Область техники, к которой относится изобретение
Изобретение направлено на способ для обработки порций мяса птицы, в частности куриных грудок, и системы для обработки упомянутых порций мяса птицы.
Уровень техники
Для порций мяса птицы, таких как куриные грудки, является обычным, что они обрабатываются с помощью разрезания и обрезки, чтобы лучше выполнять конкретные требования по заказу. Разрезание и обрезка обычно выполняются таким образом, чтобы нарезанные порции мяса птицы отвечали требованиям, в частности по весу. Например, конкретные требования в технике существующего уровня состоят в том, что нарезанные порции мяса птицы имеют вес, соответствующий единой порции пищи. Обработка также может включать в себя обрезку порции мяса птицы для удаления посторонних объектов, таких как жир и кусочки костей. В других специфических случаях порции могут быть нарезаны под размер, подходящий для выполнения части заказа на партию порций мяса птицы, например, партии куриных грудок весом 750 грамм.
Для обработки порций мяса птицы было разработано множество автоматизированных систем, чтобы уменьшить трудовые затраты, увеличить точность, с которой эти порции могут быть порезаны, уменьшить отходы продукта вследствие наличия обрезков, минимизировать потери продукта вследствие продуктов с превышенными размерами, и увеличить скорость обработки. Как правило, наиболее эффективный способ обрезки порции мяса птицы вплоть до желаемого веса, будет включать в себя выполнение такой обрезки, которая является специфичной к этой порции мяса птицы, при этом общий способ, отвечающий этим специфичным планам нарезки, должен обеспечивать сложные манипуляторы роботов для нарезки вдоль любой желаемой линии разреза. Пример известной системы для обрезки порций мяса птицы может быть найден в документе WO 2015/198062 A1. В этой системе сложный манипулятор роботов для нарезки с использованием водяной струи используется для обрезки порций мяса птицы, а также для удаления посторонних объектов. Однако такие манипуляторы роботов являются чрезвычайно дорогими, и поэтому создаётся препятствие для более широкого применения этих более эффективных способов обработки порций мяса птицы. Поэтому задача настоящего изобретения состоит в том, чтобы обеспечить улучшенный способ для обработки порции мяса птицы, который не включает в себя дорогие и сложные манипуляторы роботов для нарезки, в то же время поддерживая преимущества, связанные с планами по нарезке для отдельных порций мяса птицы.
Раскрытие изобретения
В соответствии с первым аспектом настоящего изобретения, обеспечивается способ обработки порции мяса птицы, включающий в себя: определение в блоке управления целевого веса порции мяса птицы; контроль порции мяса птицы с использованием блока приёмочного контроля для определения распределения по массе упомянутой порции мяса птицы и обеспечение упомянутого распределения по массе с помощью блока управления; вычисление плана по нарезке порции мяса птицы на основе целевого веса и распределения по массе с использованием блока управления; использование механического захвата, чтобы захватывать порцию мяса птицы и размещать упомянутую порцию мяса птицы для выполнения плана по нарезке; и нарезание порции мяса птицы с использованием блока по нарезке, в соответствии с планом по нарезке, чтобы производить порцию мяса птицы, в соответствии с целевым весом. Было определено, что обработка порций мяса птицы может быть выполнена с большей экономической эффективностью при использовании механического захвата, чтобы захватывать порцию мяса птицы и размещать порцию мяса птицы по отношению к блоку по нарезке для выполнения плана по нарезке. Использование такого механического захвата, чтобы размещать порцию мяса птицы перед нарезкой позволяет выполнение более сложных планов по нарезке с помощью относительно простого блока по нарезке.
В то время как настоящий способ направлен на обработку порций мяса птицы, также подразумевается, что этот способ может применяться для других типов порций пищевых продуктов, таких как порции рыбы и порции мяса.
Целевой вес может быть единственным значением, например, 160 грамм, или может быть диапазоном, например, 150 - 160 грамм. В некоторых простых сценариях целевой вес для каждой нарезанной порции мяса птицы может быть единственным значением, которое является фиксированным для каждой порции мяса птицы. Однако в большинстве случаев определенное количество факторов вносят свой вклад в определение целевого веса, эти факторы будут описываться ниже. Однако следует отметить, что определение целевого веса может быть выполнено на любом этапе перед вычислением плана по нарезке порции мяса птицы и фактически в некоторых вариантах осуществления изобретения контрольные данные, например, распределения по массе, может быть одним из факторов, используемых для определения целевого веса. Аналогичным образом, механический захват может иметь уже принятую порцию мяса птицы перед определением целевого веса.
Следует также отметить, что на этом этапе механический захват и блок нарезки будут обычно управляться с помощью блока управления для выполнения упомянутых выше задач.
Обычным типом заказа для порций мяса птицы является партия порций мяса птицы, с каждой партией, имеющей свой целевой вес. Например, общими для торговых партий филе из куриных грудок являются упаковки, имеющие установленный вес. Чтобы эффективно согласовать требования по весу партии, предпочтительно, способ включает в себя формирование партии порций мяса птицы, при этом целевой вес определяется на основе веса целевой партии и веса представленной неполной партии. Целевой вес партии обычно является весом, связанным с конкретным заказом. Например, заказ может быть на 1000 партий филе куриной грудки, каждая партия имеет вес по 750 граммов, и в этом случае целевой вес партии может составлять 750 граммов. Опять же, любые допуски по весу партии могут быть согласованы с целевым весом партии, который представляет собой диапазон весов, например, от 740 до 760 грамм. Вес представленной неполной партии может быть весом партии, которая в настоящее время готовится. Это может быть 0 граммов, если для партии еще не выделены порции, или может быть некоторое ненулевое значение меньше целевого веса партии. Например, если конкретная партия имеет представленный неполный вес 590 граммов и целевой вес партии составляет 750 граммов, целевой вес может быть определен как 160 граммов для завершения партии. В этой ситуации способ включает в себя вычисление целевого веса, как веса, требуемого для завершения партии, перед приёмочным контролем порции мяса птицы и вычислением плана нарезки, требуемого для достижения упомянутого целевого веса.
Для некоторых заказов может потребоваться конкретное количество порций мяса птицы в партии порций мяса птицы. Например, заказ может составлять 1000 партий, каждая из которых содержит четыре порции куриной грудки с общим весом партии 750 граммов. Следовательно, предпочтительно, чтобы целевой вес определялся на основании целевого количества порций мяса птицы в упомянутой партии и количества порций мяса птицы в упомянутой представленной неполной партии. Здесь следует отметить, что целевое количество порций мяса птицы снова может быть диапазоном, например, от трех до пяти порций мяса птицы. Посредством включения целевого количества порций мяса птицы в определение целевого веса можно предотвратить производство неполных партий порций мяса птицы, которые не могут быть завершены с помощью поступающих порций мяса птицы.
Предпочтительно, целевой вес определяется на основе веса упомянутой порции мяса птицы и/или на основе веса одной или нескольких порций мяса птицы, расположенных выше по ходу процесса от упомянутой порции мяса птицы. Включение веса поступающих порций мяса птицы в определение целевого веса может предотвратить, например, использование очень больших порций мяса птицы для производства небольших порций нарезанного мяса птицы, что привело бы к получению большого количества обрезков мяса птицы с более низкой стоимостью. Включение веса порций мяса птицы выше по ходу процесса в определение также позволяет системе быть чувствительной к изменениям веса поступающих порций мяса птицы и более эффективно использовать поступающее мясо птицы. Например, способ может учитывать, что расположенные выше по ходу процесса порции мяса птицы являются относительно маленькими, и, таким образом, увеличивать целевой вес для рассматриваемой порции мяса птицы, в результате чего поступающие более маленькие порции мяса птицы могут быть помещены в конкретную партию.
Приведенная выше часть описания сосредоточена на определении единого целевого веса для одной порции мяса птицы. Однако следует принимать во внимание, что этот способ будет повторяться для каждой впоследствии принятой порции мяса птицы. Например, способ может включать в себя определение целевого веса для последующей нарезанной порции мяса птицы, при этом упомянутый новый целевой вес определяется на основе, по меньшей мере, целевого веса партии и обновленного веса представленной неполной партии, и, по необязательному выбору, на основе целевого количества порции мяса птицы в упомянутой партии и обновленного количества порций мяса птицы в упомянутой представленной неполной партии и, кроме того, по необязательному выбору, на основе веса последующей порции мяса птицы и/или веса одной или нескольких порций мяса птицы, расположенных выше по ходу процесса от упомянутой последующей порции мяса птицы. Например, обновленный вес представленной неполной партии может быть определен посредством добавления предыдущего целевого веса к предыдущему весу представленной неполной партии. В качестве альтернативы, неполная партия может быть взвешена для обновления веса представленной неполной партии. В еще одном альтернативном варианте каждая нарезанная порция мяса птицы может быть взвешена после нарезки и перед включением в партию для подтверждения точного веса порции мяса птицы и поддержания текущего общего веса для партии.
В некоторых вариантах осуществления изобретения определение целевого веса основано на одном из параметров из числа целевого минимального веса обрезков, целевого максимального веса обрезков и целевого веса обрезков. Обрезки - это часть порции мяса птицы, обычно меньшая часть разделенной порции мяса птицы, которая используется для вторичных продуктов, таких как наггетсы или продукты, подвергшиеся технологической обработке. Обрезки, как правило, имеют меньшую стоимость, чем отрезанная часть мяса птицы, которая в противном случае формировалась бы как часть плана нарезки. Поэтому обычно желательно гарантировать, что обрезки не превышают целевой максимальный вес. С другой стороны, в некоторых случаях обрезки материала ниже определенного веса будут иметь более ограниченное использование, что приведет к дальнейшему снижению его стоимости или потребует полного отказа от обрезков. Поэтому некоторые варианты осуществления включают в себя целевой минимальный вес обрезков для получения обрезков, которые можно использовать для получения предпочтительного продукта из обрезков, хотя это можно игнорировать в тех случаях, когда обрезки использовать нельзя, например, когда в обрезке есть костный фрагмент. В некоторых конкретных случаях может быть желательно получить обрезки с заданным весом, и это может быть учтено при определении целевого веса. Например, обрезки можно использовать в качестве куриных кусков, которые имеют более высокую стоимость, если их можно продавать вместе партиями, причем каждый кусок имеет одинаковый вес. Принимая во внимание стоимость обрезка при определении целевого веса, общая стоимость, извлеченная из порции мяса птицы, может быть максимизирована, повышая экономическую эффективность.
В то время как блок управления может просто отдавать приоритет различным типам заказов, например, отдавать предпочтение заказам на отрезанные порции мяса птицы по сравнению с заказами на куски курицы, изготовленными из обрезков, в некоторых вариантах осуществления блок управления также обеспечивается данными о стоимости, которые могут включать в себя стоимость, связанную с нарезанными порциями птицы и обрезками разного размера. Тогда определение целевого веса также может быть основано на данных о стоимости. Например, заказ партии на нарезанные порции мяса птицы может иметь стоимость 4 фунта стерлингов за килограмм мяса птицы, в то время как заказ на части куриного мяса с использованием обрезков может иметь стоимость 2 фунта стерлингов за килограмм, а заказы продуктов, подвергшихся технологической обработке, с использованием обрезков имеют стоимость 1 фунт стерлингов на килограмм мяса птицы. При определении целевого веса эти значения стоимости могут быть приняты во внимание, чтобы извлечь наибольшее значение стоимости из поступающей порции мяса птицы.
Существует несколько способов, с помощью которых порция мяса птицы может быть подвергнута контролю. В некоторых вариантах осуществления изобретения блок контроля содержит блок взвешивания, а контроль порции мяса птицы включает в себя взвешивание упомянутой порции мяса птицы с помощью блока взвешивания. В очень простом варианте осуществления вес, определяемый блоком взвешивания, может использоваться во взаимосвязи с типичной моделью порции куриной грудки для оценки распределения массы порции мяса птицы. Однако в большинстве случаев груз будет использоваться во взаимосвязи со средством формирования изображения, что будет обсуждаться ниже.
Способ может использовать блок контроля, содержащий блок формирования изображения, а инспектирование порции мяса птицы включает в себя формирование изображения упомянутой порции мяса птицы с помощью блока формирования изображения, чтобы определить распределение объема упомянутой порции мяса птицы. В некоторых упрощенных случаях объемное распределение может использоваться во взаимосвязи со средней массовой плотностью типа обрабатываемой порции мяса птицы для установления массового распределения. Однако предпочтительно, такой вариант осуществления изобретения будет комбинироваться с блоком взвешивания, как подробно описано выше.
В частности, комбинация блока взвешивания и блока формирования изображения, как описано выше, позволит установить более точное распределение массы и, следовательно, повысить точность плана по нарезке.
В еще одном предпочтительном варианте осуществления изобретения блок приёмочного контроля содержит блок сканирования, такой как ультразвуковой блок или блок рентгеновского излучения, и контроль порции мяса птицы включает в себя сканирование упомянутой порции мяса птицы с помощью блока сканирования. То есть предпочтительно, чтобы был обеспечен сканирующий блок, способный непосредственно измерять распределение массы порции мяса птицы. Например, как упоминалось выше, блок рентгеновского излучения можно использовать для создания карты массы, представляющей порцию мяса птицы. Такие блоки сканирования обычно дополнительно повышают точность распределения массы и, следовательно, позволяют рассчитывать более точные планы по нарезке. Например, такие сканирующие блоки обычно обеспечивают вариации массовой плотности по всей порции мяса птицы, которые затем могут быть учтены в плане нарезки.
Как будет ясно из вышеизложенного, блок приёмочного контроля может содержать некоторое количество отдельных блоков, которые собирают соответствующие наборы данных контроля, и, фактически, блоки взвешивания, формирования изображения и сканирования, упомянутые выше, могут использоваться вместе друг с другом. Блок приёмочного контроля может также содержать другие устройства для сбора других типов данных приёмочного контроля, например, камеру для контроля на наличие пятен крови.
В частности, для таких порций мяса птицы, как куриная грудка, обычно предпочтительно, чтобы план нарезки был адаптирован к анатомии конкретного типа порции мяса птицы. Например, в случае куриной грудки предпочтительно, чтобы обрезки делались на более толстом конце куриной грудки и вблизи внутренней лицевой поверхности куриной грудки, в результате чего сохраняется внешний вид. Следовательно, предпочтительно, чтобы приёмочный контроль порции мяса птицы включал в себя идентификацию заранее заданной анатомической области упомянутой порции мяса птицы, а вычисление плана нарезки основывалось на распределении массы и заранее заданной анатомической области. Например, вычисление плана нарезки может включать в себя идентификацию линии разреза в заранее заданной анатомической области, которая создает разрезанную порцию мяса птицы, соответствующую целевому весу. В этом случае, используя пример филе куриной грудки, заранее заданная анатомическая область может быть областью на более толстом конце филе куриной грудки и вблизи внутренней лицевой поверхности филе куриной грудки. Здесь следует принимать во внимание, что линия разреза означает двумерную область, определяемую посредством порции мяса птицы, которая делит порцию мяса птицы на две части. Эта область может быть плоской или может иметь более сложную форму.
Другое средство, гарантирующее, что план нарезки сохраняет внешний вид, в частности, куриной грудки, включает в себя контроль порции мяса птицы с целью идентификации главной оси порции мяса птицы, при этом вычисление плана нарезки включает в себя вычисление линии разреза относительно главной оси. Например, план нарезки может требовать линию разреза с заранее заданным диапазоном углов относительно главной оси. В частности, вычисление линии разреза относительно главной оси включает в себя вычисление линии разреза, определяющей, как правило, острый угол относительно главной оси.
В альтернативном варианте осуществления изобретения вычисление линии разреза относительно главной оси включает в себя вычисление линии разреза, обычно определяющей плоскость, параллельную главной оси. Это может быть использовано для обрезки, например, постоянной толщины внутренней поверхности куриной грудки. Это представляет собой один из способов снижения веса порции мяса птицы при одновременном достижении продукта из обрезков с высокой стоимостью. Например, такая компоновка для нарезки может поддерживать внешний вид куриной грудки и получать обрезки, которые можно использовать, например, для продукта из обрезков, такого как шницель.
В некоторых предпочтительных вариантах осуществления изобретения способ дополнительно включает в себя приёмочный контроль порции мяса птицы, чтобы идентифицировать присутствие и местоположение постороннего объекта, такого как фрагмент кости, внутри порции мяса птицы, и вычисление плана нарезки, дополнительно основанного на расположении постороннего объекта. То есть может потребоваться, чтобы план нарезки включал в обрезку посторонний объект, чтобы гарантировать, что отрезанная порция мяса птицы не содержит посторонних объектов. Кроме того, определение целевого веса может быть основано на присутствии постороннего объекта. Например, блок управления может стремиться минимизировать размер обрезков, чтобы обрезки с посторонними предметами можно было отбраковать как отходы, в то же время минимизируя стоимость потерь. Если, напротив, был получен значительный по размеру обрезок, может потребоваться либо дальнейшая обработка по обрезке, чтобы удалить посторонний объект и использовать полезную часть обрезка, либо отвергнуть более крупную обрезку и потерять повышенную стоимость пригодных для использования обрезков мяса птицы, оба из которых менее рентабельны.
Обычно использование механического захвата для размещения упомянутой порции мяса птицы для выполнения плана нарезки включает в себя перемещение порции мяса птицы относительно режущего блока. Например, механический захват может транспортировать порцию мяса птицы к режущему блоку и помещать порцию мяса птицы в требуемое положение, или ориентировать порцию мяса птицы, как требуется для того, чтобы режущий блок мог выполнять план нарезки.
В некоторых вариантах осуществления изобретения способ дополнительно включает в себя транспортировку порции мяса птицы к механическому захвату с использованием транспортировочного блока и предпочтительно дополнительно включает в себя поднятие порции мяса птицы с упомянутого транспортировочного блока с помощью механического захвата. Поднятие порции мяса птицы, в частности во время нарезки, может предотвратить повреждение режущего блока транспортировочным блоком. В качестве альтернативы, размещение упомянутой порции мяса птицы для выполнения плана нарезки может включать в себя перемещение, или переориентацию, порции мяса птицы на упомянутом транспортировочном блоке, и упомянутый транспортировочный блок впоследствии используется для транспортировки порции мяса птицы к режущему блоку. В этих вариантах осуществления механический захват может размещать порцию мяса птицы таким образом, что, когда она достигает режущего блока, она оказывается в местоположении, позволяющем выполнить план нарезки.
Предпочтительно, способ включает в себя разрезание порции мяса птицы, в то время как упомянутая порция мяса птицы захватывается механическим захватом. Это увеличивает точность, с которой может быть выполнен план нарезки, поскольку механический захват препятствует перемещению порции мяса птицы во время нарезки.
Во многих вариантах осуществления изобретения, чтобы минимизировать затраты, связанные с режущим блоком, режущий блок выполнен с возможностью резания в заранее заданном направлении резки, а размещение порции мяса птицы включает в себя размещение упомянутой порции мяса птицы относительно заранее заданного направления резки таким образом, чтобы режущий блок был способен нарезать порцию мяса птицы в соответствии с планом нарезки.
Предпочтительно, механический захват также используется как часть процесса сортировки и транспортировки нарезанных порций мяса птицы. Например, предпочтительно, способ включает в себя захватывание порции мяса птицы в местоположении для подборки с использованием механического захвата и раздачу нарезанной порции мяса птицы в местоположении для разгрузки, отдельно от местоположения для подборки, использующегося для механического захвата. В частности, когда способ включает в себя формирование партии порций мяса птицы, предпочтительно местоположением для разгрузки является упаковка для партии порций мяса птицы. То есть механический захват может служить для выполнения дополнительной функции по размещению нарезанных порций мяса птицы в партии в соответствующих упаковках. Это может дополнительно снизить стоимость системы для реализации способа, поскольку не требуются отдельные манипуляторы роботов для сортировки и упаковки партий порций мяса птицы. Например, механический захват может захватывать порцию мяса птицы и удерживать эту порцию мяса птицы во время выполнения плана нарезки. Таким образом, обрезки могут быть отделены от нарезанной порции мяса птицы, которая удерживается в механическом захвате. Затем механический захват может переносить нарезанную порцию мяса птицы непосредственно в упаковку для партии порций мяса птицы.
В некоторых вариантах осуществления изобретения механический захват содержит блок взвешивания, при этом способ дополнительно включает в себя взвешивание отрезанной порции мяса птицы с помощью механического захвата после выполнения плана нарезки. Этот вариант осуществления позволяет механическому захвату подтверждать, что план нарезки был выполнен с приемлемой степенью точности. Этот вариант осуществления особенно предпочтителен в комбинации с вышеупомянутым формированием партий с использованием механического захвата, поскольку он позволяет блоку управления с высокой точностью определять вес партии в ходе выполнения процесса.
Способ может быть реализован наиболее экономически эффективным способом, когда режущий блок является недорогим режущим блоком, и поэтому предпочтительно режущий блок содержит режущее лезвие, и, кроме того, предпочтительно, чтобы лезвие было выполнено с возможностью резки в одной режущей плоскости. Кроме того, здесь механический захват используется во взаимосвязи с относительно простым режущим блоком, а механический захват отвечает за перемещение и ориентацию порции мяса птицы и позволяет режущему блоку выполнять план нарезки.
Хотя вышеупомянутый аспект изобретения разработан для использования механического захвата с размещением порции мяса птицы таким образом, что не требуется сложное режущее устройство, также следует принимать во внимание, что различные предпочтительные признаки, обсуждаемые выше, вносят свои собственные преимущества, в результате чего может быть предпочтительным реализовать способ по альтернативному сценарию без механического захвата. Например, сравнительный способ может включать в себя вычисление плана по нарезке и выполнение плана по нарезке без вмешательства механического захвата. Тем не менее, после выполнения плана нарезки можно использовать механический захват, например, для размещения нарезанной порции мяса птицы партиями, как описано выше.
Система была описана выше в отношении сценариев, в которых целевой вес определяется по отношению к одному заказу, то есть в котором система занимается с одним заказом на разрезанную порцию птицы за один раз. Однако обычно в системе имеется множество заказов, которые она стремится выполнять одновременно. Это может быть множество заказов одного и того же типа, или множество разных заказов, или сочетание двух заказов. Например, может быть заказ на партии из двух филе куриных грудок весом 300 граммов, и могут быть две партии в стадии обработки, одна с незавершенным весом 160 граммов и одна с незавершенным весом 155 граммов. Альтернативно или дополнительно, система может иметь два типа заказа, например, заказ на партии из двух филе куриной грудки весом 300 грамм и заказ на филе одной грудки весом 150 грамм. В сценариях, подобных таким случаям, желательно гарантировать, чтобы порция мяса птицы была выделена для заказа, который позволяет извлечь наибольшую стоимость. Поэтому, предпочтительно, способ включает в себя определение множества целевых значений веса, причём каждый целевой вес связан с соответствующим заказом, который должен быть выполнен, и дополнительно включает в себя выбор одного из множества целевых значений веса, который лучше всего соответствует контролируемой порции мяса птицы, при этом вычисляемый план нарезки основывается на выбранном целевом весе и распределении массы проконтролированной порции мяса птицы. В этом случае система эффективно моделирует распределение и обработку порций мяса птицы в соответствии с каждым из заказов, определяя соответствующие целевые веса. Система может оценивать общую стоимость, которая будет получена при обработке порции мяса птицы, в соответствии с каждым заказом, и может выбрать заказ с наибольшей стоимостью в качестве заказа, который будет выполняться. В качестве альтернативы, система может просто выбрать заказ, как заказ с наименьшей потерей продукта, т.е. ожидаемый вес разделанной порции мяса птицы, который меньше всего превышает вес, требуемый соответствующим заказом.
Другие факторы могут повлиять на то, какое из целевых значений веса выбрано для рассматриваемой порции мяса птицы. Предпочтительно, выбор одного из множества целевых значений веса, которое лучше всего соответствует контролируемой порции мяса птицы, основан на одном или нескольких из следующих параметров: оцениваемый вес обрезков, наличие и/или местоположение посторонних объектов, вес одной или нескольких порций мяса птицы, расположенных выше по ходу процесса от упомянутой порции мяса птицы, прогнозируемый обновленный вес партии для одного или нескольких заказов, которые должны быть выполнены (т. е. по сравнению с целевым весом партии), и прогнозируемое обновленное количество порций мяса птицы в партии для одного или нескольких заказов, которые должны быть выполнены (т.е. по сравнению с целевым количеством порций в готовой партии). Другие факторы, которые могут повлиять на решение, включают в себя общее количество заказов каждого типа, которые должны быть выполнены, и время, прошедшее после того, как последняя порция мяса птицы была отнесена к каждому типу заказов. Например, если у нас есть 1000 заказов на партии из двух филе куриной грудки весом 300 граммов и 100 заказов на филе одной грудки весом 150 граммов, система может склоняться к выбору партии из двух филе куриных грудок, поскольку таких заказов нужно больше выполнить. В качестве альтернативы, если, например, последние пять порций мяса птицы были распределены по заказам на филе одинарной грудки весом 150 граммов, то система может склоняться к тому, чтобы начать взвешивание партий филе из двух куриных грудок для устранения этого смещения.
В соответствии со вторым аспектом настоящего изобретения, обеспечивается система, содержащая: блок управления, приспособленный для определения целевого веса нарезанной порции мяса птицы и для вычисления плана нарезки порции мяса птицы на основе целевого веса и распределения массы упомянутой порции мяса птицы; блок приёмочного контроля, приспособленный для контроля порции мяса птицы, чтобы определять распределение массы упомянутой порции мяса птицы и обеспечивать упомянутое распределение массы в блоке управления; механический захват, приспособленный для захватывания порции мяса птицы и размещения упомянутой порции мяса птицы для выполнения плана нарезки; и режущий блок, приспособленный для разрезания порции мяса птицы в соответствии с планом нарезки для того, чтобы произвести разрезанную порцию мяса птицы, в соответствии с целевым весом нарезанной порции мяса птицы.
Следует принимать во внимание, что все описанные выше предпочтительные признаки первого аспекта изобретения в равной степени применимы к этому второму аспекту изобретения.
В соответствии с третьим аспектом настоящего изобретения, обеспечивается машиночитаемый носитель, содержащий исполняемые компьютером инструкции, которые при их реализации вызывают выполнение компьютером следующих этапов: определение целевого веса нарезанной порции мяса птицы; вычисление плана нарезки порции мяса птицы на основании целевого веса и принятого распределения массы порции мяса птицы; инструктирование механического захвата захватить порции мяса птицы и расположить упомянутую порцию мяса птицы для выполнения плана нарезки; инструктирование режущего блока разрезать порцию мяса птицы в соответствии с планом нарезки, чтобы произвести нарезанную порцию мяса птицы в соответствии с целевым значением веса. Кроме того, этот аспект изобретения соответствует инструкциям, которые должны выполняться блоком управления для реализации способа по первому аспекту изобретения. Любые предпочтительные признаки, обсуждавшиеся выше, в равной степени применимы к этому аспекту изобретения.
Краткое описание изобретения
Далее изобретение будет описано со ссылкой на прилагаемые чертежи, на которых:
На фиг.1 схематично показана система для обработки мяса птицы, согласно варианту осуществления настоящего изобретения.
На фиг. 2А и 2В показан механический захват, подходящий для использования в системе, показанной на фиг. 1;
На фиг. 3A-3C показан режущий блок, подходящий для использования в системе по фиг. 1;
На фиг. 4 показана блок-схема последовательности процесса, иллюстрирующая способ, реализованный системой, показанной на фиг. 1.
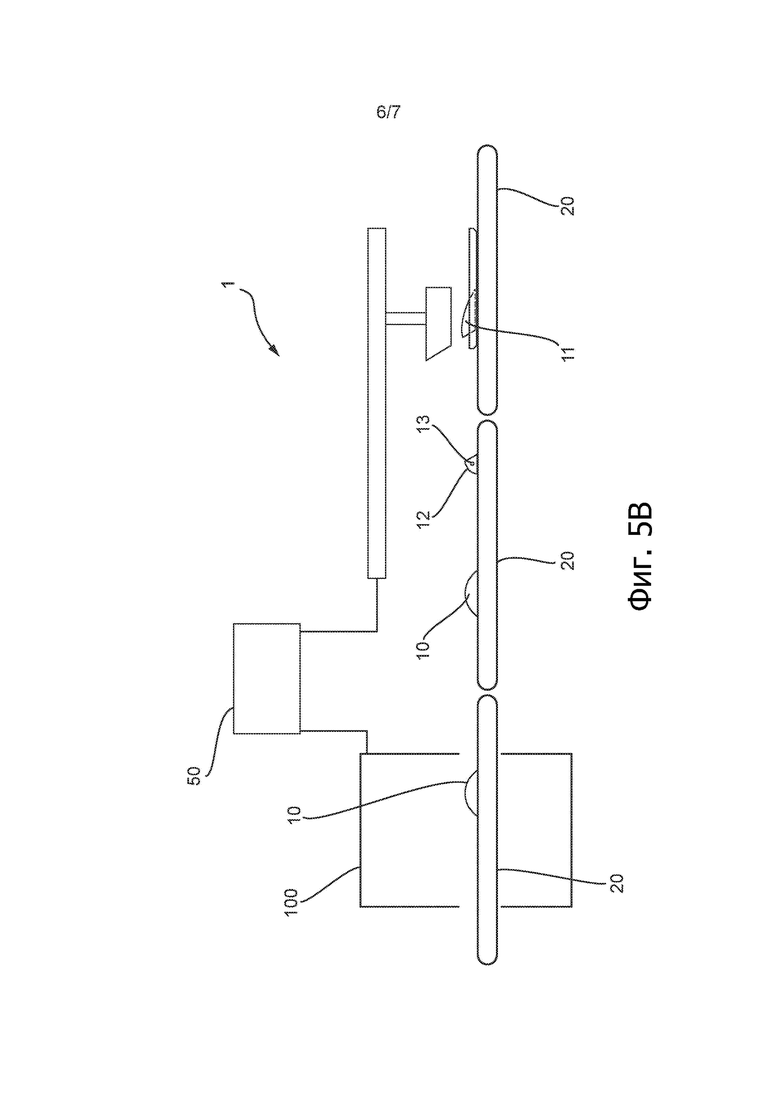
На фиг. 5A и 5B схематически показана система для обработки мяса птицы согласно варианту осуществления настоящего изобретения на двух различных стадиях во время обработки; а также
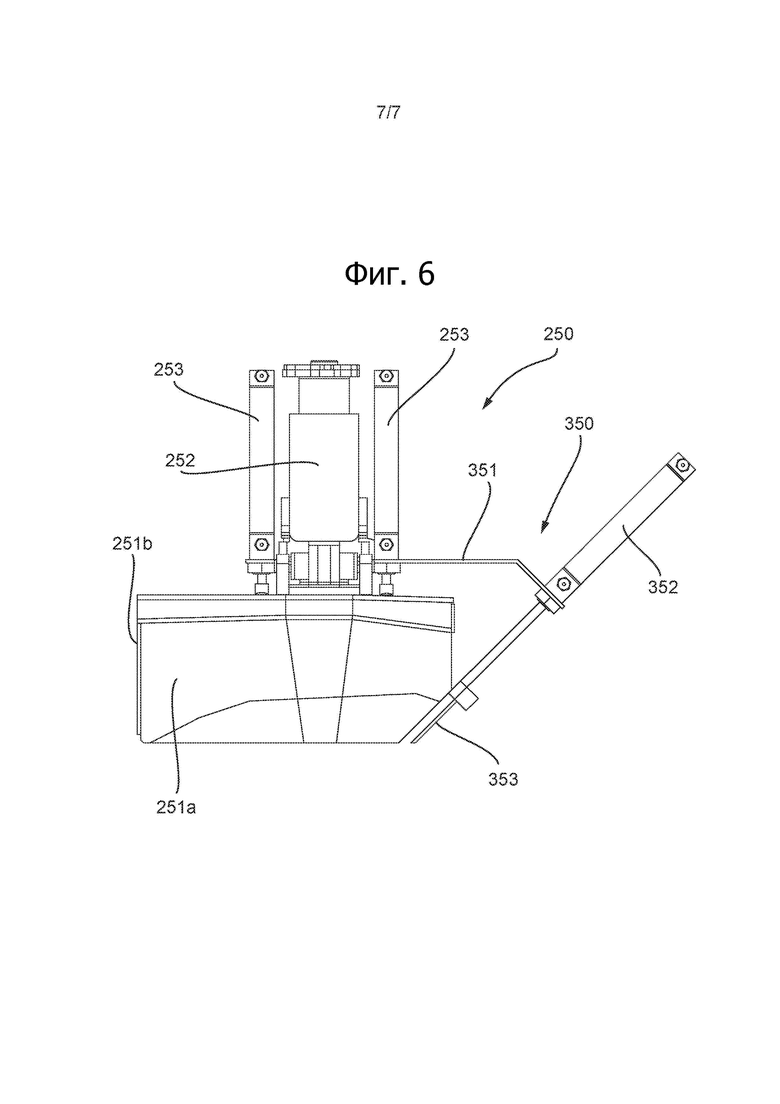
На фиг. 6 показан режущий блок, подходящий для использования в системе, показанной на фиг. 5A и 5B.
Осуществление изобретения
Сейчас будет описан первый вариант осуществления изобретения со ссылкой на фиг. 1 - 4.
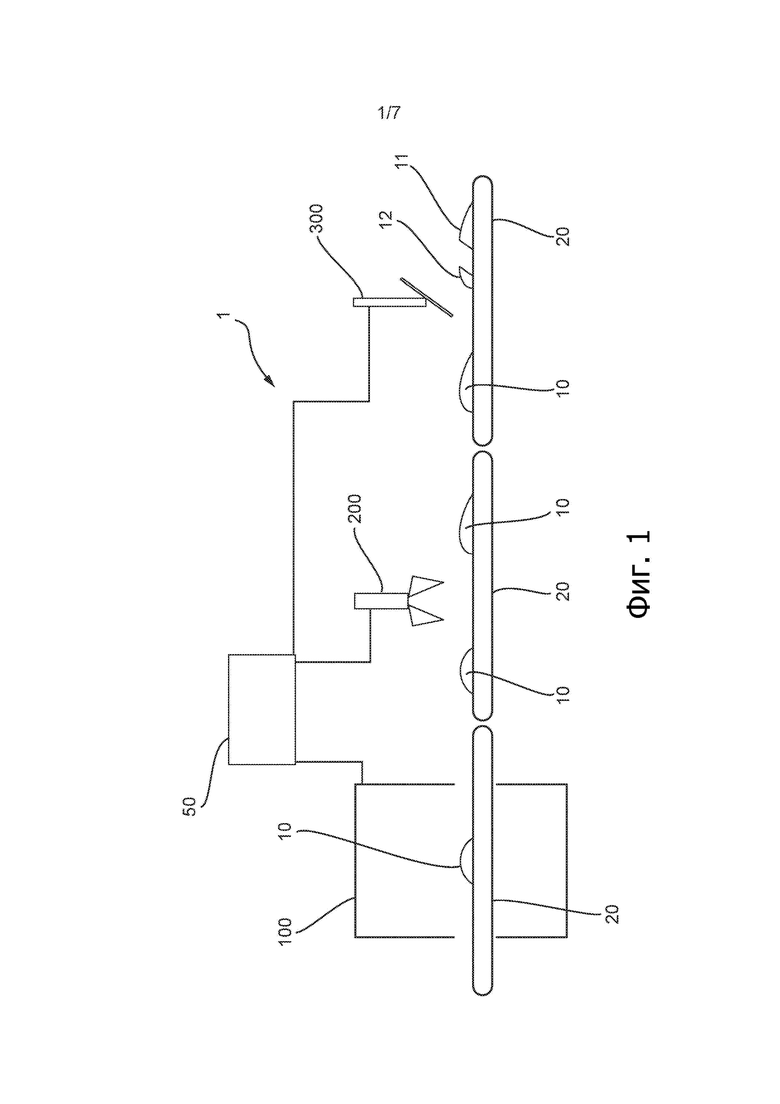
На фиг. 1 схематично показана система для реализации способа, согласно изобретению. Система 1 содержит последовательность конвейеров 20, которые транспортируют неразрезанные порции 10 мяса птицы, в данном случае филе куриной грудки, прошедшие блок 100 приёмочного контроля, механический захват 200 и режущий блок 300 системы обработки мяса птицы, которые будут более подробно описаны ниже.
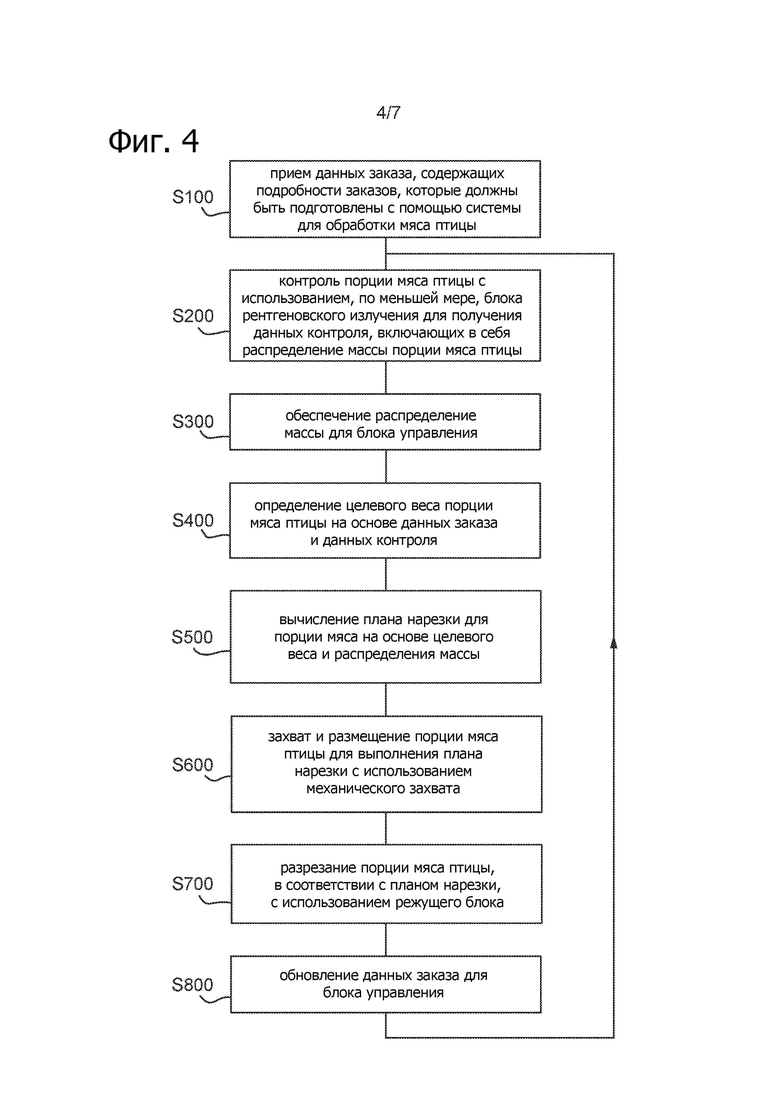
Конвейеры соединены (не показано) с системой 50 управления, которая управляет всеми элементами системы. Как показано на фиг. 4, первым этапом выполнения способа является ввод данных заказа в блок 50 управления на этапе S100. В простейшем сценарии данные заказа могут просто содержать фиксированный целевой вес для нарезанной порции мяса птицы; однако, более часто данные заказа включают в себя некоторое количество элементов. Например, данные заказа могут включать в себя заказы на разные типы конечных продуктов, например, отдельные филе куриной грудки, партии из заданного количества филе куриной грудки с заданным весом и заказы на обрезки. Данные для заказа, связанные с одиночным филе грудки, могут включать в себя целевой диапазон веса, например, минимальный и/или максимальный вес разделанной порции мяса птицы, а также целевой, минимальный и/или максимальный вес обрезков. Заказы на партии могут включать целевой вес каждой партии, и/или количество. или диапазон нарезанных порций мяса птицы, которые должны быть включены в каждую партию. Показательный заказ партии может быть сделан для четырех филе грудки по 700 граммов, при этом ни одна отдельная порция не может быть больше 200 граммов или меньше 150 граммов. Данные заказа могут также включать в себя данные, относящиеся к заказам, которые должны быть выполнены с использованием обрезков. Например, обрезки с высокой стоимостью, такие как куриные наггетсы, могут требовать минимального целевого веса обрезков или целевого веса. В то время как негабаритные обрезки могут быть обрезаны для достижения целевого веса обрезков, эта дополнительная обработка будет уменьшать экономическую эффективность обрезков и уменьшать общую стоимость, извлеченную из порции мяса птицы, поэтому также может включать в себя максимальный вес обрезков. Данные о заказах могут также включать в себя данные о заказах на обрезки с низкой стоимостью, таких как заказы на переработанные продукты, в которых используются обрезки, непригодные для заказов с более высокой стоимостью.
Порция 10 мяса птицы, поступающая в систему 1 обработки мяса птицы, транспортируется конвейером 20 сначала к блоку 100 приёмочного контроля. Блок приёмочного контроля в этом варианте осуществления содержит блок рентгеновского излучения и может дополнительно содержать блок взвешивания, и/или камеру, или другой блок формирования изображений. Элементы блока 100 приёмочного контроля собирают данные о контроле на этапе S200, которые содержат, по меньшей мере, распределение массы, созданное, в данном случае, с помощью блока рентгеновского излучения, который может непосредственно отображать массу филе куриной грудки. Данные приёмочного контроля могут также включать в себя подробности об инородных объектах, таких как кусочки костей или пятна крови, обеспечивая данные, относящиеся к наличию, местоположению, размеру и форме инородного объекта. Данные приёмочного контроля могут также включать в себя вес, измеренный более точным блоком, чем блок рентгеновского излучения, и данные, относящиеся к зарегистрированному местоположению порции 10 на конвейере 20.
Блок 100 приёмочного контроля передает данные контроля блоку 50 управления на этапе S300. Затем блок управления может использовать данные контроля и данные заказа для определения целевого веса порции мяса птицы на этапе S400. Например, данные заказа могут включать в себя заказ на четыре филе грудки по 700 грамм без наличия отдельной порции более чем 200 грамм или менее чем 150 грамм, а также могут включать в себя заказ на куриные кусочки, каждый весом от 15 до 20 грамм. Если определено, что порция 10 мяса птицы имеет массу 212 граммов, система управления может определить целевой вес 195 граммов с 17 граммами обрезков, в результате чего оба элемента нарезанной порции мяса птицы могут быть использованы для выполнения заказа с более высокой стоимостью.
После определения целевого веса блок управления определяет план нарезки с использованием целевого веса и распределения массы на этапе S500. В этом варианте осуществления изобретения режущий блок производит резку вдоль плоскости под фиксированным углом к конвейеру, как будет более подробно описано ниже. Однако механический захват может расположить порцию мяса птицы перед разделкой, и, таким образом, блок управления может оценить некоторое количество различных положений вдоль порции мяса птицы, в которых плоскость разреза может быть расположена для нарезки порции мяса птицы. Блок управления идентифицирует, какое положение следует выбрать для резки, которое удовлетворяет критериям целевого веса.
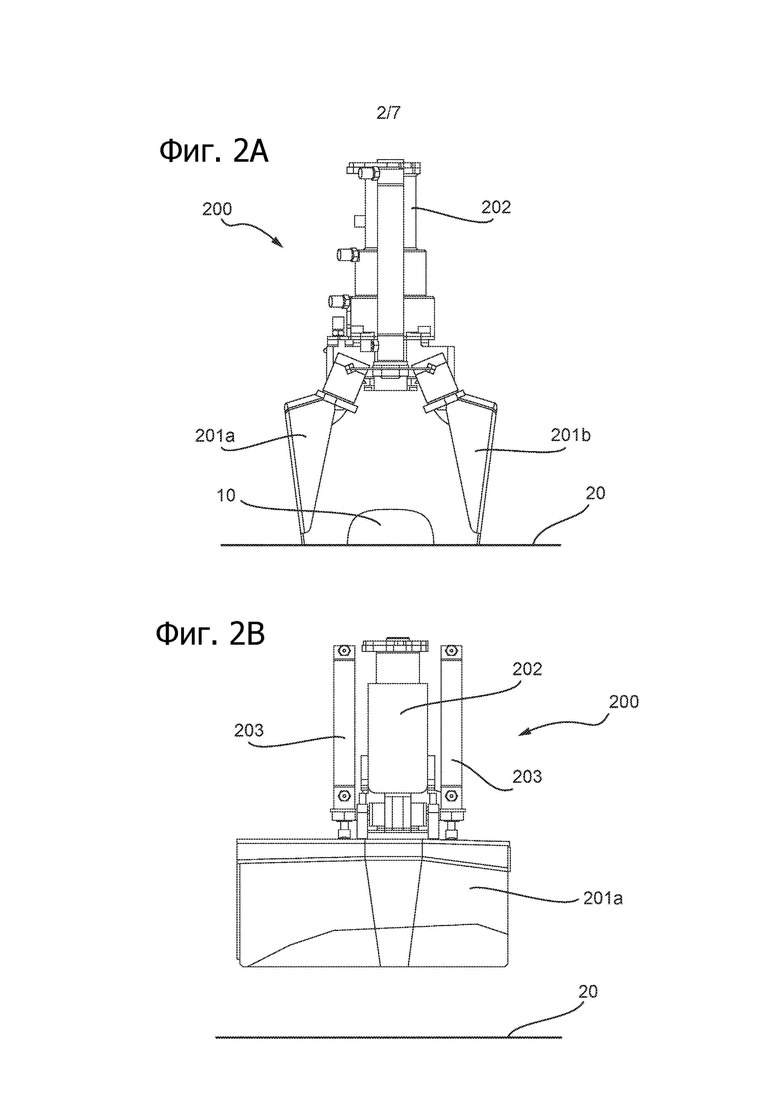
Порция 10 мяса птицы транспортируется к механическому захвату 200, который более подробно показан на фиг. 2A и 2B. Механический захват 200 содержит основную опорную стойку 202 и два поршня 203, расположенных на противоположных сторонах стойки 202. На нижнем конце стойки 202 расположена пара захватных губок, содержащих противолежащие элементы 201a, 201b губок, которые в закрытом положении определяют удлиненный V-образный канал между ними. Каждый элемент 201а, 201b губок шарнирно присоединён на его верхнем конце, вблизи опорной стойки, таким образом, что нижние концы губок выполнены с возможностью перемещения для открывания и закрывания V-образного канала. Захват соединен на верхнем конце стойки 202 с транспортным блоком (не показан). Транспортный блок способен вращать весь захват 200 вокруг центральной оси стойки, тем самым обеспечивая вращение механического захвата на 360°. Транспортный блок также может поднимать и опускать механический захват и осуществлять поступательное перемещение к захвату. Таким образом, система 50 управления может располагать захват таким образом, чтобы длина V-образного канала была выровнена с главной осью порции 10 мяса птицы. Затем захват может опуститься в нужное положение и закрыть губки 201a, 201b, чтобы захватить и собрать порцию птицы. Затем захват может дополнительно перемещаться и вращаться для изменения положения и ориентации порции мяса птицы относительно поверхности конвейера, тем самым выполняя этап S600 на фиг. 4.
Затем конвейер 20 транспортирует уложенную порцию 10 мяса птицы к режущему блоку 300, показанному на фиг. 3A - 3C. Режущий блок 300 содержит опорную раму 301. Режущий блок, удерживаемый над конвейером 20 с помощью опорной рамы 301, представляет собой вращающийся режущий блок. Вращающийся режущий блок содержит двигатель 302 и вращающееся режущее лезвие 303. Двигатель удерживает вращающееся режущее лезвие 303 под фиксированным углом 45° к поперечному размеру конвейера. Конвейер 20 содержит прорезь 21, проходящую по длине конвейера, в которую входит вращающееся режущее лезвие 303. Таким образом, прорезь предотвращает повреждение конвейера лезвием, в то же время позволяя лезвию полностью прорезать часть птицы. На фиг. 3C показана порция 10 мяса птицы в процессе резки режущим блоком 300 на этапе S700. Порция мяса птицы расположена таким образом, что лезвие делает надрез под углом 45° в более толстом конце куриной грудки, когда конвейер 20 перемещает куриную грудку 10 мимо стационарного режущего лезвия. Надрез под углом 45° в более толстом конце куриной грудки выполняется таким образом, что в обрезок входит в большей степени обращенная к стороне внутренней поверхности часть куриной грудки, чем обращенная к стороне наружной поверхности. Такое расположение разрезов гарантирует, что разрезанное филе куриной грудки выглядит практически целым при осмотре обращенной наружу поверхности грудки.
Как только разделка выполнена, данные заказа обновляются, чтобы отразить, что была произведена одна нарезанная порция мяса птицы, при этом нарезанная порция 11 мяса птицы и обрезки 12 транспортируются ниже по ходу процесса для дальнейшей обработки, например, для упаковки. Способ повторяется, начиная с этапа S200, когда выполняется контроль следующей порции мяса птицы. В то время как фиг. 4 предполагает, что инспектирование новой порции мяса птицы происходит только после этапа S800, на практике способ будет работать непрерывно, и новая порция мяса птицы обычно будет контролироваться в то время, пока обрабатывается первая порция мяса птицы.
Теперь будет описан второй вариант осуществления изобретения со ссылкой на фигуры 4 - 6.
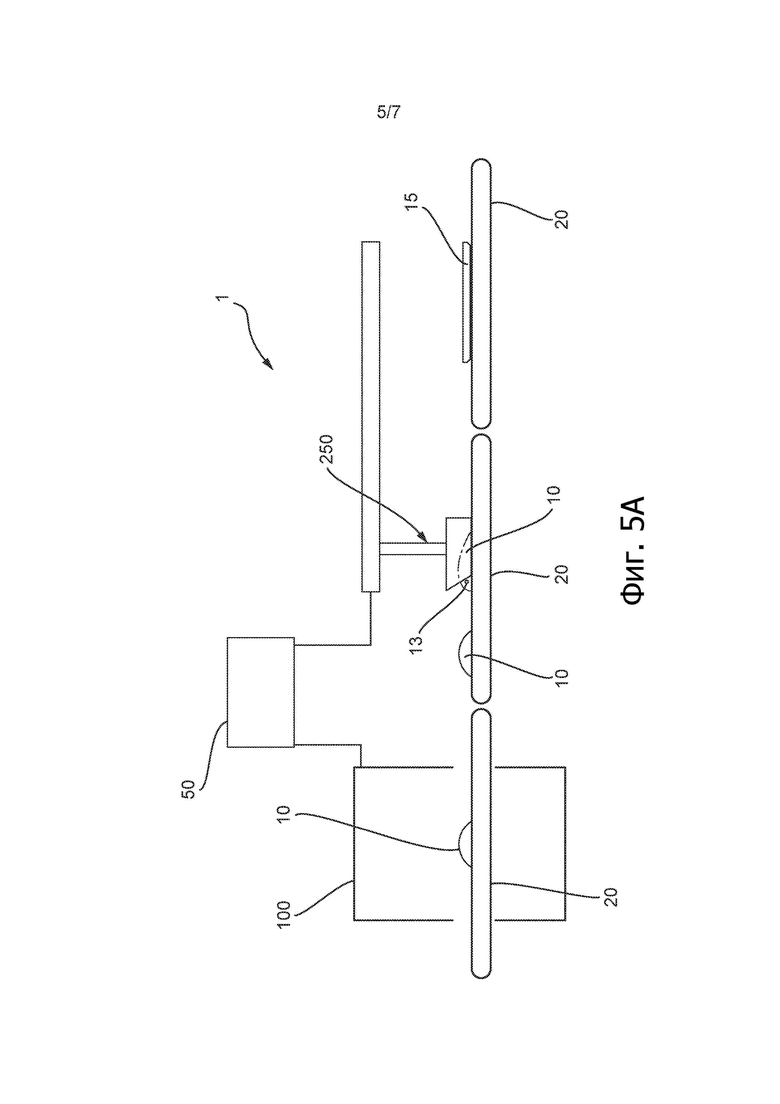
На фиг. 5A схематично показана другая система для реализации способа согласно изобретению. Система 1 содержит последовательность конвейеров 20, которые транспортируют ненарезанные порции 10 мяса птицы, в этом случае снова филе куриной грудки, прошедшие блок 100 приёмочного контроля и интегрированный блок 250 захвата и резки системы обработки мяса птицы, которые будут описаны более подробно ниже. Конечный конвейер 20 показан с лотком 15, в котором система обработки птицы формирует партию порций мяса птицы.
Система снова содержит блок управления 50, в который данные заказа вводятся на этапе S100. В этом варианте осуществления изобретения система 1 формирует партии нарезанных порций мяса птицы, и поэтому данные заказа включают в себя, например, заказы на два нарезанных филе куриной грудки общим весом 300 граммов, причем каждое филе имеет вес не менее 125 граммов и не более 175 грамм. Данные заказа также включают в себя данные, относящиеся к подлежащим исполнению продуктам из обрезков, как было описано выше.
Порция 10 мяса птицы, поступающая в систему 1 обработки птицы, транспортируется конвейером 20 сначала в блок 100 приёмочного контроля. Блок приёмочного контроля содержит блок рентгеновского излучения, блок взвешивания и камеру. Элементы блока 100 контроля собирают данные контроля на этапе S200, которые содержат распределение массы, сформированное, в данном случае, с помощью блока рентгеновского излучения, вес от блока взвешивания и данные изображения с камеры.
Блок 100 приёмочного контроля передает данные контроля блоку 50 управления на этапе S300. Затем блок приёмочного контроля может использовать данные контроля и данные заказа для определения целевого веса порции мяса птицы на этапе S400. В этом случае данные контроля включают в себя данные, показывающие, что кусок 13 кости содержится в представленной порции 10 мяса птицы, и указание того, что порция мяса птицы весит 184 грамма. На этапе S400 блок управления распознает наличие кусочка кости. Поскольку любые обрезки, включая кусочек 13 кости, будут либо отходами, либо потребуют дополнительной обработки для восстановления пригодного для использования состояния мяса птицы, блок управления выполнен с возможностью минимизировать размер обрезков, чтобы уменьшить количество идущего в отходы мяса птицы. Таким образом, блок 50 управления определяет целевой вес от 170 до 175 граммов, оставляя обрезки от 9 до 14 граммов, чтобы максимально увеличить количество мяса птицы, использованное для выполнения заказа.
После определения целевого веса блок 50 управления определяет план нарезки с использованием целевого веса, распределения массы и местоположения постороннего объекта на этапе S500. В этом варианте осуществления изобретения режущий блок снова выполняет резку вдоль плоскости под фиксированным углом, и поэтому блок 50 управления определяет положение разреза, которое должно быть выполнено на основе распределения массы, которое удовлетворяет критериям целевого веса и которое включает в себя кусок кости 13 в обрезанной порции 12.
Затем часть 10 мяса птицы транспортируется к интегрированному блоку 250 захвата и резки, который более подробно показан на фиг. 6. Интегрированный блок 250 захвата и резки содержит основную опорную стойку 252 и два поршня 253, расположенных на противоположных сторонах стойки 252. На нижнем конце стойки 252 расположена пара зажимных губок, содержащих противоположные элементы 251a, 251b губок, которые в закрытом положении определяют удлиненный V-образный канал между ними со скошенной кромкой на переднем конце канала и на нижней кромке элементов 251a, 251b губок, которые будут дополнительно описаны ниже. Каждый элемент 251a, 251b губок шарнирно присоединен на его верхнем конце, поблизости от опорной стойки, таким образом, что нижние концы губок выполнены с возможностью перемещения для открывания и закрывания V-образного канала. Захват соединен на верхнем конце стойки 252 с транспортным блоком (не показан). Транспортный блок выполнен с возможностью поворачивать весь захват и режущий блок 250 вокруг центральной оси стойки 252, тем самым обеспечивая вращение механического захвата на 360°. Транспортный блок также выполнен с возможностью поднимать и опускать механический захват. Наконец, транспортный блок выполнен с возможностью перемещать механический захват по направляющему устройству между местоположением подбора, показанным на фиг. 5A, и местоположением раздачи, показанным на фиг. 5b. Местоположение подбора - это место, в котором захват собирает порцию мяса птицы, подлежащую нарезке. Местоположение раздачи будет описано более подробно ниже.
Блок 250 захвата и резки также включает в себя режущий блок 350. Режущий блок содержит опорный элемент 351, который проходит от опорной стойки 252 к исполнительному механизму 352. Исполнительный механизм действует на режущее лезвие 353, которое расположено под углом 45° к длинной оси V-образного канала, определяемого губками 251a, 251b. Режущее лезвие 353 в выдвинутом положении проходит вдоль кромки губок 251a, 251b на скошенной кромке. Исполнительный механизм 352 приводит в действие режущее лезвие 353 для его перемещения, подобного гильотине, поднимая и опуская лезвие вдоль скошенной кромки. Это перемещение лезвия 353 обеспечивает то, что передний конец любой порции мяса птицы, удерживаемой в губках 251a, 251b, принимает разрез под углом 45°, тем самым создавая обрезку порции мяса птицы.
Вышеописанный блок 250 захвата и резки используется для первого захватывания порции мяса птицы и размещения порции мяса птицы на этапе S600, поднимая порцию мяса птицы с конвейера, до того, как гильотинное перемещение режущего лезвия 353 выполнит этап S700 посредством разрезания порции мяса птицы, в соответствии с планом нарезки. Обрезка, содержащая кусок 13 кости, падает на конвейер 20 ниже. Если блок 250 захвата и резки включает в себя соединение с элементами 251a, 251b губок, которые выполнены с возможностью измерять вес, захват может в этом случае определить точный вес отрезанной порции мяса птицы и передать эту информацию в блок управления.
Как показано на фиг. 5B, узел 250 захвата и нарезки затем перемещается транспортным блоком к отдельному конвейеру 20, на котором установлен лоток 15. На фиг. 5B лоток 15 показан расположенным ниже по ходу процесса вдоль конвейеров, на которых порция мяса птицы вошла в систему; однако это положение показано просто для ясности. Обычно лоток 15 устанавливается на параллельной конвейерной линии, таким образом позволяя обрезкам проходить ниже по ходу процесса вдоль конвейеров, для дальнейшей обработки. Блок 250 захвата и нарезки выдает нарезанную порцию 11 мяса птицы в лоток 15 и обновляет данные заказа, чтобы отразить, что текущая партия имеет одну нарезанную порцию 11 мяса птицы весом от 170 до 175 граммов. Если вес был снят после того, как была выполнена нарезка, этот вес, используемый для обновления данных заказа, может быть более точным.
Затем способ возвращается к этапу S200 для следующей порции мяса птицы. Теперь блок управления будет использовать данные приёмочного контроля и определять целевой вес для последующей нарезанной порции мяса птицы на основе обновленных данных заказа, которые отражают, что требуется нарезанная порция мяса птицы весом 125 - 130 граммов.
В альтернативной версии варианта осуществления изобретения, показанного на фиг. 5A и 5B, между блоком 100 приёмочного контроля и блоком 250 захвата может содержаться буферная зона, что позволяет блоку управления собирать данные контроля по множеству поступающих порций мяса птицы. Если, например, такая система находилась в рабочем состоянии, как описано выше, то есть с заказом на партии из двух нарезанных филе куриных грудок общим весом 300 грамм, и с каждым филе, имеющим вес не менее 125 грамм и не более чем 175 грамм, блок управления может использовать эту буферную зону для лучшего выполнения заказа. Например, блок управления может распознавать первую порцию мяса птицы весом 184 грамма и вторую порцию мяса птицы весом 200 граммов. На этом основании блок управления может определить, что первая порция мяса птицы должна быть уменьшена, например, до 140 граммов, чтобы уменьшить размер обрезков, которые необходимо сделать на второй порции мяса птицы весом 200 граммов, и гарантировать, что оба обрезка можно использовать для получения обрезков с высокой стоимостью без значительной дальнейшей обработки.

Способ обработки порций пищевых продуктов включает определение в блоке управления целевого веса нарезанной порции пищевого продукта. Приёмочный контроль порции пищевого продукта осуществляется с использованием блока приёмочного контроля для определения распределения массы упомянутой порции пищевого продукта и обеспечения упомянутого распределения массы для блока управления. Вычисляется план нарезки порции пищевого продукта на основе целевого веса и распределения массы с использованием блока управления. Для захватывания порции пищевого продукта и размещения упомянутой порции пищевого продукта для выполнения плана нарезки используют механический захват. Нарезание порции пищевого продукта с использованием режущего блока осуществляется в соответствии с планом нарезки, чтобы привести нарезанную порцию пищевого продукта в соответствие с целевым весом. Нарезанные порции пищевого продукта разгружают в местоположение для разгрузки, отдельно от местоположения для подбора, с использованием механического захвата. Также раскрывается соответствующая система для обработки порций пищевых продуктов. Изобретение обеспечивает более эффективную обработку поступающих порций пищевых продуктов при изменениях их веса. 2 н. и 27 з.п. ф-лы, 10 ил.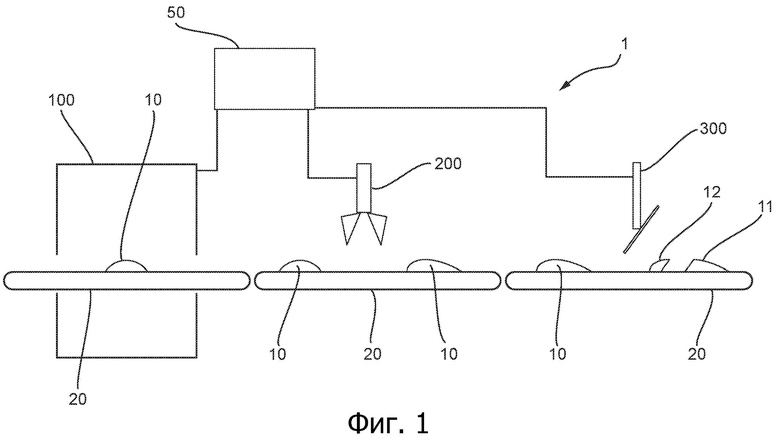
1. Способ обработки порций пищевых продуктов, включающий в себя следующие этапы:
определение в блоке управления целевого веса нарезанной порции пищевого продукта;
приёмочный контроль порции пищевого продукта с использованием блока приёмочного контроля для определения распределения массы упомянутой порции пищевого продукта и обеспечения упомянутого распределения массы для блока управления;
вычисление плана нарезки порции пищевого продукта на основе целевого веса и распределения массы с использованием блока управления;
использование механического захвата для захватывания порции пищевого продукта и размещения упомянутой порции пищевого продукта для выполнения плана нарезки; а также
нарезание порции пищевого продукта с использованием режущего блока, в соответствии с планом нарезки, чтобы произвести нарезанную порцию пищевого продукта, в соответствии с целевым весом, и
разгрузку нарезанной порции пищевого продукта в местоположении для разгрузки, отдельно от местоположения для подбора, с использованием механического захвата.
2. Способ по п. 1, отличающийся тем, что способ включает в себя формирование партии порций пищевого продукта, причём целевой вес определяется на основе целевого веса партии и веса представленной неполной партии.
3. Способ по п. 2, в котором целевой вес определяется на основании целевого количества порций пищевого продукта в упомянутой партии и количества порций пищевого продукта в упомянутой представленной неполной партии.
4. Способ по п. 2 или 3, в котором целевой вес определяется на основании веса упомянутой порции пищевого продукта, и/или на основании веса одной или нескольких порций пищевого продукта, расположенных выше по ходу процесса от упомянутой порции пищевого продукта.
5. Способ по любому из пп.2-4, дополнительно включающий в себя определение в блоке управления нового целевого веса для последующей нарезанной порции пищевого продукта, причем упомянутый новый целевой вес определяется на основе, по меньшей мере, целевого веса партии и обновленного веса представленной неполной партии и, по необязательному выбору, на основе целевого количества порций пищевого продукта в упомянутой партии и обновленного количества порций пищевого продукта в упомянутой представленной неполной партии и, кроме того, по необязательному выбору, на основе веса последующей порции пищевого продукта и/или веса одной или более порций пищевого продукта, расположенных выше по ходу процесса от упомянутой последующей порции пищевого продукта.
6. Способ по любому из предшествующих пунктов, в котором определение целевого веса основывается на одном или нескольких параметрах из числа целевого минимального веса обрезков, целевого максимального веса обрезков и целевого веса обрезков.
7. Способ по любому из предшествующих пунктов, в котором определение целевого веса основано на минимальном и/или максимальном весе нарезанной порции пищевого продукта.
8. Способ по любому из предшествующих пунктов, в котором блок приёмочного контроля содержит блок взвешивания, а приёмочный контроль порции пищевого продукта включает в себя взвешивание упомянутой порции пищевого продукта с помощью блока взвешивания.
9. Способ по любому из предшествующих пунктов, в котором блок приёмочного контроля содержит блок формирования изображения, а приёмочный контроль порции пищевого продукта включает в себя формирование изображения упомянутой порции пищевого продукта с помощью блока формирования изображения, чтобы определить распределение объема упомянутой порции пищевого продукта.
10. Способ по любому из предшествующих пунктов, в котором блок приёмочного контроля содержит блок сканирования, а приёмочный контроль порции пищевого продукта включает в себя сканирование упомянутой порции пищевого продукта с помощью блока сканирования, при этом упомянутый блок сканирования предпочтительно представляет собой ультразвуковой блок или блок рентгеновского излучения.
11. Способ по любому из предшествующих пунктов, дополнительно включающий в себя контроль порции пищевого продукта, чтобы идентифицировать предварительно заданную анатомическую область упомянутой порции пищевого продукта, и вычисление плана нарезки на основе распределения массы и предварительно заданной анатомической области.
12. Способ по п. 11, в котором вычисление плана нарезки включает в себя идентификацию линии разреза в предварительно заданной анатомической области, создающую разрезанную порцию пищевого продукта, которая соответствует целевому весу.
13. Способ по любому из предшествующих пунктов, дополнительно включающий в себя контроль порции пищевого продукта с целью идентификации главной оси порции пищевого продукта, при этом вычисление плана нарезки включает в себя вычисление линии разреза относительно главной оси.
14. Способ по п. 13, в котором вычисление линии разреза относительно главной оси включает в себя вычисление линии разреза, определяющей в общем острый угол относительно главной оси.
15. Способ по п. 13, в котором вычисление линии разреза относительно главной оси включает в себя вычисление линии разреза, в общем определяющей плоскость, параллельную главной оси.
16. Способ по любому из предшествующих пунктов, дополнительно включающий в себя контроль порции пищевого продукта, чтобы идентифицировать присутствие и местоположение постороннего предмета внутри порции пищевого продукта, при этом вычисление плана нарезки дополнительно основывается на местоположении инородного объекта, и, по необязательному выбору, определение целевого веса основано на присутствии постороннего объекта.
17. Способ по любому из предшествующих пунктов, в котором размещение упомянутой порции пищевого продукта для выполнения плана нарезки включает в себя перемещение упомянутой порции пищевого продукта относительно режущего блока.
18. Способ по любому из предшествующих пунктов, дополнительно включающий в себя транспортировку порции пищевого продукта к механическому захвату с использованием транспортировочного блока.
19. Способ по п. 18, в котором захватывание порции пищевого продукта включает в себя поднятие порции пищевого продукта с упомянутого транспортировочного блока.
20. Способ по п. 18 или 19, в котором размещение упомянутой порции пищевого продукта для выполнения плана нарезки включает в себя перемещение порции пищевого продукта на упомянутом транспортировочном блоке, и при этом упомянутый транспортировочный блок впоследствии используется для транспортировки порции пищевого продукта к режущему блоку.
21. Способ по любому из пп.1-19, включающий в себя нарезку порции пищевого продукта, в то время как упомянутая порция пищевого продукта захватывается механическим захватом.
22. Способ по любому из предшествующих пунктов, в котором механический захват содержит блок взвешивания, при этом способ дополнительно включает в себя взвешивание нарезанной порции пищевого продукта с помощью механического захвата после выполнения плана нарезки.
23. Способ по любому из предшествующих пунктов, в котором режущий блок выполнен с возможностью резания вдоль предварительно заданного направления резания, и при этом захватывание упомянутой порции пищевого продукта включает в себя размещение упомянутой порции пищевого продукта относительно предварительно заданного направления резания таким образом, чтобы режущий блок был способен выполнять нарезку упомянутой порции пищевого продукта в соответствии с планом нарезки.
24. Способ по любому из предшествующих пунктов, отличающийся тем, что способ включает в себя формирование партии порций пищевого продукта, при этом местоположением для разгрузки является упаковка для партии порций пищевого продукта.
25. Способ по любому из предшествующих пунктов, в котором режущий блок (350) содержит режущее лезвие, причем лезвие предпочтительно выполнено с возможностью разрезания в одной режущей плоскости.
26. Способ по любому из предшествующих пунктов, включающий в себя определение множества целевых значений веса, при этом каждое целевое значение веса связано с соответствующим заказом, который должен быть выполнен, и дополнительно включающий в себя выбор одного из множества целевых значений веса, который наилучшим образом соответствует контролируемой порции пищевого продукта, при этом вычисление плана нарезки основано на выбранном целевом значении веса и распределении массы проконтролированной порции пищевого продукта.
27. Способ по п. 26, в котором выбор одного из множества целевых значений веса, который наилучшим образом соответствует контролируемой порции пищевого продукта, основан на одном или нескольких параметрах из числа оцениваемого веса обрезков, наличия и/или местоположения посторонних объектов, веса одной или нескольких порций пищевого продукта, расположенных выше по ходу процесса от упомянутой порции пищевого продукта, прогнозируемого обновленного веса партии для одного или нескольких заказов, которые должны быть выполнены, прогнозируемого обновленного количества порций пищевого продукта в партии для одного или нескольких заказов, которые должны быть выполнены, и общего количества каждого вида заказа.
28. Система для обработки порций пищевых продуктов, содержащая:
блок управления, приспособленный для определения целевого веса нарезанной порции пищевого продукта и вычисления плана нарезки порции пищевого продукта на основе целевого веса и распределения массы упомянутой порции пищевого продукта;
блок приёмочного контроля, приспособленный для контроля порции пищевого продукта, чтобы определять распределение массы упомянутой порции пищевого продукта, а также для обеспечения упомянутого распределения массы для блока управления;
механический захват, приспособленный для захватывания порции пищевого продукта и размещения упомянутой порции пищевого продукта для выполнения плана нарезки; а также
режущий блок, приспособленный для разрезания порции пищевого продукта, в соответствии с планом нарезки, чтобы произвести разрезанную порцию пищевого продукта, в соответствии с целевым весом разрезанной порции пищевого продукта; и
при этом механический захват выполнен с возможностью разгрузки нарезанной порции пищевого продукта в местоположении для разгрузки, отдельно от местоположения для подбора.
29. Система по п. 28, приспособленная для выполнения способа по любому из пп.1-27.
| WO 2007022782 A3, 01.03.2007 | |||
| US 20040134319 A1, 15.07.2004 | |||
| US 8643851 B2, 04.02.2014 | |||
| US 20170210023 A1, 27.07.2017 | |||
| EP 3045882 A1, 20.07.2016 | |||
| МЯСНОЙ ПРОДУКТ И СПОСОБ ИЗГОТОВЛЕНИЯ МЯСНОГО ПРОДУКТА (ВАРИАНТЫ) | 2004 |
|
RU2254789C1 |

