ОБЛАСТЬ ТЕХНИКИ
Предлагаемое изобретение относится к системам управления, а именно к автоматизированным системам, построенным на базе средств вычислительной техники, для управления полетами, заходом на посадку и посадкой вертолетов для оборудования стартовых командных пунктов надводных кораблей и диспетчерских пунктов, размещаемых на судах, кораблях и нефте и газодобывающих платформах.
Известны радиотехнические системы ближней навигации (РСБН), построенные по азимутально-дальномерному принципу, состоящие из наземного оборудования и оборудования, установленного на борту летательного аппарата (Радиотехнические системы, под ред. Казаринова Ю.М., М., Академия, 2008 г.).
Данные системы осуществляют измерение на борту ЛА дальности методом «запрос-ответ» (запросчик - бортовое оборудование ЛА, ответчик - наземное оборудование) и определение на борту азимута на наземный радиомаяк путем измерения временного интервала между моментами приема на борту сигнала от равномерно-вращающейся направленной антенны наземного оборудования азимутального канала РСБН и «северного канала» излучаемого ненаправленной антенной наземного оборудования азимутального канала РСБН («северный канал» формируется в момент разворота направленной антенны на север).
Недостатком РСБН является то, что они позволяют измерять координаты только на борту ЛА и только относительно радиомаяка. Кроме того данные системы не обеспечивают решение задач автоматизации процесса управления посадкой летательного аппарата на судно, корабль, морскую платформу или наземный аэродром, а также не обеспечивают управление взлетом летательных аппаратов.
Известно изобретение «Комплексная система посадки летательных аппаратов и способ завода на посадку», защищенная патентом РФ №2239203 (заявка №2003110468 с приоритетом от 02.04.2003), МПК G01С 1/00, опубл. 27.10.2004).
Система содержит наземную аппаратуру, включающую последовательно соединенные между собой клеммами «выход» - «вход» посадочный радиолокатор, блок обработки информации, блок вычисления координат, наземный видеопреобразователь, индикатор диспетчера посадки, входящий в пульт диспетчера посадки, бортовую аппаратуру, включающую последовательно соединенные между собой клеммами «выход»-«вход» пилотажно-навигационный блок, бортовой видеопреобразователь, индикатор пилота, входящий в пульт пилота, двустороннюю линию передачи данных с наземными и бортовыми приемниками, передатчиками и антенными системами, бортовые формирователи векторов текущих курсовой и глиссадной скоростей и наземный разделитель векторов курсовой и глиссадной скоростей, причем выход блока вычисления координат одновременно подключен к входу наземного передатчика, входы бортовых формирователей текущих курсовой и глиссадной скоростей подключены к первому дополнительному выходу пилотажно-навигационного блока, выходы бортовых формирователей векторов текущих и глиссадной скоростей подключены к входам бортового передатчика и одновременно соответственно к первому второму дополнительным входам бортового видеопреобразователя, выход наземного приемника через разделитель векторов курсовой и глиссадной скоростей подключен к первому и второму дополнительным входам наземного видеопреобразователя, а также содержит преобразователь параметров границ вертикальной и горизонтальной видимости, формирователи векторов скоростей ветра по курсу и глиссаде, бортовые формирователи векторов оптимальных курсовой и глиссадной скоростей, бортовой разделитель наземной информации, при этом выходы формирователей скоростей ветра по курсу и глиссаде соединены с первым дополнительным входом блока вычисления координат, второй дополнительный вход которого соединен с выходом преобразователя параметров границ вертикальной и горизонтальной видимости, выход бортового приемника двусторонней линии передачи соединен с входом бортового разделителя наземной информации, первый выход которого соединен с дополнительным входом пилотажно-навигационного блока, а второй выход соединен с первыми входами бортовых формирователей оптимальных курсовой и глиссадных скоростей, вторые входы которых соединены с вторым дополнительным выходом пилотажно-навигационного блока, а выходы которых соединены соответственно с третьим и четвертым дополнительными входами бортового видеопреобразователя и дополнительными входами бортового передатчика.
Система обеспечивает формирование не только векторов текущих скоростей, но и векторов оптимальных скоростей по курсу и глиссаде, а в процессе посадки производится совмещение соответствующих векторов скоростей.
Недостатком системы является необходимость наличия на борту летательного аппарата и на посадочной площадке специальной аппаратуры ближней навигации. При отсутствии такой аппаратуры на борту вертолета посадка не обеспечивается.
Кроме того данная система не обеспечивает:
- управление посадкой летательных аппаратов с корабля, судна, морской платформы;
- управление взлетом летательных аппаратов с корабля, судна, морской платформы;
- решение задач автоматизации процесса управления посадкой летательного аппарата на судно, корабль или морскую платформу;
- решение задач автоматизации процессов управления взлетом летательных аппаратов;
- автоматизацию процессов управления, в том числе автоматический контроль условий взлета и посадки по гидрометеоусловиям и качке, автоматическую выработку рекомендаций по направлению взлета вертолета и маршруту выхода в точку передачи управления, маршруту выхода на глиссаду, контролю опасного сближения с воздушными объектами, выработку рекомендаций по курсу движения судна (корабля) для обеспечения взлета и посадки и т.д.;
- отображение воздушной и надводной обстановки в ближней зоне от корабля, судна, платформы;
- отображение навигационной карты и первичной информации источников;
- отображение видеоинформации от видеокамер о вертолете, взлетно-посадочной площадке, вертолетном ангаре;
- документирование информации, ее воспроизведение и печать.
Известно изобретение «Комплексная система посадки летательных аппаратов и способ захода на посадку», защищенная патентом РФ №2273590 (заявка №2004133461 с приоритетом от 16.11.2004), МПК B64D 45/04, B64F 1/18, опубл. 10.04.2006.
Система содержит посадочный радиолокатор, блок обработки информации, блок вычисления координат, наземный и бортовой видеопреобразователи, индикаторы диспетчера посадки и пилота, пульты диспетчера посадки и пилота, пилотажно-навигационный блок, двустороннюю линию передачи данных, бортовые формирователи векторов текущей курсовой и глиссадной скоростей, наземный разделитель векторов курсовой и глиссадной скоростей, узлы метеоинформации, бортовые формирователи векторов оптимальной курсовой и глиссадной скоростей, бортовой разделитель наземной информации. Дополнительно использованы радиолокатор обзора летного поля, формирователь карты летного поля, базы данных аэропорта, рельефа, формирователи проекций рельефа, переключатели масштабов. Особенностью системы является совмещение отображений линий курса и глиссады с отображениями рельефа местности и карты летного поля в трех масштабах, определяемых различными этапами осуществления посадки. Способ посадки определяет порядок изменения зон отображения линий курса и глиссады в соответствии с изменяющейся дальностью при совмещении пилотом векторов текущих курсовой и глиссадной скоростей с соответствующими векторами оптимальных скоростей. Достигаемый технический результат - повышение безопасности полетов при заходе на посадку и ее осуществлении, снижение психологической нагрузки пилота и диспетчера.
Система обеспечивает идентичное восприятие полетной информации диспетчером посадки и пилотом при непрерывном наблюдении векторов скоростей ЛА на индикаторах курса и глиссады, кроме того в процессе посадки производится совмещение соответствующих векторов скоростей, что повышает безопасность выполнения посадки.
Недостатком системы является необходимость наличия на борту летательного аппарата и на посадочной площадке специальной аппаратуры ближней навигации. При отсутствии такой аппаратуры на борту вертолета посадка не обеспечивается.
Кроме того, данная система не обеспечивает:
- управление посадкой летательных аппаратов с корабля, судна, морской платформы;
- управление взлетом летательных аппаратов с корабля, судна, морской платформы;
- решение задач автоматизации процесса управления посадкой летательного аппарата на судно, корабль или морскую платформу;
- решение задач автоматизации процессов управления взлетом летательных аппаратов;
- автоматизацию процессов управления, в том числе автоматический контроль условий взлета и посадки по гидрометеоусловиям и качке, автоматическую выработку рекомендаций по направлению взлета вертолета и маршруту выхода в точку передачи управления, маршруту выхода на глиссаду, контролю опасного сближения с воздушными объектами, выработку рекомендаций по курсу движения судна (корабля) для обеспечения взлета и посадки и т.д.;
- отображение воздушной и надводной обстановки в ближней зоне от корабля, судна, платформы;
- отображение навигационной карты и первичной информации источников;
- отображение видеоинформации от видеокамер о вертолете, взлетно-посадочной площадке, вертолетном ангаре;
- документирование информации, ее воспроизведение и печать.
Известна полезная модель «Цифровой вычислительный комплекс системы управления», защищенная патентом РФ №127965 (заявка №2012155503 с приоритетом от 20.12.2012), МПК G06F 15/00, опубл. 10.05.2013).Цифровой вычислительный комплекс системы управления (ЦВКСУ) содержит первую и вторую электронные вычислительные машины (ЭВМ), группу автоматизированных рабочих мест (АРМ) 1, …, n операторов управления, группу ЭВМ 1, …, m обмена данными с внешними абонентами, АРМ документирования, ЭВМ обмена данными по командно-сигнальным трактам и пульт управления, отличающийся тем, что в него дополнительно введены первая и вторая локальные вычислительные сети (ЛВС), при этом первая и вторая ЭВМ и пульт управления соединены с этой первой ЛВС, к которой подключены также все остальные элементы ЦВКСУ - АРМ операторов управления, ЭВМ обмена данными с внешними абонентами по информационно-управляющим трактам, ЭВМ обмена данными с внешними абонентами по командно-сигнальным трактам, АРМ документирования и построения отчетных документов, вторая ЛВС, соединяет первую и вторую ЭВМ, пульт управления выполнен на базе типовой ЭВМ.
Комплекс может использоваться для реализации различных систем управления. Недостатками комплекса являются:
- невозможность решения задач управления взлетом и посадкой вертолетов, а также их полетами в зоне контроля;
- отсутствие устройств приема и обработки первичной радиолокационной и видеоинформации, их обработки для отображения;
- отсутствие средств документирования;
- отсутствие сети для передачи картографической информации и возсможности отображения электронной навигационной карты.
Наиболее близкой по функциональным возможностям и технической сущности к предлагаемому изобретению и принятой за прототип является полезная модель «Радиотехнический комплекс навигации и управления полетами летательных аппаратов морского базирования», защищенная патентом РФ №113243 (заявка №2011122848 с приоритетом от 06.06.2011), МПК B64F 1/18, опубл. 10.02.2012. Комплекс включает установленные в подвижном центре управления полетами морского базирования и на борту летательного аппарата комплексы оборудования радиотехнической системы ближней навигации (РСБН) с линией передачи данных в дальномерном канале и комплекты аппаратуры пользователей спутниковой навигационной системы (СНС), подключенные соответственно к комплексу навигации и управления подвижного центра управления полетами морского базирования через дополнительно установленное автоматизированное рабочее место (АРМ) и к пилотажно-навигационному комплексу летательного аппарата (ЛА) через дополнительно установленное навигационное вычислительное устройство.
Полезная модель предназначена для обеспечения навигации и управления полетами летательных аппаратов (ЛА) из подвижного центра управления полетами морского базирования, обеспечения полетов летательных аппаратов на корабли, морские нефте-газодобывающие платформы и взаимно скоординированного выполнения ЛА задач взаимодействия с другими ЛА и подвижными морскими объектами, в том числе выполнение полета по заданному маршруту, выхода летательных аппаратов в заданные точки морской поверхности, захода на посадку.
Недостатками комплекса является необходимость наличия на борту летательного аппарата и на посадочной площадке специальной аппаратуры ближней навигации. При отсутствии такой аппаратуры на борту вертолета посадка не обеспечивается, что ограничивает возможности комплекса.
Кроме того данный комплекс не обеспечивает:
- управление посадкой ЛА с корабля, судна, морской платформы;
- управление взлетом ЛА с корабля, судна, морской платформы;
- решение задач автоматизации процессов управления взлетом ЛА;
- решение задач автоматизации процесса управления посадкой ЛА на судно, корабль или морскую платформу;
- автоматизацию процессов управления, в том числе автоматический контроль условий взлета и посадки по гидрометеоусловиям и качке, автоматическую выработку рекомендаций по направлению взлета вертолета и маршруту выхода в точку передачи управления, маршруту выхода на глиссаду, контролю опасного сближения с воздушными объектами, выработку рекомендаций по курсу движения судна (корабля) для обеспечения взлета и посадки и т.д.;
- отображение воздушной и надводной обстановки в ближней зоне от корабля, судна, платформы;
- отображение навигационной карты и первичной (радиолокационной, оптико-электронной, телевизионной) информации источников;
- отображение видеоинформации от видеокамер о вертолете, взлетно-посадочной площадке, вертолетном ангаре;
- документирование информации, ее воспроизведение и печать.
Таким образом известные системы и комплексы не обеспечивают управление процессами взлета, полета и посадки ЛА и автоматизацию данных процессов.
Задачей предлагаемого изобретения является:
- расширение функциональных возможностей системы управления полетами, заходом на посадку и посадкой вертолетов для оборудования стартовых командных пунктов надводных кораблей и диспетчерских пунктов, размещаемых на судах и морских платформах (далее - Система управления);
- расширение круга решаемых задач;
- обеспечение управления взлетом, полетом и посадкой вертолетов;
- автоматизация процессов управления взлетом, полетом и посадкой вертолетов на судно, корабль или морскую платформу;
- повышение безопасности полетов и эффективности управления экипажами вертолетов при взлете, в ближней зоне полетов, при заходе на посадку и посадке на корабль, судно или морскую платформу, в том числе за счет автоматизации процессов управления взлетом и посадкой летательного аппарата на судно, корабль или морскую платформу;
- повышение эффективности процесса принятия решений руководителем полетов и качества вырабатываемых решений при управлении вертолетом за счет полноты информационного обеспечения и удобства восприятия информации, ее автоматизированной обработки и автоматической выработки рекомендаций для руководителя полетов.
Технический результат, достигаемый с помощью предлагаемой системы состоит в:
- расширении функциональных возможностей системы за счет обеспечения посадки вертолетов, не оснащенных аппаратурой посадки с использованием средств ближней навигации, а также посадки вертолетов на посадочные площадки, не оборудование средствами ближней навигации;
- расширении круга решаемых задач за счет:
• контроля условий взлета и посадки вертолета по качке и гидрометеоусловиям, и формирования признаков разрешения или запрета взлета и посадки;
• контроля условий взлета по взлетной массе вертолета и формирования признаков разрешения или запрета взлета и посадки;
• обеспечения выработки рекомендаций по разрешенным секторам взлета и направлению отхода от корабля (судна, платформы);
• обеспечения управления взлетом летательных аппаратов с корабля, судна, морской платформы;
• обеспечения привода вертолета в точку начала глиссады;
• обеспечения контроля прохождения вертолетом маршрута при взлете (до передачи управления) и посадке (после приема управления);
• контроля опасного сближения управляемого вертолета с воздушными объектами и запретными зонами;
• контроля выхода вертолета из зоны действия средств связи и зоны действия информационных средств (радиолокационных и оптико-электронных средств обнаружения и сопровождения);
• отображения воздушной и надводной обстановки в ближней зоне от корабля, судна, платформы;
• отображения навигационной карты и первичной информации источников;
• отображения видеоинформации от видеокамер о вертолете, взлетно-посадочной площадке, вертолетном ангаре;
• документирования информации, ее воспроизведения и печати;
- автоматизации процессов управления за счет:
• автоматического контроля условий взлета и посадки вертолетов;
• автоматического контроля прохождения маршрута;
• автоматического контроля глиссады;
• автоматического контроля опасного сближения управляемого вертолета с воздушными объектами и запретными зонами;
• автоматического формирования и отображения единой картины воздушной и надводной обстановки;
• автоматической выработки команд и рекомендаций на всех этапах полета;
- обеспечении непосредственного управления взлетом, полетом и посадкой вертолетов руководителем полетов;
- повышении безопасности полетов и эффективности управления экипажами вертолетов при взлете, в ближней зоне полетов, при заходе на посадку и посадке на корабль, судно или морскую платформу за счет:
• автоматизации процессов управления взлетом и посадкой летательного аппарата на судно, корабль или морскую платформу;
• автоматического контроля условий взлета и посадки по гидрометеоусловиям и качке;
• автоматической выработки рекомендаций по направлению взлета вертолета и маршруту выхода в точку передачи управления;
• автоматической выработки рекомендаций по маршруту выхода вертолета на глиссаду;
• автоматического контроля глиссады;
• автоматического контроля опасного сближения с воздушными объектами, запретными для полетов зонами;
• автоматической выработки рекомендаций по курсу движения судна (корабля) для обеспечения взлета и посадки вертолета;
- повышении безопасности полетов за счет:
• создания более комфортных условий для работы руководителя полетов;
• снижения нагрузки на РП за счет автоматического контроля процессов взлета, посадки и полета по маршруту и автоматической выработки рекомендаций по управлению экипажем вертолета;
• автоматического решения всех расчетных задач, необходимых для управлению вертолетом на всех этапах;
• автоматического контроля опасности выхода вертолета из зоны действия средств связи;
• автоматического контроля опасности выхода вертолета из зоны видимости корабельных (судовых или платформенных) информационных средств;
• улучшения информационного обеспечения руководителя полетов о всех факторах, влияющих на выполнение взлета, посадки, полета вертолета и безопасность их выполнения;
- повышении эффективности процесса принятия решений руководителем полетов и качества вырабатываемых решений при управлении вертолетом за счет:
• автоматического формирования системой рекомендаций на всех этапах управления вертолетом (разрешение или запрет на взлет и посадку, рекомендации по изменению курса корабля, судна для обеспечения условий взлета и посадки, рекомендации по курсу отхода вертолета от корабля, судна, рекомендации по маршруту движения в точку передачи управления, предупреждения об опасном сдвижении с летательными аппаратами, опасными зонами, о возможном выходе из зоны действия средств связи и информационных средств корабля, судна, сигналы об отклонении от заданного маршрута полета и рекомендации по возврату на маршрут, рекомендации по маршруту выхода в точку начала глиссады, информация об отклонении от заданной глиссады и рекомендации по устранению отклонений);
• отображения воздушной и надводной обстановки в ближней зоне от корабля, судна, платформы;
• отображения электронной навигационной карты и первичной информации источников;
• отображения видеоинформации от видеокамер о вертолете, взлетно-посадочной площадке, в вертолетном ангаре;
- обеспечении документирования информации, ее последующего воспроизведения и вывода на печать.
Поставленная задача решается и требуемый технический результат достигается за счет того, что система управления полетами, заходом на посадку и посадкой вертолетов, содержащая автоматизированное рабочее место руководителя полетов (пульт диспетчера посадки), вычислители и индикаторы (мониторы), содержит устройства сопряжения по цифровым каналам, устройство сопряжения и обработки первичной информации, центральные вычислители и средства документирования информации, подключенные к основной сети, автоматизированное рабочее место руководителя полетов, соединенное входами/выходами с устройством сопряжения и обработки первичной информации и подключенное к картографической сети и основной сети.
Устройства сопряжения системы управления и автоматизированное рабочее место соединяются входами/выходами с системами и комплексами корабля (судна, платформы). Картографическая сеть подключается к внешнему картографическому серверу.
При этом автоматизированное рабочее место руководителя полетов (далее АРМ РП) содержит не менее двух (две или три) графических станций и главный управляющий компьютер, подключенные к локальной сети, видеосервер, соединенный выходом с входами графических станций, устройство отображения и ввода информации, соединенное входами/выходами с главным управляющим компьютером, устройство управления курсором и клавиатуру, соединенные входами/выходами с коммутатором, который соединен входами/выходами с графическими станциями и главным управляющим компьютером, терминал управления средствами связи и терминал управления техническими средствами обеспечения полетов, подключенные к основной сети, подключенной также к видеосерверу и главному управляющему компьютеру, графические станции подключены к сети картографической информации системы и устройству сопряжения и обработки первичной информации.
Графическая станция содержит монитор, соединенный входами/выходами с вычислителем, входы/выходы которого являются входами/выходами графической станции.
Терминал управления техническими средствами обеспечения полетов содержит устройство отображения и ввода информации, соединенное входами/выходами с вычислителем, входы/выходы которого являются входами/выходами терминала.
Терминал управления средствами связи содержит устройство отображения и ввода информации, соединенное входами/выходами с вычислителем, соединенным входом с микрофоном, выходом - с входом устройства воспроизведения звука, а его входы/выходы являются входами/выходами терминала.
Система управления с использованием устройств сопряжения сопрягается(подключается по каналам обмена информации, например, Ethernet, Манчестер, RS-422, RS-232) со следующими системами корабля (судна, морской платформы):
- информационно-управляющей системой;
- комплексом гидрометеорологического обеспечения;
- системой инерциальной навигации и стабилизации;
- системой приемо-индикаторов спутниковой навигационной системы (СНС);
- карт-сервером;
- гирокомпасом;
- лагом;
- электронной картографической навигационно-информационной системой (ЭКНИС) или системой счисления и прокладки;
- информационными средствами корабля (судна, морской платформы), обеспечивающими информацией о воздушной и надводной обстановке в зоне контроля системы (радиолокационные станции, автоматические информационные системы - АИС, оптико-электронные системы);
- видеокамерами;
- средствами связи;
- техническими средствами обеспечения полетов.
При этом система обеспечивает прием от сопрягаемых систем, обработку, хранение и отображение:
- текущего времени и даты (от системы приемо-индикаторов спутниковой навигационной системы);
- электронной навигационной карты (ЭНК) от картсервера;
- первичной (от источника по выбору РП)и вторичной информации о воздушной и надводной обстановке (от информационных средств);
- формуляров и трасс объектов (целей) от информационных средств;
- координат, курса и скорости движения корабля (судна) от системы инерциальной навигации и от системы приемо-индикаторов спутниковой навигационной системы;
- данных о качке корабля (судна, морской платформы) от системы инерциальной навигации;
- данных о гидрометеорологической обстановке в районе плавания корабля(судна) или районе местонахождения платформы (от комплекса гидрометеорологического обеспечения и информационно-управляющей системы);
- данных о воздушном потоке над взлетно-посадочной площадкой (ВППл) корабля (судна, морской платформы)от комплекса гидрометеорологического обеспечения;
- данных о реперной точке (от информационно-управляющей системы или ручным вводом РП);
- плановой таблицы полетов, информации о запасных аэродромах и ВППл (от информационно-управляющей системы или ручным вводом РП);
- информации о готовности вертолетов (ручным вводом РП или по каналам обмена от информационно-управляющей системы);
- заданных маршрутов полета управляемых вертолетов и решаемой задаче (от информационно-управляющей системы или ручным вводом РП);
- информации о состоянии сопрягаемых систем, режимах их работы.
Система обеспечивает:
- ввод, хранение и отображение электронной документации РП;
- прием, обработку и отображение видеоинформации с видеокамер:
• о взлете, заходе на посадку и посадке вертолета,
• о работах в вертолетном ангаре;
• о работе РП в диспетчерском (стартовом командном) пункте судна, платформы (корабля).
Система обеспечивает автоматическое решение следующих задач:
- обработка и отождествление данных, поступающих от информационных средств и формирование единой картины воздушной и надводной обстановки в зоне контроля(в автономном режиме работы), либо прием, отображение и использование единой картины воздушной и надводной обстановки от информационно-управляющей системы корабля (судна, платформы);
- формирование рекомендаций по маневрированию корабля (судна) в интересах обеспечения безопасности выполнения взлетно-посадочных операций вертолета;
- назначение секторов взлета и посадки вертолетов;
- контроль выполнения полетного задания и обеспечение безопасности полетов вертолетов;
- привод вертолета в зону действия оптических средств обеспечения посадки корабля (судна, морской платформы);
- контроль положения вертолета относительно заданной траектории захода на посадку.
Система обеспечивает отображение РП на индикаторах АРМ:
- текущего времени и даты;
- электронной навигационной карты (ЭНК);
- первичной (от источника по выбору РП), вторичной и совмещенной информации о воздушной и надводной обстановке;
- формуляров целей и трасс целей;
- координат, курса и скорости движения корабля;
- данных о гидрометеорологической обстановке в районе плавания корабля;
- элементов структуры воздушного пространства в зоне ответственности РП(зона ответственности оператора, сектора взлета и посадки вертолетов);
- данных о качке корабля, о воздушном потоке над ВППл корабля;
- данных о реперной точке;
- плановой таблицы полетов;
- информации о запасных аэродромах и ВППл;
- информации о готовности вертолетов;
- видеоинформации о взлете, заходе на посадку и посадке вертолета, о работах в вертолетном ангаре;
- сигналов разрешения (запрета) запуска двигателей, взлета и посадки вертолета;
- заданных маршрутов полета управляемых вертолетов;
- данных об управляемых вертолетах, показателей контроля полета вертолетов, сигналов тревоги, выработанных рекомендаций по управлению полетом вертолетов;
- заданной траектории захода на посадку и текущего местоположения вертолета относительно нее;
- информации о состоянии системы, сопрягаемых систем, режимах их работы;
- электронной документации РП.
Система обеспечивает документирование:
- воздушной и надводной обстановки (формуляров объектов с данными об их координатах и параметрах движения);
- команд и сигналов, формируемых РП и системой в процессе управления вертолетами;
- переговоров РП по внутрикорабельной (судовой) связи;
- переговоров РП внутри командно-диспетчерского пункта;
- радиообмена с экипажами вертолетов;
- параметров полета вертолетов;
- взаимного положения летательных аппаратов в воздушном пространстве;
- видеоинформации о взлете, заходе на посадку и посадке вертолетов, а также видеоинформации о работах в вертолетном ангаре и работе РП в стартовом командном (диспетчерском) пункте управления.
Заявляемое изобретение поясняется чертежами:
- на фиг. 1 представлена структурная схема заявляемой системы управления;
- на фиг. 2 представлена структурная схема автоматизированного рабочего метаруководителя полетов;
- на фиг. 3 представлена структурная схема взаимодействия системы управления полетами, заходом на посадку и посадкой вертолетов с системами и комплексами корабля (судна, платформы).
Система управления полетами, заходом на посадку и посадкой вертолетов для оборудования стартовых командных пунктов надводных кораблей и диспетчерских пунктов, размещаемых на судах и морских платформах содержит (фиг. 1) автоматизированное рабочее место руководителя полетов 1, группу центральных вычислителей 2 (2.1 -2.n), группу устройств сопряжения 3 (3.1-3.m),устройство сопряжения и обработки первичной информации 4, средство документирования информации 5, основную сеть обмена данными 6, сеть картографической информации 7, причем автоматизированное рабочее место руководителя полетов 1, центральные вычислители (2.1-2.n), устройства сопряжения (3.1-3.m), устройство сопряжения и обработки первичной информации 4, средства документирования информации 5 подключены к основной сети обмена данными 6, объединяющей их в единую систему, автоматизированное рабочее место руководителя полетов 1 подключено к картографической сети 7 и соединено входами/выходами с устройством сопряжения и обработки первичной информации 4.
Автоматизированное рабочее место руководителя полетов содержит (фиг. 2) не менее двух графических станций 8 (две или три) и главный управляющий компьютер 9 (ЭВМ), подключенные к локальной сети 17, видеосервер 11 (ЭВМ), соединенный выходом с входами графических станций 8 (входами их вычислителей 19), устройство отображения и ввода информации 10, соединенное входами/выходами с главным управляющим компьютером 9, устройство управления курсором 14и клавиатуру 13, соединенные входами/выходами с коммутатором 12, который соединен входами/выходами с графическими станциями 8 и главным управляющим компьютером 9, терминал управления средствами связи 15 и терминал управления техническими средствами обеспечения полетов 16, подключены к основной сети 6, подключенной также к видеосерверу 11 и главному управляющему компьютеру 9, графические станции 8 подключены к сети картографической информации системы 7 и устройству сопряжения и обработки первичной информации 4 по сети 26.
Графическая станция 8 содержит монитор 18, соединенный входами/выходами с вычислителем (ЭВМ) 19, входы/выходы которого являются входами/выходами графической станции.
Терминал управления техническими средствами обеспечения полетов 15 содержит устройство отображения и ввода информации 20, соединенное входами/выходами с вычислителем (ЭВМ) 21, входы/выходы которого являются входами/выходами терминала.
Терминал управления средствами связи 16 содержит устройство отображения и ввода информации 22, соединенное входами/выходами с вычислителем (ЭВМ) 23, соединенного входом с микрофоном 25, выходом - с входом устройства воспроизведения звука 24 (динамик, наушники), а его входы/выходы являются входами/выходами терминала.
Вычислитель 21 терминала 15 подключен входами/выходами к техническим средствам обеспечения полетов. Вычислитель 23 терминала 16 подключен входами/выходами к средствам связи и обмена данными.
Средство документирования информации 5 выполняется в виде вычислителя (ЭВМ), соединяемого входами/выходами с принтером. В качестве вычислителя и принтера могут использоваться любые серийно выпускаемые изделия.
В качестве сети 26 может использоваться сеть Ethernet.
На АРМ РП также могут устанавливаться авиационные электромеханические часы и датчик крена.
Устройства отображения и ввода информации 10, 20, 22 выполняются в виде сенсорных экранов, в качестве которых могут использоваться серийно выпускаемые сенсорные экраны. Размер экрана определяется количеством отображаемой на нем информации.
Устройства сопряжения 3 (фиг. 1) выполняются в виде стандартного компьютера (ЭВМ) любого типа, имеющего требуемый набор каналов ввода-вывода и производительность, например:
- промышленные компьютеры фирмы Fastwel МК307, МК306, Бортовой компьютер на базе стандарта StackРС [1];
- встраиваемые промышленные компьютеры фирмы Advantech серии UNO-1100 (UNO-1251G, UNO-1252G, UNO-1372G, UNO-1383G, UNO-1110, UNO-1172AH), серии UND-2100 (UNO-2271G, UNO-2483G, UNO-2473G, UNO-2362G, UNO-2272G, UNO-2184G, UNO-2170, UNO-2171, UNO-2172 [2];
- встраиваемые компьютеры IFC-BOX5700,IFC-BOX5500, IFC-BOX5300, IFC-BOX4000, IFC-MBOX2800, IFC-BOX2957, IFC-BOX2800, IFC-BOX2600 [2,3],
либо в виде установленных в монтажный каркас с объединительной платой процессорного модуля и интерфейсных модулей для сопряжения по требуемым каналам (Ethernet, MIL STD 1553B, RS-422 и др.), например, фирмы Advantech [2].
Количество устройств сопряжения определяется количеством сопрягаемых систем (фиг. 3) и числом каналов связи соответствующего типа, имеющихся в устройствах сопряжения 3, таким образом, чтобы обеспечить подключение всех сопрягаемых систем.
Центральные вычислители 2.1-2.n группы 2 выполняются в виде стандартного компьютера любого типа, имеющего требуемый набор каналов ввода-вывода информации и производительность [1, 2, 3], либо в виде установленных в монтажный каркас с объединительной платой процессорного модуля и интерфейсных модулей для сопряжения по требуемым каналам (например, Ethernet, MIL STD 1553B, RS-422).
Количество центральных вычислителей 2.1-2.n группы 2 определяется требуемым объемом хранимых данных, объемом задач, возлагаемых на данные вычислители, их объемом памяти и производительностью, а также необходимостью резервирования. Минимальное количество центральных вычислителей- один.
Конструктивно устройства сопряжения и центральные вычислители размещаются в тумбах автоматизированного рабочего места или выполняются в виде отдельных приборов настенного или напольного исполнения.
Вычислители 19 графических станций 8 (см. фиг. 2)и главный управляющий компьютер 9 автоматизированного рабочего места руководителя полетов (блок 1 на фиг. 1) выполняются в виде стандартного компьютера любого типа, имеющего требуемый набор каналов ввода-вывода информации и производительность [1, 2, 3].
Видеосервер 12 (см. фиг. 2) выполняются в виде стандартного сервера любого типа, имеющего требуемый набор каналов ввода-вывода информации и производительность, например:
- серверы фирмы HP [15] серий:
• ProLiant DL ( DL160 Gen9, DL320e Gen8 DL320eR08, DL380e Gen8 DL380eR08, DL320e Gen8 v2 DL320eR08 и др.);
• ProLiantSL ( SL160z, SL170s, SL165s, SL2x170z идр.);
- серверы фирмы Dell[16] серии PowerEdge(R220, R630, R415, R320, R515, R715 идр.);
- серверы фирмы Cisco [17] (UCS C220 M4 Rack Server, UCS C240 M4 Rack Server, Cisco UCS C460 M4 Rack Server).
Средства документирования информации 5 выполняются в виде вычислителя (стандартного компьютера любого типа, имеющего требуемый набор каналов ввода-вывода информации и объем памяти [1,2,3]), соединенного входами/выходами с принтером любого типа.
Устройство 4 сопряжения и обработки первичной информации выполняется в виде набора радар-процессоров по числу сопрягаемых источников первичной информации, например:
- радар-процессора PCI «RP-2.1» фирмы «Морские комплексы и системы» [18];
- радар-процессора Transas RIB6 фирмы «Транзас» [19];
- радар- процессора РП5 М Института точной механики и вычислительной техники им. С.А. Лебедева РАН [20].
Система управления полетами, заходом на посадку и посадкой вертолетов (фиг. 3) через группу устройств сопряжения 3 (фиг. 1) сопрягается (подключается входами/выходами) с информационно-управляющей системой судна (корабля, платформы), комплексом гидрометеорологического обеспечения, средствами связи и обмена данными, системой инерциальной навигации и стабилизации, системой приемо-индикаторов спутниковой навигационной системы, карт-сервером, гирокомпасом, лагом, электронной картографической навигационно-информационной системой (ЭКНИС) или системой счисления и прокладки, информационными средствами судна (корабля, платформы), видеокамерами, техническими средствами обеспечения полетов.
Примером информационно-управляющей системы может являться, например, информационно-управляющая система «Требование-М» [5].
В качестве комплекса гидрометеорологического обеспечения может использоваться, например:
- станция гидрометеорологическая корабельная «Характер-К» [21];
- станция гидрометеорологическая корабельная «Сюжет-КМ» [22];
- комплекс гидрометеообстановки «AWOS-MNS» [23].
Средства связи и обмена данными в общем случае включают [11]:
- автоматизированный комплекс обмена данными;
- средства телефонной связи;
- средства громкоговорящей судовой (корабельной) связи;
- средства радиосвязи.
В качестве автоматизированного комплекса обмена данными могут использоваться, например:
- автоматизированные комплексы обмена информацией «Трасса» в различных модификациях [6];
- аппаратура передачи данных «Link» различных модификаций [7].
В качестве средств радиосвязи могут использоваться, например:
- автоматизированный комплекс связи для авианесущих кораблей «Буран-Э» [8];
- автоматизированный комплекс связи для надводных кораблей «Буран-5КЭ» [8].
В качестве аппаратуры телефонной связи (внутренней связи и коммутации) и судовой (корабельной) громкоговорящей связи может быть использована любая выпускаемая аппаратура, например [9], или:
- аппаратура безбатарейной телефонной связи БТС-1006 производства ООО «НПК Морсвязьавтоматика» [25];
- аппаратура безбатарейной телефонной связи с режимом ГГС «Базис» [26];
- системы телефонной связи фирмы «Thales» серии STP9000: 9010, 9011, 9110, 9111 [27];
- система командной двухсторонней громкоговорящей связи AmplidanComander 1500 компании «Антарсат» [28];
- командная селекторная система CIS 3000 PHONTECH AS [29];
- судовая аппаратура связи и трансляции «Ока» [30];
- аппаратура внутрикорабельной безбатарейной телефонной связи [31];
- аппаратура циркулярной громкоговорящей связи [32];
- приборы безбатарейной внутрикорабельной связи [33].
В качестве системы инерциальной навигации и стабилизации в данном случае может использоваться инерциальная система любого типа, в частности, для кораблей и судов может использоваться инерциальная навигационная система «Ладога-М» и ее модификации (см., например, [10]).
В качестве системы приемоиндикаторов спутниковой навигационной системы может использоваться любая серийно выпускаемая система, например[11], или:
-GPS (DGPS, WAAS), ТИП GP-37, GP-32 фирмы FURUNO ELECTRIC CO., LTD;
- приемоиндикатор глобальной навигационной спутниковой системы(ГНСС) GPS, ТИП GP-33, GP-150 FURUNO ELECTRIC CO., LTD;
- судовой комбинированный приемоиндикатор глобальных навигационных - спутниковых систем GPS/ГЛОНАСС, тип "KGP-925", "SGN-500" фирмы SAMYUNG ELECTRONIC CO.,LTD (новое название: SAMYUNG ENC CO., LTD);
- судовой комбинированный приемоиндикатор глобальных навигационных - спутниковых систем ГЛОНАСС/GPS, тип "ВЕГА ВГ-16", ООО "НАУЧНО ПРОИЗВОДСТВЕННОЕ ПРЕДПРИЯТИЕ "МУРОМСКИЙ РАДИОПРИБОР";
- судовой комбинированный приемоиндикатор глобальных навигационных - спутниковых систем GPS/ГЛОНАСС, тип ФАРВАТЕР РК-2106, РК-2006 МК2,ООО "РАДИО КОМПЛЕКС";
- приемник дифференциальной подсистемы DGPS/ДГЛОНАСС, тип ПКИ-2, ЗАО "ТЕХНОМАРИН";
- судовой комбинированный приемоиндикатор глобальных навигационных - спутниковых систем GPS/ГЛОНАСС, тип "ТРАНЗАС Т701", ЗАО "ТРАНЗАС".
Картсервер может быть выполнен в виде стандартного компьютера любого типа, имеющего требуемый набор каналов ввода-вывода информации [1, 2, 3], с загруженным в него комплексом электронных навигационных карт требуемого района мирового океана.
В качестве гирокомпаса может использоваться любой серийно выпускаемый гирокомпас, например, гирокомпас Standard 22, NGSM Navigat X MK1, PGM-C-010, PGM-C-011, PGM-V-024, PGM-VS-025, TokyoKeiki TG-8500, гирокомпас Simbard GC80, гирокомпас Tokyo Keiki TG-8000, гирокомпасы серии Subsea Teledyne, NGSM Navigat X MK2, Yokogawa CMZ900[34].
В качестве лага может использоваться любой серийно выпускаемый лаг, например[13], или:
- лаг ИЭЛ-3 (ИЭЛ-2М2)[35];
- лаг CALYPSO[36];
- лаги JLN-205, JLN-550[37];
- лаг ЛЭМ2-2 ОАО"ЦНИИ "Электроприбор"[38];
- лаг ЛЭМ1-1М ОАО "ЦНИИ "Электроприбор" [39].
Информационные средства могут представлять собой радиолокационные или оптико-электронные системы любого типа, обеспечивающую обнаружение и сопровождение вертолетов, в частности могут использоваться существующие корабельные радиолокационные станции и комплексы [14]:
- корабельный многофункциональный радиоэлектронный комплекс «Позитив-МЭ» и его модификации;
- радиолокационная навигационная станция МР-212/201-1 и ее модификации;
- корабельная трехкоординатная радиолокационная станция «Фрегат-МА-Э» и ее модификации;
- судовые радиолокационные станции, например, типа МР-231 (производитель ОАО «Горизонт» г. Ростов-на-Дону).
В качестве видеокамер могут использоваться серийно выпускаемые видеокамеры, например, всепогодные (морские) камеры СОЕХ фирмы Synetics типа MECH/4 T2 PTZ, MECH/4 PTZ, C2000-S, C200-V, MEDC[40].
В качестве электронной картографической навигационно-информационной системы (ЭКНИС) или системы счисления и прокладки могут использоваться серийно выпускаемые электронные картографические навигационно-информационные системы, например, ЭКНИС МК-54ИС (производитель ОАО «Горизонт» г.Ростов-на-Дону -[41] или NavComVoyager (производитель - компания «НавМарин») [42]
В качестве технических средств обеспечения полетов может использоваться светосигнальный комплекс «Тюльпан-В», серийно выпускаемый по техническим условиям ИЖЦП 676.765.005 ТУ. Кроме того могут использоваться устройства, выполняемые в соответствии с техническими решениями по патентам №163059 от 10.07.2016, №2547157 от 10.04.2015, №122984 от 22.06.2012.
Работа аппаратных средств системы управления осуществляется в следующем порядке.
Работа автоматизированного рабочего места руководителя полетов (фиг. 2) осуществляется следующим образом. Главный управляющий компьютер 9 обеспечивает решение расчетных задач, результаты расчетов выдаются на отображение на устройство 10 отображения и ввода информации и вычислители 19 графических станций 8 (по локальной сети 17), которые обеспечивают формирование кадров изображения и их выдачу на мониторы 18, управление решением задач осуществляется РП с использованием устройства отображения и ввода информации 10, либо с использованием клавиатуры 13 и устройства управления курсором 14, коммутатор 12 обеспечивает подключение клавиатуры 13 и устройства управления курсором 14, к вычислителям 19 графических станций 8 и главному управляющему компьютеру 9. При подключении клавиатуры 13 и устройства управления курсором 14 к главному управляющему компьютеру 9 управление всем процессом работы АРМ осуществляется через главный управляющий компьютер 9, в который вводятся с указанных органов управления или с устройства отображения и ввода информации 10 команды и данные. При подключении клавиатуры 13 или устройства управления курсором 14 к одному из вычислителей 19, управление может осуществляться через соответствующий вычислитель, который транслирует вводимые оператором команды и данные в главный управляющий компьютер 9 по локальной сети 17. Основная сеть 6 (фиг. 1) подключается к главному управляющему компьютеру 9, видеосерверу 11, вычислителю 21 терминала 15 управления техническими средствами обеспечения полетов, вычислителю 23 терминала управления средствами связи. Сеть картографической информации 7 (фиг. 1, 2) подключается к вычислителям 19 графических станций 8, по данной сети в вычислители 19 поступают электронные навигационные карты, используемые для отображения на мониторах 18. Каналы видеоинформации от видеокамер подключаются к видеосерверу 11, который формирует кадры изображения и (по команде РП с заданной периодичностью)выдает видеокадры, сформированные по видеоинформации заданного РП источника, по каналу связи в вычислитель 19 графической станции 8 (фиг. 2), который обеспечивает их отображение на мониторе 18, выбранном для отображения тактической обстановки. Управление видеокамерами и видеосервером 12 осуществляется РП с использованием устройства отображения и ввода информации 10 через главный управляющий компьютер 9, либо с использованием клавиатуры 13 и/или устройства управления курсором 14, подключенных к вычислителям 19 графических станций 8, которые при этом транслируют команды управления в главный управляющий компьютер 9 по локальной сети 17, обеспечивающий их передачу на видеосервер 11 по основной сети 6. Необходимая руководителю полетов информация поступает от приборов системы по основной сети 6 в главный управляющий компьютер 9, где обрабатывается, а результаты обработки отображаются на устройстве отображения и ввода информации 10 и передаются по локальной сети 17 в вычислители 19 графических станций 8, обеспечивающие их отображение на мониторах 18.
Работа аппаратных средств системы управления полетами, заходом на посадку и посадкой вертолетов для оборудования стартовых командных пунктов надводных кораблей и диспетчерских пунктов, размещаемых на судах и морских платформах (фиг. 1) осуществляется следующим образом.
Вычислительные средства устройств сопряжения 3, центральные вычислители 2 и главный управляющий компьютер 9 (фиг. 2) АРМ РП 1 объединенные основной сетью 6 образуют распределенную вычислительную систему. Весь комплекс задач, решаемых системой, распределен между указанными вычислительными средствами. Центральные вычислители 2 обеспечивают хранение базы данных системы и выполнение вычислительных задач. Устройства сопряжения 3 обеспечивают:
- прием информации от всех сопрягаемых систем корабля (судна, платформы), ее преобразование к стандартному виду и передачу в базу данных системы на центральные вычислители, а также в АРМ РП 1 и другие приборы сопряжения 3 в соответствии с составом решаемых ими задач;
- решение вычислительных задач;
- передачу в сопрягаемые системы команд и данных (при необходимости).
АРМ РП 1 обеспечивает управление решением всех задач РП, а также отображение необходимой РП информации.
При этом система обеспечивает прием от сопрягаемых систем, обработку и отображение на мониторах 18 графических станций 8 АРМ 1:
- текущего времени и даты (от системы приемо-индикаторов спутниковой навигационной системы или информационно-управляющей системы);
- электронной навигационной карты (ЭНК) от картсервера;
- первичной (от источника по выбору РП) и вторичной информации о воздушной и надводной обстановке (от информационных средств);
- формуляров и трасс объектов (целей) от информационных средств;
- координат, курса, курсового угла и скорости движения корабля (судна) от системы инерциальной навигации и от системы приемо-индикаторов спутниковой навигационной системы;
- данных о качке корабля (судна, морской платформы) от системы инерциальной навигации;
- данных о гидрометеорологической обстановке в районе плавания корабля(судна) или районе местонахождения платформы (от комплекса гидрометеорологического обеспечения или информационно-управляющей системы);
- данных о воздушном потоке на взлетно-посадочной площадке (ВППл) корабля (судна, морской платформы) от комплекса гидрометеорологического обеспечения;
- данных о реперной точке (от информационно-управляющей системы или ручным вводом оператором);
- плановой таблицы полетов, информации о запасных аэродромах и ВППл (от информационно-управляющей системы или ручным вводом РП);
- информации о готовности вертолетов (от информационно-управляющей системы или ручным вводом РП);
- заданных маршрутов полета управляемых вертолетов и решаемой задаче (от информационно-управляющей системы или ручным вводом РП);
- информации о состоянии сопрягаемых систем, режимах их работы;
- результатов выполняемых расчетов.
Обмен информацией с сопрягаемыми комплексами и системами корабля (судна, платформы) в общем случае осуществляется в следующем порядке.
Вырабатываемые системой данные и команды, выдача которых необходима в сопрягаемые комплексы и системы (информационно-управляющую систему, автоматизированный комплекс связи, информационные средства, средства связи, технические средства обеспечения полетов) корабля (судна платформы) передаются по основной сети 6 в соответствующее устройство сопряжения 3 и выдаются в систему, которой они предназначены.
Сопрягаемые комплексы и системы формируют пакеты с данными, подлежащими выдаче в систему управления, и передают их в соответствии с заданным режимом обмена (циклически с заданной периодичностью, либо по факту появления новой информации) в устройства сопряжения 3. Устройства сопряжения 3 принимают переданные пакеты с данными, формируют из них формуляры данных во внутреннем формате системы и по сети 6 передают в центральные вычислители 2, которые обеспечивают их считывание, хранение и передачу абонентам сети по их запросу. При формировании формуляров данных по объектам производится пересчет их координат и параметров движения, а также ошибок в единую систему координат (в систему координат с центром в центре тяжести корабля или судна, либо в систему координат одного из источников)
Прием текущего времени (от системы приемо-индикаторов спутниковой навигационной системы или информационно-управляющей системы) осуществляется в следующем порядке. Принимаемые пакеты данных текущего времени выдаются в основную сеть и используются всеми вычислителями системы для синхронизации. При работе системы приемо-индикаторов спутниковой навигационной системы используются принимаемые от нее данные, а при их отсутствии - данные от информационно-управляющей системы).
Прием и обработка навигационной информации от корабельных (судовых) источников производится следующим образом. Система приемо-индикаторов спутниковой навигационной системы, система инерциальной навигации и стабилизации, ЭКНИС или система счисления и прокладки, гирокомпас, лаг выдают в соответствующее устройство сопряжения формируемую ими навигационную информацию (географические координаты и параметры движения корабля(судна), углы, скорости и ускорения качки). Устройство сопряжения формирует на их основе формуляр корабля (судна), включая в него данные о географических координатах, курсе, курсовом угле, скорости относительно грунта и воды, данные по качке, а также время их получения. При наличии соответствующих данных от нескольких источников в формуляр включаются данные от наиболее точного источника. Сформированный формуляр передается по основной сети 6 в соответствующий центральный вычислитель 2. Если данные от указанных систем поступают на различные устройства сопряжения 3, то они передают данные формуляры в один из центральных вычислителей 2, который при этом и вырабатывает формуляр корабля.
Обработка первичной информации производится следующим образом.
Радиолокационные средства выдают в режиме реального времени первичную радиолокационную информации (видеосигнал и сигналы синхронизации) в устройство сопряжения и обработки первичной информации 4. Устройство 4 преобразует поступающую видеоинформацию в кадры цифрового изображения и выдает их в вычислитель 19 графической станции 8 в составе АРМ, назначенной для отображения видеоинформации. Команда на выдачу кадров цифрового изображения по данным определенного источника выдается РП с использованием устройства отображения и ввода информации 10 (фиг. 2) или клавиатуры 13 или устройства управления курсором 14 (фиг. 2) в главный управляющий компьютер 9 АРМ (фиг. 2), который передает данную команду по основной сети 6 в устройство сопряжения и обработки первичной информации 4. Аналогичным образом производится работа с видеоинформацией от оптикоэлектронных средств. В том случае, когда радиолокационные и оптикоэлектронные средства выдают готовые кадры цифрового изображения, они принимаются устройством 4, которое хранит текущий кадр изображения и при наличии команды РП выдает его с периодом поступления в вычислитель 19 графической станции 8, назначенной для отображения видеоинформации.
Прием, обработка и отображение электронной навигационной карты осуществляются в следующем порядке.
После включения системы РПс использованием устройства отображения и ввода информации 10 назначает графическую станцию 8 для отображения обстановки. Данная команда поступает в главный управляющий компьютер 9, который по локальной сети 17 передает ее в вычислитель 19 соответствующей графической станции 8. Далее РПс использованием устройства управления курсором 14 и монитора 18 графической станции 8 задает требования к режиму отображения электронной навигационной карты (масштаб, палитра, перечень отображаемых объектов, способ отображения: в истинном или относительном движении, с ориентацией на сервер или по курсу корабля).Введенные данные передаются в вычислитель 19 данной графической станции 8, который их хранит и использует для формирования кадров изображения для монитора 18. Вычислитель 19 (фиг. 2) данной графической станции 8 считывает из соответствующего центрального вычислителя 2 (фиг. 1) географические координаты корабля (судна, платформы), через картографическую сеть 7 закачивает электронные навигационные карты соответствующего района из картсервера и обеспечивает их отображение в соответствии с заданными режимами и циклом обновления изображения. Установленные РП настройки сохраняются после выключения системы, при этом РП может не производить их при включении системы, если не требуется изменить режим отображения.
Общий порядок решения задач системой следующий. Решение задачи инициируется либо РП с использованием устройства отображения и ввода информации 10 или клавиатуры 13 или устройства управления курсором 14, либо самой системой при наступлении определенных условий, например, с заданным периодом. Весь комплекс задач, подлежащих решению, распределен между центральными вычислителями 2, устройствами сопряжения 3 и главным управляющим компьютером 9 АРМ 1.
При этом система обеспечивает автоматическое решение следующих задач:
- обработка и отождествление данных, поступающих от информационных средств, и формирование единой картины воздушной и надводной обстановки в зоне контроля (в автономном режиме работы);
- формирование рекомендаций по маневрированию корабля (судна) в интересах обеспечения безопасности выполнения взлетно-посадочных операций вертолета;
- назначение секторов взлета и посадки вертолетов;
- контроль выполнения полетного задания и обеспечение безопасности полетов вертолетов;
- прием (передача) управления вертолетом между РП и оператором управления вертолетом корабля (судна, платформы) или других кораблей (судов, платформ);
- привод вертолета в зону действия оптических средств обеспечения посадки корабля (судна, морской платформы);
- контроль положения вертолета относительно заданной траектории захода на посадку (глиссады);
- контроль выхода вертолета из зоны действия информационных средств корабля (судна, платформы);
контроль выхода вертолета из зоны действия средств связи и обмена данными корабля (судна, платформы).
Обработка и отождествление данных, поступающих от информационных средств, и формирование единой картины воздушной и надводной обстановки в зоне контроля (в автономном режиме работы) осуществляется следующим образом. Задача решается циклически с определенным периодом, определяемым в зависимости от типа объектов (воздушные или надводные). Принимаемые устройствами сопряжения 3 от информационных средств данные о координатах и параметрах движения объектов, а также их ошибках, и классификационные данные объектов (воздушная, надводная, тип объекта, признаки государственной принадлежности, номер маршрута, и т.д.) записываются в один из центральных вычислителей 2 или устройство сопряжения 3, выделенное для решения данной задачи. Задача отождествления обстановки решается отдельно для воздушных и надводных объектов и запускается циклически. Решение задачи осуществляется в назначенном для этого вычислителе (центральном вычислителе 2 или устройстве сопряжения 3 на фиг. 1). При запуске задачи происходит обращение к вычислителю 2 или устройству сопряжения 3, в котором хранятся все данные по объектам, принятые от информационных средств корабля. При решении задачи в устройстве сопряжения 3, принимающем данные от информационных средств, оно может использовать сформированные им формуляры объектов. Данные по каждому объекту пересчитываются на текущий момент времени, после чего производится последовательное отождествление данных от источников в соответствии с известными способами [43-45]. Сформированный массив отождествленных целей сравнивается с полученным на предыдущем цикле и его целям присваиваются номера в соответствии с ранее присвоенными номерами, а новым целям - очередные номера. При работе в централизованном режиме данные единой картины воздушной и надводной обстановки могут выдаваться информационно-управляющей системой, при этом в предлагаемой системе данная задача не выполняется.
Ввод плановой таблицы полетов может осуществляться оператором системы с использованием устройства отображения и ввода информации 10, либо одного из мониторов 18 графической станции 8 и органов управления (клавиатура 13, трекбол 14). Оператор открывает шаблон плановой таблицы полетов и вводит в него данные по времени выполнения различных работ (полеты, подготовка к полетам, ремонтные работы, техническое обслуживание, отдых экипажа). Кроме того при работе в централизованном режиме плановая таблица полетов может поступать в готовом виде из информационно-управляющей системы корабля (судна, платформы).
Функционирование системы при подготовке к взлету и непосредственно при взлете вертолета осуществляется следующим образом.
При подготовке к взлету вертолета, после включения системы на мониторах 18 графических станций 8АРМ 1 руководителю полетов представляются (см. фиг. 3):
- дата и текущее время;
- электронная навигационная карта (ЭНК) с наложенной на нее воздушной и надводной обстановкой в районе полетов, поступающей от информационных средств корабля (судна, платформы) или информационно-управляющей системы (при работе в централизованном режиме);
- географические координаты, курс и скорость движения корабля, поступающие от системы инерциальной навигации и стабилизации, лага, гирокомпаса, ЭКНИС, системы приемо-индикаторов спутниковой навигационной системы;
- информация о метеоусловиях в районе корабля от комплекса гидромеорологического обеспечения и от информационно-управляющей системы корабля о метеоусловиях в районе полетов;
- данные о качке корабля от системы инерциальной навигации и стабилизации;
- данные о воздушном потоке на ВППл от комплекса гидромеорологического обеспечения;
- видеоинформация об обстановке на ВППл от видеокамер;
- информация о состоянии взаимодействующих систем и комплексов корабля, принимаемая от данных систем отображаемая на мониторе 18 состояния систем графической станции 8, назначенной РП для отображения данной информации.
От информационно-управляющей системы корабля (судна, платформы) в систему управления полетами, заходом на посадку и посадкой вертолетов передается информация о:
- маршруте полета вертолета,
- рубежах приема-передачи управления,
- реперной точке,
- запретных (опасных) для полетов зонах,
- запасных взлетно-посадочных площадках (ВППл),
которая отображается в графическом виде на фоне ЭНК на мониторе 18 графической станции 8, назначенной оператором для отображения обстановки.
При работе в автономном режиме соответствующие данные могут вводиться оператором на АРМ 1 вручную с использованием органов управления АРМ: устройства отображения и ввода информации 10, клавиатуры 13, устройства управления курсором 14.
Используя устройство ввода информации 10, РП (диспетчер) может вызвать на отображение:
- инструкцию по производству полетов с корабля (судна, платформы) данного типа;
- инструкцию по приему и выпуску вертолета;
- руководство по летной эксплуатации взлетающего вертолета и другие руководящие документы.
При этом команда на отображение данного документа поступает в вычислитель 19 соответствующей графической станции 8 и главный управляющий компьютер 9, который считывает документ из соответствующего центрального вычислителя 3, в котором он хранится через основную сеть 6, и обеспечивает его передачу в вычислитель 19 соответствующей графической станции 19 по локальной сети 17 для его отображения на мониторе 18.
Перед взлетом вертолета РП, используя устройство отображения и ввода информации 10 (см. фиг. 2), устанавливает этап полета вертолета «Взлет». По этой команде система выполняет следующие действия:
- проверяет наличие выработанного признака готовность вертолета;
- проверяет возможность взлета вертолета по максимально допустимой взлетной массе вертолета, по условиям качки и результирующего воздушного потока на ВППл;
- рассчитывает рекомендуемые сектора взлета вертолета;
- рассчитывает рекомендуемое направление и рекомендуемый курс взлета вертолета;
- вырабатывает сигнал разрешения или запрета взлета вертолета.
Если условия взлета выполнены, система вырабатывает сигнал разрешения взлета вертолета.
Если выработан сигнал запрета взлета вертолета, то система вырабатывает рекомендации по изменению курса и скорости движения корабля (судна), необходимые для обеспечения условий взлета.
Если условия взлета не могут быть обеспечены, то система вырабатывает сигнал запрета взлета.
По результатам выполненных расчетов на мониторах 18 графических станций 8 и/или устройстве отображения и ввода информации 10 дополнительно представляются:
- вырабатываемый системой по данным системы инерциальной навигации и стабилизации и комплекса гидрометеорологического обеспечения сигнал разрешения или запрета взлета по условиям качки корабля и результирующего воздушного потока на ВППл;
- сигнал разрешения взлета по максимально допустимой взлетной массе вертолета;
- вырабатываемые системой рекомендации по направлению отхода вертолета от корабля (левый борт, правый борт).
Руководитель полетов, используя информацию, представляемую ему системой, оценивает воздушную и надводную обстановку и условия взлета, принимает решение на выпуск вертолета.
В момент отрыва вертолета от ВППл, используя устройство отображения и ввода информации 10 (см. фиг. 2), РП дает команду системе начать сопровождение вертолета.
По этой команде система формирует и выдает во взаимодействующие системы (непосредственно или через информационно-управляющую систему(фиг. 3) сообщения о взлете вертолета. При этом система производит расчеты:
- траектории выхода на заданный маршрут полета;
- данных для формуляра контроля полета;
- рекомендаций для выхода вертолета на маршрут полета в кратчайшее время.
На устройствах отображения информации появляются:
- видеоинформация о взлетающем вертолете от видеокамер;
- рассчитанная системой траектория выхода вертолета на заданный маршрут полета;
- формуляр контроля с данными о вертолете и рекомендациями для выхода на маршрут полета в кратчайшее время.
Используя представленную системой информацию, РП контролирует процессы:
- отрыва вертолета от ВППл;
- висения вертолета над ВППл;
- отхода вертолета от корабля (судна, платформы);
- разгона и набора безопасной высоты.
При наборе безопасной высоты контроль полета вертолета осуществляется по информации, получаемой системой от информационных средств корабля(судна, платформы).
Функционирование системы в процессе полета вертолета по маршруту осуществляется следующим образом.
При выходе вертолета на заданный маршрут полета РП, используя устройство отображения и ввода информации 10 (см. фиг. 2), устанавливает этап полета вертолета «Маршрут».
По этой команде система обеспечивает:
- представление РП информации об обстановке в ближней зоне по данным информационных средств и о маршруте движения своего корабля, принимаемого от ЭКНИС или информационно-управляющей системы;
- представление РП в графическом виде заданного маршрута полета, принятого от информационно-управляющей системы (фиг. 3) или введенного вручную;
- определение на текущий момент времени и представление РП в виде планового маркера формируемых системой координат расчетной точки, характеризующей местонахождение вертолета на заданном маршруте в соответствии с полетным заданием;
- расчет и представление РП значений контролируемых параметров (показателей) выполнения полетного задания по месту (координаты), времени и расходу топлива;
- выработку и представление РП сигналов о выходе контролируемых параметров за пределы допустимых значений;
- выработку и представление РП сигналов об опасном сближении управляемого вертолета с другими воздушными объектами и с запретными для полетов зонами;
- выработку и представление РП сигналов о выходе вертолета из радиолокационного поля (зоны освещения обстановки радиолокационными средствами) корабля (судна, платформы);
- выработку и представление РП сигналов о выходе вертолета из зоны действия средств обмена информацией (радиосвязи);
- выработку и представление РП сигнала о подходе вертолета к заданному рубежу передачи управления;
- выбор на заданном маршруте полета очередной точки, в которую необходимо выполнять полет в текущий момент времени, расчет и представление РП значений управляющих параметров для полета в эту точку.
Результаты решения отображаются на мониторе18 графической станции 8 АРМ 1 (см. фиг. 2) на фоне ЭНК и в формуляре контроля на устройстве отображения и ввода информации 10 (см. фиг. 2).
На данном этапе в формуляре контроля отображаются:
- бортовой номер вертолета;
- индекс (позывной) летчика;
- номер трассы полета вертолета (номер цели, присвоенный сопровождаемому вертолету источником информации);
- номер вертолета в системе государственного опознавания;
- этап полета вертолета (в виде специального символа).
- информация о наличии отклонений вертолета от заданной траектории полета по месту, времени и расходу топлива выше допустимых;
- информация о наличии опасных сближений вертолета с другими воздушными объектами;
- информация о наличии опасных сближений вертолета с запретными для полетов зонами;
- информация о поступлении аварийного донесения с борта вертолета;
- сигнал о выходе вертолета из радиолокационного поля (зоны освещения обстановки радиолокационными средствами) корабля (судна, платформы);
- сигнал о выходе вертолета из зоны действия средств обмена информацией;
- сигнал о подходе вертолета к рубежу передачи управления.
В зависимости от обстановки, уровня подготовки экипажа, от режима работы пилотажно-навигационного комплекса вертолета РП, используя систему, может реализовывать три способа управления полетом:
- «Полет в оперативно назначенную точку»;
- «Наведение»;
- «Полет по запрограммированному маршруту».
При реализации первой схемы для следования вертолета по заданному маршруту РП последовательно назначает экипажу точки, находящиеся на линии пути, которые должен пройти вертолет. При этом каждая следующая точка назначается после того, как будет пройдена вертолетом уже назначенная. Расчет точки производится системой по команде оператора, выдаваемой с использованием устройства отображения и ввода информации 10, либо с использованием монитора 18 соответствующей графической станции 8 и клавиатуры 13 или трекбола 14, а результат отображается на устройстве отображения и ввода информации 10 и/или на мониторе 18 соответствующей графической станции 8 АРМ 1. Полет в назначенную точку экипаж выполняет самостоятельно. РП осуществляет контроль.
При реализации способа управления «Наведение» для следования по заданной траектории экипаж также выполняет команды РП. РП эпизодически передает экипажу по радиоканалу заданные значения курса, скорости и высоты полета вертолета на текущий момент времени, которые формируются системой и отображаются на устройстве отображения и ввода информации 10 и/или на мониторе 18 соответствующей графической станции 8 АРМ 1.
При реализации способа «Полет по запрограммированному маршруту» экипаж самостоятельно выполняет полет по заданному маршруту. РП производит контроль полета. Полет осуществляется последовательным выводом вертолета в характерные точки маршрута (ППМ), запрограммированные в пилотажно-навигационный комплекс (ПНК) вертолета экипажем перед вылетом в соответствии с выданным полетным заданием.
Независимо от принятого способа управления полетом вертолета на маршруте РП, используя информацию, представляемую системой на данном этапе, осуществляет непрерывный контроль за:
- фактическим перемещением вертолета и других воздушных объектов, их взаимным положением по данным информационных средств или информационно-управляющей системы;
- выдерживанием заданной линии пути и намеченного профиля (режима) полета вертолета по месту, времени и расходу топлива;
- сближением вертолета с запретными (опасными) для полетов зонами;
- выходом вертолета из зоны действия информационных средств (см. фиг. 3) и из зоны действия средств связи и обмена данными (см. фиг. 3);
- обстановкой и метеоусловиями на маршруте полета.
Контроль всех указанных параметров осуществляется системой, которая в случае отклонений от требуемых значений параметров, плановых условий полета или опасного сближения вырабатывает предупреждающие сигналы РП и отображает соответствующую информацию на устройстве отображения и ввода информации 10 и/или мониторе 18 соответствующей графической станции 8 АРМ 1.
При выходе контролируемых параметров за пределы допустимых, а также при наличии опасных ситуаций соответствующие им символы в формуляре контроля изменяют цвет со «спокойного» на «тревожный».
При подходе вертолета к заданному рубежу передачи управления системой формируется соответствующий сигнал РП. В формуляре контроля символ признака о подходе вертолета к рубежу передачи управления изменяет цвет на активный. Это означает, что РП должен установить радиообмен с оператором, принимающим управление, и убедится, что оператор готов принять управление экипажем вертолета. Получив сообщение о готовности оператора принять управление, РП дает команду экипажу вертолета установить радиообмен с оператором, принимающим управление.
При получении по каналу связи средства связи от оператора, принимающего управление, квитанции «Управление принято» РП вводит в систему указание о снятии вертолета с сопровождения, например, активизируя в формуляре контроля кнопку с бортовым номером вертолета. По этой команде формуляр контроля полета вертолета изменяет цвет на не активный, что означает - вертолет снят с сопровождения. Вместе с тем, на устройствах отображения остаются все графические построения, которые относятся к этому вертолету. Это позволяет РП при необходимости оперативно взять управление экипажем вертолета на себя.
При возврате вертолета на корабль (судно, платформу), при поступлении от оператора, управляющего вертолетом, по средствам связи сообщения о подходе вертолета к рубежу приема/передачи управления РП принимает управление вертолетом на себя. Процедура приема управления экипажем вертолета от данного оператора, такая же, как описана выше при его передаче. Здесь РП выступает как лицо, принимающее управление, а оператор - передающее.
Приняв управление, РП, используя устройство отображения и ввода информации 10 АРМ (см. фиг. 2), устанавливает этап полета вертолета «Заход на посадку».
Функционирование системы при заходе вертолета на посадку и посадке осуществляется следующим образом.
РП, используя устройство отображения и ввода информации 10АРМ 1 (см. фиг. 2) устанавливает в системе режим работы этапа полета «Заход на посадку и посадка» и активирует формуляр контроля. По этой команде система рассчитывает траекторию захода на посадку и вырабатывает рекомендации для полета вертолета по этой траектории, которые отображаются в формуляре контроля на мониторе 18 соответствующей графической станции 8 АРМ 1 (см. фиг. 2)и/или на устройстве отображения и ввода информации 10 АРМ 1 (см. фиг. 2).
При выходе вертолета в точку начала глиссады системой формируются и на мониторе 18 соответствующей графической станции 8 АРМ 1 (см. фиг. 2) и/или на устройстве отображения и ввода информации 10 АРМ 1 (см. фиг. 2) дополнительно отображаются:
- сигнал разрешения (запрета) посадки по условиям качки корабля и результирующего воздушного потока на ВППл;
- видеоинформация от видеокамер о вертолете, заходящем на посадку;
- отклонения вертолета от глиссады посадки в вертикальной и горизонтальной плоскостях, рассчитанные системой.
При невозможности посадки вертолета по качке или результирующему воздушному потоку система выдает сигнал запрета посадки, производит расчеты и вырабатывает рекомендации по изменению курса корабля для обеспечения условий посадки.
Используя представленную системой информацию, РП имеет возможность контролировать процессы:
- выхода вертолета в точку начала глиссады;
- движения вертолета по глиссаде;
- висения вертолета над ВППл перед касанием ВППл,
а при необходимости в ограниченное время принять решение и четко отреагировать на любое изменение обстановки в воздухе и на ВППл.
В момент касания вертолетом ВППл, используя устройство отображения и ввода информации 10 АРМ 1, РП дает команду системе о снятии вертолета с сопровождения. По этой команде система формирует и выдает во взаимодействующие системы сообщения о посадке вертолета.
Управление техническими средствами обеспечения полетов производится следующим образом.
РП, используя устройство отображения и ввода информации 20 терминала 15 управления техническими средствами обеспечения полетов устанавливает режим управления: ручной или автоматический.
В ручном режиме управления РП в требуемые моменты времени, используя устройство отображения и ввода информации 20 терминала 15, выдает команду на включение соответствующих технических средств, которая поступает в вычислитель 21, формирующий пакет с командой на включение требуемого технического средства, выдаваемый в технические средства. Технические средства формируют пакет данных о своем состоянии и выдают его в вычислитель 21 терминала 15. Вычислитель формирует и отображает данные о состоянии технических средств на устройстве отображения и ввода информации 20.
При задании РП автоматического режима управления вычислитель 21 терминала 15 с заданным периодом считывает из соответствующего центрального вычислителя координаты вертолета, производящего посадку и при достижении им заданных дальностей до корабля (судна, платформы) формирует и выдает в технические средства обеспечения полетов команды на включение требуемого технического средства. Технические средства формируют пакет данных о своем состоянии и выдают его в вычислитель 21 терминала 15. Вычислитель формирует и отображает данные о состоянии технических средств на устройстве отображения и ввода информации 20. РП контролирует своевременное включение требуемых технических средств и при необходимости может выдать команду на их включение вручную в описанном выше порядке.
Использование средств связи РП производится в следующем порядке.
При необходимости использования какого-либо средства связи (радиосвязи, громкоговорящей связи, телефонной связи) РП с использованием устройства отображения и ввода информации 22 выбирает и включает соответствующее средство. Далее с использованием микрофона 25 и устройства воспроизведения звука 24 производит необходимые переговоры. По окончании с использованием устройства отображения и ввода информации 22 выключает соответствующее включенное средство.
Для использования средств автоматической передачи данных оператор с использованием устройства отображения и ввода информации 22 выбирает и включает соответствующее средство. После этого все команды и данные, формируемые системой и подлежащие передаче на управляемые вертолеты поступают по основной сети 6 в вычислитель 23, который формирует пакеты данных и выдает их в средства автоматической передачи данных. По окончании работы с использованием устройства отображения и ввода информации 22 РП выключает соответствующее включенное средство.
Управление вертолетом РП осуществляется с использованием средств автоматической передачи данных или/и средств голосовой радиосвязи.
При наличии на корабле (судне, платформе) и вертолете аппаратуры передачи данных все вырабатываемые системой команды по управлению вертолетом могут автоматически передаваться на вертолет с использование аппаратуры передачи данных в описанном выше порядке. Для этого РП должен установить соответствующих режим работы системы с использованием устройства отображения и ввода информации 10. При этом соответствующая команда разрешает передачу всех формируемых системой команд в вычислитель 23 терминала управления средствами связи. Поступившая команда отображается на устройстве отображения и ввода информации 20. РП с использованием устройства отображения и ввода информации 20 дает разрешение или запрещает передачу данной команды на вертолет. Кроме того для этого РП может использовать устройство отображения и ввода информации 10.
Основным режимом управления является режим управления РП вертолетом с использованием голосовой радиосвязи. При этом РП в описанном выше порядке включает голосовую радиосвязь и передает команды экипажу вертолета. Формирование команд производится системой в порядке, описанном выше для всех этапов ее работы: взлет, маршрут, посадка. Сформированные команды отображаются на устройстве отображения и ввода информации 10 АРМ 1 и мониторах 18 графических станций 8 АРМ 1.
Система обеспечивает документирование:
- команд и сигналов, формируемых РП и системой в процессе управления вертолетами;
- переговоров РП по внутрикорабельной (судовой) связи;
- переговоров РП внутри командно-диспетчерского пункта;
- радиообмена с экипажами вертолетов;
- параметров полета вертолетов;
- взаимного положения летательных аппаратов в воздушном пространстве;
- видеоинформации о взлете, заходе на посадку и посадке вертолетов.
Документирование производится следующим образом.
Все данные подразделяются на две группы. К первой относятся данные, обязательные для документирования, а ко второй - данные, документирование которых производится по решению РП. После включения системы РП устанавливает перечень данных второй группы, подлежащих документированию. При этом информация о необходимости их документирования выдается в программы, осуществляющие формирование соответствующих данных. Программа, осуществляющая формирование данных, подлежащих документированию, при их выработке автоматически направляет сформированный формуляр в базу данных соответствующего центрального вычислителя 2 или вычислитель средства документирования 5, где он хранится до очистки по команде РП.
Руководитель полетами имеет возможность произвести отбор необходимой задокументированной информации для вывода на отображение на мониторах 18 АРМ 1 в табличном виде или вывода не печать с использованием средств документирования информации 5, а также выполнить проигрывание задокументированной информации с ее отображением на индикаторах в реальном, замедленном, ускоренном или стартстопном режимах.
Таким образом система управления полетами, заходом на посадку и посадкой вертолетов обеспечивает:
- расширение функциональных возможностей;
- расширение круга решаемых задач;
- управление взлетом, полетом и посадкой вертолетов;
- автоматизацию процессов управления взлетом, полетом и посадкой вертолетов на судно, корабль или морскую платформу;
- повышение безопасности полетов и эффективности управления экипажами вертолетов при взлете, в ближней зоне полетов, при заходе на посадку и посадке на корабль, судно или морскую платформу, в том числе за счет автоматизации процессов управления взлетом и посадкой летательного аппарата на судно, корабль или морскую платформу;
- повышение эффективности процесса принятия решений руководителем полетов и качества вырабатываемых решений при управлении вертолетом за счет полноты информационного обеспечения и удобства восприятия информации, ее автоматизированной обработки и автоматической выработки рекомендаций для руководителя полетов.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Каталог продукции Fastwel - http://www.fastwel.ru/products/.
2. Каталог продукции Advantech - http://www.prosoft.ru/products/brands/advantech/
3. Каталог продукции Росавтоматика - http://www.rusavtomatika.com/panelnie-computery/ifc/?yclid=392235239565167787
4. Каталог гирокомпасов - http://cirspb.ru/equipment-and-service/navigation/gyro.
5. Морская радиоэлектроника: Справочник / И.В. Соловьев, Г.Н. Корольков, А.А, Бараненко и др., Под ред. В.А. Кравченко. - СПб.: Политехника, 2003. - с. 91-92;
Копанев А.А., Музыченко О.Н. Новый этап в развитии БИУС «Требование-М»// Морская радиоэлектроника, 2011, №2 (36). - С.17-23;
Боевая информационно-управляющая система «Сигма-Э» (см. Морская радиоэлектроника: Справочник / И.В. Соловьев, Г.Н. Корольков, А.А, Бараненко и др., Под ред. В.А. Кравченко. - СПб.: Политехника, 2003. - с. 88-90;
Н.Н. Батарин и др. Концепция построения переносного унифицированного АРМ/ Научно-технический журнал «Автоматизация процессов управления» №2 (8) 2006 г., С. 44-50;
Копанев А.А., Музыченко О.Н. Модернизированная боевая информационно-управляющая система «Требование-М» - система нового поколения // Сборник докладов научно-технической конференции «Состояние, проблемы и перспективы создания корабельных информационно-управляющих комплексов (эффективность, надежность, экономика)». - М: ОАО «Концерн «Моринформсистема-Агат», 2011. - С. 27-31.
6. Стратонов Л.В. Автоматизированные комплексы обмена информацией. Изделия ОКР «Трасса»/ Научно-технический журнал «Автоматизация процессов управления» №2 (8) 2006 г., С. 13-16
7. Быков И. Разработка АСУ и информационных технологий в ВМС США/ Зарубежное военноеобозрение, 2000 г., №12. Ежемесячный информационный бюллетень ВИНИТИ РАН №1/2000, Серия: "ТЕХНИЧЕСКИЕ СРЕДСТВА РАЗВЕДЫВАТЕЛЬНЫХ СЛУЖБ ЗАРУБЕЖНЫХ ГОСУДАРСТВ" Каналы передачи данных как важная составляющая успеха воздушных операций. http://militaryarticle.ru/zarubezhnoe-voennoe-obozrenie/2000-zvo?start=132
Dr. Kevin Buck: NATO Improved Link Eleven (NILE). ProgramLink 22 [Электронныйресурс].http://www.idlsoc.com/Documents/Symposiums/IDLS2005/IDLS2005_Tues_1330_Training_Stream_Kevin_Buck.pdf
8. Морская радиоэлектроника: Справочник / И.В. Соловьев, Г.Н. Корольков, А.А, Бараненко и др., Под ред. В.А. Кравченко. - СПб.: Политехника, 2003. - с. 113-119.
9. Морская радиоэлектроника: Справочник / И.В. Соловьев, Г.Н. Корольков, А.А, Бараненко и др., Под ред. В.А. Кравченко. - СПб.: Политехника, 2003. - с. 154-155.
10. Пешехонов В.Г., Шарыгин Б.Л., Миронов Ю.В. Единая система инерциальной навигации и стабилизации «Ладога-М» // Морская радиоэлектроника - 2003. - №1 (4). - С. 26-30.
11. Морская радиоэлектроника: Справочник / И.В. Соловьев, Г.Н. Корольков, А.А, Бараненко и др., Под ред. В.А. Кравченко. - СПб.: Политехника, 2003. - с. 112-154
12. Морская радиоэлектроника: Справочник / И.В. Соловьев, Г.Н. Корольков, А.А, Бараненко и др., Под ред. В.А. Кравченко. - СПб.: Политехника, 2003. - с. 213-214.
13. Морская радиоэлектроника: Справочник / И.В. Соловьев, Г.Н. Корольков, А.А, Бараненко и др., Под ред. В.А. Кравченко. - СПб.: Политехника, 2003. - с. 170.
14. Морская радиоэлектроника: Справочник / И.В. Соловьев, Г.Н. Корольков, А.А, Бараненко и др., Под ред. В.А. Кравченко. - СПб.: Политехника, 2003. - с. 29-32, 34-36, 39-41, 216-218
15. http://www.server2b.ru/katalog-hp/servery-hp/servery-hp-proliant-dl-rack-mount/
16. http://www.trinitygroup.ru/products/server/dell/
17.http://www.cisco.com/c/en/us/products/servers-unified-computing/ucs-c-series-rack-servers/index.html
18. ViewProducts
19. http://www.zora.ru/?a=show&id=137
20. http://www.ipmce.ru/custom/path3/
21. http//td-str.ru/file.aspx?id=4252
22. http//www.td-setcorp.ru/main/pressrelese.phtml?news_id=21002
23. http//www.mnsspb.ru/rasrab/rasrab_10.html.
25. http://unicont.com/marine_electronics/%D0%BF%D1%80%D0%BE%D0%B4%D1%83%D0%BA%D1%86%D0%B8%D1%8F/%D1%81%D0%B8%D1%81%D1%82%D0%B5%D0%BC%D1%8B/bts-1006.html
26. http://mnsspb.ru/produkciya/sistemy_vnutrisudovoyj_svyazi/apparatura_bezbatarejnoj_telefonnoj_svyazi_s_rezhimom_ggs_bazis/
27. http//marintechnologies.ru
28. http//www.antarsat.ru
29. http//www.flagmangrand.com.ua
30. http//www.corabel.ru/news/comments
31. http//www.electropribor.ru
32. http//commteh.ru
33. http//zavodkulakova.ru
34. http://cirspb.ru/equipment-and-service/navigation/gyro
35. http//zapadpribor.com
36. http//catalog.marinetec.com/katalog
37. http//www.jrc-russia.ru
38. http//www.arm-expo.ru
39. http//www.electropribor.spb.ru
40. www.ng-engineering
41. www.gorizontrostov.ru
42. www.navcom.ru
43. Музыченко О.Н., Савченко Д.И. «Квазиоптимальный алгоритм отождествления информации двух источников», Сборник тезисов докладов. XVI Макеевские чтения. Всероссийская научно-техническая конференция «Интегрированные многофункциональные системы управления для ВМФ» Направления совершенствования, новые технологии. - М.: ОАО «Концерн «Моринформсистема-Агат», 2010. С. 37-38
44. Музыченко О.Н., Савченко Д.И. «Использование теории графов для отождествления целевой информации». - «Состояние, проблемы и перспективы создания корабельных информационно-управляющих комплексов» // Сборник докладов научно-технической конференции. - ОАО «Концерн «Моринформсистема-Агат», 2009 г., Москва, Россия, С. 132-135).
45. Музыченко О.Н., Савченко Д.И. Способ определения относительных уходов навигационных систем подвижных носителей и система для его осуществления. Патент №2504733, МПК G01C 21/00.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система посадки летательного аппарата на корабль с применением цифровых технологий | 2020 |
|
RU2734173C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2019 |
|
RU2716886C1 |
| Способ обеспечения летчика визуальной информацией в условиях отсутствия видимости морской поверхности в ночное время | 2023 |
|
RU2822752C1 |
| КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ВЕРТОЛЕТА НА ОСНОВЕ ИНТЕГРИРОВАННОЙ МОДУЛЬНОЙ АВИОНИКИ | 2015 |
|
RU2605222C1 |
| СПОСОБ ОТОБРАЖЕНИЯ ИНФОРМАЦИИ О ВЕРТИКАЛЬНОМ ПЕРЕМЕЩЕНИИ КОРАБЕЛЬНОЙ ВЗЛЕТНО-ПОСАДОЧНОЙ ПЛОЩАДКИ ПРИ ПОСАДКЕ ВЕРТОЛЕТА НА КОРАБЛЬ | 2012 |
|
RU2506654C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОЙ ПОСАДКИ ВЕРТОЛЕТА В УСЛОВИЯХ ОТСУТСТВИЯ ИЛИ ОГРАНИЧЕННОЙ ВИДИМОСТИ | 2014 |
|
RU2561496C1 |
| КОМПЛЕКС ВЗЛЕТА, ПИЛОТИРОВАНИЯ И ПОСАДКИ АВТОМАТИЗИРОВАННЫХ ВОЗДУШНЫХ СУДОВ | 2006 |
|
RU2376203C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ БАЗИРОВАНИЯ, БОЕВОГО ПРИМЕНЕНИЯ И ТРАНСПОРТИРОВКИ ЦЕЛЕВОЙ ВОЕННОЙ ТЕХНИКИ ПРИ ИСПОЛЬЗОВАНИИ С КОРАБЛЕЙ (СУДОВ) | 2014 |
|
RU2605315C2 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТНЫМ ЭКСПЕРИМЕНТОМ | 2012 |
|
RU2477521C1 |
| Система"Автоматический световой указатель положения палубы при качке" | 2018 |
|
RU2695029C1 |
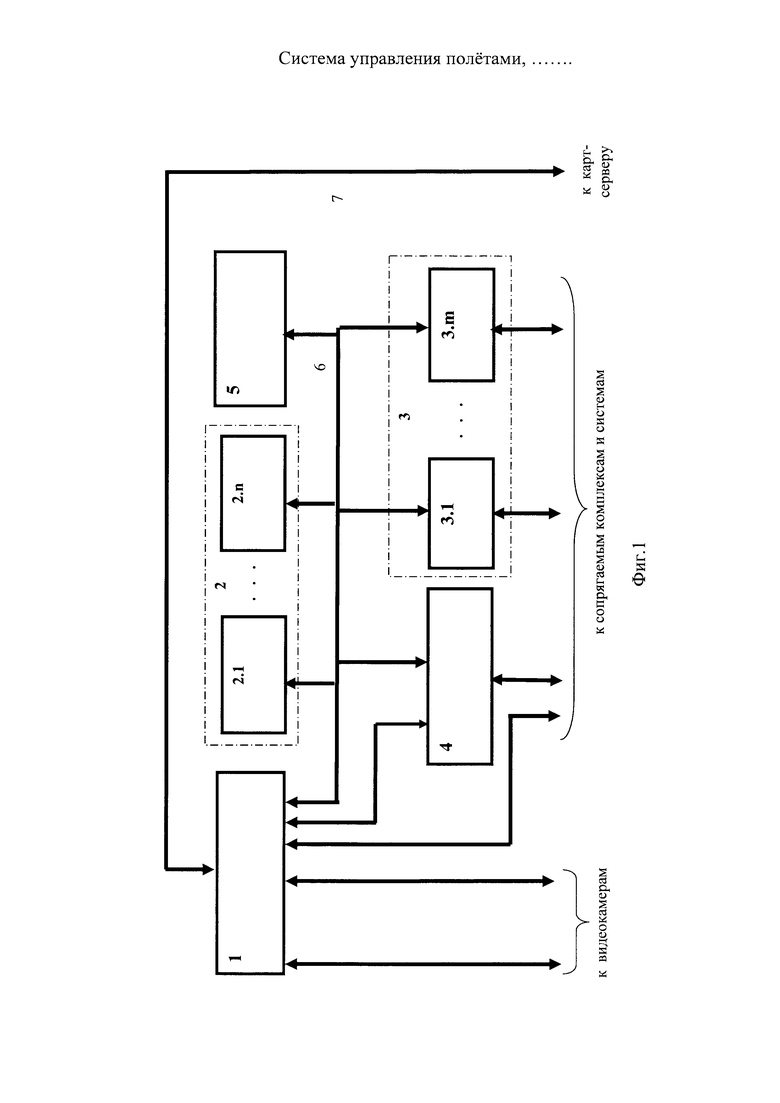
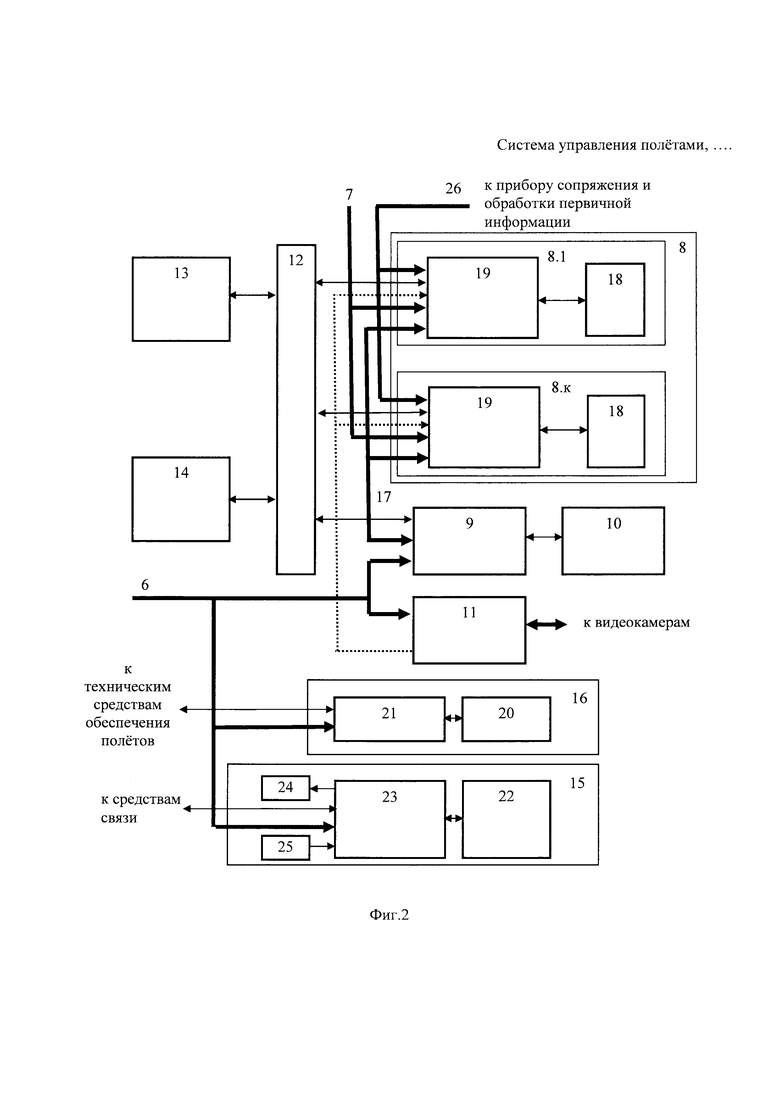
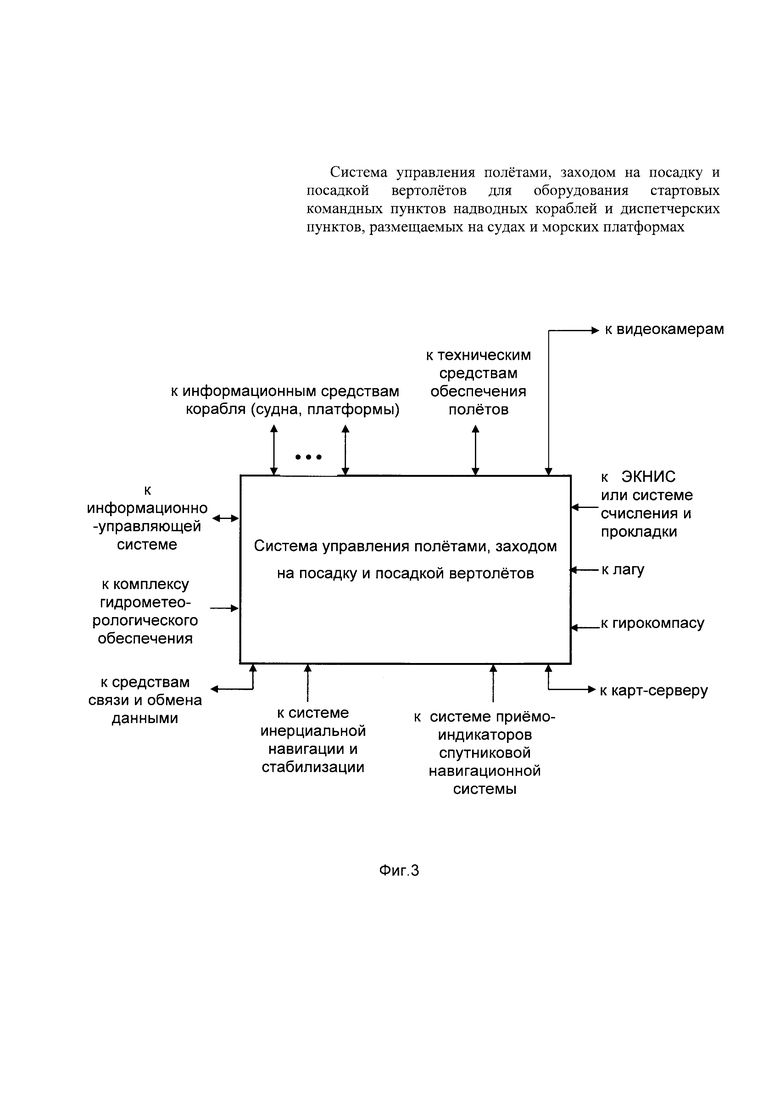
Система управления полетами, заходом на посадку и посадкой вертолетов содержит автоматизированное рабочее место руководителя полетов, устройства сопряжения по цифровым каналам, устройство сопряжения и обработки первичной информации, центральные вычислители, средства документирования информации, соединенные через основную сеть. Автоматизированное рабочее место руководителя полетов содержит графические станции, главный управляющий компьютер, видеосервер, устройство отображения и ввода информации, устройство управления курсором, клавиатуру, коммутатор, терминал управления техническими средствами обеспечения полетов, терминал управления средствами связи, соединенные определенным образом. Обеспечивается расширение функциональных возможностей системы управления полетами для взлета, управления полетом, посадкой вертолетов, не оснащенных средствами ближней навигации, автоматизация процессов управления, повышение эффективности принятия решений руководителем полетов, повышение безопасности полетов. 4 з.п. ф-лы, 3 ил. 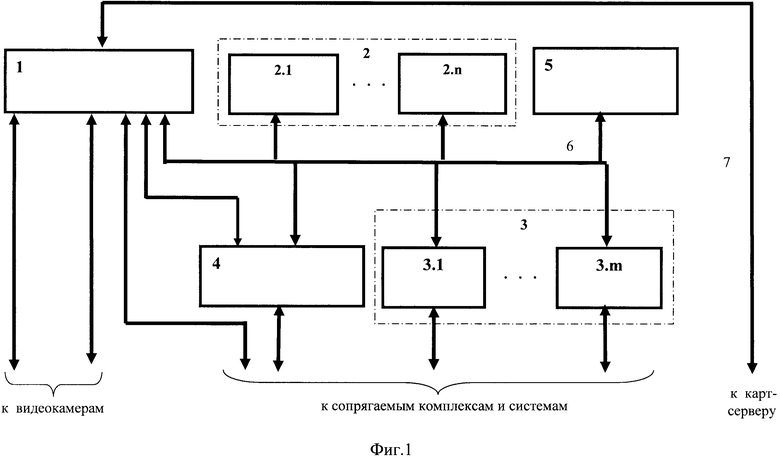
1. Система управления полётами, заходом на посадку и посадкой вертолётов, содержащая автоматизированное рабочее место руководителя полётов, вычислители и индикаторы, отличающаяся тем, что содержит устройства сопряжения по цифровым каналам, устройство сопряжения и обработки первичной информации, центральные вычислители и средства документирования информации, подключенные к основной сети, автоматизированное рабочее место руководителя полетов соединено входами/выходами с устройством сопряжения и обработки первичной информации и подключено к картографической сети и основной сети.
2. Система по п. 1, отличающаяся тем, что автоматизированное рабочее место руководителя полётов содержит не менее двух графических станций и главный управляющий компьютер, подключенные к локальной сети, видеосервер, соединенный выходом с входами графических станций, устройство отображения и ввода информации, соединенное входами/выходами с главным управляющим компьютером, устройство управления курсором и клавиатуру, соединенные входами/выходами с коммутатором, который соединен входами/выходами с графическими станциями и главным управляющим компьютером, терминал управления средствами связи и терминал управления техническими средствами обеспечения полётов подключены к основной сети, подключенной также к видеосерверу и главному управляющему компьютеру, графические станции подключены к сети картографической информации системы и прибору сопряжения и обработки первичной информации.
3. Система по п. 2, отличающаяся тем, что графическая станция содержит монитор, соединенный входами/выходами с вычислителем, входы/выходы которого являются входами/выходами графической станции.
4. Система по п. 2, отличающаяся тем, что терминал управления техническими средствами обеспечения полётов содержит устройство отображения и ввода информации, соединенное входами/выходами с вычислителем, входы/выходы которого являются входами/выходами терминала.
5. Система по п. 2, отличающаяся тем, что терминал управления средствами связи содержит устройство отображения и ввода информации, соединенное входами/выходами с вычислителем, соединенным входом с микрофоном, выходом – с входом устройства воспроизведения звука, а его входы/выходы являются входами/выходами терминала.
| US 20160155342 A1, 02.06.2016 | |||
| US 20170186329 A1, 29.06.2017 | |||
| US 20160049081 A1, 18.02.2016 | |||
| 0 |
|
SU100836A1 | |
| ВИРТУАЛЬНАЯ УПРАВЛЯЮЩАЯ СТАНЦИЯ | 2010 |
|
RU2619794C1 |

