Область техники, к которой относится изобретение
Настоящее раскрытие относится к аппарату для инсектицидного опрыскивания, способу и аппарату управления инсектицидным опрыскиванием и датчику насекомых для детектирования насекомых.
Уровень техники
Существует всеобщая потребность в оптимизации использования инсектицидов в сельском хозяйстве.
В частности, при распределении инсектицидов по полю с посевами или иному участку, где нужна дезинсекция, обычно желательно, чтобы используемые типы и количества инсектицидов обеспечивали эффективную дезинсекцию без использования ненужных, бесполезных или даже вредных для окружающей среды количеств инсектицидов.
При этом количество насекомых может быть разным не только в разное время, но и в разных частях отдельно взятого участка, в связи с чем использование эффективных количеств инсектицидов является сложной задачей. В частности, насекомые зачастую неравномерно распределены по участку, при этом могут возникать очаги локальных высоких концентраций насекомых. Кроме того, местоположение таких очагов может быть разным в разное время.
В WO 2016/025848 раскрыта передвижная платформа, конструктивно и функционально выполненная с возможностью: сбора данных о фенотипах и/или генотипах на месте (в поле); сбора видеоданных; взятия образцов тканей; выбора и/или подсчета растений, произрастающих на участке; измерения высоты растений; использования препаратов и обработки в отношении растений, произрастающих на участке (например, нормативных инсектицидных препаратов или тех, что используют с учетом локальных особенностей); взятия образцов почвы в местах произрастания растений; удаления сорняков на таких участках; анализа всех собранных данных и/или образцов в режиме реального времени. В частности, передвижная платформа включает в себя устройство формирования изображений, подвешенное над поверхностью грунта, с направленным вниз полем обзора, охватывающим одно или несколько растений в желаемом числе рядов растений.
В US 9655356 раскрыт аппарат для ухода за газоном, в котором наличие участка, требующего выборочной обработки гербицидом, пестицидом или фунгицидом, детектируют посредством сканера. Указанный аппарат содержит многокамерный картридж, содержащий различные химикаты, и выборочно использует их. В частности, в данном противопоставленном документе описана газонокосилка, содержащая передний сканер с возможностью оптического сканирования участка перед газонокосилкой. Передний сканер испускает световой пучок, посредством которого освещают траву/сорняки/муравьиные кучи перед газонокосилкой.
Несмотря на то, что вышеуказанные прототипы представляют собой системы детектирования зараженных вредителями растений или куч насекомых (типа муравейников, термитников и т.д.) на земле, остается нерешенной проблема, состоящая в том, что многие сельскохозяйственные машины вспугивают насекомых во время движения машины через поле. Кроме того, многие из насекомых, против которых нужно выполнить обработку, могут летать или прыгать и, следовательно, улетать или отскакивать, в частности, если их спугнет сельскохозяйственная машина, что усложняет их детектирование.
Поэтому существует всеобщая потребность в повышении достоверности детектирования и идентификации насекомых, в частности вблизи движущегося сельскохозяйственного транспортного средства.
Кроме того, существует всеобщая потребность в создании простого в использовании и эффективного аппарата для распределения инсектицида по участку земли.
Также все еще существует потребность в создании несложного, но надежного, датчика насекомых, позволяющего быстро детектировать движущихся насекомых.
Раскрытие сущности изобретения
Согласно одному аспекту, раскрыты варианты осуществления аппарата для распределения инсектицида по участку земли, при этом участок земли образует поверхность грунта. Аппарат включает в себя:
- транспортное средство, выполненное с возможностью движения по пути движения по поверхности грунта, при этом направление движения задано транспортным средством, при этом транспортное средство содержит устройство распределения инсектицида, выполненное с возможностью распределения инсектицида вдоль указанного пути движения во время движения транспортного средства по пути движения;
- систему управления распределением, выполненную с возможностью управления количеством инсектицида, подлежащего распределению во время движения транспортного средства по пути движения;
- датчик насекомых, выполненный с возможностью детектирования находящихся в воздухе насекомых в объеме детектирования во время движения объема детектирования относительно поверхности грунта; причем объем детектирования расположен перед транспортным средством по направлению движения и приподнят над поверхностью грунта на минимальное вертикальное расстояние;
причем система управления распределением выполнена с возможностью приема данных от датчика насекомых, при этом данные датчика указывают результат детектирования насекомых в объеме детектирования, и управления распределением инсектицида в зависимости от принятых данных датчика.
В частности, данные датчика могут указывать количество насекомых, детектированных в движущемся объеме детектирования, за период выборки. Таким образом, система управления распределением может быть выполнена с возможностью управления распределением инсектицида на месте распределения в зависимости от данных датчика, указывающих локальную популяцию насекомых, в частности указывающих результат детектирования насекомых в объеме детектирования над местом проведения детектирования, расположенным вблизи места распределения.
Таким образом, аппарат выполнен с возможностью локального регулирования распределения инсектицида в зависимости от фактического присутствия насекомых в указанном месте или вблизи него, т.е. изменения количества распределяемого вдоль пути движения инсектицида в зависимости от результата детектирования насекомых, тем самым обеспечивая возможность эффективного использования инсектицида. Кроме того, поскольку распределение осуществляют в зависимости от результата детектирования насекомых перед распределяющим транспортным средством и над поверхностью грунта, управление корректируют в зависимости от текущей и локальной информации и с учетом находящихся в воздухе насекомых, в частности летающих или прыгающих насекомых.
Управление распределением может включать в себя управление количеством подлежащего распределению инсектицида и/или типом подлежащего распределению инсектицида в любом отдельно взятом месте вдоль пути движения. Для этого система управления распределением может быть выполнена с возможностью управления одним или несколькими клапанами, насосами и/или иными устройствами регулирования расхода для управления количеством инсектицида или выбора типа инсектицида, подлежащего распределению посредством одного или нескольких дозаторов.
Например, распределением можно управлять путем запуска распределения инсектицида только тогда, когда количество детектированных насекомых (или количество детектированных насекомых определенного типа) выше заданного предела. В некоторых вариантах осуществления транспортное средство выполнено с возможностью распределения инсектицида из множества выходов, например, сопел, например, так чтобы соответствующие выходы распределяли инсектицид на соответствующие места. Система управления распределением может дополнительно управлять распределением инсектицидов через выбранные выходы, тем самым обеспечивая еще более точное управление распределением. Такое выборочное распределение можно осуществлять, например, в зависимости от результата детектирования насекомых в соответствующих частях объема детектирования.
Транспортное средство может представлять собой наземное транспортное средство, т.е. транспортное средство, работающее будучи в соприкосновении с поверхностью грунта. Наземное транспортное средство может перемещаться, например, на колесах, или т.п. Например, наземное транспортное средство может представлять собой трактор или иное сельскохозяйственное транспортное средство. В число других примеров транспортных средств входят летательные аппараты, например, самолет, вертолет или т.п. Транспортное средство может быть пилотируемым или беспилотным.
Объем детектирования может иметь множество разных форм и размеров, например, коробчатую форму, форму цилиндра, шара, конуса, пирамиды, усеченного конуса, усеченной пирамиды и т.п. В некоторых вариантах осуществления размер объема детектирования составляет по меньшей мере 0,2 м3, например по меньшей мере 0,5 м3, например по меньшей мере 1 м3, например по меньшей мере 2 м3, например по меньшей мере 3 м3. В некоторых вариантах осуществления отношение сторон объема детектирования, например, определяемое как отношение наибольшей стороны к наименьшей стороне минимальной ограничительной рамки объема детектирования, составляет не более 10:1, например, не более 5:1, например, не более 3:1, например, не более 2:1. Например, отношение сторон может составлять от 1:1 до 10:1, например, от 1:1 до 5:1, например, от 1:1 до 3:1, например, от 2:1 до 3:1. Минимальная ограничительная рамка может образовывать вертикальную сторону и две горизонтальные стороны. Вертикальная сторона может представлять собой наименьшую сторону минимальной ограничительной рамки. Например, отношение каждой из горизонтальных сторон к вертикальной стороне может составлять от 2:1 до 10:1, например, от 2:1 до 5:1, например, от 2:1 до 3:1.
Было установлено, что объем детектирования размером по меньшей мере 0,2 м3, например, по меньшей мере 0,5 м3, например, по меньшей мере 1 м3, например, по меньшей мере 2 м3, например, по меньшей мере 3 м3, достаточно для детектирования популяций насекомых с точностью, достаточной для эффективного управления распределением инсектицида. Также было установлено, что низкое отношение сторон объема детектирования позволяет отслеживать движущихся насекомых в течение относительно длительного периода времени, независимо от направления движения насекомых, и, благодаря этому, более точно детектировать и идентифицировать насекомых.
Объем детектирования приподнят над поверхностью грунта на минимальное вертикальное расстояние. В некоторых вариантах осуществления объем детектирования проходит от верха растительного покрова вверх. Это позволяет избежать или по меньшей мере уменьшить помехи, создаваемые растительностью для датчика насекомых, например, путем блокирования траектории света. Для этого минимальное вертикальное расстояние может быть задано заранее, например, настроено до начала использования, например, для коррекции минимального вертикального расстояния с учетом размеров транспортного средства, на котором смонтирован датчик насекомых, и/или подлежащей на текущий момент обработке растительности. Например, датчик насекомых может быть смонтирован на транспортном средстве с возможностью коррекции вертикального расстояния от датчика насекомых до поверхности грунта и/или ориентации датчика насекомых относительно поверхности грунта. Величина вертикального расстояния может зависеть от высоты растительности, произрастающей на подлежащем обработке участке земли. Она может быть больше высоты растительности, например, больше максимальной высоты в популяции растений, образующих подлежащую обработке растительность, или больше средней высоты в популяции подлежащих обработке растений. Например, минимальное вертикальное расстояние может быть выбрано из следующих: от 10 см до 5 м, например от 20 см до 3 м, например от 20 см до 2 м, например, от 50 см до 2 м.
В частности, раскрытые в настоящем документе варианты осуществления датчика насекомых пригодны для детектирования находящихся в воздухе насекомых, например, летающих или прыгающих насекомых, в частности для детектирования таких насекомых с движущегося транспортного средства. Раскрытые в настоящем документе варианты осуществления датчика насекомых позволяют детектировать насекомых, движущихся в объеме детектирования в течение периодов наблюдения, достаточно длительных для достоверной идентификации и отличения друг от друга разных типов насекомых, например, путем определения частот взмахов крыльев и/или по классификации траекторий.
Было установлено, что указанные методы обеспечивают достоверное детектирование и идентификацию насекомых при достаточно длительном нахождении отдельных насекомых в объеме детектирования.
В некоторых вариантах осуществления датчик насекомых содержит осветительный модуль, выполненный с возможностью освещения объема детектирования, в частности всего объема детектирования, и детекторный модуль, содержащий один или несколько детекторов, выполненных с возможностью детектирования света из объема детектирования, в частности из всего объема детектирования. В частности, осветительный модуль выполнен с возможностью освещения объема детектирования освещающим светом, а детекторный модуль выполнен с возможностью детектирования обратно-рассеянной части освещающего света, при этом данная часть является результатом обратного рассеяния насекомыми, движущимися по объему детектирования. Авторы настоящего изобретения установили, что детектирование и анализ света, в частности обратно-рассеянного света от освещенных насекомых, позволяет достоверно детектировать и идентифицировать насекомых.
Объем детектирования представляет собой трехмерный объем, из которого датчик насекомых получает входной сигнал датчика, пригодный для детектирования насекомых. Таким образом, объем детектирования может полностью или частично зависеть от поля обзора и глубины поля детекторного модуля. В вариантах осуществления, где объем детектирования освещает осветительный модуль, объем детектирования может быть образован областью перекрытия объема, освещаемого осветительным модулем, и объема, зависящего от поля обзора и глубины поля детекторного модуля.
Объем детектирования может иметь предварительно заданную форму, размер и положение относительно осветительного модуля и относительно детекторного модуля, например, относительно апертурной диафрагмы и/или оптической оси детекторного модуля. В частности, объем детектирования может, в течение всего процесса детектирования, быть неподвижным относительно детекторного модуля и осветительного модуля. Детекторный модуль может содержать одну или несколько линз, образующих оптическую ось детекторного модуля и/или фокусное расстояние. Фокусное расстояние может быть постоянным в течение всего процесса детектирования. Оптическая ось также может быть постоянной, например, относительно осветительного модуля и/или относительно кожуха аппарата, в течение всего процесса детектирования. При этом следует понимать, что аппарат может быть выполнен с возможностью предварительной настройки и коррекции размера, формы и/или относительного положения объема детектирования с учетом конкретных условий измерений, например, путем изменения относительного положения и/или ориентации осветительного модуля и детекторного модуля. Детекторный модуль может также содержать апертурную диафрагму.
В некоторых вариантах осуществления размер объема детектирования составляет менее 20 м3, например, менее 10 м3, например, менее 5 м3, что обеспечивает равномерное освещение с высокой яркостью всего объема детектирования с одновременным обеспечением достоверного детектирования траекторий и/или частот взмахов крыльев.
В некоторых вариантах осуществления осветительный модуль содержит источник света, выполненный с возможностью испускания некогерентного света. В число подходящих источников света входят светоизлучающие диоды (СИД) и галогенные лампы, так как они способны одновременно освещать большие объема детектирования с достаточной интенсивностью света. Возможно использование дополнительных источников некогерентного света для обеспечения монохроматического, без спеклов, освещения объема детектирования, в частности одновременного освещения большого объема детектирования без необходимости выполнения какой-либо операции сканирования. Это упрощает оптическую систему и обеспечивает возможность достоверного определения частот взмахов крыльев и/или траекторий даже в случае быстрого движения насекомых.
При этом возможно использование других источников света, в том числе источников когерентного света, например, лазеров, вместо вышеуказанных. В некоторых вариантах осуществления источник света выполнен с возможностью непрерывного излучения света, а в других вариантах осуществления свет включают и выключают периодически, например, в импульсном режиме.
В некоторых вариантах осуществления осветительный модуль содержит источник света, выполненный с возможностью испускания когерентного или не когерентно го света в видимой области, и/или инфракрасной, и/или ближней инфракрасной областях, и/или света в одном или нескольких других диапазонах длин волн. Многие насекомые неспособны воспринимать свет в инфракрасной и/или ближней инфракрасной областях (например, свет в диапазоне длин волн от 700 нм до 1500 нм, например от 700 нм до 1000 нм), в связи с чем он не влияет на их поведение.
В некоторых вариантах осуществления осветительный модуль выполнен с возможностью выборочного освещения объема детектирования светом в двух или более диапазонах длин волн, в частности двух или более отстоящих друг от друга диапазонах длин волн. Для этого осветительный модуль может включать в себя первый источник света, например, содержащий один или несколько СИД, выполненных с возможностью выборочного испускания света в первом диапазоне длин волн. Осветительный модуль может дополнительно включать в себя второй источник света, например, содержащий один или несколько СИД, выполненных с возможностью выборочного испускания света во втором диапазоне длин волн, который может отстоять от первого диапазона длин волн. Детекторный модуль может быть выполнен с возможностью выборочного детектирования волн выбранных диапазонов. В одном варианте осуществления осветительный модуль выполнен с возможностью испускания света в первом диапазоне длин волн 810 нм +/-25 нм и света во втором диапазоне длин волн 980 нм +/-25 нм. Указанная многоспектральная система освещения облегчает детектирование движущихся насекомых по цвету.
Обычное освещение относительно большого объема детектирования, в частности одновременное освещение объема детектирования, посредством компактного осветительного модуля, можно обеспечить, например, если осветительный модуль выполнен с возможностью испускания расходящегося пучка света, в частности пучка света с углом расходимости по меньшей мере в одном направлении от 2° до 45°, например, от 10° до 30°, измеряемым как полный угол между лучами, исходящими из указанного источника света и пересекающими противоположные концы диаметра пучка.
Осветительный модуль может, например, включать в себя один или несколько оптических элементов, например, один или несколько рефлекторов и/или одну или несколько линз, направляющих свет из источника света в виде пучка света, например, расходящегося пучка света, с поперечным сечением подходящей формы в сторону объема детектирования. Например, поперечное сечение пучка света может быть прямоугольным или округлым, например, овальным или круглым.
Соответственно, объем детектирования может иметь форму усеченного конуса или усеченной пирамиды.
При детектировании движущихся насекомых в поле с растительностью было установлено, что предпочтительной формой основания/поперечного сечения усеченно-конического или усеченно-пирамидального объема детектирования является, в частности, продолговатая (например, эллиптическая или прямоугольная) форма. В частности, ширина продолговатого поперечного сечения / основания (измеренная в горизонтальном направлении) больше его высоты (измеренной в вертикальном направлении), например, отношение ширины к высоте составляет по меньшей мере 3:2, например по меньшей мере 2:1, например от 3:2 до 5:1, например от 3:2 до 3:1, например от 2:1 до 3:1. Объем детектирования с продолговатым поперечным сечением и горизонтальной продольной осью, причем объем детектирования приподнят над поверхностью грунта на минимальное вертикальное расстояние, обеспечивает возможность расположения объема детектирования в виде относительно плоского объема, например, плоского коробчатого объема или объема, в целом имеющего форму плоского сектора, т.е. расположения его по горизонтали над пологом растительности. Такой объем позволяет уменьшить отражения, рассеивание света или иные возмущающие влияния, создаваемые растениями, которые в ином случае могли бы создавать помехи для процесса детектирования. Авторы настоящего изобретения также установили, что такой объем детектирования позволяет эффективно использовать располагаемую мощность освещения для освещения объема, где по большей части имеет место активность насекомых.
Поскольку в некоторых вариантах осуществления объем детектирования образован областью перекрытия освещаемого объема и объема, зависящего от поля обзора и глубины поля детекторного модуля, осветительный модуль может быть выполнен с возможностью освещения конического, или пирамидального, или усеченно-конического, или усеченно-пирамидального освещаемого объема, в частности с продолговатым основанием / поперечным сечением, как раскрыто выше на примере объема детектирования.
В некоторых вариантах осуществления детекторный модуль содержит съемочную камеру, в частности съемочную камеру с полем обзора и глубиной поля, достаточно большими для регистрации сфокусированных изображений всего объема детектирования. Съемочная камера позволяет детектировать события возмущающих влияний, например, пересечения более крупными животными и растениями объема детектирования. Съемочная камера может также служить в качестве детектора для детектирования фонового излучения. В некоторых вариантах осуществления снятые изображения могут служить для детектирования и/или идентификации процессором насекомых, например, путем детектирования траекторий находящихся в воздухе насекомых и идентификации типов насекомых по соответствующим схемам траектории. Пример способа идентификации насекомых по зарегистрированным траекториям насекомых раскрыт в также находящейся на рассмотрении международной патентной заявке № РСТ/ЕР 2019/073119.
Процессор аппарата согласно настоящему изобретению выполнен с возможностью реализации метода идентификации, раскрытого в международной патентной заявке № РСТ/ЕР 2019/073119, для детектирования насекомых. Было установлено, что детектирование по траектории можно, в частности, использовать для детектирования насекомых в больших объемах детектирования перед распределяющим инсектициды транспортным средством. В частности, было установлено, что детектирование по траектории можно использовать в системе, где используют несколько методов детектирования в качестве соответствующих признаков для разных типов насекомых и выполненных с возможностью идентификации детектированных насекомых по классификатору, вводными данными для которого служат несколько признаков. Например, детектирование по траектории можно комбинировать с одним или несколькими из раскрытых ниже методов детектирования.
В некоторых вариантах осуществления указанные один или несколько детекторов содержат один или несколько фотодиодов. Единичные фотодиоды, принимающие свет из всего объема детектирования или из части объема детектирования, обеспечивают возможность быстрого детектирования, с временным разрешением, изменений яркости обратно-рассеянного света. По этим сигналам можно определять частоту взмахов крыльев летающих насекомых, по которой, в свою очередь, можно детектировать присутствие насекомых и, опционально, отличать друг от друга насекомых разных типов по характеристикам рисунков взмахов крыльев, например, по амплитудам кратных частот в частотном спектре, соответствующем событию детектирования насекомых.
В некоторых вариантах осуществления детекторный модуль содержит матрицу фотодиодов, например, линейную матрицу или двухмерную матрицу. Детекторный модуль может быть выполнен с возможностью направления света из разных подобъемов объема детектирования на соответствующие фотодиоды матрицы, тем самым обеспечивая возможность детектирования, с пространственным разрешением, насекомых с помощью фотодиодов.
В некоторых вариантах осуществления фотодиод или матрица фотодиодов выполнены с возможностью выборочного детектирования света с предварительно заданной длиной волны или длинами волн в малом диапазоне. В некоторых вариантах осуществления детекторный модуль выполнен с возможностью выборочного детектирования света с двумя или более длинами волн или длинами волн в двух или более малых диапазонах, причем указанные две или более длины волн или два или более диапазона отстоят друг от друга и не перекрывают друг друга. Для этого детекторный модуль может содержать один или несколько фотодиодов или матриц фотодиодов, выполненных с возможностью выборочного детектирования света с двумя или более длинами волн или длинами волн в двух или более малых диапазонах, причем указанные две или более длины волн или два или более диапазона отстоят друг от друга и не перекрывают друг друга. Это можно обеспечить, например, за счет единственной матрицы фотодиодов, в которой соответствующие полосно-пропускающие фильтры выборочно и попеременно располагают перед фотодиодом или матрицей фотодиодов. В качестве альтернативы, детектор может включать в себя два или более фотодиодов или матриц фотодиодов, каждый из которых выполнен с возможностью детектирования света с соответствующей длиной волны или длинами волн в соответствующем диапазоне. В частности, было установлено, что детекторный модуль с возможностью выборочного детектирования света на длинах волн 808 нм и 970 нм, соответственно, (например, посредством соответствующих фотодиодов) пригоден для детектирования и отличения друг от друга разных типов насекомых, например, по отношению обратно-рассеянного света с соответствующими длинами волн. В общем случае, в некоторых вариантах осуществления в число указанных одного или нескольких фотодиодов входят по меньшей мере первый фотодиод, выполненный с возможностью выборочного детектирования света в первом диапазоне длин волн; и по меньшей мере второй фотодиод, выполненный с возможностью выборочного детектирования света во втором диапазоне длин волн, не перекрывающем первый диапазон длин волн.
В общем случае, детекторный модуль может включать в себя единственный детектор или несколько детекторов. Соответственно, датчик насекомых может содержать процессор, выполненный с возможностью определения, на основе сигналов от одного или нескольких детекторов, количества, например, числа, насекомых, детектированных в объеме детектирования. В некоторых вариантах осуществления процессор выполнен с возможностью идентификации, на основе сигналов от одного или нескольких детекторов, одного или нескольких типов насекомых и определения соответствующих количеств насекомых указанных одного или нескольких типов, детектированных в объеме детектирования. Соответственно, система управления распределением может управлять распределением инсектицидов для выбора в качестве цели насекомых определенных типов. Кроме того, система управления распределением может управлять количеством распределяемого инсектицида в зависимости от количества детектированных насекомых или от конкретного типа насекомых.
Для этого процессор может обрабатывать сигналы детектора с возможностью детектирования одного или нескольких признаков, свидетельствующих о присутствии одного или нескольких насекомых в объеме детектирования, и подсчета числа насекомых, детектированных, например, за заданный период времени, в скользящем интервале или т.п., для определения оценки количества насекомых, детектированных в объеме детектирования, например, в виде числа насекомых, детектированных в объеме детектирования, например, на единицу времени и/или единицу объема. Процессор может быть даже выполнен с возможностью детектирования одного или нескольких признаков, указывающих тип детектированных насекомых, и выборочно определять оценку количества детектированных насекомых одного или нескольких типов, например, насекомых одного или нескольких видов, насекомых, реагирующих на конкретные типы инсектицидов и т.п. Для этого процессор выполнен с возможностью реализации подходящей классификационной модели, например на основе нейросетей и/или иных методов классификации, выполненной с возможностью определения присутствия детектируемого насекомого и/или идентификации детектированного насекомого по набору признаков. В общем случае, процессор может выдавать данные датчика, указывающие число насекомых, детектированных за период выборки в движущемся объеме детектирования, или иной параметр, указывающий оценку локальной популяции насекомых в объеме детектирования и/или в объеме выборки, пересекаемом объемом детектирования.
В некоторых вариантах осуществления процессор выполнен с возможностью идентификации одного или нескольких типов насекомых по одному или нескольким признакам, выбранным из следующих:
- детектированная траектория движения насекомого внутри объема детектирования;
- детектированная скорость движения насекомого внутри объема детектирования;
- одна или несколько детектированных частот взмахов крыльев;
- степень меланизации;
- степень блеска насекомых.
Детектирование и/или идентификация насекомых по частотам взмахов крыльев, степеням меланизации и блеска насекомых подробнее раскрыты в документе WO 2018/182440 и работе Gebru et al.: «Multiband modulation spectroscopy for the determination of sex and species of mosquitoes in flight», J. Biophotonics, 2018 (Гебру с соавторами «Спектроскопия с многополосной модуляцией для определения пола и видов комаров в полете», журнал «Биофотоника», 2018). В вышеуказанных документах речь идет об этих признаках применительно к лидарной системе, в которой используется принцип Шаймпфлюга; однако авторы настоящего изобретения установили, что указанные методы также можно применить к системе детектирования на основе других источников света, освещающих обширный объем, в отличие от узкого лазерного пучка.
Таким образом, аппарат обрабатывает сигналы датчика для вычисления данных датчика, указывающих количество насекомых, детектированных в движущемся объеме детектирования. Количество детектированных насекомых может служить в качестве оценки локальной популяции насекомых в объеме выборки, пересекаемом объемом детектирования за период измерения. В зависимости от результата детектирования насекомых и/или полученной на его основе оценки популяции насекомых и/или популяций насекомых соответствующих типов, система управления распределением может выбрать один или несколько подходящих инсектицидов, соответствующие количества, подлежащие применению в конкретном месте, и управлять выходными отверстиями системы для распределения на него выбранного количества. Для этого процессор, определяющий количество детектированных насекомых и/или оценивающий популяцию насекомых, может передавать данные датчика, указывающие определенное количество насекомых, детектированных в объеме детектирования, и/или иным образом указывающие оценку локальной популяции насекомых, в систему управления распределением. В некоторых вариантах осуществления система управления распределением и процессор датчика насекомых могут быть выполнены в виде единого процессорного модуля, т.е. процессор для обработки сигналов датчика для детектирования и, опционально, идентификации насекомых может входить в состав системы управления распределением.
По мере движения транспортного средства по участку земли, происходит движение объема детектирования вместе с транспортным средством, при этом датчик насекомых непрерывно или по меньшей мере неоднократно обновляет оценки популяции насекомых перед транспортным средством. Таким образом, система управления распределением может управлять распределением инсектицида (например, количеством и/или типом) в зависимости от текущей оценки популяции насекомых, например, в зависимости от локальной популяции насекомых.
В некоторых вариантах осуществления датчик насекомых смонтирован на транспортном средстве, отдельном от транспортного средства, распределяющего инсектицид. Например, датчик насекомых может быть смонтирован на беспилотном летательном аппарате, движущемся перед транспортным средством. В других вариантах осуществления датчик насекомых смонтирован на транспортном средстве, распределяющем инсектицид, что упрощает систему и ее использование. Датчик насекомых может быть смонтирован на штанге, раме, кронштейне или иной монтажной конструкции, смонтированной на обращенном вперед конце или вблизи обращенного вперед конца транспортного средства. В некоторых вариантах осуществления монтажная конструкция смонтирована с возможностью регулирования на транспортном средстве, например, с возможностью коррекции вертикального расстояния от датчика насекомых до земли с учетом, например, высоты растительности и/или типов подлежащих детектированию насекомых. Аналогичным образом, ориентацию датчика насекомых относительно направления движения вперед транспортного средства можно регулировать для регулирования местоположения объема детектирования относительно транспортного средства. Например, в некоторых ситуациях может быть желательно, чтобы датчик был расположен низко, но его поле обзора было обращено вперед или вверх и вперед, а в других ситуациях предпочтительным может быть высокое расположение с обращенным вперед или вниз и вперед полем обзора. Регулирование положения и/или ориентации датчика можно осуществлять вручную или автоматически.
Если датчик преимущественно обращен вперед, т.е. объем детектирования расположен перед транспортным средством вдоль пути движения, объем детектирования меньше подвержен возмущающим влияниям, создаваемым едущим транспортным средством, например, влияниям пыли, выхлопных газов или т.п. Система также может обрабатывать данные датчика из объема детектирования в первом месте вдоль пути движения в течение времени, нужного для достижения транспортным средством первого места, для обеспечения возможности коррекции управления распределением инсектицида с учетом особенностей первого места на основе данных, полученных в указанном первом месте.
Настоящее раскрытие относится к различным аспектам, в том числе к раскрытому выше и далее аппарату, относящимся к нему устройствам, системам, способам и/или изделиям, каждое из которых обеспечивает один или несколько эффектов и преимуществ, описанных в связи с одним или несколькими другими аспектами, и имеет один или несколько вариантов осуществления, соответствующих вариантам осуществления, раскрытым в связи с одним или несколькими другими аспектами и/или раскрытыми в прилагаемой формуле изобретения.
В частности, согласно одному аспекту, настоящее раскрытие относится к датчику насекомых.
Датчик насекомых может быть выполнен с возможностью монтажа на транспортном средстве, при этом транспортное средство выполнено с возможностью движения по пути движения по участку земли, при этом направление движения задано транспортным средством, при этом транспортное средство содержит устройство распределения инсектицида, выполненное с возможностью распределения инсектицида вдоль указанного пути движения во время движения транспортного средства по пути движения; при этом датчик насекомых выполнен с возможностью, будучи смонтирован на транспортном средстве, детектирования насекомых в объеме детектирования; причем объем детектирования расположен перед транспортным средством по направлению движения; при этом датчик насекомых выполнен с возможностью выдачи данных датчика в систему управления распределением, причем система управления распределением выполнена с возможностью приема данных датчика от датчика насекомых, при этом данные датчика указывают результат детектирования насекомых в объеме детектирования, и управления количеством распределяемого инсектицида в зависимости от принятых данных датчика.
В частности, согласно одному аспекту, раскрыты варианты осуществления датчика насекомых для детектирования находящихся в воздухе насекомых, движущихся над поверхностью грунта, при этом датчик насекомых содержит:
- осветительный модуль, выполненный с возможностью освещения объема детектирования, при этом объем детектирования приподнят над поверхностью грунта на минимальное вертикальное расстояние, и
- один или несколько детекторов, выполненных с возможностью детектирования света из объема детектирования;
причем осветительный модуль выполнен с возможностью испускания расходящегося пучка света, в частности с углом расходимости по меньшей мере в одном направлении величиной от 2° до 45°, например от 10° до 30°.
Раскрытые в настоящем документе варианты осуществления датчика насекомых являются прочными и несложными, что обеспечивает их экономичность, долговечность и пригодность для размещения на движущихся транспортных средствах. Кроме того, раскрытые в настоящем документе варианты осуществления датчика насекомых обеспечивают достоверное детектирование и классификацию движущихся в воздухе насекомых.
Следует понимать, что насекомые значительно отличаются друг от друга по размеру и поведению. Размеры насекомых могут составлять от менее одного миллиметра до нескольких сантиметров, а траектории движения насекомых различаются от парения в воздухе на одном месте до прыжков по баллистическим траекториям. Было установлено, что раскрытые в настоящем документе варианты осуществления аппарата и датчика насекомых применимы в отношении различных типов находящихся в воздухе насекомых, в том числе - летающих насекомых с крыльями и прыгающих насекомых, например, прыгающих листоедов, например, рапсовых блошек (psylliodes chrysocephala).
Если прыгающая блошка прыгает на высоту h, то вертикальную скорость, с которой блошка покидает землю, чтобы достигнуть указанной высоты, можно оценить, приняв траекторию полета по существу баллистической. Например, если блошка прыгает на 0,5 м над землей, то начальная вертикальная скорость блошки составит порядка 3,2 м/с, что отражает порядок величин скорости движения насекомых в объеме с баллистической траекторией. Чтобы зафиксировать такое быстрое событие с участием насекомых размером менее 5-10 мм, необходимо обеспечить протяженность объема детектирования и, следовательно, освещаемого объема с учетом необходимости покрытия существенной части траектории и скорость детектирования для разложения движения по времени. Кроме того, детекторный модуль должен обеспечить разложение таких событий во времени и пространстве. Аналогичным образом, как раскрыто в настоящем документе, для детектирования летающих насекомых по рисункам взмахов крыльев необходимо обеспечить соответствие аналогичным требованиям к объему детектирования и временной и пространственной разрешающей способности датчика насекомых.
В некоторых вариантах осуществления датчик насекомых и система управления распределением выполнены в едином блоке с возможностью монтажа на транспортном средстве и с возможностью осуществления связи с расположенным на данном транспортном средстве распределяющим устройством для управления распределением инсектицида из распределяющего устройства.
Здесь и далее, значение термина «процессор» следует толковать как включающее в себя любую схему и/или устройство, выполненное с возможностью осуществления раскрытых в настоящем документе функций. В частности, значение термина «процессор» включает в себя программируемый микропроцессор общего или специального назначения, например, центральный процессор (ЦП) компьютера или иной системы обработки данных, процессор цифровой обработки сигналов (ПЦОС), специализированную интегральную схему (СИС), программируемую логическую матрицу (ПЛМ), программируемую пользователем вентильную матрицу (ППВМ), электронную схему специального назначения и т.п. или их комбинацию. Следует понимать, что процессор и/или система управления распределением могут быть реализованы в виде клиент-серверной или аналогичной распределенной системы, в которой обнаружение сигналов и, опционально, некоторые действия по их обработке осуществляют на месте в транспортном средстве, а другие части обработки данных и классификационные задачи может выполнять удаленная хост-система, осуществляющая обмен данными с устройством-клиентом.
Согласно другому аспекту, раскрыты варианты осуществления способа управления инсектицидным опрыскиванием, включающего в себя этапы, на которых:
- детектируют находящихся в воздухе насекомых, движущихся в объеме детектирования, при этом объем детектирования расположен перед движущимся транспортным средством, при этом объем детектирования приподнят над поверхностью грунта на минимальное вертикальное расстояние;
- управляют распределением инсектицидов из указанного движущегося транспортного средства в зависимости от результата детектирования находящихся в воздухе насекомых.
Согласно другому аспекту, раскрыты варианты осуществления аппарата управления инсектицидным опрыскиванием, содержащего раскрытый выше и далее датчик насекомых и систему управления, например основанную на компьютере систему управления, выполненную с возможностью выдачи управляющего сигнала для управления дозатором инсектицида в зависимости от сигнала детектирования отдатчика насекомых.
Дополнительные признаки и преимущества станут ясны из нижеследующего раздела «Осуществление изобретения», в которых раскрыты варианты осуществления на примерах прилагаемых чертежей.
Краткое описание чертежей
Предпочтительные варианты осуществления будут подробнее раскрыты на примерах прилагаемых чертежей, из которых:
ФИГ. 1 изображает схематический вид аппарата для инсектицидного опрыскивания.
ФИГ. 2 схематически иллюстрирует работу аппарата для инсектицидного опрыскивания.
ФИГ. 3 схематически иллюстрирует вариант осуществления датчика насекомых.
ФИГ. 4 схематически иллюстрирует пример детекторного модуля датчика насекомых.
ФИГ. 5 схематически иллюстрирует другой пример детекторного модуля датчика насекомых.
ФИГ. 6 схематически иллюстрирует другой вариант осуществления датчика насекомых.
ФИГ. 7 схематически иллюстрирует пример сигнала датчика от детекторного модуля по раскрытому в настоящем документе варианту осуществления датчика насекомых.
ФИГ. 8 и 9 иллюстрируют примеры объемов детектирования.
Осуществление изобретения
ФИГ. 1 схематически изображает вид сверху аппарата для инсектицидного опрыскивания. Аппарат включает в себя сельскохозяйственное транспортное средство 100, например трактор или иное наземное транспортное средство. Следует понимать, что, в качестве альтернативы, возможно использование летательного аппарата.
Транспортное средство выполнено с возможностью движения по пути движения через поле или по иной поверхности грунта участка земли, подлежащего дезинсекции. Транспортное средство задает направление движения, как показано стрелкой 101. Направление движения далее также именуется «направление движения вперед относительно транспортного средства».
Транспортное средство содержит распределяющее инсектицид устройство 110, содержащее один или несколько выходных отверстий для распределения инсектицида. Например, распределяющее устройство 110 может содержать штангу, проходящую в поперечном направлении, т.е. поперек направления 101 движения.
Множество опрыскивающих сопел расположено на штанге, например, распределено по длине штанги. Распределяющее устройство может быть расположено у задней стороны или по направлению к задней стороне транспортного средства, хотя возможны и другие положения. Транспортное средство дополнительно содержит блок 140 управления распределением, например, подходящую схему управления, например, соответствующим образом запрограммированный микропроцессор или т.п. Блок управления распределением функционально связан с распределяющим устройством и выполнен с возможностью управления количеством инсектицида, распределяемого распределяющим устройством 110. Для этого устройство управления распределением может быть выполнено с возможностью управления клапаном или аналогичным устройством регулирования расхода для регулирования расхода потока инсектицида из бака инсектицида (явным образом не показан) в выходные отверстия распределяющего устройства. В некоторых вариантах осуществления блок 140 управления распределением может управлять несколькими клапанами для регулирования расхода потока инсектицида в соответствующие отдельные выходные отверстия. В некоторых вариантах осуществления транспортное средство может содержать несколько баков инсектицидов, например, для вмещения разных типов инсектицидов. В таком варианте осуществления блок управления распределением может быть выполнен с возможностью выборочного регулирования расхода потока инсектицидов из соответствующих баков в распределяющее устройство, например, для выбора типа инсектицида или комбинации инсектицидов, подлежащих распределению. Блок управления распределением может управлять распределением инсектицидов в режиме реального времени, т.е. изменять количество и/или тип подлежащего распределению инсектицида во время движения транспортного средства по пути движения. Соответственно, блок управления распределением может запускать распределение разных количеств и/или типов инсектицида в разных местах вдоль пути движения.
Аппарат дополнительно содержит датчик 120 насекомых для детектирования насекомых перед транспортным средством 100 во время движения транспортного средства в направлении 101 движения. Для этого датчик насекомых может быть смонтирован у или вблизи переднего конца транспортного средства.
В качестве альтернативы, датчик насекомых может быть смонтирован в другом месте на транспортном средстве или даже на отдельном транспортном средстве, например, на беспилотном летательном аппарате или беспилотном наземном транспортном средстве, движущемся впереди транспортного средства 100, рядом с ним или над ним.
Датчик 120 насекомых в варианте осуществления на ФИГ. 1 содержит штангу или раму 133, смонтированную у переднего конца транспортного средства. Датчик насекомых дополнительно содержит осветительный модуль 131 и детекторный модуль 130, каждый из которых смонтирован на штанге или раме 133. Следует понимать, что другие варианты осуществления могут включать в себя более одного осветительного модуля и/или более одного детекторного модуля. Также следует понимать, что осветительный модуль и детекторный модуль могут быть выполнены в виде отдельных устройств, т.е. каждый из модулей может иметь собственный кожух. В других вариантах осуществления осветительный модуль и детекторный модуль могут быть помещены в единый кожух или иным образом образовывать единый блок. В других вариантах осуществления датчик насекомых может быть смонтирован на транспортном средстве иным образом, например, без штанги или рамы.
Осветительный модуль 131 содержит источник света, например, одну или несколько галогенных ламп, один или несколько СИД и т.п., выполненных с возможностью освещения освещаемого объема перед транспортным средством. Осветительный модуль может быть соединен с возможностью связи с блоком 140 управления распределением для обеспечения возможности управления блоком управления распределением работой осветительного модуля. Детекторный модуль 130 содержит один или несколько детекторов и один или несколько оптических элементов, выполненных с возможностью приема обратно-рассеянного света по меньшей мере из части освещаемого объема и направления принятого света на один или несколько детекторов. Освещаемый объем, свет из которого принимает детекторный модуль для детектирования насекомых, именуется «объем 150 детектирования». Детекторный модуль 130 соединен с возможностью связи с блоком 140 управления распределением и направляет сигналы детектора, опционально обработанные сигналы детектора, в блок управления распределением. Блок управления распределением обрабатывает принятые сигналы детектора с возможностью детектирования насекомых в объеме детектирования. В зависимости от результатов детектирования насекомых, блок 140 управления распределением управляет работой распределяющего устройства с возможностью запуска распределения инсектицида распределяющим устройством в зависимости от результатов детектирования насекомых в объеме детектирования. В некоторых вариантах осуществления блок управления распределением может управлять распределяющим устройством таким образом, чтобы оно распределяло инсектицид тогда, когда распределяющее устройство достигнет места в объеме детектирования, в отношении которого было принято решение о распределении. В качестве альтернативы, датчик насекомых содержит процессор, выполненный с возможностью осуществления детектирования насекомых и направления информации о детектированной популяции насекомых в систему управления распределением.
Таким образом, по мере движения транспортного средства по пути движения, детекторный модуль принимает свет из объема детектирования перед транспортным средством, т.е. происходит движение объема детектирования по пути движения перед транспортным средством. Поэтому блок управления распределением может непрерывно (или по меньшей мере периодически) управлять распределяющим устройством для регулирования распределения инсектицида в зависимости от текущего (или наиболее позднего) результата детектирования насекомых перед транспортным средством. Следует понимать, что регулирование можно осуществлять с отсрочкой, учитывающей отставание движения распределяющего устройства от движения объема детектирования вдоль пути движения, а также время ожидания анализа сигналов детектора. В других вариантах осуществления управление распределяющим устройством может происходить после того, как транспортное средство уже прошло объем детектирования, на основе которого осуществляют управление. При этом авторы настоящего изобретения установили, что указанная отсрочка является приемлемой и обеспечивает возможность достаточно точной коррекции распределения инсектицидов.
ФИГ. 2 схематически иллюстрирует работу аппарата для инсектицидного опрыскивания. В частности, ФИГ. 2 иллюстрирует критерии выбора размера и формы объема детектирования.
ФИГ. 2 изображает датчик 120 насекомых и распределяющее устройство 110 транспортного средства на ФИГ. 1. Движение датчика насекомых и распределяющего устройства происходит по направлению 101 движения, причем датчик насекомых движется впереди распределяющего устройства. Датчик насекомых обращен вперед и отслеживает объем 150 детектирования, также движущееся по направлению 101 движения впереди детектора насекомых.
На ФИГ. 2 объем детектирования изображен в виде коробчатого объема высотой Н, шириной W и глубиной D. При этом следует понимать, что форма объема детектирования может быть отлична от коробчатой. Предпочтительные варианты осуществления объема детектирования будут раскрыты ниже на примерах ФИГ. 8 и 9. В общем случае, форма и размер объема детектирования, а также его положение относительно транспортного средства, зависят от осветительного модуля и детекторного модуля датчика насекомых. В общем случае, объем детектирования можно определить как объем, из которого модуль детектирования получает сигналы датчика, по которым можно детектировать насекомых. Объем детектирования обычно образован областью перекрытия объема, освещаемого осветительным модулем, и объема, зависящего от поля обзора и глубины поля детекторного модуля.
Детектирование насекомых можно осуществлять по сигналам, зарегистрированным за период t выборки. В общем случае, если датчик насекомых выполнен с возможностью движения относительно поверхности грунта, например, благодаря тому, что датчик насекомых смонтирован на движущемся транспортном средстве, происходит движение объема детектирования относительно поверхности грунта. Соответственно, если данные датчика указывают результат детектирования насекомых в объеме детектирования за период времени t, то данные датчика указывают результат детектирования насекомых в объеме, пересекаемом перемещающимся объемом детектирования за время t. Здесь и далее, объем, пересекаемый перемещающимся объемом детектирования за период t выборки, также именуется «объем выборки». Соответственно, данные датчика, указывающие результат детектирования насекомых в объеме детектирования, могут представлять собой оценку локальной популяции насекомых в объеме выборки над поверхностью грунта, при этом объем детектирования пересекает объем выборки во время движения объема детектирования относительно поверхности грунта за период t выборки. Например, если движение транспортного средства происходит с постоянной скоростью v по поверхности грунта, то общий объем выборки за период t выборки составляет Vвыборки = V0 + A*v*t, где V0 - объем детектирования (в приведенном выше примере V0 = H*w*D), а А - площадь поперечного сечения объема выборки в направлении движения (в приведенном выше примере А = W*H).
Авторы настоящего изобретения установили, что для принятия решения о том, осуществлять ли инсектицидное опрыскивание или нет, предпочтительно выполнить локальную выборку по меньшей мере в объеме выборки величиной 1 м3 для получения результата, дающего представление о популяции насекомых.
Если скорость движения транспортного средства составляет 20 км/ч, расстояние от датчика насекомых до объема детектирования составляет 6 м, коробчатый объем детектирования имеет высоту Н = 1 м, ширину W = 1 м и глубину D = 0,6 м, объем детектирования составляет V0 = 0,6 м3, то для осуществления выборки в объеме выборки V = 1 м3 нужно время t = 0,1 секунды. При этом для получения более точных результатов детектирования может быть предпочтительно, чтобы размеры объема детектирования были больше. Соответственно, было установлено, что, с учетом типовых скоростей сельскохозяйственных транспортных средств, подходящими являются объемы детектирования размером по меньшей мере 0,2 м3, например, по меньшей мере 0,5 м3, например по меньшей мере 1 м3, например по меньшей мере 2 м3.
Другой критерий относится к форме объема детектирования. Для достоверного детектирования и идентификации насекомого (например, для определения частоты взмахов крыльев насекомого), предпочтительно, чтобы оно пребывало в объеме детектирования в течение по меньшей мере 0,1 секунды. Для того, чтобы насекомые пребывали в объеме детектирования как можно дольше независимо от направления движения насекомого (и независимо от движения объема детектирования по направлению движения), желательно, чтобы линейные размеры объема детектирования были сопоставимыми по всем направлениям. При этом, на практике было установлено, что подходящие отношения наибольшего размера объема детектирования к наименьшему размеру объема детектирования составляют не более 10:1, предпочтительно не более 5:1, предпочтительно не более 3:1, более предпочтительно не более 2:1.
Еще один критерий относится к положению объема 150 детектирования относительно транспортного средства и относительно земли. В некоторых вариантах осуществления может быть выбран объем детектирования, расположенный на достаточном удалении перед транспортным средством для обеспечения возможности осуществления блоком управления распределением (или иным процессором) обработки данных, необходимой для получения результата детектирования, в пределах времени, в течение которого распределяющее устройство проходит расстояние между распределяющим устройством и объемом детектирования. При этом желательно, чтобы объем детектирования был расположен достаточно близко к транспортному средству для того, чтобы результат детектирования популяции насекомых гарантированно точно указывал популяцию насекомых в каком-либо месте на момент, когда распределяющее устройство прибудет в это место. Если объем детектирования будет слишком удален от распределяющего устройства, может произойти значительное изменение популяции насекомых к моменту, когда распределяющее устройство пройдет расстояние от распределяющего устройства до объема детектирования.
Предпочтительное вертикальное расстояние, на которое объем детектирования приподнят над поверхностью грунта, и/или высота объема детектирования может зависеть от типа посевов/растительности и типа подлежащих детектированию насекомых. Для находящихся в воздухе насекомых и оптических датчиков насекомых, объем детектирования предпочтительно расположен над плоскостью отсчета, наиболее предпочтительно - непосредственно над ней. Плоскость отсчета может быть образована, например, растительным покровом участка земли или иной горизонтальной плоскостью, отстоящей от поверхности грунта на вертикальное расстояние.
Далее будут раскрыты варианты осуществления датчика насекомых, который может быть смонтирован на сельскохозяйственном транспортном средстве, например, том, о котором шла речь в примере на ФИГ. 1, или может быть размещен иным образом, например, неподвижно или с возможностью перемещения.
ФИГ. 3 схематически иллюстрирует вариант осуществления датчика насекомых. Датчик насекомых содержит обращенный вперед модуль 130 детектирования и осветительный модуль 131. В данном примере осветительный модуль сформирован в виде двух продолговатых матриц СИД. Каждая из матриц проходит в боковом направлении от каждой стороны детекторного модуля. Матрицы создают освещаемый объем 151, освещаемый обеими матрицами. Детекторный модуль содержит систему формирования изображений, выполненную с возможностью проецирования плоскости 152 объекта внутри освещаемого объема по меньшей мере на одну плоскость изображения детекторного модуля. Поле обзора системы формирования изображений и глубину поля 153 системы формирования изображений настраивают с возможностью проецирования системой формирования изображений по меньшей мере части освещаемого объема на плоскость изображения детекторного модуля. Часть освещаемого объема, проецируемая системой формирования изображений с возможностью ее детектирования одним или несколькими детекторами детекторного модуля и использования для детектирования насекомых, образует объем 150 детектирования.
Например, детекторный модуль может включать в себя датчик изображения, например, датчик на основе приборов с зарядовой связью (ПЗС) или комплементарной структуры «металл - оксид - проводник» (КМОП), для обеспечения возможности формирования изображений насекомых в освещаемом объеме. Было установлено, что формирование изображений насекомых в объеме детектирования позволяет идентифицировать насекомых по траекториям насекомых, движущихся в объеме детектирования, т.е. в пределах глубины поля системы формирования изображений. Это позволяет детектировать и идентифицировать даже тех насекомых, которых трудно или невозможно детектировать и идентифицировать по частотам взмахов крыльев. Примером такого насекомого служит прыгающая рапсовая блошка.
Например, система формирования изображений на основе линзы съемочной камеры с фокусным расстоянием f = 24 мм и диафрагменным числом f/2,8 и ¾-дюймового датчика изображения, выполненная с возможностью фокусирования на плоскость объекта на расстоянии 2 м от линзы, имеет поле обзора приблизительно 1,7 м × 1,7 м и глубину поля приблизительно 1,3 м, в результате чего возникает объем детектирования приблизительно 3,7 м3.
Следует понимать, что возможно использование иных систем формирования изображений. Также возможно использование дополнительных и альтернативных детекторов.
Также следует понимать, что осветительный модуль может быть размещен иным образом относительно детекторного модуля и/или может включать в себя источники света другого типа и/или в другом количестве.
В общем случае, для того, чтобы количество обратно-рассеянного света от насекомых внутри объема детектирования было максимальным, осветительный модуль может предпочтительно примыкать к детекторному модулю или иным образом быть расположен вблизи него так, чтобы угол, образуемый между собой направлением освещения и направлением наблюдения, был относительно малым, например менее 30°, например менее 20°. В некоторых вариантах осуществления осветительный модуль выполнен с возможностью испускания пучка света в направлении освещения, при этом детекторный модуль образует направление наблюдения, например, в виде оптической оси детекторного модуля, причем направление освещения и направление наблюдения образуют между собой угол, при этом угол составляет от 1° до 30°, например, от 5° до 20°.
ФИГ. 4 схематически иллюстрирует пример детекторного модуля датчика насекомых. Детекторный модуль содержит датчик 411 изображения и две матрицы 405 и 409 фотодиодов, соответственно. Датчик 411 изображения регистрирует изображение объема 150 детектирования, как раскрыто выше. Для этого детекторный модуль содержит линзы 401, 403 и 410 для проецирования плоскости объекта в объеме детектирования на подходящей глубине поля на датчик изображения. В частности, линза 401 проецирует плоскость объекта на виртуальную плоскость 420 изображения. Линза 403 коллимирует свет от виртуальной плоскости изображения, а линза 410 фокусирует коллимированный свет на датчик изображения. Расщепитель 404 пучка направляет часть коллимированного света к другой линзе, фокусирующей свет на матрицу 405 фотодиодов.
Аналогичным образом, расщепитель 407 пучка направляет другую часть коллимированного света на линзу 408, фокусирующую свет на матрицу 409 фотодиодов. Расщепитель 404 пучка выполнен с возможностью выборочного направления света с первой длиной волны, например, 970 нм, на матрицу 405 фотодиодов, а расщепитель 407 пучка выполнен с возможностью выборочного направления света со второй, другой, длиной волны, например, 808 нм, на матрицу 409 фотодиодов.
Таким образом, фотодиоды каждой из матриц детектируют, с временным разрешением, обратно-рассеянный свет из соответствующих частей объема детектирования. В качестве альтернативы, вместо матриц фотодиодов возможно использование отдельных фотодиодов или датчиков изображения.
По полученным таким образом сигналам система может детектировать насекомых в соответствующих частях модуля детектирования по детектированной частоте взмахов крыльев, степени блеска и/или степени меланизации, например, как раскрыто в WO 2018/182440.
Аналогичным образом, на основе изображений, зарегистрированных датчиком 411 изображения, система может определять дополнительные или альтернативные признаки, по которым можно определять присутствие насекомых и, опционально, идентифицировать их. Для этого способ может предусматривать использование подходящих методов машинного зрения, например, распознавания объекта и/или детектирования и распознавания траекторий движений насекомых, например, как раскрыто в также находящейся на рассмотрении международной патентной заявке № РСТ/ЕР 2019/073119.
В частности, было установлено, что комбинирование различных сигналов детектирования и, следовательно, различных типов признаков, обеспечивает возможность достоверного детектирования насекомых, в том числе - насекомых, которых трудно детектировать, например, только по частоте взмахов крыльев.
При этом следует понимать, что другие варианты осуществления детекторных модулей могут включать в себя только один из вышеуказанных детекторов или только некоторые из них, например, только датчик изображения, или только датчик изображения в комбинации с единственным фотодиодом или матрицей фотодиодов, или только комбинацию двух фотодиодов или матриц фотодиодов. Кроме того, в альтернативных вариантах осуществления фотодиоды или матрицы фотодиодов могут быть выполнены с возможностью выборочного детектирования света с альтернативными или дополнительными длинами волн.
Кроме того, несмотря на то, что в варианте осуществления на ФИГ. 4 использована комбинированная оптическая система с возможностью направления света на несколько чувствительных элементов, альтернативные детекторные модули могут содержать отдельные детекторы с собственной оптической системой каждый, например, как проиллюстрировано ниже на ФИГ. 5.
ФИГ. 5 схематически иллюстрирует другой пример детекторного модуля датчика насекомых. В частности, ФИГ. 5 иллюстрирует детекторный модуль, содержащий три детектора 130А-С, соответственно, каждый из которых принимает свет из одного и того же объема детектирования, освещаемого одним и тем же осветительным модулем (не показан). В других альтернативных вариантах осуществления детекторы выполнены с возможностью приема света из разных объемов детектирования, которые может освещать один и тот же осветительный модуль или соответствующие осветительные модули. Каждый из детекторов 130А-С включает в себя собственную оптическую систему, например, собственные линзы и т.п.
В данном примере детекторный модуль содержит детектор 130А для детектирования света с первой длиной волны и, опционально, в первом состоянии поляризации. Для этого детектор 130А может содержать подходящий полосно-пропускающий фильтр, например, фильтр, выборочно пропускающий свет с длиной волны 808 нм к чувствительному элементу детектора, например, фотодиоду или матрице фотодиодов. Детектор 130А может также содержать поляризационный фильтр.
Детектор 130В включает в себя цифровую съемочную камеру, например, раскрытую на примере ФИГ. 3 или 4.
Детектор 130С выполнен с возможностью детектирования света со второй длиной волны (отличной от первой длины волны и отстоящей от нее) и, опционально, во втором состоянии поляризации. Для этого детектор 130С может содержать подходящий полосно-пропускающий фильтр, например, фильтр, выборочно пропускающий свет с длиной волны 970 нм к чувствительному элементу детектора, например, фотодиоду или матрице фотодиодов. Детектор 130С может также содержать поляризационный фильтр.
Следует понимать, что альтернативные датчики насекомых могут содержать дополнительные или альтернативные детекторы, например, менее трех или более трех детекторов.
ФИГ. 6 схематически иллюстрирует другой вариант осуществления датчика насекомых. Датчик насекомых, обозначенный общим номером позиции 120, содержит обрабатывающий блок 140, детекторный модуль 130 и осветительный модуль 131, при этом все они размещены в пределах кожуха 110. В данном примере осветительный модуль и детекторный модуль соосны друг другу по вертикали, при этом осветительный модуль размещен под детекторным модулем. При этом возможны и другие компоновки.
Осветительный модуль содержит матрицу 161 светоизлучающих диодов (СИД) и соответствующую матрицу линз 161 для направления света от соответствующих СИД в виде расходящегося пучка 163 света в направлении 164 освещения. Матрица светоизлучающих диодов может содержать первый набор диодов, выполненных с возможностью выборочного испускания света в первом диапазоне длин волн, например 810 нм +/-25 нм. Матрица светоизлучающих диодов может также содержать второй набор диодов, выполненных с возможностью выборочного испускания света во втором диапазоне длин волн, отличном от первого диапазона длин волн, в частности отстоящего от первого диапазона длин волн, например 980 нм +/-25 нм. В других вариантах осуществления матрица светоизлучающих диодов может включать в себя СИД альтернативных или дополнительных типов. Например, в некоторых вариантах осуществления СИД могут быть выполнены с возможностью испускания света в широком диапазоне длин волн видимой области, ближней инфракрасной области и/или инфракрасной области.
Детекторный модуль 130 содержит оптическую систему 132 в виде линзы Френеля. Возможно использование альтернативной системы линз. Детекторный модуль 130 включает в себя светочувствительный элемент 133, например, один или несколько фотодиодов, например, матрицу фотодиодов, датчик изображения на основе ПЗС или КМОП, при этом оптическая система направляет свет из объема детектирования на светочувствительный элемент. В некоторых вариантах осуществления оптическая система проецирует плоскость 152 объекта внутри освещаемого объема на светочувствительный элемент. Поле обзора оптической системы и глубина поля оптической системы настроены так, чтобы оптическая система направляла свет из части освещаемого осветительным модулем объема на светочувствительный элемент. Часть освещаемого объема, из которой оптическая система принимает свет с возможностью его детектирования светочувствительным элементом и использования для детектирования насекомых, образует объем 150 детектирования. Оптическая система 132 образует оптическую ось 134, пересекающую направление 164 освещения под малым углом, например, 10°.
Например, если оптическая система, выполненная на основе линзы съемочной камеры с фокусным расстоянием f = 24 мм и диафрагменным числом f/2,8 и светочувствительного элемента, включает в себя ¾-дюймовый датчик изображения, детекторный модуль может быть выполнен с возможностью фокусирования на плоскости объекта на расстоянии 2 м от линзы, что соответствует полю обзора приблизительно 1,7 м × 1,7 м и глубине поля приблизительно 1,3 м, в результате чего возникает объем детектирования приблизительно 3,7 м3.
Детекторный модуль 130 соединен с возможностью связи с обрабатывающим блоком 140 и направляет полученное светочувствительным элементом излучение в обрабатывающий блок. Обрабатывающий блок 140 может включать в себя соответствующим образом запрограммированный компьютер или иное подходящее обрабатывающее устройство или систему. Обрабатывающий блок принимает сигнал датчика, например, изображение или поток изображений, и/или один или несколько временных рядов сигналов датчика от соответствующего одного или нескольких фотодиодов и, опционально, дополнительно принимает сигналы детекторов от детекторного модуля и обрабатывает принятые сигналы датчика с возможностью детектирования и идентификации насекомых в объеме детектирования, и выдает данные датчика, указывающие оценку популяции насекомых.
ФИГ. 7 схематически иллюстрирует пример сигнала датчика от детекторного модуля по раскрытому в настоящем документе варианту осуществления датчика насекомых, например, датчика насекомых, раскрытого на примере любой из предыдущих фигур. В данном примере сигнал датчика от детекторного модуля включает в себя соответствующий временной ряд детектированных интенсивностей света в двух узких диапазонах длин волн, например, зарегистрированных соответствующими фотодиодами, снабженными соответствующими полосно-пропускающими фильтрами. В некоторых вариантах осуществления возможно объединение или какое-либо иное комбинирование сигналов от нескольких фотодиодов, датчика изображения и/или т.п.
В данном примере временной ряд 701 соответствует детектированному свету с длиной волны 808 нм, а временной ряд 702 соответствует детектированному свету с длиной волны 975 нм. При этом в других вариантах осуществления возможно использование других длин волн, и/или более двух длин волн или диапазонов длин волн.
Обрабатывающий блок датчика насекомых может обрабатывать указанный временной ряд для детектирования присутствия насекомого в объеме детектирования и, опционально, определения типа детектированного насекомого. В качестве альтернативы, некоторые или все операции обработки сигналов и данных может выполнять система обработки данных за пределами датчика изображения.
В данном примере способ, реализуемый обрабатывающим блоком и/или внешней системой обработки данных, позволяет детектировать присутствие детектируемого излучения сверх заданного предела и/или определять основную гармонику детектированного частотного отклика с возможностью детектирования присутствия насекомого.
В качестве альтернативы или дополнения, указанный способ позволяет вычислять один или несколько признаков, по которым можно определять тип насекомого. В число примеров этих признаков входят основная частота взмахов крыльев (ЧВК, англ. wing beat frequency (WBF)), отношение длины тела к длине крыла (ОТК, англ. body-wing ratio (BWR)) и степень меланизации (МЕЛ, англ. melanisation (MEL)).
Например, способ позволяет вычислить основную частоту взмахов крыльев (ЧВК) по определенной, как указано выше, основной гармонике частотного отклика детектированного события детектирования. Способ позволяет вычислить отношение длины тела к длине крыла в виде среднего отношения сигнала крыла к сигналу тела. Сигнал тела можно определить как базовый сигнал 711 события детектирования, представляющий рассеяние от насекомого со сложенными крыльями, а сигнал крыла можно определить как уровни 712 сигнала у пиков при рассеянии.
Степень меланизации можно определить как среднее соотношение сил сигналов двух регистрируемых каналов во время события детектирования.
Способ позволяет определить, по одному или нескольким из вышеуказанных признаков, опционально в комбинации с другими параметрами, тип насекомого, например, вид насекомых. Определение можно осуществлять на основе подходящих таблиц соответствий, классификационной модели, например, модели машинного обучения, или т.п.
В число других примеров параметров, которые позволяют детектировать раскрытые в настоящем документе варианты осуществления датчика насекомых, пригодных для детектирования и/или классификации летающих или прыгающих насекомых, входят траектории движения насекомых, детектированных в объеме детектирования, например, как раскрыто в также находящейся на рассмотрении международной патентной заявке № РСТ/ЕР 2019/073119, содержание которой во всей полноте включено в настоящую заявку посредством ссылки.
В общем случае, в раскрытых в настоящем документе вариантах осуществления датчика насекомых объем детектирования является достаточно большим для того, чтобы детекторный модуль мог зафиксировать число насекомых, дающее представление о плотности популяции на участке, например, на участке, подлежащем пестицидной обработке. При этом объем детектирования достаточно мал для того, чтобы его можно было равномерно осветить для обеспечения высокой силы сигнала на датчике изображения.
Кроме того, периоды наблюдения в раскрытых в настоящем документе вариантах осуществления аппарата являются краткими, например, для того, чтобы обеспечить вводные данные, на основании которых может совершать действия система управления пестицидного опрыскивателя, движущегося по подлежащему обработке участку.
При этом периоды наблюдения в раскрытых в настоящем документе вариантах осуществления аппарата являются достаточно длительными для достоверной классификации летающих насекомых.
ФИГ. 8 и 9 иллюстрируют примеры объемов детектирования. ФИГ. 8 схематически изображает пример усеченно-конического объема детектирования, возникающего в результате испускания осветительным модулем расходящегося пучка света в целом круглого поперечного сечения. ФИГ. 9 схематически иллюстрирует пример усеченно-пирамидального объема детектирования.
Для принятия решения об опрыскивании предпочтительно, чтобы зарегистрированная активность насекомых позволяла получить представление о рассматриваемом участке. Для этого нужны достаточно высокие статистические значения подсчета. Авторы настоящего изобретения установили, что наблюдение по меньшей мере 10, предпочтительно по меньшей мере 50, более предпочтительно по меньшей мере 100 насекомых позволяет в достаточной степени получить представление об активности насекомых.
Авторы настоящего изобретения также установили, что типовые значения активности насекомых, наблюдаемых на соответствующих земельных участках, лежат в диапазоне от 0,2 до 2 насекомых в секунду на м3. В случае монтажа на движущемся транспортном средстве, происходит движение объема V детектирования вперед со скоростью v движения транспортного средства. Например, если объем детектирования датчика составляет порядка 3 м3, а активность насекомых составляет 1 насекомое на м3, потребуется 33 секунды, чтобы получить значение подсчета 100 насекомых. Если скорость движения транспортного средства составляет 20 км/ч, то за это время транспортное средство продвинется вперед приблизительно на 110 м. С учетом типовых длин штанг опрыскивателей и того, что размеры подлежащих обработке участков обычно могут превышать несколько десятков гектар, детектирование можно осуществлять с разрешением, достаточным для принятия решений об опрыскивании с учетом локальных особенностей соответствующих частей подлежащего обработке участка земли.
В некоторых из раскрытых в настоящем документе вариантов осуществления датчика насекомых регистрируют один или несколько временных рядов рассеяния света одним или несколькими насекомыми в полете с одной или несколькими длинами волн указанного света. По зарегистрированному временному ряду можно вычислить частоту взмахов крыльев и/или отношение рассеяний от тела и крыльев соответственно. При этом для получения достоверного и точного результата детектирования желательно, чтобы зарегистрированный временной ряд был достаточно длинным для совершения множества взмахов крыльев. Частота взмахов крыльев насекомых в полете составляет от приблизительно 100 Гц до приблизительно 1000 Гц. Для получения более 10 взмахов крыльев желательно, чтобы в худшем случае насекомое пребывало в объеме детектирования предпочтительно более 100 миллисекунд. Аналогичным образом, чтобы облегчить детектирование по зарегистрированным траекториям полета, периоды наблюдения должны быть достаточно длительными для регистрации траекторий достаточной длины.
Таким образом, в раскрытых в настоящем документе вариантах осуществления датчика насекомых используют объем детектирования, чья форма и размер обеспечивают достаточно длительные периоды наблюдения, даже если происходит движение датчика по участку земли.
Скорость движения обычного сельскохозяйственного транспортного средства по участку земли может составлять, например, 20 км/ч или около того. С такой скоростью, за 100 миллисекунд перемещение вперед транспортного средства и, следовательно, объема детектирования составит 0,55 м. Поэтому желательно, чтобы величина объема детектирования по направлению движения транспортного средства предпочтительно была больше 1 м, например больше 2 м, например больше 5 м, чтобы гарантировать высокую вероятность достаточно длительного пребывания насекомых внутри перемещающегося объема детектирования.
Например, длина объема детектирования по направлению движения может быть менее 100 м, например менее 50 м, например менее 20 м.
Кроме того, как сказано выше, предпочтительно, чтобы величина объема детектирования была не меньше приблизительно 1 м3, например больше 1 м3. Для создания такого объема детектирования посредством небольшого и экономичного датчика изображения, предпочтительно, чтобы осветительный модуль был тщательно сконфигурирован.
Освещаемые объемы детектирования на Фиг. 8 и 9 образуют большие объемы детектирования вблизи датчика изображения, т.е. с возможностью осуществления репрезентативных и локальных измерений.
Объемы детектирования на ФИГ. 8 и 9 представляют собой область перекрытия освещаемого объема, освещаемого осветительным модулем датчика насекомых, и детектируемого объема, из которого детектор датчика насекомых принимает свет, т.е. детектируемый объем может зависеть от поля обзора и глубины поля детектора. В одном варианте осуществления осветительный модуль содержит один или несколько подходящих источников света, например, один или несколько СИД высокой мощности, излучающих свет, расходящийся от осветительного модуля с возможностью распределения света в большой объем. В одном частном варианте осуществления осветительный модуль выполнен с возможностью испускания света с полным углом расходимости в горизонтальной плоскости больше 5°, например больше 10°, например больше 20°, при этом вертикальная расходимость ограничена углами менее 2°, например менее 5°. Данный вариант осуществления является предпочтительным, так как в результате возникает оптимальный объем детектирования непосредственно над посевами. Кроме того, в данном варианте осуществления количество света, исчезающего в восходящем направлении или в посевах, является ограниченным.
Также предпочтительно, чтобы осветительный модуль был выполнен с возможностью направления освещающего света вдоль центральной оптической оси излучаемого света (т.е. по направлению освещения), направленной вверх под таким углом, при котором исключено попадание света на посевы, например от 1° до 30°, например от 2° до 30°, например от 5° до 20°.
Пример объема детектирования, создаваемого таким расходящимся пучком освещения, имеющим форму сектора и направленным вперед и вверх, проиллюстрирован на ФИГ. 9. В частности, ФИГ. 9 изображает трехмерный вид объема 150 детектирования, а также вид сбоку и вид сверху объема детектирования. В примере на ФИГ. 9 расстояние d0 от апертурной диафрагмы детекторного модуля до начала объема детектирования составляет приблизительно 1 м. Расстояние от апертурной диафрагмы детекторного модуля до дальнего конца объема детектирования составляет приблизительно 10 м. Угол θвертикальн. расходимости расходящегося пучка света в вертикальном направлении (полный угол) составляет приблизительно 4°, а угол θгоризонтальн. расходимости в горизонтальном направлении (полный угол) составляет приблизительно 20°. При этом следует понимать, что в других вариантах осуществления размер и/или форма могут быть другими.
В общем случае, расположение объема детектирования вблизи датчика насекомых облегчает эффективное освещение объема детектирования и достоверное детектирование мелких насекомых. Оно также облегчает управление распределением в зависимости от результата детектирования локальных популяций насекомых. Например, граница объема детектирования, ближайшая к апертурной диафрагме детекторного модуля, может отстоять от апертурной диафрагмы детекторного модуля на расстояние от 10 см до 10 м, например от 10 см до 5 м, например от 10 см до 2 м. Наиболее удаленная от апертурной диафрагмы детекторного модуля граница объема детектирования может отстоять от апертурной диафрагмы детекторного модуля на расстояние от 3 м до 100 м, например от 5 м до 20 м, например от 8 м до 12 м.
Несмотря на то, что изобретение было раскрыто на примерах некоторых частных вариантов осуществления, специалистам в данной области техники будут очевидны разнообразные модификации без отступления от существа и объема настоящего изобретения, определенных прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ЛЕЧЕНИЯ КОЖИ НА ОСНОВЕ ЭНЕРГИИ | 2013 |
|
RU2623299C2 |
| ИЗМЕРЕНИЕ ТЕМПЕРАТУРЫ | 2014 |
|
RU2669547C2 |
| УСТРОЙСТВА ДЛЯ ОТПУГИВАНИЯ ИЛИ ИСТРЕБЛЕНИЯ ВРЕДИТЕЛЕЙ | 2016 |
|
RU2735537C2 |
| УСТРОЙСТВО И СПОСОБ ОПТИЧЕСКОГО ИССЛЕДОВАНИЯ ЦЕННЫХ ДОКУМЕНТОВ | 2007 |
|
RU2421817C2 |
| ДАТЧИК ПОДСЧЕТА ЯИЦ | 2007 |
|
RU2369902C2 |
| СПЕКТРАЛЬНЫЙ ДАТЧИК ДЛЯ ПРОВЕРКИ ЦЕННЫХ ДОКУМЕНТОВ | 2010 |
|
RU2552188C2 |
| СИСТЕМА ДЕТЕКТИРОВАНИЯ ФЛУОРЕСЦЕНЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ЗНАЧИМЫХ ПАРАМЕТРОВ РАСТИТЕЛЬНОСТИ | 1998 |
|
RU2199730C2 |
| УСОВЕРШЕНСТВОВАННАЯ ТЕМПЕРАТУРНАЯ КОМПЕНСАЦИЯ И СХЕМА УПРАВЛЕНИЯ ДЛЯ ОДНОФОТОННЫХ СЧЕТЧИКОВ | 2010 |
|
RU2518589C2 |
| УПРАВЛЕНИЕ ОСВЕЩЕНИЕМ НА ОСНОВЕ БЛИЗОСТИ | 2015 |
|
RU2707874C2 |
| НЕДОРОГОСТОЯЩАЯ КОНСТРУКЦИЯ ЦИФРОВОГО ПЭТ (ПОЗИТРОННОГО ЭМИССИОННОГО ТОМОГРАФА) | 2015 |
|
RU2705758C2 |


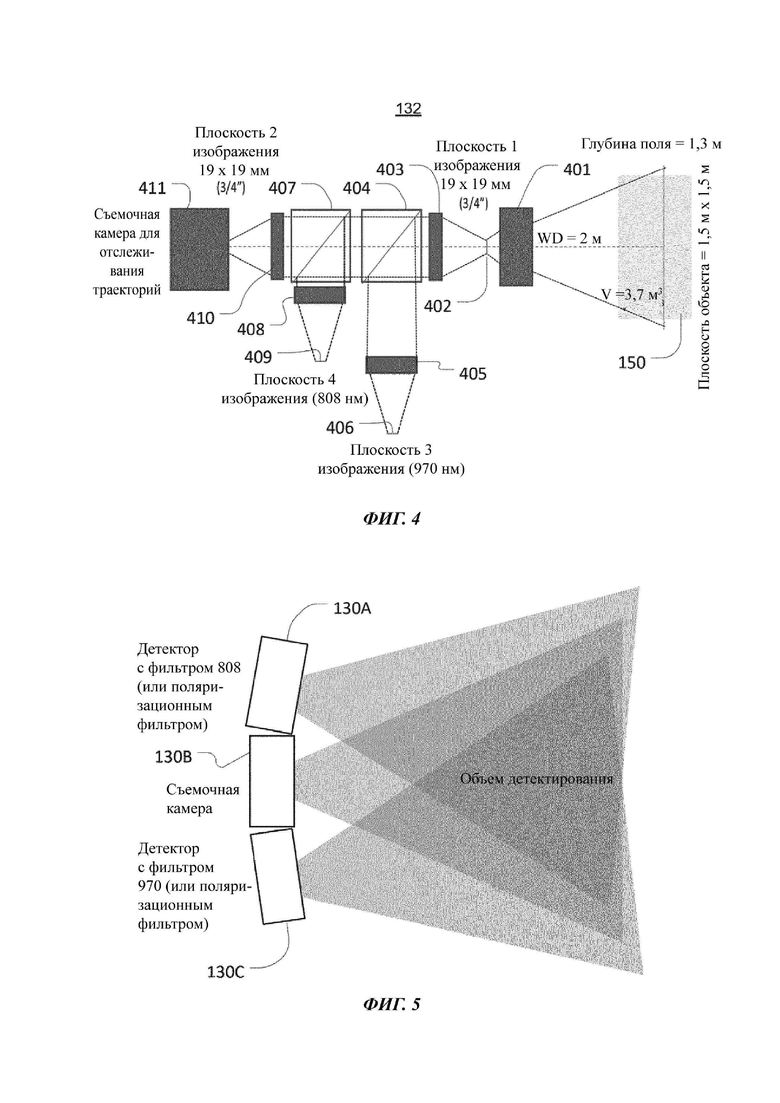

Изобретение относится к способу, аппарату и датчику для инсектицидного опрыскивания. Датчик насекомых для детектирования находящихся в воздухе насекомых, движущихся над поверхностью грунта, содержит осветительный модуль, выполненный с возможностью освещения объема детектирования, при этом объем детектирования приподнят над поверхностью грунта на минимальное вертикальное расстояние, и один или несколько детекторов, выполненных с возможностью детектирования света из объема детектирования. Осветительный модуль выполнен с возможностью испускания расходящегося пучка света, в частности с углом расходимости по меньшей мере в одном направлении величиной от 2° до 45°, например от 10° до 30°. Аппарат для распределения инсектицида по участку земли, при этом участок земли образует поверхность грунта, при этом аппарат включает в себя: транспортное средство, выполненное с возможностью движения по пути движения по поверхности грунта, при этом направление движения задано транспортным средством, при этом транспортное средство содержит устройство распределения инсектицида, выполненное с возможностью распределения инсектицида вдоль указанного пути движения во время движения транспортного средства по пути движения; систему управления распределением, выполненную с возможностью управления количеством инсектицида, подлежащего распределению во время движения транспортного средства по пути движения; датчик насекомых, выполненный с возможностью детектирования находящихся в воздухе насекомых в объеме детектирования во время движения объема детектирования относительно поверхности грунта; причем объем детектирования расположен перед транспортным средством по направлению движения и приподнят над поверхностью грунта на минимальное вертикальное расстояние. Система управления распределением выполнена с возможностью приема данных датчика от датчика насекомых, при этом данные датчика указывают результат детектирования насекомых в объеме детектирования, и с возможностью управления количеством распределяемого инсектицида в зависимости от принятых данных датчика. Способ включает в себя этапы, на которых детектируют, посредством датчика насекомых, находящихся в воздухе насекомых, движущихся в объеме детектирования, при этом объем детектирования расположен перед движущимся транспортным средством, при этом объем детектирования приподнят над поверхностью грунта на минимальное вертикальное расстояние; управляют распределением инсектицидов из указанного движущегося транспортного средства в зависимости от результата детектирования находящихся в воздухе насекомых. Аппарат управления инсектицидным опрыскиванием содержит датчик насекомых и систему управления, выполненную с возможностью выдачи управляющего сигнала для управления дозатором инсектицида в зависимости от сигнала детектирования от датчика насекомых. Обеспечивается повышение эффективности опрыскивания и повышение детективирования и идентификации насекомых. 4 н. и 22 з.п. ф-лы, 9 ил.
1. Датчик насекомых для детектирования находящихся в воздухе насекомых, движущихся над поверхностью грунта, содержащий:
- осветительный модуль, выполненный с возможностью освещения объема детектирования, при этом объем детектирования приподнят над поверхностью грунта на минимальное вертикальное расстояние, и
- один или несколько детекторов, выполненных с возможностью детектирования света из объема детектирования;
причем осветительный модуль выполнен с возможностью испускания расходящегося пучка света, в частности с углом расходимости по меньшей мере в одном направлении величиной от 2° до 45°, например от 10° до 30°.
2. Датчик насекомых по п. 1, в котором осветительный модуль включает в себя источник света, выполненный с возможностью испускания не когерентного света, в частности один или несколько светоизлучающих диодов и/или одну или несколько галогенных ламп.
3. Датчик насекомых по п. 1 или 2, в котором расходящийся пучок света имеет угол расходимости по горизонтали, измеряемый в горизонтальной плоскости, и угол расходимости по вертикали, измеряемый в вертикальной плоскости, причем угол расходимости по вертикали меньше угла расходимости по горизонтали.
4. Датчик насекомых по п. 3, в котором угол расходимости по вертикали составляет от 2° до 10°, например от 3° до 8°, причем угол расходимости по горизонтали составляет от 10° до 45°, например от 10° до 30°.
5. Датчик насекомых по любому из пп. 1-4, в котором осветительный модуль выполнен с возможностью одновременного освещения всего объема детектирования.
6. Датчик насекомых по любому из пп. 1-5, в котором осветительный модуль содержит первый источник света, выполненный с возможностью выборочного испускания света в первом диапазоне длин волн, причем осветительный модуль дополнительно содержит второй источник света, выполненный с возможностью выборочного испускания света во втором диапазоне длин волн, отстоящем от первого диапазона длин волн.
7. Датчик насекомых по любому из пп. 1-6, в котором один или несколько детекторов включают в себя съемочную камеру и/или один или несколько фотодиодов.
8. Датчик насекомых по любому из пп. 1-7, в котором один или несколько детекторов выполнены с возможностью выборочного детектирования света в первом диапазоне длин волн и во втором диапазоне длин волн, не перекрывающем первый диапазон длин волн.
9. Датчик насекомых по любому из пп. 7, 8, в котором один или несколько детекторов включают в себя по меньшей мере одну матрицу фотодиодов, при этом каждый фотодиод матрицы выполнен с возможностью приема света из соответствующего подобъема объема детектирования.
10. Датчик насекомых по любому из пп. 1-9, содержащий процессор, выполненный с возможностью определения, на основе сигналов от одного или нескольких детекторов, количества насекомых, детектированных в объеме детектирования.
11. Датчик насекомых по любому из пп. 1-10, содержащий процессор, выполненный с возможностью идентификации, на основе сигналов от одного или нескольких детекторов, одного или нескольких типов насекомых и определения соответствующих количеств насекомых одного или нескольких типов, детектированных в объеме детектирования, в частности по одному или нескольким признакам, выбранным из следующих:
- детектированная траектория движения насекомого внутри объема детектирования;
- детектированная скорость движения насекомого внутри объема детектирования;
- одна или несколько детектированных частот взмахов крыльев;
- степень меланизации;
- степень блеска насекомых.
12. Датчик насекомых по любому из пп. 1-11, в котором вертикальное расстояние выбрано из следующих: от 10 см до 5 м, например от 20 см до 3 м, например от 20 см до 2 м, например от 50 см до 2 м.
13. Аппарат для распределения инсектицида по участку земли, при этом участок земли образует поверхность грунта, при этом аппарат включает в себя:
- транспортное средство, выполненное с возможностью движения по пути движения по поверхности грунта, при этом направление движения задано транспортным средством, при этом транспортное средство содержит устройство распределения инсектицида, выполненное с возможностью распределения инсектицида вдоль указанного пути движения во время движения транспортного средства по пути движения;
- систему управления распределением, выполненную с возможностью управления количеством инсектицида, подлежащего распределению во время движения транспортного средства по пути движения;
- датчик насекомых по любому из пп. 1-12, выполненный с возможностью детектирования находящихся в воздухе насекомых в объеме детектирования во время движения объема детектирования относительно поверхности грунта; причем объем детектирования расположен перед транспортным средством по направлению движения и приподнят над поверхностью грунта на минимальное вертикальное расстояние;
причем система управления распределением выполнена с возможностью приема данных датчика от датчика насекомых, при этом данные датчика указывают результат детектирования насекомых в объеме детектирования, и с возможностью управления количеством распределяемого инсектицида в зависимости от принятых данных датчика.
14. Аппарат по п. 13, в котором размер объема детектирования составляет по меньшей мере 0,2 м3, например по меньшей мере 0,5 м3, например по меньшей мере 1 м3, например по меньшей мере 2 м3, например по меньшей мере 3 м3.
15. Аппарат по п. 14, в котором размер объема детектирования составляет менее 20 м3, например менее 10 м3, например менее 5 м3.
16. Аппарат по любому из пп. 13-15, в котором отношение сторон объема детектирования, определяемое как отношение наибольшей стороны к наименьшей стороне минимальной ограничительной рамки объема детектирования, составляет не более 10:1, например не более 5:1, например не более 3:1, например не более 2:1.
17. Аппарат по п. 16, в котором отношение сторон составляет от 1:1 до 10:1, например от 1:1 до 5:1, например от 1:1 до 3:1, например от 2:1 до 3:1.
18. Аппарат по п. 16 или 17, в котором наименьшая сторона представляет собой вертикальную сторону минимальной ограничительной рамки.
19. Аппарат по п. 18, в котором минимальная ограничительная рамка образует вертикальную сторону и две горизонтальные стороны, причем отношение каждой из горизонтальных сторон к вертикальной стороне составляет от 2:1 до 10:1, например от 2:1 до 5:1, например от 2:1 до 3:1.
20. Аппарат по любому из пп. 13-19, в котором объем детектирования проходит от верха растительного покрова вверх.
21. Аппарат по любому из пп. 13-20, в котором длина объема детектирования, измеренная по направлению движения, составляет по меньшей мере 1 м, например по меньшей мере 2 м, например по меньшей мере 5 м.
22. Аппарат по любому из пп. 13-21, в котором объем детектирования имеет форму усеченного конуса или усеченной пирамиды.
23. Способ управления инсектицидным опрыскиванием, включающий в себя этапы, на которых:
- детектируют, посредством датчика насекомых по любому из п.п. 1-12, находящихся в воздухе насекомых, движущихся в объеме детектирования, при этом объем детектирования расположен перед движущимся транспортным средством, при этом объем детектирования приподнят над поверхностью грунта на минимальное вертикальное расстояние;
- управляют распределением инсектицидов из указанного движущегося транспортного средства в зависимости от результата детектирования находящихся в воздухе насекомых.
24. Способ по п. 23, в котором на этапе детектирования детектируют насекомых, движущихся по объему детектирования за период t выборки.
25. Способ по п. 24, в котором на этапе детектирования получают данные датчика, указывающие оценку популяции насекомых в объеме выборки над поверхностью грунта; при этом объем детектирования пересекает объем выборки во время движения объема детектирования относительно поверхности грунта за период t выборки.
26. Аппарат управления инсектицидным опрыскиванием, содержащий датчик насекомых по любому из пп. 1-12 и систему управления, выполненную с возможностью выдачи управляющего сигнала для управления дозатором инсектицида в зависимости от сигнала детектирования от датчика насекомых.
| 0 |
|
SU398668A1 | |
| US 9655356 B1, 23.05.2017 | |||
| Сырьевая смесь для получения цемент-НОгО КлиНКЕРА | 1976 |
|
SU808412A1 |
| УПРАВЛЯЮЩЕЕ УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПРОЦЕССОВ ТИТРОВАНИЯ | 1972 |
|
SU420992A1 |
| УСТРОЙСТВО ОТЛОВА САРАНЧИ | 2011 |
|
RU2520277C2 |

