ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Эта патентная заявка испрашивает приоритет европейской патентной заявки №19170690.2, поданной 23 апреля 2019 г., все раскрытие которой включено сюда путем ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к летательному аппарату, выполненному с возможностью вертикального взлета и посадки.
ИЗВЕСТНЫЙ УРОВЕНЬ ТЕХНИКИ
В авиационной промышленности со второй половины двадцатого века осознают необходимость в самолетах, выполненных с возможностью вертикального взлета и посадки и имеющих достаточно высокие крейсерские скорости, чтобы иметь способность преодолевать маршруты от средней до большой дальности за меньшее время.
Частичное решение этой необходимости образовано вертолетами и конвертопланами, которые, однако, не лишены недостатков.
Вертолеты фактически имеют максимальную скорость приблизительно 350 км/ч.
Конвертопланы в своей основе содержат:
- фюзеляж, продолжающийся вдоль первой оси; и
- пару крыльев, продолжающихся вдоль второй оси и поддерживающих соответственные двигатели, наклоняющиеся вокруг второй оси.
Конкретнее, конвертоплан принимает конфигурацию вертолета, когда двигатели расположены так, что соответственные третьи оси вращения перпендикулярны вышеупомянутым первой и второй осям.
В дополнение, конвертоплан принимает конфигурацию самолета, когда двигатели расположены так, что соответственные третьи оси параллельны первой оси.
В связи с тем, что необходимо наклонять двигатели вокруг второй оси для выполнения перехода между конфигурацией вертолета и конфигурацией самолета, конвертопланы особенно сложны с конструктивной точки зрения.
Дополнительное решение, предложенное для удовлетворения этой необходимости, образовано летательным аппаратом вертикального взлета и посадки (VTOL).
Последний имеет двигатели с ориентируемыми выхлопными соплами так, чтобы направлять результирующую тягу в вертикальном направлении во время взлета/посадки или в горизонтальном направлении во время горизонтального полета.
Несмотря на его распространение и эффективность, конструктивная конфигурация летательного аппарата VTOL является особенно сложной. Это происходит из-за того, что необходимо выборочно ориентировать направление тяги двигателей согласно состояниям взлета/посадки/полета летательного аппарата.
В связи с этим в отрасли осознают необходимость в летательных аппаратах вертикального взлета и посадки, которые имеют летные характеристики, сравнимые с конвертопланами и летательными аппаратами с ориентируемой тягой, и которые в то же время являются наименее сложными с конструктивной и эксплуатационной точки зрения и имеют минимально возможные веса и стоимости.
EP-A-3354560 описывает мультикоптер, в своей основе содержащий:
- фюзеляж;
- пару первых двигательных блоков, расположенных на первой стороне фюзеляжа; и
- пару вторых двигательных блоков, расположенных на второй стороне фюзеляжа, противоположной первой стороне.
Каждый первый (второй) двигательный блок в своей основе содержит два винта, вращаемых вокруг соответственных осей вращения, наклоненных друг к другу.
Следовательно, винты каждого первого (второго) двигательного блока соответственно создают первую и вторую тягу, ориентированные соответственно в первом и втором направлениях, наклоненных друг к другу.
Вышеупомянутые первая и вторая тяги имеют вектор тяги, ориентированный в плоскости, образованной первым и вторым направлениями.
Путем управления скоростью вращения винтов каждого первого (второго) двигательного блока и/или регулировки шага связанных лопастей можно ориентировать направление и регулировать модуль общего вектора тяги, создаваемого первым (вторым) двигательным блоком.
Первые (вторые) двигательные блоки также имеют разные углы наклона друг от друга относительно продольного направления летательного аппарата.
US-A-2014/0158815 раскрывает летательный аппарат вертикального взлета и посадки с нулевым переходом согласно ограничительной части пункта 1 формулы изобретения, а также способ управления согласно ограничительной части пункта 26 формулы изобретения.
WO-A-2018/038822 раскрывает летательный аппарат-мультикоптер с конфигурацией винтов с широким размахом. В различных вариантах выполнения мультикоптер содержит фюзеляж и группу винтов. Группа винтов содержит внутренние винты и внешние винты, при этом внутренние винты по существу окружены внешними винтами или фюзеляжем. Внутренние винты и внешние винты могут быть наклонены по меньшей мере частично в зависимости от их расположения относительно фюзеляжа.
US-B-9,764,833 раскрывает узел балки для установки винта с балкой для установки винта, крепимой с возможностью отсоединения к крылу личного летательного аппарата, одним или более винтами вертикального подъема и одним или более узлами контроллера винта. Узлы контроллера для каждого винта расположены на балках для установки винта так, что скошенный вниз поток от винта заставляет увеличенный поток воздуха через узел контроллера охлаждать компоненты узла контроллера. Корпус контроллера винта содержит впускное отверстие для воздуха и выпускное отверстие для воздуха, чтобы позволять потоку воздуха через корпус охлаждать компоненты контроллера. Впускное отверстие для воздуха расположено относительно траектории лопастей винта так, что скошенный вниз поток от винта, который течет во впускное отверстие для воздуха, максимизируется. Конструкция корпуса содержит признаки для увеличения потока воздуха через корпус.
US-A-2005/0230524 раскрывает летательный аппарат вертикального взлета и посадки, который оснащен группой генераторов тяги, которые создают тягу, направленную по существу вертикально вверх относительно летательного аппарата; первым первичным двигателем, который приводит в действие генераторы тяги, и пассажирским сиденьем. По меньшей мере один из генераторов тяги расположен либо в передней секции летательного аппарата, либо в задней секции летательного аппарата, а оставшийся генератор тяги или генераторы тяги расположены либо в задней секции, либо в передней секции в зависимости от того, в какой из них не расположен по меньшей мере один из генераторов тяги. Первичный двигатель и поверхность для сидения пассажирского сиденья расположены между по меньшей мере одним из генераторов тяги в передней секции летательного аппарата и по меньшей мере одним из генераторов тяги в задней секции летательного аппарата и в положении ниже всех генераторов тяги. Центр тяжести летательного аппарата вертикального взлета и посадки находится ниже центра летательного аппарата и свисает вниз, когда летательный аппарат находится в полете, из-за тяги, создаваемой генераторами тяги.
US 2,828,929 раскрывает бескрылый летательный аппарат, содержащий элемент корпуса, образованный с продолжающимся вверх задним участком, первый и второй каналы, образованные через участок корпуса. Каналы образованы под углом приблизительно тридцать градусов относительно друг друга в форме перевернутой буквы Y. Перевернутая буква V продолжается вдоль элемента корпуса, при этом более задний канал образует с указанным продолжающимся вверх задним участком аэродинамический профиль. Аэродинамический профиль создает подъемную силу в положении полета, первое двигательное средство установлено в первом канале, второе двигательное средство установлено во втором канале и средство аэродинамического управления установлено на указанном элементе корпуса для управления тангажом, рысканием и креном летательного аппарата.
CN-A-109263906 раскрывает композитное крыло, содержащее основную часть крыла, двигатель и воздушный винт. Основная часть крыла идентична традиционному крылу, не имеющему конструкции элерона.
US 935,884 раскрывает турбовентиляторные летательные транспортные средства, которые выполнены с возможностью управляемого вертикального подъема и управляемого вертикального снижения относительно земли с присущей им устойчивостью в полете.
US 2006/0226281 описывает мультикоптер, содержащий:
- фюзеляж; и
- группу винтов, расположенных на сторонах фюзеляжа и выполненных с возможностью наклона относительно фюзеляжа.
WO-A-2018/075412 описывает мультикоптер, содержащий:
- фюзеляж;
- пару крыльев, выступающих консольным образом из соответственных взаимно противоположных сторон фюзеляжа;
- группу первых винтов, поддерживаемых одним из крыльев, расположенных на одной оси в направлении протяженности указанного крыла и имеющих соответственные первые оси, наклоненные друг к другу; и
- группу вторых винтов, поддерживаемых другим крылом, расположенных на одной оси в направлении протяженности указанного крыла и имеющих соответственные вторые оси, наклоненные друг к другу.
CN-A-105539835 раскрывает летательный аппарат вертикального взлета и посадки с композитным крылом, который использует специальную вертикальную силовую установку и дизайн цельной конструкции. Согласно схеме, предложенной изобретением, летательный аппарат вертикального взлета и посадки с композитным крылом имеет преимущества в том, что максимальный управляющий момент рыскания летательного аппарата значительно улучшается, предотвращается отрицательное влияние насыщения управления рысканием на управление положением летательного аппарата и улучшается надежность летательного аппарата; более того, техническая схема хвостовой балки способствует улучшению характеристик летательного аппарата в целом.
WO-A-2019/126612 раскрывает автономную систему извлечения и доставки грузовых контейнеров, которая определяет местоположение выбранного грузового контейнера и подводит беспилотное воздушное транспортное средство близко к контейнеру для извлечения. Транспортное средство располагается так, чтобы зацеплять грузовой контейнер посредством захватывающего механизма, и в ответ на зацепление грузового контейнера втягивает грузовой контейнер по направлению к транспортному средству. Когда грузовой контейнер втягивается по направлению к транспортному средству, датчики веса внутри механизма извлечения обнаруживают вес и распределение веса грузового контейнера и могут изменять местоположение грузового контейнера на транспортном средстве для оптимизации полетных операций транспортного средства или возвращать контейнер на землю и оповещать оператора о том, что грузовой контейнер является слишком тяжелым или имеет неправильное распределение веса. При стыковке грузового контейнера с транспортным средством соединительный механизм защелкивает или закрепляет грузовой контейнер на транспортном средстве для дополнительных полетных и/или наземных операций.
ОБЪЕКТ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является конструирование летательного аппарата, выполненного с возможностью вертикального взлета и посадки, который позволяет удовлетворять вышеупомянутую необходимость простым и недорогим образом.
Вышеуказанная задача решается с помощью настоящего изобретения в части, касающейся летательного аппарата, выполненного с возможностью вертикального взлета и посадки, который определен в пункте 1 формулы изобретения.
Настоящее изобретение также относится к способу управления для летательного аппарата, выполненного с возможностью вертикального взлета и посадки, который определен в пункте 26 формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для лучшего понимания настоящего изобретения далее описаны четырнадцать предпочтительных вариантов выполнения исключительно в качестве неограничивающего примера и со ссылкой на сопровождающие чертежи, на которых:
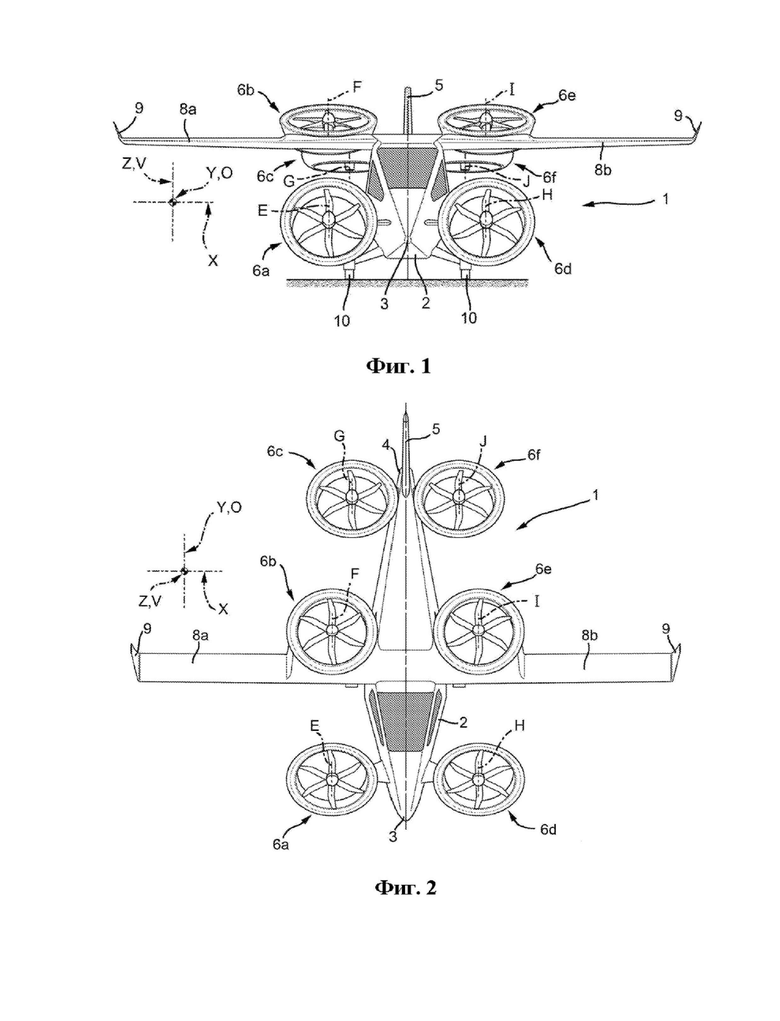
- Фигура 1 представляет собой вид спереди первого варианта выполнения летательного аппарата, выполненного с возможностью вертикального взлета и посадки, сконструированного согласно принципам настоящего изобретения, в положении взлета/посадки;
- Фигура 2 представляет собой вид сверху летательного аппарата на Фигуре 1;
- Фигура 3 представляет собой вид сбоку летательного аппарата на Фигурах 1 и 2;
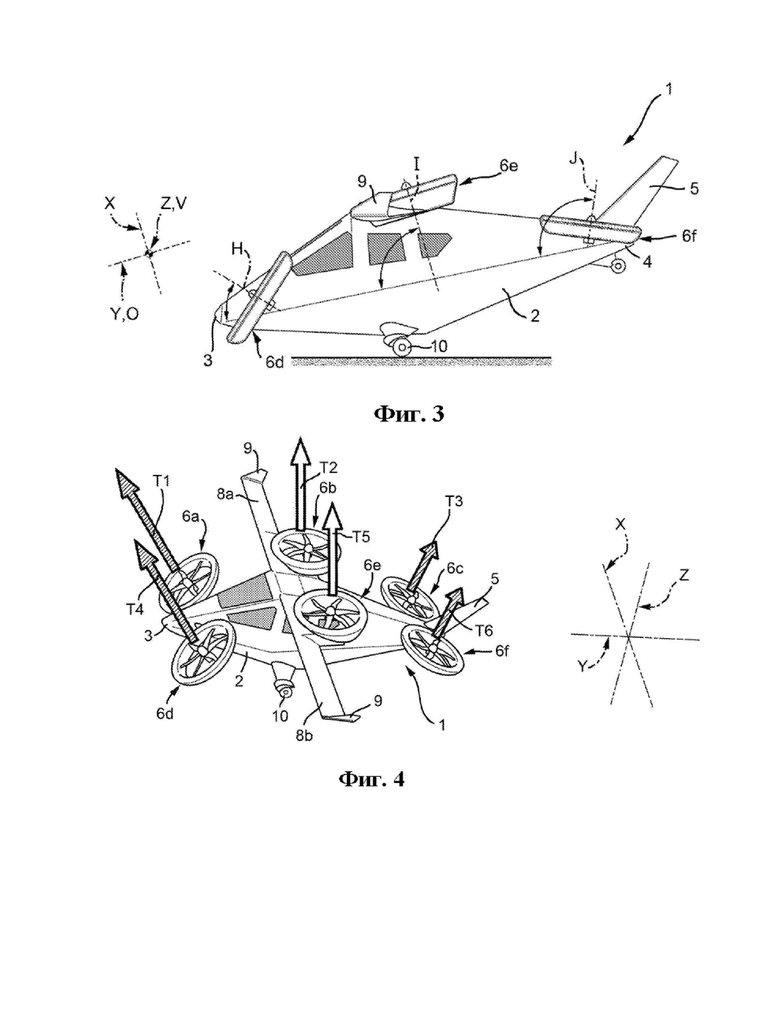
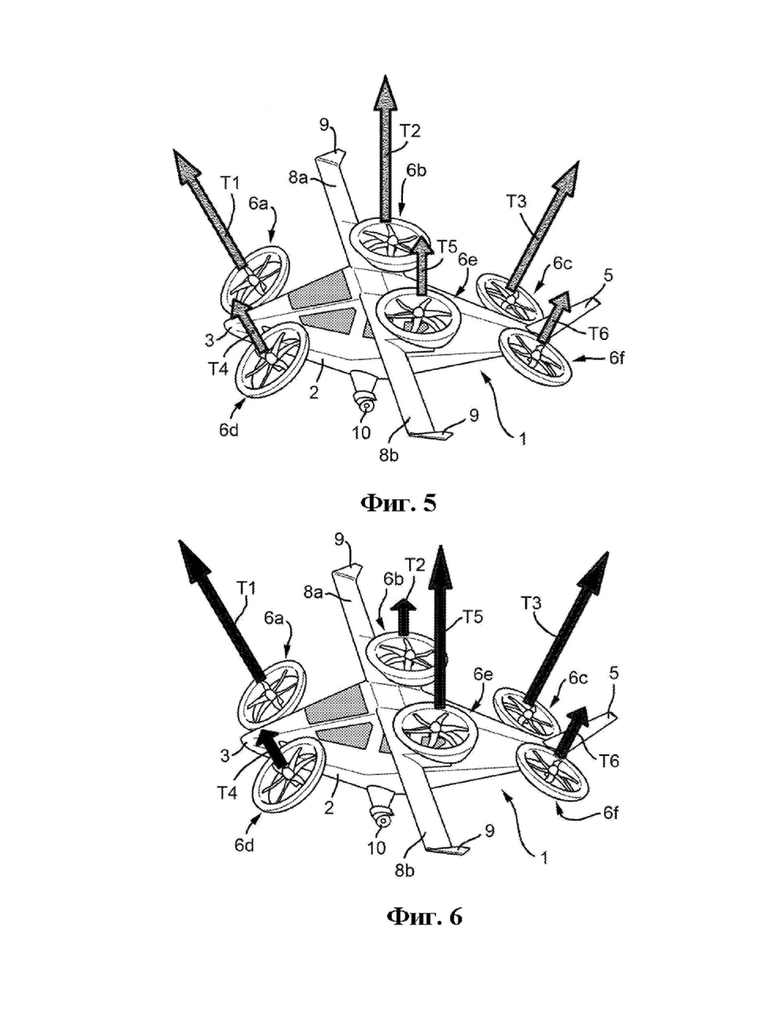
- Фигуры 4-6 представляют собой виды в перспективе летательного аппарата на Фигурах 1-3 во время выполнения соответственных полетных маневров в состоянии висения;
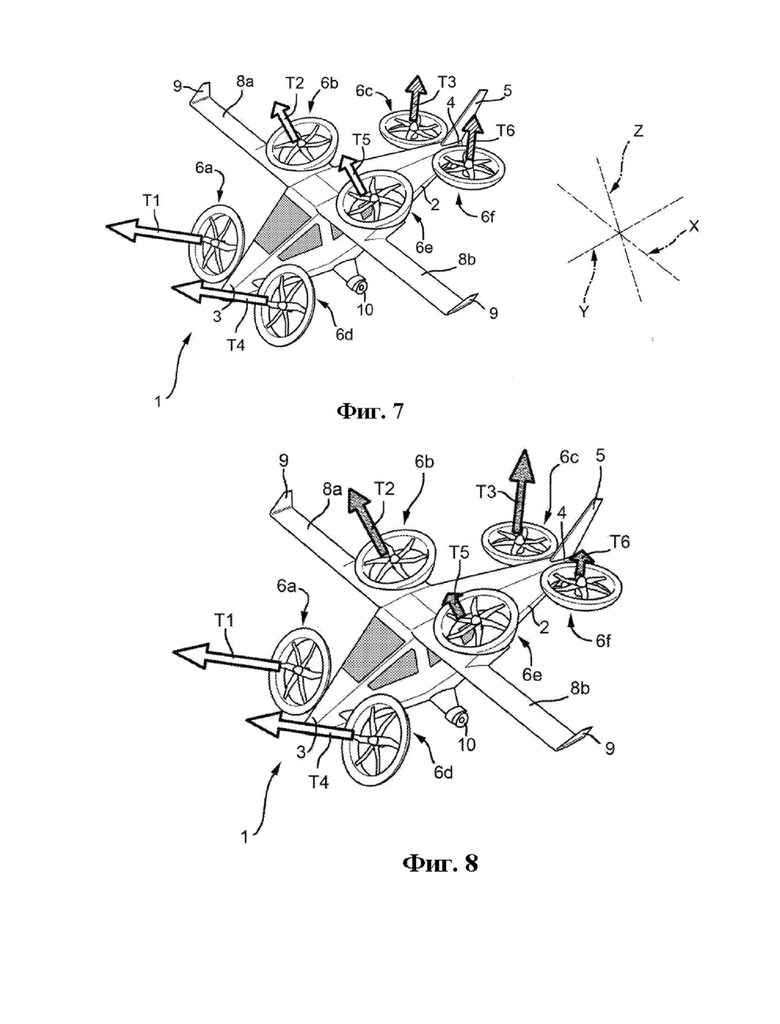
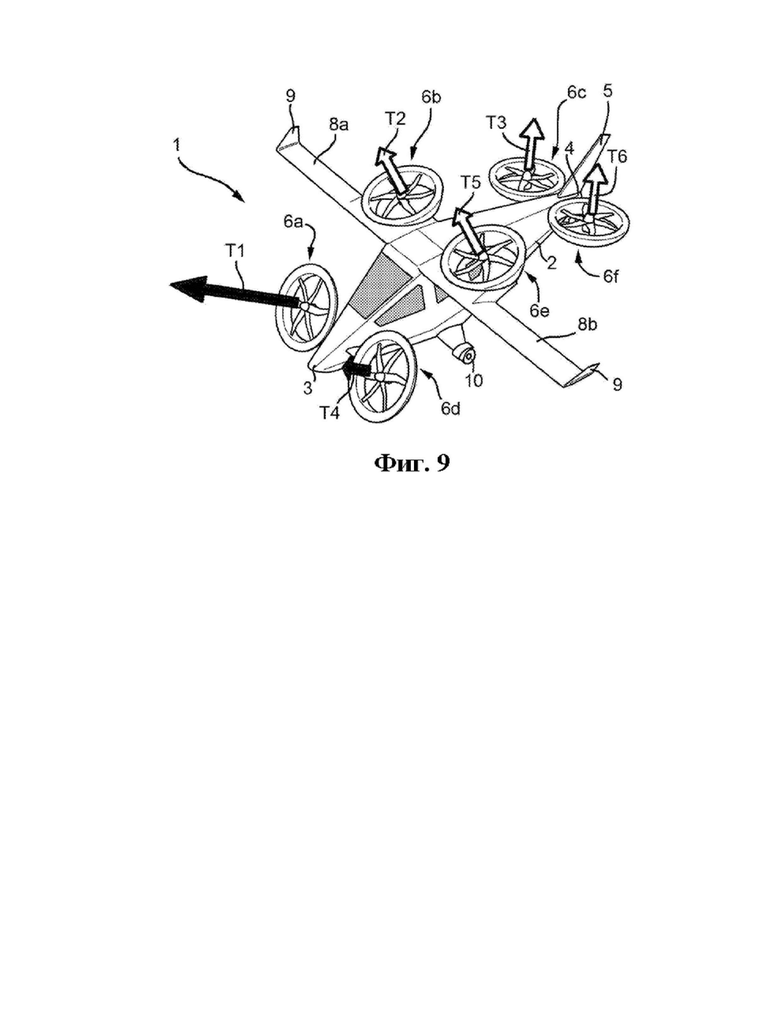
- Фигуры 7-9 представляют собой виды в перспективе летательного аппарата на Фигурах 1-3 во время выполнения соответственных полетных маневров в состоянии полета вперед;
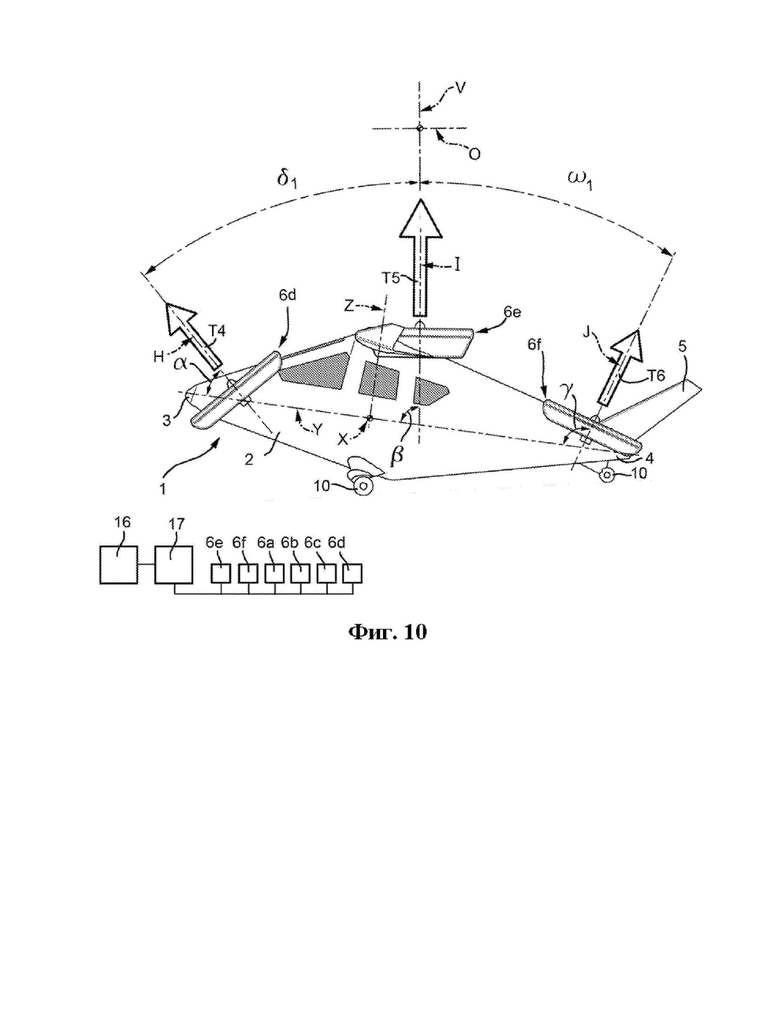
- Фигура 10 представляет собой вид сбоку летательного аппарата на Фигурах 1-9 в состоянии взлета/посадки;
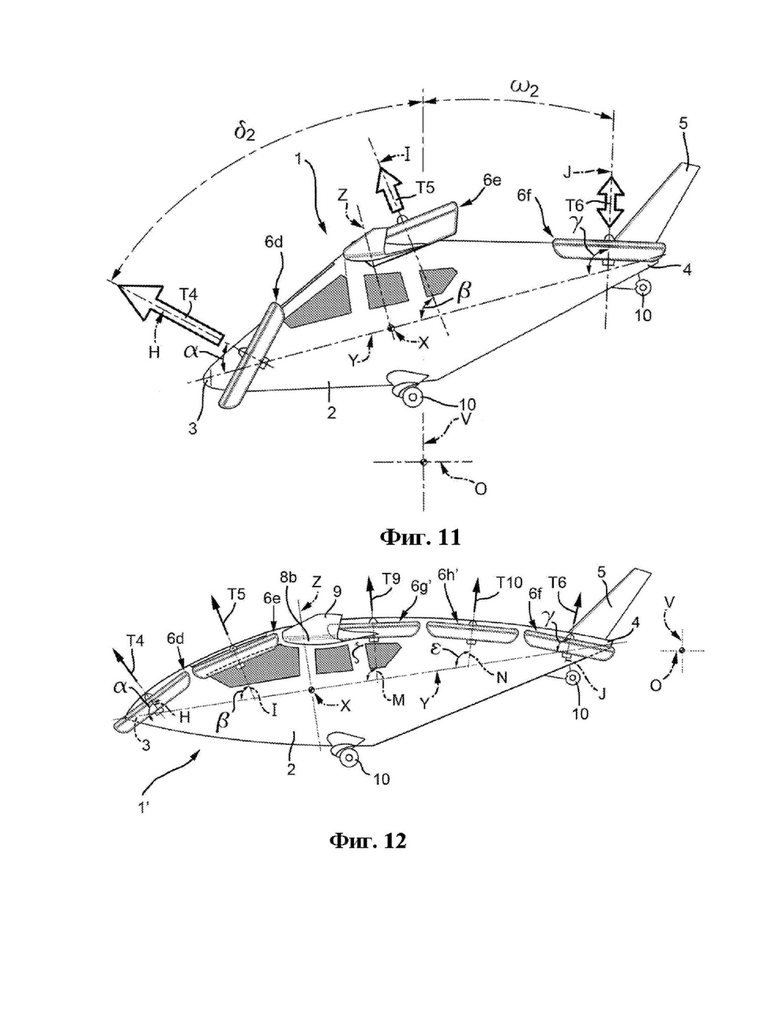
- Фигура 11 представляет собой вид сбоку летательного аппарата на Фигурах 1-10 в состоянии полета вперед;
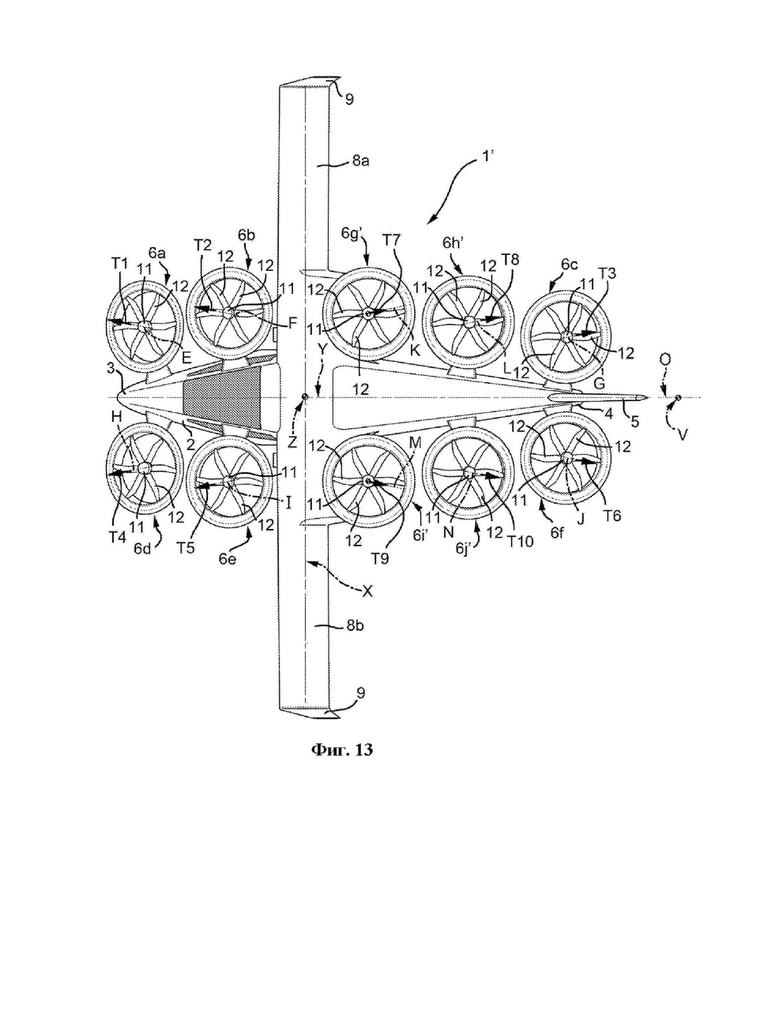
- Фигуры 12 и 13 представляют собой вид спереди и вид сверху соответственно второго варианта выполнения летательного аппарата, выполненного с возможностью вертикального взлета и посадки, согласно изобретению;
- Фигуры 14 и 15 представляют собой виды сбоку в состоянии висения и в состоянии полета вперед соответственно третьего варианта выполнения летательного аппарата, выполненного с возможностью вертикального взлета и посадки, который показан только в иллюстративных целях;
- Фигура 16 представляет собой вид в перспективе четвертого варианта выполнения летательного аппарата, выполненного с возможностью вертикального взлета и посадки согласно изобретению;
- Фигура 17 представляет собой вид в перспективе пятого варианта выполнения летательного аппарата, выполненного с возможностью вертикального взлета и посадки, согласно изобретению;
- Фигура 18 представляет собой вид в перспективе в увеличенном масштабе и снизу некоторых компонентов летательного аппарата, выполненного с возможностью вертикального взлета и посадки, на Фигуре 17;
- Фигура 19 представляет собой вид в перспективе шестого варианта выполнения летательного аппарата, выполненного с возможностью вертикального взлета и посадки, согласно изобретению;
- Фигура 20 представляет собой вид в перспективе седьмого варианта выполнения летательного аппарата, выполненного с возможностью вертикального взлета и посадки, согласно изобретению;
- Фигуры 21-25 представляют собой соответственные виды сбоку соответственного восьмого, девятого, десятого, одиннадцатого, двенадцатого варианта выполнения летательного аппарата, выполненного с возможностью вертикального взлета и посадки, согласно изобретению;
- Фигура 26 представляет собой вид сзади тринадцатого варианта выполнения летательного аппарата, выполненного с возможностью вертикального взлета и посадки, согласно изобретению с частями, удаленными для ясности;
- Фигура 27 схематически показывает этап эксплуатации летательного аппарата, выполненного с возможностью вертикального взлета и посадки, согласно изобретению согласно тринадцатому варианту выполнения;
- Фигура 28 представляет собой вид сзади четырнадцатого варианта выполнения летательного аппарата, выполненного с возможностью вертикального взлета и посадки, согласно изобретению с частями, удаленными для ясности; и
- Фигура 29 схематически показывает этап эксплуатации летательного аппарата, выполненного с возможностью вертикального взлета и посадки, согласно изобретению согласно тринадцатому варианту выполнения.
ПРЕДПОЧТИТЕЛЬНЫЕ ВАРИАНТЫ ВЫПОЛНЕНИЯ ИЗОБРЕТЕНИЯ
Со ссылкой на Фигуры 1-11 ссылочная позиция 1 обозначает летательный аппарат вертикального взлета и посадки, сконструированный согласно первому варианту выполнения изобретения.
Конкретнее, летательный аппарат 1 выполнен с возможностью взлета и посадки в по существу вертикальном направлении и крейсирования в полете вперед как обычный летательный аппарат.
Летательный аппарат 1 также выполнен с возможностью висения.
Летательный аппарат 1 также выполнен с возможностью короткого взлета/посадки.
Летательный аппарат 1 в своей основе содержит:
- фюзеляж 2, оснащенный носовой частью 3 и хвостовой частью 4, противоположными друг другу;
- неподвижное оперение 5, выступающее консольным образом из хвостового участка 4 фюзеляжа 2; и
- группу винтов 6a, 6b и 6c; 6d, 6e и 6f, удерживаемых фюзеляжем 2.
Летательный аппарат 1 также содержит пару крыльев 8а и 8b, расположенных на сторонах фюзеляжа 2 и выступающих консольным образом из фюзеляжа 2.
Можно идентифицировать набор из трех осей, составляющих единое целое с летательным аппаратом 1 и имеющих начало в центре масс летательного аппарата 1, образованный:
- осью Y, параллельной направлению протяженности фюзеляжа 2;
- осью X, перпендикулярной оси Y; и
- осью Z, перпендикулярной осям X-Y.
Повороты летательного аппарата 1 вокруг осей Y-X-Z связаны со следующими маневрами:
- креном, а именно поворотом вокруг оси Y (Фигуры 5 и 8);
- тангажом, а именно поворотом вокруг оси X (Фигуры 4 и 7); и
- рысканием, а именно поворотом вокруг оси Z (Фигуры 6 и 9).
С особой ссылкой на Фигуры 10 и 11 также можно идентифицировать пару осей, составляющих единое целое с землей, образованных:
- осью V, расположенной вертикально и соответствующей направлению движения вверх/вниз летательного аппарата 1; и
- осью O, расположенной горизонтально и соответствующей направлению полета вперед летательного аппарата 1.
В показанном случае крылья 8а и 8b содержат соответственные винглеты 9, которые расположены на соответственных свободных законцовках, противоположных фюзеляжу 2.
Конкретнее, винглеты 9 выступают из соответственных крыльев 8а и 8b из части, противоположной фюзеляжу 2, и вверх в показанном случае.
Летательный аппарат 1 также содержит группу шасси 10, расположенных под фюзеляжем 2 и выполненных с возможностью опирания на землю до взлета и затем после посадки летательного аппарата 1.
В частности, винты 6a, 6b и 6c расположены на первой стороне фюзеляжа 2, тогда как винты 6d, 6e и 6f расположены на второй стороне фюзеляжа 2, противоположной первой стороне.
Еще конкретнее, со ссылкой на вид сверху летательного аппарата 1 (Фигура 2) винты 6a, 6b и 6c расположены на левой стороне фюзеляжа 2, тогда как винты 6d, 6e и 6f расположены на правой стороне фюзеляжа 2.
От носовой части 3 до хвостовой части 4 винты 6a, 6b и 6c расположены в одном и том же порядке.
Аналогично от носовой части 3 до хвостовой части 4 винты 6d, 6e и 6f расположены в одном и том же порядке.
Каждый винт 6a, 6b, 6c, 6d, 6e и 6f содержит, в частности:
- втулку 11, выполненную с возможностью вращения вокруг соответственной оси E, F, G, H, I и J; и
- группу лопастей 12, выступающих из втулки 11 консольным образом радиально соответствующей оси E, F, G, H, I и J.
Винты 6a, 6b, 6c, 6d, 6e и 6f эксплуатируются независимо друг от друга.
Конкретнее, винты 6a, 6b, 6c, 6d, 6e и 6f создают соответственные тяги T1, T2, T3, T4, T5 и T6, выполненные с возможностью регулировки независимо друг от друга.
Тяги T1, T2, T3, T4, T5 и T6 имеют соответственные направления приложения, соответственно параллельные осям E, F, G, H, I и J соответствующих винтов 6a, 6b, 6c, 6d, 6e и 6f.
Оси E и H винтов 6a и 6d параллельны друг другу и образуют угол α с осью Y.
Аналогично оси F и I винтов 6b и 6e параллельны друг другу и образуют угол β с осью Y.
Оси G и J винтов 6c и 6f параллельны друг другу и образуют угол γ с осью Y.
Тяги T1 и T4 параллельны друг другу и наклонены под углом α относительно оси Y.
Тяги T2 и T5 параллельны друг другу и наклонены под углом β относительно оси Y.
Тяги T3 и T6 параллельны друг другу и наклонены под углом γ относительно оси Y.
Углы α, β и γ проходят от оси Y до соответственных осей E и H винтов 6a и 6d, осей F и I винтов 6b и 6e и осей G и J винтов 6c и 6f.
В показанном случае угол α меньше угла β, а угол β меньше угла γ.
Предпочтительно углы α, β, γ отличаются друг от друга.
Винты 6a, 6b, 6c, 6d, 6e и 6f предпочтительно имеют электрический привод. Альтернативно винты 6a, 6b, 6c, 6d, 6e и 6f могут быть приведены в движение двигателем внутреннего сгорания, гибридной электрической-внутреннего сгорания двигательной системой или гидравлическим двигателем.
Винты 6a, 6b, 6c, 6d, 6e и 6f могут иметь постоянный шаг с переменной угловой скоростью, постоянный шаг и постоянную угловую скорость или переменный шаг и переменную угловую скорость.
Оси E, F, G, H, I и J неподвижны относительно осей X-Y-Z летательного аппарата 1 во время маневров летательного аппарата 1.
Следовательно, направления приложения соответствующих тяг T1, T2, T3, T4, T5 и T6 остаются постоянными относительно осей X-Y-Z летательного аппарата 1.
Напротив, модули и направления тяг T1, T2, T3, T4, T5 и T6 выполнены с возможностью регулировки независимо друг от друга.
Таким образом, можно регулировать модуль и направление вектора T тяги тяг T1, T2, T3, T4, T5 и T6, прикладываемых к летательному аппарату 1, без вращения соответственных винтов 6a, 6b, 6c, 6d, 6e и 6f относительно летательного аппарата 1, но путем простой регулировки модулей и направлений тяг T1, T2, T3, T4, T5 и T6.
В показанном варианте выполнения винты 6a, 6b, 6c, 6d, 6e и 6f поддерживают неподвижное положение относительно осей X-Y-Z.
Летательный аппарат 1 дополнительно содержит:
- элемент 16 управления (показанный только схематически на Фигуре 10), который может эксплуатироваться пилотом или автопилотом;
- блок 17 управления (показанный только схематически на Фигуре 10), эксплуатируемый элементом 16 управления и функционально соединенный с винтами 6a, 6b, 6c, 6d, 6e и 6f для регулировки модуля и направления соответственных тяг T1, T2, T3, T4, T5 и T6 для создания вектора T тяги с желаемым модулем и направлением.
В этом описании под термином «блок управления» подразумевается любая механическая или электронная система управления полетом, выполненная с возможностью преобразования элемента 16 управления в закон регулирования для тяг T1, T2, T3, T4, T5 и T6 винтов 6a, 6b, 6c, 6d, 6e и 6f.
Более подробно, блок 17 управления запрограммирован с возможностью создания вектора T тяги так, чтобы позволять вертикальный взлет/посадку, висение, полет вперед и любой переход между вышеупомянутыми состояниями эксплуатации летательного аппарата 1.
Блок 17 управления запрограммирован с возможностью выборочного расположения летательного аппарата 1:
- в первом пространственном положении (Фигура 10), предпочтительно занимаемом при нахождении в состояниях взлета/посадки и в состоянии висения и когда вектор T тяги параллелен оси V и направлен вверх; или
- во втором пространственном положении (Фигура 11), предпочтительно занимаемом при нахождении в состояниях полета вперед и когда вектор T тяги имеет компонент, параллельный оси O и направленный от хвостовой части к носовой части 3, и компонент, параллельный оси V и направленный вверх.
Блок 17 управления также запрограммирован с возможностью выборочного расположения в зависимости от элемента 16 управления летательного аппарата 1 во множестве промежуточных пространственных положений (не показаны) между первым и вторым пространственными положениями и когда вектор T тяги имеет компонент, параллельный оси V, и компонент, параллельный оси O.
Предпочтительно, летательный аппарат 1 переходит из первого во второе пространственное положение и наоборот путем совершения движения тангажа вокруг оси, параллельной оси X.
В показанном случае летательный аппарат 1 переходит из первого во второе пространственное положение путем поворота, ориентированного от хвостовой части 4 к носовой части 3, т.е. с помощью маневра опускания носовой части.
В частности, блок 17 управления запрограммирован с возможностью расположения и поддержания летательного аппарата 1 в первом пространственном положении посредством разных эксплуатационных конфигураций винтов 6а и 6b; 6c и 6d; 6e и 6f.
Конкретнее, в первой эксплуатационной конфигурации (Фигура 10):
- винты 6b и 6e ориентированы так, что соответственные оси F и I параллельны направлению V, а соответственные тяги T2 и T5 равны друг другу, параллельны направлению V и направлены вверх;
- винты 6a и 6d ориентированы так, что соответственные оси E и H наклонены под углом δ1 относительно направления V, а соответственные тяги T1 и T4 равны друг другу; и
- винты 6c и 6f ориентированы так, что соответственные оси G и J наклонены под углом ω1 относительно направления V, а соответственные тяги T3 и T6 равны друг другу.
Конкретнее, блок 17 управления запрограммирован с возможностью создания модулей тяг T1 и T4; T3 и T6 так, что компоненты тяг T1 и T4, параллельные оси O, равны и противоположны компонентам тяг T3 и T6, параллельным оси O.
Блок 17 управления также запрограммирован с возможностью создания модулей тяг T1 и T4; T3 и T6 так, что сумма компонентов тяг T1 и T4; T3 и T6, параллельных оси V, и тяг T2; T5 равна силе, параллельной оси V, необходимой для поддержания летательного аппарата 1 в первом пространственном положении.
Во второй эксплуатационной конфигурации (не показана) тяги T2 и T5, создаваемые винтами 6b и 6e, параллельны направлению V, а винты 6a и 6d; 6c и 6f деактивированы.
Блок 17 управления также запрограммирован с возможностью управления винтами 6a, 6b, 6c, 6d, 6e и 6f и регулировки соответственных тяг T1, T2, T3, T4, T5 и T6 так, чтобы управлять тангажом, креном и рысканием летательного аппарата 1, расположенного в первом пространственном положении, согласно неограничивающим способам, описанным ниже в качестве примера.
Со ссылкой на Фигуру 4 блок 17 управления запрограммирован с возможностью управления тангажом летательного аппарата 1 в первом пространственном положении путем увеличения (уменьшения) тяг T1 и T4 (T3 и T6) винтов 6a и 6d (6с и 6f) и уменьшения (увеличения) тяг T3 и T6 (T1 и T4) винтов 6c и 6f (6а и 6d). Таким образом, вокруг оси X создается момент тангажа.
Со ссылкой на Фигуру 5 блок 17 управления запрограммирован с возможностью управления креном летательного аппарата 1, расположенного в первом пространственном положении, путем увеличения (уменьшения) тяг T1, T2 и T3 (T4, T5 и T6) винтов 6a, 6b и 6c (6d, 6e и 6f). Таким образом, вокруг оси Y создается момент крена.
Со ссылкой на Фигуру 6 блок 17 управления запрограммирован с возможностью управления рысканием летательного аппарата 1, расположенного в первом пространственном положении, путем увеличения (уменьшения) тяг T1, T3 и T5 (T2, T4 и T6) винтов 6a, 6c и 6e (6b, 6d и 6f). Таким образом, вокруг оси Z создается момент рыскания.
Блок 17 управления также запрограммирован с возможностью расположения летательного аппарата 1 во втором пространственном положении посредством разных эксплуатационных конфигураций винтов 6а и 6b; 6c и 6d; 6e и 6f.
Конкретнее, в третьей эксплуатационной конфигурации (Фигура 11):
- винты 6a и 6d ориентированы так, что соответственные оси E и H наклонены относительно оси V под соответственными углами δ2, равными друг другу, и создают соответственные тяги T1 и T4, равные друг другу, имеющие одинаковые модули, имеющие первые компоненты, параллельные оси O, направленные от хвостовой части 4 к носовой части 3, и первые компоненты, параллельные оси V, направленные вверх;
- винты 6b и 6e ориентированы так, что соответственные оси F и I наклонены относительно оси V под вторыми углами, превышающими соответствующие углы ω2 осей G, J винтов 6c и 6f, и создают соответственные тяги T2 и T5, равные друг другу, имеющие одинаковые модули и имеющие вторые компоненты, параллельные оси O, направленные от хвостовой части 4 к носовой части 3, и вторые компоненты, параллельные оси V и направленные вверх; и
- винты 6c и 6f ориентированы так, что соответственные оси G и J и соответственные тяги T3 и T6 параллельны оси V.
В показанном случае тяги T1 и T4 больше по модулю, чем тяги T2 и T5.
Блок 17 управления запрограммирован с возможностью управления винтами 6a, 6b, 6c, 6d, 6e и 6f и регулировки соответственных тяг T1, T2, T3, T4, T5 и T6 так, чтобы управлять тангажом, креном и рысканием летательного аппарата 1, расположенного во втором пространственном положении (Фигуры 7, 8 и 9), согласно неограничивающим способам, описанным ниже в качестве примера.
Со ссылкой на Фигуру 7 блок 17 управления запрограммирован с возможностью управления тангажом летательного аппарата 1 во втором пространственном положении путем увеличения (уменьшения) тяг T3 и T6 (T1 и T4) винтов 6c и 6f (6а и 6d) и уменьшения (увеличения) тяг T1 и T4 (T3 и T6) винтов 6a и 6d (6c и 6f). Таким образом, вокруг оси X создается момент тангажа.
Со ссылкой на Фигуру 8 блок 17 управления запрограммирован с возможностью управления креном летательного аппарата 1, расположенного во втором пространственном положении, путем увеличения (уменьшения) тяг T2 и T3 (T5 и T6) и винтов 6b и 6c (6e и 6f). Таким образом, вокруг оси Y создается момент крена.
Со ссылкой на Фигуру 9 блок 17 управления запрограммирован с возможностью управления рысканием летательного аппарата 1, расположенного во втором пространственном положении, путем увеличения (уменьшения) тяг T1 (T4) винтов 6a, (6d). Таким образом, вокруг оси Z создается момент крена.
Описана эксплуатация летательного аппарата 1, начиная с состояния, в котором он находится в первом пространственном положении (Фигура 10), например, в фазе взлета или висения.
В этом состоянии винтами 6a, 6b, 6c, 6d, 6e и 6f управляют так, что вектор T тяги соответственных тяг T1, T2, T3, T4, T5 и T6 по существу параллелен оси V.
Например, в этом состоянии блок 17 управления управляет тягами T1, T2, T3, T4, T5 и T6 винтов 6a, 6b, 6c, 6d, 6e и 6f согласно ранее описанным первой или второй конфигурациям.
В этом первом пространственном положении блок 17 управления управляет тангажом, креном и рысканием путем регулировки тяг T1, T2, T3, T4, T5 и T6 соответственных винтов 6a, 6b, 6c, 6d, 6e и 6f так, чтобы создавать соответственные моменты вокруг осей X-Y-Z, например, как показано на соответственных Фигурах 4, 5 и 6 и описано ранее.
В одном варианте выполнения настоящего изобретения летательный аппарат 1 переходит из первого пространственного положения (Фигура 10) во второе пространственное положение (Фигура 11) путем наклона вокруг оси X, т.е. путем приложения момента вокруг оси X.
Этот момент создает опускание носовой части летательного аппарата 1, т.е. снижение носовой части 3 и подъем хвостовой части 4.
В этот момент летательный аппарат 1 находится во втором пространственном положении и крылья 8а и 8b создают, в зависимости от скорости движения вперед летательного аппарата 1, определенное непосредственное значение подъемной силы, параллельной оси V.
В этом состоянии винтами 6a, 6b, 6c, 6d, 6e и 6f управляют так, что вектор T тяги соответственных тяг T1, T2, T3, T4, T5 и T6 имеет компонент, параллельный оси O, который создает прямую тягу на летательном аппарате, и компонент, параллельный оси V и равный весу летательного аппарата 1, который вместе с подъемной силой, создаваемой крыльями 8а и 8b, позволяет поддерживать полет.
Например, в этом состоянии блок 17 управления управляет тягами T1, T2, T3, T4, T5 и T6 винтов 6a, 6b, 6c, 6d, 6e и 6f согласно ранее описанным третьей или четвертой конфигурациям.
В этом втором пространственном положении блок 17 управления управляет тангажом, креном и рысканием путем регулировки тяг T1, T2, T3, T4, T5 и T6 соответственных винтов 6a, 6b, 6c, 6d, 6e и 6f так, чтобы создавать соответственные моменты вокруг осей X-Y-Z, например, как показано на соответственных Фигурах 7, 8 и 9 и описано ранее.
Когда необходимо возвращать летательный аппарат 1 в первое пространственное положение, блок 17 управления сначала создает момент вокруг оси X, который вызывает подъем носовой части летательного аппарата 1, т.е. поднятие носовой части 3 и снижение хвостовой части 4, пока не будет достигнуто состояние, показанное на Фигуре 10.
После этого блок 17 управления управляет винтами 6a, 6b, 6c, 6d, 6e и 6f так, что вектор T тяги снова направляется параллельно оси V, а летательный аппарат 1 снова оказывается в первом пространственном положении, в котором он может выполнять посадку.
Со ссылкой на Фигуры 12 и 13 ссылочная позиция 1' обозначает летательный аппарат, выполненный с возможностью вертикального взлета и посадки, согласно второму варианту выполнения настоящего изобретения.
Летательный аппарат 1' аналогичен летательному аппарату 1, и далее будут описаны только отличия от последнего; идентичные или эквивалентные части летательных аппаратов 1, 1' будут отмечены, где это возможно, одинаковыми ссылочными позициями.
В частности, летательный аппарат 1' отличается от летательного аппарата 1 тем, что он содержит два дополнительных винта 6g' и 6h', расположенных на первой стороне фюзеляжа 2, и два дополнительных винта 6i' и 6j', расположенных на второй стороне фюзеляжа 2.
Винты 6g' и 6h' создают соответственные тяги T7 и T8, направленные вдоль соответственных осей K и L, а винты 6i' и 6j' создают соответственные тяги T9 и T10, направленные вдоль соответственных осей М и N.
Более подробно, винты 6g' и 6h' (6i' и 6j') расположены между винтами 6b и 6c (6e и 6f), параллельными оси Y.
Тяги T7 и T9 параллельны друг другу и наклонены под углом ζ относительно оси Y.
Тяги T8 и T10 параллельны друг другу и наклонены под углом ε относительно оси Y.
Углы ζ и ε проходят от оси Y до соответственных осей K и L винтов 6g' и 6h' и осей М и N винтов 6i' и 6j'.
В показанном случае углы α, β, ζ, ε и γ постепенно увеличиваются от носовой части 3 по направлению к хвостовой части 4 летательного аппарата 1'.
Блок 17 управления запрограммирован с возможностью регулировки первых тяг, создаваемых винтами 6g' и 6h' вдоль соответственных осей K и L, и вторых тяг, создаваемых винтами 6i' и 6j' вдоль соответственных осей М и N, независимо друг от друга и независимо от тяг T1, T2, T3, T4, T5 и T6.
Эксплуатация летательного аппарата 1' аналогична эксплуатации летательного аппарата 1 и в связи с этим не описана подробно.
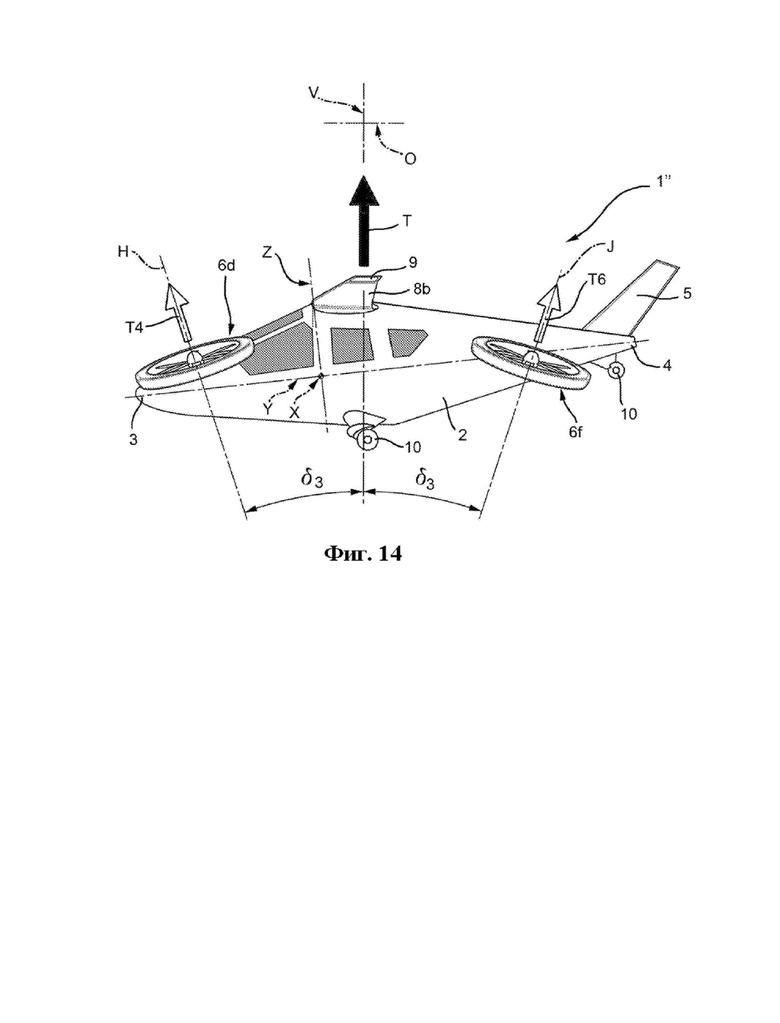
Со ссылкой на Фигуры 14 и 15 ссылочная позиция 1'' обозначает летательный аппарат, выполненный с возможностью вертикального взлета и посадки, согласно третьему варианту выполнения, который показан только в иллюстративных целях.
Летательный аппарат 1'' отличается от летательного аппарата 1 тем, что он не содержит винты 6b и 6e и в связи с этим содержит только два винта 6a и 6c, расположенных на первой стороне фюзеляжа 2, и только два винта 6d и 6f, расположенных на второй стороне фюзеляжа 2.
Эксплуатация летательного аппарата 1'' отличается от эксплуатации летательного аппарата 1 тем, что, когда летательный аппарат 1'' находится в первом пространственном положении (Фигура 14):
- винты 6a и 6d ориентированы так, что соответственные оси E и H наклонены под углом δ3 относительно оси V, а соответственные тяги T1 и T4 равны друг другу; и
- винты 6c и 6f ориентированы так, что соответственные оси G и J наклонены под этим же углом δ3 относительно направления V, а соответственные тяги T3 и T6 равны друг другу, равны по модулю тягам T1 и T4 и симметричны тягам T1 и T4 относительно оси V.
В частности, тяги T1 и T4 и T3 и T6 имеют соответственные компоненты, параллельные оси O, равные и противоположные друг другу.
Блок 17 управления запрограммирован с возможностью создания тяг T1 и T4 и T3 и T6 так, что сумма соответственных компонентов, параллельных оси V, равна силе, параллельной оси V, необходимой для поддержания летательного аппарата 1'' в первом пространственном положении.
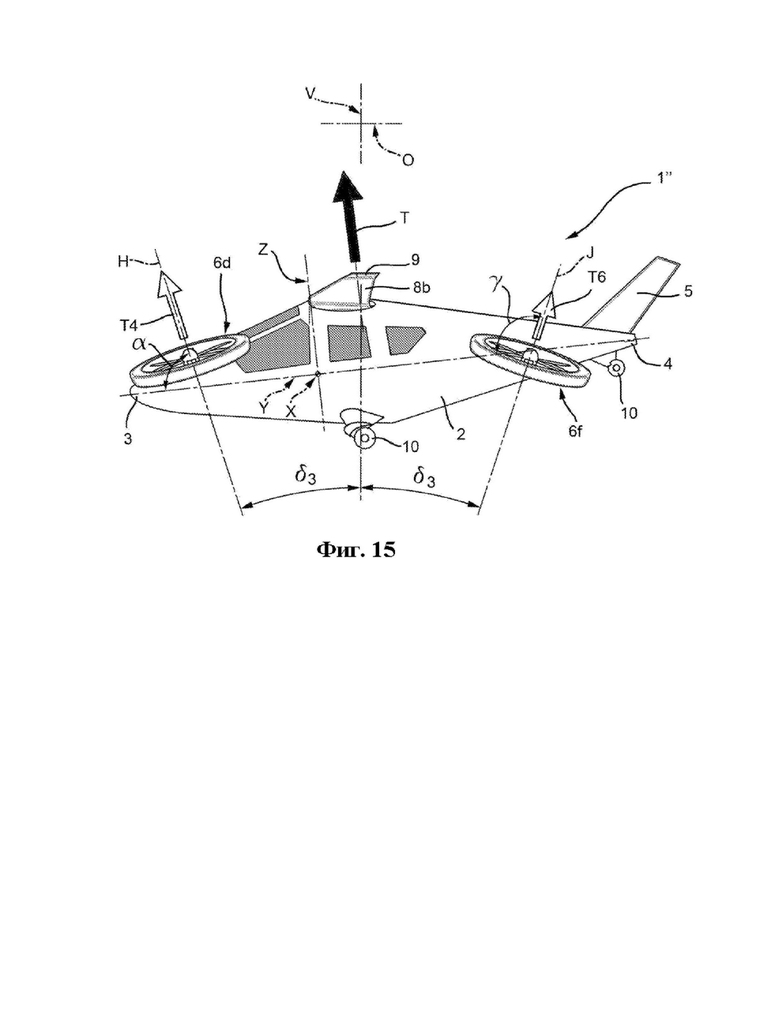
Более того, эксплуатация летательного аппарата 1'' отличается от эксплуатации летательного аппарата 1 тем, что. когда летательный аппарат 1'' находится во втором пространственном положении (Фигура 15):
- винты 6a и 6d ориентированы так, что соответственные оси E и H создают соответственные тяги T1 и T4, равные друг другу, имеющие одинаковые модули, имеющие первые компоненты, параллельные оси O, направленные от хвостовой части 4 к носовой части 3, и вторые компоненты, параллельные оси V, направленные вверх; и
- винты 6c и 6f ориентированы так, что соответственные оси G и J создают соответственные тяги T3 и T6, равные друг другу, имеющие одинаковые модули, имеющие вторые компоненты, параллельные оси O, направленные от носовой части 3 к хвостовой части 4, и вторые компоненты, параллельные оси V, направленные вверх.
Вышеупомянутые первые компоненты, параллельные оси O, противоположны друг другу, и их алгебраическая сумма соответствует компоненту вектора T тяги, параллельному оси O, который создает тягу, необходимую для полета вперед летательного аппарата 1''. Напротив, вышеупомянутые вторые компоненты, параллельные оси V, сходны, и их алгебраическая сумма соответствует компоненту вектора T тяги, параллельному оси V, который позволяет поддерживать летательный аппарат 1'' вместе с подъемной силой, создаваемой крыльями 8а и 8b, во время полета вперед.
Предпочтительно, блок 17 управления запрограммирован с возможностью создания тяг T1 и T4 с большим модулем, чем у тяг T3 и T6.
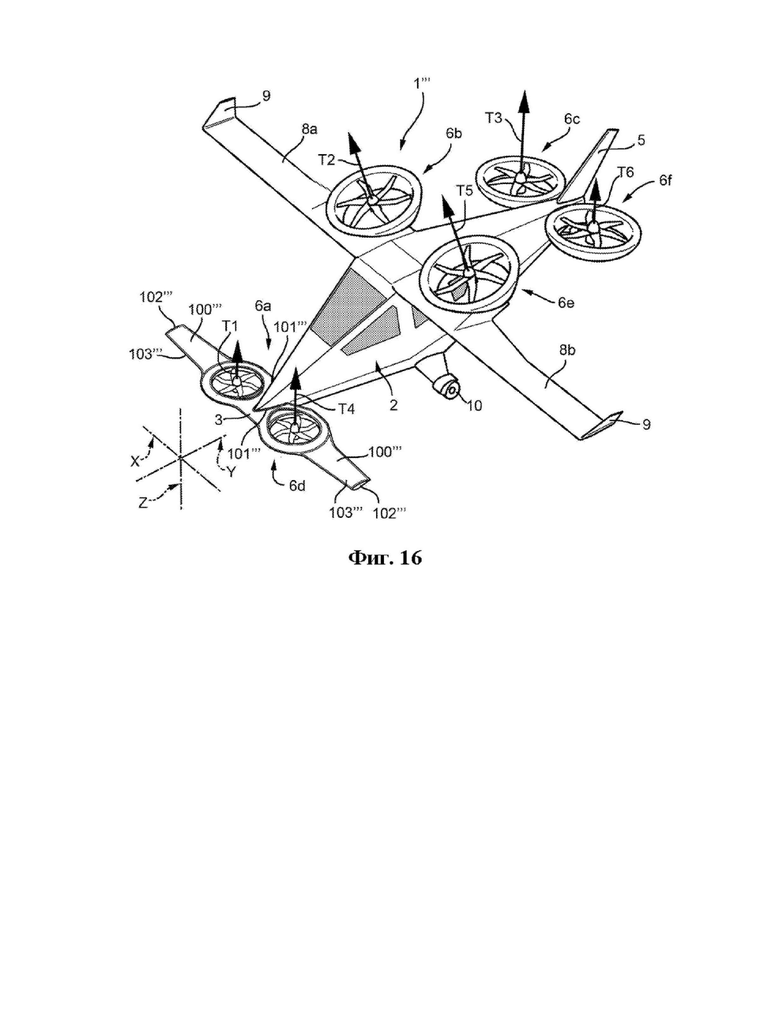
Со ссылкой на Фигуру 16 ссылочная позиция 1''' обозначает летательный аппарат, выполненный с возможностью вертикального взлета и посадки, согласно четвертому варианту выполнения настоящего изобретения.
Летательный аппарат 1''' аналогичен летательному аппарату 1, и далее будет описано только отличие от последнего; идентичные или эквивалентные части летательных аппаратов 1, 1''' будут отмечены, где это возможно, одинаковыми ссылочными позициями.
Летательный аппарат 1''' отличается от летательного аппарата 1 тем, что принимает конфигурацию «утка».
Более подробно, летательный аппарат 1''' содержит пару аэродинамических поверхностей 100''', выступающих в боковом направлении из соответственных сторон фюзеляжа 2.
Аэродинамические поверхности 100''' выступают из носовой части 3 фюзеляжа 2.
Аэродинамические поверхности 100''' имеют длину, параллельную оси X, которая меньше, чем длина соответствующих крыльев 8a, 8b, параллельная оси X.
Винты 6a, 6d расположены на соответственных аэродинамических поверхностях 100'''.
В частности, каждая аэродинамическая поверхность 100''' содержит:
- корневой конец 101''', соединенный с носовой частью 3;
- свободный конец 102''', противоположный соответственному корневому концу 101'''; и
- основной участок 103''', продолжающийся между соответственными концами 101''', 102'''.
Винты 6a, 6d расположены на основных участках 103''' соответственных аэродинамических поверхностей 100'''.
В варианте выполнения, показанном на Фигуре 16, винты 6a, 6d закрыты кожухом.
Эксплуатация летательного аппарата 1''' аналогична эксплуатации летательного аппарата 1 и в связи с этим не описана подробно.
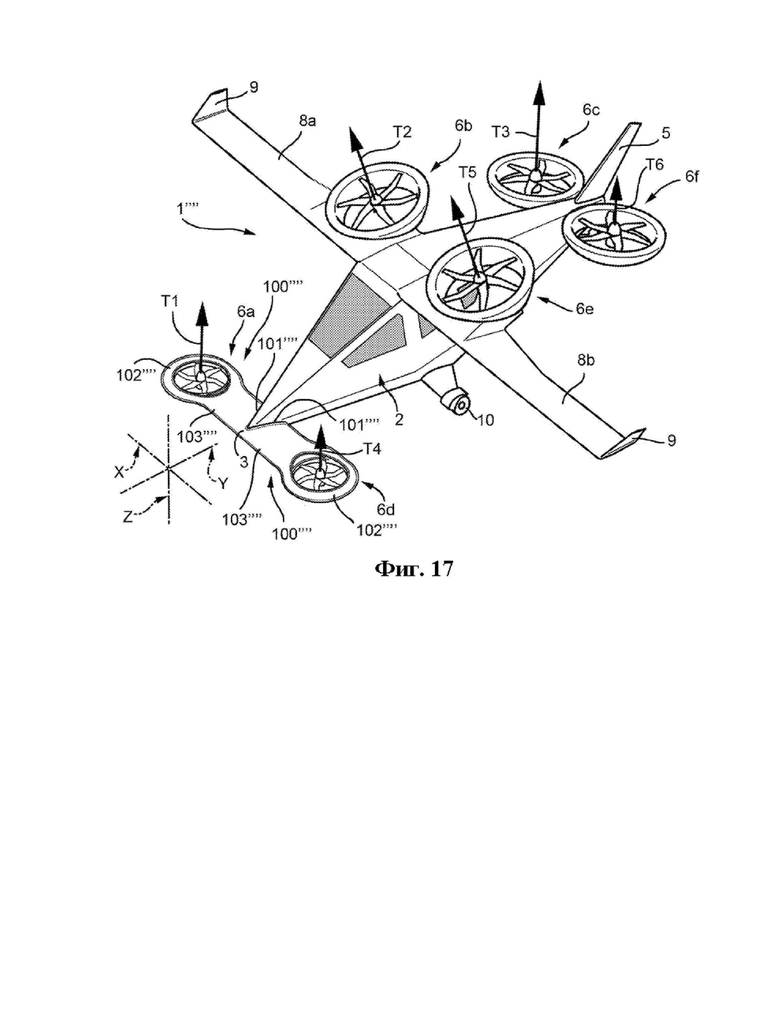
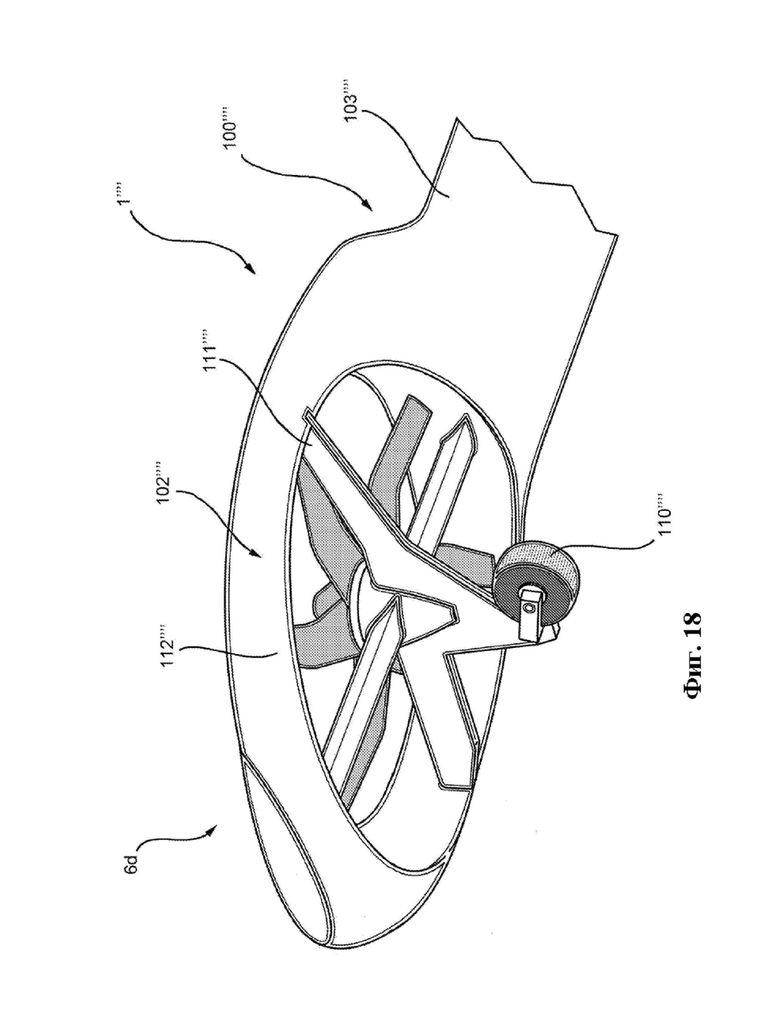
Со ссылкой на Фигуру 17 ссылочная позиция 1'''' обозначает летательный аппарат, выполненный с возможностью вертикального взлета и посадки, согласно пятому варианту выполнения настоящего изобретения.
Летательный аппарат 1'''' аналогичен летательному аппарату 1''', и далее будет описано только отличие от последнего; идентичные или эквивалентные части летательных аппаратов 1''', 1'''' будут отмечены, где это возможно, одинаковыми ссылочными позициями.
Летательный аппарат 1'''' отличается от летательного аппарата 1''' тем, что винты 6a, 6d расположены на свободных концах 102'''' соответственных аэродинамических поверхностей 100''''.
Со ссылкой на Фигуру 18 летательный аппарат 1'''' содержит пару дополнительных передних шасси 110'''', поддерживаемых соответственными аэродинамическими поверхностями 10''''.
В частности, летательный аппарат 1'''' содержит пару рам 111'''', соединенных с соответственными кожухами 112'''' соответственных винтов 6a, 6d и расположенными на соответственных свободных концах 102'''' соответствующих аэродинамических поверхностей 100''''.
Каждая рама 111'''' поддерживает соответственное шасси 110'''' под соответственным кожухом 112''''.
Альтернативно, в другом решении, не показанном на Фигурах, шасси 110'''' содержит шасси полозкового типа с колесом, включенным в конструкцию указанного полозкового шасси.
Шасси 110'''' может быть аналогично шасси традиционного летательного аппарата, например: хвостовое, четырехколесное, трехколесное или многоколесное тележечное шасси.
Эксплуатация летательного аппарата 1'''' аналогична эксплуатации летательного аппарата 1''' и в связи с этим не описана подробно.
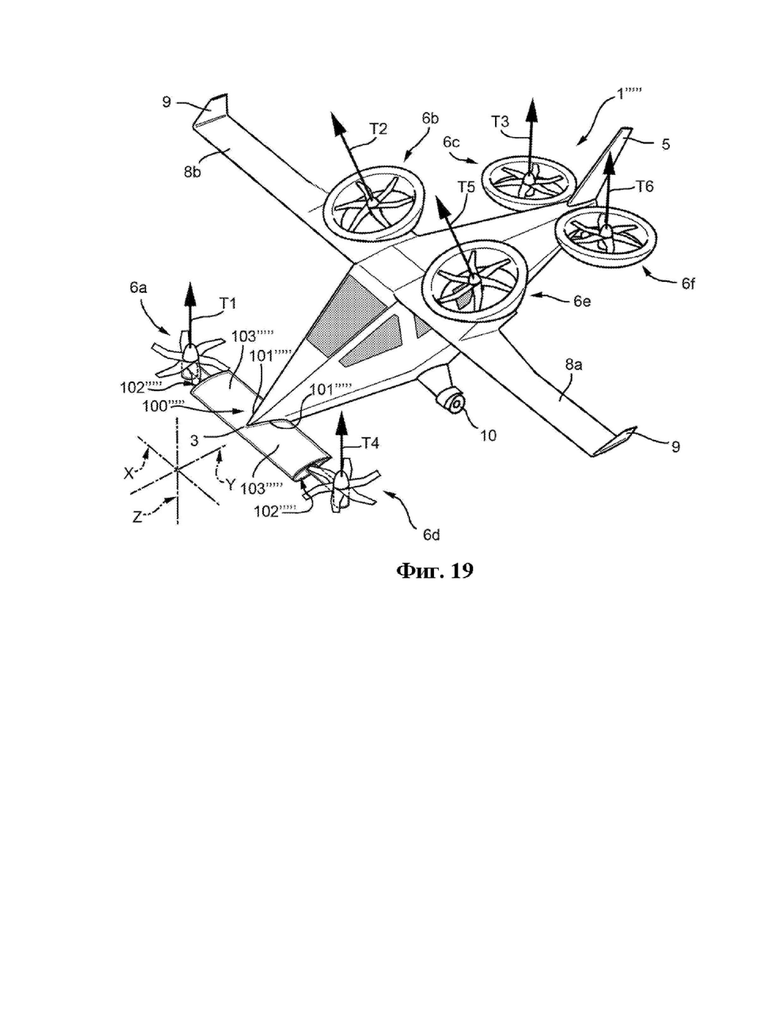
Со ссылкой на Фигуру 19 ссылочная позиция 1''''' обозначает летательный аппарат, выполненный с возможностью вертикального взлета и посадки, согласно шестому варианту выполнения изобретения.
Летательный аппарат 1''''' отличается от летательного аппарата 1'''', и далее будет описано только различие между летательными аппаратами 1'''', 1'''''; идентичные или эквивалентные части летательных аппаратов 1'''', 1''''' будут отмечены, где это возможно, одинаковыми ссылочными позициями.
Летательный аппарат 1''''' отличается от летательного аппарата 1'''' тем, что винты 6a, 6d, удерживаемые на соответственных концах 102''''', не закрыты кожухами.
Более того, летательный аппарат 1''''' отличается от летательного аппарата 1'''' тем, что концы 102''''' являются плоскими и лежат в соответственных плоскостях, перпендикулярных оси X.
Эксплуатация летательного аппарата 1''''' аналогична эксплуатации летательного аппарата 1'''' и в связи с этим не описана подробно.
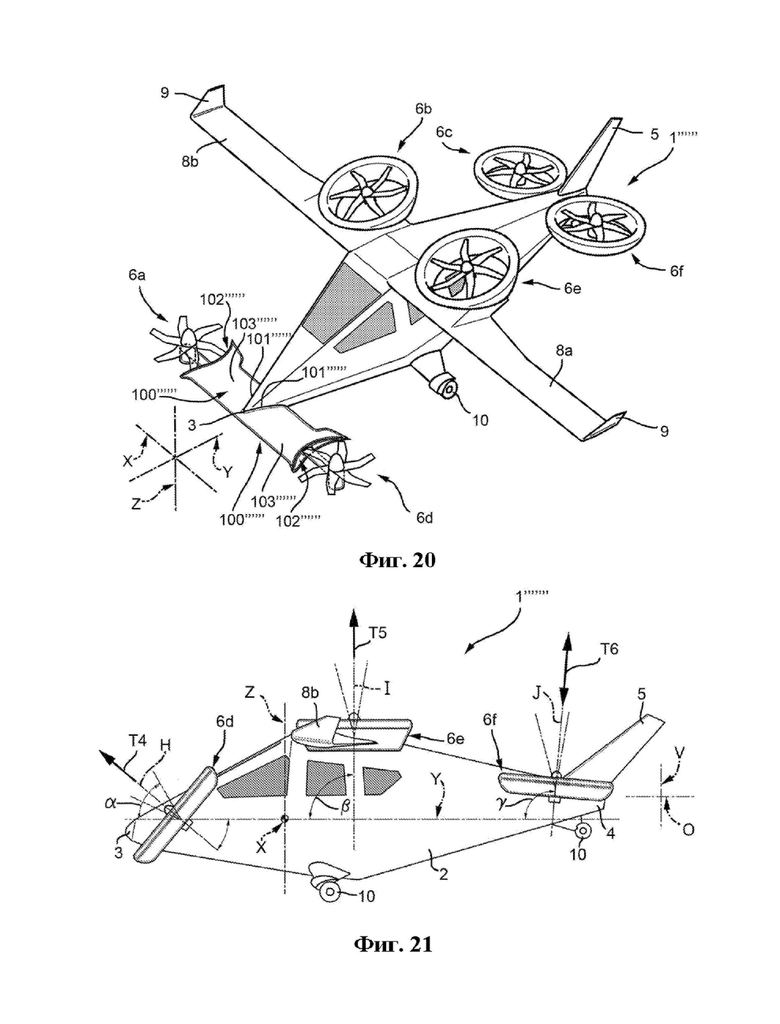
Со ссылкой на Фигуру 20 ссылочная позиция 1'''''' обозначает летательный аппарат, выполненный с возможностью вертикального взлет и посадки, согласно седьмому варианту выполнения настоящего изобретения.
Летательный аппарат 1'''''' аналогичен летательному аппарату 1''''', и далее будет описано только различие между летательными аппаратами 1'''''', 1'''''; идентичные или эквивалентные части летательных аппаратов 1'''''', 1''''' будут отмечены, где это возможно, одинаковыми ссылочными позициями.
Летательный аппарат 1'''''' отличается от летательного аппарата 1''''' тем, что концы 102'''''' имеют поверхности, такие как обтекатели, на противоположной стороне фюзеляжа 2. Более конкретно, обтекатели могут представлять собой участок кожуха летательного аппарата 1'''', показанного на Фигуре 17, или могут представлять собой частичную обшивку для соответственных винтов 6a, 6d. Более того, обтекатели могут быть образованы в виде вогнутой поверхности для того, чтобы равномерно частично охватывать область винтов 6a, 6d.
Эксплуатация летательного аппарата 1'''''' аналогична эксплуатации летательного аппарата 1''''' и в связи с этим не описана подробно.
Со ссылкой на Фигуру 21 ссылочная позиция 1''''''' обозначает летательный аппарат, выполненный с возможностью вертикального взлета и посадки, согласно восьмому варианту выполнения настоящего изобретения.
Летательный аппарат 1''''''' аналогичен летательному аппарату 1, и далее будет описано только различие между летательными аппаратами 1''''''', 1; идентичные или эквивалентные части летательных аппаратов 1''''''', 1 будут отмечены, где это возможно, одинаковыми ссылочными позициями.
Летательный аппарат 1''''''' отличается от летательного аппарата 1 тем, что угол α находится в диапазоне между 25 и 60 градусами и составляет предпочтительно 40 градусов.
Более того, угол β находится в диапазоне между 75 и 105 градусами и составляет предпочтительно 90 градусов.
Наконец, угол γ находится в диапазоне между 75 и 100 градусами и составляет предпочтительно 95 градусов.
Предпочтительно, углы α, β, γ выбираются в соответственных диапазонах таким образом, чтобы отличаться друг от друга.
Предпочтительно, винты 6b, 6e расположены на верхней части фюзеляжа 2. Более конкретно, крылья 8a, 8b выступают из соответственных сторон фюзеляжа 2 на верхней части указанного фюзеляжа 2 относительно оси Z. В качестве дополнительной подробности предпочтительно каждое крыло 8a, 8b выполнено с возможностью удержания, по меньшей мере частично, соответственных винтов 6e и 6b.
Эксплуатация летательного аппарата 1''''''' аналогична эксплуатации летательного аппарата 1 и в связи с этим не описана подробно.
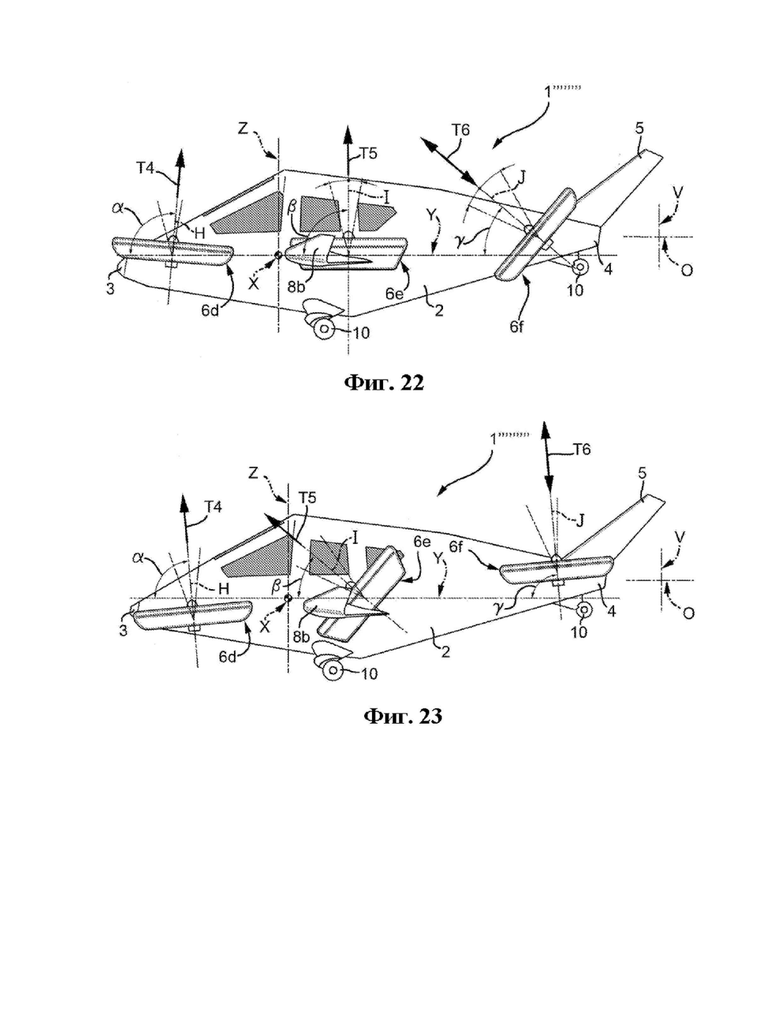
Со ссылкой на Фигуру 22 ссылочная позиция 1'''''''' обозначает летательный аппарат, выполненный с возможностью вертикального взлета и посадки, согласно девятому варианту выполнения настоящего изобретения.
Летательный аппарат 1'''''''' аналогичен летательному аппарату 1, и далее будет описано только различие между летательными аппаратами 1''''''', 1; идентичные или эквивалентные части летательных аппаратов 1'''''''', 1 будут отмечены, где это возможно, одинаковыми ссылочными позициями.
Летательный аппарат 1'''''''' отличается от летательного аппарата 1 тем, что угол α находится в диапазоне между 75 и 100 градусами и составляет предпочтительно 95 градусов.
Более того, угол β находится в диапазоне между 75 и 100 градусами и составляет предпочтительно 90 градусов.
Угол γ находится в диапазоне между 25 и 65 градусами и составляет предпочтительно 45 градусов.
Предпочтительно, углы α, β, γ выбираются в соответственных диапазонах таким образом, чтобы отличаться друг от друга.
Наконец, крылья 8a, 8b выступают из среднего участка соответственных сторон фюзеляжа 2.
Предпочтительно, винты 6b, 6e расположены на верхней части фюзеляжа 2. Более конкретно, крылья 8a, 8b выступают из соответственных сторон фюзеляжа 2 на верхней части фюзеляжа 2 относительно оси Z. В качестве дополнительной подробности предпочтительно каждое крыло 8a, 8b выполнено с возможностью удержания, по меньшей мере частично, соответственных винтов 6e и 6b.
Эксплуатация летательного аппарата 1'''''''' аналогична эксплуатации летательного аппарата 1 и в связи с этим не описана подробно.
Со ссылкой на Фигуру 23 ссылочная позиция 1''''''''' обозначает летательный аппарат, выполненный с возможностью вертикального взлета и посадки, согласно десятому варианту выполнения настоящего изобретения.
Летательный аппарат 1''''''''' аналогичен летательному аппарату 1, и далее будет описано только различие между летательными аппаратами 1''''''''', 1; идентичные или эквивалентные части летательного аппарата 1''''''''', 1 будут отмечены, где это возможно, одинаковыми ссылочными позициями.
Летательный аппарат 1''''''''' отличается от летательного аппарата 1 тем, что угол α находится в диапазоне между 70 и 95 градусами и составляет предпочтительно 85 градусов.
Более того, угол β находится в диапазоне между 25 и 55 градусами и составляет предпочтительно 40 градусов.
Угол γ находится в диапазоне между 65 и 95 градусами и составляет предпочтительно 85 градусов.
Предпочтительно, углы α, β, γ выбираются в соответственных диапазонах таким образом, чтобы отличаться друг от друга.
Предпочтительно винты 6b, 6e расположены в близком положении к оси Y.
Наконец, крылья 8a, 8b выступают из соответственных сторон фюзеляжа 2. Более конкретно, крылья 8a, 8b выступают из соответственных сторон фюзеляжа 2 в близком положении к оси Y. Предпочтительно, каждое крыло 8a, 8b выполнено с возможностью удержания, по меньшей мере частично, соответственных винтов 6e и 6b.
Эксплуатация летательного аппарата 1''''''''' аналогична эксплуатации летательного аппарата 1 и в связи с этим не описана подробно.
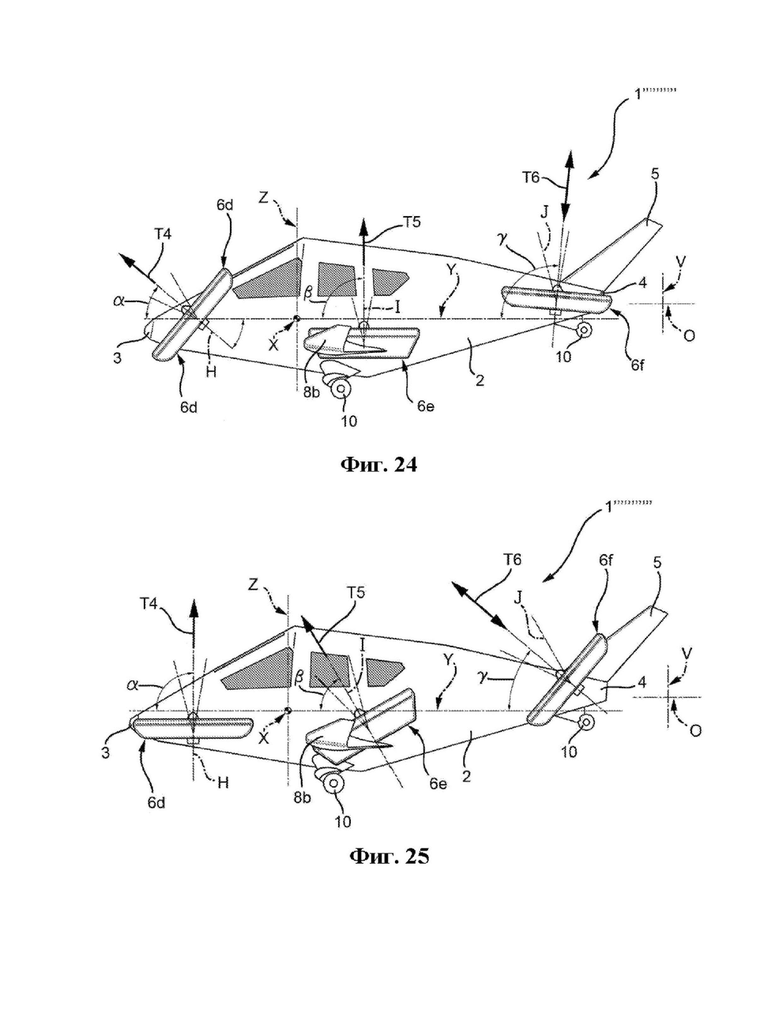
Со ссылкой на Фигуру 24 ссылочная позиция 1'''''''''' обозначает летательный аппарат, выполненный с возможностью вертикального взлета и посадки, согласно одиннадцатому варианту выполнения настоящего изобретения.
Летательный аппарат 1''''''''' аналогичен летательному аппарату 1, и далее будет описано только различие между летательными аппаратами 1''''''''', 1; идентичные или эквивалентные части летательного аппарата 1''''''''', 1 будут отмечены, где это возможно, одинаковыми ссылочными позициями.
Летательный аппарат 1''''''''' отличается от летательного аппарата 1 тем, что угол α находится в диапазоне между 25 и 60 градусами и составляет предпочтительно 40 градусов.
Более того, угол β находится в диапазоне между 75 и 100 градусами и составляет предпочтительно 90 градусов.
Угол γ находится в диапазоне между 75 и 100 градусами и составляет предпочтительно 95 градусов.
Предпочтительно, углы α, β, γ выбираются в соответственных диапазонах таким образом, чтобы отличаться друг от друга.
Предпочтительно, винты 6b, 6e расположены в нижнем положении относительно оси Y. Более предпочтительно, винты 6a, 6d и 6b, 6e расположены в нижнем положении относительно оси Y.
Наконец, крылья 8a, 8b выступают из соответственных сторон фюзеляжа 2 предпочтительно в нижнем положении относительно оси Y или в нижней части указанного фюзеляжа 2.
Эксплуатация летательного аппарата 1''''''''' аналогична эксплуатации летательного аппарата 1 и в связи с этим не описана подробно.
Со ссылкой на Фигуру 25 ссылочная позиция 1''''''''''' обозначает летательный аппарат, выполненный с возможностью вертикального взлета и посадки, согласно двенадцатому варианту выполнения настоящего изобретения.
Летательный аппарат 1''''''''''' аналогичен летательному аппарату 1, и далее будет описано только различие между летательными аппаратами 1''''''''''', 1; идентичные или эквивалентные части летательного аппарата 1''''''''''', 1 будут отмечены, где это возможно, одинаковыми ссылочными позициями.
Летательный аппарат 1''''''''''' отличается от летательного аппарата 1 тем, что угол α находится в диапазоне между 75 и 100 градусами и составляет предпочтительно 90 градусов.
Более того, угол β находится в диапазоне между 45 и 75 градусами и составляет предпочтительно 60 градусов.
Угол γ находится в диапазоне между 25 и 60 градусами и составляет предпочтительно 40 градусов.
Предпочтительно, углы α, β, γ выбираются в соответственных диапазонах таким образом, чтобы отличаться друг от друга.
Предпочтительно, винты 6b, 6e расположены в нижнем положении относительно фюзеляжа 2.
Наконец, крылья 8a, 8b выступают из соответственных сторон фюзеляжа 2 предпочтительно в нижней части указанного фюзеляжа 2.
Эксплуатация летательного аппарата 1''''''''''' аналогична эксплуатации летательного аппарата 1 и в связи с этим не описана подробно.
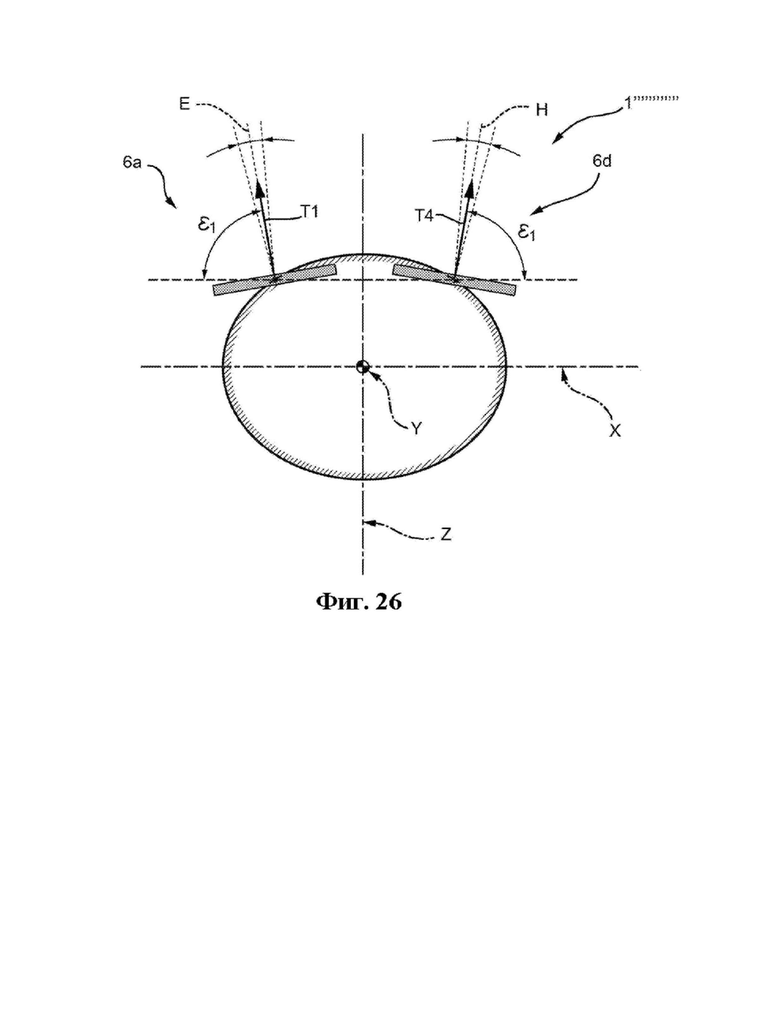
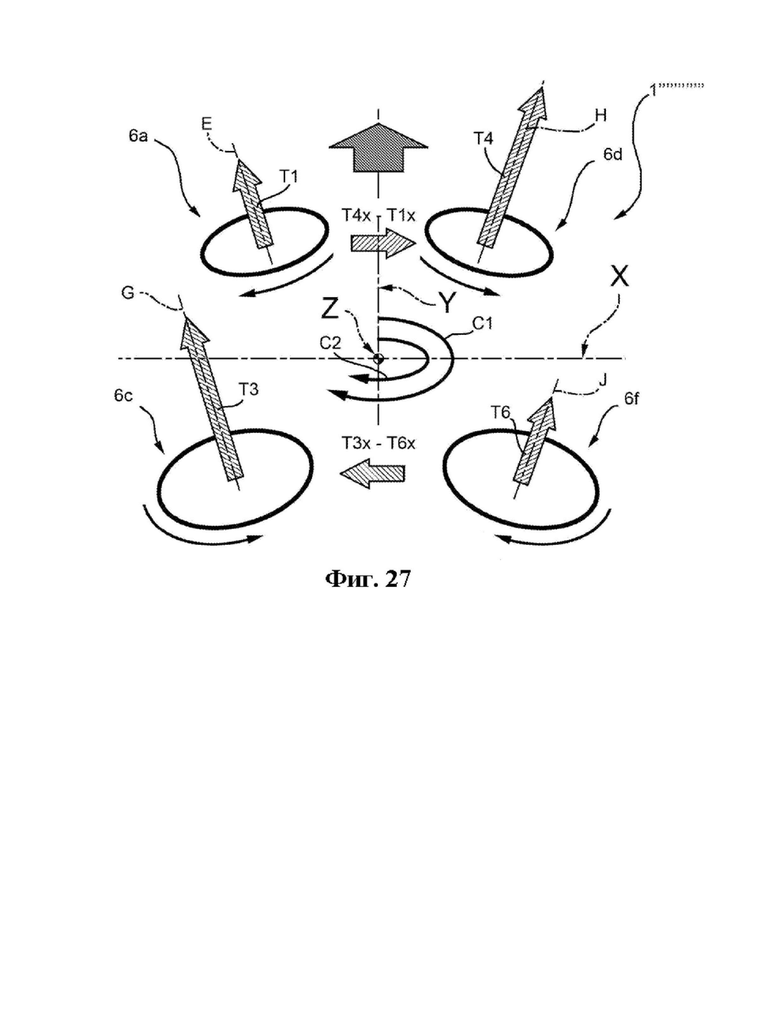
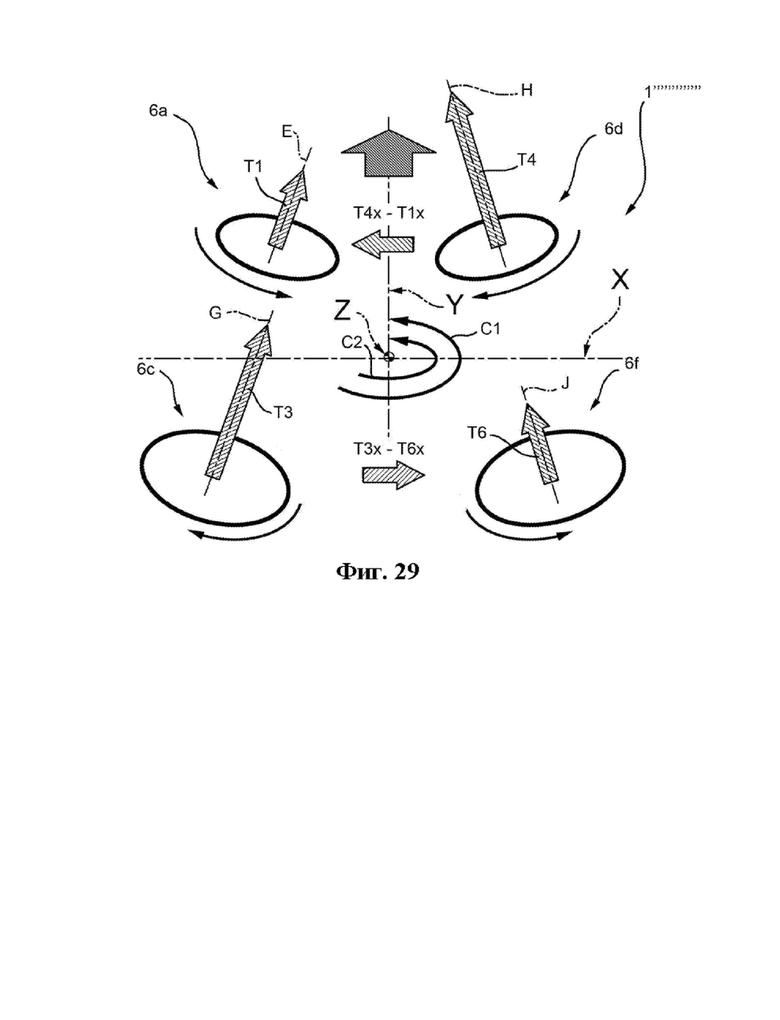
Со ссылкой на Фигуры 26 и 27 ссылочная позиция 1'''''''''''' обозначает летательный аппарат, выполненный с возможностью вертикального взлета и посадки, согласно тринадцатому варианту выполнения настоящего изобретения. Фигура 26 схематически показывает вид сзади летательного аппарата 1''''''''''''.
Летательный аппарат 1'''''''''''' отличается от летательного аппарата 1 тем, что оси E, H винтов 6a, 6d; оси F, I (не показаны) винтов 6b, 6e и оси G, J винтов 6c, 6f наклонены относительно друг друга.
Более подробно, оси E, H; F, I; G, J расположены симметрично относительно оси Z.
Еще точнее, оси E, H; F, I; G, J расходятся друг от друга относительно оси Z, проходя вверх и параллельно от оси Z от шасси 10 по направлению к крыльям 8a, 8b или от нижней части летательного аппарата 1'''''''''''' по направлению к верхней части летательного аппарата 1''''''''''''.
В показанном варианте выполнения оси E, H; F, I и G, J образуют с осью X равный острый угол ε1, находящийся в диапазоне между 75 и 85 градусами и предпочтительно равный 80 градусам.
Эксплуатация летательного аппарата 1'''''''''''' отличается от эксплуатации летательного аппарата 1 тем, что углом рыскания управляют, начиная с конфигурации, в которой тяги T1, T4; T2, T5; T3, T6 не создают никакого момента рыскания, таким образом, что (Фигура 27):
- винт 6a вращается в первом направлении, по часовой стрелке на Фигуре 27, а винт 6d вращается во втором направлении, против часовой стрелки на Фигуре 27;
- винт 6c вращается во втором направлении, а винт 6f вращается в первом направлении;
- тяга T1, создаваемая винтом 6a, принимает первое значение, а тяга T4, создаваемая винтом 6d, принимает второе значение, превышающее первое значение;
- тяга T3, создаваемая винтом 6c, принимает второе значение, а тяга, создаваемая винтом 6d, принимает первое значение.
Таким образом, векторная сумма между тягами T1, T4 имеет первый компонент T4x-T1x в первом направлении, а векторная сумма между тягами T3, T6 имеет компонент T3x-T6x во втором направлении, противоположном первому направлению.
Первый компонент T4x-T1x и второй компонент T3x-T6x, параллельные оси X, создают момент C1 рыскания вокруг оси Z, который позволяет регулировать угол рыскания летательного аппарата 1''''''''''' по необходимости.
Направление результирующего момента C1 рыскания вокруг оси Z зависит от ориентации первого и второго направления.
Более того, благодаря тому, что тяги T4, T3, превышающие тяги T1, T6, создаются соответственными винтами 6d, 6c, вращающимися в одном и том же втором направлении, создается реактивный крутящий момент C2 с компонентом, параллельным оси Z.
Реактивный крутящий момент C2, который ориентирован в том же направлении, что и момент С1 рыскания, облегчает и способствует рысканию летательного аппарата 1'''''''''''.
Более того, винтами 6b, 6e (не показаны на Фигурах 26 и 27) можно удобно управлять таким же образом, что и винтами 6a, 6d или 6c, 6f, при отношении рыскания-угла, требуемом во время конкретной эксплуатации, или, например, при управлении балансом (положением CG (центра масс)) летательного аппарата 1'''''''''''' или для объединения крена вокруг оси Y с рысканием вокруг оси Z. Соответственно, тяги T2, T5 равны тягам T1, T4 (или T3, T6).
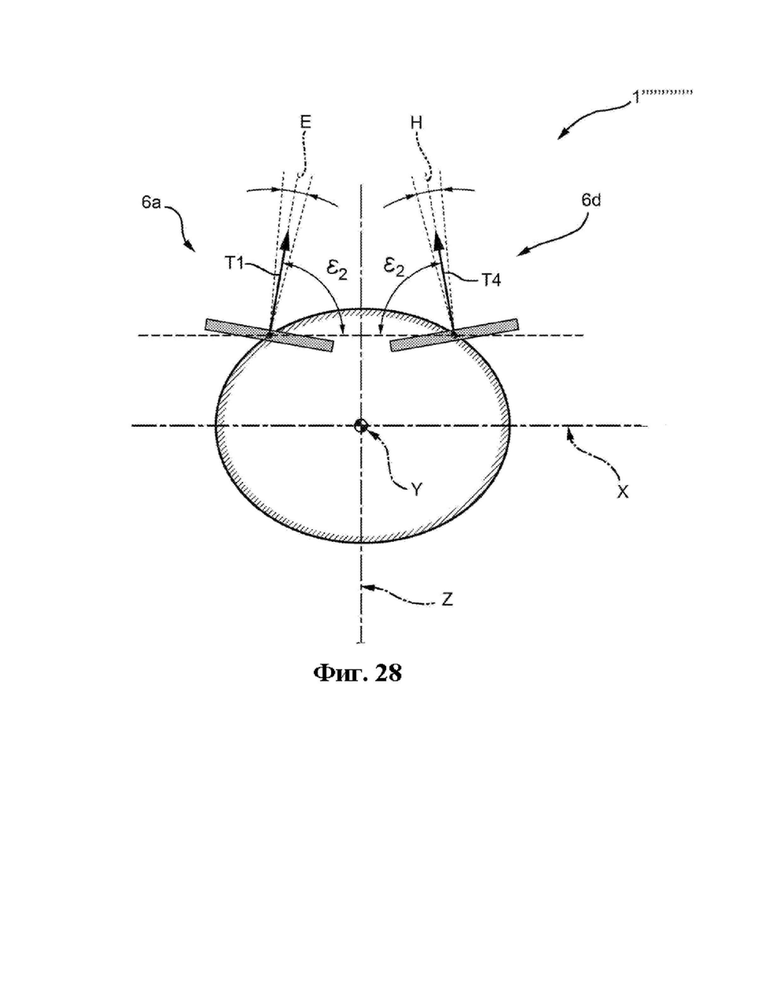
Со ссылкой на Фигуры 28 и 29 ссылочная позиция 1''''''''''''' обозначает летательный аппарат, выполненный с возможностью вертикального взлета и посадки, согласно четырнадцатому варианту выполнения настоящего изобретения.
Летательный аппарат 1''''''''''''' отличается от летательного аппарата 1 тем, что оси E, H; F, I и G, J сходятся по направлению друг к другу относительно оси Z, проходя вверх и параллельно от оси Z от посадочных шасси 10 по направлению к крыльям 8a, 8b или от нижней части летательного аппарата 1''''''''''''' по направлению к верхней части летательного аппарата 1'''''''''''''.
В показанном варианте выполнения оси E, H; F, I и G, J образуют с осью X равный острый угол ε1, находящийся в диапазоне между 75 и 85 градусами и предпочтительно равный 80 градусам.
Эксплуатация летательного аппарата 1''''''''''''' аналогична эксплуатации летательного аппарата 1 и в связи с этим не описана подробно.
Из исследования характеристик летательного аппарата 1, 1', 1''', 1'''', 1''''', 1'''''', 1''''''', 1'''''''', 1''''''''', 1'''''''''', 1''''''''''', 1'''''''''''', 1''''''''''''' и способа управления согласно настоящему изобретению очевидны преимущества, которые могут быть достигнуты с их помощью.
В частности, оси E, F, G, H, I, J, K, L, M и N винтов 6a, 6b, 6c, 6d, 6e, 6f, 6g' b 6h' неподвижны относительно летательного аппарата 1, 1', 1''', 1'''', 1''''', 1'''''', 1''''''', 1'''''''', 1''''''''', 1'''''''''', 1''''''''''', 1'''''''''''', 1'''''''''''''.
Другими словами, летательный аппарат 1, 1', 1''', 1'''', 1''''', 1'''''', 1''''''', 1'''''''', 1''''''''', 1'''''''''', 1''''''''''', 1'''''''''''', 1''''''''''''' может взлетать, садиться, висеть, лететь вперед или принимать любой режим полета без необходимости изменений наклона тяг T1, T2, T3, T4, T5, T6, T7, T8, T9 и T10 в отличие от того, что происходит с вертолетами или конвертопланами, и без необходимости ориентирования направления выхлопных газов двигателя в отличие от того, что происходит с летательным аппаратом VTOL известного типа.
Это связано с тем, что летательный аппарат 1, 1', 1''', 1'''', 1''''', 1'''''', 1''''''', 1'''''''', 1''''''''', 1'''''''''', 1''''''''''', 1'''''''''''', 1''''''''''''' позволяет регулировать вектор T тяги тяг T1, T2, T3, T4, T5, T6, T7, T8, T9 и T10 путем простого изменения их модуля и направления, но без изменения ориентации осей E, F, G, H, I, J, K, L, M и N относительно летательного аппарата 1, 1', 1''', 1'''', 1''''', 1'''''', 1''''''', 1'''''''', 1''''''''', 1'''''''''', 1''''''''''', 1'''''''''''', 1'''''''''''''.
Следовательно, летательный аппарат 1, 1', 1''', 1'''', 1''''', 1'''''', 1''''''', 1'''''''', 1''''''''', 1'''''''''', 1''''''''''', 1'''''''''''', 1''''''''''''' особенно прост в изготовлении и легче, чем летательный аппарат известного типа, обозначенный во вводной части этого описания.
В дополнение, можно управлять креном вокруг оси Y, тангажом вокруг оси X и рысканием вокруг оси Z летательного аппарата 1, 1', 1''', 1'''', 1''''', 1'''''', 1''''''', 1'''''''', 1''''''''', 1'''''''''', 1''''''''''', 1'''''''''''', 1''''''''''''' путем простой регулировки тяг T1, T2, T3, T4, T5, T6, T7, T8, T9 и T10 в обоих первом и втором пространственных положениях. Это позволяет исключать или по меньшей мере существенно уменьшать необходимость в дополнительных поверхностях управления.
Более того, летательный аппарат 1, 1', 1''', 1'''', 1''''', 1'''''', 1''''''', 1'''''''', 1''''''''', 1'''''''''', 1''''''''''', 1'''''''''''', 1''''''''''''' является особенно эффективным. Это связано с тем, что в каждом режиме полета винты 6a, 6b, 6c, 6d, 6e, 6f, 6g' и 6h' способствуют созданию подъемной силы и/или тяги, необходимой для полета летательного аппарата 1, 1', 1''', 1'''', 1''''', 1'''''', 1''''''', 1'''''''', 1''''''''', 1'''''''''', 1''''''''''', 1'''''''''''', 1''''''''''''', и наделяют его маневренностью вокруг осей X-Y-Z. Таким образом, по существу все тяги T1, T2, T3, T4, T5, T6, T7, T8, T9 и T10 полезны для целей эксплуатации летательного аппарата 1, 1', 1''', 1'''', 1''''', 1'''''', 1''''''', 1'''''''', 1''''''''', 1'''''''''', 1''''''''''', 1'''''''''''', 1''''''''''''', уменьшая наличие ненужного аэродинамического сопротивления.
Более того, летательный аппарат 1, 1', 1''', 1'''', 1''''', 1'''''', 1''''''', 1'''''''', 1''''''''', 1'''''''''', 1''''''''''', 1'''''''''''', 1''''''''''''' налагает немного конструктивных ограничений и, таким образом, считается особенно универсальным. Конкретнее, фюзеляжи 2 с разными геометриями и формами и/или разные типы крыльев 8а и 8b и/или приводы внутреннего сгорания или гибридные или гидроприводные приводы для винтов 6a, 6b, 6c, 6d, 6e, 6f, 6g' и 6h' могут быть использованы на летательном аппарате 1, 1', 1''', 1'''', 1''''', 1'''''', 1''''''', 1'''''''', 1''''''''', 1'''''''''', 1''''''''''', 1'''''''''''', 1''''''''''''' без существенного влияния на расположение и размер винтов 6a, 6b, 6c, 6d, 6e, 6f, 6g' и 6h'.
Поскольку винты 6a, 6b, 6c, 6d, 6e, 6f, 6g' и 6h' приводятся в движение и регулируются независимо друг от друга, летательный аппарат 1, 1' особенно пригоден для распределенной электрической двигательной системы с очевидными преимуществами с точки зрения избыточности и уменьшения веса и сложности.
Летательный аппарат 1, 1', 1''', 1'''', 1''''', 1'''''', 1''''''', 1'''''''', 1''''''''', 1'''''''''', 1''''''''''', 1'''''''''''', 1''''''''''''' занимает пространственное положение с более опущенной носовой частью в состояниях полета вперед относительно состояний висения, тем самым предусматривая больший комфорт для пассажиров.
Оси E, H винтов 6a, 6d; оси F, I винтов 6b, 6e и ось G, J винтов 6c, 6f летательного аппарата 1'''''''''''', показанного на Фигурах 26 и 27 (летательного аппарата 1''''''''''''', показанного на Фигурах 28 и 29), расходятся друга от друга (сходятся по направлению друг к другу) относительно оси Z.
Соответственно, можно управлять винтами 6a, 6d так, что первый компонент T4x-T1x векторной суммы тяг T1, T4 направляется в первом направлении, параллельном оси X, а второй компонент T3x-T6x векторной суммы тяг T3, T6 направляется во втором направлении, противоположном первому направлению.
Таким образом, первый компонент T4x-T1x и второй компонент T3x-T6x создают момент С1 рыскания, параллельный оси Z, который может быть использован для управления углом рыскания летательного аппарата 1'''''''''''', 1'''''''''''''.
Более того, так как тяги T4, T3, превышающие тяги T1, T6, создаются винтами 6d, 6c, вращающимися в одном и том же втором направлении, реактивный крутящий момент C2 создается в том же направлении, что и момент С1 рыскания, что увеличивает результирующий момент рыскания и упрощает рыскание летательного аппарата 1'''''''''''', 1'''''''''''''.
Дополнительно, реактивный крутящий момент C2, который создается в том же направлении, что и момент С1 рыскания, позволяет управлять углом рыскания вокруг оси Z летательного аппарата 1'''''''''''', 1''''''''''''' с меньшей энергией, чем в нерасходящейся или несходящейся конфигурации винтов 6a, 6b, 6c, 6d, 6e и 6f летательного аппарата 1.
Наконец, ясно, что могут быть выполнены модификации и вариации летательного аппарата 1, 1', 1''', 1'''', 1''''', 1'''''', 1''''''', 1'''''''', 1''''''''', 1'''''''''', 1''''''''''', 1'''''''''''', 1''''''''''''' и способа управления, изложенных здесь, без отклонения от объема охраны, определенного формулой изобретения.
В частности, летательный аппарат 1, 1', 1''', 1'''', 1''''', 1'''''', 1''''''', 1'''''''', 1''''''''', 1'''''''''', 1''''''''''', 1'''''''''''', 1''''''''''''' может быть выполнен с возможностью либо размещения экипажа в фюзеляже 2, либо удаленного пилотирования, таким образом образуя OVA. В этом последнем случае фюзеляж 2 будет выполнен с возможностью вмещения различных типов оборудования.
Более того, вектор T тяги, необходимый в разных режимах полета, может быть получен посредством векторной суммы тяг T1, T2, T3, T4, T5, T6, T7, T8, T9 и T10, отличных от тех, которые описаны.
Более того, летательный аппарат 1''', 1''''', 1'''''' может содержать не показанное шасси, аналогичное шасси 110''''.
Наконец, оси E, H; F, I; G, J, сходящиеся друг к другу или расходящиеся друг от друга относительно оси Z, могут быть осуществлены исключительно в качестве неограничивающего примера на летательном аппарате 1, 1', 1''', 1'''', 1''''', 1'''''', 1''''''', 1'''''''', 1'''''''''', показанном на фигурах 1, 12, 14, 16, 17, 19, 20, 21, 22, 24.
Изобретение относится к области авиации, в частности к конструкциям летательных аппаратов вертикального взлета и посадки. Летательный аппарат вертикального взлета и посадки содержит первый двигательный блок, выполненный с возможностью создания первой тяги, направленной вдоль первой оси, второй двигательный блок, выполненный с возможностью создания второй тяги, направленной вдоль второй оси, третий двигательный блок, расположенный между указанными первым и вторым двигательными блоками вдоль указанного первого продольного направления (Y). Первый двигательный блок и второй двигательный блок могут эксплуатироваться независимо друг от друга. Первая ось и вторая ось наклонены друг к другу относительно первого продольного направления (Y) и неподвижны относительно летательного аппарата. Третий двигательный блок создает при использовании третью тягу вдоль третьей оси, наклоненную относительно указанного первого продольного направления (Y) под третьим углом (β). Обеспечиваются летные характеристики, сравнимые с конвертопланами, при упрощении конструкции и снижении веса. 2 н. и 30 з.п. ф-лы, 29 ил.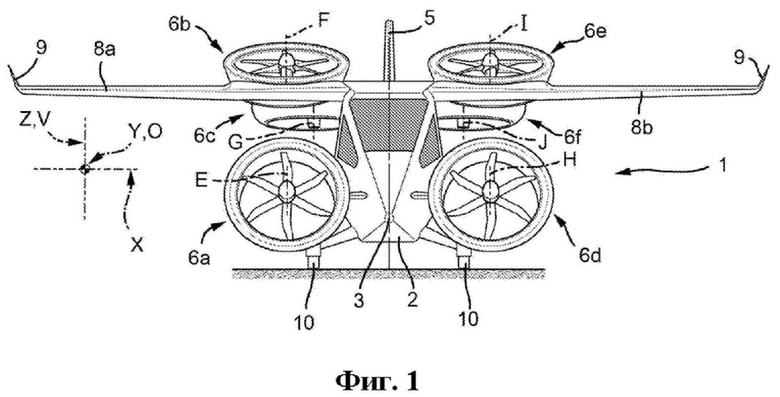
1. Летательный аппарат (1, 1’, 1’’’, 1’’’’, 1’’’’’, 1’’’’’’, 1’’’’’’’, 1’’’’’’’’, 1’’’’’’’’’, 1’’’’’’’’’’, 1’’’’’’’’’’’, 1’’’’’’’’’’’’, 1’’’’’’’’’’’’’, 1’’’’’’’’’’’’’’’), выполненный с возможностью вертикального взлета и посадки, включающий:
- первый двигательный блок (6a, 6b, 6c, 6d, 6e, 6f; 6a, 6b, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6j’, 6f), выполненный с возможностью создания первой тяги (T1, T2, T3, T4, T5, T6; T1, T2, T7, T8, T3, T4, T5, T9, T10, T6), направленной вдоль первой оси (E, F, G, H, I, J; E, F, K, L, G, H, I, M, N, J); и
- второй двигательный блок (6a, 6b, 6c, 6d, 6e, 6f; 6a, 6b, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6j’, 6f), выполненный с возможностью создания второй тяги (T1, T2, T3, T4, T5, T6; T1, T2, T7, T8, T3, T4, T5, T9, T10, T6), направленной вдоль второй оси (E, F, G, H, I, J; E, F, K, L, G, H, I, M, N, J);
при этом указанные первый и второй двигательные блоки (6a, 6b, 6c, 6d, 6e, 6f; 6a, 6b, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6j’, 6f) выполнены с возможностью эксплуатации независимым друг от друга образом так, чтобы создавать указанные первую и вторую тяги (T1, T2, T3, T4, T5, T6; T1, T2, T7, T8, T3, T4, T5, T9, T10, T6) с возможностью независимой регулировки относительно друг друга;
при этом указанные первая ось и вторая ось (E, F, G, H, I, J; E, F, K, L, G, H, I, M, N, J) наклонены друг к другу относительно первого продольного направления (Y) указанного летательного аппарата (1, 1’, 1’’’, 1’’’’, 1’’’’’, 1’’’’’’, 1’’’’’’’, 1’’’’’’’’, 1’’’’’’’’’, 1’’’’’’’’’’, 1’’’’’’’’’’’, 1’’’’’’’’’’’’, 1’’’’’’’’’’’’’);
при этом указанные первая ось и вторая ось (E, F, G, H, I, J; E, F, K, L, G, H, I, M, N, J) соответственных указанных первой тяги и второй тяги (T1, T2, T3, T4, T5, T6; T1, T2, T7, T8, T3, T4, T5, T9, T10, T6) неподвижны относительно указанного летательного аппарата (1, 1’, 1’’’, 1’’’’, 1’’’’’, 1’’’’’’, 1’’’’’’’, 1’’’’’’’’, 1’’’’’’’’’, 1’’’’’’’’’’, 1’’’’’’’’’’’, 1’’’’’’’’’’’’, 1’’’’’’’’’’’’’);
при этом указанный летательный аппарат (1, 1’, 1’’’, 1’’’’, 1’’’’’, 1’’’’’’, 1’’’’’’’, 1’’’’’’’’, 1’’’’’’’’’, 1’’’’’’’’’’, 1’’’’’’’’’’’, 1’’’’’’’’’’’’, 1’’’’’’’’’’’’’) дополнительно содержит носовую часть (3) и хвостовую часть (4), расположенные вдоль указанного первого продольного направления (Y) и противоположные друг другу;
при этом указанный первый двигательный блок (6a, 6b, 6c, 6d, 6e, 6f; 6a, 6b, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6j’, 6f) расположен между указанной носовой частью (3) и указанным вторым двигательным блоком (6a, 6b, 6c, 6d, 6e, 6f; 6a, 6b, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6j’, 6f) вдоль указанного первого продольного направления (Y); при этом указанный второй двигательный блок (6a, 6b, 6c, 6d, 6e, 6f; 6a, 6b, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6j’, 6f) расположен между указанным первым двигательным блоком (6a, 6b, 6c, 6d, 6e, 6f; 6a, 6b, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6j’, 6f) и указанной хвостовой частью (4) вдоль указанного первого продольного направления (Y);
при этом указанные первая ось и вторая ось (E, F, G, H, I, J; E, F, K, L, G, H, I, M, N, J; E, G, H, J) наклонены друг к другу относительно указанного первого продольного направления (Y) указанного летательного аппарата (1, 1’, 1’’’, 1’’’’, 1’’’’’, 1’’’’’’, 1’’’’’’’, 1’’’’’’’’, 1’’’’’’’’’, 1’’’’’’’’’’, 1’’’’’’’’’’’, 1’’’’’’’’’’’’, 1’’’’’’’’’’’’’) под первым и вторым углом (α, γ) соответственно, которые отличаются друг от друга;
при этом указанный первый угол (α) ориентирован от указанной первой оси (E, F, G, H, I, J; E, F, K, L, G, H, I, M, N, J) по направлению к указанной носовой части (3); а указанный второй угол (γ) ориентирован от указанной первой оси (E, F, G, H, I, J; E, F, K, L, G, H, I, M, N, J) по направлению к указанной носовой части (3);
при этом указанный летательный аппарат (1, 1’, 1’’’, 1’’’’, 1’’’’’, 1’’’’’’, 1’’’’’’’, 1’’’’’’’’, 1’’’’’’’’’, 1’’’’’’’’’’, 1’’’’’’’’’’’, 1’’’’’’’’’’’’, 1’’’’’’’’’’’’’) дополнительно содержит блок (17) управления, запрограммированный с возможностью выборочного расположения указанного летательного аппарата (1, 1’, 1’’’, 1’’’’, 1’’’’’, 1’’’’’’, 1’’’’’’’, 1’’’’’’’’, 1’’’’’’’’’, 1’’’’’’’’’’, 1’’’’’’’’’’’, 1’’’’’’’’’’’’, 1’’’’’’’’’’’’’) в:
- первом пространственном положении, занимаемом при использовании во время состояния взлета/посадки и/или висения и в котором указанный летательный аппарат (1, 1’, 1’’’, 1’’’’, 1’’’’’, 1’’’’’’, 1’’’’’’’, 1’’’’’’’’, 1’’’’’’’’’, 1’’’’’’’’’’, 1’’’’’’’’’’’, 1’’’’’’’’’’’’, 1’’’’’’’’’’’’’) выполнен с возможностью перемещения вдоль второго направления (V), которое при использовании расположено вертикально; при этом указанный вектор (T) тяги параллелен указанному второму направлению (V) и направлен вверх в указанном первом пространственном положении; и
- втором пространственном положении, занимаемом при использовании во время состояния полета вперед и в котором указанный летательный аппарат (1, 1’, 1’’’, 1’’’’, 1’’’’’, 1’’’’’’, 1’’’’’’’, 1’’’’’’’’, 1’’’’’’’’’, 1’’’’’’’’’’, 1’’’’’’’’’’’, 1’’’’’’’’’’’’, 1’’’’’’’’’’’’’) выполнен с возможностью перемещения вдоль третьего направления (O), поперечного указанному второму направлению (V); при этом указанный вектор (T) тяги имеет компонент, параллельный указанному третьему направлению (O) и направленный от указанной хвостовой части (4) к указанной носовой части (3), и компонент, параллельный указанному второму направлению (V) и направленный вверх в указанном втором пространственном положении;
при этом указанный летательный аппарат (1, 1’, 1’’’, 1’’’’, 1’’’’’, 1’’’’’’, 1’’’’’’’, 1’’’’’’’’, 1’’’’’’’’’, 1’’’’’’’’’’, 1’’’’’’’’’’’, 1’’’’’’’’’’’’, 1’’’’’’’’’’’’’, 1’’’’’’’’’’’’’) выполнен с возможностью перемещения между указанными первым и вторым пространственными положениями посредством наклона, параллельного третьей оси (X) тангажа;
при этом указанный блок (17) управления запрограммирован с возможностью выборочного расположения указанного летательного аппарата (1, 1’, 1’’’, 1’’’’, 1’’’’’, 1’’’’’’, 1’’’’’’’, 1’’’’’’’’, 1’’’’’’’’’, 1’’’’’’’’’’, 1’’’’’’’’’’’, 1’’’’’’’’’’’’, 1’’’’’’’’’’’’’, 1’’’’’’’’’’’’’) во множестве промежуточных пространственных положений между указанными первым и вторым пространственными положениями и когда указанная тяга (T) имеет компонент, параллельный указанному второму направлению (V), и компонент, параллельный указанному третьему направлению (O);
отличающийся тем, что указанный летательный аппарат (1, 1’, 1’’’, 1’’’’, 1’’’’’, 1’’’’’’, 1’’’’’’’, 1’’’’’’’’, 1’’’’’’’’’, 1’’’’’’’’’’, 1’’’’’’’’’’’, 1’’’’’’’’’’’’, 1’’’’’’’’’’’’’, 1’’’’’’’’’’’’’’’) дополнительно содержит третий двигательный блок (6a, 6b, 6c, 6d, 6e, 6f; 6a, 6b, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6j’, 6f), расположенный между указанными первым и вторым двигательными блоками (6a, 6b, 6c, 6d, 6e, 6f; 6a, 6b, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6j’, 6f) вдоль указанного первого продольного направления (Y);
при этом указанный третий двигательный блок (6a, 6b, 6c, 6d, 6e, 6f; 6a, 6b, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6j’, 6f) создает при использовании третью тягу (T1, T2, T3, T4, T5, T6; T1, T2, T7, T8, T3, T4, T5, T9, T10, T6) вдоль третьей оси (E, F, G, H, I, J; E, F, K, L, G, H, I, M, N, J), наклоненную относительно указанного первого продольного направления (Y) под третьим углом (β);
при этом указанный третий угол (β) ориентирован указанной третьей осью (E, F, G, H, I, J; E, F, K, L, G, H, I, M, N, J) по направлению к указанной носовой части (3);
при этом каждый указанный первый, второй и третий двигательный блок (6a, 6b, 6c, 6d, 6e, 6f; 6a, 6b, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6j’, 6f) содержит соответственный первый, второй и третий винт (6a, 6b, 6c, 6d, 6e, 6f; 6a, 6b, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6j’, 6f), расположенные симметрично на противоположной стороне указанного фюзеляжа (2);
при этом указанный блок (17) управления функционально соединен с указанным первым, вторым и третьим двигательным блоком (6a, 6b, 6c, 6d, 6e, 6f; 6a, 6b, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6j’, 6f) для регулировки модуля и направления соответственных указанных первой, второй и третьей тяг (T1, T2, T3, T4, T5, T6; T1, T2, T7, T8, T3, T4, T5, T9, T10, T6) для создания вектора (T) тяги с желаемым модулем и направлением.
2. Летательный аппарат по п. 1, отличающийся тем, что в указанном первом пространственном положении по меньшей мере один (6a, 6c, 6d, 6f; 6a, 6g’, 6h’, 6c, 6d, 6i’, 6j’, 6f) из указанных первого или второго двигательных блоков (6a, 6b, 6c, 6d, 6e, 6f; 6a, 6b, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6j’, 6f) выполнен с возможностью деактивации, а другой (6b, 6e; 6g’, 6i’) из указанного первого, или второго, или третьего двигательных блоков (6a, 6b, 6c, 6d, 6e, 6f; 6a, 6b, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6j’, 6f) создает при использовании соответственную указанную первую или вторую тягу (T2, T5; T8, T10), параллельную указанному второму направлению (V).
3. Летательный аппарат по п. 1 или 2, отличающийся тем, что в указанном первом пространственном положении указанные первый и второй двигательные блоки (6a, 6c; 6d, 6f) расположены на соответственных взаимно противоположных сторонах относительно указанного второго направления (V) и, в частности, расположены симметрично относительно указанного второго направления (V); при этом указанное второе направление (V) перпендикулярно указанному первому продольному направлению (Y), когда указанный летательный аппарат (1) находится при использовании в указанном втором пространственном положении.
4. Летательный аппарат по п. 3, отличающийся тем, что указанные первый и второй двигательные блоки (6a, 6c; 6d, 6f) выполнены с возможностью управления ими для создания соответственных указанных первой и второй тяг (T1, T3; T4, T6), равных друг другу по модулю.
5. Летательный аппарат по любому из предыдущих пунктов, отличающийся тем, что он включает корпус (2) для полезной нагрузки; при этом указанные первый и второй двигательные блоки (6a, 6b, 6c; 6a, 6b, 6g’, 6h’, 6c) расположены на первой стороне указанного корпуса (2); и тем, что он включает по меньшей мере дополнительный первый двигательный блок и по меньшей мере дополнительный второй двигательный блок (6d, 6e, 6f; 6d, 6e, 6i’, 6j’, 6f), расположенные на второй стороне, противоположной указанной первой стороне, указанного корпуса (2);
и/или отличающийся тем, что указанный первый двигательный блок (6a, 6b, 6c, 6d, 6e, 6f; 6a, 6b, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6j’, 6f) представляет собой винт, выполненный с возможностью вращения вокруг соответственной первой оси (E, F, G, H, I, J; E, F, K, L, G, H, I, M, N, J).
6. Летательный аппарат по любому из вышеупомянутых пунктов, отличающийся тем, что включает дополнительный первый двигательный блок (6a, 6b, 6c, 6d, 6e, 6f; 6a, 6b, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6j’, 6f) и дополнительный второй двигательный блок (6a, 6b, 6c, 6d, 6e, 6f; 6a, 6b, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6j’, 6f);
при этом указанный первый двигательный блок (6a, 6b, 6c, 6d, 6e, 6f; 6a, 6b, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6j’, 6f) и указанный дополнительный первый двигательный блок (6a, 6b, 6c, 6d, 6e, 6f; 6a, 6b, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6j’, 6f) содержат соответственные указанные первые винты (6а, 6d; 6a, 6d), выполненные с возможностью создания соответственных первых тяг, направленных вдоль соответственных первых осей (E, H; E, H); при этом указанные первые винты (6а, 6d; 6a, 6d) выполнены с возможностью вращения вокруг соответственных первых осей (E, H; E, H);
при этом указанный второй двигательный блок (6a, 6b, 6c, 6d, 6e, 6f; 6a, 6b, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6j’, 6f) и указанный дополнительный второй двигательный блок (6a, 6b, 6c, 6d, 6e, 6f; 6a, 6b, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6j’, 6f) содержат соответственные указанные вторые винты (6b, 6e; 6b, 6e), выполненные с возможностью создания соответственных вторых тяг (T2, T5; T2, T5), направленных вдоль соответственных вторых осей (F, I; F, I); при этом указанные вторые винты (6b, 6e; 6b, 6e) выполнены с возможностью вращения вокруг соответственных вторых осей (F, I; F, I);
при этом указанные первые и вторые винты (6а, 6d; 6b, 6e) выполнены с возможностью эксплуатации независимым друг от друга образом так, чтобы создавать указанные первую и вторую тяги (T1, T4, T2, T5; T1, T4, T2, T5) с возможностью независимой регулировки относительно друг друга;
при этом указанный летательный аппарат (1, 1’, 1’’’, 1’’’’, 1’’’’’, 1’’’’’’, 1’’’’’’’, 1’’’’’’’’, 1’’’’’’’’’, 1’’’’’’’’’’, 1’’’’’’’’’’’, 1’’’’’’’’’’’’, 1’’’’’’’’’’’’’) дополнительно содержит:
- фюзеляж (2), образующий указанный корпус (2) и оснащенный указанной носовой частью (3) и указанной хвостовой частью (4); и
- пару крыльев (8a, 8b), расположенных на стороне указанного фюзеляжа (2) и выступающих консольным образом из указанного фюзеляжа (2);
при этом указанные первые винты (6а, 6d; 6a, 6d) расположены между указанной носовой частью (3) и указанными вторыми винтами (6b, 6e; 6b, 6e) вдоль указанного первого продольного направления (Y); при этом указанные вторые винты (6b, 6e; 6b, 6e) расположены между указанными первыми винтами (6а, 6d; 6a, 6d) и указанной хвостовой частью (4) вдоль указанного первого продольного направления (Y);
при этом указанный летательный аппарат (1, 1’, 1’’’, 1’’’’, 1’’’’’, 1’’’’’’, 1’’’’’’’, 1’’’’’’’’, 1’’’’’’’’’, 1’’’’’’’’’’, 1’’’’’’’’’’’, 1’’’’’’’’’’’’, 1’’’’’’’’’’’’’) дополнительно содержит дополнительный третий двигательный блок (6a, 6b, 6c, 6d, 6e, 6f; 6a, 6b, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6j’, 6f);
при этом указанный третий двигательный блок (6a, 6b, 6c, 6d, 6e, 6f; 6a, 6b, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6j’, 6f) и указанный дополнительный третий двигательный блок (6a, 6b, 6c, 6d, 6e, 6f; 6a, 6b, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6j’, 6f) содержат соответственные указанные третьи винты (6c, 6f; 6c, 6f), расположенные между указанными первыми и вторыми винтами (6а, 6d, 6b, 6e; 6a, 6d, 6b, 6e) вдоль указанного первого продольного направления (Y);
при этом указанные третьи винты (6c, 6f; 6c, 6f) создают при использовании соответственные третьи тяги (T3, T6; T3, T6) вдоль соответственных третьих осей (G, J; G, J), наклоненные относительно указанного первого продольного направления (Y) под указанным третьим углом (β); при этом указанные третьи винты (6c, 6f; 6c, 6f) выполнены с возможностью вращения вокруг соответственных третьих осей (G, J; G, J);
при этом указанный третий угол (β) ориентирован указанными третьими осями (G, J; G, J) по направлению к указанной носовой части (3);
при этом указанный летательный аппарат (1, 1’, 1’’’, 1’’’’, 1’’’’’, 1’’’’’’, 1’’’’’’’, 1’’’’’’’’, 1’’’’’’’’’, 1’’’’’’’’’’, 1’’’’’’’’’’’, 1’’’’’’’’’’’’, 1’’’’’’’’’’’’’) располагается в указанном первом пространственном положении посредством первой эксплуатационной конфигурации указанных первых винтов (6а, 6d; 6a, 6d), вторых винтов (6b, 6e; 6b, 6e) и третьих винтов (6c, 6f; 6c, 6f), в которой:
- указанные вторые винты (6b, 6e; 6b, 6e) ориентированы так, что соответственные вторые оси (F, I; F, I) параллельны указанному второму направлению (V), а соответственные вторые тяги (T2, T5; T2, T5) равны друг другу;
- указанные первые винты (6а, 6d; 6a, 6d) ориентированы так, что соответственные первые оси (E, H; E, H) наклонены под четвертым углом (δ1) относительно указанного второго направления (V), а соответственные первые тяги (T1, T4; T1, T4) равны друг другу; и
- указанные третьи винты (6c, 6f; 6c, 6f) ориентированы так, что соответственные третьи оси (G, J; G, J) наклонены под пятым углом (ω1) относительно указанного второго направления (V), а соответственные третьи тяги (T3, T6; T3, T6) равны друг другу;
при этом указанный летательный аппарат (1, 1’, 1’’’, 1’’’’, 1’’’’’, 1’’’’’’, 1’’’’’’’, 1’’’’’’’’, 1’’’’’’’’’, 1’’’’’’’’’’, 1’’’’’’’’’’’, 1’’’’’’’’’’’’, 1’’’’’’’’’’’’’) располагается в указанном втором пространственном положении посредством второй эксплуатационной конфигурации указанных первых винтов (6а, 6d; 6a, 6d), вторых винтов (6b, 6e; 6b, 6e) и третьих винтов (6c, 6f; 6c, 6f), в которой:
- указанные первые винты (6а, 6d; 6a, 6d) ориентированы так, что соответственные первые оси (E, H; E, H) наклонены относительно указанного второго направления (V) под соответственными дополнительными третьими углами (δ2), равными друг другу, и создают соответственные первые тяги (T1, T4; T1, T4), равные друг другу, имеющие одинаковые модули, имеющие первые компоненты, параллельные третьему направлению (O), направленные от указанной хвостовой части (4) к указанной носовой части (3), и первые компоненты, параллельные указанному второму направлению (V);
- указанные вторые винты (6b, 6e; 6b, 6e) ориентированы так, что соответственные указанные вторые оси (F, I; F, I) наклонены относительно указанного второго направления (V) под соответственными четвертыми углами, превышающими соответственные пятые углы (ω2) указанных третьих осей (G, J; G, J) указанных третьих винтов (6c, 6f; 6c, 6f), и создают соответственные тяги (T2, T5; T2, T5), равные друг другу, имеющие одинаковые модули и имеющие вторые компоненты, параллельные указанному третьему направлению (O), и вторые компоненты, параллельные указанному второму направлению (V); и
- указанные третьи винты (6c, 6f; 6c, 6f) ориентированы так, что соответственные третьи оси (G, J; G, J) и соответственные указанные тяги (T3, T6; T3, T6) параллельны указанному второму направлению (V).
7. Летательный аппарат по любому из вышеупомянутых пунктов, отличающийся тем, что он имеет конфигурацию «утка»; при этом указанная конфигурация «утка» содержит пару аэродинамических поверхностей (100’’’, 100’’’’, 100’’’’’, 100’’’’’’), выступающих в боковом направлении из фюзеляжа (2) и в указанной носовой части (3).
8. Летательный аппарат по п. 7, отличающийся тем, что указанные первые винты (6а, 6d) поддерживаются указанными соответственными аэродинамическими поверхностями (100’’’, 100’’’’, 100’’’’’, 100’’’’’’).
9. Летательный аппарат по п. 8, отличающийся тем, что указанные первые винты (6а, 6d) поддерживаются соответственными концами (102’’’, 102’’’’, 102’’’’’, 102’’’’’’) указанных аэродинамических поверхностей (100’’’, 100’’’’, 100’’’’’, 100’’’’’’), противоположными указанному фюзеляжу (2).
10. Летательный аппарат по п. 8, отличающийся тем, что указанные аэродинамические поверхности (100’’’, 100’’’’, 100’’’’’, 100’’’’’’ содержат соответственные свободные концы (102’’’, 102’’’’, 102’’’’’, 102’’’’’’), и тем, что каждый указанный первый винт (6а, 6d) расположен между указанным фюзеляжем (2) и указанным соответствующим свободным концом (102’’’, 102’’’’, 102’’’’’, 102’’’’’’).
11. Летательный аппарат по любому из пп. 8-10, отличающийся тем, что указанные первые винты (6а, 6d) закрыты кожухом.
12. Летательный аппарат по любому из пп. 9-11, отличающийся тем, что указанные соответственные свободные концы (102’’’’’) являются плоскими.
13. Летательный аппарат по любому из пп. 9-11, отличающийся тем, что указанные соответственные концы (102’’’’’’) являются вогнутыми на противоположной стороне относительно указанного фюзеляжа (2).
14. Летательный аппарат по любому из пп. 7-13, отличающийся тем, что включает пару дополнительных шасси (110’’’’), поддерживаемых соответственными указанными аэродинамическими поверхностями (100’’’’).
15. Летательный аппарат по п. 14, отличающийся тем, что указанные дополнительные шасси (110’’’’) расположены под соответственными указанными первыми винтами (6а, 6d).
16. Летательный аппарат по любому из вышеупомянутых пунктов, отличающийся тем, что указанный первый угол (α) находится в диапазоне между 25 и 40 градусами и составляет предпочтительно 40 градусов;
при этом указанный второй угол (γ) находится в диапазоне между 75 и 105 градусами и составляет предпочтительно 90 градусов;
а указанный третий угол (β) находится в диапазоне между 75 и 115 градусами и составляет предпочтительно 95 градусов.
17. Летательный аппарат по любому из пп. 1-15, отличающийся тем, что указанный первый угол (α) находится в диапазоне между 75 и 100 градусами и составляет предпочтительно 95 градусов;
при этом указанный второй угол (γ) находится в диапазоне между 75 и 100 градусами и составляет предпочтительно 90 градусов;
а указанный третий угол (β) находится в диапазоне между 25 и 65 градусами и составляет предпочтительно 45 градусов.
18. Летательный аппарат по любому из пп. 1-15, отличающийся тем, что указанный первый угол (α) находится в диапазоне между 70 и 95 градусами и составляет предпочтительно 85 градусов;
при этом указанный второй угол (γ) находится в диапазоне между 25 и 55 градусами и составляет предпочтительно 40 градусов;
а указанный третий угол (β) находится в диапазоне между 65 и 95 градусами и составляет предпочтительно 85 градусов.
19. Летательный аппарат по любому из пп. 1-15, отличающийся тем, что указанный первый угол (α) находится в диапазоне между 25 и 60 градусами и составляет предпочтительно 40 градусов;
при этом указанный второй угол (γ) находится в диапазоне между 75 и 100 градусами и составляет предпочтительно 90 градусов;
а указанный третий угол (β) находится в диапазоне между 75 и 100 градусами и составляет предпочтительно 95 градусов.
20. Летательный аппарат по любому из пп. 1-15, отличающийся тем, что указанный первый угол (α) находится в диапазоне между 75 и 100 градусами и составляет предпочтительно 90 градусов;
при этом указанный второй угол (γ) находится в диапазоне между 45 и 75 градусами и составляет предпочтительно 60 градусов;
а указанный третий угол (β) находится в диапазоне между 25 и 60 градусами и составляет предпочтительно 40 градусов.
21. Летательный аппарат по любому из вышеупомянутых пунктов, отличающийся тем, что указанные первые оси (E, H), и/или указанные вторые оси (F, I), и/или указанные третьи оси (G, J) наклонены относительно друг друга.
22. Летательный аппарат по п. 21, отличающийся тем, что указанные первые оси (E, H), и/или указанные вторые оси (F, I). и/или указанные третьи оси (G, J) симметричны относительно пятой оси (Z), перпендикулярной указанному первому продольному направлению (Y) и указанной четвертой оси (X).
23. Летательный аппарат по п. 22, отличающийся тем, что указанные первые оси (E, H), и/или указанные вторые оси (F, I), и/или указанные третьи оси (G, J) сходятся или расходятся относительно указанной пятой оси (Z), проходя вверх от шасси (10) до указанного крыла (8a, 8b).
24. Летательный аппарат по п. 23, отличающийся тем, что указанные первые оси (E, H), и/или указанные вторые оси (F, I), и/или указанные третьи оси (G, J) образуют острый шестой угол (ε1) в диапазоне от 75 до 85 градусов с указанной четвертой осью (X); при этом указанный шестой угол (ε1) составляет предпочтительно 80 градусов.
25. Летательный аппарат по любому из вышеупомянутых пунктов, отличающийся тем, что указанный третий угол (β) больше указанного первого угла (α) и меньше указанного второго угла (γ).
26. Способ управления летательным аппаратом (1, 1’, 1’’’, 1’’’’, 1’’’’’, 1’’’’’’, 1’’’’’’’, 1’’’’’’’’, 1’’’’’’’’’, 1’’’’’’’’’’, 1’’’’’’’’’’’, 1’’’’’’’’’’’’, 1’’’’’’’’’’’’’), выполненным с возможностью вертикального взлета и посадки, включающий этапы, на которых:
i) создают первую тягу (T1, T2, T3, T4, T5, T6; T1, T2, T7, T8, T3, T4, T5, T9, T10, T6; T1, T3, T4, T6), направленную вдоль первой оси (E, F, G, H, I, J; E, F, K, L, G, H, I, M, N, J; E, G, H, J), посредством первого двигательного блока (6a, 6b, 6c, 6d, 6e, 6f; 6a, 6b, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6j’, 6f);
ii) создают вторую тягу (T1, T2, T3, T4, T5, T6; T1, T2, T7, T8, T3, T4, T5, T9, T10, T6), направленную вдоль второй оси (E, F, G, H, I, J; E, F, K, L, G, H, I, M, N, J; E, G, H, J), посредством второго двигательного блока (6a, 6b, 6c, 6d, 6e, 6f; 6a, 6b, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6j’, 6f), который может эксплуатироваться независимо от указанного первого двигательного блока (6a, 6b, 6c, 6d, 6e, 6f; 6a, 6b, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6j’, 6f); и
iii) регулируют указанную первую тягу и вторую тягу (T1, T2, T3, T4, T5, T6; T1, T2, T7, T8, T3, T4, T5, T9, T10, T6) независимо друг от друга;
при этом указанные первая ось и вторая ось (E, F, G, H, I, J; E, F, K, L, G, H, I, M, N, J) наклонены друг к другу относительно первого продольного направления (Y) указанного летательного аппарата (1, 1’, 1’’’, 1’’’’, 1’’’’’, 1’’’’’’, 1’’’’’’’, 1’’’’’’’’, 1’’’’’’’’’, 1’’’’’’’’’’, 1’’’’’’’’’’’, 1’’’’’’’’’’’’, 1’’’’’’’’’’’’’);
iv) поддерживают указанные первую и вторую оси (E, F, G, H, I, J; E, F, K, L, G, H, I, M, N, J) соответственных указанных первой и второй тяг (T1, T2, T3, T4, T5, T6; T1, T2, T7, T8, T3, T4, T5, T9, T10, T6) неподвижными относительно указанного летательного аппарата (1, 1’, 1’’’, 1’’’’, 1’’’’’, 1’’’’’’, 1’’’’’’’, 1’’’’’’’’, 1’’’’’’’’’, 1’’’’’’’’’’, 1’’’’’’’’’’’, 1’’’’’’’’’’’’, 1’’’’’’’’’’’’’);
при этом указанный летательный аппарат (1, 1’, 1’’’, 1’’’’, 1’’’’’, 1’’’’’’, 1’’’’’’’, 1’’’’’’’’, 1’’’’’’’’’, 1’’’’’’’’’’, 1’’’’’’’’’’’, 1’’’’’’’’’’’’, 1’’’’’’’’’’’’’) дополнительно содержит носовую часть (3) и хвостовую часть (4), расположенные вдоль указанного первого продольного направления (Y) и противоположные друг другу;
при этом указанный первый двигательный блок (6a, 6b, 6c, 6d, 6e, 6f; 6a, 6b, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6j’, 6f) расположен между указанной носовой частью (3) и указанным вторым двигательным блоком (6a, 6b, 6c, 6d, 6e, 6f; 6a, 6b, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6j’, 6f; 6a, 6c) вдоль указанного первого продольного направления (Y); при этом указанный второй двигательный блок (6a, 6b, 6c, 6d, 6e, 6f; 6a, 6b, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6j’, 6f) расположен между указанным первым двигательным блоком (6a, 6b, 6c, 6d, 6e, 6f; 6a, 6b, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6j’, 6f) и указанной хвостовой частью (4) вдоль указанного первого продольного направления (Y);
при этом указанные первая ось и вторая ось (E, F, G, H, I, J; E, F, K, L, G, H, I, M, N, J) наклонены друг к другу относительно указанного первого продольного направления (Y) указанного летательного аппарата (1, 1’) под первым и вторым углом (α, γ) соответственно, которые отличаются друг от друга;
при этом указанный первый угол (α) ориентирован от указанной первой оси (E, F, G, H, I, J; E, F, K, L, G, H, I, M, N, J) по направлению к указанной носовой части (3); а указанный второй угол (γ) ориентирован от указанной первой оси (E, F, G, H, I, J; E, F, K, L, G, H, I, M, N, J) по направлению к указанной носовой части (3);
при этом указанный первый угол (α) меньше указанного второго угла (γ);
указанный способ дополнительно содержит этап v), на котором регулируют модуль и направление соответственных указанных первой, второй и третьей тяг (T1, T2, T3, T4, T5, T6; T1, T2, T7, T8, T3, T4, T5, T9, T10, T6) для создания вектора (T) тяги с желаемым модулем и направлением посредством блока (17) управления, функционально соединенного с указанным первым, вторым и третьим двигательным блоком (6a, 6b, 6c, 6d, 6e, 6f; 6a, 6b, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6j’, 6f);
при этом указанный блок (17) управления запрограммирован с возможностью выборочного расположения указанного летательного аппарата (1, 1’, 1’’’, 1’’’’, 1’’’’’, 1’’’’’’, 1’’’’’’’, 1’’’’’’’’, 1’’’’’’’’’, 1’’’’’’’’’’, 1’’’’’’’’’’’, 1’’’’’’’’’’’’, 1’’’’’’’’’’’’’) в:
- первом пространственном положении, занимаемом во время состояния взлета/посадки и/или висения и в котором указанный летательный аппарат (1, 1’, 1’’’, 1’’’’, 1’’’’’, 1’’’’’’, 1’’’’’’’, 1’’’’’’’’, 1’’’’’’’’’, 1’’’’’’’’’’, 1’’’’’’’’’’’, 1’’’’’’’’’’’’, 1’’’’’’’’’’’’’) выполнен с возможностью перемещения вдоль второго направления (V), которое при использовании расположено вертикально; при этом указанный вектор (T) тяги параллелен указанному второму направлению (V) и направлен вверх в указанном первом пространственном положении; и
- втором пространственном положении, занимаемом во время состояния полета вперед и в котором указанный летательный аппарат (1, 1’, 1’’’, 1’’’’, 1’’’’’, 1’’’’’’, 1’’’’’’’, 1’’’’’’’’, 1’’’’’’’’’, 1’’’’’’’’’’, 1’’’’’’’’’’’, 1’’’’’’’’’’’’, 1’’’’’’’’’’’’’) выполнен с возможностью перемещения вдоль третьего направления (O), поперечного указанному второму направлению (V); при этом указанный вектор (T) тяги имеет компонент, параллельный указанному третьему направлению (O) и направленный от указанной хвостовой части (4) к указанной носовой части (3), и компонент, параллельный указанному второму направлению (V) и направленный вверх в указанном втором пространственном положении;
при этом указанный этап v) содержит этапы, на которых:
vi) наклоняют указанный летательный аппарат (1, 1’, 1’’’, 1’’’’, 1’’’’’, 1’’’’’’, 1’’’’’’’, 1’’’’’’’’, 1’’’’’’’’’, 1’’’’’’’’’’, 1’’’’’’’’’’’, 1’’’’’’’’’’’’, 1’’’’’’’’’’’’’) вокруг четверной оси (X) тангажа, поперечной указанному первому продольному направлению (Y), для перемещения указанного летательного аппарата (1, 1’, 1’’’, 1’’’’, 1’’’’’, 1’’’’’’, 1’’’’’’’, 1’’’’’’’’, 1’’’’’’’’’, 1’’’’’’’’’’, 1’’’’’’’’’’’, 1’’’’’’’’’’’’, 1’’’’’’’’’’’’’) между указанными первым пространственным положением и вторым пространственным положением;
vii) располагают указанный летательный аппарат (1, 1’, 1’’’, 1’’’’, 1’’’’’, 1’’’’’’, 1’’’’’’’, 1’’’’’’’’, 1’’’’’’’’’, 1’’’’’’’’’’, 1’’’’’’’’’’’, 1’’’’’’’’’’’’, 1’’’’’’’’’’’’’, 1’’’’’’’’’’’’’) во множестве промежуточных пространственных положений между указанными первым и вторым пространственными положениями и когда указанная тяга (T) имеет компонент, параллельный указанному второму направлению (V), и компонент, параллельный указанному третьему направлению (O);
отличающийся тем, что содержит дополнительные этапы, на которых:
viii) располагают третий двигательный блок (6a, 6b, 6c, 6d, 6e, 6f; 6a, 6b, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6j’, 6f) между указанными первым и вторым двигательными блоками (6a, 6b, 6c, 6d, 6e, 6f; 6a, 6b, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6j’, 6f) параллельно указанному первому продольному направлению (Y); при этом каждый указанный первый, второй и третий двигательный блок (6a, 6b, 6c, 6d, 6e, 6f; 6a, 6b, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6j’, 6f) содержит соответственный первый, второй и третий винт (6a, 6b, 6c, 6d, 6e, 6f; 6a, 6b, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6j’, 6f), расположенные симметрично на противоположной стороне указанного фюзеляжа (2); и
ix) создают посредством указанного третьего двигательного блока (6a, 6b, 6c, 6d, 6e, 6f; 6a, 6b, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6j’, 6f) третью тягу (T1, T2, T3, T4, T5, T6; T1, T2, T7, T8, T3, T4, T5, T9, T10, T6) вдоль третьей оси (E, F, G, H, I, J; E, F, K, L, G, H, I, M, N, J), наклоненную относительно указанного первого продольного направления (Y) под третьим углом (β).
27. Способ по п. 26, отличающийся тем, что он включает этап x), на котором деактивируют по меньшей мере один (6a, 6c, 6d, 6f; 6a, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6f) из указанных первого или второго двигательных блоков (6a, 6b, 6c, 6d, 6e, 6f; 6a, 6b, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6j’, 6f) и создают посредством другого (6b, 6e; 6g’, 6i’) из указанных первого, или второго, или третьего двигательных блоков (6a, 6b, 6c, 6d, 6e, 6f; 6a, 6b, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6j’, 6f) соответственную указанную первую или вторую тягу (T2, T5; T8, T10), параллельную указанному второму направлению (V), когда указанный летательный аппарат (1, 1’, 1’’’, 1’’’’, 1’’’’’, 1’’’’’’, 1’’’’’’’, 1’’’’’’’’, 1’’’’’’’’’, 1’’’’’’’’’’, 1’’’’’’’’’’’, 1’’’’’’’’’’’’, 1’’’’’’’’’’’’’) находится в указанном первом пространственном положении.
28. Способ по п. 26 или 27, отличающийся тем, что он включает этап xi), на котором регулируют модули указанных первой и второй тяг (T1, T2, T3, T4, T5, T6; T1, T2, T7, T8, T3, T4, T5, T9, T10, T6) так, чтобы управлять поворотом вокруг указанного первого продольного направления (Y), вокруг четвертого направления (X), поперечного указанному первому продольному направлению (Y) и выполненного за одно целое с указанным летательным аппаратом (1, 1’), и вокруг пятого направления (Z), поперечного указанным четвертому и пятому направлениям (Y, Z).
29. Способ по любому из пп. 26-28, включающий этапы, на которых:
xii) создают соответственные первые тяги (T1, T4; T1, T4), направленные вдоль соответственных первых осей (E, H; E, H), посредством указанного первого двигательного блока (6a, 6b, 6c, 6d, 6e, 6f; 6a, 6b, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6j’, 6f) и дополнительного первого двигательного блока (6a, 6b, 6c, 6d, 6e, 6f; 6a, 6b, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6j’, 6f) с соответственными указанными первыми винтами (6а, 6d; 6a, 6d), выполненными с возможностью вращения вокруг соответственных указанных первых осей (E, H; E, H);
xiii) создают соответственные вторые тяги (T2, T5; T2, T5), направленные вдоль соответственных вторых осей (F, I; F, I), посредством указанного второго двигательного блока (6a, 6b, 6c, 6d, 6e, 6f; 6a, 6b, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6j’, 6f) и дополнительного второго двигательного блока (6a, 6b, 6c, 6d, 6e, 6f; 6a, 6b, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6j’, 6f) с соответственными указанными вторыми винтами (6b, 6e; 6b, 6e), которые могут эксплуатироваться независимо от указанных первых винтов (6а, 6d; 6a, 6d); при этом указанные вторые винты (6b, 6e; 6b, 6e) выполнены с возможностью вращения вокруг указанных соответственных вторых осей (E, F; E, F); и
при этом указанный летательный аппарат (1, 1’) дополнительно содержит:
- фюзеляж (2), оснащенный указанной носовой частью (3) и указанной хвостовой частью (4); и
- пару крыльев (8a, 8b), расположенных на стороне указанного фюзеляжа (2) и выступающих консольным образом из указанного фюзеляжа (2);
при этом указанный способ дополнительно содержит этап xii), на котором располагают указанные третьи винты (6c, 6f; 6c, 6f) соответственного третьего двигательного блока (6a, 6b, 6c, 6d, 6e, 6f; 6a, 6b, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6j’, 6f) и дополнительного двигательного блока (6a, 6b, 6c, 6d, 6e, 6f; 6a, 6b, 6g’, 6h’, 6c, 6d, 6e, 6i’, 6j’, 6f) между указанными первыми винтами (6а, 6d; 6a, 6d) и указанными вторыми винтами (6b, 6e; 6b, 6e) параллельно указанному первому продольному направлению (Y);
xiv) создают посредством указанных третьих винтов (6c, 6f; 6c, 6f) соответственные третьи тяги (T3, T6; T3, T6) вдоль соответственных четвертых осей (G, J; G, J), наклоненные относительно указанного первого продольного направления (Y) под указанным третьим углом (β);
xv) располагают указанный летательный аппарат (1, 1’, 1’’’, 1’’’’, 1’’’’’, 1’’’’’’, 1’’’’’’’, 1’’’’’’’’, 1’’’’’’’’’, 1’’’’’’’’’’, 1’’’’’’’’’’’, 1’’’’’’’’’’’’, 1’’’’’’’’’’’’’) в указанном первом пространственном положении посредством первой эксплуатационной конфигурации указанных первых винтов (6а, 6d), вторых винтов (6b, 6e) и третьих винтов (6c, 6f), в которой:
- указанные вторые винты (6b, 6e) ориентированы так, что соответственные вторые оси (F, I; F, I) параллельны указанному второму направлению (V), а соответственные вторые тяги (T2, T5) равны друг другу,
- указанные первые винты (6а, 6d) ориентированы так, что соответственные первые оси (E, H; E, H) наклонены под первым углом (δ1) относительно указанного второго направления (V), а соответственные первые тяги (T1, T4; T1, T4) равны друг другу; и
- указанные третьи винты (6c, 6f) ориентированы так, что соответственные четвертые оси (G, J; G, J) наклонены под дополнительным вторым углом (ω1) относительно указанного второго направления (V), а соответственные третьи тяги (T3, T6; T3, T6) равны друг другу;
xvi) располагают указанный летательный аппарат (1, 1’, 1’’’, 1’’’’, 1’’’’’, 1’’’’’’, 1’’’’’’’, 1’’’’’’’’, 1’’’’’’’’’, 1’’’’’’’’’’, 1’’’’’’’’’’’, 1’’’’’’’’’’’’, 1’’’’’’’’’’’’’) в указанном втором пространственном положении посредством второй эксплуатационной конфигурации указанных первых винтов (6а, 6d), вторых винтов (6b, 6e) и третьих винтов (6c, 6f), в которой:
- указанные первые винты (6а, 6d) ориентированы так, что соответственные первые оси (E, H) наклонены относительно указанного второго направления (V) под соответственными дополнительными третьими углами (δ2), равными друг другу, и создают соответственные первые тяги (T1, T4), равные друг другу, имеющие одинаковые модули, имеющие первые компоненты, параллельные третьему направлению (O), направленные от указанной хвостовой части (4) к указанной носовой части (3), и первые компоненты, параллельные указанному второму направлению (V);
- указанные вторые винты (6b, 6e) ориентированы так, что соответственные указанные вторые оси (F, I) наклонены относительно указанного второго направления (V) под соответственными четвертыми углами, превышающими соответствующие пятые углы (ω2) указанных третьих осей (G, J) указанных третьих винтов (6c, 6f; 6c, 6f), и создают соответственные вторые тяги (T2, T5; T2, T5), равные друг другу, имеющие одинаковые модули и имеющие вторые компоненты, параллельные указанному третьему направлению (O), и вторые компоненты, параллельные указанному второму направлению (V); и
- указанные третьи винты (6c, 6f; 6c, 6f) ориентированы так, что соответственные третьи оси (G, J; G, J) и соответственные указанные тяги (T3, T6; T3, T6) параллельны указанному второму направлению (V).
30. Способ по п. 29, в котором один (6а) из указанных первых винтов (6а; 6d) и один (6c) из указанных третьих винтов (6c; 6f) располагают на одной и той же первой стороне указанного фюзеляжа (2),
при этом другой (6d) из указанных первых винтов (6а; 6d) и другой (6f) из указанных третьих винтов (6c; 6f) располагают на одной и той же второй стороне, противоположной указанной первой стороне, указанного фюзеляжа (2);
при этом указанный способ содержит этапы, на которых:
xvii) управляют указанной первой тягой (T1, T4), создаваемой указанными первыми винтами (6а; 6d), так, чтобы создавать четвертую дифференциальную тягу (T4x-T1x) вдоль указанного четвертого направления (X); и
xviii) управляют указанной тягой (T3, T6), создаваемой указанными третьими винтами (6c; 6f) так, чтобы создавать пятую дифференциальную тягу (T3x-T6x), направленную противоположно указанной четвертой дифференциальной тяге (T4x-T1x) и вдоль указанного четвертого направления (X);
при этом указанные четвертая и пятая дифференциальные тяги (T4x-T1x; T3x-T6x) создают крутящий момент вдоль указанной пятой оси (Z) на указанном летательном аппарате (1’’’’’’’’’’’’, 1’’’’’’’’’’’’’).
31. Способ по п. 30, отличающийся тем, что включает этапы, на которых:
xix) приводят указанный один (6а) из указанных первых винтов (6а; 6d) и указанный другой (6f) из указанных третьих винтов (6c; 6f) во вращение в одном и том же направлении и с одним и тем же первым значением четвертой тяги (T1); и
xx) приводят указанный другой (6d) из указанных первых винтов (6а; 6d) и указанный один (6c) из указанных третьих винтов(6c; 6f) во вращение в одном и том же дополнительном направлении, противоположном направлению вращения указанного одного (6а) из указанных первых винтов (6а; 6d) и указанного другого (6f) из указанных третьих винтов (6c; 6f), и с одним и тем же вторым значением тяги (T3, T4), превышающим указанное одно и то же первое значение.
32. Способ по любому из пп. 26-31, отличающийся тем, что указанный третий угол (β) больше указанного первого угла (α) и меньше указанного второго угла (γ).
| WO 2018038822 A1, 01.03.2018 | |||
| CN 105539835 A, 04.05.2016 | |||
| US 9764833 B1, 19.09.2017 | |||
| ВЫПОЛНЕННЫЙ С ВОЗМОЖНОСТЬЮ ВЕРТИКАЛЬНОГО ВЗЛЕТА ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2016 |
|
RU2674224C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2015 |
|
RU2619976C2 |

