ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к способу поглощения энергии во время события избыточной нагрузки с использованием поглотителя энергии для уменьшения нагрузки на объект, перевозимый грузовым средством. Поглотитель энергии подходит, в частности, для единичного события избыточной нагрузки, характеризующегося настолько высоким уровнем выделения энергии, что существует возможность или высокая вероятность повреждения объекта, при этом поглотитель энергии поглощает энергию в таком количестве, чтобы снизить результирующую нагрузку на объект в случае избыточной нагрузки и предотвратить непоправимый ущерб. Такое единичное событие избыточной нагрузки происходит, например, при взрыве мины.
УРОВЕНЬ ТЕХНИКИ
Известны различные способы поглощения энергии, направленные на снижение нагрузки в случае событий избыточной нагрузки, таких как взрывы под днищем бронированного транспортного средства, для обеспечения защиты перевозимых объектов, в частности, людей и чувствительных устройств. Для защиты, как правило, используются механические системы, которые поглощают энергию при деформации или разрыве и соответственно, защищают пассажиров во время события избыточной нагрузки. Кроме того, иногда используются гидравлические системы.
Однако недостатком таких систем является то, что они не позволяют управлять демпфированием или поглощением энергии во время события избыточной нагрузки с неизвестной интенсивностью и развитием импульса.
В документе WO 2015/136105 А1 описан способ и сборный узел для поглощения энергии от нагрузок, действующих во время события избыточной нагрузки, для защиты от повреждений, при этом после обнаружения события избыточной нагрузки поглотитель энергии сразу устанавливают на максимальное значение демпфирования, чтобы обеспечить максимально возможное демпфирование в течение заданного периода времени с момента возникновения события. В течение указанного периода времени регистрируется множество последовательных измеренных значений, а после указанного периода времени управление демпфированием осуществляется в зависимости от значений, измеренных в течение указанного периода времени. Это означает, что во время события избыточной нагрузки регистрируется множество измеренных значений, которые используются для составления прогноза для дальнейшего управления. Качество этого способа напрямую зависит от качества измеренных значений и качества устройства управления. Высокое качество требует использования дорогостоящих датчиков и, соответственно, дорогостоящего устройства управления.
СУЩНОСТЬ
Таким образом, целью настоящего изобретения является создание способа и сборного узла для демпфирования, которые обеспечивают лучшее управление демпфированием во время событий избыточной нагрузки, при этом такой способ и сборный узел могут быть реализованы со сниженными накладными расходами.
Данная цель достигается с помощью способа, характеризующегося признаками, раскрытыми в пункте 1 формулы изобретения, и сборного узла, характеризующегося признаками, раскрытыми в пункте 18 формулы изобретения. Предпочтительные варианты осуществления настоящего изобретения указаны в зависимых пунктах формулы изобретения. Дополнительные преимущества и признаки могут быть получены из общего описания, а также описания примеров вариантов осуществления.
Способ поглощения энергии во время события избыточной нагрузки с использованием поглотителя энергии (2) для уменьшения нагрузки на объект (103), перевозимый грузовым средством (100), при этом поглотитель энергии (2) подходит для поглощения энергии, по крайней мере, во время единичного события избыточной нагрузки, характеризующегося настолько высоким уровнем выделения энергии, что без использования поглотителя энергии существует возможность или высокая вероятность повреждения объекта, таким образом, поглотитель энергии снижает результирующую нагрузку на объект во время события избыточной нагрузки посредством поглощения энергии (2), при этом датчик (61) периодически регистрирует измеренные значения (62), относящиеся к текущему состоянию грузового средства (100),
при этом устройство управления (48) обнаруживает событие избыточной нагрузки (65) на основе зарегистрированных измеренных значений (62), характеризующийся тем, что определяется масса перевозимого объекта (103),
и что пороговое значение (68) для нагрузки на перевозимый объект (103) определяется на основе массы,
и что при обнаружении события избыточной нагрузки (65) управление демпфированием поглотителя энергии (2) осуществляется таким образом, что нагрузка на перевозимый объект (103) остается ниже порогового значения (68).
Способ в одном из вариантов реализации, в котором, по меньшей мере, после обнаружения события избыточной нагрузки (65) управление демпфированием поглотителя энергии (2) периодически регулируется посредством периодически регистрируемых значений измерения (62).
Способ в одном из вариантов реализации, в котором устройство управления периодически выводит на основе измеренных значений (62) характеристические параметры для нагрузки на грузовое средство (100).
Способ в одном из вариантов реализации, в котором грузовое средство (100) оснащено срезным устройством (42), которое срезается, когда нагрузка, действующая на грузовое средство (100), превышает порог события избыточной нагрузки (67), при этом устройство управления (48) обнаруживает событие избыточной нагрузки (65), когда датчик срезывания обнаруживает срезывание срезного устройства (42).
Способ в одном из вариантов реализации, в котором устройство управления (48) обнаруживает событие избыточной нагрузки (65), когда характеристический параметр (65) превышает порог события избыточной нагрузки (67).
Способ в одном из вариантов реализации, в котором порог события избыточной нагрузки (67) задается в зависимости от порогового значения (68).
Способ в одном из вариантов реализации, в котором масса перевозимого объекта (103) определяется по нагрузке на грузовое средство (100) в состоянии покоя.
Способ в одном из вариантов реализации, в котором масса перевозимого объекта (103) определяется на основе средней по времени (38) нагрузки на грузовое средство (100).
Способ в одном из вариантов реализации, в котором нагрузка на грузовое средство (100) определяется сразу после активации.
Способ в одном из вариантов реализации, в котором определяют тип перевозимого объекта (103).
Способ в одном из вариантов реализации, в котором определяют блок идентификации (109) перевозимого объекта (103).
Способ в одном из вариантов реализации, в котором считывают память (110) блока идентификации (109) перевозимого объекта (103).
Способ в одном из вариантов реализации, в котором комфортное демпфирование (71) выполняется для части вертикального хода поглотителя энергии (2).
Способ в одном из вариантов реализации, в котором порог события избыточной нагрузки (67) и/или максимальная нагрузка (68) перевозимого объекта (103) являются переменными параметрами.
Способ в одном из вариантов реализации, в котором заданная максимальная нагрузка (68) сохраняется в блоке идентификации (109).
Способ в одном из вариантов реализации, в котором максимальная нагрузка (68) зависит от пола и/или возраста перевозимого человека.
Способ поглощения энергии во время события избыточной нагрузки с использованием поглотителя энергии (2) для уменьшения нагрузки на объект (103), перевозимый грузовым средством (100), при этом поглотитель энергии (2) подходит для поглощения энергии, по крайней мере, во время единичного события избыточной нагрузки, характеризующегося настолько высоким уровнем выделения энергии, что без использования поглотителя энергии существует возможность или высокая вероятность повреждения объекта, таким образом, поглотитель энергии снижает результирующую нагрузку на объект во время события избыточной нагрузки посредством поглощения энергии (2),
при этом датчик (61) периодически регистрирует измеренные значения (62), относящиеся к текущему состоянию грузового средства (100),
при этом устройство управления (48) обнаруживает событие избыточной нагрузки (65) на основе зарегистрированных измеренных значений (62), характеризующийся тем, что определяется нагрузка на перевозимый объект (103), и что при обнаружении события избыточной нагрузки (65) управление демпфированием поглотителя энергии (2) осуществляется таким образом, что нагрузка на перевозимый объект (103) остается ниже порогового значения (68).
Сборный узел (1), включающий грузовое средство (100) для перевозки объектов (103) и поглотитель энергии (2) для поглощения энергии, по крайней мере, во время события избыточной нагрузки, для уменьшения нагрузок, действующих на объект (103), перевозимый грузовым средством (100), при этом поглотитель энергии (2) подходит и сконфигурирован для поглощения энергии в случае единичного события избыточной нагрузки (65), характеризующегося настолько высоким уровнем выделения энергии, что без использования поглотителя энергии (2) существует возможность или высокая вероятность повреждения объекта (103), таким образом, поглотитель энергии (2) снижает результирующую нагрузку, действующую на объект в случае события избыточной нагрузки (65) путем поглощения энергии,
при этом предусмотрено устройство управления (48) и, по меньшей мере, один датчик (61) для регистрации измеренных значений (62), относящихся к текущему состоянию грузового средства (100), и, по меньшей мере, один поглотитель энергии (2), и устройство управления (48) управляет поглотителем энергии (2) на основе измеренных значений (62),
при этом устройство управления (48) настроено и сконфигурировано для обнаружения события избыточной нагрузки (65) на основе зарегистрированных измеренных значений (62), характеризующийся тем,
что устройство управления (48) настроено и сконфигурировано для определения массы перевозимого объекта (103) и порогового значения для нагрузки (68) на перевозимый объект (103) на основе массы,
и что устройство управления (48) настроено и сконфигурировано для управления демпфированием поглотителя энергии (2) при обнаружении события избыточной нагрузки (65) таким образом, что нагрузка на перевозимый объект (103) остается ниже порогового значения (68).
Сборный узел (1) в одном из вариантов реализации, в котором датчик (61) прикреплен к блоку (1), и в котором датчик (61), в частности, прикреплен к амортизированной части (4) сборного узла (1).
Сборный узел (1) в одном из вариантов реализации, в котором датчик (61) включает, по меньшей мере, один датчик, такой как датчик массы, датчик нагрузки и/или полоса измерения расширения.
Сборный узел (1) в одном из вариантов реализации, в котором поглотитель энергии (2) оснащен, по меньшей мере, одним клапаном поглотителя (13), демпфированием которого управляют в соответствии с интенсивностью приложенного магнитного поля.
Сборный узел (1) в одном из вариантов реализации, в котором грузовое средство (100) оснащено срезным устройством (42), которое срезается, когда нагрузка, действующая на грузовое средство (100), превышает заданную величину (67).
Сборный узел (1) в одном из вариантов реализации, в котором грузовое средство (100) выполнено в виде сиденья (21) в транспортном средстве, таком как автомобиль или катер, и сиденье (21) включает в себя приемный блок (101), выполненный в виде сиденья, и несущее устройство (102), выполненное в виде каркаса сиденья, при этом поглотитель энергии (2) расположен между сиденьем и каркасом сиденья.
Способ согласно настоящему изобретению используется для поглощения энергии во время события избыточной нагрузки и осуществляется, в частности, с использованием поглотителя энергии. В результате поглощения энергии нагрузка на объект, перевозимый грузовым средством, уменьшается, по крайней мере, во время события избыточной нагрузки. Поглотитель энергии подходит, в частности, для поглощения энергии во время единичного события избыточной нагрузки, характеризующегося настолько высоким уровнем выделения энергии, что существует возможность, вероятность, высокая вероятность или очень высокая вероятность, или 100% вероятность повреждения объекта без использования поглотителя энергии, таким образом, поглощение энергии поглотителем энергии снижает нагрузку на объект (соответственно, грузовое средство), возникающую в результате события избыточной нагрузки, и, в частности, предотвращает повреждение объекта. Датчик периодически регистрирует измеренные значения, относящиеся к текущему состоянию грузового средства. Устройство управления обнаруживает событие избыточной нагрузки на основе зарегистрированных измеренных значений. Определяется масса перевозимого или планируемого к перевозке объекта. Масса используется для определения порогового значения нагрузки на перевозимый объект. При обнаружении события избыточной нагрузки управление демпфированием поглотителя энергии осуществляется таким образом, что нагрузка, соответственно, величина нагрузки на перевозимый объект остается ниже порогового значения. С этой целью при обнаружении события избыточной нагрузки предпочтительно периодически корректировать демпфирование поглотителя энергии с помощью периодически регистрируемых значений измерения и изменять демпфирование поглотителя энергии, в частности, с помощью периодически регистрируемых значений измерения.
Способ согласно настоящему изобретению имеет много преимуществ. Одним из значительных преимуществ является то, что при обнаружении события избыточной нагрузки демпфирование устанавливается в непосредственной зависимости от текущих измеренных значений. Особым преимуществом является то, что демпфирование устанавливается в зависимости от массы перевозимого объекта.
Предпочтительно, чтобы демпфирование поглотителя энергии устанавливалось не только периодически, но и регулировалось. В этом случае устройство управления может обозначаться как регулирующее устройство или, по крайней мере, включать регулирующее устройство. Система, в которой характеристический параметр определяется на периодической основе, а демпфирование регулируется периодически в зависимости от определенного параметра, также может пониматься как регулирование. Возможно также активное регулирование.
В соответствии с настоящей заявкой под повреждением объекта понимается состояние, при котором объект, по меньшей мере, временно изменился, причем такое изменение считается невыгодным или нежелательным. Такое повреждение может быть временным. Возможны также стойкие или необратимые повреждения.
Если объектом является человек, под повреждением понимается недееспособность или вред здоровью. Стойкое повреждение для человека означает, по меньшей мере, продолжительное ухудшение самочувствия. Повреждение изделия или устройства может быть временным, при этом, в частности, оно может быть стойким и даже представлять собой необратимый дефект, такой как физическое разрушение компонента.
Настоящий способ значительно снижает риск нанесения травм человеку, рассматриваемому в качестве перевозимого объекта. Поскольку при настройке демпфирования требуется учитывать массу перевозимого человека, демпфирование настраивается индивидуально в зависимости от перевозимого человека и его массы, что надежно предотвращает действие слишком высоких нагрузок на невысоких людей. Позвоночник невысоких людей и людей с небольшой массой имеет, к примеру, меньшую площадь поперечного сечения и меньшую прочность и не может выдерживать те же высокие нагрузки, что позвоночник крупных и массивных людей, который, как правило, имеет большую площадь поперечного сечения и, следовательно, большую прочность.
Способ и сборный узел обычно используются в бронированных транспортных средствах или, например, быстроходных катерах и т.п., в которых перевозятся солдаты или полицейские, как правило, имеющие хорошую физическую форму. Таким образом, можно сделать определенные выводы о росте перевозимого человека на основании массы. Однако возможны и предпочтительны индивидуальные корректировки порогового значения.
Способ согласно настоящему изобретению позволяет добиться надежности настройки и управления демпфированием в случае событий избыточной нагрузки, при этом не требуется использование сложного устройства управления со сложным устройством прогнозирования. Это снижает накладные расходы на применение способа согласно настоящему изобретению или использование сборного узла согласно настоящему изобретению, а также понесенные затраты.
Способ согласно настоящему изобретению обеспечивает оптимальное использование возможного рабочего хода во время событий избыточной нагрузки, характеризующихся чрезвычайной мощностью, поскольку подходящее демпфирование может быть установлено индивидуально для каждого перевозимого человека или для каждого перевозимого объекта. Это позволяет добиться оптимальной защиты для каждого человека в отдельности. В частности, демпфирование может быть установлено равным очень высокому значению, но без превышения индивидуального порогового значения для перевозимого человека.
Если датчик прикреплен к сиденью перевозимого человека, то на датчик действует сила массы перевозимого человека. При взрыве мины сначала происходит сжатие подушки или подушки сиденья, на которой сидит пользователь, а затем сжатие позвоночника перевозимого человека. Таким образом, нагрузка на датчик в сиденье уменьшается. Это означает, что периодическая настройка демпфирования с помощью периодически регистрируемых измеренных значений неявно учитывает использование подушки и физические характеристики перевозимого человека. Демпфирование будет всегда оптимальным без необходимости составления прогнозов на основе полученных измеренных значений.
В предпочтительном варианте осуществления устройство управления периодически извлекает из измеренных значений характеристические параметры нагрузки, соответственно, значения нагрузки на грузовое средство. Для этого измеренные значения могут быть, например, преобразованы в стандартные единицы с помощью соответствующих коэффициентов, или могут быть определены не поддающиеся измерению характеристические значения, подходящие для дальнейшей обработки.
Предпочтительно, чтобы грузовое средство имело, по меньшей мере, одно срезное устройство, которое может срезаться, когда нагрузка, действующая на грузовое средство, превышает пороговое значение события избыточной нагрузки. Устройство управления обнаруживает событие избыточной нагрузки при обнаружении срезывания срезного устройства. Преимуществом указанного срезного устройства является то, что вертикальный ход, обеспечиваемый поглотителем энергии, полностью сохраняется перед началом события избыточной нагрузки. В результате этого вертикальный ход полностью доступен во время события избыточной нагрузки, так что даже значительные нагрузки могут быть демпфированы, а их энергия поглощена. Указанный вариант осуществления очень прост в исполнении, поскольку срезное устройство, такое как срезной штифт, может использоваться в качестве основы для реализации способа. Например, датчик периодически регистрирует измеренные значения только тогда, когда датчик срезывания обнаруживает срезывание срезного устройства. Это может быть реализовано, например, с помощью срезного штифта, обеспечивающего непрерывное токопроводящее соединение, прерывание которого инициирует пусковой сигнал для периодической регистрации измеренных значений. В качестве альтернативы можно использовать емкостный или индуктивный датчик. Срезное устройство, например, срезной штифт, предпочтительно подходит для перевозимых людей с самой низкой массой. Перевозка крупного человека может привести к разрушению срезного штифта еще до наступления события избыточной нагрузки. Именно поэтому целесообразно осуществлять непрерывный или периодический мониторинг данных датчиков. Предпочтительно, чтобы устройство управления обнаруживало событие избыточной нагрузки, когда характеристический параметр превышает пороговое значение события избыточной нагрузки. В простых конфигурациях событие избыточной нагрузки обнаруживается, когда измеренное значение превышает соответствующий порог. Этот вариант применяется как с использованием срезного устройства, так и без него. Устройство управления может постоянно регистрировать измеренные значения, поступающие от датчика, и обнаруживать событие избыточной нагрузки с помощью полученных значений характеристических параметров (или непосредственно измеренных значений). Если измеренное или обнаруженное ускорение сиденья превышает определенное значение или если приложенная сила превышает определенный уровень, обнаруживается событие избыточной нагрузки.
Особенно предпочтительно указывать порог события избыточной нагрузки в зависимости от (определенного или индивидуально заданного) порогового значения. Порог события избыточной нагрузки может быть установлен, например, как 50%, 60% или 75% от порогового значения. Такой индивидуальный порог события избыточной нагрузки имеет преимущество в том, что в случае перевозки личного состава в транспортном средстве порог события избыточной нагрузки устанавливается и, соответственно, превышается и индивидуально обнаруживается в зависимости от каждого отдельного человека, что обеспечивает оптимальный учет коэффициента нагрузки каждого человека. При перевозке инструментов или других устройств могут устанавливаться определенные индивидуальные пороги событий избыточной нагрузки в зависимости от чувствительности соответствующего инструмента или устройства. Это, в частности, относится, к перевозке таких предметов, как боеприпасы или взрывчатые вещества или их компоненты.
В предпочтительных вариантах осуществления масса перевозимого объекта определяется по нагрузке на грузовое средство в состоянии покоя (значение нагрузки в состоянии покоя). Такое значение, в частности, определяется при неподвижном состоянии автомобиля или транспортного средства, например, перед тем, как завести автомобиль или начать движение.
В предпочтительных вариантах осуществления масса перевозимого объекта определяется путем усреднения нагрузки на грузовое средство по времени (среднее значение нагрузки). Например, перед запуском транспортного средства можно измерить нагрузку в течение определенного периода времени и получить среднее значение времени. В качестве альтернативы можно определить среднюю по времени нагрузку на грузовое средство во время или после запуска транспортного средства или во время движения. Средняя по времени нагрузка может быть получена и использована для определения индивидуального порога события избыточной нагрузки, например, 1 секунда, 5 секунд или 10 секунд, или для более коротких или более длительных периодов времени.
В частности, нагрузка на грузовое средство определяется сразу после активации. Под активацией, в частности, понимается запуск транспортного средства или активация устройства.
Во всех конфигурациях предпочтительно определять тип перевозимого объекта. Если перевозимыми объектами являются люди, то можно определить, в частности, их пол. В качестве альтернативы могут быть определены возраст или возрастная группа или другие характеристики людей. Предпочтительно обнаруживать блок идентификации перевозимого объекта. Предпочтительно, чтобы память блока идентификации перевозимого объекта была считываемой, проводной или беспроводной. Например, данные из памяти блока идентификации могут считываться с помощью RFID (радиочастотная идентификация), Bluetooth, WLAN или других проводных или беспроводных процессов. Память может содержать сведения о поле, размере, массе и, в частности, также индивидуальное пороговое значение для перевозимого объекта или человека.
Во всех конфигурациях предпочтительно включать индивидуальный коэффициент для определения порогового значения или прямое пороговое значение, что обеспечивает соответствующий контроль. Пороговое значение может, например, увеличиваться или уменьшаться с использованием индивидуального коэффициента, введенного пользователем, например, 80% или на 120%. Возможен также прямой ввод порогового значения.
Во всех конфигурациях предпочтительно, чтобы способ также обеспечивал комфортное демпфирование. В частности, предпочтительно устанавливать соотношение (заранее заданное или выбираемое) вертикального хода поглотителя энергии для комфортного демпфирования. Например, при общем вертикальном ходе 160 мм или 180 мм комфортная функция может быть достигнута при соотношении 30 мм, 40 мм, 50 мм, 60 мм или 70 мм. Например, для комфортной функции может использоваться соотношение не менее 10% от общего вертикального хода. Предпочтительно использовать соотношение не менее 15% или 20% для комфортной функции. Особенно предпочтительным является соотношение общего вертикального хода от 10% до 50%, предпочтительно от 20% до 35% от общего вертикального хода.
Тогда, например, во время езды на бронированном транспортном средстве по открытой местности более слабые (и более тяжелые) удары и толчки могут демпфироваться, в то же время обеспечивается достаточный вертикальный ход, чтобы в случае непредвиденной избыточной нагрузки, такой как взрыв мины, вертикальный ход оставался достаточным для надежной защиты перевозимых людей. В частности, соотношение вертикального хода поглотителя энергии регулируется для комфортной функции.
Также возможно увеличивать демпфирование в комфортном диапазоне по мере приближения фактического вертикального хода к пределу комфортного диапазона, что является предпочтительным.
При использовании срезного устройства возможно не срезать срезной элемент, такой как срезной штифт, до предела комфортного хода, что является предпочтительным. В этом случае срезывание или отрыв срезного элемента может использоваться в качестве сигнала для обнаружения события избыточной нагрузки.
В предпочтительных конфигурациях порог события избыточной нагрузки и/или максимальная нагрузка на перевозимый объект являются переменными параметрами. Порог события избыточной нагрузки и/или максимальная нагрузка могут увеличиваться или уменьшаться пропорционально, в процентах или шагах, что позволяет обеспечить лучшую индивидуальную адаптацию.
Предпочтительно, чтобы предварительно заданное значение максимальной нагрузки хранилось в блоке идентификации.
Особенно предпочтительно, чтобы максимальная нагрузка зависела от пола и/или возраста перевозимого человека. Также возможно, чтобы максимальная нагрузка зависела от физической формы или другого заданного или регулируемого параметра перевозимого объекта.
В предпочтительных вариантах осуществления поглотитель энергии оснащен клапаном поглотителя, демпфированием которого управляют в соответствии с интенсивностью приложенного магнитного поля. В поглотителе энергии, в частности, используется магнитореологическая жидкость, которая контролируется интенсивностью приложенного магнитного поля.
Во всех конфигурациях возможно использовать несколько поглотителей энергии, что является предпочтительным. Таким образом, термин «поглотитель энергии» означает, по меньшей мере, один поглотитель энергии. Поглотитель энергии может содержать два или более блока поглотителя энергии. Каждый из блоков поглотителя энергии может быть идентичным по конструкции, что является предпочтительным. По меньшей мере, один блок поглотителя энергии может быть выполнен в виде поглотителя энергии, описанного выше. Два или более блока поглотителя энергии могут быть расположены рядом друг с другом или на расстоянии друг от друга. Например, на боковых концах грузового средства или поблизости от них может располагаться по одному блоку поглотителя энергии или по одному поглотителю энергии. Два или более или предпочтительно все поглотители (блоки поглотителей) энергии управляются совместно. Они срабатывают, в частности (по крайней мере, по существу), одновременно или, по крайней мере, с перекрытием по времени.
Сборный узел согласно настоящему изобретению с грузовым средством для перевозки объектов содержит, по меньшей мере, один поглотитель энергии, предназначенный для поглощения энергии во время события избыточной нагрузки, чтобы снизить нагрузку на объект, перевозимый грузовым средством. Поглотитель энергии сконфигурирован и подходит для поглощения энергии во время единичного события избыточной нагрузки, характеризующегося настолько высоким уровнем выделения энергии, что существует возможность или высокая вероятность повреждения объекта без использования поглотителя энергии, таким образом, поглощение энергии поглотителем энергии снижает нагрузку (значение нагрузки) на объект в результате события избыточной нагрузки. Предусмотрены устройство управления и, по меньшей мере, один датчик для регистрации измеренных значений, относящихся к текущему состоянию грузового средства, и, по меньшей мере, один поглотитель энергии, при этом поглотитель энергии может управляться устройством управления в соответствии с измеренными значениями. Устройство управления настроено и сконфигурировано для обнаружения события избыточной нагрузки на основе зарегистрированных измеренных значений. Устройство управления настроено и сконфигурировано для определения массы перевозимого объекта и порогового значения нагрузки на перевозимый объект на основе массы. Устройство управления настроено и сконфигурировано для управления демпфированием поглотителя энергии при обнаружении события избыточной нагрузки таким образом, что нагрузка (в частности, значение нагрузки) на перевозимый объект остается ниже порогового значения. В частности, устройство управления настроено и сконфигурировано, по меньшей мере, для периодической регулировки демпфирования поглотителя энергии при обнаружении события избыточной нагрузки, и, соответственно, для адаптации демпфирования с помощью периодически регистрируемых измеренных значений.
Сборный узел согласно настоящему изобретению также имеет много преимуществ. Сборный узел согласно настоящему изобретению позволяет легко и надежно управлять демпфированием в случае события избыточной нагрузки и обеспечить надежную и оптимальную защиту перевозимого объекта, в частности, человека или изделия.
Сборный узел согласно настоящему изобретению предпочтительно оснащен датчиком, прикрепленным к сборному узлу. Датчик может иметь проводную или беспроводную связь либо одновременно проводную и беспроводную связь. Возможно резервное соединение.
Предпочтительно крепить датчик к амортизированной части сборного узла. Например, предпочтительно, чтобы датчик был прикреплен к сиденью, например, с противоминной защитой. В частности, датчик прямо или косвенно определяет массу и, соответственно, силу массы человека, сидящего на нем.
Предпочтительно, чтобы измерительный датчик имел, по меньшей мере, один датчик, такой как датчик массы, и/или, по меньшей мере, одну полосу измерения расширения, и/или датчик нагрузки, и/или другие типы датчиков и датчики для определения силы. Эти типы датчиков позволяют определять или получать на основе измеренных значений значения силы массы или нагрузки на перевозимого человека или объект посредством простых или сложных преобразований, интеграции и/или дифференциации.
В предпочтительных вариантах осуществления поглотитель энергии оснащен, по меньшей мере, одним клапаном поглотителя, демпфированием которого управляют в соответствии с интенсивностью приложенного магнитного поля.
Грузовое средство предпочтительно оснащено срезным устройством, которое может срезаться, когда нагрузка на грузовое средство превышает заданное значение.
Во всех конфигурациях предпочтительно, чтобы сборный узел включал грузовое средство, сконфигурированное как сиденье на транспортном средстве, таком как автомобиль или, например, катер. Блок сиденья включает приемный блок, выполненный в виде сиденья, и несущее устройство, выполненное в виде каркаса сиденья. Поглотитель энергии расположен (по крайней мере, функционально) между сиденьем и каркасом сиденья.
Настоящий способ отличается тем, что он может использоваться для поглощения энергии во время события избыточной нагрузки с использованием поглотителя энергии для уменьшения нагрузки на объект, перевозимый грузовым средством. Поглотитель энергии подходит для поглощения энергии, по крайней мере, во время единичного события избыточной нагрузки, характеризующегося настолько высоким уровнем выделения энергии, что существует высокая вероятность повреждения объекта без использования поглотителя энергии. Во время избыточной нагрузки поглощение энергии поглотителем энергии приводит к снижению результирующей нагрузки (значения результирующей нагрузки) на объект. В частности, датчик периодически регистрирует измеренные значения, относящиеся к текущему состоянию грузового средства. Устройство управления обнаруживает событие избыточной нагрузки на основе зарегистрированных измеренных значений. Затем определяется (периодически) нагрузка (значение нагрузки) на перевозимый объект. При обнаружении события избыточной нагрузки управление демпфирование поглотителя энергии осуществляется таким образом, что нагрузка (значение нагрузки) на перевозимый объект остается ниже порогового значения. Заявитель оставляет за собой право подавать отдельную заявку для защиты настоящего способа.
Настоящий сборный узел отличается тем, что он включает в себя грузовое средство для перевозки объектов и поглотитель энергии для поглощения энергии, по крайней мере, во время события избыточной нагрузки, для уменьшения нагрузки на объект, перевозимый грузовым средством. Поглотитель энергии подходит и настроен для поглощения энергии во время события избыточной нагрузки, характеризующегося настолько высоким уровнем выделения энергии, что существует возможность или высокая вероятность повреждения объекта, перевозимого грузовым средством, без использования поглотителя энергии, таким образом, поглотитель энергии снижает результирующую нагрузку (значения результирующей нагрузки), действующую на объект в случае события избыточной нагрузки, путем поглощения энергии. Предусмотрены устройство управления и, по меньшей мере, один датчик для регистрации измеренных значений, относящихся к текущему состоянию грузового средства, и, по меньшей мере, один поглотитель энергии, при этом управление поглотителем энергии может осуществляться с помощью устройства управления на основе измеренных значений. Устройство управления настроено и сконфигурировано для обнаружения события избыточной нагрузки на основе зарегистрированных измеренных значений. Устройство управления настроено и сконфигурировано для определения нагрузки на перевозимый объект. Устройство управления настроено и сконфигурировано для управления демпфированием поглотителя энергии при обнаружении события избыточной нагрузки таким образом, что нагрузка (значение нагрузки) на перевозимый объект остается ниже порогового значения. Заявитель также оставляет за собой право подавать отдельную заявку для защиты настоящего сборного узла.
Вышеописанный способ и вышеописанный сборный узел имеют много преимуществ. Способ прост в применении и обеспечивает существенную защиту. В вариантах осуществления настоящего способа и сборного узла могут быть дополнительно реализованы отдельные, некоторые или все признаки вышеописанных конфигураций.
ПОДРОБНОЕ ОПИСАНИЕ
Дальнейшие преимущества и признаки настоящего изобретения могут быть получены из описания примеров вариантов осуществления, рассмотренных ниже со ссылками на прилагаемые рисунки.
Содержимое чертежей:
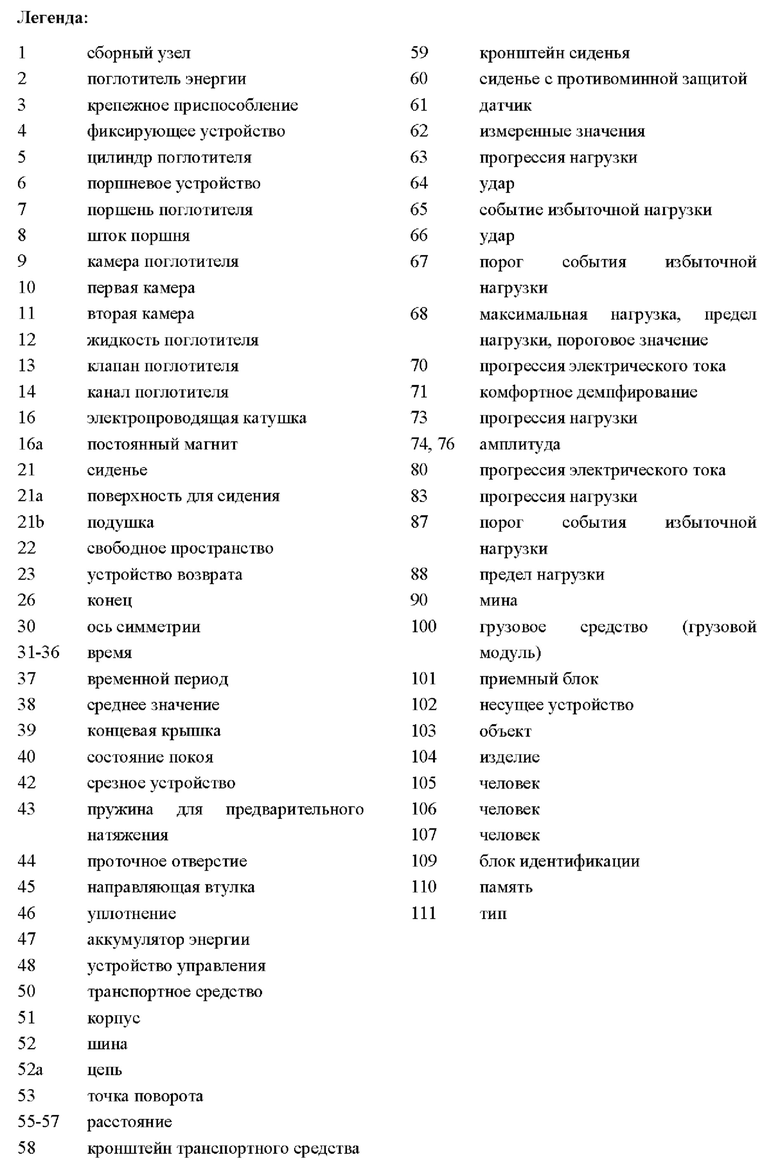
Рисунок 1 схематический вид сборного узла в перспективе согласно настоящему изобретению;
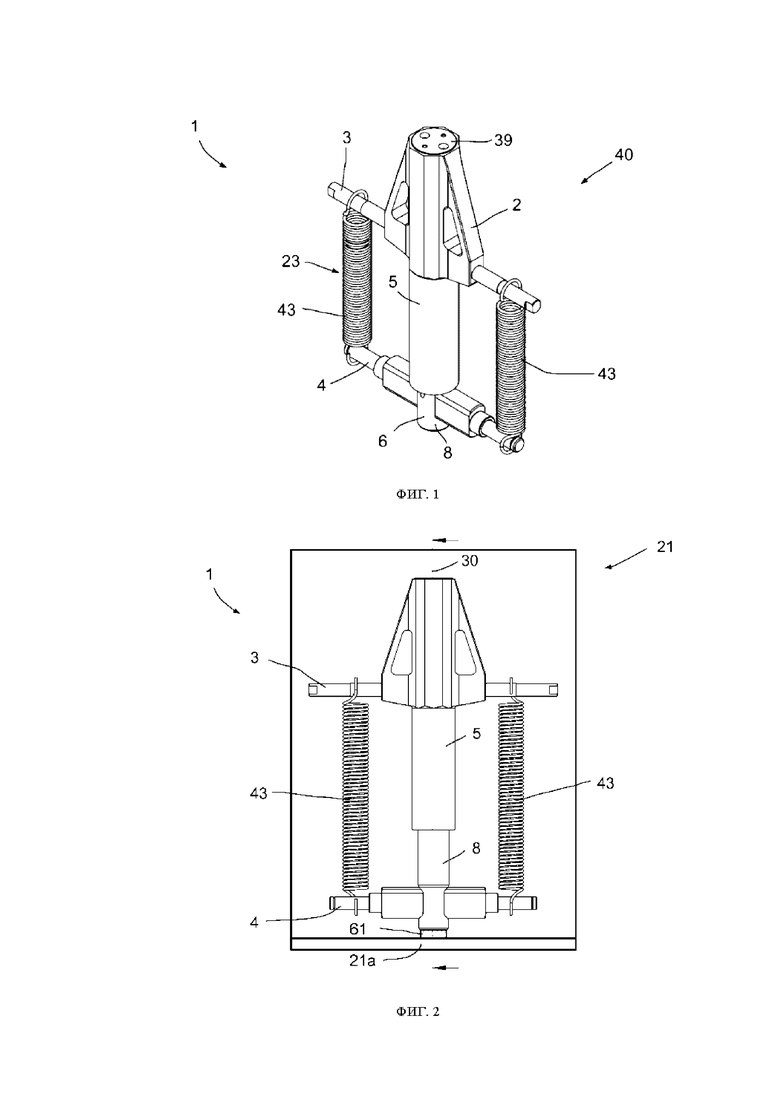
Рисунок 2 - вид сборного узла спереди согласно Рисунку 1;
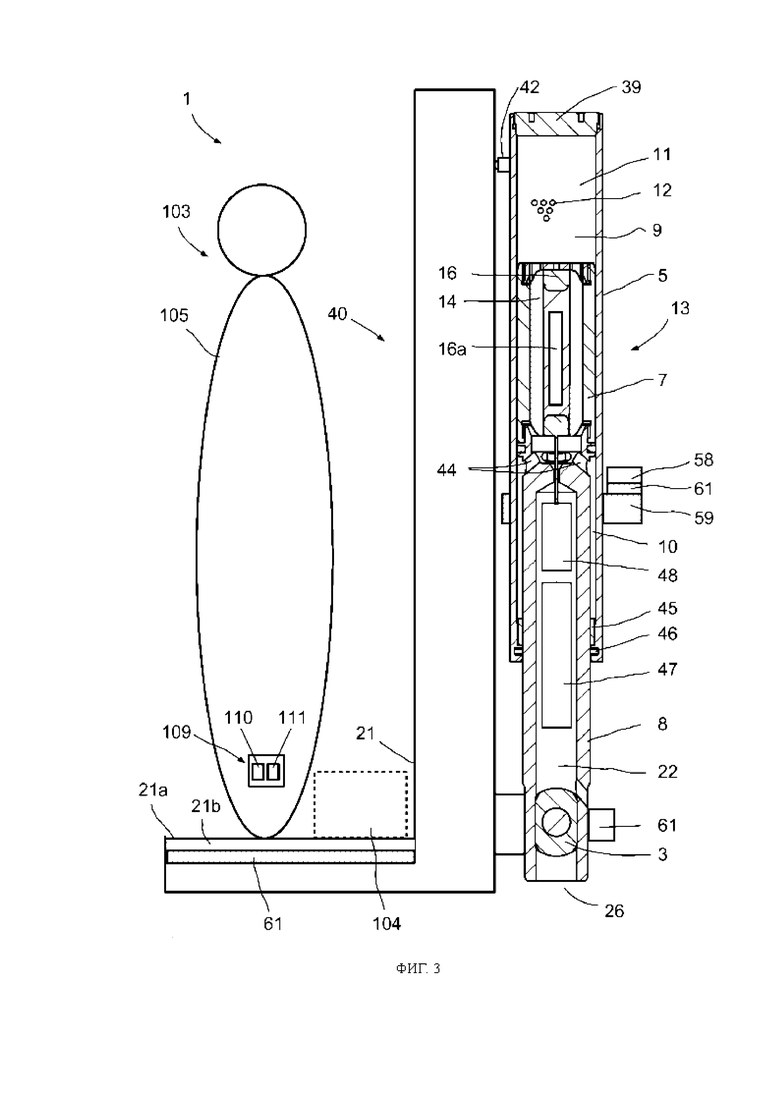
Рисунок 3 - вид сборного узла сбоку в разрезе согласно Рисунку 1 в состоянии демпфирования;
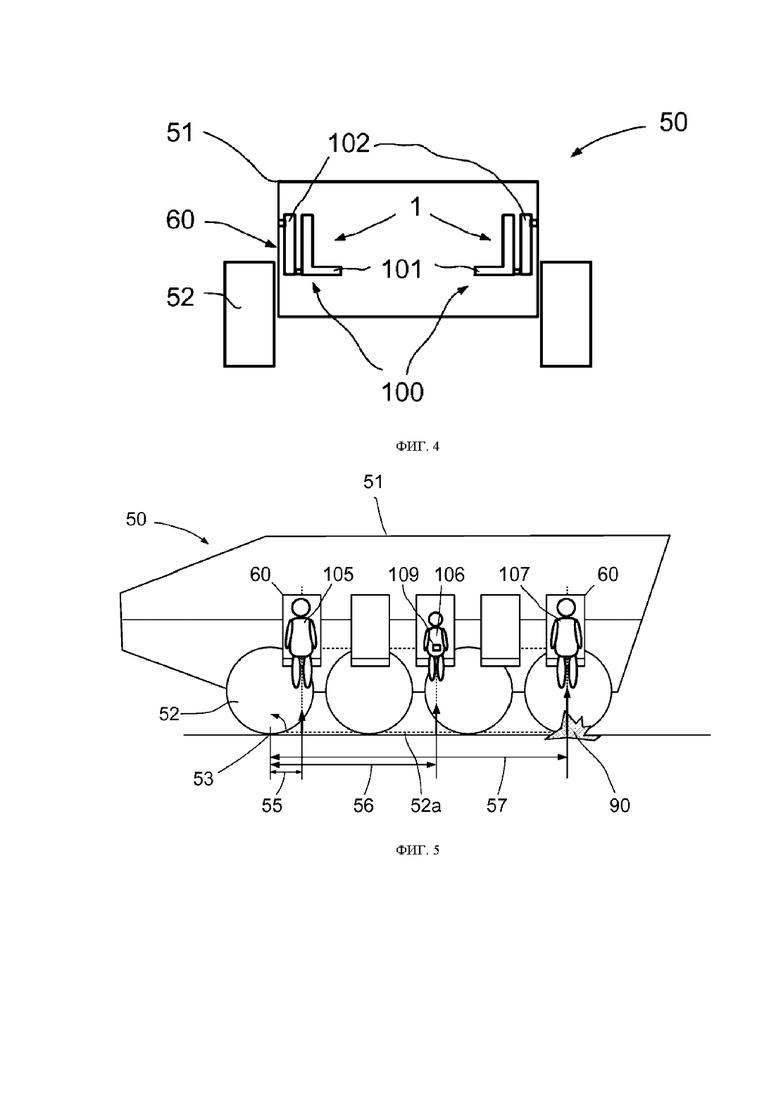
Рисунок 4 - упрощенный поперечный разрез транспортного средства со сборными узлами согласно настоящему изобретению для зашиты пассажиров от взрывов;
Рисунок 5 - упрощенный продольный разрез транспортного средства со сборными узлами согласно настоящему изобретению для зашиты пассажиров от взрывов;
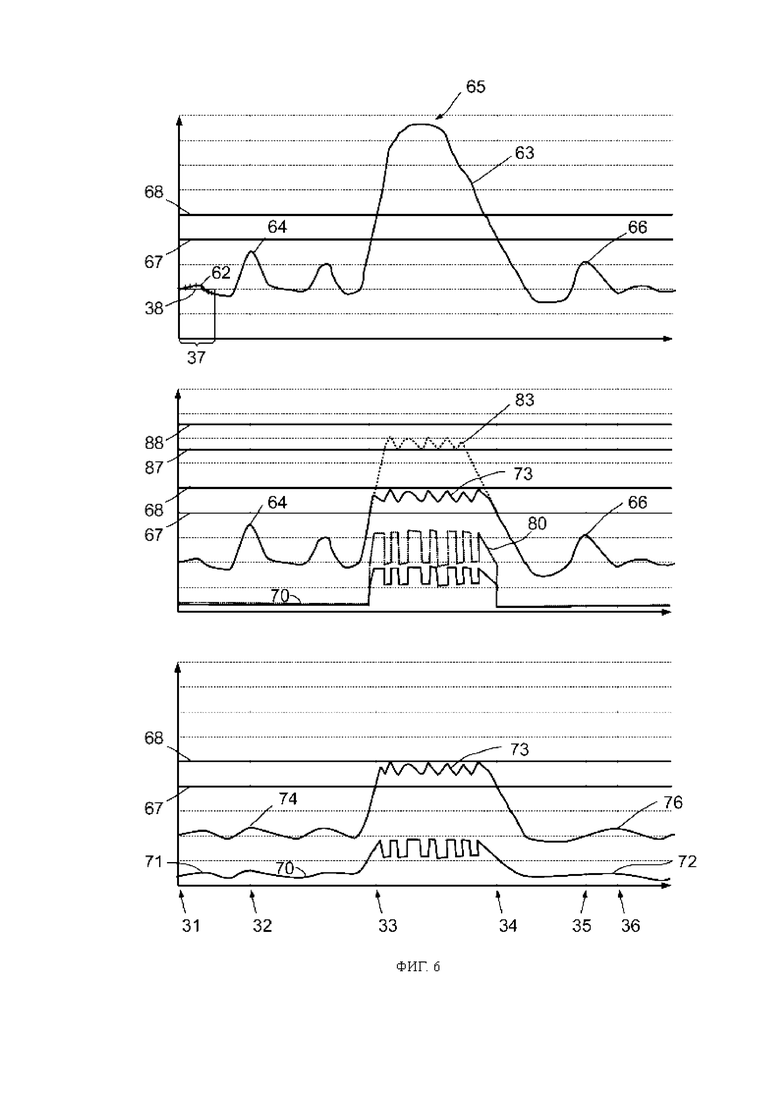
Рисунок 6 - временной график нагрузки, действующей при взрыве мины, иллюстрирующий кривую без демпфирования, кривую без комфортной функции и кривую с комфортной функцией.
На Рисунке 1 представлен схематический вид в перспективе сборного узла 1 согласно настоящему изобретению. Сборный узел содержит цилиндр поглотителя 5, на одном конце которого установлено крепежное приспособление 3, а на другом конце - фиксирующее устройство 4. Фиксирующее устройство 4 и крепежное приспособление 3 имеют по два выступающих в сторону плеча, между которыми установлена пружина для предварительного натяжения 43 каждого из устройств для предварительного натяжения или устройства возврата в исходное положение 23, которые предназначены для перемещения сборного узла 1 обратно в состояние покоя 40, которое также показано на Рисунке 1, после события избыточной нагрузки 65. В других конфигурациях сборный узел 1 может иметь только одно выступающее в сторону плечо или не иметь ни одного плеча.
Сборный узел 1 предназначен для поглощения энергии или демпфирования относительных перемещений между крепежным приспособлением 3 и фиксирующим устройством 4. Для этого фиксирующее устройство 4 соединено с поршневым устройством 6 поглотителя энергии 2, при этом крепежное приспособление 3 жестко соединено с цилиндром поглотителя 5. В верхнем конце сборного узла расположена концевая крышка 39, которая закрывает и ограничивает вторую камеру, входящую в состав камеры поглотителя 9, которая находится внутри. Сборный узел 1, в частности, встроен в грузовое средство (грузовой модуль) 100 между приемным блоком 101 и несущим устройством 102 (см. Рисунки 3 или 4).
На Рисунке 2 представлен вид спереди сборного узла 1. Ось симметрии 30, через которую проходит сечение, изображенное на Рисунке 3, проходит через центр цилиндра поглотителя 5. На Рисунке 2 схематически представлено сиденье 21 и поверхность для сидения 21а, на которой может сидеть человек 105. Изделия 104, животные или другие объекты 103 могут перевозиться и защищаться, например, от взрывов мины во время перевозки.
Сиденье 21 также можно прикрепить к быстроходному катеру для демпфирования ударов, например, от волн. При движении быстроходных катеров может возникнуть очень сильная волна, например, один раз в минуту, которая вызывает значительно более высокую нагрузку, чем другие волны. В таком случае целесообразно предусмотреть поглотитель энергии для демпфирования событий избыточной нагрузки. В этом случае событием избыточной нагрузки является, соответственно, высокая волна.
На Рисунке 3 схематически представлено сечение, изображенное на Рисунке 2, при этом сборный узел находится в состоянии покоя 40. Кроме того, сиденье 21 схематически представлено как грузовое средство 100. Грузовое средство 100 имеет приемный блок 101 или поверхность для сидения 21а, на которой может сидеть объект 103, такой как человек 105, например, солдат, перевозимый транспортером для личного состава, быстроходным катером и т.п.
Внутри цилиндра поглотителя 5 можно увидеть сечение поршня поглотителя 7, соединенного со штоком поршня 8 поршневого устройства 6. Поршень поглотителя 7 разделяет камеру поглотителя 9, расположенную внутри цилиндра поглотителя 5, на первую камеру 10 и вторую камеру 11. Вторая камера 11 ограничена снаружи концевой крышкой 39 и, в этом случае, герметично уплотнена. Первая камера 10 поддерживается на своем конце направляющей втулкой 45 и закрыта уплотнением 46.
В состоянии покоя первая камера 10, по меньшей мере, частично и, в частности, полностью заполнена (по меньшей мере, одной) жидкостью поглотителя 12. При возникновении события избыточной нагрузки 65 шток поршня 8 выходит из цилиндра поглотителя 5, в результате чего жидкость поглотителя 12 в первой камере 10 проходит через клапан поглотителя 13 с каналом поглотителя 14, выполненный в поршне поглотителя 7, и попадает во вторую камеру 11. В состоянии покоя вторая камера 11 может быть частично заполнена жидкостью поглотителя 12. Альтернативно, в состоянии покоя вторая камера 11 может быть лишь незначительно заполнена жидкостью поглотителя 12 или быть заполнена только воздухом или другим сжимаемым газом или средой. Также возможно заполнение второй камеры 11 несжимаемой средой, которая безвозвратно выталкивается наружу при событии избыточной нагрузки 65 через невидимый перегрузочный клапан.
На рисунке отчетливо видно, что шток поршня 8 имеет (очень) большой диаметр по сравнению с диаметром цилиндра поглотителя, так что лишь сравнительно узкий кольцевой зазор вокруг штока поршня 8 остается для первой камеры 10. Благодаря этому перемещение поршня поглотителя 7 вызывает вытеснение относительно небольшого объема жидкости поглотителя 12 из первой камеры 10. Следовательно, значения расхода жидкости поглотителя 12 в канале поглотителя 14 остаются низкими даже в случае возникновения событий избыточной нагрузки 65, вызванных взрывами, так что длина поршня 7 поглотителя является достаточной для оказания воздействия на поток жидкости поглотителя при помощи магнитного поля электропроводящей катушки 16, действующей в качестве генерирующего поле устройства 16.
Используемая жидкость поглотителя 12 представляет собой, в частности, магнитореологическую жидкость, которая контролируется интенсивностью приложенного магнитного поля электропроводящей катушки 16. Катушка означает катушки, намотанные поперек оси симметрии 30. Может использоваться постоянный магнит 16а, создающий основное магнитное поле, модулируемое катушкой 16. Впоследствии постоянный магнит 16а будет всегда устанавливать минимальное значение демпфирования, которое может увеличиваться или уменьшаться с помощью активно управляемого магнитного поля катушки 16.
При создании потока жидкости, соответственно, жидкости поглотителя 12 из первой камеры 10 во вторую камеру 11, жидкость поглотителя 12 перемещается внутрь сборного узла через радиальные проточные отверстия 44, которые проходят радиально под углом от наружной поверхности во внутреннее пространство. Из этого следует, что проточный канал или канал поглотителя 14 смещен в радиальном направлении ближе к центру цилиндра, чем первая камера 10. Это позволяет эффективно использовать внутреннее пространство поршня поглотителя 7 для генерирования необходимого магнитного поля, а также для размещения канала поглотителя 14, показанного штрихом.
Шток поршня 8 выполнен со значительно большей толщиной, чем необходимо для обеспечения устойчивости. Следовательно, шток поршня 8 характеризуется наличием свободного пространства 22, которое представлено в качестве глухого отверстия. Глухое отверстие 22 проходит от конца 26, противоположного поршню, в шток поршня 8. Свободное пространство 22 может проходить лишь до начала поршня поглотителя 7, в результате чего длина свободного пространства 22 составляет три четверти или более длины штока поршня 8 до поршня поглотителя 7. Соответственно, свободное пространство 22 может использоваться. Устройство управления 48 и аккумулятор энергии 47 расположены в свободном пространстве 22. Устройство управления 48 соединено с электропроводящей катушкой 16 для целей управления. Более того, устройство управления 48 соединено с датчиком 61, для того чтобы получать и обрабатывать нагрузку, действующую на грузовое средство 100, выполненное в виде сиденья 21.
Аккумулятор энергии 47 обеспечивает то, что даже в случае отказа системы питания, установленной на борту транспортного средства или, по крайней мере, в течение определенного периода времени после отказа системы питания сборного узла 1 обеспечивает достаточное количество энергии для управления поглотителем энергии 2. Аккумулятор энергии может представлять собой конденсатор или аккумуляторную батарею. Также можно не предусматривать свободное пространство и/или аккумулятор энергии.
Поршень поглотителя 7 не только отделяет первую камеру 10 от второй камеры 11, но также образует клапан управления потоком 13, который может управляться устройством управления 48.
Датчик 61 может быть размещен в поверхности для сидения 21а или на ней. Над датчиком 61 может размещаться подушка 21b. Датчик 61 на поверхности для сидения 21а успешно регистрирует нагрузку, соответственно, значение нагрузки перевозимого человека 105 или изделия 104. Нагрузку, соответственно, значение нагрузки на объект 103 удобно измерять напрямую. Амортизирующий эффект подушки 21b учитывается и не требует отдельного измерения.
Также в меньшей, но не менее эффективной степени датчик 61 размещается между кронштейном 59 сиденья 21 и кронштейном 58 на транспортном средстве. Также в этом случае регистрируется значение полезной нагрузки на перевозимого человека 105.
Датчик 61 также используется для определения и, в частности, измерения массы перевозимого объекта 103 или человека 105. Когда человек 105 сидит на сиденье 21, датчик 61 подвергается статической нагрузке. Измеренные значения позволяют определить массу человека 105. Таким образом, можно установить индивидуальное пороговое значение для нагрузки на перевозимого человека 105, соответственно, на перевозимый объект 103.
В простых конфигурациях максимальная нагрузка или пороговое значение для грузового средства 100 может устанавливаться пропорционально массе перевозимого человека. Человек с большей массой и схожей физической формой обычно имеет более крепкие кости. В случае групп оперативной боевой подготовки можно предположить схожую или сопоставимую физическую форму людей. Поэтому можно предположить, что человек с большей массой имеет более стабильную костную структуру и может выдерживать более высокие нагрузки без повреждений и травм. Поэтому для обеспечения соответствующего запаса вертикального хода поглотителя во время события избыточной нагрузки 65, такого как взрыв мины, лучше подвергать высоким нагрузкам более тяжелого человека, что может быть обеспечено путем индивидуального определения массы перевозимых людей. Отдельный датчик не требуется.
Может использоваться датчик 61, который, в частности, выполнен в виде датчика массы, полосы измерения расширения и т.п.Также можно использовать различные датчики 61 или различные датчики измерительного датчика 61 для определения массы перевозимого человека 105.
Для человека стандартной массы, например, 75 кг может быть задано конкретное пороговое значение нагрузки. Могут устанавливаться проценты отклонений для людей с большей или меньшей массой тела.
Предпочтительно регистрировать массу перевозимого человека или объекта, когда соответствующий человек 105 сидит на поверхности для сидения 21. Можно регистрировать массу при активации или запуске сборного узла 1. В качестве альтернативы можно определить среднее время при запуске или после запуска, соответственно, активации сборного узла 1 и использовать полученные значения для последующих расчетов. Среднее время повышает точность, особенно в случае статического среднего, до начала движения транспортного средства. Однако движущееся транспортное средство также позволяет вычислять среднее время для массы перевозимого человека и давать достаточно точный результат.
На Рисунке 3 также пунктирными линиями показан блок идентификации 109 на перевозимом человеке 103 или альтернативном изделии 104. Блок идентификации 109 предпочтительно включает в себя память 110, содержащую данные о типе 111 и характеристиках человека 103 и его индивидуальном пороговом значении. Память ПО может, например, содержать требования к увеличению индивидуального порогового значения на 10%, что дает возможность предпочтительно определять связанное с массой пороговое значение для перевозимого человека 105, которое затем индивидуально увеличивается на 10%. Соответственно, пороговое значение может уменьшаться. В качестве альтернативы можно сохранять в памяти 110 фиксированное пороговое значение, которое устанавливается независимо от массы перевозимого человека 105.
В качестве альтернативы память 110 блока идентификации 109 может содержать дополнительные данные о типе 111, такие как пол, возраст или физическая форма. Эти данные также могут использоваться и учитываться при определении индивидуального порогового значения.
Передача содержимого памяти ПО блока идентификации 109 в сборный узел 1 может быть проводной и/или беспроводной. Для передачи могут использоваться различные способы. Передача может осуществляться, например, с помощью RFID. Передача может выполняться, когда перевозимый человек касается или активирует специальный переключатель на сборном узле 1 для установления связи.
На Рисунках 4 и 5 представлены схематические поперечные и продольные сечения транспортного средства 50, такого как транспортер для перевозки личного состава, которое оснащено сборными узлами 1 согласно настоящему изобретению для защиты пассажиров от взрывов. Транспортное средство 50 имеет корпус 51, к которому присоединены сиденья 60 с противоминной защитой в качестве сборных узлов 1. Транспортное средство 50 может перемещаться при помощи колес, в настоящее время с шинами 52, хотя оно может быть частично или полностью оснащено цепями. Во время события избыточной нагрузки 65, такого как взрыв, транспортное средство 50 будет подброшено вверх, при этом грузовое средство 100 сборных узлов 1, которое идентифицировано в качестве сиденья 21, подвергнется демпфированному перемещению для защиты сидящих на нем людей от необратимого повреждения.
На Рисунке 5 представлено схематическое продольное сечение транспортного средства 50, такого как транспортер для перевозки личного состава, которое имеет кузов 51 и несколько колес 52, а также цепной привод. Цепной привод, используемый в качестве опции вместо или дополнительно к колесам 52, схематически представлен как цепь 52а пунктирными линиями. Внутри расположено несколько сидений 21, на которых может перевозиться несколько человек 105-107.
В задней части транспортера для перевозки личного состава 50 представлен упрощенный вид взорвавшейся мины 90. Задняя часть транспортера для перевозки личного состава 50 поднята. Точка поворота 53 расположена, например, на переднем колесе 52. Расстояния 55, 56 и 57 от передней точки поворота 53 показывают разные ускорения и, таким образом, вызывают разные силы, действующие на людей 105, 106 и 107. Ввиду значительно более короткого расстояния 55 от точки поворота 53 нагрузка (значение нагрузки) на человека 105 значительно меньше, чем нагрузка на человека 107, значительно удаленного 57 от точки поворота. Ввиду значительно более короткого расстояния 56 нагрузка на человека 106 на расстоянии 56 меньше по сравнению с расстоянием 57.
В этом случае перевозимый человек 106 имеет меньший рост и массу по сравнению с другими людьми 105 и 107, что приводит к уменьшению силы, действующей на человека 106. Однако следует учитывать, что человек с меньшей массой 106 показывает меньшую устойчивость при нагрузке, поэтому максимальная нагрузка на человека 106 обычно меньше, чем у более крупного и тяжелого человека 107. В то же время при схожих действующих ускорениях нагрузка уменьшается с уменьшением массы.
Индивидуальная регистрация массы каждого из людей 105-107 позволяет получить индивидуальное значение демпфирования сборных узлов 1 для каждого из сидений 21.
Это обеспечивает надежную защиту каждого из людей 105-107, так как допустимые индивидуальные пороговые значения 68 для нагрузки не превышаются. Демпфирование поглотителя энергии 2 устанавливается с помощью устройства управления 48, поэтому в любое время, даже при событии избыточной нагрузки 65, нагрузка или значение нагрузки не превышает соответствующий предел нагрузки 68.
Измеренные значения нагрузки регистрируются периодически, а сила тока в поглотителе энергии 2 устанавливается на основе полученных измеренных значений с учетом индивидуальных пределов нагрузки 68, не выходящих за пределы допустимых максимальных нагрузок 68. После каждого измерения предпочтительно выполнять регулировку силы тока для адаптации соответствующего демпфирования. Также возможна регистрация ряда измеренных значений для получения точного сигнала измерения и последующей периодической корректировки силы тока. Например, измерения могут выполняться каждые 0,1 или 0,5 миллисекунд, тогда как сила тока устанавливается каждые 1, 2, 5 или 10 миллисекунд.
На Рисунке 6 представлены три возможные прогрессии временного графика нагрузки во время события избыточной нагрузки 65, такого как взрыв мины 90, изображенного на Рисунке 5.
На верхнем графике представлена временная зависимость нагрузки, включая событие избыточной нагрузки 65. Изменение возникает при отсутствии демпфирования. Соответственно, в начале при запуске сборного узла датчик 61 может регистрировать измеренные значения 62, начиная с времени 31, в течение временного периода 37, и такие значения могут использоваться для определения средней массы перевозимого человека 105. Среднее значение 38, полученное на основе измеренных значений, используется для установки порогового значения 68 нагрузки на перевозимого человека 105.
На центральном графике представлена временная зависимость с учетом демпфирования избыточной нагрузки. Когда измеренные значения 62 превышают порог события избыточной нагрузки 67, устройство управления 48 обнаруживает событие избыточной нагрузки, вызывая соответствующую реакцию. В качестве альтернативы событие избыточной нагрузки обнаруживают при срезании срезного штифта 42. В любом случае при обнаружении (не позднее) события избыточной нагрузки активируется поглотитель энергии 2, даже если в сборном узле 1 не предусмотрена комфортная функция. Это означает, что удары ниже порога события избыточной нагрузки 67 передаются без демпфирования к сиденью 21. На центральном графике удары 64 или 66 передаются без демпфирования.
На центральном графике Рисунка 6 представлены две разные прогрессии нагрузки 73 и 83 для людей с разной массой. Человек с прогрессией нагрузки 83 имеет большую индивидуальную массу, чем человек с прогрессией нагрузки 73. Разная масса каждого из людей приводит к разным пределам нагрузки 67 и 87. Для человека с меньшей массой применяют порог события избыточной нагрузки 67 и максимальную нагрузку 68, тогда как для людей с большей массой применяют значительно более высокий порог события избыточной нагрузки 87 и значительно более высокий предел нагрузки 88.
На центральном графике Рисунка 6 удары ниже индивидуальных порогов события избыточной нагрузки 67 или 87 передаются без демпфирования, в то время как при превышении порогов события избыточной нагрузки 67 или 87 применяется соответствующая прогрессия электрического тока 70 (сплошная линия), соответственно, 80 (пунктирная линия) для сохранения фактической нагрузки, соответственно, значения фактической нагрузки ниже соответствующих пределов нагрузки 68 или 88. Могут возникать указанные регулирующие колебания, которые показаны здесь только в целях иллюстрации. В зависимости от скорости регулирования и разрешения регулирования может отображаться полностью плавная и непрерывная кривая.
В любом случае нагрузка на каждого из перевозимых людей 105 (106…107) определяется периодически на основе фактической нагрузки с измеренными значениями 62. В зависимости от уровня измеренных значений 62, т.е. соответствующей нагрузки, устанавливается подходящая сила тока для надлежащего демпфирования поглотителем энергии 2. В конечном итоге могут появиться прогрессии нагрузки 73 или 83. Могут возникнуть другие или схожие прогрессии силы тока 70, 80. Для разных людей обычно возникают разные прогрессии силы тока 70, 80.
Нижний график на Рисунке 6 иллюстрирует прогрессию нагрузки 73 для человека 105, изображенного на центральном графике Рисунка 6, при этом дополнительно активировано комфортное демпфирование 71.
Событие избыточной нагрузки 65, в свою очередь, произойдет только в момент времени 33, когда превышен порог события избыточной нагрузки 67. Затем в поглотителе энергии 2 происходит демпфирование в режиме избыточной нагрузки, при этом соответствующие значения силы тока 70, установленные для фактической прогрессии нагрузки 73, сохраняются ниже предела нагрузки 68.
На третьем графике в нижней части Рисунка 6, например, 20% общего вертикального хода поглотителя энергии 2 может обеспечиваться для комфортной функции, что позволяет эффективно демпфировать одиночные удары 64 и 66. Не только сила одиночных ударов 64 и 66 ниже порога события избыточной нагрузки 67 может быть уменьшена, но также могут быть созданы более приемлемые частоты колебаний для перевозимых людей для снижения нагрузки на тела людей. Это может привести к тому, что удар 66, первоначально возникший в момент времени 35, будет воспринят только в момент времени 36 с явно уменьшенной амплитудой 76. Соответственно, при комфортном демпфировании диапазон изменения нагрузки ниже порога события избыточной нагрузки 67 также отображает прогрессию электрического тока, отличную от 0.
Во всех конфигурациях можно установить более жесткое комфортное демпфирование в конце предусмотренного диапазона комфортного демпфирования 71.
Все конфигурации настоящего изобретения также предусматривают еще более жесткое демпфирование при приближении и/или наступлении предела вертикального хода (например, остаточный ход <5% или <10%) поглотителя энергии. Это возможно даже в том случае, если индивидуальный предел нагрузки превышен (незначительно, например, <10%), чтобы, в частности, предотвратить опускание. Опускание может привести к более интенсивному увеличению нагрузки, поэтому умеренное превышение индивидуального предела нагрузки может привести к меньшим разрушительным эффектам или даже полностью предотвратить необратимый ущерб. Такое увеличение может быть реализовано индивидуально.
Во всех конфигурациях предпочтительно, по крайней мере, частично сохранять прогрессии нагрузки, возникающие в процессе работы, и измеренные значения, чтобы впоследствии выполнять оценку и/или улучшать управление с помощью данных оценки.
Также можно сохранить, например, костную структуру перевозимого человека в памяти ПО блока идентификации 109 в качестве параметра и учитывать ее при определении индивидуального предела нагрузки 68.
Группа изобретений относится к области машиностроения. Способ поглощения энергии во время события избыточной нагрузки с использованием поглотителя энергии для уменьшения нагрузки на объект, перевозимый грузовым средством, включает периодическое регистрирование измеренных значений (62), при помощи датчика (61), относящихся к текущему состоянию грузового средства (100), при этом устройство управления (48) обнаруживает событие избыточной нагрузки (65) на основе зарегистрированных измеренных значений (62). Также определяется масса перевозимого объекта (103), и пороговое значение (68) для нагрузки на перевозимый объект (103) определяется на основе массы, и при обнаружении события избыточной нагрузки (65) управление демпфированием поглотителя энергии (2) осуществляется таким образом, что нагрузка на перевозимый объект (103) остается ниже порогового значения (68). Также заявлен сборный узел для поглощения энергии. Обеспечивается лучшее управление демпфированием во время событий избыточной нагрузки. 2 н. и 12 з.п. ф-лы, 6 ил.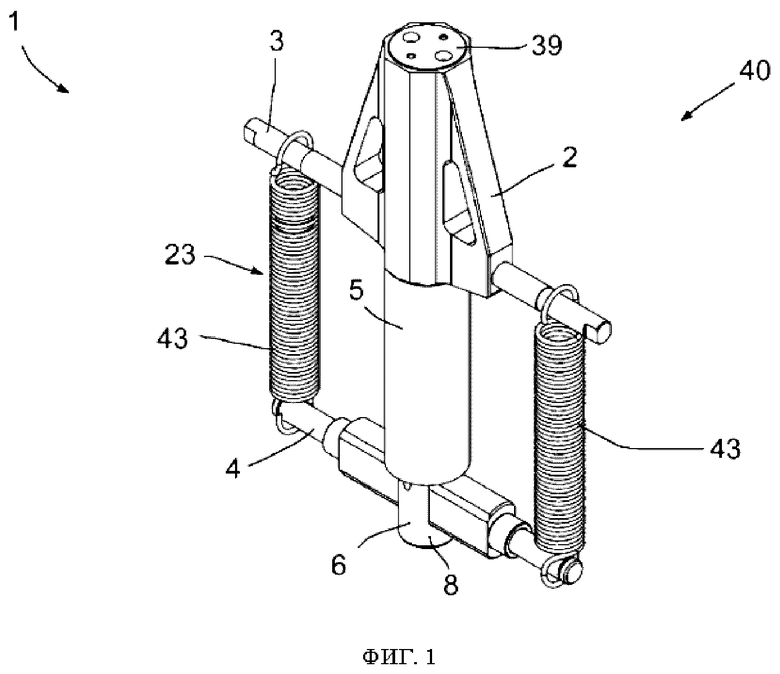
1. Способ поглощения энергии во время события избыточной нагрузки с использованием поглотителя энергии (2) для уменьшения нагрузки на объект (103), перевозимый грузовым средством (100), при этом поглотитель энергии (2) подходит для поглощения энергии, по крайней мере, во время единичного события избыточной нагрузки, характеризующегося настолько высоким уровнем выделения энергии, что без использования поглотителя энергии существует возможность или высокая вероятность повреждения объекта, таким образом, поглотитель энергии снижает результирующую нагрузку на объект во время события избыточной нагрузки посредством поглощения энергии (2), при этом датчик (61) периодически регистрирует измеренные значения (62), относящиеся к текущему состоянию грузового средства (100), при этом устройство управления (48) обнаруживает событие избыточной нагрузки (65) на основе зарегистрированных измеренных значений (62), характеризующийся тем, что определяется масса перевозимого объекта (103), и что пороговое значение (68) для нагрузки на перевозимый объект (103) определяется на основе массы, и что при обнаружении события избыточной нагрузки (65) управление демпфированием поглотителя энергии (2) осуществляется таким образом, что нагрузка на перевозимый объект (103) остается ниже порогового значения (68).
2. Способ по п. 1, в котором, по меньшей мере, после обнаружения события избыточной нагрузки (65) управление демпфированием поглотителя энергии (2) периодически регулируется посредством периодически регистрируемых значений измерения (62).
3. Способ по любому из пп. 1 или 2, в котором устройство управления периодически выводит на основе измеренных значений (62) характеристические параметры для нагрузки на грузовое средство (100).
4. Способ по любому из предшествующих пунктов, в котором грузовое средство (100) оснащено срезным устройством (42), которое срезается, когда нагрузка, действующая на грузовое средство (100), превышает порог события избыточной нагрузки (67), при этом устройство управления (48) обнаруживает событие избыточной нагрузки (65), когда датчик срезывания обнаруживает срезывание срезного устройства (42).
5. Способ по любому из предшествующих пунктов, в котором устройство управления (48) обнаруживает событие избыточной нагрузки (65), когда характеристический параметр (65) превышает порог события избыточной нагрузки (67).
6. Способ по любому из предшествующих пунктов, в котором порог события избыточной нагрузки (67) задается в зависимости от порогового значения (68).
7. Способ по любому из предшествующих пунктов, в котором масса перевозимого объекта (103) определяется по нагрузке на грузовое средство (100) в состоянии покоя.
8. Способ по любому из предшествующих пунктов, в котором масса перевозимого объекта (103) определяется на основе средней по времени (38) нагрузки на грузовое средство (100).
9. Способ по предшествующему пункту, в котором нагрузка на грузовое средство (100) определяется сразу после активации.
10. Способ по любому из предшествующих пунктов, в котором определяют тип перевозимого объекта (103), определяют блок идентификации (109) перевозимого объекта (103) и считывают память (110) блока идентификации (109) перевозимого объекта (103).
11. Способ по любому из предшествующих пунктов, в котором комфортное демпфирование (71) выполняется для части вертикального хода поглотителя энергии (2).
12. Способ по любому из предшествующих пунктов, в котором порог события избыточной нагрузки (67) и/или максимальная нагрузка (68) перевозимого объекта (103) являются переменными параметрами, заданная максимальная нагрузка (68) сохраняется в блоке идентификации (109) и максимальная нагрузка (68) зависит от пола и/или возраста перевозимого человека.
13. Сборный узел для поглощения энергии, по крайней мере, во время события избыточной нагрузки (1), включающий грузовое средство (100) для перевозки объектов (103) и поглотитель энергии (2) для поглощения энергии, по крайней мере, во время события избыточной нагрузки, для уменьшения нагрузок, действующих на объект (103), перевозимый грузовым средством (100), при этом поглотитель энергии (2) подходит и сконфигурирован для поглощения энергии в случае единичного события избыточной нагрузки (65), характеризующегося настолько высоким уровнем выделения энергии, что без использования поглотителя энергии (2) существует возможность или высокая вероятность повреждения объекта (103), таким образом, поглотитель энергии (2) снижает результирующую нагрузку, действующую на объект в случае события избыточной нагрузки (65) путем поглощения энергии, при этом предусмотрено устройство управления (48) и, по меньшей мере, один датчик (61) для регистрации измеренных значений (62), относящихся к текущему состоянию грузового средства (100), и, по меньшей мере, один поглотитель энергии (2), и устройство управления (48) управляет поглотителем энергии (2) на основе измеренных значений (62), при этом устройство управления (48) настроено и сконфигурировано для обнаружения события избыточной нагрузки (65) на основе зарегистрированных измеренных значений (62), характеризующийся тем, что устройство управления (48) настроено и сконфигурировано для определения массы перевозимого объекта (103) и порогового значения для нагрузки (68) на перевозимый объект (103) на основе массы, и что устройство управления (48) настроено и сконфигурировано для управления демпфированием поглотителя энергии (2) при обнаружении события избыточной нагрузки (65) таким образом, что нагрузка на перевозимый объект (103) остается ниже порогового значения (68).
14. Сборный узел для поглощения энергии, по крайней мере, во время события избыточной нагрузки (1) по предшествующему пункту, в котором датчик (61) прикреплен к блоку (1), и в котором датчик (61), в частности, прикреплен к амортизированной части (4) сборного узла (1), датчик (61) включает, по меньшей мере, один датчик, такой как датчик массы, датчик нагрузки и/или полоса измерения расширения, поглотитель энергии (2) оснащен, по меньшей мере, одним клапаном поглотителя (13), демпфированием которого управляют в соответствии с интенсивностью приложенного магнитного поля, грузовое средство (100) оснащено срезным устройством (42), которое срезается, когда нагрузка, действующая на грузовое средство (100), превышает заданную величину (67) и грузовое средство (100) выполнено в виде сиденья (21) в транспортном средстве, таком как автомобиль или катер, и сиденье (21) включает в себя приемный блок (101), выполненный в виде сиденья, и несущее устройство (102), выполненное в виде каркаса сиденья, при этом поглотитель энергии (2) расположен между сиденьем и каркасом сиденья.
| US 2017002890 A1, 05.01.2017 | |||
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ РАНЕВОЙ ПОВЕРХНОСТИ | 2004 |
|
RU2289332C2 |
| WO 2015136105 A1, 17.09.2015 | |||
| НАСТИЛОЧНАЯ МАШИНА | 1935 |
|
SU46231A1 |
