Содержание притязаний на право приоритета в отношении изобретения под наименованием «Способ автоматической парковки, а также устройства и системы для его реализации», заявка на которое подана в Патентное ведомство КНР 29 ноября 2019 года под номером 201911206064.6, приведено в настоящей патентной заявке в полном объеме посредством цитирования.
Техническая область
Настоящее изобретение касается области автомобилестроения, в частности, способа автоматической парковки, а также устройств и систем для его реализации.
Предыдущий уровень техники
С повышением общего уровня жизни населения автомобили стали необходимым средством передвижения, однако ввиду ограниченности парковочных пространств поиск подходящего места для парковки среди ограниченных парковочных мест и успешное припаркование автомобилей остаются насущными проблемами, с которыми водители по-прежнему сталкиваются постоянно. В этой связи стремительное развитие получили технологии автоматической парковки автомобилей.
Имеющиеся на сегодня технологии автоматической парковки характеризуются тем, что после соединения мобильного устройства и контроллера системы автоматизированного паркинга, установленного в автомобиле, во время выполнения автоматической парковки оперативные данные, вводимые водителем в мобильном устройстве, такие как, например, данные о координатах места на экране мобильного телефона, в котором водитель произвел нажатие, непрерывно поступают через канал связи в упомянутый контроллер, который подвергает эти оперативные данные расчетам и анализу с тем, чтобы на их основе определять намерения водителя и подавать соответствующим системам в автомобиле сигналы о продолжении или прекращении процесса парковки, а данные системы на основе получаемых сигналов выполняют те или иные действия, чтобы выполнить или не выполнить парковку.
Однако, поскольку в существующих технических решениях определение намерений водителя производится посредством контроллера системы автоматизированного паркинга, установленного в автомобиле, такому контроллеру приходится непрерывно через канал связи принимать от мобильного устройства оперативные данные, вводимые в мобильном устройстве водителем, а, поскольку такие оперативные данные имеют сравнительно большой объем, то они занимают довольно много коммуникационных ресурсов, что приводит к снижению эффективности процесса автоматической парковки. Кроме того, такая ситуация неблагоприятна для расширения функций, при выполнении которых используются коммуникационные данные и ресурсы, а часть ресурсов контроллера системы автоматизированного паркинга становится занятой.
Содержание изобретения
Принимая во внимание вышесказанное, целью настоящего изобретения является представление нового способа автоматической парковки, а также устройств и систем для его реализации, которые позволят устранить недостатки, имеющиеся в существующих технологиях из-за того, что оперативные данные, вводимые пользователем в мобильное устройство и отправляемые данным устройством непосредственно контроллеру системы автоматизированного паркинга, установленному в автомобиле, для выполнения автоматической парковки, имеют сравнительно большой объем, что приводит к снижению эффективности самого процесса паркинга.
Для того, чтобы достичь вышеизложенной цели, техническое решение, являющееся объектом настоящего раскрытия, реализуется следующим образом:
Способ автоматической парковки, применимый к мобильным устройствам и включающий в себя:
Прием введенной пользователем оперативной информации при поступлении команды о начале выполнения автоматической парковки;
Генерацию команды на управление процессом парковки на основе упомянутой оперативной информации;
Отправку упомянутой команды на управление процессом парковки в автомобиль для выполнения упомянутым автомобилем операций, связанных с автоматической парковкой, в соответствии с упомянутой командой на управление процессом парковки.
Способ автоматической парковки, применимый к автомобилям, оборудованным контроллерами системы автоматизированного паркинга, и включающий в себя:
Прием вводимых пользователем заданных операций посредством упомянутого контроллера системы автоматизированного паркинга;
Получение информации о передаче, на которой движется упомянутый автомобиль;
Генерацию команды о начале автоматической парковки на основе упомянутой информации о заданных операциях и упомянутой информации о передаче и отправку такой команды в мобильное устройство для того, чтобы мобильное устройство, получив команду о начале автоматической парковки и оперативную информацию, введенную пользователем, на основе данной информации сгенерировало команду на управление процессом парковки и отправило такую команду в автомобиль;
Получение от упомянутого мобильного устройства команды на управление процессом парковки и выполнение в соответствии с такой командой операций, связанных с автоматической парковкой.
Устройство для реализации способа автоматической парковки, применимое к мобильным устройствам и включающее в себя:
Первый модуль приема, предназначенный для приема вводимой пользователем оперативной информации при поступлении команды о начале автоматической парковки;
Первый модуль генерации, предназначенный для генерации команды на управление процессом парковки на основе упомянутой оперативной информации;
Первый модуль отправки, предназначенный для отправки в автомобиль упомянутой команды на управление процессом парковки для того, чтобы упомянутый автомобиль мог выполнить автоматическую парковку по такой команде.
Устройство для реализации способа автоматической парковки, применимое к автомобилям, оборудованным контроллерами системы автоматизированного паркинга, и включающее в себя:
Третий модуль приема, предназначенный для приема вводимых пользователем заданных операций посредством упомянутого контроллера системы автоматизированного паркинга;
Модуль получения информации, предназначенный для получения информации о передаче, на которой движется упомянутый автомобиль;
Второй модуль отправки, предназначенный для генерации команды о начале автоматической парковки на основе упомянутой информации о заданных операциях и упомянутой информации о передаче и отправки такой команды в мобильное устройство для того, чтобы мобильное устройство, получив команду о начале автоматической парковки и оперативную информацию, введенную пользователем, на основе данной информации сгенерировало команду на управление процессом парковки и отправило такую команду в автомобиль;
Четвертый модуль приема, предназначенный для получения от упомянутого мобильного устройства команды на управление процессом парковки и выполнения в соответствии с такой командой операций, связанных с автоматической парковкой.
Система автоматизированного паркинга, включающая в себя мобильное устройство и автомобиль, оборудованный контроллером системы автоматизированного паркинга, и отличающаяся тем, что между упомянутым мобильным устройством и упомянутым автомобилем установлена связь;
Упомянутый автомобиль посредством упомянутого контроллера системы автоматизированного паркинга получает вводимую пользователем информацию о заданных операциях;
Упомянутый автомобиль получает информацию о передаче, на которой он движется, и на основе упомянутой информации о заданных операциях и упомянутой информации о передаче генерирует команду о начале автоматической парковки, затем отправляет данную команду к мобильное устройство;
Упомянутое мобильное устройство, получив команду о начале автоматической парковки и оперативную информацию, введенную пользователем, на основе данной информации генерирует команду на управление процессом парковки и отправляет такую команду в автомобиль;
Упомянутый автомобиль на основе команды на управление процессом парковки выполняет операции, связанные с автоматической парковкой.
По сравнению с существующими на сегодня технологиями способ автоматической парковки, а также устройства и системы для его реализации, представляемые настоящим раскрытием, обладают нижеследующими преимуществами:
Способ автоматической парковки, а также устройства и системы для его реализации, представляемые в примере реализации настоящего раскрытия, включают в себя: прием введенной пользователем оперативной информации при поступлении команды о начале выполнения автоматической парковки; генерацию команды на управление процессом парковки на основе оперативной информации; отправку команды на управление процессом парковки в автомобиль для выполнения автомобилем операций, связанных с автоматической парковкой, в соответствии с командой на управление процессом парковки. Настоящим раскрытием предусмотрена возможность преобразования мобильным устройством во время управления процессом автоматической парковки автомобиля введенной пользователем в мобильное устройство оперативной информации с достаточно большим объемом данных в команду на управление процессом парковки с маленьким объемом данных, которая впоследствии подается только в контроллер системы автоматизированного паркинга в автомобиле с тем, чтобы автомобиль мог выполнить автоматическую парковку. Такая возможность позволяет, с одной стороны, снижать информационную нагрузку на канал связи между мобильным устройством и автомобилем в процессе автоматической парковки, повышать эффективность самого процесса парковки и одновременно с этим расширять функции, при выполнении которых используются коммуникационные данные и ресурсы, а с другой стороны, сокращать объем расчетов, производимых контроллером системы автоматизированного паркинга, кроме того, такая возможность позволяет поддерживать способы ввода пользователем самоопределяемой оперативной информации и повышать комфортность пользователя во время реализации предлагаемого способа.
Вышеизложенное является лишь кратким обзором технических решений, предлагаемых настоящим раскрытием. Для того, чтобы более широко раскрыть сущность технических способов, представленных настоящим раскрытием, и в соответствии с инструкцией претворить его в жизнь, а также дать пояснения и сделать более понятными характерные особенности, преимущества и одну из вышеперечисленных и прочих целей настоящего раскрытия, ниже приводится конкретный пример его реализации.
Пояснения к иллюстрациям
Для того, чтобы внести ясность в технические решения, предлагаемые примером реализации настоящего раскрытия или существующими технологиями, ниже дается краткая информация об иллюстрациях, используемых для описания примера реализации данного раскрытия или существующих технологий, причем, очевидно, что нижеописанные иллюстрации относятся к примеру реализации настоящего раскрытия и могут послужить основой для получения рядовыми техническими работниками данной области других иллюстраций без созидательного труда.
Иллюстрации, составляющие часть настоящего раскрытия, используются для облегчения понимая сути представленного в заявке раскрытия, а иллюстрированный пример реализации и текстовые пояснения к нему служат для интерпретации настоящего раскрытия и не устанавливают ненужных ограничений в его отношении. Далее даются пояснения к прилагаемым иллюстрациям:
На Фиг. 1 представлена технологическая схема способа автоматической парковки, упомянутого в примере реализации настоящего раскрытия;
На Фиг. 2 представлен упрощенный структурный чертеж системы автоматизированного паркинга, упомянутой в примере реализации настоящего раскрытия;
На Фиг. 3 представлен интерфейс отображения и управления выездом автомобиля с места парковки на мобильном устройстве, упомянутый в примере реализации настоящего раскрытия;
На Фиг. 4 представлена технологическая схема другого способа автоматической парковки, упомянутого в примере реализации настоящего раскрытия;
На Фиг. 5 представлена технологическая схема взаимодействия по способу автоматической парковки, упомянутому в примере реализации настоящего раскрытия;
На Фиг. 6 представлен интерфейс отображения эффективной информации о парковочных местах, упомянутый в примере реализации настоящего раскрытия;
На Фиг. 7 представлен интерфейс мобильного приложения, упомянутый в примере реализации настоящего раскрытия;
На Фиг. 8 представлен интерфейс другого мобильного приложения, упомянутый в примере реализации настоящего раскрытия;
На Фиг. 9 представлен интерфейс другого мобильного приложения, упомянутый в примере реализации настоящего раскрытия;
На Фиг. 10 представлен интерфейс другого мобильного приложения, упомянутый в примере реализации настоящего раскрытия;
На Фиг. 11 представлен интерфейс другого мобильного приложения, упомянутый в примере реализации настоящего раскрытия;
На Фиг. 12 представлена технологическая схема взаимодействия по другому способу автоматической парковки с дистанционным управлением, упомянутому в примере реализации настоящего раскрытия;
На Фиг. 13 представлена схема выполнения операций по способу автоматической парковки с дистанционным управлением, упомянутому в примере реализации настоящего раскрытия;
На Фиг. 14 представлен чертеж конструкции устройства для реализации способа автоматической парковки, упомянутого в примере реализации настоящего раскрытия;
На Фиг. 15 представлен чертеж конструкции другого устройства для реализации способа автоматической парковки, упомянутого в примере реализации настоящего раскрытия;
На Фиг. 16 схематически изображена структура вычислительно-обрабатывающего оборудования, используемого для реализации способа, представляемого в настоящем раскрытии; и
На Фиг. 17 схематически изображен модуль памяти, используемый для хранения или переноса программных кодов, необходимых для реализации представляемого настоящим раскрытием способа.
Конкретный пример реализации изобретения
В целях раскрытия сущности вышеперечисленных задач, технических решений и преимуществ настоящего раскрытия далее дается полное и детальное описание технических решений, применимых в примере реализации изобретения, с использованием иллюстраций в виде чертежей. Однако приведенный ниже пример реализации раскрытия охватывает лишь часть, а не всю сферу его применения. Все прочие способы реализации раскрытия, получаемые рядовыми техническими работниками данной области на основе приведенного в настоящей заявке примера без созидательного труда, являются объектами патентных прав и подлежат охране в рамках настоящей заявки.
Следует отметить, что при отсутствии противоречий пример реализации раскрытия, представленный в настоящей заявке, и его характерные особенности могут быть взаимно комбинированы.
Ниже на примере реализации с иллюстрациями в виде прилагаемых чертежей дается детальное описание настоящего раскрытия.
На Фиг. 1 представлена технологическая схема способа автоматической парковки, упомянутого в примере реализации настоящего раскрытия.
Способ автоматической парковки, представляемый примером реализации настоящего раскрытия и применимый к мобильным устройствам.
Шаг 101: прием введенной пользователем оперативной информации при поступлении команды о начале выполнения автоматической парковки.
На данном шаге предусмотрена возможность приема вводимой пользователем в мобильном устройстве оперативной информации, если мобильное устройство получает команду о начале выполнения автоматической парковки.
К упомянутой команде о начале выполнения автоматической парковки может отнестись любой из следующих типов команд: команда о начале автоматического въезда в парковочное место и команда о начале автоматического выезда с парковочного места. Если упомянутой командой о начале выполнения автоматической парковки является команда о начале автоматического въезда в парковочное место, то мобильное устройство начинает принимать оперативную информацию, которую пользователь в него вводит, причем такой оперативной информацией является информация о действиях пользователя относительно автоматически паркующегося автомобиля. Если же упомянутой командой о начале выполнения автоматической парковки является команда о начале автоматического выезда с парковочного места, то мобильное устройство начинает принимать оперативную информацию, которую пользователь в него вводит, причем такой оперативной информацией является информация о действиях пользователя относительно автоматически выезжающего с места парковки автомобиля.
Говоря конкретно, на Фиг. 2 представлен упрощенный структурный чертеж системы автоматизированного паркинга, упомянутой в примере реализации настоящего раскрытия. Как видно на чертеже, команда о начале выполнения автоматической парковки может быть сгенерирована контроллером системы автоматизированного паркинга (Auto Parking Assist Electronic Control Unit, APA ECU) 50, установленным в автомобиле, после приема введенных пользователем заданных операций и получения информации о передаче, на которой движется автомобиль. Сгенерированная команда о начале выполнения автоматической парковки подается контроллером APA ECU 50 в мобильное устройство, которым может быть мобильный телефон с программным обеспечением (Application, APP) 10 для управления автоматической парковкой, а мобильное устройство, получив команду о начале выполнения автоматической парковки, начинает принимать оперативную информацию, вводимую пользователем для выполнения автоматической парковки. Мобильное приложение 10 используется для оценки полученной от пользователя оперативной информации и передачи результата такой оценки, т.е. команды на управление процессом парковки, в контроллер APA ECU 50, а также для отображения текущей информации о парковке автомобиля.
Согласно данному примеру реализации настоящего раскрытия, на приборной панели или мультимедийном мониторе автомобиля могут быть установлены вспомогательные выключатели или кнопки управления автоматической парковкой. Упомянутые ранее предварительно заданные операции, вводимые пользователем, могут быть либо операции, для выполнения которых пользователь нажимает вспомогательные выключатели или кнопки управления автоматической парковкой в случае, если он желает совершить автоматическую парковку своего автомобиля, либо вводимые пользователем посредством модуля сбора голосовых данных операции по подаче голосовой команды о начале процесса автоматической парковки. Далее, APA ECU 50 может посредством сетевой структуры всего автомобиля получать информацию о том, выполняет ли пользователь вышеупомянутые предварительно заданные операции.
Одновременно с этим, после получения введенных пользователем заданных операций, о чем ранее шла речь, APA ECU 50 может также посредством сетевой структуры всего автомобиля получить из блока управления коробкой передач (Transmission Control Unit, TCU) 90 информацию о передаче, на которой движется автомобиль. Если в данный момент автомобиль движется на передней или холостой передаче, то APA ECU 50 генерирует команду о начале автоматической парковки.
Говоря конкретнее, в мобильном приложении 10 может быть установлена опция автоматического выезда с места парковки. В данной связи команда о начале выезда с места парковки может быть вместе с информацией о выборе пользователя подана мобильным приложением 10 в APA ECU 50 после того, как пользователем, намеревающимся выехать с места парковки, в мобильном приложении 10 выбрана функция автоматического выезда с места парковки. Также на приборной панели автомобиля могут быть установлены вспомогательные выключатели или кнопки управления автоматическим выездом с места парковки, которые пользователь может нажать, если он желает совершить автоматический выезд с места парковки, в таком случае APA ECU 50 может посредством сетевой структуры всего автомобиля получить информацию о том, совершены ли пользователем вышеперечисленные действия. Далее, APA ECU 50, получив оперативную информацию, содержащую информацию о намерении пользователя совершить автоматический выезд с места парковки, в первую очередь, запускает процесс самопроверки автомобиля и, если не обнаруживаются какие-либо ошибки в системе APA ECU 50 и связанных системах автомобиля, то принимает от автомобильного датчика (SENSOR) 60 информацию об окружающей обстановке вокруг автомобиля. Упомянутый SENSOR 60 может включать в себя радиолокационный датчик, служащий для выявления вокруг автомобиля преград, и автомобильную камеру, служащую для проверки обстановки вокруг автомобиля. На основе информации об окружающей обстановке генерируется информация о возможных направлениях выезда автомобиля с места парковки для дальнейшей отправки в мобильное приложение 10, которое, получив данную информацию о возможных направлениях выезда автомобиля с места парковки, отображает ее в своем интерфейсе. На Фиг. 3 представлен интерфейс отображения и управления выездом автомобиля с места парковки на мобильном устройстве, представленный в примере реализации настоящего раскрытия. В упомянутой информации о возможных направлениях выезда автомобиля с места парковки содержится информация о множестве направлений, в которых автомобиль может успешно выехать с места парковки и которые получены APA ECU 50 путем произведенных на основе информации об окружающей обстановке вокруг автомобиля на текущий момент расчетов. Мобильное приложение 10, получив оперативную информацию о выборе пользователем на экране информации о том или ином возможном направлении выезда, генерирует конечное направление выезда с места парковки и команду о начале автоматического выезда автомобиля в места парковки и одновременно с этим принимает оперативную информацию, вводимую пользователем в отношении процесса автоматического выезда автомобиля с места парковки.
Следует отметить, что по каналу связи между упомянутым мобильным устройством и автомобилем можно передавать информацию от одного к другому и обратно, а информацию между APA ECU в автомобиле и его связанными системами можно передавать через сетевую структуру всего автомобиля.
Согласно примеру реализации настоящего раскрытия, как показано на Фиг. 2, мобильное устройство 3 и автомобиль 40 могут быть посредством Блютуз соединены для передачи информации. Говоря конкретнее, мобильное устройство 30 может включать в себя мобильное приложение 10 и набор средств для разработки ПО (Software Development Kit, SDK) 20, составляющий вместе с Блютуз-модулем для автомобиля 160 конструкцию Блютуз-ключа, предоставляющего интерфейс для информационного взаимодействия между мобильным приложением 10 и Блютуз-модулем 160 и обеспечивающего безопасное шифрование обмениваемых данных. Поскольку в автомобиле 40 установлен Блютуз-модуль 160, то процесс передачи информации между мобильным устройством и автомобилем протекает следующим образом: мобильное устройство 10 посредством SDK 20 передает информацию, которую требуется передать, в Блютуз-модуль 160, установленный в автомобиле 40; Блютуз-модуль 160 посредством сетевой структуры всего автомобиля передает данную информацию в APA ECU 50, а, поскольку и APA ECU 50, и все связанные системы автомобиля могут осуществлять передачу информацию посредством сетевой структуры всего автомобиля, то возможно осуществление двухстороннего обмена данными между мобильным приложением 10 и связанными системами автомобиля.
К связанным системам в автомобиле, о чем упомянуто в данном примере реализации настоящего раскрытия, могут отнестись:
1) Система электронного контроля устойчивости кузова (Electronic Stability Program, ESP) 70, предназначенная для сообщения данных о дистанции движения автомобиля и приведение в действие тормоза;
2) Система электрического усилителя руля (Electric Power Steering, EPS) 80, предназначенная для приведения в действие руля и сообщения данных об угле его поворота;
3) Блок управления коробкой передач (Transmission Control Unit, TCU) 90, предназначенный для сообщения данных о текущей передаче и переключения передач на конечные;
4) Датчик ремня безопасности 100 и датчик присутствия человека в водительском сиденьи 110, предназначенные для сообщения данных о текущем состоянии водителя в автомобиле и предоставления информации, необходимой для установления намерений водителя.
5) Модуль контроля кузова (Body Control Module, BCM) 120, предназначенный для сообщения данных о состоянии дверей автомобиля и контроля автомобильных дверных замков и взаимодействующий с системой PEPS;
6) Система пассивного доступа и пассивного пуска (Passive Entrance Passive Start, PEPS) 130, предназначенная для контроля переключений в системе питания, зажигания и запуска двигателя, контроля противоугонной системы, а также приема и приведения в исполнение команд ключа.
7) Электронный блок управления (Electronic Control Unit, ECU), предназначенный для сообщения данных о состоянии двигателя и глушения двигателя и взаимодействующий с системой PEPS.
Следует отметить, что в APA ECU 50 имеется алгоритм распознавания изображений, используемый для приведения в действие SENSOR 60, а также сортировки и вычислительной обработки собираемой им информации с целью определить информацию об окружающей обстановке вокруг автомобиля 40. Такой алгоритм также используется для определения и выполнения логических операций системы, в том числе подтверждение информации TCU 90 о передаче и вывод информации о конечной передаче, определение информации EPS 80 об угле поворота переднего колеса и вывод информации и команды с конечным углом поворота; вычислительная обработка выводимой ESP 70 информации о частоте импульса и скорости вращения колес с последующим вычислением разницы между расстоянием движения автомобиля 40 и конечным значением данного параметра, причем, если расстояние движения автомобиля 40 совпадает с конечным значением, то в ESP 70 подается запрос торможения; сбор выводимой PEPS 120 информации о режиме работы системы питания автомобиля и отправленной ECU 140 информации о состоянии двигателя, а также подача в соответствии с собранной информацией о режиме работы системы питания автомобиля и состоянии двигателя команды с конечным режимом и информацией о состоянии; сбор выводимой BCM 120 информации о состоянии дверей автомобиля и т.д. и подача команды на разблокировку; сбор соответствующей информации от датчика ремня безопасности 100 и датчика присутствия человека в водительском сиденьи 110 как информации, которая послужит основой для определения выполняемых функций; сохранение и запоминание информации об обучаемых траекториях.
Шаг 102: генерация команды на управление процессом парковки на основе упомянутой оперативной информации.
На данном шаге предумотрена возможность приема мобильным устройством оперативной информации о выборе пользователя относительно процесса автоматической парковки после получения им команды о начале автоматической парковки, возможность распозванания мобильным устройством намерений пользователя на основе упомянутой оперативной информации в соответствии с заданными правилами и преобразования им введенной пользователем оперативной информации в команду на управление процессом парковки.
Опционально, к упомянутой оперативной информации относится любой из следующих типов информации: информация о жестах пользователя по экрану мобильного устройства, информация о нажатиях клавиш, информация о голосовом управлении и оперативная информация о тряске пользователем упомянутого мобильного устройства.
Опционально, в упомянутом мобильном устройстве предварительно настроены меню выбора упомянутой оперативной информации и соответствующие упомянутой оперативной информации траектории выполнения заданных операций, при этом в упомянутом меню имеются следующие опции: опция жестов, опция нажатий клавиш, опция голосового управления и опция управления тряской. Путем выбора требуемой опции пользователь может самостоятельно выбрать ту оперативную информацию, которую нужно ввести в мобильное устройство во время совершения автоматической парковки, кроме того, пользователь также может на свое усмотрение настраивать траектории выполнения заданных операций, соответствующие упомянутой оперативной информации, т.е. поддверживаются способы ввода пользователем самоопределяемой оперативной информации.
Согласно примеру реализации настоящего раскрытия, после запуска пользователем процесса автоматической парковки мобильному устройству необходимо получить от пользователя оперативную информацию, чтобы по ней определить, ведет ли пользователь постоянный контроль за процессом автоматической парковки, и получить информацию о том, вмешивается ли пользователь в данный процесс, и соответствующие команды.
Например, если оперативной информацией является информация о жестах, совершаемых пользователем по экрану мобильного устройства, то мобильное устройство может путем определения координат места, в котором происходит контакт пальцев пользователя с экраном мобильного устройства, и измерения контактного давления в этом месте получать информацию о жестах, совершаемых пользователем по экрану мобильного устройства, затем в соответствии с определенными, предварительно заданными правилами определять намерения пользователя, соответствующие упомянутой информации о жестах, генерировать команды на управление процессом парковки, выражающие намерения пользователя, и отправлять такие команды в автомобиль.
Согласно примеру реализации настоящего раскрытия, в упомянутых установленных правилах учитываются отношения между информацией о жестах и упомянутой командой на управление процессом автоматической парковки, которой может быть либо команда на продолжение автоматической парковки, либо команда на прерывание автоматической парковки. Если поступающая в автомобиль команда на управление процессом парковки является командой на продолжение автоматической парковки, то это означает, что мобильным устройством выявлены непрерывно вводимые пользователем на своем экране операции с жестами, идентичными заданным траекториям выполнения операций, т.е. пользователь в данный момент непрерывно следит за процессом автоматической парковки, причем во время совершения автоматической парковки им не обнаружено в автомобиле никаких аварийных факторов, таких как, например, появление на траектории парковки автомобиля преград, способных воспрепятствовать процессу парковки, и в данной связи пользователь желает продолжить автоматически парковаться. Если же поступающая в автомобиль команда на управление процессом парковки является командой на прерывание автоматической парковки, то это означает, что мобильным устройством выявлено отсутствие непрерывно вводимых пользователем на своем экране операций с жестами, идентичными заданным траекториям выполнения операций, т.е. в данный момент пользователь по той или иной причине не ведет постоянного наблюдения за процессом автоматической парковки или во время совершения автоматической парковки им обнаружены в автомобиле аварийные факторы, такие как, например, появление на траектории парковки автомобиля преград, способных воспрепятствовать процессу парковки, и в данной связи пользователь желает прервать процесс автоматической парковки.
Шаг 103: отправка упомянутой команды на управление процессом парковки в автомобиль для выполнения упомянутым автомобилем операций, связанных с автоматической парковкой, в соответствии с упомянутой командой на управление процессом парковки.
На данном шаге предусмотрена возможность отправки мобильным устройством сгенерированной на шаге 102 команды на управление процессом парковки в автомобиль для того, чтобы система APA ECU автомобиля могла непосредственно на основе такой команды определять все команды, которые должны выполнить связанные системы автомобиля во время автоматической парковки, и отправлять упомянутые команды во все связанные системы, соответственно, для того, чтобы каждая из связанных систем могла выполнять полученные команды, пока автомобилем не будет полностью выполнен процесс автоматической парковки.
Говоря конкретнее, мобильное приложение может посредством Блютуз-ключа SDK для мобильного телефона подавать команду на управление процессом парковки в Блютуз-модуль, установленный в автомобиле, а Блютуз-модуль посредством сетевой структуры всего автомобиля пересылает данную команду в APA ECU для того, чтобы система APA ECU автомобиля могла, получив команду на управление процессом парковки, непосредственно на основе такой команды определять все команды, которые должны выполнить связанные системы автомобиля во время автоматической парковки, и отправлять упомянутые команды во все связанные системы, соответственно, для того, чтобы каждая из связанных систем могла выполнять полученные команды, пока автомобилем не будет полностью выполнен процесс автоматической парковки.
Например, если поступающая в автомобиль команда на управление процессом парковки является командой на продолжение автоматической парковки, то это означает, что пользователь в данный момент непрерывно следит за процессом автоматической парковки, причем во время совершения автоматической парковки им не обнаружено в автомобиле никаких аварийных факторов, таких как, например, появление на траектории парковки автомобиля преград, способных воспрепятствовать процессу парковки, и в данной связи пользователь желает продолжить автоматически парковаться. В таком случае APA ECU, получив команду на продолжение автоматической парковки, управляет связанными системами автомобиля, которые продолжают выполнять автоматическую парковку автомобиля.
Если поступающая в автомобиль команда на управление процессом парковки является командой на прерывание автоматической парковки, то это означает, что мобильным устройством выявлено отсутствие непрерывно вводимых пользователем на своем экране операций с жестами, идентичными заданным траекториям выполнения операций, т.е. в данный момент пользователь по той или иной причине не ведет постоянного наблюдения за процессом автоматической парковки или во время совершения автоматической парковки им обнаружены в автомобиле аварийные факторы, такие как, например, появление на траектории парковки автомобиля преград, способных воспрепятствовать процессу парковки, и в данной связи пользователь желает прервать процесс автоматической парковки. В таком случае APA ECU, получив команду на прерывание автоматической парковки, управляет связанными системами автомобиля, которые прерывают автоматическую парковку автомобиля. Говоря конкретнее, APA ECU генерирует команду на торможение автомобиля и подает ее в систему ESP, отвечающую за исполнение такой команды и предотвращение столкновения автомобиля с внезапно появившейся в пределах участка парковки во время совершения автоматической парковки преградой. APA ECU генерирует команду на прекращение вращения руля и подает ее в систему ESP, отвечающую за исполнение такой команды, в результате чего перестает вращаться рулевое колесо и прекращается процесс автоматической парковки. APA ECU генерирует команду на переключение передач и подает ее в систему TCU, отвечающую за исполнение такой команды, в результате чего передача, на которой движется автомобиль в процессе автоматической парковки, переключается на холостую или парковочную.
Исходя из вышеизложенного, способ автоматической парковки, представляемый в примере реализации настоящего раскрытия и применимый к мобильным устройствам, включает в себя: прием введенной пользователем оперативной информации при поступлении команды о начале выполнения автоматической парковки; генерацию команды на управление процессом парковки на основе оперативной информации; отправку команды на управление процессом парковки в автомобиль для выполнения автомобилем операций, связанных с автоматической парковкой, в соответствии с командой на управление процессом парковки. Согласно примеру реализации настоящего раскрытия, предусмотрена возможность преобразования мобильным устройством во время управления процессом автоматической парковки автомобиля введенной пользователем в мобильное устройство оперативной информации с достаточно большим объемом данных в команду на управление процессом парковки с маленьким объемом данных, которая впоследствии подается только в контроллер системы автоматизированного паркинга в автомобиле с тем, чтобы автомобиль мог выполнить автоматическую парковку. Такая возможность позволяет, с одной стороны, снижать информационную нагрузку на канал связи между мобильным устройством и автомобилем в процессе автоматической парковки, повышать эффективность самого процесса парковки и одновременно с этим расширять функции, при выполнении которых используются коммуникационные данные и ресурсы, а с другой стороны, сокращать объем расчетов, производимых контроллером системы автоматизированного паркинга, кроме того, такая возможность позволяет поддерживать способы ввода пользователем самоопределяемой оперативной информации и повышать комфортность пользователя во время реализации предлагаемого способа.
На Фиг. 4 представлена технологическая схема другого способа автоматической парковки, упомянутого в примере реализации настоящего раскрытия.
Способ автоматической парковки, представляемый данным примером реализации настоящего раскрытия и применимый к автомобилям, оборудованным контроллерами системы автоматизированного паркинга.
Шаг 201: прием вводимых пользователем заданных операций посредством упомянутого контроллера системы автоматизированного паркинга.
На данном шаге предусмотрена возможность приема системой APA ECU вводимых пользователем заданных операций, если автомобиль оснащен системой APA ECU, и определения намерений пользователя относительно запуска автоматической парковки.
Согласно примеру реализации настоящего раскрытия, упомянутой предварительно заданной операцией, введенной пользователем, может быть действие пользователя, которым он выбирает автоматическую парковку, например, если на приборной панели автомобиля установлены вспомогательные выключатели или кнопки управления автоматической парковкой, то упомянутые предварительно заданные операции, вводимые пользователем, могут быть операции, для выполнения которых пользователь нажимает вспомогательные выключатели или кнопки управления автоматической парковкой в случае, если он желает совершить автоматическую парковку своего автомобиля, и в таком случае APA ECU может посредством сетевой структуры всего автомобиля получить информацию о том, выполняет ли пользователь перечисленные выше заданные операции.
Помимо вышесказанного, если на приборной панели автомобиля установлены вспомогательные выключатели или кнопки управления автоматической парковкой, то, пользователь, желающий совершить автоматическую парковку своего автомобиля, нажимает вспомогательные выключатели или кнопки управления автоматической парковкой, и в таком случае APA ECU может посредством сетевой структуры всего автомобиля получить информацию о том, выполняет ли пользователь перечисленные выше заданные операции.
Шаг 202: получение информации о передаче, на которой движется упомянутый автомобиль.
На данном шаге предусмотрена возможность получения информации о передаче, на которой движется автомобиль, посредством APA ECU, если автомобиль оснащен APA ECU.
Шаг 203: генерация команды о начале автоматической парковки на основе упомянутой информации о заданных операциях и упомянутой информации о передаче и отправка такой команды в мобильное устройство для того, чтобы мобильное устройство, получив команду о начале автоматической парковки и оперативную информацию, введенную пользователем, на основе данной информации сгенерировало команду на управление процессом парковки и отправило такую команду в автомобиль;
На данном шаге предусмотрена возможность анализа APA ECU намерений пользователя, соответствующих введенным заданным операциям, и текущего состояния автомобиля на основе полученной информации об упомянутых заданных операциях и упомянутой информации о передаче, а также генерации им команды о начале выполнения автоматической парковки.
Согласно примеру реализации настоящего раскрытия, если упомянутой заданной операцией является нажатие пользователем вспомогательных выключателей или кнопок управления автоматической парковкой, а информацией о передаче является информация о том, что текущая передача, на которой движется автомобиль, является передней или холостой, что свидетельствует о намерении пользователя в данный момент автоматически припарковать автомобиль и о нормальном движении автомобиля, то генерируется команда о начале процесса автоматической парковки. Если же упомянутой заданной операцией является нажатие пользователем вспомогательных выключателей или кнопок управления автоматическим выездом автомобиля с места парковки, а информацией о передаче является информация о том, что текущая передача, на которой движется автомобиль, является парковочной, что свидетельствует о намерении пользователя в данный момент совершить автоматический выезд с места парковки и о неподвижном состоянии автомобиля, то генерируется команда о начале процесса автоматического выезда с места парковки.
Далее, APA ECU отправляет сгенерированную команду о начале процесса автоматической парковки в мобильное устройство для того, чтобы мобильное устройство могло начать на основе такой команды получать оперативную информацию, вводимую пользователем с целью контролировать процесс автоматической парковки. Мобильное устройство на основе данной оперативной информации подтверждает команду на управление процессом парковки, при наличии которой пользователь может контролировать процесс автомматической парковки.
Шаг 204: получение от упомянутого мобильного устройства команды на управление процессом парковки и выполнение в соответствии с такой командой операций, связанных с автоматической парковкой.
На данном шаге предусмотрена возможность получения автомобилем подаваемой мобильным устройством команды на управление процессом парковки посредством APA ECU и выполнения им в соответствии с такой командой операций, связанных с автоматической парковкой.
Говоря конкретнее, APA ECU может, получив команду на управление процессом парковки, непосредственно на основе такой команды определять все команды, которые должны выполнить связанные системы автомобиля во время автоматической парковки, и отправлять упомянутые команды во все связанные системы, соответственно, для того, чтобы каждая из связанных систем могла выполнять полученные команды, пока автомобилем не будет полностью выполнен процесс автоматической парковки.
Например, если поступающая в автомобиль команда на управление процессом парковки является командой на продолжение автоматической парковки, то это означает, что пользователь в данный момент непрерывно следит за процессом автоматической парковки, причем во время совершения автоматической парковки им не обнаружено в автомобиле никаких аварийных факторов, таких как, например, появление на траектории парковки автомобиля преград, способных воспрепятствовать процессу парковки, и в данной связи пользователь желает продолжить автоматически парковаться. В таком случае APA ECU, получив команду на продолжение автоматической парковки, управляет связанными системами автомобиля, которые продолжают выполнять автоматическую парковку автомобиля.
Если поступающая в автомобиль команда на управление процессом парковки является командой на прерывание автоматической парковки, то это означает, что мобильным устройством выявлено отсутствие непрерывно вводимых пользователем на своем экране операций с жестами, идентичными заданным траекториям выполнения операций, т.е. в данный момент пользователь по той или иной причине не ведет постоянного наблюдения за процессом автоматической парковки или во время совершения автоматической парковки им обнаружены в автомобиле аварийные факторы, такие как, например, появление на траектории парковки автомобиля преград, способных воспрепятствовать процессу парковки, и в данной связи пользователь желает прервать процесс автоматической парковки. В таком случае APA ECU, получив команду на прерывание автоматической парковки, управляет связанными системами автомобиля, которые прерывают автоматическую парковку автомобиля. Говоря конкретнее, APA ECU генерирует команду на торможение автомобиля и подает ее в систему ESP, отвечающую за исполнение такой команды и предотвращение столкновения автомобиля с внезапно появившейся в пределах участка парковки во время совершения автоматической парковки преградой. APA ECU генерирует команду на прекращение вращения руля и подает ее в систему ESP, отвечающую за исполнение такой команды, в результате чего перестает вращаться рулевое колесо и прекращается процесс автоматической парковки. APA ECU генерирует команду на переключение передач и подает ее в систему TCU, отвечающую за исполнение такой команды, в результате чего передача, на которой движется автомобиль в процессе автоматической парковки, переключается на холостую или парковочную.
Исходя из вышеизложенного, способ автоматической парковки, представляемый в примере реализации настоящего раскрытия и применимый к автомобилям, оборудованным контроллерами системы автоматизированного паркинга, включает в себя: прием введенных пользователем заданных операций посредством контроллером системы автоматизированного паркинга; получение информации о передаче, на которой движется автомобиль; генерацию команды о начале автоматической парковки на основе информации о заданных операциях и информации о передаче и отправку такой команды в мобильное устройство; прием подаваемой мобильным устройством команды на управление процессом автоматической парковки и выполнение в соответствии с такой командой операций, связанных с автоматической парковкой. Согласно примеру реализации настоящего раскрытия, предусмотрена возможность преобразования мобильным устройством во время управления процессом автоматической парковки автомобиля введенной пользователем в мобильное устройство оперативной информации с достаточно большим объемом данных в команду на управление процессом парковки с маленьким объемом данных, которая впоследствии подается только в контроллер системы автоматизированного паркинга в автомобиле с тем, чтобы автомобиль мог выполнить автоматическую парковку. Такая возможность позволяет, с одной стороны, снижать информационную нагрузку на канал связи между мобильным устройством и автомобилем в процессе автоматической парковки, повышать эффективность самого процесса парковки и одновременно с этим расширять функции, при выполнении которых используются коммуникационные данные и ресурсы, а с другой стороны, сокращать объем расчетов, производимых контроллером системы автоматизированного паркинга, кроме того, такая возможность позволяет поддерживать способы ввода пользователем самоопределяемой оперативной информации и повышать комфортность пользователя во время реализации предлагаемого способа.
На Фиг. 5 представлена технологическая схема взаимодействия по способу автоматической парковки, упомянутому в примере реализации настоящего раскрытия.
Способ автоматической парковки, представляемый данным примером реализации настоящего раскрытия и применимый к системе автоматизированного паркинга, включающей в себя мобильное устройство и автомобиль.
Шаг 301: прием вводимых пользователем заданных операций посредством упомянутого контроллера системы автоматизированного паркинга.
Данный шаг аналогичен изложенному выше шагу 201 и поэтому не будет подробно описан далее.
Шаг 302: получение упомянутым автомобилем информации о передаче, на которой движется упомянутый автомобиль.
Данный шаг аналогичен изложенному выше шагу 202 и поэтому не будет подробно описан далее.
Шаг 303: получение информации об окружающей обстановке, присланной датчиками автомобиля, генерация эффективной информации о парковочных местах и получение информации о выборе пользователем той или иной из упомянутой эффективной информации о парковочных местах.
После того, как выполнен шаг 301, упомянутый автомобиль может, получив введенную пользователем заданную операцию, генерировать команду на отправку данных об окружающей обстановке вокруг автомобиля и посредством APA ECU пересылать такую команду в установленный в автомобиле SENSOR, который может включать в себя радиолокационный датчик, служащий для выявления вокруг автомобиля преград, и автомобильную камеру, служащую для проверки обстановки вокруг автомобиля. Упомянутый SENSOR, получив команду на отправку данных об окружающей обстановке вокруг автомобиля, сообщает данные об окружающей обстановке, собранные радиолокационным датчиком и автомобильной камерой, в систему APA ECU, которая на основе полученных данных об обстановке устанавливает наличие или отсутствие вокруг автомобиля эффективного пространства, отвечающего требованиям по размерам парковочного места и не имеющего внутри себя преград, и определяет эффективное пространство в качестве эффективного места для парковки автомобиля.
Оптимальным решением является то, упомянутым эффективным пространством может быть пространство определенных размеров, определяемых в соответствии с моделью паркуемого автомобиля. Так, размеры парковочного места могут быть следующие: 6×2,7 м.
Далее, как видно на Фиг. 2, APA ECU 50 может направить упомянутую эффективную информацию о парковочных местах в дисплейный блок в автомобиле 150, который может, получив данную информацию, отображать ее в своем интерфейсе и создавать в данном интерфейсе меню с опциями для выбора пользователем конечного места парковки. На Фиг. 6 представлен интерфейс отображения эффективной информации о парковочных местах, упомянутый в примере реализации настоящего раскрытия, где А - эффективное пространство, отвечающее требованиям по размерам парковочного места, т.е. эффективное для выполнения автоматической парковки автомобиля парковочное место. В таком случае пользователь может выбрать в интерфейсе, представленном на Фиг. 6, парковочное место А и устрановить его в качестве конечного парковочного места для совершения автоматической парковки автомобиля.
Помимо вышесказанного, после того, как пользователем выбрана в интерфейсе дисплейного блока автомобиля та или иная эффективная информация о парковочных местах, дисплейный блок направляет выбранную пользователем информацию в систему APA ECU.
Далее, если в APA ECU поступает упомянутая информация о сделанном выборе, то это, с одной стороны, означает, что вокруг автомобиля обнаружены эффективные парковочные места, в которых можно автоматически припарковать автомобиль, а с другой стороны, свидетельствует о том, что пользователь подтвердил свое намерение выполнить автоматическую парковку и по собственной инициативе выбрал эффективное парковочное место, соответствующее условиям для совершения автоматической парковки автомобиля.
Опционально, как показано на Фиг. 6, пользователь также может выбрать в отображаемом интерфейсе дисплейного блока автомобиля режим «Парковаться одним нажатием». В таком случае APA ECU управляет связанными системами автомобиля при выполнении ими операций, направленных на парковку за счет одного клика и парковку автомобиля в парковочном месте, указанном по умолчанию системы.
Шаг 304: генерация и отображение упомянутым автомобилем сообщения с напоминанием о необходимости торможения.
На данном шаге предусмотрена возможность генерации и отображения на автомобильном мониторе сообщения с напоминанием о необходимости торможения или напоминания пользователю путем голосового оповещения о необходимости тормозить автомобиль, если в автомобиль поступает информация о выборе пользователем той или иной из эффективной информации о парковочных местах, при этом торможение автомобиля происходит благодаря срабатыванию тормозной системы, после чего начинается этап подготовки автомобиля к автоматической парковке.
Шаг 305: получение упомянутым автомобилем информации о скорости своего движения и генерация информации о том, что автомобиль находится в неподвижном состоянии, если скорость упомянутого автомобиля составляет 0 км/ч.
После того, как выполнен шаг 303, упомянутый автомобиль может сгенерировать команду о сообщении информации, касающейся скорости его движения, и посредством APA ECU передать данную команду в установленную в автомобиле систему ESP, которая, получив информацию о текущей скорости движения автомобиля, передает ее в APA ECU, и, если скорость упомянутого автомобиля составляет 0 км/ч, то APA ECU генерирует информацию о неподвижном состоянии автомобиля.
Шаг 306: генерация автомобилем упомянутой команды о начале автоматической парковки в соответствии с упомянутой информацией о заданных операциях, упомянутой информацией о передаче, упомянутой информацией о выборе пользователя и упомянутой информации о неподвижном состоянии автомобиля после получения информации о своем неподвижном состоянии и информации о выборе пользователем той или иной из упомянутой эффективной информации о парковочных местах, а также подача упомянутой команды о начале автоматической парковки в мобильное устройство.
На данном шаге получение автомобилем информации о своем неподвижном состоянии означает, что в текущий момент автомобиль находится в неподвижном состоянии, а поступление в автомобиль сигнала о выборе пользователем упомянутой эффективной информации о парковочных местах означает, что пользователь по своей инициативе выбрал эффективное для автоматической парковки парковочное место, т.е. пользователь желает в текущий момент совершить автоматическую парковку своего автомобиля, а обстановка вокруг автомобиля отвечает условиям для совершения автоматической парковки. В таком случае автомобиль может генерировать команду о начале процесса автоматической парковки и отправлять такую команду в мобильное устройство, которое при этом начинает получать вводимую пользователем оперативную информацию.
На данном шаге предусмотрена возможность анализа APA ECU намерений пользователя, соответствующих введенным заданным операциям, и текущего состояния автомобиля на основе полученной информации о заданных операциях, информации о передаче, информации о выборе и информации о неподвижном состоянии автомобиля, а также генерации им команды о начале выполнения автоматической парковки.
Согласно примеру реализации настоящего раскрытия, если упомянутой заданной операцией является нажатие пользователем вспомогательных выключателей или кнопок управления автоматической парковкой, а информацией о передаче является информация о том, что текущая передача, на которой движется автомобиль, является передней или холостой, кроме того, получена информация о выборе пользователя и о неподвижном состоянии автомобиля, что свидетельствует о намерении пользователя в данный момент автоматически припарковать автомобиль и о том, что после приведения в действие тормоза автомобиль перешел из состояния нормального движения в неподвижное состояние, причем на участке вокруг автомобиля имеются эффективные парковочные места, в которых автомобиль может быть автоматически припаркован, а пользователь о своей инициативе выбрал эффективное для автоматической парковки парковочное место, т.е. пользователь желает в текущий момент совершить автоматическую парковку своего автомобиля, а обстановка вокруг автомобиля отвечает условиям для совершения автоматической парковки, то APA ECU генерирует команду о начале процесса автоматического выезда с места парковки.
Шаг 307: прием упомянутым мобильным устройством введенной пользователем оперативной информации при поступлении команды о начале выполнения автоматической парковки.
На данном шаге к упомянутой оперативной информации относится любой из следующих типов информации: информация о жестах пользователя по экрану мобильного устройства, информация о нажатиях клавиш, информация о голосовом управлении и информация о тряске пользователем упомянутого мобильного устройства. Согласно примеру реализации настоящего раскрытия, мобильное устройство принимает вводимую пользователем оперативную информацию с той целью, чтобы определить на основе упомянутой оперативной информации, ведет ли пользователь постоянный контроль за процессом автоматической парковки, и получить информацию о том, вмешивается ли пользователь в данный процесс, и соответствующие команды.
Шаг 308: генерация упомянутым мобильным устройство команды на управление процессом парковки на основе упомянутой оперативной информации.
Опционально, шаг 308, выполняемый при данном способе реализации настоящего раскрытия, может включать в себя и следующий подшаг:
Шаг 3081: преобразование части оперативной информации, полученной в течение первого заданного временного интервала, в упомянутую команду на управление процессом парковки в соответствии с установленными правилами, причем такое преобразование производится через каждый промежуток времени, равный упомянутому первому заданному временному интервалу, на протяжении всего процесса приема упомянутым мобильным устройством упомянутой оперативной информации.
На данном шаге предусмотрена возможность преобразования мобильным устройством части оперативной информации, полученной в течение первого заданного временного интервала, в упомянутую команду на управление процессом парковки в соответствии с установленными правилами, причем такое преобразование производится через каждый промежуток времени, равный упомянутому первому заданному временному интервалу, на протяжении всего процесса приема упомянутым мобильным устройством упомянутой оперативной информации.
Опционально, к упомянутым установленным правилам могут отнестись следующие правила: если упомянутая оперативная информация соответствует первой заданной операции, а время, в течение которого упомянутая оперативная информация и первая заданная операция соответствуют друг другу, больше или равно второму заданному временному интервалу, то упомянутая сгенерированная команда на управление процессом парковки рассматривается как информация о продолжении автоматизированного паркинга; если упомянутая оперативная информация не соответствует первой заданной операции или время, в течение которого упомянутая оперативная информация и первая заданная операция соответствуют друг другу, меньше упомянутого второго заданного временного интервала, то упомянутая сгенерированная команда на управление процессом парковки рассматривается как информация о прерывании автоматизированного паркинга.
Говоря конкретнее, в интерфейсе мобильного приложения в мобильном устройстве могут отображаться предварительно заданные картины. Жест пользователя, предполагающий проскальзывающее движение его пальца вдоль заданной картины в упомянутом интерфейсе, и является первой заданной операцией. На Фиг. 7 представлен интерфейс мобильного приложения, упомянутый в примере реализации настоящего раскрытия, где видно, что первой заданной операцией является жест пользователя, предполагающий проскальзывающее движение его пальца вдоль картины В, которая и является заданной картиной.
Оптимальным решением является то, что упомянутые заданные картины могут быть настроены пользователем исходя из фактической обстановки.
Оптимальным решением является то, что упомянутый первый временной интервал может иметь фиксированное значение, например, 0,2 сек или 0,4 сек.
Оптимальным решением является то, что упомянутый второй временной интервал также может иметь фиксированное значение, например, 0,1 сек или 0,2 сек.
Говоря конкретнее, если заданной картиной является рисунок В, первый заданный временной интервал составляет 1 сек, а второй - 0,8 сек, то процесс генерации мобильным устройством команды на управление процессом парковки на основе оперативной информации может протекать следующим образом: мобильное устройство принимает от пользователя оперативную информацию, которую последний вводит в интерфейсе мобильного приложения, и через каждую 1 сек проводит сравнение той оперативной информации, которую оно получило за эту секунду, с рисунком В. Если в течение 1 сек временной промежуток, в течение которого упомянутая оперативная информация соответствует форме рисунка В, превышает 0,8 сек, что свидетельствует о постоянном проскальзывании пользователем пальцем по экрану мобильного приложения вдоль формы рисунка В, т.е. о том, что пользователь постоянно контролирует процесс автоматической парковки автомобиля посредством мобильного приложения, то генерируемой при этом мобильным устройством на основе вводимой пользователем оперативной информации командой на управление процессом парковки является команда на продолжение автоматической парковки, и, после того как мобильное устройство подает в автомобиль команду на продолжение автоматической парковки, автомобиль выполняет соответствующие действия с целью продолжить процесс автоматической парковки.
Если в течение 1 сек упомянутая оперативная информация не соответствует форме рисунка В или временной промежуток, в течение которого упомянутая оперативная информация соответствует форме рисунка В, менее 0,8 сек, что свидетельствует об отсутствии постоянных проскальзывающих движений пользователя пальцем по экрану мобильного приложения вдоль формы рисунка В, т.е. о том, что пользователь не контролирует процесс автоматической парковки автомобиля посредством мобильного приложения или пользователь, обнаружив во время совершения автоматической парковки аварийных факторов, которые могли бы повлиять на процесс автоматической парковки, перестал проскальзывать пальцем по экрану мобильного приложения, то генерируемой при этом мобильным устройством на основе вводимой пользователем оперативной информации командой на управление процессом парковки является команда на прерывание автоматической парковки, и, после того как мобильное устройство подает в автомобиль команду на прерывание автоматической парковки, автомобиль выполняет соответствующие действия с целью прервать процесс автоматической парковки.
Опционально, шаг 308, выполняемый при другом способе реализации настоящего раскрытия, может включать в себя и следующий подшаг:
Шаг 3082: преобразование упомянутой оперативной информации в упомянутую команду на управление процессом парковки в соответствии с установленными правилами после получения в полном объеме упомянутой оперативной информации.
На данном шаге предусмотрена возможность приема мобильным устройством оперативной информации, вводимой пользователем, и преобразования полученной оперативной информации в упомянутую команду на управление процессом парковки в соответствии с установленными правилами после установления мобильным устройством в процессе приема упомянутой оперативной информации того, что данная информация получена в полном объеме.
Опционально, к упомянутым установленным правилам могут отнестись следующие правила: если упомянутая оперативная информация соответствует первой заданной операции, а время, в течение которого упомянутая оперативная информация и первая заданная операция соответствуют друг другу, больше или равно второму заданному временному интервалу, то упомянутая сгенерированная команда на управление процессом парковки рассматривается как информация о продолжении автоматизированного паркинга; если упомянутая оперативная информация не соответствует первой заданной операции или время, в течение которого упомянутая оперативная информация и первая заданная операция соответствуют друг другу, меньше упомянутого второго заданного временного интервала, то упомянутая сгенерированная команда на управление процессом парковки рассматривается как информация о прерывании автоматизированного паркинга.
Говоря конкретнее, в интерфейсе мобильного приложения мобильного устройства могут отображаться предварительно заданные картины. Жест пользователя, предполагающий проскальзывающее движение его пальца вдоль заданной картины в упомянутом интерфейсе, и является первой заданной операцией. Как видно на Фиг. 7, первой заданной операцией является жест пользователя, предполагающий проскальзывающее движение его пальца вдоль картины В, которая и является заданной картиной.
Говоря конкретнее, если заданной картиной является рисунок В, а второй заданный временной интервал составляет 0,8 сек, то процесс генерации мобильным устройством команды на управление процессом парковки на основе оперативной информации может протекать следующим образом: мобильное устройство принимает от пользователя оперативную информацию, которую последний вводит в интерфейсе мобильного приложения, и после того, как оно устанавливает, что оперативная информация получена в полном объеме, т.е. получена вся информация, начиная с момента прикосновения пользователем пальцем к экрану мобильного приложения до момента, когда палец пользователя отдаляется от экрана мобильного приложения, проводит сравнение полученной в полном объеме оперативной информации с рисунком В. Если время, в течение которого упомянутая оперативная информация соответствует форме рисунка В, превышает 0,8 сек, что свидетельствует о постоянном проскальзывании пользователем пальцем по экрану мобильного приложения вдоль формы рисунка В, т.е. о том, что пользователь постоянно контролирует процесс автоматической парковки автомобиля посредством мобильного приложения, то генерируемой при этом мобильным устройством на основе вводимой пользователем оперативной информации командой на управление процессом парковки является команда на продолжение автоматической парковки, и, после того как мобильное устройство подает в автомобиль команду на продолжение автоматической парковки, автомобиль выполняет соответствующие действия с целью продолжить процесс автоматической парковки.
Если упомянутая оперативная информация не соответствует форме рисунка В или время, в течение которого упомянутая оперативная информация соответствует форме рисунка В, менее 0,8 сек, что свидетельствует об отсутствии постоянных проскальзывающих движений пальца пользователем по экрану мобильного приложения вдоль формы рисунка В, т.е. о том, что пользователь не контролирует процесс автоматической парковки автомобиля посредством мобильного приложения или пользователь, обнаружив во время совершения автоматической парковки аварийных факторов, которые могли бы повлиять на процесс автоматической парковки, перестал проскальзывать пальцем по экрану мобильного приложения, то генерируемой при этом мобильным устройством на основе вводимой пользователем оперативной информации командой на управление процессом парковки является команда на прерывание автоматической парковки, и, после того как мобильное устройство подает в автомобиль команду на прерывание автоматической парковки, автомобиль выполняет соответствующие действия с целью прервать процесс автоматической парковки.
Опционально, шаг 3082 может включать в себя следующий подшаг:
Шаг 30821: преобразование упомянутой оперативной информации в упомянутую команду на управление процессом парковки в соответствии с упомянутыми установленными правилами после получения упомянутым мобильным устройством в полном объеме упомянутой оперативной информации, если пропускная способность канала связи между упомянутым мобильным устройством и упомянутым автомобилем меньше пороговой величины пропускной способности.
На данном шаге предусмотрена возможность отправки в автомобиль команды на управление процессом парковки, сгенерированной в соответствии с полученной оперативной информацией после получения мобильным устройством упомянутой оперативной информации в полном объеме, если упомянутая пропускная способность меньше пороговой величины пропускной способности, что свидетельствует о слабой коммуникации между мобильным устройством и упомянутым автомобилем. Так можно сократить объем данных, передаваемых между мобильным устройством и автомобилем, и повысить эффективность всего процесса автоматической парковки. Если подавать сгенерированную на основе оперативной информации команду на управление процессом парковки через слишком короткий временной интервал, это может привести к блокировке канала связи между мобильным устройством и автомобилем.
Опционально, к упомянутой оперативной информации относится любой из следующих типов информации: информация о жестах по экрану упомянутого мобильного устройства, информация о нажатиях клавиш, информация о голосовом управлении и информация о тряске упомянутого мобильного устройства.
Опционально, если упомянутой оперативной информацией является информация о движении пальцев по экрану упомянутого мобильного устройства, а упомянутыми предварительно заданными траекториями совершения операций являются траектории жестов, то шаг 308 может включать в себя следующие подшаги:
Шаг 3083: отображение упомянутым мобильным устройством на своем экране предварительно заданных траекторий жестов и напоминаний, причем упомянутые напоминания служат для оповещения пользователя о необходимости ввести оперативную информацию.
На данном шаге предусмотрена, как видно в предлагаемом в примере реализации настоящего раскрытия интерфейсе другого мобильного приложения, представленном на Фиг. 8, возможность отображения мобильным устройством в своем приложении предварительно заданных траекторий жестов С и напоминания, служащего для оповещения пользователя о необходимости ввести оперативную информацию и выглядящего следующим образом: «Для выполнения парковки непрерывно проскальзывайте пальцем по экрану!»
Шаг 3084: установление упомянутым мобильным устройством упомянутой сгенерированной команды на управление процессом парковки в качестве команды о продолжении автоматизированного паркинга в соответствии с установленными правилами, если поступает упомянутая оперативная информация и она соответствует упомянутым предварительно заданным траекториям жестов;
На данном шаге предусмотрена возможность сравнения упомянутой оперативной информацией и траекторий заданных жестов, при этом упомянутой оперативной информацией может быть информация о жестах, совершаемых по экрану упомянутого мобильного устройства, и, если оперативная информация соответствует траекториям заданных жестов, а время, в течение которого оперативная информация и первая заданная операция соответствуют друг другу, больше или равно второму заданному временному интервалу, то упомянутая сгенерированная команда на управление процессом парковки рассматривается как команда о продолжении автоматизированного паркинга, т.е. пользователь непрерывно проскальзывает пальцем по экрану мобильного приложения по траекториям заданных жестов и посредством мобильного приложения ведет постоянный контроль за процессом автоматической парковки автомобиля. В таком случае, после того как мобильное устройство подает в автомобиль команду, сгенерированную мобильным устройством на основе введенной пользователем оперативной информации как команду на продолжение автоматической парковки, автомобиль выполняет соответствующие действия с целью продолжить процесс автоматической парковки.
Шаг 3085: установление упомянутым мобильным устройством упомянутой сгенерированной команды на управление процессом парковки в качестве команды о прерывании автоматизированного паркинга в соответствии с упомянутыми установленными правилами, если поступает упомянутая оперативная информация и она не соответствует упомянутым предварительно заданным траекториям жестов.
На данном шаге предусмотрена возможность сравнения упомянутой оперативной информацией и траекторий заданных жестов, при этом упомянутой оперативной информацией может быть информация о жестах, совершаемых по экрану упомянутого мобильного устройства, и, если упомянутая оперативная информация не соответствует траекториям заданных жестов, то упомянутая сгенерированная команда на управление процессом парковки рассматривается как команда о прерывании автоматизированного паркинга, т.е. пользователь не совершает постоянных проскальзывающих движений пальца по экрану мобильного приложения по траекториям заданных жестов и не контролирует процесс автоматической парковки автомобиля посредством мобильного приложения. В таком случае, после того как мобильное устройство подает в автомобиль команду, сгенерированную мобильным устройством на основе введенной пользователем оперативной информации как команду на прерывание автоматической парковки, автомобиль выполняет соответствующие действия с целью прервать процесс автоматической парковки.
Шаг 309: отправка упомянутым мобильным устройством упомянутой команды на управление процессом парковки в автомобиль для выполнения упомянутым автомобилем операций, связанных с автоматической парковкой, в соответствии с упомянутой командой на управление процессом парковки.
Данный шаг аналогичен изложенному выше шагу 103 и поэтому не будет подробно описан далее.
Шаг 310: получение упомянутым автомобилем от упомянутого мобильного устройства команды на управление процессом парковки и выполнение им в соответствии с такой командой операций, связанных с автоматической парковкой.
Данный шаг аналогичен изложенному выше шагу 204 и поэтому не будет подробно описан далее.
Шаг 311: прием упомянутым автомобилем от связанных систем упомянутого автомобиля информации о состоянии, генерация текущей информации о парковке автомобиля и отправка упомянутой текущей информации о парковке упомянутого автомобиля в упомянутое мобильное устройство.
В процессе автоматической парковки автомобиль может посредством APA ECU получать от связанных систем автомобиля информации о состоянии, генерировать на основе полученной от связанных систем информации текущую информацию о парковке автомобиля и отправлять упомянутую текущую информацию о парковке автомобиля в мобильное устройство.
Согласно примеру реализации настоящего раскрытия, APA ECU может посредством BCM получать информацию о состоянии дверей и, если он обнаруживает двери открытыми, то в интерфейсе упомянутого мобильного приложения отображается надпись «Двери открыты!» и сгенерированная текущая информация о парковке автомобиля определяется как информация о прерванной парковке с возможностью возобновить процесс парковки, если же APA ECU обнаруживает задние двери открытыми, то в интерфейсе упомянутого мобильного приложения также отображается надпись «Двери открыты!» и сгенерированная текущая информация о парковке автомобиля также определяется как информация о прерванной парковке с возможностью возобновить процесс парковки. APA ECU может посредством SENSOR получать информацию об окружающей обстановке вокруг автомобиля, и если он обнаруживает присутствие вблизи автомобиля преград, то в интерфейсе упомянутого мобильного приложения отображается надпись «Обнаружена преграда!» и сгенерированная текущая информация о парковке автомобиля определяется как информация о прерванной парковке с возможностью возобновить процесс парковки. APA ECU может посредством Блютуз-модуля получать данные о расстоянии от автомобиля до мобильного устройства, и если он обнаруживает, что фактическое расстояние между автомобилем и мобильным устройством превысило безопасную дистанцию, то в интерфейсе упомянутого мобильного приложения отображается надпись «Блютуз-ключ превысил безопасную дистанцию!» и сгенерированная текущая информация о парковке автомобиля определяется как информация о прерванной парковке с возможностью возобновить процесс парковки. Также посредством Блютуз-модуля APA ECU может получать информацию о непрерывности совершения пользователем проскальзывающих движений пальцем по экрану мобильного приложения и, если он обнаруживает, что пользователь перестал проскальзывать пальцем по экрану мобильного устройства, то в интерфейсе упомянутого мобильного приложения отображается надпись «Водитель перестал совершать проскальзывающие движения по экрану!» и сгенерированная текущая информация о парковке автомобиля определяется как информация о прерванной парковке с возможностью возобновить процесс парковки.
Шаг 312: прием и отображение упомянутым мобильным устройством текущей информации о парковке, присылаемой упомянутым автомобилем, причем под упомянутой текущей информацией о парковке понимается информация о состоянии всех связанных систем упомянутого автомобиля.
На Фиг. 9 представлен интерфейс другого мобильного приложения, упомянутый в примере реализации настоящего раскрытия. После получения мобильным устройством текущей информации о парковке автомобиля в интерфейсе его мобильного приложения отображается данная информация.
Опционально, к упомянутой текущей информации о парковке автомобиля относится любой из следующих типов информации: информация о нормальной парковке, информация о прерванной парковке с возможностью возобновить процесс парковки и информация о прерванной парковке без возможности возобновить процесс парковки.
Согласно примеру реализации настоящего раскрытия, к информации о нормальной парковке может отнестись: информация о текущей скорости движения автомобиля, информация о траектории парковки автомобиля, информация о процессе выполнения автомобилем паркинга и т.д.; к информации о прерванной парковке с возможностью возобновить процесс парковки может отнестись: информация об открытых дверях автомобиля, информация о превышении Блютуз-ключом безопасной дистанции, информация о прекращении водителем проскальзывающих движений пальцем по мобильному телефону, информация о наличии преград, препятствующих парковке, и т.д.; к информации о прерванной парковке без возможности возобновить процесс парковки может отнестись: информация об ошибках в связанных системах, информация о наличии внешних помех, влияющих на работу рулевого колеса, рычага переключения передач и ручного тормоза, информация о том, что частота парковки превысила первую заданную частоту, информация о превышении автомобилем заданной скорости движения, информация о том, что продолжительность парковки превысила четвертый заданный временной интервал, информация о том, что частота прерывания парковки с возможностью возобновления процесса превысила вторую заданную частоту, информация о том, что продолжительность прерывания парковки превысила пятый заданный временной интервал, информация о прерывании связи между автомобилем и мобильным устройством, информация о том, что зеркало заднего вида автомобиля находится в свернутом состоянии, и т.д.
Оптимальным решением является то, что первая заданная частота может составлять 10 раз.
Оптимальным решением является то, что заданная скорость может составлять 7 км/ч.
Оптимальным решением является то, что четвертый заданный временной интервал может составлять 4 минуты.
Оптимальным решением является то, что вторая заданная частота может составлять 4 раза.
Оптимальным решением является то, что пятый заданный временной интервал может составлять 30 секунд.
Опционально, в случае если упомянутой текущей информацией о парковке автомобиля является упомянутая информация о прерванной парковке с возможностью возобновить процесс парковки, то упомянутый способ также включает в себя следующие шаги:
Шаг 313: генерация упомянутым мобильным устройством информации о запросе возобновления процесса парковки и отображение такой информации, если упомянутой текущей информацией о парковке автомобиля является информация о нормальной парковке.
На данном шаге предусмотрена возможность генерации мобильным устройством информации о запросе возобновления процесса парковки и отображение такой информации в интерфейсе мобильного приложения, если упомянутой текущей информацией о парковке автомобиля является информация о прерванной парковке с возможностью возобновить процесс парковки, т.е. в текущий момент процесс автоматической парковки автомобиля прерван, но ее возобновление является возможным, и процесс автоматической парковки прерван по причине обнаружения преград, препятствующих автомобилю автоматически парковаться, а после установления того, что преграды устранены, текущая информация о парковке автомобиля обновляется и снова становится информацией о нормальной парковке.
Шаг 314: генерация упомянутым мобильным устройством информации о возобновлении процесса парковки и отправка такой информации в упомянутый автомобиль, если в течение третьего заданного временного интервала от пользователя поступает первая подтверждающая информация в отношении упомянутой информации о запросе возобновления процесса парковки.
На данном шаге предусмотрена возможность генерации информации о возобновлении процесса парковки и отправки такой информации в автомобиль, если в мобильном приложении отображается информация о запросе возобновления процесса парковки и в течение третьего заданного временного интервала от пользователя поступает первая подтверждающая информация в отношении упомянутой информации о запросе возобновления процесса парковки.
Шаг 315: получение упомянутым автомобилем информации о возобновлении парковки, отправленной упомянутым мобильным устройством, генерация команды о восстановлении процесса парковки на основе упомянутой информации о возобновлении парковки и подача упомянутой команды о восстановлении процесса парковки во все связанные системы упомянутого автомобиля для того, чтобы данные системы могли выполнить автоматическую парковку.
На данном шаге предусмотрена возможность получения автомобилем посредством APA ECU информации о возобновлении парковки, отправленной мобильным устройством и свидетельствующей о том, что пользователь подтвердил необходимость возобновить процесс парковки, а также возможность генерации APA ECU команды о восстановлении процесса парковки и подачи такой команды во все связанные системы автомобиля, которые, получив такую команду, на ее основе продолжают выполнять автоматическую парковку, пока процесс автоматической парковки не будет полностью выполнен.
Опционально, на Фиг. 10 представлен интерфейс другого мобильного приложения, упомянутый в примере реализации настоящего раскрытия, где видно, что после завершения процесса автоматической парковки мобильным устройством может быть в мобильном приложении отображена информация о завершении автоматической парковки, которая служит в качестве напоминания пользователю о том, что процесс автоматической парковки завершен.
Опционально, на Фиг. 11 представлен интерфейс другого мобильного приложения, упомянутый в примере реализации настоящего раскрытия, где видно, что во время автоматической парковки автомобиля пользователь может также выбрать в мобильном приложении прекращение автоматической парковки. Как видно на Фиг. 11, после того как пользователь выбирает и подтверждает завершение автоматической парковки, мобильное устройство подает автомобилю сигнал о временном прекращении автоматической парковки, при этом APA ECU и все связанные системы автомобиля приостанавливают процесс автоматической парковки и начинают ожидать последующих указаний. Мобильное приложение может повторно запрашивать подтверждения завершения процесса парковки. Если пользователь при этом по-прежнему выбирает завершение автоматической парковки, то автомобиль завершает процесс автоматической парковки, а если пользователь выбирает возобновление автоматической парковки, то автомобиль продолжает процесс автоматической парковки.
Опционально, если упомянутой текущей информацией о парковке автомобиля является упомянутая информация о прерванной парковке без возможности возобновить процесс парковки, то упомянутый способ также включает в себя:
Шаг 316: генерация упомянутым мобильным устройством информации о завершении парковки и отправка им такой информации в упомянутый автомобиль.
На данном шаге предусмотрена возможность генерации мобильным устройством информации о завершении парковки и отправки им такой информации в автомобиль, так как текущей информацией о парковке автомобиля является информация о прерывании парковки без возможности возобновления процесса парковки, т.е. на данный момент процесс автоматической парковки автомобиля прерван и его восстановление не представляется возможным.
Шаг 317: получение упомянутым автомобилем информации о завершении парковки, отправленной упомянутым мобильным устройством, генерация команды о завершении процесса парковки на основе упомянутой информации о завершении парковки и подача упомянутой команды о завершении процесса парковки во все связанные системы упомянутого автомобиля для того, чтобы данные системы могли завершить процесс автоматической парковки.
На данном шаге предусмотрена возможность получения APA ECU информации о завершении процесса парковки, присылаемой мобильным устройством, генерации автомобилем команды о завершении парковки посредством системы APA ECU и отправки такой команды во все связанные системы автомобиля, которые, получив данную команду, на ее основе завершают процесс автоматической парковки.
Исходя из вышеизложенного, способ автоматической парковки, представляемый в примере реализации настоящего раскрытия и применимый к автомобилям, оборудованным контроллерами системы автоматизированного паркинга, включает в себя: прием введенных пользователем заданных операций посредством контроллера системы автоматизированного паркинга; получение информации о передаче, на которой движется автомобиль; генерацию команды о начале автоматической парковки на основе информации о заданных операциях и информации о передаче и отправку такой команды в мобильное устройство; прием подаваемой мобильным устройством команды на управление процессом автоматической парковки и выполнение в соответствии с такой командой операций, связанных с автоматической парковкой. Согласно примеру реализации настоящего раскрытия, предусмотрена возможность преобразования мобильным устройством во время управления процессом автоматической парковки автомобиля введенной пользователем в мобильное устройство оперативной информации с достаточно большим объемом данных в команду на управление процессом парковки с маленьким объемом данных, которая впоследствии подается только в контроллер системы автоматизированного паркинга в автомобиле с тем, чтобы автомобиль мог выполнить автоматическую парковку. Такая возможность позволяет, с одной стороны, снижать информационную нагрузку на канал связи между мобильным устройством и автомобилем в процессе автоматической парковки, повышать эффективность самого процесса парковки и одновременно с этим расширять функции, при выполнении которых используются коммуникационные данные и ресурсы, а с другой стороны, сокращать объем расчетов, производимых контроллером системы автоматизированного паркинга, кроме того, такая возможность позволяет поддерживать способы ввода пользователем самоопределяемой оперативной информации и повышать комфортность пользователя во время реализации предлагаемого способа.
В данном примере реализации настоящего раскрытия также представлен способ автоматической парковки, основанный на вышеприведенном примере.
На Фиг. 12 представлена технологическая схема взаимодействия по другому способу автоматической парковки с дистанционным управлением, упомянутому в примере реализации настоящего раскрытия, где упомянутый способ автоматической парковки с дистанционным управлением предполагает другой способ автоматической парковки и применяется в ситуациях, когда взаимодействуют друг с другом водитель, мобильное приложение, Блютуз-модуль (Bluetooth Module, BTM) для автомобиля, основной автомобильный блок HU и APA ECU. Данный способ включает в себя:
S1: выбор водителем опции «Парковка с дистанционным управлением».
На данном шаге предусмотрена возможность выбора водителем в основном автомобильном блоке HU режима парковки с дистанционным управлением и дистанционного управления им процессом парковки автомобиля.
S2: подача основным автомобильным блоком HU команды о парковке с дистанционным управлением в APA ECU.
На данном шаге предусмотрена возможность генерации основным автомобильным блоком HU команды о парковке автомобиля с дистанционным управлением после того, как водителем выбрана опция «Парковка с дистанционным управлением», и отправки упомянутой сгенерированной команды в APA ECU.
Говоря конкретнее, команда о парковке с дистанционным управлением выглядит следующим образом: HU_ParkModeReq=Ox2: Select remote parking.
S3: запрашивание начала парковки с дистанционным управлением.
APA ECU, получив команду о парковке с дистанционным управлением, генерирует запрос начала парковки с дистанционным управлением и направляет данный запрос в BTM.
Говоря конкретнее, запрос начала парковки с дистанционным управлением выглядит следующим образом: RmtParkingRequest=Ox1: Request park in.
S4: включение мобильного приложения.
На данном шаге предусмотрена возможность включения водителем мобильного приложения, установленного в мобильном устройстве и применяемого для дистанционного управления парковкой автомобиля.
S5: подключение и аутентификация Блютуз.
На данном шаге предусмотрена возможность подключения мобильным приложением Блютуз к BTM и проведения им процедуры аутентификации.
S6: успешное завершение процедуры аутентификации.
На данном шаге предусмотрена возможность проведения BTM процедуры аутентификации запроса о подключении Блютуз, поданного мобильным приложением, и отправки им информации об успешном завершении данной процедуры в мобильное приложение, чтобы тем самым подтвердить успешное подключение Блютуз для соединения мобильного телефона и автомобиля.
S7: поступление сигнала о подключении мобильного приложения.
На данном шаге предусмотрена возможность отправки BTM в APA ECU информации о подключении мобильного приложения к BTM после проведения им аутентификации запроса о подключении Блютуз, поданного мобильным приложением. Говоря конкретнее, направляемая BTM информация выглядит следующим образом: RmtCtrlCnnctSts=Ox1: Connection.
S8: отправка текстового напоминания.
На данном шаге предусмотрена возможность генерации блоком APA ECU текстового напоминания о подаче запроса подтверждения начала парковки с дистанционным управлением после получения им сигнала о подключении мобильного приложения и отправки блоком APA ECU упомянутого текстового напоминания в BTM.
Говоря конкретнее, текстовое напоминание о подаче запроса подтверждения начала парковки с дистанционным управлением выглядит следующим образом: HAP_TextDisp=Ox34: please confirm to start parking.
S9: переход к интерфейсу управления парковкой.
На данном шаге предусмотрена возможность уведомления BTM мобильного приложения о необходимости перейти к интерфейсу управления парковкой после получения им текстового напоминания о подаче запроса подтверждения начала парковки с дистанционным управлением.
S10: сообщение об отображении в мобильном приложении интерфейса управления парковкой.
На данном шаге предусмотрена возможность перехода мобильным приложением к интерфейсу управления парковкой и сообщения модулю BTM о том, что в мобильном приложении уже открыт интерфейс управления парковкой.
S11: непрерывное проскальзывание пользователем пальцем по экрану мобильного телефона.
На данном шаге предусмотрена возможность для пользователя непрерывно проскальзывать пальцем по экрану мобильного телефона после того, как он видит в мобильном приложении интерфейс управления парковкой.
S12: непрерывное проскальзывание пользователем пальцем по экрану мобильного телефона.
На данном шаге предусмотрена возможность приема мобильным приложением информации о том, что пользователь непрерывно проскальзывает пальцем по экрану мобильного телефона, и отправки им данной информации в BTM.
S13: отправка информации о контроле действий пользователя.
На данном шаге предусмотрена возможность отправки BTM информации о контроле действий пользователя в APA ECU, причем под действиями пользователя подразумеваются проскальзывающие движения пальцев пользователя по экрану мобильного телефона.
Говоря конкретнее, информация о контроле действий пользователя выглядит следующим образом: RmtReqParking=Ox1: user sliding circle.
S14: отправка информации о начале подготовки к парковке.
На данном шаге предусмотрена возможность генерации блоком APA ECU информации о разрешении начинать подготовку автомобиля к парковке после получения им информации о контроле действий пользователя и отправки упомянутой информации о разрешении начинать подготовку автомобиля к парковке в BTM.
Говоря конкретнее, упомянутая информация о начале подготовки к парковке выглядит следующим образом: HAP_TextDisp=Ox12: Auto parking be ready to break.
S15: переход в интерфейс, в котором отображается процесс парковки.
На данном шаге предусмотрена возможность уведомления BTM мобильного приложения о необходимости перейти в интерфейс, в котором отображается процесс парковки, после получения им информации о завершении этапа подготовки к парковке автомобиля.
S16: въезд в парковочное место.
На данном шаге предусмотрена возможность управления блоком APA ECU процессом парковки автомобиля, совершаемым связанными системами автомобиля.
S17: отправка текстового напоминания об успешном завершении парковки.
На данном шаге предусмотрена возможность генерации блоков APA ECU текстового напоминания об успешном завершении парковки после того, как автомобиль припаркован, и отправки им упомянутого текстового напоминания в BTM.
Говоря конкретнее, упомянутое текстовое напоминание об успешном завершении процесса парковки автомобиля выглядит следующим образом: Ox19: Parking finished.
S18: переход к интерфейсу, в котором отображается информация об успешном завершении парковки, запрашивание у водителя подтверждения необходимости глушить двигатель.
На данном шаге предусмотрена возможность уведомления BTM мобильного приложения о необходимости перейти к интерфейсу, в котором отображается информация об успешном завершении парковки, после получения текстового напоминания об успешном завершении процесса парковки автомобиля и запрашивания им у водителя в данном интерфейсе подтверждения необходимости глушить двигатель.
S19: подтверждение водителем необходимости глушить двигатель.
На данном шаге предусмотрена возможность подтверждения водителем необходимости глушения двигателя в мобильном приложении в интерфейсе, где отображается информация об успешном завершении процесса парковки.
S20: запрашивание глушения двигателя.
На данном шаге предусмотрена возможность отправки мобильным приложением запроса о глушении двигателя в BTM после получения от водителя подтверждения необходимости глушить двигатель.
S21: глушение двигателя, поднятие окон, блокировка дверей.
На данном шаге предусмотрена возможность управления BTM процессами глушения двигателя, поднятия окон и блокировки дверей после получения от мобильного приложения информации о запросе глушения двигателя.
В данном примере реализации настоящего раскрытия также представлен способ автоматической парковки, основанный на вышеприведенном примере.
На Фиг. 13 представлена схема выполнения операций по способу автоматической парковки с дистанционным управлением, упомянутому в примере реализации настоящего раскрытия, иными словами, на Фиг. 13 схематически изображен процесс выезда автомобиля с места парковки с дистанционным управлением, при этом в мобильном приложении имеется множество интерфейсов, а именно:
A1: интерфейс инициализации мобильного приложения.
В данном интерфейсе отображается процесс инициализации мобильного приложения, с помощью которого мобильное устройство дистанционно управляет процессом выезда автомобиля с места парковки, причем здесь настроено меню с опциями «Выезд с места парковки с дистанционным управлением» и «Парковка с дистанционным управлением», между которыми пользователь может делать выбор.
A2: интерфейс выбора дистанционного управления.
После того, как пользователем в интерфейсе инициализациии мобильного приложения выбрана опция «Выезд с места парковки с дистанционным управлением» в мобильном приложении открывается интерфейс A2, в котором пользователь может повторно подтвердить, войти ли в меню выезда с места парковки с дистанционным управлением. В случае выбора варианта «Да» в мобильном приложении открывается интерфейс A3, а если выбран вариант «Нет», то в мобильном приложении происходит возврат к интерфейсу A1.
A3: интерфейс отображения процесса самопроверки системы.
После того, как пользователем в интерфейсе A2 выбрана опция «Выезд с места парковки с дистанционным управлением», во всех системах автомобиля начинается самопроверка, результат которой отображается в интерфейсе A3, причем среди пунктов результата упомянутой самопроверки может быть как ошибка самого блока APA ECU, так и ошибка всех связанных систем.
Говоря конкретнее, если в результате самопроверки выявляется ошибка в автомобиле, то в мобильном приложении снова отображается интерфейс А1, а если в результате самопроверки никакой ошибки не выявляется, то в мобильном приложении отображается интерфейс A4, A5 или A6.
A4: интерфейс отображения напоминания о возможности беспрепятственного проезда автомобиля вперед.
Если автомобилем обнаруживается, что он может беспрепятственно выехать с места парковки, поехав вперед, т.е. если пользователь в состоянии самостоятельно вывести автомобиль с места парковки без надобности запускать функцию дистанционного управления выездом с места парковки, то открывается интерфейс A4.
A5: интерфейс выбора направления выезда с места парковки.
В случае если автомобилем обнаруживается несколько направлений, в которых он может выехать с места парковки, то данные направления отображаются в интерфейсе A5 и пользователь может выбрать одно из них.
A6: интерфейс для подтверждения направления выезда с места парковки.
В случае если автомобилем обнаруживается одно направление, в котором он может выехать с места парковки, причем такое направление предусматривает выезд не передним ходом, то данное направление отображается в интерфейсе A5, а пользователь видит напоминание о необходимости подтвердить данное направление.
A7: интерфейс ввода пользовательских операций.
После подтверждения пользователем направления выезда с места парковки отображается интерфейс A7, в котором пользователь видит напоминание о необходимости ввода пользовательских операций.
В данном примере реализации настоящего раскрытия также представлено устройство для реализации способа автоматической парковки, основанное на вышеприведенном примере.
На Фиг. 14 представлен чертеж конструкции устройства для реализации способа автоматической парковки, упомянутого в примере реализации настоящего раскрытия. Данная конструкция может включать в себя следующие модули:
Первый модуль приема 401, предназначенный для приема введенной пользователем оперативной информации при поступлении команды о начале выполнения автоматической парковки;
Первый модуль генерации 402, предназначенный для генерации команды на управление процессом парковки на основе упомянутой оперативной информации;
Опционально, упомянутый первый модуль генерации 402 может включать в себя:
Первый подмодуль преобразования, предназначеннный для преобразования части оперативной информации, полученной в течение первого заданного временного интервала, в упомянутую команду на управление процессом парковки в соответствии с установленными правилами, причем такое преобразование производится через каждый промежуток времени, равный упомянутому первому заданному временному интервалу, на протяжении всего процесса приема упомянутой оперативной информации.
Опционально, упомянутый первый модуль генерации 402 также может включать в себя:
Второй подмодуль преобразования, предназначенный для преобразования упомянутой оперативной информации в упомянутую команду на управление процессом парковки в соответствии с установленными правилами после получения в полном объеме упомянутой оперативной информации.
Опционально, к упомянутым установленным правилам относятся следующие правила:
Если упомянутая оперативная информация соответствует первой заданной операции, а время, в течение которого упомянутая оперативная информация и первая заданная операция соответствуют друг другу, больше или равно второму заданному временному интервалу, то упомянутая сгенерированная команда на управление процессом парковки рассматривается как информация о продолжении автоматизированного паркинга;
Если упомянутая оперативная информация не соответствует первой заданной операции или время, в течение которого упомянутая оперативная информация и первая заданная операция соответствуют друг другу, меньше упомянутого второго заданного временного интервала, то упомянутая сгенерированная команда на управление процессом парковки рассматривается как информация о прерывании автоматизированного паркинга.
Опционально, упомянутый второй подмодуль преобразования может включать в себя:
Преобразующий блок, предназначенный для преобразования упомянутой оперативной информации в упомянутую команду на управление процессом парковки в соответствии с упомянутыми установленными правилами после получения в полном объеме упомянутой оперативной информации, если пропускная способность канала связи между упомянутым мобильным устройством и упомянутым автомобилем меньше пороговой величины пропускной способности.
Опционально, к упомянутой оперативной информации относится любой из следующих типов информации: информация о жестах по экрану упомянутого мобильного устройства, информация о нажатиях клавиш, информация о голосовом управлении и информация о тряске упомянутого мобильного устройства.
Опционально, в упомянутом мобильном устройстве настроены опции выбора упомянутой оперативной информации и предварительно заданы траектории совершения операций, соответствующие упомянутой оперативной информации, причем к упомянутым опциям выбора относятся: опция управления жестами, опция управления нажатиями клавиш, опция голосового управления и опция управления тряской.
Опционально, если упомянутой оперативной информацией является информация о движении пальцев по экрану упомянутого мобильного устройства, а упомянутыми предварительно заданными траекториями совершения операций являются траектории жестов, то упомянутый первый модуль генерации 402 также включает в себя:
Подмодуль отображения, предназначенный для отображения на экране упомянутого мобильного устройства предварительно заданных траекторий жестов и напоминаний, причем упомянутые напоминания служат для оповещения пользователя о необходимости ввести оперативную информацию;
Первый подмодуль генерации, предназначенный для установления упомянутой сгенерированной команды на управление процессом парковки в качестве информации о продолжении автоматизированного паркинга в соответствии с установленными правилами, если поступает упомянутая оперативная информация и она соответствует упомянутым предварительно заданным траекториям жестов;
Второй подмодуль генерации, предназначенный для установления упомянутой сгенерированной команды на управление процессом парковки в качестве информации о прерывании автоматизированного паркинга в соответствии с упомянутыми установленными правилами, если поступает упомянутая оперативная информация и она не соответствует упомянутым предварительно заданным траекториям жестов.
Опционально, упомянутое устройство также включает в себя:
Второй модуль приема, предназначенный для приема и отображения текущей информации о парковке, присылаемой упомянутым автомобилем, причем под упомянутой текущей информацией о парковке понимается информация о состоянии всех связанных систем упомянутого автомобиля.
Опционально, к упомянутой текущей информации о парковке автомобиля относится любой из следующих типов информации: информация о нормальной парковке, информация о прерванной парковке с возможностью возобновить процесс парковки и информация о прерванной парковке без возможности возобновить процесс парковки.
Опционально, если упомянутой текущей информацией о парковке автомобиля является упомянутая информация о прерванной парковке с возможностью возобновить процесс парковки, то упомянутое утсройство также включает в себя:
Второй модуль генерации, предназначенный для генерации информации о запросе возобновления процесса парковки и отображения такой информации, если упомянутой текущей информацией о парковке автомобиля является информация о нормальной парковке;
Третий модуль генерации, предназначенный для генерации информации о возобновлении процесса парковки и отправки такой информации в упомянутый автомобиль, если в течение третьего заданного временного интервала от пользователя поступает первая подтверждающая информация в отношении упомянутой информации о запросе возобновления процесса парковки.
Опционально, если упомянутой текущей информацией о парковке автомобиля является упомянутая информация о прерванной парковке без возможности возобновить процесс парковки, то упомянутое утсройство также включает в себя:
Четвертый модуль генерации, предназначенный для генерации информации о завершении парковки и отправки такой информации в упомянутый автомобиль.
Упомянутое устройство также включает в себя первый модуль отправки 403, предназначенный для отправки упомянутой команды на управление процессом парковки в автомобиль для выполнения упомянутым автомобилем операций, связанных с автоматической парковкой, в соответствии с упомянутой командой на управление процессом парковки.
Исходя из вышеизложенного, устройство для реализации способа автоматической парковки, представляемый в примере реализации настоящего раскрытия, включает в себя: прием введенных пользователем заданных операций посредством контроллера системы автоматизированного паркинга; получение информации о передаче, на которой движется автомобиль; генерацию команды о начале автоматической парковки на основе информации о заданных операциях и информации о передаче и отправку такой команды в мобильное устройство; прием подаваемой мобильным устройством команды на управление процессом автоматической парковки и выполнение в соответствии с такой командой операций, связанных с автоматической парковкой. Согласно примеру реализации настоящего раскрытия, предусмотрена возможность преобразования мобильным устройством во время управления процессом автоматической парковки автомобиля введенной пользователем в мобильное устройство оперативной информации с достаточно большим объемом данных в команду на управление процессом парковки с маленьким объемом данных, которая впоследствии подается только в контроллер системы автоматизированного паркинга в автомобиле с тем, чтобы автомобиль мог выполнить автоматическую парковку. Такая возможность позволяет, с одной стороны, снижать информационную нагрузку на канал связи между мобильным устройством и автомобилем в процессе автоматической парковки, повышать эффективность самого процесса парковки и одновременно с этим расширять функции, при выполнении которых используются коммуникационные данные и ресурсы, а с другой стороны, сокращать объем расчетов, производимых контроллером системы автоматизированного паркинга, кроме того, такая возможность позволяет поддерживать способы ввода пользователем самоопределяемой оперативной информации и повышать комфортность пользователя во время реализации предлагаемого способа.
На Фиг. 15 представлен чертеж конструкции другого устройства для реализации способа автоматической парковки, упомянутого в примере реализации настоящего раскрытия. В данную конструкцию могут входить следующие модули:
Третий модуль приема 501, предназначенный для приема вводимых пользователем заданных операций посредством упомянутого контроллера системы автоматизированного паркинга;
Модуль получения информации 502, предназначенный для получения информации о передаче, на которой движется упомянутый автомобиль;
Второй модуль отправки 503, предназначенный для генерации команды о начале автоматической парковки на основе упомянутой информации о заданных операциях и упомянутой информации о передаче и отправки такой команды в мобильное устройство для того, чтобы мобильное устройство, получив команду о начале автоматической парковки и оперативную информацию, введенную пользователем, на основе данной информации сгенерировало команду на управление процессом парковки и отправило такую команду в автомобиль;
Четвертый модуль приема 504, предназначенный для получения от упомянутого мобильного устройства команды на управление процессом парковки и выполнения в соответствии с такой командой операций, связанных с автоматической парковкой.
Опционально, упомянутое устройство также включает в себя:
Пятый модуль генерации, предназначенный для приема от связанных систем упомянутого автомобиля информации о состоянии, генерации текущей информации о парковке автомобиля и отправки упомянутой текущей информации о парковке автомобиля в мобильное устройство.
Опционально, к упомянутой текущей информации о парковке автомобиля относится любой из следующих типов информации: информация о нормальной парковке, информация о прерванной парковке с возможностью возобновить процесс парковки и информация о прерванной парковке без возможности возобновить процесс парковки.
Опционально, если упомянутой текущей информацией о парковке автомобиля является упомянутая информация о прерванной парковке с возможностью возобновить процесс парковки, то упомянутое утсройство также включает в себя:
Шестой модуль генерации, предназначенный для получения информации о возобновлении парковки, отправленной упомянутым мобильным устройством, генерации команды о восстановлении процесса парковки на основе упомянутой информаии о возобновлении парковки и подачи упомянутой команды о восстановлении процесса парковки во все связанные системы упомянутого автомобиля для того, чтобы данные системы могли выполнить автоматическую парковку.
Опционально, если упомянутой текущей информацией о парковке автомобиля является упомянутая информация о прерванной парковке без возможности возобновить процесс парковки, то упомянутое утсройство также включает в себя:
Седьмой модуль генерации, предназначенный для получения информации о завершении парковки, отправленной упомянутым мобильным устройством, генерации команды о завершении процесса парковки на основе упомянутой информации о завершении парковки и подачи упомянутой команды о завершении процесса парковки во все связанные системы упомянутого автомобиля для того, чтобы данные системы могли завершить процесс автоматической парковки.
Опционально, второй модуль отправки 503 может включать в себя:
Подмодуль получения информации, предназначенный для получения информации об окружающей обстановке, присланной датчиками автомобиля, генерации эффективной информации о парковочных местах и получения информации о выборе пользователем той или иной из упомянутой эффективной информации о парковочных местах; далее, для получения автомобилем информации о скорости своего движения и генерации информации о том, что упомянутый автомобиль находится в неподвижном состоянии, если скорость его движения составляет 0 км/ч;
Третий подмодуль генерации, предназначенный для генерации и отображения сообщения с напоминанием о необходимости торможения автомобиля;
Четвертый подмодуль генерации, предназначенный для получения информации о скорости движения автомобиля и генерации информации о том, что упомянутый автомобиль находится в неподвижном состоянии, если скорость его движения составляет 0 км/ч;
Пятый подмодуль генерации, предназначенный для генерации упомянутой команды о начале автоматической парковки в соответствии с упомянутой информацией о заданных операциях, упомянутой информацией о передаче, упомянутой информацией о выборе пользователя и упомянутой информацией о неподвижном состоянии автомобиля после получения информации о неподвижном состоянии автомобиля и информации о выборе пользователем той или иной из упомянутой эффективной информации о парковочных местах, а также для последующей подачи упомянутой команды о начале автоматической парковки в мобильное устройство.
Исходя из вышеизложенного, устройство для реализации способа автоматической парковки, представляемый в примере реализации настоящего раскрытия, включает в себя: прием введенных пользователем заданных операций посредством контроллера системы автоматизированного паркинга; получение информации о передаче, на которой движется автомобиль; генерацию команды о начале автоматической парковки на основе информации о заданных операциях и информации о передаче и отправку такой команды в мобильное устройство; прием подаваемой мобильным устройством команды на управление процессом автоматической парковки и выполнение в соответствии с такой командой операций, связанных с автоматической парковкой. Согласно примеру реализации настоящего раскрытия, предусмотрена возможность преобразования мобильным устройством во время управления процессом автоматической парковки автомобиля введенной пользователем в мобильное устройство оперативной информации с достаточно большим объемом данных в команду на управление процессом парковки с маленьким объемом данных, которая впоследствии подается только в контроллер системы автоматизированного паркинга в автомобиле с тем, чтобы автомобиль мог выполнить автоматическую парковку. Такая возможность позволяет, с одной стороны, снижать информационную нагрузку на канал связи между мобильным устройством и автомобилем в процессе автоматической парковки, повышать эффективность самого процесса парковки и одновременно с этим расширять функции, при выполнении которых используются коммуникационные данные и ресурсы, а с другой стороны, сокращать объем расчетов, производимых контроллером системы автоматизированного паркинга, кроме того, такая возможность позволяет поддерживать способы ввода пользователем самоопределяемой оперативной информации и повышать комфортность пользователя во время реализации предлагаемого способа.
Технические работники данной области могут легко понять, что для удобства и упрощения процесса описания конкретные принципы действия вышеперечисленных систем, устройств и блоков аналогичны принципам, приведенным в примере реализации представляемого настоящим раскрытием способа, и в дальнейшем не будут повторно описываться.
Приведенный выше пример является примером оптимального варианта применения настоящего раскрытия, но не ставит каких-либо границ в его реализации. Любые изменения, адекватные замены или доработки, проделанные с настоящим раскрытием без нарушения его основной идеи и принципов, являются объектами патентных прав и подлежат охране в рамках настоящей заявки.
Приведенный выше пример является лишь конкретным примером реализации настоящего раскрытия и не ставит каких-либо границ в его реализации. Любые изменения или замены, до которых могут додуматься технические работники, хорошо осведомленные в данной технологической области, и которые не выходят за пределы технической сферы настоящего раскрытия, являются объектами патентных прав и подлежат охране в рамках настоящей заявки, в связи с чем в качестве границ патентных прав в отношении настоящего раскрытия должны быть взяты границы патентных прав в отношении приведенной в настоящей заявке Формулы изобретения.
Вышеописанный пример реализации устройства служит лишь в качестве средства наглядности, причем под разделением элементов, описанных как отдельные части, может иметься в виду как физическое, так и нефизическое разделение, элементами, служащими для отображения блоков, могут быть как физические, так и нефизические блоки, т.е. элементы могут находиться в одном месте, а могут и быть распределены по разным сетевым блокам. Задачи, поставленные данным примером реализации раскрытия, могут выполняться с применением всех или части модулей, выбранных в соответствии с фактическими потребностями реализующего. Технические работники данной области могут без созидательного труда понять и реализовать данный пример.
Примеры реализации различных частей настоящего раскрытия могут осуществляться посредством аппаратного обеспечения или модулей программного обеспечения, функционирующих в одном или нескольких процессорах, или же одновременно посредством и того, и другого. Технические работники данной сферы должны понимать, что все или часть функций всех или части элементов вычислительно-обрабатывающего оборудования, представленного в примере реализации настоящего раскрытия, могут на практике выполняться микропроцессорами или цифровыми сигнальными процессорами (DSP). Кроме того, в рамках настоящего раскрытия также могут быть реализованы программы (например, компьютерные программы и их продукты) всех или части оборудования или устройств, используемых для реализации описываемого в настоящей заявке способа. Такие программы для реализации настоящего раскрытия могут храниться в машинно-считываемой среде или быть в форме одного или множества сигналов, которые можно скачать с Интернет сайтов, а также предоставить на носителях сигналов или в любой иной форме.
Например, на Фиг. 16 представлено вычислительно-обрабатывающее оборудование, с помощью которого реализуется способ, представляемый настоящим раскрытием. Традиционно такое вычислительно-обрабатывающее оборудование состоит из процессора 1010 и компьютерной программы или машинно-считываемой среды в виде запоминающего устройства 1020. Запоминающим устройством 1020 может служить электронное запоминающее устройство, такое как флэш-память, EEPROM (электрически стираемое перепрограммируемое постоянное запоминающее устройство), EPROM (полупроводниковое запоминающее устройство для программирования), жесткий диск или ROM (постоянное запоминающее устройство). В запоминающем устройстве 1020 имеется пространство 1030 для накопления программных кодов 1031, используемых для реализации любых из шагов применения вышеописанного способа. Например, пространство 1030 для накопления программных кодов может содержать в себе программные коды 1031, используемые для реализации каждого шага применения предложенного способа. Данные программные коды могут быть считаны или введены из одного или нескольких продуктов компьютерных программ в один или несколько продуктов компьютерных программ, к которым относятся такие носители программных кодов, как жесткие диски, компакт-диски (CD), карты памяти или магнитные диски. Чаще всего в качестве такого продукта компьютерной программы используется портативный или фиксированный запоминающий блок, проиллюстрированный на Фиг. 17. В таком запоминающем блоке может быть тот же сегмент или пространство для накопления, подобный запоминающему устройству 1020 в вычислительно-обрабатывающем оборудовании, представленном на Фиг. 16. Программные коды могут быть соответствующим образом сжаты. Обычно запоминающие блоки содержат в себе машинно-считываемые коды 1031’, т. е. коды, считываемые процессорами, подобными процессору 1010. Обрабатывая эти коды, вычислительно-обрабатывающее оборудование реализует все шаги применения вышеописанного способа.
Выражения «пример реализации» или «один или много примеров реализации», встречающиеся в тексте, означают, что особые признаки, структуры или характеристики, собираемые в описании примера/примеров реализации, объединены по меньшей мере в один пример реализации настоящего раскрытия. Кроме того, следует обратить внимание на то, что встречающееся в тексте выражение «в примере реализации» не означает, что существует только один такой пример и речь идет в каждом случае об одном и том же примере.
В настоящей заявке приведено множество конкретных деталей, однако допустимо, если варианты применения объектов настоящего раскрытия будут реализоваться без учета таких деталей. Для того, чтобы не усложнять процесс понимания содержания настоящей заявки, в примере реализации представленного в ней раскрытия не приведены в подробностях общеизвестные способы, конструкции и технологии.
Никакие референтные символы, заключенные в скобки в пунктах Формулы изобретения, не должны использоваться в качестве критериев для установления ограничений в ее отношении. Выражение «состоять из», или «содержать в себе», не исключает возможность существования компонентов или операций, отличных от тех, что перечислены в Формуле изобретения. Называние того или иного компонента в единственном числе вовсе не означает, что более не существует других подобных компонентов. Настоящее раскрытие может быть реализовано посредством аппаратуры с различными компонентами и компьютера с подходящим языком программирования. Различные установки, перечисленные в пунктах Формулы изобретения, могут быть представлены посредством одной и той же аппаратуры. Выражения «во-первых», «во-вторых», «в-третьих» и т. д. не указывают на какую-либо последовательность. Такие выражения могут быть поняты как наименования.
Напоследок следует отметить, что данный пример реализации служит лишь для описания технических решений, представленных в настоящем раскрытии, и вовсе не ставят на них какие-либо ограничения. Несмотря на то, что в изложенном выше примере реализации дано детальное описание настоящего раскрытия, рядовые технические работники данной области должны понимать, что они могут вносить в технические решения, представленные в вышеизложенном примере реализации, те или иные изменения или производить адекватную замену части технических особенностей, если при таких изменениях или заменах не исчезает сущность и не происходит выход за пределы тех технических решений, которые предлагает приведенный в настоящей патентной заявке пример реализации раскрытия.
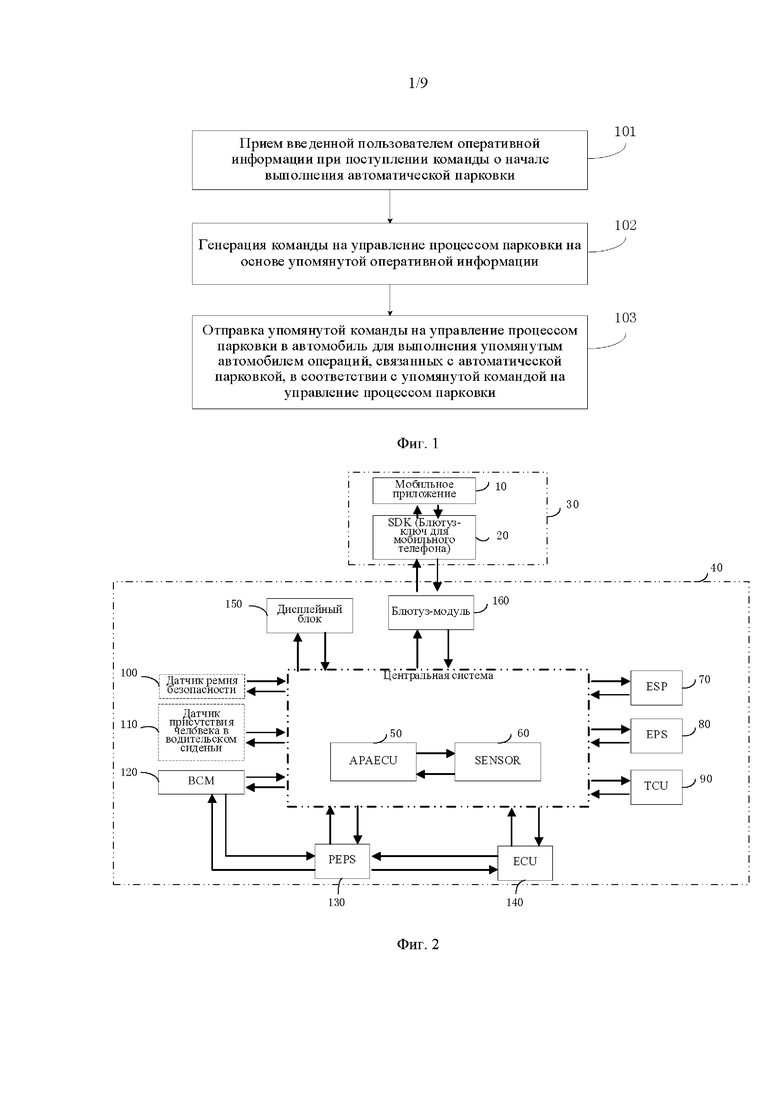
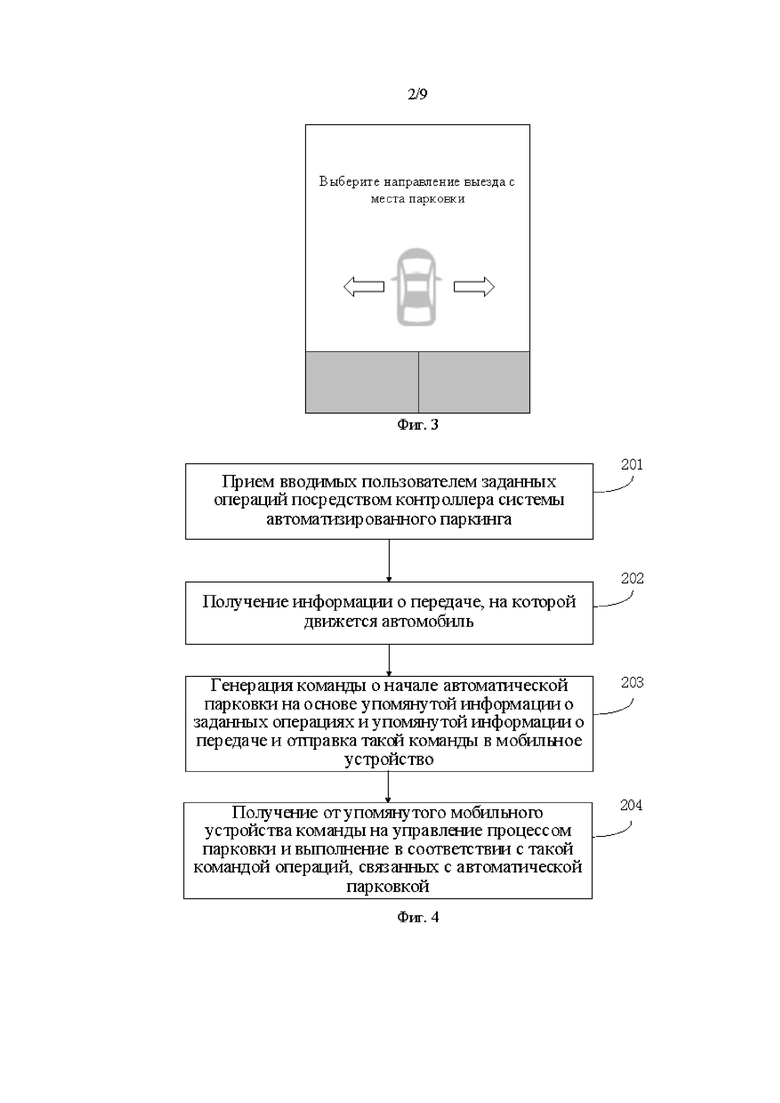
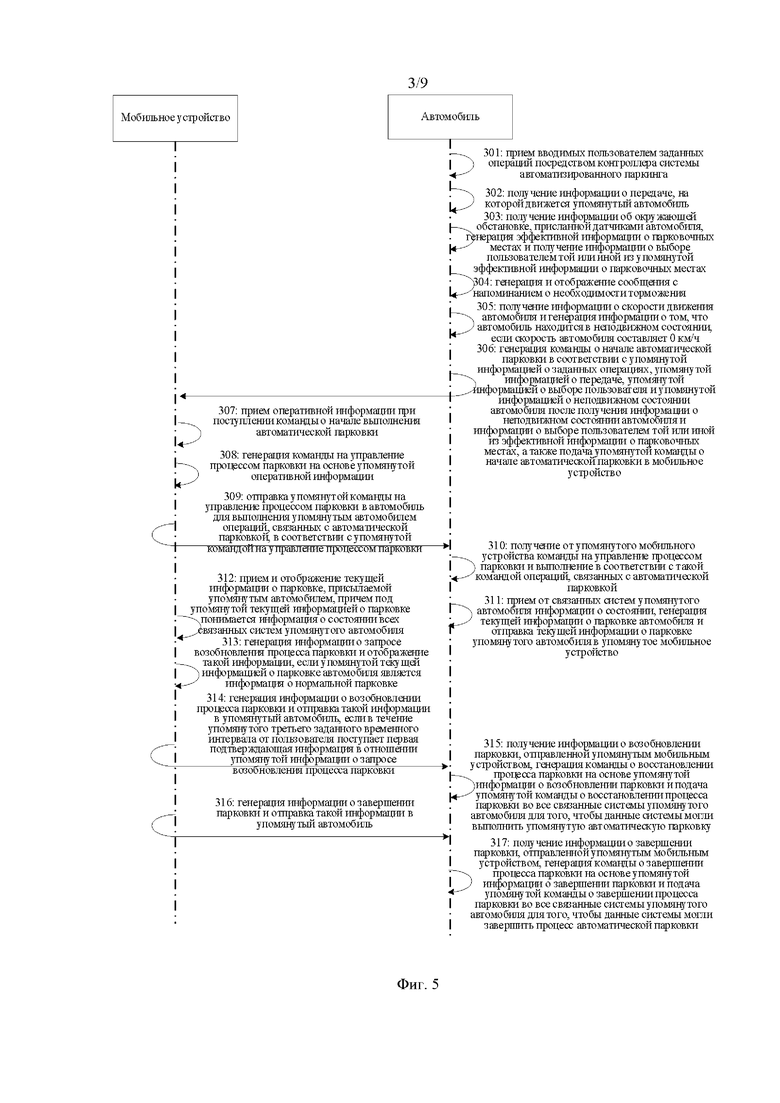
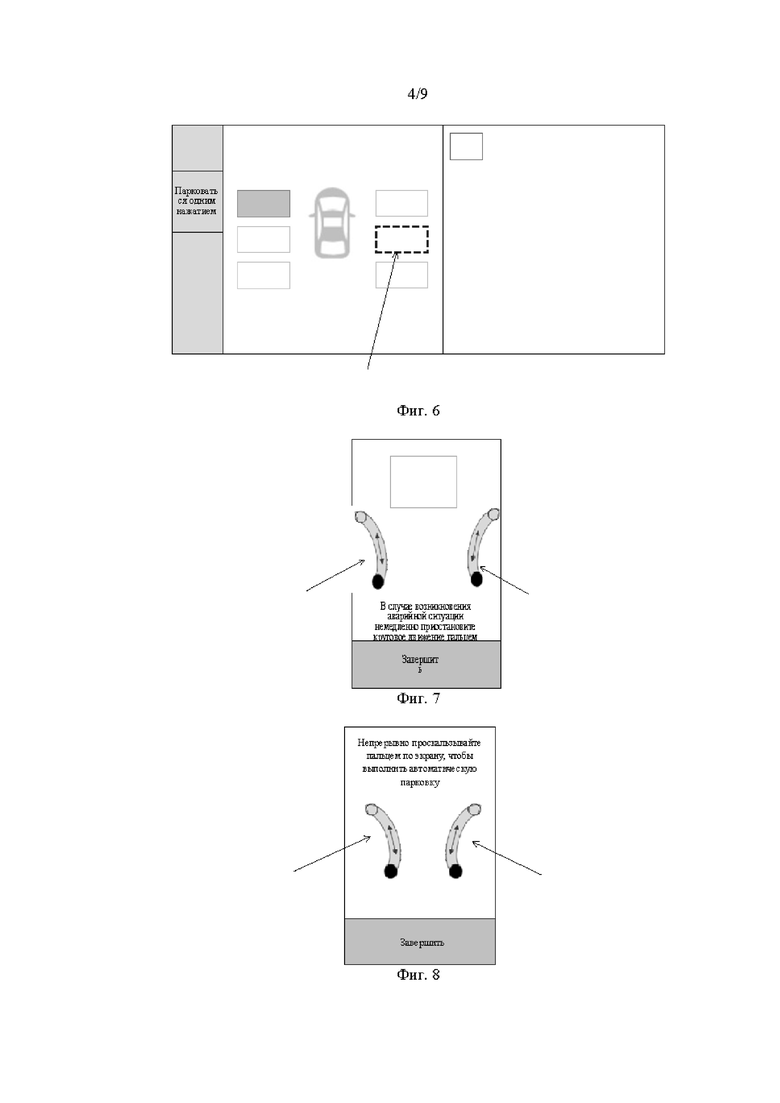
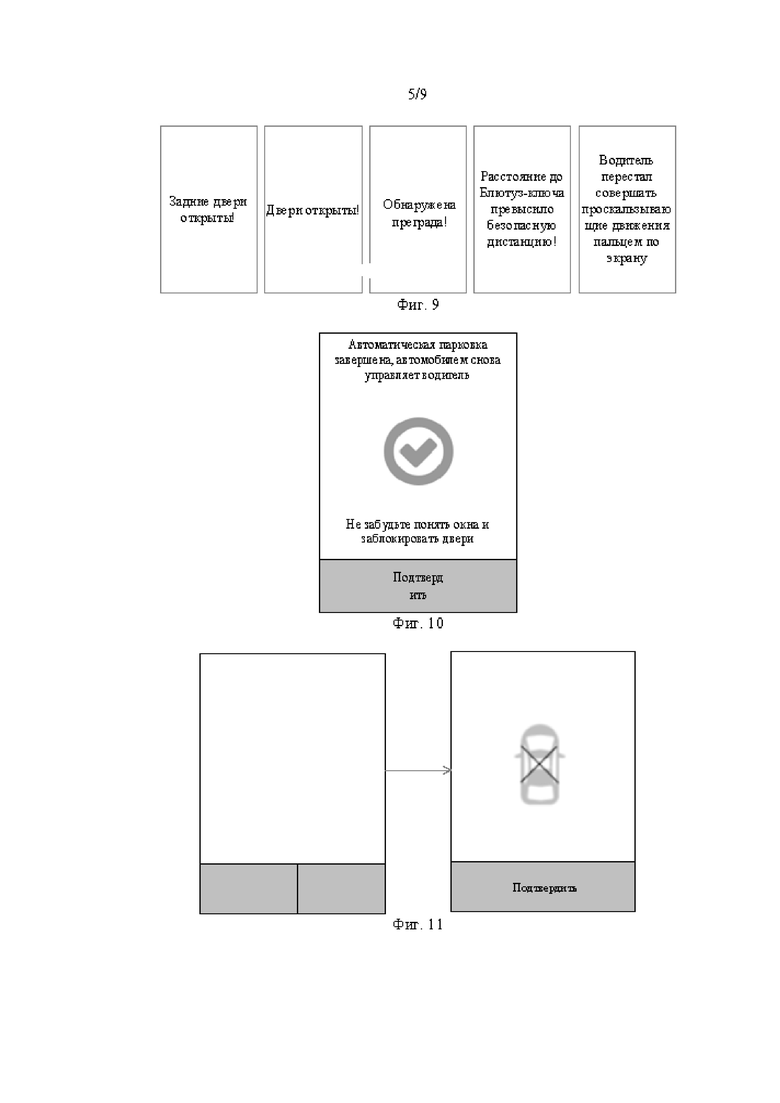
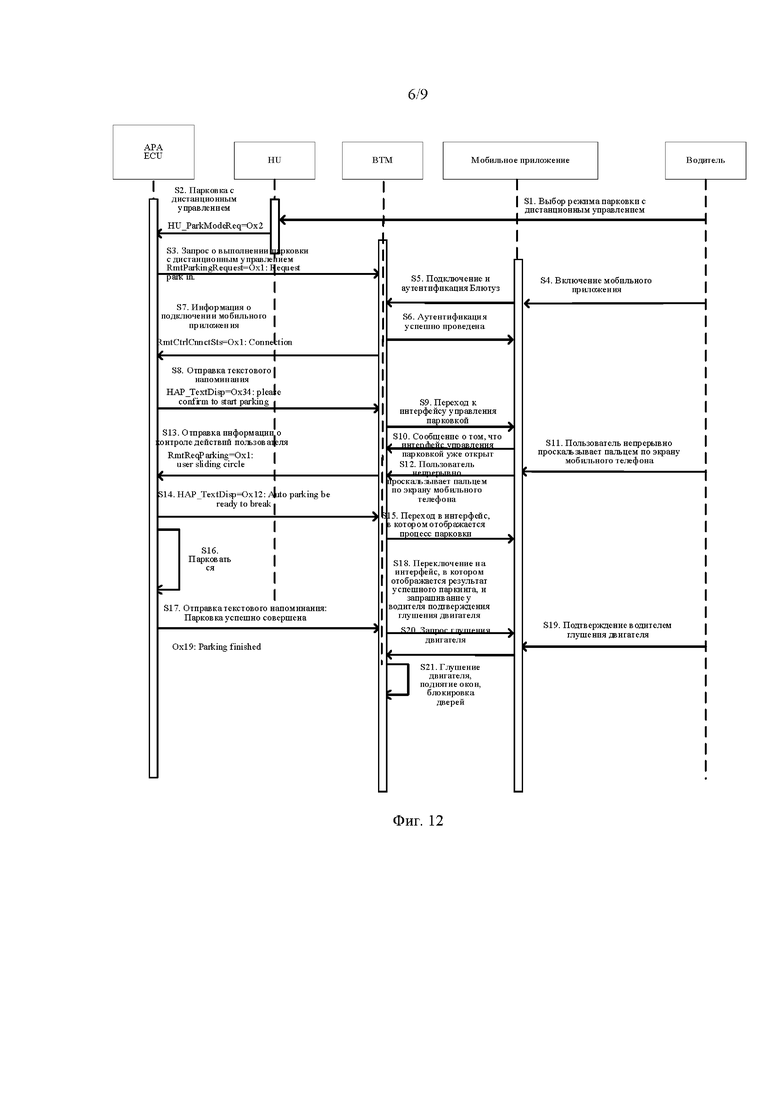
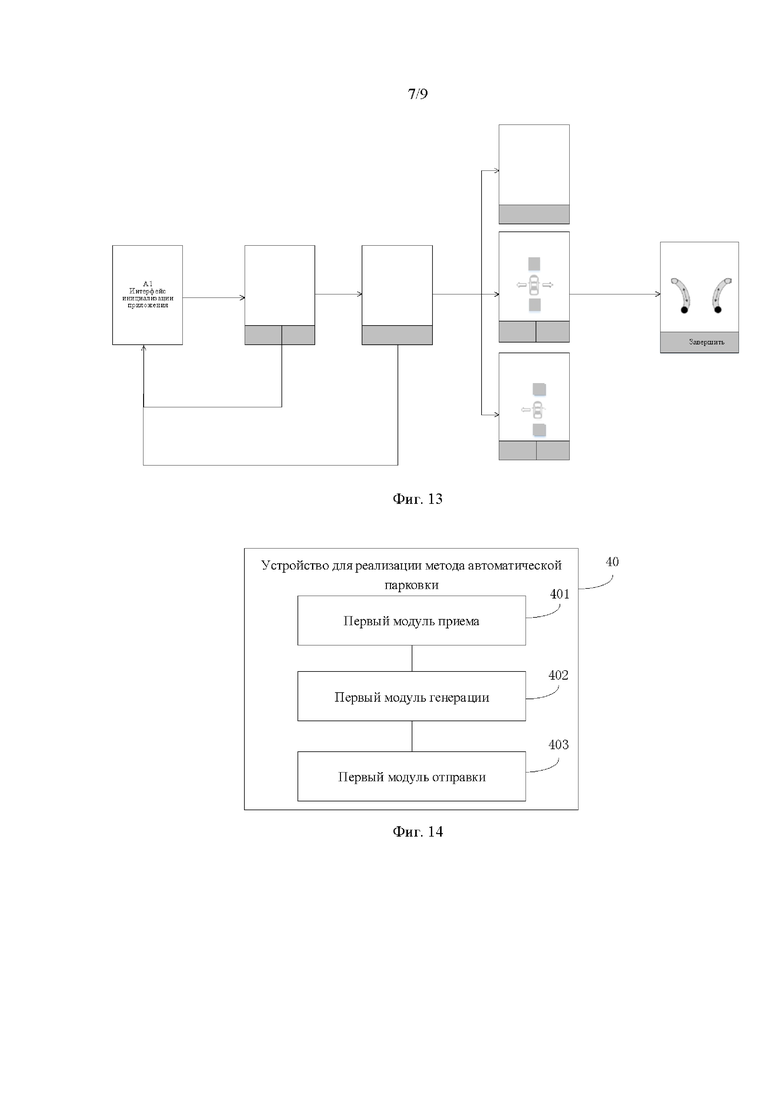
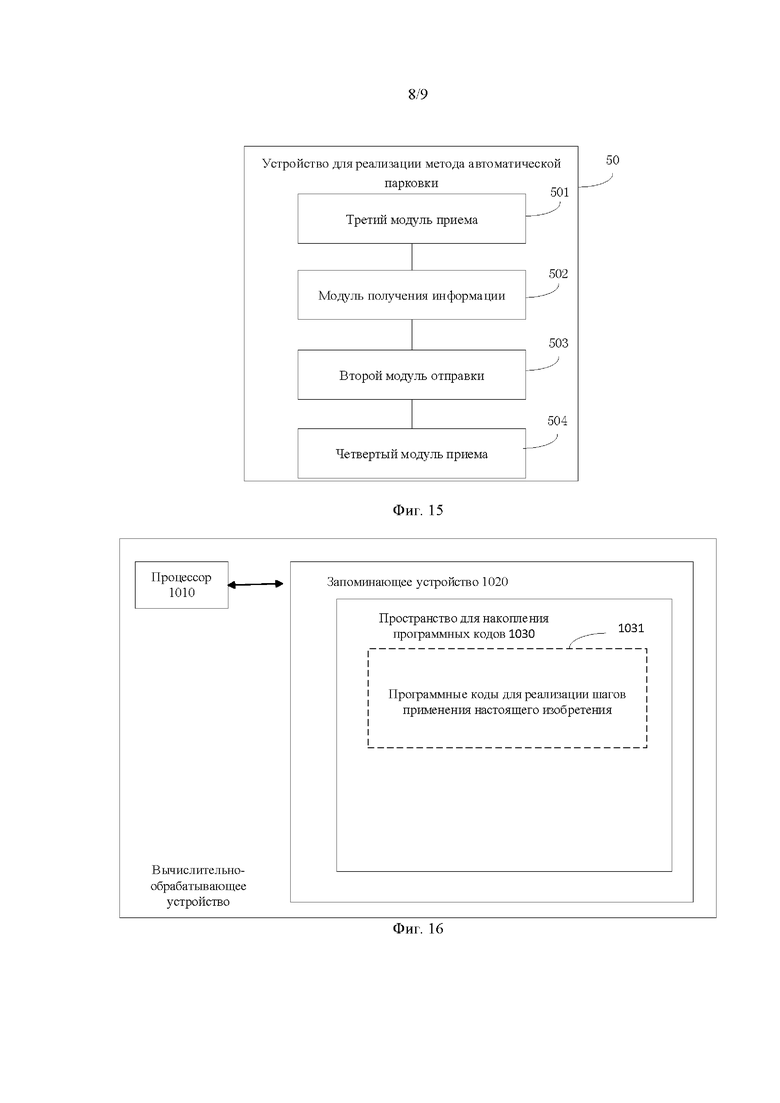
Группа изобретений относится к области автомобилестроения, в частности к способу и устройству для автоматической парковки. Устройство для автоматической парковки, применимое к мобильным устройствам, включает в себя модуль приема, предназначенный для приема вводимой пользователем оперативной информации при поступлении команды о начале автоматической парковки, модуль генерации, предназначенный для генерации команды на управление процессом парковки на основе оперативной информации, модуль отправки, предназначенный для отправки в автомобиль упомянутой команды на управление процессом парковки для того, чтобы автомобиль мог выполнить автоматическую парковку по такой команде. Достигается снижение информационной нагрузки на канал связи между мобильным устройством и автомобилем в процессе автоматической парковки, повышение эффективности процесса автоматической парковки и одновременно с этим расширение функций, при выполнении которых используются коммуникационные данные и ресурсы. 6 н. и 14 з.п. ф-лы, 17 ил.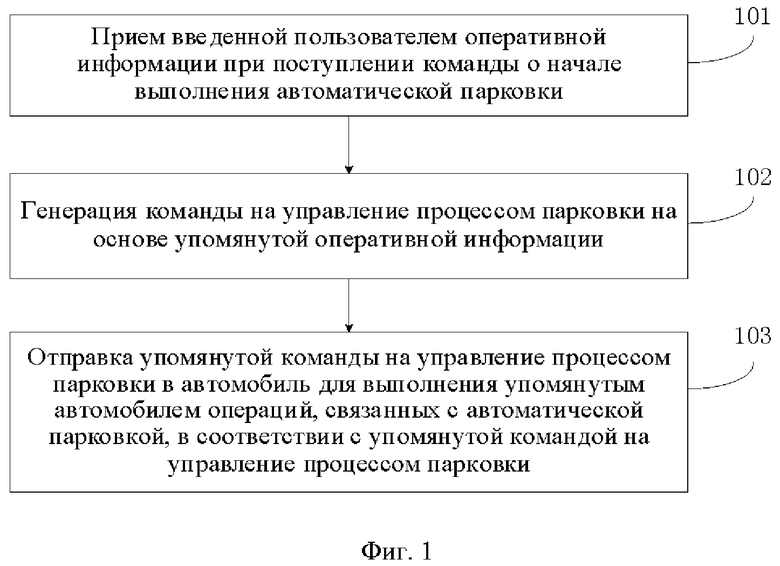
1. Способ автоматической парковки, применимый к мобильным устройствам и отличающийся тем, что включает в себя:
прием введенной пользователем оперативной информации при поступлении команды о начале выполнения автоматической парковки;
генерацию команды на управление процессом парковки на основе упомянутой оперативной информации;
отправку упомянутой команды на управление процессом парковки в автомобиль для выполнения упомянутым автомобилем операций, связанных с автоматической парковкой, в соответствии с упомянутой командой на управление процессом парковки, причем
если упомянутой оперативной информацией является информация о движении пальцев по экрану упомянутого мобильного устройства, а упомянутыми предварительно заданными траекториями совершения операций являются траектории жестов, то упомянутый этап, на котором на основе упомянутой оперативной информации генерируется команда на управление процессом парковки, включает в себя:
отображение упомянутых предварительно заданных траекторий жестов и напоминаний, причем упомянутые напоминания служат для оповещения пользователя о необходимости ввести оперативную информацию;
установление упомянутой сгенерированной команды на управление процессом парковки в качестве информации о продолжении автоматизированного паркинга в соответствии с установленными правилами, если поступает упомянутая оперативная информация и она соответствует упомянутым предварительно заданным траекториям жестов;
установление упомянутой сгенерированной команды на управление процессом парковки в качестве информации о прерывании автоматизированного паркинга в соответствии с упомянутыми установленными правилами, если поступает упомянутая оперативная информация и она не соответствует упомянутым предварительно заданным траекториям жестов.
2. Способ по п. 1, отличающийся тем, что упомянутый этап, на котором на основе упомянутой оперативной информации генерируется команда на управление процессом парковки, включает в себя:
преобразование части оперативной информации, полученной в течение первого заданного временного интервала, в упомянутую команду на управление процессом парковки в соответствии с установленными правилами, причем такое преобразование производится через каждый промежуток времени, равный упомянутому первому заданному временному интервалу на протяжении всего процесса приема упомянутой оперативной информации.
3. Способ по п. 1, отличающийся тем, что упомянутый этап, на котором на основе упомянутой оперативной информации генерируется команда на управление процессом парковки, включает в себя:
преобразование упомянутой оперативной информации в упомянутую команду на управление процессом парковки в соответствии с установленными правилами после получения в полном объеме упомянутой оперативной информации.
4. Способ по п. 3, отличающийся тем, что упомянутый этап, на котором упомянутая оперативная информация преобразовывается в упомянутую команду на управление процессом парковки в соответствии с установленными правилами после получения в полном объеме упомянутой оперативной информации, включает в себя:
преобразование упомянутой оперативной информации в упомянутую команду на управление процессом парковки в соответствии с упомянутыми установленными правилами после получения в полном объеме упомянутой оперативной информации, если пропускная способность канала связи между упомянутым мобильным устройством и упомянутым автомобилем меньше пороговой величины пропускной способности.
5. Способ по п. 1, отличающийся тем, что к упомянутой оперативной информации относится любой из следующих типов информации: информация о жестах по экрану упомянутого мобильного устройства, информация о нажатиях клавиш, информация о голосовом управлении и информация о тряске упомянутого мобильного устройства.
6. Способ по п. 5, отличающийся тем, что в упомянутом мобильном устройстве настроены опции выбора упомянутой оперативной информации и предварительно заданы траектории совершения операций, соответствующие упомянутой оперативной информации, причем к упомянутым опциям выбора относятся: опция управления жестами, опция управления нажатиями клавиш, опция голосового управления и опция управления тряской.
7. Способ по любому из пп. 2, 3, отличающийся тем, что к упомянутым установленным правилам относятся следующие правила:
если упомянутая оперативная информация соответствует первой заданной операции, а время, в течение которого упомянутая оперативная информация и первая заданная операция соответствуют друг другу, больше или равно второму заданному временному интервалу, то упомянутая сгенерированная команда на управление процессом парковки рассматривается как информация о продолжении автоматизированного паркинга;
если упомянутая оперативная информация не соответствует первой заданной операции или время, в течение которого упомянутая оперативная информация и первая заданная операция соответствуют друг другу, меньше упомянутого второго заданного временного интервала, то упомянутая сгенерированная команда на управление процессом парковки рассматривается как информация о прерывании автоматизированного паркинга.
8. Способ по п. 1, отличающийся тем, что после того, как выполнен упомянутый этап, на котором команда на управление процессом парковки подается автомобилю:
принимается и отображается текущая информация о парковке, присылаемая упомянутым автомобилем, причем под упомянутой текущей информацией о парковке понимается информация о состоянии всех связанных систем упомянутого автомобиля.
9. Способ по п. 8, отличающийся тем, что к упомянутой текущей информации о парковке автомобиля относится любой из следующих типов информации: информация о нормальной парковке, информация о прерванной парковке с возможностью возобновить процесс парковки и информация о прерванной парковке без возможности возобновить процесс парковки.
10. Способ по п. 9, отличающийся тем, что, если упомянутой текущей информацией о парковке автомобиля является упомянутая информация о прерванной парковке с возможностью возобновить процесс парковки, то после того, как выполнен упомянутый этап, на котором принимается и отображается присылаемая упомянутым автомобилем текущая информация о парковке, также:
происходят генерация информации о запросе возобновления процесса парковки и отображение такой информации, если упомянутой текущей информацией о парковке автомобиля является информация о нормальной парковке;
если в течение третьего заданного временного интервала от пользователя поступает первая подтверждающая информация в отношении упомянутой информации о запросе возобновления процесса парковки, то происходят генерация информации о возобновлении процесса парковки и отправка такой информации в упомянутый автомобиль.
11. Способ по п. 9, отличающийся тем, что если упомянутой текущей информацией о парковке автомобиля является упомянутая информация о прерванной парковке без возможности возобновить процесс парковки, то после того, как выполнен упомянутый этап, на котором принимается и отображается присылаемая упомянутым автомобилем текущая информация о парковке, также:
происходят генерация информации о завершении парковки и отправка такой информации в упомянутый автомобиль.
12. Способ автоматической парковки, применимый к автомобилям, оборудованным контроллерами системы автоматизированного паркинга, и отличающийся тем, что включает в себя:
прием вводимых пользователем заданных операций посредством упомянутого контроллера системы автоматизированного паркинга;
получение информации о передаче, на которой движется упомянутый автомобиль;
генерацию команды о начале автоматической парковки на основе упомянутой информации о заданных операциях и упомянутой информации о передаче и отправку такой команды в мобильное устройство для того, чтобы мобильное устройство, получив команду о начале автоматической парковки и оперативную информацию, введенную пользователем, на основе данной информации сгенерировало команду на управление процессом парковки и отправило такую команду в автомобиль;
получение от упомянутого мобильного устройства команды на управление процессом парковки и выполнение в соответствии с такой командой операций, связанных с автоматической парковкой, причем
упомянутый этап, на котором на основе упомянутой информации о заданных операциях и упомянутой информации о передаче генерируется команда о начале процесса автоматической парковки, а затем данная команда подается в мобильное устройство, включает в себя:
получение информации об окружающей обстановке, присланной датчиками автомобиля, генерацию действительной информации о парковочных местах и получение информации о выборе пользователем той или иной из упомянутой действительной информации о парковочных местах;
генерацию и отображение сообщения с напоминанием о необходимости торможения автомобиля;
получение информации о скорости движения автомобиля и генерацию информации о том, что автомобиль находится в неподвижном состоянии, если скорость упомянутого автомобиля составляет 0 км/ч;
генерацию упомянутой команды о начале автоматической парковки в соответствии с упомянутой информацией о заданных операциях, упомянутой информацией о передаче, упомянутой информацией о выборе пользователя и упомянутой информацией о неподвижном состоянии автомобиля после получения информации о неподвижном состоянии автомобиля и информации о выборе пользователем той или иной из упомянутой действительной информации о парковочных местах, а также последующую подачу упомянутой команды о начале автоматической парковки в мобильное устройство.
13. Способ по п. 12, отличающийся тем, что после того, как выполнен упомянутый этап, на котором от упомянутого мобильного устройства поступает команда на управление процессом парковки, происходит следующее:
получение информации о состоянии, отправленной связанными системами упомянутого автомобиля, генерация текущей информации о парковке автомобиля, а также отправка данной информации в упомянутое мобильное устройство.
14. Способ по п. 13, отличающийся тем, что к упомянутой текущей информацией о парковке автомобиля относится любой из следующих типов информации: информация о нормальной парковке, информация о прерванной парковке с возможностью возобновить процесс парковки и информация о прерванной парковке без возможности возобновить процесс парковки.
15. Способ по п. 14, отличающийся тем, что если упомянутой текущей информацией о парковке автомобиля является упомянутая информация о прерванной парковке с возможностью возобновить процесс парковки, то после того, как выполнен упомянутый этап, на котором от связанных систем упомянутого автомобиля поступает информация о состоянии, генерируется и отправляется в упомянутое мобильное устройство текущая информация о парковке автомобиля, также происходит следующее:
получение информации о возобновлении парковки, отправленной упомянутым мобильным устройством, генерация команды о восстановлении процесса парковки на основе упомянутой информации о возобновлении парковки и подача упомянутой команды о восстановлении процесса парковки во все связанные системы упомянутого автомобиля для того, чтобы данные системы могли выполнить автоматическую парковку.
16. Способ по п. 14, отличающийся тем, что если упомянутой текущей информацией о парковке автомобиля является упомянутая информация о прерванной парковке без возможности возобновить процесс парковки, то после того, как выполнен упомянутый этап, на котором от связанных систем упомянутого автомобиля поступает информация о состоянии, генерируется и отправляется в упомянутое мобильное устройство текущая информация о парковке автомобиля, также происходит следующее:
получение информации о завершении парковки, отправленной упомянутым мобильным устройством, генерация команды о завершении процесса парковки на основе упомянутой информации о завершении парковки и подача упомянутой команды о завершении процесса парковки во все связанные системы упомянутого автомобиля для того, чтобы данные системы могли завершить процесс автоматической парковки.
17. Устройство для реализации способа автоматической парковки, применимое к мобильным устройствам по любому из пп. 1-16 и отличающееся тем, что включает в себя:
первый модуль приема, предназначенный для приема вводимой пользователем оперативной информации при поступлении команды о начале автоматической парковки;
первый модуль генерации, предназначенный для генерации команды на управление процессом парковки на основе упомянутой оперативной информации;
первый модуль отправки, предназначенный для отправки в автомобиль упомянутой команды на управление процессом парковки для того, чтобы упомянутый автомобиль мог выполнить автоматическую парковку по такой команде.
18. Устройство для реализации способа автоматической парковки, применимое к автомобилям, оборудованным контроллерами системы автоматизированного паркинга, и отличающееся тем, что включает в себя:
третий модуль приема, предназначенный для приема вводимых пользователем заданных операций посредством упомянутого контроллера системы автоматизированного паркинга;
модуль получения информации, предназначенный для получения информации о передаче, на которой движется упомянутый автомобиль;
второй модуль отправки, предназначенный для генерации команды о начале автоматической парковки на основе упомянутой информации о заданных операциях и упомянутой информации о передаче и отправки такой команды в мобильное устройство для того, чтобы мобильное устройство, получив команду о начале автоматической парковки и оперативную информацию, введенную пользователем, на основе данной информации сгенерировало команду на управление процессом парковки и отправило такую команду в автомобиль;
четвертый модуль приема, предназначенный для получения от упомянутого мобильного устройства команды на управление процессом парковки и выполнения в соответствии с такой командой операций, связанных с автоматической парковкой, причем
упомянутый этап, на котором на основе упомянутой информации о заданных операциях и упомянутой информации о передаче генерируется команда о начале процесса автоматической парковки, а затем данная команда подается в мобильное устройство, включает в себя:
получение информации об окружающей обстановке, присланной датчиками автомобиля, генерацию действительной информации о парковочных местах и получение информации о выборе пользователем той или иной из упомянутой действительной информации о парковочных местах;
генерацию и отображение сообщения с напоминанием о необходимости торможения автомобиля;
получение информации о скорости движения автомобиля и генерацию информации о том, что автомобиль находится в неподвижном состоянии, если скорость упомянутого автомобиля составляет 0 км/ч;
генерацию упомянутой команды о начале автоматической парковки в соответствии с упомянутой информацией о заданных операциях, упомянутой информацией о передаче, упомянутой информацией о выборе пользователя и упомянутой информацией о неподвижном состоянии автомобиля после получения информации о неподвижном состоянии автомобиля и информации о выборе пользователем той или иной из упомянутой действительной информации о парковочных местах, а также последующую подачу упомянутой команды о начале автоматической парковки в мобильное устройство.
19. Вычислительно-обрабатывающее оборудование, отличающееся тем, что включает в себя:
запоминающее устройство, в котором хранятся машинно-считываемые коды;
один или несколько процессоров, во время обработки машинно-считываемых кодов которым или которыми вычислительно-обрабатывающим оборудованием реализуется способ автоматизированного паркинга, упомянутый в любом из пп. 1-16.
20. Машинно-считываемая среда, в которой хранится компьютерная программа, содержащая машинно-считываемые коды и обеспечивающая реализацию вычислительно-обрабатывающим оборудованием способа автоматизированного паркинга, упомянутого в любом из пп. 1-16, когда машинно-считываемые коды обрабатываются упомянутым вычислительно-обрабатывающим оборудованием.
| CN 110228466 A, 13.09.2019 | |||
| DE 102016226008 A1, 28.06.2018 | |||
| WO 2018235273 A1, 27.12.2018 | |||
| РАСПРЕДЕЛЕННЫЕ ВЫЧИСЛЕНИЯ НА ОСНОВЕ ИДЕНТИЧНОСТИ ДЛЯ РЕСУРСОВ УСТРОЙСТВ | 2003 |
|
RU2324970C2 |
| CN 105939901 A, 14.09.2016 | |||
| CN 110341702 A, 18.10.2019. | |||
