ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
В некоторых обстоятельствах эндоскопические хирургические инструменты могут быть предпочтительнее традиционных хирургических устройств для проведения открытых операций, поскольку при разрезе меньшего размера может сокращаться восстановительный период после оперативного вмешательства и снижаться риск осложнений. Следовательно, некоторые эндоскопические хирургические инструменты могут быть приемлемы для введения дистального концевого эффектора в требуемое хирургическое поле через канюлю троакара. Для достижения диагностического или терапевтического эффекта эти дистальные концевые эффекторы (например, эндокатер, зажим, резак, сшивающий инструмент, клипсонакладыватель, устройство доступа, устройство для доставки лекарственных средств/генной терапии и устройство доставки энергии с помощью ультразвуковой вибрации, радиочастот (РЧ), лазера и т. д.) могут взаимодействовать с тканью рядом способов. Эндоскопические хирургические инструменты могут содержать ствол между концевым эффектором и участком рукоятки, манипуляции с которым осуществляет врач. Такой ствол может делать возможным введение на заданную глубину и вращение вокруг продольной оси ствола, таким образом облегчая позиционирование концевого эффектора внутри организма пациента. Позиционирование концевого эффектора может дополнительно облегчаться посредством включения одного или более шарнирных сочленений или элементов, позволяющих избирательно шарнирно поворачивать или иным образом отклонять концевой эффектор относительно продольной оси ствола.
Примеры эндоскопических хирургических инструментов включают в себя хирургические сшивающие инструменты. Некоторые из таких сшивающих инструментов выполнены с возможностью зажатия слоев ткани, разрезания зажатых слоев ткани и прошивания слоев ткани скобами, чтобы по существу скрепить рассеченные слои ткани вместе рядом с рассеченными концами слоев ткани. Исключительно в качестве примеров приведены хирургические сшивающие инструменты, раскрываемые в патенте США № 4,805,823, озаглавленном «Pocket Configuration for Internal Organ Staplers», выданном 21 февраля 1989 г.; патенте США № 5,415,334, озаглавленном «Surgical Stapler and Staple Cartridge», выданном 16 мая 1995 г.; патенте США № 5,465,895, озаглавленном «Surgical Stapler Instrument», выданном 14 ноября 1995 г.; патенте США № 5,597,107, озаглавленном «Surgical Stapler Instrument», выданном 28 января 1997 г.; патенте США № 5,632,432, озаглавленном «Surgical Instrument», выданном 27 мая 1997 г.; патенте США № 5,673,840, озаглавленном «Surgical Instrument», выданном 7 октября 1997 г.; патенте США № 5,704,534, озаглавленном «Articulation Assembly for Surgical Instruments», выданном 6 января 1998 г.; патенте США № 5,814,055, озаглавленном «Surgical Clamping Mechanism», выданном 29 сентября 1998 г.; патенте США № 6,978,921, озаглавленном «Surgical Stapling Instrument Incorporating an E-Beam Firing Mechanism», выданном 27 декабря 2005 г.; патенте США № 7,000,818, озаглавленном «Surgical Stapling Instrument Having Separate Distinct Closing and Firing Systems», выданном 21 февраля 2006 г.; патенте США № 7,143,923, озаглавленном «Surgical Stapling Instrument Having a Firing Lockout for an Unclosed Anvil», выданном 5 декабря 2006 г.; патенте США № 7,303,108, озаглавленном «Surgical Stapling Instrument Incorporating a Multi-Stroke Firing Mechanism with a Flexible Rack», выданном 4 декабря 2007 г.; патенте США № 7,367,485, озаглавленном «Surgical Stapling Instrument Incorporating a Multistroke Firing Mechanism Having a Rotary Transmission», выданном 6 мая 2008 г.; патенте США № 7,380,695, озаглавленном «Surgical Stapling Instrument Having a Single Lockout Mechanism for Prevention of Firing», выданном 3 июня 2008 г.; патенте США № 7,380,696, озаглавленном «Articulating Surgical Stapling Instrument Incorporating a Two-Piece E-Beam Firing Mechanism», выданном 3 июня 2008 г.; патенте США № 7,404,508, озаглавленном «Surgical Stapling and Cutting Device», выданном 29 июля 2008 г.; патенте США № 7,434,715, озаглавленном «Surgical Stapling Instrument Having Multistroke Firing with Opening Lockout», выданном 14 октября 2008 г.; патенте США № 7,721,930, озаглавленном «Disposable Cartridge with Adhesive for Use with a Stapling Device», выданном 25 мая 2010 г.; патенте США № 8,408,439, озаглавленном «Surgical Stapling Instrument with An Articulatable End Effector», выданном 2 апреля 2013 г.; и патенте США № 8,453,914, озаглавленном «Motor-Driven Surgical Cutting Instrument with Electric Actuator Directional Control Assembly», выданном 4 июня 2013 г. Описание каждого из процитированных выше патентов США включено в настоящий документ путем ссылки.
Несмотря на то что упомянутые выше хирургические сшивающие инструменты описаны в связи с применением во время эндоскопических процедур, следует понимать, что такие хирургические сшивающие инструменты также можно применять во время открытых вмешательств и/или при других неэндоскопических процедурах. Исключительно для примера, при торакальном хирургическом вмешательстве, во время которого для создания прохода для сшивающего инструмента не применяют троакар, хирургический сшивающий инструмент может быть введен посредством торакотомии и, таким образом, между ребрами пациента для получения доступа к одному или более органам. Такие вмешательства могут включать в себя применение сшивающего инструмента для рассечения и закрытия сосуда, ведущего к легкому. Например, сосуды, ведущие к органу, можно рассечь и закрыть с помощью сшивающего инструмента перед удалением органа из грудной полости. Конечно, хирургические сшивающие инструменты можно применять в различных других обстоятельствах и процедурах.
Примеры хирургических сшивающих инструментов, которые особенно подходят или применяются в ходе торакотомии, описаны в заявке на патент США № 14/810,786, озаглавленной «Surgical Staple Cartridge with Compression Feature at Knife Slot», поданной 29 июля 2015 г.; публикации патента США № 2014/0243801, озаглавленной «Surgical Instrument End Effector Articulation Drive with Pinion and Opposing Racks», опубликованной 28 августа 2014 г.; публикации патента США № 2014/0239041, озаглавленной «Lockout Feature for Movable Cutting Member of Surgical Instrument», опубликованной 28 августа 2014 г.; публикации патента США № 2014/0239042, озаглавленной «Integrated Tissue Positioning and Jaw Alignment Features for Surgical Stapler», опубликованной 28 августа 2014 г.; публикации патента США № 2014/0239036, озаглавленной «Jaw Closure Feature for End Effector of Surgical Instrument», опубликованной 28 августа 2014 г.; публикации патента США № 2014/0239040, озаглавленной «Surgical Instrument with Articulation Lock having a Detenting Binary Spring», опубликованной 28 августа 2014 г.; публикации патента США № 2014/0239043, озаглавленной «Distal Tip Features for End Effector of Surgical Instrument», опубликованной 28 августа 2014 г.; публикации патента США № 2014/0239037, озаглавленной «Staple Forming Features for Surgical Stapling Instrument», опубликованной 28 августа 2014 г.; публикации патента США № 2014/0239038, озаглавленной «Surgical Instrument with Multi-Diameter Shaft», опубликованной 28 августа 2014 г.; и в публикации патента США № 2014/0239044, озаглавленной «Installation Features for Surgical Instrument End Effector Cartridge», опубликованной 28 августа 2014 г. Описание каждой из процитированных выше патентных заявок США включено в настоящий документ путем ссылки.
Несмотря на то что были изготовлены и применялись различные типы хирургических сшивающих инструментов и связанных с ними компонентов, считается, что до автора (-ов) изобретения никто не изготавливал или не применял изобретение, описанное в приложенной формуле изобретения.
КРАТКОЕ ОПИСАНИЕ РИСУНКОВ
Сопровождающие рисунки, включенные в настоящее описание и составляющие его неотъемлемую часть, иллюстрируют варианты осуществления изобретения и в сочетании с приведенным выше общим описанием изобретения и приведенным ниже подробным описанием вариантов осуществления призваны разъяснить принципы настоящего изобретения.
На ФИГ. 1 показан вид в перспективе примера шарнирного хирургического сшивающего инструмента;
на ФИГ. 2 показан вид сбоку в вертикальной проекции инструмента, изображенного на ФИГ. 1;
на ФИГ. 3 показан вид в перспективе концевого эффектора инструмента, изображенного на ФИГ. 1, с концевым эффектором в закрытой конфигурации;
на ФИГ. 4 показан вид в перспективе концевого эффектора, изображенного на ФИГ. 3, с концевым эффектором в открытой конфигурации;
на ФИГ. 5 показан вид в перспективе с пространственным разделением компонентов концевого эффектора, изображенного на ФИГ. 3;
на ФИГ. 6 показан вид с торца в поперечном сечении концевого эффектора, изображенного на ФИГ. 3, вдоль линии 6-6 на ФИГ. 4;
на ФИГ. 7A показан вид сбоку в поперечном сечении концевого эффектора, изображенного на ФИГ. 3, вдоль линии 7-7 на ФИГ. 4 с пусковой штангой в проксимальном положении;
на ФИГ. 7B показан вид сбоку в поперечном сечении концевого эффектора, изображенного на ФИГ. 3, вдоль линии 7-7 на ФИГ. 4 с пусковой штангой в дистальном положении;
на ФИГ. 8 показан вид в перспективе концевого эффектора, изображенного на ФИГ. 3, расположенного в ткани и активированного после размещения в ткани;
На ФИГ. 9 показан вид сбоку в вертикальной проекции другого примера шарнирного хирургического сшивающего инструмента;
на ФИГ. 10 показан вид в перспективе концевого эффектора инструмента, изображенного на ФИГ. 9, с концевым эффектором в открытой конфигурации;
на ФИГ. 11 показан вид сверху второй бранши концевого эффектора, изображенного на ФИГ. 10;
на ФИГ. 12 показан вид снизу первой бранши концевого эффектора, изображенного на ФИГ. 10;
на ФИГ. 13 показан вид в перспективе с пространственным разделением компонентов второй бранши, изображенной на ФИГ. 11;
на ФИГ. 14 показан вид сбоку в поперечном разрезе клиновидных салазок, изображенных на ФИГ. 13 во втором продольном положении, причем узлы тройного выталкивателя, изображенные на ФИГ. 13 находятся в верхнем положении, в основном вдоль центральной линии второй бранши, изображенной на ФИГ. 11;
на ФИГ. 15 представлен вид в перспективе второй бранши, изображенной на ФИГ. 11, в частичном поперечном сечении, вдоль линии сечения 15-15, изображенной на ФИГ. 11;
на ФИГ. 16A представлено схематическое изображение печени, имеющей сосуд, проходящий через ткань печени;
на ФИГ. 16B представлено схематическое изображение концевого эффектора, изображенного на ФИГ. 10, рассекающего ткань печени, изображенной на ФИГ. 16A;
на ФИГ. 16C представлено схематическое изображение сосуда, изображенного на ФИГ. 16B, который выходит из ткани рассеченной печени, изображенной на ФИГ. 16A;
на ФИГ. 16D представлено схематическое изображение концевого эффектора, изображенного на ФИГ. 10, сшивающего выходящий сосуд, изображенный на ФИГ. 16C; и
на ФИГ. 16E представлено схематическое изображение печени, изображенной на ФИГ. 16A, имеющей резецированную часть ткани печени и сосуда.
Предполагается, что рисунки не имеют какого-либо ограничительного характера, и считается, что различные варианты осуществления изобретения могут быть реализованы множеством других способов, включая те, которые не обязательно показаны на рисунках. Сопроводительные рисунки включены в настоящее описание и образуют его часть для иллюстрации нескольких аспектов настоящего изобретения и вместе с описанием служат для пояснения принципов изобретения; однако следует понимать, что настоящее изобретение не ограничено точными показанными конструкциями.
ПОДРОБНОЕ ОПИСАНИЕ
Представленное ниже описание некоторых примеров изобретения не следует применять для ограничения объема настоящего изобретения. Другие примеры, элементы, аспекты, варианты осуществления и преимущества изобретения будут очевидны специалистам в данной области из представленного ниже описания, в котором для иллюстрации показан один из наилучших предполагаемых способов реализации изобретения. Как будет понятно, изобретение может быть реализовано с разными другими очевидными аспектами, все из которых не отклоняются от изобретения. Соответственно, рисунки и описания следует рассматривать как по своей сути иллюстративные, а не ограничивающие.
I. Пример хирургического сшивающего инструмента
На ФИГ. 1 показан пример хирургического сшивающего и рассекающего инструмента (10), который включает в себя узел рукоятки (20), узел ствола (30) и концевой эффектор (40). Концевой эффектор (40) и дистальный участок узла ствола (30) по размеру выполнены с возможностью введения в состоянии без шарнирного поворота, как показано на ФИГ. 1, через канюлю троакара в хирургическое поле в организме пациента для проведения хирургического вмешательства. Исключительно для примера, такой троакар можно ввести в брюшную полость пациента, между двумя ребрами пациента или в другое место. В некоторых обстоятельствах инструмент (10) применяют без троакара. Например, концевой эффектор (40) и дистальный участок узла ствола (30) могут быть введены непосредственно через торакотомический или другой тип разреза. Следует понимать, что термины, такие как «проксимальный» и «дистальный», в настоящем документе применяются по отношению к врачу, удерживающему узел рукоятки (20) инструмента (10). Таким образом, концевой эффектор (40) находится дистально по отношению к более проксимальному узлу рукоятки (20). Следует также понимать, что для удобства и ясности такие пространственные термины, как «вертикальный» и «горизонтальный», применяются в настоящем документе в отношении рисунков. Однако хирургические инструменты применяются во множестве ориентаций и положений, и эти термины не являются ограничивающими и абсолютными.
A. Пример узла рукоятки и узла ствола
Как показано на ФИГ. 1-2, узел рукоятки (20) настоящего примера содержит пистолетную рукоятку (22), закрывающий спусковой механизм (24) и пусковой крючок (26). Каждый пусковой крючок (24, 26) можно избирательно поворачивать к пистолетной рукоятке (22) и от нее, как будет более подробно описано ниже. Узел рукоятки (20) дополнительно включает в себя кнопку (25) высвобождения упора, переключатель (27) смены направления пусковой штанги и сменную аккумуляторную батарею (28). Эти компоненты будут также более подробно описаны ниже. Конечно, узел рукоятки (20) может содержать множество других компонентов, элементов и функциональных возможностей в дополнение или вместо любых из перечисленных выше. В свете идей, представленных в настоящем документе, обычным специалистам в данной области будут очевидны другие приемлемые конфигурации узла рукоятки (20).
Как показано на ФИГ. 1-3, узел ствола (30) настоящего примера содержит внешнюю закрывающую трубку (32), шарнирную секцию (34) и закрывающее кольцо (36), которые дополнительно соединены с концевым эффектором (40). Закрывающая трубка (32) проходит вдоль длины узла ствола (30). Закрывающее кольцо (36) расположено дистально по отношению к шарнирной секции (34). Закрывающая трубка (32) и закрывающее кольцо (36) выполнены с возможностью поступательного перемещения продольно относительно узла рукоятки (20). Продольное поступательное перемещение закрывающей трубки (32) передается на закрывающее кольцо (36) посредством шарнирной секции (34). Примеры элементов, которые могут применяться для обеспечения продольного поступательного перемещения закрывающей трубки (32) и закрывающего кольца (36), будут более подробно описаны ниже.
Шарнирная секция (34) выполнена с возможностью отклонения в боковом направлении закрывающего кольца (36) и концевого эффектора (40) в боковом направлении от продольной оси (LA) узла ствола (30) на заданный угол (α). Таким образом, концевой эффектор (40) можно завести за орган или приблизить к ткани под заданным углом или по другим причинам. В некоторых вариантах шарнирная секция (34) допускает отклонение концевого эффектора (40) вдоль одной плоскости. В некоторых других вариантах шарнирная секция (34) допускает отклонение концевого эффектора вдоль более чем одной плоскости. В настоящем примере шарнирный поворот контролируется посредством ручки (35) управления шарниром, которая находится на проксимальном конце узла ствола (30). Ручка (35) выполнена с возможностью вращения вокруг оси, перпендикулярной продольной оси (LA) узла ствола (30). Закрывающее кольцо (36) и концевой эффектор (40) поворачиваются вокруг оси, которая перпендикулярна продольной оси (LA) узла ствола (30) в ответ на вращение ручки (35). Исключительно для примера, вращение ручки (35) по часовой стрелке может приводить к соответствующему повороту по часовой стрелке закрывающего кольца (36) и концевого эффектора (40) в шарнирной секции (34). Шарнирная секция (34) выполнена с возможностью передачи продольного поступательного перемещения закрывающей трубки (32) на закрывающее кольцо (36) независимо от того, находится ли шарнирная секция (34) в прямой конфигурации или в шарнирно повернутой конфигурации.
В некоторых вариантах шарнирная секция (34) и/или ручка (35) управления шарниром сконструирована (-ы) и выполнена (-ы) с возможностью эксплуатации в соответствии с по меньшей мере некоторыми из идей, представленных в публикации США № 2014/0243801, озаглавленной «Surgical Instrument End Effector Articulation Drive with Pinion and Opposing Racks», опубликованной 28 августа 2014 г., описание которой включено в настоящий документ путем ссылки. Шарнирная секция (34) также может быть сконструирована и выполнена с возможностью эксплуатации в соответствии с по меньшей мере некоторыми из идей, представленных в патентной заявке США № 14/314,125, озаглавленной «Articulation Drive Features for Surgical Stapler», поданной 25 июня 2014 г., описание которой включено в настоящий документ путем ссылки; и/или в соответствии с различными идеями, представленными ниже. В свете идей, представленных в настоящем документе, обычным специалистам в данной области будут очевидны другие приемлемые формы, которые могут принимать шарнирная секция (34) и ручка (35) управления шарниром.
Как показано на ФИГ. 1-2, узел ствола (30) настоящего примера дополнительно включает в себя поворотную ручку (31). Поворотная ручка (31) выполнена с возможностью вращения всего узла ствола (30) и концевого эффектора (40) относительно узла рукоятки (20) вокруг продольной оси (LA) узла ствола (30). В некоторых версиях поворотная ручка (31) выполнена с возможностью избирательной фиксации углового положения узла ствола (30) и концевого эффектора (40) относительно узла рукоятки (20) вокруг продольной оси (LA) узла ствола (30). Например, поворотная ручка (31) может быть выполнена с возможностью поступательного перемещения между первым продольным положением, в котором узел ствола (30) и концевой эффектор (40) могут вращаться относительно узла рукоятки (20) вокруг продольной оси (LA) узла ствола (30); и вторым продольным положением, в котором узел ствола (30) и концевой эффектор (40) не выполнены с возможностью вращения относительно узла рукоятки (20) вокруг продольной оси (LA) узла ствола (30). Конечно, узел ствола (30) может иметь разнообразные другие компоненты, элементы и функциональные возможности в дополнение или вместо любых из перечисленных выше. Исключительно для примера, по меньшей мере часть узла ствола (30) сконструирована в соответствии с по меньшей мере некоторыми из идей, представленных в публикации США № 2014/0239038, озаглавленной «Surgical Instrument with Multi-Diameter Shaft», опубликованной 28 августа 2014 г., описание которой включено в настоящий документ путем ссылки. В свете идей, представленных в настоящем документе, обычным специалистам в данной области будут очевидны другие приемлемые конфигурации узла ствола (30).
B. Пример концевого эффектора
Как показано на ФИГ. 3-5, концевой эффектор (40) настоящего примера включает в себя вторую браншу (50) и упор (60), выполненный с возможностью поворота. Упор (60) включает в себя пару выполненных за одно целое и проходящих наружу штифтов (66), которые расположены в соответствующих криволинейных пазах (54) второй бранши (50). Упор (60) выполнен с возможностью поворота к второй бранше (50) и от нее между открытым положением (показано на ФИГ. 2 и 4) и закрытым положением (показано на ФИГ. 1, 3 и 7А-7В). Применение термина «выполненный с возможностью поворота» (и аналогичных терминов с основой «поворачивать») не следует воспринимать как требующее обязательного поворотного перемещения вокруг неподвижной оси. Например, в настоящем примере упор (60) поворачивается вокруг оси, которая образована штифтами (66), скользящими вдоль криволинейных пазов (54) второй бранши (50) при перемещении упора (60) ко второй бранше (50). В таких вариантах ось поворота поступательно перемещается вдоль траектории, образованной пазами (54), при одновременном повороте упора (60) вокруг этой оси. В дополнение или в качестве альтернативы ось поворота может сначала скользить вдоль пазов (54), а затем упор (60) поворачивается вокруг оси вращения, после того как ось вращения переместилась на некоторое расстояние вдоль пазов (54). Следует понимать, что такое поворотное перемещение в виде скользящего/поступательного перемещения охватывается такими терминами, как «поворачиваться», «поворачивается», «поворотный», «выполненный с возможностью поворота», «поворачивающийся» и т. п. Конечно, некоторые варианты могут обеспечивать поворотное перемещение упора (60) вокруг оси, которая остается неподвижной и не перемещается поступательно внутри паза или канала и т. д.
Как лучше всего показано на ФИГ. 5, вторая бранша (50) настоящего примера образует канал (52), который выполнен с возможностью приема кассеты (70) со скобами. Кассету (70) со скобами можно ввести в канал (52), концевой эффектор (40) может быть приведен в действие, а затем кассету (70) со скобами можно извлечь и заменить на другую кассету (70) со скобами. Таким образом вторая бранша (50) высвобождаемо удерживает кассету (70) со скобами в совмещении с упором (60) для приведения в действие концевого эффектора (40). В некоторых вариантах вьлоая бранша (50) может быть сконструирована в соответствии с по меньшей мере некоторыми из идей, представленных в публикации США № 2014/0239044, озаглавленной «Installation Features for Surgical Instrument End Effector Cartridge», опубликованной 28 августа 2014 г., описание которой включено в настоящий документ путем ссылки. Другие приемлемые формы этой второй бранши (50) будут очевидны обычным специалистам в данной области в свете идей, представленных в настоящем документе.
Как лучше всего показано на ФИГ. 4-6, кассета (70) со скобами настоящего примера имеет корпус (71) кассеты и лоток (76), закрепленный на нижней стороне корпуса (71) кассеты. Верхняя сторона корпуса (71) кассеты представляет собой платформу (73), к которой может прижиматься ткань, когда упор (60) находится в закрытом положении. В корпусе (71) кассеты дополнительно образован продольный канал (72) и множество углублений (74) для скоб. Скоба (77) расположена в каждом углублении (74) для скобы. В каждом углублении (74) для скобы также расположен выталкиватель (75) скоб, который находится под соответствующей скобой (77) и над лотком (76). Как будет более подробно описано ниже, выталкиватели (75) скоб выполнены с возможностью поступательного перемещения вверх в углубления (74) для скоб, чтобы таким образом подавать скобы (77) вверх через углубления (74) для скоб и во взаимодействие с упором (60). Выталкиватели (75) скоб подаются вверх клиновидными салазками (78), которые захватываются между корпусом (71) кассеты и лотком (76) и которые продольно перемещаются поступательно через корпус (71) кассеты. Клиновидные салазки (78) включают в себя пару наклоненных под углом кулачковых поверхностей (79), которые выполнены с возможностью взаимодействия с выталкивателями (75) скоб и при этом подачи выталкивателей (75) скоб вверх, по мере того как клиновидные салазки (78) продольно перемещаются поступательно через кассету (70). Например, когда клиновидные салазки (78) находятся в проксимальном положении, как показано на ФИГ. 7А, выталкиватели (75) скоб находятся в нижних положениях, а скобы (77) расположены в углублениях (74) для скоб. По мере того как клиновидные салазки (78) приводятся в движение в дистальном положении, показанном на ФИГ. 7В, за счет поступательного перемещения скальпельного элемента (80) клиновидные салазки (78) приводят в движение выталкиватели (75) скоб вверх, таким образом подавая скобы (77) из углублений (74) для скоб в формирующие скобу углубления (64). Таким образом, выталкиватели (75) скоб поступательно перемещаются вдоль вертикального направления, по мере того как клиновидные салазки (78) поступательно перемещаются вдоль горизонтального направления.
Следует понимать, что конфигурация кассеты (70) со скобами может быть изменена различными способами. Например, кассета (70) со скобами настоящего примера включает в себя два продольно проходящих ряда углублений (74) для скоб с одной стороны канала (72) и второй набор двух продольно проходящих рядов углублений (74) для скоб с другой стороны канала (72). Однако в некоторых других вариантах кассета (70) со скобами включает в себя три, одно или некоторое другое число углублений (74) для скоб с каждой стороны канала (72). В некоторых вариантах кассета (70) со скобами сконструирована и выполнена с возможностью эксплуатации в соответствии с по меньшей мере некоторыми из идей, представленных в публикации США № 2014/0239042, озаглавленной «Integrated Tissue Positioning and Jaw Alignment Features for Surgical Stapler», поданной 28 августа 2014 г., описание которой включено в настоящий документ путем ссылки. В дополнение или в качестве альтернативы кассета (70) со скобами может быть сконструирована и выполнена с возможностью эксплуатации в соответствии с по меньшей мере некоторыми из идей, представленных в публикации США № 2014/0239044, озаглавленной «Installation Features for Surgical Instrument End Effector Cartridge», опубликованной 28 августа 2014 г., описание которой включено в настоящий документ путем ссылки. В свете идей, представленных в настоящем документе, обычным специалистам в данной области будут очевидны другие приемлемые формы этой кассеты (70) со скобами.
Как лучше всего показано на ФИГ. 4, упор (60) настоящего примера содержит продольный канал (62) и множество формирующих скобу углублений (64). Канал (62) выполнен с возможностью совмещения с каналом (72) кассеты (70) со скобами, когда упор (60) находится в закрытом положении. Каждое формирующее скобу углубление (64) расположено таким образом, что оно лежит над соответствующим углублением (74) для скобы кассеты (70) со скобами, когда упор (60) находится в закрытом положении. Формирующие скобу углубления (64) выполнены с возможностью деформации ножек (77) скоб, когда скобы (77) подаются через ткань и в упор (60). В частности, формирующие скобу углубления (64) выполнены с возможностью сгиба ножек (77) скоб для закрепления сформированных скоб (77) в ткани. Упор (60) может быть сконструирован в соответствии с по меньшей мере некоторыми из идей, представленных в публикации США № 2014/0239042, озаглавленной «Integrated Tissue Positioning and Jaw Alignment Features for Surgical Stapler», опубликованной 28 августа 2014 г.; по меньшей мере некоторыми из идей, представленных в публикации США № 2014/0239036, озаглавленной «Jaw Closure Feature for End Effector of Surgical Instrument», опубликованной 28 августа 2014 г.; и/или по меньшей мере некоторыми из идей, представленных в публикации США № 2014/0239037, озаглавленный «Staple Forming Features for Surgical Stapling Instrument», поданной 28 августа 2014 г., описание которой включено в настоящий документ путем ссылки. Другие приемлемые формы этого упора (60) будут очевидны обычным специалистам в данной области в свете идей, представленных в настоящем документе.
В настоящем примере скальпельный элемент (80) выполнен с возможностью поступательного перемещения через концевой эффектор (40). Как лучше всего показано на ФИГ. 5 и 7A-7B, скальпельный элемент (80) закреплен на дистальном конце пусковой штанги (82), которая проходит через участок узла ствола (30). Как лучше всего показано на ФИГ. 4 и 6, скальпельный элемент (80) расположен в каналах (62, 72) упора (60) и кассеты (70) со скобами. Скальпельный элемент (80) включает в себя расположенный дистально режущий край (84), который выполнен с возможностью рассечения ткани, сжатой между упором (60) и платформой (73) кассеты (70) со скобами, по мере того как скальпельный элемент (80) поступательно перемещается в дистальном направлении через концевой эффектор (40). Как отмечено выше и как показано на ФИГ. 7А-7В, скальпельный элемент (80) также приводит в движение клиновидные салазки (78) в дистальном направлении по мере того как скальпельный элемент (80) поступательно перемещается в дистальном направлении через концевой эффектор (40), таким образом подавая скобы (77) через ткань и к упору (60) для формирования. Различные элементы, которые могут применяться для приведения в движение скальпельного элемента (80) в дистальном направлении через концевой эффектор (40), будут более подробно описаны ниже.
В некоторых вариантах концевой эффектор (40) включает в себя блокирующие элементы, выполненные с возможностью предотвращения продвижения скальпельного элемента (80) в дистальном направлении через концевой эффектор (40), когда кассета (70) со скобами не вставлена во второй бранше (50). В дополнение или в качестве альтернативы концевой эффектор (40) может содержать блокирующие элементы, выполненные с возможностью предотвращения продвижения скальпельного элемента (80) в дистальном направлении через концевой эффектор (40), когда кассета (70) со скобами, которая уже была однажды приведена в действие (например, при размещении всех скоб (77) из нее), вставлена во вторую браншу (50). Исключительно для примера, такие блокирующие элементы могут быть выполнены в соответствии с по меньшей мере некоторыми из идей, представленных в публикации США № 2014/0239041, озаглавленной «Lockout Feature for Movable Cutting Member of Surgical Instrument», поданной 28 августа 2014 г., описание которой включено в настоящий документ путем ссылки; и/или с по меньшей мере некоторыми из идей, представленных в патентной заявке США № 14/314,108, озаглавленной «Method of Using Lockout Features for Surgical Staple cartridge», поданной 25 июня 2014 г., описание которой включено в настоящий документ путем ссылки. Другие приемлемые формы этих блокирующих элементов будут очевидны обычным специалистам в данной области в свете идей, представленных в настоящем документе. Альтернативно концевой эффектор (40) может просто не содержать таких блокирующих элементов.
C. Пример приведения упора в действие
В настоящем примере упор (60) приводится в движение ко второй бранше (50) путем продвижения закрывающего кольца (36) в дистальном направлении по отношению к концевому эффектору (40). Закрывающее кольцо (36) взаимодействует с упором (60) посредством торцевого биения, чтобы привести упор (60) в движение ко второй бранше (50) в ответ на дистальное поступательное перемещение закрывающего кольца (36) относительно концевого эффектора (40). Аналогичным образом, закрывающее кольцо (36) может взаимодействовать с упором (60) для отведения упора (60) от второй бранши (50) в ответ на проксимальное поступательное перемещение закрывающего кольца (36) относительно концевого эффектора (40). Исключительно для примера, закрывающее кольцо (36) и упор (60) могут взаимодействовать в соответствии с по меньшей мере некоторыми из идей, представленных в публикации США № 2014/0239036, озаглавленной «Jaw Closure Feature for End Effector of Surgical Instrument», опубликованной 28 августа 2014 г., описание которой включено в настоящий документ путем ссылки; и/или в соответствии с по меньшей мере некоторыми из идей, представленных в патентной заявке США № 14/314,108, озаглавленной «Jaw Opening Feature for Surgical Stapler», поданной 25 июня 2014 г., описание которой включено в настоящий документ путем ссылки. Примеры элементов, которые могут применяться для обеспечения продольного поступательного перемещения закрывающего кольца (36) относительно концевого эффектора (40), будут более подробно описаны ниже.
Как отмечено выше, узел рукоятки (20) включает в себя пистолетную рукоятку (22) и закрывающий спусковой механизм (24). Как также отмечено выше, упор (60) закрывается в направлении второй бранши (50) в ответ на дистальное продвижение закрывающего кольца (36). В настоящем примере закрывающий спусковой механизм (24) может поворачиваться к пистолетной рукоятке (22), приводя в движение закрывающую трубку (32) и закрывающее кольцо (36) в дистальном направлении. Различные приемлемые компоненты, которые могут применяться для преобразования поворотного перемещения закрывающего спускового механизма (24) к пистолетной рукоятке (22) в дистальное поступательное перемещение закрывающей трубки (32) и закрывающего кольца (36) относительно узла рукоятки (20), в свете приведенных в настоящем документе идей будут очевидны обычным специалистам в данной области. Когда закрывающий спусковой механизм (24) доходит до полностью повернутого состояния, так что упор (60) находится в полностью закрытом положении относительно второй бранши (50), блокирующие элементы в узле рукоятки (20) фиксируют положение закрывающего спускового механизма (24) и закрывающей трубки (32), таким образом фиксируя упор (60) в полностью закрытом положении относительно второй бранши (50). Эти блокирующие элементы высвобождаются за счет приведения в действие кнопки (25) высвобождения упора. Кнопка (25) высвобождения упора выполнена с возможностью и расположена так, чтобы приводиться в действие большим пальцем руки оператора, который удерживает пистолетную рукоятку (22). Иными словами, оператор может удерживать пистолетную рукоятку (22) одной рукой, приводить в действие закрывающий спусковой механизм (24) одним или более пальцами той же руки, а затем приводить в действие кнопку (25) высвобождения упора большим пальцем той же руки без необходимости ослаблять захват пистолетной рукоятки (22) той же рукой. Другие приемлемые элементы, которые могут применяться для приведения в действие упора (60), будут очевидны обычным специалистам в данной области в свете идей, представленных в настоящем документе.
D. Пример приведения пусковой штанги в действие
В настоящем примере инструмент (10) обеспечивает управление пусковой штанги (82) с помощью двигателя. В частности, инструмент (10) включает в себя компоненты с двигателем, которые выполнены с возможностью приведения в движение пусковой штанги (82) в дистальном направлении в ответ на поворот пускового крючка (26) к пистолетной рукоятке (22). В некоторых вариантах двигатель (не показан) содержится в пистолетной рукоятке (22) и получает питание от аккумуляторной батареи (28). Данный двигатель соединен с узлом трансмиссии (не показан), который преобразует вращательное движение приводного вала двигателя в линейное поступательное перемещение пусковой штанги (82). В некоторых таких версиях пусковая штанга (82) может продвигаться в дистальном направлении только в том случае, когда упор (60) находится в полностью закрытом положении относительно второй бранши (50). После того как пусковая штанга (82) продвигается в дистальном направлении для рассечения ткани и подачи скоб (77), как описано выше в отношении ФИГ. 7А-7В, узел привода для пусковой штанги (82) может автоматически переходить в режим реверса, чтобы приводить в движение пусковую штангу (82) проксимально назад во втянутое положение (например, назад из положения, показанного на ФИГ. 7В, в положение, показанное на ФИГ. 7А). Альтернативно оператор может приводить в действие переключатель (27) смены направления пусковой штанги, который может переводить в режим реверса узел привода для пусковой штанги (82), чтобы втянуть пусковую штангу (82) в проксимальное положение. Узел рукоятки (20) настоящего примера дополнительно включает в себя аварийный элемент (21), который выполнен с возможностью обеспечения механических аварийных действий, позволяя оператору вручную втягивать пусковую штангу (82) проксимально (например, в случае сбоя питания в момент, когда пусковая штанга (82) находится в дистальном положении, и т. д.).
Исключительно в качестве примера, элементы, выполненные с возможностью обеспечивать приведение в действие пусковой штанги (82) с помощью двигателя, могут быть выполнены с возможностью и могут эксплуатироваться в соответствии с по меньшей мере некоторыми из идей патента США № 8,210,411, озаглавленного «Motor-Driven Surgical Instrument», выданного 3 июля 2012 г., описание которого включено в настоящий документ путем ссылки. В другом исключительно иллюстративном примере элементы, выполненные с возможностью обеспечивать приведение в действие пусковой штанги (82) с помощью двигателя, могут быть выполнены с возможностью и могут эксплуатироваться в соответствии с по меньшей мере некоторыми из идей патента США № 8,453,914, озаглавленного «Motor-Driven Surgical Cutting Instrument with Electric Actuator Directional Control Assembly», выданного 4 июня 2013 г., описание которого включено в настоящий документ путем ссылки. В еще одном исключительно иллюстративном примере элементы, выполненные с возможностью обеспечивать приведение в действие пусковой штанги (82) с помощью двигателя, могут быть выполнены с возможностью и могут эксплуатироваться в соответствии с по меньшей мере некоторыми из идей патентной заявки США № 14/226,142, озаглавленной «Surgical Instrument Comprising a Sensor System», поданной 26 марта 2014 г., описание которой включено в настоящий документ путем ссылки.
В свете идей, представленных в настоящем документе, обычным специалистам в данной области будут очевидны другие приемлемые компоненты, элементы и конфигурации, которые могут применяться для обеспечения использования двигателя для пусковой штанги (82). Также следует понимать, что некоторые другие варианты могут обеспечивать ручную подачу пусковой штанги (82), так что двигатель можно не использовать. Исключительно для примера, пусковая штанга (82) может приводиться в действие вручную в соответствии с по меньшей мере некоторыми из идей из любого другого источника, процитированного в настоящем документе.
На ФИГ. 8 показан концевой эффектор (40), который был приведен в действие на один ход через ткань (90). Как показано, режущий край (84) (скрыт на ФИГ. 8) разрезал ткань (90), а выталкиватели (75) скоб подали через ткань (90) два чередующихся ряда скоб (77) с каждой стороны созданной режущим краем (84) линии разреза. В этом примере все скобы (77) ориентированы по существу параллельно линии разреза, хотя следует понимать, что скобы (77) могут быть расположены в любых приемлемых ориентациях. В настоящем примере концевой эффектор (40) извлекают из троакара после завершения первого хода, израсходованную кассету (70) со скобами заменяют на новую кассету со скобами (70), а затем концевой эффектор (40) повторно вводят через троакар для получения доступа к месту сшивания для дальнейшего разрезания и сшивания скобами. Этот процесс можно повторять до тех пор, пока не будет обеспечено заданное число разрезов и сшиваний скобами (77). Для облегчения введения и извлечения через троакар может потребоваться закрыть упор (60); а для упрощения замены кассеты (70) со скобами может потребоваться открыть упор (60).
Следует понимать, что режущий край (84) может разрезать ткань по существу одновременно с подачей скоб (77) через ткань во время каждого хода по приведению в действие. В настоящем примере режущий край (84) лишь немного отстает от подачи скоб (77), так что скоба (77) подается через ткань непосредственно перед тем, как режущий край (84) пройдет через ту же область ткани, хотя следует понимать, что этот порядок может быть изменен на обратный, а также, что режущий край (84) может быть непосредственно синхронизирован со смежными скобами. Хотя на ФИГ. 8 показан концевой эффектор (40), приведенный в действие в двух слоях (92, 94) ткани (90), следует понимать, что концевой эффектор (40) может быть приведен в действие через один слой ткани (90) или более двух слоев (92, 94) ткани. Следует также понимать, что формирование и позиционирование скоб (77) смежно с линией разреза, сформированной режущим краем (84), может по существу герметизировать ткань по линии разреза, таким образом уменьшая или предотвращая кровотечение и/или просачивание других биологических текучих сред по линии разреза. Более того, хотя на ФИГ. 8 показан концевой эффектор (40), приведенный в действие в двух по существу плоских, сближенных и лежащих в одной плоскости слоях (92, 94) ткани, следует понимать, что концевой эффектор (40) также можно приводить в действие через трубчатую структуру, такую как кровеносный сосуд, отдел желудочно-кишечного тракта и т. д. Таким образом, ФИГ. 8 не следует рассматривать как демонстрирующую какие-либо ограничения предполагаемых способов применения концевого эффектора (40). В свете идей, представленных в настоящем документе, обычным специалистам в данной области будут очевидны различные приемлемые обстоятельства и вмешательства, во время которых можно применять инструмент (10).
Следует понимать, что любые другие компоненты или элементы инструмента (10) могут быть выполнены с возможностью и могут эксплуатироваться в соответствии с любыми из различных ссылок, процитированных в настоящем документе. Дополнительные примеры модификаций, которые могут быть обеспечены для инструмента (10), будут более подробно описаны ниже. Обычным специалистам в данной области будут очевидны различные приемлемые способы, которыми приведенные ниже идеи могут быть включены в инструмент (10). Аналогичным образом, обычным специалистам в данной области будут очевидны различные приемлемые способы, в соответствии с которыми представленные ниже идеи могут быть скомбинированы с различными идеями по ссылкам, процитированным в настоящем документе. Следует также понимать, что приведенные ниже идеи не ограничены инструментом (10) или устройствами, описанными в ссылках, процитированных в настоящем документе. Приведенные ниже идеи можно легко применять к различным другим типам инструментов, включая инструменты, которые не классифицируются как хирургические сшивающие инструменты. В свете идей, представленных в настоящем документе, обычным специалистам в данной области будут очевидны различные другие приемлемые устройства и обстоятельства, в которых можно применять изложенные ниже идеи.
II. Пример альтернативного концевого эффектора сшивающего инструмента
Хотя в описанном выше хирургическом инструменте (10) представлен один пример концевого эффектора (40), который можно использовать для сшивания и рассечения ткани в теле пациента, следует понимать, что тело человека состоит из множества тканей, расположенных в различных областях тела пациента, к которым бывает сложно получить доступ. Например, печень содержит ткань, включая сосуды или протоки, проходящие через нее. В условиях, когда печень содержит опухоль, может потребоваться резекция части печени, содержащей опухоль. Резекция может быть анатомической (например, резекция правой или левой стороны печени, включая доли на той стороне) или не атомической (например, резекция только одной доли или клина ткани печени). Этот процесс резекции может повлечь за собой по меньшей мере три вида этапов - первый этап заключается в рассечении ткани (например, паренхимы печени) вокруг сосудов или протоков, чтобы таким образом изолировать или выявить сосуды или протоки; второй этап заключается в лигировании сосудов или протоков; и третий этап заключается в рассечении лигированных сосудов или протоков.
Один из таких способов резекции печени включает хорошо известный способ с применением зажима Келли, в котором зажим Келли используется для сжатия ткани печени и, таким образом, рассечения ткани путем раздавливания. Однако для лечения такого широкого разнообразия тканей, сосудов или протоков в человеческом организме может потребоваться множество инструментов, в результате чего увеличивается время и сложность, связанные с оценкой состояния ткани, выбором и/или заменой инструментов и выполнением резекции. Поэтому может быть желательным обеспечить хирургический инструмент (410) с концевым эффектором (412), имеющим пару раздавливающих поверхностей (414, 416), выполненных с возможностью рассечения ткани путем раздавливания ткани; в то же время обеспечивая смежную кассету (418) со скобами для избирательного лигирования одного или более сосудов или протоков, проходящих через ткань. Таким образом, один хирургический инструмент (410) позволит оператору более быстро оценить ткань и продолжить дальнейшее рассечение ткани и/или лигирование сосудов и протоков.
Хирургические инструменты (410) описаны ниже в контексте рассечения ткани печени (например, паренхимы печени) с раздавливающими поверхностями (414, 416) и с использованием скоб для лигирования соответствующих сосудов или протоков (например, воротной вены, ветвей печеночной вены, ветвей печеночной артерии, внепеченочных сосудов и т. д.). В некоторых случаях (например, в случае ветвей печеночной вены и ветвей печеночной артерии и т. д.) сосуд или канал, герметизированный скобами, подвергается воздействию, когда оператор раздавливает ткань печени поверхностями (414, 416). В некоторых случаях (например, в случае воротной вены и внепеченочных сосудов и т. д.) сосуд или канал, герметизированный скобами, отделен от ткани печени, которую оператор раздавил поверхностями (414, 416). Хотя нижеследующее описание хирургических инструментов (410) и способа лечения представлено в контексте резекции печени, следует понимать, что хирургические инструменты (410) в альтернативном варианте осуществления могут быть выполнены с возможностью лечения любой ткани в организме человека, имеющей аналогичные характеристики. Следует также понимать, что изложенные ниже характеристики могут быть легко осуществлены в хирургическом инструменте (10), описанном выше. С этой целью подобные числа указывают на подобные характеристики, более подробно описанные выше.
В следующих примерах концевые эффекторы (412) применяют по меньшей мере два разнесенных латерально ряда скоб, в которых скобы в одном ряду имеют такую же высоту, как и скобы в другом ряду. В некоторых вариантах концевые эффекторы (412) модифицированы для применения по меньшей мере двух разнесенных латерально рядов скоб, в которых скобы в одном ряду имеют высоту, которая отличается от высоты скоб в другом ряду.
A. Пример сшивающего инструмента с укороченным прямым концевым эффектором
На ФИГ. 9-13 показан хирургический инструмент (410) с концевым эффектором (412), имеющим верхнюю раздавливающую поверхность (414), нижнюю раздавливающую поверхность (416), кассету со скобами (418) и скальпельный элемент (419). Как отмечено выше, может быть желательным обеспечить такой хирургический инструмент (410) с концевым эффектором (412), имеющим раздавливающие поверхности (414, 416), выполненные с возможностью рассечения ткани путем раздавливания ткани; в то же время обеспечивая смежную кассету (418) со скобами для избирательного лигирования одного или более сосудов, проходящих через ткань. Кроме того, скальпельный элемент (419) выполнен с возможностью разрезания одного или более сосудов для полного удаления окружающей ткани. Таким образом, хирургический инструмент (410) позволит оператору более быстро получить доступ к ткани и продолжить дальнейшее рассечение ткани и/или лигирование ткани. Хирургический инструмент (410) настоящего примера также включает в себя узел рукоятки (20) и узел ствола (30), которые более подробно описаны выше. За исключением случаев, описанных ниже, концевой эффектор (412) в сочетании с узлом рукоятки (20) и узлом ствола (30) выполнен и работает аналогично концевому эффектору (40) (см. ФИГ. 1). Только в качестве примера концевой эффектор (412) может иметь длину приблизительно 40 мм и ширину приблизительно 7 мм. Альтернативно можно применять любой другой подходящий размер.
Концевой эффектор (412) настоящего примера включает в себя вторую браншу (420) и первую браншу (422), которая формирует упор (424). Первая бранша (422) установлена с возможностью поворота относительно второй бранши (420) для приема между ними ткани. Более конкретно, упор (424) выполнен с возможностью поворота ко второй бранше (420) и от нее между открытым положением и закрытым положением (например, в ответ на поворотное перемещение спускового механизма (24) к пистолетной рукоятке (22) и от нее). Например, в настоящем примере упор (424) поворачивается вокруг оси, которая образована штифтами (не показаны), скользящими вдоль криволинейных пазов (не показаны) второй бранши (420) при перемещении упора (424) ко второй бранше (420). В таких вариантах ось поворота поступательно перемещается вдоль траектории, образованной пазами (не показаны), при одновременном повороте упора (424) вокруг этой оси. В дополнение или в качестве альтернативы ось поворота может сначала скользить вдоль пазов (не показаны), а затем упор (424) поворачивается вокруг оси вращения, после того как ось вращения переместилась на некоторое расстояние вдоль пазов (не показаны). Альтернативно некоторые варианты могут обеспечивать поворотное перемещение упора (424) вокруг оси, которая остается неподвижной и не перемещается поступательно внутри паза или канала и т. д.
Как лучше всего показано на ФИГ. 11-13, вторая бранша (420) настоящего примера образует канал (426), который выполнен с возможностью приема кассеты (418) со скобами. Кассету (418) со скобами можно ввести в канал (426), концевой эффектор (412) может быть приведен в действие, а затем кассету (418) со скобами можно извлечь и заменить на другую кассету (418) со скобами. Таким образом вторая бранша (420) высвобождаемо удерживает кассету (418) со скобами в совмещении с упором (424) для приведения в действие концевого эффектора (412). В некоторых альтернативных версиях компоненты кассеты (418) со скобами полностью интегрированы во вторую браншу (420) таким образом, что концевой эффектор (412) можно использовать только один раз. Другие приемлемые формы этой второй бранши (420) будут очевидны обычным специалистам в данной области в свете идей, представленных в настоящем документе. В настоящем примере вторая и первая бранши (420, 422) проходят к дистальному концу (432), который дополнительно образован кассетой (418) со скобами.
Кассета (418) со скобами настоящего примера имеет корпус (434) кассеты и лоток (436) (см. ФИГ. 36), закрепленный на нижней стороне корпуса (434) кассеты. Верхняя сторона корпуса (434) кассеты представляет собой платформу (438), к которой может прижиматься ткань, когда упор (424) находится в закрытом положении. В настоящем примере нижняя раздавливающая поверхность (416) расположена вдоль кассеты (418) со скобами. Однако следует понимать, что нижняя раздавливающая поверхность (416), а также взаимодействующая с ней верхняя раздавливающая поверхность (414) могут быть альтернативно расположены вдоль концевого эффектора (412) для рассечения ткани при помощи сжатия.
Корпус (434) кассеты дополнительно образует удлиненный канал (439), проходящий через вторую браншу (420) и линейно вдоль центральной линии (440) концевого эффектора (412). Другой удлиненный канал (441), образованный упором (424), проходит через первую браншу (422) и линейно вдоль центральной линии (440), также по причинам, более подробно описанным ниже. Множество углублений (442) для скоб соблюдают заданную схему вдоль платформы (438) на противоположных сторонах центральной линии (440). Более конкретно, кассета (418) со скобами включает в себя два продольно проходящих ряда углублений (442) для скоб с одной стороны центральной линии (440); и второй набор двух продольно проходящих рядов углублений (442) для скоб с другой стороны центральной линии (440). Однако в некоторых других вариантах кассета (418) со скобами может содержать три, одно или некоторое другое число углублений (442) для скоб с каждой стороны центральной линии (440).
Одна из множества скоб (444) расположена в соответствующих углублениях (442) для скоб. Смежные ряды углублений (442) для скоб выполнены с возможностью перекрывания в направлении, поперечном центральной линии (440) для установки множества скоб (444) внутри ткани и для блокировки отверстий между ними для улучшенного лигирования. Другими словами, в настоящем примере между смежными углублениями (442) для скоб поддерживается постоянный зазор (G1) для согласованного перекрывания. В настоящем документе термин «перекрывание» предназначен для включения одного элемента, перекрывающегося другим по меньшей мере в одном направлении. Таким образом, элемент может быть смещен от другого элемента и по-прежнему перекрываться с ним, как описано в настоящем документе, в том случае, если эти элементы перекрываются по меньшей мере в одной плоскости, такой как поперечная плоскость, включая поперечное направление. В свете идей, представленных в настоящем документе, обычным специалистам в данной области будут очевидны другие приемлемые формы этой кассеты (418) со скобами.
Что касается ФИГ. 11-13, упор (424) по настоящему примеру имеет множество формирующих скобу углублений (446). Каждое формирующее скобу углубление (446) расположено таким образом, что оно лежит над соответствующим углублением (442) для скобы кассеты (418) со скобами, когда упор (424) находится в закрытом положении. Формирующие скобу углубления (446) выполнены с возможностью деформации каждой ножки (448) скоб (444), когда скобы (444) подаются через ткань и в упор (424). В частности, формирующие скобу углубления (446) выполнены с возможностью сгиба ножек (448) скоб (444) для закрепления сформированных скоб (444) в ткани. Другие приемлемые формы этого упора (424) будут очевидны обычным специалистам в данной области в свете идей, представленных в настоящем документе.
Как лучше всего видно на ФИГ. 13, кассета (418) со скобами включает в себя выталкиватели (452) скоб, расположенные в углублениях (442) для скоб, под соответствующей скобой (444) и над лотком (436) (см. ФИГ. 36). Как будет более подробно описано ниже, выталкиватели (452) скоб выполнены с возможностью поступательного перемещения вверх в углубления (442) для скоб, чтобы таким образом подавать скобы (444) вверх через углубления (442) для скоб и во взаимодействие с упором (424). Выталкиватели (452) скоб подаются вверх клиновидными салазками (456), которые захватываются между корпусом кассеты (434) и лотком (436) (см. ФИГ. 36) и которые продольно перемещаются поступательно через корпус (434) кассеты вдоль пазов для (457) кулачка. Клиновидные салазки (456) включают в себя кулачковую наклонную поверхность (258), имеющую переднюю кулачковую поверхность (460), промежуточную кулачковую поверхность (462) и заднюю кулачковую поверхность (464). Только в качестве примера, передняя кулачковая поверхность (460) может находиться под углом приблизительно 45° относительно горизонтальной плоскости; а промежуточная кулачковая поверхность (462) может находиться под углом приблизительно 22° относительно горизонтальной плоскости. Альтернативно можно применять любые другие подходящие углы. Кулачковые наклонные поверхности (458), как правило, выполнены с возможностью взаимодействия с выталкивателями (452) скоб и, таким образом, подачи выталкивателей (452) скоб вверх по мере перемещения клиновидных салазок (456) в продольном направлении через кассету (418) со скобами из проксимального положения салазок в дистальное положение салазок. Например, когда клиновидные салазки (456) находятся в проксимальном положении салазок, выталкиватели (452) скоб находятся в нижних положениях, а скобы (444) расположены в углублениях (442) для скоб. По мере того как клиновидные салазки (456) приводятся в движение в дистальном положении салазок за счет поступательного перемещения скальпельного элемента (419) клиновидные салазки (456) приводят в движение выталкиватели (452) скоб вверх, таким образом подавая скобы (444) из углублений (442) для скоб в формирующие скобу углубления (446). Таким образом, выталкиватели (452) скоб поступательно перемещаются вдоль соответствующих вертикальных плоскостей, по мере того как клиновидные салазки (456) поступательно перемещаются вдоль горизонтальной плоскости.
В настоящем примере скальпельный элемент (419) выполнен с возможностью поступательного перемещения через концевой эффектор (412). Как лучше всего показано на ФИГ. 13, скальпельный элемент (419) закреплен на дистальном конце пусковой штанги (82), которая проходит через участок узла ствола (30). Скальпельный элемент (80) расположен в каналах (439, 441) кассеты (418) со скобами и упора (424) соответственно. Скальпельный элемент (419) включает в себя расположенный дистально режущий край (468), который выполнен с возможностью рассечения ткани, сжатой между упором (424) и платформой (438) кассеты (418) со скобами, по мере того как скальпельный элемент (419) поступательно перемещается в дистальном направлении через концевой эффектор (412). Как отмечено выше, скальпельный элемент (419) также приводит в движение клиновидные салазки (456) в дистальном направлении по мере того как скальпельный элемент (419) поступательно перемещается в дистальном направлении через концевой эффектор (412), таким образом подавая скобы (444) через ткань и к упору (424) для формирования.
1. Пример укороченного дистального конца кассеты со скобами
Как показано на ФИГ. 14 и 15, клиновидные салазки (456) скользят в дистальном направлении до тех пор, пока их поступательное перемещение вдоль центральной линии (440) не будет заблокировано дистальным концом (432) кассеты (418) со скобами. Таким образом, клиновидные салазки (456) эффективно размещаются под концевыми выталкивателями (452) скоб, которые в сочетании с лотком (436) образуют пространство (506) для хранения клиновидных салазок (456) между ними. Другими словами, дистальный конец (432) препятствует дистальному перемещению клиновидных салазок (456) таким образом, что большая часть клиновидных салазок (456) не может скользить в дистальном направлении за пределы концевых выталкивателей (452) скоб. Кроме того, дистальная часть кулачковой наклонной поверхности (458) клиновидных салазок (456) размещена внутри пары нижних отверстий (508) дистального конца (432), который дополнительно образует пространство (506) для хранения таким образом, что только малая дистальная часть клиновидных салазок (456) скользит в дистальном направлении за выталкиватели (452) скоб, как показано на ФИГ. 14 и ФИГ. 15. Более того, кулачковые поверхности (460, 462, 464) не полностью пересекают длину спинки самой дистальной скобы (444).
Таким образом, узел тройного выталкивателя (492), клиновидные салазки (456) и дистальный конец (432) выполнены с возможностью снижения удлинения дистального конца (432) концевого эффектора (412) для улучшения доступа к ткани в теле пациентов. Во-первых, дистальный выталкиватель (452) скоб консольно выступает дистально за пределы кулачка (494) выталкивателя для увеличения самого дистального положения скобы (444), обеспечивая при этом дополнительное пространство (506) для хранения, определенное ниже. Во-вторых, клиновидные салазки (456) содержат множество передних и промежуточных кулачковых поверхностей (460, 462), которые приводят к укорочению длины кулачковой наклонной поверхности (458). В-третьих, нижние отверстия (508) в дистальном конце (432) обеспечивают окончательное перемещение вдоль центральной (440) линии без дальнейшего дистального удлинения дистального конца (432). Таким образом, узел тройного выталкивателя (492), клиновидные салазки (456) и дистальный конец (432) выполнены с возможностью частичного уменьшения перемещения клиновидных салазок (456) и снижения уменьшения удлинения дистального конца (432) концевого эффектора (412) для улучшения доступа. Кроме того, очень близкое продольное расположение самых дистальных углублений (446) для скоб к дистальному концу (432) сведет к минимуму случаи разрыва ткани раздавливающими поверхностями (414, 416) в областях, которые находятся дистальнее самой дистальной скобы (444).
2. Пример способа резекции ткани
На ФИГ. 16A-16E показан один пример использования концевого эффектора (412) для резекции ткани, такой как ткань паренхимы печени (310) и для лигирования сосуда или канала (316) в ней. Как отмечалось выше, сосуд или канал (316) может содержать печеночную вену или печеночную артерию. Следует также понимать, что способ может дополнительно включать использование концевого эффектора (412) для лигирования других сосудов, таких как воротная вена и внепеченочные сосуды и т. д.
Как показано на ФИГ. 16B, оператор позиционирует концевой эффектор (412) таким образом, что ткань (310), включая сосуд или канал (316), расположена между второй и первой браншами (420, 422). Затем оператор сжимает ткань (310) между верхней и нижней раздавливающими поверхностями (414, 416) первой и второй бранши (420, 422), соответственно, для подачи заданного давления раздавливания на ткань (310). Только в качестве примера, бранши (420, 422) могут приводиться в действие таким образом путем поворота спускового (24) механизма к пистолетной рукоятке (22). Следует понимать, что бранши (420, 422) необязательно должны приводиться в действие в полностью закрытую конфигурацию. В некоторых случаях оператор может полагаться на тактильную обратную связь с помощью спускового (24) механизма и пистолетной рукоятки (22) для определения того, достиг ли оператор желаемого зазора между браншами (420, 422) для подходящего раздавливания ткани (310) без нежелательного повреждения сосуда или протока (316). В дополнение или в качестве альтернативы оператор может полагаться на визуальную обратную связь.
В любом случае давление раздавливания, приложенное браншами (420, 422), эффективно рассекает ткань (310), а затем оператор удаляет концевой эффектор (412) из ткани (310) для просмотра того, присутствуют ли сосуды или протоки. Как показано на ФИГ. 16C, сосуд или проток (316) остаются неповрежденным и обнаженными, проходя между рассеченными частями ткани (310).
В некоторых случаях оператор может оставить сосуд или проток (316) в нетронутым. Тем не менее в настоящем примере оператор лигирует сосуд или проток (316) для завершения резекции рассеченной части ткани (310), как показано на ФИГ. 16D. Лигирование включает размещение по меньшей мере некоторых перекрывающихся скоб (444) внутри сосуда или протока (316), как более подробно описано выше. Таким образом, следует понимать, что один и тот же концевой эффектор (412) может использоваться для раздавливания (и, следовательно, рассечения) ткани (310) печени, а также лигирования сосуда или протока (316) в ткани (310). В настоящем примере сосуд или проток (316) сшивают и рассекают по существу одновременно при помощи концевого эффектора (412), в результате чего образуется конфигурация, показанная на ФИГ. 16E. Как показано, рассеченный конец (318) сосуда или протока (316) сшивается скобами (444). Таким образом, оператор завершает резекцию правой части ткани (310) и соответствующей части сосуда или протока (316).
Как описано выше, оператор удаляет концевой эффектор (412) для осмотра сосуда (316), как показано на ФИГ. 16C. Альтернативно оператор может применить предварительно заданное давление раздавливания (или определено на основании тактильной и/или визуальной обратной связи, как указано выше), как показано на ФИГ. 16B и сразу после этого рассечь и лигировать оставшуюся в нем ткань, такую как сосуд или проток (316). Таким образом, нет необходимости просматривать такую ткань, но оператор может посчитать такой осмотр желательным в ходе одной или более процедур резекции печени. Следует понимать, что вышеописанная резекция является лишь иллюстративной и не ограничивается тканью печени. Альтернативно резекция ткани при помощи концевого эффектора (412) может выполняться на других тканях в теле пациента по желанию пользователя.
III. Примеры комбинаций
Представленные ниже примеры относятся к различным неисчерпывающим способам, с помощью которых можно комбинировать или применять идеи настоящего документа. Следует понимать, что представленные ниже примеры не предназначены для ограничения объема каких-либо пунктов формулы изобретения, которые могут быть представлены в любой момент времени в данной заявке или в последующих документах по данной заявке. Отказ от пункта формулы не предполагается. Представленные ниже примеры предложены лишь в иллюстративных целях. Предполагается, что различные идеи настоящего документа можно компоновать и применять множеством других способов. Кроме того, предполагается, что некоторые варианты могут не включать определенные элементы, упомянутые в приведенных ниже примерах. Следовательно, ни один из упомянутых ниже аспектов или элементов не следует считать критическим, если иное явным образом не указано впоследствии авторами изобретения или правопреемником в интересах авторов изобретения. Если в данной заявке или в последующих документах по данной заявке представлены какие-либо пункты формулы изобретения, которые содержат дополнительные элементы помимо упомянутых ниже, эти дополнительные элементы не будут считаться добавленными по какой-либо причине, относящейся к патентоспособности.
Пример 1
Хирургический инструмент для обработки ткани пациента, содержащий: (a) узел ствола; (b) концевой эффектор, проходящий от узла ствола вдоль центральной линии бранши, при этом концевой эффектор содержит: (i) первую браншу, имеющую упор, выполненный с возможностью формирования множества скоб, прижатых к упору, и (ii) вторую браншу, причем первая и вторая бранши выполнены с возможностью перехода между открытой конфигурацией и закрытой конфигурацией; и (c) кассету со скобами, размещенную внутри второй бранши, причем кассета со скобами содержит: (i) платформу, обращенную к упору, причем платформа образует множество отверстий для скоб, причем множество скоб расположены соответственно внутри множества отверстий для скоб, (ii) первый узел концевого выталкивателя, расположенный смежно с дистальным концом кассеты со скобами, причем первый узел концевого выталкивателя выполнен с возможностью приема первой концевой части множества скоб, при этом первый узел концевого выталкивателя по меньшей мере частично образует под скобой пространство для хранения внутри второй бранши, и (iii) клиновидные салазки, выполненные с возможностью скольжения вблизи платформы из проксимального положения салазок в дистальное положение салазок и зацепления первого узла концевого выталкивателя, и принудительного перемещения концевой части множества скоб к упору для формирования в ткани, причем по меньшей мере большая часть клиновидных салазок выполнена с возможностью размещения в пространстве для хранения, без скольжения в дистальном направлении за пределы первого узла концевого выталкивателя, когда клиновидные салазки находятся в дистальном положении салазок.
Пример 2
Хирургический инструмент по примеру 1, в котором клиновидные салазки дополнительно содержат первую кулачковую наклонную поверхность, причем первая кулачковая наклонная поверхность выполнена с возможностью зацепления с первым узлом концевого выталкивателя и принудительного перемещения концевой части множества скоб к упору для формирования в ткани, причем большая часть первой кулачковой наклонной поверхности выполнена с возможностью размещения в пространстве для хранения, когда клиновидные салазки находятся в дистальном положении салазок.
Пример 3
Хирургический инструмент по любому одному или более из примеров 1-2, в котором клиновидные салазки имеют дистальный носовой участок, причем вторая бранша имеет стенку блокатора, расположенную в ней дистально вдоль центральной линии, причем стенка блокатора выполнена с возможностью приема примыкающих к ней клиновидных салазок и препятствования перемещению клиновидных салазок в дистальном направлении за пределы дистального положения салазок.
Пример 4
Хирургический инструмент по примеру 3, в котором стенка блокатора образует проходное отверстие, выполненное с возможностью приема дистального носового участка клиновидных салазок в дистальном положении салазок.
Пример 5
Хирургический инструмент по любому одному или более из примеров 1-4, в котором клиновидные салазки имеют первую кулачковую наклонную поверхность, выполненную с возможностью зацепления с первым узлом концевого выталкивателя, причем первая кулачковая наклонная поверхность дополнительно содержит: (A) переднюю кулачковую поверхность, образующую крутой наклон, и (B) промежуточную кулачковую поверхность, образующую пологий наклон, причем пологий наклон расположен под меньшим углом, чем крутой наклон, относительно платформы, причем кулачок выталкивателя выполнен с возможностью зацепления передней кулачковой поверхностью для подъема узла выталкивателя вверх к первой бранше на относительно короткое расстояние для уменьшения удлинения клиновидных салазок, и при этом кулачок выталкивателя дополнительно выполнен с возможностью зацепления промежуточной кулачковой поверхностью для дополнительного подъема узла выталкивателя вверх к первой бранше на относительно длинное расстояние для обеспечения достаточной силы для прижатия первой и второй скобы к упору для применения в ткани.
Пример 6
Хирургический инструмент по любому одному или более из примеров 1-5, в котором первый узел концевого выталкивателя имеет первый концевой дистальный выталкиватель, первый концевой промежуточный выталкиватель и первый концевой проксимальный выталкиватель; причем первый концевой дистальный выталкиватель, первый концевой промежуточный выталкиватель и первый концевой проксимальный выталкиватель функционально соединены таким образом, что первый концевой дистальный выталкиватель консольно закреплен дистально относительно первого концевого промежуточного выталкивателя и первого концевого промежуточного выталкивателя для максимального удлинения пространства для хранения под собой, причем первый концевой дистальный выталкиватель расположен смежно с дистальным концом кассеты со скобами.
Пример 7
Хирургический инструмент по примеру 6, в котором первый концевой дистальный выталкиватель, первый концевой промежуточный выталкиватель и первый концевой проксимальный выталкиватель функционально соединены таким образом, что первый концевой дистальный выталкиватель и первый концевой проксимальный выталкиватель выровнены в продольном направлении, а первый концевой промежуточный выталкиватель смещен в поперечном направлении от каждого из первого концевого дистального выталкивателя и первого концевого проксимального выталкивателя, причем первый концевой дистальный выталкиватель, первый концевой промежуточный выталкиватель и первый концевой проксимальный выталкиватель соответственно принимают первую концевую часть множества скоб.
Пример 8
Хирургический инструмент по любому одному или более из примеров 1-7, в котором кассета со скобами дополнительно содержит второй узел концевого выталкивателя, расположенный смежно с дистальным концом и выполненный с возможностью приема второй концевой части множества скоб, причем второй узел концевого выталкивателя дополнительно образует под собой пространство для хранения внутри второй бранши.
Пример 9
Хирургический инструмент по примеру 8, в котором второй узел концевого выталкивателя содержит второй концевой дистальный выталкиватель, второй концевой промежуточный выталкиватель и второй концевой проксимальный выталкиватель; причем второй концевой дистальный выталкиватель, второй концевой промежуточный выталкиватель и второй концевой проксимальный выталкиватель функционально соединены таким образом, что второй концевой дистальный выталкиватель консольно закреплен дистально относительно второго концевого промежуточного выталкивателя и второго концевого промежуточного выталкивателя для максимального удлинения пространства для хранения под собой, причем второй концевой дистальный выталкиватель расположен смежно с дистальным концом.
Пример 10
Хирургический инструмент по примеру 9, в котором первый и второй концевые дистальные узлы выталкивателя расположены на противоположных сторонах центральной линии.
Пример 11
Хирургический инструмент по примеру 10, в котором первый и второй концевые дистальные узлы выталкивателя расположены таким образом, что второй концевой дистальный узел выталкивателя является зеркальным отражением первого концевого дистального узла выталкивателя относительно центральной линии.
Пример 12
Хирургический инструмент по любому одному или более из примеров 10-11, в котором клиновидные салазки имеют первую кулачковую наклонную поверхность и вторую кулачковую наклонную поверхность, причем первая кулачковая наклонная поверхность выполнена с возможностью зацепления с первым концевым дистальным узлом выталкивателя, причем вторая кулачковая наклонная поверхность выполнена с возможностью зацепления со вторым концевым дистальным узлом выталкивателя.
Пример 13
Хирургический инструмент по примеру 12, в котором первая кулачковая наклонная поверхность имеет первый дистальный носовой участок, причем вторая кулачковая наклонная поверхность имеет второй дистальный носовой участок, причем вторая бранша имеет вторую браншу, имеющую стенку блокатора, расположенную в ней дистально вдоль центральной линии, причем стенка блокатора выполнена с возможностью приема примыкающих к ней клиновидных салазок и препятствования перемещению клиновидных салазок в дистальном направлении за пределы дистального положения салазок, причем стенка блокатора образует по меньшей мере одно проходное отверстие, выполненное с возможностью приема первого и второго дистальных носовых участков клиновидных салазок в дистальном положении салазок.
Пример 14
Хирургический инструмент по любому одному или более из примеров 1-13, в котором первая бранша имеет первый удлиненный канал, проходящий через нее, и первое множество меток, причем вторая бранша имеет второй удлиненный канал, проходящий через нее, и второе множество меток, причем инструмент дополнительно содержит скальпельный элемент, размещенный в первом и втором каналах, причем скальпельный элемент выполнен с возможностью скольжения в дистальном направлении по первому и второму каналам и зацепления с клиновидными салазками для формирования скоб, и при этом скальпельный элемент содержит первый индикатор в первом канале и второй индикатор во втором канале, причем первый и второй индикаторы в сочетании с первым и вторым множеством меток соответственно выполнены с возможностью указывать оператору на применение скоб.
IV. Прочее
Следует понимать, что любую одну или более из идей, выражений, вариантов осуществления, примеров и т. д., описанных в настоящем документе, можно комбинировать с одной или более из других идей, выражений, вариантов осуществления, примеров и т. д., описанных в настоящем документе. Поэтому описанные выше идеи, выражения, варианты осуществления, примеры и т. д. не следует рассматривать отдельно друг от друга. В свете идей, представленных в настоящем документе, обычным специалистам в данной области будут очевидны различные приемлемые способы, которыми можно комбинировать идеи настоящего документа. Предполагается, что такие модификации и вариации включены в объем формулы изобретения.
Следует учитывать, что любой патент, публикация или другой материал описания, полностью или частично, который указан как включенный в настоящий документ путем ссылки, включен в него только в той степени, в которой включенный материал не противоречит существующим определениям, положениям или другим материалам описания, изложенным в настоящем описании. Таким образом, описание, в прямой форме изложенное в настоящем документе, в той мере, в которой это необходимо, превалирует над любым противоречащим материалом, включенным в настоящий документ путем ссылки. Любой материал или его часть, указанный как включенный в настоящий документ путем ссылки, но противоречащий существующим определениям, положениям или другим материалам описания, изложенным в настоящем документе, будет включен только в той мере, в которой между включенным материалом и существующим материалом описания не возникает противоречий.
Варианты описанных выше устройств могут применяться в традиционных видах медицинского лечения и процедурах, выполняемых медицинским специалистом, а также в роботизированных видах медицинского лечения и процедурах. Исключительно для примера, различные идеи, представленные в настоящем документе, могут быть легко использованы в роботизированной хирургической системе, такой как система DAVINCI™, разработанная компанией Intuitive Surgical, Inc., г. Саннивейл, штат Калифорния, США. Аналогичным образом, обычным специалистам в данной области будет понятно, что различные идеи, представленные в настоящем документе, можно легко комбинировать с различными идеями, представленными в любом из следующих документов: патенте США № 5,792,135, озаглавленном «Articulated Surgical Instrument For Performing Minimally Invasive Surgery With Enhanced Dexterity and Sensitivity», выпущенном 11 августа 1998 г., описание которого включено в настоящий документ путем ссылки; патенте США № 5,817,084, озаглавленном «Remote Center Positioning Device with Flexible Drive», выпущенном 6 октября 1998 г., описание которого включено в настоящий документ путем ссылки; патенте США № 5,878,193, озаглавленном «Automated Endoscope System for Optimal Positioning», выпущенном 2 марта 1999 г., описание которого включено в настоящий документ путем ссылки; патенте США № 6,231,565, озаглавленном «Robotic Arm DLUS for Performing Surgical Tasks», выпущенном 15 мая 2001 г., описание которого включено в настоящий документ путем ссылки; патенте США № 6,783,524, озаглавленном «Robotic Surgical Tool with Ultrasound Cauterizing and Cutting Instrument», выпущенном 31 августа 2004 г., описание которого включено в настоящий документ путем ссылки; патенте США № 6,364,888, озаглавленном «Alignment of Master and Slave in a Minimally Invasive Surgical Apparatus», выпущенном 2 апреля 2002 г., описание которого включено в настоящий документ путем ссылки; патенте США № 7,524,320, озаглавленном «Mechanical Actuator Interface System for Robotic Surgical Tools», выпущенном 28 апреля 2009 г., описание которого включено в настоящий документ путем ссылки; патенте США № 7,691,098, озаглавленном «Platform Link Wrist Mechanism», выпущенном 6 апреля 2010 г., описание которого включено в настоящий документ путем ссылки; патенте США № 7,806,891, озаглавленном «Repositioning and Reorientation of Master/Slave Relationship in Minimally Invasive Telesurgery», выпущенном 5 октября 2010 г., описание которого включено в настоящий документ путем ссылки; патентной публикации США № 2013/0012957, озаглавленной «Automated End Effector Component Reloading System for Use with a Robotic System», опубликованной 10 января 2013 г., описание которой включено в настоящий документ путем ссылки; патентной публикации США № 2012/0199630, озаглавленной «Robotically-Controlled Surgical Instrument with Force-Feedback Capabilities», опубликованной 9 августа 2012 г., описание которой включено в настоящий документ путем ссылки; патентной публикации США № 2012/0132450, озаглавленной «Shiftable Drive Interface for Robotically-Controlled Surgical Tool», опубликованной 31 мая 2012 г., описание которой включено в настоящий документ путем ссылки; патентной публикации США № 2012/0199633, озаглавленной «Surgical Stapling Instruments with Cam-Driven Staple Deployment Arrangements», выпущенной 9 августа 2012 г., описание которой включено в настоящий документ путем ссылки; патентной публикации США № 2012/0199631, озаглавленной «Robotically-Controlled Motorized Surgical End Effector System with Rotary Actuated Closure Systems Having Variable Actuation Speeds», опубликованной 9 августа 2012 г., описание которой включено в настоящий документ путем ссылки; патентной публикации США № 2012/0199632, озаглавленной «Robotically-Controlled Surgical Instrument with Selectively Articulatable End Effector», выпущенной 9 августа 2012 г., описание которой включено в настоящий документ путем ссылки; патентной публикации США № 2012/0203247, озаглавленной «Robotically-Controlled Surgical End Effector System», опубликованной 9 августа 2012 г., описание которой включено в настоящий документ путем ссылки; патентной публикации США № 2012/0211546, озаглавленной «Drive Interface for Operably Coupling a Manipulatable Surgical Tool to a Robot», опубликованной 23 августа 2012 г.; патентной публикации США № 2012/0138660, озаглавленной «Robotically-Controlled Cable-Based Surgical End Effectors», выпущенной 7 июня 2012 г., описание которой включено в настоящий документ путем ссылки; и/или патентной публикации США № 2012/0205421, озаглавленной «Robotically-Controlled Surgical End Effector System with Rotary Actuated Closure Systems», опубликованной 16 августа 2012 г., описание которой включено в настоящий документ путем ссылки.
Варианты описанных выше устройств могут быть выполнены с возможностью утилизации после однократного применения или они могут быть выполнены с возможностью многократного применения. Либо в одном, либо в обоих случаях после по меньшей мере одного применения они могут быть подготовлены для повторного применения. Подготовка для повторного применения может включать в себя любую комбинацию стадий разборки устройства, затем очистки или замены конкретных фрагментов и последующей повторной сборки. В частности, некоторые варианты устройства можно разобрать, и любое число конкретных фрагментов или деталей устройства можно избирательно заменить или удалить в любой комбинации. После очистки и/или замены конкретных частей некоторые варианты устройства можно повторно собрать для последующего применения либо в отделении, выполняющем восстановление, либо это может сделать сам пользователь непосредственно перед процедурой. Специалистам в данной области будет понятно, что при подготовке устройства для повторного применения можно использовать различные методики разборки, очистки/замены и повторной сборки. Применение таких методик, а также полученное восстановленное устройство входят в объем настоящей заявки.
Исключительно для примера, описанные в настоящем документе варианты можно стерилизовать до и/или после процедуры. В одной методике стерилизации устройство помещают в закрытый и герметичный контейнер, такой как пластиковый пакет или пакет из материала Тайвек (TYVEK). Впоследствии контейнер и устройство можно поместить в поле излучения, которое может проникать в контейнер, такого как гамма-излучение, рентгеновское излучение или высокоэнергетический поток электронов. Излучение может убивать бактерии на устройстве и в контейнере. Впоследствии стерилизованное устройство можно хранить в стерильном контейнере для дальнейшего применения. Устройство также можно стерилизовать с применением любой другой методики, известной в данной области, включая, без ограничений, бета- или гамма-излучение, этиленоксид или пар.
Обычный специалист в данной области может осуществлять различные показанные и описанные варианты осуществления настоящего изобретения, дополнительные адаптации способов и систем, описанных в настоящем документе, путем внесения соответствующих модификаций без отступления от объема настоящего изобретения. Были упомянуты некоторые из таких потенциальных модификаций, а другие будут очевидны специалистам в данной области. Например, описанные выше примеры, варианты осуществления, геометрические формы, материалы, размеры, соотношения, стадии и т. п. являются иллюстративными и не являются обязательными. Соответственно, объем настоящего изобретения следует рассматривать в свете представленной ниже формулы изобретения, и следует понимать, что он не ограничен подробной информацией о конструкции и эксплуатации, показанной и описанной в спецификации и на рисунках.
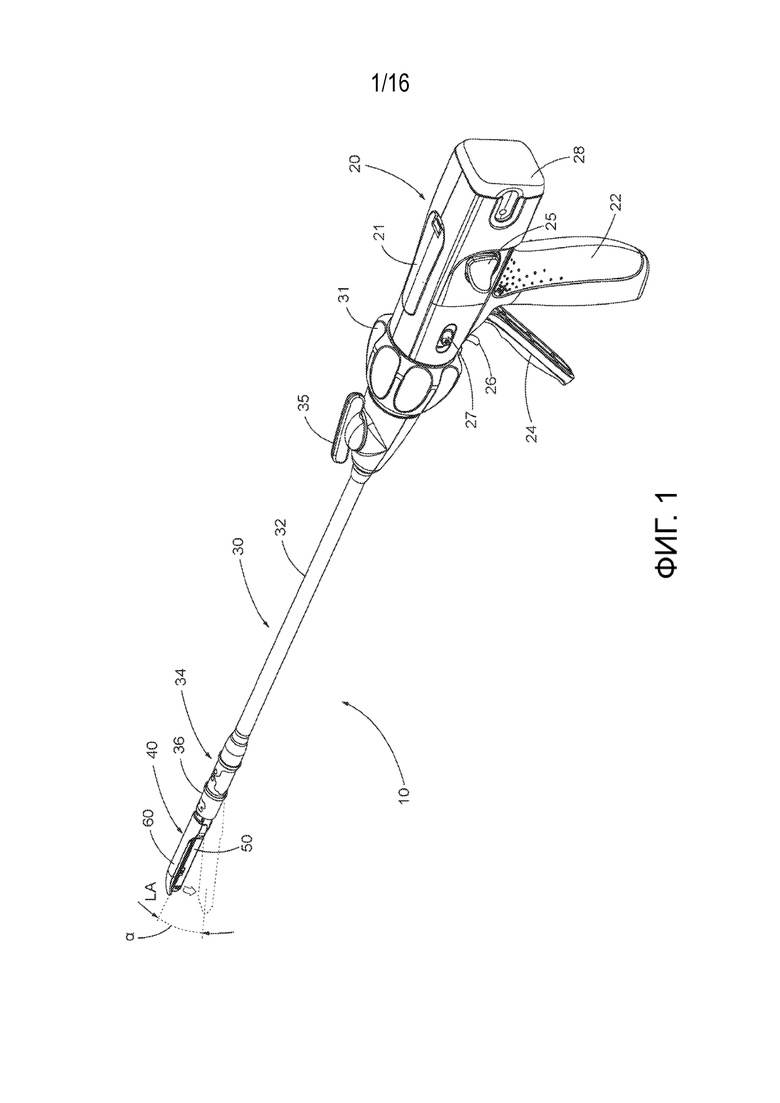
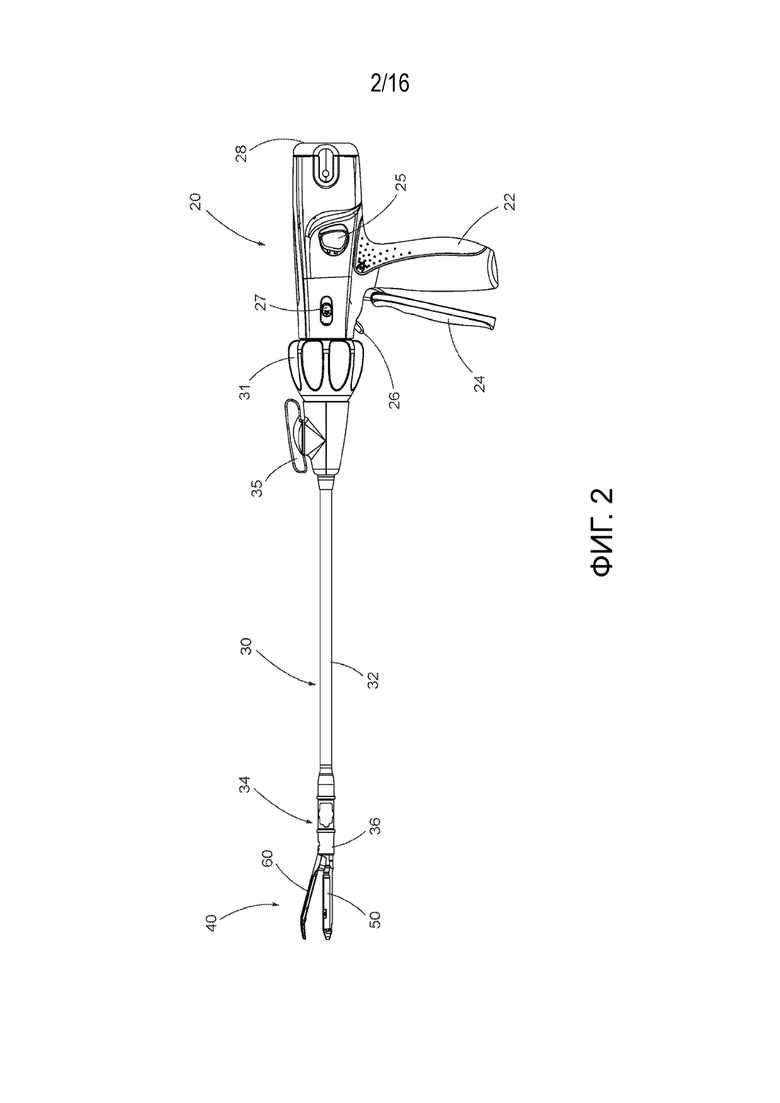
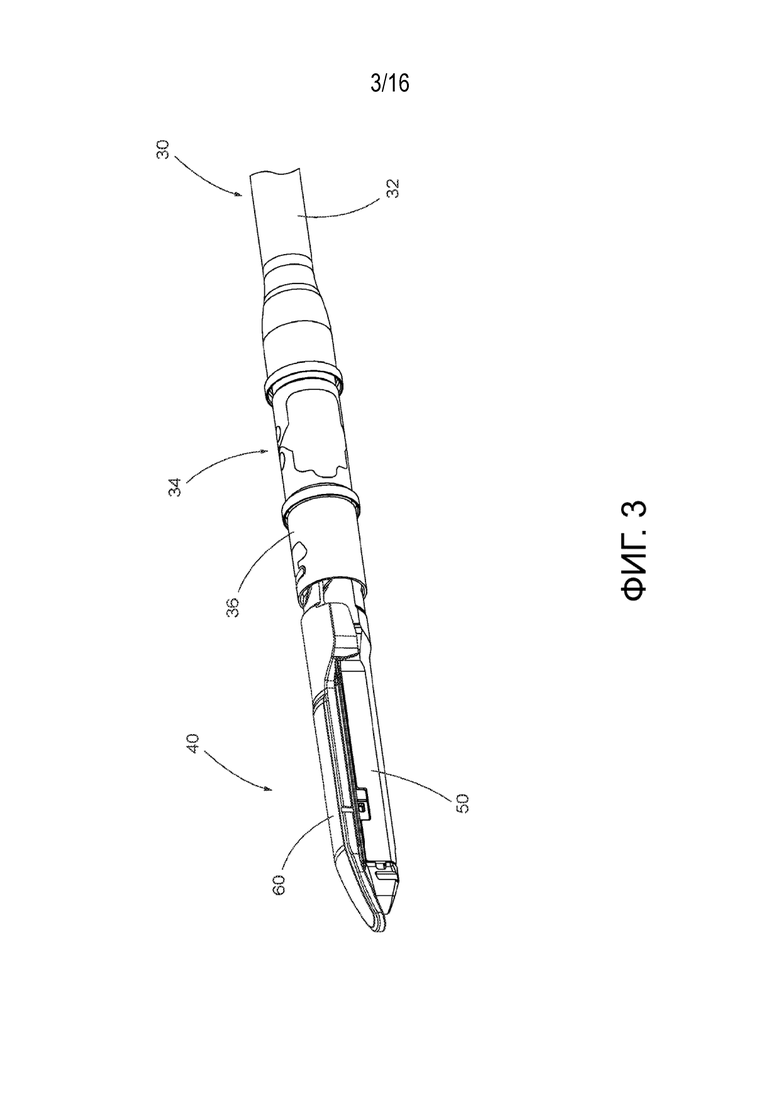
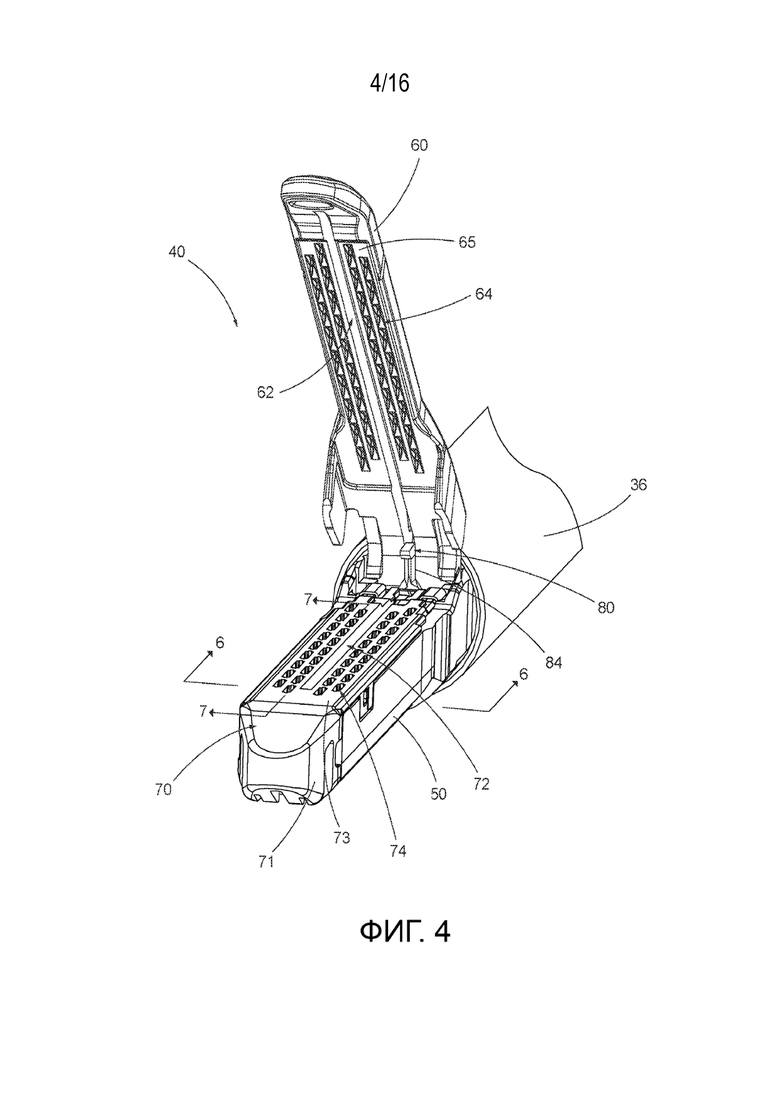
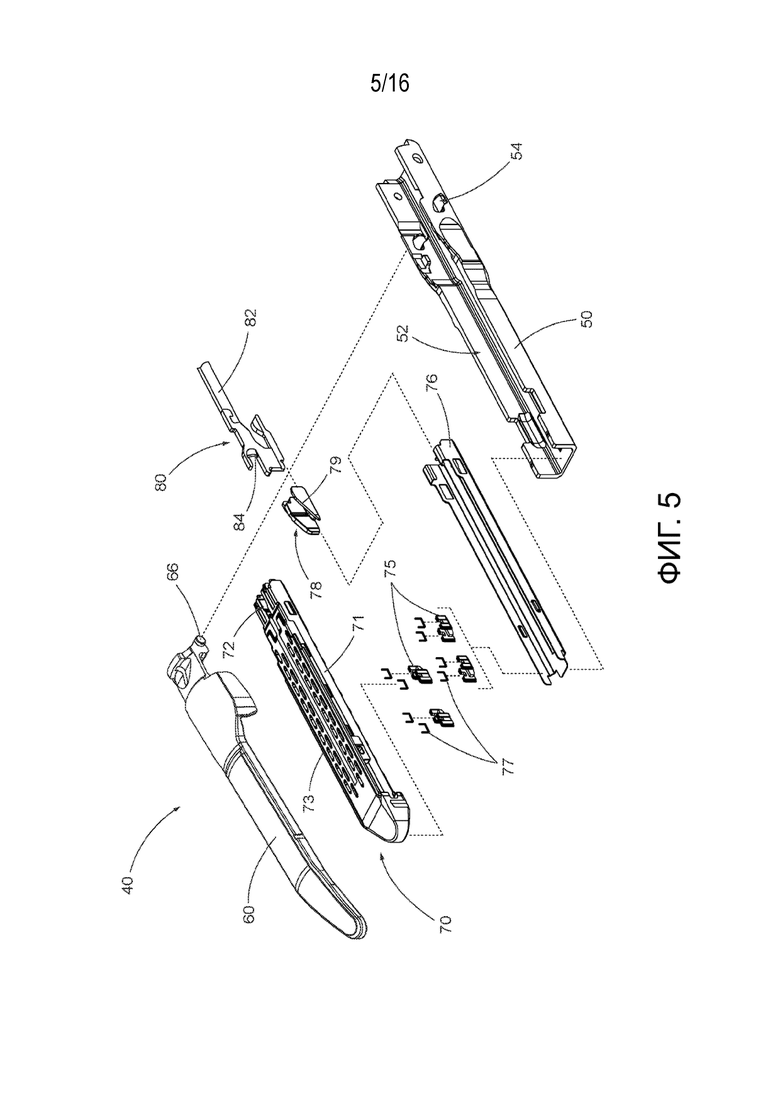
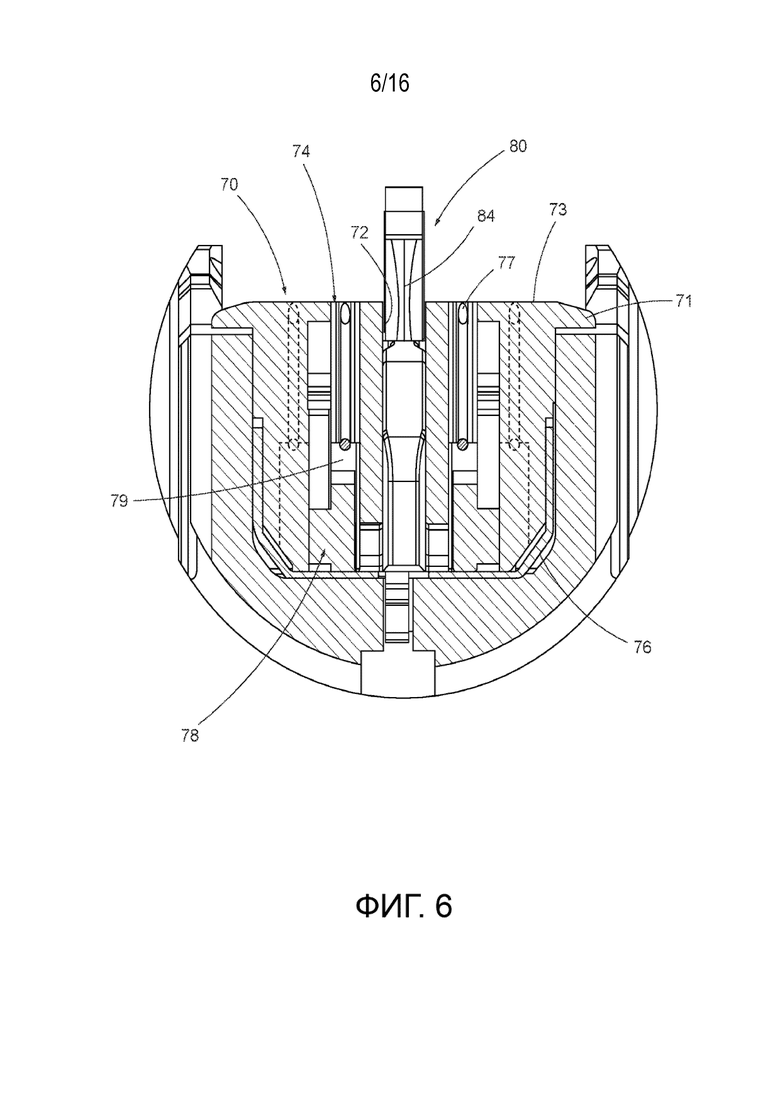
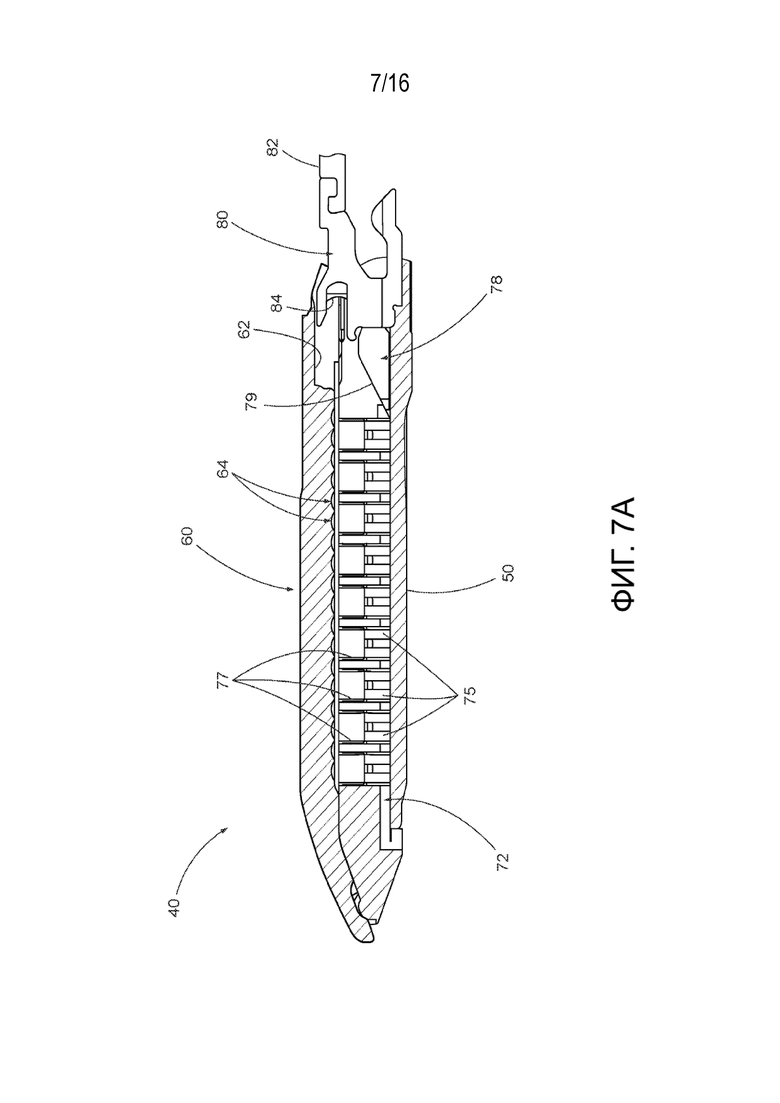
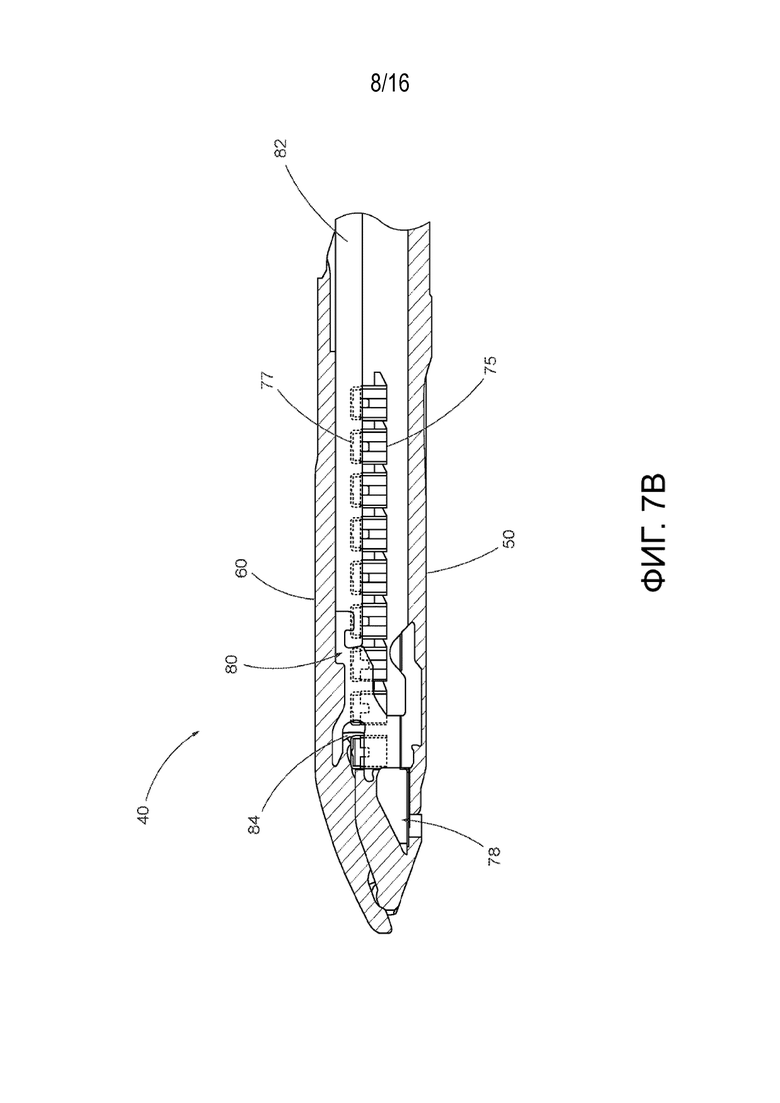
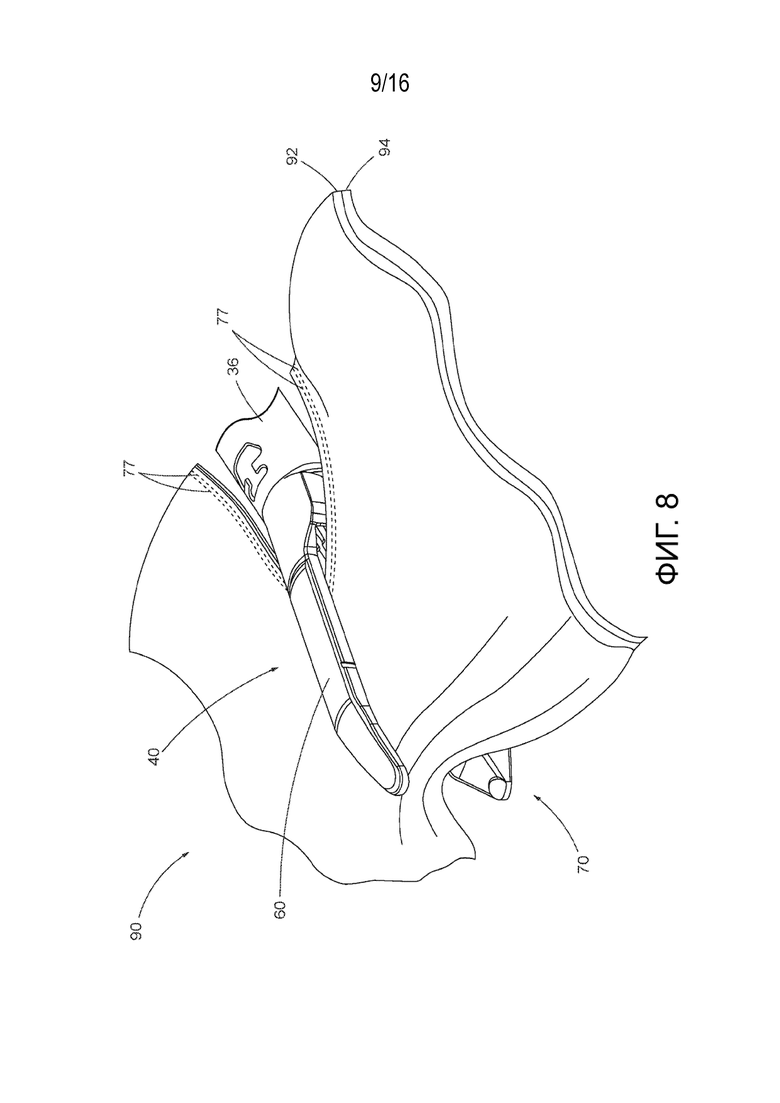
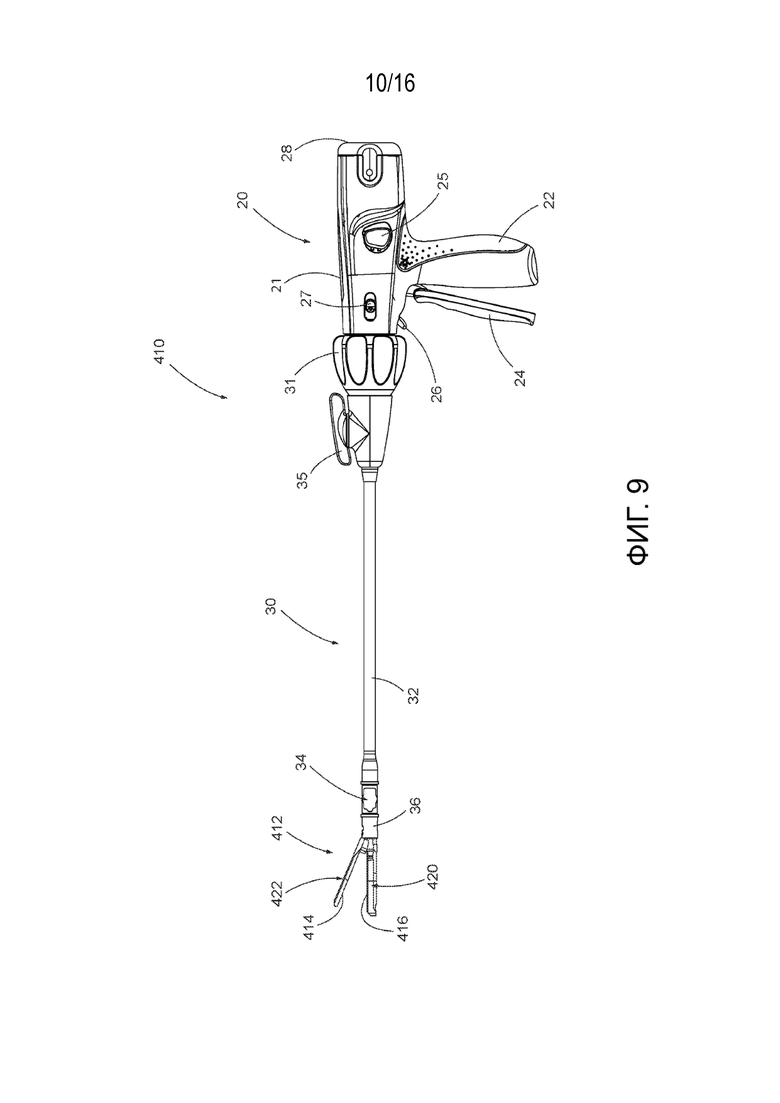
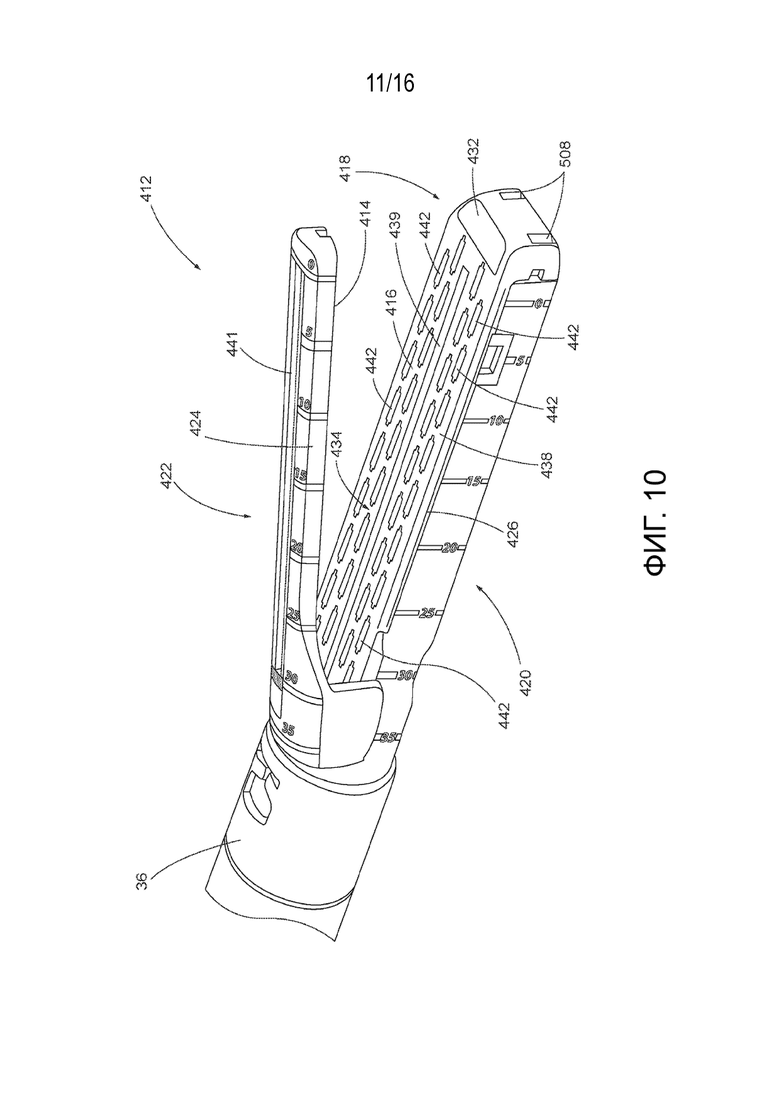
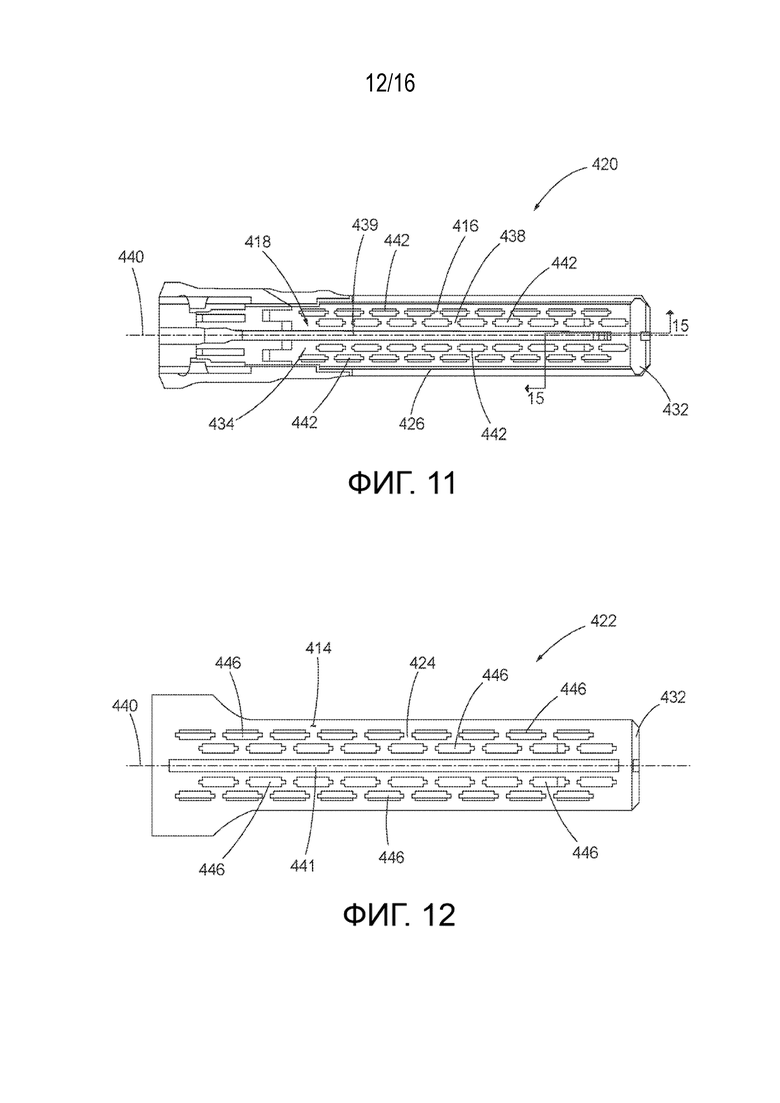
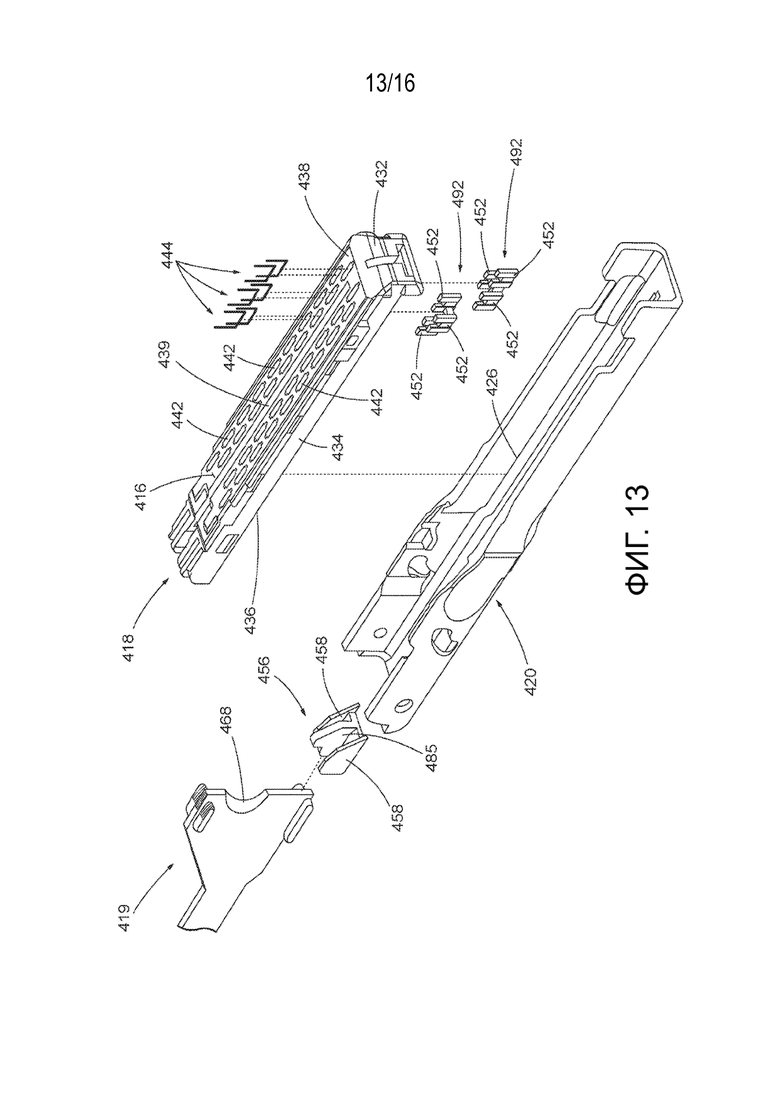
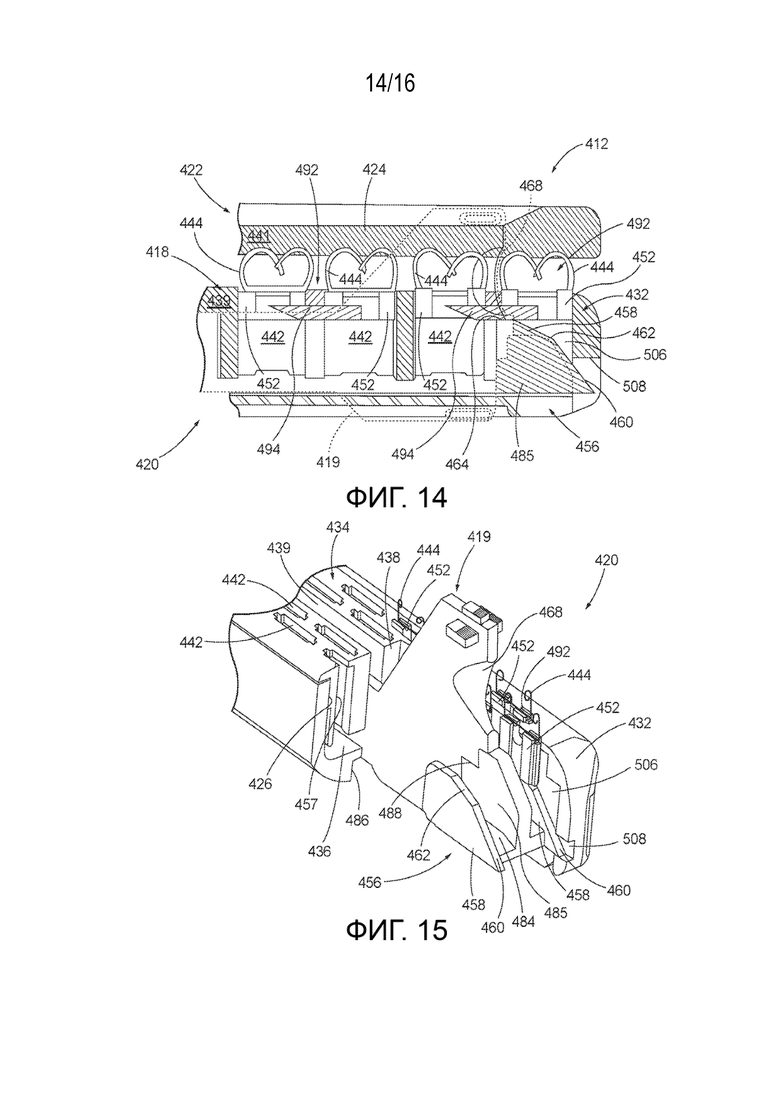
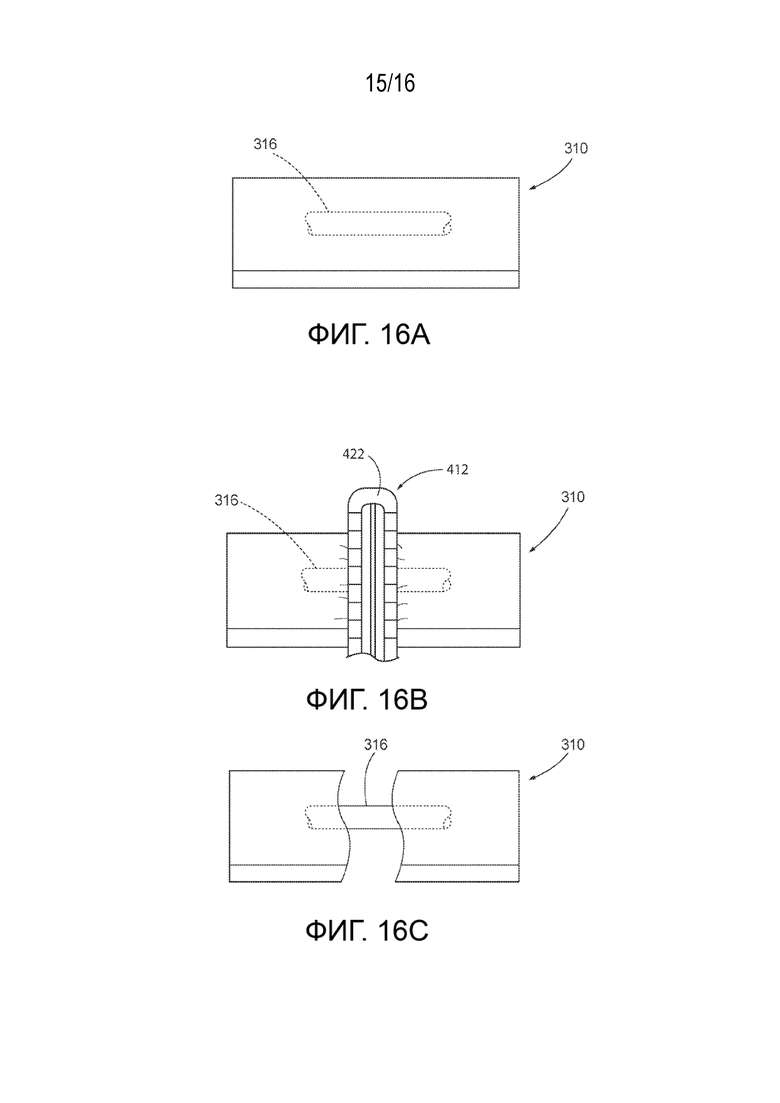
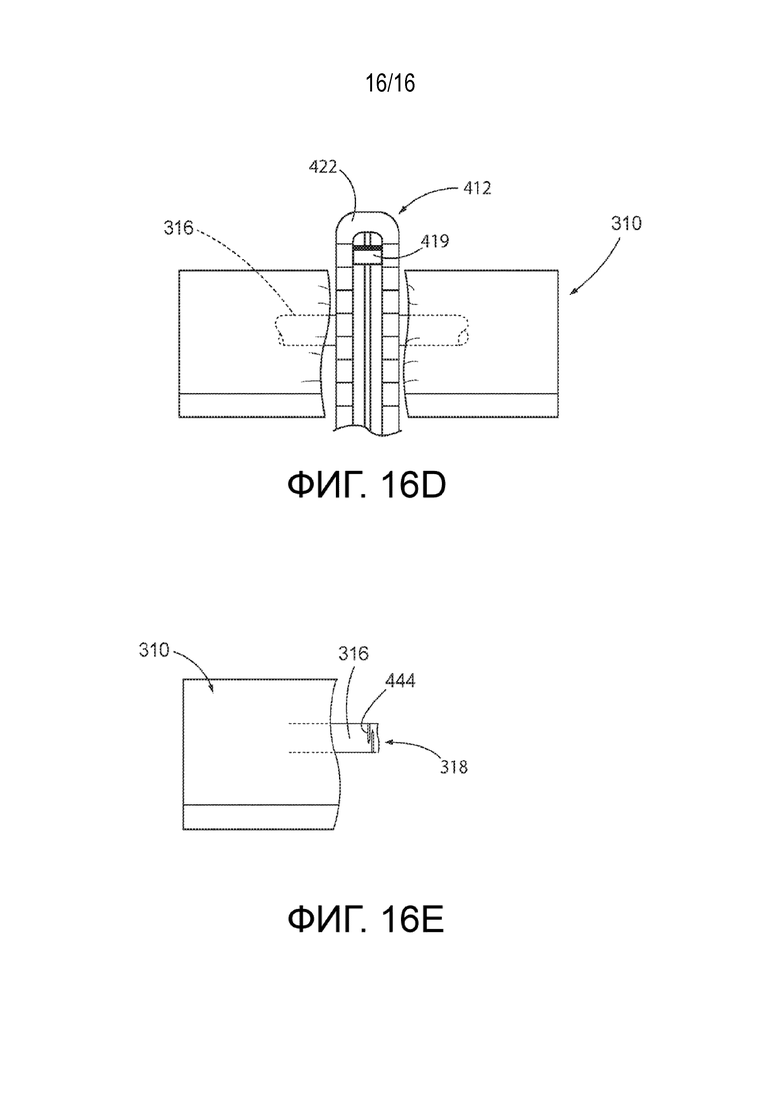
Изобретение относится к медицинской технике, а именно к хирургическому инструменту. Хирургический инструмент для обработки ткани пациента содержит узел ствола, концевой эффектор и кассету со скобами. Концевой эффектор проходит от узла ствола вдоль центральной линии бранши. Концевой эффектор содержит первую браншу и вторую браншу. Первая бранша имеет упор, выполненный с возможностью формирования скоб, прижатых к упору. Первая и вторая бранши выполнены с возможностью перехода между открытой конфигурацией и закрытой конфигурацией. Кассета со скобами размещена внутри второй бранши. Кассета со скобами содержит платформу, первый узел концевого выталкивателя и клиновидные салазки. Платформа обращена к упору. Платформа образует отверстия для скоб. Скобы расположены внутри отверстий для скоб. Первый узел концевого выталкивателя расположен смежно с дистальным концом кассеты со скобами. Первый узел концевого выталкивателя выполнен с возможностью приема первой концевой части скоб. Первый узел концевого выталкивателя по меньшей мере частично образует под собой пространство для хранения внутри второй бранши. Клиновидные салазки выполнены с возможностью скольжения вблизи платформы из проксимального положения салазок в дистальное положение салазок и зацепления первого узла концевого выталкивателя, и принудительного перемещения концевой части скоб к упору для формирования в ткани. По меньшей мере большая часть длины клиновидных салазок выполнена с возможностью размещения в пространстве для хранения, без скольжения в дистальном направлении за пределы первого узла концевого выталкивателя, когда клиновидные салазки находятся в дистальном положении салазок. Клиновидные салазки содержат первую кулачковую наклонную поверхность, выполненную с возможностью зацепления с первым узлом концевого выталкивателя. Первая кулачковая наклонная поверхность содержит переднюю кулачковую поверхность и промежуточную кулачковую поверхность. Передняя кулачковая поверхность образует первый угол наклона между нижней поверхностью и передней кулачковой поверхностью. Промежуточная кулачковая поверхность образует второй угол наклона между нижней поверхностью и промежуточной кулачковой поверхностью. Первый угол наклона передней кулачковой поверхности больше, чем второй угол наклона промежуточной кулачковой поверхности. Узел выталкивателя выполнен с возможностью зацепления передней кулачковой поверхностью для подъема узла выталкивателя вверх на первое верхнее расстояние к первой бранше на первое дистальное расстояние. Узел выталкивателя выполнен с возможностью зацепления промежуточной кулачковой поверхностью для дополнительного подъема узла выталкивателя вверх на второе верхнее расстояние к первой бранше на второе дистальное расстояние для обеспечения достаточной силы для прижатия концевой части скоб к упору для применения в ткани. Первое верхнее расстояние больше, чем второе верхнее расстояние. Использование изобретения позволяет обеспечить сшивание и рассечение ткани в теле пациента. 13 з.п. ф-лы, 16 ил.
1. Хирургический инструмент для обработки ткани пациента, содержащий:
(a) узел ствола;
(b) концевой эффектор, проходящий от узла ствола вдоль центральной линии бранши, при этом концевой эффектор содержит:
(i) первую браншу, имеющую упор, выполненный с возможностью формирования скоб, прижатых к упору, и
(ii) вторую браншу, причем первая и вторая бранши выполнены с возможностью перехода между открытой конфигурацией и закрытой конфигурацией; и
(c) кассету со скобами, размещенную внутри второй бранши, причем кассета со скобами содержит:
(i) платформу, обращенную к упору, причем платформа образует отверстия для скоб, причем скобы расположены соответственно внутри отверстий для скоб,
(ii) первый узел концевого выталкивателя, расположенный смежно с дистальным концом кассеты со скобами, причем первый узел концевого выталкивателя выполнен с возможностью приема первой концевой части скоб, при этом первый узел концевого выталкивателя по меньшей мере частично образует под собой пространство для хранения внутри второй бранши, и
(iii) клиновидные салазки, выполненные с возможностью скольжения вблизи платформы из проксимального положения салазок в дистальное положение салазок и зацепления первого узла концевого выталкивателя, и принудительного перемещения концевой части скоб к упору для формирования в ткани, причем по меньшей мере большая часть длины клиновидных салазок выполнена с возможностью размещения в пространстве для хранения, без скольжения в дистальном направлении за пределы первого узла концевого выталкивателя, когда клиновидные салазки находятся в дистальном положении салазок, причем клиновидные салазки содержат первую кулачковую наклонную поверхность, выполненную с возможностью зацепления с первым узлом концевого выталкивателя, причем первая кулачковая наклонная поверхность дополнительно содержит:
(A) переднюю кулачковую поверхность, образующую первый угол наклона между нижней поверхностью и передней кулачковой поверхностью, и
(B) промежуточную кулачковую поверхность, образующую второй угол наклона между нижней поверхностью и промежуточной кулачковой поверхностью, причем первый угол наклона передней кулачковой поверхности больше, чем второй угол наклона промежуточной кулачковой поверхности,
причем узел выталкивателя выполнен с возможностью зацепления передней кулачковой поверхностью для подъема узла выталкивателя вверх на первое верхнее расстояние к первой бранше на первое дистальное расстояние, и
при этом узел выталкивателя дополнительно выполнен с возможностью зацепления промежуточной кулачковой поверхностью для дополнительного подъема узла выталкивателя вверх на второе верхнее расстояние к первой бранше на второе дистальное расстояние для обеспечения достаточной силы для прижатия концевой части скоб к упору для применения в ткани, причем первое верхнее расстояние больше, чем второе верхнее расстояние.
2. Хирургический инструмент по п. 1, в котором часть первой кулачковой наклонной поверхности выполнена с возможностью размещения в пространстве для хранения, когда клиновидные салазки находятся в дистальном положении салазок.
3. Хирургический инструмент по п. 1, в котором клиновидные салазки имеют дистальный носовой участок, причем вторая бранша имеет стенку блокатора, расположенную в ней дистально вдоль центральной линии, причем стенка блокатора выполнена с возможностью приема примыкающих к ней клиновидных салазок и препятствования перемещению клиновидных салазок в дистальном направлении за пределы дистального положения салазок.
4. Хирургический инструмент по п. 3, в котором стенка блокатора образует проходное отверстие, выполненное с возможностью приема дистального носового участка клиновидных салазок в дистальном положении салазок.
5. Хирургический инструмент по п. 1, в котором первый узел концевого выталкивателя имеет первый концевой дистальный выталкиватель, первый концевой промежуточный выталкиватель и первый концевой проксимальный выталкиватель;
причем первый концевой дистальный выталкиватель, первый концевой промежуточный выталкиватель и первый концевой проксимальный выталкиватель функционально соединены таким образом, что первый концевой дистальный выталкиватель консольно закреплен дистально относительно первого концевого промежуточного выталкивателя и первого концевого промежуточного выталкивателя для удлинения пространства для хранения под собой, причем первый концевой дистальный выталкиватель расположен смежно с дистальным концом кассеты со скобами.
6. Хирургический инструмент по п. 5, в котором первый концевой дистальный выталкиватель, первый концевой промежуточный выталкиватель и первый концевой проксимальный выталкиватель функционально соединены таким образом, что первый концевой дистальный выталкиватель и первый концевой проксимальный выталкиватель выровнены в продольном направлении, а первый концевой промежуточный выталкиватель смещен в поперечном направлении от каждого из первого концевого дистального выталкивателя и первого концевого проксимального выталкивателя, причем первый концевой дистальный выталкиватель, первый концевой промежуточный выталкиватель и первый концевой проксимальный выталкиватель соответственно принимают первую концевую часть скоб.
7. Хирургический инструмент по п. 1, в котором кассета со скобами дополнительно содержит второй узел концевого выталкивателя, расположенный смежно с дистальным концом и выполненный с возможностью приема второй концевой части скоб, причем второй узел концевого выталкивателя дополнительно образует под собой пространство для хранения внутри второй бранши.
8. Хирургический инструмент по п. 7, в котором второй узел концевого выталкивателя содержит второй концевой дистальный выталкиватель, второй концевой промежуточный выталкиватель и второй концевой проксимальный выталкиватель;
причем второй концевой дистальный выталкиватель, второй концевой промежуточный выталкиватель и второй концевой проксимальный выталкиватель функционально соединены таким образом, что второй концевой дистальный выталкиватель консольно закреплен дистально относительно второго концевого промежуточного выталкивателя и второго концевого промежуточного выталкивателя для максимального удлинения пространства для хранения под собой, причем второй концевой дистальный выталкиватель расположен смежно с дистальным концом.
9. Хирургический инструмент по п. 8, в котором первый и второй концевые дистальные узлы выталкивателя расположены на противоположных сторонах центральной линии.
10. Хирургический инструмент по п. 9, в котором первый и второй концевые дистальные узлы выталкивателя расположены таким образом, что второй концевой дистальный узел выталкивателя является зеркальным отражением первого концевого дистального узла выталкивателя относительно центральной линии.
11. Хирургический инструмент по пп.7-10, в котором клиновидные салазки имеют первую кулачковую наклонную поверхность и вторую кулачковую наклонную поверхность, причем первая кулачковая наклонная поверхность выполнена с возможностью зацепления с первым концевым дистальным узлом выталкивателя, причем вторая кулачковая наклонная поверхность выполнена с возможностью зацепления со вторым концевым дистальным узлом выталкивателя.
12. Хирургический инструмент по п. 11, в котором первая кулачковая наклонная поверхность имеет первый дистальный носовой участок, причем вторая кулачковая наклонная поверхность имеет второй дистальный носовой участок, причем вторая бранша имеет вторую браншу, имеющую стенку блокатора, расположенную в ней дистально вдоль центральной линии, причем стенка блокатора выполнена с возможностью приема примыкающих к ней клиновидных салазок и препятствования перемещению клиновидных салазок в дистальном направлении за пределы дистального положения салазок, причем стенка блокатора образует по меньшей мере одно проходное отверстие, выполненное с возможностью приема первого и второго дистальных носовых участков клиновидных салазок в дистальном положении салазок.
13. Хирургический инструмент по п. 1, в котором первая бранша имеет первый удлиненный канал, проходящий через нее, и первые метки, причем вторая бранша имеет второй удлиненный канал, проходящий через нее, и вторые метки, причем инструмент дополнительно содержит скальпельный элемент, размещенный в первом и втором каналах, и при этом скальпельный элемент выполнен с возможностью скольжения в дистальном направлении по первому и второму каналам и зацепления с клиновидными салазками для формирования скоб, причем скальпельный элемент содержит первый индикатор в первом канале и второй индикатор во втором канале, причем первый и второй индикаторы в сочетании с первыми и вторыми метками соответственно выполнены с возможностью указывать оператору на применение скоб.
14. Хирургический инструмент по п.1, в котором первое дистальное расстояние меньше, чем второе дистальное расстояние.
| US 20130186931 A1, 25.07.2013 | |||
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ | 1999 |
|
RU2167617C1 |
| СПОСОБ УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ ШТОКА КАМЕРНОГО ПРИВОДА | 2014 |
|
RU2586379C1 |
| СПОСОБ ПОВЫШЕНИЯ ВОСПРОИЗВОДИТЕЛЬНЫХ СПОСОБНОСТЕЙ КОРОВ | 2015 |
|
RU2583630C1 |

