ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Настоящая заявка на патент является родственной и включает путем ссылки нижеследующие одновременно поданные заявки:
Motorized Surgical Cutting and Fastening Instrument, номер в реестре поверенных END6268USNP/070390;
Motorized Surgical Cutting and Fastening Instrument, Having Handle Based Power Source, номер в реестре поверенных END6269USNP/070391;
Surgical Cutting and Fastening Instrument Having RF Electrodes, номер в реестре поверенных END6270USNP/070392; и
Motorized Cutting and Fastening Instrument Having Control Circuit for Optimizing Battery Usage, номер в реестре поверенных END6271USNP/070393.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Хирургические сшивающие аппараты использовались в предшествующем уровне техники, чтобы одновременно выполнять продольный разрез в ткани и накладывать ряды скобок на противолежащие стороны рассечения. Такие инструменты обычно включают в себя пару взаимодействующих зажимных элементов, которые, если инструмент предназначен для эндоскопических или лапароскопических применений, способны проходить через проход канюли. Один из зажимных элементов вмещает кассету для скобок, имеющую, по меньшей мере, два отстоящих в боковом направлении ряда скобок. Другой зажимной элемент определяет упор, имеющий скобоформирующие карманы, расположенные по одной линии с рядами скобок в кассете. Такие инструменты обычно включают в себя множество совершающих возвратно-поступательное движение клиньев, которые при приведении в движение дистально проходят через отверстия в кассете для скобок и зацепляются с ведущими элементами, поддерживающими скобки, чтобы осуществить выстреливания скобок по направлению к упору.
Пример хирургического сшивающего аппарата, подходящего для эндоскопических применений, описан в опубликованной заявке на патент США, номер публикации №2004/0232196 A1, озаглавленной "Surgical stapling instrument having separate distinct closing and firing systems" (Хирургический сшивающий инструмент, имеющий раздельные индивидуальные системы смыкания и выстреливания), раскрытие которой включено в документ путем ссылки. В ходе использования, врач способен смыкать зажимные элементы сшивающего аппарата на ткани, чтобы позиционировать ткань перед выстреливанием. Как только врач определил, что зажимные элементы должным образом захватили ткань, врач может выстреливать из сшивающего аппарата, таким образом осуществляя рассечение и сшивание ткани. Этапы одновременного рассечения и сшивания избегают осложнений, которые могут возникать при выполнении таких действий последовательно с помощью различных хирургических приспособлений, которые соответственно только рассекают или сшивают.
Кроме того, также в предшествующем уровне техники является известным включение электродов в состав рабочего органа, которые могут использоваться, чтобы излучать/принимать энергию высокой частоты для образования гемостатической линии вдоль линии разреза. Патент США №5403312, озаглавленный "Electrosurgical hemostatic device" (в дальнейшем "патент 312"), который включен в документ путем ссылки, раскрывает электрохирургический инструмент с рабочим органом, который зажимает ткань между одним полюсом (или электродом) двухполюсного источника энергии на одной стыкующейся поверхности, и вторым полюсом (или электроде) на второй стыкующейся поверхности. Ткань прижигает ВЧ энергия, приложенная через сдавленную ткань в рабочем органе. Рабочий орган, описанный в "патенте 312", также включает в себя скобки для сшивания ткани, зажатой в рабочем органе.
Хирургические режущие и скрепляющие инструменты с приводом от двигателя, где двигатель приводит в действие режущий инструмент, также являются известными в предшествующем уровне техники, например, как описано в опубликованной заявке на патент США, номер публикации №2007/0175962 A1, озаглавленной "Motor-driven surgical cutting and fastening instrument with tactile position feedback" (Хирургический режущий и скрепляющий инструмент с приводом от двигателя с тактильной обратной связью по положению), который включен в документ путем ссылки.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В одном общем аспекте, варианты осуществления настоящего изобретения направлены на хирургические режущие и скрепляющие инструменты. Инструменты могут быть эндоскопическими инструментами, такими как эндоскопические линейные режущие устройства или циркулярные режущие устройства, или лапароскопические инструменты. Инструменты могут быть состоящими из скобок и/или высокочастотных электродов для закрепления ткани, зажатой в рабочем органе.
Несколько вариантов осуществления, раскрытых в документе, являются подходящими для беспроводных инструментов с приводом от двигателя. Инструменты могут снабжаться энергией посредством блока электропитания, содержащим источник питания постоянного тока, такой как один или несколько соединенных последовательно элементов аккумуляторной батареи. Селекторный переключатель элементов аккумуляторной батареи может управлять количеством элементов батареи, используемых для приведения в действие двигателя в данный момент, чтобы управлять мощностью, доступной для двигателя. Это позволяет оператору инструмента лучше управлять как частотой вращения, так и мощностью двигателя. В другом варианте осуществления инструмент может содержать регулятор мощности, включая, например, преобразователь постоянного тока в постоянный ток, который регулирует напряжение, подаваемое на двигатель. Дополнительно, заданное значение напряжения для регулятора мощности может устанавливаться так, чтобы поставляемое от источника питания напряжение было меньше напряжения, при котором источник питания поставляет максимальную мощность. Таким образом, источник питания (например, ряд последовательно соединенных элементов аккумуляторной батареи) мог бы работать на "левой" или возрастающей стороне кривой мощности, с тем, чтобы было возможно увеличение мощности.
Кроме того, согласно различным вариантам осуществления, источник питания может содержать вторичные аккумуляторные устройства, такие как повторно заряжаемые аккумуляторные батареи или суперконденсаторы. Такие вторичные аккумуляторные устройства могут заряжаться многократно посредством заменяемых батарей. Схема управления зарядкой может управлять зарядкой вторичных аккумуляторных устройств и обеспечивать различные сигналы состояния, такие как предупреждения, когда зарядка вторичных аккумуляторных устройства завершена.
В другом варианте осуществления, блок питания, содержащий вторичные аккумуляторные устройства, может иметь возможность съема с инструмента и соединения с удаленным зарядным устройством. Зарядное устройство может заряжать вторичные аккумуляторные устройства, например, от электрической питающей сети переменного тока или аккумуляторной батареи. Зарядное устройство может также содержать процессор и блок памяти. Данные, сохраненные в памяти съемного блока питания, могут быть загружены в зарядное устройство, из которого они могут быть выгружены в главную ЭВМ для использования и анализа впоследствии, например, пользователем (например, терапевтом), изготовителем или агентом по продаже инструмента, и т.д. Данные могут содержать рабочие параметры, такие как информация о цикле зарядки, а также ID значения для различных заменяемых компонентов инструмента, таких как кассета для скобок.
Кроме того, инструмент может содержать устройство ограничения крутящего момента, чтобы ограничивать крутящий момент, подаваемый двигателем, для ограничения таким образом усилий срабатывания, которые могут повреждать компоненты инструмента. Согласно различным вариантам осуществления, устройства ограничения крутящего момента могут быть электромагнитом или постоянным магнитом, или механическими муфтами, соединенными (либо непосредственно, либо косвенно) с выходным полюсом двигателя.
В другом общем аспекте настоящее изобретение направлено на ВЧ инструменты (то есть, хирургические режущие и закрепляющие инструменты с электродами на рабочем органе для приложения ВЧ энергии к ткани, удерживаемой рабочим органом) с новыми типами конфигураций электродов. В целом, новые конфигурации электродов включают в себя комбинации из активных электродов меньших размеров и обратных электродов больших размеров. Активные электроды меньших размеров используются, чтобы концентрировать терапевтическую энергию на ткани, тогда как обратные электроды больших размеров предпочтительно используются, чтобы выполнять схему с минимальным воздействием на эту область стыка ткани. Обратные электроды обычно имеют большую массу и таким образом способны оставаться более холодными в течение электрохирургического применения.
Кроме того, рабочий орган, согласно различным вариантам осуществления, может содержать ряд коллинеарных сегментированных активных электродов. Сегментированные электроды могут возбуждаться синхронно или, более предпочтительно, последовательно. Активация сегментированных электродов последовательно обеспечивает преимущества в (1) пониженных требованиях к мгновенной мощности вследствие меньшей целевой области коагуляции ткани и (2) предоставления возможности другим сегментам выстреливать, если какой-либо замкнут накоротко.
Кроме того, в документе раскрыт ряд механизмов для активирования ВЧ электродов и для осуществления шарнирного движения рабочего органа.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Различные варианты осуществления настоящего изобретения описаны в документе в качестве примера вместе с нижеследующими фигурами, на которых:
Фигуры 1 и 2 - виды в перспективе хирургического режущего и закрепляющего инструмента согласно различным вариантам осуществления настоящего изобретения;
Фигуры 3-5 - трехмерные покомпонентные виды рабочего органа и вала инструмента согласно различным вариантам осуществления настоящего изобретения;
Фигура 6 - боковой вид рабочего органа согласно различным вариантам осуществления настоящего изобретения;
Фигура 7 - покомпонентный вид рукоятки инструмента согласно различным вариантам осуществления настоящего изобретения;
Фигуры 8 и 9 - частичные виды в перспективе рукоятки согласно различным вариантам осуществления настоящего изобретения;
Фигура 10 - боковой вид рукоятки согласно различным вариантам осуществления настоящего изобретения;
Фигура 11 - схематическое изображение схемы, используемой в инструменте согласно различным вариантам осуществления настоящего изобретения;
Фигуры 12-14 и 17 - схематические изображения схем, используемых для питания двигателя инструмента согласно различным вариантам осуществления настоящего изобретения;
Фигура 15 - блок-схема, иллюстрирующая схему управления зарядкой согласно различным вариантам осуществления настоящего изобретения;
Фигура 16 - блок-схема, иллюстрирующая основное зарядное устройство согласно различным вариантам осуществления настоящего изобретения;
Фигура 18 - иллюстрация типичной кривой мощности батареи;
Фигуры 19-22 - иллюстрация вариантов осуществления электромагнитного устройства муфтового типа ограничения крутящего момента согласно различным вариантам осуществления настоящего изобретения;
Фигуры 23-25, 27-28 и 59 - виды нижней поверхности упора инструмента согласно различным вариантам осуществления настоящего изобретения;
Фигуры 26, 53, 54 и 68 - передние виды в поперечном разрезе рабочего органа согласно различным вариантам осуществления настоящего изобретения;
Фигуры 29-32 - показ варианта осуществления рабочего органа, имеющего ВЧ электроды согласно различным вариантам осуществления настоящего изобретения;
Фигуры 33-36 - показ другого варианта осуществления рабочего органа, имеющего ВЧ электроды согласно различным вариантам осуществления настоящего изобретения;
Фигуры 37-40 - другой вариант осуществления рабочего органа, имеющего ВЧ электроды согласно различным вариантам осуществления настоящего изобретения;
Фигуры 41-44 - другой вариант осуществления рабочего органа, имеющего ВЧ электроды согласно различным вариантам осуществления настоящего изобретения;
Фигуры 45-48 - другой вариант осуществления рабочего органа, имеющего ВЧ электроды согласно различным вариантам осуществления настоящего изобретения;
Фигуры 49-52 - другой вариант осуществления рабочего органа, имеющего ВЧ электроды согласно различным вариантам осуществления настоящего изобретения;
Фигуры 55 и 56 - боковые виды рабочего органа согласно различным вариантам осуществления настоящего изобретения;
Фигура 57 - изображение рукоятки инструмента согласно другому варианту осуществления настоящего изобретения;
Фигура 58 - вид в разрезе рукоятки для исполнения по Фиг. 57 согласно различным вариантам осуществления настоящего изобретения;
Фигуры 60-66 - иллюстрация многослойной печатной платы согласно различным вариантам осуществления настоящего изобретения;
Фигура 67 - схема, иллюстрирующая рабочий орган согласно различным вариантам осуществления настоящего изобретения; и
Фигуры 69 и 70 - изображение инструмента, содержащего узел гибкой шейки согласно различным вариантам осуществления настоящего изобретения.
ОПИСАНИЕ
На Фиг. 1 и 2 изображен хирургический режущий и закрепляющий инструмент 10 согласно различным вариантам осуществления настоящего изобретения. Проиллюстрированное исполнение представляет эндоскопический инструмент и, в целом, описанные в документе варианты осуществления инструмента 10 представляют эндоскопические хирургические режущие и закрепляющие инструменты. Следует отметить, однако, что согласно другим вариантам осуществления настоящего изобретения, инструмент может быть неэндоскопическим хирургическим режущим и закрепляющим инструментом, таким как лапароскопический инструмент.
Изображенный на Фиг. 1 и 2 хирургический инструмент 10 содержит рукоятку 6, вал 8, и артикуляционный рабочий орган 12, шарнирно соединенный с валом 8 в шарнире сочленения 14. Средство 16 управления сочленением может обеспечиваться смежно с рукояткой 6, чтобы воздействовать на вращение рабочего органа 12 вокруг шарнира 14 сочленения. В проиллюстрированном варианте осуществления, рабочий орган 12 выполнен с возможностью выступать в качестве эндоскопического режущего аппарата для зажима, рассечения и сшивания ткани, хотя в других вариантах осуществления могут использоваться различные типы рабочих органов, такие как рабочие органы для других типов хирургических устройств, таких как захватные устройства, режущие устройства, сшивающие аппараты, зажимные устройства, устройства для наложения клипсов, устройства доступа, устройства лекарственной/генной терапии, устройства, использующие ультразвук, ВЧ или лазер, и т.д. Больше подробностей относительно ВЧ устройств можно найти в Патенте 312.
Рукоятка 6 инструмента 10 может включать в себя смыкающий спусковой механизм 18 и выстреливающий спусковой механизм 20, чтобы приводить в действие рабочий орган 12. Будет оценено, что инструменты, имеющие рабочие органы, ориентированные на различные хирургические задачи, могут иметь различные количества или типы спусковых механизмов или других подходящих средств управления для действия рабочим органом 12. Рабочий орган 12 показан отделенным от рукоятки 6, предпочтительно удлиненным валом 8. В одном варианте осуществления, врач или оператор инструмента 10 могут шарнирно перемещать рабочий орган 12 относительно вала 8, используя средство 16 управления сочленением, как описано более подробно в опубликованной заявке на патент США, номер публикации №2007/0158385 A1, озаглавленной "Surgical Instrument Having An Articulating End Effector" (Хирургический инструмент с наличием шарнирно-сочлененного рабочего органа), поданной Geoffrey C. Hueil и др., которая включена в документ путем ссылки.
Рабочий орган 12 в этом примере включает в себя, среди прочего, канал 22 для скобок и зажимной элемент с возможностью поворота и перемещения, такой как упор 24, которые удерживаются с промежутком, обеспечивающим эффективное сшивание и рассечение ткани, зажатой в рабочем органе 12. Рукоятка 6 включает в себя пистолетную ручку 26, в направлении к которой смыкающий спусковой механизм 18 шарнирно сжимается врачом, чтобы вызвать зажим или смыкание упора 24 в направлении к каналу 22 для скобок рабочего органа 12, чтобы таким образом зажать ткань, расположенную между упором 24 и каналом 22. Выстреливающий спусковой механизм 20 находится дальше снаружи от смыкающего спускового механизма 18. Как только смыкающий спусковой механизм 18 фиксируется в положении смыкания, как дополнительно описано ниже, выстреливающий спусковой механизм 20 может слегка вращаться в направлении к пистолетной ручке 26, так что оператор может ее доставать, используя одну руку. Затем оператор может с поворотом вокруг оси тянуть выстреливающий спусковой механизм 20 в направлении к пистолетной ручке 12, чтобы обеспечить сшивание и рассечение зажатой ткани в рабочем органе 12. В других вариантах осуществления могут использоваться различные типы зажимных элементов, кроме упора 24, такие как, например, противолежащая губка, и т.д.
Будет оценено, что термины "проксимальный" и "дистальный" используются в документе в отношении врача, захватывающего рукоятку 6 инструмента 10. Таким образом, рабочий орган 12 является дистальным относительно в большей степени проксимальной рукоятки 6. Будет дополнительно оценено, что для удобства и ясности, пространственные термины, такие как "вертикальный" и "горизонтальный", используются в документе по отношению к чертежам. Однако хирургические инструменты используются во многих ориентациях и положениях, и эти термины не предназначены, чтобы являться ограничительными и абсолютными.
Смыкающий спусковой механизм 18 может приводиться в действие первым. Как только врач удовлетворен расположением рабочего органа 12, врач может вытянуть назад смыкающий спусковой механизм 18 до ее полностью сомкнутого, фиксированного положения, ближайшего к пистолетной ручке 26. Затем может быть приведен в действие выстреливающий спусковой механизм 20. Выстреливающий спусковой механизм 20 возвращается в открытое положение (показанное на Фиг. 1 и 2) при снятии врачом давления, как описано более полно ниже. Пусковая кнопка на рукоятке 6 при нажатии может освобождать зафиксированный смыкающий спусковой механизм 18. Пусковая кнопка может быть исполнена в различных формах, таких как, например, выдвижная пусковая кнопка 160, показанная на Фиг. 7, или любой из механизмов, описанных в опубликованной заявке на патент США, номер публикации №2007/01755955 A1, которая включена в документ путем ссылки.
На Фиг. 3 показан трехмерный покомпонентный вид рабочего органа 12 согласно различным вариантам осуществления. Как показано в проиллюстрированном варианте осуществления, рабочий орган 12 в дополнение к предварительно упомянутому каналу 22 и упору 24 может включать в себя режущий инструмент 32, салазки 33, кассету 34 скобок, которая с возможностью съема помещается в канале 22, и ходовой винт 36. Режущим инструментом 32 может быть, например, нож. Упор 24 может шарнирно открываться и смыкаться в точке 25 поворота, соединенной с проксимальным концом канала 22. Упор 24 может также включать на своем проксимальном конце ушко 27, которое вставляется в компонент механической системы смыкания (описанной дополнительно ниже), чтобы открывать и смыкать упор 24. Когда смыкающий спусковой механизм 18 приводится в действие, то есть, втягивается пользователем инструмента 10, упор 24 может шарнирно поворачиваться вокруг точки 25 поворота в зажатое или сомкнутое положение. Если зажимание рабочего органа 12 является удовлетворительным, оператор может приводить в действие выстреливающий спусковой механизм 20, который, как пояснено более подробно ниже, заставляет нож 32 и салазки 33 передвигаться продольно по каналу 22, тем самым разрезая ткань, зажатую внутри рабочего органа 12. Перемещение салазок 33 вдоль канала 22 заставляет скобки из кассеты 34 скобок вбиваться через разрезанную ткань и к сомкнутому упору 24, который загибает скобки, чтобы закрепить разрезанную ткань. В различных вариантах осуществления салазки 33 могут быть составным компонентом кассеты 34. Патент США №6978921, озаглавленный "Surgical stapling instrument incorporating an E-beam firing mechanism" (Хирургический сшивающий инструмент с механизмом прошивания электронным лучом), который включен в документ путем ссылки, обеспечивает больше подробностей о таких двухходовых режущих и закрепляющих инструментах. Салазки 33 могут быть частью кассеты 34, так что при отводе ножа 32 после операции разреза, салазки 33 не отводятся.
Следует отметить, что хотя описанные в документе варианты осуществления инструмента 10 используют рабочий орган 12, который скрепляет скобками разрезанную ткань, в других вариантах осуществления могут использоваться различные способы для скрепления или обеспечения непроницаемости разрезанной ткани. Например, также могут использоваться рабочие органы, которые используют ВЧ энергию, или связывающие вещества для скрепления разрезанной ткани. Патент США №5709680, озаглавленный "Electrosurgical Hemostatic Device", выданный Yates и др., и патент США №688270, озаглавленный "Electrosurgical Hemostatic Device with Recessed and/or Offset Electrodes", выданный Yates и др., которые включены в документ путем ссылки, раскрывают эндоскопический режущий инструмент, который использует ВЧ энергию для обеспечения непроницаемости разрезанной ткани. Опубликованная заявка на патент США, номер публикации №2007/0102453 A1, поданная Jerome R. Morgan и др., и опубликованная заявка на патент США, номер публикации №2007/0102452 A1, поданная Frederick E. Shelton, IV, и др., которые также включены в документ путем ссылки, раскрывают эндоскопические режущие инструменты, которые используют связывающее вещество, чтобы скреплять разрезанную ткань. Соответственно, хотя описание ниже в документе относится к операциям разрезания/сшивания скобками и т.п., должно быть понятно, что оно представляет примерный вариант осуществления и не предполагает являться ограничивающим. Другие способы скрепления ткани также могут использоваться.
На Фиг. 4 и 5 показаны трехмерные покомпонентные виды и на Фиг. 6 показан боковой вид рабочего органа 12 и вала 8 согласно различным вариантам осуществления. Как показано в проиллюстрированном варианте осуществления, вал 8 может включать в состав проксимальную смыкающую трубку 40 и дистальную смыкающую трубку 42, шарнирно соединенные шатунами 44. Дистальная смыкающая трубка 42 включает в себя отверстие 45, в которое вставляется ушко 27 упора 24 для того, чтобы открывать и смыкать упор 24, как дополнительно описано ниже. Установленной внутри смыкающих трубок 40, 42 может быть непосредственно ближняя хребетная трубка 46. Внутри ближней хребетной трубки 46 может располагаться главный вращательный (или проксимальный) приводной вал 48, который взаимодействует с вторичным (или дистальным) приводным валом 50 через узел 52 конической шестерни. Вторичный приводной вал 50 соединяется с приводной шестерней 54, которая зацепляется с проксимальной приводной шестерней 56 ходового винта 36. Вертикальная коническая шестерня 52b может помещаться и шарнирно поворачиваться в отверстии 57 в дистальном конце проксимальной хребетной трубки 46. Дистальная хребетная трубка 58 может использоваться, чтобы вмещать вторичный приводной вал 50 и приводные шестерни 54, 56. Совместно, главный приводной вал 48, вторичный приводной вал 50 и узел сочленения (например, узел 52a-c конических шестерен) иногда именуется в документе как "узел главного приводного вала".
Подшипник 38, расположенный на дистальном конце канала 22 для скобок, вмещает приводной винт 36, позволяя приводному винту 36 свободно вращаться относительно канала 22. Ходовой винт 36 может сопрягаться с резьбовым отверстием (не показано) ножа 32, так что вращение винта 36 заставляет нож 32 поступательно перемещается дистально или проксимально (в зависимости от направления вращения) через канал 22 для скобок. Соответственно, когда вызывается вращение главного приводного вала 48 приведением в действие выстреливающего спускового механизма 20 (как пояснено более подробно ниже), узел 52a-c конических шестерен заставляет вращаться вторичный приводной вал 50, который в свою очередь, вследствие входа в зацепление приводных шестерен 54, 56, вызывает вращение ходового винта 36, что заставляет перемещаться продольно вдоль канала 22 приводной элемент 32 ножа, чтобы разрезать любую ткань, зажатую внутри рабочего органа. Салазки 33 могут быть выполнены, например, из пластмассы, и могут иметь наклонную дистальную поверхность. Когда салазки 33 проходят по каналу 22, наклонная передняя поверхность может выталкивать или вбивать скобки в кассете скобок через зажатую ткань и по направлению к упору 24. Упор 24 загибает скобки, таким образом, сшивая разрезанную ткань. Когда нож 32 отводится, нож 32 и салазки 33 могут расцепляться, таким образом выходя из салазок 33 на дистальном конце канала 22.
На Фиг. 7-10 иллюстрируется примерный вариант осуществления эндоскопического режущего аппарата с приводом от двигателя. Проиллюстрированный вариант осуществления предусматривает обратную связь с пользователем, относящуюся к использованию и нагружающему усилию для режущего инструмента в рабочем органе. Кроме того, вариант осуществления может использовать мощность, обеспечиваемую пользователем в ходе отвода выстреливающего спускового механизма 20, для питания устройства (так называемый режим "поддержки мощности"). Как показано в проиллюстрированном варианте осуществления, рукоятка 6 включает в себя внешние нижние боковые части 59, 60 и внешние верхние боковые части 61, 62, которые пригнаны одна к другой, чтобы образовать, в целом, внешнюю поверхность рукоятки 6. Аккумуляторная батарея 64, такая как литиево-ионная аккумуляторная, может обеспечиваться в части 26 пистолетной ручки в рукоятке 6. Аккумуляторная батарея 64 приводит в действие двигатель 65, расположенный в верхней части 26 пистолетной ручки в рукоятке 6. Согласно различным вариантам осуществления, для приведения в действие двигателя 65 может использоваться ряд элементов аккумуляторной батареи, соединенных последовательно.
Двигателем 65 может быть щеточный приводной двигатель постоянного тока, имеющий максимальную скорость вращения приблизительно 25000 оборотов в минуту без нагрузки. Двигатель 64 может приводить в движение узел 66 90°-ный конических шестерен, содержащий, первую коническую шестерню 68, и вторую коническую шестерню 70. Узел 66 конических шестерен может приводить в движение узел 72 планетарной шестерни. Узел 72 планетарной шестерни может включать в себя ведущую шестерню 74, соединенную с приводным валом 76. Ведущая шестерня 74 может приводить в движение сопряженную венцовую шестерню 78, которая приводит в движение барабан 80 косозубой шестерни через приводной вал 82. Кольцо 84 может быть посажено на резьбе на барабан 80 косозубой шестерни. Таким образом, когда двигатель 65 вращается, обеспечивается перемещение кольца 84 вдоль барабана 80 косозубой шестерни посредством расположенных между ними узла 66 конической шестерни, узла 72 планетарной шестерни, и венцовой шестерни 78.
Рукоятка 6 также может включать в себя датчик 110 двигателя запуска во взаимодействии с выстреливающим спусковым механизмом 20, чтобы выявлять, когда выстреливающий спусковой механизм 20 был втянут оператором (или "сомкнут") в направлении к части 26 пистолетной ручки рукоятки 6, чтобы таким образом активировать действие разрезания/скрепления посредством рабочего органа 12. Датчиком 110 может быть пропорциональный датчик, такой как, например, реостат, или переменный резистор. Когда выстреливающий спусковой механизм 20 втягивается, датчик 110 выявляет перемещение и посылает электрический сигнал, указывающий напряжение (или мощность), подлежащее подаче на двигатель 65. Когда датчиком 110 является переменный резистор или подобное, скорость вращения двигателя 65 может быть обычно пропорциональной величине перемещения выстреливающего спускового механизма 20. То есть, если оператор только слегка втягивает или смыкает выстреливающий спусковой механизм 20, скорость вращения двигателя 65 является относительно низкой. Когда выстреливающий спусковой механизм 20 полностью втянут (или находится в полностью сомкнутом положении), скорость вращения двигателя 65 достигает своего максимума. Другими словами, чем энергичнее пользователь втягивает выстреливающий спусковой механизм 20, тем большая величина напряжения подается на двигатель 65, обеспечивая увеличение скорости вращения.
Рукоятка 6 может включать в себя среднюю деталь 104 рукоятки, смежную с верхней частью выстреливающего спускового механизма 20. Рукоятка 6 может также содержать смещающую пружину 112, соединенную между штырями на средней детали 104 рукоятки и выстреливающим спусковым механизмом 20. Смещающая пружина 112 может смещать выстреливающий спусковой механизм 20 в направлении полностью открытого положения. Таким образом, когда оператор освобождает выстреливающий спусковой механизм 20, смещающая пружина 112 будет тянуть выстреливающий спусковой механизм 20 в его открытое положение, таким образом снимая приведение в действие датчика 110, таким образом останавливая вращение двигателя 65. Кроме того, в силу наличия смещающей пружины 112, всякий раз, когда пользователь смыкает выстреливающий спусковой механизм 20, пользователь будет испытывать сопротивление по отношению к действию смыкания, таким образом, обеспечивая пользователя обратной связью в отношении величины вращения, обусловленного двигателем 65. Дополнительно, оператор может остановить отвод выстреливающего спускового механизма 20 для снятия усилия с датчика 100, чтобы остановить тем самым двигатель 65. По существу пользователь может останавливать использование рабочего органа 12, таким образом обеспечивая оператору меру управления операцией разрезания/закрепления.
Дистальный конец барабана 80 косозубой шестерни включает в себя дистальный приводной вал 120, приводящий в движение венцовую шестерню 122, которая сопряжена с ведущей шестерней 124. Ведущая шестерня 124 соединяется с главным приводным валом 48 узла главного приводного вала. Таким образом, вращение двигателя 65 обеспечивает вращение узла главного приводного вала, что вызывает приведение в действие рабочего органа 12, как описано выше.
Кольцо 84, навернутое на барабан 80 косозубой шестерни, может включать в себя штырь 86, который расположен внутри щели 88 кулисы 90. Кулиса 90 имеет отверстие 92 на ее противоположном конце 94, которое вмещает шарнирный палец 96, который соединяется между внешними боковыми деталями 59, 60 рукоятки. Шарнирный палец 96 также проходит через отверстие 100 в выстреливающем спусковом механизме 20 и отверстие 102 в средней детали 104 рукоятки.
Кроме того, рукоятка 6 может включать в себя датчик 130 обратного хода двигателя (или окончания хода) и датчик 142 останова двигателя (или начала хода). В различных вариантах осуществления, датчиком 130 обратного хода двигателя может быть концевой выключатель, расположенный на дистальном конце барабане 80 косозубой шестерни, так что кольцо 84, навернутое на барабан 80 косозубой шестерни, входит в контакт и отключает датчик 130 обратного хода двигателя, когда кольцо 84 доходит до дистального конца барабана 80 косозубой шестерни. Датчик 130 обратного хода двигателя, если активирован, посылает сигнал на двигатель 65, чтобы изменить на противоположное направление его вращения, таким образом, извлекая нож 32 из рабочего органа 12 после операции разрезания. Датчиком 142 останова двигателя может быть, например, нормально-замкнутый концевой выключатель. В различных вариантах осуществления он может быть расположен на проксимальном конце барабана 80 косозубой шестерни, так что кольцо 84 отключает выключатель 142, когда кольцо 84 доходит до проксимального конца барабана 80 косозубой шестерни.
В действии, когда оператор инструмента 10 отводит назад выстреливающий спусковой механизм 20, датчик 110 выявляет использование выстреливающего спускового механизма 20 и посылает сигнал на двигатель 65, чтобы вызвать вращение в прямом направлении двигателя 65, например, со скоростью, пропорциональной усилию, с которым оператор отводит назад выстреливающий спусковой механизм 20. Вращение в прямом направлении двигателя 65 в свою очередь заставляет вращаться венцовую шестерню 78 на дистальном конце узла 72 планетарной шестерни, таким образом обеспечивая вращение барабана 80 косозубой шестерни, заставляя кольцо 84, навернутое на барабан 80 косозубой шестерни, перемещаться дистально по барабану 80 косозубой шестерни. Вращение барабана 80 косозубой шестерни также приводит в движение узел главного приводного вала, как описано выше, который в свою очередь вызывает развертывание ножа 32 в рабочем органе 12. То есть, нож 32 и салазки 33 вынуждены пересекать канал 22 в продольном направлении, тем самым разрезая ткань, зажатую в рабочем органе 12. К тому же, обеспечивается, чтобы сшивающее действие рабочего органа 12 происходило в вариантах осуществления, где используется рабочий орган типа сшивающего аппарата.
К моменту времени завершения режущего/скрепляющего действия рабочего органа 12, кольцо 84 на барабане 80 косозубой шестерни будет доходить до дистального конца барабана 80 косозубой шестерни, тем самым заставляя выключиться датчик 130 обратного хода двигателя, который посылает сигнал на двигатель 65, чтобы вызвать изменение двигателем 65 его вращения на обратное. Это в свою очередь вызывает отвод назад ножа 32, и также вызывает перемещение кольца 84 на барабане 80 косозубой шестерни назад к проксимальному концу барабана 80 косозубой шестерни.
Средняя деталь 104 рукоятки включает в себя задний буртик 106, который входит в зацепление с кулисой 90, как лучше всего показано на фигурах Фиг. 8 и 9. Средняя деталь 104 рукоятки также имеет стопор 107 поступательного движения, который зацепляется с выстреливающим спусковым механизмом 20. Перемещение кулисы 90 управляется, как пояснено выше, посредством вращения двигателя 65. Когда кулиса 90 вращается против часовой стрелки, если кольцо 84 перемещается от проксимального конца барабана 80 косозубой шестерни к дистальному концу, средняя деталь 104 рукоятки будет свободно вращаться против часовой стрелки. Таким образом, если пользователь втягивает выстреливающий спусковой механизм 20, то выстреливающий спусковой механизм 20 зацепляется со стопором 107 поступательного движения в средней детали 104 рукоятки, заставляя среднюю деталь 104 рукоятки вращаться против часовой стрелки. Благодаря зацеплению заднего буртика 106 с кулисой 90, однако, средняя деталь 104 рукоятки будет способна только вращаться против часовой стрелки, насколько позволяет кулиса 90. Таким образом, если двигатель 65 прекращает вращение по некоторым причинам, то кулиса 90 прекратит вращаться, и пользователь не будет способен далее втягивать выстреливающий спусковой механизм 20, поскольку средняя деталь 104 рукоятки не будет свободно вращаться против часовой стрелки из-за кулисы 90.
Компоненты примерной системы смыкания для закрывания (или зажимания) упора 24 рабочего органа 12 путем отвода назад смыкающего спускового механизма 18 также показаны на фигурах Фиг. 7-10. В проиллюстрированном варианте осуществления, система смыкания включает в себя вилку 250, соединенную со смыкающим спусковым механизмом 18 посредством оси 251, которая вставляется через центрированные отверстия, имеющиеся и в смыкающем спусковом механизме 18, и в вилке 250. Шарнирный палец 252, вокруг которого осуществляет поворот смыкающий спусковой механизм 18, вставляется сквозь другое отверстие в смыкающем спусковом механизме 18, которое расположено в стороне от того места, где ось 251 вставляется через смыкающий спусковой механизм 18. Таким образом, отведение смыкающего спускового механизма 18 смыкания вызывает вращение часовой стрелки верхней части смыкающего спускового механизма 18, к которой вилка 250 прикрепляется с помощью оси 251. Дистальный конец вилки 250 соединяется через ось 254 с первым кронштейном 256 смыкания. Первый кронштейн 256 смыкания соединяется со вторым кронштейном 258 смыкания. Вместе кронштейны 256, 258 смыкания определяют отверстие, в котором располагается и удерживается проксимальный конец проксимальной трубки 40 смыкания (см. Фигуру 4), так что продольное перемещение кронштейнов 256, 258 смыкания вызывает продольное перемещение посредством проксимальной трубки 40 смыкания. Инструмент 10 также включает в себя шток 260 смыкания, расположенный внутри проксимальной трубки 40 смыкания. Шток 260 смыкания может включать в себя окно 261, в которое помещается штырь 263 на одной из внешних деталей рукоятки, такой как внешняя нижняя боковая часть 59 в проиллюстрированном варианте осуществления, чтобы прочно соединять шток 260 смыкания с рукояткой 6. Таким образом, проксимальная трубка 40 смыкания способна перемещаться в продольном направлении относительно штока 260 смыкания. Шток 260 смыкания может также включать в себя дистальную манжету 267, которая входит в полость 269 в проксимальной хребетной трубке 46 и удерживается посредством колпачка 271 (см. Фигуру 4).
В действии, когда вилка 250 вращается вследствие отведения смыкающего спускового механизма 18, кронштейны 256, 258 смыкания обеспечивают дистальное перемещение проксимальной трубки 40 смыкания (то есть, от конца рукоятки инструмента 10), которое обуславливает дистальное перемещение дистальной трубки 42 смыкания, которое заставляет упор 24 вращаться вокруг точки 25 поворота в зажатое или сомкнутое положение. Когда смыкающий спусковой механизм18 расфиксируется из фиксированного положения обеспечивается, что проксимальная трубка 40 смыкания скользит проксимально, что заставляет дистальную трубку 42 смыкания скользить проксимально, что посредством ушка 27, вставляемого в окно 45 дистальной трубки 42 смыкания, заставляет упор 24 поворачиваться вокруг точки 25 поворота в открытое или незажатое положение. Таким образом, посредством отвода назад и фиксации смыкающего спускового механизма 18, оператор может зажимать ткань между упором 24 и каналом 22, и может разжимать ткань после режущего/сшивающего действия путем расфиксации выстреливающего спускового механизма 20 из фиксированного положения.
На Фиг. 11 показано схематическое изображение электрической схемы инструмента 10 согласно различным вариантам осуществления настоящего изобретения. Когда оператор первоначально втягивает выстреливающий спусковой механизм 20 после фиксации смыкающего спускового механизма 18, активируется датчик 110, позволяя току течь через него. Если нормально разомкнутый переключатель 130 датчика обратного хода двигателя разомкнут (означая, что не был достигнут конец рабочего хода рабочего органа), ток будет течь на однополюсное двухпозиционное реле 132. Поскольку переключатель 130 датчика обратного хода двигателя не замкнут, дроссель 134 в составе реле 132 не будет возбужден, так что реле 132 будет находиться в своем невозбужденном состоянии. Схема также включает в себя датчик блокировки кассеты 136. Если рабочий орган 12 включает в себя кассету 34 скобок, датчик 136 будет находиться в замкнутом состоянии, позволяя току течь. Иначе, если рабочий орган 12 не включает в себя кассету для скобок 34, датчик 136 будет разомкнут, таким образом препятствуя аккумуляторной батарее 64 подавать питание на двигатель 65.
Когда кассета 34 для скобок присутствует, является замкнутым датчик 136, который возбуждает однополюсное однопозиционное реле 138. Когда реле 138 возбуждено, ток течет через реле 136, через датчик 110 резистора, и на двигатель 65 через двухполюсное двухпозиционное реле 140, таким образом приводя в действие двигатель 65, и позволяя ему вращаться в прямом направлении. Когда рабочий орган 12 достигает конца своего хода, будет активироваться датчик 130 обратного хода двигателя, тем самым замыкая переключатель 130 и возбуждая реле 134. Это заставляет реле 134 принимать свое возбужденное состояние (не показано на Фиг. 13), что заставляет ток обходить датчик 136 блокировки кассеты и переменный резистор 110, и вместо этого заставляет ток течь и на нормально-замкнутое двухполюсное двухпозиционное реле 142, и обратно на двигатель 65, но, до некоторой степени, через реле 140, что обеспечивает изменение двигателем 65 направления его вращения на обратное. Поскольку переключатель 142 датчика останова двигателя является нормально замкнутым, ток будет течь обратно на реле 134, чтобы держать его замкнутым, пока не будет разомкнут переключатель 142. Когда нож 32 является полностью отведенным, активируется переключатель 142 датчика двигателя останова, заставляя переключатель 142 разомкнуться, таким образом снимая питание с двигателя 65.
В других вариантах осуществления, предпочтительнее датчика 110 пропорционального типа, может использоваться датчик двухпозиционного типа. В таких вариантах осуществления скорость вращения двигателя 65 не будет пропорциональной усилию, приложенному оператором. Скорее, двигатель 65 будет обычно вращаться с постоянной скоростью. Но оператор будет все еще испытывать обратную связь по усилию, поскольку выстреливающий спусковой механизм 20 находится в зацеплении с цепью зубчатых передач привода.
Дополнительные конфигурации для моторизованных хирургических инструментов раскрыты в опубликованной заявке на патент США, номер публикации №2007/0175962 A1, озаглавленной "Motor-driven surgical cutting and fastening instrument with tactile position feedback" (Хирургический режущий и закрепляющий инструмент с осязательной обратной связью по положению с приводом от двигателя), который включен в документ путем ссылки.
В моторизованном хирургическом инструменте, таком как один из описанных выше моторизованных эндоскопических инструментов, или в моторизованном циркулярном режущем инструменте, двигатель может обеспечиваться приводиться в действие рядом элементов аккумуляторной батареи, соединенных последовательно. Дополнительно, в некоторых обстоятельствах может требоваться приводить в действие двигателя с помощью некоторой доли общего числа элементов аккумуляторной батареи. Например, как показано на Фиг. 12, двигатель 65 может приводиться в действие блоком 299 питания, содержащим шесть (6) элементов 310 аккумуляторной батареи, соединенных последовательно. Элементами 310 аккумуляторной батареи могут быть, например, 3-х-вольтовые литиевые элементы батареи, такие как элементы аккумуляторной батареи CR 123A, хотя в других вариантах осуществления могут использоваться другие типы элементов аккумуляторных батарей (включая элементы аккумуляторных батарей с различными уровнями напряжения и/или различными химическими составами). Если шесть 3-х-вольтовых элементов 310 аккумуляторной батареи были соединены последовательно для приведения в действие двигатель 65, то полным напряжением, доступным для приведения в действие двигателя 65, будет 18 вольт. Элементы 310 аккумуляторной батареи могут содержать перезаряжаемые или неперезаряжаемые элементы аккумуляторной батареи.
В таком варианте осуществления, при самых тяжелых нагрузках, входное напряжение на двигатель 65 может падать приблизительно до значения от девяти до десяти вольт. В таком рабочем состоянии блок 299 питания поставляет максимальную мощность на двигатель 65. Соответственно, как показано на Фиг. 12, схема может включать в себя переключатель 312, который может давать возможность для приведения в действие двигателя 65 либо (1) посредством всех элементов 310 аккумуляторной батареи или (2) посредством доли элементов 310 аккумуляторной батареи. Как показано на Фиг. 12, путем надлежащего выбора переключатель 312 может сделать возможным приведение в действие двигателя 65 всеми шестью элементами аккумуляторной батареи или четырьмя элементами из аккумуляторной батареи. Таким образом, переключатель 312 может использоваться для приведения в действие двигателя 65 либо 18 вольт (при использовании всех шести элементов батареи 310), либо 12 вольт (например, используя четыре элемента из элементов второй батареи). В различных вариантах осуществления выбор конструктивного решения для количества элементов батареи в доле, которая используется для приведения в действие двигателя 65, может быть основан на напряжении, требуемом двигателю 65 для работы с наибольшей производительностью для самых тяжелых нагрузок.
Переключателем 312 может быть, например, электромеханический переключатель, такой как микровыключатель. В других вариантах осуществления, переключатель 312 может быть реализован с использованием твердотельного переключателя, такого как транзистор. Второй переключатель 314, такой как кнопочный выключатель, может использоваться, чтобы контролировать, подается ли вообще питание на двигатель 65. Также, реверсивный переключатель 316 может использоваться, чтобы контролировать, вращается ли двигатель 65 в прямом направлении или в обратном направлении. Реверсивный переключатель 316 может быть реализован с использованием двухполюсного - двухпозиционного переключателя, такого как реле 140, показанное на Фиг. 11.
В действии, пользователь инструмента 10 может выбирать требуемый уровень мощности путем использования некоторого вида управления с помощью переключателя, такого как позиционный переключатель (не показан), такого как тумблер, механический рычажный переключатель, или кулачка, который управляет положением переключателя 312. Затем пользователь может активировать второй переключатель 314, чтобы соединить выбранные элементы 310 аккумуляторной батареи с двигателем 65. Кроме того, показанная на Фиг. 12 схема может использоваться для подачи питания на двигатель для других типов моторизованных хирургических инструментов, таких как циркулярные режущие и/или лапароскопические инструменты. Больше подробностей относительно циркулярных режущих инструментов может быть найдено в опубликованных заявках на патент США, номер публикации №2006/0047307 A1 и номер публикации №2007/0262116 A1, которые включены в документ путем ссылки.
В других вариантах осуществления, как показано на Фиг. 13, первичный источник 340 питания, такой как элемент аккумуляторной батареи, такой как элемент батареи CR2 или CR123A, может использоваться для зарядки некоторого количества вторичных аккумуляторных устройства 342. Первичный источник 340 питания может содержать один или несколько последовательно соединенных элементов аккумуляторной батареи, которые в проиллюстрированном варианте осуществления являются предпочтительно заменяемыми. Вторичные аккумуляторные устройства 342 могут содержать, например, повторно заряжаемые элементы аккумуляторной батареи и/или суперконденсаторы (также известные как "ультраконденсаторы" или "электрические двухслойные конденсаторы" (EDLC)). Суперконденсаторы являются электрохимическими конденсаторами, которые имеют необычайно высокую удельную плотность энергии по сравнению с обычными электролитическими конденсаторами, обычно на порядок в тысячи раз более высокую, чем у высокоемкостного электролитического конденсатора.
Первичный источник 340 питания может заряжать вторичные аккумуляторные устройства 342. После того, как достаточно заряжен, первичный источник 340 питания может быть удален, и могут использоваться вторичные аккумуляторные устройства 342 для приведения в действие двигателя 65 в течение процедуры или операции. Аккумулирующие устройства 342 могут требовать приблизительно от пятнадцати до тридцати минут для зарядки в различных обстоятельствах. Суперконденсаторы характеризуются возможностью заряжаться и разряжаться чрезвычайно быстро в сравнении с обычными батареями. Кроме того, тогда как аккумуляторные батареи хороши только для ограниченного количества циклов зарядки/разрядки, суперконденсаторы зачастую могут заряжаться/разряжаться многократно, иногда для десятков миллионов циклов. Для вариантов осуществления, использующих суперконденсаторы в качестве вторичных аккумуляторных устройств 342, суперконденсаторы могут содержать углеродные нанотрубки, проводящие полимеры (например, polyacenes), или углеродные аэрогели.
Как показано на Фиг. 14, схема 344 управления зарядкой может использоваться для определения, когда вторичные аккумуляторные устройства 342 будут достаточно заряжены. Схема 344 управления зарядкой может включать в себя индикатор, такой как один или несколько светоизлучающих диодов, жидкокристаллический индикатор, и т.д., который активируется, чтобы предупреждать пользователя инструмента 10, если вторичные аккумуляторные устройства 342 достаточно заряжены.
Первичный источник 340 питания, вторичные аккумуляторные устройства 342, и схема 344 управления зарядкой могут быть частью блока питания в части 26 пистолетной ручки рукоятки 6 инструмента 10, или в другой части инструмента 10. Блок питания может иметь возможность съема из части 26 пистолетной ручки, в каком случае, если инструмент 10 должен использоваться для хирургической операции, блок питания может вставляться стерильно в часть 26 пистолетной ручки (или в другую позицию в инструменте согласно другим вариантам осуществления), например, медсестрой, ассистирующей в хирургической операции. После вставки блока питания, медсестра может помещать заменяемый первичный источник 340 питания в блок питания для зарядки вторичных аккумуляторных устройств 342 на некоторый период времени прежде использования инструмента 10, например, на тридцать минут. Когда вторичные аккумуляторные устройства 342 заряжены, схема 344 управления зарядкой может указывать, что блок питания готов к использованию. В этот момент заменяемый первичный источник 340 питания может быть удален. В течение работы пользователь инструмента 10 может затем активировать двигатель 65, например, путем активации переключателя 314, посредством чего вторичные аккумуляторные устройства 342 приводят в действие двигатель 65. Таким образом, вместо наличия нескольких сменных аккумуляторных батарей для питания двигателя 65, в таком варианте осуществления может использоваться одна сменная батарея (в качестве первичного источника 340 питания), и вторичные аккумуляторные устройства 342 могут быть повторно используемыми. В альтернативных вариантах осуществления, однако, следует отметить, что вторичными аккумуляторными устройствами 342 могут быть неперезаряжаемые и/или однократно используемые. Вторичные аккумуляторы 342 могут использоваться вместе с переключателем 312 выбора элемента батареи, описанным выше в связи с Фиг. 12.
Схема 344 управления зарядкой может также включать в себя индикаторы (например, светоизлучающие диоды или светодиодные индикаторы), которые указывают сколько заряда остается во вторичных аккумуляторных устройствах 342. Таким образом, хирург (или другой пользователь инструмента 10) может видеть, сколько заряда остается в течение курса процедуры, включающей использование инструмента 10.
Схема 344 управления зарядкой, как показано на Фиг. 15, может содержать измеритель 345 зарядов, чтобы измерять заряд по всем вторичным аккумуляторам 342. Схема 344 управления зарядкой может также содержать энергонезависимое запоминающее устройство 346, такое как флэш-память или ROM, и один или несколько процессоров 348. Процессор(ы) 348 может соединяться с памятью 346 для управления памятью. Кроме того, процессор(ы) 348 может соединяться с измерителем 345 зарядов, чтобы считывать показания и иным образом управлять измерителем 345 зарядов. Дополнительно, процессор(ы) 348 может управлять светоизлучающими диодами или другими устройствами вывода в составе схемы 344 управления зарядкой. Процессор(ы) 348 может хранить параметры инструмента 10 в памяти 346. Параметры могут включать в себя рабочие параметры инструмента, воспринимаемые посредством различных датчиков, которые могут устанавливаться или использоваться в инструменте 10, такие как, например, количество выстреливаний, уровни квалификации участвующих лиц, расстояние промежутка сдавливания между противолежащими зажимными губками рабочего органа 12, величина поворота и т.д. Дополнительно, параметры, хранимые в памяти 346, могут содержать ID значения для различных компонентов инструмента 10, которые схема 344 управления зарядкой может считывать и хранить. Компонентами, имеющими такие ID, могут быть заменяемые компоненты, такие как кассета 34 для скобок. Эти ID могут быть, например, RFID, которые схема 344 управления зарядкой считывает через ретранслятор 350 RFID. Ретранслятор 350 RFID может считывать RFID из компонентов инструмента, таких как кассета для скобок 34, которые включают в себя метки RFID. ID значения могут считываться, сохраняться в памяти 346, и сравниваться посредством процессора 348 с перечнем допустимых значений ID, хранимых в памяти 346 или другой памяти, связанной со схемой управления зарядкой, чтобы определять, например, является ли подлинным и/или надлежащим съемный/заменяемый компонент, связанный со считанным значением ID. Согласно различным вариантам осуществления, если процессор 348 принимает решение, что связанный со считанным значением съемный/заменяемый компонент не является подлинным, схема 344 управления зарядкой может препятствовать использованию инструментом 10 блока питания, например, путем размыкания переключателя (не показано), что будет препятствовать подаче мощности от блока питания на двигатель 65. Согласно различным вариантам осуществления, различные параметры, которые процессор 348 может оценивать для определения, является ли компонент подлинным и/или надлежащим, включают в себя: «код даты»; «модель/тип компонента»; «изготовитель»; «региональная информация»; и «предыдущие коды ошибок».
Схема 344 управления зарядкой может также содержать интерфейс 352 ввода-вывода для обмена информацией с другим устройством, например, как описано ниже. Таким образом, хранимые в памяти 346 параметры могут быть загружены на другое устройство. Интерфейсом 352 ввода-вывода может быть, например, интерфейс проводной или беспроводной связи.
Как упомянуто прежде, блок питания может содержать вторичные аккумуляторы 342, схему 344 управления зарядкой, и/или реверсивный переключатель 316. Согласно различным вариантам осуществления, как показано на Фиг. 16, блок 299 питания может соединяться с зарядным устройством 362, которое, среди прочего, может заряжать вторичные аккумуляторы 342 в блоке питания. Зарядное устройство 362 может соединяться с блоком 299 питания путем выполняемого стерильно соединения зарядного устройства 362 с блоком 299 питания при установке блока питания в инструменте 10. В других вариантах осуществления, где блок питания является съемным, зарядное устройство 362 может быть соединено с блоком 299 питания путем удаления блока 299 питания из инструмента 10 и его соединения с зарядным устройством 362. Для таких вариантов осуществления после того, как зарядное устройство 362 достаточно зарядит вторичные аккумуляторы 342, блок 299 питания может стерильно устанавливаться в инструменте 10.
Как показано на Фиг. 16, зарядное устройство 362 может содержать источник 364 питания для зарядки вторичных аккумуляторов 342. Источником 364 питания для зарядного устройства 362 может быть, например, аккумуляторная батарея (или несколько последовательно соединенных батарей), или преобразователь переменного тока в постоянный ток, преобразующий в постоянную мощность переменного тока, например, от электрической питающей сети, в постоянный ток или любой другой подходящий источник питания для зарядки вторичных аккумуляторов 342. Зарядное устройство 362 также может содержать индикаторные устройства, такие как светоизлучающие диоды, жидкокристаллический индикатор, и т.д., чтобы показывать состояние зарядки вторичных аккумуляторов 342.
Кроме того, как показано на Фиг. 16, зарядное устройство 362 может содержать один или несколько процессоров 366, одно или несколько блоков 368 памяти, и интерфейсы 370, 372 ввода-вывода. Через первый интерфейс 370 ввода-вывода зарядное устройство 362 может обмениваться информацией с блоком 299 питания (через интерфейс 352 ввода-вывода блока питания). Таким образом, например, хранимые в памяти 346 данные относительно блока 299 питания могут быть загружены из ведущей ЭВМ в запоминающее устройство 368 в зарядном устройстве 362. Таким образом, процессор 366 может оценивать идентификационные значения для съемных/заменяемых компонентов, загруженные из схемы 344 управления зарядкой, определять подлинность и пригодность компонентов. Рабочие параметры, загруженные из схемы 344 управления зарядкой, также могут сохраняться в памяти 368, и тогда могут затем загружаться на другое компьютерное устройство через второй интерфейс 372 ввода-вывода для оценки и анализа, например, посредством системы лечебного учреждения, в котором выполняется операция, включающей использование инструмента 10, посредством учреждения стороны хирурга, посредством агента по продажам инструмента, посредством изготовителя инструмента, и т.д.
Зарядное устройство 362 также может содержать измеритель 374 зарядов для измерения заряда по всем вторичным аккумуляторам 342. Измеритель 374 зарядов может находиться во взаимодействии с процессором(ами) 366, так что процессор(ы) 366 может в реальном масштабе времени определять пригодность для использования блока 299 питания, чтобы обеспечивать высокую эффективность.
В другом варианте осуществления, как показано на Фиг. 17, схема аккумуляторной батареи может содержать регулятор 320 мощности, чтобы регулировать мощность, подаваемую на двигатель 65 блоками 310 энергосбережения. Регулятор 320 мощности также может являться частью блока 299 питания, или он может быть отдельным компонентом. Как упомянуто выше, двигатель 65 может быть щеточным двигателем постоянного тока. Скорость щеточных двигателей постоянного тока обычно пропорциональна приложенному входному напряжению. Регулятор 320 мощности может поставлять высокой степени регулируемое выходное напряжение на двигатель 65, так что двигатель 65 будет работать с постоянной (или по существу постоянной) скоростью. Согласно различным вариантам осуществления, регулятор 320 мощности может содержать импульсный преобразователь мощности, такой как промежуточный вольтодобавочный преобразователь, как показано в примере Фиг. 17. Такой промежуточный вольтодобавочный преобразователь 320 может содержать переключатель 322 мощности, такой как FET, выпрямитель 320, дроссель 326, и конденсатор 328. Когда переключатель 322 мощности включен, источник входного напряжения (например, источники 310 питания) непосредственно соединяются с дросселем 326, который сохраняет энергию в этом состоянии. В этом состоянии конденсатор 328 подает мощность на выходную нагрузку (например, двигатель 65). Когда переключатель 320 мощности находится в выключенном состоянии, дроссель 326 является соединенным с выходной нагрузкой (например, двигателем 65) и конденсатором 328, так что энергия передается от дросселя 326 на конденсатор 328 и нагрузку 65. Схема 330 управления может управлять переключателем 322 мощности. Схема 330 управления может использовать контуры цифрового и/или аналогового регулирования. Кроме того, в других вариантах осуществления, схема 330 управления может принимать управляющую информацию от основного контроллера (не показано) через линию связи, такую как последовательная или параллельная шина цифровых данных. Заданное значение напряжения для выхода регулятора 320 мощности может быть установлено, например, на половину напряжения разомкнутой схемы, при которой является доступной максимальная мощность, доступная от источника.
В других вариантах осуществления могут использоваться различные топологии преобразователей мощности, включая линейные или импульсные преобразователи мощности. Другие топологии переключательного режима, которые могут использоваться, включают в себя обратный, прямой, вольтодобавочный, усиливающий и SEPIC. Заданное напряжение для регулятора 320 мощности может изменяться в зависимости от того, сколько элементов из батареи используются для приведения в действие двигателя 65. Дополнительно, регулятор 320 мощности может использоваться с вторичными аккумуляторными устройствами 342, показанными на Фиг. 13. Дополнительно, в регулятор 320 мощности может быть введен реверсивный переключатель 316, хотя он показан отдельно на Фиг. 17.
Аккумуляторные батареи обычно могут моделироваться в виде идеального источника напряжения и сопротивления источника питания. Для идеальной модели, когда сопротивление источника и нагрузки согласованы, на нагрузку передается максимальная мощность. На Фиг. 18 показана типичная кривая мощности для аккумуляторной батареи. Когда схема батареи разомкнута, напряжение на батарее является высоким (на ее значении при разомкнутой цепи) и текущий от батареи ток является нулевым. Поставляемая от батареи мощность также является нулевой. Если из батареи извлекается больше тока, напряжение на батарее уменьшается. Мощность, поставляемая посредством батареи, является произведением тока и напряжения. Мощность достигает своего пика приблизительно на уровне напряжения, которое меньше напряжения открытой схемы. Как показано на Фиг. 18, у большинства химических источников питания имеется резкое снижение напряжения/мощности при более высоком токе из-за химического состава или положительного температурного коэффициента (PTC), или из-за устройства защиты батареи.
Конкретно для вариантов осуществления, использующих аккумуляторную батарею (или батареи) для приведения в действие двигателя 65 в течение процедуры, схема 330 управления может отслеживать выходное напряжение и регулировать заданное значение регулятора 320, чтобы батарея работала на "левой" стороне или стороне возрастания кривой мощности. Если батарея достигает пикового уровня мощности, схема 330 управления может изменить (например, понизить) заданное значение регулятора, так что от батареи запрашивается меньшая величина полной мощности. Двигатель 65 затем будет замедлять движение. Таким образом, потребная мощность от блока питания будет редко, если когда-либо, превышать пиковую доступную мощностью, так что может избегаться ситуация нехватки мощности в течение процедуры.
Кроме того, согласно другим вариантам осуществления, получаемая от батареи мощность может быть оптимизирована таким образом, что химические реакции внутри элементов батареи будут иметь время для восстановления, чтобы таким образом оптимизировать ток и мощность, доступные от батареи. В импульсных нагрузках, батареи обычно обеспечивают большую величину мощности в начале импульса, чем к концу импульса. Это происходит вследствие нескольких факторов, включая: (1) PTC может быть изменяющим свою устойчивость в течение импульса; (2) температура батареи может меняться; и (3) скорость электрохимической реакции является меняющейся вследствие истощения электролита в катоде, и скорость диффузии свежего электролита ограничивает скорость реакции. Согласно различным вариантам осуществления, схема 330 управления может управлять преобразователем 320, так чтобы он получал от батареи более низкий ток, чтобы позволять батарее восстанавливаться прежде, чем она работает в импульсном режиме снова.
Согласно другим вариантам осуществления, инструмент 10 может содержать устройство ограничения крутящего момента муфтового типа. Устройство ограничения крутящего момента муфтового типа может помещаться, например, между двигателем 65 и конической шестерней 68, между конической шестерней 70 и узлом 72 планетарной шестерни, или на выходном валу узла 72 планетарной шестерни. Согласно различным вариантам осуществления, устройство ограничения крутящего момента может использовать электромагнитную муфту или муфту с постоянными магнитами.
На Фиг. 19-22 показан пример электромагнитной муфты 400, которая может использоваться в инструменте 10 согласно различным вариантам осуществления. Муфта 400 может содержать подковообразный статор 402, имеющий на каждом конце магнитные диски 404, 406. Первый диск 404 может быть соединен с имеющим возможности аксиального перемещения и вращения полюсным наконечником 408, таким как выходной полюс двигателя 65. Второй магнитный диск 406 может быть соединен с аксиально неподвижным, имеющим возможность вращения полюсным наконечником 410, таким как входной полюс в коробку передач инструмента 10. Принимая во внимание фигуры 19 и 20, первый полюсный наконечник 408 вытянут аксиально из второго полюсного наконечника 410 на зазор 412, так что магнитные диски 404, 406 не являются зацепленными. Может использоваться катушка проводов (не показана), которая может быть навита вокруг статора 402, чтобы создавать электромагнитный поток, необходимый для приведения в действие муфты 400. Когда катушка проводит электрический ток, результирующий магнитный поток может вызвать притяжение двух магнитных дисков 404, 406, обеспечивая, что первый полюсный наконечник 408 перемещается аксиально ко второму полюсному наконечнику 410, обеспечивая, тем самым заставляя, два магнитных диска 404, 406 войти в зацепление, как показано на Фиг. 21 и 22, так что два полюсных наконечника 408, 410 будут вращаться вместе, пока крутящий момент не превысит момент трения, произведенный между наружными поверхностями магнитных дисков 404 и 406.
Сила притяжения между двумя дисками 404, 406 и соответствующая несущая способность по крутящему моменту муфты 400 может контролироваться путем регулировки диаметров дисков 404, 406, коэффициента трения между контактирующими наружными поверхностями магнитных дисков 404 и 406, и путем использования для дисков 404, 406 магнитных материалов, которые насыщаются с известной и регулируемой плотностью потока. Следовательно, даже если было рабочее состояние, где больше тока прошло через катушку, магнитный материал дисков 404, 406 не будет создавать более большую силу притяжения и последующее ограничение крутящего момента.
Использование такой муфты имеет много дополнительных потенциальных преимуществ. Будучи электрически управляемой, муфта 400 может быть быстро выведена из работы путем снятия тока из провода, чтобы ограничить величину тепла, выделяемого внутри муфты 400 и внутри двигателя 65. Путем отсоединения двигателя от остальной части цепи привода, с помощью муфты 400, большая часть хранимой инерционной энергии в цепи привода будет разъединенной, ограничивая ударную волну при внезапной блокировке выхода. Кроме того, будучи регулируемой электрически, в конструкцию может быть заложено некоторое ограниченное скольжение, чтобы помочь уменьшению ударной волны при перезапуске цепи привода под нагрузкой. Дополнительно, поскольку для регулирования предельного значения крутящего момента могут использоваться характеристики магнитной насыщенности одного или нескольких компонентов (например, магнитных дисков 404, 406) внутри муфты вместо тока катушки, муфта 400 будет менее чувствительной к изменениям сетевого напряжения. Предельное значение крутящего момента в таких вариантах осуществления будет прежде всего функцией физических размеров компонентов муфты (например, магнитных дисков 404, 406) и не будет требовать для надлежащей работы регуляторов напряжения или других внешних компонентов.
В другом варианте осуществления вместо использования электромагнитной муфты, устройство ограничения крутящего момента может содержать постоянный магнит (не показано). Постоянный магнит может быть соединен, например, с первым, имеющим возможность аксиального перемещения полюсным наконечником 408, и притягивать аксиально неподвижный второй полюсный наконечник 410, или наоборот. В таких вариантах осуществления один из дисков 404, 406 может быть выполнен из постоянного магнита, а второй выполнен из магнитного материала, подобного железу. В виде небольшой разновидности, статор 402 может выполняться в форме постоянного магнита, обеспечивая, чтобы магнитные диски 404 и 406 притягивались друг к другу. Вследствие постоянного магнита, два диска 404, 406 будут всегда сцепленными. Использование постоянного магнита не будет обеспечивать такой же точный контроль по крутящему моменту, как описанная выше конфигурация электромагнитной муфты, но оно будет иметь преимущества: (1) не требуют средств управления или управляющей логики для регулирования тока через катушку; (2) являются более компактной конфигурацией, чем электромагнитная муфта; и (3) упрощают дизайн инструмента 10.
Как упомянуто предварительно, рабочий орган 12 может излучать ВЧ энергию, чтобы коагулировать ткань, зажатую в рабочем органе. ВЧ энергия может передаваться между электродами в рабочем органе 12. ВЧ источник (не показан), содержащий, например, генератор колебаний и усилитель, среди прочих компонентов, которые могут подавать ВЧ энергию на электрод, может располагаться в инструменте непосредственно, например, в рукоятке 6 для беспроводного инструмента 10, или ВЧ источник может быть внешним по отношению к инструменту 10. ВЧ источник может быть активирован, как описано дополнительно ниже.
Согласно различным вариантам осуществления, рабочий орган 12 может содержать несколько секций (или сегментов) электродов. Например, как показано в примере Фиг. 23, нижняя поверхность упора 24 (то есть, поверхность, обращенная к кассете 34 для скобок) может содержать три лежащих на одной прямой ВЧ сегмента. В этом примере, каждый сегмент имеет одинаковую длину (например, 20 мм), хотя в других вариантах осуществления может быть больше или меньше сегментов, и сегменты могут иметь различные длины. В примере по Фиг. 23, имеются три пары активных или "анодных" выводов или электродов 500, расположенных в линию продольно вдоль каждой стороны по длине канала на нижней поверхности упора 24. В частности, в проиллюстрированном варианте осуществления имеется пара дистальных электродов 5001, пара средних электродов 5002, и пара проксимальных электродов 5003 на каждой стороне канала 516 для ножа. Металлическая внешняя часть или канал 22 рабочего органа 12 или металлический упор 24 могут использоваться в качестве противоэлектрода (или катода) для каждого из трех верхних активных электродов (или анодов) 500. Верхние электроды 500 могут соединяться с ВЧ источником. При возбуждении ВЧ энергия может распространяться между верхними электродами 500 и противоэлектродом, обеспечивая коагуляцию ткани, зажатой между электродами.
Электроды 500 могут возбуждаться одновременно или с различной очередностью, например, последовательно. Для вариантов осуществления, где электроды 500 возбуждаются в соответствии с последовательностью, последовательность может быть автоматической (управляемой, например, посредством контроллера (не показан), находящегося во взаимодействии с ВЧ источником) или по выбору пользователя. Например, проксимальные электроды 5003 могут возбуждаться первыми; затем - средние электроды 5002; затем - дистальные электроды 5001. Таким образом, оператор (например, оперирующий хирург) может избирательно осуществлять коагуляцию областей скобочного шва. Электроды в таком варианте осуществления могут управляться посредством мультиплексора и/или генератора, как описано дополнительно ниже. Таким образом, ткань под каждым электродом 500 может обрабатываться индивидуально в соответствии с потребностями коагуляции. Каждый электрод в составе пары может соединяться с ВЧ источником с тем, чтобы они возбуждались одновременно. То есть, для дистальной пары активных электродов 5001, каждый, находящийся на противоположных сторонах канала для ножа, может возбуждаться посредством ВЧ источника одновременно. То же относится к средней паре электродов 5002 и проксимальной паре электродов 5003, хотя в варианте осуществления, где пары электродов возбуждаются последовательно, дистальная пара не возбуждается одновременно со средними и проксимальными парами, и так далее.
Дополнительно, различные электрические параметры, такие как полное сопротивление, поставляемая мощность или энергия, и т.д., могут контролироваться, и вывод на конкретные электроды 500 может модифицироваться, чтобы создавать наиболее желательное воздействие на ткань. Дополнительно, другое преимущество состоит в случае наличия оставшейся от предыдущего выстреливания инструмента или хирургической процедуры металлической скобки или другого электрически проводящего объекта, что может вызвать короткое замыкание электродов. Такая ситуация короткого замыкания может выявляться посредством генератора и/или мультиплексора, и энергия может модулироваться способом, подходящим для схемы короткого замыкания.
Кроме того, возбуждение электродов 500 последовательно уменьшает мгновенную мощность, требуемую от ВЧ источника по сравнению с конструктивным решением, которое имело бы один комплект электродов такой длины, как объединенная длина для трех сегментированных электродов 500, показанных на Фиг. 23. Например, для конфигураций электродов, как показано в 'патенте 312', было продемонстрировано, что потребуется от пятидесяти до ста ватт для успешной коагуляции сорока-пяти миллиметровых швов с обеих сторон линии разреза. Путем использования меньших активных электродов (например, верхних электродов 500), которые имеют величину площади поверхности меньше, чем более обратные электроды больших размеров (например, металлический упор 24), активные электроды 500 меньших размеров могут концентрировать терапевтическую энергию в ткани, тогда как более обратный электрод больших размеров используется для выполнения схемы с минимальным воздействием на область контакта с тканью. Кроме того, обратный электрод предпочтительно имеет более большую массу и таким образом способен оставаться более холодными в течение электрохирургического применения.
Электроды 500 могут окружены электроизоляционным материалом 504, который может содержать керамический материал.
На Фиг. 24 показан другой вариант осуществления исполнения с наличием сегментированных ВЧ электродов. В варианте осуществления, показанном на Фиг. 24, имеются четыре лежащих на одной прямой сегментированных электрода 5001-4 равной длины (15 мм в этом примере). Подобно исполнению по Фиг. 23, электроды 500 по Фиг. 24 могут возбуждаться одновременно или последовательно.
На Фиг. 25 показан еще один вариант осуществления, в котором сегментированные электроды имеют различные длины. В проиллюстрированном варианте осуществления, имеются четыре лежащих на одной прямой сегментированных электрода, но наиболее дистальном электроды 5001, 5002 имеют длину 10 мм, а два проксимальных электрода 5003, 5004 имеют длину 20 мм. Наличие коротких дистальных электродов может обеспечивать преимущество концентрации терапевтической энергии, как упомянуто выше.
На Фиг. 59 показано исполнение с наличием пятнадцати пар сегментированных высокочастотных электродов 500 на печатной плате 570, или другом типе подходящей подложки, на нижней поверхности упора 24 (то есть, поверхности, обращенной к каналу 22). Различные пары электродов возбуждаются посредством ВЧ источника (или генератора) 574. Мультиплексор 576 может распределять ВЧ энергию различным парам электродов, как требуется, под управлением контроллера 578. В соответствии с различными вариантами осуществления ВЧ источник 574, мультиплексор 576 и контроллер 578 могут размещаться в рукоятке 6 инструмента.
В таком исполнении печатная плата 570 может содержать несколько слоев, которые обеспечивают электрические соединения между мультиплексором 576 и различными парами электродов. Например, как показано на Фиг. 60-63, печатная плата может содержать три слоя 5801-3, каждый слой 580 обеспечивает соединения с пятью парами электродов. Например, верхний слой 5803 может обеспечивать соединения с наиболее проксимальными пятью парами электродов, как показано на Фиг. 60 и 61; средний слой 5802 может обеспечивать соединения со средними пятью парами электродов, как показано на Фиг. 60 и 62; и нижний слой 5801 может обеспечивать соединения с наиболее дистальными пятью парами электродов, как показано на Фиг. 60 и 63.
На Фиг. 64 показан вид в разрезе с конца упора 24 согласно такому варианту осуществления. Печатная плата 570, смежная с карманами 584 для скобок, содержит три проводящих слоя 5801-3, имеющих между собой изолирующие слои 5821-4. На Фиг. 65 и 66 показано, как различные слои 5801-3 могут располагаться друг над другом для соединения с мультиплексором 576 в рукоятке.
Преимущество наличия такого количества ВЧ электродов в рабочем органе 12, как показано на Фиг. 67, состоит в том, что в случае оставшихся от предыдущего выстреливания инструмента или хирургической процедуры в ткани 592 шва 590 металлических скобок или другого электрически проводящего объекта, который может вызвать короткое замыкание электродов, такая ситуация короткого замыкания может быть выявлена посредством генератора и мультиплексора, и энергия может модулироваться способом, подходящим для схемы короткого замыкания.
На Фиг. 27 показан другой рабочий орган 12 с ВЧ электродами. В этом варианте осуществления рабочий орган 12 содержит только дистальные электроды 5001, при этом металлический упор 24 используется в качестве обратного электрода. Дистальные электроды 5001 не охватывают полную длину упора 24, а только долю длины. В проиллюстрированном исполнении дистальные электроды 5001 имеют всего лишь приблизительно длину 20 мм вдоль 60-миллиметрового упора, так что дистальные электроды 5001 покрывают всего лишь приблизительно наиболее дистальную 1/3 длины упора. В других вариантах осуществления, дистальные электроды 5001 могут охватывать наиболее дистальную 1/10-1/2 долю длины упора. Такие варианты осуществления могут использоваться для точечной коагуляции, как описано в патенте США №5599350, который включен в документ путем ссылки.
На Фиг. 28 показан еще один вариант осуществления рабочего органа 12 с ВЧ электродами. В этом варианте осуществления активный электрод 500 установлен на дистальном кончике упора 24, изолирован посредством упора 24 электрически непроводящим изоляционным материалом 504, который может быть выполнен из керамического материала. Такое исполнение может использоваться для точечной коагуляции.
На Фиг. 29-32 иллюстрируются другие варианты осуществления рабочего органа 12, которые могут быть полезными для точечной коагуляции. В этих вариантах осуществления упор 24 содержит пару электродов 5001, 5002 на дистальном кончике упора 24 и вдоль боковой стороны упора 24. На Фиг. 29 показан фронтальный вид упора 24 согласно такому исполнению, на Фиг. 30 показан боковой вид, на Фиг. 31 показан увеличенный фрагментарный фронтальный вид, и на Фиг. 32 показан вид сверху. В таком варианте осуществления металлический упор 24 может действовать в качестве обратного электрода. Активные электроды 5001, 5002 могут быть изолированы от упора 24 электрически непроводящим изоляционным материалом(ами) 504, который может содержать керамический материал.
На Фиг. 33-36 показан вариант осуществления, где упор 24 содержит два дистальных электрода 5001, 5002, расположенных на верхушке в центре упора 24. Снова, металлический упор 24 может действовать в качестве обратного электрода, и активные электроды 5001, 5002 могут быть изолированы от упора 24 посредством электрически непроводящих изоляционных материалов 504.
На Фиг. 37-40 показан вариант осуществления, где один активный электрод 5001 (например, активный электрод) установлен на упоре 24, и другой активный электрод 5002 установлен на нижней губке 22, и предпочтительно на кассете 34. Металлический упор 24 может использоваться в качестве обратного электрода. Электрод 5001 упора изолирован от упора 24 посредством изоляционного материала 504. Электрод 5002, устанавливаемый в кассете 34, которая предпочтительно выполняется из непроводящего материала, такого как пластмасса, изолирован от металлического канала 22 кассетой 34.
На Фиг. 41-44 показан вариант осуществления, где упор 24 имеет два активных электрода 5001, 5002 на наиболее дистальном конце упора 24, которые проходят полностью от верхней поверхности упора 24 к нижней поверхности. Снова, металлический упор 24 может действовать в качестве обратного электрода, и активные электроды 5001, 5002 могут быть изолированы от упора 24 электрически непроводящим изоляционным материалом 504.
На Фиг. 45-48 показан вариант осуществления, где кассета 34 имеет два активных электрода 5001, 5002 на наиболее дистальном конце кассеты 34 для скобок. В таком варианте осуществления, металлический упор 24 или металлический канал 22 могут действовать в качестве обратного электрода. В этом проиллюстрированном варианте осуществления, электроды 5001, 5002 соединяются с изолирующей вставкой 503, но в других вариантах осуществления изолирующие вставки 503 могут опускаться, и пластмассовая кассета 34 может использоваться в качестве изоляционного материала для электродов 5001, 5002.
На Фиг. 49-52 показан вариант осуществления с наличием одного активного электрода 5001 на наиболее дистальном конце упора 24 и другого активного электрода 5002 на наиболее дистальном конце кассеты 34. Снова, в таком варианте осуществления, металлический упор 24 или металлический канал 22 могут действовать в качестве обратного электрода. В этом проиллюстрированном варианте осуществления электрод 5002 соединяется с изолирующими вставками 503, 505, но в других вариантах осуществления изолирующие вставки 503, 505 могут быть опущены, и пластмассовая кассета 34 может использоваться в качестве изоляционного материала для электрода 5002.
На Фиг. 57 показан боковой вид, и на Фиг. 58 показано боковое поперечное сечение рукоятки 6 согласно другим вариантам осуществления настоящего изобретения. Проиллюстрированное исполнение включает в состав только один спусковой механизм, смыкающий спусковой механизм 18. Приведение в действие ножа, ведущих элементов скобок и/или ВЧ электродов в этом варианте осуществления может выполняться с помощью средства, отличного от отдельного выстреливающего спускового механизма. Например, как показано на Фиг. 57, приведение в действие ножа, ведущих элементов скобок и/или ВЧ электродов могут быть активированы посредством кнопочного переключателя 540 или переключателя другого типа, который находится в положении, являющемся удобным для оператора. На Фиг. 57 переключатель 540 показан в наиболее проксимальной части рукоятки 6. В другом варианте осуществления переключатель может быть установлен около дистального конца рукоятки 6, так что втягивание насадка 539 активирует переключатель для приведения в действие инструмента. В таком варианте осуществления, переключатель (не показан) может быть помещен под насадкой 539 или около него, так что перемещение насадок переключает переключатель.
В качестве альтернативы, приведение в действие ножа, ведущих элементов скобок и/или ВЧ электродов может быть активировано посредством голоса или другими звуковыми командами, выявленными микрофоном 542. В других вариантах осуществления, рукоятка 6 может содержать ВЧ или акустический приемопередатчик 541, который может принимать и/или передавать ВЧ или акустические сигналы для приведения в действие инструмента. Также, как показано на Фиг. 58, для приведения в действие инструмента 10 могут использоваться ножная педаль или переключатель 544. Ножная педаль 544 может соединяться с рукояткой 6 посредством шнура 545. Также, рукоятка 6 может содержать дисковое средство управления 546 или некоторое другое подходящее управляющее устройство для управления активацией сегментированных ВЧ электродов (см., например, Фиг. 23 и 24). Используя такое управляющее устройство 546, оператор может последовательно активировать различные пары ВЧ электродов 500 в рабочем органе 12.
Показанный на Фиг. 57 и 58 инструмент 10 также включает в себя многие системы обратной связи для пользователя. Как упомянуто выше, инструмент 10 может содержать динамик 543 для произнесения вслух команд или инструкций оператору. Кроме того, рукоятка 6 может содержать визуальные индикаторы 548, такие как светоизлучающие диоды или другие источники света, которые обеспечивают визуальную обратную связь относительно приведения в действие различных сегментированных ВЧ электродов. Например, каждый из визуальных индикаторов 548 может соответствовать одной паре из пар сегментированных ВЧ электродов. Соответствующий визуальный индикатор 548 может активироваться, когда активирована сегментированная пара ВЧ электродов. Кроме того, рукоятка 6 может содержать алфавитно-цифровой индикатор 550, которым может быть СИД или ЖК индикатор, например. Индикатор 550 может соединяться с печатной платой 552 внутри рукоятки 6. Рукоятка 6 может также содержать вибратор 554 в части 26 пистолетной ручки, который может обеспечивать оператору обратную связь в виде вибрации. Например, вибратор 554 мог вибрировать каждый раз, когда активируется одна из сегментированных пар ВЧ электродов в рабочем органе 12.
На Фиг. 26 показан вид в разрезе рабочего органа 12 согласно различным вариантам осуществления, где электроды находятся на верхнем зажимном элементе (или упоре) 24. В проиллюстрированном варианте осуществления, активные электроды 500 установлены смежными с пазом ножа 516. Металлический упор 24 может использоваться в качестве обратного электрода. Изоляторы 504, которые могут быть выполнены из керамики, изолируют электроды 500 от металлического упора 24. Вариант осуществления по Фиг. 68 подобен таковому по Фиг. 26, за исключением того, что электроды 500 выполняются более малыми, так что часть изоляторов 504 может проходить между соответствующими электродами 500 и краями канала 516 для ножа.
На Фиг. 53 показан вид в поперечном разрезе конца рабочего органа 12 согласно другому варианту осуществления. В этом варианте осуществления, подобно варианту осуществления Фиг. 26, активные электроды 5001, 5002 находятся на упоре 24 на противоположных сторонах канала для ножа. Электроды 5001, 5002 изолированы от металлического упора посредством изоляторов 504, которые снова предпочтительно содержат керамический материал. В этом варианте осуществления, однако, изоляторы 504 выполнены очень тонкими (сравните с Фиг. 26). Выполнение изоляторов 504 очень тонким обеспечивает потенциальное преимущество, что упор 24 может включать в себя относительно большую металлическую секцию 520 над электродами 500, таким образом потенциально обеспечивая более тонкий профиль упора для данной жёсткости упора, или более жесткий профиль для данного размера поперечного сечения упора. Изоляторы 504 могут быть литыми в упор 24 или в вакууме напыленными на нее.
На Фиг. 54 иллюстрируется другой вариант осуществления. В этом варианте осуществления, активные электроды 5001, 5002 напыляются в вакууме или покрываются со связующими на изоляторы 504, которые также могут напыляться в вакууме или покрываться со связующими на упор 24. Подобно варианту осуществления по Фиг. 53, это конструктивное решение допускает большую величину материала упора над электродами. В таком варианте осуществления электроды 5001, 5002 могут содержать серебро, которое является хорошим проводником электричества и имеет антимикробные свойства.
На фигуре 55 показан боковой вид рабочего органа согласно другому варианту осуществления. В этом варианте осуществления, тонкая пленка электрически изолирующего материала 530 осаждается на лицевой поверхности кассеты 34. Изолирующая пленка 530 предпочтительно содержит жаростойкий и дугостойкий материал, такой как керамический. Это будет вести к увеличению сопротивления кассеты 34 по отношению к ведению дуги и короткому замыканию, допуская большее запусков между сменами кассеты 34. Кроме того, если кассета 34 является плохим электрическим проводником, это будет содействовать более быстрому нагреву ткани и снижению требований к полной энергии. Активные электроды (не показано на Фиг. 55) могут находиться в упоре 24, как описано в вариантах осуществления выше.
На фигуре 56 показан вариант осуществления, который является подобным показанному на Фиг. 55, за исключением того, что на Фиг. 56 тонкий слой 532 слабо электрически проводящего материала осаждается на верхней части изолирующей пленки 530. Проводимость тонкого, слабо проводящего слоя 532 может быть более низкой, чем проводимость ткани, зажатой в рабочем органе 12 для обработки. По существу, тонкий слабо проводящий слой 532 будет обеспечивать тракт уменьшенной проводимости для обеспечения дополнительного нагрева зажатой ткани. Это будет вести к уменьшению времени, требуемого для нагрева ткани и достижения коагуляции.
Как описано выше, инструмент 10 может содержать шарнир 14 сочленения для осуществления шарнирного движения рабочего органа 12. Врач или оператор инструмента 10 могут устанавливать положение рабочего органа 12 относительно вала 8 путем использования средства 16 управления поворотом, как описано более подробно в опубликованной заявке на патент США, номер публикации №2007/0158385 A1, озаглавленный "Surgical Instrument Having An Articulating End Effector" (Хирургический инструмент с наличием шарнирно-сочлененного рабочего органа), поданной Geoffrey C. Hueil и др., которая включена в документ путем ссылки. В другом варианте осуществления, предпочтительнее устройства управления, интегрированного с инструментом 10, положение рабочего органа 12 может устанавливаться посредством отдельного инструмента, такого как захватное устройство, которое вводится в пациента так, чтобы его рабочая часть находилась около рабочего органа 12, так что положение рабочего органа 12 регулируется, как требуется. Отдельный инструмент может вводиться через отверстие, отличное от (отверстия для) рабочего органа 12, или через то же отверстие. Также, различные операторы могут действовать отдельными инструментами, или один человек может действовать обоими инструментами, чтобы установить положение рабочего органа 12. В другом сценарии пассивной установки положения, шарнирное положение рабочего органа 12 можно устанавливать путем тщательного проталкивания относительно остальных частей пациента, чтобы достигать требуемого шарнирного положения.
В другом варианте осуществления, рабочий орган 12 может быть соединен с рукояткой посредством гибкого кабеля. В таком варианте осуществления рабочий орган 12 может позиционироваться как требуется, и удерживаться в позиции при помощи другого инструмента, например, отдельного захватного инструмента. Кроме того, в других вариантах осуществления, рабочий орган 12 может позиционироваться посредством отдельного инструмента и зажиматься посредством второго отдельного инструмента. Кроме того, рабочий орган 12 может быть выполнен достаточно малым, таким как 8-9 мм шириной и 10-11 мм высотой, так что может использоваться механизм «втянуть, чтобы сомкнуть», чтобы зажимать рабочий орган от рукоятки 6. Механизм «втянуть, чтобы сомкнуть» может быть взят из описанного в патенте США №5562701, озаглавленном "Cable-Actuated Jaw Assembly For Surgical Instruments", который включен в документ путем ссылки. Кабель 600 может располагаться либо в гибком эндоскопе, либо вдоль него, для использования, например, в процедурах для верхнего или нижнего отделов желудочно-кишечного тракта.
В еще одном варианте осуществления, как показано на Фиг. 69 и 70, инструмент 10 может содержать узел 732 гибкой шейки, дающий возможность поворот рабочего органа 12. Когда узел 731 артикуляционной передачи, соединенный с валом 8, вращается, он может обеспечивать удаленный поворот узла 732 гибкой шейки. Узел 732 гибкой шейки может содержать первую и вторую части 733, 734 гибкой шейки, которые вмещают первый и второй узлы 735, 736 гибких лент. При вращении узла 731 передачи поворота, один узел из первого и второго узлов 735, 736 гибких лент передачи перемещается в прямом направлении, а другой узел лент перемещается в обратном направлении. В ответ на возвратно-поступательное перемещение узлов лент внутри первой и второй частей 733, 734 гибкой шейки узла 732 гибкой шейки, узел 732 гибкой шейки сгибается, чтобы обеспечить поворот. Дополнительное описание гибкой шейки представлено в патенте США №5704534, который включен в документ путем ссылки.
Устройства, раскрытые в документе, могут разрабатываться подлежащими удалению после единственного использования, или они могут разрабатываться подлежащими использованию многократно. В любом случае, однако, устройство может быть восстановлено для повторного использования после, по меньшей мере, одного использования. Восстановление может включать в себя любую комбинацию этапов из разборки устройства, за которой следует, чистка или замена конкретных деталей, и последующей повторной сборки. В частности, устройство может быть разобрано, и любое число конкретных деталей или частей устройства могут быть избирательно заменены или удалены в любой комбинации. После чистки и/или замены конкретных деталей устройство может быть повторно собрано для последующего использования либо в средстве восстановления, либо персоналом операционного блока непосредственно перед хирургической операцией. Специалисты в данной области техники оценят, что восстановление устройства может использовать разнообразие способов разборки, чистки/замены, и повторной сборки. Использование таких способов, и результирующее восстановленное устройства все находятся в рамках объема настоящей заявки.
Предпочтительно, различные исполнения описанного в документе изобретения будут обрабатываться прежде операции. Сначала, получают новый или использованный инструмент и очищают в случае необходимости. Затем инструмент может быть стерилизован. В одном способе стерилизации инструмент помещают в замкнутый и герметичный контейнер, такой как термоформованная пластмассовая оболочка, покрытая листом TYVEK. Контейнер и инструмент затем помещают в поле проникающей через контейнер радиации, такой как гамма-излучение, рентгеновские лучи, или электроны высокой энергии. Радиация уничтожает бактерии на инструменте и в контейнере. Стерилизованный инструмент затем может сохраняться в стерильном контейнере. Герметичный контейнер сохраняет инструмент стерильным до открытия в медицинском средстве.
Предпочтительно, чтобы устройство было стерилизованным. Это может выполняться любым из многих способов, известных специалистам в данной области техники, включая способы обработки бета-излучением или гамма-излучением, этиленоксидом, паром и другие способы.
Хотя настоящее изобретение было проиллюстрировано путем описания нескольких вариантов осуществления и хотя иллюстративные варианты осуществления были описаны со значительными подробностями, намерением заявителя не является определение границ, или ограничение каким-либо образом объема прилагаемой формулы изобретения такими подробностями. Дополнительные преимущества и модификации могут быть легко очевидны специалистам в данной области. Различные варианты осуществления настоящего изобретения представляют обширные усовершенствования над предшествующими способами сшивания скобками, которые требуют использования различных размеров скобок в одной кассете для достижения скобок, которые имеют различную сформированную (конечную) высоту.
Соответственно, настоящее изобретение обсуждалось в терминах эндоскопических процедур и устройства. Однако, использование в документе терминов, таких как "эндоскопический" не должно рассматриваться ограничивающим настоящее изобретение хирургическим сшивающим и режущим инструментом для использования только вместе с эндоскопической трубкой (то есть, троакаром). Напротив, полагается, что настоящее изобретение может находить использование в любой процедуре, где доступ является ограниченным, включая, но без ограничений лапароскопическими процедурами, а также открытыми процедурами. Кроме того, аспекты уникальности и новизны различных вариантов осуществления кассет для скобок по настоящему изобретению могут находить полезность при использовании в связи с другими формами сшивающих устройств без выхода за рамки сущности и объема настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОТОРИЗОВАННЫЙ ХИРУРГИЧЕСКИЙ РЕЖУЩИЙ И КРЕПЕЖНЫЙ ИНСТРУМЕНТ | 2009 |
|
RU2496436C2 |
| ХИРУРГИЧЕСКИЙ РЕЖУЩИЙ И КРЕПЕЖНЫЙ ИНСТРУМЕНТ, ИМЕЮЩИЙ РАДИОЧАСТОТНЫЕ ЭЛЕКТРОДЫ | 2009 |
|
RU2493788C2 |
| МОТОРИЗОВАННЫЙ РЕЖУЩИЙ И КРЕПЕЖНЫЙ ИНСТРУМЕНТ, ИМЕЮЩИЙ СХЕМУ УПРАВЛЕНИЯ ДЛЯ ОПТИМИЗАЦИИ ИСПОЛЬЗОВАНИЯ БАТАРЕИ | 2009 |
|
RU2496433C2 |
| МОТОРИЗОВАННЫЙ РЕЖУЩИЙ И КРЕПЕЖНЫЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, ИМЕЮЩИЙ ИСТОЧНИК ПИТАНИЯ НА ОСНОВЕ РУКОЯТКИ | 2009 |
|
RU2496432C2 |
| ХИРУРГИЧЕСКИЙ РЕЖУЩИЙ ИНСТРУМЕНТ С ПРИВОДОМ ОТ ЭЛЕКТРОДВИГАТЕЛЯ | 2009 |
|
RU2534520C2 |
| МОТОРИЗОВАННЫЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 2009 |
|
RU2532300C2 |
| ВЫБОРКА ДАННЫХ, СОХРАНЯЕМЫХ В ПАМЯТИ ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА | 2009 |
|
RU2533842C2 |
| МЕХАНИЗМЫ РЕГУЛИРОВКИ МОЩНОСТИ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ И АККУМУЛЯТОРОВ | 2011 |
|
RU2573584C2 |
| ХИРУРГИЧЕСКИЕ ИНСТРУМЕНТЫ И БАТАРЕИ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ | 2011 |
|
RU2569712C2 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ С ЭЛЕКТРОПРИВОДОМ | 2014 |
|
RU2653808C2 |


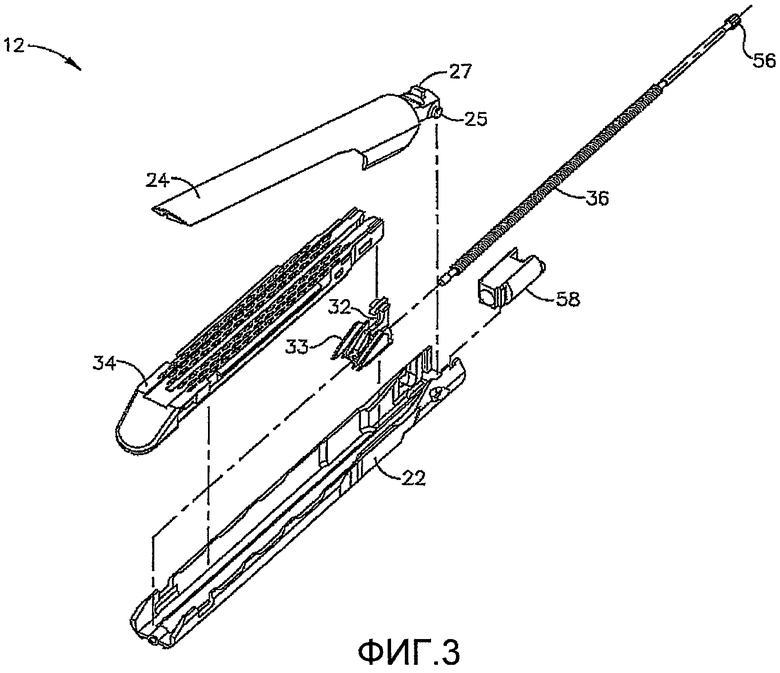
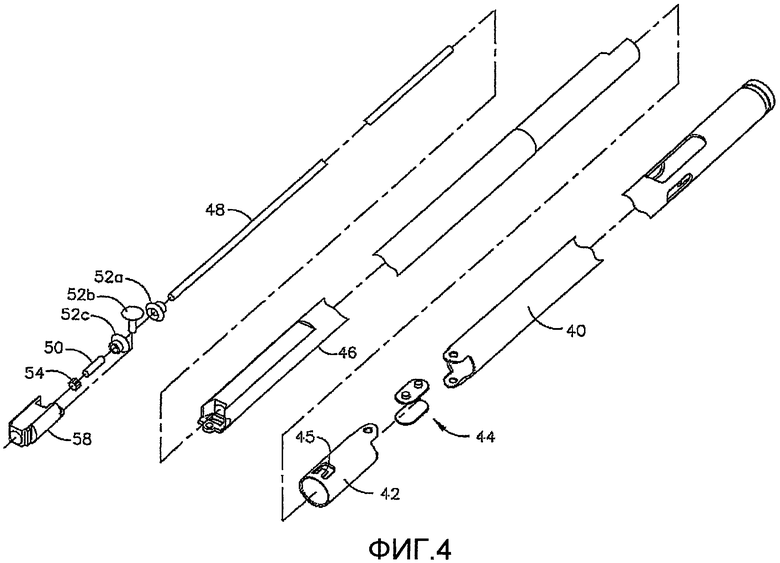
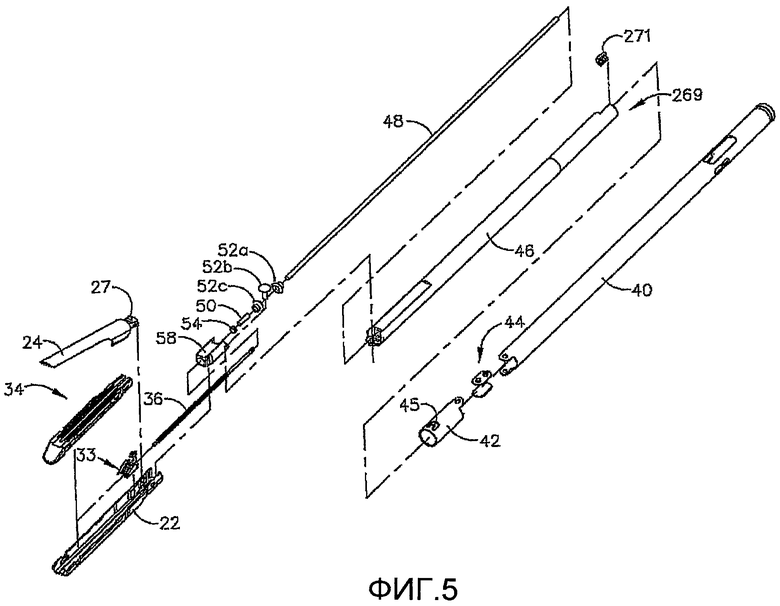
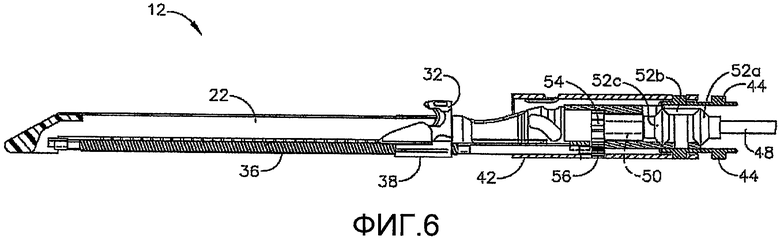








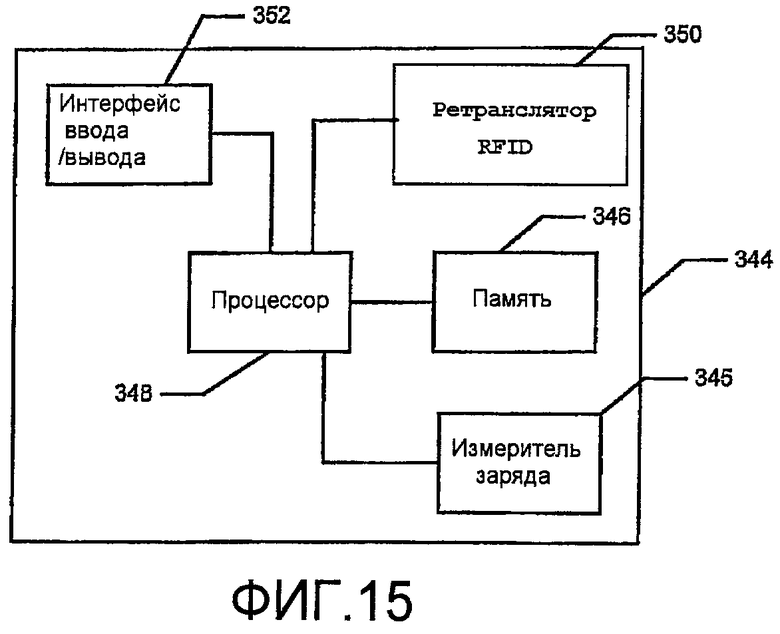









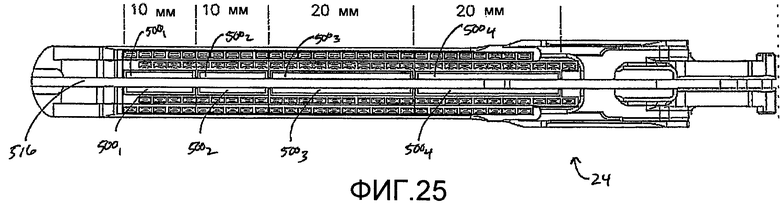





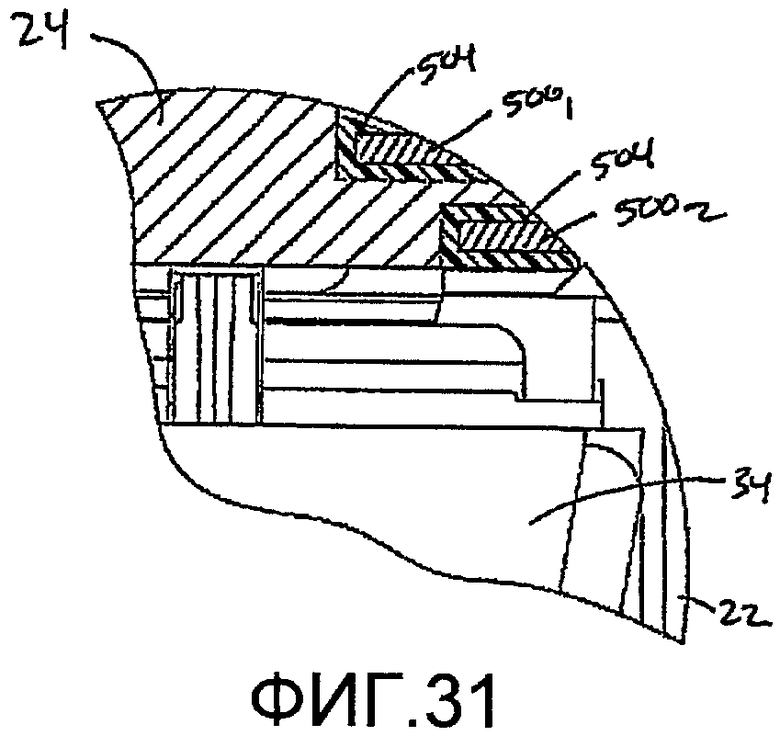




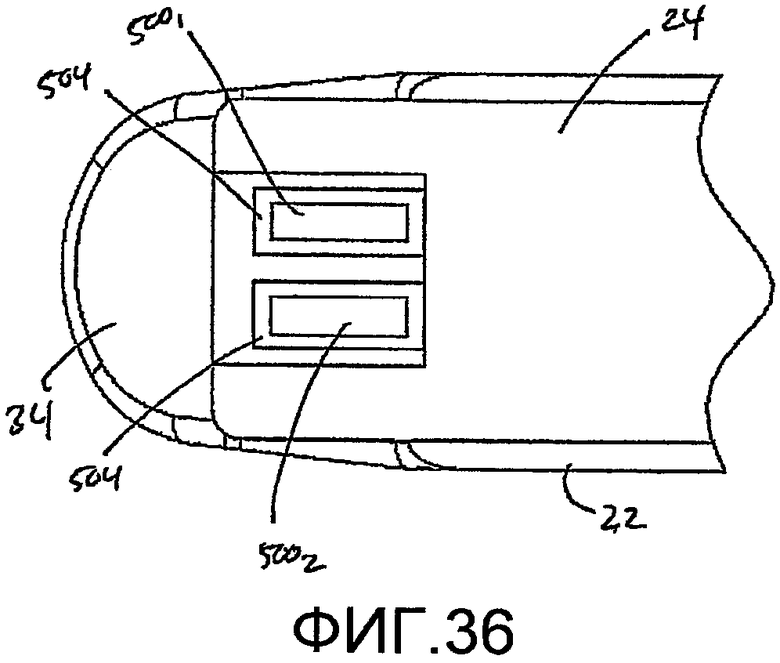








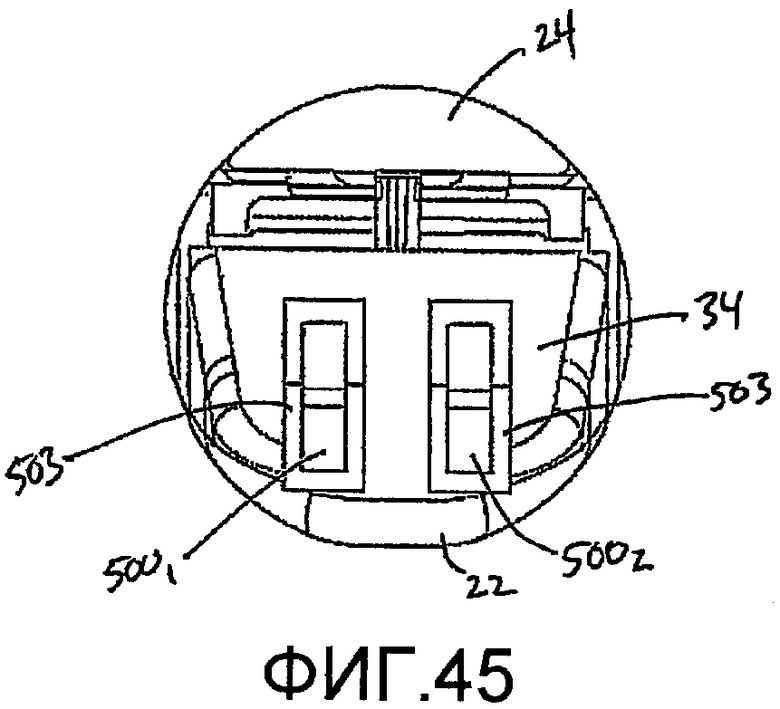




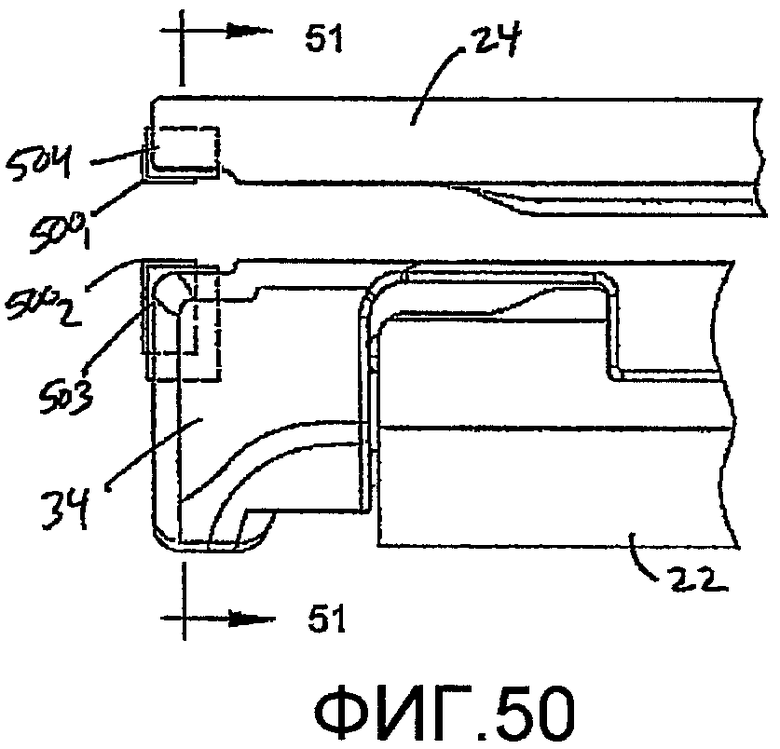

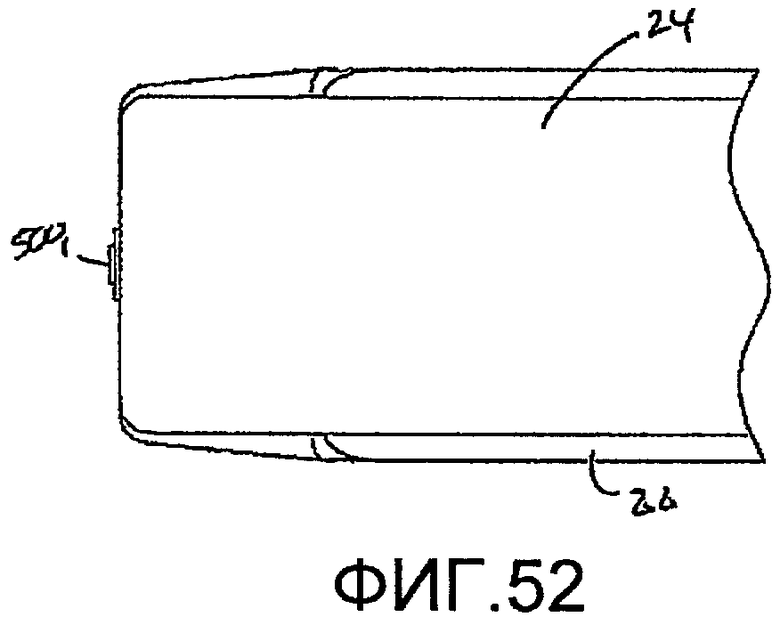


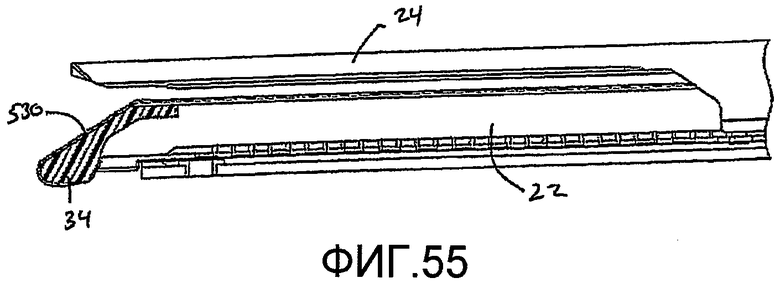















Изобретение относится к медицине. Хирургический режущий и скрепляющий инструмент содержит электрический двигатель постоянного тока, рабочий орган и вал, который соединен с рабочим органом. Вал содержит цепь привода для приведения в действие рабочего органа. Электрический двигатель соединен с цепью привода, для приведения в действие цепи привода. Между выходным полюсом двигателя и входным полюсом цепи привода установлено устройство ограничения крутящего момента. 12 з.п. ф-лы, 70 ил.
1. Хирургический режущий и скрепляющий инструмент, содержащий
рабочий орган;
вал, соединенный с рабочим органом, причем вал содержит цепь привода для приведения в действие рабочего органа;
электрический двигатель постоянного тока, соединенный с цепью привода для приведения в действие цепи привода; и
магнитную муфту, установленную между выходным полюсом двигателя и входным полюсом цепи привода и содержащую первый диск, соединенный с выходным полюсом двигателя, и второй диск, соединенный с входным полюсом цепи привода, причем первый и второй диски выполнены с возможностью магнитным образом притягиваться друг к другу, входя в контакт, тем самым вызывая совместное вращение двух полюсов, пока крутящий момент не превысит момент трения, генерируемый между наружными поверхностями магнитных дисков.
2. Хирургический режущий и скрепляющий инструмент по п.1, дополнительно содержащий рукоятку, соединенную с валом, при этом двигатель размещается в рукоятке.
3. Хирургический режущий и скрепляющий инструмент по п.3, в котором магнитная муфта является электромагнитной муфтой.
4. Хирургический режущий и скрепляющий инструмент по п.3, в котором электромагнитная муфта содержит
подковообразный статор, имеющий первый диск на первом конце
статора и второй диск на втором конце статора; и
катушку, такую, что когда катушка проводит ток, электромагнитный поток от катушки приводит в действие магнитную муфту.
5. Хирургический режущий и скрепляющий инструмент по п.4, в котором,
если катушка проводит ток, то два диска притягиваются друг к другу, так что они входят в контакт, и, если катушка не проводит ток, то два диска не находятся в контакте.
6. Хирургический режущий и скрепляющий инструмент по п.5, в котором катушка навита на статор.
7. Хирургический режущий и скрепляющий инструмент по п.1, в котором магнитная муфта содержит постоянный магнит.
8. Хирургический режущий и скрепляющий инструмент по п.7, в котором магнитная муфта содержит подковообразный статор, имеющий первый диск на первом конце статора и второй диск на втором конце статора, причем постоянный магнит соединяется с выходным полюсом двигателя и притягивает входной полюс цепи привода, так что диски находятся в контакте.
9. Хирургический режущий и скрепляющий инструмент по п.1, в котором рабочий орган содержит верхнюю и нижнюю противолежащие губки и нож для перемещения вдоль продольного канала нижней губки.
10. Хирургический режущий и скрепляющий инструмент по п.9, в котором рабочий орган дополнительно содержит, по меньшей мере, один ВЧ-электрод.
11. Хирургический режущий и скрепляющий инструмент по п.1, в котором магнитная муфта содержит постоянный магнит, подковообразный статор, имеющий первый диск на первом конце статора и второй диск на втором конце статора.
12. Хирургический режущий и скрепляющий инструмент по п.1, в котором инструментом является линейное эндоскопическое режущее устройство.
13. Хирургический режущий и скрепляющий инструмент по п.1, в котором инструментом является циркулярное режущее и сшивающее скобками устройство.
| Расходомер | 1991 |
|
SU1813201A3 |
| Сигнализатор уровня | 1991 |
|
SU1813202A3 |
| EP 1785102 A2, 16.05.2007 | |||
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| Хирургический аппарат для наложения компрессионных швов | 1979 |
|
SU1022703A1 |
| Генератор импульсов | 1988 |
|
SU1621141A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| ХИРУРГИЧЕСКИЙ СТЕПЛЕР ДЛЯ НАЛОЖЕНИЯ ЦИЛИНДРИЧЕСКОЙ СПИРАЛЕВИДНОЙ СКОБКИ | 2003 |
|
RU2244516C1 |
| DE 3212828 A1, 18.11.1982. | |||

