Изобретение относится к способам определения угловой скорости с использованием гироскопических эффектов с помощью приборов, выполняющих измерения с помощью механических средств, и может применяться при позиционировании угла спусков ножей при их заточке в специализированных заточных станках.
Из уровня техники известен способ позиционирования угла заточки, осуществляемый с помощью станка для заточки ножей (RU2696627C2, МПК B24B 3/36, опубл. 05.08.2019). Способ включает в себя установку затачиваемого ножа в держатель станка для заточки режущих кромок ножей, содержащий рабочий стол, и перемещение ножа и заточного диска относительно друг друга. Далее осуществляют позиционирование угла заточки на основании контроля положения режущей кромки затачиваемого ножа относительно заточного диска в зоне, позволяющей исключить непроизвольное касание заточного диска затачиваемым ножом при вращающемся заточном диске, при этом контроль положения режущей кромки осуществляют путем определения нулевой зоны режущей части периферии заточного диска, в которой касательная резания направлена перпендикулярно плоскости рабочего стола станка, при этом в зависимости от угла между затачиваемым ножом и касательной резания, исходящей из упомянутой нулевой зоны, определяют положение режущей кромки затачиваемого ножа относительно режущей части периферии заточного диска.
Недостатком известного технического решения является то, что известный станок для заточки ножей разработан, преимущественно, для заточки ножей ледорубов с прямым лезвием, что делает сложным его адаптацию для заточки лезвий, имеющих лезвия более сложной формы.
Наиболее близким техническим решением к заявленному изобретению и выбранным в качестве прототипа признан способ применения устройства для измерения углов (RU146949U1, МПК G01C 9/00, опубл. 20.10.2014). Способ включает в себя измерение сигналов напряжений по оси X и Y с помощью блока микромеханических акселерометров, которые поступают на входы операционных усилителей, а через их выходы поступают на входы микроконтроллера, где вычисляют углы наклона устройства относительно горизонта.
Недостатком известного способа измерения углов является сложность его адаптации для использования совместно со специализированными заточными станками. Кроме того, в составе устройства, применяемого для осуществления способа, отсутствует модуль индикации углов наклона, что затрудняет осуществления способа при эксплуатации прибора в бытовых условиях.
Технической задачей, на решение которой направлено заявленное изобретение, является повышение точности измерения угла заточки подводов ножей.
Указанная задача решена тем, что способ определения угла заточки ножей с помощью инклинометра включает в себя предварительную установку абразивного бруска в фиксаторы, установленные на держателе абразива заточного станка, при этом инклинометр закрепляют на фиксаторе абразивного бруска, установленном на конце держателя абразива противоположном концу держателя, устанавливаемому в шарнирный узел заточного станка, далее устанавливают в держатели станка нож, и при заточке лезвия c помощью инклинометра измеряют и контролируют угол наклона абразива по отношению к подводу ножа на пяте клинка, в середине лезвия клинка и на его острие.
Для осуществления способа может быть применен электронный инклинометр, снабженным блоком управления с подключенным к нему мультисенсорным датчиком измерения движения, модулем индикации и блоком ввода данных, при этом блок управления целесообразно выполнить на основе микропроцессорной системы.
Положительным техническим результатом, обеспечиваемым раскрытой выше совокупностью признаков способа, является повышение точности определения угла заточки подводов ножей, за счет применения в способе инклинометра и закрепления его на фиксаторе абразивного бруска, установленном на конце держателя абразива противоположном концу держателя, устанавливаемому в шарнирный узел заточного станка, что делает возможным точно определять угол заточки спусков ножей, имеющих лезвия, преимущественно, сложной формы.
Изобретение поясняется чертежами, где на фиг. 1 показан инклинометр вид спереди; на фиг. 2 показан вид инклинометр в изометрической проекции с указанием базовых поверхностей; на фиг. 3 представлена структурная схема электронного инклинометра для осуществления способа; на фиг. 4 представлен внешний вид заточного станка для осуществления предложенного способа; на фиг. 5 представлена схема заточки ножа с измерением угла заточки по предложенному способу.
Инклинометр для осуществления способа может иметь конструкцию, описанную ниже.
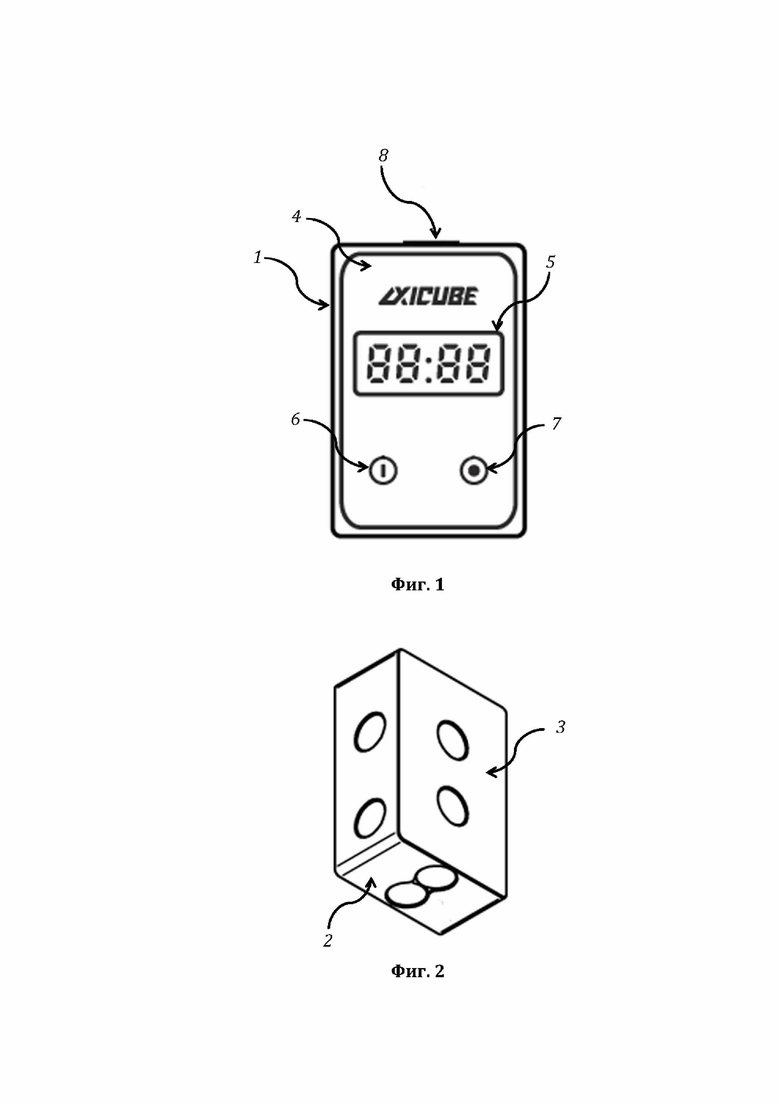
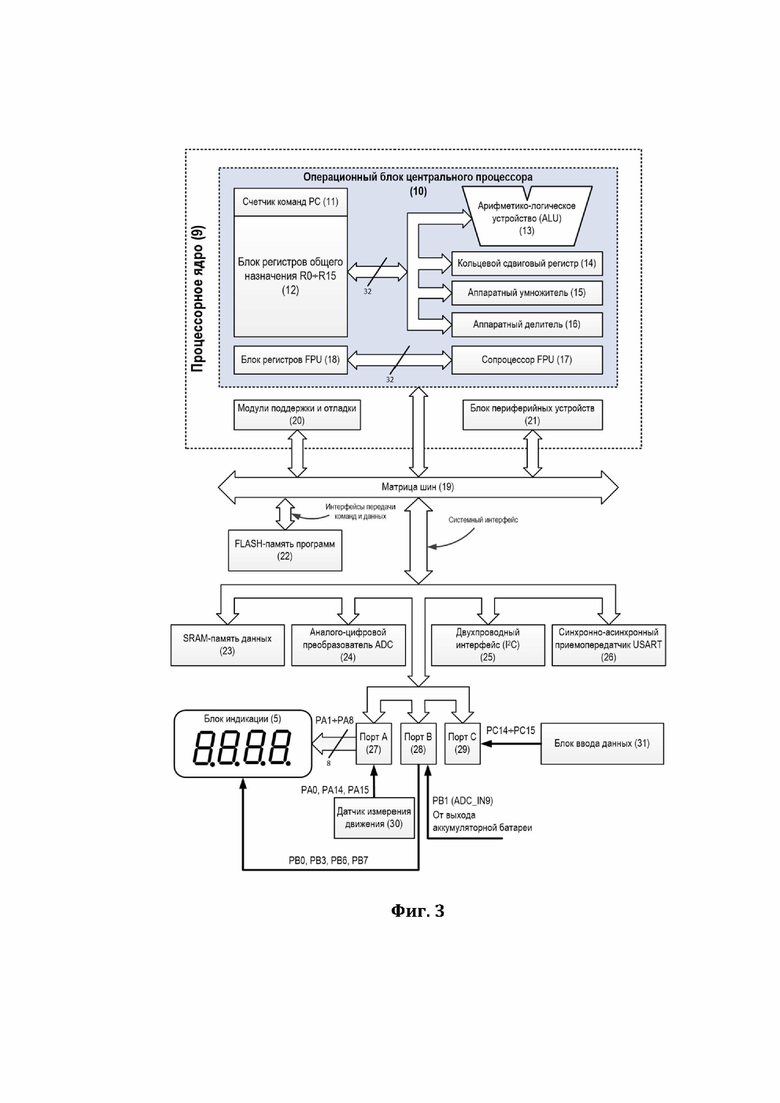
Инклинометр состоит из призматического корпуса 1, содержащего две взаимно перпендикулярных базовых поверхности (A, B) 2, 3, при этом на наружной торцевой поверхности 4 корпуса 1 закреплен модуль индикации 5, выполненный в виде четырех семисегментных индикаторов и блок ввода данных, состоящий из двух кнопок 6 и 7, первая из которых выполняет функцию включения устройства, а вторая – функцию обнуления данных; на верхней боковой поверхности инклинометра закреплен USB-разъем 8, а внутри корпуса 1 инклинометра размещен блок управления с питанием от аккумуляторной батареи, выполненный на основе микропроцессорной системы.
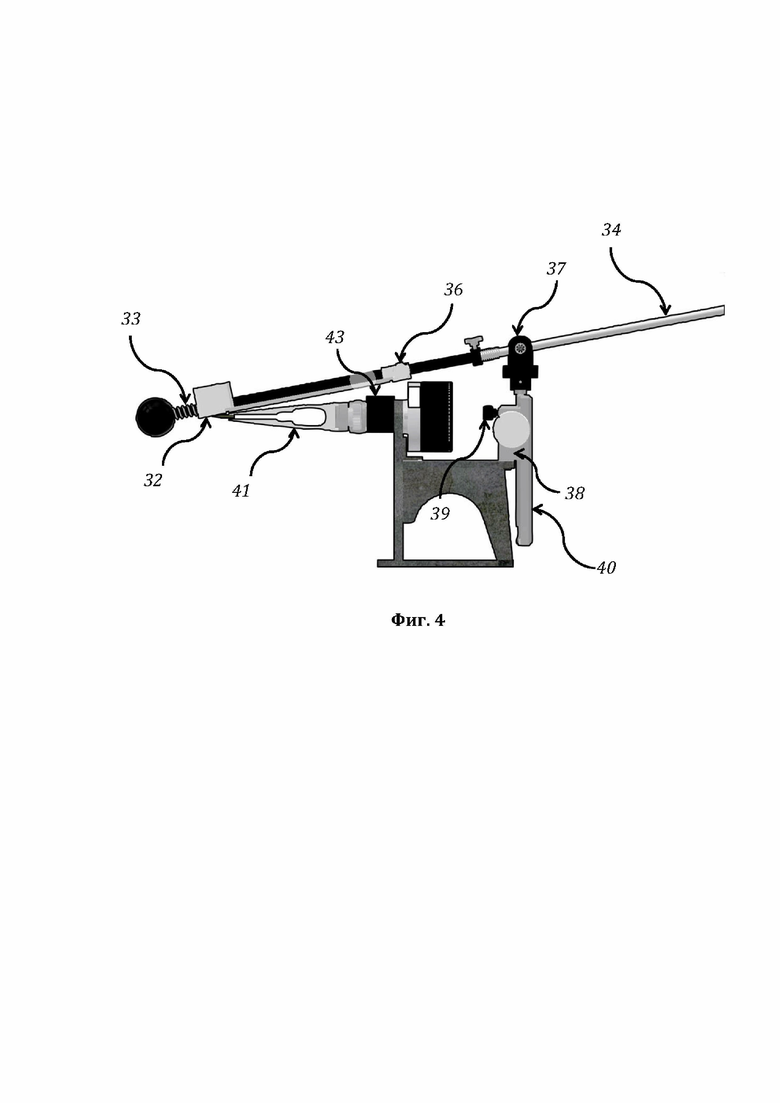
Основой микропроцессорной системы блока управления инклинометром является микроконтроллер, содержащий процессорное ядро 9, включающее в себя операционный блок 10 центрального процессора, состоящий из счетчика команд 11, блока регистров общего назначения 12, соединенного внутренней шиной с арифметико-логическим устройством 13, выполняющим арифметические и логические команды, кольцевым сдвиговым регистром 14 и аппаратными умножителем 15 и делителем 16 тридцатидвухразрядных чисел. Операционный блок центрального процессора может дополнительно содержать сопроцессор 17 для обработки чисел с плавающей точкой, с подключенными к нему блоком регистров 18, каждый из которых может являться источником и приемником данных, представленных в формате чисел с плавающей точкой одинарной или двойной точности.
Операционный блок 10 центрального процессора подключен к матрице шин 19, которая соединена со встроенными в микроконтроллер модулями поддержки и отладки 20, включающими, в том числе, порт трассировки и модуль точек останова во FLASH-памяти программ, и блоком периферийных устройств 21, включающим в себя контроллер прерываний, контроллер выхода из режима малого потребления и системный таймер; через интерфейсы передачи команд и данных к матрице шин подключена FLASH-память программ 22 микроконтроллера, а через системный интерфейс подключены внутренняя SRAM-память данных 23 микроконтроллера, регистры встроенных периферийных устройств, к которым относятся, в частности, аналого-цифровой преобразователь (ADC) 24, двухпроводный интерфейс (I2C) 25, синхронно-асинхронный приемопередатчик (USART) 26, внешняя память данных и регистры внешних периферийных устройств. При этом под матрицей шин понимается шинный мультиплексор, позволяющий коммутировать шины управления, адреса и данных, предназначенные для выполнения специализированных операций (например, команд обращения к памяти, контроллеру прерываний или к модулям поддержки и отладки), и согласовывать протоколы обмена данных по ним между различными устройствами процессорного ядра.
Дополнительно к матрице шин через системный интерфейс подключены регистры внешних периферийных устройств, которые представляют собой интерфейс ввода-вывода общего назначения, сгруппированного в универсальные двунаправленные GPIO-порты ввода-вывода 27, 28 и 29. К первому GPIO-порту ввода-вывода (порт A) подключены информационные входы модуля индикации 5 инклинометра и мультисенсорный датчик измерения движения 30, ко второму GPIO-порту ввода-вывода (порт B) подключены управляющие входы модуля индикации 5, а к третьему GPIO-порту ввода-вывода (порт C) подключен блок ввода данных 31 устройства.
Инклинометр может быть выполнен на основе дискретной логики или одного из известных восьми- или тридцатидвухразрядного микроконтроллера, например одной из микросхем семейств AVR, STM8 или STM32. Ниже приведен один вариантов исполнения инклинометра на основе микросхемы серии STM32L031x6, построенной на 32-битном процессорном ядре ARM Cortex-M0.
Модуль индикации 30 устройства выполнен в виде четырех семисегментных индикаторов, блок ввода данных 31 выполнен в виде двух кнопок 6 и 7, в качестве мультисенсорного датчика измерения движения 30 применена микросхема серии LSM6DS3 (Серия акселерометров LSM6DS3 // Компел. URL: https://www.compel.ru/series/ST/LSM6DS3 (дата обращения: 10.05.2021)), а в качестве аккумуляторной батареи применен литий-ионный заряжаемый аккумулятор BQ21040DBVT (Datasheet Texas Instruments BQ21040DBVT // FindChips. URL: https://www.rlocman.ru/datasheet/ data.html?di=239021&/BQ21040DBVT (дата обращения: 10.05.2021)).
Линии PA1÷PA8 первого GPIO-порта A подключены к информационным входам (сегментам A, B, C, D, E, F, G, H) индикаторов модуля индикации 5, к линии PA9 порта A подключен выход SCL микросхемы мультисенсорного датчика измерения движения 30, к линии PA10 порта A подключен выход SDA, а к линии PA15 подключен выход INT1 упомянутой микросхемы. При этом с помощью линий PA9(SCL), PA10(SDA) реализован интерфейс I2C обмена данными между микроконтроллером и датчиком измерения движения 30, а линия PA15 используется для захвата сигнала прерывания (INT1) от датчика, сигнализирующего об изменении его ориентации в пространстве и готовности передачи данных об измеренной скорости перемещения прибора.
Линии PB0, PB3, PB6, PB7 второго GPIO-порта B используются для выбора (дешифрации) одного из четырех семисегментных индикаторов. К линии PB1, выполняющей альтернативную функцию канала ADC_IN9 встроенного аналого-цифрового преобразователя ADC 24 микроконтроллера, выполняющего измерение уровня заряда батареи, через токоограничивающий резистор подключен выход аккумуляторной батареи, при этом к ее входу подключен выход USB-разъема 8, который используется для заряда батареи от внешнего источника питания.
Кнопка (ключ) 6 блока ввода данных 31 с одной стороны подключена к выходу аккумуляторной батареи, а с другой стороны – к линии PC15 третьего GPIO-порта C, при этом линия PC15 настроена на ввод данных (является приемником тока) и используется для фиксации нажатия на кнопку пользователем и активации устройства.
Кнопка (ключ) 7 блока ввода данных 31 с одной стороны подключена к земле (GND), входу сброса (BOOT0) микроконтроллера и входу PA0 порта A, а с другой стороны – к выходу аккумуляторной батареи и входу PC14, при этом линия PC14 настроена на ввод данных (является приемником тока) и используется для фиксации нажатия на кнопку пользователем; при нажатии на кнопку осуществляется также системный сброс микросхемы и обнуление данных, хранящихся в SRAM-памяти данных 23.
Способ определения угла заточки ножей с помощью инклинометра, используя при этом станок для заточки ножей, осуществляют следующим образом.
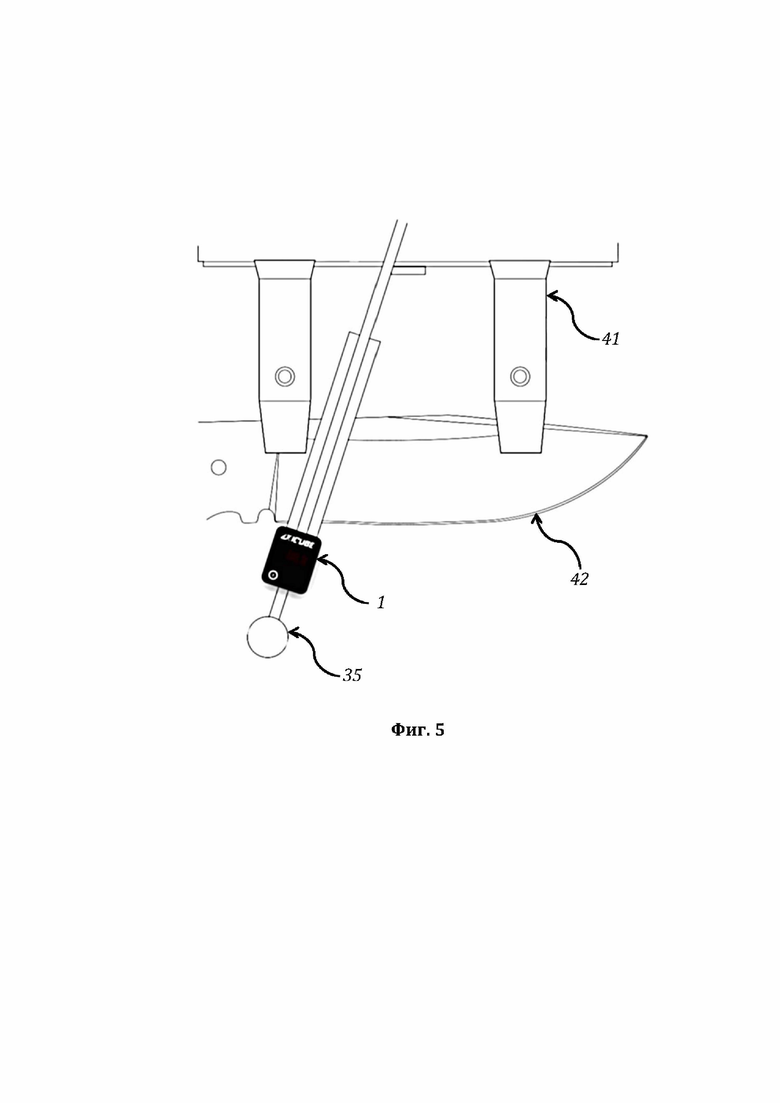
В качестве заточного станка могут использоваться, например, профессиональные точильные станки «Kadet/Blitz» или «Профиль К01-К03» (Системы заточки ножей профиль // TSPROF. URL: https://tsprof.com/ (дата обращения: 16.09.2022)). Ниже приведен пример использования инклинометра для определения угла заточки ножа совместно с точильным станком «Профиль К03» (фиг. 4), имеющим возможность установки на направляющую держателя абразива инклинометра для измерения угла заточки лезвия ножа, получившего обозначение «Axicube One».
Первоначально корпус 1 инклинометра закрепляют на первом фиксаторе 32 абразивного бруска, например с помощью магнитов (на фигурах условно не показаны), которые предварительно крепятся на нижней, боковой и задней стенках корпуса устройства. Далее первый фиксатор 32, подпружиненный пружиной 33, устанавливают на держателе абразива 34, представляющего собой цилиндрическую ось, снабженную на конце сферической ручкой 35 для хвата, при этом пружину 33 фиксатора 32 совмещают с упомянутой ручкой 35. Далее на держатель абразива 34 устанавливают второй фиксатор 36 и фиксируют его положение с помощью винта (на фигурах условно не показан). Далее конец держателя абразива 34 противоположный концу, на котором установлен первый фиксатор 32, устанавливают в шарнирный узел 37 заточной штанги 38 станка. Настройку угла заточки лезвия ножа осуществляют ослаблением винта 39 заточной штанги 38 и перемещением ее по стойке 40. При окончании настройки угла заточки штангу фиксируют винтом 39, после чего в фиксаторах 32 и 36 закрепляют абразивный брусок, а в держатели 41 станка устанавливают затачиваемый нож 42.
При измерении угла заточки ножа первоначально инклинометр включают, нажимая и удерживая в течение 0,5 с кнопку 6 блока ввода данных 31. После включения инклинометр «Axicube One» переходит в режим, установленный до его отключения. Во включенном состоянии при нажатии на кнопку 6 и удержании ее в нажатом состоянии в течение 0,5 с модуль индикации 5 на первых двух семисегментных индикаторах отображает текущий заряд аккумулятора в процентах, а на вторых двух – текущий режим прибора.
Инклинометр «Axicube One» поддерживает четыре режима работы. Первый из них предназначен для измерения угла наклона прибора относительно гравитационного поля Земли. Инклинометр в этом режиме осуществляет измерения относительно базовой поверхности (B) 3, при этом кнопка 7 обнуления данных заблокирована.
Второй режим работы инклинометра предназначен для работы совместно с точильными станками «Kadet/Blitz», а также может применяться для измерений угла между двумя плоскостями. При использовании инклинометра в этом режиме прибор первоначально закрепляют на базовой поверхностью (A) 2 или базовой поверхностью (B) 3 на фиксаторе 32 абразивного бруска. Далее обнуляют прибор, нажимая и удерживая кнопку 7 в течение 0,5 с. После чего устанавливают инклинометр на площадку 43 угломера базовой поверхностью (А) 2, затем настраивают необходимый угол заточки способом, описанным выше.
Третий режим работы инклинометра предназначен для работы совместно с точильными станками «Профиль К01-К03». При использовании инклинометра в этом режиме прибор первоначально устанавливают базовой поверхностью (B) 3 на площадку 43 угломера. Далее обнуляют прибор, нажимая и удерживая кнопку 7 в течение 0,5 с. После чего закрепляют инклинометр базовой поверхностью (B) 3 на фиксаторе 32 абразивного бруска, затем настраивают необходимый угол заточки способом, описанным выше.
Четвертый режим работы инклинометра предназначен для бытовых работ, выполняемых, например, при ремонте, строительстве или настройке оборудования различного назначения. При использовании инклинометра в этом режиме прибор первоначально устанавливают базовой поверхностью (A) 2 или базовой поверхностью (B) 3 на первую плоскость. Далее обнуляют прибор, нажимая и удерживая кнопку 7 в течение 0,5 с. После чего устанавливают инклинометр базовой поверхностью (A) 2 или базовой поверхностью (B) на вторую плоскость. В результате измеряют угол между первой и второй плоскостями.
При использовании инклинометра в первом, втором и третьем режимах работы при заточке ножа 42 абразивным бруском измерение и контроль угла заточки угол наклона абразивного бруска по отношению к подводу ножа осуществляют с помощью модуля индикации 5, предпочтительно, на пяте клинка, в середине лезвия клинка и на его острие. Измерение и контроль угла заточки может осуществляться также и в других положениях абразивного бруска относительно клинка. При этом прибор может быть включен как постоянно, так через некоторое число проходов абразива по подводу затачиваемого ножа для экономии заряда аккумуляторной батареи.
Во все время работы инклинометра операционный блок 10 центрального процессора на основе управляющей программы, хранящейся во FLASH-памяти программ микроконтроллера, используя в качестве буфера SRAM-память данных осуществляет опрос мультисенсорного датчика измерения движения 30, кнопок 6 и 7 блока ввода данных 31, уровня заряда аккумуляторной батареи, а также выводит последнее измеренное значение угла заточки на семисегментные индикаторы модуля индикации 5.
Таким образом, рассмотренный в настоящей заявке способ измерения угла заточки является относительно простым техническим решением, позволяющим точно определять угол заточки режущей кромки ножей при их обработке на специализированных заточных приспособлениях, в частности на профессиональных точильных станках. При этом за счет возможности применения в способе инклинометра, выполненного на основе микропроцессорной системы, достигается снижение трудоемкости технологического процесса заточки и повышение точности контроля за углом положения абразивного бруска относительно подвода ножа, за счет применения в конструкции упомянутого инклинометра модуля индикации и мультисенсорного датчика измерения движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВ | 2021 |
|
RU2768504C1 |
| Устройство для заточки ножей | 2023 |
|
RU2828913C1 |
| Устройство для заточки ножей | 2023 |
|
RU2804027C1 |
| УСТРОЙСТВО ДЛЯ РУЧНОЙ ЗАТОЧКИ НОЖЕЙ | 2021 |
|
RU2761845C1 |
| Способ крепления ножей в заточных системах | 2024 |
|
RU2834561C1 |
| ТОЧИЛКА ДЛЯ НОЖЕЙ | 2022 |
|
RU2787288C1 |
| Устройство для заточки ножей | 2020 |
|
RU2754004C1 |
| Способ заточки и устройство для закрепления ножа при заточке | 2021 |
|
RU2769588C1 |
| СПОСОБ ОБРАБОТКИ СКОЛЬЗЯЩЕЙ ПОВЕРХНОСТИ ЛЕЗВИЯ КОНЬКА | 2023 |
|
RU2822070C1 |
| Устройство для заточки ножей | 1985 |
|
SU1268379A1 |
Изобретение относится к области измерительной техники. Технический результат – повышение точности определения угла заточки подводов ножей. Способ включает в себя предварительную установку абразивного бруска в фиксаторы, установленные на держателе абразива заточного станка, при этом инклинометр закрепляют на фиксаторе абразивного бруска, установленном на конце держателя абразива противоположном концу держателя, устанавливаемому в шарнирный узел заточного станка, далее устанавливают в держатели станка нож, и при заточке лезвия c помощью инклинометра измеряют и контролируют угол наклона абразива по отношению к подводу ножа на пяте клинка, в середине лезвия клинка и на его острие. 3 з.п. ф-лы, 5 ил.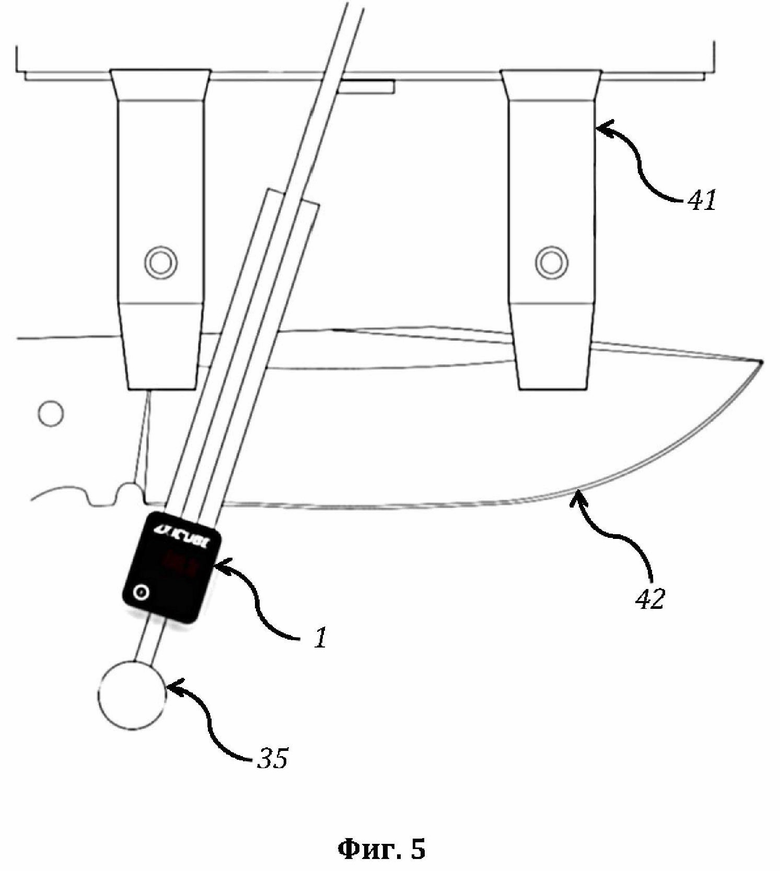
1. Способ определения угла заточки ножей с помощью инклинометра, включающий предварительную установку абразивного бруска в фиксаторы, установленные на держателе абразива заточного станка, отличающийся тем, что инклинометр закрепляют на фиксаторе абразивного бруска, установленном на конце держателя абразива противоположном концу держателя, устанавливаемому в шарнирный узел заточного станка, далее устанавливают в держатели станка нож, и при заточке лезвия c помощью инклинометра измеряют и контролируют угол наклона абразива по отношению к подводу ножа на пяте клинка, в середине лезвия клинка и на его острие.
2. Способ по п.1, отличающийся тем, что для измерения угла заточки применяют электронный инклинометр, снабженный блоком управления с подключенными к нему мультисенсорным датчиком измерения движения, модулем индикации и блоком ввода данных, при этом блок управления инклинометром выполнен на основе микропроцессорной системы.
3. Способ по п.2, отличающийся тем, что применяют инклинометр, состоящий из призматического корпуса, содержащего две взаимно перпендикулярных базовых поверхности, при этом на наружной торцевой поверхности корпуса закреплен модуль индикации, выполненный в виде четырех семисегментных индикаторов, и блок ввода данных, состоящий из двух кнопок, первая из которых выполняет функцию включения устройства, а вторая – функцию обнуления данных; на верхней боковой поверхности инклинометра закреплен USB-разъем, а внутри корпуса инклинометра размещен блок управления с питанием от аккумуляторной батареи.
4. Способ по п.1, отличающийся тем, что инклинометр закрепляют на фиксаторе абразивного бруска с помощью магнитов.
| US 2020338682 A1, 29.10.2020 | |||
| СПОСОБ ПОЛУЧЕНИЯ ОКСИМА СУЛЬФОЛАНОНА 3 | 0 |
|
SU202939A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВ | 2021 |
|
RU2768504C1 |
| 0 |
|
SU145111A1 | |
