Предполагаемое изобретение относится к области ракетной техники, в частности к устройствам управления тягой двигательных установок (ДУ) в полете и анализа летно-технических характеристик ракет космического назначения (РКН).
В настоящее время значение тяги ДУ РН в масштабе реального времени на борту на всем участке полета ступени не определяется, что не дает возможности объективно оценивать динамику изменения значения тяги по времени полета и соответственно обеспечивать точное управление с малыми реализациями значений тяги ДУ (сверхмалое форсирование или дросселирование ДУ). Что позволит обеспечить их попадание в заданную область эллипса рассеивания на последних секундах полета (5-7 секунд до отделения ОЧ). Это стало предпосылкой для разработки инновационного подхода к расчету тяги двигательных установок РКН.
Актуальность настоящей работы подтверждена необходимостью контроля значения тяги, как основного показателя, характеризующего конструктивные особенности двигателя и пневмо-гидравлической системы ДУ, а также управления дроссельными устройствами подачи компонентов ракетного топлива в ДУ для точного управления тягой ДУ, обеспечивающего попадание ОЧ РН в заданную область.
Предложенные алгоритмы оценки значений тяги позволяют с высокой достоверностью определять и контролировать их значения в каждый момент времени в процессе полета и повысить качество оценки фактических энергетических характеристик РКН.
В случае возникновения нештатной (аварийной) ситуации использование предложенных алгоритмов позволяет определять вероятные причины аварии, в том случае если они являются следствием некорректной работы ДУ и пневмо-гидравлической системы, и выдавать рекомендации по их парированию. Оценка граничных значений тяги в процессе регулирования параметров жидкостных ракетных двигателей позволяет значительно сократить размеры фактических эллипсов рассеивания.
Устройство управления тягой двигательных установок РКН на основе оценки текущих значений тяги в полете по данным телеметрической информации разрабатывалось для осуществления управления тягой ДУ на основе расчета параметров тяги ДУ по данным ТМИ, а также для оценки летно-технических характеристик РКН по результатам пуска, а именно определения тяги ДУ в пустоте по данным материалов обработки телеметрической информации (ТМИ).
Данное устройство предназначено для определения значений тяги ДУ на требуемых интервалах полетного времени и может быть использовано для определения оптимального интервала времени  отделения ОЧ, обеспечивающего наиболее точное попадание ОЧ в заданный эллипс рассеивания, где началом интервала служит значение времени
отделения ОЧ, обеспечивающего наиболее точное попадание ОЧ в заданный эллипс рассеивания, где началом интервала служит значение времени  которое является определяющим для начала решения задачи формирования команды на выключение ДУ, а его окончание - момент выключения двигателя
которое является определяющим для начала решения задачи формирования команды на выключение ДУ, а его окончание - момент выключения двигателя 
Качественным и количественным показателями конструктивного совершенства и оптимальности протекания рабочих процессов ракетных двигателей являются удельные показатели. Одним из наиболее важных удельных показателей двигательных установок является удельный импульс тяги.
Удельным импульсом тяги принято называть импульс силы, приходящийся на единицу массы рабочего тела (топлива) [6]. Значительным влиянием удельного импульса на характеристики летательных аппаратов объясняется одна из основных тенденций современного ракетодвигателестроения - повышение удельного импульса [2].
В расчетах рассматривается только значение тяги в пустоте. Удельный импульс выражается из формулы Циолковского [1], [6].

где
V - характеристическая скорость летательного аппарата, м/с;
I - удельный импульс ракетного двигателя, кгс⋅с/кг;
m1 - начальная масса РКН (полезная нагрузка + «сухая» масса РН + топливо), кг;
m2 - конечная масса РКН (полезная нагрузка + «сухая» масса РН), кг.
Под «сухой» массой следует понимать массу конструкции РН (без заправленного топлива).
Из формулы (1) тяга ДУ определяется по формуле:

где
Δt - время полета РН;
 - массовый расход компонентов топлива через ДУ РН
- массовый расход компонентов топлива через ДУ РН
Расчет тяги двигателей ступеней РКН в пустоте производится по формуле 3

где
- для ступеней РН, оснащенных ДСИ (расходомерами) массовый расход компонентов топлива через ДУ РН определяется по формуле 4

- для ступеней РН, конструкция которых не предусматривает установку ДСИ массовый расход компонентов топлива через ДУ РН определяется с использованием значений объемов по уровню прохождения точек СУРТ по формуле 5

ΔWx1 - разность проекций кажущейся скорости центра масс изделия на продольную ось в начале t0 и конце tk выбранного интервала времени (по данным ТМИ) WXI), м/с;
g0 - ускорение силы тяжести у поверхности земли, м/с2;
 - массовый расход компонентов топлива через ДУ РН;
- массовый расход компонентов топлива через ДУ РН;
m(t0), m(tk) - масса РКН в начале t0 и конце tk выбранного интервала времени соответственно, кг;
m(ti), m(ti-1) - масса компонентов ракетного топлива в начале ti-1 и конце ti выбранного интервала времени соответственно, кг;
i - порядковый номер точки СУРТ, i=32÷1;
ti-1, ti - начало и конец выбранного интервала времени по данным ТМИ, с. Для вычислений используется временной интервал, где начальный момент времени t0 соответствует времени срабатывания верхней точки СУРТ, а конечный tk времени срабатывания нижней точки СУРТ. Временной интервал для вычислений выбирается таком образом, что начальный момент времени t0 соответствует значению, максимально приближенному к времени срабатывания верхней точки СУРТ и является максимально близким к значению времени  (определяющего начало формирования команды на выключение ДУ), а конечный момент времени tk максимально приближен к времени срабатывания нижней точки СУРТ и является максимально близким к значению времени на момент выключения двигателя
(определяющего начало формирования команды на выключение ДУ), а конечный момент времени tk максимально приближен к времени срабатывания нижней точки СУРТ и является максимально близким к значению времени на момент выключения двигателя 
Для расчета массы окислителя и горючего m(t0), m(tk) на границах выбранного временного интервала необходимо предварительно определить объемы и плотности соответствующих компонентов, зависящих от температуры компонентов ракетного топлива (КРТ).
Значения номинальных плотностей окислителя и горючего для расчета m(t0), m(tk) принимаются по результатам физико-химического анализа из паспортов на компоненты и вносятся в блок хранения информации. Значения фактических температур КРТ для расчета m(t0), m(tk) берутся согласно данным ТМИ на РКН.
I. Значения объемов  для расчета массы ступеней РН (оснащенных ДСИ (расходомерами)) на границах выбранного временного интервала m(t0), m(tk) определяются с использованием значений частот датчиков скорости истечения окислителя (горючего), полученных согласно данным ТМИ и значения тарировочного коэффициента датчика расхода. При этом для вычислений выбирается временной интервал, где начальный момент времени t0 соответствует значению, максимально приближенному к времени срабатывания верхней точки СУРТ и является максимально близким к значению времени
для расчета массы ступеней РН (оснащенных ДСИ (расходомерами)) на границах выбранного временного интервала m(t0), m(tk) определяются с использованием значений частот датчиков скорости истечения окислителя (горючего), полученных согласно данным ТМИ и значения тарировочного коэффициента датчика расхода. При этом для вычислений выбирается временной интервал, где начальный момент времени t0 соответствует значению, максимально приближенному к времени срабатывания верхней точки СУРТ и является максимально близким к значению времени  (определяющего начало формирования команды на выключение ДУ), а конечный момент времени tk максимально приближен к времени срабатывания нижней точки СУРТ и является максимально близким к значению времени на момент выключения двигателя
(определяющего начало формирования команды на выключение ДУ), а конечный момент времени tk максимально приближен к времени срабатывания нижней точки СУРТ и является максимально близким к значению времени на момент выключения двигателя 
Определяется секундный объем КРТ, т.е. объем компонента топлива, проходящий через расходомер за единицу времени, который потребуется для дальнейшего расчета массового расхода КРТ в границах выбранного временного интервала.


где
 - объем горючего, поступающего в ТНА ДУ, м3;
- объем горючего, поступающего в ТНА ДУ, м3;
 - частота датчика скорости истечения окислителя (горючего), Гц;
- частота датчика скорости истечения окислителя (горючего), Гц;
ВСР - тарировочный коэффициент датчика расхода;
fO(Г) - параметр датчика скорости истечения из ТМИ (параметр nA-Д);
tБЦВК=0,06c - продолжительность такта БЦВК.
Производится расчет массового расхода КРТ, на единичном интервале времени в границах выбранного временного диапазона


где
ti, ti-1 - значения единичного интервала времени, с;
 - плотность КРТ в зависимости от времени полета, кг/м3.
- плотность КРТ в зависимости от времени полета, кг/м3.
Далее массовый расход на единичных интервалах времени интегрируется в выбранном временном диапазоне для определения массы КРТ, израсходованных на этом временном промежутке.

где
 - масса израсходованных КРТ, кг;
- масса израсходованных КРТ, кг;
 - массовый расход КРТ на единичном интервале времени, кг;
- массовый расход КРТ на единичном интервале времени, кг;
Определяется суммарный массовый расход КРТ через ДУ.

где
 - суммарный массовый расход КРТ, кг;
- суммарный массовый расход КРТ, кг;
 - масса израсходованного окислителя, кг;
- масса израсходованного окислителя, кг;
 - масса израсходованного горючего, кг.
- масса израсходованного горючего, кг.
Определяется полная масса ступени РКН на конец выбранного интервала времени.

где
mсух - масса сухого изделия, кг;
 - массу топлива, израсходованного через ДУ, кг;
- массу топлива, израсходованного через ДУ, кг;
ΔmΣ - масса газов наддува, и газов, испаряющихся в полете, кг.
II. Значения объемов компонентов топлива для ступеней РН (конструкция которых не предусматривает установку ДСИ  на выбранные моменты времени полета
на выбранные моменты времени полета  определяется по уровню прохождения топливом точек СУРТ. При этом для вычислений выбирается временной интервал, где время срабатывания верхней точки СУРТ максимально близко к значению времени
определяется по уровню прохождения топливом точек СУРТ. При этом для вычислений выбирается временной интервал, где время срабатывания верхней точки СУРТ максимально близко к значению времени  (определяющего начало формирования команды на выключение ДУ), а момент времени срабатывания нижней точки СУРТ и является максимально близок к значению времени на момент выключения двигателя
(определяющего начало формирования команды на выключение ДУ), а момент времени срабатывания нижней точки СУРТ и является максимально близок к значению времени на момент выключения двигателя 
Масса компонентов ракетного топлива определяется в начале ti-1 и конце выбранного интервала времени:

Значения  выбираются по данным материалов обработки ТМИ, и соответствуют временам прохождения соответствующих точек СУРТ.
выбираются по данным материалов обработки ТМИ, и соответствуют временам прохождения соответствующих точек СУРТ.

где
 - плотность компонента топлива в зависимости от времени полета, кг/м3;
- плотность компонента топлива в зависимости от времени полета, кг/м3;
 - объем какого-либо компонента топлива на время прохождения точки СУРТ, м3.
- объем какого-либо компонента топлива на время прохождения точки СУРТ, м3.
Примечание
Так как для окислителя и горючего время прохождения i-ой точки СУРТ различно, то массу КРТ необходимо рассчитывать изохронно, т.е. на момент раннего прохождения i-ой точки СУРТ одним из компонентов. Тогда масса КРТ рассчитывается следующим образом:

где
 - масса компонента, срабатывание i-ой точки СУРТ которого произошло позже, кг;
- масса компонента, срабатывание i-ой точки СУРТ которого произошло позже, кг;
 - плотность компонента топлива в зависимости от времени полета, кг/м3;
- плотность компонента топлива в зависимости от времени полета, кг/м3;
 - объем какого-либо компонента топлива на время прохождения точки СУРТ, м;
- объем какого-либо компонента топлива на время прохождения точки СУРТ, м;
 - масса компонента топлива, израсходованная за промежуток времени между более ранним и более поздним прохождением i-ой точки СУРТ одним из компонентов (выбирается по данным ТМИ).
- масса компонента топлива, израсходованная за промежуток времени между более ранним и более поздним прохождением i-ой точки СУРТ одним из компонентов (выбирается по данным ТМИ).
Расчет массы компонента топлива, израсходованной за промежуток времени между более ранним и более поздним прохождением i-ой точки СУРТ производится следующим образом:

где
ti - время более позднего прохождения i-ой точки СУРТ одним из компонентов (выбирается по данным ТМИ).
tj - время более позднего прохождения i-ой точки СУРТ одним из компонентов (выбирается по данным ТМИ).
 - массовый расход КРТ за промежуток времени между более ранним и более поздним прохождением i-ой точки СУРТ одним из компонентов, кг;
- массовый расход КРТ за промежуток времени между более ранним и более поздним прохождением i-ой точки СУРТ одним из компонентов, кг;
Массовый расход КРТ за промежуток времени между более ранним и более поздним прохождением i-ой точки СУРТ одним из компонентов в свою очередь определяется по формуле:


где
 - объем КРТ, расходуемый за интервал времени между более ранним и более поздним прохождением точки СУРТ; м3;
- объем КРТ, расходуемый за интервал времени между более ранним и более поздним прохождением точки СУРТ; м3;
 - объем какого-либо компонента топлива на более раннее время прохождения точки СУРТ, м3;
- объем какого-либо компонента топлива на более раннее время прохождения точки СУРТ, м3;
 - объем какого-либо компонента топлива на более позднее время прохождения точки СУРТ, м3.
- объем какого-либо компонента топлива на более позднее время прохождения точки СУРТ, м3.
Определяется масса КРТ в начале ti-1 и конце ti выбранного интервала времени с учетом временной рассинхронизации прохождения точек СУРТ соответствующими компонентами.

Полученные значения  и
и  соответствуют значениям, используемым в формуле 5.
соответствуют значениям, используемым в формуле 5.
Для РКН «Ангара» расчет массы окислителя и горючего на границах выбранного временного интервала необходимо производить с учетом особенностей работы пневмогидравлической системы подачи (ПГСП), поддерживающей постоянное давление газовой подушки с помощью непрерывного контроля функциональными датчиками давления (ФДД) (дискретность опроса датчиков такт БЦВК 0,032768 с.). При этом для определения фактической плотности окислителя и горючего необходимо использовать осредненное значение датчиков температуры, установленных в топливных баках.
Расчет тяги производится с использованием формулы Циолковского

Недостатки вышеописанного порядка определения тяги ДУ заключаются в том, что:
1. Значение тяги можно определить только после получения телеметрической информации с борта РН при проведении послепускового анализа (т.е. не оперативно) и невозможно отслеживать в процессе полета РКН.
2. Значение удельного импульса определяется как среднеинтервальное на всем участке полета ступени, что не дает возможности объективно оценить динамику изменения значения тяги по времени полета.
Достоинством устройства является возможность определения значения тяги ДУ контролируя которое возможно в момент реального времени осуществлять управление тягой ДУ путем расчета такого значения изменения тяговых характеристик ДУ ΔР и соответствующего массового расхода компонентов на заданном временном интервале, которое позволит своевременно сформировать команду на выключение ДУ РН для обеспечения необходимых и достаточных условий отделения ОЧ и соответственно уменьшение рассеивания падения ОЧРН по дальности (большая ось эллипса рассеивания проходит в направлении изменения дальности).
Управление тягой ДУ (форсирование/дросселирование) осуществляется путем воздействия на привод импульсного регулятора скорости (ПИРС), который регулирует частоту вращения турбонасосного агрегата (ТНА), что позволяет изменять объемный расход компонентов топлив, поступающего в камеру сгорания ДУ или дросселя СУРТ (для ДУ 14Д23).
Необходимо определить поправку (так называемый относительный коэффициент тяги двигательной установки) η к последней уставке программной скорости РКС по наиболее актуальной информации от систем СУРТ, ККП (или встроенного измерителя кажущегося ускорения) и оперативно отработать воздействие на привод импульсного регулятора скорости с учетом этой поправки через штатные органы управления.
Коэффициент тяги двигательной установки - определяемому по формулам:


Штатная схема управления системы РКС (СУРТ) предусматривает в соответствии с заложенными в БАСУ алгоритмами в зависимости от знака рассчитанной поправки η сформировать команду на форсирование или дросселирование ДУ (или на приоткрытие, призакрытие проходного сечения дросселя СУРТ).
Далее, командный сигнал вводится в штатную схему управления приводами РКС (СУРТ), что приводит к повороту вала ПИРСа на эквивалентный угол. При этом изменяются обороты ТНА и соответственно изменяется расход КРТ. Тяга ДУ возрастает или снижается. В случае использования контура СУРТ (ДУ 14Д23) изменяется только расход по одному из компонентов, но результат эквивалентен.
По определенным навигационным параметрам системы уравнений движения РКН на активном участке траектории получаем фактическое значения проекции кажущейся скорости  которое далее сравнивается с прогнозируемым значением
которое далее сравнивается с прогнозируемым значением 
Разница этих значений формирует сигнал рассогласования для системы РКС, который обрабатывается этой системой и сводится к нулю. Для системы РКС регулирующим органом является орган, способный изменять количество топлива, подаваемого в двигатель, т.е. изменять секундный расход и за счет этого изменять тягу двигателя. Цепочка управления получается довольно сложной и описавается достаточно сложными уравнениями управления. Однако в конечном итоге это уравнение в первом приближении можно представить в упрощенном виде

где
 - коэффициенты управления системы РКС по скорости и перемещению соответственно.
- коэффициенты управления системы РКС по скорости и перемещению соответственно.

Это изменение секундного расхода топлива приведет к соответствующему изменению массы ракеты

и, соответственно, изменению тяги

Данная схема управления тягой двигателя РН позволит путем расчета значения изменений тяговых характеристик ДУ и относительного коэффициента тяги двигательной установки при минимальной доработке штатных органов управления РН обеспечить такое управление тягой ДУ, при котором обеспечивается максимальная вероятность попадания ОЧ РН в рассчитанный фактический эллипс рассеивания в зависимости от месяца запуска.
Использование устройства управления тягой двигательных установок РКН позволяет оказывать управляющее воздействие на расход топлива в системе питания двигательной установки. В процессе полета РКН данные ТМИ поступают в блок фильтрации и обработки параметров ТМИ, где происходит выбор необходимых температурных параметров и отбраковка аномальных значений.
Одновременно (в темпе лета) в бортовую цифровую вычислительную машину (БЦВМ) поступают навигационные параметры от трехосного гиростабилизатора, блока датчиков угловых скоростей, навигационной аппаратура потребителя и рассчитываются фактические значения проекции кажущейся скорости центра масс на продольную ось РН (W). Далее эти значения сравниваются с номинальными, хранящимися в блоке хранения информации, а полученные отклонения (ΔW) передаются в арифметико-логическое устройство (АЛУ).
На основе выбранных и обработанных данных ТМИ и полученных из БЦВМ отклонений (ΔW) в АЛУ в режиме реального времени происходит расчет значений изменений тяговых характеристик ДУ (ΔР) и коэффициента тяги двигательной установки (η). Эти параметры поступают в преобразователь, который формирует и передает командные сигналы на исполнительные органы системы регулирования кажущейся скорости. В качестве исполнительных органов выступает привод импульсный регулятора скоростей (ПИРС), непосредственно отвечающий за расход (увеличение/уменьшение) КРТ. Регулирование положения ПИРС приводит к изменению количества КРТ, поступающего в ДУ и соответственно изменению тяговых характеристик ДУ. Это изменение фиксируется определенными датчиками информации, с которых в общем потоке ТМИ поступает в блок фильтрации и отбраковки информации, тем самым осуществляя обратную связь от реализуемого воздействия на ДУ.
Задачей изобретения является разработка устройства оценивания фактических значений тяги ДУ, как основного параметра, характеризующего конструктивные особенности двигателя и системы питания и управления тягой ДУ, позволяющего рассчитать значения ΔP, η на основе определения тяговых характеристик ДУ и отклонений проекции кажущейся скорости для попадания ОЧ РН в заданный эллипс рассеивания.
Заявлено устройство управления тягой двигательных установок ракет космического назначения «Союз-2», «Ангара» на основе оценки текущих значений тяги в полете по данным телеметрической информации (ТМИ) для попадания отделяющихся частей (ОЧ) в заданную область (блок 1), содержащее блок фильтрации и отбраковки информации ТМИ (блок 3) и блок хранения информации (блок 2), выходы которых соединены с входом арифметико-логического устройства (АЛУ) (блок 4), выход которого соединен с преобразователем в командные сигналы (блок 5), непосредственно передающим управляющие сигналы на исполнительные органы системы регулирования кажущейся скорости с целью регулирования тяги ДУ, отличающееся от известных тем, что АЛУ (блок 4) выполнен с возможностью обеспечивать расчет значений изменений тяговых характеристик ДУ и коэффициента тяги двигательной установки на основе параметров ТМИ в темпе лета и данных, поступающих из бортовой цифровой вычислительной машины (БЦВМ) и блока хранения информации (блок 2) с целью обеспечения попадания ОЧ в заданный эллипс рассеивания, представленное на Фиг. 1
В качестве арифметико-логического устройства (АЛУ) может выступать цифровой сигнальный процессор. В качестве блока фильтрации и обработки параметров ТМИ может использоваться коммутационная аппаратура и телеметрическое согласующее устройство. В качестве блока хранения информации может выступать постоянное запоминающее устройство (ПЗУ) с объемом хранения до 50 Гб.
В качестве преобразователя в командные сигналы используется стандартный преобразователь электрических сигналов.
В качестве блока исполнительных органов системы регулирования кажущейся скорости выступает ПИРС, регулирующий изменение расхода КРТ, поступающего в ДУ.
Техническим результатом изобретения является устройство, обеспечивающее автономное управление тягой ДУ на последних секундах полета РКН до отделения ОЧ для обеспечения их попадания в заданный эллипс рассеивания, реализуемое путем использования параметров ТМИ, навигационных параметров, рассчитанных БЦВМ, номинальных данных, хранящихся в ПЗУ, что позволяет осуществлять точное управление тягой ДУ с целью обеспечения попадания ОЧ в заданный эллипс рассеивания, не привлекая мощности БАСУ (не обеспечивающей достаточное быстродействие расчетов значений изменений тяговых характеристик ДУ (ΔР) и коэффициента тяги двигательной установки за 5-7 секунд до отделения ОЧ), что в целом значительно повышает эффективность и оперативность поисковых работ на местности в районе падения.
Полученный полезный эффект достигается тем, что:
- в АЛУ реализуются простые оперативные алгоритмы расчета тяговых характеристик ДУ;
- в поток ТМИ, поступающей в блок фильтрации и отбраковки информации передаются значения фактического изменения тяговых характеристик ДУ, тем самым осуществляя обратную связь от реализуемого воздействия на ДУ.
Таким образом, положительный эффект внедрения данного устройства состоит:
- в оперативном определении тяги ДУ в реальном масштабе времени;
- в обеспечении возможности управления тягой ДУ на малых промежутках времени с высоким быстродействием на различных участках полета РКН;
- в обеспечении контроля поддержания заданных режимов работы ДУ;
- в повышении эффективности и оперативности поисковых работ на местности в районе падения ОЧ;
- в невысокой стоимости предлагаемого изобретения.
Источники информации
1. Д. Саттон. Ракетные двигатели./ - Москва, 1952. - 314 с.
2. В.И. Федосеев, Г.Б. Синярев. Введение в ракетную технику./ - Москва, 1960. - 501 с.
3. Н.Ф. Аверкиев, С.А. Богачев, С.А. Васьков, С.А. Власов, А.В. Кульвиц, И.Ю. Кубасов, П.А. Мамон, Д.А. Мосин, В.В. Салов. Основы теории полета летательных аппаратов./ - Санкт-Петербург, 2013. - 242 с.
4. Изделие 14А127. Инструкция по заправке (сливу) компонентов топлива. 14А127 ИЭ23 ч. 4 Определение объемных доз и полетных уровней заправки КТ./ 2014. - 29 с.
5. Изделие 14А15. Инструкция, по оценке работы бортовых систем. Часть третья. Оценка работы бортовых систем в полете. Книга четвертая. Оценка энергетических характеристик 14А15 ИЭ 20 ч. 3 кн. 4/ 2012. - 26 с.
6. Изделие 14А14. Инструкция по оценке работы бортовых систем. Часть третья. Оценка работы бортовых систем в полете. Книга четвертая. Оценка энергетических характеристик при летных испытаниях 14А14 ИЭ 20 ч. 3 кн. 4/ 2002. - 40 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ спуска отделяющейся части ступени ракеты космического назначения и устройство для его осуществления | 2015 |
|
RU2621771C2 |
| СПОСОБ УВОДА ОТДЕЛИВШЕЙСЯ ЧАСТИ СТУПЕНИ РАКЕТЫ-НОСИТЕЛЯ С ОРБИТЫ ПОЛЕЗНОЙ НАГРУЗКИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2518918C2 |
| СПОСОБ РЕАЛИЗАЦИИ ТЯГИ РАКЕТНОГО ДВИГАТЕЛЯ | 2012 |
|
RU2517993C1 |
| СПОСОБ СПУСКА ОТДЕЛЯЮЩЕЙСЯ ЧАСТИ СТУПЕНИ РАКЕТЫ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ | 2011 |
|
RU2475429C1 |
| СПОСОБ ГАЗИФИКАЦИИ ЖИДКОГО РАКЕТНОГО ТОПЛИВА В БАКЕ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2522536C1 |
| СПОСОБ СПУСКА ОТДЕЛЯЮЩЕЙСЯ ЧАСТИ СТУПЕНИ РАКЕТЫ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2581894C1 |
| СПОСОБ УВОДА ОТДЕЛЯЮЩЕЙСЯ ЧАСТИ РАКЕТЫ-НОСИТЕЛЯ С ОРБИТЫ ПОЛЕЗНОЙ НАГРУЗКИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2482034C1 |
| СПОСОБ УВОДА ОТДЕЛИВШЕЙСЯ ЧАСТИ РАКЕТЫ-НОСИТЕЛЯ С ОРБИТЫ ПОЛЕЗНОЙ НАГРУЗКИ И ДВИГАТЕЛЬНАЯ УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2406856C2 |
| СИСТЕМА КОНТРОЛЯ ТЕМПЕРАТУР ТОПЛИВНОГО БАКА ОКИСЛИТЕЛЯ РАКЕТЫ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ "СОЮЗ-2" | 2016 |
|
RU2651554C2 |
| СПОСОБ ПОВЫШЕНИЯ ЭФФЕКТИВНОСТИ РАКЕТЫ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ С МАРШЕВЫМ ЖРД | 2014 |
|
RU2562826C1 |
Изобретение относится к области ракетной техники, в частности к устройствам анализа летно-технических характеристик ракет космического назначения (РКН) и управления системой питания двигательных установок ракет космического назначения в полете. Устройство управления тягой двигательных установок (ДУ) ракет космического назначения «Союз-2», «Ангара» на основе оценки текущих значений тяги в полете по данным телеметрической информации (ТМИ) для попадания отделяющихся частей (ОЧ) в заданную область состоит из блока фильтрации и отбраковки информации ТМИ и блока хранения информации, выходы которых соединены с входом арифметико-логического устройства (АЛУ), выход которого соединен с преобразователем в командные сигналы, непосредственно передающим управляющие сигналы на исполнительные органы системы регулирования кажущейся скорости с целью регулирования тяги ДУ. АЛУ выполнен с возможностью обеспечения расчета значений изменений тяговых характеристик ДУ и коэффициента тяги двигательной установки на основе параметров ТМИ в темпе лета и данных, поступающих из бортовой цифровой вычислительной машины (БЦВМ) и блока хранения информации. Обеспечивается повышение точности попадания ОЧ в заданный эллипс рассеивания. 1 ил.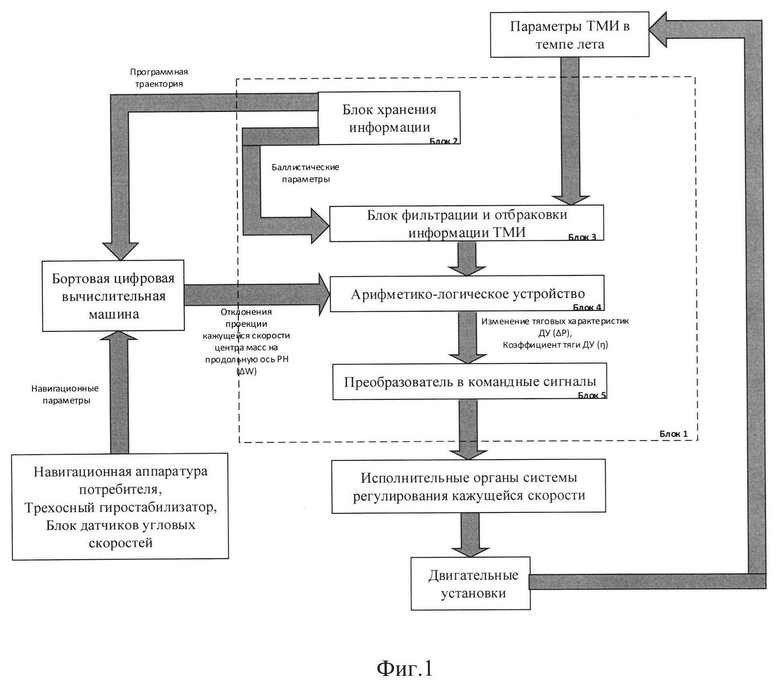
Устройство управления тягой двигательных установок (ДУ) ракет космического назначения «Союз-2», «Ангара» на основе оценки текущих значений тяги в полете по данным телеметрической информации (ТМИ) для попадания отделяющихся частей (ОЧ) в заданную область, состоящее из блока фильтрации и отбраковки информации ТМИ и блока хранения информации, выходы которых соединены с входом арифметико-логического устройства (АЛУ), выход которого соединен с преобразователем в командные сигналы, непосредственно передающим управляющие сигналы на исполнительные органы системы регулирования кажущейся скорости с целью регулирования тяги ДУ, отличающееся от известных тем, что АЛУ выполнен с возможностью обеспечения расчета значений изменений тяговых характеристик ДУ и коэффициента тяги двигательной установки на основе параметров ТМИ в темпе лета и данных, поступающих из бортовой цифровой вычислительной машины (БЦВМ) и блока хранения информации, с целью обеспечения попадания ОЧ в заданный эллипс рассеивания.
| Н.Ф | |||
| Аверкиев, С.А | |||
| Богачев, С.А | |||
| Васьков, С.А | |||
| Власов, А.В | |||
| Кульвиц, И.Ю | |||
| Кубасов, П.А | |||
| Мамон, Д.А | |||
| Мосин, В.В | |||
| Салов | |||
| Основы теории полета летательных аппаратов./ - Санкт-Петербург, 2013 | |||
| Металлические подъемные леса | 1921 |
|
SU242A1 |
| СПОСОБ МИНИМИЗАЦИИ ЗОН ОТЧУЖДЕНИЯ ОТДЕЛЯЕМЫХ ЧАСТЕЙ РАКЕТЫ-НОСИТЕЛЯ | 2014 |
|
RU2585395C1 |
| СПОСОБ СПУСКА ОТДЕЛЯЮЩЕЙСЯ ЧАСТИ СТУПЕНИ РАКЕТЫ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2581894C1 |
| Среда для определения зараженности почвы | 1978 |
|
SU763468A1 |

