Изобретение относится к области сельского хозяйства, а именно к механизации животноводческих ферм, в частности, к устройствам для удаления навоза из производственных построек промышленного содержания животных, и может быть использовано для удаления навоза из животноводческих помещений для беспривязного содержания крупного рогатого скота.
Известен способ управления процессом навозоудаления в животноводческом помещении и устройство для его осуществления по авторскому свидетельству СССР №1588339, кл. A01K 1/01, 1990 г., который предусматривает измерение расхода воды в помещении расходомером и интегратором. По расходу корма на один цикл кормления с учетом его влажности и привесов животных определяют требуемый расход воды на промежутке между кормлениями с помощью блока определения требуемого расхода воды. Регулирование подачи воды в канале ведут по сигналу рассогласования между общим расходом, определяемым интегратором, и требуемым от блока определения требуемого расхода воды. Регулирование осуществляют посредством регулятора расхода
Способ и устройство позволяют обеспечить управление влагосодержанием навозной массы с ошибкой, не превышающей 2%, что позволяет исключить в системе навозоудаления такие явления, как застой и пересыхание навозной массы, и снизить дополнительные затраты на очистку, а также исключить возможность переувлажнения навозной массы и тем самым уменьшить общий объем удаляемых экскрементов, повышая экономичность процесса навозоудаления.
Однако, использование воды возможно и повышает эффективность навозоудаления, но, в тоже время, отрицательно влияет на работу рабочих органов уборочной техники, снижая ее срок службы, благодаря повышенной влажности, а также ухудшает условия содержания животных: повышенная влажность внутри помещения и слякоть в зоне свободного перемещения животных.
Известна система навозоудаления, включающая продольные каналы, снабженные скреперными установками, торцевой поперечный канал, снабженный уборочным транспортером, реверсивные электроприводы продольных и поперечного транспортеров возвратно-поступательного движения, контакторную станцию управления с путевыми выключателями и блоком защиты для каждого реверсивного электропривода (см. Кудрявцев И.Ф. и др. Электрооборудование и автоматизация сельскохозяйственных агрегатов и установок. - М.: Агропромиздат, 1988, с. 201…203).
Известна система навозоудаления, включающая сдвоенные каналы, проходящие по всей площади стойл, накрытые решетками, два поперечных канала, расположенных в торцах продольных каналов ниже их уровня, реверсивные электроприводы продольных транспортеров возвратно-поступательного движения, рабочие органы каждого из которых расположены в продольном сдвоенном канале, реверсивные электроприводы поперечных транспортеров, рабочие органы которых расположены в поперечных каналах, и комплект управления, состоящий из контакторной станции с путевыми выключателями и блоком защиты для каждого реверсивного электропривода.
Недостатками данной системы навозоудаления является невысокая надежность в работе за счет размещения датчиков в «грязной зоне» на большом удалении от станции управления, устаревшей элементной базе, низкой гибкости по модернизации управления и относительно ухудшенные условия содержания животных.
Указанные недостатки обусловлены использованием ручного управления электроприводами транспортеров от контакторной станции управления ими. Уборка навоза производится 2 раза в сутки. Это ведет к неравномерности загрузки, а в ряде случаев и к перегрузке рабочих органов транспортеров, что снижает надежность работы. Несистематичность уборки ухудшает гигиенические условия содержания животных, так как экскременты, задерживаясь в помещении, разлагаются и вызывают повышенное содержание аммиака.
Известна система навозоудаления для бесподстилочного содержания животных по патенту Российской Федерации №1769403, кл. A01K 1/01, 1994 г., принятая заявителем за прототип.Она включает продольные транспортеры с реверсивными электроприводами, рабочие органы которых расположены в накрытых решетками сдвоенных продольных каналах по всей площади стойл, поперечные транспортеры с реверсивными электроприводами, рабочие органы которых размещены в поперечных каналах, расположенных вдоль торцов сдвоенных продольных каналов ниже их уровня, и комплект управления, содержащий контакторную станцию, соединенную посредством блока путевых выключателей и блоков защиты с реверсивными электроприводами. Система навозоудаления снабжена программным реле времени с самовозвратом и блоком логики, при этом выход программного реме времени с возвратом соединен с блоком логики, выходы которого подключены к соответствующим входам управления контакторной станции, причем (N+1)-й выход блока логики, где N-число реверсивных электроприводов транспортеров, соединен со входом самовозврата программного реле времени с самовозвратом, входы самовозврата контакторной станции связаны с первым выходом блока путевых выключателей и выходом блока защиты, а вход самовозврата блока логики подключен ко второму выходу блока путевых выключателей.
Однако, описанная система навозоудаления не обеспечивает необходимую эксплуатационную надежность в работе за счет размещения путевых выключателей в «грязной зоне» на большом удалении от станции управления, устаревшей элементной базе, низкой гибкости по модернизации управления, не обладающих надежностью, а собранная из них схема управления выглядит громоздкой, не обеспечивающей запрограммированный цикл работы, при этом мало улучшающей условия содержания животных.
Технической проблемой при эксплуатации систем очистки от навоза животноводческих ферм является их низкая надежность, из-за ударных нагрузок при пуске транспортеров (отсутствует механизм плавной выборки люфтов в движущихся узлах), низкой точности позиционирования из-за отказов путевых выключателей размещаемых в агрессивной среде, повышенной нагрузки на узлы за счет частоты хода транспортеров (при хорошем качестве очистки каналов), и, как правило, недостаточная защита электродвигателей, в том числе от низкого качества электропитания; ухудшенные условия содержания животных при простоях оборудования или при увеличенных длительных промежутках между циклами из-за перегруженности персонала, включая риск волочения больных животных по открытому навозному каналу; повышенная нагрузка на персонал при обеспечении очистки по графику действиями оператора; неоправданные экономические затраты на обеспечение каждой петли навозоудаления собственным частотным регулирующим приводом для помещений с несколькими петлями навозоудаления.
Поставленная проблема решается тем, что в предлагаемом решении система навозоудаления для беспривязного содержания животных, включающая продольные транспортеры с реверсивными электроприводами, рабочие органы которых расположены в открытых или накрытых решетками сдвоенных или одиночных продольных каналах навозоудаления по всей площади стойл в зоне свободного перемещения животных, поперечные транспортеры с реверсивными электроприводами, рабочие органы которых размещены в поперечных каналах, расположенных вдоль торцов сдвоенных или одиночных продольных каналов ниже их уровня и комплект управления, содержащий силовую схему поочередно питающую электродвигатели реверсивных электроприводов транспортеров, схему логического управления, снабжена бесконтактными датчиками, каждый из которых неподвижно установлен на каждом электродвигателе реверсивного электропривода со стороны крыльчатки охлаждения, и шайбой с лепестками, которая установлена на валу каждого электродвигателя с возможностью вращения вместе с ним; силовая схема, поочередно питающая электродвигатели реверсивных электроприводов транспортеров, снабжена частотно регулируемым приводом и соединена с программируемым логическим контроллером, который входит в логическую схему управления, для запуска заданного количества циклов очистки в сутки и с возможностью защиты от замерзания рабочих органов транспортеров в холодное время года, для чего к входам программируемого логического контроллера подключен бесконтактный датчик собственный для каждого электропривода для подсчета импульсов, создаваемых шайбой с лепестками при вращении вала электродвигателя во время движении рабочего органа, причем программируемый логический контроллер подключен к частотно регулируемому приводу и управляет им, а также имеет программно заданную возможность определения местоположения рабочих органов каждого из управляемых реверсивных электроприводов посредством подсчета импульсов бесконтактных датчиков с учетом направления движения вперед-назад, а также программируемый логический контроллер установлен с возможностью выбора одного из электродвигателей электроприводов, который подключен (отключен) к частотно регулируемому приводу в каждый момент времени для наиболее эффективного использования частотно регулируемого привода с развитым функционалом в отношении любого из электродвигателей системы, для чего частотно регулируемый привод соединен с электродвигателями через пускатели (контакторы), причем сигнал о включении контакторов поступает на дискретные входы частотно регулируемого привода, что исключает его работу на холостом ходу или при подключении более одного электродвигателя, а частотно регулируемый привод встроен в силовую схему и соединен по цифровому интерфейсу, или дискретными сигналами управления с программируемым логическим контроллером, который по данным счета импульсов бесконтактных датчиков электродвигателей реверсивных электроприводов каждого транспортера имеет возможность защиты животных от волочения их рабочим органом в открытом навозном канале, а также имеет возможность корректировки накопленной ошибки при прохождении дистанции рабочим органом, находящимся в зоне гарантированного отсутствия животного.
Кроме того, поставленная проблема решается тем, что в предлагаемом решении способ управления процессом навозоудаления в животноводческом помещении, по которому навоз и потерянные при поедании корма, попадающие в открытые каналы или протаптываемые животными через решетки накрытых каналов по всей площади стойл, попадают в сдвоенные или одиночные продольные каналы навозоудаления, откуда навозную массу удаляют с помощью продольных транспортеров с реверсивными электроприводами посредством рабочих органов, которые располагают в открытых или накрытых решетками сдвоенных или одиночных продольных каналах навозоудаления, в поперечные каналы, которые располагают вдоль торцов сдвоенных или одиночных продольных каналов ниже их уровня, а из поперечных каналов навозную массу удаляют с помощью поперечных транспортеров с реверсивными электроприводами посредством рабочих органов, при этом во время работы реверсивных электроприводов транспортеров предусматривают защиту электродвигателей от аварийных режимов, а сам процесс навозоудаления программируют, причем используют для этого комплект управления, в который включают силовую схему поочередно питающую электродвигатели реверсивных электроприводов транспортеров и схему логического управления, систему навозоудаления снабжают бесконтактными датчиками, каждый из которых неподвижно устанавливают на каждом электродвигателе реверсивного электропривода со стороны крыльчатки охлаждения, и шайбой с лепестками, которую устанавливают на валу каждого электродвигателя с возможностью вращения вместе с ним; силовую схему, поочередно питающую электродвигатели реверсивных электроприводов транспортеров комплекта управления, снабжают частотно регулируемым приводом и соединяют с программируемым логическим контроллером, входящим в схему логического управления, за счет чего осуществляют запуск заданного количества циклов очистки в сутки и обеспечивают защиту от замерзания рабочих органов транспортеров в холодное время года, для чего к входам программируемого логического контроллера подключают бесконтактный датчик собственный для каждого электропривода, с помощью которого обеспечивают подсчет импульсов при движении рабочего органа, причем с помощью программируемого логического контроллера определяют местоположение рабочих органов каждого из управляемых реверсивных электроприводов посредством подсчета импульсов бесконтактных датчиков с учетом направления движения вперед-назад, а также выбирают один из электродвигателей электроприводов, который подключают (отключают) к частотно регулируемому приводу в каждый момент времени для наиболее эффективного использования частотно регулируемого привода с развитым функционалом в отношении любого из электродвигателей системы; частотно регулируемый привод встраивают в силовую схему и соединяют его с программируемым логическим контроллером, который по данным счета импульсов бесконтактных датчиков электродвигателей реверсивных электроприводов каждого транспортера реализует возможность защиты животных от волочения их рабочим органом в открытом навозном канале и корректировку накопленной ошибки при прохождении дистанции рабочим органом, находящимся в зоне гарантированного отсутствия животного.
Кроме того, нахождение в открытом навозном канале и связанную с этим защиту животных от волочения их рабочим органом в случае непредвиденного и случайного их нахождения в открытом навозном канале определяют и осуществляют по превышению значения момента силы на валу электродвигателя или по току нагрузки электродвигателя в пределах зоны возможного присутствия животных, а корректировку накопленной ошибки при прохождении дистанции рабочим органом, находящегося в зоне гарантированного отсутствия животного, осуществляют по моменту силы на валу или току нагрузки электродвигателя в конечной фазе движения рабочего органа в момент его упора в механический ограничитель продольного движения, причем зону возможного присутствия животных вычисляют по счету импульсов, а момент усилия на валу электродвигателя определяют по току нагрузки, считываемому программируемым логическим контроллером с частотного регулируемого привода, а зону гарантированного отсутствия животного вычисляют также по счету импульсов, при плавном столкновении рабочего органа с упором до превышения момента на валу электродвигателя, который определяют по току нагрузки, который считывают программируемым логическим контроллером с частотно регулируемого привода для обоих случаев (защита от волочения и корректировка накопленной ошибки) программируемый логический контроллер снабжают уставками доступными для редактирования, значения которых выбирают из нагрузочных параметров конкретной системы навозоудаления.
Технический результат от использования предлагаемого решения заключается в четкости и точности управления процессом удаления навоза, что значительно повышает надежность работы всей системы в эксплуатации, в том числе и в зимнее время года, а это, в свою очередь, улучшает качество условий содержания животных в животноводческих помещениях. Такое стало возможным благодаря грамотной разработке системы, как единого целого, и использованию в ней программируемого логического контроллера и частотно регулируемого привода.
Применение программируемого логического контроллера позволяет:
- осуществить самостоятельный запуск заданного количества циклов очистки в сутки, которые свободно выбираются оператором при настройке системы, исходя из технологических потребностей животноводческой фермы;
- защитить от замерзания движущиеся узлы системы автоматическим периодическим коротким возвратно-поступательным движением рабочего органа, которое активируется оператором при технологической потребности на зимний период;
- рассчитать местоположение рабочих органов каждого из управляемых реверсивных электроприводов посредством подсчета импульсов бесконтактных датчиков, с учетом направления движения вперед-назад;
- сделать выбор одного из двигателей электроприводов (поочередно), который подключен (отключен) к частотно регулируемому приводу в каждый момент времени, для наиболее эффективного использования относительно дорогостоящего частотно регулируемого привода с развитым функционалом.
Применение частотно регулируемого привода, который кроме стандартных функций защиты электродвигателей от перегрузок, некачественного питания, плавного управления частотой вращения электродвигателей, реверсирования, дистанционной диагностики и благодаря совместному использованию с программируемым логическим контроллером реализует для каждого из транспортеров следующие функции:
- защиту животных от волочения их рабочим органом в открытом навозном канале по значению момента силы на валу электродвигателя или тока нагрузки электродвигателя для зоны возможного присутствия животных;
- корректировку возможного накопления ошибки при прохождении дистанции после прихода рабочего органа в зону гарантированного отсутствия животного по моменту силы на валу или току нагрузки электродвигателя в конечной фазе движения рабочего органа при его упоре на механическом стопоре продольного движения.
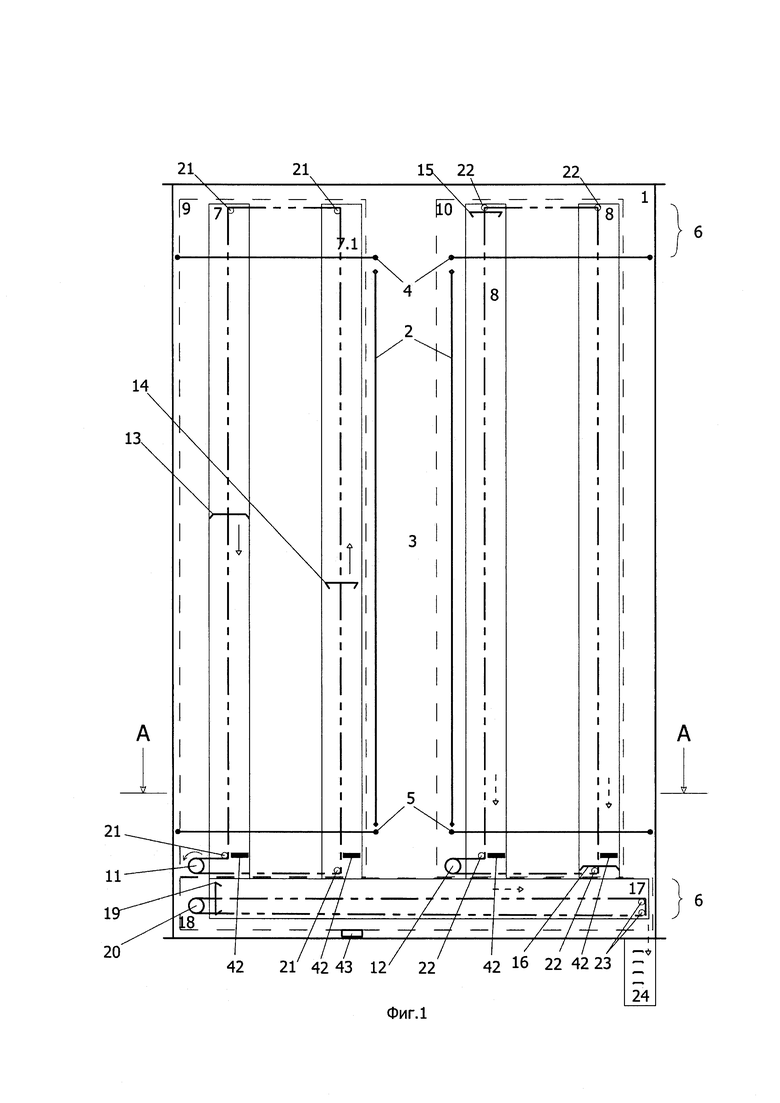
На фиг. 1 изображена технологическая схема навозоудаления с расположением устройств, механизмов и элементов системы навозоудаления на примере беспривязного содержания животных;
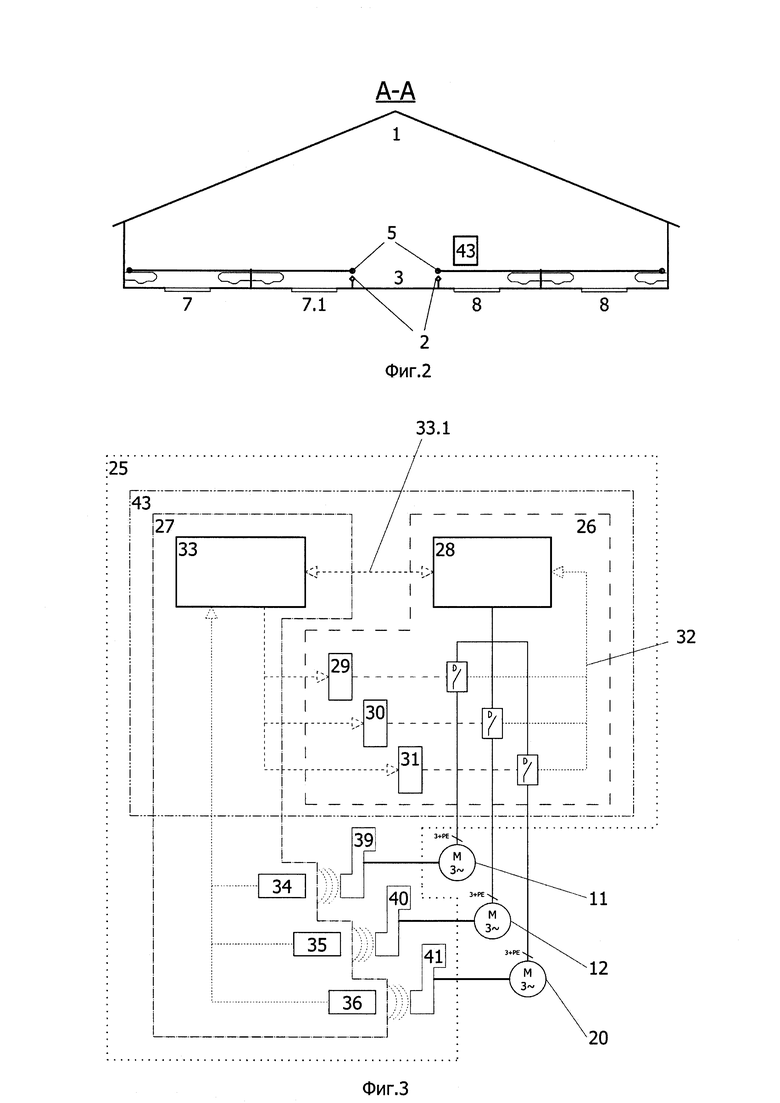
На фиг. 2 изображен поперечный разрез животноводческого помещения на фиг. 1;
На фиг. 3 схематично изображен комплект управления рабочими органами скребковой системы навозоудаления;
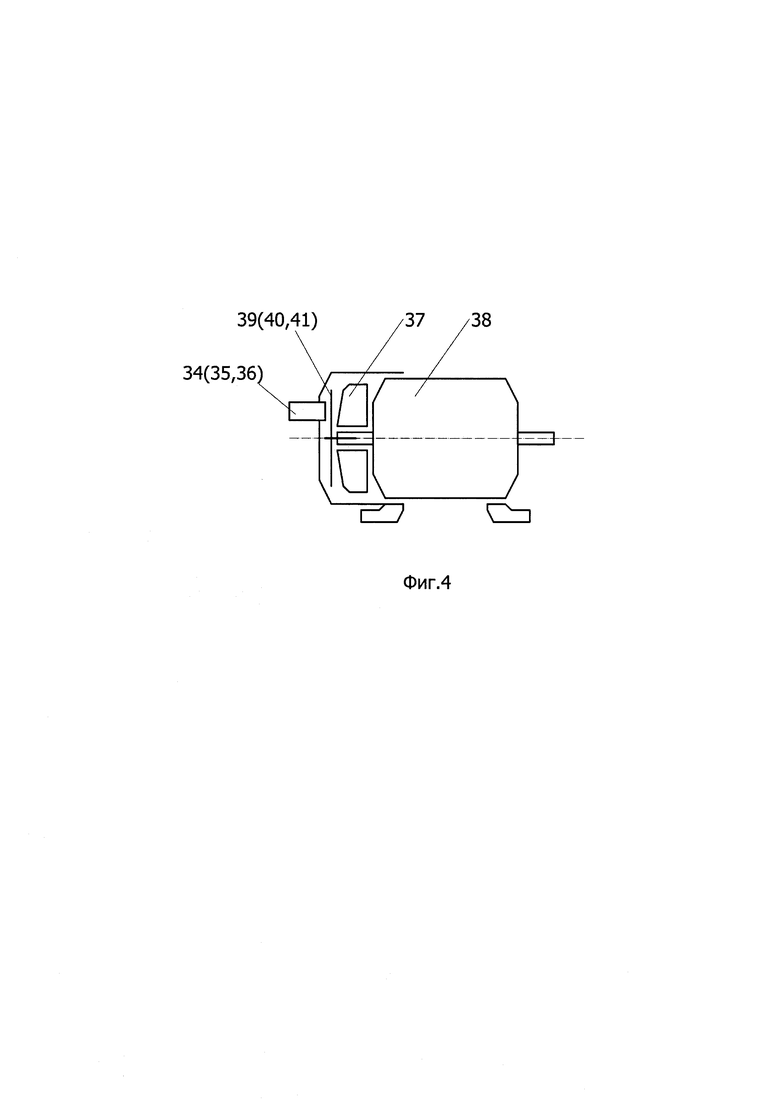
На фиг. 4 схематично изображен электродвигатель с крыльчаткой, бесконтактными датчиками и шайбой с лепестками - элементами комплекта управления рабочими органами скребковой системы навозоудаления.
Предлагаемая система навозоудаления для беспривязного содержания животных размещена в животноводческом помещении здания фермы 1, в котором выделены зоны свободного беспривязного перемещения животных отделенные перегородками 2 от кормового стола 3 и перегородками 4 и 5 от технической зоны 6, в которой размещено технологическое оборудование.
В каждой зоне свободного перемещения животных выполнены, например, сдвоенные продольные каналы навозоудаления 7, 7.1 (петля НУ1) и 8 (петля НУ2), в которых установлены продольные транспортеры 9 и 10 с реверсивными электроприводами 11 и 12, рабочие органы 13, 14, 15, и 16 которых, выполненные, например, в виде скребков, установлены с возможностью циклического возвратно-поступательного движения с помощью реверсивных электроприводов 11 и 12 и размещены в открытых сдвоенных продольных каналах навозоудаления по всей площади стойл в зоне свободного перемещения животных.
Вдоль торцов сдвоенных продольных каналов 7, 7.1 и 8 ниже их уровня выполнен поперечный канал 17 (петля НУЗ), в котором установлен поперечный транспортер 18 с рабочим органом 19 и реверсивным электроприводом 20 для очистки поперечного навозного канала.
Комплект оборудования, состоящий из реверсивного электропривода 11, рабочих органов 13 и 14, комплекта обводных роликов 21 и протяжного троса или цепи, осуществляющий возвратно-поступающее движение в канале 7 и канале 7.1 представляет собой продольный транспортер 9, а именно, петлю навозоудаления НУ1. Соответственно, комплект оборудования, состоящий из реверсивного электропривода 12, рабочих органов 15 и 16 с собственным протяжным тросом или цепью и комплектом обводных роликов 22, является продольным транспортером 10, а именно, петлей навозоудаления НУ2. А поперечный транспортер 18, петля навозоудаления НУЗ, состоит из реверсивного электропривода 20, протяжного троса или цепи и обводных роликов 23 с рабочим органом 19, при движении вперед которого навоз подают к наклонному транспортеру 24 для периодического удаления за границу здания 1 и последующего вывоза.
Комплект управления 25 (фиг. 3) включает в себя силовую схему 26, поочередно питающую электродвигатели реверсивных электроприводов транспортеров, и схему логического управления 27. Силовая схема 26 состоит из частотно регулируемого привода (ЧРП) 28, контакторов 29,30,31 и цепей контроля контакторов 32, которые управляются схемой логического управления 27, определяющей какой из реверсивных электроприводов 11,12, или 20 в каждый момент подключен к частотно регулируемому приводу 28 и может управляться, осуществляя движение рабочих органов 13, 14, 15, 16 и 19.
Схема логического управления 27 состоит из программируемого логического контроллера (ПЛК) 33, бесконтактных датчиков 34, 35, 36 расположенных со стороны крыльчатки 37 охлаждения (фиг. 4) электродвигателей 38 каждого из реверсивных электроприводов 11, 12 и 20. Схема логического управления 27 посредством выходных дискретных управляющих сигналов осуществляет включение/отключение контакторов 29, 30, 31 в зависимости от шага цикла очистки (табл.1).
Система навозоудаления для беспривязного содержания животных снабжена бесконтактными датчиками 34, 35, 36 каждый из которых неподвижно установлен на каждом электродвигателе 38 реверсивного электропривода 11, 12, и 20 со стороны крыльчатки 37 охлаждения, и шайбой 39, 40 и 41 с лепестками, которая установлена на валу каждого электродвигателя 38 с возможностью вращения вместе с ним.
Силовая схема 26, поочередно питающая электродвигатели 38 реверсивных электроприводов 11, 12 и 20 транспортеров 9, 10 и 18, снабжена частотно регулируемым приводом 28, который управляется программируемым логическим контроллером 33, входящим в схему логического управления и предназначенным для запуска заданного количества циклов очистки в сутки и с возможностью защиты от замерзания рабочих органов 13, 14, 15, 16 и 19 транспортеров 9, 10 и 18 в холодное время года, для чего к входам программируемого логического контроллера 33 подключен бесконтактный датчик 34 (35, 36) собственный для каждого электропривода для подсчета импульсов, создаваемых шайбой 39 (40, 41) с лепестками при вращении вала электродвигателя 38 во время движении рабочего органа.
Причем программируемый логический контроллер 33 подключен к частотно регулируемому приводу 28 и управляет им, а также имеет программно заданную возможность определения местоположения рабочих органов каждого из управляемых реверсивных электроприводов посредством подсчета импульсов бесконтактных датчиков 34 (35, 36) с учетом направления движения вперед-назад.
А также программируемый логический контроллер 33 установлен с возможностью выбора одного из электродвигателей 38 электроприводов 11,12 и 20, который подключен (отключен) к частотно регулируемому приводу 28 в каждый момент времени для наиболее эффективного использования частотно регулируемого привода 28 с развитым функционалом в отношении любого из электродвигателей 38 электроприводов 11, 12 и 20 системы, для чего частотно регулируемый привод 28 соединен с электродвигателями 38 через пускатели (контакторы) 29, 30, 31. Причем сигнал о включении контакторов 29, 30, 31 поступает на дискретные входы частотно регулируемого привода 28, что исключает его работу на холостом ходу или при подключении более одного электродвигателя, а частотно регулируемый привод 28 встроен в силовую схему 26 и соединен по цифровому интерфейсу, или дискретными сигналами управления с программируемым логическим контроллером 33, который по данным счета импульсов бесконтактных датчиков 34 (35,36) электродвигателей 38 реверсивных электроприводов 11 и 12 каждого транспортера 9 и 10 имеет возможность защиты животных от волочения их рабочим органом 13, 14, 15 и 16 в открытом навозном канале 7,7.1 и 8, а также имеет возможность корректировки накопленной ошибки при прохождении дистанции рабочим органом, находящимся в зоне гарантированного отсутствия животного для всех транспортеров 9, 10 и 18.
На фиг. 1 изображено исходное положение механизмов системы в данный момент времени. Где.
Реверсивный электропривод 11 продольного транспортера 9 (петля НУ1) вращается вперед (условно показано направление против часовой стрелки), рабочий орган 13 в открытом состоянии движется вперед в сторону ограждения 5 и поперечного канала 17 по каналу 7, а рабочий орган 14 находится в закрытом состоянии и движется в обратном направлении (назад) по каналу 7.1 к исходной позиции перед следующим этапом (фазой 2 шага 1) цикла очистки.
Примечание: закрытое и открытое положение рабочих органов определяется конструкцией и механически изменяется направлением движения рабочего органа (скребка).
Продольный транспортер 10 (петля НУ2) и поперечный транспортер 18 (петля НУЗ) со своими рабочими органами 15, 16 и 19 находятся в неподвижном исходном положении, подготовленные к собственным шагам цикла очистки.
Описанное состояние оборудования, отраженное на фиг. 1, соответствует шагу 1, фазе 1, таблицы 1 и составляет часть полного цикла, работа по которому определяется программной реализацией алгоритма программируемого логического контроллера 33 (фиг. 3), который предусматривает внесение и изменение графика запуска циклов очистки через пользовательский интерфейс программируемого логического контроллера 33. Программируемый логический контроллер 33 относится к схеме логического управления 27 и расположен совместно с силовой схемой 26, питающей реверсивные электроприводы 11, 12, 20 в шкафу 43.

Управляют процессом навозоудаления в животноводческом помещении следующим образом.
Систему навозоудаления снабжают бесконтактными датчиками 34, 35, 36, каждый из которых неподвижно устанавливают на каждом электродвигателе 38 реверсивного электропривода 11, 12, и 20 со стороны крыльчатки охлаждения 37, и шайбой 39 (40, 41) с лепестками, которую устанавливают на валу каждого электродвигателя 38 с возможностью вращения вместе с валом (крыльчаткой).
Силовую схему 26, поочередно питающую электродвигатели 38 реверсивных электроприводов 11, 12, и 20 транспортеров 9, 10 и 18 комплекта управления 25, снабжают частотно регулируемым приводом 28, который управляется программируемым логическим контроллером 33, входящим в логическую схему управления с целью запуска заданного количества циклов очистки в сутки и обеспечения защиты от замерзания рабочих органов транспортеров в холодное время года. Для этого к входам программируемого логического контроллера 33 подключают бесконтактные датчики 34, 35 и 36 собственные для каждого электропривода, с помощью которых обеспечивают подсчет импульсов при движении рабочего органа.
Причем с помощью программируемого логического контроллера 33 определяют местоположение рабочих органов каждого из управляемых реверсивных электроприводов посредством подсчета импульсов бесконтактных датчиков с учетом направления движения вперед-назад, а также выбирают один из электродвигателей 38 электроприводов 11, 12 и 20, который подключают (отключают) к частотно регулируемому приводу 28 в каждый момент времени для наиболее эффективного использования частотно регулируемого привода 28 с развитым функционалом в отношении любого из электродвигателей 38 системы. Частотно регулируемый привод 28 встраивают в силовую схему 26 и соединяют его с программируемым логическим контроллером 33, входящим в схему логического управления 27, который по данным счета импульсов бесконтактных датчиков 34, 35 и 36 электродвигателей 38 реверсивных электроприводов 11, 12 и 20 каждого транспортера 9,10 и 18 реализует возможность защиты животных от волочения их рабочим органом 13, 14, 15, 16 в открытом навозном канале 7, 7.1 и 8, а также корректировку накопленной ошибки при прохождении дистанции рабочим органом, находящимся в зоне гарантированного отсутствия животного.
Нахождение в открытом навозном канале и связанную с этим дальнейшую защиту животных от волочения их рабочим органом в случае непредвиденного и случайного их нахождения в открытом навозном канале определяют и осуществляют по превышению значения момента силы на валу или по току нагрузки электродвигателя 38 (электроприводы 11 и 12) в пределах зоны возможного присутствия животных, а корректировку накопленной ошибки при прохождении дистанции рабочим органом, находящегося в зоне гарантированного отсутствия животного, осуществляют по моменту силы на валу или току нагрузки электродвигателя 38 (электроприводы 11, 12 и 20) в конечной фазе движения рабочего органа в момент его упора в механический ограничитель 42 продольного движения.
Причем зону возможного присутствия животных и зону гарантированного отсутствия животного вычисляют по счету импульсов, а момент усилия на валу электродвигателя определяют по току электродвигателя, считываемому программируемым логическим контроллером 33 с частотного регулируемого привода 28. Для контроля столкновения рабочего органа с животным или упором 42 по превышению момента на валу электродвигателя 28 в обоих случаях (защита от волочения и корректировка накопленной ошибки) программируемый логический контроллер 33 снабжают уставками доступными для редактирования, которые выбирают из нагрузочных параметров конкретной системы навозоудаления.
Система навозоудаления для беспривязного содержания животных работает следующим образом. Пример.
Программируемый логический контроллер 33 отслеживает момент времени запуска цикла очистки по заранее выбранному графику. В момент начала цикла (шаг1, фаза1) программируемый логический контроллер 33 подключает реверсивный электропривод 11 к частотно регулируемому приводу 28 посредством включения контактора 29 и получает подтверждение по цифровому интерфейсу 33.1 от частотно регулируемого привода 28 о включенном состоянии контактора 29, которое частотно регулируемый привод 28 контролирует по цепям контроля контакторов 32. Если все положения/состояния соответствуют требованию исходных состояний шаг 1, фаза 1, табл. 1, то программируемый логический контроллер 33 дает команду программируемый логический контроллер 28 на вращение электропривода 11 в направлении «вперед». Частотно регулируемый привод 28 формирует выходное напряжение, плавно увеличивая обороты электропривода 11 до номинальных, при этом вращение вала электродвигателя 38 обеспечивает вращение лепестковой шайбы 39, закрепленной на валу электродвигателя 38 со стороны крыльчатки обдува 37. Лепестки шайбы 39 воздействуют на бесконтактный датчик 34, который формирует импульсы напряжения, считываемые программируемым логическим контроллером 33 через собственные дискретные входы. Таким образом, по количеству импульсов, формируемых датчиком 34 программируемый логический контроллер 33 оценивает дистанцию, пройденную рабочими органами 13 и 14 от исходного положения до текущего. В ходе поступательного движения рабочего органа 13 в направлении поперечного канала 17 он попадает в зону нахождения животных, которая ограничена ограждениями 2, 4, 5. В этой зоне активирован режим защиты животных от волочения в навозных каналах 7 и 7.1, при котором превышение тока выше уставки означает что препятствием может оказаться лежащее животное, при этом программируемый логический контроллер 33 управляет движением реверсивного электропривода 11 через частотно регулируемый привод 28, реализуя три попытки поднять животное с отходом рабочего органа 13 или 14 на фиксированную дистанцию и попыткой продолжения поступательного движения. Дистанция отхода при этом так же рассчитывается по количеству импульсов от датчика 34. Если препятствие не устранено, то продольный транспортер 9 (петля НУ1) исключается из автоматического управления и остается в состоянии ошибки до решения технического персонала, а схема логического управления 27 переходит к следующему шагу цикла по табл. 1 - работа с продольным транспортером 10 (петля НУ2). Если препятствие не было встречено рабочим органом 13 или устранено, он продолжает движение «вперед» и попадает в зону технологического оборудования 6, в которой активируется режим корректировки накопленной ошибки. При прохождении зоны 6 рабочий орган 13 в конце дистанции упирается в механический упор 42. Если ток нагрузки достигает значения уставки тока упора, то происходит корректировка (обнуление) текущего положения рабочего органа 13 (при этом значение уставки тока упора выше, чем уставка тока защиты от волочения животного). Таким образом происходит обнуление накопленной ошибки расчета дистанции, которая возможна при прохождении длинных дистанций за счет механических недостатков скреперной системы навозоудаления (растяжение тросов/цепей, проскальзывания, произвольные перемещения из-за внешних факторов, самооткаты и т.п.).
За время движения «вперед» рабочего органа 13 канала 7 рабочий орган 14 (в закрытом состоянии) канала 7.1 движется в обратном направлении «назад» на исходную позицию. При этом, т.к. нагрузка движения рабочего органа 14 так же передается на реверсивный электропривод 11, то и защита животных от волочения работает в обоих каналах 7 и 7.1.
Во второй фазе шага 1 цикла очистки продольного транспортера 9 (петля НУ1) происходит обратное движение рабочего органа 13 («назад») и поступательное движение рабочего органа 14 «вперед», при этом команда от программируемого логического контроллера 33 в частотно регулируемый привод 28 на реверс движения поступает после завершения хода вперед рабочего органа 13 и соответственно сброса навозных масс в поперечный канал 17, собранных из продольного канала 7. Фаза 2 шага 1 в точности повторяет первую фазу шага 1 для рабочего органа 14.
Шаг 2, фаза 1 и фаза 2 (см. табл. 1) цикла очистки для продольного транспортера 10 (петля НУ2) полностью повторяет шаг 1 для транспортера 9 и выполняется после завершения шага 1 или в случае отказа (диагностированной ошибки) продольного транспортера 9 (петля НУ1) и исключения его из автоматического цикла очистки.
Работа поперечного транспортера 18 (петля НУЗ) отличается тем, что в ее алгоритме отсутствует контроль волочения животного в поперечном навозном канале, т.к. на всей траектории движения рабочего органа 19 невозможно присутствие животного, что определено конструктивными решениями здания. При этом рабочий цикл поперечного транспортера 18 (петля НУЗ) так же состоит из движения рабочего органа 19 «вперед» на выгрузку и «назад» на исходную позицию.
Дополнительно, при активации режима защиты от замерзания, программируемый логический контроллер 33 вне цикла очистки с определенной периодичностью производит движение рабочими органами всех транспортеров на фиксированную дистанцию вперед и назад, дистанция отхода при этом так же рассчитывается по количеству импульсов от соответствующих датчиков.
После завершения полного цикла очистки - последовательного возвратно поступательного движения всех трех петель навозоудаления схема логического управления 27 отключает контакторы 29, 30, 31 и остается в режиме ожидания (шаг 0, табл. 1) до наступления времени запуска следующего цикла уборки, который отслеживает программируемый логический контроллер 33.
Использование предлагаемого технического решения позволило:
1. повысить эксплуатационную надежность,
- благодаря размещению бесконтактных датчиков и шайбы с лепестками на каждом электродвигателе реверсивного электропривода, переместив их из грязной зоны;
- благодаря снижению ударных нагрузок на механическую часть;
- благодаря повышению точности управления всей системой навозоудаления за счет применения программируемого логического контроллера и шайбы с лепестками на электродвигателе;
- благодаря введению режима антизамерзания за счет использования программируемого логического контроллера;
- благодаря предложенной защищенности электроприводов от перегрузки, некачественного питания и исключения коммутационных аппаратов из процесса реверсирования рабочих органов за счет использования в работе системы частотно регулируемого привода;
2. улучшить условия содержания животных,
- благодаря исключению возможности волочения рабочим органом больных животных по открытому навозному каналу за счет использования в системе управления процессом навозоудаления частотно регулируемого привода и программируемого логического контроллера;
- благодаря снижению нагрузки на здоровье животных, улучшив качество очистки и открытых навозных каналов и внутреннего объема животноводческого помещения от аммиака за счет использования программируемого логического контроллера;
3. снизить загрузку персонала в части содержания животноводческого помещения и управления процессом навозоудаления,
- благодаря исключению необходимости постоянного контроля оборудования навозоудаления или ручного пуска цикла очистки за счет использования программируемого логического контроллера;
- благодаря снижению простоев на ремонт и потребности в квалифицированном персонале для устранения неисправностей за счет использования частотно регулируемого привода;
4. повысить экономическую эффективность использования оборудования навозоудаления, работая с тремя транспортерами одним основным комплектом оборудования высокой стоимости с добавлением коммутационных аппаратов низкой стоимости (контакторы) за счет использования программируемого логического контроллера, частотно регулируемого привода и шайбы с лепестками.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА НАВОЗОУДАЛЕНИЯ ДЛЯ БЕСПОДСТИЛОЧНОГО СОДЕРЖАНИЯ ЖИВОТНЫХ | 1990 |
|
RU1769403C |
| Система централизованного освещения производственных помещений и сооружений с большой световой нагрузкой | 2019 |
|
RU2729476C1 |
| СИСТЕМА НАВОЗОУДАЛЕНИЯ ИЗ ЖИВОТНОВОДЧЕСКИХ ПОМЕЩЕНИЙ | 1994 |
|
RU2084139C1 |
| Решетка перекрытия каналов навозоудаления в животноводческих помещениях | 2020 |
|
RU2742507C1 |
| Устройство для удаления навоза из-под решетчатых полов | 2016 |
|
RU2647090C1 |
| Способ управления процессом навозоудаления в животноводческом помещении и устройство для его осуществления | 1987 |
|
SU1588339A1 |
| УСТАНОВКА ДЛЯ УДАЛЕНИЯ НАВОЗА | 1993 |
|
RU2041623C1 |
| СПОСОБ УДАЛЕНИЯ НАВОЗА | 2008 |
|
RU2372774C1 |
| ТРАНСПОРТЕР СКРЕБКОВЫЙ ГОРИЗОНТАЛЬНЫЙ КОНСОЛЬНЫЙ ДЛЯ ЖИВОТНОВОДСТВА | 2012 |
|
RU2494612C1 |
| Животноводческая ферма | 1986 |
|
SU1311675A1 |
Группа изобретений относится к области сельского хозяйства, а именно к механизации животноводческих ферм, в частности к устройствам для удаления навоза из производственных построек промышленного содержания животных. Система навозоудаления в животноводческом помещении для беспривязного содержания животных включает продольные транспортеры с реверсивными электроприводами, рабочие органы которых расположены в открытых или накрытых решетками сдвоенных или одиночных продольных каналах навозоудаления по всей площади стойл в зоне свободного перемещения животных. Система включает также поперечные транспортеры с реверсивными электроприводами, рабочие органы которых размещены в поперечных каналах, расположенных вдоль торцов сдвоенных или одиночных продольных каналов ниже их уровня, и комплект управления, содержащий силовую схему, поочередно питающую электродвигатели реверсивных электроприводов транспортеров, схему логического управления. Система снабжена бесконтактными датчиками, каждый из которых неподвижно установлен на каждом электродвигателе реверсивного электропривода со стороны крыльчатки охлаждения, и шайбой с лепестками, которая установлена на валу каждого электродвигателя с возможностью вращения вместе с ним. Силовая схема, поочередно питающая электродвигатели реверсивных электроприводов транспортеров, снабжена частотно-регулируемым приводом и соединена с программируемым логическим контроллером, который входит в логическую схему управления, для запуска циклов очистки в сутки и с возможностью защиты от замерзания рабочих органов транспортеров в холодное время года, для чего к входам программируемого логического контроллера подключен бесконтактный датчик собственный для каждого электропривода для подсчета импульсов, создаваемых шайбой с лепестками при вращении вала электродвигателя во время движении рабочего органа. Причем программируемый логический контроллер подключен к частотно-регулируемому приводу и управляет им, а также имеет программную возможность определения местоположения рабочих органов каждого из управляемых реверсивных электроприводов посредством подсчета импульсов бесконтактных датчиков с учетом направления движения вперед-назад. Программируемый логический контроллер также установлен с возможностью выбора одного из электродвигателей электроприводов, который подключен/отключен к частотно регулируемому приводу в каждый момент времени, для чего частотно-регулируемый привод соединен с электродвигателями через контакторы. Причем сигнал о включении контакторов поступает на дискретные входы частотно-регулируемого привода, что исключает его работу на холостом ходу или при подключении более одного электродвигателя. Частотно-регулируемый привод встроен в силовую схему и соединен по цифровому интерфейсу или дискретными сигналами управления с программируемым логическим контроллером, который по данным счета импульсов бесконтактных датчиков электродвигателей реверсивных электроприводов каждого транспортера имеет возможность защиты животных от волочения их рабочим органом в открытом навозном канале, а также имеет возможность корректировки накопленной ошибки при прохождении дистанции рабочим органом, находящимся в зоне гарантированного отсутствия животного. Технический результат заключается в повышении эксплуатационной надежности, улучшении условий содержания животных, снижении загрузки персонала в части содержания животноводческого помещения и управления процессом навозоудаления, повышении экономической эффективности использования оборудования навозоудаления. 2 н. и 1 з.п. ф-лы, 4 ил., 1 табл.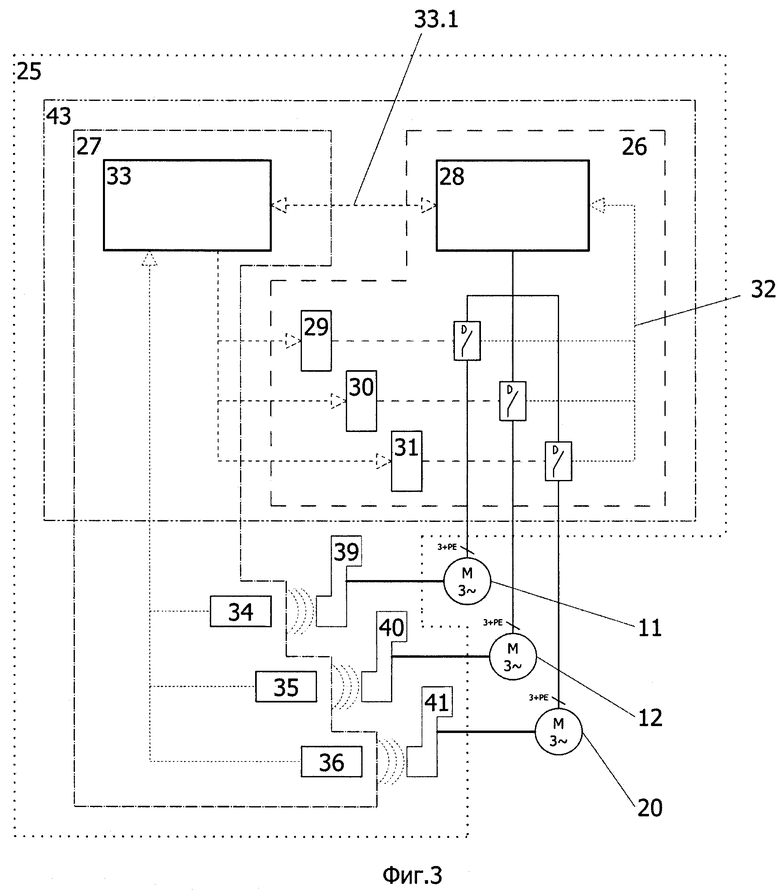
1. Система навозоудаления в животноводческом помещении для беспривязного содержания животных, включающая продольные транспортеры с реверсивными электроприводами, рабочие органы которых расположены в открытых или накрытых решетками сдвоенных или одиночных продольных каналах навозоудаления по всей площади стойл в зоне свободного перемещения животных, поперечные транспортеры с реверсивными электроприводами, рабочие органы которых размещены в поперечных каналах, расположенных вдоль торцов сдвоенных или одиночных продольных каналов ниже их уровня, и комплект управления, содержащий силовую схему, поочередно питающую электродвигатели реверсивных электроприводов транспортеров, схему логического управления, отличающаяся тем, что она снабжена бесконтактными датчиками, каждый из которых неподвижно установлен на каждом электродвигателе реверсивного электропривода со стороны крыльчатки охлаждения, и шайбой с лепестками, которая установлена на валу каждого электродвигателя с возможностью вращения вместе с ним; силовая схема, поочередно питающая электродвигатели реверсивных электроприводов транспортеров, снабжена частотно-регулируемым приводом и соединена с программируемым логическим контроллером, который входит в логическую схему управления, для запуска циклов очистки в сутки и с возможностью защиты от замерзания рабочих органов транспортеров в холодное время года, для чего к входам программируемого логического контроллера подключен бесконтактный датчик собственный для каждого электропривода для подсчета импульсов, создаваемых шайбой с лепестками при вращении вала электродвигателя во время движении рабочего органа, причем программируемый логический контроллер подключен к частотно-регулируемому приводу и управляет им, а также имеет программную возможность определения местоположения рабочих органов каждого из управляемых реверсивных электроприводов посредством подсчета импульсов бесконтактных датчиков с учетом направления движения вперед-назад, а также программируемый логический контроллер установлен с возможностью выбора одного из электродвигателей электроприводов, который подключен/отключен к частотно-регулируемому приводу в каждый момент времени, для чего частотно-регулируемый привод соединен с электродвигателями через контакторы, причем сигнал о включении контакторов поступает на дискретные входы частотно-регулируемого привода, что исключает его работу на холостом ходу или при подключении более одного электродвигателя, а частотно-регулируемый привод встроен в силовую схему и соединен по цифровому интерфейсу или дискретными сигналами управления с программируемым логическим контроллером, который по данным счета импульсов бесконтактных датчиков электродвигателей реверсивных электроприводов каждого транспортера имеет возможность защиты животных от волочения их рабочим органом в открытом навозном канале, а также имеет возможность корректировки накопленной ошибки при прохождении дистанции рабочим органом, находящимся в зоне гарантированного отсутствия животного.
2. Способ управления процессом навозоудаления в животноводческом помещении для беспривязного содержания животных, по которому навоз и потерянные при поедании корма, попадающие в открытые каналы или протаптываемые животными через решетки накрытых каналов по всей площади стойл, попадают в сдвоенные или одиночные продольные каналы навозоудаления, откуда навозную массу удаляют с помощью продольных транспортеров с реверсивными электроприводами посредством рабочих органов, которые располагают в открытых или накрытых решетками сдвоенных или одиночных продольных каналах навозоудаления, в поперечные каналы, которые располагают вдоль торцов сдвоенных или одиночных продольных каналов ниже их уровня, а из поперечных каналов навозную массу удаляют с помощью поперечных транспортеров с реверсивными электроприводами посредством рабочих органов, при этом во время работы реверсивных электроприводов транспортеров предусматривают защиту электродвигателей от аварийных режимов, а сам процесс навозоудаления программируют, причем используют для этого комплект управления, в который включают силовую схему, поочередно питающую электродвигатели реверсивных электроприводов транспортеров, и схему логического управления, отличающийся тем, что систему навозоудаления снабжают бесконтактными датчиками, каждый из которых неподвижно устанавливают на каждом электродвигателе реверсивного электропривода со стороны крыльчатки охлаждения, и шайбой с лепестками, которую устанавливают на валу каждого электродвигателя с возможностью вращения вместе с ним; силовую схему, поочередно питающую электродвигатели реверсивных электроприводов транспортеров комплекта управления, снабжают частотно-регулируемым приводом и соединяют с программируемым логическим контроллером, входящим в схему логического управления, за счет чего осуществляют запуск циклов очистки в сутки и обеспечивают защиту от замерзания рабочих органов транспортеров в холодное время года, для чего к входам программируемого логического контроллера подключают бесконтактный датчик собственный для каждого электропривода, с помощью которого обеспечивают подсчет импульсов при движении рабочего органа, причем с помощью программируемого логического контроллера определяют местоположение рабочих органов каждого из управляемых реверсивных электроприводов посредством подсчета импульсов бесконтактных датчиков с учетом направления движения вперед-назад, а также выбирают один из электродвигателей электроприводов, который подключают/отключают к частотно-регулируемому приводу в каждый момент времени; частотно-регулируемый привод встраивают в силовую схему и соединяют его с программируемым логическим контроллером, который по данным счета импульсов бесконтактных датчиков электродвигателей реверсивных электроприводов каждого транспортера реализует возможность защиты животных от волочения их рабочим органом в открытом навозном канале и корректировку накопленной ошибки при прохождении дистанции рабочим органом, находящимся в зоне гарантированного отсутствия животного.
3. Способ по п. 2, отличающийся тем, что нахождение в открытом навозном канале и связанную с этим защиту животных от волочения их рабочим органом в случае непредвиденного и случайного их нахождения в открытом навозном канале определяют и осуществляют по превышению значения момента силы на валу электродвигателя или по току нагрузки электродвигателя в пределах зоны возможного присутствия животных, а корректировку накопленной ошибки при прохождении дистанции рабочим органом, находящегося в зоне гарантированного отсутствия животного, осуществляют по моменту силы на валу или току нагрузки электродвигателя в конечной фазе движения рабочего органа в момент его упора в механический ограничитель продольного движения, причем зону возможного присутствия животных вычисляют по счету импульсов, а момент усилия на валу электродвигателя определяют по току нагрузки, считываемому программируемым логическим контроллером с частотного-регулируемого привода, а зону гарантированного отсутствия животного вычисляют также по счету импульсов, при плавном столкновении рабочего органа с упором до превышения момента на валу электродвигателя, который определяют по току нагрузки, который считывают программируемым логическим контроллером с частотно-регулируемого привода для обоих случаев: защита от волочения и корректировка накопленной ошибки, а программируемый логический контроллер снабжают уставками, доступными для редактирования, значения которых выбирают из нагрузочных параметров конкретной системы навозоудаления.
| СИСТЕМА НАВОЗОУДАЛЕНИЯ ДЛЯ БЕСПОДСТИЛОЧНОГО СОДЕРЖАНИЯ ЖИВОТНЫХ | 1990 |
|
RU1769403C |
| УСТРОЙСТВО ДЛЯ АВАРИЙНОГО ОТКЛЮЧЕНИЯ ПРИВОДА ТРАНСПОРТЕРА | 2017 |
|
RU2695645C1 |
| ПРЕДОХРАНИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ УСТРОЙСТВА СОСКРЕБАНИЯ НАВОЗА | 2011 |
|
RU2552959C2 |
| Устройство для уборки навоза | 1981 |
|
SU954071A1 |
| CN 205233084 U, 18.05.2016 | |||
| CN 203608667 U, 28.05.2014 | |||
| DE 4444508 C1, 29.02.1996. | |||
