Данное изобретение относится к выполненному с возможностью вертикального взлета летательному аппарату, подобному, например, квадрокоптеру.
Для многих приложений является желательным иметь в распоряжении летательный аппарат, который может стартовать с минимально малой поверхности и, таким образом, например, не нуждается в каком-либо специальном аэродроме большой площади. Кроме того, имеется потребность в летательном аппарате для особых целей использования, который является поворотливым, и способен точно маневрировать, и который, предпочтительно, способен висеть в воздухе и иметь при этом хорошие летные характеристики в режиме висения.
Например, для воздушного мониторинга и авиаразведки применяют летательные аппараты, которые должны висеть в воздухе над интересующей целью и способны при этом, например, делать аэрофотоснимки. В альтернативном приложении летательный аппарат со способностью вертикального взлета, иногда называемый также самолетом вертикального взлета и посадки, может быть применен для подлета в труднодоступные для людей или для иных машин области, например, в рамках миссий по предупреждению чрезвычайных ситуаций и ликвидации их последствий, с целью транспортировки в такие области, например, таких грузов, как инструменты, продукты питания или медикаменты.
В том числе для таких использований разрабатывались летательные аппараты, в которых четыре или более оснащенных воздушным винтом и приводящим его в движение двигателем винта в каждом случае обеспечивают направленное по существу вертикально вверх тяговое усилие, для предоставления таким образом летательному аппарату возможности вертикального подъема или же зависания в воздухе. Снабженный четырьмя такими винтами летательный аппарат также называют четырехвинтовым вертолетом, квадрокоптером, квадрикоптером, квадроротором или летающей платформой. В общем, такие летательные аппараты с более чем тремя обеспечивающими подъемную силу винтами называют мультикоптерами, причем, наряду с квадрокоптерами, также являются употребительными варианты с тремя винтами (трикоптер), шестью винтами (гексакоптер) или восемью винтами (октокоптер). Такие летательные аппараты приводятся в действие в большинстве случаев беспилотным способом и, в соответствии с этим, могут быть выполнены малыми. В отдельных случаях, эти летательные аппараты обозначаются также как дроны.
За счет небольшого наклона всего летательного аппарата или же одного или нескольких винтов относительно горизонтали, в таких летательных аппаратах также может быть обеспечена определенная движущая сила за счет наклоненного относительно вертикали созданного винтами тягового усилия. В квадрокоптере и мультикоптере при приведении их в действие с помощью электродвигателей наклон зачастую регулируют посредством системы управления числом оборотов электродвигателей. То есть, система управления и стабилизации летательного аппарата регулирует тяговые усилия отдельных воздушных винтов посредством чисел оборотов. Тем самым можно манипулировать отдельными тяговыми усилиями таким образом, что летательный аппарат может подниматься и опускаться или же может наклоняться вперед, назад или вбок. Посредством таких целенаправленных изменений числа оборотов изменяются, однако, не только тяговые усилия, но и крутящие моменты или же вращающие импульсы двигателей и воздушных винтов. Вследствие этого образуется крутящий момент относительно вертикальной оси системы. Этот крутящий момент может действовать в направлении по часовой стрелке, или же в направлении против часовой стрелки. Тем самым является возможным управление относительно вертикальной оси летательного аппарата. При этом в таких электрически приводимых в действие мультикоптерах без изменения угла наклона лопастей используют изменение вращающего импульса или вращения.
Тем не менее, такие летательные аппараты имеют тот недостаток, что с увеличением размеров летательного аппарата возрастают затруднения по достаточно сильному изменению вращающего импульса.
На основании изложенного целью изобретения является предоставление улучшенного летательного аппарата.
Эта цель достигнута в летательном аппарате, имеющем несущую конструкцию и по меньшей мере четыре несущих винта, каждый которых закреплен на несущей конструкции и имеет по меньшей мере один воздушный винт, причем несущие винты выполнены таким образом, что плоскость вращения, в которой вращается по меньшей мере один воздушный винт несущего винта, расположена относительно образованной несущей конструкцией плоскости с наклоном, обеспечивающим создание горизонтальной тяговой компоненты, используемой для управления летательным аппаратом относительно его вертикальной оси, отличающийся тем, что плоскость вращения воздушного винта наклонена перпендикулярно продольной оси летательного аппарата, проходящей в основном направлении его полета, причем изменение вращающих импульсов, обусловленное изменением числа оборотов, т.е. скорости вращения, несущих винтов, и указанная горизонтальная тяговая компонента действуют в одном направлении, вследствие чего крутящий момент, создаваемый за счет изменения вращающих импульсов, усиливается горизонтальной тяговой компонентой.
В основе изобретения лежит идея использования возникающего за счет крена или же наклона плоскостей вращения воздушного винта синусового эффекта. Наряду с первоначальной подъемной компонентой, посредством отклонения плоскостей вращения образуется тяговая компонента, перпендикулярная подъемной компоненте. Эта тяговая компонента действует перпендикулярно подъемной компоненте и усиливает вращающий импульс летательного аппарата при изменении числа оборотов соответствующего несущего винта. Посредством усиления вращающего импульса летательный аппарат может лучше управляться, точнее выражаясь, управление может быть достигнуто посредством уже менее значительной затраты сил, или же больший летательный аппарат может управляться при той же самой затрате сил.
Предпочтительно, плоскость вращения воздушного винта наклонена относительно образованной несущей конструкцией плоскости вовнутрь или наружу. Отклонение плоскости вращения, предпочтительно, производится, при рассмотрении из центра летательного аппарата, вовнутрь или наружу, то есть при направлении взгляда на летательный аппарат сверху, при нормальной направленности летательного аппарата или же полетном положении, к центру тяжести летательного аппарата или же прочь от центра тяжести летательного аппарата.
Предпочтительно, плоскость вращения воздушного винта наклонена перпендикулярно продольной оси в основном направлении полета летательного аппарата вовнутрь или наружу. Для отклонения является выгодным, когда имеется преимущественное направление. Предпочтительно, воздушные винты всех несущих винтов летательного аппарата имеют одинаковое направление поворота, то есть плоскости вращения всех воздушных винтов наклоняются либо наружу, либо вовнутрь. При этом плоскости вращения всех воздушных винтов могут быть наклонены в равной мере на одинаковый угол. Альтернативно, плоскости вращения, предпочтительно, двух диагонально противолежащих несущих винтов также могут быть наклонены на отличный угол по отношению, например, к двум другим несущим винтам.
Летательный аппарат, предпочтительно, имеет основное направление полета, которое задает продольную ось летательного аппарата. При почти осесимметричной конструкции летательного аппарата, то есть при наличии центрального фюзеляжа и, например, четырех расположенных под углом 90° на нем несущих винтов, основное направление полета задается ориентацией вышеназванной продольной оси. При вытянутой конструкции летательного аппарата летательный аппарат имеет, как правило, основное направление полета, причем не должно быть исключено, что летательный аппарат способен летать также навстречу настоящему основному направлению полета или же в другом направлении.
Для достижения усиления вращающего импульса посредством отклонения плоскости вращения воздушных винтов заданное направление является выгодным, поскольку при радиальном отклонении вовнутрь или же наружу эффект устраняется. Посредством отклонения плоскости вращения воздушных винтов перпендикулярно продольной оси летательного аппарата, то есть перпендикулярно основному направлению полета летательного аппарата, образуется, предпочтительно, горизонтальная тяговая компонента, которая может быть использована для изменения курса летательного аппарата, т.е. управления по рысканию. В противоположность обычному чистому изменению вращающего импульса для изменения курса посредством изменения числа оборотов, посредством одновременного наклонения плоскости вращения воздушных винтов усиливается крутящий момент, и вследствие этого можно просто изменять курс даже больших летательных аппаратов, то есть поворачивать их относительно вертикальной оси. Предпочтительно, посредством создаваемой за счет отклонения плоскости вращения горизонтальной тяговой компоненты и изменения вращающего импульса создается крутящий момент, который, предпочтительно, действует в том же самом направлении. Это дает то преимущество, что создаваемый посредством изменения вращающего импульса крутящий момент усиливается посредством горизонтальной тяговой компоненты.
Предпочтительно, отклонение является постоянным. Предпочтительно, величину отклонения предварительно задают или она является постоянной. Это дает то преимущество, что шарнирные соединения или тому подобные приспособления для отклонения несущих винтов не являются необходимыми.
Предпочтительно, сумма создаваемых несущими винтами подъемных сил проходит по существу через центр тяжести летательного аппарата. Для обеспечения возможности изменения курса летательного аппарата относительно центра тяжести летательного аппарата сумма создаваемых несущими винтами подъемных сил реализуется таким образом, что в каждом случае пара несущих винтов выбирается таким образом, что они располагаются диагонально противоположно по отношению к центру тяжести летательного аппарата. Точнее выражаясь, например, в квадрокоптере, то есть в летательном аппарате с четырьмя несущими винтами, в каждом случае два противоположных относительно центра тяжести квадрокоптера, то есть диагонально противолежащих по отношению к центру тяжести, несущих винта образуют пару. Оба несущих винта в составе пары несущих винтов, предпочтительно, управляются в каждом случае аналогичным образом. Другая пара несущих винтов соответствующим образом контруправляется, то есть при повышении числа оборотов первой пары винтов для создания крутящего момента производится соответствующее понижение числа оборотов второй пары винтов для поддержания, например, летательного аппарата в режиме висения на той же самой высоте. Посредством повышения числа оборотов первой пары винтов, наряду с моментом тягового усилия, в направлении вращения повышается также и подъемная сила. Для противодействия, например, при полете в режиме висения этой подъемной силе число оборотов второй пары винтов соответствующим образом понижается. Вследствие этого, подъемные силы компенсируются и крутящий момент второй пары винтов, кроме того, уменьшается, то есть противонаправленный момент тягового усилия первой пары винтов действует менее сильно в требуемом направлении вращения.
Предпочтительно, посредством изменения числа оборотов по меньшей мере двух диагонально противолежащих по отношению к центру тяжести летательного аппарата несущих винтов является создаваемым крутящий момент относительно вертикальной оси летательного аппарата. Воздушные винты, предпочтительно, наклоняются таким образом, что они могут создавать крутящий момент относительно вертикальной оси.
Предпочтительно, сумма созданных посредством несущих винтов крутящих моментов в полете в режиме висения близка к нулю. Таким образом, при беспрепятственном полете в режиме висения разность сил устраняется. Тем самым результирующий крутящий момент и результирующая сила в плоскости X-Y равны нулю.
Предпочтительно, летательный аппарат при созданной посредством несущих винтов не равной нулю сумме крутящих моментов является вращаемым относительно нормальной оси. При целенаправленном регулировании числа оборотов, или же при изменении тягового усилия образуется пара сил, которая в каждом случае создает крутящий момент относительно вертикальной оси. Напротив, сумма всех сил в плоскости X-Y остается равной нулю.
Предпочтительно, в каждом случае два диагонально противолежащих несущих винта имеют противоположное по отношению по меньшей мере к двум другим диагонально противолежащим несущим винтам направление вращения. За счет различного направления вращения летательный аппарат может удерживаться в полете в режиме висения без того, что летательный аппарат как таковой постоянно вращается вокруг вертикальной оси. Например, несущие винты обеих пар винтов в квадрокоптере создают направленные навстречу друг другу крутящие моменты таким образом, что летательный аппарат не имеет собственного вращения. Только при изменении числа оборотов по меньшей мере одной пары винтов создается требуемый крутящий момент, и летательный аппарат вращается, как это требуется, относительно вертикальной оси, то есть его курс изменяется.
Предпочтительно, посредством отклонения плоскости вращения несущих винтов реализована тяговая компонента перпендикулярно подъемной компоненте.
Предпочтительно, увеличенный посредством тяговой компоненты крутящий момент несущего винта тем больше, чем далее несущий винт удален от центра тяжести летательного аппарата в направлении продольной оси летательного аппарата. Если расстояние наклоненных несущих винтов в направлении продольной оси от центра тяжести, то есть параллельно продольной оси, равно нулю, то есть несущие винты располагаются в центре тяжести или поблизости от него, тяговые компоненты действуют в центре тяжести перпендикулярно основному направлению полета. Вследствие этого не образуется никакого, или образуется только очень незначительный крутящий момент, который может быть применен для поворотов летательного аппарата относительно вертикальной оси. Чем больше расстояние несущих винтов в направлении продольной оси от центра тяжести летательного аппарата, тем больше действие момента тягового усилия, который может быть использован посредством отклонения плоскости вращения несущих винтов.
Предпочтительно, несущие винты выполнены таким образом, что плоскость вращения является стационарной по отношению к приводимой в действие двигателем винтовой оси несущего винта.
Предпочтительно, лопасти воздушного винта несущего винта жестко соединены с винтовой осью. За счет жесткого соединения лопастей воздушного винта несущего винта с винтовой осью является возможным простая конструкция несущего винта. Изменения подъемной силы при этом достигают посредством изменения числа оборотов, но не посредством регулирования, то есть поворота лопастей воздушного винта относительно продольной оси лопастей воздушного винта.
Предпочтительно, каждый из несущих винтов может приводиться в действие электродвигателем. Электрическая энергия для электродвигателей может поставляться при этом посредством центрального генератора, с помощью, например, двигателя внутреннего сгорания, или посредством батареи. Например, посредством центрального генератора, например, двигателя внутреннего сгорания, может приводиться в действие дополнительный привод, такой как, например, тяговый привод с толкающим воздушным винтом или с тянущим воздушным винтом. Тяговый привод может приводиться в действие при этом, например, посредством вала двигателя внутреннего сгорания или посредством электродвигателя.
Летательный аппарат вертикального взлета и посадки является предпочтительным. Самолет вертикального взлета и посадки может использовать несущие винты летательного аппарата для взлета и посадки. Для тягового привода в крейсерском полете может использоваться, например, дополнительный толкающий или тянущий привод.
Предпочтительно, летательный аппарат является пилотируемым или беспилотным летательным аппаратом.
Как правило, на чертежах одинаковые ссылочные обозначения относятся к одинаковым деталям на различных видах. Чертежи, в силу необходимости, выполнены не в соответствии масштабу, вместо этого, основное внимание уделено наглядности отображения принципов изобретения. В последующем описании различные варианты осуществления изобретения описываются со ссылками на следующие чертежи, в числе которых:
Фиг. 1 показывает первый вариант осуществления летательного аппарата на трехмерном виде,
Фиг. 2 показывает различные виды упрощенного представления. варианта осуществления летательного аппарата,
Фиг. 3 показывает представление сил для варианта осуществления летательного аппарата,
Фиг. 4 показывает распределение сил при различных маневрах в полете для упрощенного представления варианта осуществления летательного аппарата,
Фиг. 5 показывает представление результирующих сил для варианта осуществления летательного аппарата, и
Фиг. 6 показывает представление концепции управления для варианта осуществления летательного аппарата.
Последующее подробное описание опирается на приложенные чертежи, которые для разъяснения показывают специфические детали и варианты осуществления, в которых может практиковаться изобретение.
Термин «примерный» применяется здесь со значением «служащий в качестве примера, случая или иллюстрации». Какие-либо варианты осуществления или формы выполнения, которые здесь обозначены «примерными», не обязательно являются предпочтительными или выгодными по отношению к другим вариантам осуществления или формам выполнения.
В последующем подробном описании сделаны ссылки на приложенные чертежи, которые образуют часть настоящего описания, и в которых для иллюстрации показаны специфические варианты осуществления, в которых изобретение может быть выполнено. В этом отношении терминология направления, как например, «наверху», «внизу», «впереди», «позади», «переднее», «заднее» и т.д. применяется со ссылками на ориентацию описываемого чертежа (чертежей). Поскольку компоненты вариантов осуществления могут быть позиционированы в нескольких различных ориентациях, терминология направления служит для иллюстрации, и не является ни в коей мере ограничительной. Очевидно, что другие варианты осуществления могут быть использованы, а также структурные или логические изменения произведены без выхода за пределы объема правовой охраны данного изобретения. Очевидно, что признаки описанных здесь различных примерных вариантов осуществления могут комбинироваться друг с другом, если иное специально не указано. Поэтому последующее подробное описание не следует понимать в ограничительном смысле, а объем правовой охраны данного изобретения задается посредством дополнительных пунктов формулы изобретения.
В рамках настоящего описания понятия «соединенный», «присоединенный», а также «связанный» применяются для описания как непосредственного, так и опосредованного соединения, непосредственного или опосредованного присоединения, а также непосредственного или опосредованного связывания. На чертежах идентичные или похожие элементы снабжены, в рамках целесообразности, идентичными ссылочными обозначениями.
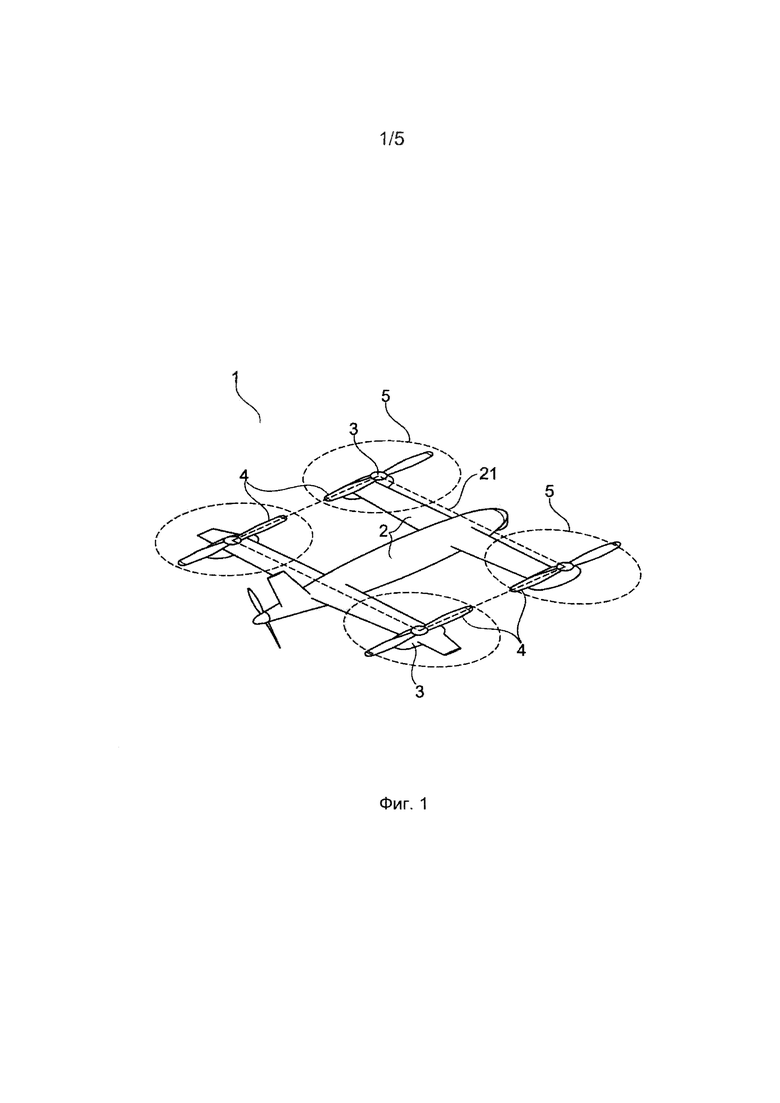
Фиг. 1 показывает первый примерный вариант осуществления летательного аппарата 1 в трехмерном виде. Летательный аппарат 1 имеет несущую конструкцию 2 и по меньшей мере четыре несущих винта 3. Каждый из несущих винтов 3 закреплен на несущей конструкции 2 и имеет по меньшей мере один воздушный винт 4. Несущие винты 3 выполнены таким образом, что плоскость 5 вращения, в которой по меньшей мере один воздушный винт 4 несущего винта 3 вращается или же воздушные винты 4 четырех несущих винтов 3 вращаются, наклонена относительно образованной несущей конструкцией 2 плоскости 21. Отклонение плоскости 5 вращения воздушных винтов 4 подробно представлено на фиг. 2.
Представленный на фиг. 1 примерный летательный аппарат 1 имеет тяговый привод для быстрого прямолинейного горизонтального полета. Тем не менее, описанное здесь изобретение не зависит от разновидности привода летательного аппарата 1 и может применяться также для летательных аппаратов 1, в которых для быстрого прямолинейного горизонтального полета применяются также несущие винты 3.
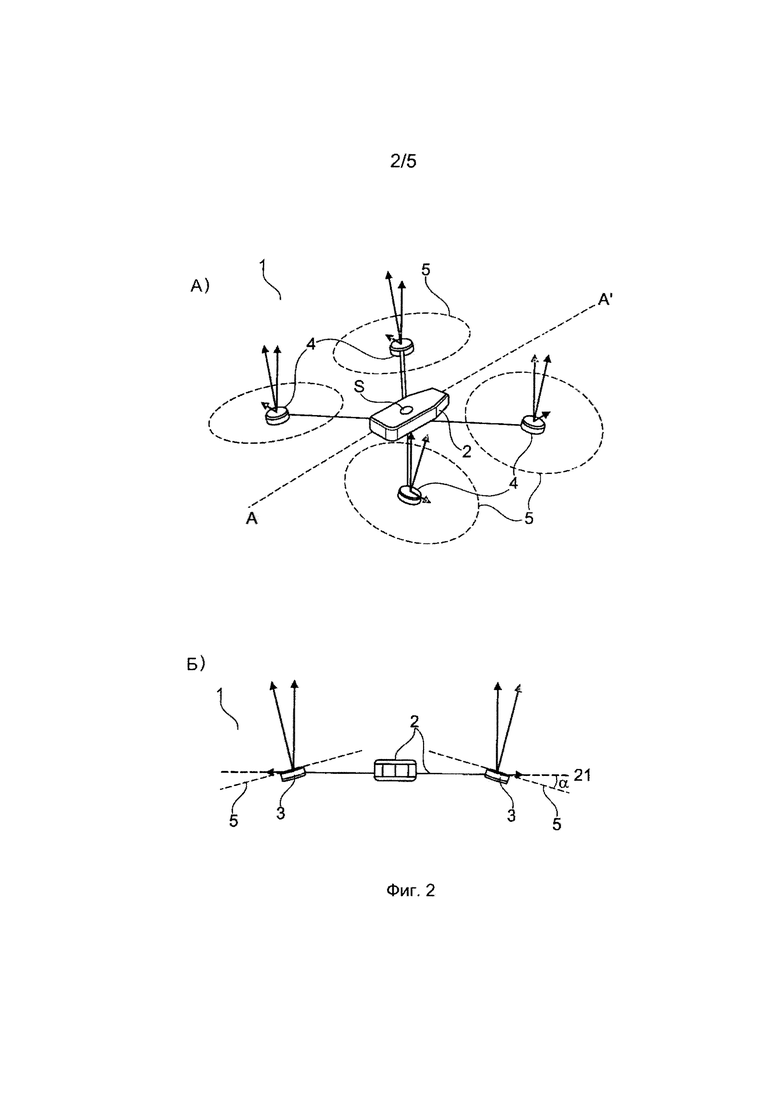
Фиг. 2 показывает различные виды упрощенного представления примерного варианта осуществления летательного аппарата 1. Несущая конструкция 2 летательного аппарата 1 в представленном на фиг. 2А и 2Б примерном варианте осуществления уменьшена до минимума для обеспечения возможности лучшего представления отклонения плоскости 5 вращения воздушных винтов (не представлены) относительно образованной несущей конструкцией 2 плоскости 21.
Фиг. 2А показывает трехмерный вид летательного аппарата 1. Плоскость вращения 5 воздушных винтов несущих винтов 3 наклонена перпендикулярно продольной оси А-А' летательного аппарата 1 наружу. За счет отклонения или же наклона оси вращения тяговая компонента несущего винта 3 более не действует на 100% в верхнем направлении, но содержит направленную наружу тяговую компоненту. Представление действующих сил представлено на последующих фиг. 3-5 как в общем, так и для различных ситуаций полета.
Фиг. 2Б является видом летательного аппарата 1 на фиг. 2А при рассмотрении в направлении продольной оси А-А' из положения А. При этом отчетливо показано, что плоскость вращения 5 воздушных винтов (не представлены) несущих винтов 3 наклонена наружу относительно образованной несущей конструкцией 2 летательного аппарата 1 плоскости 21. Направление поворота при рассмотрении из центра тяжести летательного аппарата 1 направлено наружу перпендикулярно продольной оси А-А'. Как показано посредством векторов сил, за счет отклонения тяговая компонента несущих винтов 3 действует не только в верхнем направлении, но и перпендикулярно продольной оси А-А', то есть наружу. Посредством наклона плоскостей 5 вращения можно использовать синусовый эффект. Наличие преимущественного направления при этом является существенным. Воздушные винты не должны действовать просто в радиальном наружном направлении, поскольку в таком случае эффект устраняется. Воздушные винты и, тем самым, плоскость 5 вращения следует наклонять таким образом, что они способны создавать крутящий момент относительно вертикальной оси. Результирующая тяговая компонента, то есть сумма вертикальной и горизонтальной тяговых компонент, действует перпендикулярно плоскости 5 вращения, то есть наклонно под малым углом наружу от перпендикуляра.
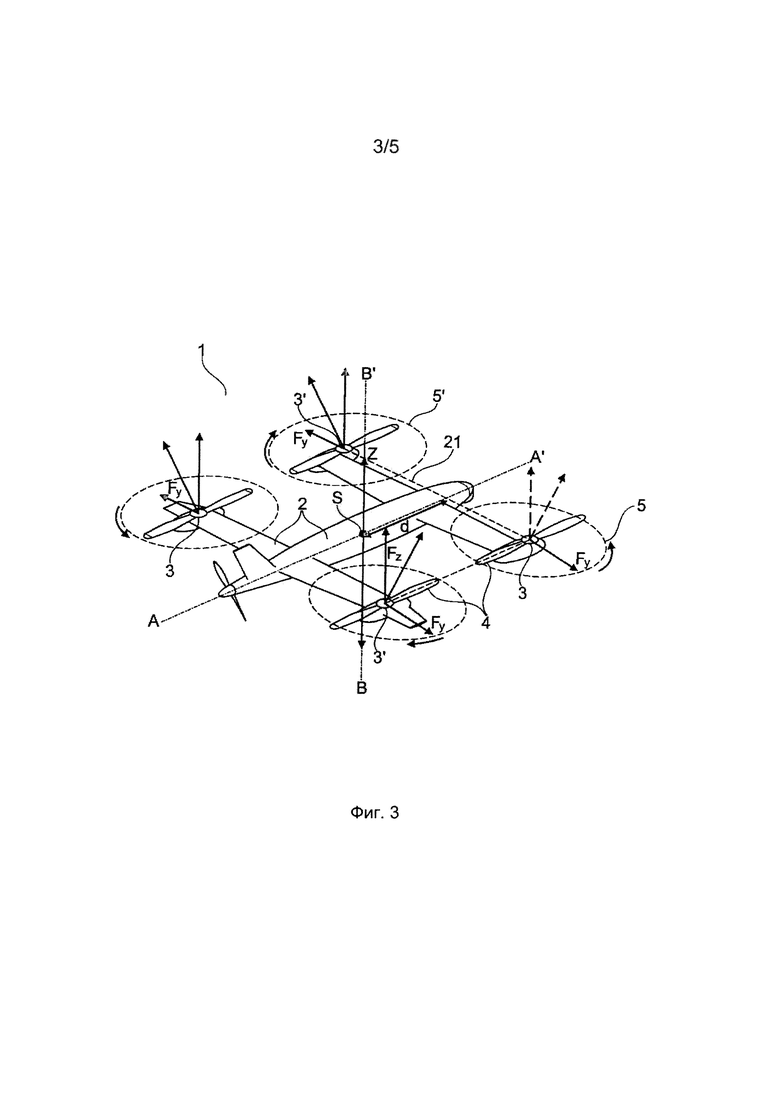
Фиг. 3 показывает представление сил для примерного варианта осуществления летательного аппарата 1. В представленном на фиг. 3 летательном аппарате 1 представлено направление вращения воздушных винтов 4 несущих винтов 3, 3'. При этом направление вращения воздушных винтов 4 несущих винтов 3, то есть двух диагонально противолежащих несущих винтов 3, направлено по часовой стрелке. Направление вращения воздушных винтов 4 двух других диагонально противолежащих несущих винтов 3' направлено против часовой стрелки. Посредством различных направлений вращения воздушных винтов 4 несущих винтов 3, 3' крутящие моменты несущих винтов 3, 3' могут быть скомпенсированы. Каждый несущий винт 3, 3', наряду с действующей в Z-направлении, то есть вертикально, тяговой компонентой Fz, имеет посредством наклона или же отклонения плоскости 5 вращения воздушных винтов 4 действующую в Y-направлении, то есть горизонтально, тяговую компоненту Fy.
Результирующая тяговая компонента получается сложением обеих тяговых компонент Fz и Fy. При целенаправленном регулировании числа оборотов несущих винтов 3, 3' и, тем самым, сопряженного изменения тягового усилия постоянно образуется пара сил, которая в каждом случае создает крутящий момент относительно вертикальной оси В-В'.
В качестве примера, тяговая компонента в Z-направлении на правом переднем несущем винте 3 представлена в виде пунктирной линии. Тяговая компонента в Y-направлении представлена с помощью сплошной линии, а результирующая тяговая компонента - с помощью штрихпунктирной линии. В полете в режиме висения сумма тяговых компонент Fz отдельных несущих винтов 3 дает в итоге полную тяговую компоненту в Z-направлении и соответствует при этом весу летательного аппарата 1.
Тяговая компонента несущих винтов 3 тем больше, чем далее несущие винты 3 отстоят от центра S тяжести летательного аппарата 1 в направлении продольной оси А-А' летательного аппарата 1. Точнее выражаясь, действие созданного посредством горизонтальной тяговой компоненты Fy крутящего момента тем больше, чем больше расстояние d от центра S тяжести в продольном направлении А-А' летательного аппарата 1.
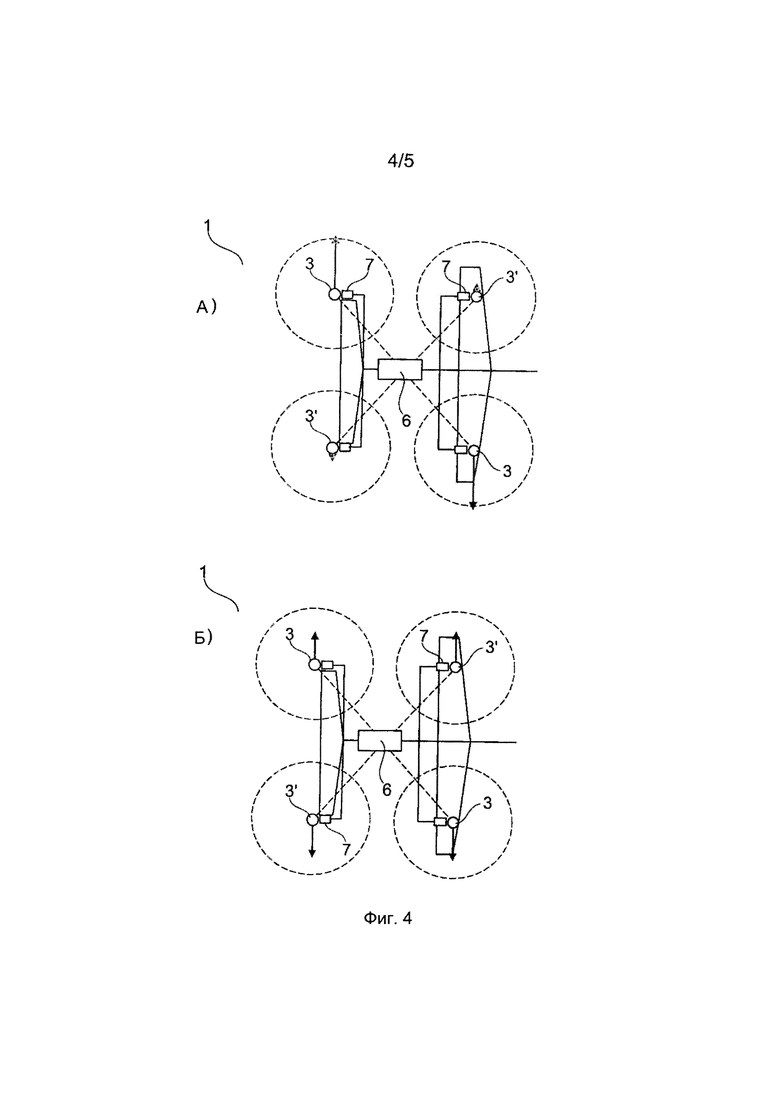
Фиг. 4 показывает распределение сил при различных маневрах в полете упрощенного представления примерного варианта осуществления летательного аппарата 1. В представленном на фиг. 4 примерном варианте осуществления несущая конструкция как таковая летательного аппарата 1 для лучшего представления представлена только условно.
При этом фиг. 4А показывает вращение летательного аппарата 1 в полете в режиме висения. Приложенные к отдельным несущим винтам 3, 3' крутящие моменты представлены посредством стрелок. Отдельные системы 7 управления двигателями несущих винтов 3, 3' управляются посредством системы 6 управления и стабилизации летательного аппарата, например, вычислителя (FCC) системы управления полетом таким образом, что повышается число оборотов двух противоположных несущих винтов 3. Для дальнейшего удержания летательного аппарата 1 в полете в режиме висения на той же самой высоте, число оборотов двух других несущих винтов 3' соответствующим образом уменьшается. Таким образом, сумма вертикальных тяговых компонент не изменяется. Увеличение вертикальных тяговых компонент на несущих винтах 3 создает крутящий момент вокруг вертикальной оси летательного аппарата 1.
Фиг. 4Б показывает полет в режиме висения летательного аппарата 1. Приложенные к отдельным несущим винтам 3, 3' крутящие моменты представлены посредством стрелок. Крутящие моменты всех несущих винтов 3, 3' являются одинаковыми по величине. Для полета в режиме висения сумма вертикальных тяговых компонент остается неизменной. При беспрепятственном полете в режиме висения разность сил устраняется. Результирующий крутящий момент и результирующая сила в плоскости X-Y равны нулю. При целенаправленном регулировании числа оборотов, или же при изменении тягового усилия образуется пара сил, которая в каждом случае создает крутящий момент относительно вертикальной оси.
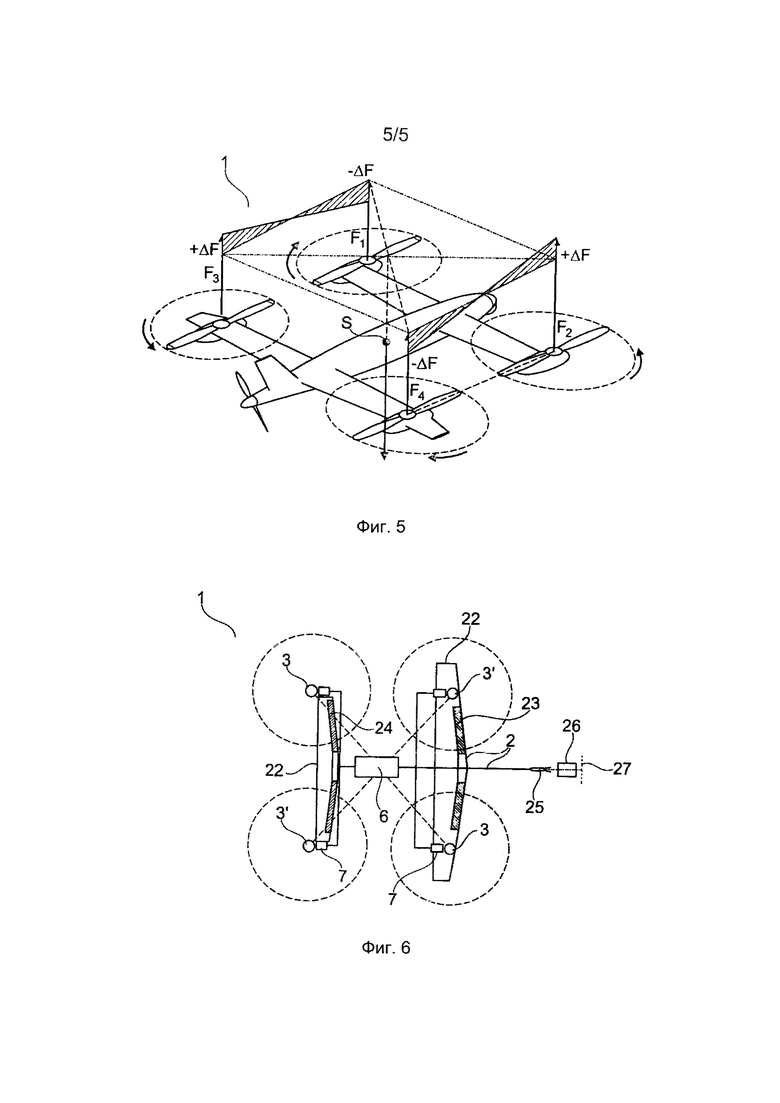
Фиг. 5 показывает представление результирующих сил для примерного варианта осуществления летательного аппарата 1.
При беспрепятственном полете в режиме висения разность сил устраняется. Тем самым результирующий крутящий момент и результирующая сила в плоскости X-Y равны нулю. При целенаправленном регулировании числа оборотов и, тем самым, при изменении тягового усилия образуется пара сил, которая в каждом случае создает крутящий момент относительно вертикальной оси. Напротив, сумма всех сил в плоскости X-Y остается равной нулю.
Фиг. 6 показывает представление концепции управления для примерного варианта осуществления летательного аппарата.
Представленный на фиг. 6 летательный аппарат 1 имеет несущую конструкцию 2 с двумя несущими поверхностями 22. Несущие поверхности 22 оснащены рулем высоты 23 или же элероном 24. Несущие поверхности 22 создают подъемную силу при быстром прямолинейном горизонтальном полете и таким образом улучшают аэродинамику и, вместе с тем, увеличивают дальность действия летательного аппарата. Для поперечного управления летательный аппарат 1 имеет, кроме того, руль направления 25, или же вертикальное оперение. Управление рулем 23 высоты, элеронами 24 и рулем направления 25 производится посредством системы 6 управления и стабилизации летательного аппарата. Система 6 управления и стабилизации летательного аппарата соединена с системой 7 управления двигателями для электродвигателей несущих винтов 3, 3' для управления числом оборотов несущих винтов 3, 3'. Для быстрого крейсерского полета летательный аппарат 1 имеет толкающий воздушный винт 27, который приводится в действие посредством привода 26. Управление числом оборотов толкающего воздушного винта 27 и связанное с ним регулирование мощности привода 26 производится, например, посредством системы 6 управления и стабилизации летательного аппарата. Привод 26 представлен, например, двигателем внутреннего сгорания, который непосредственно приводит в действие толкающий воздушный винт 27, а также производит электрический ток для привода электродвигателей несущих винтов 3. Альтернативно, в не представленном примерном варианте осуществления толкающий воздушный винт 27 может приводиться в действие также и опосредованно посредством электродвигателя, который снабжается электрическим током, например, от привода 26 или от батареи. В другом не представленном примерном варианте осуществления летательный аппарат 1 для быстрого крейсерского полета может быть снабжен также тянущим воздушным винтом.
Хотя изобретение было показано и описано, прежде всего, со ссылками на заданные варианты осуществления, специалистам в области техники должно быть понятно, что многочисленные поправки в отношении варианта осуществления и его деталей могут быть внесены без отклонения от существа и области изобретения, как они задаются посредством дополнительных пунктов формулы изобретения. Таким образом, область изобретения задается посредством прилагаемых пунктов формулы изобретения, и поэтому имеется в виду, что она охватывает все изменения, которые подпадают в силу словесного значения или в рамках диапазона эквивалентности под пункты формулы изобретения.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
1 Летательный аппарат
2 Несущая конструкция
21 Плоскость
22 Несущая поверхность
23 Руль высоты
24 Элерон
25 Руль направления
26 Привод
27 Толкающий воздушный винт
3, 3' Несущий винт
4 Воздушный винт
5 Плоскость вращения
6 Система управления и стабилизации летательного аппарата
7 Система управления двигателем
S Центр тяжести
А-А' Продольная ось
В-В' Вертикальная ось
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЫПОЛНЕННЫЙ С ВОЗМОЖНОСТЬЮ ВЕРТИКАЛЬНОГО ВЗЛЕТА ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2014 |
|
RU2670356C2 |
| СКОРОСТНОЙ ГИБРИДНЫЙ ВЕРТОЛЕТ С БОЛЬШИМ РАДИУСОМ ДЕЙСТВИЯ И ОПТИМИЗИРОВАННЫМ ПОДЪЕМНЫМ НЕСУЩИМ ВИНТОМ | 2008 |
|
RU2445236C2 |
| СКОРОСТНОЙ ГИБРИДНЫЙ ВЕРТОЛЕТ С БОЛЬШИМ РАДИУСОМ ДЕЙСТВИЯ | 2008 |
|
RU2473454C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ С ГИБРИДНОЙ СИЛОВОЙ УСТАНОВКОЙ | 2017 |
|
RU2724940C2 |
| КОМБИНИРОВАННЫЙ ВЕРТОЛЕТ | 1994 |
|
RU2089456C1 |
| АВТОЛЕТ (ВАРИАНТЫ) | 2011 |
|
RU2484980C2 |
| САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ С НЕСУЩИМ ВИНТОМ СО СВОРАЧИВАЮЩИМИСЯ УБИРАЕМЫМИ ЛОПАСТЯМИ | 2019 |
|
RU2727787C1 |
| СПОСОБ УПРАВЛЕНИЯ, СТАБИЛИЗАЦИИ И СОЗДАНИЯ ДОПОЛНИТЕЛЬНОЙ ПОДЪЕМНОЙ СИЛЫ ДИРИЖАБЛЯ | 2013 |
|
RU2532448C1 |
| Способ подготовки дистанционных боевых действий | 2023 |
|
RU2812501C1 |
| ТЯЖЕЛЫЙ СКОРОСТНОЙ ВИНТОКРЫЛ | 2016 |
|
RU2608122C1 |
Изобретение относится к области авиации, в частности к конструкциям многовинтовых летательных аппаратов. Летательный аппарат (1) имеет несущую конструкцию (2) и по меньшей мере четыре несущих винта (3), каждый из которых закреплен на несущей конструкции (2) и имеет по меньшей мере один воздушный винт (4). Несущие винты (3) выполнены таким образом, что плоскость (5) вращения, в которой вращается по меньшей мере один воздушный винт (4) несущего винта (3), расположена относительно образованной несущей конструкцией (2) плоскости (21) с наклоном, обеспечивающим создание горизонтальной тяговой компоненты, используемой для управления летательным аппаратом относительно его вертикальной оси. При этом плоскость вращения воздушного винта наклонена в плоскости, перпендикулярной продольной оси летательного аппарата. Изменение вращающих импульсов, обусловленное изменением числа оборотов несущих винтов, и указанная горизонтальная тяговая компонента действуют в одном направлении. Обеспечивается улучшение управляемости летательного аппарата. 14 з.п. ф-лы, 6 ил.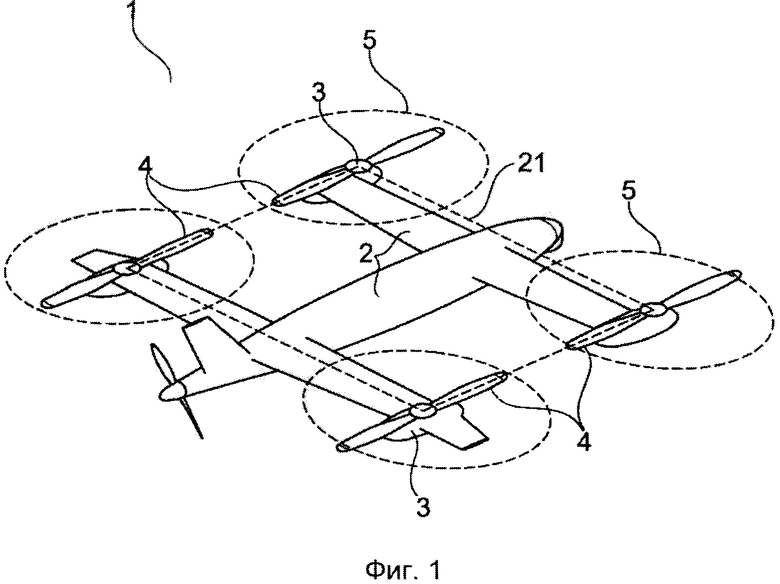
1. Летательный аппарат (1), имеющий несущую конструкцию (2) и по меньшей мере четыре несущих винта (3), каждый из которых закреплен на несущей конструкции (2) и имеет по меньшей мере один воздушный винт (4), причем несущие винты (3) выполнены таким образом, что плоскость (5) вращения, в которой вращается по меньшей мере один воздушный винт (4) несущего винта (3), расположена относительно образованной несущей конструкцией (2) плоскости (21) с наклоном, обеспечивающим создание горизонтальной тяговой компоненты, используемой для управления летательным аппаратом относительно его вертикальной оси, отличающийся тем, что плоскость вращения воздушного винта наклонена перпендикулярно продольной оси летательного аппарата, проходящей в основном направлении его полета, причем изменение вращающих импульсов, обусловленное изменением числа оборотов несущих винтов, и указанная горизонтальная тяговая компонента действуют в одном направлении.
2. Летательный аппарат по п. 1, причем плоскость (5) вращения воздушного винта (4) наклонена относительно образованной несущей конструкцией (2) плоскости (21) вовнутрь или наружу.
3. Летательный аппарат по п. 2, причем плоскость вращения (5) воздушного винта (4) наклонена перпендикулярно продольной оси (А-А') в основном направлении полета летательного аппарата (1) вовнутрь или наружу.
4. Летательный аппарат по одному из пп. 1, 2 или 3, причем сумма создаваемых несущими винтами (3) подъемных сил проходит по существу через центр (S) тяжести летательного аппарата (1).
5. Летательный аппарат по одному из пп. 1, 2 или 3, причем посредством изменения числа оборотов по меньшей мере двух диагонально противолежащих по отношению к центру (S) тяжести летательного аппарата (1) несущих винтов (3) является создаваемым крутящий момент относительно вертикальной оси (В-В') летательного аппарата (1).
6. Летательный аппарат по п. 5, причем сумма созданных посредством несущих винтов (3) крутящих моментов в полете в режиме висения близка к нулю.
7. Летательный аппарат по п. 5, причем летательный аппарат (1) при созданной посредством несущих винтов (3) не равной нулю сумме крутящих моментов является вращаемым относительно нормальной оси.
8. Летательный аппарат по одному из пп. 1, 2, 3, 6 или 7, причем в каждом случае два диагонально противолежащих несущих винта (3) имеют противоположное по отношению по меньшей мере к двум другим диагонально противолежащим несущим винтам (3') направление вращения.
9. Летательный аппарат по одному из пп. 1, 2, 3, 6 или 7, причем посредством отклонения плоскости (5) вращения несущих винтов (3) реализована тяговая компонента перпендикулярно подъемной компоненте.
10. Летательный аппарат по п. 9, причем увеличенный посредством тяговой компоненты крутящий момент несущего винта (3) тем больше, чем далее несущий винт (3) удален от центра тяжести летательного аппарата (1) в направлении продольной оси (А-А') летательного аппарата (1).
11. Летательный аппарат по одному из пп. 1, 2, 3, 6 или 7, причем несущие винты (3) выполнены таким образом, что плоскость (5) вращения является стационарной по отношению к приводимой в действие посредством двигателя (7) винтовой оси (31) несущего винта (3).
12. Летательный аппарат по одному из пп. 1, 2, 3, 6 или 7, причем лопасти (41) воздушного винта несущего винта (3) жестко соединены с винтовой осью (31).
13. Летательный аппарат по одному из пп. 1, 2, 3, 6 или 7, причем каждый из несущих винтов (3) приводится в действие электродвигателем (7).
14. Летательный аппарат по одному из пп. 1, 2, 3, 6 или 7, причем летательный аппарат является самолетом вертикального взлета и посадки.
15. Летательный аппарат по одному из пп. 1, 2, 3, 6 или 7, причем летательный аппарат является пилотируемым или беспилотным летательным аппаратом.
| WO 2009095696 A2, 06.08.2009 | |||
| КВАДРОЛЕТ | 2013 |
|
RU2547950C1 |
| DE 102006019300 A1, 31.10.2007 | |||
| DE 19700182 A1, 09.07.1998. | |||

