Изобретение относится к области авиации в отрасли вертолетостроения, авиационной технике, а именно к конструкциям вертолетов способных садиться и взлетать с водной поверхности, предназначенных для тушения пожаров, выполнения спасательных операций на суше и воде, транспортировки крупногабаритных грузов вне грузовой кабины при жестком креплении их в подфюзеляжном пространстве между стоек шасси или свободно закрепленных на внешней тросовой подвеске, служащих для выполнения монтажных погрузо-разгрузочных работ, транспортировки грузов.
Известны вертолеты с кабиной экипажа, грузопассажирской кабиной и с низким шасси, оснащенные дополнительной кабиной пилота-оператора и дублирующей системой управления вертолетом, предназначенные только для транспортировки грузов на внешней подвеске.
Например, известна конструкция вертолета для монтажно-крановых работ (Патент РФ №2070141, кл. В64С 27/00, 1993), где дополнительная кабина с дублирующей системой управления вертолетом закреплена сбоку фюзеляжа на узлах подвески двери, а место пилота-оператора расположено против полета. Известно решение вертолета для краново-монтажных работ на внешней подвеске (Патент РФ на промышленный образец №41076, кл. 12-07, 1993) с дополнительной кабиной для пилота-оператора в хвостовой части вертолета (позади грузопассажирской кабины) и с расположением места пилота-оператора по полету.
Вертолет Ми-10К (см. кн. Изаксон A.M. «Советское вертолетостроение», «Машиностроение», 1981, с. 220-221) имеет низкое четырехстоечное шасси, а в его носовой части снизу установлена дополнительная подвесная кабина с третьим управлением. Летчик, находящийся в нижней кабине, обращен лицом к хвостовой части вертолета. Дополнительная кабина предназначена для пилотирования вертолета при выполнении специальных монтажных и погрузочно-разгрузочных работ.
Известны конструкции вертолетов, предназначенных как для транспортировки крупногабаритных грузов, жестко закрепленных в подфюзеляжном пространстве между стойками шасси, которые выполнены высокими, так и для грузов, свободно закрепленных на внешней тросовой подвеске в центральной части фюзеляжа.
Например, известна конструкция вертолета Ми-10 (без дополнительной кабины пилота-оператора), имеющего высокое четырехстоечное шасси и снабженного телевизионной установкой, экран которой находится в кабине пилотов, предназначенной для упрощения операций, связанных с «наруливанием» вертолета на груз (Изаксон A.M. «Советское вертолетостроение», «Машиностроение», 1981, с. 218-221). Центральная часть фюзеляжей вертолетов Ми-10 и Ми-10К служит грузовой кабиной.
Известен (наиболее близкий по конструкции к заявляемому) вертолет-кран S-64 фирмы Сикорский, разработанный в 1962 году (Jane's, HELICOPTER MARKETS AND SYSTEMS, 2001, p. 366), который не имеет грузовой кабины в центральной части фюзеляжа и имеет трехстоечное шасси с низкой передней опорой под кабиной и двумя высокими задними опорами, закрепленными на пилонах. При этом два места пилотов расположены в передней части кабины, а обращенное назад третье рабочее место пилота-оператора расположено в задней части кабины и снабжено дублирующей системой управления.
Подфюзеляжное пространство здесь организовано за счет отсутствия грузовой кабины и расположено сразу за кабиной экипажа, благодаря чему груз в подфюзеляжном пространстве расположен ближе к центру тяжести вертолета. Это улучшает устойчивость и облегчает управление вертолета с грузом.
Аналогом заявляемого изобретения является американский вертолет «Чинук», оснащенный двумя несущими винтами, выполненный по продольной схеме таким образом, что задний несущий винт возвышается над передним на некоторую высоту и силовая установка, состоящая из двух двигателей, расположена на пилонах в задней части фюзеляжа непосредственно под задним несущим винтом.
Недостатком этой конструкции по отношению к заявляемому вертолету является то, что оба несущих винта обладают сравнительно низким коэффициентом подъемной силы и во время полета происходит «затенение» верхним винтом нижнего, что ведет к снижению подъемной силы нижнего винта.
Аналогом заявляемого изобретения является также двухвинтовой легкий вертолет с высокоэффективными несущими винтами и стабилизаторной системой управления по патенту RU 2584958, МПК В64С 27/32, В64С 27/08. Двухвинтовой легкий вертолет содержит фюзеляж с хвостовой балкой, несущие винты. Второй несущий винт расположен на хвостовой балке, вращающийся в противоположную сторону относительного первого переднего несущего винта. Помимо этого у этого вертолета несущие винты установлены в одной горизонтальной плоскости и оси их вращения максимально приближены к друг другу. Трансмиссия этого вертолета выполнена так, что когда лопасти одного из винтов находятся продольно фюзеляжу, то продольная ось лопастей другого винта находится под углом 90 градусов относительно продольной оси лопастей другого винта. Нет затенения переднего несущего винта, и вертолет становится очень компактным.
Недостатком этой конструкции по отношению к заявляемому вертолету является то, что он обладает малой энерговооруженностью и как следствие малой грузоподъемностью. Стабилизаторная система управления обуславливает низкую управляемость из-за отсутствия рулевого винта.
Известен, вертолет В-12 производства МВЗ им. М.Л. Миля, выполненный по поперечной схеме, оснащенный двумя несущими винтами, газотурбинными двигателями, фюзеляжем, шасси (Н.В. Якубович, Вертолеты особых схем, Москва, Астрель, ACT, 2002, стр. 116-126). Недостатком этой конструкции по отношению к заявляемому вертолету является то, что у вертолета поперечной схемы диапазон продольной центровки намного меньше, чем у заявляемого вертолета, что является важным для вертолета, транспортирующего большой груз, например две гидроемкости. Вертолет В-12 не обладает возможностью тушить промышленные и лесные пожары.
В настоящее время для тушения лесных пожаров МЧС используются самолеты-амфибии Бе-200, самолет Ил-76, вертолеты Ка-32, Ми-26 и другие. Самолет-амфибия Бе-200 для забора воды требует больших водных акваторий. Забор воды он производит в полете над водой на режиме глиссирования, забор воды ограничивается высотой волны до 2-х баллов и погодными условиями. Это снижает его эффективность.
Самолет Ил-76 является тяжелым грузовым четырехмоторным самолетом, не предназначенным для тушения пожаров. Вертолеты Ка-32, Ми-26 не специализированы для тушения пожаров, они берут небольшое количество воды, не более 3-х т, на внешние подвески и сбрасывают воду в место пожара залпом. Источники информации:
1) Энциклопедия " Авиация ", издательство ЦАГИ 6, Москва, 1994 г.
2) "Гидросамолеты и экранопланы", издательство "Русавиация", Москва. 2000 г., авт. Г.Ф. Петров.
В настоящее время нет эффективных специализированных, высокопроизводительных летательных аппаратов для тушения пожаров с воздуха, особенно при тушении высотных зданий и технологического оборудования.
В качестве прототипа выбран сверхтяжелый четырехвинтовой многоцелевой вертолет по патенту RU 2701369, МПК В64С 27/08. Сверхтяжелый четырехвинтовой многоцелевой вертолет содержит четыре восьми лопастных несущих винта, работающих от восьми газотурбинных двигателей большой мощности, восьми муфт свободного хода, двух основных редукторов для передачи крутящих моментов. Вертолет также снабжен гидронасосом, четырехствольным турельным гидромонитором, двумя гидроемкостями, четырехстоечным шестнадцати колесным шасси. Колеса передних стоек шасси выполнены самоориентирующимися. Фюзеляж выполнен с технологической полостью для топливных баков, правых и левых лебедок с червячными редукторами для опускания, поворота и подъема гидроемкостей. Для перевозки тяжелой техники гидроемкости снимаются, а между центральными, носовыми и хвостовыми шпангоутами фюзеляжа устанавливается грузовой пол.
Недостатком этой конструкции по отношению к заявляемому вертолету-крану является в 2 раза большее количество приводных высокомощных газотурбинных двигателей, такое же количество муфт свободного хода, необходимость снимать гидроемкости для заполнения водой. Большое количество валов трансмиссии, муфт, редукторов для привода несущих винтов, которые разнесены на большое расстояние, обуславливает высокую вибрацию вертолета. Основным недостатком прототипа является низкая управляемость вертолета, что не позволяет выполнять высокоточные монтажные работы. Из-за наличия четырех несущих винтов, далеко разнесенных друг от друга на пилонах и фермах, вертолет имеет низкое аэродинамическое качество. Даже в режиме висения необходимо управление несущими винтами по особому алгоритму. На земле при рулении вертолета необходимо затрачивать топливо при работе высокомощных газотурбинных двигателей или использовать тягачи для перемещения вертолета по твердой поверхности. Отсутствие управляемости на земле не позволяет быстро осуществлять погрузо-разгрузочные мероприятия. Недостатком является высокое расположение центра масс вертолета, поскольку высокомощные газотурбинные двигатели расположены в верхней части фюзеляжа вертолета. При наличии подвесной гидроемкости, центр масс которой располагается ниже центра масс вертолета, с переменным расходом жидкости выявляются сложности с обеспечением продольной центровки. При понижении уровня жидкости в гидроемкости она может перетекать вдоль гидроемкости при выполнении управляющих маневров, что вызывает раскачивание вертолета и снижает безопасность полета. Недостатком является наличие лебедок только для опускания, подъема и поворота гидроемкостей. Необходимость опускать гидроемкости и изменять их положение при наборе воды из водоема, что создает опасную ситуацию из-за быстрого увеличения веса гидроемкости висящей на тросах.
Задачей предлагаемого изобретения является создание безопасного, надежного вертолета:
- повышение аэродинамического качества вертолета-крана;
- повышение безопасности полета с грузом и при выполнении монтажных работ;
- улучшение путевого управления и управляемости полета на всех режимах;
- повышение путевой скорости;
- уменьшение габаритных размеров и веса вертолета-крана;
- снижение вибрации несущих винтов и фюзеляжа;
- снижение вибрационной нагрузки на экипаж вертолета;
- осуществление изменения направления вектора тяги рулевых винтов для улучшения путевого управления и управляемости вертолета-крана на всех режимах полета и в режиме висения;
- упрощение управления при полете в режиме с продольным расположением несущих винтов;
- обеспечение полета и улучшение управляемости при переходе в режим поперечного расположения несущих винтов;
- обеспечение полета и управляемости в режиме продольно-поперечного расположения несущих винтов;
- увеличение диапазона продольной и поперечной центровки вертолета-крана, приближение центра масс груза к центру масс вертолета-крана;
- обеспечение возможности контролируемого изменения положения центра тяжести вертолета-крана с грузом на внешней подвеске;
- обеспечение высокой точности при выполнении строительно-монтажных работ и тушении пожаров, повышения безопасности при выполнении работ;
- обеспечение быстрого демонтажа и монтажа кабин экипажа и крановщиков, бензобаков, технологического оборудования для расширения функциональных возможностей вертолета;
- обеспечение возможности осуществлять посадку на водную поверхность, передвижения по воде с последующим взлетом;
- обеспечение высокой остойчивости и снижение энергетических затрат при взлете с водной поверхности;
- снижения энергетических затрат при рулении на земле, передвижения по водной поверхности и при эксплуатации на всех режимах полета.
Техническим результатом предлагаемого изобретения является: повышение аэородинамического качества вертолета, управляемости на всех режимах полета и висения, упрощение управления несущими винтами, снижение вибрационной нагрузки на экипаж вертолета, возможность движения с продольной или поперечной схемой расположения несущих винтов, на всех режимах полета и в режиме висения, увеличение диапазона продольной и поперечной центровки вертолета, максимальное приближение центра масс груза к центру масс вертолета при его расположении в технологической нише вертолета, реализация контролируемого перемещения центра масс вертолета при транспортировке груза и выполнении монтажных работ, увеличение управляемости вертолета по курсу и в режиме висения при тушении пожаров и обеспечения высокоточного тушения пожаров, повышение точности монтажа тяжелого технологического оборудования, снижение затрат топлива при рулении вертолета и выполнении погрузо-разгрузочных работ, снижение затрат топлива при передвижении по водной поверхности, снижения времени выполнения технологических монтажных работ, снижения энергозатрат при выполнении транспортных и монтажных работ, создание условий эффективного управления для компенсации внешних воздействий на вертолет, упрощения наполнения гидроемкостей водой, обеспечение возможности посадки на воду, забора воды или выполнения спасательных операций, с последующим взлетом, возможность перевозки тяжелой техники без применения грузового пола, уменьшения массы вертолета, упрощения пилотирования и обеспечение высокоточного позиционирования в режиме висения, повышение безопасности полета, обеспечение высокой остойчивости при посадке на воду и снижение энергозатрат при взлете с воды.
Указанная поставленная задача решается за счет того, что в основу проекта пожарного гидровертолета-крана (далее вертолет) положена аэродинамическая схема вертолета с двумя продольно расположенными двигательными установками, с несущими синхронно-вращающимися перекрещивающимися винтами.
Такая схема позволяет увеличить грузоподъемность по сравнению с одновинтовой схемой. Продольная схема обеспечивает высокие тяговые характеристики на вертикальных режимах, что крайне необходимо вертолету при выполнении функции крана.
Дополнительно реализована возможность выполнения полета в режиме вертолета поперечной схемы.
Фюзеляж предполагаемого вертолета разделен на 3 функциональные части и представляет собой симметричную конструкцию относительно центра масс.
Две части представляют собой фюзеляж в виде двух зеркально-расположенных кабин (передняя и задняя), соединенных крановой балкой. Передняя и задняя кабины имеют: стойки шасси, двигательные установки, турбоэлектрогенераторы, редуктора, топливные баки и несущие винты.
Третья часть выполнена в виде узкой крановой балки, соединяющей симметрично-расположенные кабины, выполняющей роль несущей для крановых направляющих с кареткой крановой лебедки. Крановая балка соединяет кабины в верхней части вследствие чего под ней, между кабинами образуется технологическая полость, в которой может размещаться контейнер с грузом, цистерна для воды, грузопассажирский контейнер, крепящиеся к элементам конструкции шасси и элементам фюзеляжа или иное оборудование для транспортировки.
С помощью разъемных крепежных узлов может устанавливаться технологическая грузовая платформа для транспортировки на ней груза.
В кабинах фюзеляжа расположены кабины экипажа (передняя и задняя). Дополнительно имеются кабины крановщиков (передняя и задняя), которые расположены по краям технологической полости фюзеляжа. Рядом с кабинами крановщиков расположены топливные баки.
Внутри крановой балки находится силовой каркас в виде пространственной рамы, которая по краям опускается вниз и обрамляет технологическую полость. Пространственная рама имеет развитую конструкцию для размещения и крепления на амортизаторах кабин экипажа в виде остекленных фюзеляжных конструкций с органами управления, остекленных кабин крановщиков в виде отдельных фюзеляжных конструкций с возможностью прохода в кабины экипажа. Кабины крановщиков крепятся к конструкциям пространственной рамы на амортизаторах.
Крепление кабин экипажа и крановщиков на амортизаторах позволяет снизить вибрационную нагрузку на экипаж и крановщиков. Под кабинами экипажа на конструкциях пространственной рамы находится силовая установка в составе: газотурбинные двигатели, редукторы, турбоэлектрогенераторы.
Силовая установка отделена от кабин экипажа и крановщиков противопожарной перегородкой, а агрегаты крепятся через амортизаторы, что снижает вибрационные нагрузки на экипаж от силовой установки.
Над кабинами экипажа находится часть пространственной силовой рамы, которая несет опорно-упорные подшипники валов привода несущей системы.
Каждая силовая установка состоит из двух спаренных между собой газотурбинных двигателей, соединенных редуктором, и приводящих в действие два синхронно-вращающихся несущих винта.
Рядом с газотурбинными двигателями силовой установки располагаются и турбоэлектрогенераторы, которые снабжают электроэнергией не только бортовые системы электроснабжения вертолета, но и крановые лебедки, маршевые электродвигатели рулевых винтов, системы электроснабжения и управления.
В задней части передней кабины и в передней части задней кабины имеются пилоны, образованные частями пространственной рамы, со стойками четырехточечного управляемого шасси с электроприводом.
Вместо шасси или совместно с шасси имеется возможность смонтировать жесткие поплавки для реализации возможности посадки на воду для забора воды или для выполнения спасательных операций.
Каждая кабина вертолета, снабженная двумя воздушными винтами с приводом от двигателей, установленными симметрично относительно продольной оси фюзеляжа
Каждая силовая установка с редуктором приводит во вращение по два несущих винта жесткой конструкции, которые жестко без шарниров прикреплены к втулке винта с возможностью изменения общего шага винтов как совместно, так и дифференциально.
Валы несущих винтов установлены попарно с развалом валов в 10-20 градусов и жестко связанны редукторами, при этом роторы винтов вращаются синхронно и перекрещиваются.
Схема с перекрещивающимися несущими винтами (синхроптер) (англ.: intermeshing rotor helicopter). У таких вертолетов несущие винты расположены по бокам фюзеляжа, а их оси наклонены наружу.
Достоинством выбранной схемы являются малые габариты, упрощение балансировки вертолета, хорошая способность плавного вертикального подъема груза. Реализована возможность осуществлять полет в любом направлении с продольным или с поперечным расположением несущих винтов.
В средней части крановой балки соединяющей кабины расположены пилоны, перпендикулярно продольной оси крановой балки, на конце которых находится вилочный подвес маршевого электродвигателя с рулевыми винтами изменяемого шага. Размер пилонов позволяет расположить рулевые винты вне зоны дисков несущих винтов. Маршевые электродвигатели имеют возможность поворачиваться на 180 градусов.
Размещение агрегатов силовой установки вертолета, кабин экипажа и крановщиков, топливных баков, технологического оборудования на элементах пространственной рамы позволяет быстро перенастроить вертолет для выполнения различных функций на суше или на воде. Расположение силовой установки в нижней части кабин позволяет снизить стоимость обслуживания, ремонтно-восстановительных работ.
Система управления вертолетом снабжена устройством, изменяющим частоту вращения несущих винтов в передней и задней кабине фюзеляжа. Лопасти закреплены на втулках несущих винтов жестко. Автопилот выполнен с функцией стабилизации горизонтального положения фюзеляжа. Достигается повышение аэродинамического качества вертолета и увеличение максимальной скорости полета.
Система автоматического управления несущими винтами с функцией автопилота дополнена системой автоматического управления рулевыми винтами для стабилизации полета по курсу. Система управления лопастями несущих винтов выполнена в виде командных рычагов в кабинах экипажа, соединенных посредством связей управления с автоматами перекоса и лопастями. Система управления несущих винтов содержит устройство для изменения частоты вращения несущих винтов и взаимодействует с автопилотом с функцией стабилизации горизонтального положения фюзеляжа.
Дополнительно вертолет содержит систему стабилизации по курсу, в которую входят два маршевых электродвигателя, на пилонах в средней части вертолета, приводящих во вращение рулевые винты с изменяемым шагом. Маршевые электродвигатели с рулевыми винтами расположены вне зоны возмущенного воздушного потока от несущих винтов и имеют возможность поворота для изменения направления вектора тяги рулевых винтов.
Система стабилизации по курсу использует рулевые винты с маршевыми электродвигателями в качестве вспомогательной маршевой установки для прямолинейного полета, для высокоточного позиционирования вертолета при выполнении монтажных работ в режиме висения и для компенсации внешних воздействий на вертолет на всех режимах полета.
Система стабилизации по курсу позволяет вертолету осуществлять полет как вертолету с поперечной схемой расположения несущих винтов или с диагональным расположением несущих винтов.
Система стабилизации по курсу взаимодействует с системой управления несущих винтов и автопилотом.
Для выполнения монтажных работ используется система управления контролируемого перемещения центра масс вертолета.
При расположении газотурбинных двигателей силовой установки с редукторами и турбогенераторов в нижней части кабин центр масс вертолета располагается на большом расстоянии от центра приложения подъемной силы несущих винтов, что положительно сказывается на управляемости вертолета в полете и при работе с грузом. При расположении груза в технологической полости фюзеляжа вертолета центр масс вертолета максимально приближен к центру масс груза.
Вся нагрузка от груза приложена к элементам пространственной силовой рамы.
Передняя и задняя части фюзеляжа сбалансированы по массам, поэтому центр масс конструкции вертолета-крана находится на одном расстоянии с центром массы полезного груза. Расход топлива в полете происходит из топливных баков одновременно, чем обеспечивается его центровка на всех режимах полета, с водой при тушении пожаров и без воды.
Дополнительное крепления груза к четырем лебедкам предотвращает раскачивание груза при расположении груза ниже фюзеляжа вертолета.
Основное крепление груза осуществляется выше центра масс вертолета на минимальном расстоянии от центров и линии приложения подъемной силы несущих винтов.
Маршевые электродвигатели получают электропитание от турбогенераторов вертолета, расположены в вилочном подвесе на пилонах и имеют возможность вращения и поворота вокруг вертикальных осей вилочного подвеса.
Рулевые винты расположены во взаимно-противоположных направлениях. При вращении рулевых винтов с одинаковым шагом лопастей в одну сторону они создают вращающий момент для путевого управления и разворота вертолета. Так же рулевые винты имеют механизм автомата перекоса, обеспечивающий создание необходимого направления вектора тяги при движении с поперечной схемой расположения несущих винтов.
Управление вертолетом по курсу в этом режиме осуществляется изменением тяги рулевых винтов с помощью изменения шага рулевого винта или скорости вращения маршевого электродвигателя с рулевым винтом. В маршевом режиме рулевые винты создают вектор тяги одинакового направления. В этом случае маршевые электродвигатели с рулевыми винтами выполняют роль маршевой установки и используются для горизонтального полета.
При повороте маршевых электродвигателей в вилочном подвесе плоскости вращения рулевых винтов остаются параллельны. В маршевом режиме при повороте маршевых электродвигателей на угол 90 градусов происходит перемещение вертолета поперек продольной оси, что используется при выполнении монтажных и погрузочно-разгрузочных работах. Маршевые электродвигатели вращаются на 180 градусов, что позволяет иметь управляемость вертолета в диапазоне 360 градусов при горизонтальном полете или в режиме висения.
Отсутствие кинематической связи маршевых электродвигателей, установленных на пилонах, с основной силовой установкой позволяет снизить вес, снизить вибрации из-за отсутствия трансмиссии, расширить функциональные и эксплуатационные возможности вертолета, обеспечить безопасность. Возможность поворота маршевых электродвигателей с рулевыми винтами изменяемого шага позволяет существенно увеличить управляемость в полете и повысить точность управления и позиционирования вертолета при выполнении монтажных работ без изменения высоты полета, наклонов фюзеляжа, изменения режимов несущих винтов вертолета.
При отказе газотурбинных двигателей основной силовой установки несущего винта кинематически независимые маршевые электродвигатели создают горизонтальную тягу и обеспечивают создание подъемной силы при авторотации несущих винтов, а при посадке возможность поворота маршевых электродвигателей и изменение шага рулевых винтов обеспечивают управляемость вертолета, что увеличивает безопасность полета и посадки.
При всех вариантах загрузки вертолета центр его масс может перемещаться в достаточно широком диапазоне по продольной оси вертолета, что существенно влияет на балансировку и управляемость вертолета. Возможность изменения продольной центровки имеет большое практическое значение, так как ее величина изменяется от характера нагрузки вертолета.
Влияние груза на внешней подвеске обусловлено его массой, на нем могут возникать аэродинамические силы, что приводит к натяжению троса подвески. Как правило точка присоединения внешней подвески груза не совпадает с центром масс вертолета, а аэродинамическая сила на грузе создает как пикирующий, так и кабрирующий момент, в зависимости от центровки вертолета, режимов полета и параметров груза. Для достижения равновесия сил вдоль продольной оси вертолета изменяется угол тангажа вертолета или можно изменить центровку, откорректировав точку приложения силы натяжения троса внешней подвески.
Выбранная и предлагаемая схема компоновки вертолета позволяет иметь широкий диапазон продольной центровки, что повышает безопасность полетов.
Для реализации контролируемого изменения продольной центровки и перемещения центра масс вертолета, при выполнении монтажных работ с грузом на внешней подвеске, вертолет оснащен дополнительной крановой лебедкой на каретке с устройством крепления груза и с возможностью перемещения каретки крановой лебедки по крановым направляющим вдоль оси вертолета, в пространстве технологической полости, между осями несущих винтов.
Для реализации перемещения каретки крановой лебедки используется стандартная система линейного перемещения крановой лебедки, применяемая в промышленности, с электрическим сервоприводом. Направляющие системы линейного перемещения монтируют на корпусе фюзеляжа вертолета.
На пилонах стоек шасси расположены четыре крановые лебедки, которые используются для дополнительного креплении груза на внешней подвеске и обеспечения жесткости грузовой системы: вертолет, внешняя грузовая подвеска, груз. Смещение общего центра масс такой грузовой системы вниз и повышение жесткости грузовой подвески улучшает управляемость вертолета, повышает безопасность полета с грузом и обеспечивает дополнительную возможность перемещения и позиционирования груза при монтаже и разгрузке.
Система управления контролируемого перемещения центра масс вертолета взаимодействует с системой управления несущими винтами, автопилотом и системой стабилизации по курсу.
Управление вертолетом обеспечивается автоматом перекоса лопастей несущих винтов, создающих вертикальную и горизонтальную - пропульсивную тяги, и изменением шага винтов. Автомат перекоса лопастей несущих винтов изменяет направление вектора аэродинамической силы, обеспечивая управление вертолетом по углам тангажа и крена.
Шасси вертолета имеет механизм управления с приводом для изменения направления движения вертолета по поверхности аэродрома или иной ровной твердой поверхности. Каждая стойка шасси управляется отдельно, что позволяет осуществлять поворот, разворот вертолета. Как минимум одна стойка шасси под передней и задней кабиной экипажа вертолета снабжена гидро- или электроприводом. Это позволяет перемещать вертолет без соединения с тягачом, без запуска основных газотурбинных двигателей силовой установки. Вертолет может самостоятельно подъехать к грузу и выполнить погрузочные работы, выехать на полосу взлета или доехать до места разгрузки или стоянки. Это позволяет повысить безопасность погрузочно-разгрузочных работ, повысить топливную экономичность, снизить стоимость работ вертолета, поскольку не запускаются газотурбинные двигатели силовой установки, а запускается и работает только турбоэлектрогенератор.
Дополнительно с внешней стороны пилонов со стойками шасси могут быть прикреплены жесткие поплавки с реданами параллельно продольной оси крановой балки вертолета, что позволяет обеспечить возможность посадки на воду для забора воды или для выполнения спасательных операций. С одного конца на торце поплавка располагается водометный движитель с приводом от электродвигателя, запитанного от турбоэлектрогенераторов вертолета. Водометные движители позволяют разогнать вертолет по водной поверхности, набрать скорость и с помощью реданов облегчить подъем вертолета при взлете. Управление водометными движителями позволяет выполнять эволюции на водной поверхности, менять курс движения, при реверсе одного движителя появляется возможность развернуть вертолет с минимальным радиусом поворота, для маневров в стесненных условиях акватории порта. В нижней части поплавков, обращенных к воде, имеются отверстия, соединенные системой трубопроводов с отбором высокого давления в средней части компрессора газотурбинного двигателя для создания воздушной каверны, воздушные пузырьки которой снижают сопротивление движению поплавка в воде.
Наличие реданов облегчает отрыв поплавка при взлете, при этом реданы направлены в одну сторону. Кормовые срезы реданов снабжены интерцепторами в виде небольших пластин выступающих из днища поплавка на величину 0,5-1% от ширины редана, выдвижение которых осуществляется по сигналу от системы автоматического управления вертолета, определяющей скорость движения вертолета. Величина выдвижения интерцепторов определяет увеличение гидродинамического качества поплавка при взлете. Взлет с поверхности воды возможен только при движении в одном направлении. Для увеличения скорости движения и взлета дополнительно используются рулевые винты в маршевом режиме.
Низкий центр масс вертолета позволяет иметь высокую остойчивость на водной поверхности, наличие водометных движителей позволяет перемещаться на водной поверхности и разгонять вертолет для взлета.
Для увеличения универсальности вертолета и снижения эксплуатационных расходов, оборудование для тушения пожаров расположено в гидроемкости для воды.
На нижней поверхности гидроемкости расположен гидромонитор турельный с гидрогенератором, ближе к центру емкости крепится шланг для забора воды, на конце которого закреплен гидронасос забора воды. Гидроемкость, имеет систему электропитания и управления, соединяющуюся с вертолетными системами посредством герметичного быстроразъемного соединения. Сама гидроемкость жестко подвешивается в технологической полости вертолета к крановой каретке, дополнительно крепится нижней частью к грузовым лебедкам. Для забора воды гидронасос забора воды на конце шланга забора воды опускается и поднимается грузовой лебедкой, расположенной на краю пилона со стойкой шасси. В режиме забора воды вертолет зависает над поверхностью воды и опускает шланг забора воды с насосом в воду. Электроснабжение гидронасоса воды, гидромонитора турельного, гидрогенератора осуществляется от турбоэлектрогенераторов вертолета, а управление осуществляется из кабины пилотов.
При тушении пожара управление гидромонитором турельным с гидрогенератором может осуществляться с наземного поста управления по радиоканалу через систему автоматического управления вертолета. Конструкция вертолета обеспечивает эффективное управление потоками (струями) воды в режиме висения вертолета при тушении пожара.
Система управления вертолетом имеет в своем составе автоматическое устройство, изменяющее частоту вращения несущих винтов и угол установки лопастей в зависимости от показаний датчика крутящего момента на валу каждого несущего винта, частоту вращения рулевых винтов в зависимости от показаний датчика крутящего момента на валах рулевых винтов. Автоматическое устройство, в зависимости от сигналов управления, осуществляет поворот рулевых винтов, стоек шасси, управляет приводами шасси и водометами в поплавках, интерцепторами на реданах поплавков.
Автоматическое устройство снабжено автопилотом, выполненного с функцией автоматической стабилизации горизонтального положения фюзеляжа и контролируемого перемещения центра масс вертолета, системой автоматического управления автоматом перекоса несущих винтов, рулевых винтов, системой стабилизации по курсу для осуществления полета вертолета с продольной схемой расположения несущих винтов, с поперечной схемой расположения несущих винтов или с диагональным расположением несущих винтов.
Наличие датчиков крутящего момента позволяет регулировать крутящий момент газотурбинных двигателей силовой установки в зависимости от требуемой мощности несущего винта. Наличие датчиков крутящего момента на валах рулевых винтов позволяет управлять электродвигателями приводов рулевых винтов. Это позволяет экономить затраты топлива и повысить общую эффективность силовой и энергетической установки вертолета.
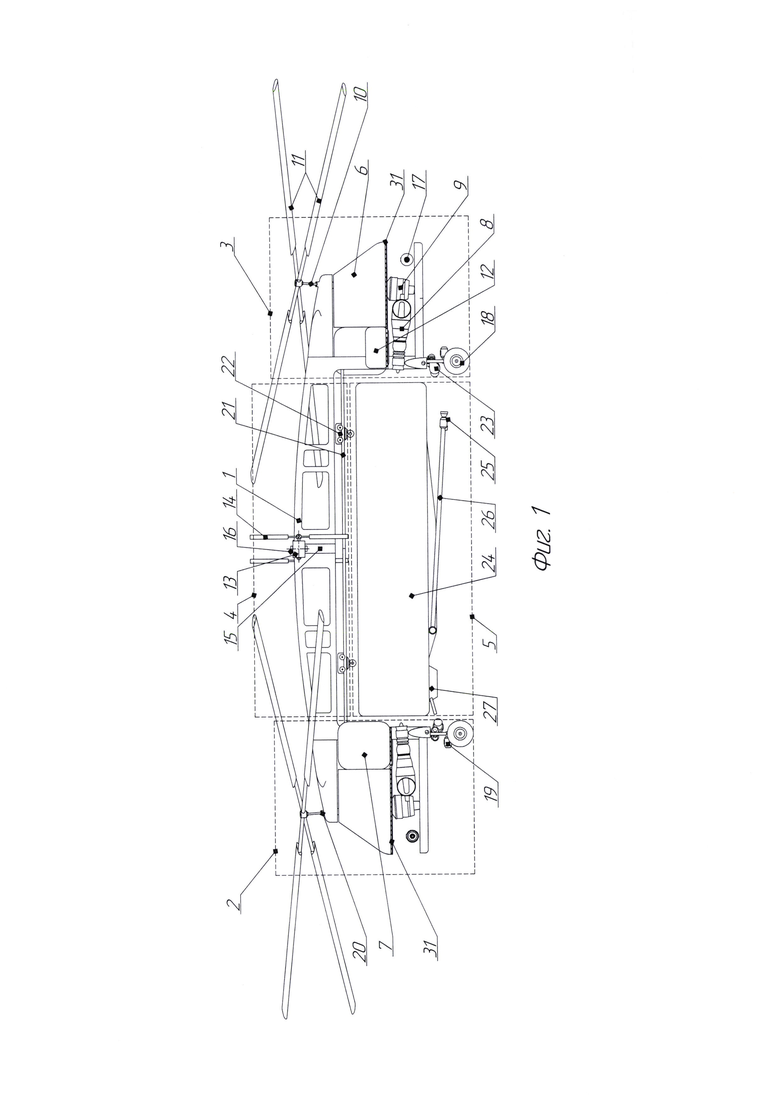
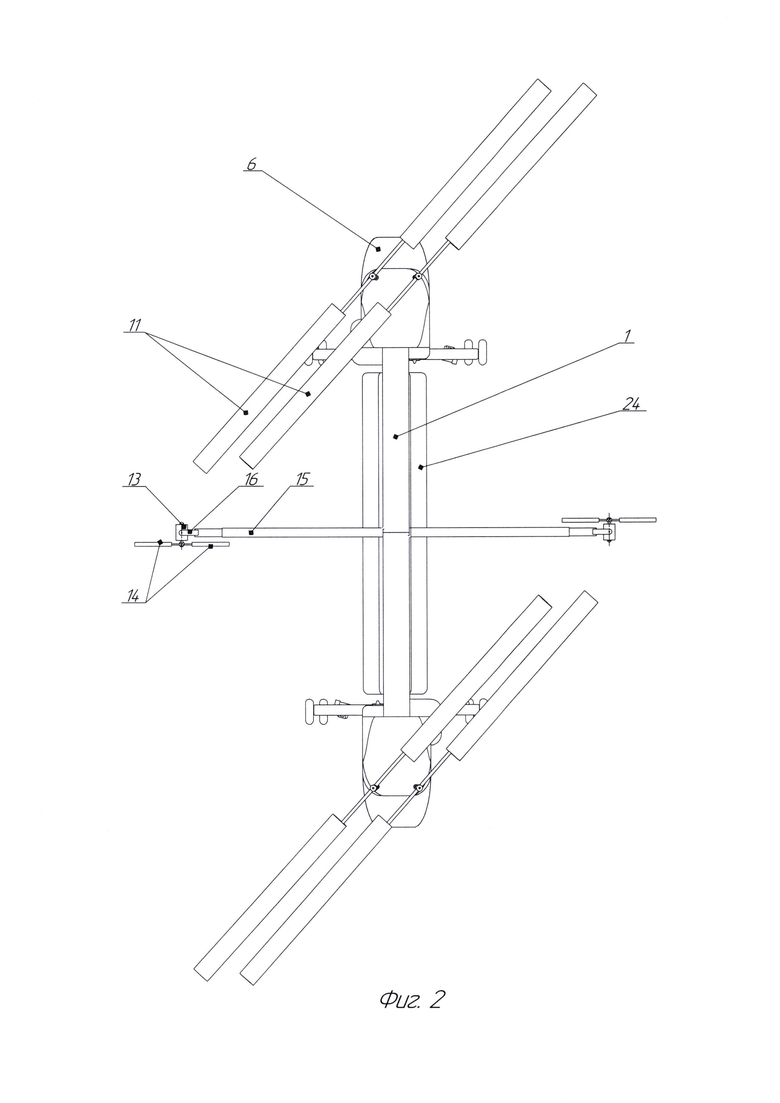
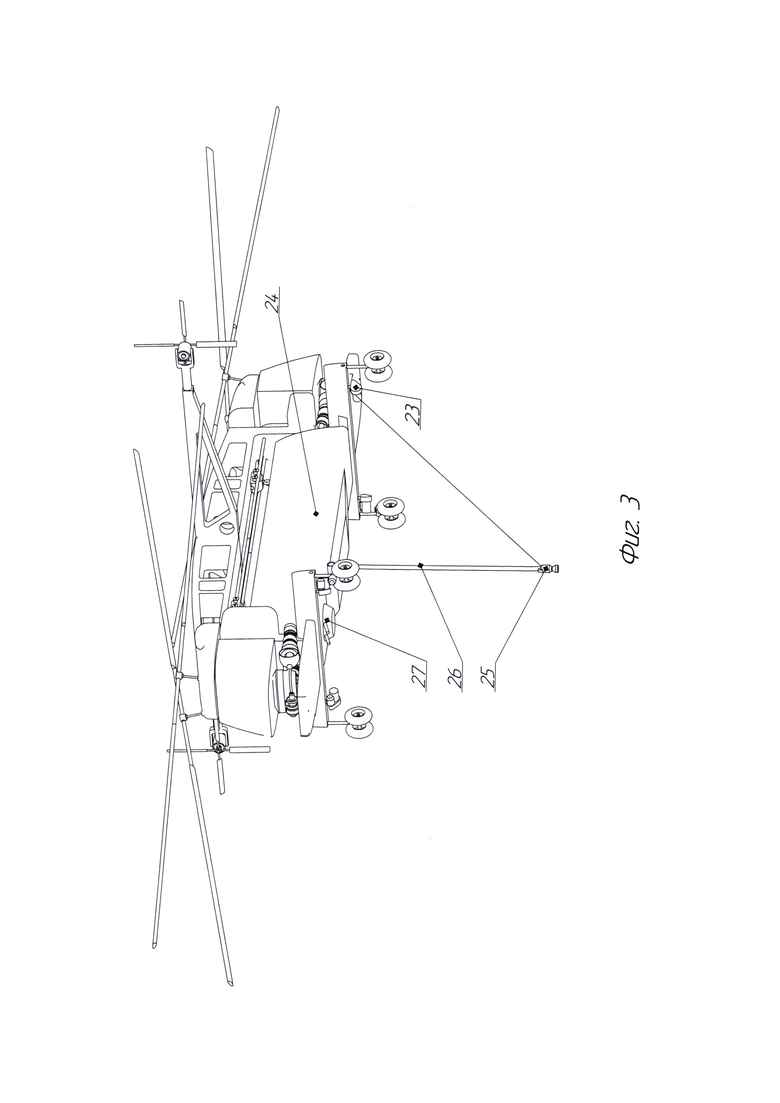
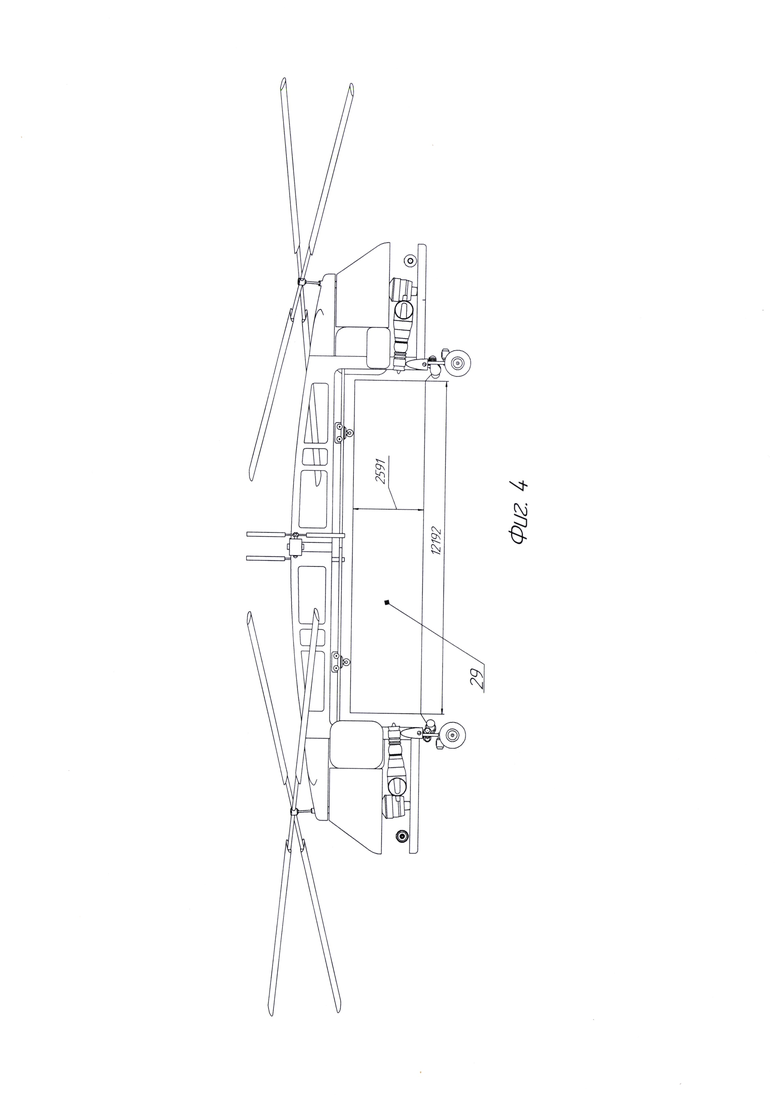
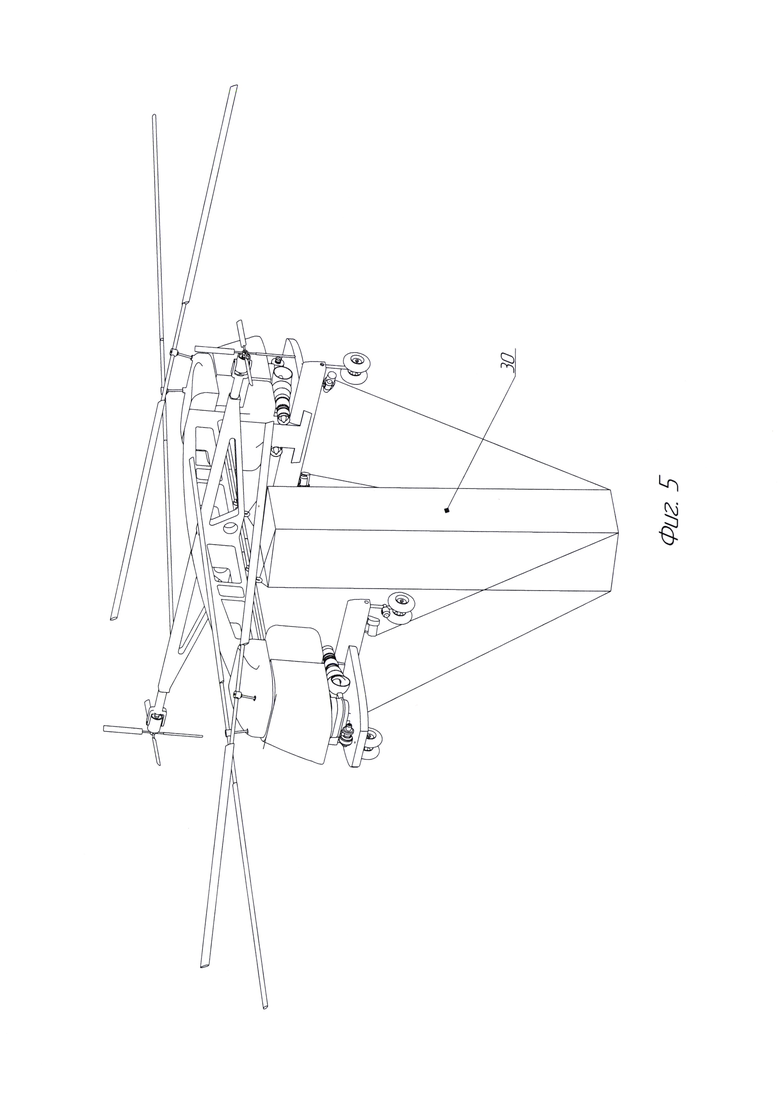
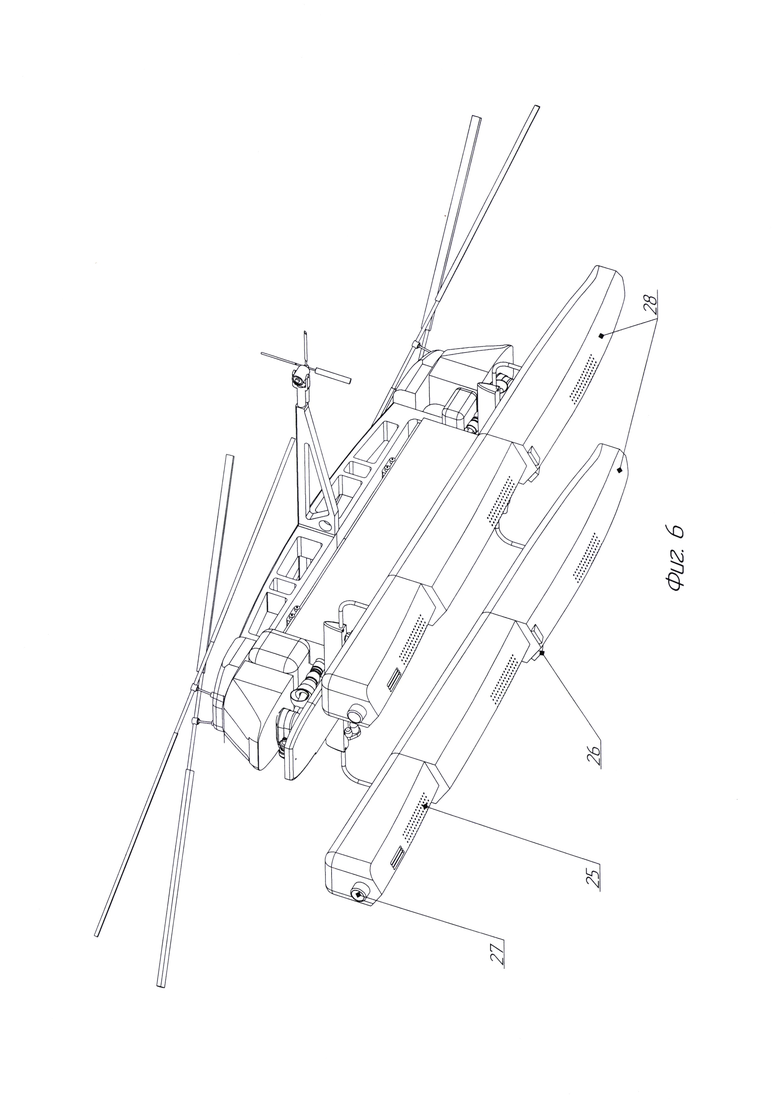
На фиг. 1 представлен заявляемый вертолет, вид сбоку, на фиг. 2 - вид сверху, на фиг. 3 - схема забора воды, на фиг. 4 - вид сбоку со стандартным контейнером в технологической нише, на фиг. 5 - схема крепления груза на внешней подвеске, на фиг. 6 - с жесткими поплавками, где:
1 - пространственная силовая рама;
2 - кабина фюзеляжа передняя;
3 - кабина фюзеляжа задняя;
4 - крановая балка;
5 - технологическая полость;
6 - кабина экипажа (передняя и задняя);
7 - кабина крановщика (передняя и задняя);
8 - газотурбинные двигатели силовой установки;
9 - редукторы несущих винтов (передний и задний);
10 - валы несущих винтов;
11 - несущие винты;
12 - топливные баки (передний и задний);
13 - маршевые электродвигатели рулевых винтов;
14 - рулевые винты;
15 - пилон рулевого винта;
16 - вилочный подвес;
17 - турбоэлектрогенератор;
18 - управляемая стойка шасси;
19 - управляемая стойка шасси с электроприводом;
20 - опорно-упорный подшипник с датчиком крутящего момента;
21 - направляющие крановой лебедки;
22 - каретка с крановой лебедкой;
23 - лебедка внешней подвески груза;
24 - гидроемкость;
25 - гидронасос забора воды;
26 - шланг забора воды;
27 - гидромонитор турельный с гидрогенератором;
28 - жесткий поплавок с реданами и водометом;
29 - контейнер;
30 - груз на внешней подвеске;
31 - противопожарная перегородка.
Фюзеляж вертолета состоит из трех функциональных частей: кабины фюзеляжа передней 2, кабины фюзеляжа задней 3 и крановой балки 4, объединенных пространственной силовой рамой 1. Кабины фюзеляжа 2 и 3, соединенные крановой балкой 4, крепятся на элементах пространственной силовой рамы 1 и могут иметь различное конструктивное и функциональное исполнение. Между кабинами фюзеляжа 2 и 3, соединенных в верхней части крановой балкой 4, располагается технологическую полость 5 для размещения гидроемкости 24, контейнера 29, груза на внешней подвеске 30.
В кабинах фюзеляжа 2 и 3 расположены кабины экипажа 6 (передняя и задняя). Дополнительно имеются кабины крановщиков 7 (передняя и задняя), которые расположены по краям технологической полости 5 фюзеляжа. Рядом с кабинами крановщиков 7 расположены топливные баки 12. Под кабинами экипажа 6 и крановщиков 7 на конструкциях пространственной силовой рамы 1 находится силовая установка в составе: газотурбинные двигатели силовой установки 8, редукторы несущих винтов 9, турбоэлектрогенераторы 17. Силовая установка отделена от кабин экипажа 6 и кабин крановщиков 7 противопожарной перегородкой 31, а агрегаты (газотурбинные двигатели силовой установки 8, редукторы несущих винтов 9, турбоэлектрогенераторы 17) крепятся через амортизаторы, что снижает вибрационные нагрузки на экипаж от силовой установки.
Над кабинами экипажа 6 и крановщиков 7 находится часть пространственной силовой рамы 1, которая несет опорно-упорный подшипник с датчиком крутящего момента 20, валов несущих винтов 10.
Силовая установка, состоящая из двух спаренных между собой газотурбинных двигателей 8, соединенных редуктором 9, приводит в действие два синхронно-вращающихся несущих винта 11 с возможностью изменения общего шага винтов как совместно, так и дифференциально.
Валы несущих винтов 10 установлены попарно с развалом валов в 10-20 градусов и наклоненных на угол не более 5 градусов в разные стороны от вертикали перпендикулярной продольной оси фюзеляжа вертолета, и жестко связанны редукторами 9, при этом роторы несущих винтов 11 вращаются синхронно и перекрещиваются.
В задней части передней кабины фюзеляжа 2 и в передней части задней кабины фюзеляжа 3 имеются пилоны, образованные частями пространственной силовой рамы 1, на концевых участках которых, располагаются стойки управляемого шасси 18 и управляемые стойки шасси с электроприводом 19.
Вместо стоек шасси 18 и 19 или совместно имеется возможность смонтировать жесткие поплавки с реданами и водометом 28 для реализации возможности посадки на воду, для забора воды или для выполнения спасательных операций.
В средней части крановой балки 4 соединяющей кабины фюзеляжа 2 и 3, перпендикулярно ее оси, расположены пилоны рулевого винта 15, на конце которых находится вилочный подвес 16 маршевого электродвигателя рулевых винтов 13 с рулевыми винтами 14 изменяемого шага и автоматом перекоса. Размер пилонов рулевого винта 15 позволяет расположить рулевые винты 14 вне зоны дисков несущих винтов 11.
Маршевые электродвигатели рулевых винтов 13 имеют возможность поворачиваться на 180 градусов в горизонтальной плоскости относительно оси вилочного подвеса 16 для изменения направления вектора тяги.
На нижней части крановой балки 4 крепятся направляющие крановой лебедки 21, по которым движется каретка с крановой лебедкой 22, В нижней части кабин фюзеляжа 2 и 3 на пилонах со стойками шасси 18 и 19 шарнирно закреплены лебедки внешней подвески груза 23. Лебедки внешней подвески груза 23 используются для дополнительного крепления груза на внешней подвеске 30, гидронасоса забора воды 25 со шлангом забора воды 26, при заборе воды из водоемов или при посадке на водную поверхность.
Лебедки внешней подвески груза 23 позволяют зафиксировать груз для предотвращения его раскачивания или повернуть его при выполнении строительно-монтажных работ. Одна из лебедок позволяет опускать в воду и поднимать шланг забора воды 26 с гидронасосом забора воды 25.
Гидроемкость 24 крепиться в технологической полости 5 к направляющим крановой лебедки 21 в верхней части и узлов крепления к пилонам кабин фюзеляжа 2 и 3 с использованием лебедок внешней подвески груза 23.
Гидроемкость 24 представляет собой агрегат для тушения пожаров, который получает электропитание и управляется с борта вертолета. На гидроемкости 24 смонтирован гидромонитор турельный с гидрогенератором 27, шланг забора воды 26 с гидронасосом забора воды 25 на конце. Гидронасос забора воды 25 крепится к тросу одной из крановых лебедок внешней подвески груза 23.
Когда гидроемкость 24 демонтирована, в технологической полости 5, на направляющие крановой лебедки 21 устанавливается каретка с крановой лебедкой 22.
В технологической полости 5 может располагаться специальный грузовой контейнер 29, который крепится к направляющим крановой лебедки 21 в верхней части и дополнительно крепиться к элементам крепления на пилонах кабин фюзеляжа 2 и 3 тросами крановыми лебедками внешней подвески груза 23 в нижней части.
На каретке с крановой лебедкой 22 может крепиться груз на внешней подвеске 30, который дополнительно может тросами крепиться с использованием крановых лебедок внешней подвески груза 23, что предотвращает раскачивание груза или его смещение и нарушения центровки вертолета.
Пожарный гидровертолет-кран работает следующим образом: крутящий момент от газотурбинных двигателей силовой установки 8 через редукторы несущих винтов 9 (передний и задний), валы несущих винтов 10 передается несущим винтам 11. Валы несущих винтов 10 передают усилие на пространственную силовую раму 1 через опорно-упорный подшипник с датчиком крутящего момента 20. Спаренные несущие винты 11 вращаются в разные стороны. Левые вращаются слева направо, а правые - справа налево, реактивные моменты этих винтов компенсируют друг друга, тем самым исключая вращение вертолета-крана вокруг его центра масс.
Изменение направления векторов тяги несущих винтов осуществляется с помощью классических автоматов перекоса.
Для забора воды вертолет зависает на высоте 6…8 метров от поверхности воды, гидронасос забора воды 25 опускается на тросе в воду и включается в работу по заполнению гидроемкости 24. Медленное наполнение водой гидроемкости 24 позволяет контролировать и увеличивать мощность газотурбинных двигателей 8 и несущую способность несущих винтов 11 благодаря наличию опорно-упорного подшипника с датчиком крутящего момента 20.
После заполнения водой гидроемкости 24, гидронасос забора воды 25 отключается и поднимается на тросе крановой лебедки внешней подвески груза 23.
Пожарный гидровертолет-кран направляется для тушения пожара и посредством подачи воды и пенного раствора из гидромонитора турельного с гидрогенератором 27 осуществляет тушение огня. Для направления струй воды в очаг возгорания используется работа органами продольного и поперечного путевого управления вертолета и гидромонитора турельного с гидрогенератором 27.
При тушении пожара гидромонитор турельный 27 и гидронасос подачи воды 25 получают электропитание от турбоэлектрогенератора 17.
Для реализации контролируемого перемещения центра масс вертолета, при выполнении монтажных работ с грузом на внешней подвеске, каретка с крановой лебедкой 22 перемещается по направляющим крановой лебедки 21, в зависимости от необходимого направления движения вертолета.
Топливные баки 12 так же могут использоваться для изменения центровки вертолета путем контролируемой перекачки топлива из одного бака в другой при выполнении высокоточных строительно-монтажных работ.
Для управления электронно-управляемыми исполнительными механизмами изменения шага лопастей несущих винтов 11 и рулевых винтов 14 присутствует блок автоматического управления (условно не показан), который воспринимает сигналы: с одной стороны от педалей и ручки управления в кабине пилота, а с другой стороны от датчиков скорости движения фюзеляжа всего вертолета, относительно осей вращения несущего винта 11, скорости вращения несущих винтов 11, от датчиков скорости вращения лопастей рулевых винтов 14, от датчиков положения угла установки лопастей несущего винта 11 и рулевого винта 14, от датчиком крутящего момента в опорно-упорном подшипнике с датчиком крутящего момента 20 на каждом валу несущего винта 10 и на каждом валу рулевого винта 14.
Для выработки управляющих сигналов, пропорциональных положению педалей пилота с требуемой скоростью углового перемещения фюзеляжа 1 вертолета, блок автоматического управления обрабатывает сигналы от всех датчиков и рассчитывает требуемые углы установки лопастей несущих винтов 11 и рулевых винтов 14.
Управляющие сигналы меняются для корректировки положения кабин фюзеляжа 2 и 3 вертолета при выбранной траектории полета. Тяга отдельных несущих винтов 11 и рулевых винтов 14 меняется для компенсации внешнего воздействия на вертолет, такого как ветер или влияние аэродинамического воздействия на груз на внешней подвеске 30.
В блоке автоматического управления формируется связь между скоростью перемещения ручки управления пилота и величиной и направлением тяги рулевого винта 14, несущего винта 11 или для перемещения каретки с крановой лебедкой 22.
При выполнении высокоточных строительно-монтажных работ блок автоматического управления дополнительно получает сигналы от датчиков натяжения троса каретки с крановой лебедкой 22 и от датчиков натяжения троса крановых лебедок внешней подвески груза 23, что позволяет в автоматическом режиме изменять углы атаки несущих винтов 11 и рулевых винтов 14 для выравнивания натяжения тросов и корректировки положения груза на внешней подвеске 30. Одновременно блок автоматического управления управляет кареткой с крановой лебедкой 22 и крановыми лебедками внешней подвески груза 23. При необходимости, в ручном режиме управления, блок автоматического управления осуществляет согласованную работу каретки с крановой лебедкой 22 и крановых лебедок внешней подвески груза 23 при подъеме или опускании груза на внешней подвеске.
Система автоматического управления снабжена автопилотом с функцией автоматической стабилизации горизонтального положения фюзеляжа и контролируемого перемещения центра масс вертолета, с функцией автоматической стабилизации по курсу для осуществления полета вертолета в режиме с продольной схемой расположения несущих винтов, с поперечной схемой расположения несущих винтов или с диагональным расположением несущих винтов.
Стабилизация по курсу используется для управления по курсу в полете, для чего изменяется шаг винтов 14 на разную величину, и для прямолинейного полета в прямом и обратном направлении. Наличие двух рулевых винтов 14 позволяет осуществлять контролируемое высокоточное позиционирование вертолета при выполнении строительно-монтажных работ и для компенсации внешних воздействий на вертолет в режиме висения и на всех режимах полета вертолета.
В автоматическом устройстве формируется связь между скоростью перемещения ручки управления в кабине экипажа и исполнительными устройствами осуществляющими поворот рулевых винтов 14, стоек шасси 18 и 19, исполнительными устройствами управления приводом шасси 19 и водометов в жестких поплавках с реданами 28, исполнительными устройствами передвижения интерцепторов на реданах жестких поплавков 28. Автоматическое устройство управления снабжено автопилотом с функцией автоматической стабилизации горизонтального положения фюзеляжа и контролируемого перемещения центра масс вертолета, с функцией автоматической стабилизации по курсу для осуществления полета вертолета в режиме с продольной схемой расположения несущих винтов, с поперечной схемой расположения несущих винтов или с диагональным расположением несущих винтов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухвинтовой сверхтяжёлый многоцелевой вертолёт продольной схемы | 2024 |
|
RU2833731C1 |
| ВЕРТОЛЕТ ДЛЯ КРАНОВО-МОНТАЖНЫХ РАБОТ | 2007 |
|
RU2341410C1 |
| ВЕРТОЛЕТНАЯ РОБОТИЗИРОВАННАЯ УНИВЕРСАЛЬНАЯ СИСТЕМА (ВРУС) | 2020 |
|
RU2754643C1 |
| Устройство компенсации реактивного момента несущего винта вертолета | 2021 |
|
RU2788013C1 |
| ТРАНСПОРТНО-БОЕВОЙ ВЕРТОЛЕТ (варианты) | 2021 |
|
RU2768998C1 |
| Устройство компенсации реактивного момента несущего винта вертолета | 2021 |
|
RU2796703C2 |
| Сверхтяжелый четырехвинтовой многоцелевой вертолёт | 2018 |
|
RU2701369C1 |
| КОМБИНИРОВАННЫЙ ВЕРТОЛЕТ | 1994 |
|
RU2089456C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ И/ИЛИ С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ С УКОРОЧЕННЫМ ПРОБЕГОМ | 2021 |
|
RU2764311C1 |
| Сверхтяжелый трехвинтовой многоцелевой вертолёт | 2018 |
|
RU2696680C1 |
Изобретение относится к области авиации, в частности к конструкциям пожарных вертолетов. Вертолет содержит несущую систему, силовую установку, турбоэлектрогенераторы, фюзеляж с передней и задней кабинами пилотов и крановщиков, левым и правым пилонами с поворотными маршевыми рулевыми винтами, пилонами со стойками четырехточечного управляемого самоходного шасси, крановую систему крепления груза или автономной цистерны с гидромонитором и шлангом забора воды в технологической полости фюзеляжа. В передней и задней частях фюзеляжа имеется по два несущих винта жесткой конструкции безшарнирного крепления к втулке винта на конце валов. Валы установлены попарно с развалом валов в 10-20 градусов и наклонены на угол не более 5 градусов в разные стороны от вертикали, перпендикулярной продольной оси фюзеляжа вертолета. Силовая и турбоэлектрогенераторная установки расположены в нижней части фюзеляжа и отделены от кабин экипажа противопожарной переборкой. Технологическая полость для размещения груза позволяет расположить центр масс груза максимально близко к центру масс вертолета. Вертолет имеет систему электронного управления несущей системой, рулевыми винтами, крановой системой. Обеспечивается улучшение управляемости полета на всех режимах, повышение путевой скорости. 3 н. и 1 з.п. ф-лы, 6 ил.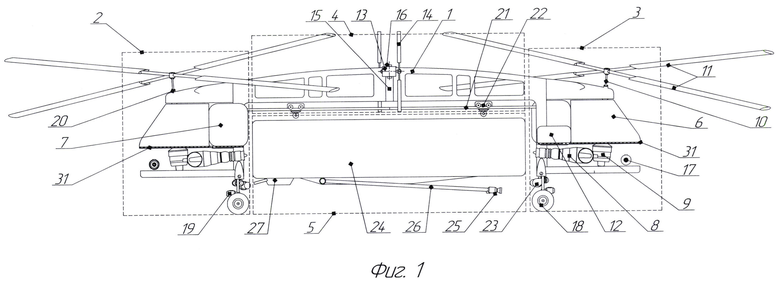
1. Вертолет, содержащий несущие винты, газотурбинные двигатели, муфты свободного хода, редуктора, топливные баки, фюзеляж, четырехстоечное восьмиколесное шасси, гидроемкость, гидронасос, четырехствольный турельный монитор, лебедки для опускания и поднимания, с возможностью установки грузового пола, отличающийся тем, что реализуется возможность выполнения полета с продольным расположением несущих винтов относительно направления полета, с поперечным расположением винтов или при расположении несущих винтов под любым углом к направлению полета, для чего в передней и задней частях фюзеляжа, имеется по два несущих винта жесткой конструкции, безшарнирного крепления к втулке винта на конце валов, установленных попарно с развалом валов в 10-20 градусов, и наклоненных на угол не более 5 градусов в разные стороны от вертикали, перпендикулярной продольной оси фюзеляжа вертолета, жестко связанных с редукторами, при этом втулки роторов винтов вращаются синхронно, а лопасти винтов перекрещиваются, имеется возможность изменения общего шага винтов как совместно, так и дифференциально, на каждый редуктор, установленный в нижней части фюзеляжа, работает два газотурбинных двигателя, фюзеляж представляет собой пространственную конструкцию с силовой рамой, симметричную относительно центра масс, выполненную из двух, зеркально-расположенных, полумонококовых кабин фюзеляжа с отдельными кабинами экипажа и крановщиков, топливных баков, и крановой балки, соединяющей переднюю и заднюю кабины фюзеляжа в верхней части, и образующих технологическую полость в средней части фюзеляжа для груза, при этом кабины экипажа и крановщиков крепятся к элементам силовой рамы на амортизаторах, как и расположенные под кабинами газотурбинные двигатели, редуктора и турбоэлектрогенераторы, отделенные от топливных баков, кабин экипажа и крановщиков дополнительной противопожарной перегородкой, в средней части крановой балки, перпендикулярно продольной оси симметрично расположены пилоны силовой рамы, на концах которых находится вилочный подвес маршевых электродвигателей с возможностью поворота на угол 180 градусов в горизонтальной плоскости, приводящих во вращение рулевые винты изменяемого шага, снабженные автоматом перекоса лопастей и располагающиеся вне зоны дисков вращения несущих винтов, в нижней части кабин фюзеляжа у края технологической полости по краям нижних пилонов силовой рамы расположены стойки шасси с механизмом управления для изменения направления движения по твердой поверхности, управляемые каждая в отдельности, и как минимум одна стойка шасси под передней и задней кабинами фюзеляжа вертолета снабжена гидро- или электроприводом, четыре грузовые лебедки шарнирно закреплены по краям нижних пилонов силовой рамы рядом со стойками шасси, обращенными внутрь технологической полости для крепления грузовой платформы и груза, трос внешней подвески груза одним концом закрепляется на каретке с крановой лебедкой, имеющей возможность перемещаться по направляющим, проложенным под крановой балкой фюзеляжа, для изменения центра масс вертолета в полете и при выполнении монтажных операций.
2. Вертолет по п. 1, отличающийся тем, что оборудование для тушения пожаров в виде гидромонитора турельного с гидрогенератором, шланга для забора воды и гидронасоса забора воды, располагается в нижней части гидроемкости, имеющей систему электропитания и управления, соединенной с вертолетными системами посредством герметичного быстроразъемного соединения, жестко подвешенной в технологической нише вертолета, при заборе воды гидронасос забора воды на конце шланга забора воды опускается и поднимается грузовой лебедкой, расположенной на краю нижнего пилона силовой рамы со стойкой шасси, при этом электроснабжение гидромонитора турельного, гидрогенератора и гидронасоса забора воды осуществляется от турбоэлектрогенераторов вертолета, а управление осуществляется из кабины пилотов или по радиоканалу с внешнего поста управления на земле.
3. Вертолет, отличающийся тем, что с внешней стороны нижних пилонов силовой рамы вертолета вместо или рядом со стойками шасси имеется возможность установить жесткие поплавки с реданами параллельно продольной оси крановой балки вертолета для посадки на воду, при этом поплавки с одного конца снабжены водометными движителями, управление которыми позволяет совершать эволюции на водной поверхности, питающимися от турбоэлектрогенераторов вертолета, дополнительно в нижней части поплавков, обращенной к воде, имеются отверстия, соединенные системой трубопроводов с отбором высокого давления средней части компрессора газотурбинного двигателя силовой установки вертолета для создания воздушной каверны, при этом реданы направлены в одну сторону, снабжены интерцепторами, управляющимися от системы автоматического управления вертолета, позволяющими облегчить взлет с поверхности воды при движении в одном направлении, дополнительно для взлета используются рулевые винты в маршевом режиме.
4. Вертолет, отличающийся тем, что система управления вертолетом имеет в своем составе автоматическое устройство, в котором формируется связь между скоростью перемещения ручки управления в кабине экипажа и исполнительными устройствами изменяющими частоту вращения несущих винтов и угол установки лопастей в зависимости от показаний датчика крутящего момента на валу каждого несущего винта, частоту вращения рулевых винтов и угол установки лопастей в зависимости от показаний датчика крутящего момента на валах рулевых винтов, исполнительными устройствами осуществляющими поворот рулевых винтов, стоек шасси, исполнительными устройствами управления приводом шасси и водометов в поплавках, исполнительными устройствами передвижения интерцепторов на реданах поплавков, при этом автоматическое устройство снабжено автопилотом с функцией автоматической стабилизации горизонтального положения фюзеляжа и контролируемого перемещения центра масс вертолета, с функцией автоматической стабилизации по курсу для осуществления полета вертолета в режиме с продольной схемой расположения несущих винтов, с поперечной схемой расположения несущих винтов или с диагональным расположением несущих винтов.
| МНОГОЦЕЛЕВОЙ МНОГОВИНТОВОЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2016 |
|
RU2629483C1 |
| ВЕРТОЛЕТ ДЛЯ КРАНОВО-МОНТАЖНЫХ РАБОТ | 2007 |
|
RU2341410C1 |
| US 9845151 B2, 19.12.2017 | |||
| DE 102007020609 B4, 03.07.2014 | |||
| CN 206476105 U, 08.09.2017. | |||

