Заявляемые технические решения относятся к области радиолокации и могут быть использованы в радиолокационных станциях (РЛС) для защиты от импульсных, в том числе ответных, помех.
Большие проблемы работе РЛС создают импульсные помехи со структурой, близкой к структуре зондирующего сигнала. Для постановщика помех импульсная помеха является наиболее энергетически выгодной. Частным случаем импульсных помех являются ответные помехи (Защита от радиопомех / Под ред. М. В. Максимова. М.: Сов. Радио, 1976, с. 60), которые излучают только после приема постановщиком ответной помехи (ПОП) зондирующего сигнала, и импульсные помехи, которые излучают независимо от приема зондирующего сигнала на основе ранее разведанных параметров РЛС. В результате действия импульсных помех происходит обнаружение ложных целей, так как принятые сигналы таких помех не отличаются по структуре от сигналов, отраженных от реальных целей. Высокая эффективность импульсной и, в частности, ответной помехи достигается тем, что постановщик помехи излучает усиленную копию зондирующего сигнала независимо от его уровня. Это при радиолокационном обзоре пространства обеспечивает ее обнаружение не только в главном луче, но и по боковым лепесткам диаграммы направленности антенны (ДНА), в результате чего во всей зоне обзора создается большое число ложных целей, хаотических или неподвижных, в простейшем случае, либо движущихся с установленной постановщиком помехи скоростью. Во всех случаях ложные цели воспринимаются как реальные, поэтому по ним выполняют захват и завязку трассы (С.З. Кузьмин. Основы проектирования систем цифровой обработки радиолокационной информации, с. 109) с последующим ее сбросом в случае ложных целей, формируемых несинхронной импульсной помехой. В результате ответная помеха приводит к перегрузке устройств обработки сигнала и сопровождения трасс целей и к маскировке реальных целей.
Известны способы радиолокационного обзора пространства в условиях воздействия помех, при которых обеспечивается подавление помех однопозиционной РЛС за счет применения АРУ, ограничения или компенсации (Теоретические основы радиолокации / Под редакцией Я.Д. Ширмана, Сов. Радио, М.: 1978, с. 298-302, 346-347), а также диаграммообразующие способы подавления помех (патент RU 2291459 от 01.2006 г).
Недостаток известных способов радиолокационного обзора пространства состоит в том, что в случае действия помехи с высоким уровнем мощности они не обеспечивают подавления помехи, поскольку она по своей структуре не отличается от сигналов, отраженных от реальных целей, а по уровню может значительно превосходить уровень этих сигналов.
Таким образом, известные способы радиолокационного обзора пространства не обеспечивают подавление импульсных и ответных помех, имитирующих цель.
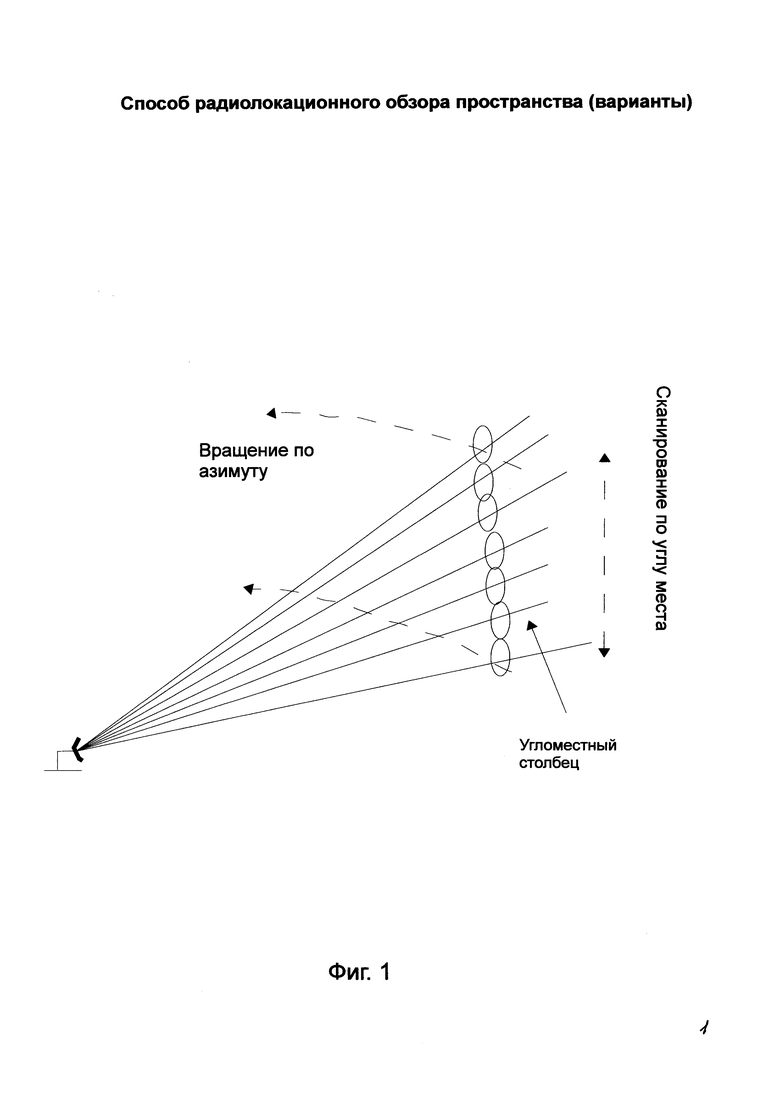
Известен наиболее близкий способ радиолокационного обзора пространства (Справочник по радиолокации под ред. М. Скольника т. 4 с. 72 М «Сов. Радио» 1978 г.), основанный на быстром сканировании по углу места с одновременным медленным вращением антенны в азимутальной плоскости, при этом образуются угломестные столбцы осмотренных направлений (фиг. 1).
Достоинство такого способа состоит в возможности трехкоординатного обзора всего пространства однопозиционной, однолучевой РЛС.
Недостаток наиболее близкого способа радиолокационного обзора пространства состоит в том, что при воздействии на РЛС в одном из угловых направлений мощных ответных помех ложные цели будут обнаруживаться сразу во всем угломестном столбце за счет приема сигналов помехи в области боковых лепестков ДНА и невозможности ее подавления. Но исключить перегрузку устройств обработки и сопровождения трасс целей можно и без подавления помехи, если ее распознать.
Таким образом поставленной задачей (техническим результатом) является распознавание сигналов помехи, имитирующих цель, во всем угломестном столбце.
Задача решается на основе использования свойств сигналов, излученных из одной точки, определения и периодического уточнения в процессе работы параметров этих сигналов по полученным образцам и использование их в качестве эталонов сигналов помехи, имитирующих цель.
Поставленная задача (технический результат) по первому варианту решается тем, что в способе радиолокационного обзора пространства, основанном на сканировании угломестного столбца, согласно изобретению при очередном зондировании изменяют параметры зондирующего сигнала, считают принятые сигналы помехой, имитирующей цель, во всем угломестном столбце на дальностях, на которых в осмотренном направлении обнаружены сигналы с прежними параметрами.
Поставленная задача (технический результат) решается также тем, что для изменения параметров зондирующего сигнала с частотной модуляцией (ЧМ) изменяют ее закон на зеркальный.
Поставленная задача (технический результат) решается также тем, что считают помехой, имитирующей цель. во всем угломестном столбце сигналы, принятые на дальностях, на которых при осмотре нижних направлений обнаружены сигналы с измененными параметрами, но за пределами прямой видимости РЛС.
Поставленная задача (технический результат) решается также тем, что считают помехой, имитирующей цель сигналы, принятые во всем угломестном столбце на дальностях, на которых обнаружены сигналы с измененными параметрами и в пределах прямой видимости, если они коррелированы с сигналами, обнаруженными за пределами прямой видимости РЛС.
Поставленная задача (технический результат) решается также тем, что сигналы считают коррелированными, если их уровни совпадают в режиме линейного приема и в режиме приема с ограничением, или если совпадают их автокорреляционные функции.
Поставленная задача (технический результат) по второму варианту решается тем, что в способе радиолокационного обзора пространства, основанном на сканировании угломестного столбца, согласно изобретению вводят задержку излучения зондирующего сигнала или пропускают очередное зондирование, считают помехой, имитирующей цель, сигналы, обнаруженные за пределами инструментальной дальности, а также сигналы, совпадающие с ними по дальности во всем угломестном столбце.
Суть работы способа по первому варианту состоит в следующем.
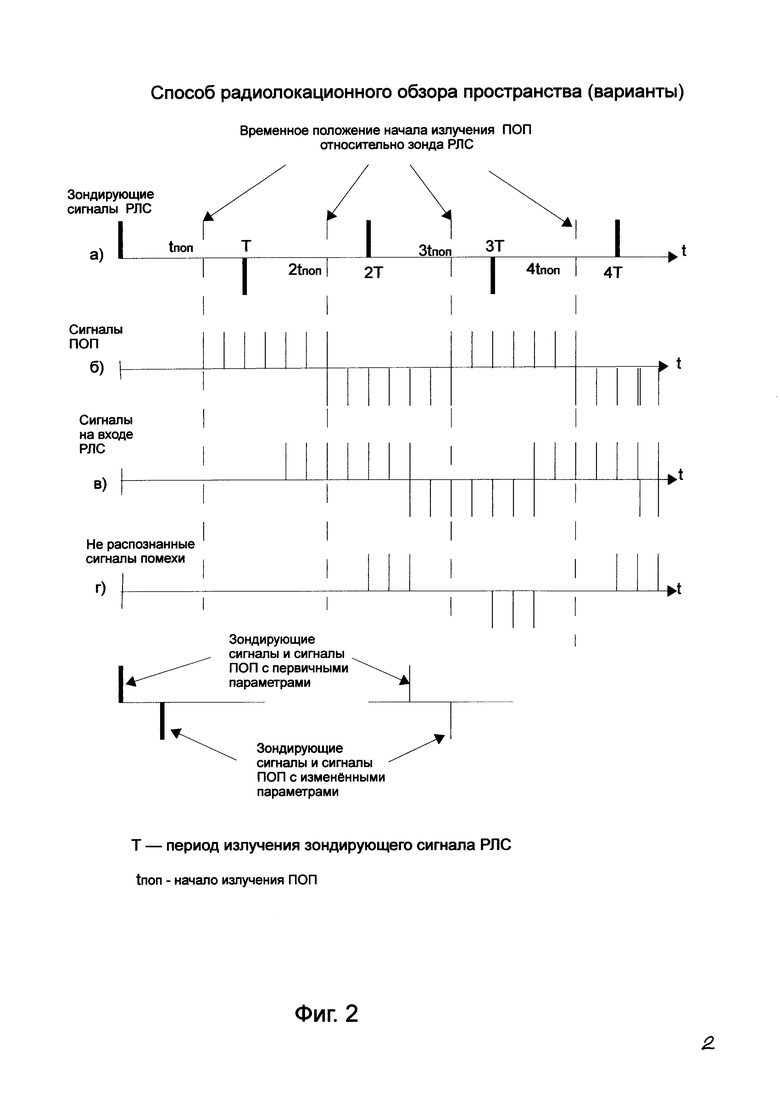
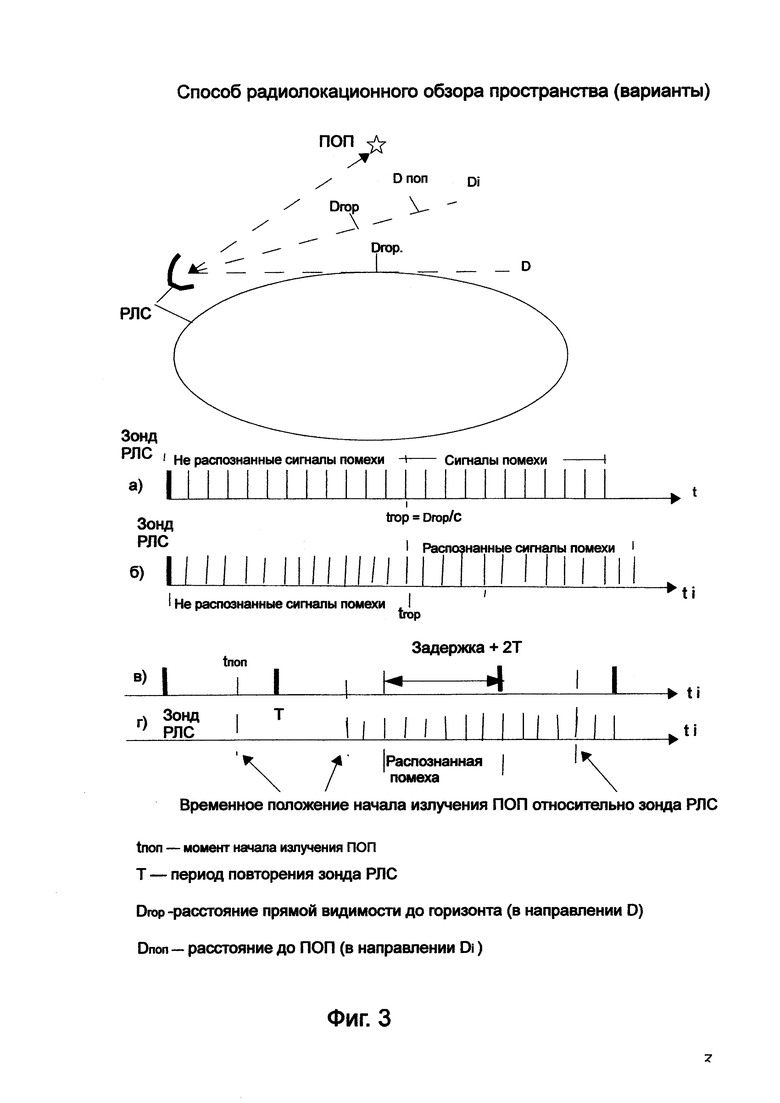
Если в осматриваемой РЛС зоне имеется постановщик ответной помехи, то он, после получения сигнала РЛС, начинает излучать помеху в виде его копии. При этом, принимая прямые сигналы РЛС, он может принимать их, находясь в области боковых лепестков ДНА (и даже фона) на больших расстояниях от РЛС. РЛС принимает эти сигналы ПОП, в том числе и боковыми лепестками ДНА (так как на нее воздействует прямой мощный сигнал, излученный ПОП), как отраженные сигналы от реальных целей во всем угломестном столбце. Для распознавания сигналов помехи, имитирующей цель, при осмотре очередного направления излучения в угломестном столбце или при следующем излучении зонда в том же направлении, изменяют параметры зондирующего сигнала и считают сигналы помехой, имитирующей цель, все принимаемые сигналы с предыдущими параметрами. Эти сигналы являются помехой, которую необходимо распознать. На фиг. 2 приведены диаграммы, поясняющие распределение во времени: зондирующих сигналов РЛС (фиг. 2а); сигналов, излучаемых ПОП после облучения зондирующими сигналами (фиг. 2б); сигналов, поступающих на вход РЛС (фиг. 2в) и не распознанных сигналов помехи (фиг. 2г). Из приведенных диаграмм видно, что на интервалах дальности до ПОП Dпоп=tпоп хс помеха распознается, а вот на дальностях за Dпоп и до конца инструментальной дальности РЛС Dи=Тхс (где с - скорость света) помеха не распознается и ее сигналы будут восприниматься как отраженные от реальных целей, поскольку ПОП после получения зондирующего сигнала с измененными параметрами начинает излучать его усиленные копии. То есть, если ПОП находится дальше инструментальной дальности Dи РЛС, то все помехи, имитирующие цель, будут распознаны во всем угломестном столбце, а в случае, когда ПОП находится на расстоянии Dпоп, меньшем инструментальной дальности Dи (как показано на фиг. 2), помехи, имитирующие цель, на дальностях больших расстояния Dпоп не распознаются. В этом случае используют дополнительные меры, обеспечивающие распознавание помех, имитирующих цель. А именно, считают помехой, имитирующей цель, все сигналы, если они приняты на дальностях за пределами прямой видимости РЛС Dгор=tгор хс (в нижних углах угломестного столбца), поскольку при этом прямая видимость РЛС ограничена горизонтом (фиг. 3). Считают помехой, имитирующей цель, сигналы с измененными параметрами принятые и в пределах Dгор в направлении Di, если эти сигналы коррелированы с сигналами, обнаруженными за пределами прямой видимости Dгор в направлении D. Сигналы считают коррелированными, если их уровни одинаковы и в режиме линейного приема сигналов и в режиме приема сигналов с ограничением или равны их автокорреляционные функции. Равенство амплитуд сигналов, принятых на разных дальностях в линейном режиме и в режиме с ограничением (это означает идентичность их фазовой структуры), а также равенство их автокорреляционных функций является признаком излучения сигналов из одной точки.
В случае использования сигнала с частотной модуляцией для сохранения возможности селекции движущихся целей изменение его параметров выполняют путем изменения ее закона на зеркальный.
Суть работы способа по второму варианту состоит в следующем.
Если в осматриваемой РЛС зоне имеется постановщик ответной помехи, то после облучения зондирующим сигналом РЛС он начинает излучать его копии, РЛС принимает эти сигналы как отраженные от реальных целей в пределах инструментальной дальности Di. Для распознавания помехи, имитирующей цель, задерживают или пропускают очередное излучение зонда (фиг. 3в), продолжают вести прием сигналов на временном интервале от начала задержки до начала следующего зондирования. Так как ПОП излучает копии зондирующего сигнала до приема следующего зонда с установленными временными интервалами, то принятые в этом временном интервале сигналы считают помехой, имитирующей цель, а также считают помехой сигналы, совпадающие с ними по дальности во всем угломестном столбце.
Изобретение иллюстрируется чертежами:
Фиг. 1 - диаграмма, поясняющая работу прототипа;
Фиг. 2 - диаграммы, поясняющие работу изобретения по первому варианту;
Фиг. 3 - диаграммы, поясняющие работу изобретения по первому и второму вариантам.
Рассмотрим более подробно принцип работы предлагаемого изобретения по первому варианту с помощью диаграмм, приведенных на фиг. 2 и фиг. 3а, б.
На первой диаграмме (фиг. 2а) показано распределение во времени зондирующих сигналов РЛС с первичными и измененными параметрами с периодом повторения Т, определяющим инструментальную дальность РЛС Dи.=Тхс.
На второй диаграмме (фиг. 2б) показано распределение сигналов, излученных ПОП после приема им сигналов РЛС с задержкой tпоп, определяемой расстоянием Dпоп от ПОП до РЛС.
На третьей диаграмме (фиг. 2в) приведено распределение сигналов, поступающих на вход РЛС с задержкой, равной удвоенной задержке начала излучения ПОП - 2 tпоп.
На четвертой диаграмме (фиг. 2г) приведено распределение во времени нераспознанных сигналов помех. Принятые сигналы подвергаются распознаванию, если они приходят с расстояния меньшего, чем расстояние до ПОП - Dпоп. Сигналы, пришедшие с расстояния от Dпоп до конца инструментальной дальности Dи, не распознаются и считаются реальными целями. Их распознавание производят по наличию корреляционных связей с распознанными сигналами помехи, имитирующей цель, (равенство уровней на одинаковой дальности в угломестном столбце в случае приема сигналов в линейном режиме и приема сигналов в режиме с ограничением, равенство их автокорреляционных функций).
На диаграмме фиг. 3а показано распределение сигналов, принятых в нижних углах угломестного столбца до горизонта и за ним. Сигналы, принятые на дальностях больше прямой видимости Dгор (за горизонтом), могут быть только помехой, имитирующей цель. При этом (фиг. 3б) все сигналы, принятые в угломестном столбце в направлении Di, имеющие такую же дальность, считают помехой, имитирующей цель.
Таким образом решается поставленная задача и достигается технический результат по первому варианту.
На диаграмме (фиг. 3в) приведено временное распределение сигналов по второму варианту при использовании задержки излучения зонда для распознавания помехи. Помеху распознают на временном интервале от начала задержки и до начала излучения следующего зондирующего сигнала (фиг. 3г). Все сигналы, совпадающие с ними по времени задержки приема (по дальности) во всем угломестном столбце, считают помехой, имитирующей цель.
Таким образом решается поставленная задача и достигается технический результат по второму варианту.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ радиолокационного обзора пространства | 2015 |
|
RU2618675C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА (ВАРИАНТЫ) | 2015 |
|
RU2596851C1 |
| СПОСОБ ЗАЩИТЫ ОТ ИМПУЛЬСНЫХ ПОМЕХ (ВАРИАНТЫ) | 2014 |
|
RU2549373C1 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ СИНХРОННЫХ ОТВЕТНЫХ ПОМЕХ | 2014 |
|
RU2557253C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ЛОЖНЫХ СИГНАЛОВ | 2015 |
|
RU2596853C1 |
| СПОСОБ ОБЗОРА ПРОСТРАНСТВА (ВАРИАНТЫ) | 2014 |
|
RU2554092C1 |
| СПОСОБ РАСПОЗНАВАНИЯ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ, ИМИТИРУЮЩИХ ЦЕЛЬ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569490C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ПОСТАНОВЩИКА ИМПУЛЬСНОЙ ПОМЕХИ (ВАРИАНТЫ) | 2015 |
|
RU2586077C1 |
| СПОСОБ ОБРАБОТКИ РАДИОЛОКАЦИОННОГО СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569496C1 |
| Способ пеленгации постановщика ответной помехи и радиолокационное устройство для его осуществления | 2016 |
|
RU2638317C2 |
Изобретение относится к области радиолокации и может быть использовано в радиолокационных станциях (РЛС) для защиты от импульсных, в том числе ответных, помех. Достигаемый технический результат изобретения - распознавание сигналов помехи, имитирующих цель, во всем угломестном столбце. Указанный технический результат по первому варианту достигается тем, что в способе радиолокационного обзора пространства, основанном на сканировании угломестного столбца, при очередном зондировании изменяют параметры зондирующего сигнала, считают помехой, имитирующей цель, сигналы во всем угломестном столбце, принятые на дальностях, на которых в осмотренном направлении обнаружены сигналы с прежними параметрами. Указанный технический результат по второму варианту достигается тем, что в способе радиолокационного обзора пространства, основанном на сканировании угломестного столбца, вводят задержку излучения зондирующего сигнала или пропускают очередное зондирование, считают помехой, имитирующей цель, сигналы, обнаруженные за пределами инструментальной дальности, а также сигналы, совпадающие с ними по дальности во всем угломестном столбце. 2 н. и 4 з.п. ф-лы, 3 ил.
1. Способ радиолокационного обзора пространства, основанный на сканировании угломестного столбца, отличающийся тем, что при очередном зондировании изменяют параметры зондирующего сигнала, считают помехой, имитирующей цель, сигналы во всем угломестном столбце, принятые на дальностях, на которых в осмотренном направлении обнаружены сигналы с прежними параметрами.
2 Способ по п. 1, отличающийся тем, что для изменения параметров зондирующего сигнала с частотной модуляцией изменяют ее закон на зеркальный.
3. Способ по п. 1, отличающийся тем, что считают помехой, имитирующей цель, сигналы во всем угломестном столбце, принятые на дальностях, на которых при осмотре нижних направлений обнаружены сигналы с измененными параметрами, но за пределами прямой видимости радиолокационной станции (РЛС).
4. Способ по п. 1, отличающийся тем, что считают помехой, имитирующей цель, сигналы во всем угломестном столбце, принятые на дальностях, на которых обнаружены сигналы с измененными параметрами и в пределах прямой видимости, если они коррелированы с сигналами, обнаруженными за пределами прямой видимости РЛС.
5. Способ по п. 4, отличающийся тем, что сигналы считают коррелированными, если их уровни совпадают в режиме линейного приема сигналов и в режиме приема сигналов с ограничением или если совпадают их автокорреляционные функции.
6. Способ радиолокационного обзора пространства, основанный на сканировании угломестного столбца, отличающийся тем, что вводят задержку излучения зондирующего сигнала или пропускают очередное зондирование, считают помехой, имитирующей цель, сигналы, обнаруженные за пределами инструментальной дальности, а также сигналы, совпадающие с ними по дальности во всем угломестном столбце.
| Справочник по радиолокации | |||
| Под ред | |||
| СКОЛНИКА М | |||
| Москва, "Советское радио", 1978, т.4, с.72 | |||
| СПОСОБ ОСМОТРА ЗОНЫ ОБЗОРА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2345380C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА | 2011 |
|
RU2478981C2 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ С ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКОЙ ОТ ПАССИВНЫХ ПОМЕХ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1990 |
|
RU2237906C2 |
| US 5315305 A, 24.05.1994 | |||
| Устройство для дозирования жидких и супучих материалов | 1977 |
|
SU618641A1 |
| JP 2010197103 A, 09.09.2010. | |||

