Изобретение относится к области экологического мониторинга, в частности, к устройствам обнаружения, оценки численности и размерно-возрастного состава популяции тюленей.
Известно, что использование традиционных методов учета морских животных связано с большими временными и трудовыми затратами.
Современные методы учета с применением комплексных автоматизированных систем стали важным элементом дистанционного мониторинга и позволяют получать все более достоверные сведения. [Черноок В.И., Васильев А.Н., Мелентьев В.В., Глазов Д.М. Опыт использования самолета-лаборатории Л-410 для инструментальных авиаучетов морских млекопитающих. - Морские млекопитающие Голарктики. - Сборник научных трудов, 2008, Одесса].
Известен способ дистанционного определения размерно-возрастного состава представителей семейства настоящие тюлени по патенту РФ №2279798 на изобретение, МПК A01K 67/02, G01V 8/00, публикация 20.07.2006 г.
Способ включает получение снимков и сопутствующей им навигационной информации, компьютерную обработку снимков, привязку координат, скорости и высоты полета, времени срабатывания затвора и параметров настройки фотоаппарата, просмотр фотоснимков, отбраковку изображений в неподходящем для измерения длины тела положении, расчет корректирующего коэффициента.
Известен также способ подсчета теплокровных животных с летательного аппарата по патенту РФ №2193308 на изобретение, МПК A01K 67/02, G01V 8/00, публикация 27.11.2002.
Способ предусматривает синхронное использование наряду с инфракрасной и видеосъемкой в широкой полосе обзора видеосъемку высокого разрешения в узкой полосе обзора. По результатам этих одновременных съемок проводят подсчет тепловых пятен на инфракрасных снимках и контрастных животных на видеоснимках, выполненных в широкой полосе обзора.
Недостатком этих способов является то, что съемка осуществляется с применением самолет-лаборатории типа АН-26 «Арктика» на высоте более 150 метров, что значительно сужает возможности авиасъемки, из-за больших скоростей, ограничений по высоте полета, отсутствия возможности оперативно изменять полетное задание в процессе съемки, возможности зависания на месте, ограниченного количества траекторий (галсов).
Также существенным недостатком способов является отсутствие оперативности в проведении исследований, снимки отбираются ручным способом, после чего просматриваются и отбраковываются по итогам проведения съемки, что исключают возможность повторного точечного мониторинга места (области) с интересующими координатами, в коротком временном интервале, с возможностью оперативно изменять летные параметры, а также параметры настройки съемочной аппаратуры.
Наиболее близким по технической сущности аналогом, принятым за прототип предлагаемого изобретения, является способ локального аэромониторинга геотехнических систем и бортовой комплекс для его осуществления по патенту РФ №2227271, МПК G01C 11/00, публикация 20.04.2004 г.
Комплекс по прототипу содержит блок аэровизуального наблюдения объекта съемки на базе курсовой и съемочной камер, блок управления полетом по плану местности, снабженный бортовыми компьютерами и системой определения навигационных данных на базе GPS-приемника, а также датчики углов поворота камер. Блок аэровизуального наблюдения соединен с блоком управления полетом с возможностью синхронного позиционирования на видеомониторах информации от обеих камер. В штатном режиме съемки съемочная камера установлена на неподвижном кольце демпфирующей платформы так, что оптические оси обеих камер лежат в плоскости, проходящей через продольную ось летательного аппарата и линию съемочного галса. При режиме ветрового воздействия съемочная камера установлена на поворотном кольце, расположенном коаксиально неподвижному основанию, и развернута на угол компенсации угла ветрового воздействия.
Недостатком устройства по прототипу являются ограниченные возможности маневрирования, изменения полетного задания и быстрого возвращения в нужную точку для повторной съемки из-за больших скоростей, ограничений по высоте полета.
Техническим результатом предлагаемого изобретения является повышение оперативности и достоверности результатов аэромониторинга залежек морских животных.
Для достижения заявленного технического результата предлагается в качестве носителя бортовой аппаратуры использовать беспилотный летательный аппарат (БЛА) судового базирования, дополнительно оснащенный бортовым блоком связи, который связан радиоканалом с судовым блоком связи судовой аппаратуры управления полетом и обработки результатов мониторинга, представляющей собой автоматизированную систему с вычислительно-управляющим блоком, работающим с базами данных исследуемых объектов, алгоритмами обработки изображений и выдающим команды на БЛА по изменению полетного задания, корректировке параметров и положения аппаратуры мониторинга.
Сущность изобретения заключается в том, что в системе аэромониторинга, содержащей бортовой блок устройств фото-видеосъемки и бортовой блок управления полетом, выполненный с возможностью формирования сигналов управления механизмами подвеса устройств фото-видеосъемки, в состав бортовой аппаратуры, размещенной на беспилотном летательном аппарате (БЛА) судового базирования, дополнительно введен бортовой блок связи, соединенный с бортовым блоком управления полетом и бортовым блоком устройств фото-видеосъемки и взаимодействующий по радиоканалу с судовым блоком связи, входящим в состав судовой аппаратуры управления полетом и обработки результатов мониторинга, которая содержит пульт управления, соединенный с вычислительно-управляющим блоком, блок навигации и расчета полетного задания (ПЗ), блок формирования команд управления БЛА, блок внешних данных, соединенный с входом данных метеоусловий и данных местоположения судна вычислительно-управляющего блока, блок форматирования, обработки и распознавания объектов, вход которого соединен с выходом данных фото-видеосъемки судового блока связи, а выход соединен с первым входом блока агрегации информации о распознаваемых объектах, второй вход которого соединен с выходом телеметрических данных вычислительно-управляющего блока, а выход подключен к входу блока формирования базы данных и отчетов и к соответствующему входу вычислительно-управляющего блока, при этом вход загрузки ПЗ блока навигации и расчета ПЗ соединен с соответствующим выходом вычислительно-управляющего блока, а выход соединен с входом блока анализа ПЗ блока формирования команд управления БЛА, в состав которого входят также вычислитель управляющих команд и блок анализа выполнения ПЗ, вход которого соединен с выходом данных телеметрии судового блока связи, а выход соединен с входами данных телеметрии блока навигации и расчета ПЗ и вычислительно-управляющего блока, выход вычислителя управляющих команд подключен к входу судового блока связи, а его вход соединен со вторым выходом блока анализа ПЗ, первый выход которого соединен с соответствующим входом вычислительно-управляющего блока.
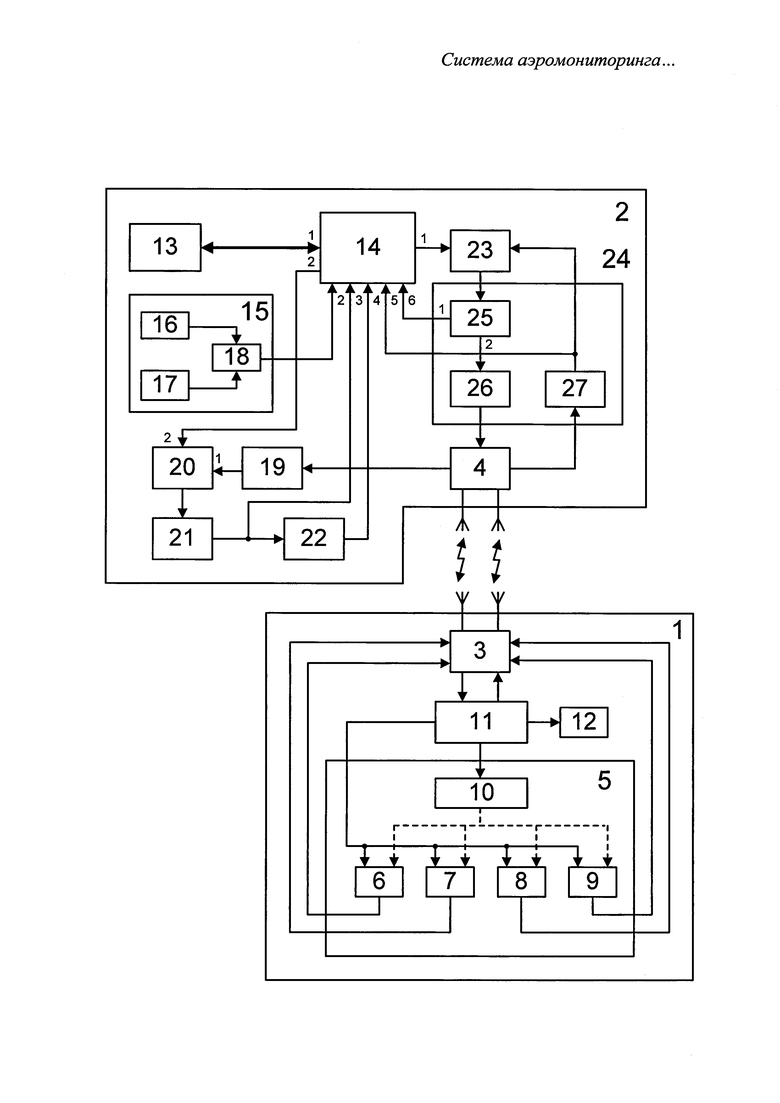
Сущность изобретения поясняется чертежом структурно-функциональной схемы системы аэромониторинга, на котором обозначены:
1 - бортовая аппаратура,
2 - судовая аппаратура управления полетом и обработки результатов мониторинга,
3 - бортовой блок связи,
4 - судовой блок связи,
5 - блок устройств фото-видеосъемки,
6 - фотокамера, например, марки Canon DX-1,
7 - тепловизор, например, марки «Малахит»,
8 - широкоформатная видеокамера, например, марки TK880E 6°,
9 - узкоформатная видеокамера, например, марки JVC 25°,
10 - блок механизмов управления подвесами устройств фото-видеосъемки,
11 - блок управления полетом, выполненный в виде автопилота, например, марки АП-05,
12 - блок исполнительных механизмов управления БЛА (рули, дроссели),
13 - пульт управления, выполненный на базе персонального компьютера со средствами ввода данных и монитором,
14 - вычислительно-управляющий блок,
15 - блок внешних данных,
16 - судовая метеорологическая система,
17 - судовая навигационная система,
18 - блок сопряжения,
19 - блок форматирования, обработки и распознавания объектов,
20 - блок агрегации информации о распознаваемых объектах,
21 - блок формирования базы данных и отчетов
22 - накопитель базы данных,
23 - блок навигации и расчета полетного задания,
24 - блок формирования команд управления БЛА,
25 - блок анализа полетного задания,
26 - вычислитель управляющих команд,
27 - блок анализа выполнения полетного задания.
Система аэромониторинга залежек морских животных содержит бортовую аппаратуру 1, размещенную на беспилотном летательном аппарате (БЛА) судового базирования, и судовую аппаратуру 2 управления полетом и обработки результатов мониторинга, которые взаимодействуют между собой посредством радиоканала при использовании бортового и судового блоков 3, 4 связи.
Бортовая аппаратура 1 содержит блок 5 устройств фото-видеосъемки, в состав которых входят фотокамера 6, тепловизор 7 и две видеокамеры 8, 9 различного формата, закрепленные на подвесах, которые кинематически связаны с соответствующими механизмами блока 10 механизмов управления подвесами. Сигналы управления механизмами блока 10 и исполнительными механизмами блока 12 исполнительных механизмов управления БЛА (рули, дроссели), а также сигналы, задающие режимы работы устройств 6, 7, 8, 9 фотовидеосъемки, формируются на соответствующих выходах блока 11 управления полетом.
Блок 11 управления полетом выполнен в виде автопилота, например, типа АП-05, оснащенного микропроцессором 400 MPS, блоками памяти, драйверами последовательных интерфейсов, приемником спутниковой радионавигационной системы ГЛОНАСС/GPS и двухчастотным приемником с фазовыми измерениями, который взаимодействует с бортовым блоком 3 связи.
Блоки 3, 4 связи используют отдельные частотно разделенные каналы радиосвязи для независимой передачи данных в/из блока 11 управления полетом и данных, поступающих из блока 5 устройств фото-видеосъемки. Одним из возможных примеров реализации блоков 3,4 связи является высокоскоростная цифровая система передачи информации РМ-12/14, работающая в диапазоне рабочих частот 2400-2483 МГц с возможностью оценки вероятности битовой ошибки для каждого канала связи, перераспределения потоков, комплексирования каналов, работающих в разных частотных диапазонах.
Судовая аппаратура 2 управления полетом и обработки результатов мониторинга содержит пульт 13 управления, оснащенный средствами ввода данных и монитором, соединенный с первым входом-выходом вычислительно-управляющего блока 14, выполненного на базе многоядерной вычислительной машины высокой производительности, а также блок 15 внешних данных, блок 19 форматирования, обработки и распознавания объектов, вход которого соединен с выходом данных фото-видеосъемки судового блока 4 связи, а выход соединен с первым входом блока 20 агрегации информации о распознаваемых объектах.
Второй вход блока 20 агрегации информации о распознаваемых объектах соединен со вторым выходом (телеметрических данных) вычислительно-управляющего блока 14, а выход соединен с входом блока 21 формирования базы данных и отчетов, выход которого соединен с входом накопителя 22 базы данных и с третьим входом вычислительно-управляющего блока, четвертый вход которого соединен с выходом накопителя 22.
В состав блока 15 внешних данных входят судовая метеорологическая станция 16 и судовая навигационная система 17, соединенные с блоком 18 связи, выход которого подключен ко второму входу (данных метеоусловий и данных местоположения судна) вычислительно-управляющего блока 14.
Первый выход вычислительно-управляющего блока 14, на котором формируются данные полетного задания, соединен с входом загрузки полетного задания блока 23 навигации и расчета полетного задания, вход данных телеметрии которого и одноименный вход вычислительно-управляющего блока 14 соединены с выходом блока 27 анализа выполнения полетного задания, входящего вместе с блоком 25 анализа полетного задания и вычислителем 26 управляющих команд в состав блока 24 формирования команд управления БЛА.
Вход блока 25 анализа полетного задания соединен с выходом блока 23 навигации и расчета полетного задания, а его первый и второй выходы соединены соответственно с шестым входом вычислительно-управляющего блока 14 и входом вычислителя 26 управляющих команд, выход которого соединен с входом судового блока 4 связи, выход данных телеметрии которого соединен с входом блока 27 анализа выполнения полетного задания.
Система работает следующим образом.
Ввод в систему данных о предполагаемых объектах поиска и области исследования производится оператором пульта 13 управления, выполненного на базе персонального компьютера стандартной конфигурации. Задаются критерии распознавания объектов, набор параметров для заполнения базы данных, уточняется набор параметров, которые будут выведены на дисплей в сформированном отчете о выполнении задания.
Вычислитель пульта 13 управления формирует задачу поиска и распознавания объектов и загружает программный пакет в вычислительно-управляющий блок 14 для выработки сценария полетного задания, которым является формализованное описание упорядоченной по времени последовательности решения объектом ненулевого количества частных задач.
Каждая из частных задач, входящих в состав сценария, включает идентификатор, определяющий содержание задачи: начальный и конечный срок выполнения задачи, скорость движения, режим использования бортовых средств обнаружения, произвольное количество трехмерных координат поворотных точек, обозначающих маршрут движения или границы района действий.
Вычислительно-управляющий блок 14, выполненный на базе многоядерной вычислительной машины высокой производительности, концентрирует или разделяет информационные потоки, в зависимости от условий задачи и параметров ее выполнения. Программно-математическое обеспечение вычислительно-управляющего блока содержит основные правила и законы работы системы оперативного точечного мониторинга, по которым происходит изменение полетного задания.
Выработка сценария в вычислительно-управляющем блоке 14 происходит с учетом информации, получаемой из блока 15 внешних данных. Данный блок содержит в себе судовую метеорологическую станцию 16, формирующую таблицу метеоусловий, состоящую из температуры воздуха окружающей среды, типа осадков, количества осадков, силы и направления ветра, в текущий момент, а также прогнозируемых метеоусловий на заранее заданный временной интервал.
Кроме формирования таблиц метеоусловий блок 15 внешних данных непрерывно передает в вычислительно-управляющий блок 14 информацию судовой навигационной системы 17 о местоположении судна, определяемом через спутниковые системы Глонасс, GPS, скорости судна, а также его курсе.
Передача массивов блока 15 внешних данных происходит через блок 18 сопряжения, который производит слияние информации от судовых систем, в единый массив, выполняет форматирование массива и циклично передает его в вычислительно-управляющий блок.
На этапе предстартового формирования маршрута вычислительно-управляющий блок 14 анализирует метеообстановку и положение судна совместно с заданием оператора. Анализ происходит методом сравнения массива, полученного из блока 15, с массивом критических значений. В случае достижения по любому из пунктов массива критического значения, вычислительно-управляющий блок блокирует дальнейший расчет полетного задания и предлагает оператору изменить исходные данные для формирования задачи или дождаться улучшения критериев, полученных от блока 15 внешних данных.
Если критерии находятся в рамках допустимых значений, вычислительно-управляющий блок 14 передает исходные данные задачи совместно с массивом блока 15 в вычислитель блока 23 навигации и расчета полетного задания. Работа вычислителя полетного задания сводится к созданию оптимальной траектории движения БЛА, необходимой и достаточной для выполнения поставленной оператором задачи. Производится расчет минимальной длины траектории, необходимой для выполнения полетного задания, с учетом обеспечения полного сканирования исследуемой области для наблюдающей аппаратуры, а также с учетом факторов метеорологической обстановки, которые требуют перерасчета траектории движения носителя с поправкой на силу и направление ветра.
Сформированная траектория записывается в программный файл полетного задания, архивируется и передается в блок 25 анализа полетного задания блока 24 формирования команд управления БЛА. Анализ полетного задания сводится к проверке сформированного маршрута и его сценария по ключевым критериям, составленным с использованием аппарата нечеткой логики, где значения факторов задаются не дискретным значением, а диапазоном - нечетким множеством.
К таким критериям, в частности, относятся:
- время полетного задания не должно превышать 2/3 максимального времени полета носителя;
- технические параметры наблюдающей аппаратуры. Определяются возможностью получения информации надлежащего качества при выполнении сформированного полетного задания;
- метеорологические критерии. Определяются рекомендованными производителями условиями эксплуатации;
- максимальная «глубина» исследования. Определяется техническими параметрами приемо-передающего оборудования связи с БЛА.
Ключевые критерии можно разделить на 3 группы. К первой группе относятся критерии с критическими значениями, система принимает решение о невозможности выполнения полетного задания, создает отчет о причинах невозможности выполнения, который передается в вычислительно-управляющий блок 14, и через него на пульт 13 управления, где отображается на дисплее.
Ко второй группе относятся критерии, принимающие не критические значения. В этом случае, блоком 25 анализа ПЗ принимается решение о возможности выполнения полетного задания, но с уведомлением оператора, выводом отчета с перечнем параметров с не критическими значениями и рекомендациями по изменению исходных параметров для полетного задания.
По результатам анализа выполнимости полетного задания в случае получения «не критического» или «критического» значения критерия, вычислительно-управляющий блок 14 предложит произвести дополнительный ввод данных по частной задаче или предложит возможность частичного удаления данных, снятия задачи.
К третьей группе относятся значения критериев, которые соответствуют оптимальным, в таком случае блоком 25 анализа полетного задания принимается решение о возможности его выполнения в автоматическом режиме, и сформированное ПЗ направляется в вычислитель 26 управляющих команд.
Вычислитель 26 управляющих команд производит перерасчет ПЗ с учетом требований блока 11 управления полетом (автопилота АП-05), установленного на БЛА. Вычислитель управляющих команд формирует файл прошивки для блока 11 автопилота, который передается по радиоканалу через блоки 4, 3 связи.
Блоки связи, обеспечивающие передачу большого объема данных при заданных требованиях полосы пропускания и вероятности битовой ошибки, используют отдельные частотно разделенные радиолинии связи для независимой передачи данных от вычислителя 26 управляющих команд и, в обратном направлении, данных из блока 5 устройств фотовидеосъемки и телеметрических данных из блока 11 управления полетом. Блоки связи выполнены с учетом совместимости приемопередающего оборудования. В процессе работы блок связи оценивает вероятность битовой ошибки для каждого канала связи и перераспределяет поток комплексированием нескольких каналов связи, работающих в разных частотных диапазонах. Для обеспечения бесперебойной работы блоков связи на судне установлена антенна с большим коэффициентом направленного действия, установленная на опорно-поворотном устройстве, работающем совместно с системой слежения за БЛА.
Блок 11 управления полетом представляет собой известную систему АП-05 для беспилотных летательных аппаратов. Данная система осуществляет управление бортовым сегментом комплекса БЛА и предназначена для выполнения навигационной задачи. Автопилот позволяет выполнять полетное задание с автоматическим регулированием каналов тангажа, крена, курса, высоты и скорости. Прошивка системы автопилота осуществляется через радиоканал информационного взаимодействия по протоколам с использованием адаптивного комплексирования средствами блоков 3, 4 связи.
Программное обеспечение автопилота АП-05 функционирует на базе операционной системы реального времени QNX Neutrino, имеет модульную отказоустойчивую открытую архитектуру, что позволяет интегрировать собственное программное обеспечение с гарантией безопасности со стороны системы.
Через блок 11 автопилота происходит управление положением полезной нагрузки путем подачи сигналов в блок 10 механизмов управления подвесами устройств фотовидеосъемки, а также управление настройкой устройств 6, …,9 фото-видеосъемки. Система позволяет производить независимое включение/выключение съемочной единицы аппаратуры, а также менять режим ее работы. Возможности устройства автопилотирования позволяют произвести его интеграцию в кластер с высокопроизводительным вычислительно-управляющим блоком 14, и автоматизировать решение задач определения численности и размерно-возрастного состава животных.
Приняв полетное задание, блок 3 связи передает его в автопилот 11, который, в свою очередь, выдает управляющие сигналы в блок 12 исполнительных механизмов управления БЛА (рулевые механизмы и дроссели), а также в блок 10 механизмов управления подвесами устройств фото-видеосъемки для обеспечения необходимого положения съемочной аппаратуры. Управление происходит через подачу управляющих сигналов от блока 11 автопилота на сервоприводы трех-осевых стабилизированных подвесов, которыми снабжены устройства 6,…, 9 фото-видеосъемки блока 5.
В процессе выполнения полетного задания через блоки связи 3, 4 осуществляется непрерывная передача в блок 27 анализа выполнения ПЗ телеметрических данных о местоположении БЛА и данных о параметрах настройки устройств фото-видеосъемки. Блок 27 анализа ПЗ производит контроль соответствия курса, местоположения, эшелона, полетному заданию, текущих технических параметров (запас хода, сообщения о неисправностях), контроле бортовых систем носителя, и положения съемочной аппаратуры, для обеспечения необходимого перекрывания съемки, заданного оператором в ПЗ. При достижении границы расхождения реальных параметров с заданным полетным заданием, блок 27 анализа выполнения ПЗ загружает текущие значения параметров носителя и аппаратуры мониторинга (данные телеметрии) в вычислительно-управляющий блок 14 и в приемник данных телеметрии блока 23 навигации и расчета полетного задания. Далее вычислитель блока 23 вырабатывает поправку полетного задания, которое проходит проверку и загрузку по описанному циклу предполетной подготовки.
Таким образом, в указанной последовательности осуществляется предстартовая подготовка ПЗ, его выполнение и оперативная корректировка.
Выполнение сценариев поиска, распознавания и определения параметров животных, системой аэромониторинга происходит с использованием блока 19 форматирования, обработки и распознавания объектов и блока 20 агрегации информации о распознаваемых объектах.
Поток данных фото-видео съемки из устройств 6, …, 9 блока 5, установленных на БЛА, через блоки 3, 4 связи передается на вход блока 19 форматирования, обработки и распознавания объектов. В процессе форматирования видеоизображения камер 8, 9 оцифровываются и разбиваются на отдельные снимки. Полученные снимки и фотографии фотокамеры 6 Canon DX-1 проходят предварительную графическую подготовку. Затем снимки загружаются в вычислитель блока 19, который производит отбор снимков по алгоритмам, соответствующим сценарию полетного задания. Набор алгоритмов, соответствующих различным сценариям задачи мониторинга, хранится в памяти вычислителя блока 19. Отобранные снимки загружаются в программу «Видеотест», которая производит определения длины тела животного в пикселях, далее производит преобразование длины тела по известной зависимости с учетом корректирующего коэффициента определения биологической длины измеряемых животных.
В блоке 20 агрегации информации о распознанных объектах к отобранным и обработанным снимкам через вычислительно-управляющий блок 14 добавляется телеметрическая информация (данные о параметрах съемочной аппаратуры и географических координатах БЛА), затем, по результатам привязки, пополняется таблица объектов, а в блоке 21 формирования базы данных и отчетов формируется текущий отчет о поиске, который поступает в вычислительно-управляющий блок 14 и далее отображается на дисплее пульта 13 управления.
Вся потоковая информация из блока 21 формирования базы данных и отчетов фиксируется в накопителе 22 базы данных.
Таким образом, предлагаемая система позволяет формировать и оперативно изменять полетное задание при необходимости более детального обследования обнаруженной залежки морских животных с целью распознавания, определения численности и размерно-возрастного состава особей.
При фиксации и распознавании интересующей особи, вычислительно-управляющий блок 14 может принимать самостоятельные решения о смене полетного задания, что позволяет повысить достоверность распознавания и определения размерно-возрастного состава животных. По итогам фиксации интересующего объекта блоком 14 выдается в блок 23 навигации и расчета команда и исходные данные по изменению полетного задания, предварительно сформированного для вероятностной ситуации, описанной набором критериев. Далее полетное задание проходит вышеописанный цикл проверки и возможности исполнения, вычислитель 26 управляющих команд вырабатывает параметры положения съемочной техники, формирует полетное задания для автопилота, передает в блок 4 связи, после чего бортовая аппаратура позволяет оперативно и достоверно зафиксировать интересующий объект.
Промышленная применимость изобретения определяется тем, что на основании материалов заявки предлагаемая система может быть изготовлена по известной в радиоэлектронике технологии при использовании известных комплектующих изделий и использована для мониторинга залежек морских животных.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ РОБОТИЗИРОВАННОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА В АВТОНОМНОМ РЕЖИМЕ | 2020 |
|
RU2733453C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА | 2011 |
|
RU2488775C1 |
| СПОСОБ КОМБИНИРОВАННОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2586399C2 |
| АВТОПИЛОТ ДЛЯ САМОЛЕТОВ МАЛОЙ АВИАЦИИ | 2024 |
|
RU2832351C1 |
| СИСТЕМА НАБЛЮДЕНИЯ ЗА ЗЕМНОЙ ПОВЕРХНОСТЬЮ С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2323851C1 |
| Система управления полётами, заходом на посадку и посадкой вертолетов для оборудования стартовых командных пунктов надводных кораблей и диспетчерских пунктов, размещаемых на судах и морских платформах | 2017 |
|
RU2667654C1 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА МНОГОФУНКЦИОНАЛЬНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2476920C1 |
| Способ и устройство противодействия беспилотным летательным аппаратам | 2023 |
|
RU2818398C1 |
| КОМПЛЕКС ВЗЛЕТА, ПИЛОТИРОВАНИЯ И ПОСАДКИ АВТОМАТИЗИРОВАННЫХ ВОЗДУШНЫХ СУДОВ | 2006 |
|
RU2376203C2 |
| Беспилотный летательный аппарат самолетного типа для обнаружения пропавшего человека | 2019 |
|
RU2723201C1 |
Изобретение относится к области приборостроения и может найти применение в системах аэромониторинга, обнаружения и оценки численности и размерно-возрастного состава популяции тюленей. Техническим результат - повышение оперативности и достоверности результатов аэромониторинга. Для этого в системе аэромониторинга, содержащей бортовой блок устройств фото-видеосъемки и бортовой блок управления полетом, выполненный с возможностью формирования сигналов управления механизмами подвеса устройств фото-видеосъемки, в состав бортовой аппаратуры, размещенной на беспилотном летательном аппарате (БЛА) судового базирования, дополнительно введен бортовой блок связи, соединенный с бортовым блоком управления полетом и бортовым блоком устройств фото-видеосъемки и взаимодействующий по радиоканалу с судовым блоком связи, входящим в состав судовой аппаратуры управления полетом и обработки результатов мониторинга, которая содержит пульт управления, соединенный с вычислительно-управляющим блоком, блок навигации и расчета полетного задания (ПЗ), блок формирования команд управления БЛА, блок внешних данных, соединенный с входом данных метеоусловий и данных местоположения судна вычислительно-управляющего блока, блок форматирования, обработки и распознавания объектов, вход которого соединен с выходом данных фото-видеосъемки судового блока связи, а выход соединен с первым входом блока агрегации информации о распознаваемых объектах, второй вход которого соединен с выходом телеметрических данных вычислительно-управляющего блока, а выход подключен к входу блока формирования базы данных и отчетов, и к соответствующему входу вычислительно-управляющего блока, при этом вход загрузки ПЗ блока навигации и расчета ПЗ соединен с соответствующим выходом вычислительно-управляющего блока, а выход соединен с входом блока анализа ПЗ блока формирования команд управления БЛА, в состав которого входят также вычислитель управляющих команд и блок анализа выполнения ПЗ, вход которого соединен с выходом данных телеметрии судового блока связи, а выход соединен с входами данных телеметрии блока навигации и расчета ПЗ и вычислительно-управляющего блока, выход вычислителя управляющих команд подключен к входу судового блока связи, а его вход соединен со вторым выходом блока анализа ПЗ, первый выход которого соединен с соответствующим входом вычислительно-управляющего блока. 1 ил.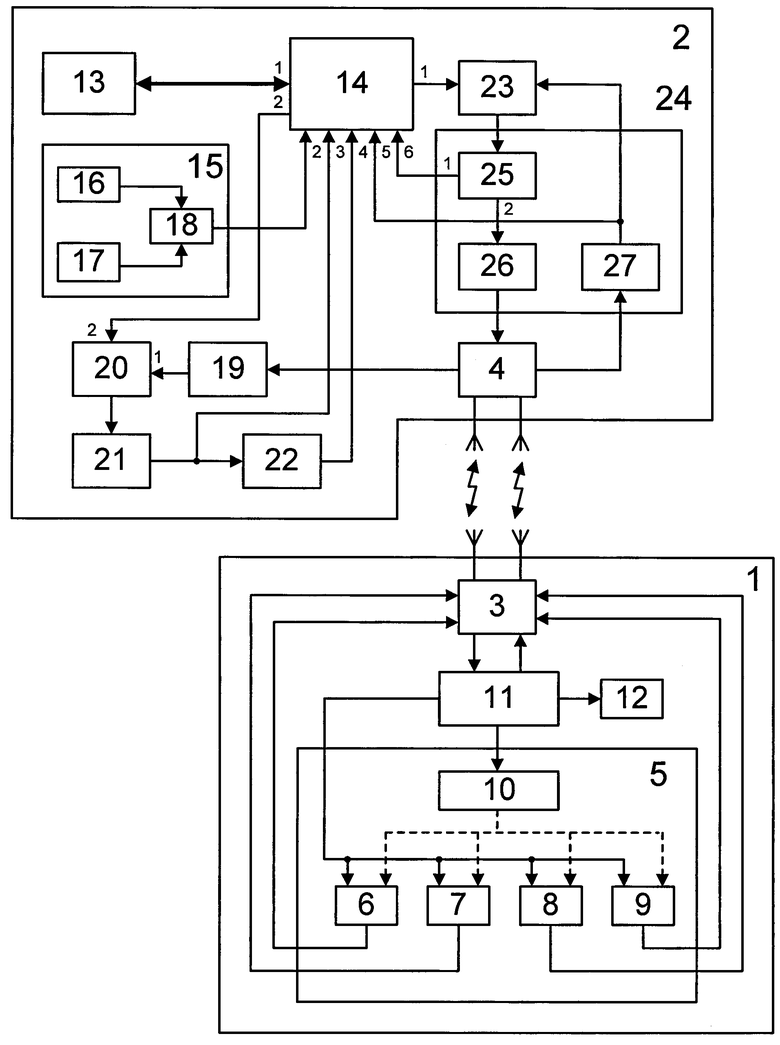
Система аэромониторинга, содержащая бортовой блок устройств фото-видеосъемки и бортовой блок управления полетом, выполненный с возможностью формирования сигналов управления механизмами подвеса устройств фото-видеосъемки, отличающаяся тем, что в состав бортовой аппаратуры, размещенной на беспилотном летательном аппарате (БЛА) судового базирования, дополнительно введен бортовой блок связи, соединенный с бортовым блоком управления полетом и бортовым блоком устройств фото-видеосъемки и взаимодействующий по радиоканалу с судовым блоком связи, входящим в состав судовой аппаратуры управления полетом и обработки результатов мониторинга, которая содержит пульт управления, соединенный с вычислительно-управляющим блоком, блок навигации и расчета полетного задания (ПЗ), блок формирования команд управления БЛА, блок внешних данных, соединенный с входом данных метеоусловий и данных местоположения судна вычислительно-управляющего блока, блок форматирования, обработки и распознавания объектов, вход которого соединен с выходом данных фото-видеосъемки судового блока связи, а выход соединен с первым входом блока агрегации информации о распознаваемых объектах, второй вход которого соединен с выходом телеметрических данных вычислительно-управляющего блока, а выход подключен к входу блока формирования базы данных и отчетов, и к соответствующему входу вычислительно-управляющего блока, при этом вход загрузки ПЗ блока навигации и расчета ПЗ соединен с соответствующим выходом вычислительно-управляющего блока, а выход соединен с входом блока анализа ПЗ блока формирования команд управления БЛА, в состав которого входят также вычислитель управляющих команд и блок анализа выполнения ПЗ, вход которого соединен с выходом данных телеметрии судового блока связи, а выход соединен с входами данных телеметрии блока навигации и расчета ПЗ и вычислительно-управляющего блока, выход вычислителя управляющих команд подключен к входу судового блока связи, а его вход соединен со вторым выходом блока анализа ПЗ, первый выход которого соединен с соответствующим входом вычислительно-управляющего блока.
| СПОСОБ ЛОКАЛЬНОГО АЭРОМОНИТОРИНГА ГЕОТЕХНИЧЕСКИХ СИСТЕМ И БОРТОВОЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2227271C1 |
| СИСТЕМА МОНИТОРИНГА И ЗАЩИТЫ ОТ МОРСКОЙ УГРОЗЫ | 2012 |
|
RU2549153C1 |
| Устройство для поперечного спуска судов | 1960 |
|
SU134154A1 |
| МЕЖДУНАРОДНАЯ АЭРОКОСМИЧЕСКАЯ СИСТЕМА ГЛОБАЛЬНОГО МОНИТОРИНГА (МАКСМ) | 2010 |
|
RU2465729C2 |
| Двухфазный детектор | 1950 |
|
SU92848A1 |

