Изобретение относится к судостроению, в частности к навигационным системам, используемым на маломерных судах. Известны различные навигационные системы, в том числе и оптические радиолокационные системы, направленные на обнаружение и предупреждение о крупногабаритных объектах встречных судов. Это является недостатком данных систем, так как они не позволяют - определить малогабаритные предметы, находящиеся в воде, в частности, затопленные деревья, бревна, доски, люди, мусор, погибшие животные лоси, олени, медведи и т.д. Необходимость разработки способа и системы обнаружения предметов воде для маломерного судна так же еще связана с тем, что при движении маломерного судна часто поднимается его носовая часть, тем более в режиме выхода на глиссирование, и судоводитель чаще всего находится либо в средней, либо в кормовой части, что существенно снижает видимость. Также данное решение будет актуально и в сумерках и в условиях плохой видимости - туман, дождь, волнение.
Ближайшим аналогом можно считать решение KR2020050808A(KR20200050808(A)) «SYSTEM FOR PREDICTING DEGREE OF COLLISION RISK AND GUIDING SAFE VOYAGE ROUTE THROUGH FUSING NAVIGATION SENSOR INSIDE SHIP AND IMAGE INFORMATION» (СИСТЕМА ПРОГНОЗИРОВАНИЯ СТЕПЕНИ РИСКА СТОЛКНОВЕНИЯ И ОПРЕДЕЛЕНИЯ БЕЗОПАСНОГО МАРШРУТА ПУТЕШЕСТВИЯ С ПОМОЩЬЮ ОБЪЕДИНЕНИЯ НАВИГАЦИОННОГО ДАТЧИКА ВНУТРИ СУДНА И ИНФОРМАЦИИ ОБ ИЗОБРАЖЕНИИ) с приоритетом от 02.11.2018. Известное решение раскрывает, объединение данных бортового навигационного датчика и информации изображения, передачу данных на блок управления, прогнозирование риска столкновения и оценка прогнозируемой точки столкновения в соответствии с информацией об азимуте и расстоянии до другого судна с помощью системы безопасного навигационного управления и на основании информации с датчика положения, установленного на другом корабле, предупреждение о столкновении, и разработку пути обхода.
Недостатком данного решения является невозможность определения в воде во время движения маломерного судна малогабаритных объектов, имеющих малый видимый над поверхностью воды силуэт и большую незаметную часть под поверхностью, по характерным оптическим искажениям, возникающим при их обтекании водой, затопленные деревья, доски и т.д. предупреждения и предотвращения столкновения. Обязательное наличие на определяемом объекте заранее установленного блока автоматической идентификации. Невозможность определения объектов по характерным оптическим искажениям, возникающим при их обтекании водой.
Задачей заявленного решения является разработка способа обнаружения в воде во время движения маломерного судна малогабаритных объектов, имеющих малый видимый над поверхностью воды силуэт и большую незаметную часть под поверхностью, по характерным оптическим искажениям, возникающим при их обтекании водой, затопленные деревья, доски и т.д. предупреждения и предотвращения столкновения. Также разработка системы для осуществления способа.
Для решения поставленной задачи разработана система фиг. 2 включающая взаимосвязанные между собой, блок видеокамер (1), блок управления (2) с установленным программным обеспечением, например, в виде персонального устройства связи и/или дисплей с системным блоком, блок оповещения, в частном случае блок управления и связи с мотором (3).
В частном случае исполнения система, может включать связанные с блоком управления ИК(инфракрасный) - прожектор и/или УЗ(ультразвуковой) - датчики для уклонения на очень коротких дистанциях (десятки сантиметров) (на изображениях не показаны).
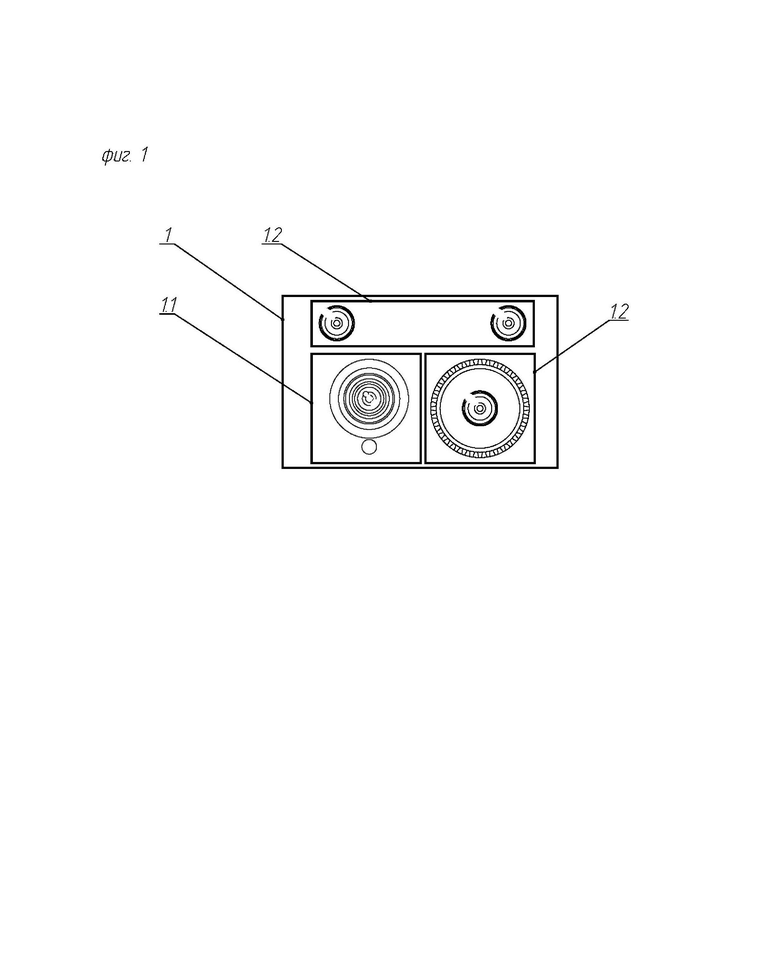
Блок видеокамер (1) фиг. 1 включает монокулярную камеру (1.1) с регулируемым фокусом для дальней идентификации, стереокамеру (1.2) для определения точной дистанции и широкоугольную камеру (1.3) для поиска объектов. В частном случае может быть дополнен тепловизором (на изображениях не показаны) связанный с блоком управления. Тепловизор направлен на отнесение обнаруженного объекта к живым или не живым. В качестве живого объекта может выступать:
- человек, плывущий или лежащий на воде отдыхая лицом вверх;
- птица, это в основном чайки, утки, реже гуси;
- животные, лоси, олени, медведи, крокодилы, и т.д.
Следует заметить, что в случае, когда человек лежит на воде лицом в верх, визуально он приближен к коряге или бревну, т.е. к неживому предмету.
Также в систему внесены следующие действия: при обнаружении тела погибших людей и животных в рамках заявленного решения приравнивают к неживым объектам и дальнейшие действия системы осуществляют как для неживых объектов; при обнаружении птиц в системе установлено - исключение и система не предпринимает никаких действий.
Блок оповещения связанный с блоком управления включает в себя световые и/или звуковые элементы оповещения.
Блок управления и связи с мотором (3) связанный с блоком управления (2) и управляет работой мотора. Связь между элементами системы, может быть проводная и/или беспроводная.
Блок управления (2) выполнен с возможностью обработки данных полученных из блока видеокамер (1), принятия решения по результатам обработки, и выполнения действий в зависимости от полученного результата.
Способ обнаружения предметов в воде для маломерного судна включает съемку поверхности воды монокулярной камерой, стереокамерой, широкоугольной камерой, с постоянной передачей данных съемки на блок управления (2) с установленным программным обеспечением, обработку данных, принятия решения по результатам обработки, и выполнения действий в зависимости от полученного результата, например, сигнализацию на блоке, светом и/или светом, и/или звуком, отображение на дисплее данных о координатах обнаруженных малогабаритных объектов (4), траекторию обхода.
В частном случае исполнения на этапе принятия решения происходит самообучение. Процесс подразумевает сбор данных об успешных и неудачных попытках распознавания потенциально опасных объектов с последующей автоматической их классификацией и автоматизированным нахождением новых признаков, уменьшающих такие ошибки с использованием интеллектуальных алгоритмов, например нейронных сетей.
Способ дополнительно включает работу ИК-прожектора и/или УЗ-датчиков и/или тепловизора и передачу полученных с них данных на блок управления (2) с дальнейшей обработкой данных и принятия по результатам обработки решением и т.д.
В частном случае способ дополнительно включает возможность автоматического снижения скорости, или полной остановки двигателя мотора (3) маломерного судна (5) фиг. 2.
В результате достигается обнаружение малогабаритных предметов, сигнализирование и предотвращения столкновения.
Краткое описание поясняющих материалов:
фиг. 1 - схематичное изображение блока видеокамер;
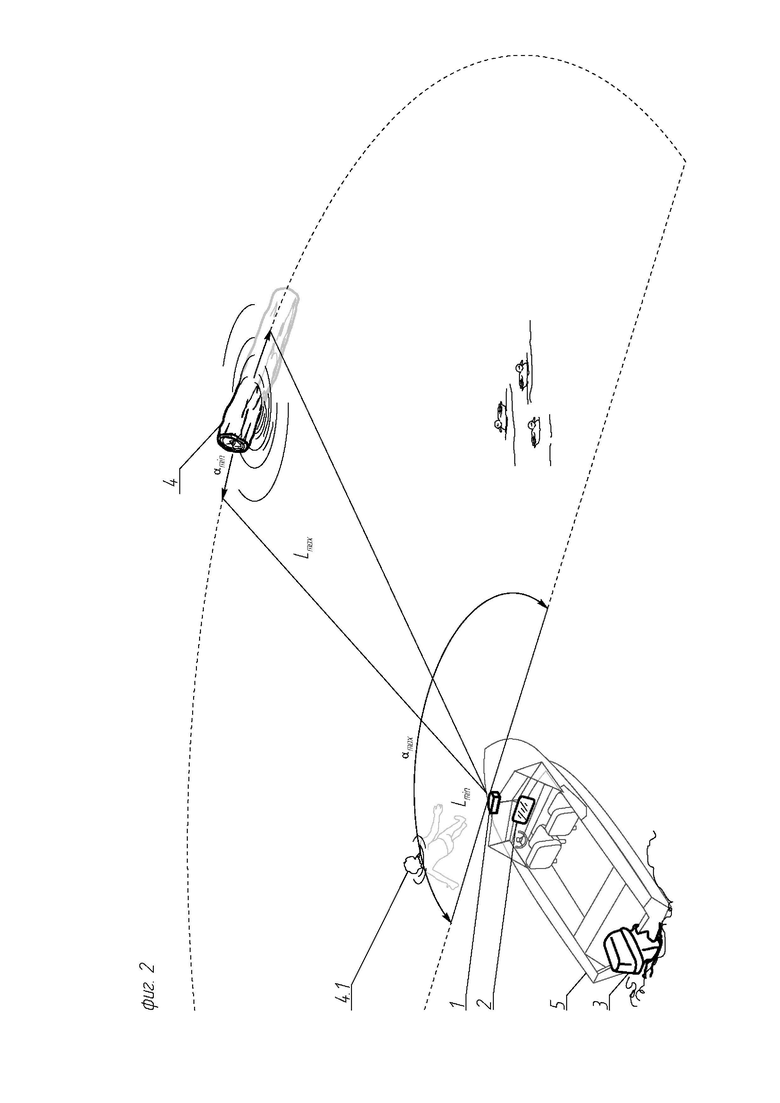
фиг. 2 - схематичное изображение процесса обнаружения малогабаритных предметов в воде.
Краткое описание конструктивных элементов.
1 - блок видеокамер;
1.1 - монокулярная камера;
1.2 - стереокамера;
1.3 - широкоугольная камера;
2 - блок управления;
3 - мотор;
4 - малогабаритный предмет;
4.1 - человек;
5 - маломерное судно.
Осуществление и примеры реализации изобретения.
На маломерное судно, например, катер устанавливают элементы заявленной системы, а именно взаимосвязанные между собой, блок видеокамер (1), блок управления (2) с установленным программным обеспечением, например, в виде персонального устройства связи и/или дисплей с системным блоком, блок оповещения, в частном случае блок управления и связи с мотором (3). Приводят систему в рабочее состояние и выходят на воду. В процессе нахождения на воде производят съемку поверхности воды монокулярной камерой, стереокамерой, широкоугольной камерой, с постоянной передачей данных съемки на блок управления (2) с установленным программным обеспечением, обработку данных, принятия решения по результатам обработки, и выполнения действий в зависимости от полученного результата, например, сигнализацию на блоке, светом и/или светом, и/или звуком, отображение на дисплее данных о координатах обнаруженных малогабаритных объектов (4), траекторию обхода.
Так, например, в зону видимости указанных камер попадает плохо видимый над поверхностью воды силуэт (4.1). При обработке данных, полученных с камер, распознают его наличие, по характерным оптическим искажениям, возникающим при их обтекании водой, например, прерывание волн, иные волны с меньшей высотой, чем большинство волн на поверхности воды. Подается сигнализация на блоке оповещения, светом и/или светом, и/или звуком, о также отображение на дисплее данных о координатах обнаруженного малогабаритного объекта (4), (4.1), траекторию обхода.
В случае наличия тепловизора, тепловизором определяют, живой объект или нет. Если это человек или животное, подается сигнализация на блоке оповещения, светом и/или светом, и/или звуком, о также отображение на дисплее данных о координатах обнаруженного малогабаритного объекта (4), (4.1), траекторию обхода. Если это птица, то система ее игнорирует, так как изначально птицы поставлены в исключение.
В частном случае исполнения на этапе принятия решения происходит самообучение.
В частном случае способ дополнительно включает работу ИК-прожектора и/или УЗ-датчиков и/или тепловизора и передачу полученных с них данных на блок управления (2) с дальнейшей обработкой данных и принятия по результатам обработки решением и т.д.
В частном случае если способ дополнительно включает возможность автоматического снижения скорости, или полной остановки двигателя мотора (3) маломерного судна (5) фиг. 2, то система автоматически снижает скорость или полностью останавливается, например, для оказания помощи человеку, оказавшемуся более чем 100 м от берега, или как минимум выяснения нужна ли ему помощь. При невозможности оказать помощь система передает координаты объекта на береговые службы.
Для совершенствования работы системы посредством обновлений и загрузки собранных данных об успешных и неудачных попытках обнаружения опасных объектов, она может быть подключена к сети интернет, однако присутствует возможность обмена информацией с использованием сменных носителей.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ТРАНСПОРТНЫХ СРЕДСТВ С ЭЛЕКТРОПРИВОДОМ | 2022 |
|
RU2789153C1 |
| СИСТЕМА ПРЕДОТВРАЩЕНИЯ НАЕЗДА НА ЧЕЛОВЕКА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2024 |
|
RU2833262C1 |
| Малогабаритный телеуправляемый подводный аппарат | 2021 |
|
RU2775894C1 |
| КОМПЛЕКС РАСПРЕДЕЛЕННОГО УПРАВЛЕНИЯ ИНТЕЛЛЕКТУАЛЬНЫМИ РОБОТАМИ ДЛЯ БОРЬБЫ С МАЛОГАБАРИТНЫМИ БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2019 |
|
RU2717047C1 |
| Система аэромониторинга залежек морских животных | 2015 |
|
RU2609728C1 |
| Роботизированный комплекс контроля линий электропередач и электроподстанций. | 2021 |
|
RU2748134C1 |
| СИСТЕМА ОБЕСПЕЧЕНИЯ КОМПЛЕКСНОЙ БЕЗОПАСНОСТИ НА ВОДНЫХ ОБЪЕКТАХ | 2022 |
|
RU2796646C1 |
| КОМПЛЕКТ ПЕРСОНАЛЬНОГО НАВИГАЦИОННОГО ОБОРУДОВАНИЯ ДЛЯ МАЛОМЕРНЫХ СУДОВЫХ ПЛАВСРЕДСТВ | 2014 |
|
RU2584920C1 |
| Оптико-электронная система преобразования данных изображения в элементы вектора состояния судна | 2023 |
|
RU2808873C1 |
| Способ обнаружения несанкционированного сброса сточных вод в речной водоток с применением тепловизионного оборудования | 2024 |
|
RU2831517C1 |
Изобретение относится к судостроению. Способ обнаружения предметов в воде для маломерного судна включает съемку поверхности воды монокулярной камерой, стереокамерой, широкоугольной камерой, постоянную передачу данных съемки на блок управления, с установленным программным обеспечением, обработку данных, принятие решения по результатам обработки, и сигнализацию на блоке, светом или светом и звуком, отображение на дисплее данных о координатах обнаруженных малогабаритных объектов, траекторию обхода. Также заявлена система обнаружения предметов в воде для маломерного судна, включающая взаимосвязанные между собой блок видеокамер, при этом как минимум одна из них стереокамера, блок управления с установленным программным обеспечением, блок оповещения. Блок видеокамер дополнительно включает монокулярную камеру с регулируемым фокусом и широкоугольную камеру, а блок управления, с установленным программным обеспечением, выполнен в виде персонального устройства связи и/или в виде дисплея с системным блоком. Технический результат - обеспечение обнаружения малогабаритных предметов, сигнализирование и предотвращение столкновений. 2 н. и 7 з.п. ф-лы, 2 ил.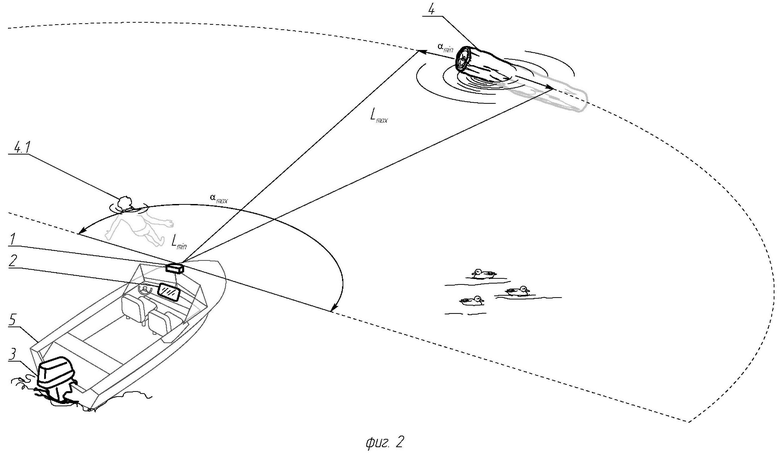
1. Способ обнаружения предметов в воде для маломерного судна, включающий съемку группой камер, при этом как минимум одна из них стереокамера, передачу данных съемки на блок управления с установленным программным обеспечением, обработку данных, принятие решения по результатам обработки, сигнализацию, отличающийся тем, что осуществляют съемку поверхности воды монокулярной камерой, стереокамерой, и широкоугольной камерой, передачу данных съемки на блок управления осуществляют постоянно, сигнализацию на блоке осуществляют светом или светом и звуком, отображают на дисплее данные о координатах обнаруженных малогабаритных объектов, траекторию обхода.
2. Способ по п. 1, отличающийся тем, что на этапе принятия решения осуществляют самообучение блока управления в виде сбора данных об успешных и неудачных попытках распознавания потенциально опасных объектов, последующая их классификация и нахождение новых признаков.
3. Способ по п. 1, отличающийся тем, что включает работу тепловизора или ИК-прожектора и тепловизора, или УЗ-датчиков и тепловизора, или ИК-прожектора и УЗ-датчиков и тепловизора, и передачу полученных с них данных на блок управления.
4. Способ по п. 1, отличающийся тем, что по результатам обработки снижают скорость, или полностью останавливают двигатель мотора маломерного судна.
5. Система обнаружения предметов в воде для маломерного судна для осуществления способа по п. 1, включающая взаимосвязанные между собой блок видеокамер, при этом как минимум одна из них стереокамера, блок управления с установленным программным обеспечением, блок оповещения, отличающаяся тем, что блок видеокамер дополнительно включает монокулярную камеру с регулируемым фокусом и широкоугольную камеру, блок управления, с установленным программным обеспечением, выполнен в виде персонального устройства связи и/или в виде дисплея с системным блоком.
6. Система по п. 5, отличающаяся тем, что дополнительно включает блок управления и связи с мотором, выполненный с возможностью снижения скорости или полной остановки двигателя мотора маломерного судна.
7. Система по п. 5, отличающаяся тем, что блок управления выполнен с возможностью самообучения в виде сбора данных об успешных и неудачных попытках распознавания потенциально опасных объектов, последующей их классификацией и нахождением новых признаков.
8. Система по п. 5, отличающаяся тем, что дополнительно включает тепловизор, связанный с блоком управления.
9. Система по п. 5, отличающаяся тем, что блок оповещения, связанный с блоком управления, включает в себя световые и/или звуковые элементы оповещения.
| CN 204215036 U, 18.03.2015 | |||
| KR 0101987846 B1, 11.06.2019 | |||
| KR 2020050808 A, 12.05.2020 | |||
| CN 108764218 A, 06.11.2018 | |||
| US 20170349174 A1, 07.12.2017 | |||
| KR 102223363 B1, 05.03.2021 | |||
| KR 102249156 B1, 07.05.2021 | |||
| CN 107330377 A, 07.11.2017. |

