Изобретение касается устройства для подсчета объектов, в частности яиц, содержащего множество первых детекторов, каждый из которых имеет локально ограниченную область обнаружения, которые могут детектировать электромагнитное излучение, в особенности свет в видимом или инфракрасном диапазоне, и расположены друг рядом с другом в первом ряду, узел оценки данных, соединенный с первыми детекторами и предназначенный для обработки сигналов первых детекторов и на основе сигналов каждого из первых детекторов выявлять наличие объекта в детекторной области. Дополнительным аспектом настоящего изобретения является способ подсчета объектов.
Подсчет объектов необходим во многих областях применения, например, для управления производственным процессом или конвейером. Задачей подсчитывающих устройств, а также способов подсчета является определение количества отдельных продуктов, которые были произведены за определенное время, в определенном месте и/или специфическим количеством продуктивных единиц. Для этого продукты должны либо продвигаться мимо стационарного устройства для подсчета, например, конвейера, либо устройство для подсчета должно само продвигаться вдоль продуктов.
Обычно устройства для подсчета объектов такого типа используются для подсчета яиц внутри и снаружи животноводческих помещений для яйценесущей птицы. В этом применении подсчет, с одной стороны, необходим для мониторинга и управления разгрузкой снесенных яиц из места кладки или места накопления после кладки, а также для мониторинга количества снесенных яиц, особенно при разбивке по животным, отделениям птичника, рядам птичника или по другим вместе взятым единицам, для получения информации о производительности курятника и дает возможность определять возможные нерегулярности, например, из-за болезней.
Из US 4868901 известна установка для подсчета, которая состоит из множества парных излучателей/детекторов, расположенных в одном ряду рядом друг с другом. Ряд расположен поперек транспортерной ленты, по которой яйца перемещаются мимо устройства для подсчета. На основе различных отражательных свойств поверхности транспортерной ленты и поверхности яйца на нем можно при помощи этого устройства для подсчета идентифицировать наличие яйца в области одного детектора. Несколько замеров, проведенных в различные временные интервалы, дают возможность установить связь между отдельным яйцом и определенным участком поверхности и на основе этого установить, что яйцо прошло под устройством для подсчета. Таким образом, через соответственное последующее повышение или понижение количества детекторов, регистрирующих поверхность яйца, можно предположить, что яйцо прошло под устройством и его можно подсчитать.
Проблема транспортировки объектов, особенно таких закругленных, как яйца, состоит в том, что при ускорении движения транспортировочной установки они могут начать двигаться независимо, например, катиться в противоположную транспортировке сторону. Особенно тогда, когда транспортер по причинам управления часто останавливают и опять включают, закругленные объекты могут двигаться через область действия устройства для подсчета в противоположном транспортировке направлении. Известное устройство для подсчета не может дифференцировать объекты, движущиеся в направлении транспортировки или против нее, так что при таких противоположно направленных движениях регулярно происходят ошибки при подсчете.
Поэтому существует необходимость такого устройства для подсчета, которое обеспечивает большую надежность при подсчете результатов, особенно тогда, когда время от времени объекты начинают двигаться в противоположную от транспортировки сторону.
Требования к управлению производственным процессом повышаются постоянно и особенно в областях, где производственный процесс связан с животными и по причине охраны животных существуют повышенные требования к регулированию производственным процессом. Поэтому существует необходимость в устройстве для подсчета, которое при необходимости обеспечит не только надежный подсчет продукта, но и в устройстве, которое обеспечит сбор дополнительных данных, по которым можно сделать выводы о прохождении производственного процесса и о возможных нарушениях производственного процесса, например, из-за болезни животных. Поэтому устройство для подсчета и счетное устройство определены в описании и в пунктах формулы изобретения как устройства, обеспечивающие подсчет объектов и, кроме того, обеспечивающие сбор дополнительных данных по посчитанным объектам. Аналогично, способ подсчета определен как способ, обеспечивающий подсчет объектов, но также и дополнительных данных об объекте. Поставленная задача решена путем создания устройства для подсчета, содержащего множество вторых детекторов, каждый из которых имеет локально ограниченную область детекции и может детектировать электромагнитное излучение, в частности, свет видимого или инфракрасного спектра, и расположен рядом друг с другом во втором ряду параллельно первому ряду; причем устройство оценки подключено ко вторым детекторам и предназначено для обработки сигналов вторых детекторов и на основе сигналов каждого детектора определяет место нахождения объекта в области второго детектора.
Изобретение позволяет просто и надежно устанавливать направление движения объекта относительно устройства для подсчета. Для этого устройство для подсчета согласно изобретению содержит по меньшей мере дополнительный ряд детекторов, которые расположены так, чтобы подсчитываемые объекты продвигались в радиусе действия детекторов первого и второго рядов при относительном движении, а также при транспортировке, следуя друг за другом. Устройство для подсчета согласно изобретению позволяет детектировать в дискретные временные интервалы на первой и второй линиях объект и его очертания хотя бы частично и путем сравнения по меньшей мере определений, осуществляемых в различные временные интервалы направления движения объекта. Устройство для подсчета согласно изобретению может надежно подсчитывать объекты, даже если они время от времени движутся в противоположном направлении относительно направления движения между устройством для подсчета и объектами, при этом объект не только детектируется и идентифицируется, а также устанавливается направление его движения.
Под детектором в этом контексте должен пониматься датчик любого вида, который предназначен для детекции места нахождения объекта на заданном участке действия детектора. Для этого особенно подходят бесконтактно работающие детекторы, например, приемники излучения, работающие в видимой или инфракрасной области. Детекторы могут при необходимости работать вместе с соответственными передатчиками, например, с излучателями света или с чем-то подобным, чтобы обеспечить временное ограниченное освещение области детекции, но могут также работать и с окружающим светом или другим имеющимся излучением или измеряемым свойством подсчитываемого объекта.
Первые и вторые детекторы расположены согласно изобретению в первом и втором рядах радом друг с другом. При этом не требуются не только равные расстояния между ними, но и их точное линейное или вертикальное расположение относительно направления движения между устройством для подсчета и объектами подсчета. Вместо этого для осуществления изобретения достаточно, если детекторы располагаются поперек или наискосок относительно направления движения в одном ряду линейно или со смещением по отношению друг к другу, чтобы таким образом сформировать область для прохождения объектов для подсчета.
Узел оценки данных может быть расположен непосредственно на устройстве для подсчета или на расстоянии от него. Узел оценки данных может быть разделен на множество отдельных узлов или быть в виде одной логической цепи. В первом варианте воплощения устройство оценки предназначено путем сравнения сигналов первых и вторых расположенных рядом детекторов для определения по меньшей мере одного сечения контура объекта перпендикулярно направлению детекции. Установление контура, по меньшей мере частичного, способствует надежному и с наименьшими затратами на обработку данных для опознания объекта. Контур представляет собой типично двухразмерную форму и может быть установлен как фрагмент через разовую регистрацию данных первыми и вторыми детекторами или как большие фрагменты из множества проведенных через временные интервалы регистраций данных первых и вторых детекторов при наличии относительного движения между детекторами и объектами. Точка на контуре объекта может быть установлена как точка, в которой происходит характерное изменение между двумя сигналами детектора в зависимости от расположения в помещении или времени приема сигнала. Типично, что два соседних детектора, сканирующих контур, показывают отличные от других сигналы, и также соседние детекторы по отношению к этим показывают похожие сигналы, так что можно сделать заключение о наличии контурной линии объекта между двумя первыми детекторами. Так как контур типично считается непрерывной линией, то возможно при помощи интерполяции и логической обработки данных точек на контуре определить сплошную контурную линию. Это может быть получено и в узле обработки данных.
При этом особенно предпочтительно, если узел оценки предназначен для определения направления движения объекта относительно детекторов путем сравнения двух сечений контура объекта. Определение контурной линии позволяет принципиально сделать заключение не только о наличии объекта в радиусе действия детекторов, но и о его положении относительно детекторов. Путем сравнения двух контуров или фрагментов контурных линий можно сделать заключение об изменении положения объекта относительно детекторов, а затем и о направлении движения объекта. Это позволяет определить направление движения при транспортировке или неправильное направление движения против направления транспортировки, например, перекатывание объекта. При этом вместе с направлением движения можно установить и скорость передвижения, если дифференцировать прошедший путь объекта в разные промежутки времени между двумя измерениями.
Дополнительным преимуществом является то, что определенное количество первых и вторых детекторов расположено в первом и втором рядах, при этом имеется интерфейс для подключения устройства к другому устройству с первыми и вторыми детекторами так, чтобы первые и вторые ряды двух устройств были расположены как удлинение по отношению друг к другу. Устройства для подсчета упомянутого вида часто применяются для подсчета объектов, двигающихся на разной ширине, например, различной ширине транспортера. Устройства для подсчета по техническому состоянию имеют определенную ширину, объекты перемещаются все вместе для подсчета часто через направляющие устройства, чтобы предотвратить перемещение объектов вне области для подсчета. Это направляющее устройство может привести к механическому повреждению объектов. Усовершенствование изобретения способствует расширению устройства для подсчета на любую ширину, при этом множество отдельных узлов подсчета так соединено между собой, что оно создает достаточно длинное устройство для подсчета, которое может проходить поперек области подсчета любой ширины. Таким образом, возможно модульное приспособление устройства для подсчета к производственным или транспортно-техническим условиям, особенно к ширине ленты транспортера, и способствует бережному подсчету объектов.
Также предпочтительно, чтобы детекторы осуществляли подсчет в инфракрасной области, чтобы присутствовал по меньшей мере один источник инфракрасного излучения для освещения областей детекции. В особенности в областях, где преобладает освещение дневного света, преимущественно использовать другие волны для детекции. Для этого особо подходит диапазон инфракрасных волн. Диапазон длины волн, используемый для измерения, не должен при другом применении притягивать вредных насекомых, для чего особенно пригоден инфракрасный свет. Детекция в диапазоне инфракрасных волн способствует проведению измерений определенным способом, зависящих от времени, через целенаправленное и временно ограниченное инфракрасное освещение. В частности, отдельные участки могут освещаться в определенное время последовательно друг за другом, чтобы предотвратить подделку сигналов измерения на соседних участках детекции.
Предпочтительно также, чтобы узел обработки определял одно сечение контура объекта перпендикулярно направлению детекции и путем сравнения двух сигналов соседних первого и второго детекторов и определения направления движения объекта относительно детекторов путем сравнения двух сечений контура объекта, определенных в различные временные интервалы, и также определения, появился ли новый объект, при этом устройство обработки содержит счетчик, повышающий счет на единицу, если новый объект продвинулся в направлении поступления в пределы детекции детекторов и был идентифицирован. Счетчик может быть, например, цифровым устройством хранения данных с соответствующей логической цепью. Направление поступления является обычным направлением движения между счетчиком и подсчитываемыми объектами, например, направлением транспортировки объектов транспортирующим устройством. Под идентификацией объекта в настоящем описании понимают узнавание объекта на основе контура или его сечения.
Особенное значение по этой причине имеет проверка следующего: является ли детектируемый объект уже посчитанным или речь идет об еще не посчитанном, а значит новом объекте. Это можно осуществить маркировкой объектов, например, через регистрацию в банке данных, а заново поступившие объекты сравнить с зарегистрированными или (альтернативно или дополнительно) сравнить размещение объектов в разные два промежутка времени относительно счетчика, чтобы установить, является ли объект идентичным, а значит посчитанным, или различным, а значит новым объектом.
При этом особо предпочтительно, чтобы устройство для подсчета обеспечивало снижение на единицу, если уже посчитанный и идентифицированный объект, прошедший детекторы в области детекции, начнет двигаться из области детекции против начального направления поступления. Таким образом надежно устанавливается результат подсчета, даже если возникают нежелательные нерегулярные движения объектов, например, перекатывание объектов против направления транспортировки. При этом устройство для подсчета снижает счет не только при поступлении объекта в область детекции и выхода из нее против регулярного направления движения, но и при поступлении объекта в регулярном направлении движения, его подсчета и уже после того его движения и выхода противоположно участку детекции и регулярному направлению движения.
Оба варианта воплощения могут видоизменяться на любой манер, при этом будут определяться другие моменты отсчета, например, характерные изменения в профиле подсчитываемых объектов или характерные изменения в цвете или контрасте объектов.
Также предпочтительно, если устройство обработки данных будет оценивать несколько объектов, зарегистрированных сразу во многих областях детекции детекторов. При определенной ширине детекции подсчет, и особенно когда устройство подсчета или транспортирования с высокой квотой проходимости, непрактично располагать поодиночке друг за другом подсчитываемые объекты, а объекты должны проходить устройство подсчета в двойном или многократном количестве. В этом случае предпочтительно, чтобы устройство для обработки данных также могло оценивать многие продукты одновременно, это значит предпринимать дифференцирование объектов, находящихся рядом друг с другом одновременно в области детекции. При этом устройство для обработки данных логично должно быть устроено так, чтобы при контактах контурных линий или даже пересечениях контурных линий двух или большего количества соприкасающихся или пересекающихся объектов можно было дифференцировать и посчитать объекты.
Особо предпочтительно, если устройство согласно изобретению будет содержать блок памяти, в котором сохранен по меньшей мере один контур, предпочтительно, несколько контуров одного или большего количества объектов и узел сравнения данных для сравнения контура объекта с сохраненным контуром(-ами) и идентификации объекта. Это обеспечивает целый ряд дополнительных функций. Так, с одной стороны, возможно проводить различие между подсчитываемыми объектами в области детекции и другими проходящими структурами. Это выгодно в том случае, когда объекты транспортируются на структурных транспортерах, например, дырчатых, прорезных или перфорированных транспортерных лентах или на транспортерах с рифлением, утолщениями или чем-либо подобным, и когда необходимо различение между перфорацией или прочими структурами транспортера и объектом.
Это позволяет проводить контроль качества объектов подсчета, при этом объекты, находящиеся в нормальных геометрических пределах, подлежат подсчету, а объекты, находящиеся вне этой области, не подходящие к зарегистрированному контуру, не будут подсчитываться или же будут подсчитываться в соответственном специальном банке данных для ошибок, который со своей стороны будет подавать сигнал об ошибочном продукте. Типичным применением является, например, опознание жировых яиц при подсчете куриных яиц, как яиц без скорлупы, которые показывают типичный контур пониженной высоты и увеличенной ширины. Зарегистрированные контуры должны предусматривать, с одной стороны, возможные варианты объекта, такие как охват всех типично возникающих вариантов контура, с другой стороны, охват возможных вариантов, появившихся из-за приподнятого, кривого положения, или опрокидывания продукта и т.п. Например, яйцо в поставленном положении может иметь круглую форму, отличную от обычной овальной формы, должно быть, тем не менее, узнано.
В общем и особенно для указанной цели выгодно, если в устройстве первые и/или вторые детекторы будут устанавливать в области детекции яркость света и/или цветовой тон. Особенно, если объекты подсчета имеют искривленную поверхность, имеющую различное распределение яркости при детекции поверхности объектов при одностороннем или многостороннем освещении. Эти различия в интенсивности яркости отдельных сечений поверхности подсчитываемых объектов могут быть использованы для особо точной идентификации объекта. По такому же принципу, для точной идентификации объекта, могут быть использованы цветовые тона поверхностных областей объектов. Например, возможно поставленное яйцо, которое имеет круглый контур, отличить от отверстия в транспортерной ленте, так как распределение интенсивности яркости в области детекции поверхности яйца отличается от той же в отверстии транспортера.
При этом особенно предпочтительно, если устройство для обработки данных будет идентифицировать по интенсивности яркости и/или цветового тона отличительные приметы на поверхности объекта, особенно степень загрязнения. Таким образом, могут точнее различаться объекты, и соответственно увеличиваются показатели подсчета различий для получения точнейших результатов при подсчете объектов. Особенно это усовершенствование предназначено для того, чтобы фиксировать неполадки в производстве, например, непривычно высокая степень загрязнения продукта, которая указывает на то, что в определенных местах нужно провести чистку. Комбинация с цветовым тоном способствует оценке степени загрязнения и при применении для подсчета яиц помогает определить остатки крови на яйцах, что позволяет быстро заметить травмы животных и начать соответствующее лечение. И здесь может быть опять же предусмотрен отдельный блок памяти ошибок для определенных, отклоняющихся от нормы, результатов детекции; и может, альтернативно или дополнительно, срабатывать сигнал тревоги, чтобы указать на результаты детекции, отклоняющиеся от нормы.
При этом особенно предпочтительно, если устройство будет содержать блок памяти, в котором будет регистрироваться по меньшей мере одна, а предпочтительно, и большее количество предельных величин или распределений интенсивности яркости и/или цветового тона внутри контура объекта, и посредством узла сравнения данных сопоставлять определенные детектором локальные и центрированные величины или распределения яркости интенсивности и/или цветового тона объекта с зарегистрированными предельными величинами, и идентифицировать объект при превышении и/или недостижении предельной величины или совпадении зарегистрированных и учтенных образцов распределения. Эта форма воплощения функционирует так же, как и перед этим описанная форма для сравнения детектированных контуров с зарегистрированными контурами, и способствует соответственному уравнению распределения интенсивности яркости или цветовых тонов с зарегистрированными распределениями интенсивности яркости и цветовых тонов, чтобы способствовать различительной классификации продуктов и опознанию ошибок продукта.
Устройство может содержать дополнительно узел собственного диагностирования и коррекции ошибок, который способен опознать неполадки в каждом отдельном детекторе и побудить устройство для оценки данных не принимать во внимание величины такого детектора. Такой собственный узел диагностики и коррекции может, например, классифицировать как бракованные и изъять из оценки результатов детекции детекторы, которые в определенный промежуток времени показывали одинаковую величину в то время, как соседние детекторы показывали отличительные величины, чтобы таким способом избежать ошибочного опознания контуров выпавшими из рабочего процесса детекторами. Неисправный детектор заменяется, предпочтительно, через соседний детектор.
При этом узел собственной диагностики и коррекции устроен так, что при превышении определенного количества поврежденных детекторов подает сигнал тревоги. Обычно при исключении отдельных детекторов подсчитывающего устройства они компенсируются и гарантируется надежный результат подсчета. При определенном количестве неисправных детекторов результат подсчета неизбежно больше не совпадает с действительно прошедшими объектами, так как компенсация неисправных детекторов больше невозможна. В этом случае обычно подается сигнал тревоги, чтобы устранить ошибку, например, провести чистку детекторов.
Далее, устройство может быть усовершенствовано так, чтобы узел оценки данных был способен на основе установленных контуров объекта и на основе упомянутых зарегистрированных рекомендуемых величин подсчитать объем и/или вес объекта, затем выдать эти величины или зарегистрировать в банке данных. Зафиксированный детектором контур часто обеспечивает классификацию и устанавливает различия между объектами, отличающимися по размеру и геометрическому типу. При этом возможно на основе установленного контура сделать выводы об объеме и весе объекта, при этом площадь детекции, установленная по контурной линии, обрабатывается с рекомендуемыми величинами, которые представляют собой связь между типичным объемом, а также весом объекта на основе установленной контурной линии. Величины, установленные таким образом, предпочтительно регистрировать в отдельных узлах банка данных. Таким образом, можно при подсчете куриных яиц провести классификацию по различным весовым категориям и предпринять упрощенное планирование продукции и контроля.
Дальнейшее усовершенствование устройства настоящего изобретения состоит в использовании множества рядов детектора. Это способствует подробнейшему анализу контуров, распределения цвета и распределения интенсивности яркости подсчитываемых объектов. Идеальным образом этот вариант воплощения может использовать детектор цифрового изображения с многорядным оптическим датчиком, например, CCD-датчиком, и таким образом, устройство будет содержать множество рядов и в каждом случае множество детекторов. Это, например, возможно в устройстве с соответствующей цифровой видеокамерой. Эта модель обеспечивает идентификацию и быстрый надежный подсчет объектов путем детекции всей контурной линии объектов при разовой регистрации дат. Далее, устройство обеспечивает детекцию цвета и интенсивности яркости внутри и снаружи контура объекта.
Следующим аспектом изобретения является управляемое по требованию направление транспортировки для объектов, особенно для яиц, включая транспортирующее устройство, устройство для подсчета объектов, поставляемых в направлении транспортировки, и управление, устроенное так, чтобы регулировать движение объектов по направлению транспортировки, если заранее определенное количество объектов уже подсчитано устройством для подсчета.
Это устройство для транспортировки обеспечивает регулирование транспортировки по требованию, особенно на тех участках, где имеет место прерывание продукции или прерывание поступления продуктов для транспортировки, то есть управление устройством для транспортировки только тогда, когда поступило такое количество продуктов, которое достаточно для приведения в действие транспортирующего устройства в течение ограниченного времени.
Следующим аспектом изобретения является устройство для транспортировки и подсчета и/или контроля качества яиц, содержащее приводимый в действие непрерывный транспортер для транспортировки яиц, устройство для подсчета яиц, согласно предыдущим пунктам, включая большое количество рядов детекторов с множеством детекторов для определения контура и распределения интенсивности яркости и/или цвета каждого яйца, которое обеспечивает подсчет и анализ транспортируемых лентой яиц и имеет интерфейс для связи с выдачей и/или устройством хранения данных транспортируемых яиц во многих заранее определенных весовых категориях. Лента транспортера пригодна для управления последовательностью яиц в предлежащих к транспортирующему устройству производственных областях, впереди транспортирующего устройства.
Следующим аспектом изобретения является способ подсчета объектов по необходимости согласно пункту 20. Этот способ может быть усовершенствован на основе пунктов 21-34. Преимущества способа и его усовершенствования основаны на конструкции тех устройств и усовершенствований в устройствах, которые специально предназначены для этого процесса.
Предпочтительно изобретение описывается со ссылками на прилагаемые чертежи, на которых:
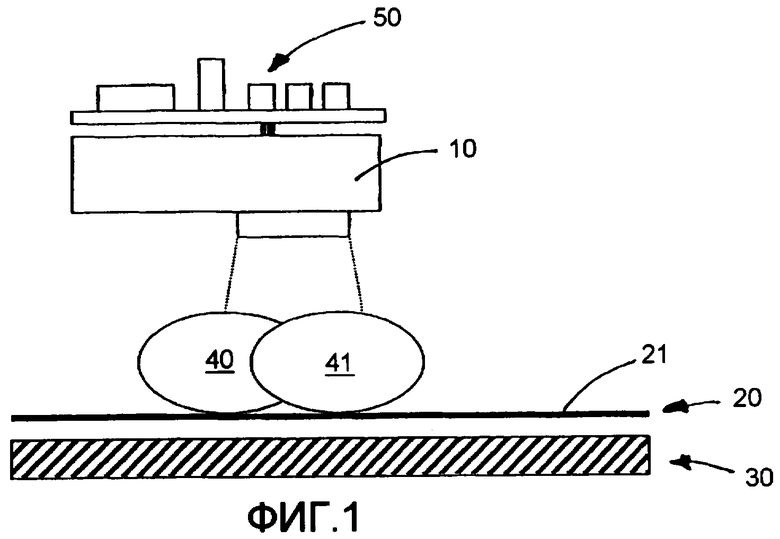
фиг.1 изображает вид сбоку устройства для подсчета объектов, расположенных над транспортирующим устройством, согласно изобретению;
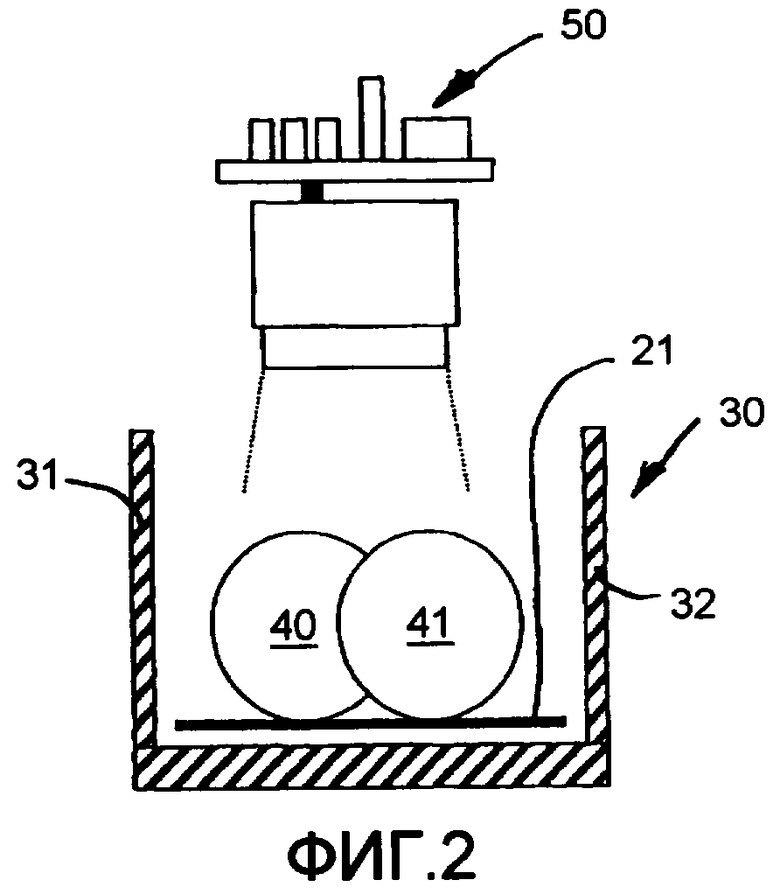
фиг.2 - поперечный разрез устройства для подсчета согласно изобретению; и
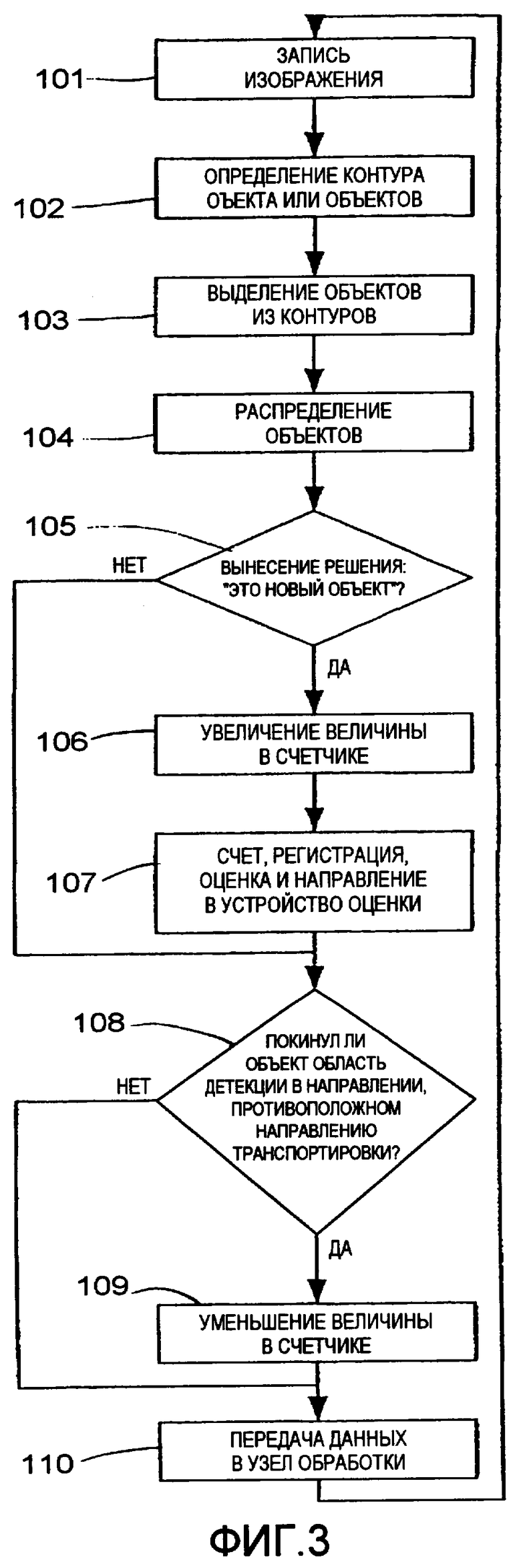
фиг.3 - блок-схему этапов способа подсчета согласно изобретению.
Устройство согласно изобретению содержит цифровую многоячейковую CCD-камеру 10, которая сканирует участок обзора, расположенный вертикально внизу под определенным углом.
Под областью обзора CCD-камеры 10 проходит непрерывная транспортирующая лента 20, верхняя часть 21 которой расположена в виде U-образного направляющего устройства 30, так что обе ветви 31, 32 U-образного направляющего устройства мешают падать в сторону яйцам, находящимся на верхней части транспортирующей ленты 21.
Транспортирующая лента 20 имеет большое количество отверстий (не показано), через которые яйцо не может провалиться в отверстие, даже местами яйцо ложится в такое отверстие и так относительно фиксируется на транспортирующей ленте. Транспортирующая лента имеет типичную ширину в 10 см, но, тем не менее, устройство может иметь и более узкие или более широкие или другие по конструкции ленты, например, тросовый транспортер.
Яйца 40, 41, положенные на верхнюю часть транспортирующей ленты 21, транспортируются через участок обзора CCD-камеры 10 и при этом прощупываются построчно с высокой частотой и регистрируются. Узел 50 оценки данных, прикрепленный к CCD-камере 10, регистрирует различные данные изображений из области обзора CCD-камеры и идентифицирует яйца на транспортирующей ленте 20.
Контур яиц, то есть их очертание, представленное в направлении обзора CCD-камеры 10, распознается узлом оценки данных сразу, как только яйцо достигает области обзора CCD-камеры. Распознанное таким образом яйцо сравнивается с профилями яиц, зарегистрированными в узле сравнения данных, и так идентифицируется. После идентификации яйцо отмечается как таковое в устройстве сравнения данных, и его движение прослеживается через участок обзора. Как только яйцо идентифицируется, увеличивается на 1 величина в накопителе данных узла 50 сравнения. Яйцо прослеживается дальше и обычно покидает участок обзора CCD-камеры 10 с противоположной стороны от поступления. Если, в случае исключения, яйцо покинет участок обзора с той же стороны, с которой поступило, то величина в узле сравнения данных уменьшится на 1. Это уменьшение последует и тогда, когда яйцо на участке обзора будет продвигаться в противоположную транспортировке сторону.
CCD-камера имеет интегрированное устройство инфракрасного света, и CCD-датчики работают в области инфракрасного света так, что CCD-камера не зависит от освещения пространства, окружающего устройство для подсчета.
CCD-камера 10 схватывает образец отражения яйца, то есть распределения интенсивности яркости поверхности яйца, и может различать изображения отверстий в ленте транспортера 20 и лежащими на ней яйцами.
CCD-камера обладает коммуникативным интерфейсом (не показан), через который возможно соединение нескольких CCD-камер, чтобы обеспечить более широкую область обзора. Данные изображений, собранные через спаренные CCD-камеры по такому принципу, обрабатываются через центральный узел сравнения данных. Области пересечения регистрируются в узле сравнения данных и оцениваются так, чтобы в этих областях пресечь двойной учет.
Узел 50 обработки данных имеет коммуникативный интерфейс, при помощи которого данные, детектируемые CCD-камерами и обработанные узлом сравнения данных, могут выдаваться дальше. В узле обработки/сравнения данных, в свою очередь, интегрирована программа диагностирования, то есть CCD-камера 10 опознает функциональные неполадки и оптические загрязнения и подает соответствующий сигнал.
Узел 50 обработки данных учитывает поверхность каждого идентифицированного яйца и, ссылаясь на рекомендации о кривизне поверхности яйца в накопителе, высчитывает процент загрязненной поверхности от общей площади яйца. При превышении процента, определенного заранее, повышается счет в накопителе данных.
Далее, узел 50 обработки данных сравнивает внешний контур идентифицированного яйца с отложенными в накопителе заданными контурами яиц и таким образом может опознать жировое яйцо. Опять же при опознании жирового яйца повышается счет в накопителе данных. Таким же образом узел 50 обработки данных может через опознание очертания и сравнение с зарегистрированными заданными величинами очертаний распознать и посчитать разбитые или неполноценные яйца.
В узле обработки данных находится таблица рекомендаций, которая содержит факторы расчета и обеспечивает расчет объема яйца из распознанного контура для различных углов просмотра, форм и размеров. Таблица рекомендаций содержит факторы расчетов, по которым возможно из объема яйца высчитать общий вес и, следовательно, идентифицировать яйцо в весовую категорию. При необходимости имеются в наличии и отдельные счетчики, которые способствуют развернутому счету яиц по весовым категориям.
Устройство для подсчета может также регистрировать через прощупывание скорость передвижения транспортирующей ленты и быть готовым подать сигнал.
На фиг.3 показан примерный процесс подсчета в устройстве для подсчета.
Циклический процесс начинается с этапа 101, при котором датчик подсчета записывает изображение. Изображение пересылается в узел обработки данных, в котором на этапе 102 определяется контур объекта или объектов в области изображения, и на этапе 103 из контуров выделяются объекты. Выделенные таким образом объекты распределяются на этапе 104, чтобы вынести решение 105 о том, новый ли это объект или уже идентифицированный.
В зависимости от решения 105, в случае, если найдены новые объекты, на этапе 106 увеличивается величина в счетчике на 1, и на этапе 107 рассчитывается, регистрируется, оценивается и направляется в устройство оценки для статистического обобщения относительных признаков найденного объекта или найденных объектов, таких как загрязнение, определение размера, объема и определение веса. Если на этапе 105 не были найдены новые объекты, то этапы 106 и 107 можно пропустить и продолжить процесс непосредственно на этапе 108.
На этапе 108 проверяется на основе рассчитанных и идентифицированных объектов, покинул ли объект область детекции в направлении, противоположном направлению транспортировки. Если да, в этом случае на этапе 109 уменьшается величина в счетчике на то количество объектов, которое покинуло эту область в направлении, противоположном нормальному направлению транспортировки. Если отсутствуют объекты, покинувшие этот предел в направлении, противоположном направлению транспортировки, то величина в счетчике остается неизменной.
Цикл заканчивается на этапе 110, при котором данные передаются в узел обработки данных или статистический узел, и начинается заново этапом 101.
Согласно изобретению предложены устройство и способ подсчета объектов, в частности яиц, которые обеспечивают дифференцированное определение и распечатку выполняемых функций и возможных неполадок во время работы и, следовательно, способствуют экономичному ходу производственного процесса. Устройство чувствительно к неполадкам в процессе подсчета и само о них сообщает. Дополнительные данные, такие как загрязнение или дефекты продуктов, могут быть также распознаны и определены.
Предложены устройство и способ для подсчета объектов, в частности яиц, которые обеспечивают дифференцированное определение и распечатку выполняемых функций и возможных неполадок во время работы и способствуют экономичному ходу производственного процесса. Устройство согласно изобретению содержит множество первых детекторов и множество вторых детекторов, каждый из которых имеет локально определенную область детекции и может детектировать электромагнитное излучение, в частности, свет видимого и инфракрасного спектра из области детекции, причем указанные детекторы размещены один за другим на первой и второй линиях и вторая линия параллельна первой линии. Узел обработки данных подключен к первым и вторым детекторам и предназначен для обработки сигналов каждого детектора для определения наличия объекта в направлении детектора. Технический результат - повышение точности подсчета за счет учета движения объектов в обратном направлении. 6 н. и 21 з.п. ф-лы, 3 ил.
1. Устройство для подсчета объектов, в частности яиц, содержащее множество первых детекторов,
каждый из которых имеет локально ограниченную область детектирования и которые
предназначены для детектирования электромагнитного излучения в области детектирования, особенно света в видимой и инфракрасной области,
расположены рядом друг с другом в первом ряду, узел обработки данных, соединенный с первыми детекторами и предназначенный для обработки сигналов первых детекторов, и на основе сигналов каждого первого детектора установления наличия объекта в области детектирования первого детектора,
и множество вторых детекторов,
каждый из которых имеет локально ограниченную область детектирования и которые
предназначены для детектирования электромагнитного излучения в области детектирования, особенно света в видимой и инфракрасной области,
расположены рядом друг с другом во втором ряду, параллельно первому ряду, при этом узел обработки данных соединен со вторыми детекторами и предназначен для обработки сигналов вторых детекторов, и на основе сигналов каждого детектора для определения наличия объекта в области детектирования второго детектора,
отличающееся тем, что
содержит множество рядов детекторов, для чего использован детектор с цифровым детектированием с многорядным оптическим датчиком, типа датчика с зарядовой связью, и таким образом обеспечивая множество рядов с множеством детекторов,
при этом узел обработки данных выполнен с возможностью определения по меньшей мере одного сечения контура объекта перпендикулярно направлению детектирования путем сравнения детекторных сигналов соседних первых детекторов и соседних вторых детекторов, определения направления движения объекта относительно детекторов путем сравнения двух сечений контура объекта, сделанных в разное время, и определения, поступил ли новый объект в область детектирования,
при этом узел обработки данных содержит устройство для подсчета, выполненное с возможностью увеличения счетчика на единицу, если новый объект переместился в направлении поступления в область детектирования детекторов и идентифицирован,
причем устройство для подсчета выполнено с возможностью понижения счетчика на единицу, если объект, начавший движение в области детектирования детекторов и идентифицированный, начинает двигаться в противоположном направлении от области детектирования.
2. Устройство по п.1, отличающееся тем, что узел обработки данных выполнен с возможностью сравнения детекторных сигналов соседних первых детекторов и соседних вторых детекторов, определения по меньшей мере одного сечения контура объекта вертикально к направлению детектирования.
3. Устройство по п.2, отличающееся тем, что узел обработки данных выполнен с возможностью определения направления движения объекта относительно детекторов, путем сравнения двух сечений контура объекта, определенных в разное время.
4. Устройство по п.1, отличающееся тем, что определенное количество первых и вторых детекторов расположено в первом и во втором рядах, при этом устройство содержит интерфейс для подключения устройства к другим устройствам, имеющим первые и вторые детекторы, так что первые и вторые ряды двух устройств продолжают друг друга.
5. Устройство по п.1, отличающееся тем, что детекторы предназначены для детектирования в инфракрасном диапазоне волн, при этом имеется по меньшей мере один источник инфракрасного излучения для освещения областей детектирования.
6. Устройство по п.5, отличающееся тем, что для каждого детектора имеется источник инфракрасного излучения для освещения области детектирования детектора.
7. Устройство по п.1, отличающееся тем, что узел обработки данных выполнен с возможностью оценки нескольких объектов, идентифицированных в области детектирования детекторов, в одно время.
8. Устройство по п.1, отличающееся тем, что содержит блок памяти для хранения по меньшей мере одного контура, предпочтительно, нескольких ранее известных контуров одного или нескольких объектов, и узел сравнения для сравнения контура объекта, детектированного детектором с сохраненным(-ыми) контуром(-ами), для идентификации объекта.
9. Устройство по п.1, отличающееся тем, что первые и/или вторые детекторы предназначены для определения интенсивности яркости и/или цветового тона из области детектирования.
10. Устройство по п.9, отличающееся тем, что узел обработки данных предназначен для определения признаков поверхности объекта, в частности степени загрязнения на основе интенсивности яркости и/или цветового тона.
11. Устройство по п.9, отличающееся тем, что содержит блок памяти для хранения по меньшей мере одной, предпочтительно, нескольких известных предельных величин или распределений интенсивности яркости и/или цветового тона в контуре объекта, и узел сравнения данных для сравнения локальной или средней величины, определенной детектором, или распределения интенсивности яркости и/или цветового тона объекта, с сохраненными предельными величинами или распределениями интенсивности яркости и/или цветового тона, и идентификации объекта при превышении или недостижении предельной величины или при совпадении с сохраненной и определенной величиной распределения.
12. Устройство по п.1, отличающееся тем, что содержит узел самодиагностики и коррекции для идентификации повреждения отдельного детектора и подачи команды узлу обработки данных не принимать во внимание замеренные величины указанных детекторов.
13. Устройство по п.12, отличающееся тем, что узел самодиагностики и коррекции предназначен для выдачи сигнала тревоги при превышении определенного количества поврежденных детекторов.
14. Устройство по п.1, отличающееся тем, что узел обработки данных предназначен для подсчета объема и/или веса объекта на основе определенного контура объекта и на основе известных сохраненных заданных величин, выдачи этих величин или сохранения в блоке памяти.
15. Управляемое устройство транспортировки объектов, в частности яиц, содержащее
транспортирующее устройство для транспортировки объектов,
устройство для подсчета по любому из предшествующих пунктов для подсчета объектов, подаваемых на устройство транспортировки,
устройство управления для транспортировки объектов на транспортирующем устройстве, когда заданное количество объектов уже посчитано устройством для подсчета.
16. Устройство для транспортировки и подсчета и/или для контроля качества яиц, содержащее
управляемую транспортирующую ленту для транспортировки яиц,
устройство для подсчета по любому из предшествующих пп.1-14, содержащее несколько детекторных рядов с множеством детекторов для определения контура и распределения интенсивности яркости и/или цвета каждого яйца, и обеспечивающее подсчет и анализ транспортируемых яиц,
интерфейс для выдачи и/или блок памяти для хранения количества транспортируемых яиц в нескольких заранее определенных весовых категориях.
17. Способ подсчета объектов, в частности яиц, заключающийся в том, что определяют электромагнитное излучение, в частности свет в видимой или инфракрасной области из одной локально ограниченной области детектирования множества первых детекторов, расположенных рядом друг с другом в первом ряду,
определяют наличие объекта в области детектирования по меньшей мере одного из первых детекторов посредством электромагнитного излучения, полученного из области детектирования,
определяют электромагнитное излучение, в частности свет в видимой или инфракрасной области от одной локально ограниченной области детектирования множества вторых детекторов, расположенных рядом друг с другом во втором ряду,
определяют наличие объекта в области детектирования по меньшей мере одного из вторых детекторов на основе полученного из области детектирования электромагнитного излучения,
отличающийся тем, что
используют множество рядов детекторов, для чего используют детектор с цифровым детектированием с многорядным оптическим датчиком, типа датчика с зарядовой связью, и таким образом обеспечивают множество рядов с множеством детекторов,
сравнивают сигналы соседних первых детекторов и соседних вторых детекторов и определяют по меньшей мере одно сечение контура объекта перпендикулярно направлению детектирования, и
определяют и сравнивают два контура или сечения контура объекта, которые идентифицированы и определены в разное время, и по размещению контуров или сечений и по времени между измерениями определяют направление движения объекта относительно детекторов и определяют, являются ли определенные в разное время контуры или сечения контуров одним и тем же объектом или разными объектами,
повышают счетчик на единицу, если неустановленный объект перемещается в определенном направлении в области детектирования детекторов и там идентифицируется.
счетчик понижают на единицу, если идентифицированный и посчитанный объект перемещается против направления поступления из области детектирования.
18. Способ по п.17, отличающийся тем, что освещают область детектирования одним или несколькими источниками инфракрасного излучения.
19. Способ по любому из пп.17 или 18, отличающийся тем, что сравнивают определенный детекторами контур объекта с сохраненными известными контурами.
20. Способ по любому из пп.17 или 18, отличающийся тем, что посредством первых и/или вторых детекторов определяют интенсивность яркости и/или цветовой тон из области детектирования.
21. Способ по п.20, отличающийся тем, что определяют степень и вид загрязненности поверхности объекта на основе интенсивности яркости и/или цветового тона поверхности.
22. Способ по п.20, отличающийся тем, что сравнивают локальное или среднее значение, определенное детекторами, или распределение интенсивности яркости и/или цветового тона объекта с сохраненными пороговыми значениями или распределениями интенсивности яркости и/или цветовых тонов.
23. Способ по любому из пп.17, 18, 21, 22, отличающийся тем, что идентифицируют неполадки в работе каждого отдельного детектора и используют сигналы расположенного рядом детектора вместо сигналов от неисправных детекторов.
24. Способ по п.23, отличающийся тем, что формируют сигнал тревоги при превышении определенного количества неисправных детекторов.
25. Способ по любому из пп.17, 18, 21, 22, 24, отличающийся тем, что подсчитывают объем и вес объекта на основе контуров объекта и на основе сохраненных ссылочных величин, и полученные величины сохраняют в блоке памяти.
26. Способ управления устройством для транспортировки объектов, в частности яиц, заключающийся в том, что
подают объекты к устройству транспортировки,
осуществляют подсчет поданных для транспортировки объектов согласно способу, заявленному по пп.17-25,
транспортируют объекты по устройству для транспортировки, после подсчета количества объектов.
27. Способ транспортировки и подсчета и/или контроля качества яиц, заключающийся в том, что
осуществляют транспортировку яиц на ленточном транспортере,
осуществляют подсчет объектов способом, заявленным по пп.17-25,
определяют контур, интенсивность яркости и/или цветового распределения каждого яйца и идентифицируют яйца на основе этого контура, интенсивности яркости и/или цветового распределения,
подсчитывают вес яйца из установленного контура яйца,
осуществляют расчет загрязненной части поверхности яйца по интенсивности яркости и/или распределения цвета,
выдают и/или сохраняют данные о количестве яиц и/или о степени загрязненности транспортируемых яиц в нескольких ранее определенных весовых категориях.
| JP 2003346124 А, 05.12.2003 | |||
| US 4868901 А, 19.09.1989 | |||
| Способ счета яиц | 1987 |
|
SU1483470A1 |
| СИСТЕМА ВИЗУАЛЬНОГО ВОСПРОИЗВЕДЕНИЯ РЕКЛАМНОЙ ИНФОРМАЦИИ | 1997 |
|
RU2129309C1 |
| JP 2000235005 A, 29.08.2000 | |||
| JP 2001027612 A, 30.01.2001 | |||
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
| US 4253120 A, 24.02.1981 | |||
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |

