Изобретение относится к сельскому хозяйству, в частности к мобильным сельскохозяйственным роботам для обработки рабочими растворами пестицидов в виде пены пропашных овощных и низкорастущих ягодных культур.
Известен способ внесения пестицидов, включающий применение рабочих растворов химических препаратов в виде пенных структур с заданным процентным соотношением пестицида в растворе пенообразующего вещества. Данный способ обеспечивает высокую степень густоты покрытия листьев растений, равномерное распределение рабочего раствора на обрабатываемой площади, эффективное действие химических средств защиты растений с уменьшением нормы внесения препарата, снижает воздействие внешних факторов на качество обработки, минимизирует вредное воздействие пестицидов на окружающую среду (патент KZ A4 26988, МПК А 01 С 23/00, 2013).
Известно устройство для внесения жидких средств химизации в слое пены, обеспечивающее реализацию способа внесения пестицидов в виде пенных структур, включающее резервуар для рабочего раствора, источник сжатого воздуха, технологическую трубопроводную, контрольно-измерительную и распределяющую арматуру, штангу, пеногенераторы с плоскофакельными распылителям (А.С. СССР № 1167676, МПК А 01 М 7/00, А 01 С 23/00, 1985)
Недостатком данного устройства является то, что оно не роботизировано и требует участие оператора – водителя в технологическом процессе внесения пестицидов, ручной настройки пеногенераторов на заданное положении и высоту для обработки растений, при этом в случае рядковой обработки сельскохозяйственных культур возможно неравномерное покрытие вегетативной части растений пенным слоем пестицида, что снижает качество и эффективность защиты овощных и низкорастущих ягодных культур от вредителей и болезней.
Известен самоходный робот-опрыскиватель для обработки растений земляники и других низкорастущих культур, включающий раму с управляемыми колесами, два из которых снабжены электромоторами привода колес, систему управления и навигации с контрольно-измерительными приборами, бортовым компьютером, приемник GPS/ГЛОНАСС, систему электропитания с источником в виде аккумуляторных батарей, систему опрыскивания, содержащую емкость для рабочего раствора, емкость для промывки, миксер для приготовления рабочего раствора, электронасос, блок распределительных клапанов, штангу, оснащенную, по крайней мере, четырьмя распыливающими узлами в виде защитных кожухов с автоматическими форсунками, датчиками высоты и наличия растений, электрическим цилиндром, обеспечивающим регулировку высоты положения штанги в зависимости от высоты обрабатываемых растений (патент RU 2592904, МПК А 01 С 23/00, 2016).
Недостатками данного опрыскивателя являются: риски загрязнения почвы инсектицидами и фунгицидами вследствие неизбежного попадания диспергируемых капель на почву, испарение капель рабочего раствора и, как следствие, загрязнение окружающей среды пестицидами, непроизводительные потери пестицида, ограниченный ресурс источников электропитания, что снижает производительность самоходного робота- опрыскивателя.
Технической задачей изобретения является создание мобильного робота-опрыскивателя для обработки пропашных овощных и низкорастущих ягодных культур рабочими растворами пестицидов в виде пенных структур, обеспечивающего повышение эффективности действия пестицидов, дифференцирование норм внесения рабочих растворов пестицидов в зависимости от фитосанитарного состояния растений, снижение норм внесения пестицидов, сведение к минимуму потерь пестицидов, уменьшение рисков загрязнения окружающей среды пестицидами, повышение производительности выполнения технологического процесса.
Поставленная техническая задача достигается тем, что у мобильного робот-опрыскивателя для обработки пестицидами пропашных овощных и низкорастущих ягодных культур, содержащего: самодвижущееся четырехколесное шасси в виде горизонтальной рамы с двумя направляющими передними и двумя ведущими задними колесами, заднюю и фронтальную вертикальные прямоугольные рамы с подвижными направляющими, заднюю и фронтальную горизонтальные штанги с механизмами подъема и опускания штанг, систему автономного электропитания в виде блока бортовых аккумуляторных батарей и панели солнечной батареи с множеством объединенных фотоэлементов, систему управления и навигации в виде бортового компьютера, модуля интегрированной навигационной системы, блок управления электроприводами шасси, систему технического зрения, включающую установленные на фронтальной штанге трехмерный сканирующий лазерный оптический дальномер и цифровые оптико-электронные датчики, систему пенообразования и внесения пестицидов, включающую блок автоматического управления подачей, расходом и распределением рабочих растворов пестицидов, ультразвуковые датчики, бак и миксер для рабочих растворов пестицидов, насосный агрегат, источник сжатого воздуха с пневматическим оборудованием, согласно изобретению панель солнечной батареи выполнена в виде половины поверхности сплюснутого сфероида вращения, одна из больших осей которого лежит в одной вертикальной плоскости с продольной осью симметрии робота-опрыскивателя, а малая ось совпадает с вертикальной осью, проходящей через центр масс робота–опрыскивателя, на которой, сверху панели, установлены антенна приемника спутниковой навигационной системы и снизу, под рамой - блок инерциальной навигационной системы, блок автоматического управления подачей, расходом и распределением рабочих растворов пестицидов и сжатого воздуха с одной стороны связан интерфейсом с центральным процессором бортового компьютера, с другой стороны - гидравлическими и пневматическими коммуникациями соединен с модулями пенообразования и внесения пестицидов, а каждый модуль пенообразования и внесения пестицидов снабжен, по крайней, мере тремя пеногенераторами, два из которых расположены горизонтально с общей горизонтальной осью симметрии и выходными отверстиями, направленными навстречу, друг другу, а один расположен вертикально с осью симметрии, перпендикулярной, горизонтальной оси, и выходным отверстием, направленным вниз, при этом каждый из модулей пенообразования и внесения пестицидов и каждый цифровой оптико-электронный датчик снабжены автономными приводными механизмами с электрошаговыми двигателями для поступательного перемещения модулей и датчиков вдоль горизонтальных штанг, а продольные оси симметрии цифровых оптико–электронных датчиков и продольные оси симметрии модулей пенообразования и внесения пестицидов постоянно находятся в одной вертикальной плоскости, перпендикулярной осям симметрии задней горизонтальной штанги и осям симметрии фронтальной горизонтальной штанги.
Изобретение поясняется чертежами.
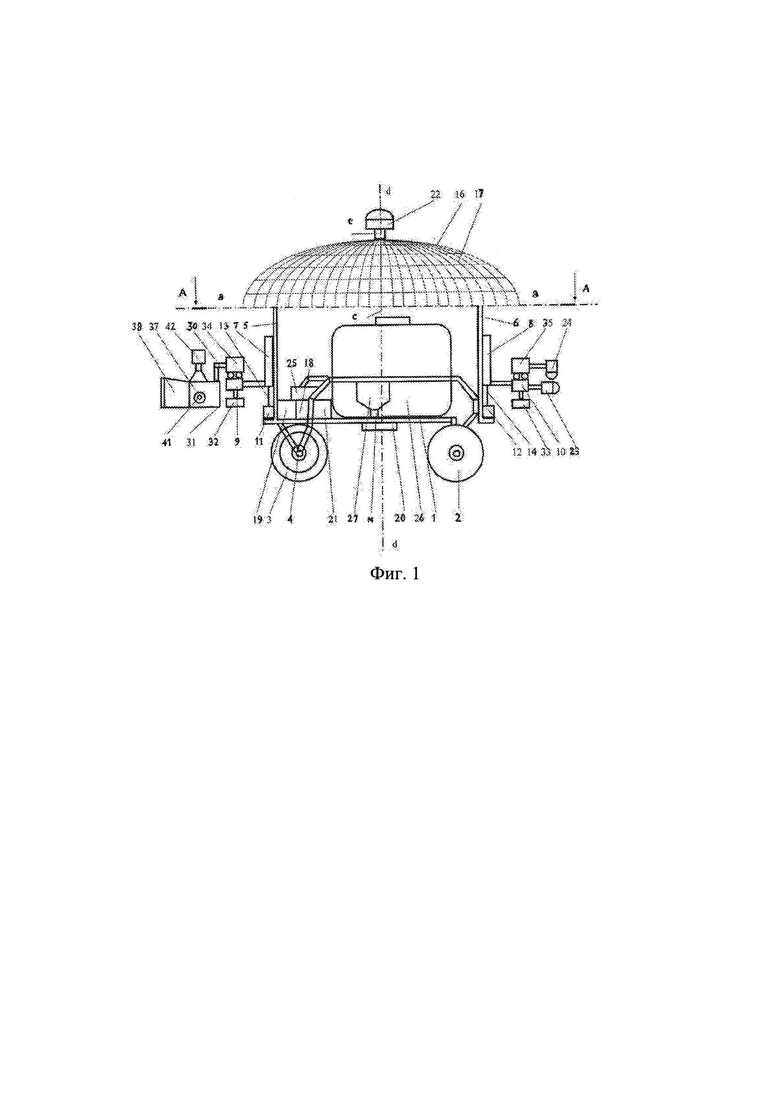
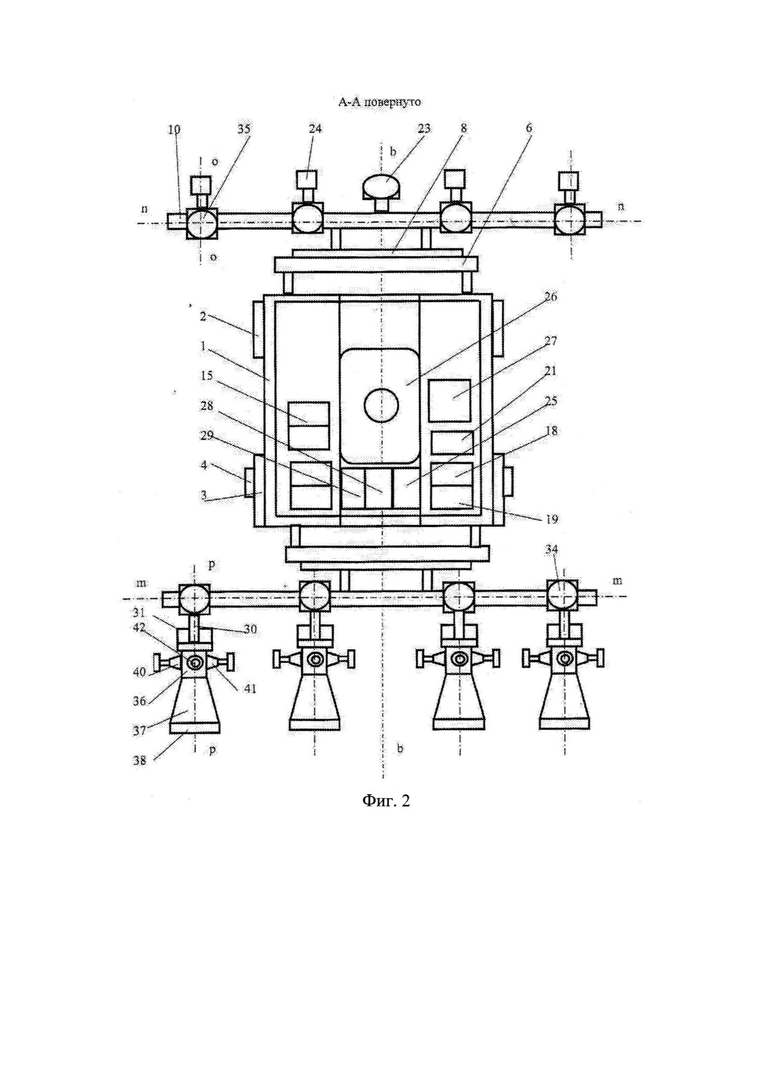
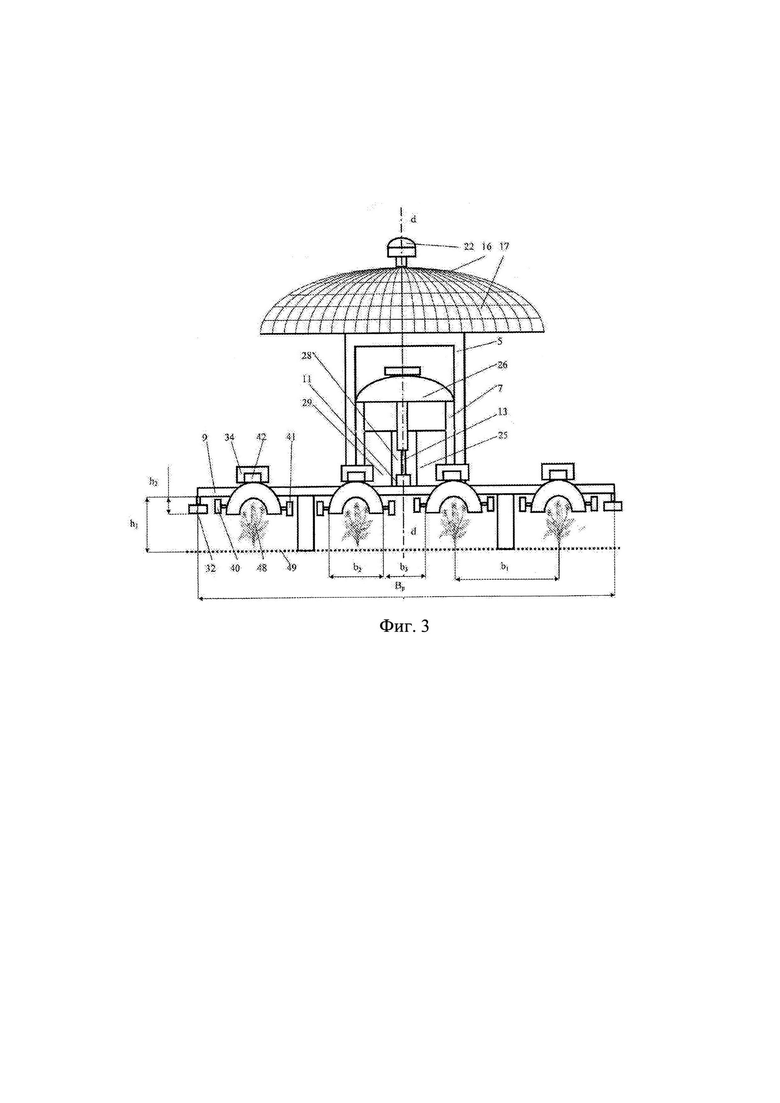
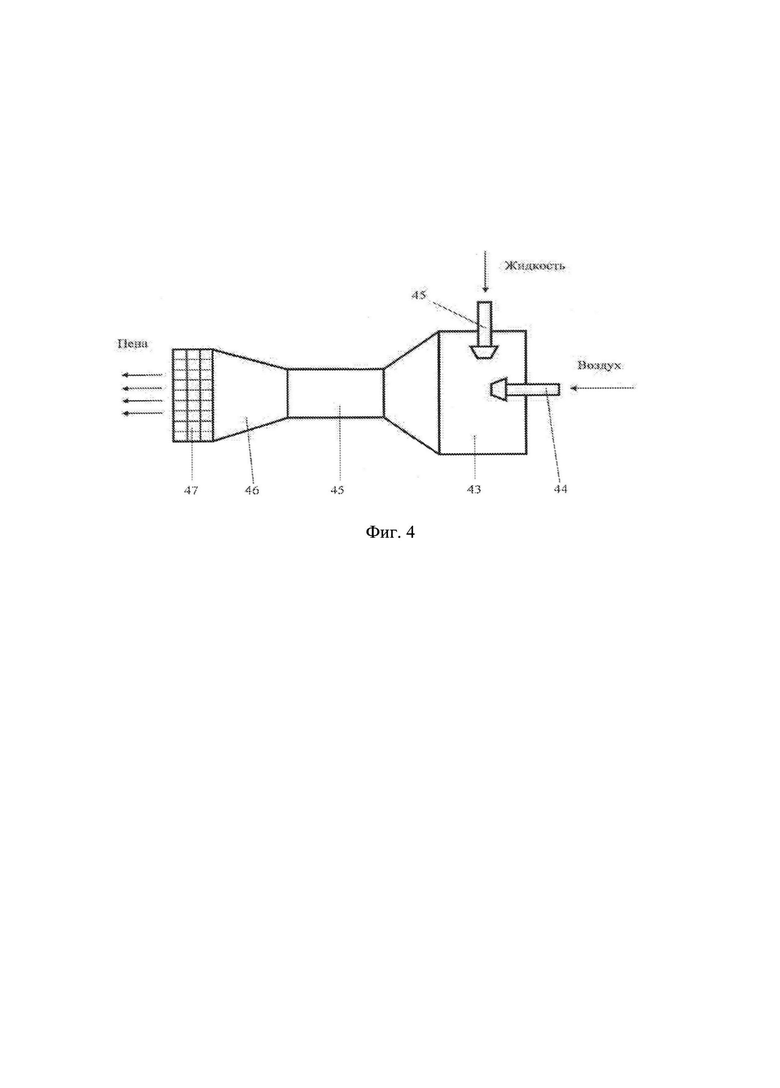
На фиг.1 показан вид сбоку мобильного робота-опрыскивателя; на фиг.2 то же вид сверху в разрезе А-А; на фиг. 3 то же вид сзади; на фиг. 4 схема пеногенератора.
Мобильный робот-опрыскиватель для обработки пестицидами пропашных овощных и низкорастущих ягодных культур содержит самодвижущееся четырехколесное шасси, систему автономного электропитания, систему управления и навигации, систему технического зрения, систему пенообразования и внесения пестицидов в виде пены.
Самодвижущееся четырехколесное шасси выполнено в виде горизонтальной прямоугольной рамы 1 с двумя передними направляющими колесами 2, двумя задними ведущими колесами 3 с приводными электромоторами 4, установленные на раме 1, заднюю 5 и фронтальную 6 прямоугольные рамы. Внутренние боковые стороны рам 5 и 6 снабжены вертикальными подвижными направляющими 7 и 8, к которым закреплены задняя горизонтальная штанга 9 и фронтальная горизонтальная штанга 10, имеющие механизмы подъема и опускания в виде электрических линейных актуаторов 11 и 12 с электрошаговым приводом, в которые интегрированы программируемые контролеры (не показано). Двигатели актуаторов 11 и 12 с одной стороны закреплены на нижнем брусе прямоугольных рам 5 и 6, с другой стороны подвижный шток 13 и 14 актуаторов 11 и 12 соединен с нижней поперечной рамой направляющих 7 и 8 соответственно.
Система автономного электропитания включает: установленный на раме 1 блок бортовых аккумуляторных батарей 15, закрепленную на вертикальных рамах 5 и 6 панель солнечной батареи 16 для преобразования солнечной энергии в постоянный электрический ток, выполненную в виде половины поверхности сплюснутого сфероида вращения с множеством объединенных фотоэлементов 17, при этом одна из больших осей a-a сфероида лежит в одной вертикальной плоскости с продольной осью симметрии b-b робота-опрыскивателя, а малая ось c-c совпадает с вертикальной осью d-d, проходящей через центр масс M робота-опрыскивателя. Форма панелей в виде половины поверхности сплюснутого сфероида вращения обусловлена более эффективным попаданием солнечного излучения на поверхность фотоэлементов 17, независимо от направления движения робота- опрыскивателя и естественного освещения времени суток. Посредством солнечной панели 16 происходит постоянная подзарядка блока аккумуляторных батарей 15, что увеличивает время автономной работы робота-опрыскивателя. Система автономного питания комплексирована с системой управления и навигации.
Система управления и навигации включает: модуль программного управления работой бортового оборудования и программного движением робота-опрыскивателя по заданной траектории, содержащий бортовой высокопроизводительный компьютер 18 и связанный с ним блок управления 19 электроприводами шасси, модуль интегрированной навигационной системы для определения координат и направления движения, состоящий из закрепленного под рамой 1 на вертикальной оси d-d, ближе к центру масс M блока инерциальной навигационной системы 20 в виде цифровых инерциальных датчиков (гироскопов, акселерометров), объединенного с блоком спутниковой навигационной системы в виде приемника ГЛОНАСС/GPS 21 с антенной 22 с круговой поляризацией сигнала, установленной сверху панели солнечной батареи 16 на оси d-d. Установка антенны 22 сверху панели солнечной батареи 16 на оси d-d обеспечивает максимальный обзор верхней полусферы небосвода. Установка блока инерциальной навигационной системы 20 под рамой 1 ближе к центру масс M робота-опрыскивателя является оптимальным, вследствие минимизации погрешностей определения ускорений и угловых скоростей робота-опрыскивателя.
Система технического зрения включает трехмерный сканирующий лазерный оптический дальномер 23 в виде лазерного передатчика и электрооптического приемника для пространственной ориентации робота-опрыскивателя, комплексированный с модулем интегрированной навигационной системы, цифровые оптико-электронные датчики 24 для определения степени засоренности сорными растениями, поражения растений вредителями и болезнями в режиме реального времени и передачей полученных данных в бортовой компьютер 18, который по полученным данным по заданной программе рассчитывает норму внесения рабочего раствора и передает управляющий сигнал системе пенообразования и внесения пестицидов.
Система пенообразования и внесения пестицидов включает: установленные на раме 1 блок 25 автоматического управления подачей, расходом и распределением рабочей жидкости и сжатого воздуха в виде цифрового регулирующего, дозирующего и распределяющего гидравлического и пневматического оборудования (не показано), бак 26 для рабочих растворов пестицидов, миксер 27 для приготовления рабочих растворов пестицидов, насосный агрегат 28, источник сжатого воздуха с пневматическим оборудованием 29, установленные на штанге 9 посредством кронштейнов 30 модули пенообразования и внесения пестицидов 31, ультразвуковые датчики 32, 33 для измерения высоты h1 расположения штанги 9 над поверхностью почвы и высоты h2 положения штанги 10 над обрабатываемыми растениями.
При этом каждый из модулей пенообразования и внесения пестицидов 31 и каждый цифровой оптико-электронный датчик 24 снабжены автономными приводными механизмами 34 и 35 с электрошаговыми двигателями для поступательного перемещения модулей 31 и датчиков 24 вдоль штанг 9 и 10 соответственно.
Продольные оси симметрии o-o цифровых оптико–электронных датчиков 24 и продольные оси симметрии p-p модулей пенообразования и внесения пестицидов 31 постоянно находятся в одной вертикальной плоскости, перпендикулярной осям симметрии m-m задней горизонтальной штанги 9 и осям симметрии n-n фронтальной горизонтальной штанги 10. Такое взаимное расположение цифровых оптико–электронных датчиков 24 и модулей пенообразования и внесения пестицидов 31 позволяет обеспечивать точную дифференцированную обработку растений в рядке в соответствии со сканированной информацией о поражении растений в каждом из рядков растений или засорении сорными растениями.
Каждый из модулей пенообразования и внесения пестицидов 31 включает кожух в виде половины поверхности кругового цилиндра 36, переходящего в поверхность половины усеченного конуса 37 с полукольцевым буртиком 38 на конце, установленные на цилиндрической части 36 кожуха 31 по дуге, по крайней мере, три пеногенератора, два горизонтально расположенных 40, 41, имеющих одну общую горизонтальную ось симметрии n-n с выходными отверстиями, направленными навстречу друг другу и вертикальный 42 с осью симметрии, перпендикулярной горизонтальной оси n-n выходным отверстием направленным вниз.
Пеногенераторы 40, 41, 42 служат для получения воздушно-механической пены из рабочего раствора пестицидов при добавления в него поверхностно-активного вещества. Каждый из пеногенераторов 40, 41, 42 состоит из приемной камеры 43 с соплом 44 для распыления сжатого воздуха и соплом 45 для подачи рабочего раствора. Приемная камера 43 переходит в конфузор, соединяемый с камерой смешения 45. К выходной части камеры смешения 45 крепится диффузор 46, на выходе которого установлен пакет сеток 47.
Такая конструкция модулей пенообразования и внесения пестицидов 31 обеспечивает высокую степень густоты покрытия обрабатываемых культур в рядке рабочим раствором пестицида в виде пены, вследствие обработки пеной вегетативной части растений как сверху, так и сбоку, обеспечивает равномерное распределение пены как по высоте, так и по ширине в каждом рядке растений, ликвидирует испарение и снос пестицидов за пределы зоны обработки при воздействии внешних факторов, таких как температура окружающего воздуха, ветер и уменьшает до предельно допустимых концентраций вредное воздействие пестицидов на окружающую среду.
Блок 25 автоматического управления подачей, расходом и распределением рабочей жидкости и сжатого воздуха с одной стороны связан интерфейсом с центральным процессором бортового компьютера 18, с другой стороны - гидравлическими и пневматическими коммуникациями соединен с модулями пенообразования и внесения пестицидов 31 (не показано). Изменение расхода рабочего раствора и соответственно нормы внесения обеспечивается цифровым регулирующим, дозирующим и распределяющим гидравлическим и пневматическим оборудованием.
Мобильный робот-опрыскиватель для обработки пропашных овощных и низкорастущих ягодных культур рабочими растворами пестицидов в режиме реального времени работает следующим образом.
Перед началом работы в бортовой компьютер 18 вводится электронная карта – задание на проведение технологического процесса, в которой указываются границы, площадь сельскохозяйственного поля, длина гона, ширина разворотной полосы, количество проходов по полю, схема обработки поля - траектория движения робота-опрыскивателя с учетом поворотов и заходов на следующий гон, координаты реперной точки начала и конца обработки участка, координаты точек разворота на другой гон, координаты места заправки рабочим раствором, рабочая скорость движения, ширина междурядья b1, ширина рядков растений b2, ширина полос, свободная от культурных растений b3, рабочая ширина захвата Вр, высота обрабатываемой культуры в рядках, высота положения штанги 9 и 10 над обрабатываемыми рядами растений, пределы норм внесения рабочего раствора инсектицида или фунгицида в зависимости от вида вредителей и болезней с учетом экономического порога вредоносности.
В бак 26 заливается техническая вода, в миксер 27 загружается инсектицид или фунгицид в соответствии с картой-заданием и заполняется до нужного объема водой. Рабочий раствор перемешивается и закачивается в бак 26.
Включается в работу система автономного электропитания, посредством солнечной панели 16 происходит подзарядка аккумуляторных батарей 15, от которых электропитание подается к системе управления и навигации, системе технического зрения, системе пенообразования и внесения пестицидов.
Включается система управления и навигации, система технического зрения.
В соответствии с электронной картой-заданием обрабатываемого участка и по данным координат, получаемых от GPS/ГЛОНАСС приемника 21, робот-опрыскиватель устанавливается на исходную реперную точку начала обработки - линию первого прохода. Включается система технического зрения, определяется расстояние b1 между двумя соседними рядами растений, ширина рядка b2, ширина полос, свободная от культурных растений b3, рабочая ширина захвата Вр.
Посредством ультразвуковых датчиков 32 и 33 измеряются высоты h1 и h2 положения штанг 9 и 10 относительно вегетативной части растений 48 и поверхности почвы 49, данные от датчиков 32 передаются в бортовой компьютер 18.
Компьютер 18 дает сигнал на электрошаговые приводы линейных актуаторов 11 и 12, посредством которых происходит автоматическая установка штанг 9 и 10 на заданные высоты h1 и h2 и, соответственно, происходит подстройка блоков 31 пенообразования и внесения пестицидов под среднюю высоту растений 48 в обрабатываемых рядках, а также сигнал на электрошаговые двигатели механизмов 34 и 35, посредством которых модули 31 и датчики 24 перемещаются вдоль штанг 9 и 10 и устанавливаются в заданное положение соответствующее параметрам b1, b2, b3 в реальном масштабе времени.
По сигналу от компьютера 18 через блок управления электроприводом шасси включаются приводные электромоторы 4. Робот-опрыскиватель начинает движение по запрограммированной траектории. Интегрированная навигационная система посредством приемника GPS/ГЛОНАСС 21 принимает сигналы от глобальной спутниковой навигационной системы, вычисляет координаты местоположения робота-опрыскивателя в каждый данный момент времени, с помощью блока инерциальной навигационной системы 20 регистрирует и обрабатывает текущие значения линейных и угловых ускорений, передает комплексную информацию в бортовой компьютер 18 о позиционировании и динамике движения робота – опрыскивателя. Функцию управления автономным движением робота-опрыскивателя по заданной траектории в реальном масштабе времени выполняет бортовой компьютер 18. Посредством сканирующего лазерного оптического дальномера 23 осуществляется наблюдение за пространством и обнаружение незапрограммированных препятствий перед роботом-опрыскивателем.
Бортовой компьютер 18 посредством программного обеспечения обрабатывает поступившую информацию и передает алгоритм управления в блок 25 автоматического управления подачей, расходом и распределением рабочей жидкости и сжатого воздуха.
Включается в работу система пенообразования и внесения пестицидов. Из бака 26 рабочий раствор инсектицида или фунгицида насосным агрегатом 28 подается в блок 25 автоматического управления подачей, расходом и распределением рабочей жидкости и сжатого воздуха; от источника сжатого воздуха 29 в блок 25 подается сжатый воздух. В блоке 25 по сигналу от компьютера 18 посредством цифрового регулирующего, дозирующего и распределяющего гидравлического и пневматического оборудования (не показано) происходит отмеривание, распределение и подача заданного количества рабочего раствора и сжатого воздуха к пеногенераторам 40, 41, 42. Поступающий в сопло 45 рабочий раствор инжектируется потоком сжатого воздуха, выходящего из сопла 44, и направляется в конфузор и далее в камеру смешения 45, где происходит смешивание воздуха и рабочего раствора. Образованная смесь заполняет диффузор 46 и орошает поверхность пакета сеток 47 с образованием пены, насыщенной инсектицидом или фунгицидом. Пена, выходящая из вертикальных пеногенераторов 42, покрывает верхнюю вегетативную часть растений 48. Горизонтальные пеногенераторы 40,41 обрабатывают боковые стороны растений 48. Кожухи в виде половины поверхности кругового цилиндра 36, переходящего в поверхность половины усеченного конуса 37 с полукольцевым буртиком 38 на конце формируют в процессе движения робота-опрыскивателя ровный полукруглый валик пены, полностью покрывающего вегетативную часть растений 48 с равномерным распределением действующего вещества инсектицида или фунгицида на абаксиальной и адаксиальной сторонах листьев растений. Каждый из датчиков 24 определяют степень поражения растений 48 вредителями или болезнями в каждом ряду.
Программное обеспечение, установленное на компьютере 18, позволяет в режиме реального времени анализировать данные с каждого датчика 24 с учетом экономического порога вредоносности и рассчитывать норму внесения с передачей сигнала на блок управления 25. Блок управления 25 регулирует расход рабочего раствора и потока сжатого воздуха, поступающих к пеногенераторам 40, 41, 42 модулей 31, и, как следствие, норму внесения, при этом в каждом из рядов растений может осуществляться обработка, как с переменными нормами, так и с постоянными нормами в зависимости от степени пораженности растений вредителями и болезнями.
Для обработки гербицидами бак 26 заправляется рабочим раствором гербицида. Обработке гербицидами подвергаются полосы ширины b3, свободные от культурных растений, но засоренные сорными растениями. Компьютер 18 робота-опрыскивателя дает сигнал на электрошаговые двигатели приводов механизмов 34 и 35 модулей 31 и датчиков 24, которые перемещаются вдоль штанг 9 и 10 соответственно и устанавливаются по оси симметрии полос b3. Далее технологический процесс внесения гербицидов аналогичен технологическому процессу внесения инсектицидов и фунгицидов.
Применение мобильного робота-опрыскивателя для обработки пропашных овощных и низкорастущих ягодных культур рабочими растворами пестицидов в виде пенных структур обеспечит повышение эффективности действия пестицидов, дифференцирование норм внесения рабочих растворов пестицидов в зависимости от фитосанитарного состояния растений и их снижение, сведение к минимуму потерь пестицидов, уменьшение рисков загрязнения окружающей среды пестицидами до предельно допустимых концентраций, повышение производительности выполнения технологического процесса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Мобильный робот-опрыскиватель плодовых деревьев и кустарников | 2022 |
|
RU2794786C1 |
| Мобильный робот для побелки стволов деревьев | 2022 |
|
RU2795158C1 |
| Робот-опрыскиватель для садоводства | 2022 |
|
RU2790688C1 |
| Мобильный робот для контактного нанесения пестицидов | 2023 |
|
RU2797047C1 |
| Беспилотный авиационный робототехнический комплекс для внесения пестицидов | 2022 |
|
RU2779780C1 |
| Селекционный мотоблок-опрыскиватель | 2017 |
|
RU2644196C1 |
| Машина для дифференцированного внесения пестицидов, жидких минеральных удобрений и других агрохимикатов | 2020 |
|
RU2748996C1 |
| Беспилотный вертолет для внесения пестицидов, удобрений и других агрохимикатов в точном земледелии | 2021 |
|
RU2754790C1 |
| Беспилотный привязной авиационный комплекс для внесения пестицидов и агрохимикатов в точном земледелии | 2020 |
|
RU2769411C1 |
| Беспилотный летательный аппарат для внесения пестицидов в промышленном садоводстве и питомниководстве | 2023 |
|
RU2811604C1 |
Изобретение относится к сельскому хозяйству. Мобильный робот-опрыскиватель для обработки пестицидами пропашных овощных и низкорастущих ягодных культур содержит самодвижущееся четырехколесное шасси в виде горизонтальной рамы (1) с двумя направляющими передними (2) и двумя ведущими задними (3) колесами, заднюю (5) и фронтальную (6) вертикальные прямоугольные рамы с подвижными направляющими (7 и 8), заднюю (9) и фронтальную (10) горизонтальные штанги с механизмами (11 и 12) подъема и опускания штанг (9 и 10), систему автономного электропитания в виде блока бортовых аккумуляторных батарей и панель солнечной батареи (16) с множеством объединенных фотоэлементов (17), систему управления и навигации в виде бортового компьютера (18), модуля интегрированной навигационной системы (20), блок управления электроприводами шасси (4), систему технического зрения, включающую установленные на фронтальной штанге (10) трехмерный сканирующий лазерный оптический дальномер (23) и цифровые оптико-электронные датчики (24), систему пенообразования и внесения пестицидов, включающую блок (25) автоматического управления подачей, расходом и распределением рабочих растворов пестицидов и сжатого воздуха, ультразвуковые датчики (32 и 33), бак (26) и миксер (27) для рабочих растворов пестицидов, насосный агрегат, источник сжатого воздуха с пневматическим оборудованием, модули (31) пенообразования и внесения пестицидов. Панель солнечной батареи (16) выполнена в виде половины поверхности сплюснутого сфероида вращения, одна из больших осей которого лежит в одной вертикальной плоскости с продольной осью симметрии робота-опрыскивателя, а малая ось совпадает с вертикальной осью, проходящей через центр масс (М) робота–опрыскивателя. Сверху панели (16) установлены антенна (22) приемника спутниковой навигационной системы. Снизу под рамой (1) установлен блок (20) инерциальной навигационной системы. Блок (25) автоматического управления подачей, расходом и распределением рабочих растворов пестицидов и сжатого воздуха с одной стороны связан интерфейсом с центральным процессором бортового компьютера (18), с другой стороны - гидравлическими и пневматическими коммуникациями соединен с модулями (31) пенообразования и внесения пестицидов. Каждый модуль (31) пенообразования и внесения пестицидов снабжен, по крайней мере, тремя пеногенераторами, два (40 и 41) из которых расположены горизонтально с общей горизонтальной осью симметрии и выходными отверстиями, направленными навстречу друг другу, а один (42) расположен вертикально, с осью симметрии, перпендикулярной горизонтальной оси, и выходным отверстием, направленным вниз. Каждый из модулей (31) пенообразования и внесения пестицидов и каждый цифровой оптико-электронный датчик (24) снабжены автономными приводными механизмами (34 и 35) с электрошаговыми двигателями для поступательного перемещения модулей (31) и датчиков (24) вдоль горизонтальных штанг (9 и 10). Продольные оси симметрии цифровых оптико–электронных датчиков (24) и продольные оси симметрии модулей (31) пенообразования и внесения пестицидов постоянно находятся в одной вертикальной плоскости, перпендикулярной осям симметрии задней горизонтальной штанги (9) и осям симметрии фронтальной горизонтальной штанги (10). Обеспечивается повышение эффективности действия в зависимости от фитосанитарного состояний растений, снижение норм внесения пестицидов, сведение к минимуму потерь пестицидов, уменьшение рисков загрязнения окружающей среды пестицидами, повышение производительности выполнения технологического процесса. 4 ил.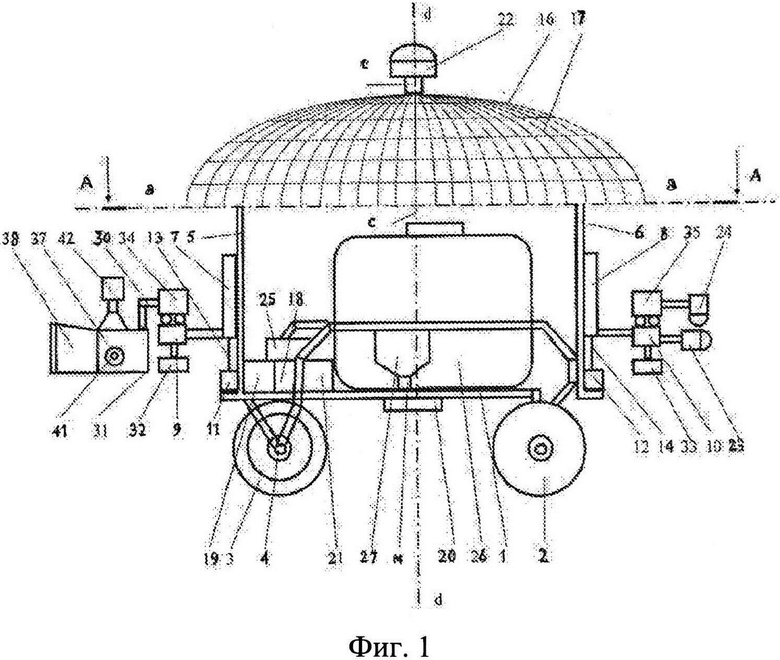
Мобильный робот-опрыскиватель для обработки пестицидами пропашных овощных и низкорастущих ягодных культур, содержащий самодвижущееся четырехколесное шасси в виде горизонтальной рамы с двумя направляющими передними и двумя ведущими задними колесами, заднюю и фронтальную вертикальные прямоугольные рамы с подвижными направляющими, заднюю и фронтальную горизонтальные штанги с механизмами подъема и опускания штанг, систему автономного электропитания в виде блока бортовых аккумуляторных батарей и панель солнечной батареи с множеством объединенных фотоэлементов, систему управления и навигации в виде бортового компьютера, модуля интегрированной навигационной системы, блок управления электроприводами шасси, систему технического зрения, включающую установленные на фронтальной штанге трехмерный сканирующий лазерный оптический дальномер и цифровые оптико-электронные датчики, систему пенообразования и внесения пестицидов, включающую блок автоматического управления подачей, расходом и распределением рабочих растворов пестицидов и сжатого воздуха, ультразвуковые датчики, бак и миксер для рабочих растворов пестицидов, насосный агрегат, источник сжатого воздуха с пневматическим оборудованием, модули пенообразования и внесения пестицидов, отличающийся тем, что панель солнечной батареи выполнена в виде половины поверхности сплюснутого сфероида вращения, одна из больших осей которого лежит в одной вертикальной плоскости с продольной осью симметрии робота-опрыскивателя, а малая ось совпадает с вертикальной осью, проходящей через центр масс робота–опрыскивателя, на которой сверху панели установлены антенна приемника спутниковой навигационной системы, снизу, под рамой - блок инерциальной навигационной системы, блок автоматического управления подачей, расходом и распределением рабочих растворов пестицидов и сжатого воздуха с одной стороны связан интерфейсом с центральным процессором бортового компьютера, с другой стороны - гидравлическими и пневматическими коммуникациями соединен с модулями пенообразования и внесения пестицидов, а каждый модуль пенообразования и внесения пестицидов снабжен, по крайней мере, тремя пеногенераторами, два из которых расположены горизонтально с общей горизонтальной осью симметрии и выходными отверстиями, направленными навстречу друг другу, а один расположен вертикально, с осью симметрии, перпендикулярной горизонтальной оси, и выходным отверстием, направленным вниз, при этом каждый из модулей пенообразования и внесения пестицидов и каждый цифровой оптико-электронный датчик снабжены автономными приводными механизмами с электрошаговыми двигателями для поступательного перемещения модулей и датчиков вдоль горизонтальных штанг, а продольные оси симметрии цифровых оптико–электронных датчиков и продольные оси симметрии модулей пенообразования и внесения пестицидов постоянно находятся в одной вертикальной плоскости, перпендикулярной осям симметрии задней горизонтальной штанги и осям симметрии фронтальной горизонтальной штанги.
| САМОХОДНЫЙ РОБОТ-ОПРЫСКИВАТЕЛЬ ДЛЯ ОБРАБОТКИ РАСТЕНИЙ ЗЕМЛЯНИКИ И ДРУГИХ НИЗКОРАСТУЩИХ КУЛЬТУР | 2015 |
|
RU2592904C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ФОРМИРОВАНИЕМ УРОЖАЯ | 2003 |
|
RU2264703C2 |
| US 6553299 B1, 22.04.2003 | |||
| US 6907319 B2, 14.06.2005 | |||
| US 2018153084 A1, 07.06.2018 | |||
| US 2019200519 A1, 04.07.2019. | |||

