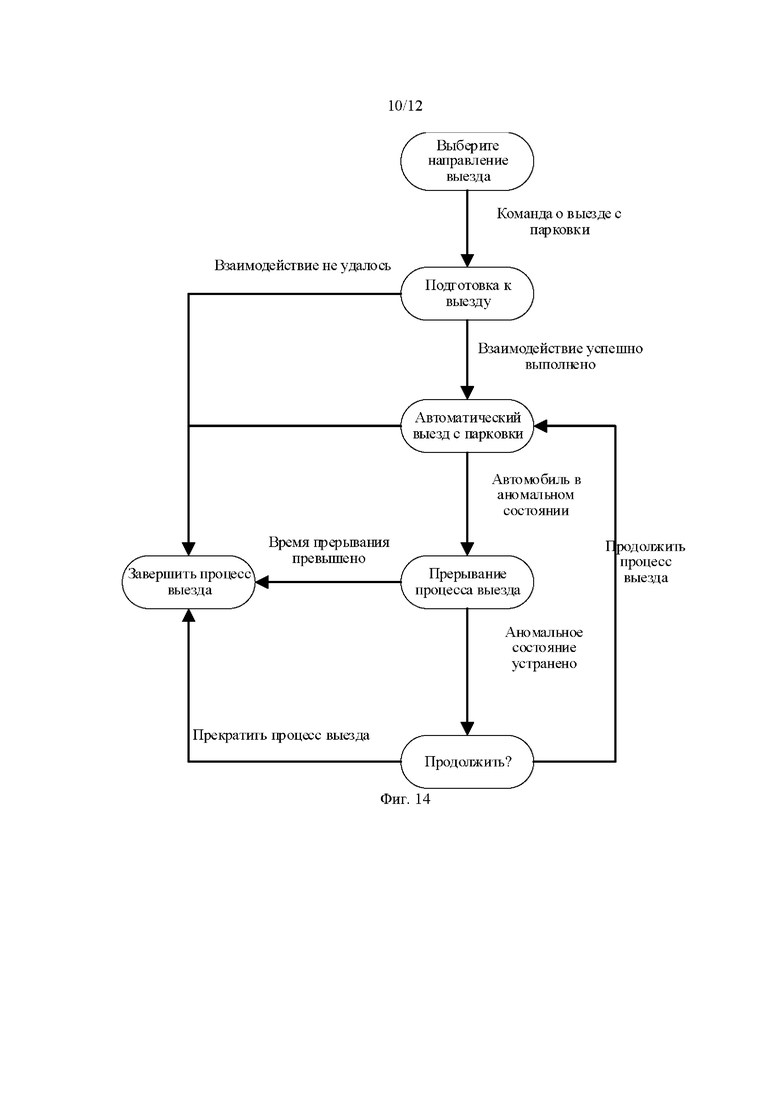
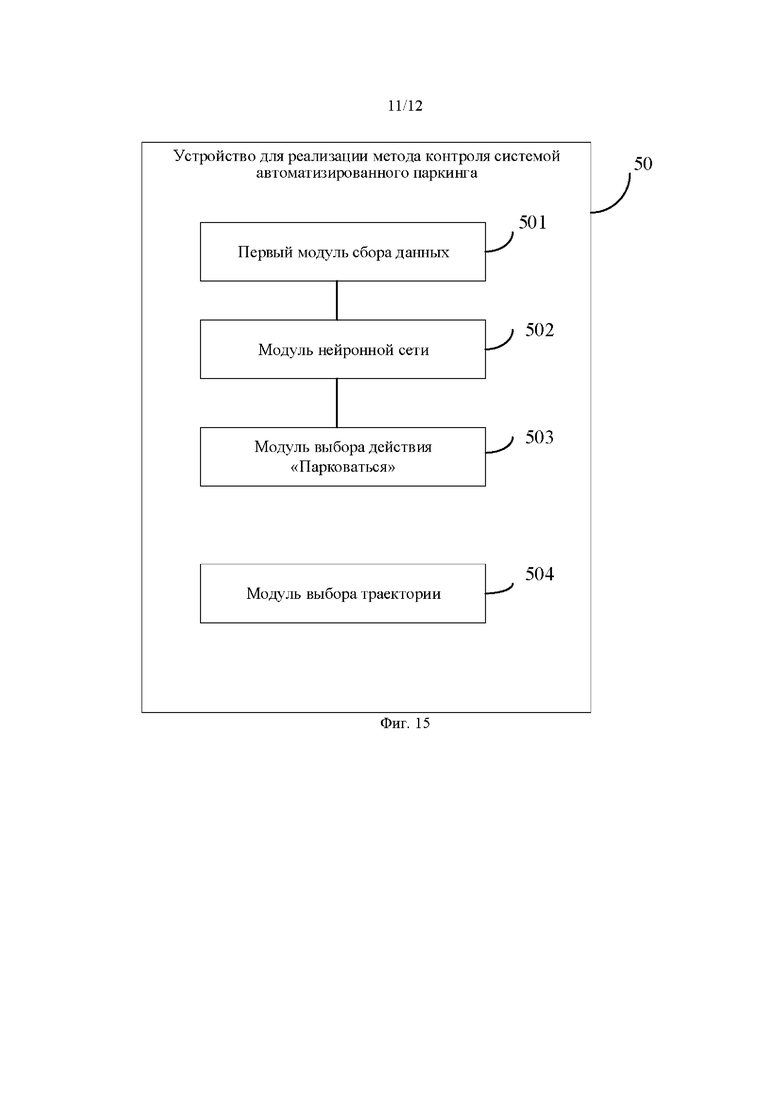
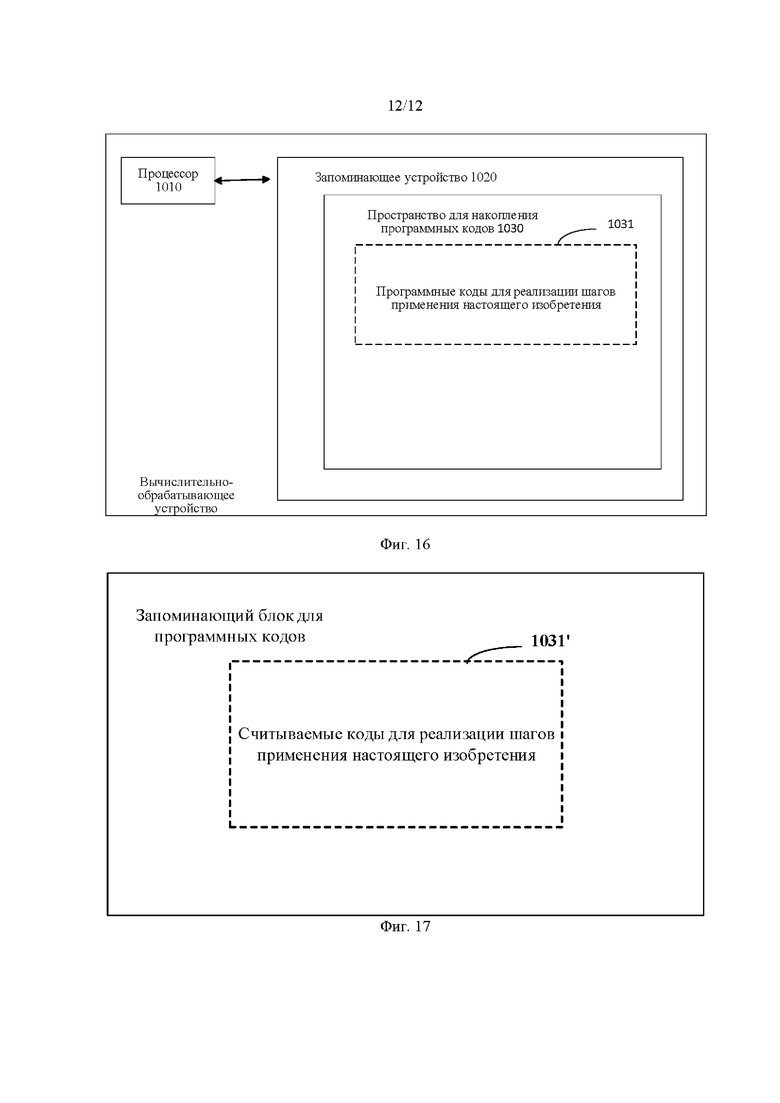
Группа изобретений относится к области автомобилестроения, в частности к способу контроля системой автоматизированного паркинга и устройству для его реализации. Устройство включает в себя первый модуль сбора данных, используемый для сбора с помощью датчиков графических и радиолокационных данных вокруг автомобиля, модуль нейронной сети, используемый для ввода графических и радиолокационных данных в заданную модель сверточной нейронной сети и получения на выходе модели сверточной нейронной сети информации о парковочном месте, модуль выбора действия «Парковаться», используемый для выбора информации о конечном месте парковки из общего потока информации о парковочном месте в соответствии с поступившей командой о выборе места для парковки, модуль выбора траектории, модуль измерения и модуль определения функциональной категории. Достигается возможность заблаговременного поиска вблизи автомобиля парковочного места, что повышает комфортабельность пользователя во время вождения. 4 н. и 10 з.п. ф-лы, 17 ил.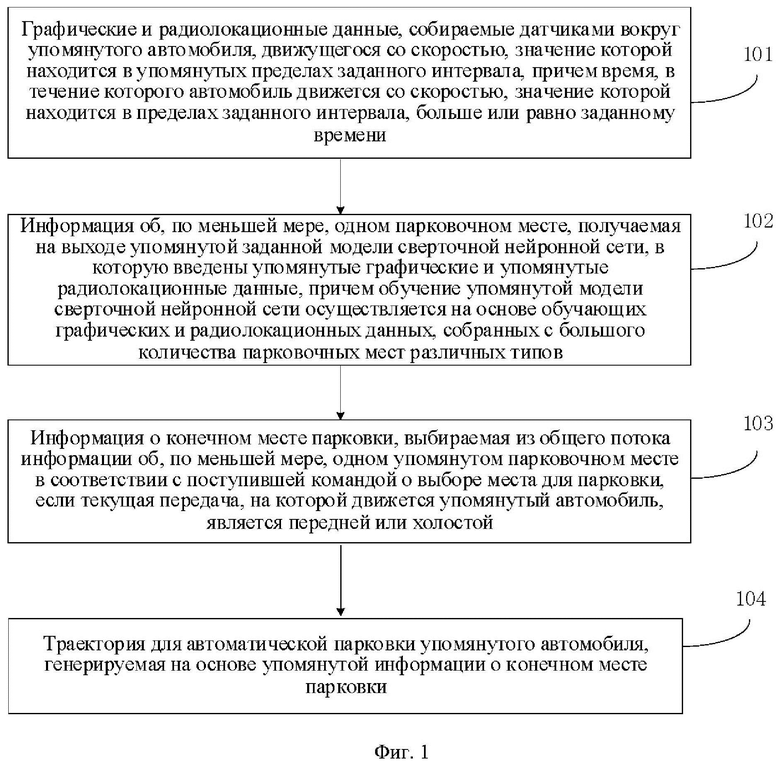
1. Способ контроля системой автоматизированного паркинга, отличающийся тем, что применяется к автомобилям, оборудованным датчиками, и включает в себя:
графические и радиолокационные данные, собираемые упомянутыми датчиками вокруг автомобиля, движущегося со скоростью, значение которой находится в пределах заданного интервала, причем время, в течение которого автомобиль движется со скоростью, значение которой находится в пределах заданного интервала, больше или равно заданному времени;
информацию об, по меньшей мере, одном парковочном месте, получаемую на выходе заданной модели сверточной нейронной сети, в которую введены упомянутые графические и радиолокационные данные, причем обучение упомянутой модели сверточной нейронной сети осуществляется на основе обучающих графических и радиолокационных данных, собранных с большого количества парковочных мест различных типов;
если текущая передача, на которой движется автомобиль, является передней или холостой, то информация о конечном месте парковки выбирается из общего потока информации об, по меньшей мере, одном парковочном месте в соответствии с поступившей командой о выборе места для парковки;
на основе упомянутой информации о конечном месте парковки происходит генерация траектории для парковки автомобиля, по которой упомянутый автомобиль автоматически паркуется,
причём под упомянутыми датчиками подразумевается множество датчиков изображения и множество радиолокационных датчиков, а упомянутый автомобиль оснащен электронным блоком управления и, прежде чем графические и радиолокационные данные собираются упомянутыми датчиками вокруг упомянутого автомобиля в условиях, когда упомянутый автомобиль движется со скоростью, значение которой находится в пределах заданного интервала, причем время, в течение которого автомобиль движется со скоростью, значение которой находится в пределах заданного интервала, больше или равно заданному времени, данный способ также характеризуется следующим:
при запуске упомянутого автомобиля определяется рабочее состояние упомянутых датчиков изображения, радиолокационных датчиков и электронного блока управления, причем различаются исправное и аварийное состояния;
на основе упомянутых рабочих состояний определяется функциональная категория упомянутого автомобиля, причём функциональная категория упомянутого автомобиля может быть любой из четырех (категория нормального функционирования, аварийная категория первой степени, аварийная категория второй степени и аварийная категория третьей степени), а упомянутый этап определения функциональной категории упомянутого автомобиля на основе упомянутых рабочих состояний характеризуется следующим:
если рабочее состояние упомянутых датчиков изображения, радиолокационных датчиков и электронного блока управления является исправным, то упомянутая функциональная категория автомобиля определяется как упомянутая категория нормального функционирования;
если рабочее состояние по меньшей мере одного из упомянутых радиолокационных датчиков и/или электронного блока управления является аварийным, то упомянутая функциональная категория автомобиля определяется как упомянутая аварийная категория первой степени;
если рабочее состояние всех упомянутых датчиков изображения является аварийным, то упомянутая функциональная категория автомобиля определяется как упомянутая аварийная категория второй степени;
если рабочее состояние некоторых из упомянутых датчиков изображения является аварийным, то упомянутая функциональная категория автомобиля определяется как упомянутая аварийная категория третьей степени.
2. Способ по п. 1, отличающийся тем, что упомянутый электронный блок управления используется для управления процессом автоматической парковки упомянутого автомобиля, а после того как выполнен этап определения функциональной категории упомянутого автомобиля на основе упомянутых рабочих состояний:
если функциональная категория упомянутого автомобиля определена как упомянутая аварийная категория первой степени, то система подает команду о прекращении функционирования упомянутого электронного блока управления;
если функциональная категория упомянутого автомобиля определена как упомянутая аварийная категория второй степени, то система подает команду о прекращении функционирования упомянутых датчиков изображения;
если функциональная категория упомянутого автомобиля определена как упомянутая аварийная категория третьей степени, то система подает команду о прекращении функционирования тех датчиков изображения, упомянутое рабочее состояние которых определено как упомянутое аварийное состояние.
3. Способ по п. 1, отличающийся тем, что информация об упомянутом парковочном месте включает в себя один или несколько из следующих типов информации: информация о наличии в парковочном месте дорожных конусов, информация о наличии в парковочном месте знаков, запрещающих парковку, информация о наличии в парковочном месте парковочного барьера, информация о наличии в парковочном месте разметок и информация о наличии в парковочном месте преград.
4. Способ по п. 1, отличающийся тем, что этап, на котором упомянутые графические и радиолокационные данные вводятся в заданную модель сверточной нейронной сети для получения на выходе упомянутой модели сверточной нейронной сети информации об, по меньшей мере, одном парковочном месте, включает в себя следующие шаги:
определение упомянутой моделью сверточной нейронной сети упомянутой информации о парковочном месте, в том числе о его категории, на основе введенных в упомянутую модель сверточной нейронной сети упомянутых графических и радиолокационных данных;
получение на выходе упомянутой модели сверточной нейронной сети упомянутой информации о парковочном месте, в том числе информация о категории парковочного места.
5. Способ по п. 4, отличающийся тем, что, после того как выполнен этап, на котором упомянутой моделью сверточной нейронной сети на основе введенных в нее упомянутых графических и радиолокационных данных определяется информация о парковочном месте, в том числе о его категории:
если упомянутое парковочное место является угловым, то упомянутая модель сверточной нейронной сети определяет для упомянутого углового парковочного места направление парковки на основе упомянутых графических и радиолокационных данных;
упомянутая информация о парковочном месте, получаемая на выходе упомянутой модели сверточной нейронной сети, включает в себя, в том числе, и информацию о направлении парковки для упомянутого углового парковочного места.
6. Способ по п. 1, отличающийся тем, что этап, на котором информация о конечном месте парковки выбирается из общего потока информации об, по меньшей мере, одном упомянутом парковочном месте в соответствии с поступившей командой о выборе места для парковки, если текущая передача, на которой движется упомянутый автомобиль, является передней или холостой, включает в себя следующие шаги:
если в момент поступления сигнала о поиске парковочного места текущая передача, на которой движется упомянутый автомобиль, является упомянутой передней или упомянутой холостой передачей, то отображается интерфейс управления парковкой, содержащий информацию об, по меньшей мере, одном упомянутом парковочном месте;
при поступлении команды о выборе места для парковки, соответствующей упомянутому интерфейсу управления парковкой, из общего потока информации об, по меньшей мере, одном упомянутом парковочном месте в соответствии с поступившей командой о выборе места для парковки выбирается информация о конечном месте парковки.
7. Способ по п. 1, отличающийся тем, что, после того как выполнен этап, на котором на основе упомянутой информации о конечном месте парковки происходит генерация траектории для парковки автомобиля, по которой упомянутый автомобиль автоматически паркуется:
если в момент поступления сигнала о поиске парковочного места текущая передача упомянутого автомобиля является парковочной, то с помощью упомянутых датчиков собираются упомянутые данные об окружающей обстановке вокруг упомянутого автомобиля;
на основе упомянутых данных об окружающей обстановке определяется по меньшей мере одно направление выезда упомянутого автомобиля с места парковки;
отображается интерфейс управления выездом автомобиля с места парковки, в котором указано по меньшей мере одно из упомянутых направлений выезда с парковки;
при поступлении команды о выезде с места парковки на ее основе выбирается из упомянутых направлений выезда конечное направление;
на основе упомянутой информации о конечном направлении выезда с парковки происходит генерация траектории для выезда автомобиля с места парковки, по которой упомянутый автомобиль автоматически выедет с места парковки.
8. Способ по п. 1, отличающийся тем, что, после того как выполнен этап, на котором на основе упомянутой информации о конечном месте парковки происходит генерация траектории для парковки автомобиля, по которой упомянутый автомобиль автоматически паркуется:
в случае если выявляется аномальное состояние упомянутого автомобиля, система подает команду о временном прекращении процесса автоматического паркинга;
в случае подтверждения того, что упомянутое аномальное состояние упомянутого автомобиля устранено, система подает команду о продолжении процесса автоматического паркинга.
9. Способ по п. 8, отличающийся тем, что автомобиль считается находящимся в упомянутом аномальном состоянии, если имеет место по меньшей мере одно из нижеследующих обстоятельств:
упомянутый автомобиль находится в том состоянии, когда водитель не пристегнут ремнем безопасности;
упомянутый автомобиль находится в том состоянии, когда его двери не закрыты;
на траектории для парковки упомянутого автомобиля появляется преграда.
10. Устройство для реализации способа контроля системой автоматизированного паркинга, отличающееся тем, что включает в себя:
первый модуль сбора данных, используемый для сбора с помощью упомянутых датчиков графических и радиолокационных данных вокруг упомянутого автомобиля, движущегося со скоростью, значение которой находится в пределах заданного интервала, причем время, в течение которого автомобиль движется со скоростью, значение которой находится в пределах заданного интервала, больше или равно заданному времени;
модуль нейронной сети, используемый для ввода упомянутых графических и упомянутых радиолокационных данных в заданную модель сверточной нейронной сети и получения на выходе упомянутой модели сверточной нейронной сети информации об, по меньшей мере, одном парковочном месте, причем обучение упомянутой модели сверточной нейронной сети осуществляется на основе обучающих графических и радиолокационных данных, собранных с большого количества парковочных мест различных типов;
модуль выбора действия «Парковаться», используемый для выбора информации о конечном месте парковки из общего потока информации об, по меньшей мере, одном упомянутом парковочном месте в соответствии с поступившей командой о выборе места для парковки, если текущая передача, на которой движется упомянутый автомобиль, является передней или холостой;
модуль выбора траектории, используемый для генерации траектории для парковки автомобиля, по которой упомянутый автомобиль автоматически паркуется, на основе упомянутой информации о конечном месте парковки;
модуль измерения, используемый для определения рабочих состояний упомянутых датчиков изображения, радиолокационных датчиков и электронного блока управления при запуске упомянутого автомобиля, причем различаются исправное и аварийное состояния;
модуль определения функциональной категории, используемый для определения функциональной категории упомянутого автомобиля на основе упомянутых рабочих состояний,
причём упомянутый модуль определения функциональной категории включает в себя:
первый подмодуль подтверждения, используемый для подтверждения того, что функциональная категория упомянутого автомобиля определена как упомянутая категория нормального функционирования, если рабочее состояние упомянутых датчиков изображения, радиолокационных датчиков и электронного блока управления является исправным;
второй подмодуль подтверждения, используемый для подтверждения того, что функциональная категория упомянутого автомобиля определена как упомянутая аварийная категория первой степени, если рабочее состояние по меньшего мере одного из упомянутых радиолокационных датчиков и/или электронного блока управления является аварийным;
третий подмодуль подтверждения, используемый для подтверждения того, что функциональная категория упомянутого автомобиля определена как упомянутая аварийная категория второй степени, если рабочее состояние всех упомянутых датчиков изображения является аварийным;
четвертый подмодуль подтверждения, используемый для подтверждения того, что функциональная категория упомянутого автомобиля определена как упомянутая аварийная категория третьей степени, если рабочее состояние некоторых из упомянутых датчиков изображения является аварийным.
11. Устройство по п. 10, отличающееся тем, что включает в себя:
первый контрольный модуль, роль которого заключается в подаче команды о прекращении функционирования упомянутого электронного блока управления в случае, если функциональная категория упомянутого автомобиля определена как упомянутая аварийная категория первой степени;
второй контрольный модуль, роль которого заключается в подаче команды о прекращении функционирования упомянутых датчиков изображения в случае, если функциональная категория упомянутого автомобиля определена как упомянутая аварийная категория второй степени;
третий контрольный модуль, роль которого заключается в подаче команды о прекращении функционирования тех датчиков изображения, упомянутое рабочее состояние которых определено как упомянутое аварийное состояние, в случае, если функциональная категория упомянутого автомобиля определена как упомянутая аварийная категория третьей степени.
12. Устройства по п. 10, отличающиеся тем, что включают в себя, помимо прочего:
второй модуль сбора данных, используемый для сбора упомянутых данных об окружающей обстановке вокруг упомянутого автомобиля с помощью упомянутых датчиков, если в момент поступления сигнала о поиске парковочного места текущая передача упомянутого автомобиля является парковочной;
модуль подтверждения, используемый для подтверждения по меньшей мере одного направления выезда упомянутого автомобиля с места парковки на основе данных об окружающей обстановке;
модуль отображения, используемый для отображения интерфейса управления выездом автомобиля с места парковки, содержащего по меньшей мере одно из упомянутых направлений выезда;
модуль выбора действия «Выехать с места парковки», используемый для выбора из упомянутых направлений выезда с места парковки конечного направления выезда в соответствии с поступившей командой о выезде с места парковки;
модуль определения траектории выезда с места парковки, используемый для генерации траектории для выезда автомобиля с места парковки, по которой упомянутый автомобиль на основе упомянутой информации о конечном направлении выезда автоматически выедет с парковочного места.
13. Вычислительно-обрабатывающее оборудование, отличающееся тем, что включает в себя:
запоминающее устройство, в котором хранятся машинно-считываемые коды;
один или несколько процессоров, во время обработки машинно-считываемых кодов которым или которыми вычислительно-обрабатывающим оборудованием реализуется способ контроля системой автоматизированного паркинга, упомянутый в любом из пп. 1-9.
14. Машинно-считываемая среда, в которой хранится компьютерная программа, содержащая машинно-считываемые коды и обеспечивающая реализацию вычислительно-обрабатывающим оборудованием способа контроля системой автоматизированного паркинга, упомянутого в любом из пп. 1-9, когда машинно-считываемые коды обрабатываются упомянутым вычислительно-обрабатывающим оборудованием.
| US 2017355307 A1, 14.12.2017 | |||
| CN 108875911 A, 23.11.2018 | |||
| CN 108860139 A, 23.11.2018 | |||
| CN 109808682 A, 28.05.2019 | |||
| Устройство для автоматического поддержания колебательного движения часовой системы баланс - спираль | 1950 |
|
SU97312A1 |

