Настоящее изобретение относится к способу поглощения или рассеивания энергии для демпфирования нагрузок, действующих во время одиночного события избыточной нагрузки, в частности, на грузовой блок для перевозки объектов, чтобы обеспечить защиту от повреждений перевозимых объектов, таких как люди или материальные ценности. Таким одиночным событием избыточной нагрузки, влекущим за собой выделение энергии, является взрыв мины.
Из уровня техники хорошо известны способы поглощения энергии в целях снижения нагрузок во время случаев избыточных нагрузок, например, в частности, во время взрывов под днищем бронированных транспортных средств, для обеспечения защиты перевозимых объектов и, в частности, людей и чувствительных к повреждениям устройств. Для обеспечения такой защиты обычно используют механические системы, которые поглощают энергию за счет изменения формы или конфигурации таким образом, чтобы обезопасить пассажиров во время события избыточной нагрузки.
Присущий известным системам недостаток заключается в том, что невозможно управлять поглощением или демпфированием энергии во время события избыточной нагрузки с неизвестными силой импульса и продолжительностью импульса. Силу и продолжительность импульса, вызванного взрывами мин, невозможно спрогнозировать до взрыва, так как тип и мощность мины, расположение, точная позиция, глубина в грунте, а также окружающий мину материал заранее не известны во время реального события избыточной нагрузки. Мониторинг и анализ скорости или других параметров транспортного средства, предшествующих началу события избыточной нагрузки, т.е. взрыву мины, не позволяют оценить мощность взрыва. Следовательно, событие избыточной нагрузки в контексте настоящего изобретения не позволяет точно спланировать процесс поглощения энергии до начала этого события избыточной нагрузки.
В документе WO 2011/141164 A1 раскрыт способ управления поглотителем энергии рулевой колонки, в котором датчик выдает значения относительной скорости компонентов поглотителя энергии, которые выполнены подвижными относительно друг друга. После этого поглотителем энергии управляют таким образом, что замедление характеризуется наиболее постоянными и наименее возможными значениями для того, чтобы, в конце перемещения подвижных частей поглотителя энергии, их относительная скорость приближалась к нулю. Кроме того, в этом документе также говориться о возможности использования такого поглотителя энергии с устройствами ремней безопасности, с сиденьями с противоминной защитой, в бамперах, станках, аэрофинишерах для посадки самолетов на авианосцы, демпфирующих системах для вертолетов и демпфирующих системах для обуви. Указанный способ управления поглотителем энергии, при котором в конце движения компонентов поглотителя энергии, подвижных относительно друг друга, относительное движение замедлится до нуля, может быть осуществлен только тогда, когда известны граничные параметры. Если транспортное средство, движущееся по дороге, врезается в заднюю часть находящегося впереди его автомобиля, то относительная скорость непосредственно известна и весь вертикальный ход может быть оптимально использован для управления замедлением относительного перемещения. Это также справедливо в случае аэрофинишера для посадки самолетов на авианосцы и даже в случае падения вертолета, при котором предварительно известны высота и скорость падения.
Во всех практических применениях оптимально используют максимальный рабочий ход для обеспечения наименее возможных нагрузок, например, чтобы во время автомобильной аварии на водителя воздействовали наименее возможные нагрузки при ударе о рулевую колонку. Такая система хорошо подходит для управления поглотителем энергии, используемым для рулевых колонок или в других практических применениях, в которых значения скорости и, следовательно, возникающие нагрузки известны и доступный рабочий ход может быть коррелирован с текущей относительной скоростью.
В случае практического применения, например, в сиденьях с противоминной защитой, включающего неизвестную мощность взрыва во время события избыточной нагрузки, такого как взрыв мины под днищем бронированного транспортного средства, такая регулировка обеспечивает желаемые результаты только при слабом взрыве. Прикладываемые усилия могут быть ослаблены и переданы телу человека, сидящего на сиденье с противоминной защитой. Нагрузка может быть значительно снижена. Замедление или относительную скорость регулируют таким образом, чтобы на протяжении всего рабочего хода воздействовала постоянная и низкая нагрузка.
Этот способ требует знания начальных и граничных условий. Влияния внешних факторов, величина и продолжительность которых изначально неизвестны, могут привести к неожиданным результатам, так что демпфирование может быть слишком слабым или слишком сильным.
Следовательно, целью настоящего изобретения является создание способа и узла для демпфирования, которые обеспечивают лучшее управление в ходе событий избыточной нагрузки, при этом не все данные, необходимые для оптимального управления, являются доступными перед началом события избыточной нагрузки.
Поставленная цель достигается при помощи способа, характеризующегося признаками, раскрытыми в пункте 1 формулы изобретения, а также при помощи узла, характеризующегося признаками, раскрытыми в пункте 19 формулы изобретения. Предпочтительные варианты осуществления настоящего изобретения раскрыты в зависимых пунктах формулы изобретения. Дополнительные преимущества и признаки могут быть взяты из описания сущности настоящего изобретения, а также описания приведенных в качестве примера вариантов осуществления.
Способ согласно настоящему изобретению служит для управления поглотителем энергии в грузовом блоке, по меньшей мере, во время события избыточной нагрузки, чтобы снизить нагрузки, действующие на объект, перевозимый в грузовом блоке. Поглотитель энергии действует между приемным блоком, предназначенным для приема объектов, предназначенных для перевозки, и несущим устройством, предназначенным для соединения с транспортным средством, таким как автомобиль или т.п. Поглощающая способность поглотителя энергии может контролироваться электрически управляемым блоком генерирования магнитного поля.
Поглотитель энергии хорошо подходит для поглощения энергии во время одиночного события избыточной нагрузки, характеризующегося настолько высоким выделением энергии, что без поглотителя энергии объект, перевозимый в грузовом блоке, будет с высокой вероятностью поврежден, чтобы посредством выполняемого им поглощения энергии снизить нагрузки, действующие на перевозимый объект в результате события избыточной нагрузки.
Способ согласно настоящему изобретению включает следующие стадии, выполняемые в представленной ниже или другой целесообразной последовательности:
- последовательный сбор измеренных значений нагрузок, действующих на грузовой блок, в частности, при помощи измерительного устройства. Измеренные значения могут непосредственно демонстрировать нагрузки на грузовой блок.
Альтернативно, измеренные значения могут быть сняты с транспортного средства или объекта и, следовательно, являются характеристиками нагрузок на грузовой блок или объект.
- определение или обнаружение события избыточной нагрузки, если величина, полученная на основании измеренных значений, превышает заданное пороговое значение.
- после начала события избыточной нагрузки, осуществление оценки прогнозируемой кривой нагрузки (для будущих нагрузок) на грузовой блок исходя из множества измеренных значений, которые собраны по существу после начала события избыточной нагрузки.
- (после этого) определение планируемой кривой потока мощности для блока генерирования магнитного поля, при помощи которого осуществляют динамическое демпфирование прогнозируемой кривой нагрузки с тем, чтобы получить планируемую кривую нагрузки, которая не выходит за пределы заданной предельной нагрузки. В частности, это позволяет предотвратить повреждение, когда существует вероятность или ожидается повреждение объектов.
- динамическое управление потоком мощности через блок генерирования магнитного поля в соответствии с планируемой кривой потока мощности.
Способу согласно настоящему изобретению присущи многочисленные преимущества. Способ обеспечивает надлежащее управление поглотителем энергии во время события избыточной нагрузки, при этом отсутствует необходимость в том, чтобы заранее знать все граничные и исходные условия. Таким образом, прогнозируемую кривую нагрузки (будущую кривую нагрузки) получают из измеренных значений, собранных после начала события избыточной нагрузки, при помощи статистических способов построения кривой на основе данных измеренных значений. Эта оценка или прогноз будущей кривой нагрузки может, например, опираться на эмпирические значения. Следовательно, заключения с высокой степенью вероятности в отношении будущей кривой, характеризующей событие избыточной нагрузки, могут быть выполнены на основе кривой предыдущих измеренных значений, собранных во время события избыточной нагрузки.
Блоком генерирования магнитного поля управляют в зависимости от прогнозируемой кривой нагрузки с тем, чтобы снизить нагрузку на перевозимый объект и с высокой степенью вероятности исключить повреждение. При этом может допускаться риск повреждения в размере, например, 1%, 5%, 10% или более.
Предлагаемый способ обеспечивает поглощение и преобразование импульса или его энергии, действующей во время события избыточной нагрузки, чтобы снизить результирующую нагрузку на защищаемый объект, а также избежать повреждения защищаемого объекта, при этом предлагаемый способ включает применение поглотителя энергии, выполняющего поглощение энергии или рассеивание энергии, или преобразование энергии во время события избыточной нагрузки.
Планируемую кривую потока мощности определяют с использованием прогнозируемой кривой нагрузки. Это означает, что планируемую кривую потока мощности могут динамически рассчитать или же динамическую кривую потока мощности могут извлечь из запоминающего устройства на основе характеристических значений. Кривые могут быть выбраны из готовых кривых, хранимых в запоминающем устройстве.
Под «кривой» (кривой нагрузки, кривой потока мощности и т.п.) всегда следует понимать временную и динамическую кривую соответствующей величины.
Способ может быть использован при перевозке объектов, когда за один раз должен быть перевезен только один объект. Кроме того, за один раз возможна перевозка множества или нескольких объектов. В любом случае, может быть осуществлена последовательная перевозка множества объектов.
Согласно предлагаемому способу грузовой блок или поглотитель энергии грузового блока содержит множество блоков генерирования магнитного поля, при этом каждый блок генерирования магнитного поля может быть оснащен одной или несколькими электропроводящими катушками.
В простых случаях прогнозируемая кривая нагрузки может быть интерпретирована в контексте настоящего изобретения в качестве кривой нагрузки, которая относится к недемпфированной стороне узла. Из корректно прогнозируемой кривой нагрузки можно приблизительно узнать нагрузку на недемпфированной стороне узла. Соответствующую планируемую кривую нагрузки интерпретируют в этом контексте как кривую нагрузки, которая относится к демпфированной стороне узла. Фактическая кривая нагрузки подвержена влиянию действия поглотителя энергии.
Под прогнозируемой кривой нагрузки следует понимать пассивную кривую нагрузки, оцененную на будущее, которая спрогнозирована без учета управляющих действий со стороны блока генерирования магнитного поля. При обнаружении события избыточной нагрузки вначале оценивают и определяют прогнозируемую кривую нагрузки. Указанная прогнозируемая и пассивная кривая нагрузки может быть определена без управления потоком мощности. Кроме того, возможно определить прогнозируемую кривую нагрузки без электрического тока. Из этого следует, что предполагается не только отсутствие изменений в управлении потоком мощности, но и обесточенное состояние поглотителя энергии в случае прогнозируемой кривой нагрузки. Кроме того, возможно определить прогнозируемую кривую нагрузки без какого-либо воздействия магнитного поля. Например, могут быть предусмотрены постоянные магниты, которые создают определенное магнитное поле в блоке генерирования магнитного поля.
Во всех случаях поглотитель энергии действует в качестве устройства, рассеивающего энергию и, в частности, преобразующего кинетическую энергию в тепло. В результате этого достигается, в частности, снижение подводимой энергии. Поглотитель энергии может действовать в качестве демпфирующего устройства и, в частности, в качестве одноразового демпфирующего устройства, чтобы предотвратить повреждение объекта во время одиночных (экстремальных) случаев избыточной нагрузки. Поглотитель энергии предпочтительно соединен с приемным блоком и несущим устройством. Приемный блок и несущий блок являются компонентами грузового блока. Поглотитель энергии допускает относительное перемещение между приемным блоком и несущим устройством, по меньшей мере, во время события избыточной нагрузки. Поглотитель энергии предпочтительно установлен в узле, который совместно с приемным блоком и несущим устройством образуют грузовой блок.
Под повреждением объекта в контексте настоящего документа следует понимать состояние, в котором объект, по меньшей мере, временно изменился, причем такое изменение считается нежелательным или невыгодным. Такое повреждение может быть временным повреждением. Альтернативно, такое повреждение может быть стойким или даже необратимым и приводить к тяжелому повреждению или полному выходу из строя.
Если перевозимые объекты являются людьми, под повреждением следует понимать вред, нанесенный здоровью человека. Под тяжелым повреждением в контексте человека следует понимать, по меньшей мере, продолжительное и серьезное ухудшение самочувствия. Альтернативно, возможно, что повреждение приводит к невосстановимому ухудшению здоровья или даже к смерти человека.
Предпочтительно планируемую кривую потока мощности определяют таким образом, чтобы значение DRI (динамический коэффициент чувствительности) в планируемой кривой нагрузки не превышало заданный уровень.
Повреждение объекта, который является предметом или устройством, может быть временным, при этом, например, произойдет ухудшение свойств предмета или даже потеря некоторых из них в течение конкретного или неопределенного периода. Такое повреждение, в частности, может быть долговременным и может представлять собой необратимый дефект или привести к необратимому дефекту. Например, компонент печатной платы может выйти из строя или может иметь место микродефект или рассогласование устройства, в результате чего устройство может быть снова использовано лишь после сложной повторной настройки, которую можно выполнить лишь в специализированной мастерской.
Во всех случаях повреждение ожидают тогда, когда вероятность повреждения превышает определенный уровень. Повреждение следует ожидать, в частности, если вероятность повреждения превышает, например, 1%, 5%, 10% или даже 25%.
Согласно конкретному предпочтительному варианту осуществления повреждение прогнозируют, если в течение прогнозируемого периода времени прогнозируемая нагрузка, действующая на объект и/или приемный блок, превышает заданную величину. Заданная величина нагрузки может зависеть от типа перевозимого объекта. Например, нагрузка может зависеть от того, перевозятся ли человек, а также от того, какой именно человек перевозится. Заданная величина нагрузки также зависит от того, перевозится ли животное, предмет, а также от типа перевозимого предмета. При отсутствии любых подробностей или информации о природе перевозимых объектов, в качестве исходных данных может быть использован стандартный объект и, следовательно, эти исходные данные используют в отношении нагрузки, действующей на грузовой блок.
При вынесении решения или заключения о том, будет ли иметь место повреждение, учитывают, в частности, уровень и/или продолжительность действующей нагрузки. При определении или расчете нагрузки учитывают, в частности, действующее ускорение и/или действующее усилие. Ускорение может быть непосредственно получено при помощи датчика ускорения. Кроме того, также могут быть использованы один или несколько датчиков перемещения, которые опрашивают с фиксированными или переменными временными интервалами. Собранные данные позволяют рассчитать значения ускорения. Альтернативно, могут быть использованы датчики силы или датчики массы, которые выдают, например, массу перевозимого объекта. Информация о массе позволяет учесть массу объектов с тем, чтобы, например, в случае большого, тяжелого мужчины использовать демпфирование, отличающееся от демпфирования, используемого в случае маленькой, легкой женщины.
Во всех конфигурациях чрезвычайно предпочтительно оценить прогнозируемую кривую нагрузки на основании множества измеренных значений, которые, по меньшей мере, частично собраны по существу после начала события избыточной нагрузки. Во всех случаях можно дополнительно обосновать прогноз исходя из измеренных значений, предшествующих началу события избыточной нагрузки. Предпочтительно, множество или несколько предшествующих измеренных значений используют во время события избыточной нагрузки для улучшения точности и значимости прогноза. Например, если датчик давления расположен на днище транспортного средства, которое является бронированным транспортером для личного состава, и произошла детонация мины под днищем транспортера для личного состава, то произойдет очень быстрое и резкое увеличение давления воздуха в области днища транспортного средства. В определенный момент времени, когда давление, действующее на днище транспортного средства, уже является довольно высоким, солдат, сидящий в грузовом блоке все еще не будет чувствовать эффект взрыва. Крутая кивая увеличения давления, временная кривая и абсолютный уровень достигнутого на данный момент давления воздуха позволят осуществить реальный прогноз того, как взрыв воздействует на весь транспортер для личного состава и на отдельный грузовой блок. В этом случае используется преимущество, заключающееся в том, что датчик давления воздуха, расположенный на днище транспортное средства, обнаруживает нагрузки от взрыва раньше, чем они могут быть обнаружены во внутреннем пространстве транспортного средства. При этом следует отметить, что событие избыточной нагрузки уже началось, и измеренные значения были получены после начала события избыточной нагрузки.
Кроме того, можно использовать по меньшей мере одно измеренное значение или множество или несколько предыдущих измеренных значений с начала или даже перед началом события избыточной нагрузки, например, массу человека или другого объекта.
Во всех случаях планируемую кривую потока мощности определяют таким образом, чтобы динамически демпфировать прогнозируемую кривую нагрузки с тем, чтобы планируемая кривая нагрузки не выходила за границы заданной предельной нагрузки и, в частности, отсутствовало повреждение. Это означает, что планируемая кривая потока мощности характеризуется таким демпфированием, в результате которого прогнозируемая кривая нагрузки на всем своем протяжении будет изменена с тем, чтобы предполагаемая нагрузка находилась ниже предельно допустимой нагрузки (предельной нагрузки). Из планируемой кривой потока мощности следует планируемая кривая нагрузки, которую динамически получают на основе планируемой кривой потока мощности. Помимо влияния блока генерирования магнитного поля, также учитывают базовое демпфирование поглотителя энергии.
Постоянный магнит может, например, генерировать базовое поле. При этом в поглотителе энергии предпочтительно используют магнитореологическую жидкость поглотителя, которая проходит из первого отсека камеры поглотителя через клапан во второй отсек. Следовательно, имеет место гидродинамическое сопротивление, которое также влияет на базовое демпфирование поглотителя энергии.
Во время события избыточной нагрузки продолжают осуществлять измерения. Текущие измеренные значения предпочтительно используют для получения текущей нагрузки, при этом текущий поток мощности адаптируют таким образом, чтобы получить планируемую кривую нагрузки. Обновление текущей нагрузки при помощи текущих измеренных значений может быть осуществлено с каждым получением новых измеренных значений. Кроме того, возможно произвести повторный расчет текущей нагрузки для заданных или выбранных временных интервалов. Кроме того, можно сделать так, чтобы временной интервал между двумя новыми событиями получения данных зависел от последней текущей нагрузки, чтобы обеспечить большее распределение по времени для более высоких нагрузок.
При получении текущей нагрузки, которая отклоняется от планируемой кривой нагрузки, осуществляют соответствующее увеличение или снижение текущего магнитного потока с тем, чтобы получить планируемую кривую нагрузки.
Во всех конфигурациях можно определить или обнаружить событие избыточной нагрузки, если, по меньшей мере, одно измеренное значение превышает заданное значение. Кроме того, возможно и предпочтительно получить прогнозируемое характеристическое значение исходя из измеренных значений, а также обнаружить событие избыточной нагрузки, если прогнозируемое характеристическое значение превышает заданное характеристическое значение. Это имеет место, например, когда оценивают множество последовательных измеренных значений, и исходя из измеренных значений определяют, что, например, имеет место линейное, квадратичное или экспоненциальное повышение измеренных значений. При этом существует высокая вероятность того, что измеренные значения продолжат расти, по меньшей мере, в течение определенного периода времени, в результате чего может быть получено прогнозируемое характеристическое значение, которое учитывает ожидаемые перспективы развития измеренных значений.
Настоящий способ является чрезвычайно предпочтительным, так как начальное достижение высоких и потенциально опасных измеренных значений не является обязательным, при этом предварительно оценивают наиболее вероятное развитие ситуации, а также может быть принято ответное действие, соответствующее вероятному развитию.
Согласно конкретным предпочтительным вариантам осуществления блок генерирования магнитного поля содержит по меньшей мере один постоянный магнит. Постоянный магнит генерирует базовое магнитное поле, которое модулируют при помощи магнитного поля, исходящего от электропроводящей катушки, входящей в состав блока генерирования магнитного поля. Это обеспечивает постоянное наличие определенного базового демпфирования, для осуществления которого не требуется подача электрической энергии. Если необходимо усилить демпфирование, магнитное поле электропроводящей катушки может усилить имеющееся магнитное поле. Если необходимо ослабить демпфирование, базовое магнитное поле постоянного магнита может быть соответствующим образом ослаблено. По меньшей мере одна электропроводящая катушка предпочтительно характеризуется такими размерами, чтобы функционировать только во время события (случая) избыточной нагрузки, длящегося, например, 100 мс. Это позволяет облегчить и удешевить конфигурацию электропроводящей катушки, проводков питания и других компонентов, что, в свою очередь, позволяет удешевить производство узла или исполнительного механизма. При этом следует отметить, что продолжительная подача электрического тока на электропроводящую катушку нежелательна, так как она может сгореть.
После того как имело место обнаружение события избыточной нагрузки, предпочтительно осуществляют периодический сбор измеренных значений. На основе собранных значений периодически осуществляют оценку текущей прогнозируемой кривой нагрузки, отображающей будущую нагрузку на грузовой блок. Из этого следует, что прогноз может быть выполнен не только единожды вначале взрыва, и что новые прогнозы продолжают выполнять по ходу выполнения процесса с тем, чтобы адаптировать протекание процесса к текущему развитию. И в этом случае, пассивные предварительные условия принимают для текущей прогнозируемой кривой нагрузки с тем, чтобы текущее демпфирование добавить к тому, что является измеренной на данный момент нагрузкой для получения текущей, пассивной нагрузки, которая присутствует в пассивном базовом состоянии.
Текущую прогнозируемую кривую нагрузки предпочтительно используют для периодического получения текущей планируемой кривой потока мощности. Следовательно, текущую планируемую кривую потока мощности адаптируют к прогнозируемой на данный момент кривой нагрузки.
Таким образом, прогнозируемую на данный момент кривую нагрузки в последствии используют для определения, имеется ли вероятность повреждения или следует ли ожидать повреждение объектов, перевозимых в грузовом блоке. При определении того, что повреждение больше не ожидается, выполнение процесса может продолжиться соответствующим образом. При определении того, что существует высокая вероятность повреждений, осуществляют принятие соответствующих контрмер.
Предпочтительно определяют планируемую на данный момент кривую нагрузки и выводят соответствующую планируемую кривую потока мощности, при этом прогнозируемую кривую нагрузки динамически демпфируют с тем, чтобы максимальным образом исключить повреждение из планируемой кривой нагрузки.
Согласно всем конфигурациям измеренные значения могут собираться двумя или более датчиками. Например, датчики давления воздуха могут быть установлены на днище или на другом участке транспортного средства. Альтернативно, датчики ускорения могут быть установлены на днище транспортного средства, на грузовом блоке или на несущем устройстве или приемном блоке грузового блока. Датчики могут быть расположены на поверхности объектов. При этом предпочтительно использовать данные из двух или более необязательно различных датчиков.
Согласно предпочтительным конфигурациям измеренные значения получают на основании нагрузок, действующих на грузовой блок, несущее устройство, транспортное средство, эффективного ускорения, эффективного усилия или давления воздуха. В частности, принимают во внимание значения вертикального ускорения.
Используемый в ходе процесса демпфирования поглотитель энергии, установленный на грузовом блоке, предпочтительно содержит камеру поглотителя, которая, по меньшей мере, частично заполнена магнитореологической жидкостью, и по меньшей мере одну электропроводящую катушку, которая формирует блок генерирования магнитного поля или его значительную часть. Поток мощности, протекающий через электропроводящую катушку, соответствующим образом управляет поглощающим блоком.
Грузовой блок согласно настоящему изобретению содержит приемный блок, предназначенный для приема объектов, предназначенных для перевозки, и несущее устройство, предназначенное для соединения с транспортным средство, и по меньшей мере одним поглотителем энергии, расположенным между грузовым блоком и несущим устройством. Поглотитель энергии служит для демпфирования нагрузок, действующих во время события избыточной нагрузки.
Поглотитель энергии выполнен с возможностью и настроен для поглощения энергии во время одиночного события избыточной нагрузки, характеризующегося настолько высоким выделением энергии, что без поглотителя энергии объект, предназначенный для перевозки в грузовом блоке, будет с высокой вероятностью поврежден, чтобы посредством выполняемого им поглощения энергии снизить нагрузки, действующие на перевозимый объект в результате события избыточной нагрузки.
На поглощающую способность поглотителя энергии может воздействовать по меньшей мере один электрически управляемый блок генерирования магнитного поля. Кроме того, предусмотрено устройство управления, а также по меньшей мере одно измерительное устройство для сбора измеренных значений нагрузки, действующей на грузовой блок. Устройство управления настроено и сконфигурировано для обнаружения события избыточной нагрузки, если величина, выведенная на основании измеренных значений, превышает заданное пороговое значение.
Устройство управления настроено и сконфигурировано таким образом, чтобы оценивать, после начала события избыточной нагрузки, исходя из множества измеренных значений, полученных по существу после начала события избыточной нагрузки, прогнозируемую кривую нагрузки на грузовой блок. Устройство управления настроено и сконфигурировано таким образом, чтобы определять планируемую кривую потока мощности для блока генерирования магнитного поля, посредством которого происходит динамическое демпфирование прогнозируемой кривой нагрузки с тем, чтобы планируемая кривая нагрузки не выходила за границы заданного порогового значения. Устройство управления настроено и сконфигурировано таким образом, чтобы динамически управлять потоком мощности через блок генерирования магнитного поля в соответствии с планируемой кривой потока мощности.
Поглотитель адаптирован для одиночной нагрузки. Во время взрыва или подобного события поглотитель рассеивает или поглощает энергию с тем, чтобы снизить нагрузку, действующую на объект.
Кроме того, грузовой блок может быть оснащен срезным устройством, которое срезается, когда нагрузка, действующая на грузовой блок, превышает заданный уровень. При этом устройство управления может обнаруживать событие избыточной нагрузки, когда датчик срезывания, входящий в состав срезного устройства, обнаруживает, что произошло срезывание срезного устройства.
Во всех случаях предпочтительно установить допустимую предельную нагрузку исходя из возможностей среднестатистического человека. Кроме того, могут быть учтены показания, поступающие от блока датчиков, закрепленного на человеке.
Существует возможность интегрирования функции повышения комфорта, чтобы обеспечить демпфирование слабых ударов, находящихся за пределами события избыточной нагрузки.
Во всех случаях можно произвести оценку риска повреждения позвоночника человека, являющегося объектом перевозки, путем определения динамического коэффициента чувствительности (DRI), который оценивает вертикальные удары, например, в катапультируемых креслах, на основе ускорения. Формула для вычисления DRI согласно стандарту НАТО может быть найдена в Википедии (http://en.wikipedia.org/wiki/Dynamic_response_index). Таким образом, при DRI 17,7 вероятность тяжелого повреждения равна 10%.
Кроме того, можно осуществлять регулирование на основе действующего на позвоночник усилия и, в частности, усилия в нижней поясничной области (поясничном отделе позвоночника) при помощи другой величины, соответствующей этому усилию.
Поскольку действующее на позвоночник усилие не может быть измерено непосредственно, выводы о нем следует делать на основании других величин. Например, можно измерить усилие/давление/изгибающий момент, действующие на сиденье с противоминной защитой, каркас сиденья или подушку, расположенную на сиденье с противоминной защитой. Кроме того, могут быть использован оснащенный датчиками мат, аналогичный матам, выдающим локальные распределения давления/усилия.
Кроме того, можно контролировать только подачу мощности: массы пассажиров могут быть получены в течение продолжительного периода времени и соответственные характеристические значения могут быть предварительно рассчитаны. Затем подходящую характеристическую кривую выбирают, например, на основе данных датчиков ускорения.
Настоящее изобретение также включает ответные действия на взрывы, которые оказались более мощными, чем ожидалось. Процесс адаптирован к сложившимся на данный момент условиям, так чтобы оптимально использовать пределы перемещения.
Во всех случаях грузовой блок, в частности, сконфигурирован в качестве устройства для сидения транспортного средства или механизированного транспортного средства. Устройство для сидения содержит приемный блок, сконфигурированный в качестве сиденья, и несущее устройство, сконфигурированное в качестве каркаса сиденья. Поглотитель энергии установлен между сиденьем и каркасом сиденья.
В контексте настоящего изобретения под одиночным событием избыточной нагрузки предпочтительно подразумевают взрыв мины. В частности, другими одиночными событиями избыточной нагрузки, характеризующимися выделением энергии, в контексте настоящего изобретения могут считаться события, при которых сила импульса и продолжительность импульса не могут быть оценены, в частности, на основании предшествующих измеренных значений. Такое одиночное событие избыточной нагрузки возникает, например, во время дорожно-транспортного происшествия, сопровождающегося выездом за пределы дороги, например, когда водитель потерял управление, и транспортное средство неожиданно и непрогнозируемо свалилось в откос или т.п., совершив жесткую посадку на участке, расположенном намного ниже дорожного покрытия. При возникновении таких происшествий величина энергии, воздействующей на транспортное средство во время события избыточной нагрузки, не может быть вычислена из скорости транспортного средства, при этом она зависит от высоты, с которой упало транспортное средство, которая также не может быть вычислена, например, из скорости транспортного средства.
Следовательно, настоящее изобретение может предоставить защиту пассажирам, находящимся в механизированных транспортных средствах, или снизить действующие на них нагрузки во время так называемых происшествий, сопровождающихся выездом за пределы дороги, которые, например, в США являются причиной 50% смертельных случаев во время дорожно-транспортных происшествий.
Выезд дорожных транспортных средств, таких как легковые автомобили, внедорожники, грузовые автомобили и т.п., за пределы дорог с твердым покрытием по причине рассеянности, усталости и плохих погодных условий происходит очень часто. Транспортные средства, оснащенные узлом согласно настоящему изобретению, предпочтительно оборудованы конструкцией для сидения, которая содержит сиденье и каркас сиденья, при этом описанный выше поглотитель энергии поглощает большую часть энергии удара, которая, в частности, характеризуется вертикальным или по существу вертикальным действием. Для того чтобы уберечь пассажиров от опасных повреждений позвоночника, между сиденьем и каркасом сиденья предусмотрен по меньшей мере один поглотитель энергии, предназначенный для демпфирования вертикальных усилий, и/или усилий, направленных параллельно спинке сиденья, и/или усилий, направленных перпендикулярно поверхности для сидения. Эти усилия возникают при сильном (по меньшей мере, частично вертикальном) ударе транспортного средства за пределами дороги. Во время таких событий избыточной нагрузки энергия удара, которая должна быть поглощена, действует в основном или по существу, или почти полностью в вертикальном направлении.
Настоящее изобретение в целом не предназначено для поглощения энергии при лобовых столкновениях. Для поглощения энергии при лобовых столкновениях на стандартных дорогах транспортные средства оснащены деформируемыми зонами или подушками безопасности.
Величина нагрузок, действующих в вертикальном направлении, во время событий избыточной нагрузки и дорожно-транспортных происшествий, сопровождающихся выездом за пределы дороги, или величина вертикальных нагрузок во время взрывов мин не могут быть вычислены из параметров, предшествующих событию избыточной нагрузки, так как они не могут быть оценены или измерены.
Во всех случаях поглотитель энергии может быть установлен вертикально, горизонтально или в положении, которое отличается от вертикального или горизонтального.
Как известно из уровня техники, датчик, установленный на механизированных транспортных средствах, обнаруживает, вышло ли транспортное средство за пределы дороги, и активирует соответствующие системы безопасности, такие как устройства для натяжения ремня безопасности. Однако это не позволяет рассчитать тяжесть происшествий, а также необходимое оптимальное снижение нагрузки. Важным является то, что происходит с транспортным средством после того, как оно съехало с дороги, где и как оно приземлиться или с каким типом земной поверхности оно столкнется, а также какую пространственную ориентацию оно будет иметь во время удара. Способ согласно настоящему изобретению способен обеспечить ответное действие, которое релевантно удару/импульсу, как описано ранее и далее в настоящем документе, что приводит к более оптимальному демпфированию и снижает травмы по сравнению с известными из уровня техники решениями.
Согласно всем конкретным вариантам осуществления, конфигурациям и приведенным в качестве примера вариантам осуществления объект, перевозимый в грузовом блоке, может быть непосредственно или опосредованно прикреплен и/или присоединен к грузовому блоку и/или расположен в грузовом блоке или на его поверхности. Соединение может быть постоянным или/или разъемным. Альтернативно, объект расположен на поверхности грузового блока и удерживается на месте под действием собственной массы.
Дальнейшие преимущества и признаки настоящего изобретения могут быть взяты из описания иллюстративных вариантов осуществления, которые будут рассмотрены ниже со ссылками на прилагаемые фигуры, где
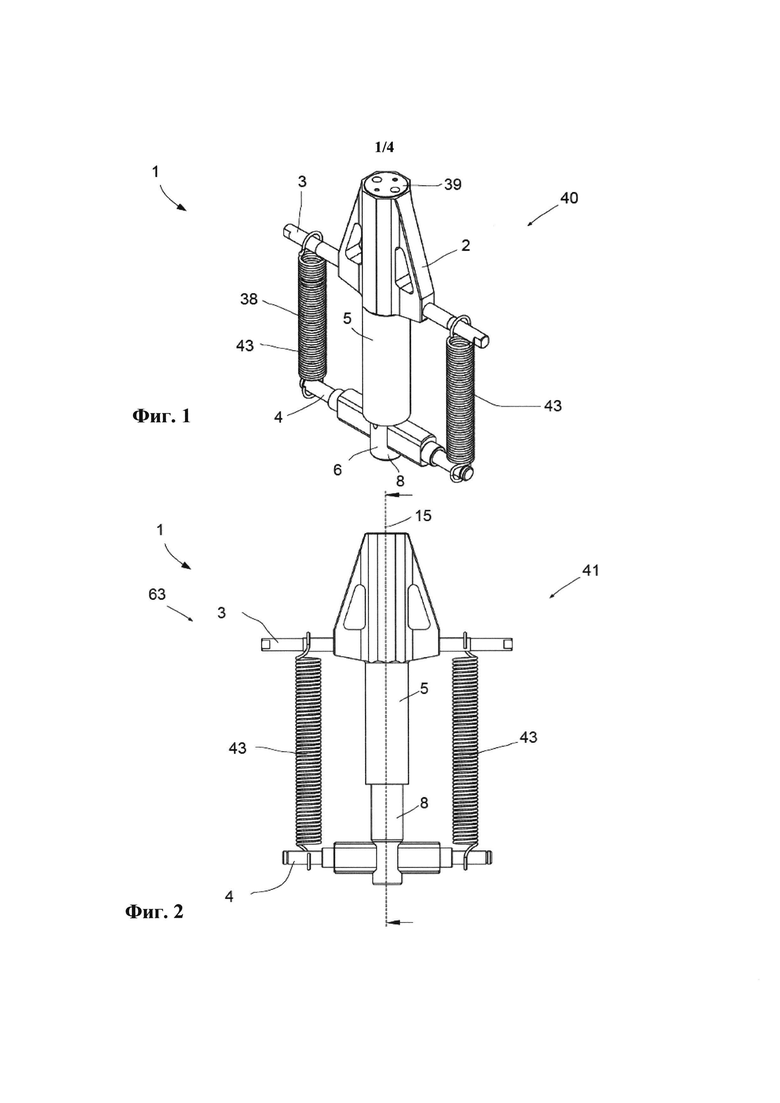
на фиг. 1 представлен схематический вид в перспективе предлагаемого узла;
на фиг. 2 представлен вид спереди узла, изображенного на фиг. 1;
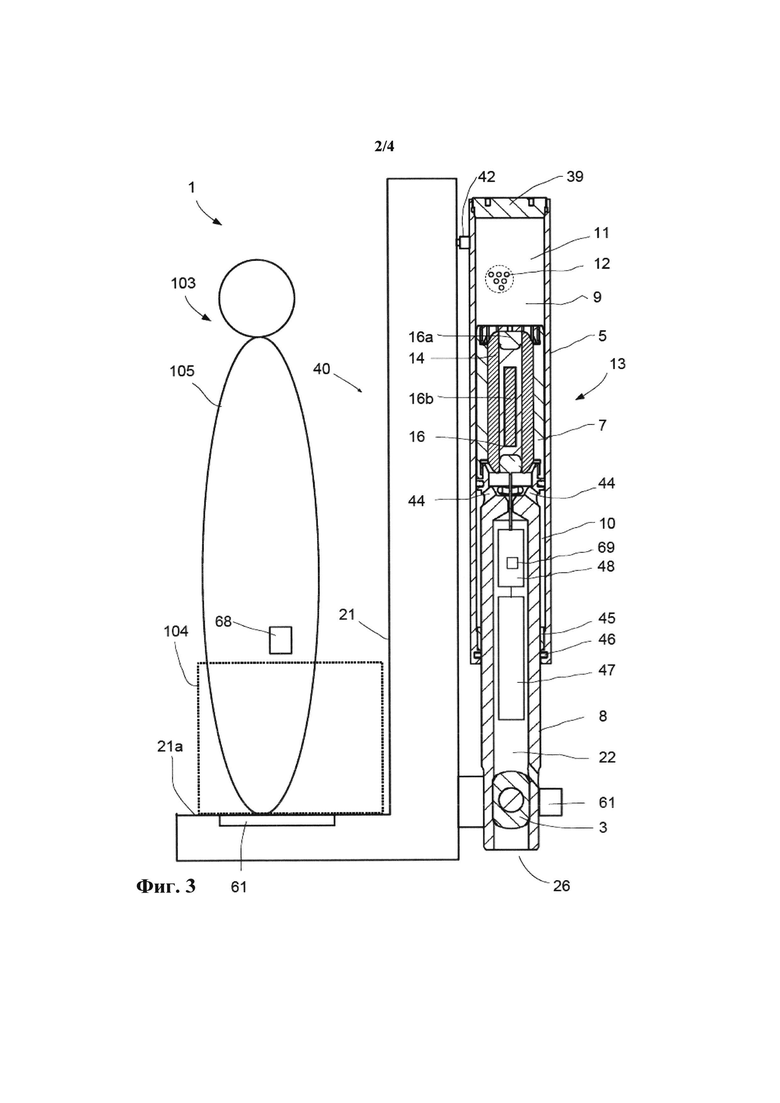
на фиг. 3 представлен вид сбоку в разрезе узла, изображенного на фиг. 1, в состоянии демпфирования;
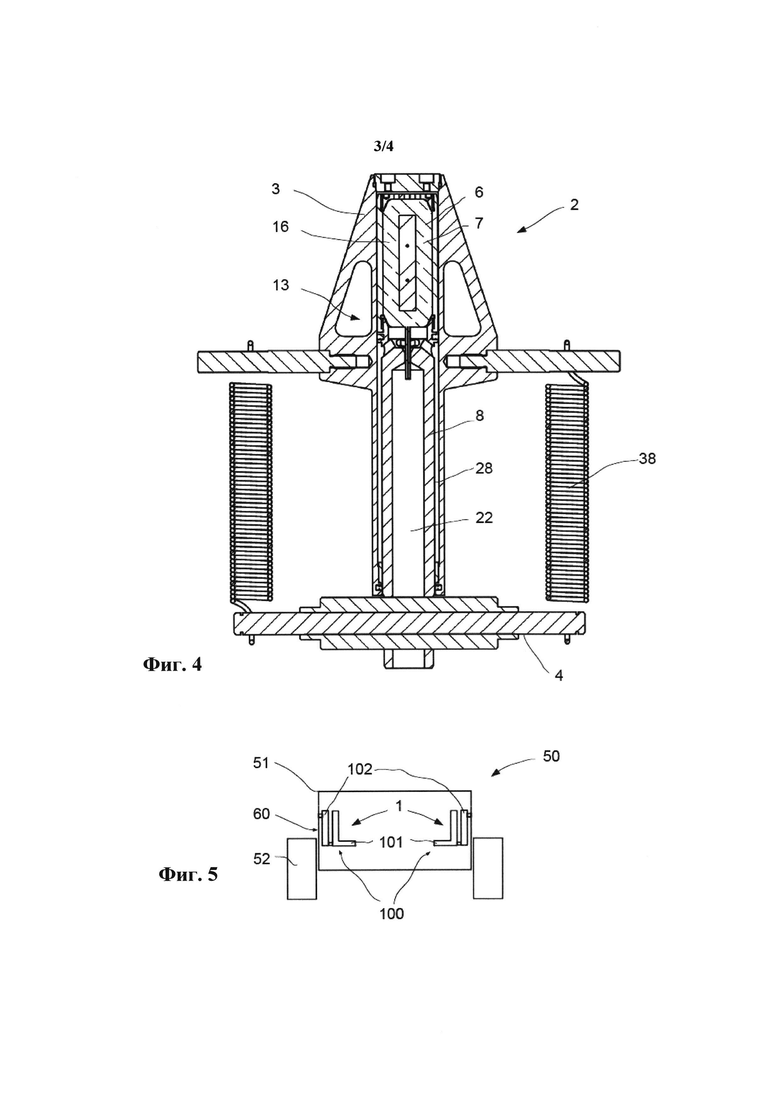
на фиг. 4 представлен вид спереди в разрезе узла, изображенного на фиг. 1, в состоянии покоя;
на фиг. 5 представлено транспортное средство с предлагаемыми узлами для защиты пассажиров от взрывов;
на фиг. 6 представлены временные кривые нагрузки и кривые потока мощности во время события избыточной нагрузки.
На фиг. 1 представлен схематический вид в перспективе предлагаемого узла 1. Узел содержит цилиндр поглотителя, на одном конце которого установлено крепежное приспособление 3, а на другом конце - фиксирующее устройство 4. Каждое из фиксирующего устройства 4 и крепежного приспособления 3 содержит два выступающих в сторону плеча, между которыми установлена одна пружина 43 для предварительного напряжения каждого из устройств 38 для предварительного напряжения, которые предназначены для перемещения узла 1 обратно в состояние покоя 40 после события 63 избыточной нагрузки, которое также показано на фиг. 1.
Узел 1 служит для поглощения энергии или демпфирования относительных перемещений между крепежным приспособлением 3 и фиксирующим устройством 4. Для этого фиксирующее устройство 4 соединено с поршневым устройством 6 поглотителя энергии 2, при этом крепежное приспособление 3 жестко соединено с цилиндром 5 поглотителя. В верхнем конце узла расположена концевая крышка 39, которая закрывает и ограничивает вторую камеру, входящую в состав камеры 9 поглотителя, которая находится во внутреннем пространстве.
На фиг. 2 представлен вид спереди узла 1. Ось 15 симметрии, через которую проходит сечение, изображенное на фиг. 3, проходит через центр цилиндра 5 поглотителя и вдоль него.
На фиг. 3 представлено сечение, изображенное на фиг. 2, при этом узел находится в состоянии демпфирования 41. Кроме того, на фигуре представлено устройство 21 для сидения с поверхностью 21а для сидения, на которой может сидеть человек, например, солдат, перевозимый транспортером для личного состава.
Во внутреннем пространстве цилиндра 5 поглотителя можно распознать сечение поршня 7 поглотителя, соединенного со штоком 8 поршня поршневого устройства 6. Поршень 7 поглотителя разделяет камеру 9 поглотителя во внутреннем пространстве цилиндра 5 поглотителя на первую камеру 10 и вторую камеру 11. Вторая камера 11 ограничена снаружи концевой крышкой 39 и, в этом случае, герметично уплотнена.
В состоянии покоя первая камера 10, по меньшей мере, частично и, в частности, полностью заполнена жидкостью 12 поглотителя. При возникновении события 63 избыточной нагрузки шток 8 поршня выходит из цилиндра 5 поглотителя, в результате чего жидкость 12 поглотителя в первой камере 10 проходит через канал 14 поглотителя, выполненный в поршне 7 поглотителя, и попадает во вторую камеру 11. В состоянии покоя вторая камера 11 может быть частично заполнена жидкостью 12 поглотителя. Альтернативно, в состоянии покоя вторая камера 11 может быть лишь незначительно заполнена жидкостью 12 поглотителя или быть заполнена только воздухом или другим сжимаемым газом или средой.
На фигуре отчетливо видно, что шток 8 поршня характеризуется очень большим диаметром, так что лишь сравнительно узкий кольцевой зазор вокруг штока поршня остается для первой камеры 10. Благодаря этому перемещение поршня 7 поглотителя вызывает вытеснение относительно небольшого объема жидкости 12 поглотителя из первой камеры 10. Следовательно, значения расхода жидкости 12 поглотителя в канале 14 поглотителя остаются низкими даже в случае возникновения событий 63 избыточной нагрузки, вызванных взрывами, так что длина поршня 7 поглотителя является достаточной для оказания необходимого воздействия на поток при помощи магнитного поля электропроводящей катушки, действующей в качестве генерирующего поле устройства 16.
При создании потока жидкости 12 из первой камеры 10 во вторую камеру 11, указанная жидкость перемещается в направлении вовнутрь узла через радиальные проточные отверстия 44, которые проходят радиально под углом от наружной поверхности во внутреннее пространство. Из этого следует, что проточный канал или канал 14 поглотителя смещен ближе к центру цилиндра в радиальном направлении, чем первая камера 10. Это позволяет эффективно использовать внутреннее пространство поршня 7 поглотителя для генерирования необходимого магнитного поля, а также для размещения канала 14 поглотителя.
В этом случае шток 8 поршня выполнен значительно более толстым, чем необходимо исходя из требований устойчивости. Следовательно, шток 8 поршня характеризуется наличием свободного пространства 22, которое сконфигурировано в качестве глухого отверстия. Глухое отверстие 22 проходит от конца 26, противоположного поршню, в шток 8 поршня. Свободное пространство 22 может проходить лишь до начала поршня 7 поглотителя, в результате чего свободное пространство 22 проходит вдоль трех четвертей или более длины штока 8 поршня до поршня 7 поглотителя. Свободное пространство 22 может быть использовано исходя из его размеров. Устройство 48 управления и аккумулятор 47 энергии расположены в свободном пространстве 22. Устройство 48 управления соединено с электропроводящей катушкой 16 для того, чтобы управлять ее работой. Кроме того, устройство 48 управления соединено с измерительным устройством 61 для получения и обработки нагрузок, действующих на устройство 21 для сидения. Помимо измерительного устройства 61 могут быть предусмотрены дополнительные блоки 68 датчиков.
Аккумулятор 47 энергии обеспечивает то, что, даже в случае отказа системы питания, установленной на бору транспортного средства, узел 1 будет всегда выдавать необходимое количество энергии для управления поглотителем 2 энергии. Аккумулятор энергии может представлять собой конденсатор или аккумуляторную батарею.
В этом случае поршень 7 поглотителя не только отделяет первую камеру 10 от второй камеры 11, но также образует клапан 13 управления потоком, который может управляться устройством 48 управления.
На фиг. 4 представлено другое поперечное сечение узла 1, при этом устройство 38 для предварительного напряжения снова изображено в разрезе в качестве возвращающего устройства 43. Для ясности на фигуре не показаны аккумулятор 47 энергии и устройство 48 управления, расположенные в свободном пространстве 22. Первая камера 10 образует кольцевую камеру 28 вокруг штока 8 поршня. Радиальная протяженность кольцевой камеры 28 меньше толщины стенки полого штока 8 поршня.
На фиг. 5 представлено схематическое изображение транспортного средства 50, такого как транспортер для личного состава, которое оснащено узлами 1 в соответствии с настоящим изобретением для защиты пассажиров в случае взрывов. Транспортное средство 50 характеризуется наличием корпуса 51, к которому присоединены сиденья 60 с противоминной защитой в качестве узлов 1. Транспортное средство 50 может перемещаться при помощи колес с шинами 52. Во время события 63 избыточной нагрузки, такого как взрыв, транспортное средство 50 будет подброшено вверх, при этом устройства 21 для сидения узлов 1 подвергнутся демпфирующему перемещению, чтобы предотвратить поражение сидящих на них людей.
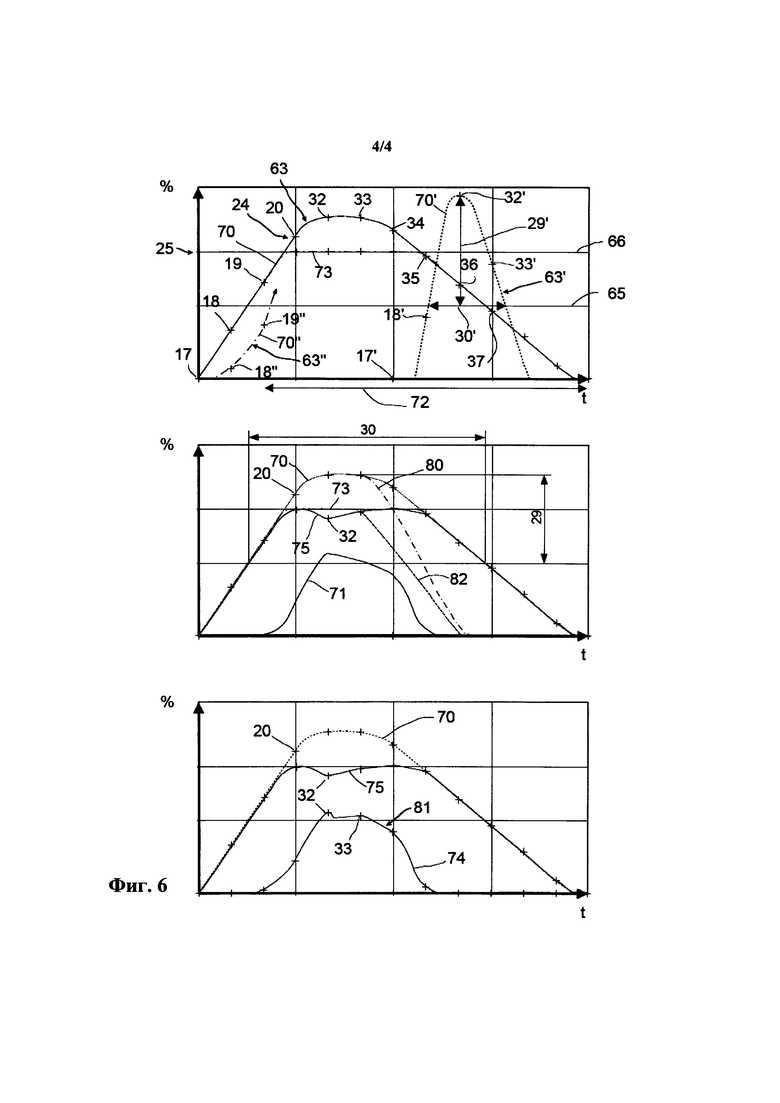
На фиг. 6 изображены три упрощенных графика, иллюстрирующие событие 63 избыточной нагрузки, при этом первый график, расположенный в верхней части фигуры, иллюстрирует изменение прогнозируемой кривой 70 нагрузки в динамике по времени. Кроме того, на этой фигуре изображена при помощи штрихпунктирных линий дополнительная независимая, вторая прогнозируемая кривая нагрузки, иллюстрирующая другое событие 63' избыточной нагрузки, а также показано начало третьего события 63'' избыточной нагрузки.
На графике, изображенном по центру фиг. 6, снова изображены прогнозируемая кривая 70 нагрузки (которая представляет приблизительный прогноз кривой нагрузки на недемпфированной стороне узла 1), а также соответствующая планируемая кривая 73 нагрузки (которая приблизительно представляет кривую нагрузки на демпфированной стороне узла 1) и соответствующая планируемая кривая 71 потока мощности.
На графике, изображенном в нижней части фиг. 6, изображены с использованием аналогичной временной шкалы изменения прогнозируемой кривой 70 нагрузки, фактической кривой 75 нагрузки и фактической кривой 74 потока мощности в динамике по времени.
Схематически проиллюстрированные случаи 63, 63' и 63'' избыточной нагрузки демонстрируют измеренные значения 17-20 и т.п., которые, например, периодически собирают с короткими временными интервалами, которые равны одной миллисекунде, десяти миллисекундам, или другими пригодными временными интервалами.
В момент времени 0 получают первое измеренное значение 17, когда нагрузка на грузовой блок 100 равняется нулю. Следующее измеренное значение 18 демонстрирует значительно увеличенную нагрузку, при этом измеренное значение 18 все еще ниже порогового значения 65, после которого осуществляют обнаружение события 63 избыточной нагрузки. Третье измеренное значение 19 находится выше порогового значения 65, в результате чего делают вывод о том, что имеет место 63 событие 63 избыточной нагрузки. После этого вычисляют прогнозируемую кривую 70 нагрузки, которая на данный момент определена при помощи измеренных значений 17, 18 и 19. Следовательно, измеренные значения могут быть далее экстраполированы при помощи линейного прогнозирования. В любом случае в кривую включают все измеренные значения, полученные после обнаружения события 63 избыточной нагрузки.
Альтернативно, возможно осуществить поиск в запоминающем устройстве 69 известных кривых для этих случаев избыточной нагрузки и подобрать подходящую кривую нагрузки для прогнозируемой кривой 70 нагрузки.
На данной стадии предполагается, что прогнозируемая кривая 70 нагрузки принята такой, как изображена на верхнем графике на фиг. 6. Как изображено на фигуре, прогнозируемая кривая 70 нагрузки выходит за пределы заданного характеристического значения 25 и предельной нагрузки 66, которые в настоящий момент идентичны, для объектов 103, транспортируемых в приемном блоке 101 грузового блока 100. Этот прогнозируемый период 72 времени проходит от момента времени для измеренного значения 19 до конца графика (спустя приблизительно десять одиночных интервалов времени).
Грузовой блок 100, в частности, служит в качестве сиденья с противоминной защитой, содержащего устройство 21 для сидения, поверхность 21а для сидения которого служит для транспортировки пассажира 105 или человека, сидящего на нем. Следовательно, грузовой блок 100 может быть использован в транспортерах для личного состава, вертолетах или других транспортных средствах.
Поскольку прогнозируемая кривая 70 нагрузки выходит за границы предельной нагрузки 66, выше которой следует ожидать или опасаться повреждения перевозимого объекта 103, устройство 48 управления принимает контрмеры, чтобы получить планируемую кривую 73 нагрузки. Следовательно, происходит соответствующее демпфирование движения приемного блока 101. Для того чтобы получить желаемый результат и, следовательно, планируемую кривую 73 нагрузки, поглотитель энергии 2 демпфируют соответствующим образом. Для этого поток мощности подают в блок 16 генерирования магнитного поля и, в частности, на электропроводящую катушку 16а, чтобы получить планируемую кривую 73 нагрузки, которая не превышает предельную нагрузку 66.
Существует возможность не определять или не вычислять прогнозируемую кривую нагрузки 70 до тех пор, пока, например, не произойдет срезание срезного устройства 42, а именно срезного болта, входящего в состав срезного устройства 42, что рассматривается в качестве исходного сигнала для процессов управления. Альтернативно, существует возможность постоянно получать измеренные значения 17-20 и т.п., а также постоянно вычислять прогнозируемые кривые нагрузки для готовности к событию 63 избыточной нагрузки в любой момент времени.
Кроме того, возможно и предпочтительно получать прогнозируемые характеристические значения 24 постоянно или при определенных условиях, когда прогнозируемое характеристическое значение 24 определяют для измеренного значения 20, например, следующего за двумя или тремя, или более измеренными значениями 17, 18 и 19. Если прогнозируемое характеристическое значение 24 превышает заданный уровень 65 или 66, то это указывает на начало события 63 избыточной нагрузки и, следовательно, выполняют определение соответствующей прогнозируемой кривой 70 нагрузки.
При получении кривой нагрузки и опасного уровня такой нагрузки, будет учитываться, в частности, не только уровень эффективного усилия или эффективного ускорения, но также уровень 29 нагрузки и продолжительность 30 нагрузки. Следует отметить, что высокие кратковременные нагрузки могут переноситься лучше, чем более низкие нагрузки с большей длительностью, по меньшей мере, если такие нагрузки достигают определенного уровня, но не превышают определенных пороговых значений.
Во всех случаях чрезвычайно предпочтительно использовать импульс, действующий на объект 103, в качестве основы действующей нагрузки. Кроме того, могут быть учтены дополнительные измеренные значения.
Прогнозируемые кривые 70, 70' и 70'' нагрузки, изображенные на верхнем графике, представленном на фиг. 6, демонстрируют различия в уровне, а также в продолжительности 30 соответствующей нагрузки. Таким образом, событие 63' избыточной нагрузки демонстрирует значительно более короткую продолжительность 30' наряду с более высокой амплитудой 29', по сравнению с соответствующими значениями события 63 избыточной нагрузки.
На центральном графике, изображенном на фиг. 6, представлены кривая нагрузки 70, изначально прогнозируемая при обнаружении события 63 избыточной нагрузки, и дополнительная планируемая кривая нагрузки 73, которая не превышает предельную нагрузку 66. Кроме того, сплошной линией на графике отмечена фактическая кривая 75 нагрузки, которая получена в результате регулировки в процессе работы. Наконец, на центральном графике, изображенном на фиг. 6, представлена планируемая кривая 71 потока мощности, которая подобрана для демпфирования прогнозируемой кривой 70 нагрузки таким образом, чтобы получить планируемую кривую 73 нагрузки. В начале подача потока мощности не требуется. После обнаружения события 63 избыточной нагрузки поток мощности увеличивают с тем, чтобы планируемая кривая 73 нагрузки не выходила за границы предельной нагрузки 66.
Во время работы может иметь место отклонение фактической кривой 75 нагрузки от планируемой кривой 73 нагрузки. Это продемонстрировано при помощи измеренного значения 32, которое находится заметно ниже запланированного значения нагрузки. Система управления предпримет контрмеры и направит в блок 16 генерирования магнитного поля поток мощности, отклоняющийся от планируемой кривой 71 потока мощности, чтобы снова получить планируемую кривую 73 нагрузки или приблизиться к ней.
Во время события 63 избыточной нагрузки может иметь место отклонение фактической кривой 75 нагрузки от прогнозируемой кривой 70 нагрузки. В частности, также возможно незначительное или существенное отклонение исходно прогнозируемой кривой 70 нагрузки от реальной нагрузки. При этом способ в процессе осуществления своих стадий предпочтительно проверяет, приводят ли самые последние измеренные значения (например, 32, 33 или 34-37) к измененному прогнозу в отношении кривой нагрузки. Следовательно, может быть полученная новая и прогнозируемая на данный момент кривая 80 нагрузки, которая незначительно или существенно отклоняется от исходно прогнозируемой кривой 70 нагрузки. В результате этого выполняют соответствующую адаптацию планируемой на данный момент кривой 82 нагрузки, которая, в свою очередь, может отчетливо отличаться от исходно планируемой кривой 73 нагрузки.
На нижнем графике, представленном на фиг. 6, представлены исходно прогнозируемая кривая 70 нагрузки, а также фактическая кривая 75 нагрузки. Кроме того, на графике отображена фактически спланированная или фактически реализованная кривая 81 потока мощности. Поскольку в момент получения измеренного значения 32 фактическая нагрузка ниже планированной нагрузки, фактический поток 74 мощности последовательно снижают таким образом, чтобы фактическая кривая 75 нагрузки снова приблизительно соответствовала планируемой кривой 73 нагрузки. Как видно из сравнения характеристик исходно планируемой кривой 71 потока мощности и фактической кривой 81 потока мощности, отклонения в характеристиках кривых могут иметь место в различные периоды времени. В этом случае, система управления сохранит направленность планируемой кривой нагрузки 73 или кривой 81. В последствии планируемая кривая нагрузки может быть обновлена периодически или на постоянной основе.
Во всех конкретных вариантах осуществления и конфигурациях, представленных в настоящем документе, термины «прогнозируемая кривая нагрузки», «планируемая кривая нагрузки», «планируемая кривая потока мощности», «планируемая кривая нагрузки», «фактическая кривая нагрузки», «прогнозируемая на данный момент кривая нагрузки», «планируемая на данный момент кривая потока мощности» и «планируемая на данный момент кривая нагрузки» являются определенными, фиксированными терминами, каждый из которых определяет характеристики кривых и позволяет отличить их друг от друга. Аналогично, термины «прогнозируемое время» и «текущий поток мощности» являются однозначными определениями терминов.
Группа изобретений относится к способу поглощения или рассеивания энергии для демпфирования нагрузок. Поглотитель (2) энергии действует между приемным блоком (101) и несущим устройством (102). На поглощающую способность поглотителя (2) энергии может воздействовать электрически управляемый блок (16) генерирования магнитного поля. Измеренные значения (17-20) нагрузок (80) последовательно собирают при помощи измерительного устройства (61). Событие (63) избыточной нагрузки обнаруживают, когда величина (24), полученная на основании измеренных значений (17-20), превышает заданное пороговое значение (65). После того как событие (63) избыточной нагрузки было обнаружено, оценивают прогнозируемую кривую (70) нагрузки на грузовой блок (100) на основании множества измеренных значений (19-20). Затем определяют планируемую кривую (17) потока мощности для блока (16) генерирования магнитного поля, который осуществляет динамическое демпфирование прогнозируемой кривой (70) нагрузки. Потоком мощности через блок (16) генерирования магнитного поля управляют динамически при помощи планируемой кривой (71) потока мощности. Достигается повышение защиты от повреждений перевозимых объектов. 2 н. и 17 з.п. ф-лы, 6 ил.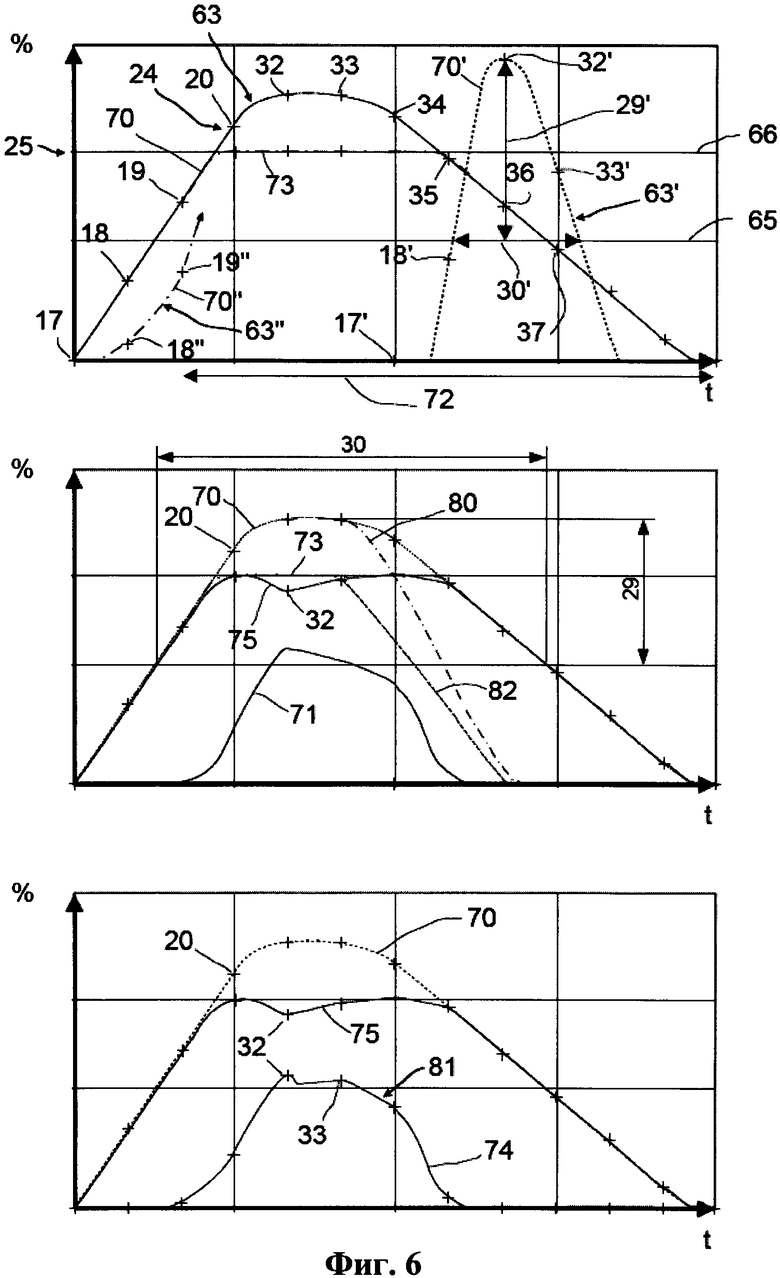
1. Способ управления поглотителем (2) энергии в грузовом блоке (100), по меньшей мере, во время события (63) избыточной нагрузки для снижения нагрузок, действующих на объект (103), перевозимый в грузовом блоке (100),
при этом поглотитель (2) энергии выполнен с возможностью поглощения энергии во время одиночного события избыточной нагрузки, характеризующегося настолько высоким выделением энергии, что без поглотителя энергии объект, защищаемый во время перевозки в грузовом блоке (100), будет с высокой вероятностью поврежден, чтобы посредством выполняемого им поглощения энергии снизить нагрузки, воздействующие на объект в результате события избыточной нагрузки, и
поглотитель (2) энергии действует между приемным блоком (101), предназначенным для приема объектов (103) для перемещения, и несущим устройством (102), предназначенным для соединения с транспортным средством (50), причем на поглощающую способность поглотителя (2) энергии может воздействовать электрически управляемый блок (16) генерирования магнитного поля, при этом указанный способ включает следующие стадии, выполняемые в представленной ниже или другой целесообразной последовательности:
последовательный сбор измеренных значений (17-20) нагрузок (80), действующих на грузовой блок (100), при помощи измерительного устройства (61);
обнаружение события (63) избыточной нагрузки, если величина (24), полученная на основании измеренных значений (17-20), превышает заданное пороговое значение (65);
после начала события (63) избыточной нагрузки осуществление оценки прогнозируемой кривой (70) нагрузки на грузовой блок (100) исходя из множества измеренных значений (19-20), которые собраны, по существу, после начала события избыточной нагрузки;
определение планируемой кривой (71) потока мощности для блока (16) генерирования магнитного поля, при помощи которого осуществляют динамическое демпфирование прогнозируемой кривой (70) нагрузки с тем, чтобы получить в результате планируемую кривую нагрузки, которая не выходит за границы заданной предельной нагрузки (66);
динамическое управление потоком мощности через блок (16) генерирования магнитного поля в соответствии с планируемой кривой (71) потока мощности.
2. Способ по п.1, в котором планируемую кривую (71) потока мощности определяют таким образом, чтобы значение DRI (динамический коэффициент чувствительности) в планируемой кривой нагрузки не превышало заданный уровень.
3. Способ по любому из пп.1 и 2, в котором учитывают массу объекта (103).
4. Способ по любому из пп.1 и 2, в котором планируемую кривую (71) потока мощности определяют с тем, чтобы динамически демпфировать прогнозируемую кривую (70) нагрузки так, чтобы планируемая (73) кривая нагрузки не превышала предельную нагрузку (66).
5. Способ по любому из пп.1 и 2, в котором текущие измеренные значения (33-37) используют для определения текущей нагрузки (74) и текущий поток мощности (74) адаптируют таким образом, чтобы обеспечить получение планируемой кривой (73) нагрузки.
6. Способ по любому из пп.1 и 2, в котором событие (63) избыточной нагрузки обнаруживают, если по меньшей мере одно измеренное значение (17-20) превышает заданное пороговое значение (65).
7. Способ по любому из пп.1 и 2, в котором прогнозируемое характеристическое значение (24) получают на основании измеренных значений и событие (63) избыточной нагрузки обнаруживают, если прогнозируемое характеристическое значение (24) превышает заданное характеристическое значение (25).
8. Способ по любому из пп.1 и 2, в котором после обнаружения события (63) избыточной нагрузки периодически собирают измеренные значения (33-37), на основании которых оценивают текущую прогнозируемую кривую (80) нагрузки для определения будущей нагрузки на грузовой блок (100).
9. Способ по п.8, в котором текущую планируемую кривую (81) потока мощности периодически определяют при помощи текущей прогнозируемой кривой (80) нагрузки.
10. Способ по п.9, в котором возможность повреждения определяют при помощи текущей прогнозируемой кривой (80) нагрузки, которая показывает предполагаемое повреждение объектов (103), перевозимых в грузовом блоке (100).
11. Способ по любому из пп.1-2, 9-10, в котором периодически определяют планируемую на данный момент кривую (71) потока мощности с тем, чтобы динамически демпфировать прогнозируемую на данный момент кривую нагрузки таким образом, чтобы получить планируемую на данный момент кривую нагрузки или приблизиться к ней.
12. Способ по любому из пп.1-2, 9-10, в котором измеренные значения (33-37) собирают при помощи двух или более датчиков (61, 68).
13. Способ по любому из пп.1-2, 9-10, в котором измеренные значения (33-37) относятся к нагрузке, действующей на грузовой блок (100), несущее устройство (101), транспортное средство (50), ускорению и/или давлению воздуха.
14. Способ по любому из пп.1-2, 9-10, в котором устройство (48) управления обнаруживает событие (63) избыточной нагрузки, когда датчик срезывания обнаруживает срезывание срезного устройства (42).
15. Способ по любому из пп.1-2, 9-10, в котором допустимую предельную нагрузку устанавливают исходя из возможностей среднестатистического человека.
16. Способ по любому из пп.1-2, 9-10, в котором учитывают показание, поступающее от блока (68) датчиков, расположенного на человеке.
17. Способ по любому из пп.1-2, 9-10, в котором грузовой блок (100) соединяют с измерительным приспособлением (61), при помощи которого может быть получена масса перевозимого человека и/или ускорение грузового блока (100).
18. Способ по любому из пп.1-2, 9-10, в котором поглотитель (2) энергии оснащен клапаном (13) поглотителя, демпфирующей способностью которого управляют при помощи интенсивности прикладываемого магнитного поля.
19. Грузовой блок (100), характеризующийся наличием приемного блока (101), предназначенного для приема объектов (103), предназначенных для перевозки, и несущего устройства (102), предназначенного для соединения с транспортным средством (50) и поглотителем (2) энергии, расположенным между грузовым блоком и несущим устройством (102), при этом поглотитель (2) энергии служит для демпфирования нагрузок, действующих во время события избыточной нагрузки,
причем поглотитель (2) энергии выполнен с возможностью и настроен для поглощения энергии во время одиночного события избыточной нагрузки, характеризующегося настолько высоким выделением энергии, что без поглотителя энергии объект, перевозимый в грузовом блоке (100), будет с высокой вероятностью поврежден, чтобы посредством выполняемого им поглощения энергии снизить нагрузки, действующие на перевозимый объект в результате события избыточной нагрузки, и
на поглощающую способность поглотителя (2) энергии может воздействовать электрически управляемый блок (16) генерирования магнитного поля, при этом предусмотрено устройство (48) управления, а также измерительное устройство (61) для сбора измеренных значений (17-20) нагрузок, действующих на грузовой блок (80), причем устройство управления настроено и сконфигурировано для обнаружения события (63) избыточной нагрузки, если величина (24), выведенная на основании измеренных значений (17-20), превышает заданное пороговое значение (65), причем устройство управления настроено и сконфигурировано для оценки, после начала события (63) избыточной нагрузки, исходя из множества измеренных значений (19-20), полученных, по существу, после начала события избыточной нагрузки, прогнозируемой кривой (70) нагрузки на грузовой блок (100), причем устройство управления настроено и сконфигурировано для получения планируемой кривой (71) потока мощности для блока (16) генерирования магнитного поля, посредством которого происходит динамическое демпфирование прогнозируемой кривой (70) нагрузки с тем, чтобы получить планируемую кривую нагрузки, которая не выходит за границы заданного порогового значения, причем устройство управления настроено и сконфигурировано для динамического управления потоком мощности через блок (16) генерирования магнитного поля в соответствии с планируемой кривой (71) потока мощности.
| US 2008156602 A1, 03.07.2008 | |||
| US 2010230989 A1, 16.09.2010 | |||
| WO 2011141164 A1, 17.11.2011 | |||
| DE 102010020086 A1, 10.11.2011. |

