СП
00
00 00 00
р
один цикл кормления с учетом его влажности и привесов животных определяют требуемый расход воды на промежутке межд кормлениями с помощью блока 11. Регулирование подачи воды в канале ведут по
сигналу рассогласования между общим расходом, определяемым интегратором 9, и требуемым от блока 11. Регулирование осуществляют посредством регулятора расхода 10. 2 с.п. ф-лы, 3 з.п. ф-лы, 5 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ВЫРАЩИВАНИЯ ПТИЦЫ | 2007 |
|
RU2340172C1 |
| Система навозоудаления для беспривязного содержания животных и способ управления процессом навозоудаления в животноводческом помещении | 2022 |
|
RU2797384C1 |
| Устройство для нормированной раздачи жидкого корма | 1988 |
|
SU1606062A1 |
| УСТРОЙСТВО ЭКОНОМИЧЕСКИ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ И ЗАВЕРШЕНИЯ ПРОЦЕССА КОРМЛЕНИЯ ПРИ ВЫРАЩИВАНИИ ЖИВОТНЫХ И ПТИЦЫ | 2014 |
|
RU2572537C1 |
| Устройство для удаления жидкого навоза | 1987 |
|
SU1464979A1 |
| Способ и устройство технологически и экономически оптимального озонирования движущихся сыпучих кормов для животноводства и птицеводства | 2015 |
|
RU2608532C2 |
| Способ и устройство обеззараживания наносекундными электрическими импульсами сыпучих кормов для животноводства и птицеводства | 2017 |
|
RU2671390C1 |
| Устройство для раздачи жидкого корма | 1988 |
|
SU1655406A1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ЭКОНОМИЧЕСКИ И ТЕХНОЛОГИЧЕСКИ ОПТИМАЛЬНЫХ МОМЕНТОВ ВРЕМЕНИ ЗАМЕНЫ РЕЖИМА КОРМЛЕНИЯ ЖИВОТНЫХ ИЛИ ПТИЦЫ ВВОЛЮ НА РЕЖИМ ИХ ДОЗИРОВАННОГО ОГРАНИЧЕННОГО КОРМЛЕНИЯ | 2014 |
|
RU2605071C2 |
| СПОСОБ И УСТРОЙСТВО ЭКОНОМИЧНОГО ОБОГРЕВА И КОРМЛЕНИЯ ЖИВОТНЫХ И ПТИЦЫ | 2005 |
|
RU2301521C1 |
Изобретение относится к сельскому хозяйству, к области промышленного животноводства. Цель изобретения - повышение эксплуатационной надежности и точности управления. Изобретение позволяет повысить эффективность навозоудаления за счет управления влагосодержанием навозной массы. Изобретение предусматривает измерение его расхода воды в помещении расходомером 8 и интегратором 9. По расходу корма на один цикл кормления с учетом его влажности и привесов животных определяют требуемый расход воды на промежутке между кормлениями с помощью блока 11. Регулирование подачи воды в канале ведут по сигналу рассогласования между общим расходом, определяемым интегратором 9, и требуемым от блока 11. Регулирование осуществляют посредством регулятора расхода 10. 2 с.п. ф-лы, 3 з.п. ф-лы. 5 ил.
Изобретение относится к сельскому хо зяйству, а именно к животноводству на промышленной основе.
Целью изобретения является повышение эксплуатационной надежности и точности управления путем сокращения расхода воды, подаваемой из напорного трубопровода.
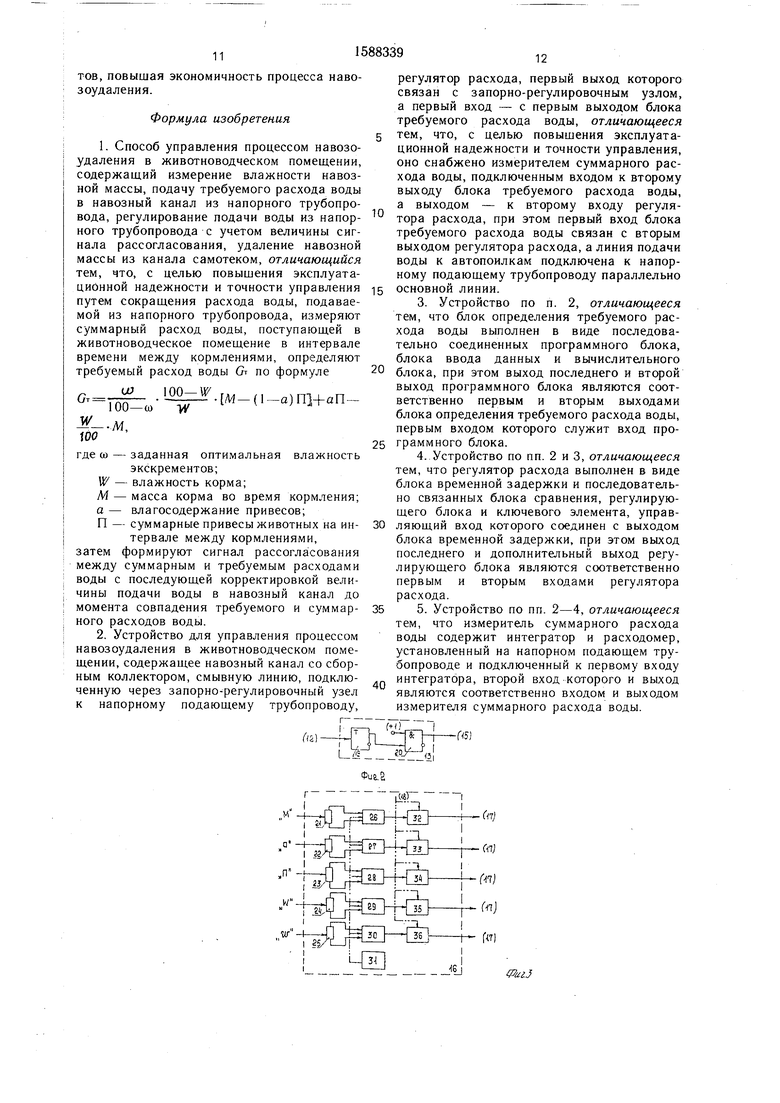
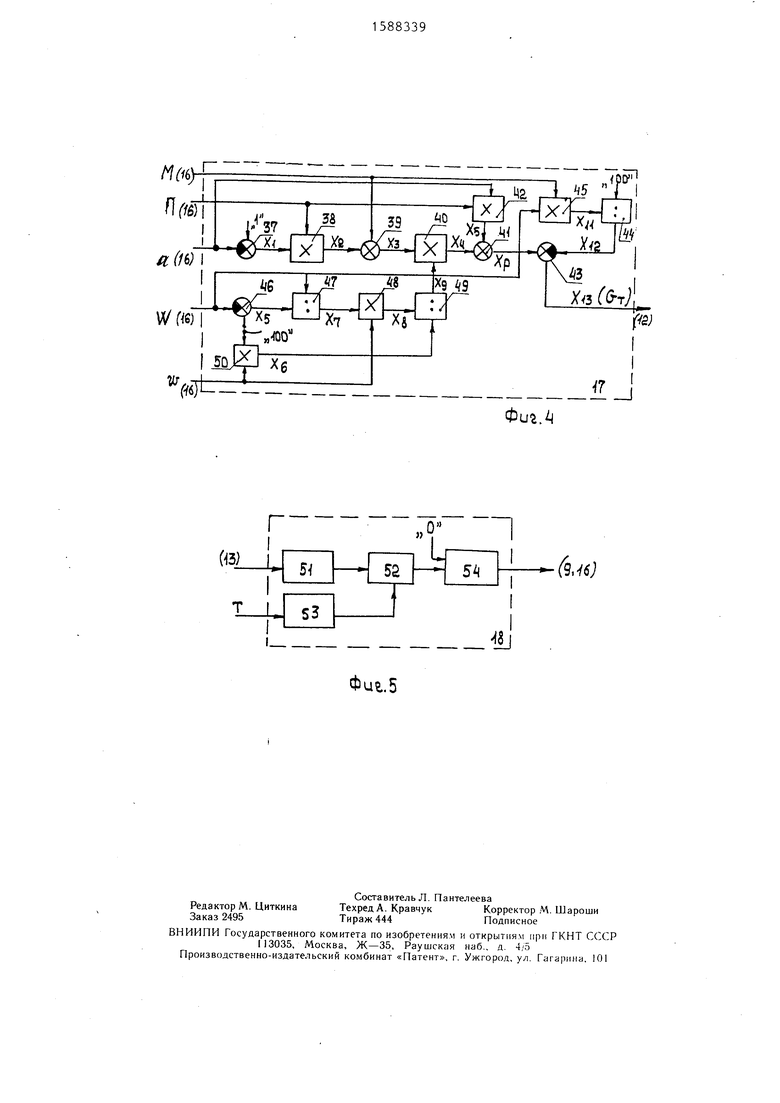
На фиг. 1 представлена блок-схема устройства; на фиг. 2 - блок-схема регулирующего блока; на фиг. 3 -- блок-схема блока ввода данных; на фиг. 4 -- блок-схема вычислительного блока; на фиг. 5 - блок- схема программного блока.
Способ управления процессом навозо- удаления содержит измерение влажности навозной массы, подачу требуемого расхода воды в навозный канал из напорного трубопровода, регулирование подачи воды из напорного трубопровода с учетом величины сигнала рассогласования, удаление навозной массы из канала самотеком.
Суммарный расход воды, поступающей в животноводческое помещение, измеряют в интервале времени между кормлениями Требуемый расход воды определяют формуле
100-Wr
GT
о
100--(о
И/
М-(1-а)П +аП-по
100
где GT - требуемый расход; W - влажность норма; П - суммарные привесы животных на
интервале между кормлениями; а - влагосодержание привесов; Д4 - масса корма во время кормления; ш - заданная оптимальная влажность
экскрементов.
Сигнал рассогласования формируют между суммарным и требуемым расходами воды с последующей корректировкой величины подачи воды в навозный канал до момента совпадения требуемого и суммарного расходов.
Пример реализации способа для свинар- ника по откорму 600 голов молодняка на третьем месяце откорма. Вводимые данные:
ожидаемый привес ,65Х600 390 кг влагосодержание привесов ,62; масса корма ,ЗХ600 3780 кг; относительная влажность корма W
85%;
требуемая относительная влажность навозной массы а)90%.
Измеряют суммарный расход воды, поступающей в помещение на интервале времени между предыдущим и текущим кормлением (например, кг).
Определяют требуемый расход воды по формуле (1):
кг.
Определяют сигнал рассогласования -G:
е 1931 - кг.
Указанное количество воды добавляется при включении смывной системы.
Если измеренный расход G больше требуемого расхода От 1931 кг, то на текущем интервале времени между кормлениями смывная система не включается совсем.
Расчетная формула для определения требуемого расхода воды основана на уравнениях баланса влаги
Q
35
Giip - и сухого вещества тк-Шуе-ш 0.
(2)
(3)
где Giip - общий приток влаги в помещении;
GOT - отток влаги из помещения;
тк - масса сухого вещества в кормах;
ус - доля сухого вещества, усваиваемая в привесах;
щ - то же в навозной массе.
В общий приток влаги Gnp входят три компоненты - влага кормов GK, смывная вода GCM и жидкая фаза экскрементов животных Оэ:
Gnp GK -|- Gcw -{- G i .
(4)
Без учета вентиляционных потерь основной I компонентой оттока влаги из помещения является влага навозной массы, т.е. ,,.
Баланс влаги (2) обеспечивается путем изменения расхода смывной влаги GCM при условии равенства относительной влажности навозной массы известному оптимальному значению ш.
Представим уравнение баланса влаги (2) с учетом (4):
GCM -{-Оэ СкGK ,
(5)
учтем в обеих частях расход влаги, усваиваемой в привесах животных Gyc:
GCM Опт (7iiGK -f- Gyc ,
(6)
где Gm-G + GC - расход питьевой воды, представляющий сумму жидкой фазы экскрементов и усваиваемой влаги в привесах. В левой части (6) имеет общий расход воды, измеряемый расходомером в трубопроводе, т.е.
10
-j-Gnr,
(7)
Этот расход должен выбираться из условия баланса и равенства относительной влажности требуемому значению со, т.е.
((O)-GK + Gyc
Расход влаги в навозной массе Q, (со) определяется из общего выражения для относительной влажности
rf Г, - 00%;
GH(a3)-|-m
GH (со) :
W
100-со
т.
(9)
(10)
а для сухого вещества в навозной массе т определяется по общей массе корма М с учетом усвоения его в привесах:
100-Г ...
((11)
При этом для усваиваемого сухого вещества туе может быть определена через величину ожидаемых привесов П и их влагосодер- жание (2):
myc(l-а) -П.
Таким же образом определяется и усваиваемая в привесах влага:
.
Наконец, влага, поступающая с кормами, определяется через их относительную влаж- ность:
г W лд
GK - -Л.
Окончательно, подставляя все компоненты в (1), получим выражение для требуемого общего расхода воды
.Ш.Гл,-„-„,
100-СО ХМ+аП.
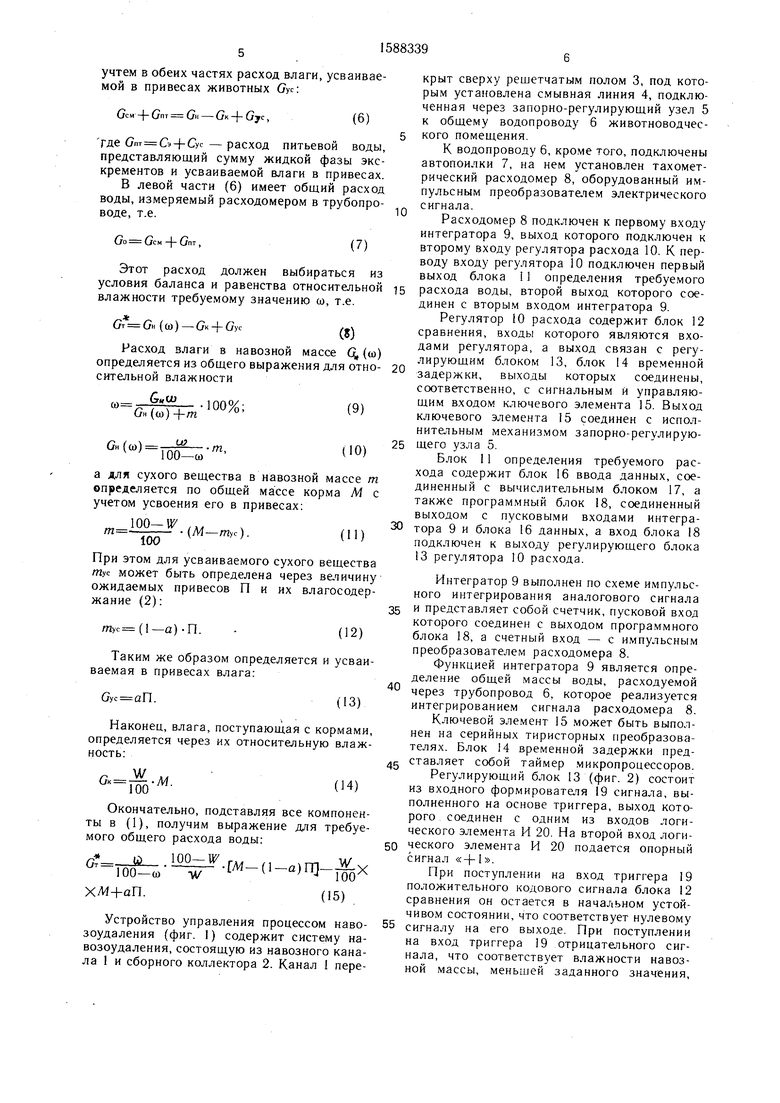
Устройство управления процессом наво- зоудаления (фиг. 1) содержит систему на- возоудаления, состоящую из навозного канала 1 и сборного коллектора 2. Канал 1 перекрыт сверху рещетчатым полом 3, под которым установлена смывная линия 4, подключенная через запорно-регулирующий узел 5 к общему водопроводу 6 животноводчес- 5 кого помещения.
К водопроводу 6, кроме того, подключены автопоилки 7, на нем установлен тахомет- рический расходомер 8, оборудованный импульсным преобразователем электрического сигнала.
Расходомер 8 подключен к первому входу интегратора 9, выход которого подключен к второму входу регулятора расхода 10. К пер- воду входу регулятора 10 подключен первый выход блока 1 определения требуемого 15 расхода воды, второй выход которого соединен с вторы.м входом интегратора 9.
Регулятор 10 расхода содержит блок 12 (5)сравнения, входы которого являются входами регулятора, а выход связан с регу- лирующнм блоком 13, блок 14 временной задержки, выходы которых соединены, соответственно, с сигнальным и управляющим входом ключевого элемента 15. Выход ключевого элемента 15 соединен с испол- ните тьным механизмом запорно-регулирую- 25 щего узла 5.
Блок 11 определения требуемого расхода содержит блок 16 ввода данных, соединенный с вычислительным блоком 17, а также программный блок 18, соединенн ый выходом с пусковыми входами интегра- 30 тора 9 и блока 16 данных, а вход блока 18 подключен к выходу регулирующего блока 13 регулятора 10 расхода.
Интегратор 9 выполнен по схеме импульсного интегрирования аналогового сигнала 35 и представляет собой счетчик, пусковой вход которого соединен с выходом программного блока 18, а счетный вход - с импульсным преобразователем расходомера 8.
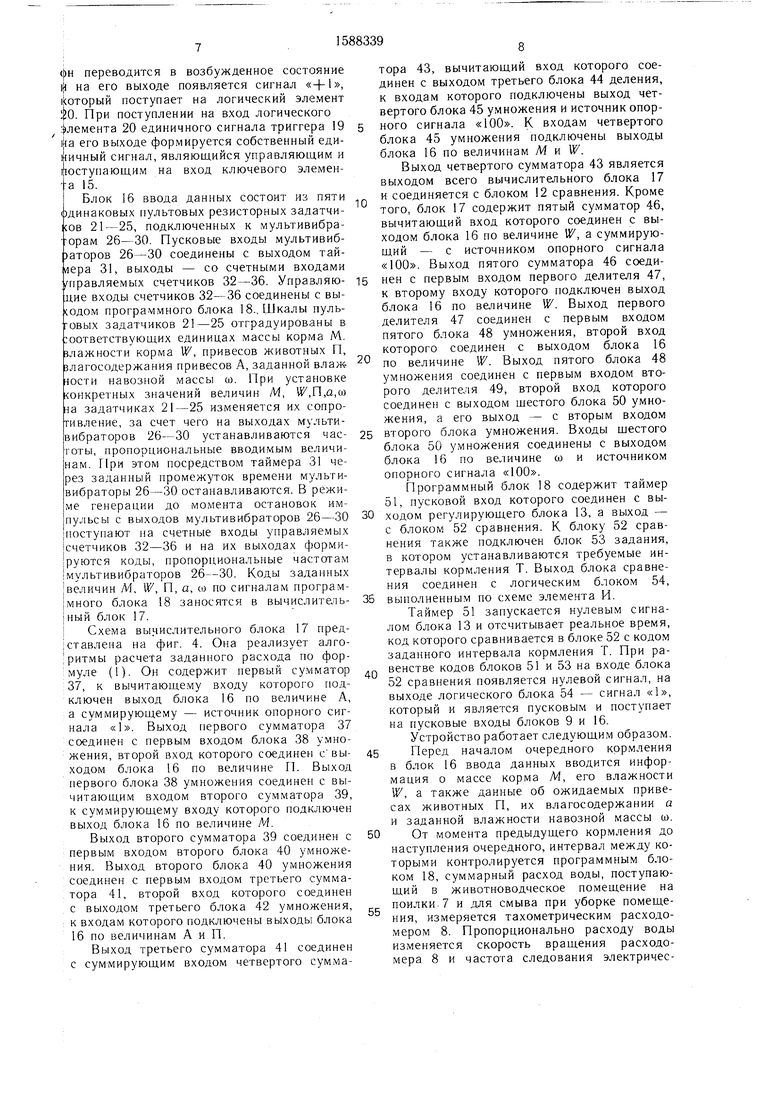
Функцией интегратора 9 является опре- деление общей массы воды, расходуемой через трубопровод 6, которое реализуется интегрированием сигнала расходомера 8. Ключевой элемент 15 может быть выполнен на серийных тиристорных преобразователях. Блок 14 временной задержки пред- 45 ставляет собой таймер микропроцессоров Регулирующий блок 13 (фиг. 2) состоит из входного формирователя 19 сигнала, выполненного на основе триггера, выход которого соединен с одним из входов логического элемента И 20. На второй вход логи- 50 ческого элемента И 20 подается опорный сигнал «+1.
При поступлении на вход триггера 19 положительного кодового сигнала блока 12 сравнения он остается в начальном устойчивом состоянии, что соответствует нулевому ЬЬ сигналу на его выходе. При поступлении на вход триггера 19 отрицательного сигнала, что соответствует влажности навозной массы, меньшей заданного значения.
12)
(13)
(14)
100 (15)
(6)
10
15
фн переводится в возбужденное состояние на его выходе появляется сигнал «-|-1, ikoTOpbiH поступает на логический элемент |о. При поступлении на вход логического :)лемента 20 единичного сигнала триггера 19 liia его выходе формируется собственный еди- |1ичный сигнал, являющийся управляюидим и Поступающим на вход ключевого элемен- ja 15.
I Блок 16 ввода данных состоит из пяти одинаковых пультовых резисторных задатчи- :сов 21-25, подключенных к мультивибра- орам 26-30. Пусковые входы мультивиб- )аторов 26-30 соединены с выходом тай- лера 31, выходы - со счетными входами (вправляемых счетчиков 32-36. Управляю- дие входы счетчиков 32-36 соединены с вы- юдом программного блока 18., Шкалы пуль- овых задатчиков 21-25 отградуированы в юответствующих единицах массы корма М. злажности корма W, привесов животных П, злагосодержания привесов А, заданной влаж ности навозной массы ш. При установке онкретных значений величин М, W,U,a,(a -la задатчиках 21-25 изменяется их сопро- п-явление, за счет чего на выходах лтульти- |вибраторов 26-30 устанавливаются час- |готы, пропорциональнь е вводимым величи- 1нам. При этом посредством таймера 31 через заданный промежуток времени мультивибраторы 26-30 останавливаются. В режи- |ме генерации до момента остановок импульсы с выходов мультивибраторов 26-30 |поступают па счетные входы управляемых |счетчиков 32-36 и на их выходах форми- |руются коды, пропорциональные частотам Iмультивибраторов 26-30. Коды задан ых величин Л1, W, П, а, со по сигналам програм- (много блока 18 заносятся в вычислитель- |ный блок 17.
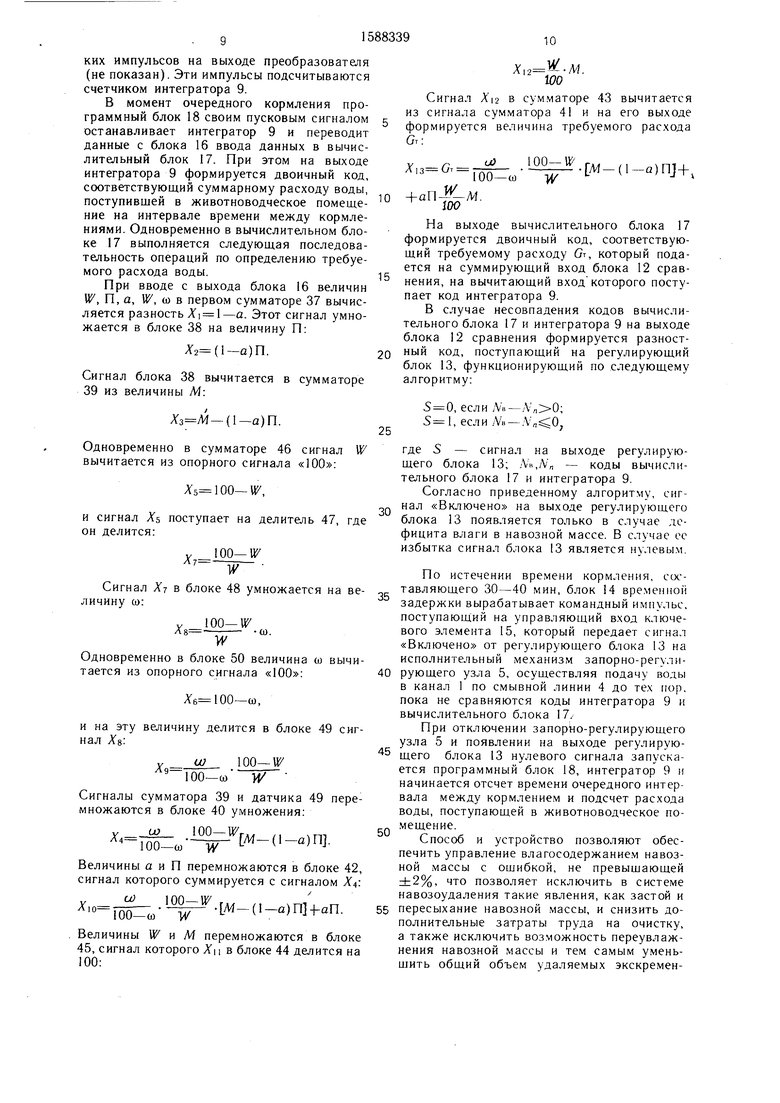
I Схема вычислительного блока 17 пред- :ставлена на фиг. 4. Она реализует алго- ;ритмы расчета заданного расхода по фор- : муле (1). Он содержит первый cy.viMaTOp 37, к вычитающему входу которого подключен выход блока 16 по величине А, а суммирующему - источник опорного сигнала «1. Выход первого сумматора 37 соединен с первым входом блока 38 умножения, второй вход которого соединен с выходом блока 16 по величине П. Выход первого блока 38 умножения соединен с вычитающим входом второго сумматора 39, к суммирующему входу которого подключен выход блока 16 по величине М.
Выход второго сумматора 39 соединен с первым входом второго блока 40 умножения. Выход второго блока 40 умножения соединен с первым входом третьего сумматора 41, второй вход которого соединен с выходом третьего блока 42 умножения, к входам которого подключены выходы блока 16 по величинам А и П.
Выход третьего сумматора 41 соединен с суммирующим входом четвертого сумматора 43, вычитающий вход которого соединен с выходом третьего блока 44 деления, к входам которого подключены выход четвертого блока 45 умножения и источник опор- ного сигнала «100. К входам четвертого блока 45 умножения подключены выходы блока 16 по величинам М и W.
Выход четвертого сумматора 43 является выходом всего вычислительного блока 17 и соединяется с блоком 12 сравнения. Кроме того, блок 17 содержит пятый сумматор 46, вычитающий вход которого соединен с выходом блока 16 по величине W, а суммирующий - с источником опорного сигнала «100. Выход пятого сумматора 46 соеди- 5 нен с первым входом первого делителя 47, к второму входу которого подключен выход блока 16 по веоичине W. Выход первого делителя 47 соединен с первым входом пятого блока 48 умножения, второй вход которого соединен с выходом блока 16 0 по величине W. Выход пятого блока 48 умножения соединен с первым входом второго делителя 49, второй вход которого соединен с выходом щестого блока 50 умножения, а его выход - с вторым входом 5 второго блока умножения. Входы щестого блока 50 умножения соединены с выходом блока 16 по величине со и источником опорного сигнала «100.
Программный блок 18 содержит таймер 51, пусковой вход которого соединен с вы- 30 ходом регулирующего блока 13, а выход - с блоком 52 сравнения. К блоку 52 сравнения также подключен блок 53 задания, в котором устанавливаются требуемые интервалы кор мления Т. Выход блока сравнения соединен с логическим блоком 54, 35 выполненным по схеме элемента И.
Таймер 51 запускается нулевым сигналом блока 13 и отсчитывает реальное время, код которого сравнивается в блоке 52 с кодом заданного интервала кормления Т. При равенстве кодов блоков 51 и 53 на входе блока 52 сравнения появляется нулевой сигнал, на выходе логического блока 54 - сигнал «1, который и является пусковым и поступает на пусковые входы блоков 9 и 16.
Устройство работает следующим образом. 45 Перед началом очередного кормления в блок 16 ввода данных вводится информация о массе корма М, его влажности W, а также данные об ожидаемых привесах животных П, их влагосодержании а и заданной влажности навозной массы ш. 50 От момента предыдущего кормления до наступления очередного, интервал между которыми контролируется программным блоком 18, суммарный расход воды, поступающий в животноводческое помещение на поилки. 7 и для смыва при уборке помеще- ния, измеряется тахометрическим расходомером 8. Пропорционально расходу воды изменяется скорость вращения расходомера 8 и частота следования электричес40
ких импульсов на выходе преобразователя (не показан). Эти импульсы подсчитываются счетчиком интегратора 9.
В момент очередного кормления программный блок 18 своим пусковым сигналом останавливает интегратор 9 и переводит данные с блока 16 ввода данных в вычислительный блок 17. При этом на выходе интегратора 9 формируется двоичный код, соответствующий суммарному расходу воды, поступившей в животноводческое помеще- ние на интервале времени между кормлениями. Одновременно в вычислительном блоке 17 выполняется следующая последовательность операций по определению требуемого расхода воды.При вводе с выхода блока 16 величин W, П, а, W, ш ъ первом сумматоре 37 вычисляется разность A i l-а. Этот сигнал умножается в блоке 38 на величину П:
Х2(1--а)П.
Сигнал блока 38 вычитается в сумматоре 39 из величины М:
()П.
Одновременно в сумматоре 46 сигнал W вычитается из опорного сигнала
,
И сигнал 5 поступает на делитель 47, где он делится:
100-Г W
Сигнал Xj в блоке 48 умножается на величину со:у 100-Г ;г, .,.
Одновременно в блоке 50 величина ш вычитается из опорного сигнала
Л-6 100-ш,
и на эту величину делится в блоке 49 сигнал XB:
-0
W
100-0) И/
Сигналы сумматора 39 и датчика 49 перемножаются в блоке 40 умножения:
U)
100-Гг
( --)П Величины а и П перемножаются в блоке 42, сигнал которого суммируется с сигналом Х4:
f 100-Г 100-о TV
10
(1-а).
Величины W и М перемножаются в блоке 45, сигнал которого Х в блоке 44 делится на 100:
с10
х,,.м. юо
Сигнал А |2 в сумматоре 43 вычитается из сигнала сумматора 41 и на его выходе формируется величина требуемого расхода GT:
0
с OQ
0
5
0
oJ
100-ы
100-W- W
1М-(-а)Г +
5
5
.
На выходе вычислите тьного блока 17 формируется двоичный код, соответствующий требуемому расходу GT, который подается на суммирующий вход блока 12 сравнения, на вычитающий вход которого поступает код интегратора 9.
В случае несовпадения кодов вычислительного блока 17 и интегратора 9 на выходе блока 12 сравнения формируется разностный код, поступающий на регулирующий блок 13, функционирующий по следующему алгоритму:
, если Л в-Л „ 0; , если Л в -.,
где S - сигнал на выходе регулирующего блока 13; .л, - коды вычислительного блока 17 и интегратора 9.
Согласно приведенному алгоритму, сигнал «Включено на выходе регулирующего блока 13 появляется только в случае дефицита влаги в навозной массе. В случае ее избытка сигнал блока 13 является нулевым.
По истечении времени кормления, сос-- тавляющего 30-40 мин, блок 14 временной задержки вырабатывает командный импульс, поступающий на управляющий вход ключевого элемента 15, который передает сигнал «Включено от регулирующего блока 13 на исполнительный механизм запорно-регули- рующего узла 5, осуществляя подачу воды в канал 1 по смывной линии 4 до тех нор, пока не сравняются коды интегратора 9 и вычислительного блока 17.
При отключении запорно-регулирующего узла 5 и появлении на выходе регулирующего блока 13 нулевого сигнала запускается программный блок 18, интегратор 9 и начинается отсчет времени очередного интервала между кормлением и подсчет расхода воды, поступающей в животноводческое помещение.
Способ и устройство позволяют обеспечить управление влагосодержанием навозной массы с ощибкой, не превышающей ±2%, что позволяет исключить в системе навозоудаления такие явления, как застой и пересыхание навозной массы, и снизить дополнительные затраты труда на очистку, а также исключить возможность переувлажнения навозной массы и тем самым уменьшить общий объем удаляемых экскрементов, повышая экономичность процесса наво- зоудаления.
Формула изобретения
0..Ш-,.
-.УИ, WO
где со - заданная оптимальная влажность экскрементов;
W - влажность корма;
М - масса корма во время кормления;
а - влагосодержание привесов;
П - суммарные привесы животных на интервале между кормлениями, затем формируют сигнал рассогла1сования между суммарным и требуемым расходами воды с последующей корректировкой величины подачи воды в навозный канал до момента совпадения требуемого и суммарного расходов воды.
W
isOsQD-Ei..
0
регулятор расхода, первый выход которого связан с запорно-регулировочным узлом, а первый вход - с первым выходом блока требуемого расхода воды, отличающееся тем, что, с целью повышения эксплуатационной надежности и точности управления, оно снабжено измерителем суммарного расхода воды, подключенным входом к второму выходу блока требуемого расхода воды, а выходом - к второму входу регулятора расхода, при этом первый вход блока требуемого расхода воды связан с вторым выходом регулятора расхода, а линия подачи воды к автопоилкам подключена к напорному подающему трубопроводу параллельно основной линии.
0 блока, при этом выход последнего и второй выход программного блока являются соответственно первым и вторым выходами блока определения требуемого расхода воды, первым входом которого служит вход про5 граммного блока.
5 5. Устройство по пп. 2-4, отличающееся тем, что измеритель суммарного расхода воды содержит интегратор и расходомер, установленный на напорном подающем трубопроводе и подключенный к первому входу
р. интегратора, второй вход которого и выход являются соответственно входом и выходом измерителя суммарного расхода воды.
alJ
Г
Фиг.5
Фиг.Ц
,0
П
| Устройство для удаления навоза | 1979 |
|
SU791350A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство удаления экскрементов изжиВОТНОВОдчЕСКиХ пОМЕщЕНий | 1979 |
|
SU843879A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
