Область техники, к которой относится изобретение
Изобретение относится к области управления воздушным движением и может быть использовано во вторичной радиолокации для уменьшения вероятности завязки ложных трасс и автоматической адаптации радиолокатора к месту установки, а также адаптации во время эксплуатации при появлении искусственно возведенных отражателей (здания, технические сооружения, ангары и т.п.).
Уровень техники
Известны аналоги предлагаемого способа [1 патент №2225624, 2 патент №2348053], где задача уменьшения вероятности завязки ложных трасс решается методом обработки радиолокационной информации и может быть использовано в когерентно-импульсных радиолокационных станциях (РЛС) сопровождения для распознавания воздушных ложных целей (ЛЦ) любых типов на фоне реальных. Решение задачи распознавания ЛЦ предлагается проводить двумя разнесенными на местности РЛС, основной и дополнительной в два этапа.
Для этих способов характерна большая избыточность оборудования, которая ведет к значительному увеличению стоимости.
Наиболее близким по технической сущности к предлагаемому способу является известный способ обработки радиолокационной информации с малой вероятностью завязки ложных трасс (патент №.2586623), включающий совместную пространственно-временную и трассовую обработку, использующую полученную от пространственно-временной обработки информацию при завязке и сопровождении трасс, пространственно-временная обработка дополнена операцией формирования признака ложной тревоги (ЛТ), которая выполняет отбор максимального амплитудного значения сигнала движущейся цели, оптимальную обработку сигналов местных предметов, накопление данных, умножение на коэффициент, зависящий от стабильности приемопередающего тракта, сравнение задержанного максимального амплитудного значения сигнала движущейся цели с уровнем остатка от сигнала местных предметов и определение признака ЛТ, при этом признак ЛТ принимает ненулевое значение в случае превышения уровня остатка от сигнала местных предметов над задержанным максимальным амплитудным значением сигнала движущейся цели и нулевое - в противном случае. Далее сформированный признак ЛТ используют в трассовой обработке, выполняющей накопление значений пространственных координат, радиальной скорости и признака ЛТ по нескольким обзорам, причем цели с ненулевым значением этого признака при завязке трассы исключаются из рассмотрения, а при сопровождении - понижается приоритет выбора цели (при наличии нескольких целей).
Достоинством данного способа является снижение вероятности ложной инициализации треков, возникающих от отражающих поверхностей.
В прототипе «Способ уменьшения вероятности завязки ложных трасс» (патент №.2586623) приведен пример устройства, реализующего этот способ уменьшения вероятности завязки ложных трасс, в основном состоящего из системы пространственно-временной обработки, блока отбора максимального амплитудного значения, блока накопления данных по нескольким обзорам, блок завязки трасс и блока формирования признака ложной тревоги (ЛТ). Формирование признака ЛТ, позволяет учесть снижение достоверности измерения пространственных координат и радиальной скорости ДЦ, имеющей ненулевое значение этого признака, позволяет осуществить отсева ЛТ на уровне завязки трассы, что позволяет сократить время принятия решения по отсеву ложной трассы.
Амплитудный способ формирования ложной тревоги, предлагаемый в рассмотренном методе, наиболее эффективен для первичных радиолокаторов, во вторичной радиолокации он полезен, но не решает всех проблем, связанных с переотражениями. Во вторичной радиолокации очень часто встречаются ситуации, в которых амплитуда отраженного сигнала мало отличается от амплитуды прямого сигнала и разделить их методом сравнения амплитуд затруднительно. Известно, что наиболее опасной для вторичной радиолокации является ситуация, когда запросный сигнал отражается от какой-нибудь отражающей поверхности, отраженный запрос принимает ответчик воздушного судна и излучает ответ, который в свою очередь, отражаясь от той же отражающей поверхности, попадает в приемник радиолокатора. Эти ситуации возникают достаточно часто, сложность их разрешения заключается в том, что ложный формуляр ответа возникает на азимуте отражающей поверхности, а не на азимуте отвечающего ВС, при этом вероятность того, что амплитуды этих сигналов будут незначительно отличаться друг от друга, достаточно велика. Если при этом информационная составляющая отраженных ответов оказывается искаженной, тогда амплитудный метод не эффективен.
Ситуация, в которой запрос и ответ на него отражаются от одной и той же отражающей поверхности, послужила главной причиной создания предлагаемого способа и устройства. Этот способ и устройство используются в дополнение к известным средствам защиты вторичного радиолокатора (ВРЛ) от приема ложных сигналов, одним из примеров которых может служить динамический порог обнаружения, который полезен в том случае, когда мы имеем дело только с отраженным ответом.
Раскрытие сущности изобретения
Изобретение относится к области управления воздушным движением и может быть использовано во вторичных радиолокаторах для уменьшения вероятности завязки ложных трасс и осуществления автоматической адаптации вторичного радиолокатора режимов A/C/S, УВД к месту размещения, во время установки, после установки и в процессе эксплуатации, при появлении искусственно возведенных отражателей (зданий, технических сооружений, ангаров и т.п.).
Задачей предлагаемого способа и устройства является повышение безопасности полетов, благодаря увеличению защищенности к переотраженным сигналам.
Указанная задача решается за счет того, что при инициализации треков от воздушных судов, используется устройство, реализующее способ, включающий в себя обнаружение зон переотражений и запрета инициализации трасс, начинающихся внутри зон переотражений, за исключением указанных ниже случаев.
Согласно изобретению, способ обработки радиолокационной информации с малой вероятностью завязки ложных трасс и автоматической адаптацией вторичного радиолокатора к месту установки включает в себя следующие этапы:
a) установка времени блокировки потока данных непосредственно в решающее устройство до завершения формирования карты зон отражений;
b) пространственно-временная обработка;
c) операция запрета инициализации ложных трасс;
d) операция формирования зон переотражений;
В предлагаемом способе:
на этапе b) выполняют операцию подготовки данных, включающую в себя операцию исключения из рассмотрения трасс, которые в момент включения находились не на границе видимости,
выполняют операцию пространственной верификации, включающую в себя операцию определения местоположения первых формуляров трасс относительно границ зоны видимости, относительно углов закрытия, относительно воронки, относительно торцов взлетных полос, если они имеются;
после этапа b), если местоположение первых формуляров совпадает с границами указанными в b), осуществляют завязку трасс, если местоположение первых формуляров трасс не совпадают с границами, указанными в b), выполняют операцию информационной верификации, включающую в себя операцию сравнения информационной составляющей формуляров инициализируемых трасс с информационной составляющей формуляров ранее инициализированных трасс, но в настоящий момент существующих, на наличие в них дублированных данных, при наличии которых, в частности при наличии дублированного номера борта, операцию определения размещения первых формуляров трасс относительно границ с соседними автоматизированными системами управления воздушным движением (AC-УВД), если они совпадают с границами, разрешают завязку трасс, если нет, выполняют операцию расчета зон переотражений, операцию формирования архива зон переотражений, операцию определения принадлежности инициализируемых треков к зонам переотражений и операцию преобразования координат в формат WGS-84 для отображения зон переотражений на контрольном индикаторе.
Согласно изобретению, устройство для уменьшения вероятности завязки ложных трасс и автоматической адаптации вторичного радиолокатора к месту установки включает в себя систему пространственно-временной обработки, блок завязки трасс. Устройство дополнительно содержит:
архив параметров инициализированных трасс; блок верификации информационных признаков; блок расчета зон переотражений; архив зон переотражений; блок принятия решений; блок завязки трасс; выход которого является выходом устройства; преобразователь координат в формат WGS-84, первый вход которого соединен с архивом зон переотражений и первый выход которого является выходом устройства; архив углов закрытия и архив высотных границ видимости,
причем выход архива параметров инициализированных трасс соединен со вторым входом блока верификации информационных признаков, первый выход блока верификации информационных признаков соединен с блоком расчета зон переотражений, первый выход блока расчета зон переотражений соединен с первым входом архива зон переотражений, первый выход архива зон переотражений соединен с первым входом блока принятия решений и первый выход блока принятия решений соединен с вторым входом блока завязки трасс,
при этом система пространственно-временной обработки дополнена блоком подготовки данных, первый вход которого является входом устройства и первый выход которого соединен с первым входом блока пространственно-временной обработки; второй выход блока подготовки данных выполнен с возможностью подключаться к четвертому входу блока принятия решений только после завершения формирования карты зон переотражений, а третий вход блока пространственно-временной обработки выполнен с возможностью соединяться с первым выходом архива углов закрытия; и второй вход блока пространственно-временной обработки соединен с первым выходом архива высотных границ видимости.
Предлагаемые способ и устройство обеспечивают технический результат, заключающийся в уменьшении вероятности инициализации трасс, а также в автоматической адаптации радиолокатора к месту установки и адаптации во время эксплуатации при появлении искусственно возведенных отражателей (здания, технические сооружения, ангары и т.п.).
Краткое описание чертежей
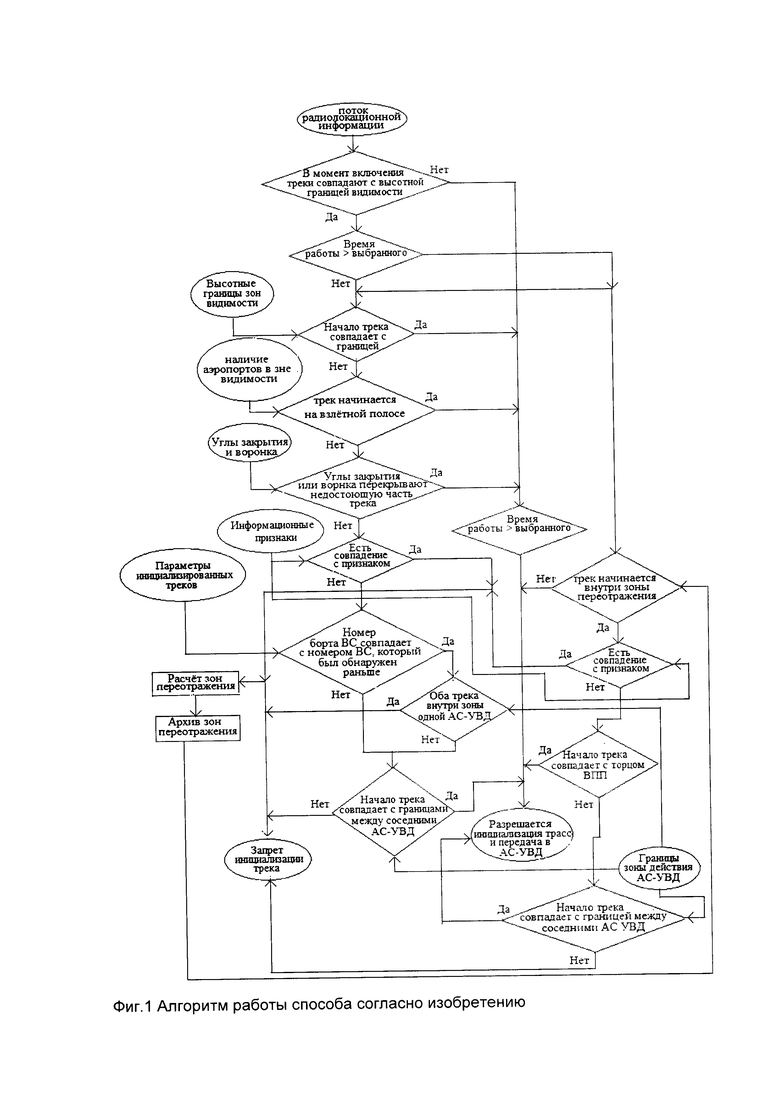
Фиг. 1 - алгоритм работы способа уменьшения вероятности завязки ложных трасс и автоматической адаптации моноимпульсного вторичного радиолокатора к месту установки;
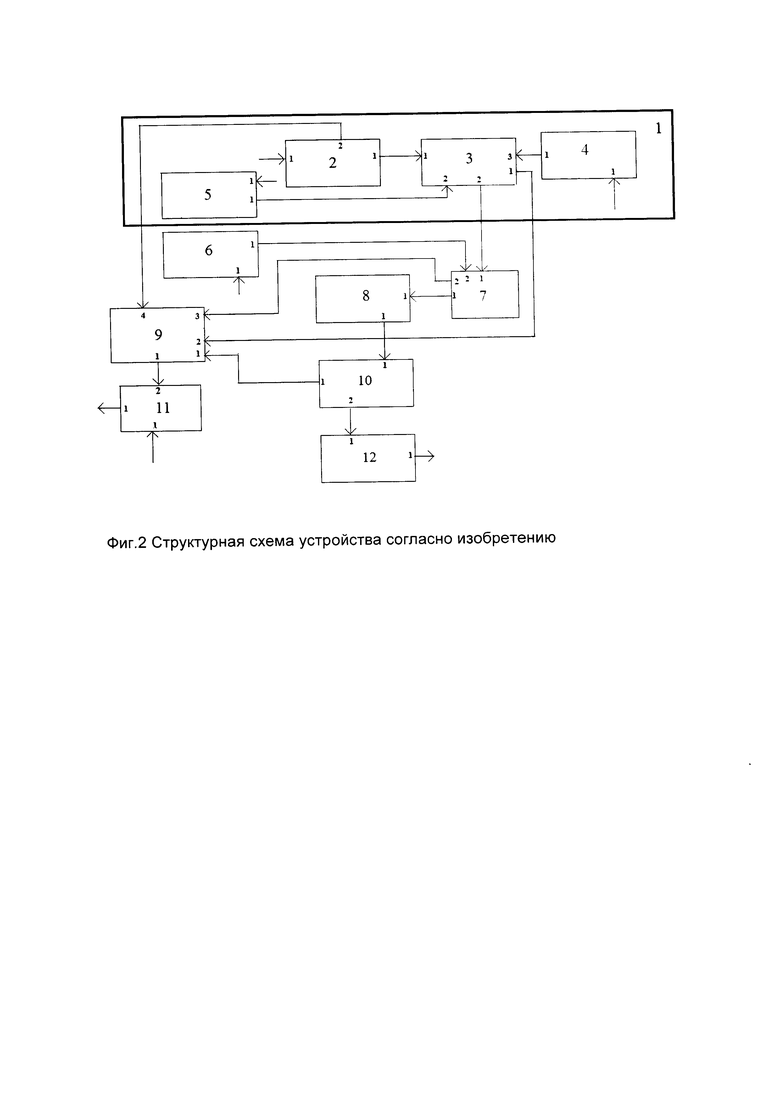
Фиг. 2 - структурная схема устройства согласно изобретению.
Осуществление изобретения
Реализация способа осуществляется следующим образом, в момент включения ВРЛ из процедуры формирования зон отражения исключаются формуляры воздушных судов далее (ВС), которые в момент включения ВРЛ находились не на высотной границе зоны видимости ВРЛ. От момента первоначального включения моноимпульсного вторичного радиолокатора (МВРЛ) до окончания установленного оператором времени, продолжительность которого, связана с завершением формирования карты зон переотражений, чем выше интенсивность воздушного движения, тем быстрее будет сформирована карта зон переотражений, наличие которой, позволит сократить время выявления ложных трасс. В процессе формирования зон переотражений из потока радиолокационной информации выявляются трассы, начало которых совпадает с высотной границей видимости ВРЛ. Трассы, первые формуляры которых начинаются от высотной границы зоны видимости используются для инициализаций треков и передачу их параметров в автоматизированную систему управления воздушным движением (AC-УВД). Трассы, начало которых не совпадает с высотными границами зон видимости, подвергаются проверке на совпадение первых формуляров этих трасс с торцами взлетных полос, если таковые присутствуют в зоне действия ВРЛ. Если начало трасс совпадает с торцами взлетных полос, их параметры также могут быть использованы для завязки треков, которые будут транслироваться в AC-УВД. Если начало трасс не совпадают с торцами взлетных полос, осуществляется проверка на совпадение недостающих частей трасс с углами закрытия или воронкой. При совпадении углов закрытия или воронки с недостающей частью трека, формуляры этих трасс используются для завязки треков и трансляции в AC-УВД. При несовпадении углов закрытия или воронки с недостающей частью трека, проверяется наличие в формулярах трека информационных признаков переотражений, в качестве которых могут быть использованы следующие:
- отсутствие дополнительной информации;
- неустойчивый прием дополнительной информации;
- искажение дополнительной информации от формуляра к формуляру. Если такие признаки присутствуют, запрещается инициализация трассы,
а геометрические параметры трека используются для расчета зон переотражений. Если такие признаки отсутствуют, осуществляется проверка, по данным архива инициализированных трасс, наличия в формулярах трека номера борта уже существующего у трека, образованного ранее, но еще существующего, если в формулярах трека нет дублированного номера борта, производится проверка на совпадение первых формуляров этих трасс, с границей зоны действия AC-УВД. Если появление первых формуляров не совпадает с границей AC-УВД, тогда геометрические параметры трека используются для расчета зон переотражений. А если первые формуляры совпадают с границей AC-УВД тогда формуляры этих трасс используются для завязки треков и трансляции их параметров в AC-УВД. Если был обнаружен дублированный номер борта в формулярах трека, осуществляется проверка на одновременное присутствие треков с одинаковым номером борта внутри одной зоны AC-УВД. Если треки находятся в зоне одной AC-УВД, геометрические данные дублированного трека используются для расчета зоны отражений, а инициализация такого трека запрещается. Если дублированный трек и трек ранее существовавший находятся в разных зонах AC-УВД, тогда осуществляется проверка на совпадение первых формуляров дублированного трека с границей соседней АС-УВД, если первые формуляры трека совпадают с границей соседней АС УВД, разрешается инициализация трассы и трансляция параметров в AC-УВД. Если первые формуляры трека не совпадают с границей AC-УВД, которую обслуживает данный ВРЛ, тогда геометрические данные этого трека используются для построения зон переотражений. По истечению выбранного для формирования зон переотражений времени, поток радиолокационной информации делится на два направления, поток данных из первого направления прекращает свое влияние на завязку трасс, его задачей становится формирование новых зон переотражений или расширение уже существующих в случаях возникновения новых отражающих поверхностей. Поток радиолокационной информации из второго направления станет обеспечивать завязку трасс. В этом направлении поток информации от процессора данных проверяется на совпадение первых формуляров трасс с уже сформированными зонами переотражений, треки, первые формуляры которых не попадают в зону переотражений, используются для завязки трасс, а их данные направляются в AC-УВД. Треки, первые формуляры, которых попадают в зоны переотражений, проверяются на наличие в них информационных признаков переотражений, если таковые имеются, запрещается инициализация трасс. Если информационные признаки отсутствуют, осуществляется проверка на совпадение первых формуляров трека с торцами взлетных полос, если первые формуляры трека совпадают с торцами взлетных полос, тогда их параметры используются для инициализации трассы и данные о ней передаются в AC-УВД. Если первые формуляры треков не совпадают с торцами взлетных полос или взлетные полосы отсутствуют в зоне переотражений, тогда первые формуляры трека проверяются на совпадение с границами зоны действия AC-УВД, если первые формуляры трека начинаются от границы зоны действия AC-УВД разрешается инициализация трассы и ее параметры транслируются в AC-УВД. Если первые формуляры трека не совпадают с границей зоны действия AC-УВД, запрещается инициализация трасс и трансляция их данных в АС-УВД.
Алгоритм работы способа уменьшения вероятности завязки ложных трасс и автоматической адаптации моноимпульсного вторичного радиолокатора к месту установки представлен на фиг. 1.
Предлагаемое устройство уменьшения вероятности завязки ложных трасс и автоматической адаптации вторичного радиолокатора к месту установки, структурная схема которого изображена на фиг. 2, состоит из следующих элементов:
- система пространственно-временной обработки (1);
- блок подготовки данных (2);
- блок пространственно-временной обработки (3);
- архив углов закрытия (4);
- архив высотных границ видимости и границ АС-УВД (5);
- архив параметров инициализированных треков (6);
- блок верификации информационных признаков (7);
- блок расчета зон переотражений (8);
- блок принятия решений (9);
- архив зон переотражений (10);
- Блок завязки трасс (11);
- преобразователь координат в формат WGS-84 (12).
Устройство работает следующим образом, на первый вход блока подготовки данных системы пространственно-временной обработки, из процессора данных, поступает поток вторичной радиолокационной информации в реальном времени. Блок подготовки данных исключает из процедуры формирования зон переотражений формуляры воздушных судов далее (ВС), которые в момент включения ВРЛ находились в дали от высотной границы зоны видимости ВРЛ. Кроме того, он блокирует попадание данных, не прошедших верификацию на соответствие признакам переотражений в блок принятия решений, до тех пор, пока не будет создана карта зон переотражений. Время блокировки выдачи данных может быть изменено оператором командами с местного терминала ВРЛ. С первого выхода блока подготовки данных радиолокационная информация непрерывно поступает на первый вход блока пространственно-временной обработки, входящего в систему пространственно-временной обработки. Со второго выхода блока подготовки данных радиолокационная информация после завершения карты зон переотражений, будет поступать на шестой вход блока принятия решений, время создания карты измеряться днями и неделями, устанавливается оно оператором с учетом интенсивности воздушного движения, в момент первоначального включения ВРЛ на объекте эксплуатации. Второй вход блока пространственно-временной обработки соединен с архивом высотных границ видимости, с помощью данных которого, производится проверка совпадения первых формуляров трека с границей зоны видимости, третий вход блока пространственно-временной обработки соединен с архивом углов закрытия, с помощью данных которого проверяется совпадение недостающих частей трека с углами закрытия. Параметры треков, начало которых совпадает с высотными границами зон видимости, считаются легитимными и передаются с первого выхода блока пространственно-временной обработки в блок принятия решений. Треки, начало которых не совпадает с высотными границами зон видимости, а недостающая их часть перекрывается углами закрытия, считаются легитимными и их формуляры передаются с первого выхода в блок принятия решений. Все остальные треки, передаются со второго выхода блока пространственно-временной обработки, на первый вход блока верификации информационных признаков, в котором оценивается наличие информационных признаков, нестабильность наличия дополнительной информации в принятых формулярах, отсутствие в формулярах дополнительной информации или неоднозначность дополнительной информации в формулярах одного трека. Если вышеперечисленные признаки обнаруживаются тогда геометрические параметры таких треков направляются с первого выхода блока верификации информационных признаков на первый вход блок расчета зон переотражений. Остальные треки с помощью информации архива параметров инициализированных треков, поступающей на второй вход, блока верификации информационных признаков, проверяются на наличие в формулярах данных, присутствующих в формулярах ранее инициализированных треков, но в настоящий момент еще существующих. Если дублированные данные обнаруживаются, блок верификации информационных признаков осуществляет проверку таких треков на их одновременное существование внутри одной зоны AC-УВД, геомебтрические параметры дублированных треков оказавшихся внутри одной зоны AC-УВД с первого входа транслируются в блок расчета зон переотражений. Недублированные треки, не имеющие информационных признаков переотражений и дублированные находящиеся в зонах разных AC-УВД, проверяются на совпадение их первых формуляров с границей между зонами действия соседних AC-УВД. Если первые формуляры не совпадают с границей между зонами действия соседних AC-УВД, тогда геометрические параметры этих треков с первого выхода блока верификации информационных признаков транслируются на первый вход блока расчета зон переотражений, а все остальные треки, с второго выхода блока верификации информационных признаков транслируются в блок принятия решений для завязки трасс и передачи данных о них в AC-УВД. Зоны переотражений, с первого выхода блок расчета зон переотражений, поступают на первый вход архива зон переотражений, с первого выхода которого, сразу после завершения заранее установленного времени для создания карты зон переотражений, поступают на первый вход блока принятия решений. Второй выход архива зон переотражений соединяется с первым входом преобразователя координат в формат WGS-84 (12). До тех пор, пока не будет создана карта зон переотражений, блок принятия решений производит управление блоком завязки трасс по данным, поступающим из второго и третьего входов, но ка только будет создана карта зон переотражений, второй и третий входы блокируются и радиолокационная информация поступает в него через четвертый вход, одновременно открывается его первый вход в результате чего становится доступным архив зон переотражений. При поступлении в блок принятия решений от блока подготовки данных формуляров вновь инициализируемого трека, блок принятия решений проверяет самые первые формуляры, не попадают ли они в зону переотражений, используя карту зон переотражений, полученную с первого входа. Если первые формуляры не попадают в зоны переотражений, блок принятия решений выдает команду через первый выход в блок завязки трасс на разрешение инициализации этого трека. Если первые формуляры вновь инициализируемого трека, попадают в зону переотражений, а в зоне переотражений первые формуляры начинаются от торца взлетной полосы, блок принятия решений дает команду на инициализацию этой трассы и передачи данных о ней в AC-УВД. При несовпадении первых формуляров трека с торцами взлетных полос, или при отсутствии в зоне переотражений аэропорта, с которого происходят взлеты или посадки ВС, блок принятия решений проверяет наличие совпадения первых формуляров трека с границей зоны действия AC-УВД. Если первые формуляры трека совпадают с границей зоны действия AC-УВД, блок принятия решений выдает команду в блок завязки трас на разрешение инициализации этой трассы и выдачи данных о ней в AC-УВД. Если первые формуляры трека не совпадают с границей зоны действия AC-УВД, блок принятия решений запрещает инициализацию трассы и трансляцию данных о ней в AC-УВД. Со второго выхода архива зон переотражений информация о зонах переотражений поступает на вход преобразователя координат в формат WGS-84, выход которого соединяется с контрольным индикатором, что дает возможность наблюдать зоны переотражений на экране контрольного индикатора. Первые входы архива высотных границ видимости, архива параметров инициализированных треков и архива углов закрытия соединяются с местным терминалом, с помощью которого в них можно вводить дополнительную информацию, которая может возникнуть в процессе эксплуатации радиолокатора.
Предлагаемое устройство может быть реализовано как на программном уровне, так и на программно-аппаратном уровне с помощью программируемой логики.
Список литературы
1. Справочник по основам радиолокационной техники, В.В. Дружинин, Военное издательство, 1967 г.
2. Герасимов Сергей Николаевич, Лукьянов Сергей Федорович, Пачина Надежда Владимировна, патент №2586623 на изобретение «Способ обработки радиолокационной информации с малой вероятностью завязки ложных трасс».
3. Бабусенко Сергей Иванович, Журавлев Александр Викторович, Кирюшкин Владислав Викторович, Красов Евгений Михайлович, Маркин Виктор Григорьевич, Шуваев Владимир Андреевич, патент №2734233 на изобретение «Устройство компенсации прямого и отраженного от стационарного объекта радиолокационных сигналов радиопередатчика в приемнике бистатической радиолокационной системы».
4. Митрофанов Дмитрий Геннадьевич, Бортовик Виталий Валерьевич, Сафонов Алексей Викторович, Силаев Николай Владимирович, Ермоленко Виктор Павлович, Прохоркин Александр Геннадьевич, Майоров Дмитрий Александрович, патент №2348053 на изобретение «Способ распознавания ложных воздушных целей».
5. Митрофанов Д.Г., Бортовик В.В., Николаев А.В., Сафонов А.В., Зотов М.Ю., Митрофанов А.Д., Бочкарев А.В. патент №2225624 на изобретение «Способ распознавания ложной воздушной цели при двухпозиционном зондировании».
6. Филипп Бийо (FR), Дени Крево (FR), Клод де Вольдер (FR), Лионель Ларжийер (FR) патент №2138062 на изобретение «Способ и устройство для фильтрации ответов радиолокационных приемоответчиков».
| название | год | авторы | номер документа |
|---|---|---|---|
| Моноимпульсная вторичная радиолокационная система с режимом S | 2013 |
|
RU2606386C2 |
| МНОГОДИАПАЗОННЫЙ РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2007 |
|
RU2346291C2 |
| Антенная система радиолокационного комплекса | 2022 |
|
RU2794970C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ КОРАБЕЛЬНЫХ ПАССИВНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМ | 1989 |
|
SU1841103A1 |
| СПОСОБ ОБРАБОТКИ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ С МАЛОЙ ВЕРОЯТНОСТЬЮ ЗАВЯЗКИ ЛОЖНЫХ ТРАСС | 2014 |
|
RU2586623C2 |
| Способ предупреждения попадания летательного аппарата в вихревой след самолета-генератора вихрей | 2020 |
|
RU2758526C1 |
| Система управления полётами, заходом на посадку и посадкой вертолетов для оборудования стартовых командных пунктов надводных кораблей и диспетчерских пунктов, размещаемых на судах и морских платформах | 2017 |
|
RU2667654C1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ ПИЛОТАЖНЫЙ КОМПЛЕКС | 2006 |
|
RU2310909C1 |
| Система захода и посадки на взлётно-посадочную полосу воздушного судна с бортовой РЛС | 2019 |
|
RU2728208C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ КОРАБЕЛЬНЫХ ПАССИВНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМ | 1989 |
|
SU1841105A1 |
Изобретение относится к области управления воздушным движением и может быть использовано во вторичной радиолокации для уменьшения вероятности инициализации ложных трасс. Техническим результатом является повышение безопасности полетов, благодаря увеличению защищенности к переотраженным сигналам. Обнаруживают зоны переотражений, используя непрерывно поступающую радиолокационную информацию, которая анализируется на достоверность с учетом длительности треков, их начала и их завершения относительно границ видимости для высоты полета обнаруженного воздушного судна (ВС), с учетом наличия аэропортов, где могут начинаться и заканчиваться траектории ВС, наличия внутри зоны видимости границы с соседними автоматизированными системами управления воздушным движением (AC-УВД), наличия углов закрытия, наличия дублированной информации в формулярах, а также ухудшение точности определения угловых координат ВС. Сформированные зоны переотражений при оценке возможности завязки новых трасс способствуют ускорению процесса обнаружения нелегитимных трасс. Треки, начало которых не совпадает с зонами переотражений, считаются легитимными. При возникновении нового трека внутри зоны переотражений осуществляется проверка на совпадение начала трека с торцом взлетной полосы, если она существует внутри зоны переотражений, а при несовпадении начала трека с торцом взлетной полосы осуществляется проверка на совпадение начала трека с границей зоны действия AC-УВД, если она проходит через зону переотражений или совпадает с границей зоны переотражений, при совпадении начала трека с торцом полосы или границей зоны действия AC-УВД трек считается легитимным. В процессе работы с появлением новых отражающих поверхностей создаются новые или расширяются имеющиеся зоны переотражений. Границы новых зон переотражений используются при выявлении нелегитимных трасс, благодаря чему новые ложные треки не появляются на контрольном индикаторе и не транслируются в АС-УВД. 2 н.п. ф-лы, 2 ил.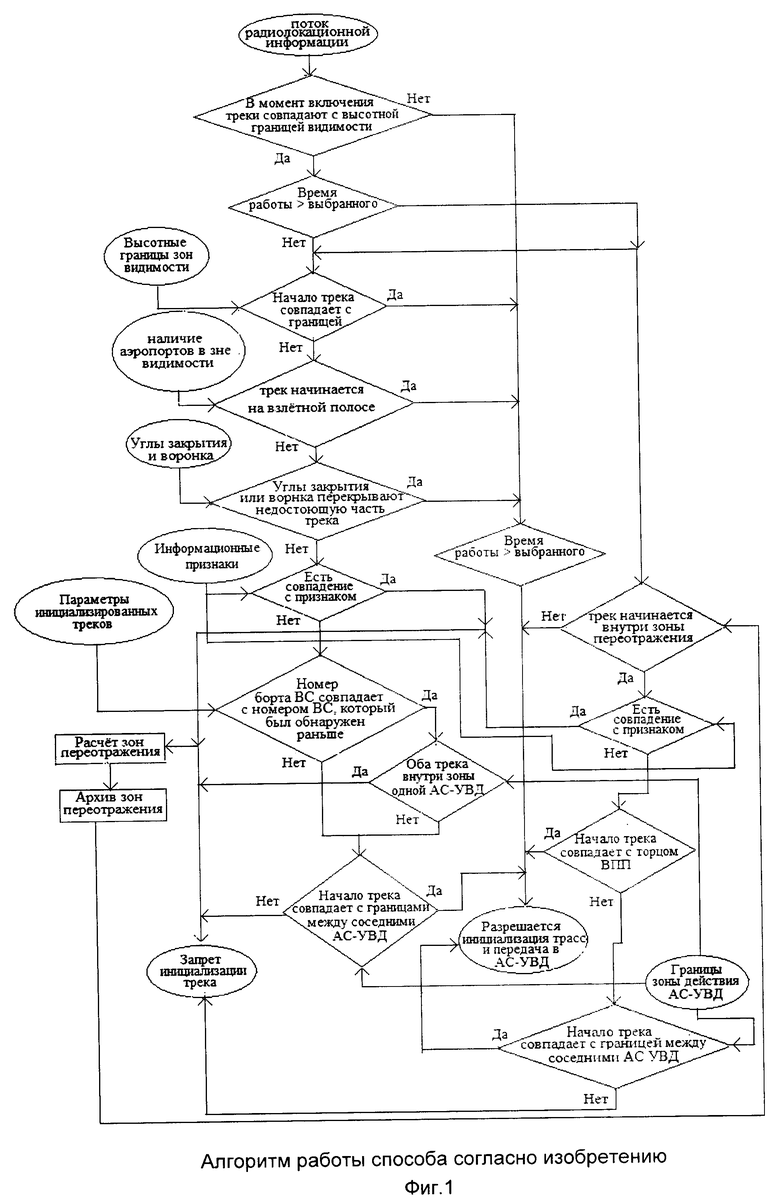
1. Способ обработки радиолокационной информации, включающий в себя следующие этапы:
a) пространственно-временная обработка;
b) операция запрета инициализации ложных трасс,
отличающийся тем, что
на этапе а) устанавливают время блокировки потока данных непосредственно в решающее устройство до момента завершения формирования карты зон переотражений, выполняют операцию подготовки данных, включающую в себя операцию исключения из рассмотрения трасс, которые в момент включения находились не на границе видимости, выполняют операцию пространственной верификации, включающую в себя операцию определения местоположения первых формуляров трасс относительно границ зоны видимости, относительно углов закрытия, относительно воронки, относительно торцов взлетных полос, если они имеются; и
после этапа а), если местоположение первых формуляров трасс не совпадают с границами, указанными в а), выполняют операцию информационной верификации, включающую в себя операцию сравнения информационной составляющей формуляров инициализируемых трасс с информационной составляющей формуляров ранее инициализированных трасс, но в настоящий момент существующих, на наличие в них дублированного номера борта, при наличии которого выполняют операцию определения размещения первых формуляров трасс относительно границ с соседними автоматизированными системами управления воздушным движением (AC-УВД), если они имеются, кроме того выполняют операцию расчета зон переотражений, операцию формирования архивации зон переотражений, операцию определения принадлежности инициализируемых треков к зонам переотражений и операцию преобразования координат в формат WGS-84 для отображения зон переотражений на контрольном индикаторе.
2. Устройство для уменьшения вероятности завязки ложных трасс, включающее в себя систему пространственно-временной обработки, блок завязки трасс, выход которого является выходом устройства, отличающееся тем, что устройство дополнительно содержит:
архив параметров инициализированных трасс; блок верификации информационных признаков; блок расчета зон переотражений; архив зон переотражений; блок принятия решений; преобразователь координат в формат WGS-84, первый вход которого соединен с архивом зон переотражений и первый выход которого является выходом устройства; архив углов закрытия и архив высотных границ видимости,
причем выход архива параметров инициализированных трасс соединен со вторым входом блока верификации информационных признаков, первый выход блока верификации информационных признаков соединен с блоком расчета зон переотражений, первый выход блока расчета зон переотражений соединен с первым входом архива зон переотражений, первый выход архива зон переотражений соединен с первым входом блока принятия решений и первый выход блока принятия решений соединен с вторым входом блока завязки трасс,
при этом система пространственно-временной обработки дополнена блоком подготовки данных, первый вход которого является входом устройства и первый выход которого соединен с первым входом блока пространственно-временной обработки; второй выход блока подготовки данных выполнен с возможностью подключаться к четвертому входу блока принятия решений только после завершения формирования карты зон переотражений, а третий вход блока пространственно-временной обработки выполнен с возможностью соединяться с первым выходом архива углов закрытия; и второй вход блока пространственно-временной обработки соединен с первым выходом архива высотных границ видимости.
| СПОСОБ ОБРАБОТКИ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ С МАЛОЙ ВЕРОЯТНОСТЬЮ ЗАВЯЗКИ ЛОЖНЫХ ТРАСС | 2014 |
|
RU2586623C2 |
| СПОСОБ РАСПОЗНАВАНИЯ ЛОЖНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ ПРИ ДВУХПОЗИЦИОННОМ ЗОНДИРОВАНИИ | 2002 |
|
RU2225624C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ЛОЖНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ | 2007 |
|
RU2348053C1 |
| СПОСОБ РАЗЛИЧЕНИЯ ПОЛЕЗНЫХ И МЕШАЮЩИХ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ НА ВЫХОДЕ ПЕРВИЧНОЙ ОБРАБОТКИ | 2003 |
|
RU2237262C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА (ВАРИАНТЫ) | 2015 |
|
RU2582088C1 |
| RU 94027676 A1, 27.05.1996 | |||
| KR 101970228 B1, 18.04.2019 | |||
| CN 106526554 A, 22.03.2017. | |||

