ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к области эластографии для определения вязкоупругих свойств вязкоупругой среды, порождающей ультразвуковой сигнал после облучения ультразвуком. Во-первых, изобретение относится к способу гибридной эластографии, включающему в себя этап гармонической эластографии и этап транзиентной эластографии. Во-вторых, изобретение относится к зонду для реализации способа гибридной эластографии. В-третьих, изобретение относится к устройству для гибридной эластографии. Способ гибридной эластографии по настоящему изобретению пригоден, в частности, для определения свойств вязкоупругой среды, такой как печень человека или животного.
УРОВЕНЬ ТЕХНИКИ
Транзиентная эластография (называемая также импульсной эластографией) является одним из наиболее известных и эффективных способов определения эластичности вязкоупругой среды. Например, транзиентная эластография широко применяется для определения эластичности печени людей или животных.
В транзиентной эластографии формируется импульсная сдвиговая волна и измеряется скорость ее распространения внутри представляющей интерес вязкоупругой среды. Затем скорость распространения сдвиговой волны дает возможность вычислить модуль упругости среды и, тем самым, измерить ее эластичность.
Для реализации транзиентной эластографии существуют несколько методов.
Например, заявитель разработал и выпустил на рынок метод транзиентной эластографии с контролируемой вибрацией (VCTE). Устройство, реализующее данный метод, названное Fibroscan®, способно быстро, неинвазивно и воспроизводимо измерять эластичность печени человека. В таком устройстве для транзиентной эластографии, сдвиговая волна формируется вибратором, размещенном в контакте со средой, которую требуется охарактеризовать. Затем распространение сдвиговой волны контролируется с использованием серии ультразвуковых сигналов сбора данных, реализуемых ультразвуковым преобразователем с высокой частотой повторения импульсов. Каждый ультразвуковой сигнал сбора данных соответствует по меньшей мере одному излучению ультразвуковых волн. Каждое излучение ультразвуковых волн может быть связано с приемом и записью в реальном времени эхо-сигналов, формируемых отражательными частицами, присутствующими в исследуемой среде, для заданного диапазона глубин. Отраженные ультразвуковые сигналы обрабатываются методом корреляции, чтобы решить обратную задачу определения перемещений ткани, вызываемых распространением сдвиговой волны в виде функции времени и положения в среде. Исследование упомянутых перемещений позволяет решить обратную задачу определения скорости распространения сдвиговой волны внутри вязкоупругой среди и, следовательно, эластичности тканей, как поясняется в документе “Transient elastography: a new non-invasive method for assessment of hepatic fibrosis”, L. Sandrin et al., Ultrasound in Medicine and Biology, Vol. 29, pages 1705-1713, 2003.
Метод VCTE полезен, в частности, потому, что он позволяет разделить во времени распространение сдвиговой волны и распространение волн сжатия, формируемых одновременно со сдвиговой волной, двух типов волн с очень сильно различающимися скоростями распространения. Волна сжатия распространяется со скоростью приблизительно 1500 м/с, которую можно считать бесконечно высокой по сравнению со скоростью распространения сдвиговой волны, которая обычно составляет 1-10 м/с. Действительно, такое разделение имеет важное значение потому, что присутствие волн сжатия одновременно со сдвиговой волной вносит систематическую погрешность в измерение скорости распространения сдвиговой волны.
Одним из главных ограничений метода VCTE является сложность проверки правильности позиционирования зонда перед выполнением измерения эластичности и, следовательно, включения механического импульса. Действительно, неправильное позиционирование зонда может привести к плохому распространению сдвиговой волны или даже к отсутствию сдвиговой волны. Например, распространение сдвиговой волны может нарушаться наличием отражений, связанных с близостью границ исследуемого органа, или совсем не происходить в присутствии жидкой границы между зондом и исследуемой средой. Действительно известно, что сдвиговые волны не переходят жидкие барьеры; в частности, это имеет место при наличии асцитов в брюшной полости. Поэтому результат измерения эластичности будет недостоверным.
Сейчас ультразвуковые волны можно использовать чтобы управлять позиционированием вибратора для транзиентной эластографии. Например, можно применить ультразвуковую визуализацию или такое прицельное средство, которое описано в патентной заявке EP2739211 A1. Однако данные решения не достаточны, так как они не позволяют прямо предсказать неправильное распространение сдвиговой волны, связанное, например, с неправильным позиционированием зонда или присутствием жидкой границы.
Из других методов транзиентной эластографии можно упомянуть методы, основанные на формировании сдвиговой волны посредством радиационного давления или метод “Acoustic Radiation Force Impulse (ARFI)” (радиационное давление ультразвукового импульса). Данный метод описан, например, в документе “Acoustic Radiation Force Impulse Imaging: Ex-vivo and in-vivo demonstration of transient shear wave propagation”, K. Nightingale et al., IEEE Biomedical Imaging, 2002.
Другой метод транзиентной эластографии описан в документе “Supersonic Shear Imaging: A new technique for soft tissue elasticity mapping”, J. Bercoff et al., IEEE Transactions on Utrasonics, Ferroelectrics, and Frequency Control, 2004. В соответствии с данным методом, сдвиговые волны формируются силой радиационного давления посредством фокусировки ультразвукового луча в разных точках в среде, что дает возможность получать сдвиговые волны, имеющие плоский волновой фронт.
Однако ни один из приведенных методов транзиентной эластографии не обеспечивает простого и полного решения проблемы позиционирования зонда для того, чтобы получать измерение эластичности, которое является определенным образом достоверным.
Существуют также методы, так называемой гармонической эластографии. Данные методы основаны на приложении непрерывной вибрации, имеющей частоту в диапазоне от 30 Гц до 100 Гц. Упругие волны, создаваемые внутри среды, являются квазистационарными волнами, суперпозициями сдвиговых волн и волн сжатия.
Из существующих методов гармонической эластографии можно назвать следующие:
- Метод так называемой «магнитно-резонансной эластографии» или MRE, в котором применяется магнитная резонансная томография для наблюдения квазистационарных волн, формируемых в среде; данный метод описан в документе “Magnetic resonance elastography by direct visualization of propagating acoustic strain waves”, R. Muthupillai et al., Science 269, 1995. Данный метод выполняют под контролем магнитной резонансной томографии (MRI);
- Метод так называемой соноэластографии, описанный, например, в документе “A pulsed doppler ultrasonic system for making noninvasive measurements of the mechanical properties of soft tissues”, T. Krouskop, Journal of Rehabilitation Research and Development, 24, 1987. Данный метод выполняют под контролем ультрасонографии;
- Метод так называемой «эластографии с временной гармоникой», описанный, например, в документе “In vivo time-harmonic multifrequency elastography of the human liver”, H. Tzschatzsch et al., Phys. Med. Biol., 59, 2004. Данный метод выполняют под контролем ультрасонографии.
Даже если приведенные методы не требуют создания импульсной сдвиговой волны, которая распространяется в среде, которую требуется охарактеризовать, они сопряжены с некоторыми затруднениями.
Например, гармоническая эластография не дает возможности разделять сдвиговые волны и волны сжатия, которые создаются одновременно в среде, которую требуется охарактеризовать. Поэтому квазистационарная упругая волна, создаваемая внутри среды, которую требуется охарактеризовать, является суперпозицией квазистационарных сдвиговой волны и волны сжатия. Поскольку скорость сдвиговых волн намного меньше скорости волн сжатия, то реально наблюдаемая скорость вибрации не соответствует скорости сдвиговой волны. Следовательно, необходимо учитывать эффект распространения волн сжатия, чтобы можно было измерить скорость распространения сдвиговых волн. Для этого необходимо записывать комплексные данные и вычислять смещения по трем пространственным направлениям, x, y, z.
Единственным методом гармонической эластографии, допускающим в настоящее время выполнение такой коррекции, является метод MRE. Однако, данный метод нуждается в очень сложном и дорогом устройстве магнитно-резонансной томографии и, следовательно, является намного более сложным для реализации, чем метод VCTE.
Более того, данные методы выполняются под контролем традиционных способов типа ультрасонографии или магнитно-резонансной томографии. Поэтому они требуют обширного опыта от оператора, что не располагает к широкому распространению технологии.
Кроме того, метод гармонической эластографии можно применить для управления способами лечения. Данный подход включает в себя, например, лечение опухолей, местоположение которых определяется методом гармонической эластографии, с помощью способов гипертермической терапии.
ТЕХНИЧЕСКАЯ ПРОБЛЕМА
Методы гармонической или транзиентной эластографии базируются на управлении измерением путем использования традиционного метода визуализации (ультрасонографии или магнитно-резонансной томографии), что требует обширного опыта от оператора и не обеспечивает оптимального определения местонахождения ткани, которую требуется охарактеризовать в отношении распространения сдвиговых волн. В результате, невозможно спрогнозировать достоверность эластографического измерения, которое намереваются выполнить. И наконец, данные методы не пригодны для реализации с устройствами, которые имеют небольшие размеры и удобны для применения.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Чтобы по меньшей мере частично решить приведенные проблемы, настоящее изобретение предлагает новый метод эластографии, который будет называться гибридной эластографией в остальной части настоящего документа.
С этой целью, изобретение относится, во-первых, к способу гибридной эластографии, включающему в себя следующие этапы:
- приложение с использованием первого вибратора, содержащегося в зонде, находящемся в контакте с вязкоупругой средой, непрерывной низкочастотной вибрации и формирование с использованием ультразвукового преобразователя, находящегося в контакте с вязкоупругой средой, первой серии ультразвуковых сигналов сбора данных, при этом упомянутая первая серия ультразвуковых сигналов сбора данных включает в себя группы ультразвуковых сигналов сбора данных, причем группы ультразвуковых сигналов сбора данных формируются с первой частотой повторения импульсов, каждая группа ультразвуковых сигналов сбора данных включает в себя по меньшей мере один сигнал сбора данных, и непрерывная вибрация формирует упругую волну внутри вязкоупругой среды;
- приложение с использованием второго вибратора, содержащегося в зонде, находящемся в контакте с вязкоупругой средой, низкочастотного импульса и формирование с использованием ультразвукового преобразователя, второй серии ультразвуковых сигналов сбора данных, причем ультразвуковые сигналы сбора данных, составляющие вторую серию, формируются со второй частотой повторения импульсов, и низкочастотный импульс формирует нестационарную сдвиговую волну, распространяющуюся внутри вязкоупругой среды.
В соответствии с одним вариантом осуществления, непрерывная вибрация, прикладываемая первым вибратором, прекращается до приложения низкочастотного импульса вторым вибратором и формированием второй серии ультразвуковых сигналов сбора данных.
Под гибридной эластографией понимается способ реализации метода эластографии, включающий в себя по меньшей мере один этап приложения непрерывной низкочастотной вибрации и этап приложения низкочастотного импульса. Иначе говоря, способ гибридной эластографии в соответствии с изобретением включает в себя как формирование непрерывной вибрации, что характерно для метода гармонической эластографии, так и формирование низкочастотного импульса, что характерно для метода транзиентной эластографии.
Таким образом, непрерывная низкочастотная вибрация, которая является непрекращающейся, и низкочастотный импульс, длительность которого является короткой, различаются. Обычно длительность низкочастотного импульса находится в диапазоне от 1/2×tSWF до 20/tSWF, где tSWF является центральной частотой низкочастотного импульса.
Под непрерывной низкочастотной вибрацией понимается непрерывное воспроизведение волновой картины. Данная картина может быть, например, идеальной синусоидой; и, в таком случае, она называется монохроматической вибрацией. Вибрация может также формироваться путем воспроизведения произвольной картины. В соответствии с одним вариантом осуществления, непрерывная вибрация прерывается во время переключения в режим низкочастотного импульса, чтобы прекратить процесс измерения, или когда условия измерения больше не являются удовлетворительными. Условия измерения могут быть, например, условием, налагаемым на силу соприкосновения с исследуемой средой. Центральная частота непрерывной низкочастотной вибрации обычно находится в диапазоне 5-500 Гц.
Под упругой волной понимается суперпозиция волны сжатия и сдвиговых волн.
Под ультразвуковым сигналом сбора данных понимается излучение ультразвукового импульса. Упомянутое излучение ультразвуковых волн может быть связано с приемом и записью в реальном времени эхо-сигналов, формируемых отражательными частицами, присутствующими в исследуемой среде для заданного диапазона глубин.
Таким образом, первая серия ультразвуковых сигналов сбора данных формируется повторением групп сигналов сбора данных. Группа сигналов сбора данных включает в себя по меньшей мере один ультразвуковой сигнал сбора данных. Группы сигналов сбора данных излучаются или формируются с первой частотой повторения импульсов. Первая частота повторения импульсов называется межгрупповой частотой повторения импульсов. Первая частота повторения импульсов обычно находится в диапазоне 5-500 Гц.
Когда каждая группа сигналов сбора данных формируется по меньшей мере двумя ультразвуковыми сигналами сбора данных, ультразвуковые сигналы сбора данных, формирующие одну и ту же группу, излучаются или формируются с внутригрупповой частотой повторения импульсов, обычно, в диапазоне от 500 Гц до 100 кГц.
В качестве преимущества, применение первой низкой частоты повторения импульсов в процессе приложения непрерывной вибрации дает возможность измерять перемещения вязкоупругой ткани, при одновременном ограничении акустической энергии, направляемой в ту же самую ткань, чтобы не превышать пределы пиковой и средней акустической мощности.
Термин «смещение» рассматривается в настоящем документе в широком смысле. Он включает в себя любой параметр перемещения, такой как смещение, скорость, деформация, коэффициент деформации, скорость деформации и любое математическое преобразование, применимое к данным параметрам.
Под низкочастотным импульсом понимается импульс с центральной частотой, обычно в диапазоне 5-500 Гц.
Под второй серией ультразвуковых сигналов сбора данных понимается серия ультразвуковых сигналов сбора данных, излучаемых или формируемых с частотой повторения импульсов, превышающей 500 Гц и, предпочтительно, находящейся в диапазоне от 500 Гц до 100 кГц.
В процессе приложения непрерывной вибрации, внутри вязкоупругой среды формируется упругая волна.
Первая серия ультразвуковых сигналов сбора данных используется для исследования распространения упругой волны внутри вязкоупругой среды. При этом можно детектировать эхо-сигналы или ультразвуковые сигналы, отраженные вязкоупругой средой, и по данным отраженным ультразвуковым сигналам можно вычислить смещения вязкоупругой среды, вызываемые распространением упругой волны, формируемой непрерывной вибрацией, внутри вязкоупругой среды.
Например, можно вычислить смещения вязкоупругой среды путем обработки корреляционным методом ультразвуковых сигналов сбора данных, составляющих одну и ту же группу сигналов сбора данных первой серии ультразвуковых сигналов сбора данных.
Затем можно измерить свойства упругой волны внутри среды и вычислить в реальном времени индикатор позиционирования по измеренным свойствам. Данный индикатор отображается в реальном времени, чтобы служить указателем для оператора. Примерами таких свойств являются амплитуда и фаза упругой волны, измеренные в зависимости от глубины в ткань, которую требуется охарактеризовать. Кроме того, можно вычислить фазовую скорость упругой волны. Хотя из фазовой скорости упругой волны можно вывести значение эластичность, но данное значение отличается от значения эластичности, выведенного с помощью импульсной волны, при наличии суперпозиции сдвиговых волн и волны сжатия в процессе приложения непрерывной вибрации.
В оставшейся части настоящего документа «индикатор позиционирования» и «индикатор позиционирования реального времени» относятся к одному и тому же индикатору позиционирования реального времени.
Реальное время означает, что отображение индикатора периодически обновляется во время обследования. В общем, частота обновления составляет около 20 Гц, но может быть также порядка 1 Гц.
Важно отметить, что непрерывная вибрация применяется для контроля позиционирования зонда, используемого для гибридной эластографии. Например, непрерывную вибрацию можно применять для проверки присутствия паренхимы печени, обращенной к зонду. Важно отметить, что непрерывная вибрация применяется не вместо измерения, выполняемого импульсом; она завершает это измерение. Иначе говоря, на этапе приложения непрерывной вибрации, возможно, но не обязательно опосредованное измерение вязкоупругих свойств среды. Данное последнее измерение физически не тождественно эластичности в смысле модуля упругости, но может коррелироваться с данным значением.
Приложение низкочастотного импульса формирует нестационарную сдвиговую волну, распространяющуюся внутри вязкоупругой среды, которую требуется охарактеризовать. Контроль распространения сдвиговой волны позволяет измерять вязкоупругие свойства ткани, которую требуется охарактеризовать, например, скорость распространения сдвиговой волны, эластичность ткани, модуль сдвига ткани или модуль упругости ткани. При использовании способа в соответствии с изобретением, измерением вязкоупругих свойств среды можно не учитывать, если позиционирование зонда является неудовлетворительным. Иначе говоря, достоверность измерения эластичности можно проверять априорно с помощью индикатора позиционирования, полученного на этапе приложения непрерывной вибрации.
В качестве альтернативы, приложение низкочастотного импульса может включаться только в случае, если правильность позиционирования зонда подтверждена предварительно на этапе гармонической эластографии.
Вторая серия ультразвуковых сигналов сбора данных, излучаемая или формируемая со второй частотой повторения импульсов, используется для исследования распространения нестационарной сдвиговой волны внутри вязкоупругой среды, которую требуется охарактеризовать. Представляется возможным записывать ультразвуковые сигналы, отраженные вязкоупругой средой и вычислять по данным отраженным ультразвуковым сигналам смещения вязкоупругой среды, вызванные распространением сдвиговой волны. Измерение смещений, вызываемых в вязкоупругой среде упомянутым распространением позволяет в дальнейшем решить обратную задачу определения скорости распространения сдвиговой волны и, следовательно, определения эластичности среды с использованием формулы E=3ρVs2, где E является эластичностью или модулем упругости, ρ означает плотность, и Vs является скоростью сдвига.
Таким образом, способ гибридной эластографии в соответствии с изобретением позволяет проверять правильность позиционирования зонда с использованием метода гармонической эластографии и затем измерять вязкоупругие свойства среды, которую требуется охарактеризовать, с использованием метода транзиентной или импульсной эластографии. В частности, после того, как правильность позиционирования зонда проверена, на этапе транзиентной эластографии выполняется измерение вязкоупругих свойств. Это измерение обеспечивает более точное значение вязкоупругих свойств среды, по сравнению с гармонической эластографией, так как в процессе импульсной эластографии отсутствует суперпозиция волны сжатия и сдвиговые волны, в отличие от того, что наблюдается в процессе гармонической эластографии.
Иначе говоря, первый этап гармонической эластографии позволяет управлять позиционированием зонда относительно ткани, которую требуется охарактеризовать, посредством обеспечения оператору индикатора, прогнозирующего успешность измерения методом импульсной эластографии. После того, как правильность позиционирования зонда проверена, можно инициировать сбор данных методом транзиентной эластографии, при этом нестационарная сдвиговая волна правильно распространяется внутри среды.
В качестве преимущества, способ гибридной эластографии в соответствии с изобретением позволяет выполнять измерение вязкоупругих свойств ткани, которую требуется охарактеризовать, надежным и воспроизводимым образом, с использованием метода транзиентной эластографии, при одновременном простом и точном позиционировании зонда методом гармонической эластографии.
Способ гибридной эластографии в соответствии с изобретением может также иметь одну или более из нижеприведенных характеристик, рассматриваемых по отдельности или в соответствии со всеми их технически возможными сочетаниями:
- способ гибридной эластографии в соответствии с изобретением дополнительно включает в себя следующие этапы:
определение, исходя из первой серии ультразвуковых сигналов сбора данных по меньшей мере одного свойства упругой волны внутри вязкоупругой среды;
определение, исходя из второй серии ультразвуковых сигналов сбора данных по меньшей мере одного свойства нестационарной сдвиговой волны и свойства вязкоупругой среды;
- один и тот же вибратор применяется для приложения непрерывной низкочастотной вибрации и низкочастотного импульса;
- свойство упругой волны внутри вязкоупругой среды служит для вычисления индикатора позиционирования реального времени для зонда относительно вязкоупругой среды, подлежащей исследованию;
- способ в соответствии с изобретением дополнительно включает в себя этап отображения в реальном времени индикатора позиционирования реального времени; при этом частота обновления отображения имеет значение, например, не ниже 5 Гц;
- этап вычисления индикатора позиционирования и этап его отображения выполняются одновременно;
- этап приложения низкочастотного импульса и формирования второй серии ультразвуковых сигналов сбора данных инициируется только в случае, если индикатор позиционирования реального времени удовлетворяет заданному условию;
- этап приложения низкочастотного импульса и формирования второй серии ультразвуковых сигналов сбора данных инициируется автоматически на основании значения индикатора позиционирования реального времени;
- этап приложения низкочастотного импульса и формирования второй серии ультразвуковых сигналов сбора данных инициируется автоматически;
- этап приложения непрерывной низкочастотной вибрации инициируется только в случае, если сила соприкосновения между вибратором и вязкоупругой средой превышает заданную нижнюю пороговую величину;
- этап приложения непрерывной низкочастотной вибрации инициируется только в случае, если сила соприкосновения между вибратором и вязкоупругой средой находится в диапазоне между заданной нижней пороговой величиной и заданной верхней пороговой величиной;
- этап приложения низкочастотного импульса инициируется только в случае, если сила соприкосновения между вибратором и вязкоупругой средой превышает заданную нижнюю пороговую величину;
- нижняя и верхняя пороговые величины силы соприкосновения для приложения непрерывной вибрации обычно равны, соответственно, 1 Н и 10 Н;
- нижняя и верхняя пороговые величины силы соприкосновения для приложения низкочастотного импульса обычно равны, соответственно, 4 Н и 10 Н;
- частота непрерывной низкочастотной вибрации, cSWF, прикладываемой вибратором, находится в диапазоне 5-500 Гц;
- амплитуда непрерывной низкочастотной вибрации, прикладываемой вибратором, находится в диапазоне от 10 мкм до 5 мм;
- первая серия ультразвуковых сигналов сбора данных формируется повторением групп, включающих в себя по меньшей мере два ультразвуковых сигнала сбора данных, имеющих внутригрупповую частоту повторения импульсов в диапазоне от 500 Гц до 10 кГц, и первую частоту повторения импульсов в диапазоне от 10 Гц до 10 кГц;
- первая частота повторения импульсов имеет значение ниже частоты непрерывной вибрации;
- центральная частота tSWF низкочастотного импульса находится в диапазоне от 10 Гц до 1000 Гц;
- длительность импульса находится в диапазоне от 1/(2×tSWF) до 20/tSWF, где tSWF является центральной частотой низкочастотного импульса;
- частота повторения импульсов второй серии ультразвуковых импульсов находится в диапазоне от 500 Гц до 100 кГц;
- амплитуда низкочастотного импульса находится в диапазоне от 100 мкм до 10 мм;
- прекращение непрерывной вибрации вибратора и приложение низкочастотного импульса разделяются интервалом времени, причем интервал времени может быть не менее 10 мс и, предпочтительно, находится в диапазоне от 1 мс до 50 мс;
- амплитуда низкочастотного импульса определяется на основании свойств упругой волны, полученных при непрерывной вибрации.
Настоящее изобретение относится также к зонду для реализации способа гибридной эластографии в соответствии с изобретением. Зонд в соответствии с изобретением включает в себя:
- Первый вибратор, выполненный с возможностью приложения непрерывной низкочастотной вибрации к вязкоупругой среде, при этом непрерывная низкочастотная вибрация формирует упругую волну внутри вязкоупругой среды;
- Второй вибратор, выполненный с возможностью приложения к вязкоупругой среде низкочастотного импульса, формирующего нестационарную сдвиговую волну внутри вязкоупругой среды;
- Ультразвуковой преобразователь, выполненный с возможностью излучения:
первой серии ультразвуковых сигналов сбора данных, при этом упомянутая первая серия ультразвуковых сигналов сбора данных включает в себя группы ультразвуковых сигналов сбора данных, причем группы ультразвуковых сигналов сбора данных формируются с первой частотой повторения импульсов, и каждая группа ультразвуковых сигналов сбора данных включает в себя по меньшей мере один сигнал сбора данных;
второй серии ультразвуковых сигналов сбора данных, причем ультразвуковые сигналы сбора данных, составляющие вторую серию, формируются со второй частотой повторения импульсов;
причем упомянутый зонд дополнительно выполнен с возможностью прекращения приложения непрерывной вибрации до приложения низкочастотного импульса.
Зонд в соответствии с изобретением делает возможной реализацию способа в соответствии с изобретением.
В соответствии с одним вариантом осуществления, зонд в соответствии с изобретением включает в себя единственный вибратор, который используется как для приложения непрерывной вибрации к вязкоупругой среде на этапе гармонической эластографии, так и для приложения низкочастотного импульса на этапе импульсной эластографии.
Зонд выполнен так, что приложение низкочастотного импульса и прекращение непрерывной вибрации разделяются интервалом времени в диапазоне от 1 мс до 50 мс. Интервал времени составляет, предпочтительно, не менее 10 мс.
Ультразвуковой преобразователь используется для передачи первой и второй серий ультразвуковых сигналов сбора данных внутрь вязкоупругой среды. Тот же ультразвуковой преобразователь детектирует отраженные ультразвуковые сигналы для каждого ультразвукового сигнала сбора данных. Затем отраженные ультразвуковые сигналы обрабатываются для определения смещений вязкоупругой среды, вызываемых непрерывной низкочастотной вибрацией и низкочастотным импульсом.
Зонд для гибридной эластографии в соответствии с изобретением может также иметь одну или более из нижеприведенных характеристик, рассматриваемых по отдельности или в соответствии со всеми их технически возможными сочетаниями:
- вибратор является электродвигателем или звуковой катушкой, или электродинамическим приводом;
- ультразвуковой преобразователь установлен на оси вибратора;
- зонд для гибридной эластографии в соответствии с изобретением дополнительно включает в себя средство для включения приложения низкочастотного импульса;
- ультразвуковой преобразователь имеет форму круга с диаметром в диапазоне от 2 мм до 15 мм;
- ультразвуковой преобразователь имеет рабочую частоту в диапазоне от 1 MГц до 15 MГц;
- ультразвуковой преобразователь является конвексным абдоминальным зондом;
- первый и второй вибраторы являются осесимметричными;
- по меньшей мере, один из двух вибраторов является осесимметричным;
- по меньшей мере, один вибратор имеет ту же ось симметрии, что и ультразвуковой преобразователь;
- по меньшей мере, один вибратор имеет кольцевую форму и располагается вокруг ультразвукового преобразователя;
- зонд дополнительно включает в себя средство для вычисления и отображения индикатора позиционирования реального времени.
Настоящее изобретение относится также к устройству для гибридной эластографии, реалующему способ гибридной эластографии в соответствии с изобретением.
Такое гибридное устройство в соответствии с изобретением включает в себя:
- зонд для гибридной эластографии в соответствии с изобретением;
- центральный блок, соединенный с зондом и включающий в себя по меньшей мере вычислительное средство для обработки отраженных ультразвуковых сигналов, средство отображения и средство управления и/или ввода.
В соответствии с одним вариантом осуществления, средство отображения используется для отображения в реальном времени индикатора позиционирования реального времени.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Другие характеристики и преимущества изобретения будут очевидны из описания, которое приведено ниже в целях пояснения и ни в коей мере не для ограничения, со ссылкой на прилагаемые чертежи, на которых:
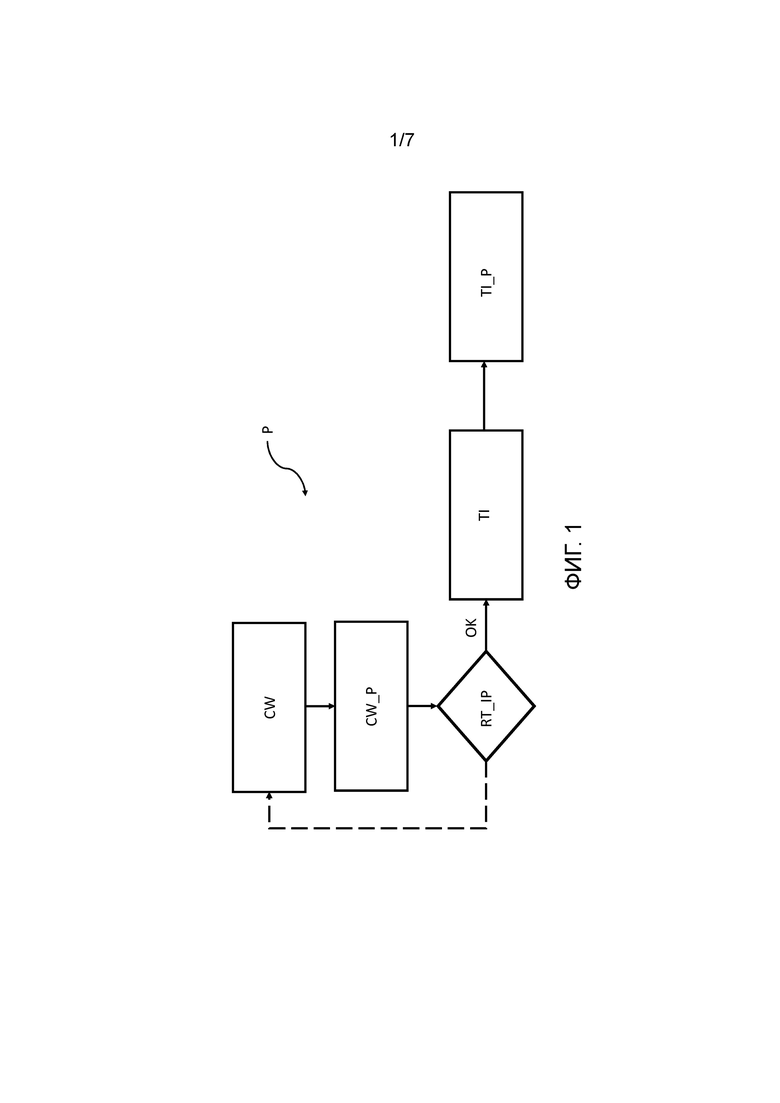
Фиг. 1 - представление этапов способа гибридной эластографии в соответствии с изобретением;
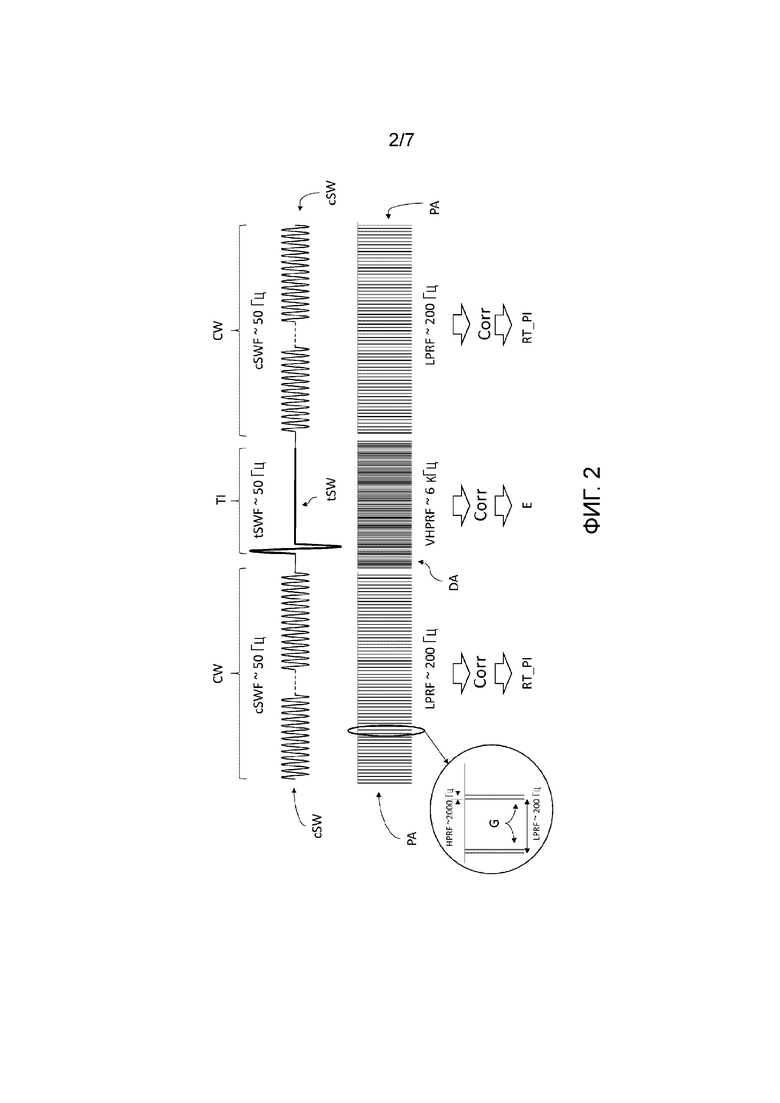
Фиг. 2 - схематичное изображение вибраций, прикладываемых вибратором, и ультразвуковых сигналов сбора данных при выполнении способа в соответствии с изобретением, показанного на фиг. 1;
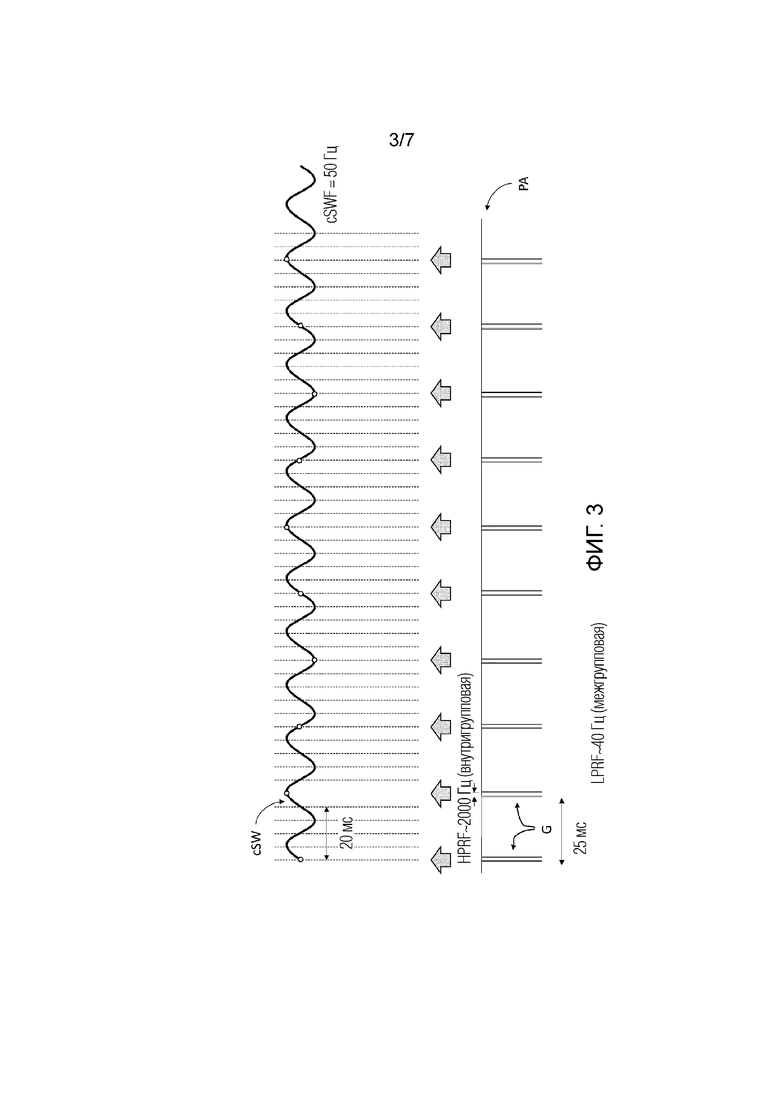
Фиг. 3 - схематичное изображение конкретного варианта осуществления способа эластографии, показанного на фиг. 1;
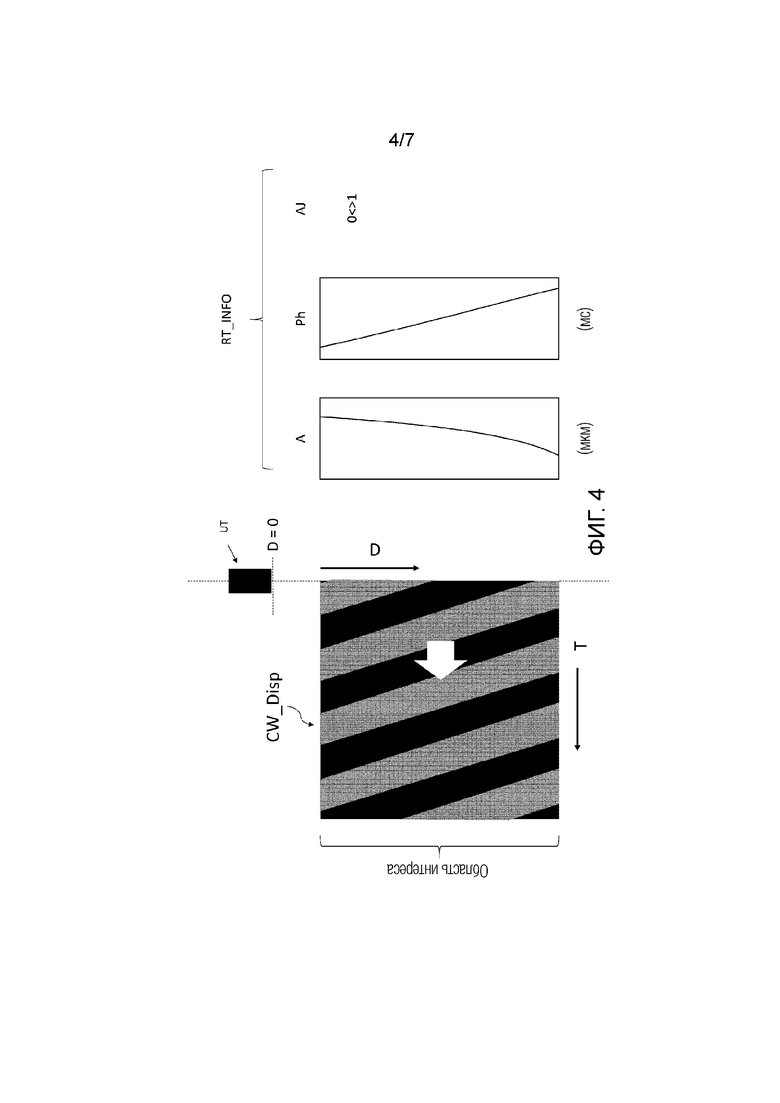
Фиг. 4 - представление результатов, полученных при выполнении части способа соответствии с изобретением по отношению к позиционированию вибратора;
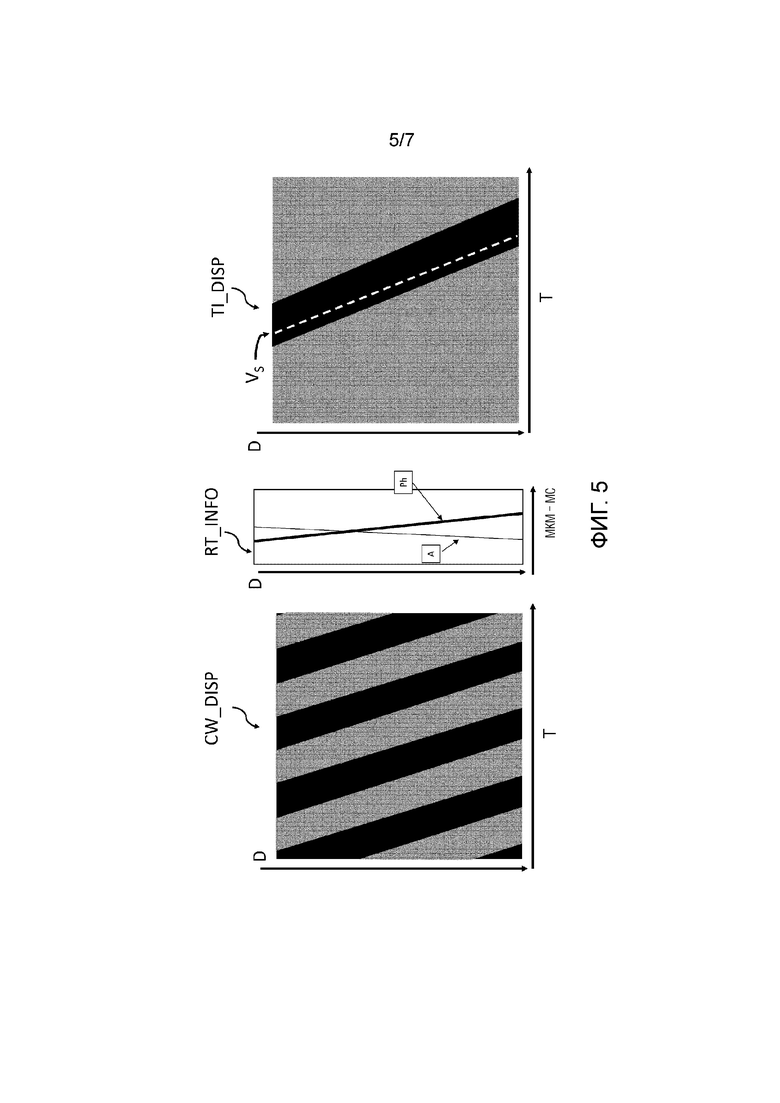
Фиг. 5 - представление результатов выполнения способа, показанного на фиг. 1;
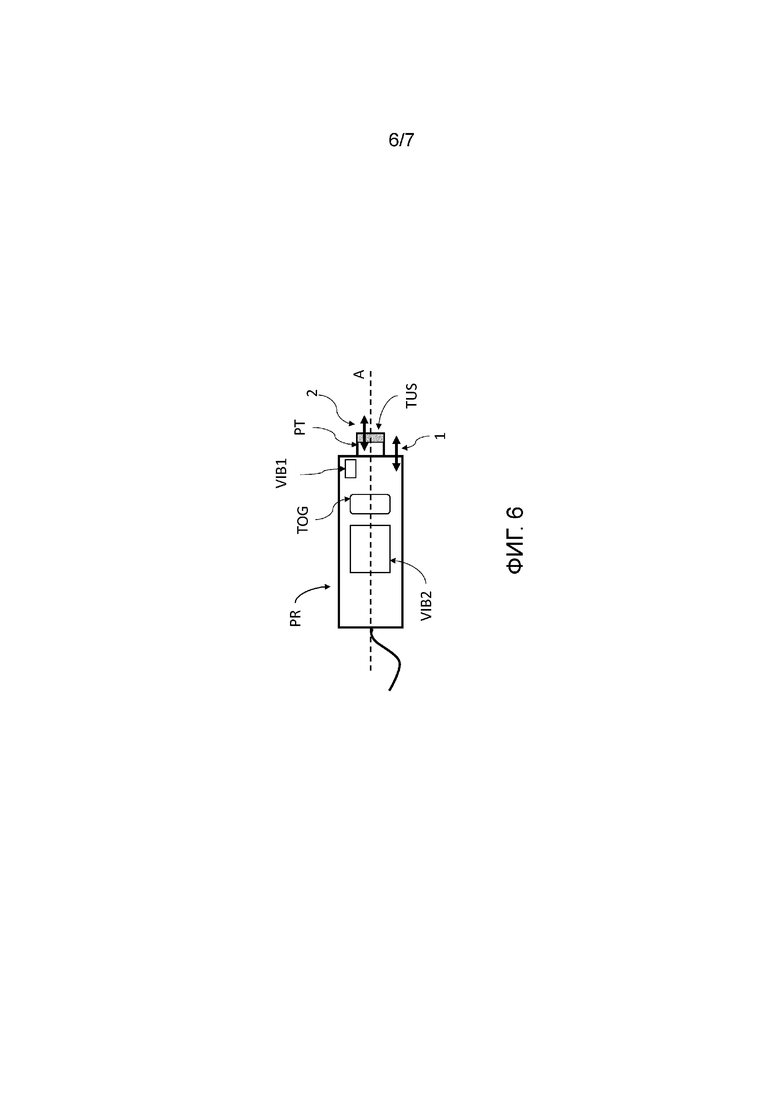
Фиг. 6 - представление зонда для гибридной эластографии в соответствии с изобретением;
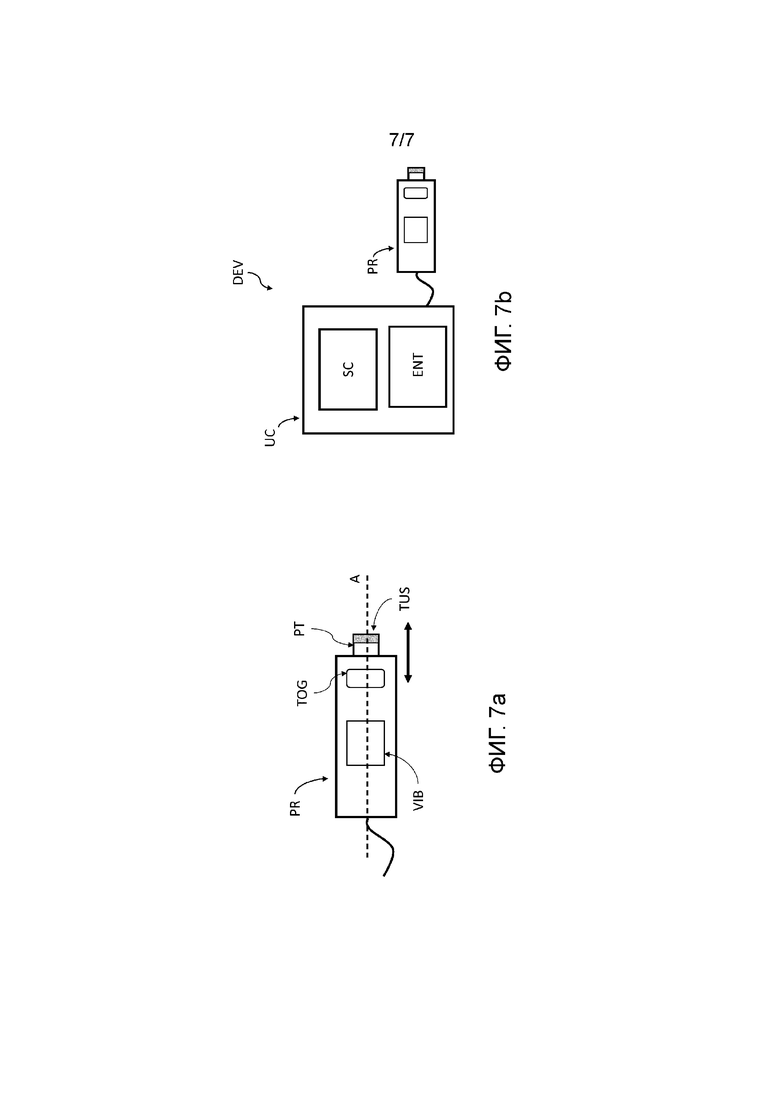
Фиг. 7a - представление конкретного варианта осуществления зонда для гибридной эластографии в соответствии с изобретением;
Фиг. 7b - представление устройства для гибридной эластографии в соответствии с изобретением.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Фиг. 1 изображает этапы способа P гибридной эластографии в соответствии с изобретением.
Первый этап CW способа P включает в себя приложение непрерывной низкочастотной вибрации с использованием первого вибратора, содержащегося в зонде, находящемся в контакте с вязкоупругой средой.
Частота непрерывной вибрации находится в диапазоне 5-500 Гц.
Первый этап CW способа P включает в себя формирование ультразвуковым преобразователем первой серии ультразвуковых сигналов сбора данных. Первая серия ультразвуковых сигналов сбора данных включает в себя группы ультразвуковых сигналов сбора данных. Группы ультразвуковых сигналов сбора данных излучаются с первой частотой LPRF (низкой частотой) повторения импульсов в диапазоне от 5 Гц до 500 Гц, при этом каждая группа включает в себя по меньшей мере один ультразвуковой сигнал сбора данных.
Ультразвуковой сигнал сбора данных включает в себя излучение ультразвукового импульса, с последующими детектированием и записью отраженных ультразвуковых сигналов или эхо-сигналов.
Приложение непрерывной вибрации к вязкоупругой среде формирует упругую волну внутри той же среды. Упругая волна формируется посредством суперпозиции сдвиговых волн и волн сжатия. Исследование свойств данной упругой волны дает возможность получить информацию о правильном позиционировании зонда относительно вязкоупругой среды.
Вязкоупругая среда, которую требуется охарактеризовать, рассеивает по меньшей мере частично, ультразвуковые импульсы. Поэтому можно детектировать ультразвуковые сигналы, отраженные во время излучения первой серии ультразвуковых сигналов сбора данных.
Детектирование отраженных ультразвуковых сигналов может выполняться с использованием того же ультразвукового преобразователя, который применяется для излучения.
Отраженные ультразвуковые сигналы, детектируемые на этапе CW формирования первой серии ультразвуковых сигналов сбора данных, обрабатываются на этапе CW_P определения по меньшей мере одного свойства упругой волны внутри вязкоупругой среды.
На данном этапе, отраженные ультразвуковые сигналы коррелируются друг с другом для того, чтобы измерять смещения вязкоупругой среды, вызываемые упругой волной, формируемой при приложении непрерывной вибрации, в соответствии с методом, известным в области эластографии и, в более общем смысле, ультразвуковых исследований.
Исходя из измеренных смещений внутри вязкоупругой среды, можно вычислить такие свойства упругой волны, как амплитуда и фаза в зависимости от положения внутри вязкоупругой среды. Положение точки внутри вязкоупругой среды измеряется как расстояние между ультразвуковым преобразователем, и упомянутая точка вычисляется вдоль направления распространения ультразвуковых волн, излучаемых преобразователем. По данной причине положение точки внутри вязкоупругой среды называется, в общем, глубиной.
Кроме того, можно определить другие параметры упругой волны внутри вязкоупругой среды, такие как фазовая скорость упругой волны.
Изменения амплитуды и фазы упругой волны могут быть вычислены в зависимости от глубины внутри ткани. Посредством выполнения коррекции теоретической модели по измеренным свойствам можно вычислить параметр качества коррекции. Исходя из данного параметра качества коррекции и/или других свойств упругой волны, можно вычислять индикатор RT_IP позиционирования реального времени вибратора относительно ткани, которую требуется охарактеризовать.
Вследствие использования низкой первой частоты LPRF повторения импульсов для первой серии ультразвуковых сигналов сбора данных можно вычислять индикатор RT_IP позиционирования реального времени в реальном времени.
В соответствии с одним вариантом осуществления, индикатор RT_IP позиционирования реального времени отображается одновременно с его вычислением. Иначе говоря, индикатор позиционирования реального времени вычисляется и отображается в реальном времени. Иначе говоря, этап вычисления индикатора позиционирования реального времени и этап отображения индикатора позиционирования реального времени выполняются одновременно.
Например, одна из используемых теоретических моделей предусматривает линейное изменение фазовой задержки на центральной частоте упругой волны в зависимости глубины в среде, которую требуется охарактеризовать. В данном случае, коррекция является линейной коррекцией, и параметр качества коррекции передает линейность фазы в зависимости от глубины в среде. Возможный индикатор является коэффициентом R2 детерминации, определяющим качество прогнозирования линейной регрессии кривой фазовой задержки в зависимости от глубины в диапазоне исследуемых глубин.
В соответствии с одним вариантом осуществления, этап CW_P определения по меньшей мере одного свойства упругой волны внутри ткани выполняется одновременно с этапом приложения непрерывной вибрации CW и детектирования первых отраженных ультразвуковых сигналов.
При посредстве способа P в соответствии с изобретением можно измерять в реальном времени свойства упругой волны внутри ткани и получать в реальном времени индикатор RT_IP позиционирования реального времени для зонда.
В качестве преимущества, низкая первая частота LPRF повторения импульсов дает возможность уменьшить объем данных, записываемых на этапе CW формирования первой серии ультразвуковых сигналов сбора данных, и обрабатывать эти данные в реальном времени для получения индикатора RT_IP позиционирования.
Если значение индикатора позиционирования является неудовлетворительным, то два этапа CW и CW_P повторяются, как показано штриховой стрелкой на фиг. 1.
Если значение индикатора позиционирования является удовлетворительным, то зонд позиционирован правильно относительно вязкоупругой среды, и измерение эластичности, выполненное на этапе транзиентной эластографии, будет достоверным. В данном случае, способ P в соответствии с изобретением предусматривает переход на этап TI.
В соответствии с одним вариантом осуществления, способ P в соответствии с изобретением включает в себя этап отображения в реальном времени индикатора RT_IP позиционирования. Вычисление индикатора RT_IP позиционирования и его отображение выполняются одновременно.
В соответствии с одним вариантом осуществления, частота обновления визуального отображения индикатора позиционирования является не ниже 5 Гц.
Этап TI, показанный на фиг. 1, включает в себя приложение низкочастотного импульса с использованием второго вибратора.
Подобно того, как в любом методе транзиентной эластографии, приложение низкочастотного импульса к вязкоупругой среде формирует нестационарную или импульсную сдвиговую волну, распространяющуюся внутри среды. Посредством измерения скорости распространения нестационарной сдвиговой волны внутри среды, которую требуется охарактеризовать, можно решить обратную задачу определения эластичности среды.
Важно заметить, что в процессе приложения низкочастотного импульса и последующих этапов, непрерывная низкочастотная вибрация прекращается. Прекращение непрерывной вибрации в процессе выполнения этапа транзиентной эластографии очень важно для обеспечения возможности разделения по времени волн сжатия и сдвиговых волн, что дает возможность получить надежное измерение эластичности среды.
В соответствии с одним вариантом осуществления, между прекращением непрерывной вибрации и приложением низкочастотного импульса существует интервал времени, составляющий от 1 мс до 50 мс и, предпочтительно, не менее 10 мс. Данный интервал времени допускает затухание волн сжатия, формируемых непрерывной вибрацией и повышает точность и надежность измерения такого вязкоупругого свойства, как скорость нестационарной сдвиговой волны.
Одновременно с приложением низкочастотного импульса, этап TI включает в себя формирование, с использованием ультразвукового преобразователя, второй серии ультразвуковых сигналов сбора данных, излучаемых со второй частотой VHPRF (очень высокой частотой) повторения импульсов.
Частота VHPRF повторения импульсов второй серии ультразвуковых сигналов сбора данных находится в диапазоне от 500 Гц до 100 кГц.
Исходя из отраженных ультразвуковых сигналов, детектируемых на этапе TI, можно вычислить по меньшей мере одно свойство вязкоупругой среды на этапе Ti_P способа P в соответствии с изобретением. Это можно сделать путем применения корреляционных методов, широко известных в эластографии. В частности, как поясняется, например, в документе «Transient elastography: a new non-invasive method for assessment of hepatic fibrosis», L. Sandrin et al., создается возможность вычислить скорость распространения сдвиговой волны и, следовательно, эластичность вязкоупругой среды.
Например, на этапе TI_P определения свойства вязкоупругой среды определяется скорость распространения импульсной сдвиговой волны, формируемой низкочастотным импульсом. По скорости распространения сдвиговой волны можно решить обратную задачу определения эластичности, модуля сдвига или модуля упругости вязкоупругой среды.
В соответствии с одним вариантом осуществления, этапы приложения низкочастотного импульса и формирования второй серии ультразвуковых сигналов сбора данных инициируются только в случае, если индикатор позиционирования удовлетворяет заданному условию.
В качестве преимущества, это дает возможность инициировать только достоверные измерения эластичности, так как существование нестационарной сдвиговой волны и ее правильное распространение обеспечиваются индикатором позиционирования.
Инициирование этапов приложения низкочастотного импульса и последующих этапов может быть автоматическим или ручным и активизируется, например, оператором на основании значения индикатора RT_IP позиционирования.
Если приложение низкочастотного импульса инициируется оператором, то индикатор позиционирования, вычисленный в реальном времени на этапе CW_P, отображается в реальном времени.
В соответствии с одним вариантом осуществления, для оператора может отображаться более простой сигнал типа «приемлемое позиционирование» или «неприемлемое позиционирование».
В соответствии с одним вариантом осуществления, частота обновления визуального отображения индикатора позиционирования превышает 5 Гц.
Это позволяет оператору инициировать измерение эластичности с момента, в который наблюдается правильное распространение сдвиговой волны, обеспечивающее достоверность измерения.
В соответствии с одним вариантом осуществления, непрерывная вибрация включается только в случае, если сила соприкосновения между вибратором и вязкоупругой тканью имеет значение выше заданной пороговой величины, которая обычно равна 1 Н.
В соответствии с одним вариантом осуществления, непрерывная вибрация включается только в случае, если сила соприкосновения между вибратором и вязкоупругой тканью имеет значение ниже заданной пороговой величины, которая обычно равна 10 Н.
В качестве преимущества, нижняя пороговая величина обеспечивает удовлетворительное сопряжение между зондом и вязкоупругой средой, и верхняя пороговая величина исключает искажение непрерывной вибрации, вызываемое избыточной силой соприкосновения, и повреждение исследуемой среды.
В соответствии с одним вариантом осуществления, низкочастотный импульс включается только в случае, если сила соприкосновения между вибратором и вязкоупругой тканью находится в диапазоне между заданной нижней пороговой величиной и заданной верхней пороговой величиной. Эти две пороговые величины обычно равны, соответственно, 4 Н и 8 Н.
В качестве преимущества, нижняя пороговая величина обеспечивает удовлетворительное сопряжение между зондом и вязкоупругой средой, и верхняя пороговая величина исключает искажение непрерывной вибрации, вызываемое избыточной силой соприкосновения, и повреждение исследуемой среды.
Вследствие непрерывного колебательного перемещения вибратора, определение силы соприкосновения между вибратором и средой является более сложной задачей, чем в случае стандартного способа транзиентной эластографии. В условиях присутствия непрерывной низкочастотной вибрации, сила соприкосновения между вибратором и вязкоупругой средой определяется по следующей формуле:
F=k(x+A×cos(2πflow∙t))
В данной формуле x означает смещение вибратора, k является постоянной упругости пружины, размещенной в зонде, A означает амплитуду непрерывной вибрации, и flow является частотой непрерывной вибрации.
Силу F можно измерить с использованием датчика силы, размещенного на зонде для гибридной эластографии. Последовательно, посредством применения низкочастотного фильтра для обработки сигнала, измеренного таким образом, можно исключить низкочастотную составляющую и вычислить среднюю силу соприкосновения:
FAverage=k(x).
В соответствии с одним вариантом осуществления способа P в соответствии с изобретением, низкочастотный импульс включается только в случае, если значение FAverage превышает заданную пороговую величину.
В качестве преимущества, применение минимального значения силы соприкосновения позволяет обеспечить удовлетворительное приложение низкочастотного импульса к вязкоупругой среде и правильное распространение нестационарной сдвиговой волны, формируемой внутри среды.
В соответствии с одним вариантом осуществления способа P в соответствии с изобретением, прекращение непрерывной вибрации вибратора и приложение низкочастотного импульса разделяются интервалом времени в диапазоне от 1 мс до 50 мс. Интервал времени, предпочтительно имеет значение не менее 10 мс.
В качестве преимущества, применение интервала времени, разделяющего прекращение непрерывной вибрации и приложение низкочастотного импульса, допускает затухание вибрации, формируемой непрерывной вибрацией. Поэтому можно прикладывать низкочастотный импульс и наблюдать распространение импульсной сдвиговой волны в условиях отсутствия упругой волны. Одновременное присутствие упругой волны, включающей в себя волну сжатия и нестационарную сдвиговую волну может вносить ошибку в измерение скорости распространения нестационарной сдвиговой волны.
Фиг. 2 схематично изображает:
- Непрерывную низкочастотную вибрацию cSW, прикладываемую первым вибратором на этапе CW, показанном на фиг. 1;
- Низкочастотный импульс tSW, прикладываемый вторым вибратором на этапе TI, показанном на фиг. 1;
- Первую серию ультразвуковых сигналов PA сбора данных, сформированную группами G ультразвуковых сигналов сбора данных и формируемых ультразвуковым преобразователем на этапе CW, показанном на фиг. 1;
- Вторую серию ультразвуковых сигналов DA сбора данных формируемых ультразвуковым преобразователем на этапе TI, показанном на фиг. 1.
На этапе CW приложения непрерывной вибрации, вибратор совершает колебания на частоте в диапазоне 5-500 Гц, с амплитудой в диапазоне от 10 мкм до 5 мм.
В качестве преимущества, благодаря низкой амплитуде и низкой частоте непрерывной вибрации, оператор может легко поддерживать зонд в контакте с вязкоупругой средой.
В соответствии с одним вариантом осуществления, один и тот же вибратор можно использовать для приложения непрерывной низкочастотной вибрации cSWF и низкочастотного импульса tSWF.
Одновременно с приложением непрерывной низкочастотной вибрации, ультразвуковой преобразователь излучает первую серию ультразвуковых сигналов PA сбора данных, сформированную группами G ультразвуковых сигналов сбора данных. В примере, показанном на фиг. 2, каждая группа G включает в себя два ультразвуковых сигнала сбора данных.
Группы G ультразвуковых сигналов сбора данных излучаются с первой частотой LPRF повторения импульсов в диапазоне от 10 Гц до 500 Гц. Ультразвуковые сигналы сбора данных, принадлежащие одной и той же группе G, излучаются с внутригрупповой частотой повторения импульсов HPRF находящаяся в диапазоне от 500 Гц до 10 кГц.
Ультразвуковой преобразователь также детектирует ультразвуковые сигналы, отраженные в процессе формирования ультразвуковых сигналов PA сбора данных, как поясняется со ссылкой на этап CW, показанный на фиг. 1. Исходя из первой серии ультразвуковых сигналов PA сбора данных, можно вычислить, на этапе корреляции Corr между ультразвуковыми сигналами, принадлежащими к одной и той же группе G, смещения, вызванные в вязкоупругой среде распространением упругой волны, сформированной непрерывной вибрацией, прикладываемой вибратором.
В качестве преимущества, посредством применения корреляционного метода к ультразвуковым сигналам сбора данных, принадлежащим к одной и той же группе G и, следовательно, сближенным во времени, можно детектировать небольшие смещения с величиной порядка от 1 мкм до 10 мкм.
Как поясняется со ссылкой на этап CW_P, показанный на фиг. 1, смещения вязкоупругой среды используются затем для вычисления свойств упругой волны, например, изменения их амплитуды и их фазы в зависимости от глубины в среде. Посредством сравнения измеренных свойств с теоретической моделью можно вычислять в реальном времени индикатор RT_IP позиционирования.
Например, индикатор позиционирования можно связан с линейностью фазы упругой волны в зависимости от глубины в среде, которую требуется охарактеризовать. Тогда индикатор зависит от качества коррекции изменения фазы в зависимости от глубины отрезком прямой.
Например, индикатор позиционирования можно связать со снижением амплитуды упругой волны в зависимости от глубины в среде, которую требуется охарактеризовать. Тогда индикатор зависит от качества подгонки к 1/Zn, где Z является глубиной, и n является целочисленным показателем в диапазоне от 1 до 3.
Например, значение индикатора RT_IP позиционирования реального времени находится в диапазоне от 0 до 1, при этом значения близки к 1, если зонд позиционирован правильно относительно представляющей интерес вязкоупругой среды.
Если значение индикатора RT_IP позиционирования реального времени считается удовлетворительным, например, выше заданной пороговой величины, то инициируется этап TI приложения низкочастотного импульса.
Центральная частота низкочастотного импульса tSFW находится в диапазоне от 10 Гц до 1000 Гц. Длительность низкочастотного импульса находится в диапазоне от 1/(2×tSFW) до 1/tSFW.
Амплитуда низкочастотного импульса находится в диапазоне от 100 мкм до 10 мм.
В соответствии с одним вариантом осуществления, амплитуда низкочастотного импульса может видоизменяться на основании свойств упругой волны, измеренной на этапе CW_P.
Амплитуда смещений, вызываемых распространением упругой волны, измеряется в зоне интереса. Например, полагают, что HAM является средней амплитудой, измеренной в зоне интереса, и HAR является опорной средней амплитудой в зоне интереса. Учитывая, что смещения, вызываемые распространением импульсной сдвиговой волны, могут измеряться с большим трудом, можно вычислить коэффициент b для применения к установленной величине низкочастотного импульса, чтобы амплитуда вызываемых смещений была оптимальной. Амплитуда AT установленной величины низкочастотного импульса вычисляется как функция от ATR, опорной амплитуды установленной величины, и коэффициент b вычисляется в соответствии с уравнениями:
и
AT=b×ATR.
Тогда установленная величина a(t) низкочастотного импульса определяется следующим образом для длительности импульса некоторого периода:
 .
.
Где f означает центральную частоту низкочастотного импульса, обозначенную также tSWF, и t представляет время.
В соответствии с одним вариантом осуществления, несколько низкочастотных импульсов могут формироваться последовательно, как описано в патентной заявке FR 1351405.
Как описано со ссылкой на этап TI способа P в соответствии с изобретением, показанный на фиг. 1, одновременно с приложением низкочастотного импульса и распространением нестационарной сдвиговой волны излучается вторая серия ультразвуковых сигналов DA сбора данных со второй частотой VHPRF повторения импульсов.
Вторая частота VHPRF повторения импульсов находится в диапазоне от 500 Гц до 100 кГц. Центральная частота каждого ультразвукового импульса находится в диапазоне от 1 MГц до 15 MГц.
Ультразвуковой преобразователь также детектирует отраженные ультразвуковые сигналы, происходящие от второй серии ультразвуковых сигналов DA сбора данных, как поясняется со ссылкой на этап TI, показанный на фиг. 1. Исходя из второй серии ультразвуковых сигналов сбора данных, на этапе корреляции Corr можно вычислить смещения вязкоупругой среды. Упомянутые смещения вязкоупругой среды вызываются распространением нестационарной сдвиговой волны, формируемой низкочастотным импульсом, прикладываемым вибратором. Как поясняется со ссылкой на этап TI_P, показанный на фиг. 1, затем смещения вязкоупругой среды используются для вычисления свойств нестационарной сдвиговой волны. В частности, можно вычислить скорость VS распространения сдвиговой волны и, следовательно, эластичность E представляющей интерес вязкоупругой среды. Кроме того, можно вычислить модуль упругости и/или модуль сдвига среды.
Как показано на фиг. 2, получив измерение эластичности E вязкоупругой среды, можно повторить способ посредством повторного начала с этапа приложения непрерывной вибрации CW, с последующим этапом приложения низкочастотного импульса (не показанного на фиг. 2).
Фиг. 3 представляет конкретный вариант осуществления этапов CW и CW_P способа P в соответствии с изобретением, называемого стробоскопическим режимом.
Непрерывная синусоидальная линия схематически представляет непрерывную вибрацию cSW, прикладываемую первым вибратором. Непрерывная вибрация cSW имеет, например, центральную частоту cSWF 50 Гц, соответствующую периоду 20 мс.
Непрерывные вертикальные линии представляют группы G ультразвуковых сигналов сбора данных, формирующих первую серию ультразвуковых сигналов PA сбора данных. Группы G излучаются с первой частотой LPRF повторения импульсов. В соответствии со стробоскопическим режимом сбора данных, первая частота LPRF повторения импульсов имеет значение ниже, чем центральная частота cSWF непрерывной вибрации.
Внутригрупповая частота повторения импульсов находится в диапазоне от 500 Гц до 100 кГц, что дает возможность измерять небольшие смещения с величиной порядка от 1 мкм до 10 мкм.
Белые кружки и стрелки вдоль непрерывной вибрации cSW соответствуют взятию замеров, выполняемому каждой группой G ультразвуковых сигналов сбора данных.
Вследствие того, что частота LPRF повторения импульсов в группах G имеет значение ниже центральной частоты непрерывной вибрации cSW, замеры непрерывной вибрации cSW можно брать исчерпывающим образом в конце нескольких периодов колебаний, как показано белыми кружками.
В качестве преимущества, стробоскопический режим дает возможность брать замеры непрерывной вибрации cSW исчерпывающим образом, при использовании первой низкой частоты LPRF повторения импульсов. Использованием низкой частоты повторения импульсов дает возможность обрабатывать отраженные сигналы в реальном времени и, таким образом, получать индикатор RT_IP позиционирования в реальном времени.
В соответствии с одним вариантом осуществления, первая частота LPRF повторения импульсов превышает центральную частоту непрерывной вибрации cSWF. Это позволяет, например, собирать данные о двух точках за период вибрации. Таким образом, получается более частое взятие замеров при таком же числе периодов вибрации или равное количество замеров при меньшем числе периодов колебаний.
Фиг. 4 схематически представляет результаты, полученные выполнением части способа P соответствии с изобретением в отношении к позиционированию вибратора.
График CW_DISP показывает смещение (или любой другой параметр перемещения, например, скорость, деформацию, скорость деформации) вязкоупругой среды в области интереса, ROI, в зависимости от глубины Z в среде и времени T. Смещения представляются с использованием псевдоцветной шкалы с более светлыми цветами, представляющими смещение вдоль положительного направления оси D. Смещения вызываются непрерывной низкочастотной вибрацией, прикладываемой вибратором, и измеряются ультразвуковым преобразователем UT, размещенным в контакте с поверхностью среды, в положении Z=0.
Из измеренного смещения CW_DISP в области интереса, ROI, внутри вязкоупругой среды можно выделять в реальном времени информацию RT_INFO, относящуюся к упругой волне, распространяющейся внутри среды и формируемой непрерывной вибрацией. Примерами таких свойств являются амплитуда A и фаза Ph упругой волны в зависимости от глубины внутри среды.
Посредством сравнения измеренных значений A и Ph с заданными пороговыми величинами можно определять индикатор позиционирования вибратора относительно вязкоупругой среды. Если значение индикатора позиционирования превышает заданную пороговую величину, то измерение эластичности среды методом транзиентной эластографии считается достоверным.
В качестве альтернативы, можно получать параметр AJ качества коррекции теоретической модели, описывающей амплитуду и фазу упругой волны, распространяющейся внутри среды, по измеренным величинам A и Ph. В данном случае, индикатор позиционирования получается по параметру AJ качества коррекции. Например, параметр качества коррекции является коэффициентом R² детерминации, показывающим качество прогнозирования линейной регрессии кривой фазовой задержки в зависимости от глубины в диапазоне исследуемых глубин.
В соответствии с одним вариантом осуществления, параметр AJ качества коррекции находится в диапазоне от 0 до 1.
После вычисления, индикатор позиционирования может отображаться в форме числа или буквы, или с помощью цветовой шкалы. В качестве альтернативы, индикатор позиционирования может быть простым визуальным указателем типа «приемлемое позиционирование», указывающим, что оператор может инициировать этап транзиентной эластографии.
Фиг. 5 представляет результаты, полученные при выполнении способа P в соответствии с изобретением.
График CW_DISP представляет смещения, измеренные в присутствии упругой волны в среде, как описано выше со ссылкой на фиг. 4.
График RT_INFO представляет амплитуду A и фазу Ph стационарной волны, измеряемой в реальном времени, как поясняется со ссылкой на фиг. 4. Исходя из графика RT_INFO, индикатор позиционирования можно вычислять и отображать в реальном времени.
График TI_DISP представляет измеренные смещения, следующие за приложением низкочастотного импульса, в зависимости от глубины D в среде и времени T. Иначе говоря, график TI_DISP представляет, так называемую, импульсную эластограмму. Смещения представляются с использованием псевдоцветной шкалы и соответствуют распространению нестационарной сдвиговой волны внутри вязкоупругой среды.
По смещениям TI_DISP можно вычислить скорость распространения Vs нестационарной сдвиговой волны решить обратную задачу определения эластичности среды.
Как поясняется со ссылкой на фиг. 1, 2 и 3, в процессе выполнения способа P в соответствии с изобретением, графики CW_DISP, RT_INFO и индикатор позиционирования вибратора вычисляются и отображаются одновременно.
В качестве преимущества, благодаря структуре первой серии ультразвуковых сигналов сбора данных, индикатор RT_IP позиционирования, а также график RT_INFO могут вычисляться и отображаться computed в реальном времени.
В противном случае, отображаются только график TI_DISP и результат вычисления скорости распространения сдвиговой волны Vs, если положение вибратора, обращенного к вязкоупругой среде, проверяется, и если инициирован этап TI.
Фиг. 5 может также рассматриваться как графическое представление результатов, полученных в процессе выполнения способа P в соответствии с изобретением, и отображаться на экране и учитываться оператором во время обследования или измерения.
Фиг. 6 схематически представляет зонд для гибридной эластографии PR.
Зонд PR включает в себя:
- Первый вибратор VIB1, выполненный с возможностью приложения непрерывной низкочастотной вибрации к вязкоупругой среде, при этом непрерывная низкочастотная вибрация формирует упругую волну внутри вязкоупругой среды;
- Второй вибратор VIB2, выполненный с возможностью приложения к вязкоупругой среде низкочастотного импульса, формирующего нестационарную сдвиговую волну внутри вязкоупругой среды;
- Ультразвуковой преобразователь TUS, выполненный с возможностью излучения:
первой серии ультразвуковых сигналов сбора данных, причем упомянутая первая серия ультразвуковых сигналов сбора данных включает в себя группы ультразвуковых сигналов сбора данных, причем группы ультразвуковых сигналов сбора данных формируются с первой частотой повторения импульсов, и каждая группа ультразвуковых сигналов сбора данных включает в себя по меньшей мере один сигнал сбора данных;
второй серии ультразвуковых сигналов сбора данных, причем ультразвуковые сигналы сбора данных, составляющие вторую серию, формируются со второй частотой повторения импульсов;
причем упомянутый зонд дополнительно выполнен с возможностью прекращения приложения непрерывной вибрации до приложения низкочастотного импульса.
В соответствии с вариантом осуществления, показанным на фиг. 6, ультразвуковой преобразователь TUS установлен на оси вибратора VIB2, прикладывающего низкочастотный импульс.
В соответствии с одним вариантом осуществления, ультразвуковой преобразователь TUS может быть закреплен к корпусу зонда с использованием наконечника PT зонда.
Первый вибратор VIB1 вынуждает зонд PR колебаться. Во время этих колебаний, ультразвуковой преобразователь TUS прижимается к вязкоупругой среде, с приложением непрерывной низкочастотной вибрации и созданием упругой волны внутри среды.
В соответствии с одним вариантом осуществления, первый вибратор VIB1 для приложения непрерывной низкочастотной вибрации включает в себя вибрационное кольцо, размещенное вокруг ультразвукового преобразователя TUS или вокруг наконечника PT зонда.
Второй вибратор VIB2 может прикладывать низкочастотный импульс к вязкоупругой среде в соответствии с несколькими вариантами осуществления.
В соответствии с первым вариантом осуществления, наконечник PT зонда является подвижным и может приводиться в движение вторым вибратором VIB2. В таком случае, ультразвуковой преобразователь TUS прижимается к вязкоупругой среде, чтобы прикладывать вибрацию в направлении по стрелке 2 на фиг. 6.
В соответствии со вторым вариантом осуществления, зонд PR является инерционным зондом без подвижных частей. В данном случае, перемещение второго вибратора VIB2 внутри зонда PR приводит к перемещению зонда, и непрерывная или импульсная вибрация снова прикладывается посредством нажима преобразователем TUS на вязкоупругую среду.
Ось перемещения вибратора A является осью симметрии ультразвукового преобразователя TUS. Например, ультразвуковой преобразователь TUS может иметь круглое сечение, при этом ось A проходит через центр ультразвукового преобразователя TUS.
В соответствии с одним вариантом осуществления, зонд PR включает в себя средство TOG управления для включения приложения низкочастотного импульса, например, на этапе TI способа в соответствии с изобретением.
Фиг. 7a схематически представляет вариант осуществления зонда PR для гибридной эластографии в соответствии с изобретением.
Зонд PR включает в себя:
- Вибратор VIB для приложения непрерывной или импульсной вибрации к представляющей интерес вязкоупругой среде;
- Ультразвуковой преобразователь TUS для излучения ультразвуковых импульсов и детектирования отраженных ультразвуковых сигналов.
Таким образом, зонд PR в соответствии с фиг. 7a включает в себя единственный вибратор, предназначенный для приложения как непрерывной низкочастотной вибрация, так и низкочастотного импульса.
В соответствии с одним вариантом осуществления, диаметр ультразвукового преобразователя находится в диапазоне 2-15 мм.
В соответствии с одним вариантом осуществления центральная частота ультразвукового преобразователя находится в диапазоне от 1 MГц до 15 MГц.
В соответствии с одним вариантом осуществления, ультразвуковой преобразователь TUS является конвексным абдоминальным зондом.
В соответствии с одним вариантом осуществления зонда PR по меньшей мере один из вибраторов является осесимметричным. Иначе говоря по меньшей мере один вибратор имеет ось симметрии.
В соответствии с одним вариантом осуществления, ось симметрии осесимметричного вибратора соответствует оси симметрии ультразвукового преобразователя TUS.
В соответствии с одним вариантом осуществления по меньшей мере один из вибраторов зонда имеет кольцевую форму и располагается вокруг ультразвукового преобразователя TUS.
В соответствии с одним вариантом осуществления, зонд дополнительно включает в себя средство вычисления и отображения для вычисления и отображения индикатора RT_IP позиционирования реального времени.
Например, средство вычисления включает в себя по меньшей мере один микропроцессора и одну память.
Например, средство отображения включает в себя экран и/или индикатор позиционирования.
В соответствии с одним вариантом осуществления, зонд включает в себя индикатор позиционирования, который включается, когда зонд позиционирован правильно. Данный индикатор может быть визуальным индикатором, таким как изменение цвета диодов. В качестве альтернативы, индикатор может быть звуковым или тактильным индикатором, таким как изменение типа или амплитуды вибрации.
Фиг. 7b изображает устройство DEV для гибридной эластографии в соответствии с изобретением. Устройство DEV в соответствии с изобретением включает в себя:
- Зонд PR в соответствии с изобретением;
- Центральный блок UC, соединенный с зондом PR.
Центральный блок может включать в себя:
- Средство вычисления для обработки отраженных ультразвуковых сигналов;
- Экран SC для отображения результатов, полученных на разных этапах способа P в соответствии с изобретением;
- Средство ENT управления или ввода для операторского управления устройством.
Центральный блок UC может быть соединен с зондом PR проводной линией или средством беспроводной связи.
В соответствии с одним вариантом осуществления, экран SC пригоден для отображения результатов, показанных на фиг. 5. Экран SC может также отображать в реальном времени индикатор RT_IP позиционирования, вычисленный на этапе CW_P способа P в соответствии с изобретением.
В соответствии с одним вариантом осуществления, центральный блок включает в себя средство, выполненное с возможностью автоматическогот включения приложения низкочастотного импульса на основании значения индикатора RT_IP позиционирования, вычисленного и отображаемого в реальном времени.
Группа изобретений относится к медицине. Способ гибридной эластографии включает в себя следующие этапы: приложение непрерывной низкочастотной вибрации и формирование с использованием ультразвукового преобразователя, находящегося в контакте с вязкоупругой средой, первой серии ультразвуковых сигналов сбора данных; приложение низкочастотного импульса и формирование с использованием ультразвукового преобразователя второй серии ультразвуковых сигналов сбора данных; причем непрерывная вибрация, прикладываемая первым вибратором, прекращается до приложения низкочастотного импульса. Зонд для гибридной эластографии включает в себя: первый вибратор, выполненный с возможностью приложения непрерывной низкочастотной вибрации к вязкоупругой среде, при этом непрерывная низкочастотная вибрация формирует упругую волну внутри вязкоупругой среды; второй вибратор, выполненный с возможностью приложения к вязкоупругой среде низкочастотного импульса, формирующего нестационарную сдвиговую волну внутри вязкоупругой среды; ультразвуковой преобразователь, выполненный с возможностью излучения: первой серии ультразвуковых сигналов сбора данных; второй серии ультразвуковых сигналов сбора данных; причем упомянутый зонд дополнительно выполнен с возможностью прекращения приложения непрерывной вибрации до приложения низкочастотного импульса. Устройство для гибридной эластографии включает в себя: зонд для гибридной эластографии; центральный блок, соединенный с зондом и включающий в себя средство вычисления для обработки отраженных ультразвуковых сигналов, средство отображения и средство управления и/или ввода. Применение данной группы изобретений обеспечит оптимальное определение местонахождения ткани. 3 н. и 15 з.п. ф-лы, 7 ил.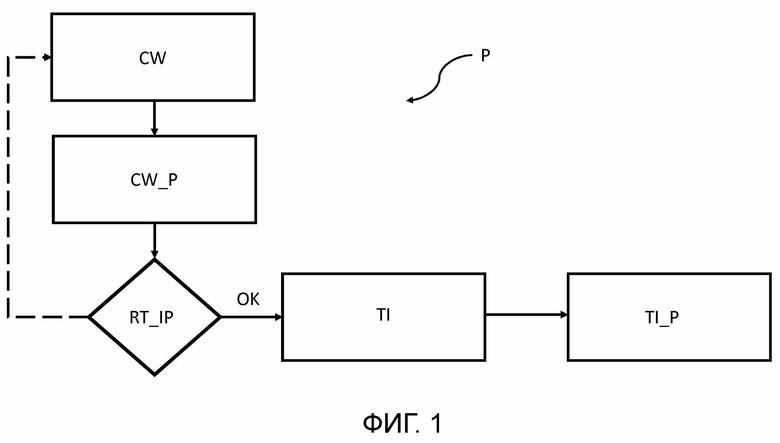
1. Способ (P) гибридной эластографии, включающий в себя следующие этапы:
приложение с использованием первого вибратора, содержащегося в зонде, находящемся в контакте с вязкоупругой средой, непрерывной низкочастотной вибрации и формирование (CW) с использованием ультразвукового преобразователя, находящегося в контакте с вязкоупругой средой, первой серии ультразвуковых сигналов сбора данных, при этом упомянутая первая серия ультразвуковых сигналов сбора данных включает в себя группы ультразвуковых сигналов сбора данных, причем группы ультразвуковых сигналов сбора данных формируются с первой частотой повторения импульсов, причем каждая группа ультразвуковых сигналов сбора данных включает в себя по меньшей мере один сигнал сбора данных, и непрерывная низкочастотная вибрация формирует упругую волну внутри вязкоупругой среды;
определение (CW_P) из первой серии ультразвуковых сигналов сбора данных по меньшей мере одного свойства упругой волны внутри вязкоупругой среды, причем свойство упругой волны внутри вязкоупругой среды служит для вычисления индикатора (RT_IP) позиционирования реального времени зонда относительно вязкоупругой среды, подлежащей исследованию;
приложение с использованием второго вибратора, содержащегося в зонде, находящемся в контакте с вязкоупругой средой, низкочастотного импульса и формирование (TI) с использованием ультразвукового преобразователя второй серии ультразвуковых сигналов сбора данных, причем ультразвуковые сигналы сбора данных, составляющие вторую серию, формируются со второй частотой повторения импульсов, и низкочастотный импульс формирует нестационарную сдвиговую волну, распространяющуюся внутри вязкоупругой среды.
2. Способ по предыдущему пункту, отличающийся тем, что непрерывная низкочастотная вибрация, прикладываемая первым вибратором, прекращается до приложения низкочастотного импульса вторым вибратором и формирования второй серии ультразвуковых сигналов сбора данных.
3. Способ (P) гибридной эластографии по одному из предыдущих пунктов, дополнительно включающий в себя следующий этап: определение (TI_P) из второй серии ультразвуковых сигналов сбора данных по меньшей мере одного свойства нестационарной сдвиговой волны.
4. Способ (P) гибридной эластографии по одному из предыдущих пунктов, отличающийся тем, что один и тот же вибратор применяется для приложения непрерывной низкочастотной вибрации и низкочастотного импульса.
5. Способ (P) гибридной эластографии по предыдущему пункту, отличающийся тем, что он включает в себя этап отображения в реальном времени индикатора (RT_IP) позиционирования реального времени.
6. Способ (P) гибридной эластографии по предыдущему пункту, отличающийся тем, что этап (TI) приложения низкочастотного импульса и формирования второй серии ультразвуковых сигналов сбора данных инициируется только в случае, если индикатор позиционирования удовлетворяет заданному условию.
7. Способ (P) гибридной эластографии по предыдущему пункту, отличающийся тем, что этап (TI) приложения низкочастотного импульса и формирования второй серии ультразвуковых сигналов сбора данных инициируется автоматически.
8. Способ (P) гибридной эластографии по одному из предыдущих пунктов, отличающийся тем, что этап приложения непрерывной низкочастотной вибрации инициируется, только если сила соприкосновения между вибратором и вязкоупругой средой превышает заданную нижнюю пороговую величину.
9. Способ (P) гибридной эластографии по одному из предыдущих пунктов, отличающийся тем, что этап приложения низкочастотного импульса инициируется только в случае, если сила соприкосновения между вибратором и вязкоупругой средой находится в диапазоне между заданной нижней пороговой величиной и заданной верхней пороговой величиной.
10. Способ (P) гибридной эластографии по одному из предыдущих пунктов, отличающийся тем, что первая серия ультразвуковых сигналов сбора данных формируется повторением групп, включающих в себя по меньшей мере два ультразвуковых сигнала сбора данных, имеющих внутригрупповую частоту (HPRF) повторения импульсов в диапазоне от 500 Гц до 10 кГц, и первая частота (LPRF) повторения импульсов находится в диапазоне от 10 Гц до 10 кГц.
11. Способ (P) гибридной эластографии по одному из предыдущих пунктов, отличающийся тем, что первая частота повторения импульсов имеет значение ниже частоты (cSWF) непрерывной вибрации.
12. Способ (P) гибридной эластографии по предыдущему пункту, отличающийся тем, что амплитуда низкочастотного импульса определяется на основании свойств упругой волны, формируемой внутри вязкоупругой среды непрерывной низкочастотной вибрацией.
13. Способ (P) гибридной эластографии по одному из пп. 2-12, отличающийся тем, что прекращение непрерывной вибрации вибратора и приложение низкочастотного импульса разделяются интервалом времени более 10 мс.
14. Зонд (PR) для гибридной эластографии, включающий в себя:
первый вибратор, выполненный с возможностью приложения непрерывной низкочастотной вибрации к вязкоупругой среде, при этом непрерывная низкочастотная вибрация формирует упругую волну внутри вязкоупругой среды;
второй вибратор, выполненный с возможностью приложения к вязкоупругой среде низкочастотного импульса, формирующего нестационарную сдвиговую волну внутри вязкоупругой среды;
ультразвуковой преобразователь, выполненный с возможностью излучения:
первой серии ультразвуковых сигналов сбора данных, причем упомянутая первая серия ультразвуковых сигналов сбора данных включает в себя группы ультразвуковых сигналов сбора данных, причем группы ультразвуковых сигналов сбора данных формируются с первой частотой повторения импульсов, причём каждая группа ультразвуковых сигналов сбора данных включает в себя по меньшей мере один сигнал сбора данных;
второй серии ультразвуковых сигналов сбора данных, причем ультразвуковые сигналы сбора данных, составляющие вторую серию, формируются со второй частотой повторения импульсов;
причем упомянутый зонд дополнительно выполнен с возможностью прекращения приложения непрерывной вибрации до приложения низкочастотного импульса.
15. Зонд (PR) для гибридной эластографии по предыдущему пункту, отличающийся тем, что по меньшей мере один вибратор имеет ту же ось симметрии, что и ультразвуковой преобразователь.
16. Зонд (PR) для гибридной эластографии по п. 14 или 15, отличающийся тем, что по меньшей мере один вибратор имеет кольцевую форму и расположен вокруг ультразвукового преобразователя.
17. Зонд (PR) для гибридной эластографии по одному из пп. 14-16, отличающийся тем, что зонд дополнительно включает в себя средство для вычисления и отображения индикатора (RT_IP) позиционирования.
18. Устройство (DEV) для гибридной эластографии, включающее в себя:
зонд для гибридной эластографии (PR) по п. 14;
центральный блок (UC), соединенный с зондом (PR) и включающий в себя по меньшей мере средство вычисления для обработки отраженных ультразвуковых сигналов, средство (SC) отображения и средство (ENT) управления и/или ввода.
| US 20160262706 A1, 15.09.2016 | |||
| Laurent Sandrin, et al | |||
| Transient elastography: a new noninvasive method for assessment of hepatic fibrosis/ Ultrasound Med Biol | |||
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Pengfei Song, et al | |||
| Fast shear compounding using directional filtering and two-dimensional shear wave speed calculation | |||
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
