Изобретение относится к сельскохозяйственному машиностроению, а именно к техническим средствам для химической защиты растений земляники, и может быть использовано при химической обработке других низкорастущих культур.
Известен опрыскиватель для земляники ОНЗ-600 (http://elibrary.ru/item.asp?id=18095411, http://vinogradsadtehnika.ru/opriskivatel-navesnoi-onz-60html), у которого имеется бак и боковые штанги с распылителями.
Недостатком известного устройства является то, что он прицепной, поэтому не исключается вредное воздействие химикатов на оператора-водителя и не имеет защитного кожуха.
Наиболее близким по технической сущности к заявленному устройству является полевой робот в агрегате с опрыскивателем (http://www.technologyreview.com/news/408225/robotic-farmer/), состоящий из рамы, управляемых колес, по крайней мере, два из которых снабжены электромоторами привода опрыскивателя, системы управления и навигации с контрольно-измерительными приборами, систему питания, систему опрыскивания, содержащую емкость для рабочего раствора и штанги.
Недостатком известного устройства является то, что он служит только для борьбы с низкорослыми сорняками и не имеет возможности автоматической адаптации к высоте растений, т.е. изменять высоту штанги в автоматическом режиме. Также опрыскиватель не имеет защитных кожухов для защиты культурных растений от попадания химикатов, и форсунки у него расположены только сверху.
Технической задачей предлагаемого изобретения является повышение безопасности, качества и эффективности процесса химической обработки плантации земляники, снижение количества обработок.
Поставленная техническая задача достигается тем, что у самоходного робота-опрыскивателя для обработки растений земляники и других низкорастущих культур, включающего раму, управляемые колеса, по крайней мере, два из которых снабжены электромоторами, систему управления и навигации с контрольно-измерительными приборами, систему питания, систему опрыскивания, содержащую емкость для рабочего раствора и штанги, согласно изобретению штанга снабжена универсальными датчиками высоты и наличия растений, а также электрическим цилиндром, выполненным с возможностью регулировки высоты расположения штанги в зависимости от высоты культурных растений, и четырьмя распыливающими узлами, при этом каждый узел выполнении в виде трех форсунок, размещенных в защитном кожухе.
Повышение безопасности и минимизация вредного воздействия химикатов на человека достигается путем исключения непосредственного участия оператора-водителя в технологическом процессе. Полезная модель поясняется чертежами.
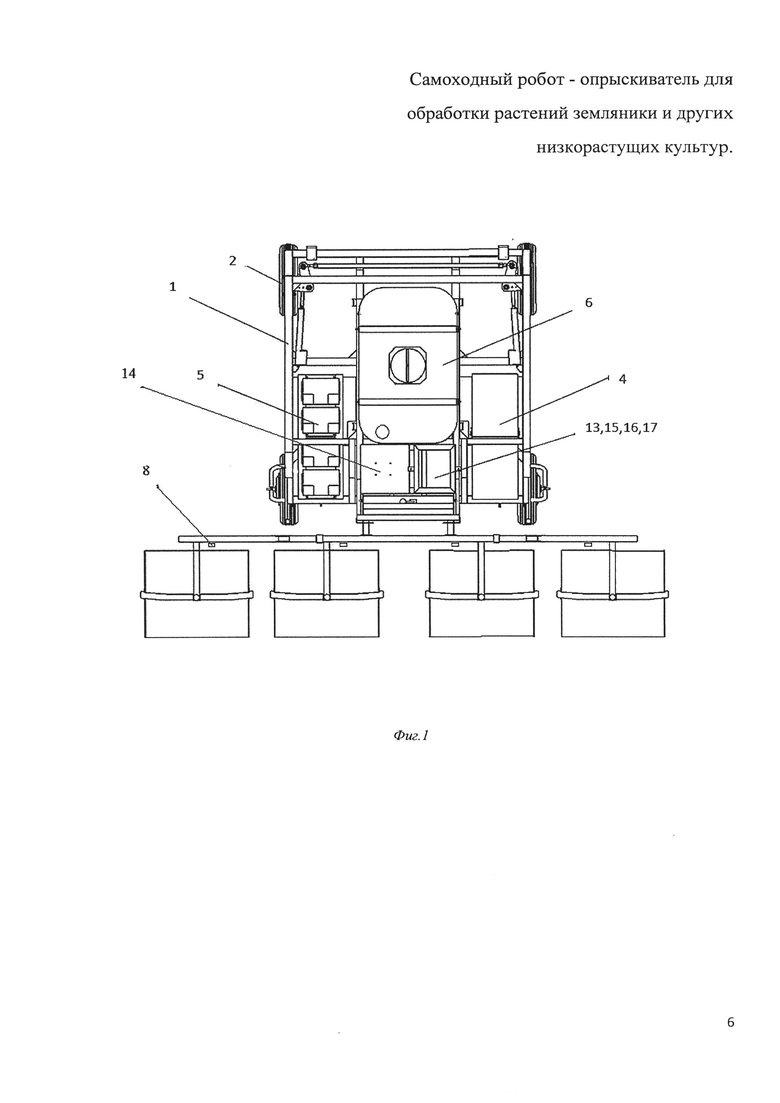
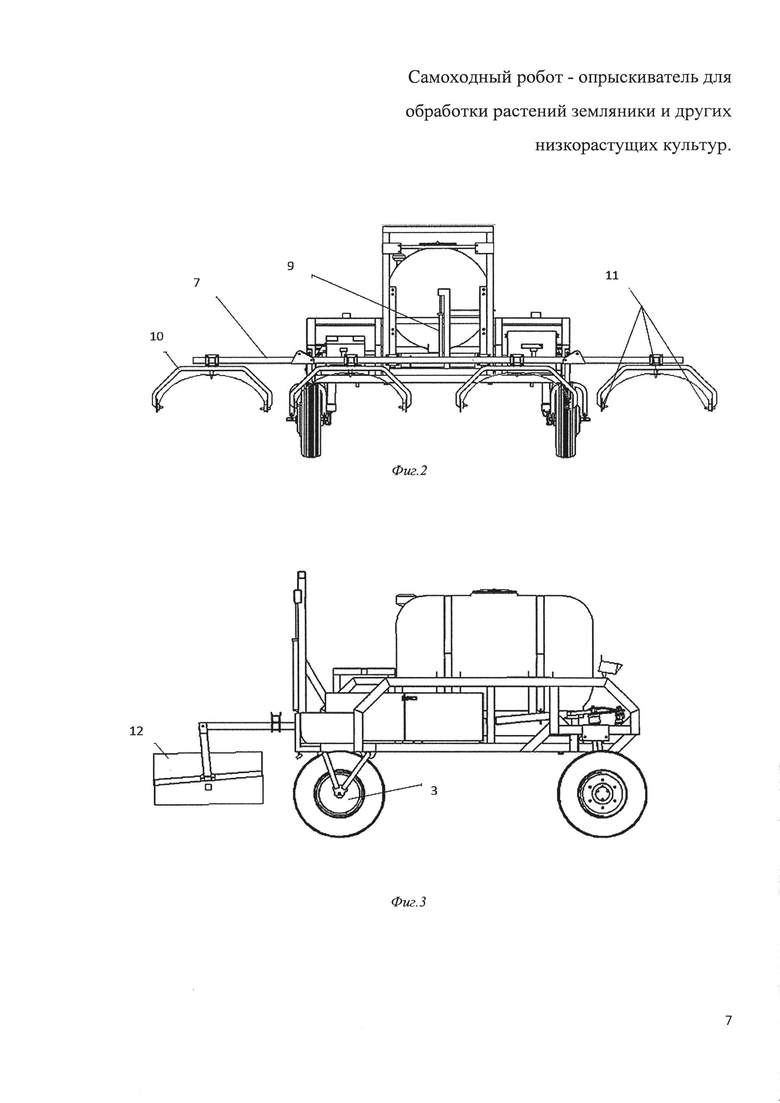
На фиг. 1 схематично представлен самоходный робот-опрыскиватель для обработки растений земляники, вид сверху; на фиг. 2 - то же вид сзади; а на фиг. 3 - то же вид сбоку.
Самоходный робот-опрыскиватель для обработки растений земляники и других низкорастущих культур состоит из рамы 1, колес 2, по меньшей мере, два из которых содержат электромоторы 3 для привода опрыскивателя, а передние колеса 2 являются управляемыми, системы управления и навигации 4 с контрольно-измерительными приборами, системы питания 5 и системы опрыскивания. Система опрыскивания содержит емкость 6 для рабочего раствора, штангу 7, универсальные датчики 8 высоты и наличия растений и электрический цилиндр 9 для регулировки высоты. На штангах 7 расположены, по крайней мере, четыре распыливающих узла 10. Каждый узел 10 содержит по три автоматические форсунки 11 и защитный кожух 12. Робот-опрыскиватель имеет электронасос 13, емкость 14 для промывки, миксер 15, распределитель 16 дифференцированного внесения растворов, бортовой компьютер 17.
Кожух 12 выполнен, например, пластмассовым, в форме полукруга, в котором размещаются три автоматически управляемые форсунки 11, расположенные по дуге относительно друг друга под углом в 90°.
Штанга 7 с опрыскивателями имеет возможность автоматически адаптироваться под высоту обрабатываемых растений, путем поднятия и опускания ее электрическим цилиндром 9 (актуатором).
Устройство работает следующим образом.
Перед началом производственного процесса составляют схемы границ поля и непроходимые места, программируют последовательность разворотов опрыскивателя.
Затем опрыскиватель заезжает в рядки земляники, в автоматическом режиме посредством датчиков 8 и электрического цилиндра 9 подстраивает высоту штанги 7 под высоту растений. Продолжая движение, распыливающие узлы 10 обрабатывают растения химическими препаратами. За счет того, что одна форсунка 11 расположена над кустом, а две другие слева и справа от куста, удается равномерно распределить химикаты по всей кроне растения, в том числе нанести препарат с обратной стороны листьев, при этом защитный кожух 12 препятствует попаданию препарата из зоны опрыскивания на другие растения.
Если в рядке имеются пропуски растений, то по сигналам от датчика 8 поступление химикатов прекращается и возобновляется только там, где есть растения.
Оператор имеет возможность наблюдать за процессом опрыскивания посредством видеокамер и при необходимости может подкорректировать работу самоходного робота-опрыскивателя при помощи пульта дистанционного управления. Для удаленного управления секциями опрыскивателя на устройстве расположен бортовой компьютер 17.
После того как в баке 6 устройства израсходуется весь раствор, робот-опрыскиватель направляется для дозаправки. После дозаправки рабочий процесс продолжается.
Применение заявленного опрыскивателя обеспечит повышенную безопасность процесса химической обработки растений, позволит повысить качество обработки растений, в результате количество обработок можно сократить, что экономит трудовые затраты на 15-25%.
| название | год | авторы | номер документа |
|---|---|---|---|
| Мобильный робот для побелки стволов деревьев | 2022 |
|
RU2795158C1 |
| Мобильный робот-опрыскиватель для обработки пестицидами пропашных овощных и низкорастущих ягодных культур | 2019 |
|
RU2731082C1 |
| Роботизированный гусеничный опрыскиватель для обработки сельскохозяйственных культур | 2019 |
|
RU2701663C1 |
| Робот-опрыскиватель для садоводства | 2022 |
|
RU2790688C1 |
| Мобильный робот-опрыскиватель плодовых деревьев и кустарников | 2022 |
|
RU2794786C1 |
| Мобильный робот для контактного нанесения пестицидов | 2023 |
|
RU2797047C1 |
| Беспилотный робот для внесения гербицидов | 2016 |
|
RU2645165C2 |
| Устройство для внесения гербицидов в приствольную зону плодового сада | 2016 |
|
RU2636400C1 |
| Беспилотный робот для магнитно-импульсной обработки растений | 2016 |
|
RU2630397C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ОПРЫСКИВАТЕЛЬ | 2010 |
|
RU2441373C1 |
Изобретение относится к сельскому хозяйству. Самоходный робот-опрыскиватель для обработки растений земляники и других низкорастущих культур включает раму, колеса, два из которых снабжены электромоторами привода опрыскивателя, выполненные управляемыми передние колеса, системы управления и навигации с контрольно-измерительными приборами, систему питания, систему опрыскивания. Система опрыскивания содержит емкость для рабочего раствора и штанги. При этом штанга снабжена системой автоматической корректировки высоты ее расположения в зависимости от высоты культурных растений, также на штангах расположены четыре распыливающих узла, причем каждый узел снабжен тремя форсунками в защитном кожухе. Применение заявленного опрыскивателя обеспечивает повышенную безопасность процесса химической обработки растений, позволяет повысить качество обработки растений, в результате количество обработок можно сократить, что экономит трудовые затраты на 15-25%. 3 ил.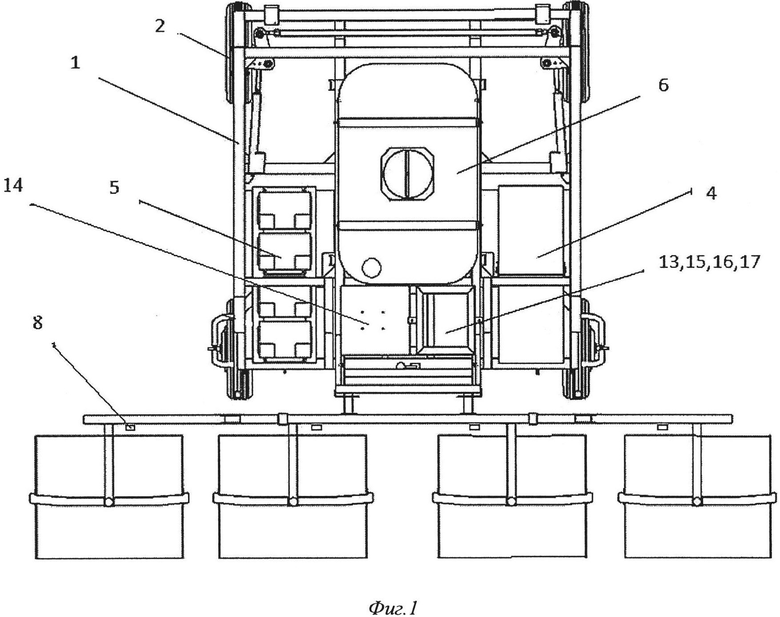
Самоходный робот-опрыскиватель для обработки растений земляники и других низкорастущих культур, включающий раму, управляемые колеса, по крайней мере два из которых снабжены электромоторами, систему управления и навигации с контрольно-измерительными приборами, систему питания, систему опрыскивания, содержащую емкость для рабочего раствора и штанги, отличающийся тем, что штанга снабжена универсальными датчиками высоты и наличия растений, а также электрическим цилиндром, выполненным с возможностью регулировки высоты расположения штанги в зависимости от высоты культурных растений, и четырьмя распыливающими узлами, при этом каждый узел выполнен в виде трех форсунок, размещенных в защитном кожухе.
| [on-line] Robotic Farmer, www.technologyreview.com/news/408225/robotic-farmer, 11.07.2007 [найден 16.11.2015] | |||
| АРТИЛЛЕРИЙСКИЙ СНАРЯД | 1926 |
|
SU10997A1 |
| Электронное реле с регулируемыми выдержками времени на включение и отключение | 1959 |
|
SU123630A1 |

