Область техники
Изобретение относится к системе транспортировки для герметичного замкнутого пространства, определяющего замкнутый объем, предназначенный для соединения с другим замкнутым объемом, причем герметичное замкнутое пространство содержит устройство для герметичного соединения между двумя замкнутыми объемами, Изобретение также относится к замкнутому пространству, содержащему такую систему, способу приведения в действие упомянутой системы транспортировки и способу транспортировки.
В определенных секторах промышленности, среди которых могут быть упомянуты ядерная энергетика, медицинская промышленность, фармацевтическая и пищевая отрасли экономики, необходимо или желательно выполнять определенные процессы в замкнутом пространстве, либо для защиты персонала, например, от воздействия радиоактивности, токсичности и т.д., или наоборот, для получения возможности выполнять данные процессы в асептической или беспылевой атмосфере, или оба процесса одновременно.
При транспортировании устройства или продукта из одного замкнутого объема в другой необходимо решить сложную техническую задачу, заключающуюся в обеспечении герметичности каждого из этих объемов в любой момент по отношению к внешней среде. Данная техническая задача может быть решена с помощью двухдверного устройства соединения.
Такое двухдверное устройство, снабженное множеством средств для обеспечения безопасности, например, описано в документе FR 2695343. Каждый объем герметизируют дверью, установленной во фланце. Каждая дверь соединена со своим фланцем байонетным соединением, и два фланца предназначены для соединения друг с другом байонетным соединением. Эта система также обозначена как порт быстрой передачи (RTP).
В случае, когда один из замкнутых объемов образован контейнером и другой объем сформирован перчаточной камерой, передачу выполняют следующим образом. Фланец контейнера содержит на своей внешней периферии ушки, предназначенные для взаимодействия с соответствующей формой фланца перчаточной камеры. Фланец контейнера вводят во фланец перчаточной камеры, контейнер ориентирован так, чтобы ушки соответствовали соответствующей форме. Первый поворот контейнера вдоль оси его дверцы позволяет соединить фланец контейнера с фланцем перчаточной камеры байонетным соединением. Посредством второго поворота контейнера вдоль той же оси и непрерывно с первым поворотом дверь контейнера поворачивается относительно контейнера, обеспечивая как соединение другим байонетным соединением с дверью перчаточной камеры, так и разъединение новой сборки, образованной двумя пристыкованными дверями лицом к лицу фланцам дверцы и перчаточной камеры. Ручка управления, расположенная в перчаточной камере, позволяет разблокировать предохранительный механизм и освободить проход между двумя объемами. В случае асептической атмосферы, наружные поверхности двух дверей, соприкасающиеся друг с другом герметичным образом, не могут загрязнять внутренние объемы.
Этот тип замкнутого пространства используют для изготовления продуктов в регулируемой среде, например, в области фармацевтики для изготовления лекарств и их упаковки. Линии наполнения, например, расположены в замкнутых пространствах. Предметы, находящиеся снаружи, могут затем быть перемещены во внутреннюю часть замкнутого пространства, например, бутылки или герметичной упаковки. Предметы содержатся в контейнере, снабженном фланцем и дверцей, причем фланец герметично соединен с фланцем замкнутого пространства. Для облегчения перемещения предметов, например, для их заливки в вибрирующую чашу линии наполнения, в замкнутом пространстве используют систему транспортировки, содержащую элемент, образующий воронку, называемый желобом, который упирается на или расположен во фланце внутри замкнутого пространства для приема предметов, поступающих из контейнера, и направления их к месту назначения, например, вибрирующей чаше.
Пример такой системы транспортировки описан в документе US 8 950 624. Желоб шарнирно прикреплен к стенке замкнутого пространства между стыковочным положением, в котором он стыкуется с фланцем замкнутого пространства и граничит с отверстием замкнутого пространства, и отведенным или исходным положением, в который желоб отодвигается от отверстия замкнутого пространства, чтобы не препятствовать установке обратно на место двери замкнутого пространства.
Желоб закреплен на рычаге, который шарнирно закреплен на стенке замкнутого пространства. Рычаг может приводиться в действие снаружи с помощью рукоятки. Когда требуется установить желоб на отверстие, поворачивают рычаг в направлении стенки, желоб, который образует жесткую сборку с рычагом, откидывается назад к стене и прикладывается к фланцу замкнутого пространства и ограничивает его открытие. Для отведения желоба, рычаг смещают в противоположном направлении. Система транспортировки имеет определенный объем, что создает условия для конфигурации объема замкнутого пространства, в частности с точки зрения размеров, так что система транспортировки в исходном положении не препятствует операциям обработки в замкнутом пространстве.
Раскрытие изобретения
Задачей изобретения является создание системы транспортировки для герметичного замкнутого пространства, содержащего устройство для герметичного соединения, обеспечивающее большую свободу при изготовлении замкнутого пространства.
Поставленная задача решается средством транспортировки, предназначенным для установки в герметичном замкнутом пространстве, содержащем устройство для герметичного соединения с замкнутым объемом, и включающим в себя рычаг, установленный одним продольным концом шарнирно с возможностью поворота на стенке замкнутого пространства, и желоб, установленный шарнирно с возможностью поворота на уровне другого продольного конца рычага, и средство для поворота рычага относительно стенки и средство для поворота желоба относительно рычага между его исходным положением и стыковочным положением.
Благодаря повороту желоба относительно рычага он может быть ориентирован в исходное положение для уменьшения габаритов системы транспортировки и, таким образом, можно уменьшить ограничения в конструкции замкнутого пространства, в частности, уменьшить объем для размещения системы транспортировки и, таким образом, уменьшить объем замкнутого пространства.
Другими словами, ориентация желоба осуществляется, по меньшей мере, частично независимо от ориентации рычага, путем добавления шарнира между рычагом и желобом, что позволяет выполнить систему транспортировки, имеющую большую приспособляемость и предложить большую свободу по конструированию замкнутого пространства.
В частности, в предпочтительно варианте выполнения система транспортировки поддерживает желоб в заданной ориентации относительно устройства соединения. Например, рычаг шарнирно закреплен на стенке, несущей устройство соединения, и система транспортировки содержит средство, обеспечивающее перемещение желоба, так что желоб постоянно сохраняет параллельную ориентацию относительно устройства соединения и, таким образом, стенки, несущей устройство. Таким образом, в исходном положении желоб перемещается ближе к стенке и проходит в направлении внутрь замкнутого пространства, а не наружу замкнутого пространства, что, таким образом, не требует дополнительного обеспечения объема конкретно для размещения системы транспортировки.
Например, средство для обеспечения параллельного перемещения стыковочной кромки желоба содержит шестерни и валы.
В предпочтительном варианте выполнения приведение в действие системы транспортировки выполняется электродвигателем.
В способе транспортировки, например, поддержание желоба в фиксированной ориентации обеспечивается во время его перемещения из исходного состояния в стыковочное состояние с устройством соединения, в котором ось желоба и/или ось стыковочной кромки желоба выровнена с продольной осью отверстия.
Например, желоб перемещается, по существу, вертикально между исходным положением и стыковочным положением, затем желоб и рычаг одновременно поворачиваются вокруг своей оси поворота, обеспечивая размещение стыковочной кромки желоба параллельно отверстию соединения и стенки, если отверстие и стенка находятся в одной плоскости. Желоб может быть опущен для перехода из исходного состояния в стыковочное состояние и наоборот.
Первым объектом изобретения является система транспортировки для герметичного замкнутого пространства, определяющего первый замкнутый объем и включающего в себя по меньшей мере одно устройство для герметичного соединения, приспособленного для соединения первого замкнутого объема со вторым замкнутым объемом, при этом система транспортировки предназначена для размещения в указанном замкнутом пространстве и содержит:
по меньшей мере один рычаг, приспособленный для установки с возможностью поворота на стенке герметичного замкнутого пространства посредством первого поворотного шарнира с первой осью поворота,
желоб, включающий в себя стыковочную кромку, выполненную с возможностью взаимодействия с устройством для герметичного соединения, и заливную кромку; и
второй поворотный шарнир, расположенный между рычагом и желобом и имеющий вторую ось поворота.
Кроме того, система содержит средство для поворота рычага и желоба вокруг первой оси шарнира и второй оси шарнира.
Кроме того, первая ось поворота и вторая ось поворота параллельны.
Кроме того, система содержит средство сохранения ориентации для сохранения ориентации желоба во время его смещения в замкнутом пространстве.
Стыковочная кромка имеет продольную ось, при этом средство сохранения ориентации выполнено так, что продольная ось стыковочной кромки выровнена с осью отверстия устройства соединения и/или перпендикулярна стенке замкнутого пространства, в котором установлено устройство для герметичного соединения.
Например, ориентация средства сохранения ориентации такова, что стыковочная кромка смещена в плоскостях, параллельных друг другу.
Согласно варианту выполнения средство сохранения ориентации содержит механизм между первой внутренней осью, проходящей вдоль первой оси поворота, и второй внутренней осью, проходящей вдоль второй оси поворота, при этом вторая внутренняя ось соединена с возможностью вращения с желобом. Механизм содержит внутренний вал, соединенный с первой внутренней осью и со второй внутренней осью посредством угловых передач.
В другом варианте выполнения механизм содержит зубчатый ремень или цепь, зацепленные с первой внутренней осью и второй внутренней осью, при этом первая внутренняя ось и вторая внутренняя ось являются шлицевыми.
Система содержит привод, включающий в себя по меньшей мере один электродвигатель для поворота системы вокруг первой оси поворота.
Кроме того, система содержит первый электродвигатель для перемещения рычага вокруг первой оси поворота и второй электродвигатель для перемещения желоба вокруг второй оси поворота.
Кроме того, система содержит средство для обнаружения конфигурации системы транспортировки и/или открытого состояния устройства соединения.
Другим объектом изобретения является замкнутое пространство, определяющее первый замкнутый объем и содержащей устройство для герметичного соединения со вторым замкнутым объемом, при этом устройство соединения установлено на стенке этого замкнутого пространства и содержит вышеуказанную систему транспортировки.
Например, первый поворотный шарнир системы транспортировки закреплен на стенке, в которой установлено устройство соединения.
Кроме того, устройство соединения содержит средство байонетного соединения.
Другим объектом изобретения является система изолятора, содержащая устройство для герметичного соединения с блоком локализации, систему транспортировки и другой блок локализации.
Другим объектом изобретения также является способ приведения в действие системы транспортировки, установленной на стенке замкнутого пространства, определяющего первый замкнутый объем и содержащего устройство для герметичного соединения со вторым замкнутым объемом, при этом устройство для герметичного соединения содержит отверстие на оси X, система транспортировки содержит желоб со стыковочной кромкой на оси X2, шарнирно соединенный вокруг первой оси поворота и второй оси поворота, причем способ включает в себя этап приближения, на котором желоб приближается к устройству соединения для его установки в стыковочное положение, и этап отведения, на котором желоб отходит от устройства соединения для установки желоба в исходное положение, при этом во время каждого из этапов приближения и отведения желоб поворачивают вокруг первой оси поворота и вокруг второй оси поворота.
Кроме того, желоб поворачивают одновременно, соответственно, вокруг первой оси поворота и второй оси поворота.
Кроме того, на этапе приближения и этапе отведения ось стыковочной кромки остается параллельной оси устройства соединения.
Кроме того, в исходном положении заливная кромка желоба ориентирована по направлению внутренней части замкнутого пространства.
Изобретения также относится способу транспортировки предметов между вторым объемом и первым объемом вышеуказанного замкнутого пространства, содержащему этапы, на которых:
соединяют второй замкнутый объем с устройством соединения,
отводят двери замкнутого пространства и второго замкнутого объема,
устанавливают желоб на место,
транспортируют предметы из второго замкнутого объема во внутрь замкнутого пространства,
отводят желоб,
устанавливают дверь обратно на место.
Соединение может быть получено посредством поворота второго замкнутого объема относительно замкнутого пространства для обеспечения соединения между фланцами второго замкнутого объема и устройством соединения, и между дверью второго замкнутого объема и дверью замкнутого пространства.
Способ может включать в себя этап, на котором определяют конфигурацию системы транспортировки, определяют положение дверей и подают сигнал системе транспортировки для приближения или нет желоба устройства соединения.
Особенности изобретения станут более поняты из последующего описания, со ссылкой на приложенные чертежей.
Краткое описание чертежей
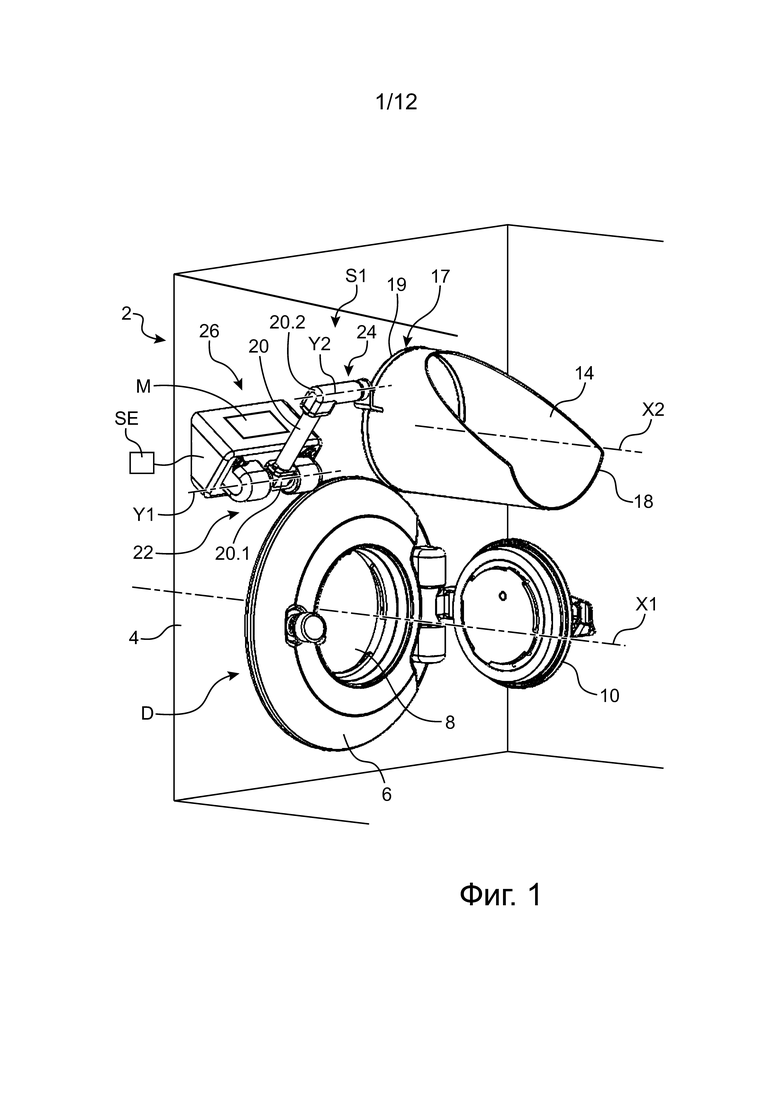
На фиг. 1 показана внутренняя часть замкнутого пространства, снабженного системой транспортировки согласно первому варианту выполнения, причем система транспортировки находится в исходном положении, вид в перспективе;
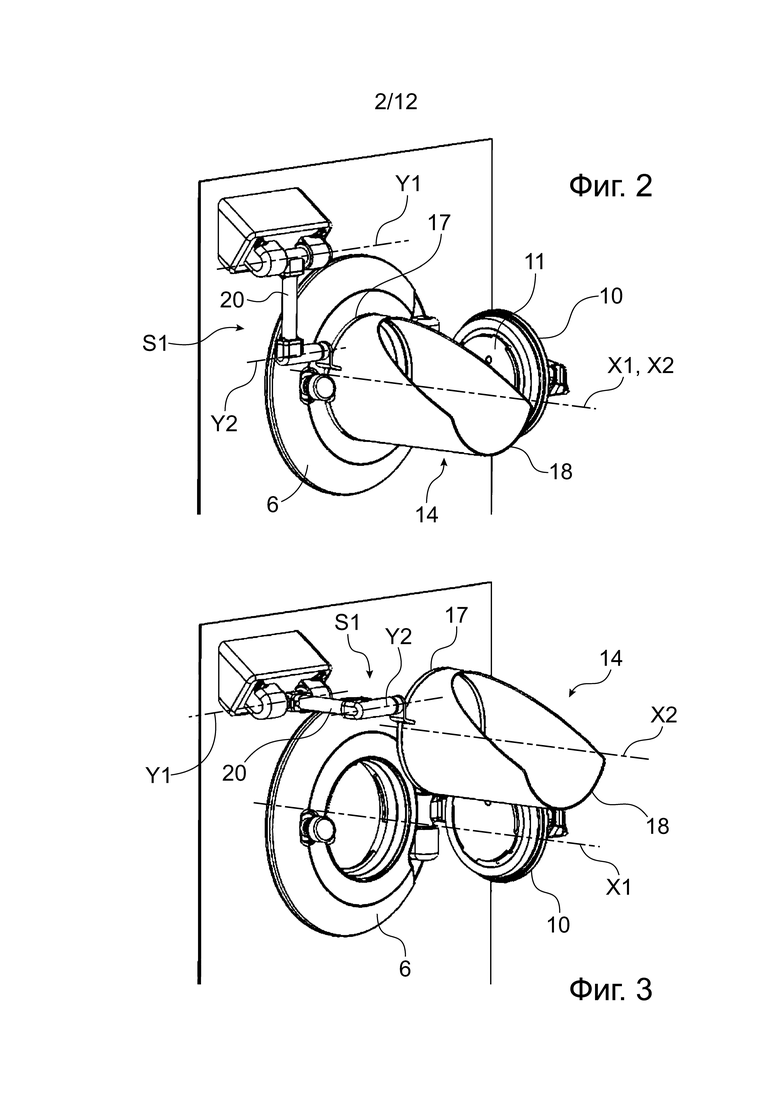
на фиг. 2 – замкнутое пространство по фиг. 1, в котором система транспортировки находится в стыковочном положении, вид в перспективе;
на фиг. 3 – замкнутое пространство по фиг. 1, в котором система транспортировки находится в промежуточном положении, вид в перспективе;
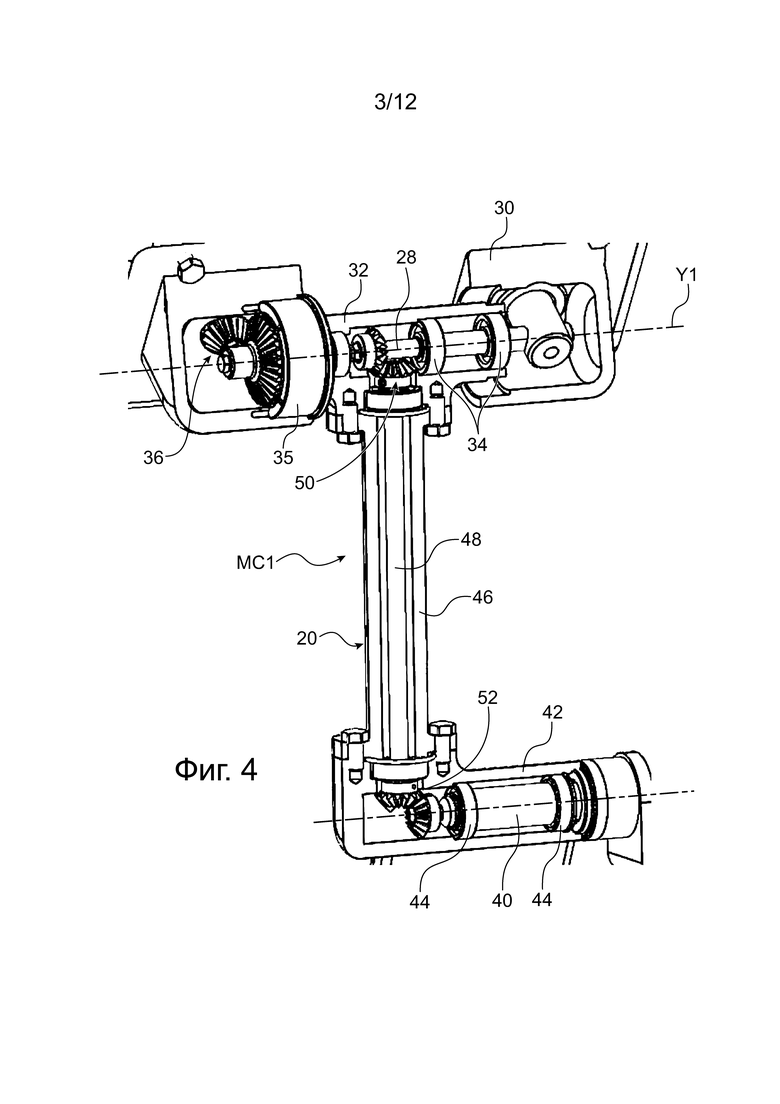
на фиг. 4 – механизм системы транспортировки по фиг. 1, вид с частичным разрезом,
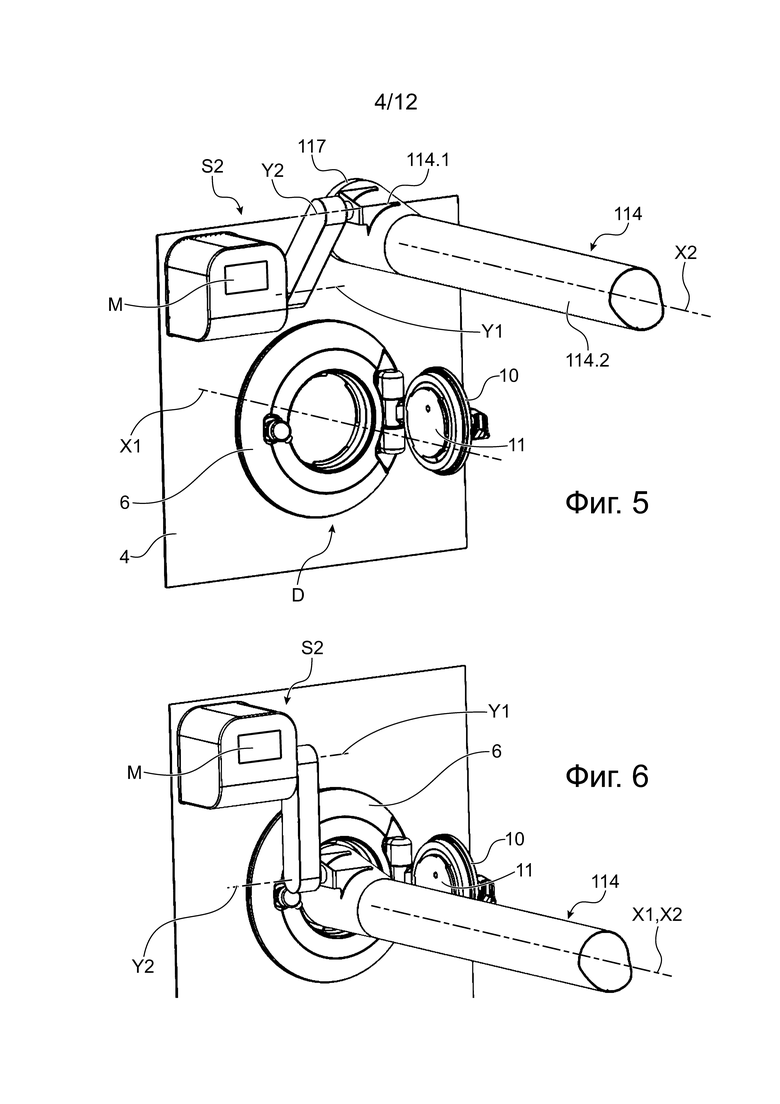
на фиг. 5 – внутренняя часть замкнутого пространства, снабженного системой транспортировки согласно второму варианту выполнения, при этом система транспортировки находится в исходном положении, вид в перспективе;
на фиг. 6 – замкнутое пространство по фиг. 5, в котором система транспортировки находится в стыковочном положении, вид в перспективе;
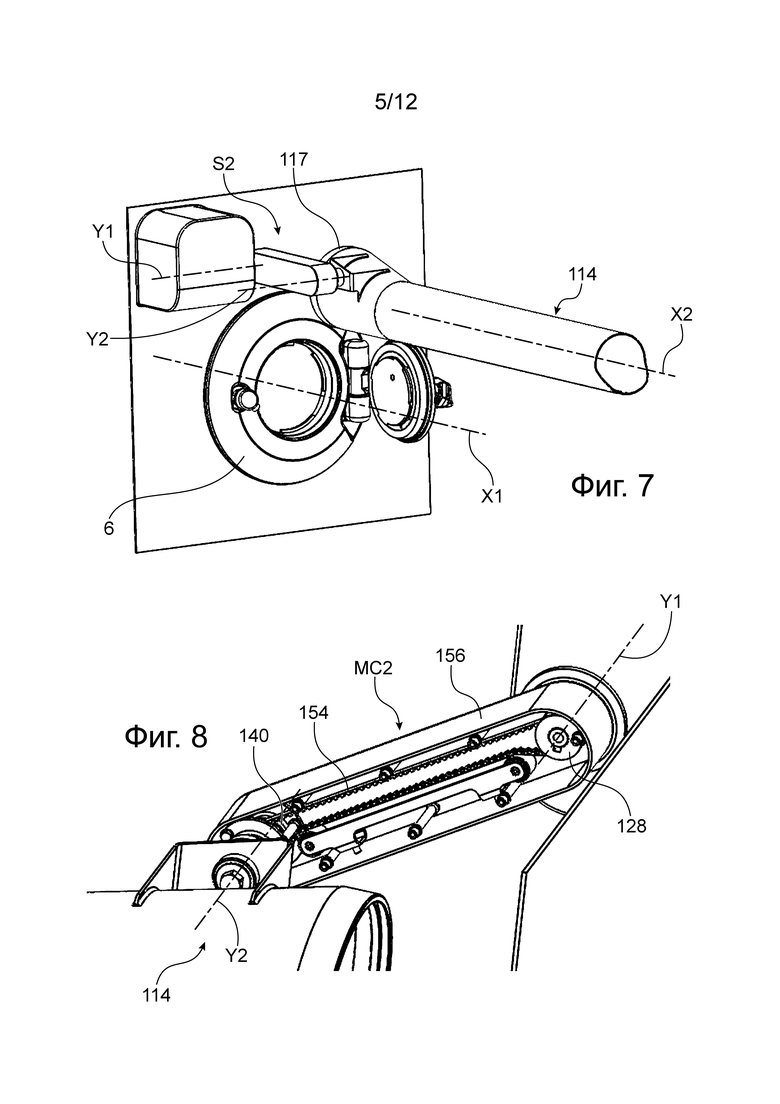
на фиг. 7 – замкнутое пространство по фиг. 5, в котором система транспортировки находится в промежуточном положении, вид в перспективе;
на фиг. 8 – механизм системы транспортировки согласно второму варианту выполнения, вид с частичным разрезом;
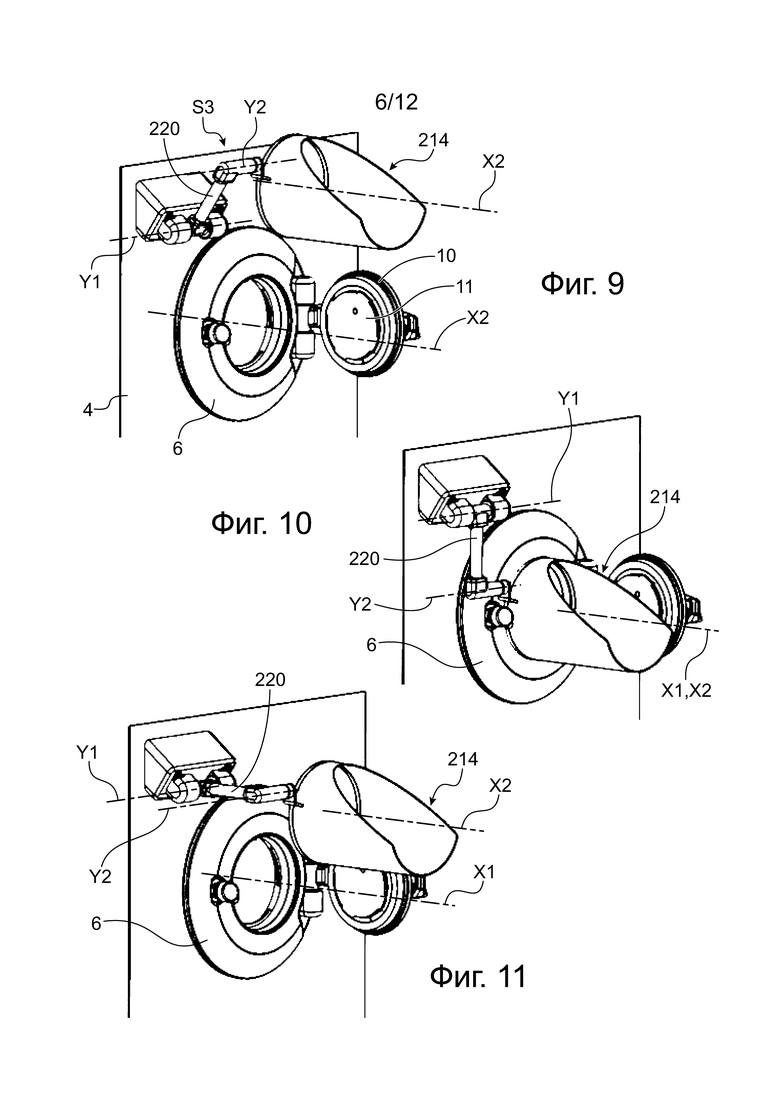
на фиг. 9 – внутренняя часть замкнутого пространства, снабженного системой транспортировки согласно третьему варианту выполнения, при этом система транспортировки находится в исходном положении, вид в перспективе;
на фиг. 10 – замкнутое пространство по фиг. 9, в котором система транспортировки находится в стыковочном положении, вид в перспективе;
на фиг. 11 – замкнутое пространство по фиг. 9, в котором система транспортировки находится в промежуточном положении, вид в перспективе;
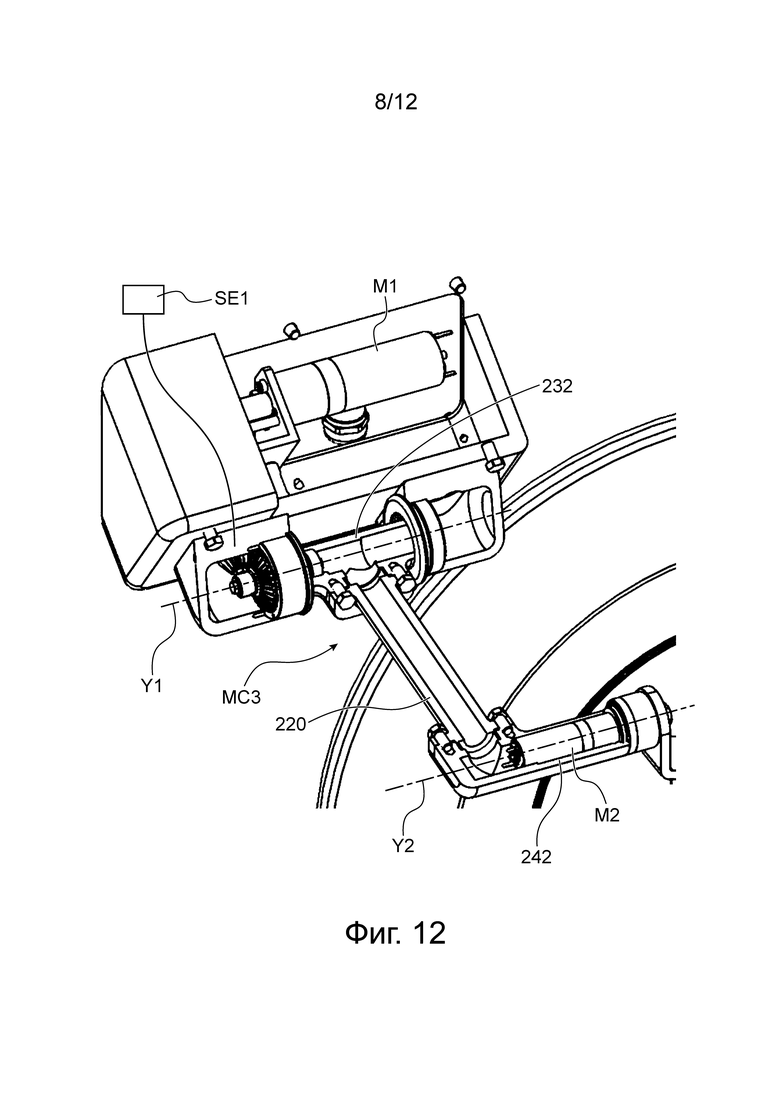
на фиг. 12 – механизм системы транспортировки согласно третьему варианту выполнения, вид с частичным разрезом;
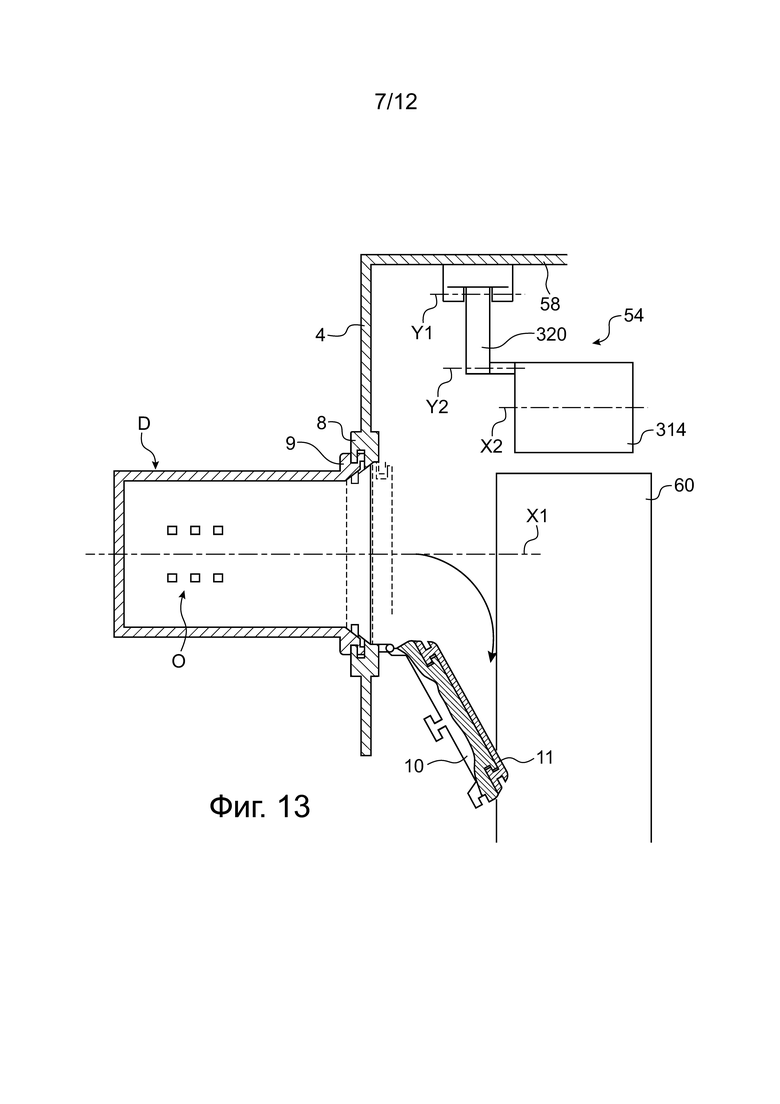
на фиг. 13 – замкнутое пространство, содержащее систему транспортировки согласно другому варианту выполнения, вида сверху в разрезе;
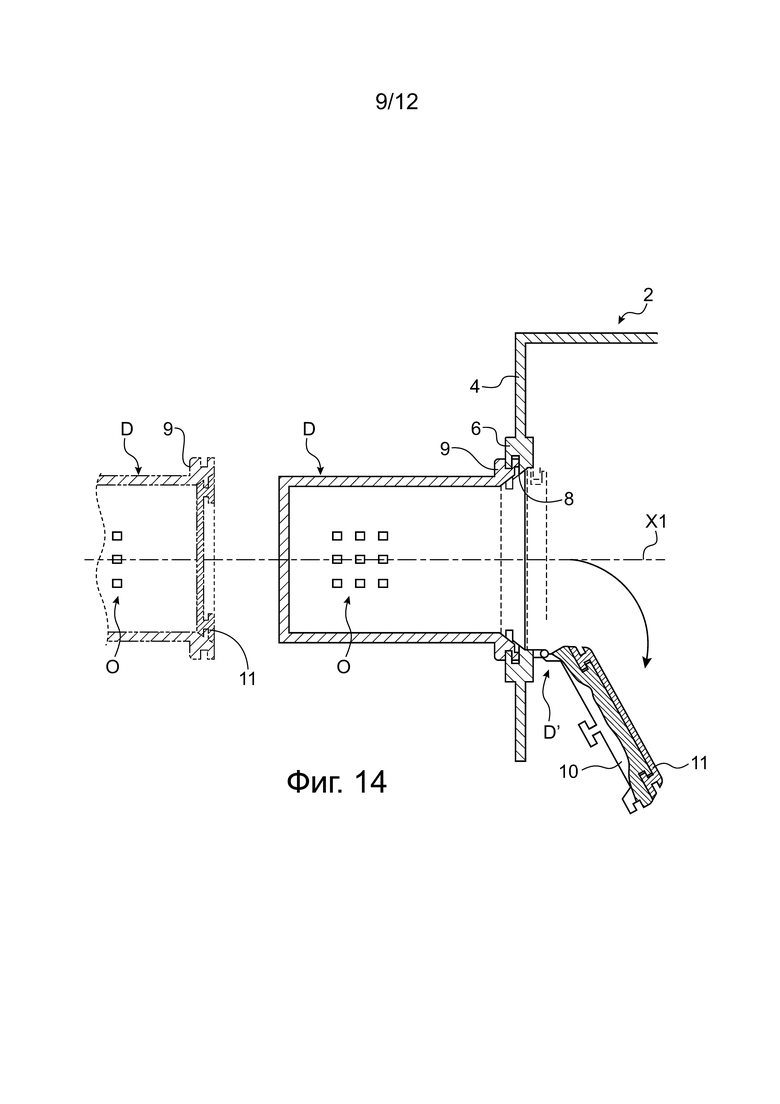
на фиг. 14 – замкнутое пространство, снабженное устройством для герметичного соединения, к которому присоединен контейнер, вида сверху в разрезе;
на фиг. 15А-15С – другие примеров замкнутого пространства.
Осуществление изобретения
На фиг. 1 показан пример герметичного замкнутого пространства, представленного прозрачным, снабженным герметичной системой транспортировки согласно первому варианту выполнения.
Замкнутое пространство 2 содержит стенки, определяющие герметичный объем. По меньшей мере, одна из 4 стенок содержит устройство D для герметичного соединения с внешней герметичной системой, например, с другим замкнутым пространством, жестким контейнером или гибким контейнером типа пакета. Устройство D предназначено для обеспечения возможности герметичного соединения внутренних объемов замкнутого пространства с внешней системой и для обеспечения герметичной передачи между двумя объемами, для защиты предметов, содержащихся в герметичных объемах, и/или для защиты внешней среда от этих предметов. Например, замкнутое пространство 2 может образовывать часть изолирующей системы, в частности, зону локализации изолятора, стерильную зону локализации или зону радиоактивной локализации, которая может использоваться, например, для производства продукции в ядерной, фармацевтической или пищевой промышленности.
В документе FR 2 695 343 и в документе US 9 754 691 описаны примеры устройства для герметичного соединения.
Устройство D для герметичного соединения содержит фланец 6, установленный в стенке 4 и ограничивающий отверстие 8, дверцу 10, предназначенную для герметичного закрытия отверстия 8. Устройство D для герметичного соединения также содержит средство для соединения с внешней системой, например, контейнер С (фиг. 14), также содержащее фланец 9, ограничивающий отверстие, и дверцу 11, герметично закрывающую упомянутое отверстие. Средство соединения, например, может представлять собой байонетное соединение. Каждая дверца также соединена со своим фланцем байонетным соединением. Устройство соединения имеет симметрию вращения по оси X1.
В варианте выполнения устройство соединения также содержит средство для соединения двух фланцев 6 и 9 друг с другом и управляющее кольцо, установленное снаружи замкнутого пространства вокруг фланца 6, причем управляющее кольцо управляет средством для соединения двух дверей 10 и 11 и для отпирания дверцы 11 контейнера С, средство для освобождения другой дверцы и открывания двух дверей 10 и 11, обеспечивающих герметичное соединение между двумя объемами. Средство для соединения двух фланцев 6 и 9 и управляющее кольцо могут вращаться относительно замкнутого пространства и контейнера и, благодаря их вращению, обеспечивают все этапы, необходимые для получения герметичного соединения, и это происходит без поворота одного из замкнутых объемов. В этом примере поворот второго замкнутого объема не требуется.
В другом варианте выполнения соединение двух фланцев, двух дверей и отверстия дверей обеспечивают поворотом контейнера вокруг его оси и относительно замкнутого пространства.
На фиг. 14 описан пример рабочей процедуры обеспечения герметичного соединения замкнутого пространства и контейнера. Пунктирными линиями показан закрытый контейнер перед его соединением с замкнутым пространством. Контейнер содержит предметы О, показанные схематично, которые должны быть перемещены в замкнутое пространство. Система транспортировки не показана.
Фланец 9 контейнера герметично соединен с фланцем 6 замкнутого пространства посредством байонетного соединения. Одновременно дверца 11 контейнера и дверца 10 замкнутого пространства герметично соединены друг с другом посредством байонетного соединения. Наружные поверхности дверей 10, 11 изолированы относительно внутреннего объема контейнера и замкнутого пространства, конструкция, образованная двумя дверцами 10, 11, соединенными друг с другом, может быть отведена путем поворота вокруг своей оси и далее будет смещена в замкнутом пространстве. Затем эти два объема герметично сообщаются, и может осуществляться перемещение предметов между двумя объемами.
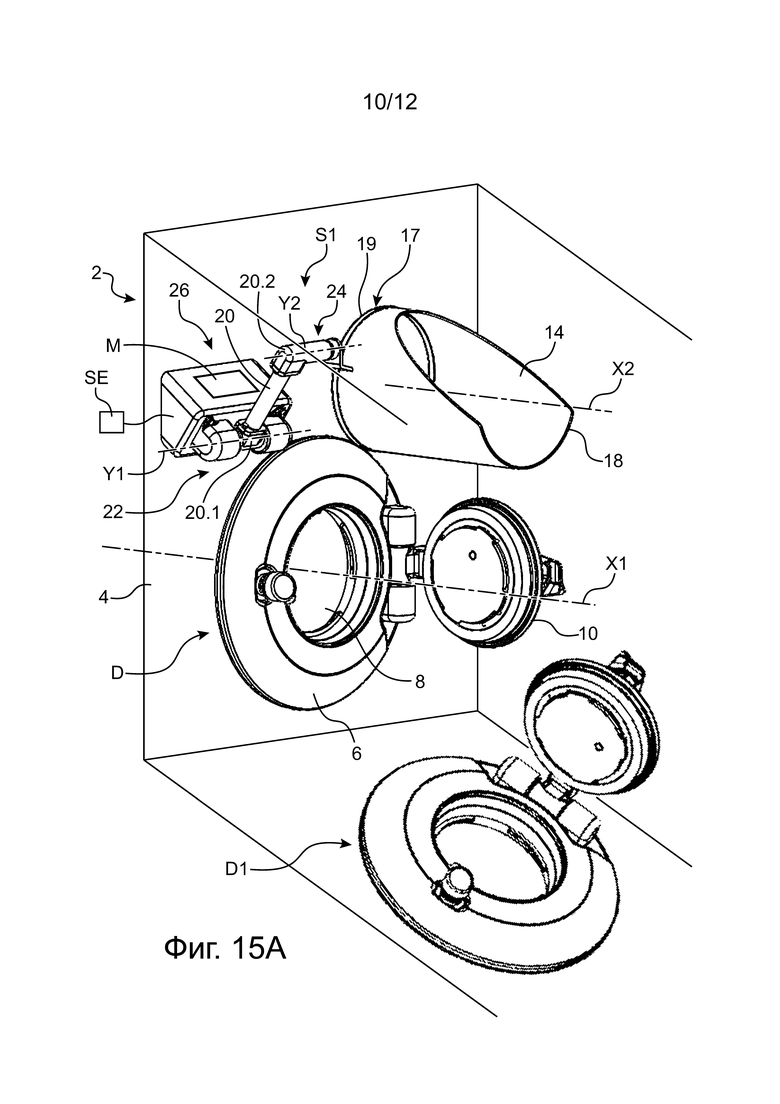
Замкнутое пространство содержит систему S1 транспортировки, позволяющую направлять предметы, поступающие снаружи, во внутреннюю зону объема замкнутого пространства. Например, эти предметы являются ингибиторами, содержащимися в пакете, и которые выливают внутрь замкнутого пространства. Система S1 предназначена для облегчения обработки и/или передачи предметов/элементов в замкнутое пространство 2, например, для облегчения подачи предметов/элементов на конвейерную ленту или, во время последующей обработки, передачи в отдельный герметичный контейнер, через другое устройство для герметичного соединения D1, такое как представлено на фиг.15а.
Система S1 транспортировки содержит часть 14, обеспечивающую направление потока предметов, обозначенную желобом и образующую своего рода воронку.
В представленном примере желоб 14 имеет, по существу, профиль усеченного конуса с круглым сечением с большим основанием, снабженным стыковочной кромкой 17, приспособленной для соприкосновения с фланцем 6 и ограничения отверстия и небольшого основания 18, образуя заливную кромку, ориентированную в направлении зоны, в которой желательно ориентировать предмет (предметы). В представленном примере усеченный конус разрезан плоскостью, наклоненной относительно его оси поворота X2, придающей ему конусообразную форму. Желоб должен занимать стыковочное положение, в котором стыковочная кромка 17 опирается на фланец 16, и отведенное положение, обозначенное исходным положением, в котором желоб 14 отведен от отверстия и находится в режиме ожидания для новой операции передачи. Преимущественно стыковочная кромка 17 покрыта полоской гибкого материала 19, например, из эластомера, чтобы избежать повреждения фланца во время стыковки. В варианте выполнения желоб 14 может иметь поверхность в нисходящем направлении потока предметов, которая наклонена относительно оси стыковочной кромки 17 для облегчения перемещения предметов.
В представленном примере система транспортировки дополнительно содержит рычаг 20, содержащий первый продольный конец 20.1 и второй продольный конец 20.2, первый поворотный шарнир 22 оси Y1, посредством которого рычаг шарнирно прикреплен с возможностью поворота к стенке 4 своим первым продольным концом 20.1, и второй поворотный шарнир 24 оси Y2, посредством которого рычаг шарнирно прикреплен с возможностью поворота к стенке 4 своим вторым продольным концом 20.2. Ось Y2 параллельна оси Y1.
Система транспортировки также содержит привод 26 для поворота рычага вокруг оси Y1 и желоба вокруг оси Y2. В этом примере привод 26 содержит показанный схематично электродвигатель М.
Согласно первому варианту выполнения система транспортировки поддерживает желоб в заданной ориентации относительно устройства D соединения и, таким образом, к несущей его стенке 6. Ориентация желоба в изобретении соответствует оси стыковочной кромки. На фиг. 1 ось части желоба, по которому перемещают предметы, и ось стыковочной кромки объединены. В других вариантах выполнения они являются пересекающимися. Сохранение ориентации желоба относительно устройства соединения означает, что ось стыковочной кромки и ось устройства соединения имеют одинаковую угловую ориентацию относительно друг друга и/или ось стыковочной кромки является ортогональной к оси стенки 4, независимо от положения желоба в замкнутом пространстве, например, ось стыковочной кромки параллельна оси устройства соединения, независимо от положения желоба в замкнутом пространстве. В представленных примерах плоскость, содержащая отверстие устройства для герметичного соединения и стенку, объединена. В других примерах стенка проходит по меньшей мере в двух наклонных плоскостях, часть стенки, содержащая устройство для герметичного соединения, находится в плоскости, отличной от другой части (частей) стенки, при этом, поддерживают ориентацию между осью стыковочной кромки и частью стенки, содержащей устройство для герметичного соединения, или осью стыковочной кромки и другой частью стенки. В других примерах устройство для герметичного соединения устанавливают в наклонной стенке, причем отверстие находится в плоскости, отличной от плоскости всей стенки, после чего удерживают ориентацию между осью стыковочной кромки и осью устройства соединения или между осью стыковочной кромки и осью наклонной стенки. Таким образом, поддерживают ориентацию оси стыковочной кромки относительно элемента замкнутого пространства.
В этом варианте выполнения, представленном на фиг.1-4, и предпочтительно механизм обеспечивает поддержание оси X2 стыковочной кромки 17, параллельной оси X1 устройства соединения и перпендикулярной стенке 4. Таким образом, во время стыковки стыковочная кромка 14 приближается параллельно фланцу, и вся стыковочная кромка входит в контакт с фланцем 6 одновременно или почти одновременно. В исходном положении стыковочная кромка 17 перемещается ближе к стенке 4, и заливочная кромка 18 ориентирована к внутренней части замкнутого пространства.
В первом варианте выполнения сохранение ориентации желоба осуществляется посредством механизма MC1, показанного на фиг.4.
Механизм MC1 содержат первую внутреннюю ось 28 оси Y1, установленную закрепленной на пластине 30, предназначенной для закрепления на стенке 4 замкнутого пространства, первую внешнюю ось 32, концентрическую с первой внутренней осью 28 и окружающую её, установленную с возможностью вращения вокруг первой внутренней оси 28 посредством подшипников 34. Подшипники 35 также предусмотрены между первым внешним валом 32 и корпусом 37, образующим кожух. Первая внешняя ось 32 предназначена для приведения в действие двигателем М. В представленном примере коническая угловая передача 36 колеса передает вращение вала двигателя М на первую внешнюю ось 32. В альтернативном варианте вал двигателя параллелен или выровнен с внешней осью.
Механизм MC1 также содержат вторую внутреннюю ось 40, соединенную с возможностью вращения с желобом 14 и установленную на второй внешней оси 42 и образующую второй поворотный шарнир. Подшипники 44 предусмотрены между второй внутренней осью 40 и второй внешней осью 42. Рычаг 20 содержит внешний вал 46, жестко соединяющий первую внешнюю ось 32 и вторую внешнюю ось 42, и внутренний вал 48, механически соединяющий первую внутреннюю ось 28 и вторую внутреннюю ось 40 и обеспечивает поддержание в положении желоба 14.
Внутренний вал 48 механически соединен с первой внутренней осью 28 угловой передачей 50, и вторым внутренним валом 40 посредством второй угловой передачи 52. В этом примере угловая передача 52 находится на продольном конце второй внутренней оси. 40. В альтернативном варианте угловая передача 52 расположена в промежуточном положении второй внутренней оси 40.
Все механические элементы системы транспортировки покрыты защитным кожухом, чтобы ограничить выброс частиц внутрь замкнутого пространства из-за трения. Кроме того, такой кожух облегчает этапы очистки внутренней части замкнутого пространства. Кожух индивидуален для каждой механической части или корпуса и/или является общим для нескольких механических частей или корпусов.
Далее приведено описание работы данного механизма MC1.
Электродвигатель М приводится в действие, который обеспечивает вращение первого внешнего вала 32 вокруг оси Y1 свободно относительно первой внутренней оси 28, которая вращательно приводит в движение внешний вал 46 и вторую внешнюю ось 42. Благодаря связи, обеспечиваемой внутренним валом 48 и угловыми передачами, поддерживают ориентацию второй внутренней оси 40 в постоянном положении при повороте относительно оси Y1.
Таким образом, желоб 14, который зафиксирован относительно второй внутренней оси 40, имеет фиксированную ориентацию при смещении в ячейке.
Далее приведено описание процесса работы системы транспортировки.
Двери замкнутого пространства и контейнера, соединенные вместе, отдаляют от устройства соединения.
При включении электродвигателя М рычаг 20 поворачивается вокруг оси Y1, в результате чего рычаг 20 приближается к стенке 40. Желоб 14, в частности, стыковочная кромка 17, приближается к фланцу 6, параллельному ему, благодаря механизму MC1 до соприкосновения с фланцем 6 и граничного с отверстием. Желоб находится в положении стыковки (фиг. 3).
Когда требуется отвести желоб, например, чтобы можно было возвратить двери обратно на место, двигатель включается и осуществляют поворот в противоположном направлении. Рычаг 20 поворачивается вокруг оси Y1 в противоположном направлении. На первом этапе рычаг отводят от стенки 4 (фиг. 3). Стыковочная кромка 17 отходит от фланца 6, оставаясь параллельно ему. На втором этапе рычаг 20 приближается к стенке 4 и стыковочная кромка 17 приближается параллельно к стенке 4 и достигает своего исходного положения (фиг.2).
Заливная кромка ориентирована к внутренней части замкнутого пространства, так что место, необходимое для размещения желоба в исходном положении, уменьшено по отношению к желобу в вертикальном положении на фиг.1, в этом случае, необходимо будет предусмотреть размер замкнутого пространства большей высоты.
Активация электродвигателя может быть автоматической после возникновения внешнего события, например, после обнаружения соединения контейнера и отверстия дверей. В другом примере, электродвигатель активируют вручную пользователем посредством внешнего пользовательского управления или интерфейса управления пользователя.
В этом примере исходное положение желоба находится над устройством соединения. В альтернативном варианте исходное положение расположено ниже устройства соединения или сбоку относительно устройства соединения.
В примерном варианте выполнения желоб содержит часть ниже по потоку, сформированную так, чтобы она могла поворачиваться сама по себе для облегчения падения предметов/элементов для перемещения и для обеспечения того, что все предметы/элементы были перемещены, например, на линию транспортировки. Например, операция поворота может быть активирована как с момента активации системы, так и с момента установки по отношению к устройству соединения с целью прекращения передачи или по истечении определенного времени, чтобы вызвать передачу предметов/элементов, потенциально остающиеся в желобе.
В предпочтительном варианте выполнения, система транспортировки содержит средство SE обнаружения для определения положения желоба или, в более общем случае, состояния системы транспортировки. В предпочтительном варианте выполнения информация, передаваемая этим средством обнаружения, подается в блок управления, который сравнивает состояние открытия и закрытия устройства соединения, чтобы предотвратить любое размещение желоба 14, если двери находятся в закрытом положении или любое перемещение обратно дверей на фланцы, если желоб 14 находится в положении стыковки. Средство SE обнаружения содержит, например, индуктивный датчик или кодовое колесо, например, расположенное на уровне первой внешней оси 32. Устройство соединения предшествующего уровня техники, в целом, содержит средство, указывающее его состояние, например, если двери находятся на месте или нет, в заблокированном положении или нет. Средство обнаружения может содержать один или несколько оптических датчиков, обнаруживающих, открыто ли отверстие или закрыто. Датчики могут, например, предоставлять информацию непосредственно в функционально ассоциированный блок управления и/или подключаться к электродвигателю для отмены любой активации двигателя, когда датчик обнаружения обнаруживает, что отверстие заблокировано дверью 10 или другим предметом. В другом варианте выполнения датчик (датчики) используют для автоматической активации электродвигателя М. В другом примерном варианте выполнения датчик (датчики) используются для обнаружения и проверки положения и/или угловой ориентации желоба.
В примерном варианте выполнения предусмотрено средство для ручного приведения в действие системы транспортировки, например, в случае поломки электродвигателя. Например, средство содержат рукоятку, расположенную снаружи замкнутого пространства и проходящую через стенку 4 герметичным образом и механически соединенную с первой внешней осью 32, и средство для отключения двигателя. Внешняя рукоятка соединена с возможностью вращения с первой внешней осью 28 через стенку. Ось Y2 также образует ось вращения рукоятки. При повороте рукоятки, например, пользователем, одновременно поворачивается первая внешняя ось 28. Остальные этапы процесса функционирования системы аналогичны описанному выше процессу с электродвигателем. Переход из исходного положения в стыковочное положение достигается смещением рукоятки в направлении вращения. Поворот в противоположном направлении вызывает переход из состыкованного положения в исходное положение.
В альтернативном варианте выполнения приведение в действие системы транспортировки выполняют исключительно вручную, например, с использованием описанной выше рукоятки.
На фиг. 5-8 показан второй пример согласно первому варианту выполнения системы S2 транспортировки. Такой пример отличается от системы транспортировки согласно первому варианту выполнения формой желоба и средством, обеспечивающим сохранение ориентации желоба.
Система S2 транспортировки содержит желоб 114, включающий в себя первую часть 114.1 в форме усеченного конуса, несущую стыковочную кромку 117, и вторую часть 114.2 трубчатой формы, граничащую с заливной кромкой.
Диаметр стыковочной кромки 117 меньше диаметра фланца, который расположен в отверстии.
Желоб имеет большой осевой размер, чем желоб 14, и позволяет направлять предметы внутрь замкнутого пространства.
Система транспортировки также содержит механизм MC2, обеспечивающий сохранение ориентации желоба.
Механизм MC2 содержит зубчатый ремень 154 между первой внутренней осью 128 и второй внутренней осью 140, причем первая ось 128 и вторая внутренняя ось 140 представляют собой шлицевые оси. Ремень 154 обеспечивает сохранение ориентации второй внутренней оси 140 и, следовательно, сохранение ориентации желоба.
Механизм MC2 заключен в кожух 156, ограничивающий риск выброса частиц во внутренний объем замкнутого пространства. Этот вариант выполнения имеет преимущество, заключающееся в том, что он обеспечивает более бесшумную работу благодаря использованию зубчатого ремня, который обычно выполнен из синтетического материала. Ролики, опирающиеся на ремень, выполнены с возможностью регулировки его натяжения.
В альтернативном варианте выполнения зубчатый ремень заменяют цепью и на ней закреплены шестерни, соосные с внутренней осью.
Этапы работы системы транспортировки аналогичны описанным выше этапам для системы на фиг. 1-4.
Система транспортировки согласно изобретению особенно интересна в случае, когда желоб имеет очень большой размер вдоль своей оси X1. Действительно, это позволяет значительно уменьшить высоту замкнутого пространства по сравнению с замкнутым пространством, оборудованным системой транспортировки предшествующего уровня техники.
На фиг. 9-12 показан третий вариант выполнения системы S3 транспортировки, в котором используют два электродвигателя.
Система S3 транспортировки содержит первый электродвигатель M1, установленный на стенке 4, аналогично электродвигателю M, и механически соединенный с первой внешней осью 232 для привода во вращательное движение вокруг оси Y1. Он содержит наружный вал и вторую внешнюю ось 242, в которой установлен второй электродвигатель М2, на валу которого встроен желоб 214 с возможностью вращения.
Затем на электродвигатель М2 подают команду сохранять ориентацию желоба 214 относительно оси устройства соединения независимо от ориентации рычага 220 относительно стенки 4. Используют, по меньшей мере, один датчик SE1 углового положения для измерения угла положения рычага вокруг оси Y1, так что блок управления корректирует угловую ориентацию желоба 214 относительно второй внешней оси 242. В альтернативном варианте датчик углового положения реализован для измерения углового положения оси X2 стыковочной кромки X2 желоба 214 относительно Y2, и блок управления корректирует эту ориентацию.
Средство для электропитания второго электродвигателя M2 не показано для ясности, но оно содержит, например, электрические провода, соединяющие клеммы второго электродвигателя M2 и источника электрического тока и проходящие в рычаге 20, который имеет пустотелую форму в этом варианте выполнения.
Третий вариант выполнения имеет преимущество, заключающееся в уменьшении количества движущихся механических частей, что снижает риск образования частиц при истирании.
В другом варианте выполнения можно предусмотреть, что первая 232 и вторая 242 внешние оси не всегда параллельны в ходе передачи. Например, во время стыковки и во время передачи оси 232 и 242 параллельны, и во время расстыковки желоб наклоняется вниз, чтобы гарантировать, что все предметы действительно были перемещены, и что ни один из них больше не остается в желобе, прежде чем перемещать систему транспортировки в исходное положение.
В соответствии с дополнительным признаком система транспортировки может содержать средство, которое реализовано для блокировки системы транспортировки, по меньшей мере, в положении стыковки и в исходном положении, чтобы избежать любого неконтролируемого смещения. Средство блокировки содержит, например, электрический тормоз, например, для торможения вращения первой внешней оси 21 в первом варианте выполнения, или механизм, предотвращающий, например, поворот первой внешней оси 32 вокруг оси Y1, например, это может быть втягивающийся штифт, проникающий в первую внешнюю ось 32 перпендикулярно к ней и предотвращающий её вращение, пока двигатель не активируется.
В вариантах осуществления, описанных подробно, ориентация желоба поддерживается так, что стыковочная кромка постоянно смещается в плоскостях, параллельных устройству соединения и ортогональных оси X1 устройства соединения. В альтернативном варианте выполнения желоб может быть смещен в наклонной плоскости. Действительно, в случае второго примерного варианта выполнения стыковочная кромка проникает в отверстие фланца, тогда нет необходимости, чтобы стыковочная кромка была параллельна фланцу.
В другом варианте выполнения, ориентация желоба не поддерживается, и желоб может иметь, по меньшей мере, одну первую ориентацию во время его перемещения от устройства соединения или его приближения к нему и вторую ориентацию во время стыковки, в момент, когда стыковочная кромка может быть расположена параллельно фланцу. В исходном положении ось желоба может быть наклонена относительно верхней стенки, тем не менее, предлагая уменьшенный объем по сравнению с системой транспортировки предшествующего уровня техники.
В представленных вариантах выполнения система транспортировки закреплена на стенке, несущей устройство соединения. На фиг. 13 примерный вариант выполнения, в котором система S4 транспортировки прикреплена к стенке, отличной от стенки, несущей устройство соединения, например, стенке 58, примыкающей к стенке 4. Система находится в стыковочном положении. Благодаря вращательному шарнирному соединению вала 320 и желоба 314 такая конфигурация становится возможной. В этом втором варианте выполнения желоб не поддерживается вдоль заданной ориентации относительно устройства соединения. Третий вариант выполнения, представленный на фиг. 9-12, в котором реализованы два двигателя, особенно подходит для второго варианта выполнения. Действительно, для ориентации желоба, управляемого двигателем, достаточно управлять вторым двигателем M2 соответствующим образом, чтобы изменить ориентацию желоба во время приведения в действие системы транспортировки.
В примере на фиг. 13 представлена линия 60 передачи, по которой желательно транспортировать предметы.
Может быть использовано средство для определения положения/состояния системы транспортировки и состояния устройства соединения во всех примерных вариантах выполнения.
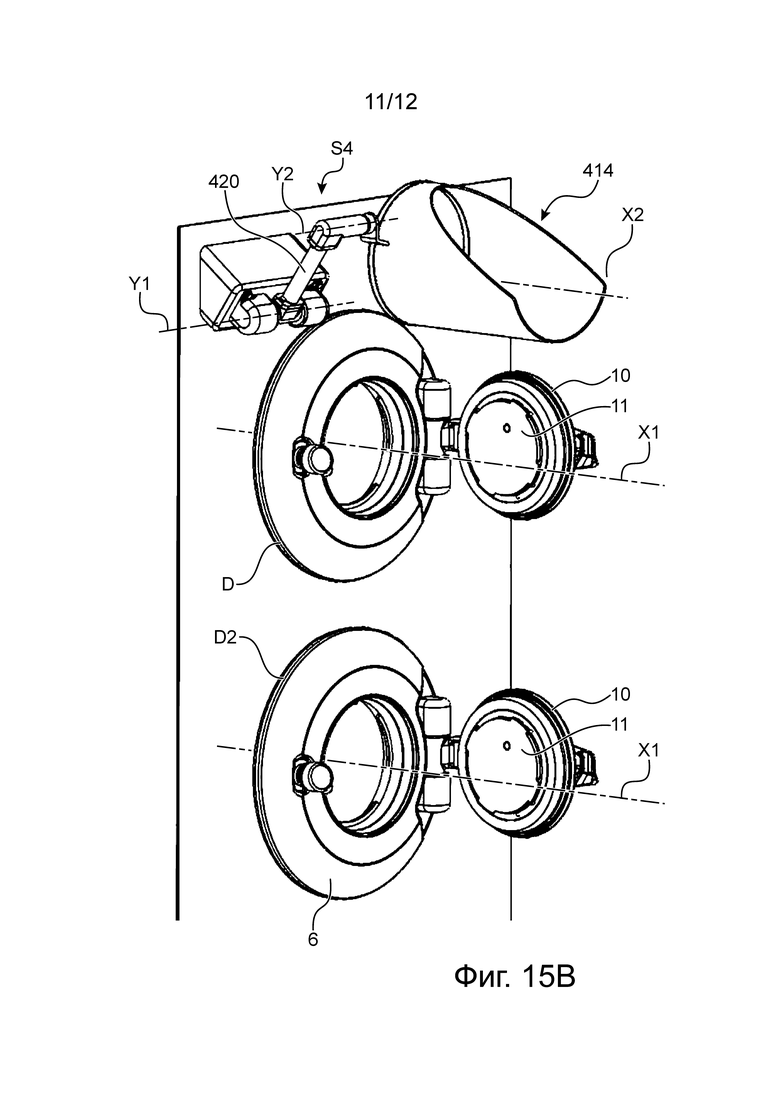
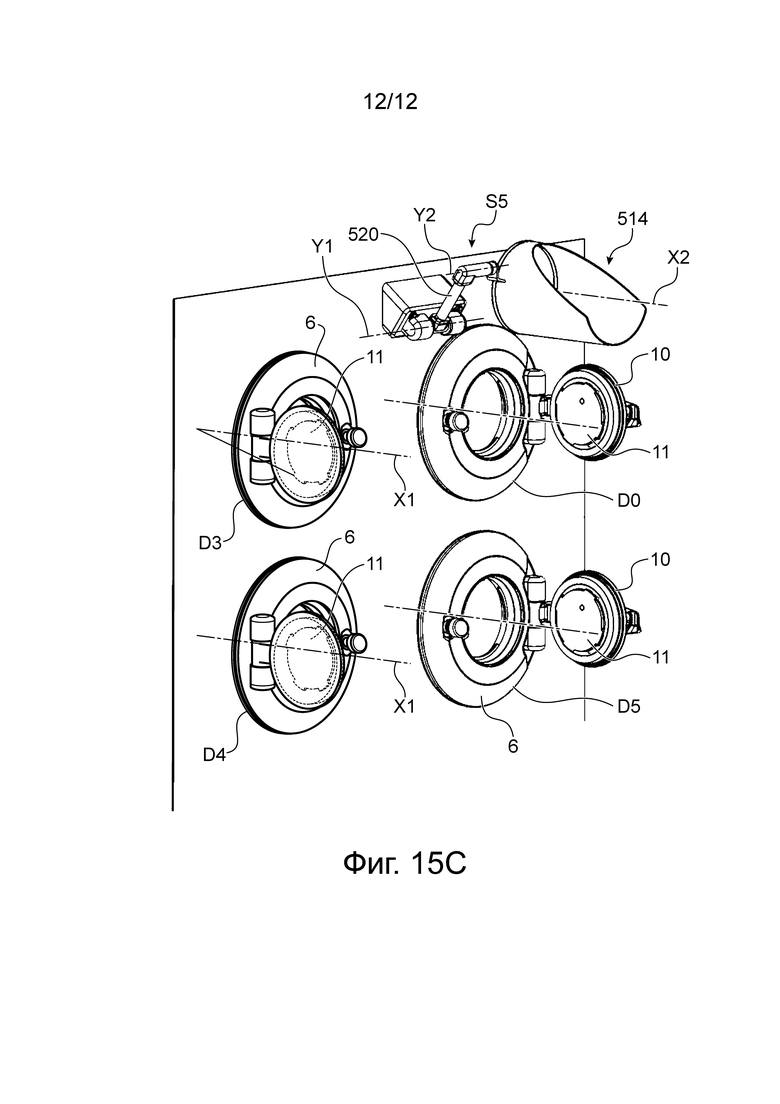
На фиг. 15А-15С показаны примеры герметичных замкнутых пространств, содержащих несколько устройств соединения на одной и той же стенке или на разных стенках. Система транспортировки может использоваться для стыковки нескольких устройств соединения. На фиг. 15A замкнутое пространство содержит второе устройство D1 в стенке, перпендикулярной стенке 2, содержащей устройство D соединения. На фиг. 15B другое устройство D2 находится в той же перегородке 2, затем система S1 транспортировки может использоваться для передачи предметов, поступающих из контейнера, подключенного к устройству D или D1. На фиг. 15C все устройства D и D3-D5 находятся на одной стенке, система транспортировки может использоваться или не использоваться со всеми или частью устройств D3-D5. Замкнутое пространство может содержать несколько устройств соединения, распределенных на одной или нескольких стенках и несколько систем транспортировки.
В представленных примерах желоба имеют, по существу, круглые формы и стыковочная кромка и заливная кромка находятся, по существу, в параллельных плоскостях. В альтернативном варианте стыковочная кромка и заливная кромка находятся в непараллельных плоскостях, причем желоб имеет наклонную ось относительно оси стыковочной кромки, например, для направления предметов к нижней части замкнутого пространства.
В другом варианте выполнения система транспортировки содержит несколько рычагов, шарнирно соединенных друг с другом между первым шарнирным соединением и вторым шарнирным соединением.
Систему транспортировки согласно описанию применяют к замкнутым пространствам, содержащим устройства любого типа для герметичного соединения, а не только к тем, которые реализуют байонетное средство соединения. Устройство (устройства) для герметичного соединения может содержать выдвижные штифты, собачки магнитного типа и т.д.
Описанные в изобретении задачи могут быть реализованы во всех технических областях, требующих перемещения предметов между двумя замкнутыми объемами и изолированными от внешней среды.
Изобретение относится к системе транспортировки для герметичного замкнутого пространства, определяющего замкнутый объем, предназначенный для соединения с другим замкнутым объемом, причем герметичное замкнутое пространство содержит устройство для герметичного соединения между двумя замкнутыми объемами. Система транспортировки содержит: по меньшей мере один рычаг, желоб, второй поворотный шарнир, расположенный между рычагом и желобом и имеющий вторую ось поворота, и средство сохранения ориентации для сохранения ориентации желоба во время его перемещения в замкнутом пространстве. Средство сохранения ориентации содержит механизм между первой внутренней осью, проходящей вдоль первой оси поворота, и второй внутренней осью, проходящей вдоль второй оси поворота. Вторая внутренняя ось соединена с возможностью вращения с желобом, и указанный механизм содержит внутренний вал, соединенный с первой внутренней осью и со второй внутренней осью посредством угловых передач. Изобретение позволяет выполнить систему транспортировки, имеющую большую приспособляемость и предложить большую свободу по конструированию замкнутого пространства. 4 н. и 13 з.п. ф-лы, 17 ил.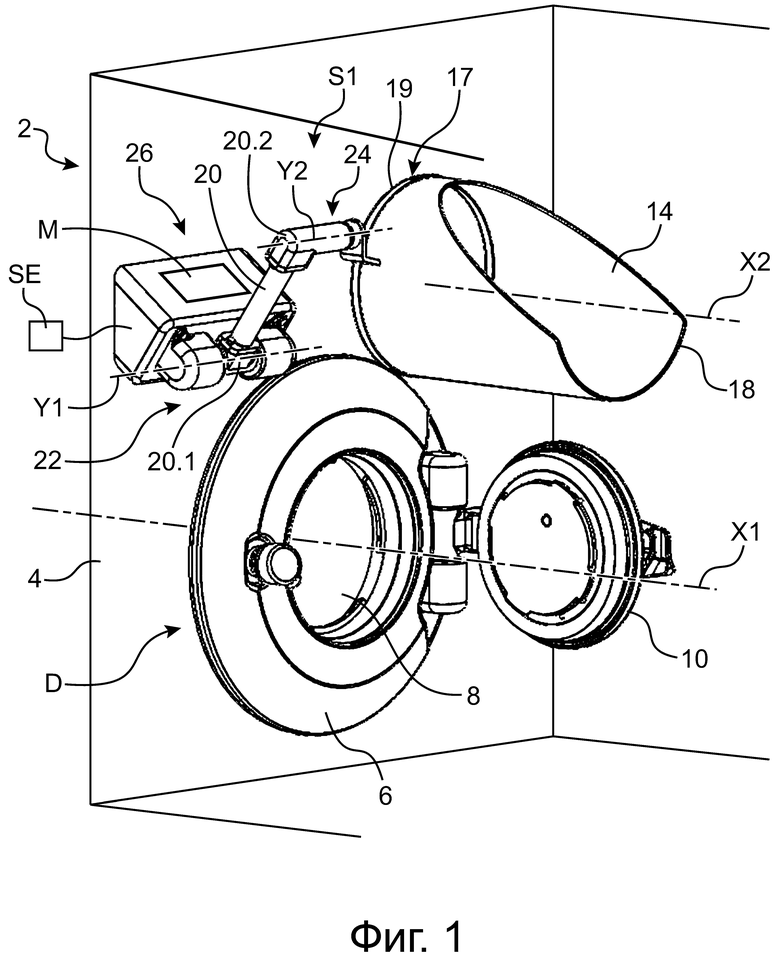
1. Система транспортировки для герметичного замкнутого пространства, определяющего первый замкнутый объем и включающего в себя по меньшей мере одно устройство для герметичного соединения, приспособленного для соединения первого замкнутого объема со вторым замкнутым объемом, при этом система транспортировки предназначена для размещения в указанном замкнутом пространстве и содержит:
по меньшей мере один рычаг, приспособленный для установки с возможностью поворота на стенке герметичного замкнутого пространства посредством первого поворотного шарнира (22) с первой осью (Y1) поворота;
желоб (14, 114, 214), включающий в себя стыковочную кромку (17, 117, 217), выполненную с возможностью взаимодействия с устройством для герметичного соединения, и заливную кромку (18); и
второй поворотный шарнир (24), расположенный между рычагом и желобом (14, 114, 214) и имеющий вторую ось (Y2) поворота, и
средство сохранения ориентации для сохранения ориентации желоба (14, 114, 214) во время его перемещения в замкнутом пространстве, при этом средство сохранения ориентации содержит механизм между первой внутренней осью (28), проходящей вдоль первой оси (Y1) поворота, и второй внутренней осью (40), проходящей вдоль второй оси (Y2) поворота, при этом вторая внутренняя ось (40) соединена с возможностью вращения с желобом (14), и указанный механизм содержит внутренний вал (48), соединенный с первой внутренней осью (28) и со второй внутренней осью (40) посредством угловых передач (50, 52).
2. Система по п. 1, в которой первая ось (Y1) поворота и вторая ось (Y2) поворота параллельны.
3. Система по п. 1, в которой стыковочная кромка имеет продольную ось (X2), при этом средство сохранения ориентации выполнено так, что продольная ось (X2) стыковочной кромки выровнена с осью отверстия устройства соединения и/или перпендикулярна стенке замкнутого пространства, в котором установлено устройство для герметичного соединения.
4. Система по п. 1, в которой механизм содержит зубчатый ремень или цепь (154), зацепленные с первой внутренней осью (138) и второй внутренней осью (140), при этом первая внутренняя ось (138) и вторая внутренняя ось (140) выполнены шлицевыми.
5. Система по любому из пп. 1 или 2, содержащая привод, включающий в себя по меньшей мере один электродвигатель (М) для поворота системы вокруг первой оси поворота (Y2).
6. Система по любому из пп. 1 или 2, содержащая первый электродвигатель (М1) для перемещения рычага вокруг первой оси (Y1) поворота и второй электродвигатель (М2) для перемещения желоба (214) вокруг второй оси (Y2) поворота.
7. Система по любому из пп. 1 или 2, содержащая средство (S) для обнаружения конфигурации системы транспортировки и/или открытого состояния устройства соединения.
8. Замкнутое пространство, определяющее первый замкнутый объем и содержащее устройство (D) для герметичного соединения со вторым замкнутым объемом, при этом устройство (D) соединения установлено на стенке (4) этого замкнутого пространства и содержит систему транспортировки по любому из пп. 1-7.
9. Замкнутое пространство по п. 8, в котором первый поворотный шарнир системы транспортировки закреплен на стенке, в которой установлено устройство соединения.
10. Замкнутое пространство по любому из пп. 8 или 9, в котором устройство соединения содержит средство байонетного соединения.
11. Способ приведения в действие системы транспортировки, установленной на стенке замкнутого пространства, определяющего первый замкнутый объем и содержащего устройство для герметичного соединения со вторым замкнутым объемом, при этом устройство для герметичного соединения содержит отверстие, система транспортировки содержит желоб со стыковочной кромкой и шарнирным соединением вокруг первой оси (Y1) поворота и второй оси (Y2) поворота, средство сохранения ориентации для сохранения ориентации желоба (14, 114, 214) во время его перемещения в замкнутом пространстве, при этом средство сохранения ориентации содержит механизм между первой внутренней осью (28), проходящей вдоль первой оси (Y1) поворота, и второй внутренней осью (40), проходящей вдоль второй оси (Y2) поворота, при этом вторая внутренняя ось (40) соединена с возможностью вращения с желобом (14), и указанный механизм содержит внутренний вал (48), соединенный с первой внутренней осью (28) и со второй внутренней осью (40) посредством угловых передач (50, 52), причем способ включает в себя этап приближения, на котором желоб приближается к устройству соединения для его установки в стыковочное положение, и этап отведения, на котором желоб отходит от устройства соединения для установки желоба в исходное положение, при этом во время каждого из этапов приближения и отведения желоб поворачивают вокруг первой оси (Y1) поворота и вокруг второй оси (Y2) поворота.
12. Способ по п. 11, в котором желоб поворачивают одновременно, соответственно, вокруг первой оси (Y1) поворота и второй оси (Y2) поворота.
13. Способ по п. 12, в котором на этапе приближения и этапе отведения ось (X2) стыковочной кромки остается параллельной оси (X1) устройства соединения.
14. Способ по любому из пп. 11, 12 или 13, в котором в исходном положении заливная кромка желоба ориентирована по направлению к внутренней части замкнутого пространства.
15. Способ транспортировки предметов между вторым объемом и первым объемом замкнутого пространства по любому из пп. 8, 9 или 10, включающий в себя этапы, на которых:
соединяют второй замкнутый объем с устройством соединения,
отводят двери замкнутого пространства и второго замкнутого объема,
устанавливают желоб на место,
транспортируют предметы из второго замкнутого объема внутрь замкнутого пространства,
отводят желоб,
устанавливают дверь обратно на место.
16. Способ по п. 15, в котором соединение получают посредством поворота второго замкнутого объема относительно замкнутого пространства для обеспечения соединения между фланцами второго замкнутого объема и устройством соединения, и между дверью второго замкнутого объема и дверью замкнутого пространства.
17. Способ по любому из пп. 15 или 16, включающий в себя этап, на котором определяют конфигурацию системы транспортировки, определяют положение дверей и подают сигнал системе транспортировки для приближения или нет желоба устройства соединения.
| US 2013167442 A1, 04.07.2013 | |||
| US 9168520 B2, 27.10.2015 | |||
| УСТРОЙСТВО ГЕРМЕТИЧНОГО СОЕДИНЕНИЯ С ПОВЫШЕННОЙ БЕЗОПАСНОСТЬЮ РАБОТЫ | 2014 |
|
RU2664779C2 |
| ВЫСОКОЗАЩИЩЕННЫЙ МЕХАНИЗМ УПРАВЛЕНИЯ УСТРОЙСТВА ДЛЯ ГЕРМЕТИЧНОГО СОЕДИНЕНИЯ ДВУХ ЗАМКНУТЫХ ПРОСТРАНСТВ | 2012 |
|
RU2604454C2 |
| МЕХАНИЗМ С УПРОЩЕННЫМ ОБРАЩЕНИЕМ ДЛЯ РЕГУЛИРОВАНИЯ УСТРОЙСТВА, ПРЕДНАЗНАЧЕННОГО ДЛЯ ГЕРМЕТИЧНОГО СОЕДИНЕНИЯ ДВУХ ЗАМКНУТЫХ ПРОСТРАНСТВ | 2012 |
|
RU2613075C2 |

