СМЕЖНЫЕ ЗАЯВКИ
[0001] Настоящая заявка испрашивает приоритет по предварительной заявке на патент США №62/599,616 под названием «Orthopedic Adapter for an Electric Impacting Tool», поданной 15 декабря 2017 г; и является частичным продолжением заявки на патент США №15/939,048 под названием «Orthopedic Adapter for an Electric Impacting Tool», поданной 28 марта 2018 г. Настоящая заявка связана со следующими предшествующими заявками на патенты, относящимися к ортопедические импактным устройствам: заявка на патент США №12/980,329, озаглавленная «Electric Motor Driven Tool for Orthopedic Impacting», поданная 29 декабря 2010 г., в настоящее время патент США №8,695,726; заявка на патент США №13/466,870, озаглавленная «Electric Motor Driven Tool for Orthopedic Impacting», поданная 8 мая 2012 г., в настоящее время патент США №8,393,409; заявка на патент США №13/790,870, озаглавленная «Electric Motor Driven Tool for Orthopedic Impacting», поданная 8 марта 2013 г., в настоящее время патент США №8,602,124; заявка на патент США №14/250,102, озаглавленная «Electric Motor Driven Tool for Orthopedic Impacting», поданная 10 апреля 2014 г., в настоящее время патент США №9,901,354; заявка на патент США №14/332,767, озаглавленная «Electric Motor Driven Tool for Orthopedic Impacting», поданная 16 июля 2014 г., в настоящее время патент США №8,936,105; заявка на патент США №14/332,790, озаглавленная «Electric Motor Driven Tool for Orthopedic Impacting», поданная 16 июля 2014 г., в настоящее время патент США №8,936,106; заявка на патент США №14/850,588, озаглавленная «Electric Motor Driven Tool for Orthopedic Impacting», поданная 10 сентября 2015 г.; заявка на патент США №14/850,620, озаглавленная «Electric Motor Driven Tool for Orthopedic Impacting», поданная 10 сентября 2015 г.; заявка на патент США №14/850,639, озаглавленная «Electric Motor Driven Tool for Orthopedic Impacting», поданная 10 сентября 2015 г.; заявка на патент США №14/850,660, озаглавленная «Electric Motor Driven Tool for Orthopedic Impacting», поданная 10 сентября 2015 г.; заявка на патент США №14/850,674, озаглавленная «Electric Motor Driven Tool for Orthopedic Impacting», поданная 10 сентября 2015 г.; заявка на патент США №14/850,695, озаглавленная «Electric Motor Driven Tool for Orthopedic Impacting», поданная 10 сентября 2015 г.; заявка на патент США №14/992,781, озаглавленная «Electric Motor Driven Tool for Orthopedic Impacting», поданная 11 января 2016 г.; заявка на патент США №15/009,723, озаглавленная «Battery Enclosure for Sterilizeable Surgical Tools Having Thermal Insulation», поданная 28 января 2016 г.; заявка на патент США №15/098,662, озаглавленная «Electric Motor Driven Tool for Orthopedic Impacting», поданная 14 апреля 2016 г.; заявка на патент США №15/439,692, озаглавленная «Orthopedic Impacting Device Having a Launched Mass Delivering a Controlled, Repeatable & Reversible Impacting Force», поданная 22 февраля 2017 г; заявка на патент США №15/446,862, озаглавленная «Orthopedic Impacting Delivering a Controlled, Repeatable Impact», поданная 1 марта 2017 г.; заявка на патент США №15/544,317, озаглавленная «Battery Enclosure for Steri1izeable Surgical Tools Having Thermal Insulations, поданная 18 июля 2017 г.; заявка на патент США №15/600,234, озаглавленная «Orthopedic Impacting Delivering а Controlled, Repeatable Impact», поданная 19 мая 2017 г.; заявка на патент США №15/600,284, озаглавленная «Orthopedic Impacting Device Having a Launched Mass Delivering a Controlled, Repeatable & Reversible Impacting Force», поданная 19 мая 2017 г; заявка на патент США №15/677,933, озаглавленная «Electric Motor Driven Tool for Orthopedic Impacting», поданная 15 августа 2017 г.; заявка на патент США №15/789,493, озаглавленная «Orthopedic Impacting Device Having a Launched Mass Delivering a Controlled, Repeatable & Reversible Impacting Force», поданная 20 октября 2017 г; и заявка на патент США №15/857,385, озаглавленная «Electric Motor Driven Tool for Orthopedic Impacting», поданная 28 декабря 2017 г. Все вышеуказанные заявки полностью включены в настоящий документ путем ссылки.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
[0002] Настоящее описание относится к адаптерам для хирургических импактных инструментов с электрическим приводом, используемых в таких областях хирургии, как ортопедические процедуры, включая процедуры с применением электроприводного инструмента для двунаправленного хирургического импактного воздействия, осуществляемого выстреливаемой массой, с целью обеспечения контролируемых, воспроизводимых импактных воздействий на хирургическое приспособление.
[0003] В сфере ортопедии протезные устройства, такие как искусственные суставы, часто имплантируют или устанавливают в полость кости пациента. Полость, как правило, формируется во время хирургической операции до установки или имплантации протеза. Например, врач может удалить и/или уплотнить существующую костную массу для образования полости. Протез обычно включает в себя ножку или другой выступ, который вставляют в полость.
[0004] Для создания полости врач может использовать фрезу, соответствующую форме ножки протеза. Известные в данной области решения включают в себя обеспечение рукоятки с фрезой для ручного вбивания ее врачом во время хирургического вмешательства с целью проталкивания фрезы в область имплантации. К сожалению, такой подход является грубым и, что общеизвестно, неточным, приводя к ненужной механической нагрузке на кость. Результаты могут быть непредсказуемыми и могут зависеть от квалификации конкретного врача. Как показывает история, этот подход во многих случаях приводит к неточностям в расположении и конфигурации полости. Кроме того, хирургу необходимо прикладывать нетипичное количество физической силы и энергии для вбивания фрезы и манипулирования костями и протезом. Что наиболее важно, такой подход сопряжен с риском того, что врач вызовет ненужную дополнительную травму в операционном поле и повредит ткань, костную структуру и т.п., которая в ином случае осталась бы здоровой.
[0005] Другая методика создания полости для протеза заключается в пневматическом приведении в движение фрезы, то есть при помощи сжатого воздуха. Такой подход является неблагоприятным, вследствие того, что он лишает импактный инструмент портативности, например, из-за наличия присоединенной воздушной линии, а также вследствие выброса воздуха из инструмента в стерильное рабочее поле, также из-за утомляемости врача, работающего с инструментом. Такой подход, пример которого приведен в патенте США №5,057,112, не позволяет точно контролировать ударную силу или частоту, и вместо этого функционирует во многом подобно отбойному молотку. Кроме того, отсутствие какого-либо средства точного контроля затрудняет точное фрезерование полости и может привести к ненужным осложнениям и травмам у пациента. Эти типы инструментов могут создавать широкий диапазон движений, перпендикулярных оси резки, что дополнительно снижает правильность и точность. В некоторых случаях такая правильность и точность или их отсутствие могут быть количественно определены путем описания общего индикаторного показания (TIR) хирургического приспособления, соединенного с адаптером инструмента. Например, TIR представляет собой показатель, описывающий отклонение по контуру поверхности (например, плоской, цилиндрической и т.п.). В одном конкретном примере TIR адаптера может представлять собой «ровность» адаптера вдоль примера поверхности.
[0006] Третья методика основана на использовании для создания полости роботизированных манипуляторов с компьютерным управлением. Несмотря на то что этот подход позволяет преодолеть проблемы, связанные с утомляемостью и точностью, его недостатком являются очень высокие капитальные затраты и устранение тактильной обратной связи, которую хирург может получать при ручном подходе. Кроме того, если только данный подход не осуществляется путем фрезерования, он все равно требует импактного воздействия (пневматического, электрического или ручного).
[0007] В других методиках применяется собственная разработка автора настоящего изобретения, и они могут включать в себя способ выстреливания молотка, включающего в себя линейный компрессор, вакуумный привод или механическую или газовую пружину, все из которых имеют электропитание. Однако при использовании способа с выстреливанием молотка, применение существующих коммерческих адаптеров для передачи энергии удара, создаваемой выстреливаемой массой (молотком) или ударником, и поступающей от электроприводного импактора к хирургическому приспособлению, приводит к очень плохой передаче внутренней энергии к хирургическому приспособлению, и рои этом типичными являются потери 50% или более.
[0008] Следовательно, существует потребность в улучшенных адаптерах между импактными инструментами и хирургическими приспособлениями, которые позволяют преодолеть различные недостатки существующих адаптеров.
КРАТКОЕ ОПИСАНИЕ ИЛЛЮСТРАТИВНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0009] Учитывая вышеупомянутые недостатки, предлагаются адаптеры для электроприводного ортопедического импактного инструмента, обеспечивающие соединение хирургических приспособлений с инструментом, которые можно предоставить для ортопедического импактного воздействия в области бедер, коленей, плеч и т.п.Адаптер способен удерживать фрезу, долото или другой концевой эффектор и передавать энергию от импактора для аккуратного вбивания фрезы, долота или другого концевого эффектора в полость контролируемыми вибрационными ударами, что позволяет добиться лучшей посадки протеза или имплантата. Адаптер также можно использовать для установки и удаления фрез, имплантатов, чашек, прокладок, шаровых головок, гвоздей, проволок, штифтов и других устройств. Кроме того, адаптер может обеспечивать дополнительный контроль над электроприводным ортопедическим импактором путем передачи информации или иного указания параметров ударов в зависимости от пациента, хирургического приспособления или хирургического вмешательства. Адаптер дополнительно обеспечивает надлежащую посадку в полость для имплантата, а, в случае двунаправленного перемещения, и извлечение протеза или имплантата из полости, и преимущественно дополняет имеющиеся у хирурга навыки по управлению электроприводным ортопедическим импактором. Более конкретно в настоящем изобретении предлагается адаптер, выполненный с возможностью сопряжения хирургического приспособления с электроприводным хирургическим импактным инструментом, причем хирургический импактный инструмент включает в себя упор и выполнен с возможностью генерирования энергии для перемещения упора в прямом или обратном направлении вдоль оси упора, при этом адаптер содержит: поверхность для ударов в прямом направлении, выполненную с возможностью взаимодействия с предназначенной для ударов в прямом направлении поверхностью хирургического импактного инструмента; поверхность для ударов в обратном направлении, отличающуюся от поверхности для ударов в прямом направлении, выполненную с возможностью взаимодействия с предназначенной для ударов в обратном направлении поверхностью хирургического импактного инструмента, отличной от предназначенной для ударов в прямом направлении поверхности хирургического импактного инструмента; и первую поверхность, вторую поверхность и третью поверхность, при этом первая, вторая и третья поверхности образуют отдельные и соответствующие первую, вторую и третью плоскости, каждая из которых по существу параллельна оси упора, при этом первая поверхность, вторая поверхность и третья поверхность позволяют располагать адаптер по отношению к хирургическому импактному инструменту в отдельных и соответствующих первом, втором и третьем поворотных положениях вокруг оси упора; при этом поверхность для ударов в прямом направлении или поверхность для ударов в обратном направлении выполнена с возможностью входа в контакт с упором во время работы хирургического импактного инструмента и передачи импактного воздействия (ударной силы) через адаптер на хирургическое приспособление. В другом варианте предлагается адаптер, выполненный с возможностью сопряжения хирургического приспособления на переднем конце адаптера с электроприводным хирургическим импактором, причем хирургический импактор включает в себя упор и выполнен с возможностью генерирования энергии для перемещения упора вдоль оси упора, при этом адаптер содержит: поверхность, ориентированную по существу перпендикулярно оси упора и выполненную с возможностью приема ударной силы в первом направлении и передачи ее упору в первом направлении вдоль оси упора; и первую поверхность, вторую поверхность и третью поверхность, при этом первая, вторая и третья поверхности образуют отдельные и соответствующие первую, вторую и третью плоскости, каждая из которых по существу параллельна оси упора, при этом первая поверхность, вторая поверхность и третья поверхность позволяют располагать адаптер по отношению к хирургическому импактору в отдельных и соответствующих первом, втором и третьем поворотных положениях вокруг оси упора.
[0010] Для обеспечения контекста приведено краткое описание электроприводного ортопедического импактора (другие аналогичные и родственные устройства также описаны в смежных заявках, указанных выше и включенных в настоящий документ путем ссылки). Электроприводной ортопедический импактный инструмент включает в себя источник питания (такой как аккумуляторная батарея, топливный элемент или картридж сжатого газа), узел двигателя, контроллер, корпус, систему или механизм запасания энергии, такую как газовая или механическая пружина, выполненную с возможностью запасания и высвобождения потенциальной энергии, и ударник, получающий энергию от приводной системы запасания энергии для работы в прямом и/или обратном направлении, причем ударник выполнен с возможностью генерировать ударную силу в прямом или обратном направлении.
[0011] В одном из вариантов осуществления адаптер используется для передачи усилия между электроприводным импактором и хирургическим приспособлением. В дополнительном варианте осуществления адаптер имеет две отдельные поверхности, которые используются для передачи прямого или обратного импактного воздействия от электроприводного импактора (далее именуемого инструментом) к хирургическому приспособлению.
[0012] В одном варианте осуществления хирургическое приспособление может быть скомбинировано с адаптером.
[0013] В одном из вариантов осуществления адаптер передает на хирургическое приспособление по меньшей мере 50% энергии ударника.
[0014] В одном примере осуществления адаптер имеет обратное сообщение с инструментом независимо от того, выполняет ли хирург или робот проталкивание или вытягивание адаптера и хирургического приспособления к телу пациента или от него.
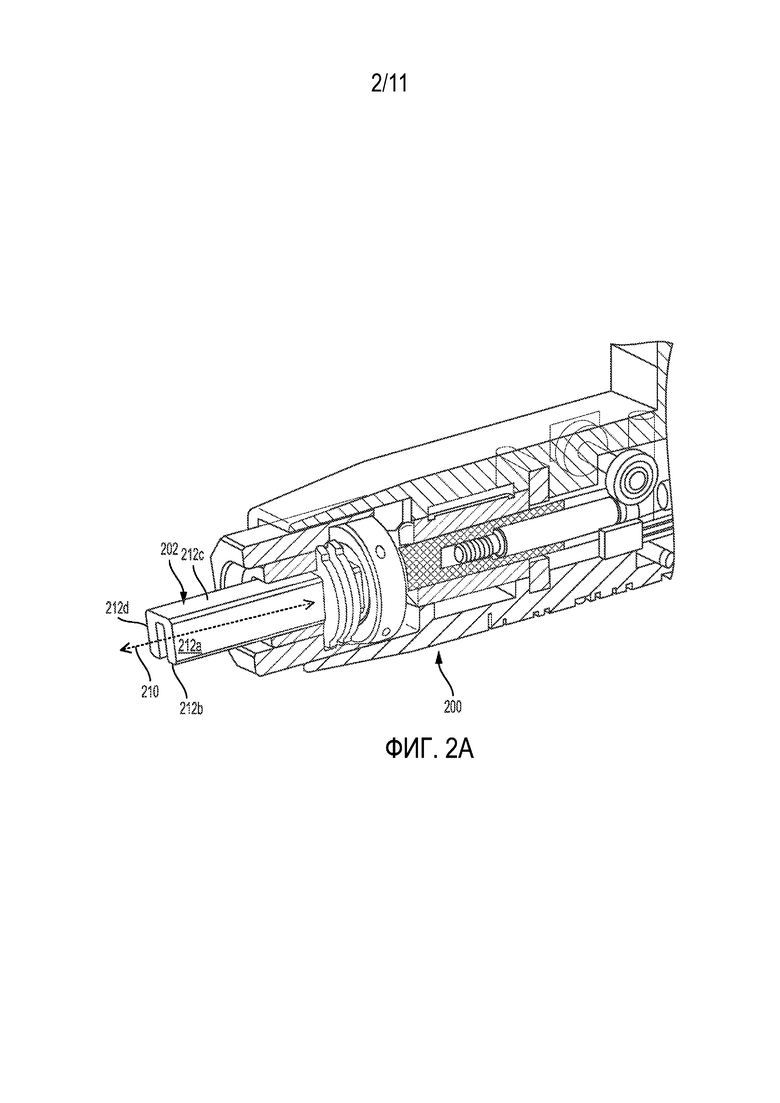
[0015] В дополнительном примере осуществления хирургическое приспособление (например, фреза, долото или другой концевой эффектор) можно поворачивать в несколько положений, сохраняя при этом осевое выравнивание, как показано, например, на ФИГ. 2А, где адаптер выполнен с возможностью поворота в четыре различных положения, причем каждое положение повернуто на 90°. Это облегчает использование адаптера или фрезы, например, в различных анатомических презентациях во время хирургической операции.
[0016] В некоторых вариантах осуществления адаптер выполнен с возможностью передачи информации о пространственном положении адаптера по отношению к пациенту. Например, адаптер или импактор может включать в себя датчик и/или камеру, передающую информацию об относительном положении и/или выравнивании инструмента относительно пациента. Это может быть достигнуто путем отслеживания контрольной точки, связанной с пациентом, и не размещенной на адаптере или импакторе. В дополнительном варианте осуществления датчик может быть выполнен с возможностью передачи положения адаптера или импактора в координации с хирургической навигационной системой для информирования хирурга или робота о позиции относительно оптимальной позиции, плановой конечной позиции или любой другой желаемой позиции.
[0017] В одном примере осуществления адаптер инструмента включает в себя по меньшей мере одну из двух точек удара, переднюю ударную поверхность или первую поверхность и заднюю ударную поверхность или вторую поверхность.
[0018] В одном примере осуществления упор и адаптер включают в себя один элемент, или один из них может быть выполнен за одно целое с другим.
[0019] В одном примере осуществления адаптер весит меньше, чем упор, ударник или другая выстреливаемая масса импактора.
[0020] В одном примере осуществления адаптер имеет массу, составляющую менее половины массы импактора, а предпочтительно, менее 40% массы импактора.
[0021] В одном примере осуществления адаптер по существу расположен в осевом направлении на одной линии с упором, ударником или другой выстреливаемой массой импактора. Это дает неожиданное преимущество, связанное с тем, что кость представляет собой анизотропный материал, который наиболее прочен в отношении усилий сжатия, затем растяжения, а затем сдвига. Если силы будут направлены вдоль линии, работа инструмента будет приводить к более низкой нагрузке на кость и давать лучшие результаты.
[0022] В одном примере осуществления адаптер может передавать параметры силы, частоты и выстреливания обратно к инструменту, в зависимости от хирургического приспособления или процедуры.
[0023] В одном примере осуществления адаптер может включать в себя демпфирующий механизм, например, вязкоупругий материал или эластомерную или механическую пружину, который ограничивает общую энергию, передаваемую от инструмента к хирургическому приспособлению. Демпфер может быть выбран или выполнен с возможностью обеспечения любых желаемых свойств, таких как определенный уровень демпфирования или демпфирование только в определенном направлении. Например, демпфер может уменьшать энергию удара от инструмента на 10% или 50%, предпочтительно, по меньшей мере на 20%, и демпфер может демпфировать энергию только в прямом направлении, сохраняя более резкую ударную силу в обратном направлении.
[0024] В одном примере осуществления адаптер может включать в себя механизм, генерирующий звуковой или визуальный сигнал, указывающий, что адаптер надлежащим образом соединен с инструментом. Например, язычки, канавки, приподнятые края и другие аналогичные элементы могут быть выполнены с возможностью защелкивания на месте и генерации звукового сигнала при надлежащем соединении адаптера с инструментом или хирургическим приспособлением. Визуальный сигнал также может показывать, что адаптер надлежащим образом соединен с инструментом или хирургическим приспособлением. Например, в окошке или другой специальной области на адаптере, инструменте или хирургическом приспособлении может отображаться красный цвет при неправильном присоединении адаптера, и зеленый цвет при правильном присоединении адаптера.
[0025] В одном примере осуществления адаптер может быть присоединен к хирургическому приспособлению, имеющему режущие зубцы, которые можно использовать для окончательного формирования кости перед размещением имплантата. В еще одном дополнительном варианте осуществления определено, что шаг режущих зубцов (разнесение в направлении удара) является меньшим, чем дистанция приводного выстреливания инструмента. В еще одном дополнительном варианте осуществления было обнаружено, что преимущественным является наличие двунаправленных режущих зубцов, которые обеспечивают формирование кости как при ударе в прямом направлении, так и при ударе в обратном направлении.
[0026] Эти, а также другие аспекты настоящего описания, вместе с различными признаками новизны, которые характеризуют настоящее изобретение, подробно указаны в приложенных к настоящему описанию пунктах формулы изобретения и являются частью настоящего описания. Для лучшего понимания настоящего описания, его эксплуатационных преимуществ и конкретных не имеющих ограничительного характера целей, достигнутых при его применении, следует обратиться к сопроводительным рисункам и подробному описанию, в которых проиллюстрированы и описаны примеры осуществления настоящего изобретения.
[0027] Следующее общее описание иллюстративных вариантов реализации и их дальнейшее детальное описание являются лишь иллюстративными примерами аспектов идей, представленных в настоящем описании, и не носят ограничительного характера.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0028] Прилагаемые чертежи, которые включены в описание и составляют его часть, иллюстрируют один или более вариантов осуществления, и вместе с описанием служат для объяснения этих вариантов осуществления. Сопроводительные чертежи не обязательно выполнены в масштабе. Любые значения размеров, показанные на прилагаемых графиках и фигурах, приведены только в качестве иллюстрации и могут или не могут представлять фактические или предпочтительные значения или размеры. В соответствующих случаях некоторые или все элементы могут быть не показаны, если это помогает в описании нижележащих элементов. Рассмотрим рисунки, на которых:
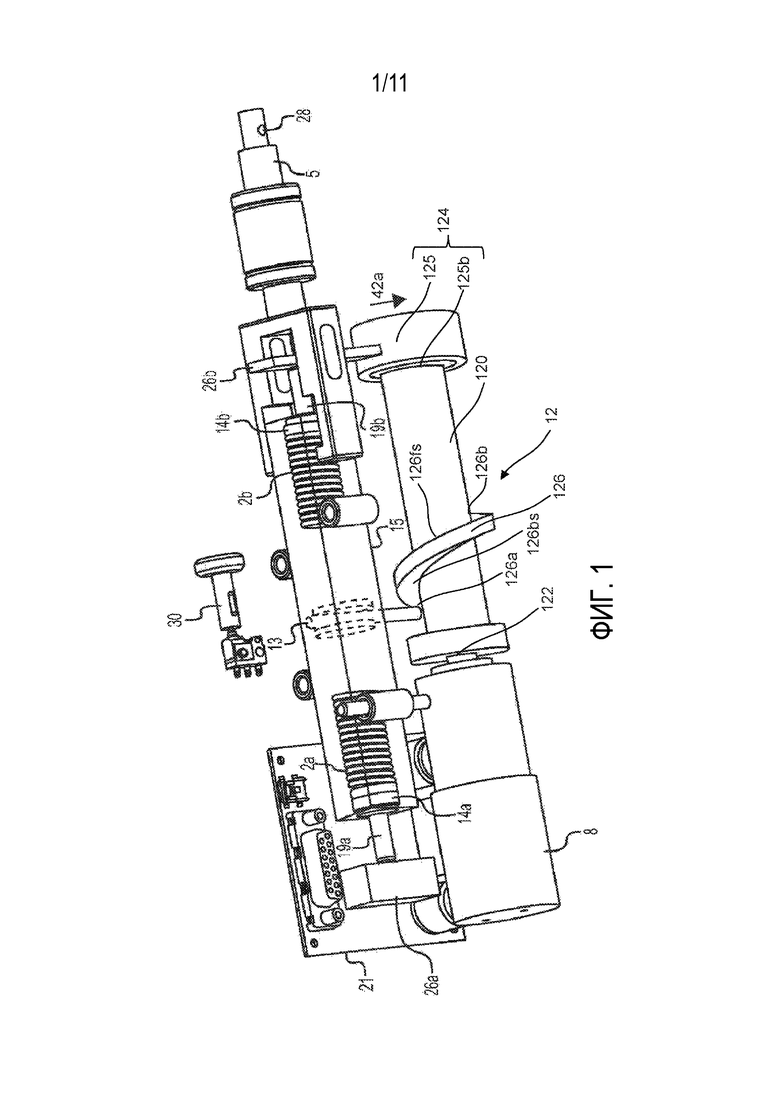
[0029] на ФИГ. 1 представлен вид в перспективе ортопедического импактного инструмента в соответствии с одним вариантом осуществления;
[0030] на ФИГ. 2А представлен вид примера адаптера с импактором, который имеет 4 разных степени поворота вокруг оси импактирования в соответствии с одним вариантом осуществления;
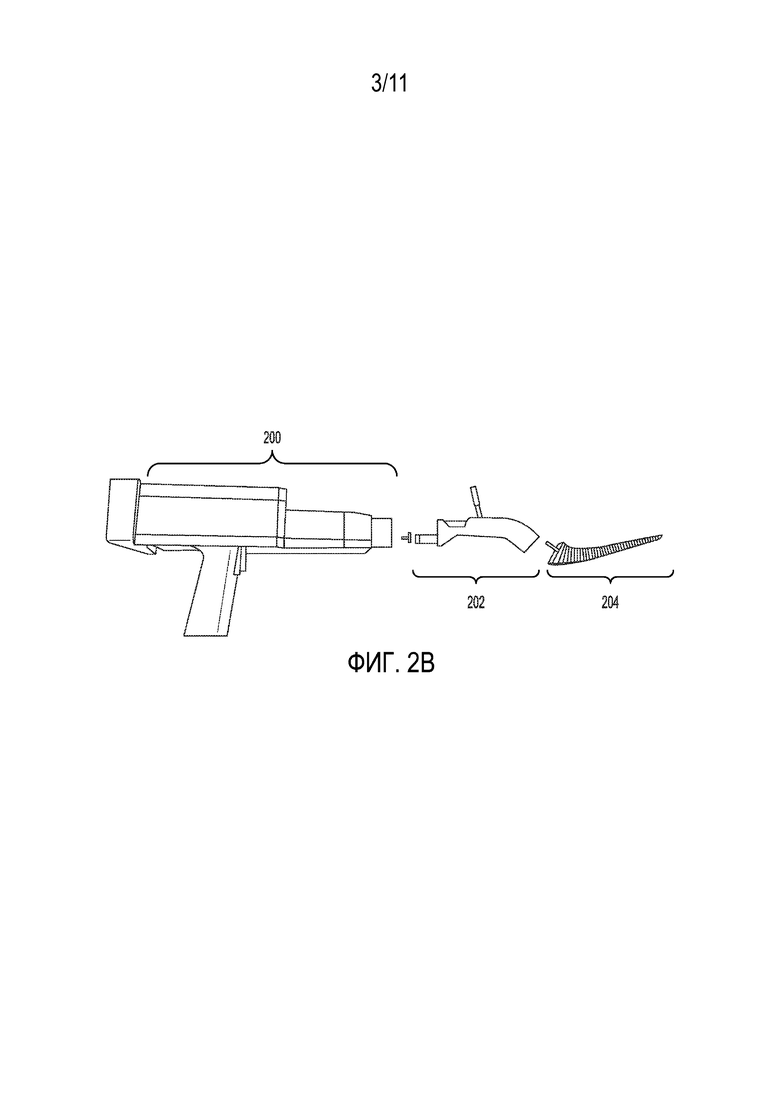
[0031] на ФИГ. 2В показан пример импактора, адаптера и хирургического приспособления в виде трех отдельных деталей в соответствии с одним вариантом осуществления;
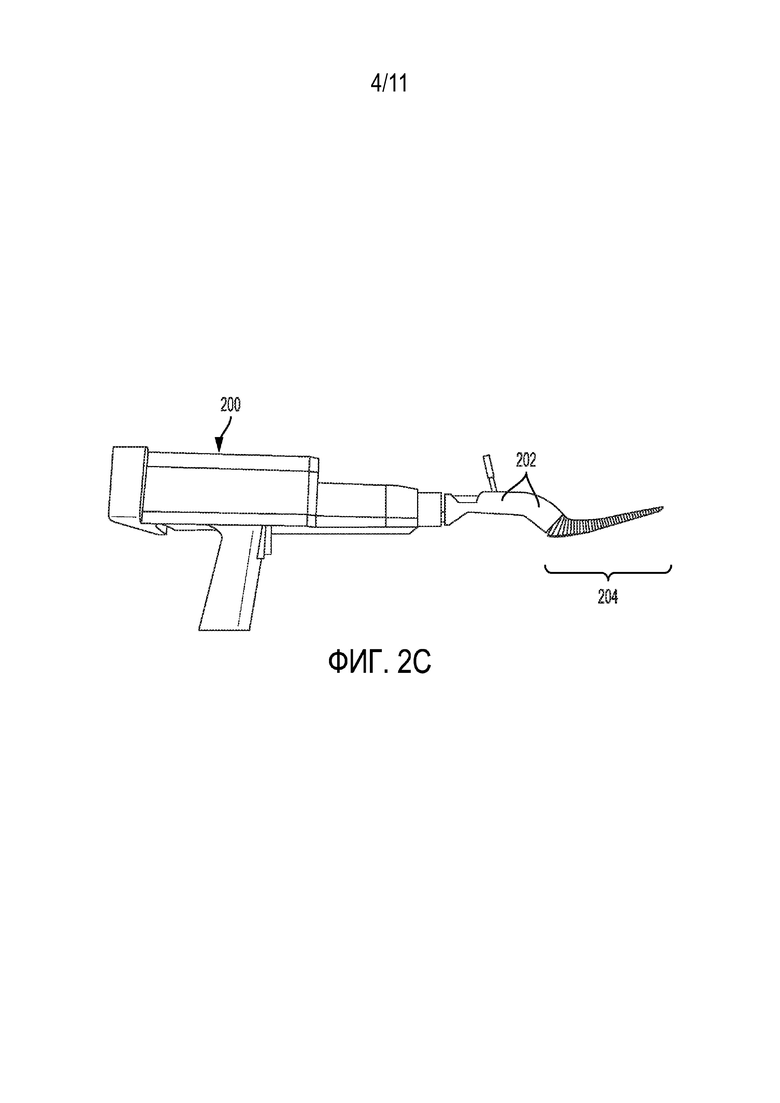
[0032] на ФИГ. 2С показан импактор, адаптер и присоединенное хирургическое приспособление, изображенное на ФИГ. 2В;
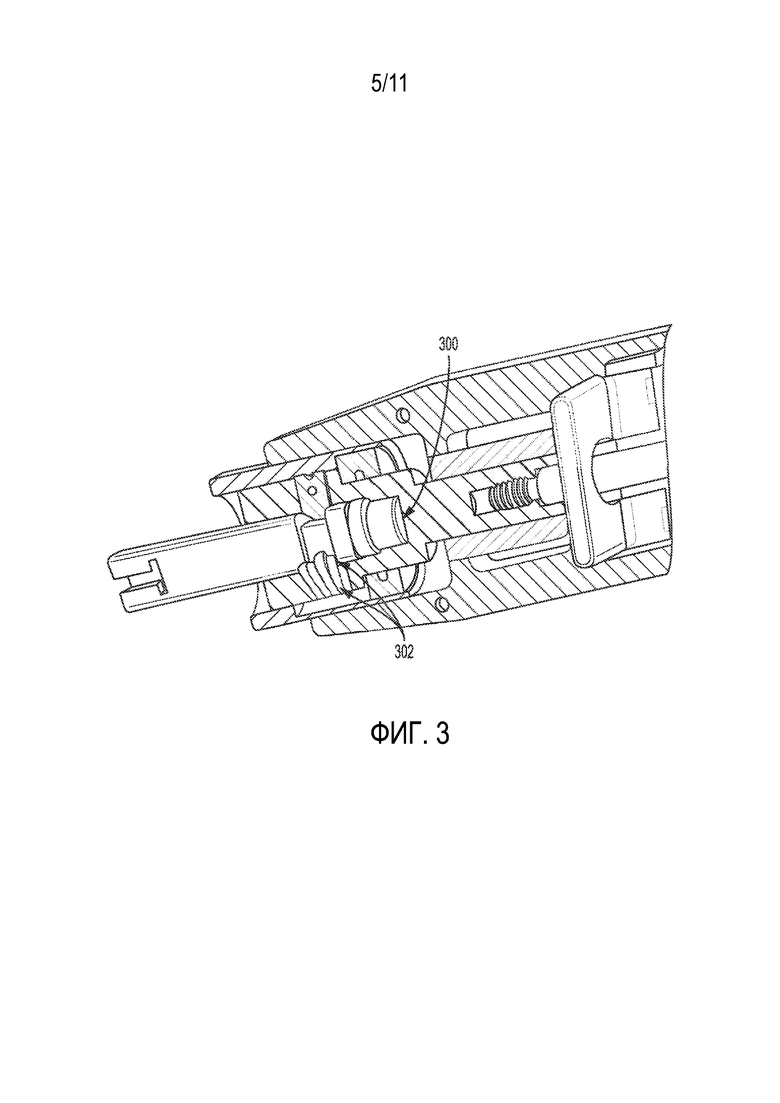
[0033] на ФИГ. 3 представлен вид импактора в поперечном сечении в соответствии с одним вариантом осуществления;
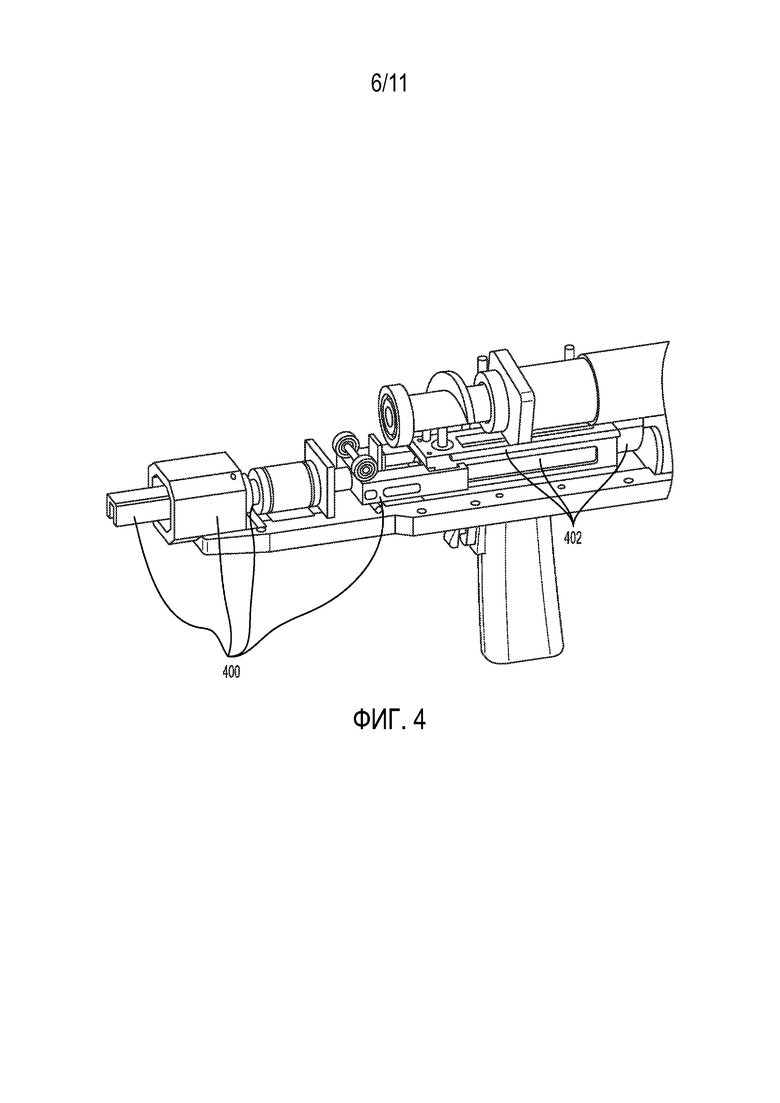
[0034] на ФИГ. 4 показаны примеры масс импактного инструмента для расчета массовых соотношений;
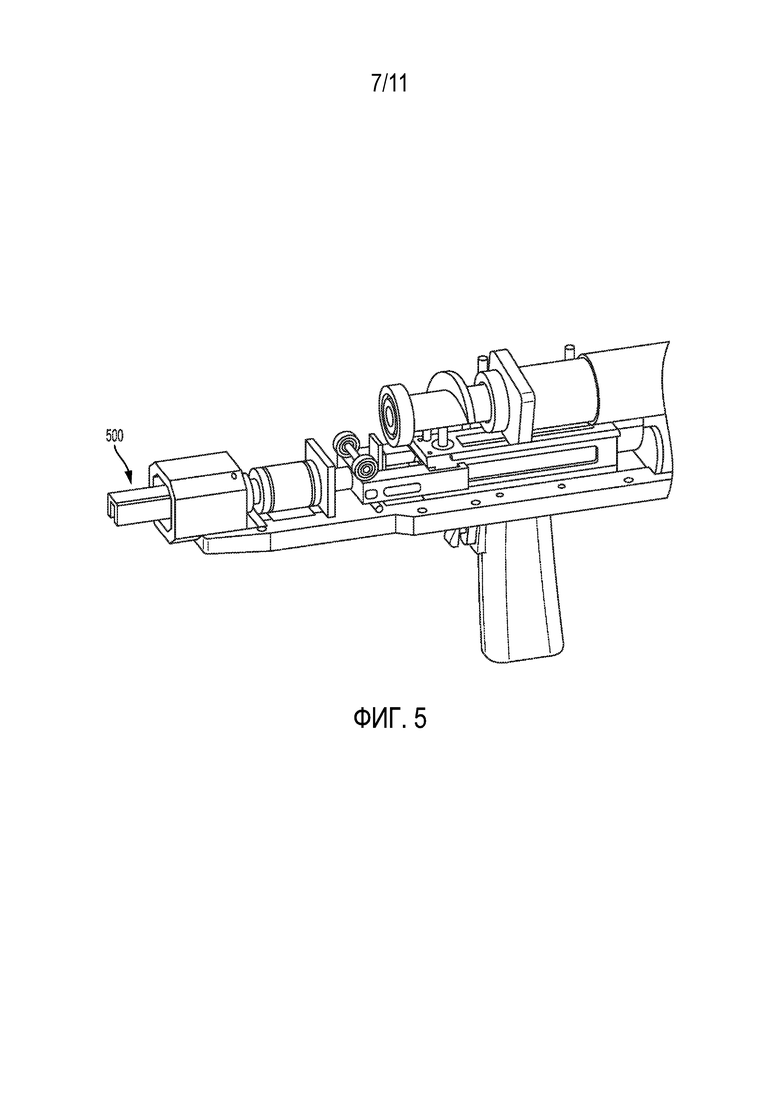
[0035] на ФИГ. 5 показан пример положения для измерения TIR для адаптера, соединенного с выходом ортопедического импактного инструмента в соответствии с одним вариантом осуществления;
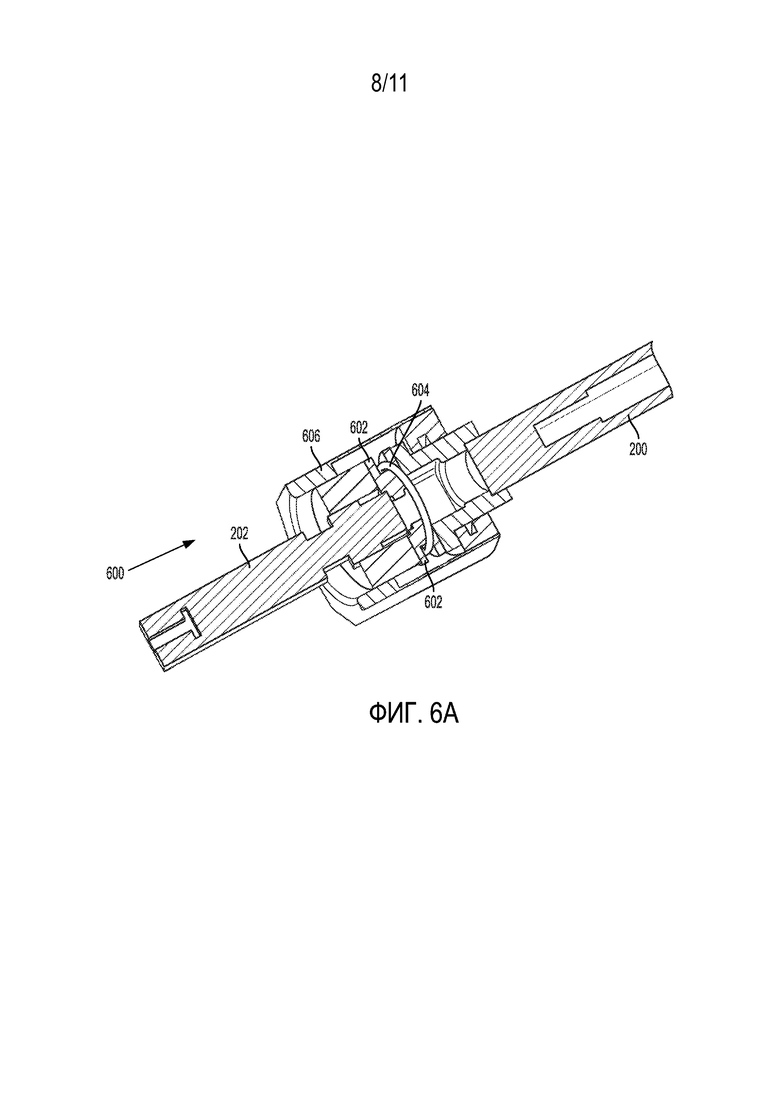
[0036] на ФИГ. 6А показан пример адаптера с гильзой обратного движения при установке адаптера на ортопедический импактный инструмент в соответствии с одним вариантом осуществления;
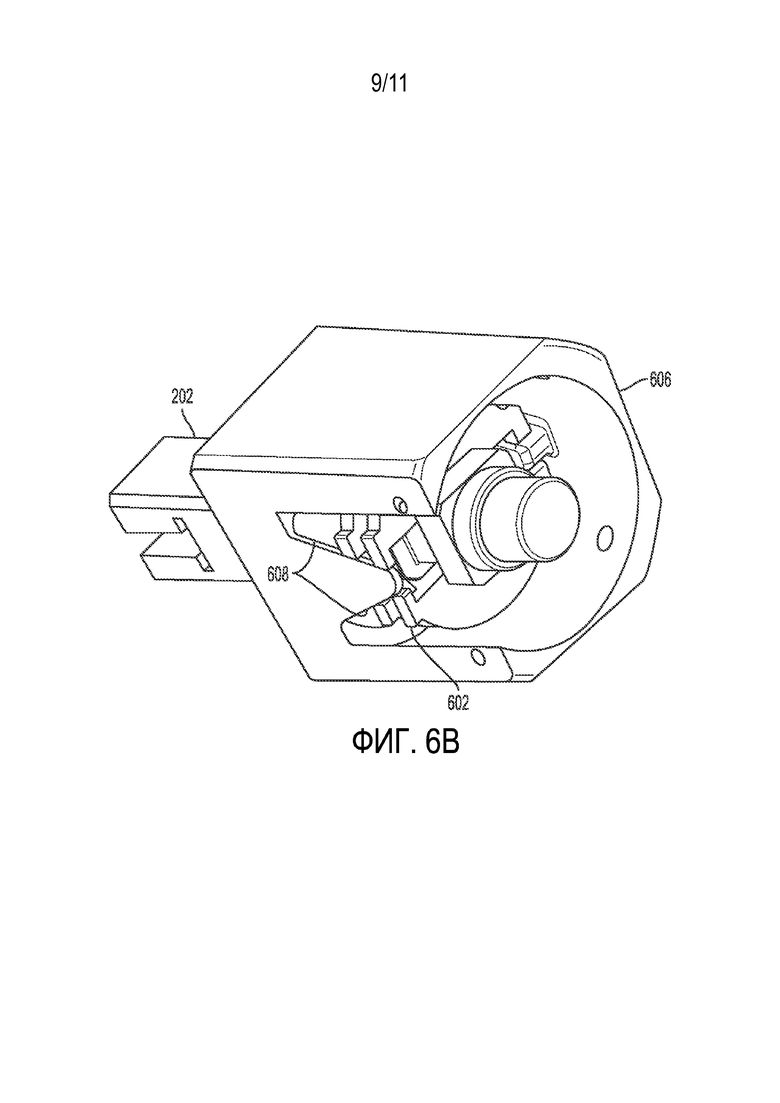
[0037] на ФИГ. 6В показан пример адаптера с гильзой обратного движения при снятии адаптера с ортопедического импактного инструмента в соответствии с одним вариантом осуществления;
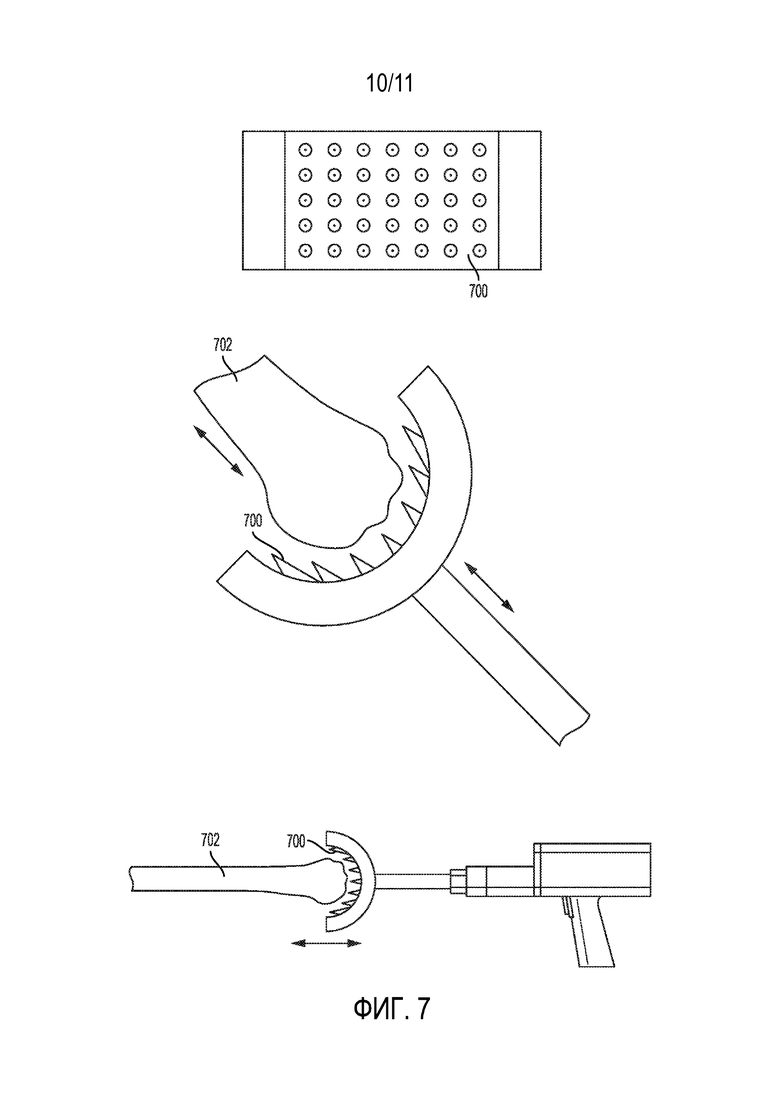
[0038] на ФИГ. 7 показано ортопедическое приспособление в соответствии с одним вариантом осуществления, используемое для формирования кости посредством обеспечения режущих зубцов по меньшей мере в одном направлении; и
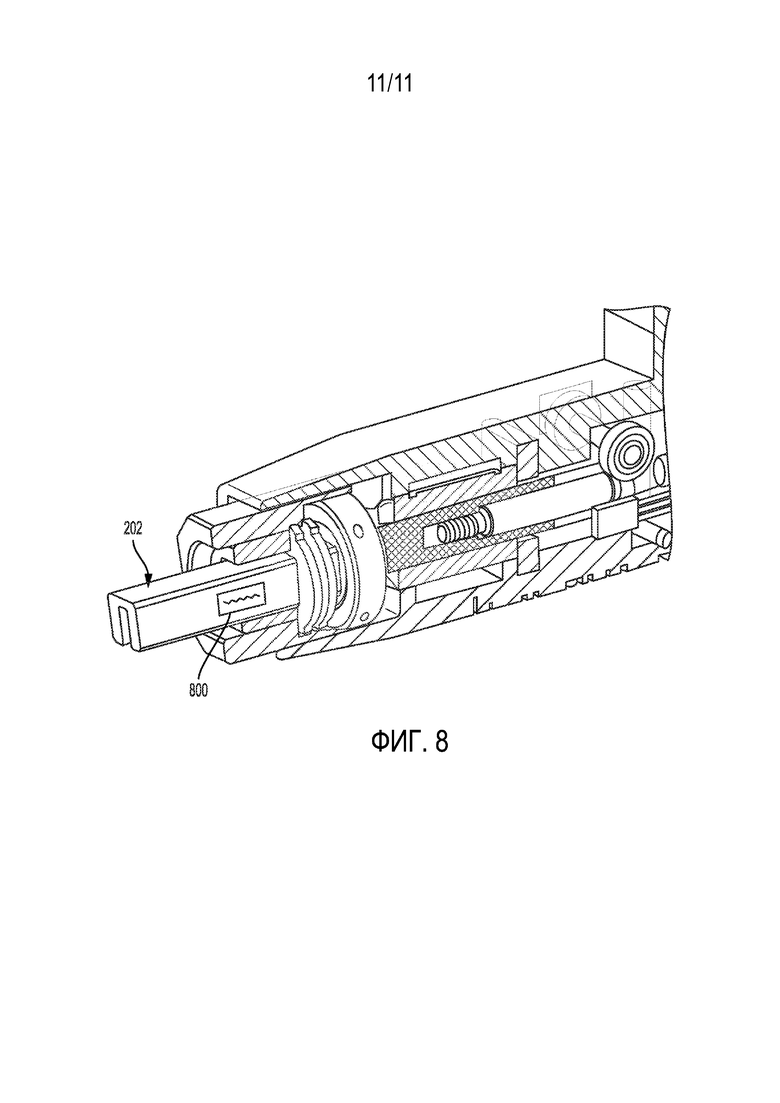
[0039] на ФИГ. 8 показан адаптер в соответствии с одним вариантом осуществления, включающий в себя элемент, который сообщается с импактором или хирургическим приспособлением.
ПОДРОБНОЕ ОПИСАНИЕ ИЛЛЮСТРАТИВНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0040] Описание, приведенное ниже в сочетании с прилагаемыми рисунками, предназначено для описания различных иллюстративных вариантов осуществления раскрытого объекта изобретения. Конкретные особенности и функциональные возможности описаны применительно к каждому иллюстративному варианту осуществления; однако специалистам в данной области будет очевидно, что описанные варианты осуществления можно реализовать на практике без каждого из таких конкретных элементов и функциональных возможностей.
[0041] Ссылка в данном описании на «один вариант осуществления» или «вариант осуществления» означает, что конкретный признак, структура, или характеристика, описанные в связи с вариантом осуществления, включены по меньшей мере в один вариант осуществления описанного объекта изобретения. Таким образом, появление таких фраз, как «в одном варианте осуществления», «в варианте осуществления» в различных местах по всему данному описанию не обязательно относится к одному и тому же варианту осуществления изобретения. Кроме того, конкретные особенности, конструкции или характеристики можно комбинировать любым приемлемым способом в одном или более вариантах осуществления. Кроме того, предполагается, что варианты осуществления раскрытого объекта изобретения охватывают его модификации и вариации.
[0042] Следует отметить, что в рамках настоящего описания и прилагаемой формулы изобретения использование формы единственного числа включает объекты во множественном числе, если из контекста явно не следует иное. То есть, если явно не указано иное, при использовании в настоящем документе слова в форме единственного числа имеют значение «один или более». Кроме того, следует понимать, что такие термины, как «левый», «правый», «верхний», «нижний», «передний», «задний», «сторона», «длина», «ширина», «сверху», «снизу», «внутри», «снаружи», «внутренний», «внешний» и т.п., которые могут использоваться в настоящем документе, просто описывают опорные точки и не обязательно ограничивают варианты осуществления настоящего описания какой-либо конкретной ориентацией или конфигурацией. Более того, такие термины, как «первый», «второй», «третий» и т.д., просто идентифицируют один из ряда частей, компонентов, стадий, операций, функций и/или опорных точек, описанных в настоящем документе и, аналогично, не обязательно ограничивают варианты осуществления настоящего описания какой-либо конкретной конфигурацией или ориентацией.
[0043] Кроме того, термины «приблизительно», «около», «примерно», «с незначительным изменением» и аналогичные термины по существу относятся к диапазонам, которые включают в себя указанное значение в пределах границ 20%, 10% или предпочтительно 5% в определенных вариантах осуществления, а также любые значения между этими границами.
[0044] Предполагается, что все функциональные возможности, описанные в связи с одним вариантом осуществления, должны быть применимы к дополнительным вариантам осуществления, описанным ниже, за исключением случаев, когда явно указано иное или когда элемент или функция несовместимы с дополнительными вариантами осуществления. Например, если данный элемент или функция явно описаны в связи с одним вариантом осуществления, но прямо не упоминаются в связи с альтернативным вариантом осуществления, следует понимать, что изобретатель предполагает, что этот элемент или функция могут быть размещены, использованы или реализованы в связи с альтернативным вариантом осуществления, если этот элемент или функция не являются несовместимыми с альтернативным вариантом осуществления.
[0045] При описании в настоящем документе примера инструмента, с которым может взаимодействовать улучшенный адаптер, предлагается приводной ортопедический импактный инструмент с контролируемыми вибрационными импактными воздействиями. Двигатель может быть электрическим, таким как бесщеточный автоклавируемый двигатель, такой как двигатель, по существу предлагаемый компанией Maxon Motor® и/или Portescap®. Двигатель может работать от батареи. Источник питания для ортопедического импактного инструмента может обеспечивать для ортопедического импактного инструмента портативность и взаимодействие беспроводным образом. Инструмент может включать в себя возможности для выполнения одного или множества импактных воздействий, а также импактных воздействий с переменными и варьирующимися направлениями, силами и частотами. В некоторых вариантах осуществления энергия удара является регулируемой. В некоторых вариантах осуществления импактное воздействие передается на хирургическое приспособление, такое как фреза, долото или другой концевой эффектор, соединенный с инструментом.
[0046] В некоторых вариантах осуществления инструмент имеет корпус. Корпус может надежно закрывать и удерживать по меньшей мере один компонент инструмента и может быть образован из материала, приемлемого для хирургического применения, такого как алюминий или полифенилсульфон (PPSF или PPSU), также известного под названием Radel®. В некоторых вариантах осуществления корпус содержит узел двигателя, по меньшей мере одну редукторную шестерню, пружинный элемент, ударник или выстреливаемую массу, схему или модуль управления, упор, первую или переднюю ударную поверхность для удара в прямом направлении и другую, вторую или заднюю ударную поверхность для удара в обратном направлении. Узел двигателя может включать в себя линейный преобразователь движения для преобразования вращательного привода двигателя. Пружинный элемент может представлять собой механическую, эластомерную или газовую пружину.
[0047] Инструмент дополнительно может включать в себя рукояточную часть с необязательной ручкой для комфортного и надежного удержания инструмента или приемлемый крепежный интерфейс для встраивания инструмента во время применения в роботизированный узел, а также адаптер, батарею, датчик положения, датчик направления и датчик кручения. Инструмент может дополнительно обеспечивать фокусированное освещение с помощью полупроводникового источника света, такого как светодиод, или традиционного источника света в виде лампы накаливания, для обеспечения освещения в хирургической рабочей зоне, в которой хирург применяет инструмент. Упор может быть соединен с хирургическим приспособлением: фрезой, долотом или другим концевым эффектором, известным в данной области, с помощью сопрягающего адаптера, который может иметь механизм быстрого присоединения для облегчения быстрой смены фрез различных размеров. Инструмент может дополнительно включать в себя элемент, фиксированный в осевом направлении, но с изменяемым поворотным положением, который позволяет адаптеру принимать разные положения в пространстве, чтобы оставить просвет между тканью и элементами инструмента, такими как рукоятка.
[0048] В некоторых вариантах осуществления ось выстреливаемой или толкаемой массы выровнена по оси вдоль направления перемещения, в пределах 20 градусов от оси адаптера, а более предпочтительно, в пределах 10 градусов оси адаптера. Такое осевое выравнивание имеет важное значение с точки зрения максимальной передачи энергии к хирургическому приспособлению, а также сведения к минимуму генерации внеосевых сил, которые могут способствовать нежелательным хирургическим результатам, таким как переломы. Авторы настоящего изобретения обнаружили, что такие преимущества осевого выравнивания отчасти связаны с тем, что кость является анизотропным материалом, что делает ее более прочной по отношению к силам сжатия или растяжения, чем к сдвиговым нагрузкам.
[0049] Автором изобретения было определено, что массовые соотношения и материалы, используемые для выстреливаемой или толкаемой массы, упора и адаптера, являются существенными с точки зрения эффективности передачи кинетической энергии выстреливаемой массы на хирургическое приспособление. Для целей некоторых вариантов осуществления зависимость энергии, переданной к хирургическому приспособлению, от кинетической энергии выстреливаемой массы или ударника называется передаточной функцией. Передаточная функция используется как мера эффективности, в том смысле, насколько эффективно инструмент выполняет хирургические процедуры фрезерования, импактного воздействия или извлечения. Например, было обнаружено, что в одной конфигурации, в которой выстреливаемая масса, упор и адаптер изготовлены из упрочненной нержавеющей стали, отношение энергии, передаваемой к хирургическому приспособлению, к кинетической энергии выстреливаемой массы, или передаточная функция, составляет менее 50%. За счет увеличения массового отношения выстреливаемой массы к ударной массе (сумме массы упора, адаптера и хирургического приспособления) эффективность адаптера и системы, в частности, передаточная функция для адаптера и системы, повысилась до более чем 60%, а во многих случаях - до 75%. На ФИГ. 4 показан вариант осуществления инструмента и показаны указанные выше массы, включая ударную массу 400 и выстреливаемую массу 402.
[0050] Инструмент в дополнительных вариантах осуществления включает в себя податливый элемент, вставленный между ударником и адаптером. Предпочтительно, податливый элемент представляет собой упругий материал, который хорошо восстанавливается после удара и обеспечивает минимальное демпфирование суммарной энергии. В качестве примера, в место раздела, в котором ударник воздействует на упор, может быть вставлен уретановый компонент. В другом примере податливый элемент может быть вставлен таким образом, что он уменьшает только ударную силу, действующую в прямом направлении, и не влияет на желательную резкую ударную силу в обратном направлении. Такой тип податливого элемента может ограничивать пиковое усилие при ударе, препятствуя тому, чтобы такие пиковые усилия вызывали переломы в кости пациента, сохраняя при этом высокую пиковую силу, необходимую для отведения застрявших фрез или других хирургических приспособлений.
[0051] В некоторых вариантах осуществления импактор соединен, например, с роботом, таким образом устраняя необходимость в портативном источнике питания (аккумуляторе) и/или в ручке для удерживания инструмента.
[0052] В некоторых вариантах осуществления соединение адаптера с инструментом включает в себя рычажный механизм или другие корректирующие механизмы, известные в данной области, позволяющие изменить положение хирургического приспособления (фрезы, долота или другого концевого эффектора) без необходимости поворота инструмента хирургом.
[0053] На ФИГ. 1 представлен вид в перспективе примера ортопедического импактного инструмента, с которым может взаимодействовать улучшенный адаптер. Двигатель 8 системы механического пружинного узла в комбинации с линейным преобразователем движения, который включает в себя цилиндр или цилиндрический кулачок 12 и кулачковый следящий элемент 13, приводит в действие первый пружинный поршень 19а и/или выстреливаемую массу или ударник 15 для обеспечения ударной силы в прямом направлении (также обеспечен второй пружинный поршень 19b для зацепления второй пружины 2b, прижимаемой к второй пластине-толкателю 26b для генерации ударной силы в обратном направлении). Следует отметить, что поршнем по существу называется ударяющий или толкающий элемент, и он может иметь любую из множества форм. Система пружинного узла дополнительно включает в себя, в некоторых вариантах осуществления, упор 5.
[0054] Цилиндрический кулачок 12 может включать в себя цилиндрическую часть 120, установленную в продольном направлении на стволе 122, проходящем между двигателем 8 и несущей опорой 124, и червячный элемент 126, выступающий радиально от цилиндрической части 120 и проходящий спирально вдоль длины цилиндрической части 120 от первого конца 126а червячного элемента до второго конца 126b червячного элемента.
[0055] Несущая опора 124 может включать в себя корпус 125, поддерживаемый второй пластиной-толкателем 26b, и подшипник, вложенный в корпус 125 и поддерживающий ствол 122.
[0056] Червячный элемент 126 может включать в себя заднюю поверхность 126bs, например поверхность, обращенную к первой пластине-толкателю 26а, и переднюю поверхность 126fs червячного элемента 126, например поверхность, обращенную ко второй пластине-толкателю 26b, которая контактирует с кулачковым следящим элементом 13 и заставляет кулачковый следящий элемент 13 следовать прямолинейному перемещению между первым концом 126а червячного элемента и вторым концом 126b червячного элемента при повороте червячного элемента 126.
[0057] Кулачковый следящий элемент 13 может смещаться вдоль червячного элемента 126 в прямом направлении, например, в направлении второй пластины-толкателя 26б, при контакте кулачкового следящего элемента 13 с передней поверхностью 126fs червячного элемента 126 и при повороте червячного элемента 126 в первом направлении 42а.
[0058] Кулачковый следящий элемент 13 может смещаться вдоль червячного элемента 126 в обратном направлении, например, к первой пластине-толкателю 26а, при контакте кулачкового следящего элемента 13 с задней поверхностью 126bs червячного элемента 126, например, поверхностью, обращенной к пластине-толкателю 26а и при повороте червячного элемента 126 во втором направлении, противоположном первому направлению 42а.
[0059] Демпферы 14а и 14b функционируют как стопоры для предотвращения импактного воздействия на ударник 15 торцевых поверхностей поршня 19а и 19b.
[0060] Цилиндрический кулачок 12 может повышать эффективность ортопедического импактного инструмента, позволяя двигателю 8 поворачиваться на более большие углы по сравнению с обычным линейным преобразователем движения, использующим традиционные вертикальные кулачки, которые ударяют по кулачковому следящему элементу 13 в ходе небольших повторяющихся тактов. Таким образом, цилиндрический кулачок 12 позволяет использовать вращения двигателя на большее число радианов для получения энергии и, таким образом, значительно уменьшает потребление тока аккумуляторной батареи. Соответственно, в некоторых вариантах осуществления можно использовать одну главную батарею, применяя преимущества, обеспечиваемые цилиндрическим кулачком 12 в плане уменьшения потребления тока.
[0061] Кроме того, цилиндрический кулачок 12 в некоторых случаях может допускать удаление промежуточного узла зубчатой передачи, так как цилиндрический кулачок 12 может быть непосредственно установлен на стволе 122 и, таким образом, может повышать эффективность и при этом снижать стоимость ортопедического инструмента.
[0062] В некоторых вариантах осуществления инструмент облегчает контролируемое непрерывное импактное воздействие, при котором импактное воздействие зависит от положения переключателя 30 спускового механизма, функционально связанного, например, с источником питания или двигателем. При таком непрерывном импактном воздействии, после активации переключателя спускового механизма и в зависимости от положения переключателя 30 спускового механизма инструмент может, например, проходить полные циклы со скоростью, пропорциональной положению пускового переключателя. Таким образом, в режиме одиночного импактного воздействия или непрерывного импактного воздействия хирург может легко управлять созданием или формированием хирургической области.
[0063] В некоторых вариантах осуществления контролируемое непрерывное импактное воздействие управляется по меньшей мере частично контроллером 21. Контроллер 21, например, может включать в себя схему обработки для контроля и управления временем работы в режиме непрерывного импактного воздействия. В некоторых примерах контроллер 21 может включать в себя микроконтроллер, систему на микросхеме, программируемое логическое устройство и/или микропроцессор, включающий в себя таймерную схему для определения временных параметров высвобождения энергии хирургическим импактным инструментом. Контроллер может обмениваться данными с источником питания, таким как аккумуляторная батарея, размещенная на хирургическом импактном устройстве или внутри него, или с разъемом питания, ведущим к отдельному источнику питания.
[0064] Контроллер 21 в некоторых вариантах осуществления включает в себя инструкции, сохраненные на энергонезависимом машиночитаемом носителе, которые при выполнении заставляют контроллер 21 управлять запасанием и высвобождением энергии для обеспечения повторяющегося непрерывного импактного воздействия. В некоторых вариантах осуществления контроллер 21 включает в себя один или более приемников для приема сигналов от одного или более коммуникационных устройств или датчиков, таких как датчик положения, RFID-метка, датчик приближения или датчик перемещения. Инструкции, например, могут включать в себя инструкции, выполненные с возможностью запуска импактного воздействия, приостановки импактного воздействия и/или адаптации времени запасания и высвобождения энергии на основании сигналов, полученных от одного или более датчиков или других коммуникационных устройств.
[0065] Контроллер в некоторых вариантах осуществления включает в себя один или более выходных элементов для подачи сигналов на другие элементы хирургического импактного устройства. В некоторых вариантах осуществления контроллер включает в себя выходное аудиоустройство для выдачи звукового уведомления пользователю на основании события, например, события низкого уровня питания или предполагаемого события механического повреждения.
[0066] В некоторых вариантах осуществления при завершении узлом цилиндрического кулачка 12 своего курса, например, когда кулачковый следящий элемент 13 сместится вдоль задней поверхности 126bs или передней поверхности 126fs между первым концом 126а червячного элемента и вторым концом 126b червячного элемента, он предпочтительно активирует датчик 28, функционально соединенный с контроллером 21. Датчик 28 помогает в регулировании предпочтительной циклической работы цилиндрического кулачка 12. Например, датчик 28 может подавать сигнал остановки на двигатель 8 так, чтобы цилиндрический кулачок 12 находился в точке минимального запасания потенциальной энергии или вблизи нее. Таким образом, за один полный цикл направленное вперед или назад импактное усилие, может быть приложено к фрезе, долоту или другому концевому эффектору, или к имплантату или протезу. В дополнительном варианте осуществления преимущественным может быть ввести задержку или подсчитать количество ударов для любой данной процедуры, прежде чем начинать следующий цикл, что позволит точно проконтролировать скорость импактного воздействия и, в свою очередь, позволит хирургу точно контролировать величину подачи энергии при любой данной рабочей операции. В еще одном дополнительном варианте осуществления может преимущественным остановить цилиндрический кулачок 12 вблизи точки максимального накопления потенциальной энергии, чтобы уменьшить латентный период инструмента в руках хирурга. Латентный период, согласно определению, представляет собой время между моментом, когда хирург (или пользователь) активирует ортопедический импактный инструмент, и моментом, когда инструмент фактически выполнит удар. Автор настоящего изобретения определил, что латентные периоды приблизительно 100 миллисекунд или менее по существу выглядят как мгновенный ответ. В результате остановки цилиндрического кулачка 12 в точке, в которой запасена по меньшей мере часть потенциальной энергии, создается эффект практически мгновенного высвобождения потенциальной энергии при активации спускового механизма 30 инструмента.
[0067] По существу на ФИГ. 2А-8 ортопедический импактор показан с различными конфигурациями адаптеров, которые используются с ним.
[0068] На ФИГ. 2А показан хирургический импактор 200 и адаптер 202, причем адаптер 202 может быть вставлен в импактор 200 в любом из 4 разных поворотных положений относительно оси 210 импактного воздействия. Например, как показано на ФИГ. 2А, ось 210 импактного воздействия или ось, вдоль которой выстреливается упор или масса, ориентированы горизонтально по длине, влево и вправо на фигуре, а адаптер 202 имеет по существу квадратное поперечное сечение по меньшей мере с четырьмя поверхностями 212а, 212b, 212с, 212d, которые образуют по меньшей мере четыре отдельные плоскости вокруг продольной оси адаптера 202. Эти плоскости проходят параллельно оси импактного воздействия или оси упора и позволяют вставлять адаптер 202 в импактор 200 в 4 различных поворотных ориентациях. Несомненно, хотя посредством квадратного интерфейса, изображенного на ФИГ. 2А, показана вставка в 4 различных поворотных положениях, возможны дополнительные поворотные положения. Например, адаптер с шестиугольным интерфейсом может иметь 6 различных поворотных конфигураций, а адаптер с восьмиугольным интерфейсом может иметь 8 различных поворотных конфигураций. Различные углы вставки обеспечивают множество положений хирургического приспособления, при этом сохраняя способность хирурга удерживать инструмент в более эргономичной ориентации.
[0069] На ФИГ. 2В и 2С импактор 200, адаптер 202 и хирургическое приспособление 204 (например, фреза) показаны как в не соединенном состоянии, так и в соединенном состоянии.
[0070] На ФИГ. 3 представлен вариант осуществления, в котором множество поверхностей адаптера, таких как поверхность 300 для ударов в прямом направлении и поверхность 302 для ударов в обратном направлении, обеспечивают как проксимальное, так и дистальное импактное воздействие на адаптер и, следовательно, на хирургическое приспособление. Способность оказывать импактные воздействия в проксимальном и дистальном направлениях особенно используема в тех случаях, когда приспособления застревают в полости. Путем приложения непосредственного воздействия обратного удара на адаптер, застрявший инструмент можно легко удалить из полости. Автор настоящего изобретения обнаружил, что площади поверхностей должны быть такими, чтобы выдерживать ударную силу в диапазоне от 1 килоньютона до 50 килоньютонов и, более конкретно, около 15 килоньютонов для обеспечения общей долговечности хирургического импактора с течением времени. В одном примере площадь контакта между импактором 200 и либо поверхностью 300 для ударов в прямом направлении, либо поверхностью 302 для ударов в обратном направлении должна составлять от 20 мм2 до 200 мм2, чтобы она могла передавать и выдерживать необходимую ударную силу.
[0071] На ФИГ. 5 показано положение на адаптере, в котором можно измерить общее индикаторное показание (TIR) для адаптера. Как показано на фигуре, величину TIR адаптера следует измерять на наконечнике 500 адаптера, а в некоторых вариантах осуществления адаптер должен быть выполнен так, чтобы значение TIR составляло менее 5 мм, а более предпочтительно, менее 2 мм. При использовании малого значения TIR повышается точность ортопедического импактора. В процессе использования эта точность приводит к минимизации искажений полости, уменьшению потерь энергии в боковых направлениях, улучшению прилегания имплантатов и улучшению результатов хирургического вмешательства. Для сравнения, другие известные хирургические приспособления имеют значения TIR порядка 20 мм. Значение TIR 2 мм или менее является существенным улучшением и позволяет получать полости с значительно более точными контурами и формами.
[0072] На ФИГ. 6А и 6В представлен один вариант осуществления процедур вставки и извлечения адаптера, соединенного с импактором посредством гильзы обратного движения.
[0073] В одном варианте осуществления гильза обратного движения может включать в себя освобождающую втулку 606, защелкивающее кольцо 604 и удерживающие зажимы 602. Как показано на ФИГ. 6А, адаптер 202 вставляют посредством одного вставляющего движения 600 в сторону импактора, фиксируя соединение с импактором 200. Во время этого движения удерживающие зажимы 602 внутри освобождающей втулки 606 принудительно раздвигаются в процессе перемещения адаптера 202 внутрь. Защелкивающее кольцо 604 фиксирует или иным образом устанавливает и удерживает на месте удерживающие зажимы 602 на адаптере 202. В одном примере защелкивающее кольцо 604 может представлять собой кольцевую прокладку. В других вариантах осуществления удерживающие зажимы 602 могут быть зафиксированы на месте с помощью пружинного кольца, прилагающего направленное внутрь радиальное усилие, сохраняя положение удерживающих зажимов 602. В дополнительных вариантах осуществления защелкивающее кольцо 604 может включать в себя эластомерное кольцо.
[0074] Как показано на ФИГ. 6В, адаптер 202 в некоторых вариантах осуществления может быть отсоединен от импактора путем нажатия на освобождающую втулку 606. Освобождающая втулка 606 включает в себя кулачковые поверхности 608, выполненные с возможностью раздвигания удерживающих зажимов 602 по мере того, как освобождающая втулка 606 скользит и постепенно выходит из контакта с удерживающими зажимами 602 от более узкого участка кулачковых поверхностей 608 к более широкому участку кулачковых поверхностей 608. Когда удерживающие зажимы 602 раздвигаются достаточно, чтобы освободить адаптер 202, адаптер 202 может быть выведен наружу от импактора 200. В альтернативном примере гильза обратного движения может включать в себя зубчатое колесо и рейку вместо кулачковых поверхностей 608, которые разделяют удерживающие зажимы 602 при отсоединении адаптера 202 от импактора.
[0075] Как показано на ФИГ. 7, хирургическое приспособление для применения с адаптером и электроприводным ортопедическим импактором имеет режущие зубцы 700 для формирования кости 702 для приема имплантата. В одном примере режущие зубцы 700 могут быть расположены на поверхности импактора так, что зубцы 700 производят разрез линейно относительно оси импактора. В дополнительном варианте осуществления зубцы могут быть выполнены таким образом, чтобы улучшить посадку запрессовываемого имплантата, например, коленного. В еще одном дополнительном варианте осуществления хирургическое приспособление для применения с адаптером может включать в себя элементы, которые увеличивают площадь поверхности, доступную для соединения с адгезивными имплантатами.
[0076] На ФИГ. 8 представлен пример датчика 800, включенного в адаптер 202, который передает информацию в импактор и позволяет хирургу более точно управлять импактором. Эту информацию может использовать, например, контроллер, такой как контроллер 21, изображенный на ФИГ. 1, например, для корректировки хода, мощности или частоты ударов. Например, если адаптер используется при установке шаровой головки, при которой непрерывные импактные воздействия не являются желательными, датчик адаптера может быть выполнен с возможностью передачи импактору требования о работе одиночными ударами, а не повторяющимися ударами. В этой ситуации результаты хирургического вмешательства будут лучше, поскольку будет меньше вероятность, что хирург вызовет проседание имплантата при импактных воздействиях на шаровую головку. Адаптер может определять хирургическое приспособление и информацию о его типе или конфигурации, например, как в приведенном выше примере инструмента для установки шаровой головки, посредством взаимодействия с хирургическим приспособлением с помощью того же датчика, или второго датчика, или иного устройства связи. Например, датчик может передавать идентификационный сигнал или код, интерпретируемый контроллером 21 и используемый контроллером 21 для изменения основных настроек на те, которые подходят для конкретного хирургического приспособления. В конкретном примере RFID-датчик на адаптере может запрашивать пассивную RFID-метку хирургического приспособления и определять тип хирургического приспособления, а также передавать идентификационный сигнал или код, полученный от пассивной RFID-метки, на контроллер 21. В другом примере физическая маркировка на хирургическом приспособлении может идентифицироваться механическим способом (например, «совмещаться как ключ» с адаптером) или идентифицироваться электронным способом (например, «сканироваться» с помощью сканирующего датчика адаптера) для определения типа хирургического приспособления, соединенного с адаптером. В некоторых примерах параметры могут включать в себя частоту ударов, силу ударов и/или направление ударов. В некоторых вариантах осуществления хирургическое приспособление выполнено за одно целое с адаптером и, следовательно, не может быть отсоединено от него. В таких вариантах осуществления адаптер может хранить информацию, относящуюся к хирургическому приспособлению, и передавать информацию на хирургический импактор.
[0077] В качестве другого примера, передача и контроль информации о частоте позволяют инструменту точно и последовательно контролировать частоту импактных перемещений. Регулируя частоту ударов ударника, инструмент может передавать большее взвешенное по времени вибрационное импактное воздействие при сохранении одной величины удара. Это позволяет хирургу лучше контролировать скорость резания для хирургического приспособления. Например, хирург может выбрать резание с более высокой скоростью (с большей частотой импактных воздействий) во время основной части перемещения хирургического приспособления, а затем замедлить скорость резания по мере приближения хирургического приспособления к требуемой глубине. Фактически, во время испытания инструмента было обнаружено, что более высокая частота импактных воздействий, например 3 удара в секунду, предпочтительно до 10 ударов в секунду, в сочетании с по существу постоянной энергией удара, составляющей от 2 до 6 джоулей в секунду, предпочтительно до 40 джоулей в секунду, позволяет хирургу лучше размещать определенные хирургические приспособления. Это было показано, например, при установке вертлужной чашки, при которой частота ударов по меньшей мере 3 удара в секунду и энергии от 2 до 6 джоулей в секунду приводила к гораздо более эффективному контролю положения вертлужной чашки по сравнению с методикой ручного вбивания молотком. Автор изобретения обнаружил, что в качестве еще одного неожиданного дополнительного преимущества быстрого импактного воздействия, имеющегося у электроприводного ортопедического импактора, можно уменьшить энергию, необходимую для выполнения работы, поскольку перемещение хирургического инструмента было более плавным и непрерывным (т.е. с меньшей функцией начала и останова, подобно ударам хирургического молоточка). Это преимущество быстрого импактного воздействия (например, со скоростью более 3 раз в секунду) основывается на технических различиях между статическим и динамическим трением. Динамическое трение почти всегда меньше статического трения, поэтому более непрерывное перемещение фрезы, имплантата или другого хирургического приспособления позволяет снизить общее усилие во время работы. Кроме того, согласно опыту, полученному автором изобретения в операционной, практически непрерывное перемещение хирургического приспособления не только уменьшает суммарную необходимую энергию, но и приводит к лучшему результату хирургической процедуры. В конкретном случае рассверливания вертлужной впадины, дрильбор может оставлять впадины и пики. При использовании более непрерывного или более высокочастотного импактного воздействия, описанного в настоящем документе, впадины и пики уменьшаются и фактически разглаживаются. Это можно отчетливо увидеть в патологоанатомических лабораториях. В частности, при установке чашки в вертлужной впадине улучшенная фиксация достигается в результате более плотного контакта между поверхностями.
[0078] Информация, передаваемая между адаптером, импактором и хирургическим приспособлением, может иметь вид настроек или другой идентификационной информации, к которой можно обращаться (например, посредством контроллера 21) в таблицах или базах данных для определения параметров конфигурации, как описано в примерах выше. Взаимодействие между адаптером, хирургическим импактором и хирургическим приспособлением может осуществляться различными способами, в том числе механическим, магнитным, электрическим или беспроводным способом. Например, для передачи информации между адаптером, импактором и хирургическим приспособлением может использоваться протокол беспроводной передачи данных ближнего радиуса действия, такой как радиочастотная идентификация (RFID) или Bluetooth®. В одном варианте осуществления пассивную технологию RFID можно использовать для получения информации, относящейся к типу хирургического приспособления, таким образом избегая необходимости размещать источник питания внутри хирургического приспособления. В другом примере ручная регулировка скорости, например, рукояткой скорости, может передавать механический сигнал хирургическому импактору, таким образом запуская корректировку скорости импактного воздействия на контроллере.
[0079] Хотя были описаны определенные варианты осуществления, данные варианты осуществления представлены только в качестве примера и не призваны ограничить объем настоящего изложения. Более того, новые способы, аппараты и системы, описанные в настоящем документе, могут быть реализованы в различных других формах; более того, могут быть выполнены различные пропуски, замены и изменения формы способов, аппаратов и систем, описанных в настоящем документе, без отступления от сущности настоящего изложения. Предполагается, что прилагаемые пункты формулы изобретения охватывают такие формы и модификации, как попадающие в рамки объема и сущности настоящего изобретения.
Группа изобретений относится к вариантам адаптера для сопряжения хирургического приспособления с электроприводным хирургическим импактным инструментом. Хирургический импактный инструмент включает в себя упор и выполнен с возможностью генерирования энергии для перемещения упора в прямом или обратном направлении вдоль оси упора. Поверхность адаптера для ударов в прямом направлении взаимодействует с предназначенной для ударов в прямом направлении поверхностью хирургического импактного инструмента. Поверхность адаптера для ударов в обратном направлении отличается от поверхности для ударов в прямом направлении и взаимодействует с предназначенной для ударов в обратном направлении поверхностью хирургического импактного инструмента, отличной от предназначенной для ударов в прямом направлении поверхности хирургического импактного инструмента. Первая, вторая и третья поверхности адаптера образуют первую, вторую и третью плоскости, каждая из которых параллельна оси упора. Первая, вторая и третья поверхности позволяют располагать адаптер по отношению к хирургическому импактному инструменту в первом, втором и третьем поворотных положениях вокруг оси упора. Поверхности адаптера для ударов в прямом направлении или для ударов в обратном направлении входят в контакт с упором во время работы хирургического импактного инструмента и передают импактное воздействие через адаптер на хирургическое приспособление. В другом варианте адаптер выполнен с возможностью сопряжения хирургического приспособления на переднем конце адаптера с электроприводным хирургическим импактором. Поверхность адаптера, ориентированная перпендикулярно оси упора, принимает ударную силу в первом направлении и передает ее упору в первом направлении вдоль оси упора. Достигается повышение точности импактора, уменьшение потерь энергии в боковых направлениях, улучшение прилегания имплантатов и улучшение результатов хирургического вмешательства, а также минимизация искажений полости в области имплантации с получением полостей с более точными контурами и формами. 2 н. и 10 з.п. ф-лы, 8 ил.
1. Адаптер, выполненный с возможностью сопряжения хирургического приспособления с электроприводным хирургическим импактным инструментом, причем хирургический импактный инструмент включает в себя упор и выполнен с возможностью генерирования энергии для перемещения упора в прямом или обратном направлении вдоль оси упора, при этом адаптер содержит:
поверхность для ударов в прямом направлении, выполненную с возможностью взаимодействия с предназначенной для ударов в прямом направлении поверхностью хирургического импактного инструмента;
поверхность для ударов в обратном направлении, отличающуюся от поверхности для ударов в прямом направлении, выполненную с возможностью взаимодействия с предназначенной для ударов в обратном направлении поверхностью хирургического импактного инструмента, отличной от предназначенной для ударов в прямом направлении поверхности хирургического импактного инструмента; и
первую поверхность, вторую поверхность и третью поверхность, при этом первая, вторая и третья поверхности образуют отдельные и соответствующие первую, вторую и третью плоскости, каждая из которых по существу параллельна оси упора, при этом
первая поверхность, вторая поверхность и третья поверхность позволяют располагать адаптер по отношению к хирургическому импактному инструменту в отдельных и соответствующих первом, втором и третьем поворотных положениях вокруг оси упора;
при этом поверхность для ударов в прямом направлении или поверхность для ударов в обратном направлении выполнена с возможностью входа в контакт с упором во время работы хирургического импактного инструмента и передачи импактного воздействия через адаптер на хирургическое приспособление.
2. Адаптер по п. 1, дополнительно содержащий четвертую поверхность, образующую четвертую плоскость, отличающуюся от первой, второй и третьей плоскостей, которая по существу параллельна оси упора и которая позволяет адаптеру располагаться по отношению к хирургическому импактному инструменту в четвертом поворотном положении вокруг оси упора, отличающемся от первого, второго и третьего поворотных положений.
3. Адаптер по п. 1, в котором поверхность, проксимальная к хирургическому импактному инструменту, выполнена с возможностью обеспечения присоединения адаптера к хирургическому импактному инструменту одним движением вдоль или параллельно оси упора.
4. Адаптер по п. 1, в котором поверхность для ударов в прямом направлении или поверхность для ударов в обратном направлении выполнена с возможностью зацепления и высвобождения освобождающей втулки, соединенной с хирургическим импактным инструментом, для присоединения и отсоединения адаптера от хирургического импактного инструмента.
5. Адаптер по п. 4, в котором освобождающая втулка выполнена с возможностью отсоединения от адаптера путем плавного смещения освобождающей втулки к хирургическому импактному инструменту.
6. Адаптер по п. 1, причем адаптер и хирургическое приспособление представляют собой единый компонент.
7. Адаптер, выполненный с возможностью сопряжения хирургического приспособления на переднем конце адаптера с электроприводным хирургическим импактором, причем хирургический импактор включает в себя упор и выполнен с возможностью генерирования энергии для перемещения упора вдоль оси упора, при этом адаптер содержит:
поверхность, ориентированную по существу перпендикулярно оси упора и выполненную с возможностью приема ударной силы в первом направлении и передачи ее упору в первом направлении вдоль оси упора; и
первую поверхность, вторую поверхность и третью поверхность, при этом первая, вторая и третья поверхности образуют отдельные и соответствующие первую, вторую и третью плоскости, каждая из которых по существу параллельна оси упора, при этом
первая поверхность, вторая поверхность и третья поверхность позволяют располагать адаптер по отношению к хирургическому импактору в отдельных и соответствующих первом, втором и третьем поворотных положениях вокруг оси упора.
8. Адаптер по п. 7, дополнительно содержащий четвертую поверхность, образующую четвертую плоскость, отличающуюся от первой, второй и третьей плоскостей, которая по существу параллельна оси упора и которая позволяет адаптеру располагаться по отношению к хирургическому импактору в четвертом поворотном положении вокруг оси упора, отличающемся от первого, второго и третьего поворотных положений.
9. Адаптер по п. 7, в котором поверхность, проксимальная к хирургическому импактору, выполнена с возможностью обеспечения присоединения адаптера к хирургическому импактору одним движением вдоль или параллельно оси упора.
10. Адаптер по п. 7, в котором по существу перпендикулярная оси упора поверхность выполнена с возможностью зацепления и высвобождения освобождающей втулки, соединенной с хирургическим импактором, для соединения и отсоединения адаптера от хирургического импактора.
11. Адаптер по п. 10, в котором освобождающая втулка выполнена с возможностью отсоединения от адаптера путем плавного смещения освобождающей втулки вдоль или параллельно оси упора.
12. Адаптер по п. 7, причем адаптер и хирургическое приспособление представляют собой единый компонент.
| WO 2017180622 A1, 19.10.2017 | |||
| WO 2018055501 A1, 29.03.2018 | |||
| US 2017367714 A1, 28.12.2017 | |||
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ОТБОРОВ И ВОЗДЕЙСТВИЙ НА КУСТЕ СКВАЖИН | 2014 |
|
RU2548460C1 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ ОТХОДОВ ВОЛОКНИСТЫХ МАТЕРИАЛОВ | 2004 |
|
RU2277469C1 |
| АКТИВНОЕ ПОЗИЦИОНИРУЮЩЕЕ УСТРОЙСТВО ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА И СОДЕРЖАЩАЯ ЕГО ХИРУРГИЧЕСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА | 2013 |
|
RU2651886C2 |
| УСТРОЙСТВО ДЛЯ ПОВОРОТА ИНСТРУМЕНТА С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 2002 |
|
RU2284160C2 |
